Embed Size (px)
Citation preview

2008.01.09.
1
Modeliranje digitalnih sistema
Razlozi upotrebe digitalnih modela
• Upotreba računara (obrada)
• Kodovanje signala
– Prenos signala na daljinu bez smetnji
• Vremenski multipleks
2008.01.09.
2
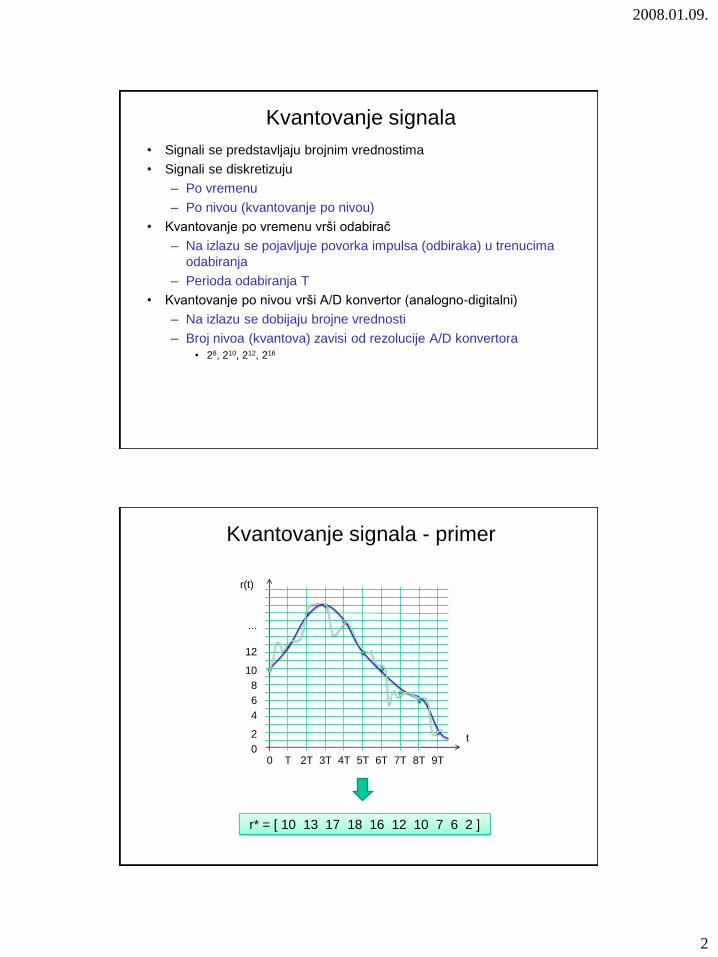
Kvantovanje signala
• Signali se predstavljaju brojnim vrednostima
• Signali se diskretizuju
– Po vremenu
– Po nivou (kvantovanje po nivou)
• Kvantovanje po vremenu vrši odabirač
– Na izlazu se pojavljuje povorka impulsa (odbiraka) u trenucima
odabiranja
– Perioda odabiranja T
• Kvantovanje po nivou vrši A/D konvertor (analogno-digitalni)
– Na izlazu se dobijaju brojne vrednosti
– Broj nivoa (kvantova) zavisi od rezolucije A/D konvertora
• 28, 210, 212, 216
Kvantovanje signala - primer
0 T 2T 3T 4T 5T 6T 7T 8T 9T
t
r(t)
2
4
6
8
10
12
0
...
r* = [ 10 13 17 18 16 12 10 7 6 2 ]
2008.01.09.
3
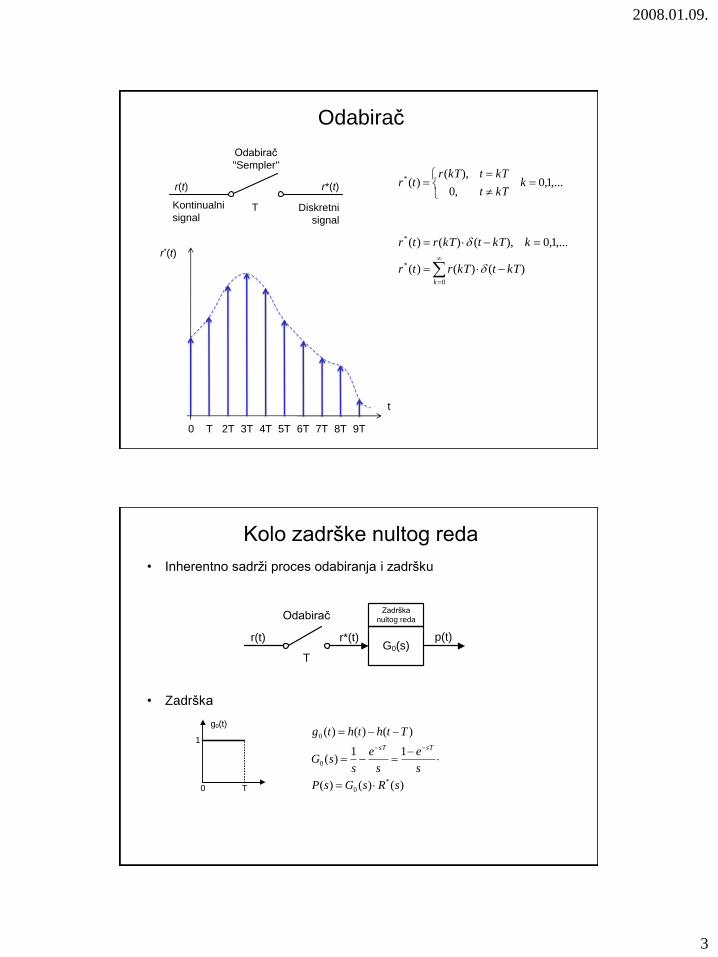
Odabirač
Kontinualni
signalDiskretni
signal
Odabirač
"Sempler"
r(t) r*(t)
T
,...1,0,0
),()(*
k
kTt
kTtkTrtr
0 T 2T 3T 4T 5T 6T 7T 8T 9T
t
r*(t)
0
*
*
)()()(
,...1,0),()()(
k
kTtkTrtr
kkTtkTrtr
Kolo zadrške nultog reda
• Inherentno sadrži proces odabiranja i zadršku
• Zadrška
Odabirač
r(t) r*(t)G0(s)
Zadrška
nultog reda
p(t)
T
g0(t)
0 T
1
)()()(
11)(
)()()(
*
0
0
0
sRsGsP
s
e
s
e
ssG
Tththtg
sTsT
2008.01.09.
4
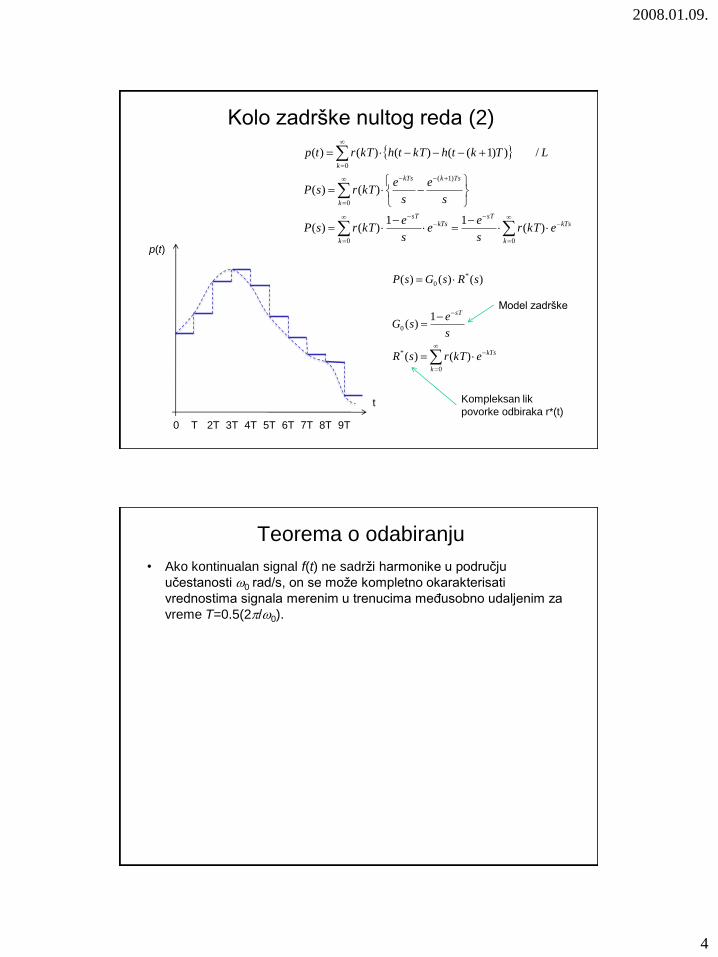
Kolo zadrške nultog reda (2)
0 T 2T 3T 4T 5T 6T 7T 8T 9T
t
p(t)
kTs
k
sTkTs
k
sT
k
TskkTs
k
ekTrs
ee
s
ekTrsP
s
e
s
ekTrsP
LTkthkTthkTrtp
00
0
)1(
0
)(11
)()(
)()(
/))1(()()()(
kTs
k
sT
ekTrsR
s
esG
sRsGsP
0
*
0
*
0
)()(
1)(
)()()(
Model zadrške
Kompleksan lik
povorke odbiraka r*(t)
Teorema o odabiranju
• Ako kontinualan signal f(t) ne sadrži harmonike u području
učestanosti 0 rad/s, on se može kompletno okarakterisati
vrednostima signala merenim u trenucima međusobno udaljenim za
vreme T=0.5(2/0).
2008.01.09.
5
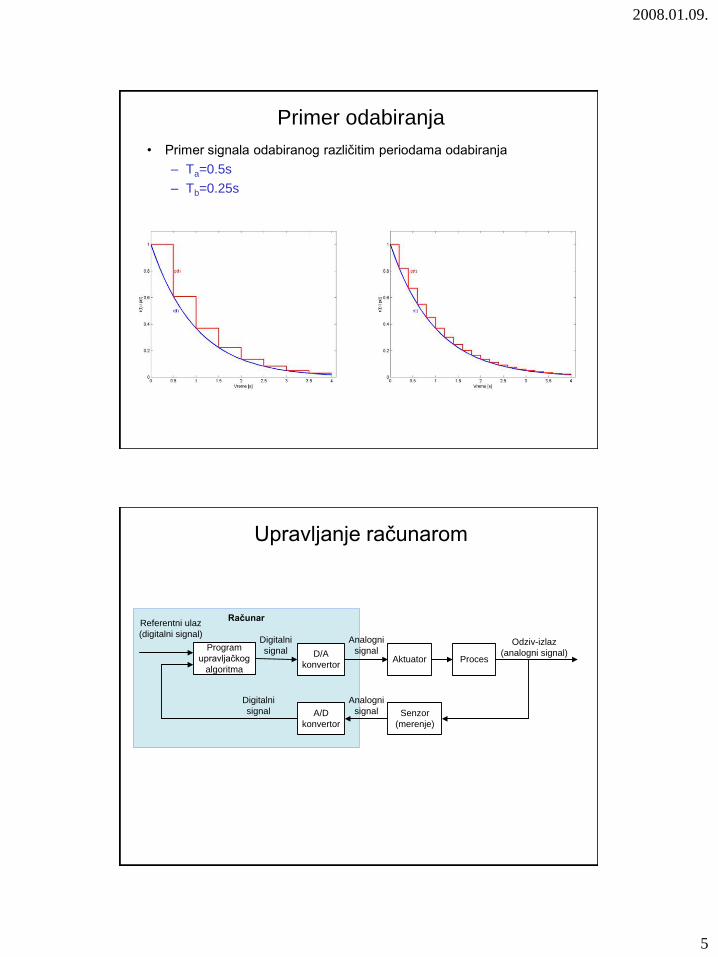
Primer odabiranja
• Primer signala odabiranog različitim periodama odabiranja
– Ta=0.5s
– Tb=0.25s
Računar
Program
upravljačkog
algoritma
D/A
konvertor
A/D
konvertor
Aktuator Proces
Senzor
(merenje)
Digitalni
signal
Analogni
signal
Referentni ulaz
(digitalni signal)Odziv-izlaz
(analogni signal)
Analogni
signal
Digitalni
signal
Upravljanje računarom

2008.01.09.
6
Hibridni sistem
• Sistemi sa mešovitim komponentama - "sampled-data systems"
– analognim i
– diskretnim
Digitalni
računar
Digitalno-
analogni
konvertor
Analogno
-digitalni
konvertor
Aktuator
i proces
u(kT) p(t)
r(kT)
Referentni ulazy(t)
Odziv-izlaz
m(t)m(kT)
Z-transformacija
• Povorka vremenski diskretizovanog signala i njegova Laplasova
transformacija
• Smena uvodi novu kompleksnu promenljivu z
• Z-transformacija povorke signala
0
*
0
*
)()(
)()()(
k
kTs
k
ekTrtrL
kTtkTrtr
0
*
)()(
)()()(
k
kzkTrzR
zRtrZtrZ
sTez
2008.01.09.
7
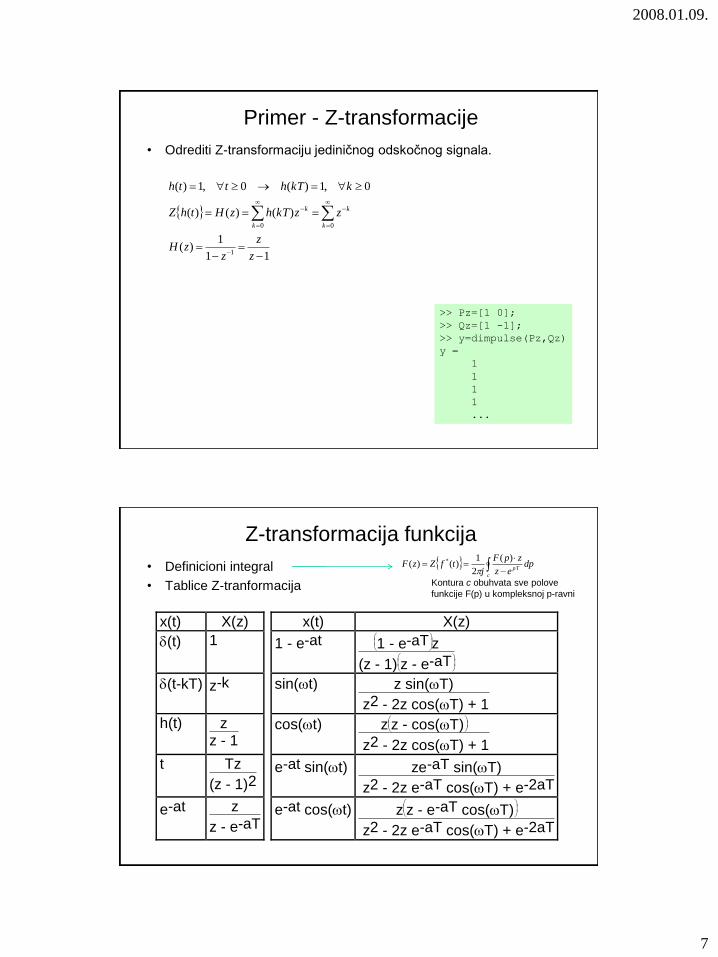
• Odrediti Z-transformaciju jediničnog odskočnog signala.
Primer - Z-transformacije
11
1)(
)()()(
0,1)(0,1)(
1
00
z
z
zzH
zzkThzHthZ
kkThtth
k
k
k
k
>> Pz=[1 0];
>> Qz=[1 -1];
>> y=dimpulse(Pz,Qz)
y =
1
1
1
1
...
Z-transformacija funkcija
• Definicioni integral
• Tablice Z-tranformacija
x(t) X(z) x(t) X(z)
(t) 1 1 - e-at
1 - e-aT z
(z - 1)
z - e-aT
(t-kT) z-k sin(t) z sin(T)
z2 - 2z cos(T) + 1
h(t) zz - 1
cos(t) z
z - cos(T)
z2 - 2z cos(T) + 1
t Tz
(z - 1)2
e-at sin(t) ze-aT sin(T)
z2 - 2z e-aT cos(T) + e-2aT
e-at z
z - e-aT e-at cos(t) z
z - e-aT cos(T)
z2 - 2z e-aT cos(T) + e-2aT
c
pTdp
ez
zpF
jtfZzF
)(
2
1)()( *
Kontura c obuhvata sve polove
funkcije F(p) u kompleksnoj p-ravni
2008.01.09.
8
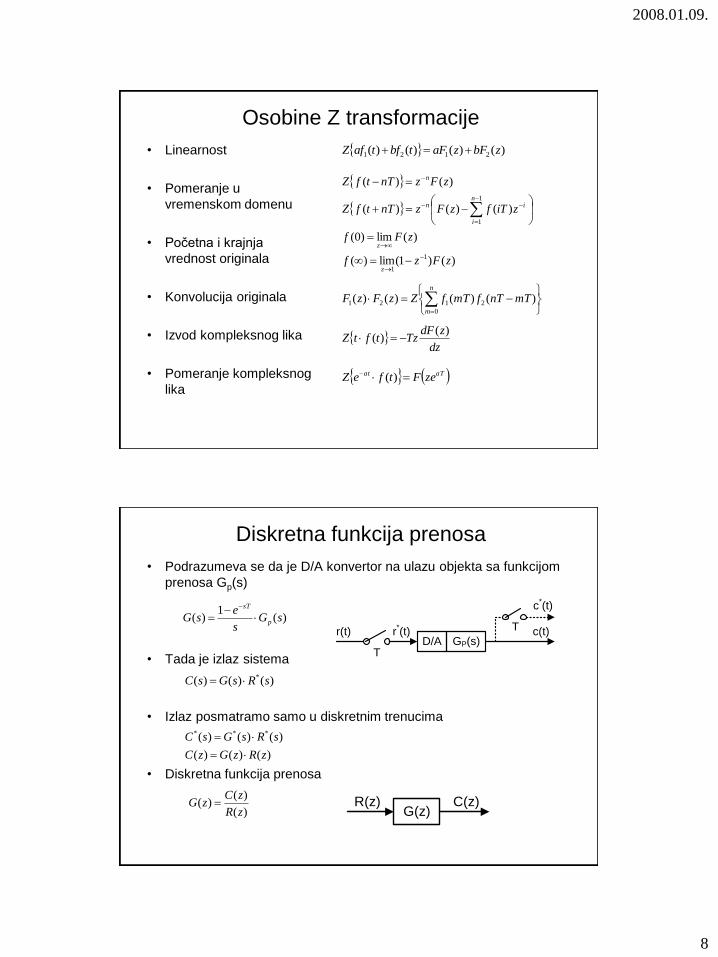
Osobine Z transformacije
• Linearnost
• Pomeranje u
vremenskom domenu
• Početna i krajnja
vrednost originala
• Konvolucija originala
• Izvod kompleksnog lika
• Pomeranje kompleksnog
lika
)()()()( 2121 zbFzaFtbftafZ
1
1
)()()(
)()(
n
i
in
n
ziTfzFznTtfZ
zFznTtfZ
)()1(lim)(
)(lim)0(
1
1zFzf
zFf
z
z
n
m
mTnTfmTfZzFzF0
2121 )()()()(
dz
zdFTztftZ
)()(
aTat zeFtfeZ )(
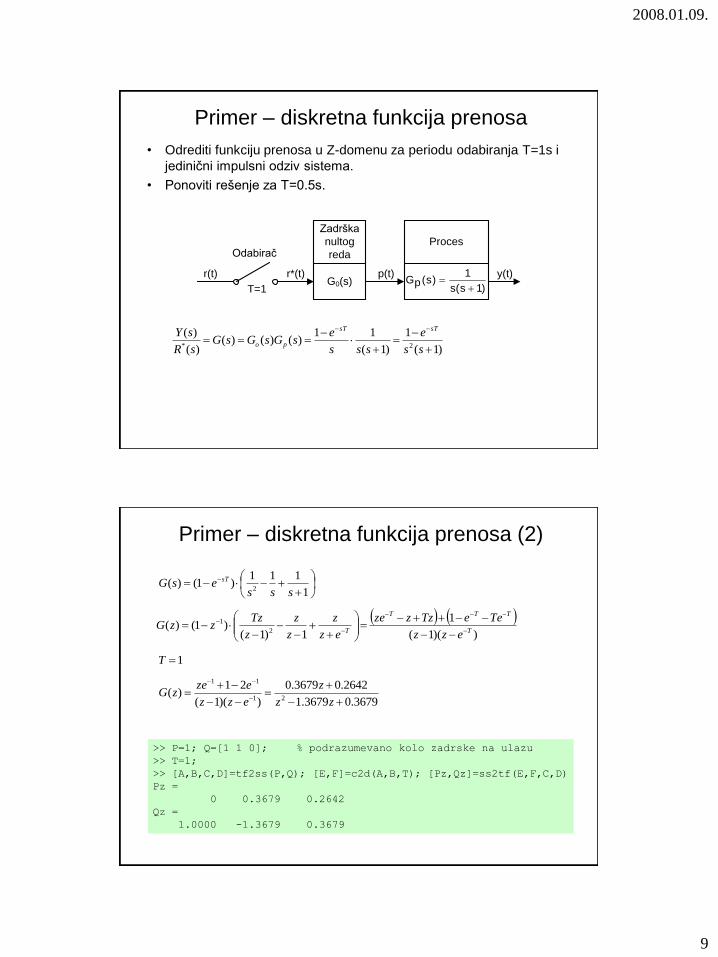
Diskretna funkcija prenosa
• Podrazumeva se da je D/A konvertor na ulazu objekta sa funkcijom
prenosa Gp(s)
• Tada je izlaz sistema
• Izlaz posmatramo samo u diskretnim trenucima
• Diskretna funkcija prenosa
r(t)GP(s)
r*(t)
D/Ac(t)
T
T
c*(t)
R(z)G(z)
C(z)
)(1
)( sGs
esG p
sT
)()()( * sRsGsC
)()()(
)()()( ***
zRzGzC
sRsGsC
)(
)()(
zR
zCzG
2008.01.09.
9
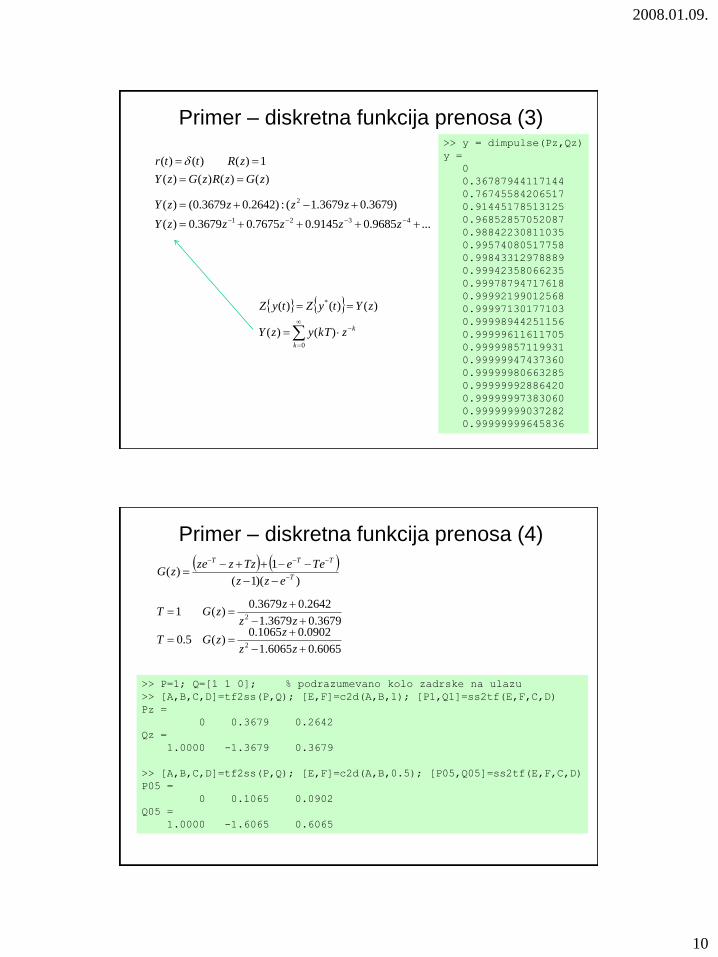
Primer – diskretna funkcija prenosa
• Odrediti funkciju prenosa u Z-domenu za periodu odabiranja T=1s i
jedinični impulsni odziv sistema.
• Ponoviti rešenje za T=0.5s.
Odabirač
r(t) r*(t)G0(s)
Zadrška
nultog
reda
p(t)
Proces
)1s(s
1)s(pG
y(t)
T=1
)1(
1
)1(
11)()()(
)(
)(2*
ss
e
sss
esGsGsG
sR
sY sTsT
po
1
111)1()(
2 sssesG sT
))(1(
1
1)1()1()(
2
1
T
TTT
T ezz
TeeTzzze
ez
z
z
z
z
TzzzG
1T
3679.03679.1
2642.03679.0
))(1(
21)(
21
11
zz
z
ezz
ezezG
>> P=1; Q=[1 1 0]; % podrazumevano kolo zadrske na ulazu
>> T=1;
>> [A,B,C,D]=tf2ss(P,Q); [E,F]=c2d(A,B,T); [Pz,Qz]=ss2tf(E,F,C,D)
Pz =
0 0.3679 0.2642
Qz =
1.0000 -1.3679 0.3679
Primer – diskretna funkcija prenosa (2)
2008.01.09.
10
...9685.09145.07675.03679.0)(
)3679.03679.1(:)2642.03679.0()(
4321
2
zzzzzY
zzzzY
)()()()(
1)()()(
zGzRzGzY
zRttr
0
*
)()(
)()()(
k
kzkTyzY
zYtyZtyZ
>> y = dimpulse(Pz,Qz)
y =
0
0.36787944117144
0.76745584206517
0.91445178513125
0.96852857052087
0.98842230811035
0.99574080517758
0.99843312978889
0.99942358066235
0.99978794717618
0.99992199012568
0.99997130177103
0.99998944251156
0.99999611611705
0.99999857119931
0.99999947437360
0.99999980663285
0.99999992886420
0.99999997383060
0.99999999037282
0.99999999645836
Primer – diskretna funkcija prenosa (3)
Primer – diskretna funkcija prenosa (4)
))(1(
1)(
T
TTT
ezz
TeeTzzzezG
6065.06065.1
0902.01065.0)(5.0
3679.03679.1
2642.03679.0)(1
2
2
zz
zzGT
zz
zzGT
>> P=1; Q=[1 1 0]; % podrazumevano kolo zadrske na ulazu
>> [A,B,C,D]=tf2ss(P,Q); [E,F]=c2d(A,B,1); [P1,Q1]=ss2tf(E,F,C,D)
Pz =
0 0.3679 0.2642
Qz =
1.0000 -1.3679 0.3679
>> [A,B,C,D]=tf2ss(P,Q); [E,F]=c2d(A,B,0.5); [P05,Q05]=ss2tf(E,F,C,D)
P05 =
0 0.1065 0.0902
Q05 =
1.0000 -1.6065 0.6065
2008.01.09.
11
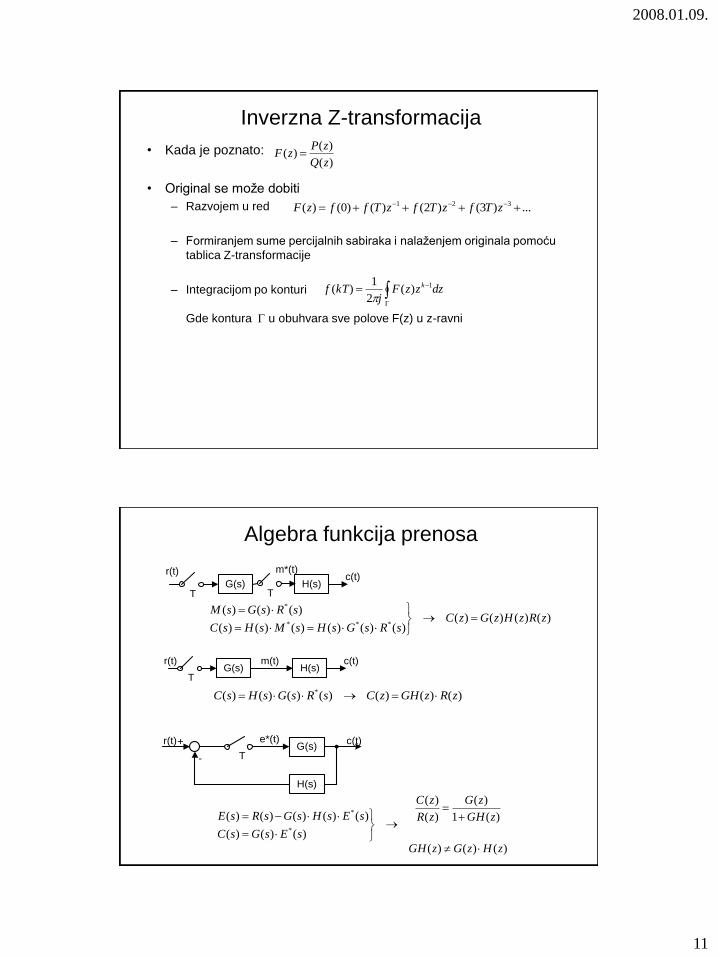
Inverzna Z-transformacija
• Kada je poznato:
• Original se može dobiti
– Razvojem u red
– Formiranjem sume percijalnih sabiraka i nalaženjem originala pomoću
tablica Z-transformacije
– Integracijom po konturi
Gde kontura u obuhvara sve polove F(z) u z-ravni
)(
)()(
zQ
zPzF
...)3()2()()0()( 321 zTfzTfzTffzF
dzzzFj
kTf k 1)(2
1)(
Algebra funkcija prenosa
G(s)
r(t)
TH(s)
c(t)m*(t)
T
G(s)r(t)
TH(s)
c(t)m(t)
e*(t)G(s)
c(t)r(t)+
- T
H(s)
)()()()()()()()()()(
)()()(***
*
zRzHzGzCsRsGsHsMsHsC
sRsGsM
)()()()()()()( * zRzGHzCsRsGsHsC
)()()(
)(1
)(
)(
)(
)()()(
)()()()()(*
*
zHzGzGH
zGH
zG
zR
zC
sEsGsC
sEsHsGsRsE
2008.01.09.
12
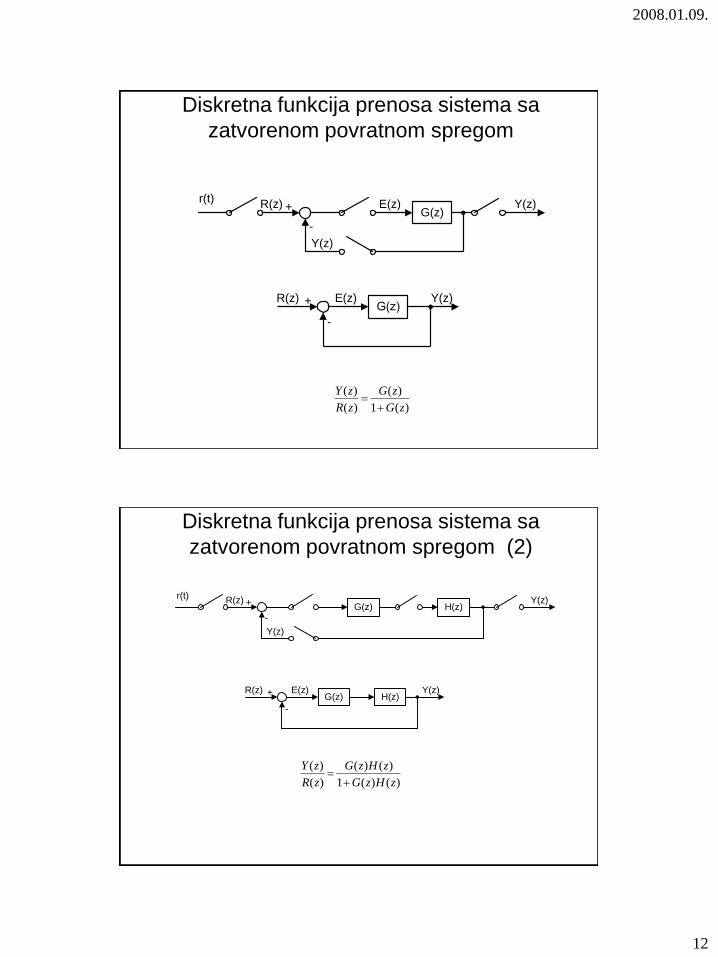
Diskretna funkcija prenosa sistema sa
zatvorenom povratnom spregom
E(z)G(z)
Y(z)r(t)
R(z) +
-
Y(z)
E(z)G(z)
Y(z)R(z) +
-
)(1
)(
)(
)(
zG
zG
zR
zY
G(z)Y(z)
r(t)R(z) +
-
H(z)
Y(z)
E(z)G(z)
R(z) +
-
H(z)Y(z)
)()(1
)()(
)(
)(
zHzG
zHzG
zR
zY
Diskretna funkcija prenosa sistema sa
zatvorenom povratnom spregom (2)
2008.01.09.
13
e(t) e*(t)G0(s)
Zadrška
nultog redaGp(s)
)1s(s
1
y(t)
T=1
r(t) +
-
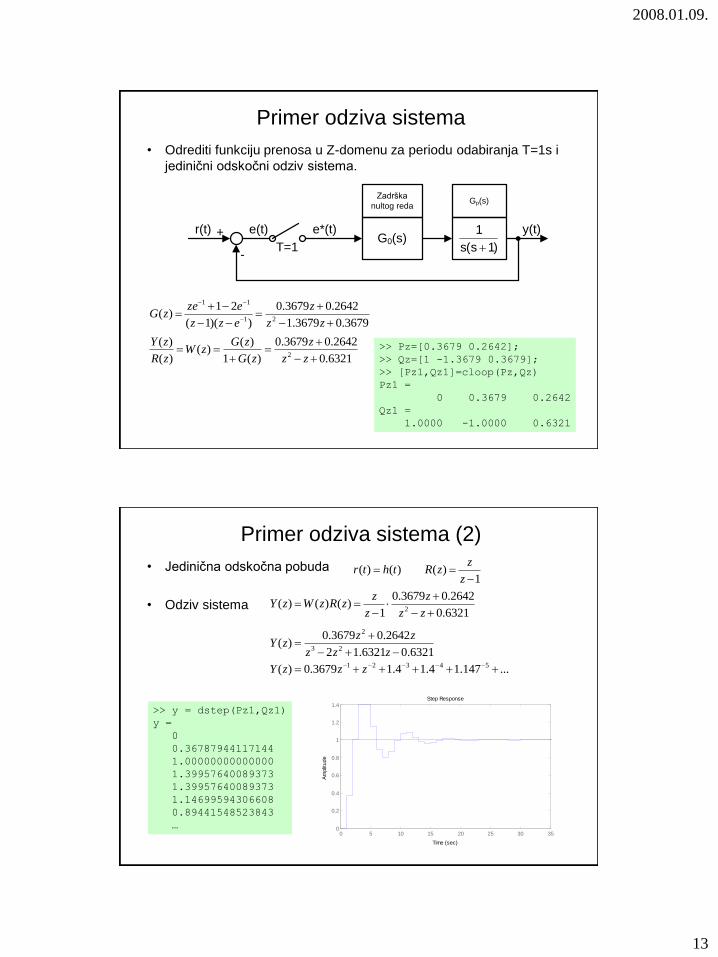
3679.03679.1
2642.03679.0
))(1(
21)(
21
11
zz
z
ezz
ezezG
6321.0
2642.03679.0
)(1
)()(
)(
)(2
zz
z
zG
zGzW
zR
zY >> Pz=[0.3679 0.2642];
>> Qz=[1 -1.3679 0.3679];
>> [Pz1,Qz1]=cloop(Pz,Qz)
Pz1 =
0 0.3679 0.2642
Qz1 =
1.0000 -1.0000 0.6321
• Odrediti funkciju prenosa u Z-domenu za periodu odabiranja T=1s i
jedinični odskočni odziv sistema.
Primer odziva sistema
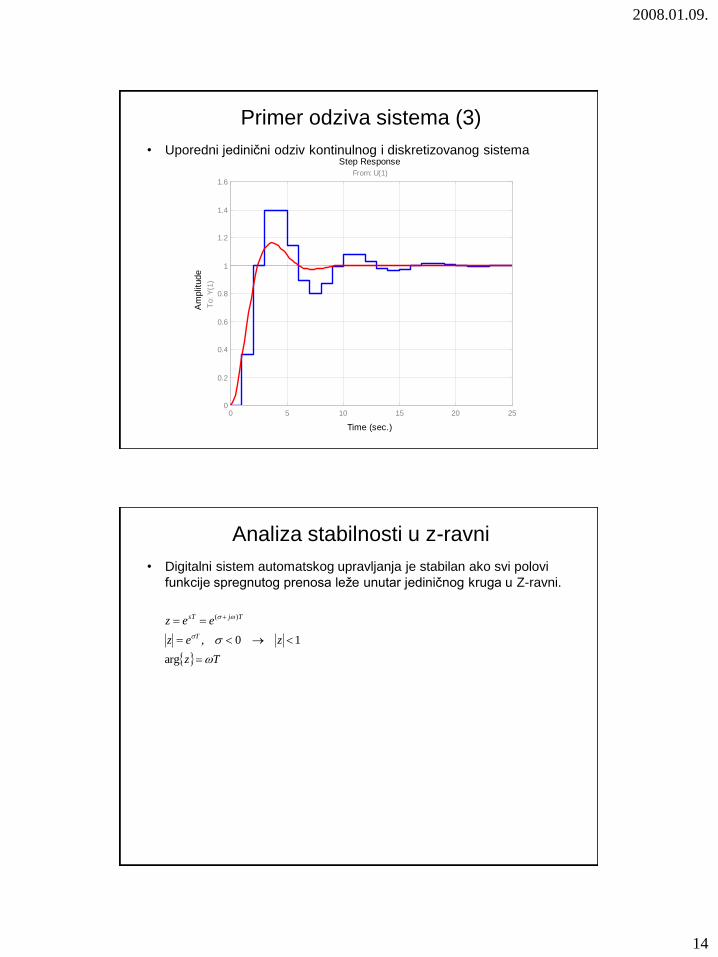
Primer odziva sistema (2)
• Jedinična odskočna pobuda
• Odziv sistema
1)()()(
z
zzRthtr
6321.0
2642.03679.0
1)()()(
2
zz
z
z
zzRzWzY
...147.14.14.13679.0)(
6321.06321.12
2642.03679.0)(
54321
23
2
zzzY
zzz
zzzY
>> y = dstep(Pz1,Qz1)
y =
0
0.36787944117144
1.00000000000000
1.39957640089373
1.39957640089373
1.14699594306608
0.89441548523843
…0 5 10 15 20 25 30 35
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
Am
plit
ude
2008.01.09.
14
Time (sec.)
Am
plit
ude
Step Response
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
From: U(1)
To: Y
(1)
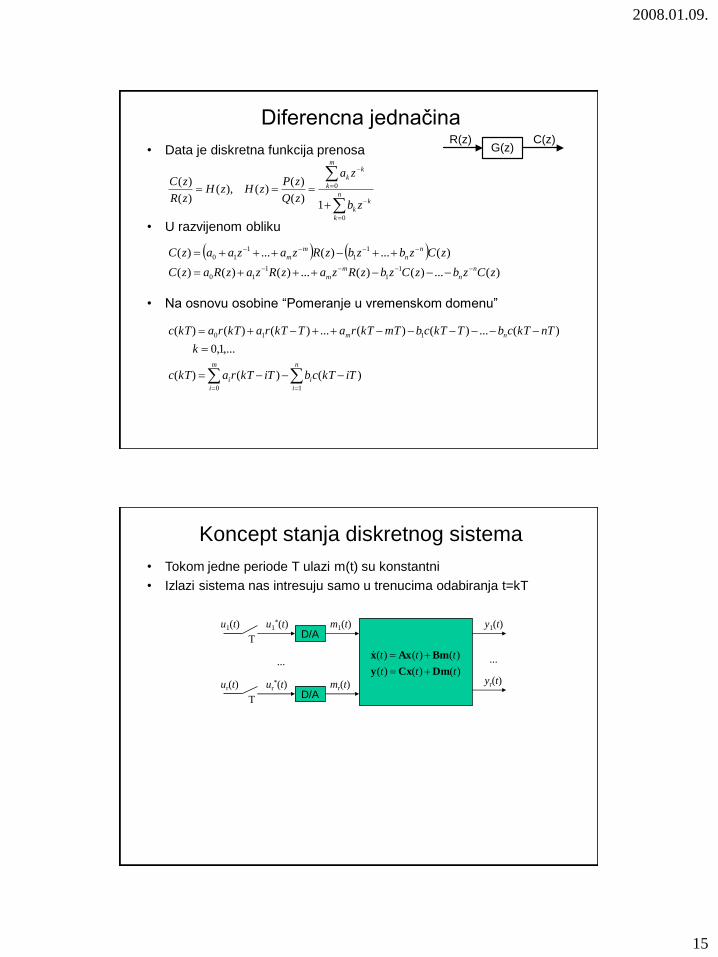
Primer odziva sistema (3)
• Uporedni jedinični odziv kontinulnog i diskretizovanog sistema
Analiza stabilnosti u z-ravni
• Digitalni sistem automatskog upravljanja je stabilan ako svi polovi
funkcije spregnutog prenosa leže unutar jediničnog kruga u Z-ravni.
Tz
zez
eez
T
TjsT
arg
10,
)(
2008.01.09.
15
Diferencna jednačina
• Data je diskretna funkcija prenosa
• U razvijenom obliku
• Na osnovu osobine “Pomeranje u vremenskom domenu”
n
k
k
k
m
k
k
k
zb
za
zQ
zPzHzH
zR
zC
0
0
1)(
)()(),(
)(
)(
)(...)()(...)()()(
)(...)(...)(
1
1
1
10
1
1
1
10
zCzbzCzbzRzazRzazRazC
zCzbzbzRzazaazC
n
n
m
m
n
n
m
m
R(z)G(z)
C(z)
n
i
i
m
i
i
nm
iTkTcbiTkTrakTc
k
nTkTcbTkTcbmTkTraTkTrakTrakTc
10
110
)()()(
,...1,0
)(...)()(...)()()(
Koncept stanja diskretnog sistema
• Tokom jedne periode T ulazi m(t) su konstantni
• Izlazi sistema nas intresuju samo u trenucima odabiranja t=kT
D/A
D/A
)()()(
)()()(
ttt
ttt
DmCxy
BmAxx
m1(t)
mr(t)
u1(t) u1*(t)
...
T
y1(t)
ur(t) ur*(t)
T
yr(t)
...
2008.01.09.
16
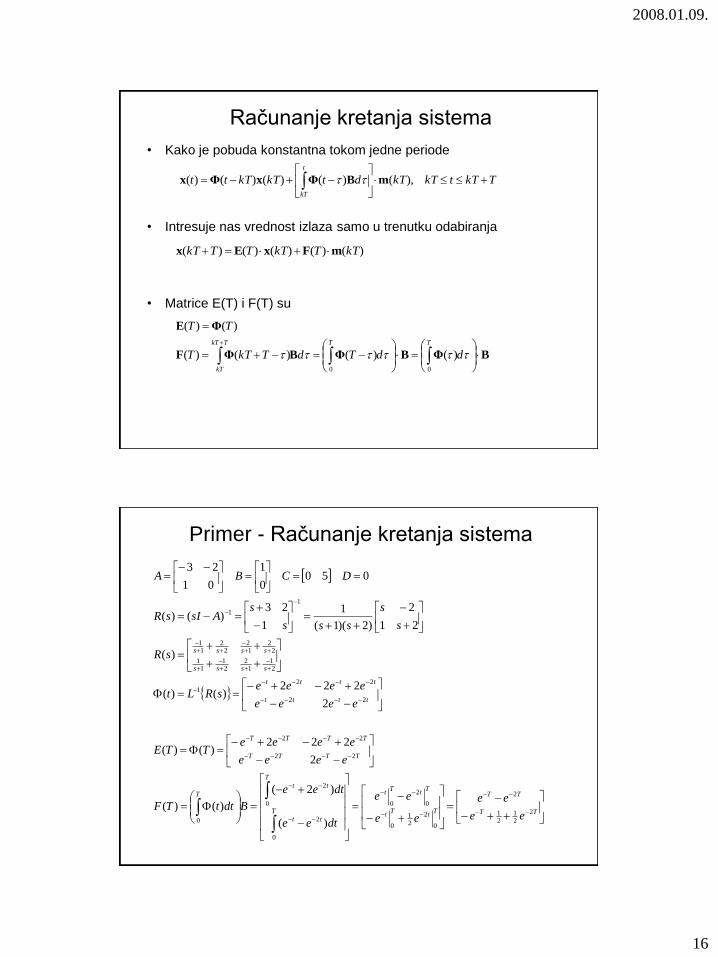
Računanje kretanja sistema
• Kako je pobuda konstantna tokom jedne periode
• Intresuje nas vrednost izlaza samo u trenutku odabiranja
• Matrice E(T) i F(T) su
TkTtkTkTdtkTkTtt
t
kT
),()()()()( mBΦxΦx
)()()()()( kTTkTTTkT mFxEx
BΦBΦBΦF
ΦE
ddTdTkTT
TT
TTTkT
kT 00
)()()()(
)()(
Primer - Računanje kretanja sistema
tttt
tttt
ssss
ssss
eeee
eeeesRLt
sR
s
s
sss
sAsIsR
DCBA
22
22
1
21
12
21
11
22
12
22
11
1
1
2
222)()(
)(
21
2
)2)(1(
1
1
23)()(
0500
1
01
23
TT
TT
Tt
Tt
Tt
Tt
T
tt
T
tt
T
TTTT
TTTT
ee
ee
ee
ee
dtee
dtee
BdttTF
eeee
eeeeTTE
2
21
21
2
0
2
21
0
0
2
0
0
2
0
2
0
22
22
)(
)2(
)()(
2
222)()(
2008.01.09.
17
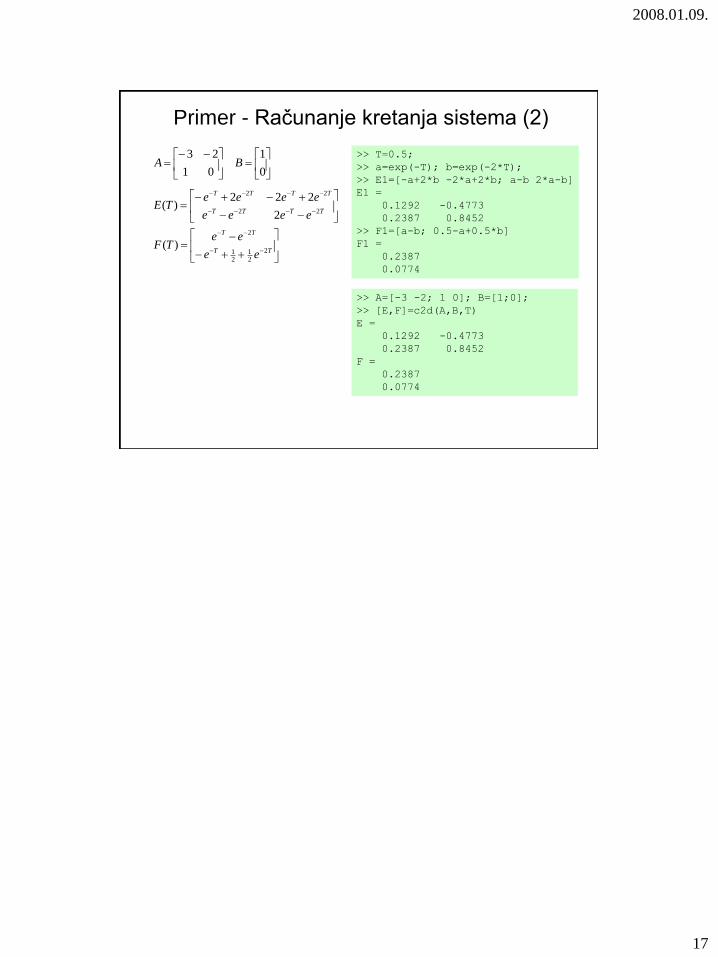
Primer - Računanje kretanja sistema (2)
0
1
01
23BA
TT
TT
TTTT
TTTT
ee
eeTF
eeee
eeeeTE
2
21
21
2
22
22
)(
2
222)(
>> A=[-3 -2; 1 0]; B=[1;0];
>> [E,F]=c2d(A,B,T)
E =
0.1292 -0.4773
0.2387 0.8452
F =
0.2387
0.0774
>> T=0.5;
>> a=exp(-T); b=exp(-2*T);
>> E1=[-a+2*b -2*a+2*b; a-b 2*a-b]
E1 =
0.1292 -0.4773
0.2387 0.8452
>> F1=[a-b; 0.5-a+0.5*b]
F1 =
0.2387
0.0774