Embed Size (px)
Citation preview

3100
4676
.02
ModiconBiblioteca de bloques Ladder LogicManual del usuarioVolumen 1840 USE 101 03
4/2006

ii

Tabla de materias
Información de seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . .xxvii
Acerca de este libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xxix
Parte I Información general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Capítulo 1 Descripción general de Ladder Logic. . . . . . . . . . . . . . . . . . . . .3Segmentos y redes en Ladder Logic. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Cómo resuelve Ladder Logic un PLC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Instrucciones y elementos Ladder Logic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Capítulo 2 Asignación de memoria en un UC . . . . . . . . . . . . . . . . . . . . . .15Memoria de usuario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Valores de la memoria de señal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Estructura de la memoria de señal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20La tabla de configuración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22Tabla de asignación E/S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Capítulo 3 Códigos operacionales de Ladder Logic . . . . . . . . . . . . . . . . .29Traducción de elementos Ladder Logic a la base de datos de la memoria de sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30Traducción de instrucciones DX a la base de datos de la memoria de sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Código operacional predeterminado para las instrucciones cargables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Capítulo 4 Instrucciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39
iii
Capítulo 5 Grupos de instrucciones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41ASCII Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Instrucciones del grupo Counters y Timers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44Instrucciones del grupo Fast I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45Loadable DX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46Instrucciones del grupo Math. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47Instrucciones del grupo Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49Miscellaneous . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50Instrucciones del grupo Move . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51Skips/Specials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52Instrucciones del grupo Special . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Coils, Contacts e Interconnects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Capítulo 6 Redes de ecuación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55Estructura de la red de ecuación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56Ecuaciones matemáticas en redes de ecuación . . . . . . . . . . . . . . . . . . . . . . . . . 60Operaciones matemáticas en redes de ecuación . . . . . . . . . . . . . . . . . . . . . . . . 64Funciones matemáticas en redes de ecuación . . . . . . . . . . . . . . . . . . . . . . . . . . 69Conversiones de datos en una red de ecuación . . . . . . . . . . . . . . . . . . . . . . . . . 71Diferencias de redondeo en UC sin un coprocesador matemático . . . . . . . . . . . 73Rendimiento de referencia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Capítulo 7 Control de regulación de bucle cerrado/Valores analógicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75Control de regulación de bucle cerrado/Valores analógicos . . . . . . . . . . . . . . . . 76Subfunciones de PCFL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77Ejemplo de PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81Ejemplo de control de nivel con PID2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Capítulo 8 Mensajes formateados para operaciones ASCII READ/WRIT 89Mensajes formateados para operaciones ASCII READ/WRIT . . . . . . . . . . . . . . 90Especificaciones de formato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91Consideraciones especiales de instalación para formato de señales de control/vigilancia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Capítulo 9 Coils, Contacts e Interconnects . . . . . . . . . . . . . . . . . . . . . . . . 97Coils . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98Contacts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100Interconnects (Shorts) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Capítulo 10 Utilización de interrupt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Capítulo 11 Utilización de subrutinas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
iv
Capítulo 12 Instalación de instrucciones cargables DX . . . . . . . . . . . . . .107
Parte II Descripción de instrucciones (A a D). . . . . . . . . . . . . . 109
Capítulo 13 1X3X - Simulación de entrada . . . . . . . . . . . . . . . . . . . . . . . . .111Descripción breve: 1X3X - Simulación de entrada . . . . . . . . . . . . . . . . . . . . . . 112Representación: 1X3X - Simulación de entrada . . . . . . . . . . . . . . . . . . . . . . . . 113
Capítulo 14 AD16: Añadir 16 Bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .115Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116Representación: AD16 - adición de 16 bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Capítulo 15 ADD: Adición. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .119Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120Representación: ADD - Adición de precisión simple. . . . . . . . . . . . . . . . . . . . . 121
Capítulo 16 AND: AND lógico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .123Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124Representación: AND - And lógico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Capítulo 17 BCD: Código binario a binario . . . . . . . . . . . . . . . . . . . . . . . .129Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130Representación: BCD - Conversión de valor decimal codificado en binario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Capítulo 18 BLKM: Mover bloque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .133Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134Representación: BLKM - Mover bloque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
Capítulo 19 BLKT: Bloque a tabla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .137Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138Representación: BLKT - Mover bloque a tabla . . . . . . . . . . . . . . . . . . . . . . . . . 139Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Capítulo 20 BMDI: Mover bloque con interrupts bloqueados. . . . . . . . . .141Descripción breve: BMDI - Mover bloque con interrupts bloqueados . . . . . . . . 142Representación: BMDI - Mover bloque con interrupts bloqueados. . . . . . . . . . 143
Capítulo 21 BROT: Rotación de bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .145Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146Representación: BROT - Rotación de bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
v

Capítulo 22 CALL: Activación de función DX inmediata o retardada . . . 151Descripción breve: CALL - Activación de función DX inmediata o retardada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152Representación: CALL - Activar función DX inmediata . . . . . . . . . . . . . . . . . . . 153Representación: CALL - Activar función DX retardada . . . . . . . . . . . . . . . . . . . 156
Capítulo 23 CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB . . . . . . . . . . . . . . . . . . . . . . . . . . 159Descripción breve: CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB . . . . . . . . . . . . . . . . . . . . . . . . . . 160Representación: CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB . . . . . . . . . . . . . . . . . . . . . . . . . . 161Descripción de parámetros: CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB . . . . . . . . . . . . . . . . . 163
Capítulo 24 CHS: Configuración de Hot standby . . . . . . . . . . . . . . . . . . . 167Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168Representación: CHS - Configuración de Hot Standby . . . . . . . . . . . . . . . . . . . 169Descripción detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Capítulo 25 CKSM: Suma de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176Representación: CKSM - Suma de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
Capítulo 26 CMPR: Comparar registro. . . . . . . . . . . . . . . . . . . . . . . . . . . . 181Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182Representación: CMPR - Comparación lógica . . . . . . . . . . . . . . . . . . . . . . . . . 183Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
Capítulo 27 Coils . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187Descripción breve: Bobinas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188Directrices generales de uso: Coils . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
Capítulo 28 COMM - Función de comunicaciones ASCII . . . . . . . . . . . . . 191Descripción breve: COMM - Bloque de comunicaciones ASCII . . . . . . . . . . . . 192Representación: COMM - Función de comunicaciones ASCII . . . . . . . . . . . . . 193
Capítulo 29 COMP: Complementar una matriz . . . . . . . . . . . . . . . . . . . . . 195Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196Representación: COMP - Complemento lógico . . . . . . . . . . . . . . . . . . . . . . . . . 197Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
Capítulo 30 Contacts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201Descripción breve: contactos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202Representación: Contacts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
vi

Capítulo 31 CONV - Convertir datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .205Descripción breve: CONV - Convertir datos . . . . . . . . . . . . . . . . . . . . . . . . . . . 206Representación: CONV - Convertir datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
Capítulo 32 CTIF - Contador, temporizador, función de interrupt . . . . . .209Descripción breve: CTIF - Contador, temporizador y función de interrupt . . . . 210Representación: CTIF - Contador, temporizador, función de interrupt . . . . . . . 211Descripción de parámetros: CTIF - Tabla de utilización de registros (asiento superior) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
Capítulo 33 DCTR: Contador regresivo . . . . . . . . . . . . . . . . . . . . . . . . . . .217Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218Representación: DCTR - Contador regresivo . . . . . . . . . . . . . . . . . . . . . . . . . . 219
Capítulo 34 DIOH: Estado funcional de E/S distribuidas . . . . . . . . . . . . .221Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222Representación: DIOH - Estado funcional de E/S distribuidas . . . . . . . . . . . . . 223Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
Capítulo 35 DISA - Control binario bloqueado . . . . . . . . . . . . . . . . . . . . . .227Descripción breve: DISA - Control binario bloqueado. . . . . . . . . . . . . . . . . . . . 228Representación: DISA - Control binario bloqueado . . . . . . . . . . . . . . . . . . . . . 229
Capítulo 36 DIV: División . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .231Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232Representación: DIV - División de precisión simple . . . . . . . . . . . . . . . . . . . . . 233Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
Capítulo 37 DLOG: Captación automática de datos de medidas para el apoyo de lectura/escritura PCMCIA . . . . . . . . . . . . . . . . . . . .237Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238Representación: DLOG. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241Tratamiento de errores de ejecución. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
Capítulo 38 DMTH - Matemática de doble precisión . . . . . . . . . . . . . . . . .245Descripción breve: DMTH - Matemática de doble precisión - Adición, substracción, multiplicación y división . . . . . . . . . . . . . . . . . . . . . . . . . 246Representación: DMTH - Matemática de doble precisión - Adición, substracción, multiplicación y división . . . . . . . . . . . . . . . . . . . . . . . . . 247
Capítulo 39 DRUM: Secuenciador de tambor. . . . . . . . . . . . . . . . . . . . . . .255Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256Representación: DRUM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
vii

Capítulo 40 DV16: División de 16 bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262Representación: DV16 - División de 16-bits . . . . . . . . . . . . . . . . . . . . . . . . . . . 263Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
Parte III Descripción de instrucciones (E). . . . . . . . . . . . . . . . . .267
Capítulo 41 EARS - Sistema de registro de alarmas de eventos. . . . . . . 269Descripción breve: EARS - Sistema de registro de alarmas de eventos. . . . . . 270Representación: EARS - Sistema de registro de alarmas de eventos . . . . . . . 271Descripción de parámetros: EARS - Sistema de registro de alarmas de eventos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
Capítulo 42 EMTH: Matemática extendida . . . . . . . . . . . . . . . . . . . . . . . . . 279Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280Representación: EMTH - Funciones de matemática extendida. . . . . . . . . . . . . 281Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283Funciones de EMTH con coma flotante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
Capítulo 43 EMTH-ADDDP: Adición de doble precisión. . . . . . . . . . . . . . 287Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288Representación: EMTH - ADDDP - Matemática de doble precisión - Adición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291
Capítulo 44 EMTH-ADDFP: Adición de coma flotante . . . . . . . . . . . . . . . 293Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294Representación: EMTH - ADDFP - Matemática de coma flotante - Adición . . . 295Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 297
Capítulo 45 EMTH-ADDIF: Adición de entero + coma flotante. . . . . . . . . 299Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 300Representación: EMTH - ADDIF - Adición de entero + coma flotante. . . . . . . . 301Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
Capítulo 46 EMTH-ANLOG: Algoritmo de base 10 . . . . . . . . . . . . . . . . . . 305Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 306Representación: EMTH - ANLOG - Algoritmo de base 10 entero . . . . . . . . . . . 307Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
Capítulo 47 EMTH-ARCOS: Arcocoseno de coma flotante de un ángulo (en radianes) . . . . . . . . . . . . . . . . . . . . . . . . . . . 311Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312Representación: EMTH - ARCOS - Matemática de coma flotante - Arcocoseno de un ángulo (en radianes) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315
viii

Capítulo 48 EMTH-ARSIN: Arcoseno de coma flotante de un ángulo (en radianes) . . . . . . . . . . . . . . . . . . . . . . . . . . .317Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 318Representación: EMTH - ARSIN - Arcoseno de un ángulo (en radianes) . . . . 319Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321
Capítulo 49 EMTH-ARTAN: Arcotangente de coma flotante de un ángulo (en radianes) . . . . . . . . . . . . . . . . . . . . . . . . . . .323Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324Representación: Matemática de coma flotante - Arcotangente de un ángulo (en radianes) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327
Capítulo 50 EMTH-CHSIN: cambio de signo de un número de coma flotante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .329Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 330Representación: EMTH - CHSIN - Cambio de signo de un número de coma flotante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 331Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333
Capítulo 51 EMTH-CMPFP: comparación de coma flotante . . . . . . . . . . .335Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336Representación: EMTH - CMFPF - Comparación de matemática de coma flotante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 337Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339
Capítulo 52 EMTH-CMPIF: comparación de entero y coma flotante . . . .341Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342Representación: EMTH - CMFPF - Matemática de coma flotante - Comparación entero/coma flotante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
Capítulo 53 EMTH-CNVDR: conversión de coma flotante de grados a radianes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .347Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 348Representación: EMTH - CNVDR - Conversión de grados a radianes. . . . . . . 349Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351
Capítulo 54 EMTH-CNVFI: Conversión de coma flotante a entero . . . . . .353Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354Representación: EMTH - CNVFI - Conversión de coma flotante a entero . . . . 355Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 357Tratamiento de errores de ejecución. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 358
ix

Capítulo 55 EMTH-CNVIF: conversión de entero a coma flotante. . . . . . 359Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 360Representación: EMTH - CNVIF - Conversión de entero a coma flotante . . . . 361Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363Tratamiento de errores de ejecución . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364
Capítulo 56 EMTH-CNVRD: conversión de coma flotante de radianes a grados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 366Representación: EMTH - CNVRD - Conversión de grados a radianes . . . . . . . 367Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 369
Capítulo 57 EMTH-COS: Coseno de coma flotante de un ángulo (en radianes) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 371Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372Representación: EMTH - COS - Coseno de un ángulo (en radianes) . . . . . . . . 373Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375
Capítulo 58 EMTH-DIVDP: división de doble precisión . . . . . . . . . . . . . . 377Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 378Representación: EMTH - DIVDP - Matemática de doble precisión - División . . 379Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 381Tratamiento de errores de ejecución . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382
Capítulo 59 EMTH-DIVFI: coma flotante dividido por entero . . . . . . . . . . 383Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384Representación: EMTH - DIVFI - Coma flotante dividido por entero . . . . . . . . . 385Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 387
Capítulo 60 EMTH-DIVFP: División de coma flotante . . . . . . . . . . . . . . . . 389Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 390Representación: EMTH - DIVFP - División de coma flotante . . . . . . . . . . . . . . 391Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393
Capítulo 61 EMTH-DIVIF: entero dividido por coma flotante . . . . . . . . . 395Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 396Representación: EMTH - DIVIF - Entero dividido por coma flotante . . . . . . . . . 397Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 399
Capítulo 62 EMTH-ERLOG: protocolarización de errores de coma flotante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 401Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402Representación: EMTH - ERLOG - Matemática de coma flotante - Protocolarización de errores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 405
x
Capítulo 63 EMTH-EXP: Función exponencial de coma flotante . . . . . . .407Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 408Representación: EMTH - EXP - Matemática de coma flotante - Función exponencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 409Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 411
Capítulo 64 EMTH-LNFP: logaritmo natural de coma flotante . . . . . . . . .413Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414Representación: EMTH - LNFP - Logaritmo natural . . . . . . . . . . . . . . . . . . . . . 415Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 417
Capítulo 65 EMTH-LOG: logaritmo de base 10. . . . . . . . . . . . . . . . . . . . . .419Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 420Representación: EMTH - LOG - Matemática de números enteros - Logaritmo de base 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 421Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423
Capítulo 66 EMTH-LOGFP: logaritmo común de coma flotante . . . . . . . .425Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426Representación: EMTH - LOGFP - Logaritmo común. . . . . . . . . . . . . . . . . . . . 427Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 429
Capítulo 67 EMTH-MULDP: multiplicación de doble precisión . . . . . . . .431Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432Representación: EMTH - MULDP - Matemática de doble precisión - Multiplicación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435
Capítulo 68 EMTH-MULFP: Multiplicación de coma flotante . . . . . . . . . .437Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 438Representación: EMTH - MULFP - Coma flotante - Multiplicación . . . . . . . . . . 439Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 441
Capítulo 69 EMTH-MULIF: Multiplicación de entero x coma flotante. . . .443Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444Representación: EMTH - MULIF - Entero multiplicado por coma flotante . . . . 445Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 447
Capítulo 70 EMTH-PI: Cargar el valor de coma flotante de "Pi" . . . . . . . .449Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 450Representación: EMTH - PI - Matemática de coma flotante - Cargar el valor de coma flotante de "Pi" . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 451Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453
xi

Capítulo 71 EMTH-POW: Elevar un número de coma flotante a una potencia entera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 456Representación: EMTH - POW - Elevar un número de coma flotante a una potencia entera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 457Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 459
Capítulo 72 EMTH-SINE: Seno de coma flotante de un ángulo (en radianes) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 461Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 462Representación: EMTH - SINE - Matemática de coma flotante - Seno de un ángulo (en radianes). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 463Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 465
Capítulo 73 EMTH-SQRFP: Raíz cuadrada de coma flotante . . . . . . . . . . 467Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 468Representación: EMTH - SQRFP - Raíz cuadrada . . . . . . . . . . . . . . . . . . . . . . 469Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 471
Capítulo 74 EMTH-SQRT: Raíz cuadrada de coma flotante . . . . . . . . . . . 473Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474Representación: EMTH - SQRT - Raíz cuadrada . . . . . . . . . . . . . . . . . . . . . . . 475Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 477
Capítulo 75 EMTH-SQRTP: Raíz cuadrada de proceso . . . . . . . . . . . . . . 479Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 480Representación: EMTH - SQRTP - Matemática de doble precisión - Raíz cuadrada de proceso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 481Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 483Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484
Capítulo 76 EMTH-SUBDP: Substracción de doble precisión . . . . . . . . . 485Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486Representación: EMTH - SUBDP - Matemática de doble precisión - Substracción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 487Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 489
Capítulo 77 EMTH-SUBFI: substracción de coma flotante menos entero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 491Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 492Representación: EMTH - SUBFI - Coma flotante menos entero . . . . . . . . . . . . 493Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 495
xii

Capítulo 78 EMTH-SUBFP: Substracción de coma flotante . . . . . . . . . . .497Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 498Representación: EMTH - SUBFP - Coma flotante - Substracción . . . . . . . . . . 499Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 501
Capítulo 79 EMTH-SUBIF: substracción de entero menos coma flotante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .503Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504Representación: EMTH - SUBIF - Entero menos coma flotante . . . . . . . . . . . . 505Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 507
Capítulo 80 EMTH-TAN: tangente de coma flotante de un ángulo (en radianes) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .509Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 510Representación: EMTH - TAN - Tangente de un ángulo (en radianes) . . . . . . 511Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 513
Capítulo 81 ESI: apoyo del módulo ESI . . . . . . . . . . . . . . . . . . . . . . . . . . .515Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516Representación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 517Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 518READ ASCII Message (subfunción 1). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 521WRITE ASCII Message (subfunción 2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 526GET DATA (subfunción 3). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 527PUT DATA (Subfunción 4) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 529ABORT (entrada intermedia activada) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534Errores de ejecución . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 535
Capítulo 82 EUCA: alarmas y conversión de unidades físicas . . . . . . . .537Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 538Representación: EUCA - Unidad física y alarma . . . . . . . . . . . . . . . . . . . . . . . 539Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 541Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543
Parte IV Descripción de instrucciones (F a N) . . . . . . . . . . . . . . 549
Capítulo 83 FIN: First in . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .551Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 552Representación: FIN - First in . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554
Capítulo 84 FOUT: First out . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .555Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556Representación: FOUT - First Out . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 557Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 559
xiii

Capítulo 85 FTOI: Coma flotante a entero . . . . . . . . . . . . . . . . . . . . . . . . . 561Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562Representación: FTOI - Conversión de coma flotante a entero . . . . . . . . . . . . 563
Capítulo 86 GD92 - Bloque de función de flujo de gas. . . . . . . . . . . . . . . 565Descripción breve: GD92 - Bloque de función de flujo de gas . . . . . . . . . . . . . 566Representación: GD92 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . 568Descripción de parámetros - Entradas: GD92 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 570Descripción de parámetros - Salidas: GD92 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 577Descripción de parámetros - Salidas opcionales: GD92 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 578
Capítulo 87 GFNX AGA nº 3 ‘85 y NX19 ‘68 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . 579Descripción breve: GFNX - Bloque de función de flujo de gas . . . . . . . . . . . . . 580Representación: GFNX - Bloque de función de flujo de gas . . . . . . . . . . . . . . . 581Descripción de parámetros - Entradas: GFNX - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584Descripción de parámetros - Salidas: GFNX - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 591Descripción de parámetros - Salidas opcionales: GFNX - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 592
Capítulo 88 Bloque de función de flujo de gas GG92 AGA nº 3 1992 con método en bruto . . . . . . . . . . . . . . . . . . . 593Descripción breve: GG92 - Bloque de función de flujo de gas . . . . . . . . . . . . . 594Representación: GG92 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . 595Descripción de parámetros - Entradas: GG92 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 598Descripción de parámetros - Salidas: GG92 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604Descripción de parámetros - Salidas opcionales: GG92 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605
Capítulo 89 GM92 AGA nº 3 y nº 8 1992 - Bloque de función de flujo de gas (método detallado) . . . . 607Descripción breve: GM92 - Bloque de función de flujo de gas . . . . . . . . . . . . . 608Representación: GM92 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . 609Descripción de parámetros - Entradas: GM92 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 611Descripción de parámetros - Salidas: GM92 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 618Descripción de parámetros - Salidas opcionales: GM92 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 619
xiv

Capítulo 90 G392 AGA nº3 1992 - Bloque de función de flujo de gas . . .621Descripción breve: G392 - Bloque de función de flujo de gas . . . . . . . . . . . . . 622Representación: G392 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . 623Descripción de parámetros - Entradas: G392 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 625Descripción de parámetros - Salidas: G392 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 630Descripción de parámetros - Salidas opcionales: G392 - Bloque de función de flujo de gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 631
Capítulo 91 HLTH: Matrices de historia y estado. . . . . . . . . . . . . . . . . . . .633Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634Representación: HLTH - Estado de funcionamiento del sistema . . . . . . . . . . . 635Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 637Asiento superior de la descripción de parámetros (matriz de historia) . . . . . . . 639Asiento intermedio de la descripción de parámetros (matriz de estado) . . . . . 644Asiento inferior de la descripción de parámetros (longitud) . . . . . . . . . . . . . . . 649
Capítulo 92 HSBY - Hot Standby . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .651Descripción breve: HSBY - Hot Standby. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 652Representación: HSBY - Hot Standby . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653Descripción de parámetros - Asiento superior: HSBY - Hot Standby . . . . . . . . 655Descripción de parámetros - Asiento intermedio: HSBY - Hot Standby . . . . . . 656
Capítulo 93 IBKR: Lectura indirecta de bloque . . . . . . . . . . . . . . . . . . . . .657Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 658Representación: IBKR - Lectura indirecta de bloque . . . . . . . . . . . . . . . . . . . . 659
Capítulo 94 IBKW: Escritura indirecta de bloque . . . . . . . . . . . . . . . . . . .661Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 662Representación: IBKW - Escritura indirecta de bloque . . . . . . . . . . . . . . . . . . . 663
Capítulo 95 ICMP: Comparación de entrada . . . . . . . . . . . . . . . . . . . . . . .665Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 666Representación: ICMP - Comparación de entrada . . . . . . . . . . . . . . . . . . . . . . 667Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 669Bloques DRUM/ICMP en cascada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 671
Capítulo 96 ID: bloquear interrupt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .673Descripción breve: ID - Bloquear interrupt . . . . . . . . . . . . . . . . . . . . . . . . . . . . 674Representación: ID - Bloquear interrupt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 675Descripción de parámetros: ID - Bloquear interrupt . . . . . . . . . . . . . . . . . . . . . 676
Capítulo 97 IE: habilitar interrupt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .677Descripción breve: IE - Habilitar interrupt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 678Representación: IE - Habilitar interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 679Descripción de parámetros: IE - Habilitar interrupt . . . . . . . . . . . . . . . . . . . . . . 680
xv
Capítulo 98 IMIO: E/S inmediatas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 681Descripción breve: IMIO - E/S inmediatas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 682Representación: IMIO - E/S inmediatas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 683Descripción de parámetros: IMIO - E/S inmediatas. . . . . . . . . . . . . . . . . . . . . . 685Tratamiento de errores de ejecución: IMIO - E/S inmediatas . . . . . . . . . . . . . . 687
Capítulo 99 IMOD: Instrucción de módulo de interrupt . . . . . . . . . . . . . . 689Descripción breve: IMOD - Módulo de interrupt. . . . . . . . . . . . . . . . . . . . . . . . . 690Representación: IMOD - Módulo de interrupt . . . . . . . . . . . . . . . . . . . . . . . . . . 691Descripción de parámetros: IMOD - Módulo de interrupt . . . . . . . . . . . . . . . . . 694
Capítulo 100 ITMR: temporizador de interrupt . . . . . . . . . . . . . . . . . . . . . . 699Descripción breve: ITMR - Interrupt de temporizador de intervalos . . . . . . . . . 700Representación: ITMR - Interrupción del temporizador de intervalo . . . . . . . . . 701Descripción de parámetros: ITMR - Interrupt de temporizador de intervalos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 703
Capítulo 101 ITOF: entero a coma flotante . . . . . . . . . . . . . . . . . . . . . . . . . 707Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 708Representación: ITOF - Conversión de entero a coma flotante . . . . . . . . . . . . 709
Capítulo 102 JSR: Saltar a una subrutina . . . . . . . . . . . . . . . . . . . . . . . . . . 711Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 712Representación: JSR - Saltar a una subrutina. . . . . . . . . . . . . . . . . . . . . . . . . . 713
Capítulo 103 LAB: Etiqueta para una subrutina . . . . . . . . . . . . . . . . . . . . . 715Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 716Representación: LAB - Etiqueta. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 717Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 718
Capítulo 104 LOAD: Cargar Flash. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 719Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 720Representación: LOAD - Cargar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 721Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 722
Capítulo 105 MAP 3: Transacción MAP . . . . . . . . . . . . . . . . . . . . . . . . . . . . 723Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 724Representación: MAP 3 - Transacción MAP . . . . . . . . . . . . . . . . . . . . . . . . . . . 725Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 726
Capítulo 106 MATH - Operaciones con enteros . . . . . . . . . . . . . . . . . . . . . 731Descripción breve: MATH - Operaciones conenteros: raíz cuadrada decimal, raíz cuadrada de proceso, logaritmo (base 10) y antilogaritmo (base 10). . . . . . . . . . . . . . . . . . . 732Representación: MATH - Operaciones con enteros: raíz cuadrada decimal, raíz cuadrada de proceso, logaritmo (base 10) y antilogaritmo (base 10) . . . . . . . . . . . . . . . . 733
xvi

Capítulo 107 MBIT: Modificar bit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .741Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 742Representación: MBIT - Modificación lógica de bits . . . . . . . . . . . . . . . . . . . . . 743Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 745
Capítulo 108 MBUS: Transacción MBUS . . . . . . . . . . . . . . . . . . . . . . . . . . .747Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 748Representación: MBUS - Transferencia Modbus II. . . . . . . . . . . . . . . . . . . . . . 749Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 751Función MBUS para obtener estadísticas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 753
Capítulo 109 MRTM: Módulo de transferencia multirregistro. . . . . . . . . . .757Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 758Representación: MRTM - Módulo de transferencia multirregistro. . . . . . . . . . . 759Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 761
Capítulo 110 MSPX (Seriplex) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .763Descripción breve: MSPX (Seriplex) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 764Representación: MSPX (Seriplex). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 765
Capítulo 111 MSTR: master . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .767Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 769Bloque de función 984LL MSTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 770Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 773Operación MSTR de escritura. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 777Operación MSTR de lectura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 779Operación MSTR de obtención de estadísticas locales . . . . . . . . . . . . . . . . . . 781Operación MSTR de borrado de estadísticas locales . . . . . . . . . . . . . . . . . . . . 783Operación MSTR de escritura de datos globales . . . . . . . . . . . . . . . . . . . . . . . 785Operación MSTR de lectura de datos globales. . . . . . . . . . . . . . . . . . . . . . . . . 786Operación MSTR de obtención de estadísticas remotas . . . . . . . . . . . . . . . . . 787Operación MSTR de borrado de estadísticas remotas . . . . . . . . . . . . . . . . . . . 789Operación MSTR de estado funcional de Peer Cop . . . . . . . . . . . . . . . . . . . . . 791Operación MSTR de reinicio de módulo opcional . . . . . . . . . . . . . . . . . . . . . . . 794Operación MSTR de lectura de CTE (tabla de extensión de configuración) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 796Operación MSTR de escritura en CTE (tabla de extensión de configuración) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 798Estadísticas de red Modbus Plus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 800Estadísticas Ethernet TCP/IP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 805Errores de ejecución . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 806Códigos de error Modbus Plus y Ethernet SY/MAX . . . . . . . . . . . . . . . . . . . . . 807Códigos de error específicos de SY/MAX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 809Códigos de error Ethernet TCP/IP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 811Códigos de error CTE para Ethernet SY/MAX y TCP/IP. . . . . . . . . . . . . . . . . . 814
xvii

Capítulo 112 MU16: Multiplicación de 16 bits . . . . . . . . . . . . . . . . . . . . . . . 815Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 816Representación: MU16 - Multiplicación de 16 bits. . . . . . . . . . . . . . . . . . . . . . . 817
Capítulo 113 MUL: Multiplicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 819Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 820Representación: MUL - Multiplicación de precisión . . . . . . . . . . . . . . . . . . . . . . 821Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 823
Capítulo 114 NBIT: Control de bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 825Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 826Representación: NBIT - Bit normal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 827
Capítulo 115 NCBT: Bit normal cerrado. . . . . . . . . . . . . . . . . . . . . . . . . . . . 829Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 830Representación: NCBT - Bit normal cerrado . . . . . . . . . . . . . . . . . . . . . . . . . . . 831
Capítulo 116 NOBT: Bit normal abierto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 833Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 834Representación: NOBT - Bit normal abierto . . . . . . . . . . . . . . . . . . . . . . . . . . . 835
Capítulo 117 NOL: Módulo opcional de red para Lonworks . . . . . . . . . . . 837Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 838Representación: NOL - Módulo opcional de red para Lonworks . . . . . . . . . . . . 839Descripción detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 841
Parte V Descripción de instrucciones (O a Q) . . . . . . . . . . . . . .843
Capítulo 118 OR: OR lógico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 845Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 846Representación: OR - Or lógico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 847Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 849
Capítulo 119 PCFL: Biblioteca de funciones de regulación de procesos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 851Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 852Representación: PCFL - Biblioteca de funciones de regulación de procesos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 853Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 854
Capítulo 120 PCFL-AIN: Entrada analógica . . . . . . . . . . . . . . . . . . . . . . . . . 859Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 860Representación: PCFL-AIN - Convertir entradas a unidades físicas escaladas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 861Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 862
xviii

Capítulo 121 PCFL-ALARM: Administrador central de alarmas. . . . . . . . .865Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 866Representación: PCFL-ALRM - Administrador central de alarmas para una entrada de valor real . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 867Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 868
Capítulo 122 PCFL-AOUT: Salida analógica. . . . . . . . . . . . . . . . . . . . . . . . .871Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 872Representación: PCFL-AOUT - Convertir salidas en valores comprendidos entre 0 y 4.095. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 873Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 874
Capítulo 123 PCFL-AVER: Cálculo del promedio de entradas ponderadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .875Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 876Representación: PCFL-AVER - Promedio de entradas ponderadas . . . . . . . . 877Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 878
Capítulo 124 PCFL-CALC: Cálculo de fórmula preestablecida . . . . . . . . .881Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 882Representación: PCFL-CALC - Cálculo de fórmula preestablecida . . . . . . . . . 883Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 884
Capítulo 125 PCFL-DELAY: Cola de espera de retardo. . . . . . . . . . . . . . . .887Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 888Representación: PCFL - DELY - Cola de espera de retardo . . . . . . . . . . . . . . 889Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 890
Capítulo 126 PCFL-EQN: Calculadora de ecuaciones formateadas . . . . .893Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 894Representación: PCFL - EQN - Calculadora de ecuaciones formateadas . . . . 895Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 896
Capítulo 127 PCFL-INTEG: Integrar entrada en un intervalo especificado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .899Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 900Representación: PCFL - INTG - Integrar entrada en un intervalo especificado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 901Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 902
Capítulo 128 PCFL-KPID: PID no interactiva de ISA expandida . . . . . . . . .903Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 904Representación: PCFL - KPID - Proporcional-integral-diferencial no interactiva de ISA expandida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 905Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 906
xix

Capítulo 129 PCFL-LIMIT: Limitador para la entrada de valor real . . . . . . 911Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 912Representación: PCFL - LIMIT - Limitador para la entrada de valor real . . . . . 913Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 914
Capítulo 130 PCFL-LIMV: Limitador de velocidad para cambios en la entrada de valor real . . . . . . . . . . . . . . . . . . . . 915Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 916Representación: PCFL - LIMV - Limitador de velocidad para cambios en la entrada de valor real. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 917Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 918
Capítulo 131 PCFL-LKUP: tabla de linearización por interpolación . . . . . 919Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 920Representación: PCFL - LKUP - Tabla de linearización por interpolación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 921Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 922
Capítulo 132 PCFL-LLAG: Filtro diferenciador o de retardo de primer orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 925Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 926Representación: PCFL-LLAG - Filtro diferenciador o de retardo de primer orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 927Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 928
Capítulo 133 PCFL-MODE: establecer la entrada en modo automático o manual . . . . . . . . . . . . . . . . . . . . . . . . . . 929Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 930Representación: PCFL-MODE - Establecer la entrada en modo automático o manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 931Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 932
Capítulo 134 PCFL-ONOFF: valores de activo/inactivo para banda muerta. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 933Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 934Representación: PCFL - ONOFF - Valores de activo/inactivo para banda muerta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 935Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 936
Capítulo 135 PCFL-PI: PI no interactivo de ISA. . . . . . . . . . . . . . . . . . . . . . 939Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 940Representación: PCFL - PI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 941Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 942
xx
Capítulo 136 PCFL-PID: Algoritmos PID . . . . . . . . . . . . . . . . . . . . . . . . . . . .945Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 946Representación: PCFL - PID - Algoritmos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 947Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 948
Capítulo 137 PCFL-RAMP: rampa para el valor de consigna con una tasa de crecimiento constante. . . . . . . . .951Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 952Representación: PCFL-RAMP - Rampa para el valor de consigna con una tasa de crecimiento constante . . . . . . . . . . . . . . . . 953Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 954
Capítulo 138 PCFL-RATE: Cálculo de la tasa diferencial durante un periodo específico . . . . . . . . . . . . . . . . . . . . . . . .957Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 958Representación: PCFL-RATE - Cálculo de la tasa diferencial durante un periodo específico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 959Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 960
Capítulo 139 PCFL-RATIO: Controlador de ratio para cuatro estaciones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .961Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 962Representación: PCFL-RATIO - Controlador de ratio para cuatro estaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 963Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 964
Capítulo 140 PCFL-RMPLN: Rampa logarítmica para valor de consigna. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .967Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 968Representación: PCFL-RMPLN - Rampa logarítmica para valor de consigna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 969Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 970
Capítulo 141 PCFL-SEL: Selección de entrada . . . . . . . . . . . . . . . . . . . . . .973Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 974Representación: PCFL-SEL - Selección de entrada superior/inferior/promedio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 975Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 976
Capítulo 142 PCFL-TOTAL: Totalizador para flujo dosificado . . . . . . . . . .979Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 980Representación: PCFL-TOTAL - Totalizador para flujo dosificado . . . . . . . . . . 981Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 982
xxi
Capítulo 143 PEER: Transacción PEER . . . . . . . . . . . . . . . . . . . . . . . . . . . . 985Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 986Representación: PEER - Transferencia idéntica Modbus II. . . . . . . . . . . . . . . . 987Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 989
Capítulo 144 PID2: Proporcional-integral-diferencial . . . . . . . . . . . . . . . . . 991Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 992Representación: PID2 - Proporcional/integral/diferencial . . . . . . . . . . . . . . . . . 993Descripción detallada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 995Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 998Errores de ejecución . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1003
Parte VI Descripción de instrucciones (R a Z) . . . . . . . . . . . . .1005
Capítulo 145 R --> T: registro a Tabla. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1007Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1008Representación: R → T - Movimiento de registro a tabla . . . . . . . . . . . . . . . . 1009Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1011
Capítulo 146 RBIT: puesta a cero de bit. . . . . . . . . . . . . . . . . . . . . . . . . . . 1013Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1014Representación: RBIT - Puesta a cero de bit . . . . . . . . . . . . . . . . . . . . . . . . . 1015
Capítulo 147 READ: lectura. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1017Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1018Representación: READ - Lectura de puerto ASCII . . . . . . . . . . . . . . . . . . . . . 1019Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1021
Capítulo 148 RET: Retorno desde una subrutina . . . . . . . . . . . . . . . . . . . 1023Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1024Representación: RET - Retorno a lógica administrada . . . . . . . . . . . . . . . . . . 1025
Capítulo 149 RTTI - Registro a tabla de entrada . . . . . . . . . . . . . . . . . . . . 1027Descripción breve: RTTI - Registro a tabla de entrada . . . . . . . . . . . . . . . . . . 1028Representación: RTTI - Registro a tabla de entrada . . . . . . . . . . . . . . . . . . . . 1029
Capítulo 150 RTTO - Registro a tabla de salida. . . . . . . . . . . . . . . . . . . . . 1031Descripción breve: RTTO - Registro a tabla de salida. . . . . . . . . . . . . . . . . . . 1032Representación: RTTO - Registro a tabla de salida . . . . . . . . . . . . . . . . . . . . 1033
Capítulo 151 RTU - Unidad terminal remota . . . . . . . . . . . . . . . . . . . . . . . 1035Descripción breve: RTU - Unidad terminal remota . . . . . . . . . . . . . . . . . . . . . 1036Representación: RTU - Unidad terminal remota . . . . . . . . . . . . . . . . . . . . . . . 1037
xxii

Capítulo 152 SAVE: Guardar Flash . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1041Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1042Representación: SAVE - Guardar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1043Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1045
Capítulo 153 SBIT: Establecer bit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1047Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1048Representación: SBIT - Establecer bit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1049
Capítulo 154 SCIF: Interfases de control secuencial. . . . . . . . . . . . . . . . .1051Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1052Representación: SCIF - Interfase de control secuencial . . . . . . . . . . . . . . . . . 1053Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1055
Capítulo 155 SENS: Sensado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1057Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1058Representación: SENS - Sensado de bit lógico . . . . . . . . . . . . . . . . . . . . . . . 1059Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1061
Capítulo 156 Shorts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1063Descripción breve: Shorts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1064Representación: conexiones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1065
Capítulo 157 SKP - Saltar redes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1067Descripción breve: SKP - Saltar redes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1068Representación: SKP - Saltar redes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1069
Capítulo 158 SRCH: Buscar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1071Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1072Representación: SRCH - Buscar. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1073Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1075
Capítulo 159 STAT: estado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1077Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1078Representación: STAT - estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1079Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1081Descripción de la tabla de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1082Estado del PLC: palabras 1 -11 de Quantum y Momemtum. . . . . . . . . . . . . . 1086Estado funcional de módulo de E/S: palabras 12 - 20 para Momentum. . . . . 1091Estado funcional de módulo de E/S: palabras 12 - 171 para Quantum . . . . . 1093Estado de comunicaciones: palabras 172 - 277 para Quantum . . . . . . . . . . . 1095Estado del PLC: palabras 1 - 11 para Compact TSX y Atrium . . . . . . . . . . . . 1101Estado funcional de módulo de E/S: palabras 12 -15 para Compact TSX . . . 1104Estado de funcionamiento global y estado de reintentos de comunicaciones: palabras 182 a 184 para Compact TSX . . . . . . . . . . . . . 1105
xxiii

Capítulo 160 SU16: Substracción de 16 bits . . . . . . . . . . . . . . . . . . . . . . . 1107Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1108Representación: SU16 - Substracción de 16 bits . . . . . . . . . . . . . . . . . . . . . . 1109
Capítulo 161 SUB: Substracción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1111Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1112Representación: SUB - Substracción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1113
Capítulo 162 SWAP - Permutación de bit VME . . . . . . . . . . . . . . . . . . . . . 1115Descripción breve: SWAP - Permutación de bit VME . . . . . . . . . . . . . . . . . . . 1116Representación: SWAP - Permutación de bit VME . . . . . . . . . . . . . . . . . . . . . 1117
Capítulo 163 TTR - Tabla a registro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1119Descripción breve: TTR - Tabla a registro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1120Representación: TTR - Tabla a registro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1121
Capítulo 164 T --> R Tabla a registro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1123Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1124Representación: T → R - Movimiento de tabla a registro . . . . . . . . . . . . . . . . 1125Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1127
Capítulo 165 T --> T: Tabla a tabla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1129Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1130Representación: T → T - Movimiento de tabla a tabla. . . . . . . . . . . . . . . . . . . 1131Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1133
Capítulo 166 T.01 - Temporizador: Temporizador de centésimas de segundo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1135Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1136Representación: T.01 - Temporizador de centésimas de segundo . . . . . . . . . 1137
Capítulo 167 T0.1 - Temporizador: Temporizador de décimas de segundo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1139Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1140Representación: T0.1 - Temporizador de décimas de segundo . . . . . . . . . . . 1141
Capítulo 168 T1.0 - Temporizador: Temporizador de segundos . . . . . . . 1143Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1144Representación: T1.0 - Temporizador de segundos . . . . . . . . . . . . . . . . . . . . 1145
Capítulo 169 T1MS - Temporizador: Temporizador de milisegundos . . . 1147Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1148Representación: T1MS - Temporizador de milisegundos . . . . . . . . . . . . . . . . 1149Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1151
xxiv

Capítulo 170 TBLK: Tabla a bloque. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1153Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1154Representación: TBLK - Movimiento de tabla a bloque . . . . . . . . . . . . . . . . . 1155Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1157
Capítulo 171 TEST: Verificación de 2 valores . . . . . . . . . . . . . . . . . . . . . .1159Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1160Representación: TEST - Verificación de 2 valores . . . . . . . . . . . . . . . . . . . . . 1161
Capítulo 172 UCTR: Contador progresivo . . . . . . . . . . . . . . . . . . . . . . . . .1163Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1164Representación: UCTR - Contador progresivo . . . . . . . . . . . . . . . . . . . . . . . . 1165
Capítulo 173 VMER - Lectura de VME . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1167Descripción breve: VMER - Lectura de VME . . . . . . . . . . . . . . . . . . . . . . . . . 1168Representación: VMER - Lectura de VME . . . . . . . . . . . . . . . . . . . . . . . . . . . 1169Descripción de parámetros: VMER - Lectura de VME . . . . . . . . . . . . . . . . . . 1171
Capítulo 174 VMEW - Escritura de VME . . . . . . . . . . . . . . . . . . . . . . . . . . .1173Descripción breve: VMEW - Escritura VME . . . . . . . . . . . . . . . . . . . . . . . . . . 1174Representación: VMEW - Escritura de VME. . . . . . . . . . . . . . . . . . . . . . . . . . 1175Descripción de parámetros: VMEW - Escritura de VME. . . . . . . . . . . . . . . . . 1177
Capítulo 175 WRIT: Escribir . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1179Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1180Representación: WRIT - Escribir puerto ASCII . . . . . . . . . . . . . . . . . . . . . . . . 1181Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1183
Capítulo 176 XMIT - Transmisión. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1185Descripción general: XMIT - Transmisión . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1186Funciones Modbus XMIT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1187
Capítulo 177 XMIT - Bloque de comunicación . . . . . . . . . . . . . . . . . . . . . .1193Descripción breve: bloque de comunicación XMIT . . . . . . . . . . . . . . . . . . . . . 1194Representación: bloque de comunicación XMIT. . . . . . . . . . . . . . . . . . . . . . . 1195Descripción de parámetros: Asiento intermedio - Tabla de control de comunicaciones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1197Descripción de parámetros: Comunicación XMIT . . . . . . . . . . . . . . . . . . . . . 1202Descripción de parámetros: Bloque de comunicación XMIT. . . . . . . . . . . . . . 1204
Capítulo 178 XMIT - Bloque de estado de puerto. . . . . . . . . . . . . . . . . . . .1205Descripción breve: Bloque de estado de puerto XMIT . . . . . . . . . . . . . . . . . . 1206Representación: Bloque de estado de puerto XMIT . . . . . . . . . . . . . . . . . . . . 1207Descripción de parámetros: asiento intermedio - Bloque de conversión XMIT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1209
xxv

Capítulo 179 XMIT - Bloque de conversión . . . . . . . . . . . . . . . . . . . . . . . . 1213Descripción breve: Bloque de conversión XMIT . . . . . . . . . . . . . . . . . . . . . . . 1214Representación: Bloque de conversión XMIT . . . . . . . . . . . . . . . . . . . . . . . . . 1215Descripción de parámetros: Bloque de conversión XMIT . . . . . . . . . . . . . . . . 1217
Capítulo 180 XMRD: Lectura de memoria extendida . . . . . . . . . . . . . . . . 1223Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1224Representación: XMRD - Lectura de memoria extendida . . . . . . . . . . . . . . . . 1225Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1227
Capítulo 181 XMWT: Escritura en memoria extendida . . . . . . . . . . . . . . . 1229Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1230Representación: XMWT - Escritura en memoria extendida. . . . . . . . . . . . . . . 1231Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1233
Capítulo 182 XOR: OR exclusivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1235Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1236Representación: XOR - OR exclusivo booleano . . . . . . . . . . . . . . . . . . . . . . . 1237Descripción de los parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1239
Apéndices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1241
Apéndice A Apéndice A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1243Optimización del rendimiento de RIO mediante el administrador de segmentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1243Tiempo de ciclo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1244Cómo medir el tiempo de ciclo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1248Maximización del despacho de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1249Orden de resolución. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1252Utilización de la administración de segmentos para mejorar el despacho de datos de las E/S críticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1253Utilización del administrador de segmentos para mejorar el rendimiento del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1255Utilización del administrador de segmentos para mejorar el procesamiento del puerto de comunicaciones . . . . . . . . . . . . . . . . 1256Funciones de ciclo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1257
Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xxxi
Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . lv
xxvi

§
Información de seguridadAVISO Lea atentamente estas instrucciones y observe el equipo para familiarizarse con el dispositivo antes de instalarlo, utilizarlo o realizar su mantenimiento. Los mensajes especiales que se ofrecen a continuación pueden aparecer a lo largo de la documentación o en el equipo para advertir de peligros potenciales o para ofrecer información que aclare o simplifique los distintos procedimientos.
TENGA EN CUENTA
Sólo el personal de servicio cualificado podrá instalar, utilizar, reparar y mantener el equipo eléctrico. Schneider Electric no asume las responsabilidades que pudieran surgir como consecuencia de la utilización de este material.
© 2006 Schneider Electric. Todos los derechos reservados.
La inclusión de este icono en una etiqueta de peligro o advertencia indicaun riesgo de descarga eléctrica, que puede provocar daños personales sino se siguen las instrucciones.
Éste es el icono de alerta de seguridad. Se utiliza para advertir de posibles riesgos de daños personales. Observe todos los mensajes que siguen a este icono para evitar posibles daños personales o incluso la muerte.
PELIGRO indica una situación inminente de peligro que, si no se evita, provocará lesiones graves o incluso la muerte.
PELIGRO
ADVERTENCIA indica una posible situación de peligro que, si no se evita, puede provocar daños en el equipo, lesiones graves o incluso la muerte.
ADVERTENCIA
AVISO indica una posible situación de peligro que, si no se evita, puede provocar lesiones o daños en el equipo.
AVISO
31004676 4/2006 xxvii

Información de seguridad
xxviii 31004676 4/2006

Acerca de este libro
Presentación
Objeto Esta documentación le facilitará la configuración de las instrucciones LL 984 de cualquier controlador mediante ProWorx NxT, ProWorx 32 o Modbus Plus. Los ejemplos de este libro se han usado con ProWorx 32. Para LL 984 con el software Concept, consulte la biblioteca de bloques Concept LL984 (840USE49600).
Campo de aplicación
Los datos y las ilustraciones presentes en este manual no son vinculantes. Nos reservamos el derecho de modificar cualquiera de nuestros productos, según nuestra política de desarrollo continuo de productos. La información incluida en este documento está sujeta a cambios sin previo aviso y no debe interpretarse como un compromiso por parte de Schneider Electric.
Documentos relacionados
Título Reference Number
Biblioteca de bloques Concept LL 984 840 USE 496
31004676 4/2006 xxix

Acerca de este libro
Advertencia Schneider Electric no se hace responsable de ningún error que pudiera aparecer en este documento. Si tiene sugerencias para mejoras o modificaciones, o ha hallado errores en esta publicación, le rogamos que nos lo notifique.
Ninguna parte de este documento puede ser reproducida, en cualquier forma o por cualquier medio, electrónico o mecánico, incluido su fotocopiado, sin el permiso escrito expreso de Schneider Electric.
Deberán tenerse en cuenta todas las normas de seguridad nacionales, regionales y locales pertinentes a la hora de instalar y utilizar este producto. Por razones de seguridad, y para garantizar la conformidad con los datos del sistema documentado, solamente el fabricante debe encargarse de las reparaciones de los componentes.
Cuando se utilicen controladores en aplicaciones con requisitos técnicos de seguridad, siga las instrucciones pertinentes.
Si no se utiliza el software de Schneider Electric o un software compatible con nuestros productos de hardware, pueden producirse daños o lesiones o provocarse un funcionamiento inadecuado del dispositivo.
Si no se observa esta advertencia sobre el manejo del producto, pueden producirse daños personales o materiales.
Comentarios del usuario
Envíe sus comentarios a la dirección electrónica [email protected]
xxx 31004676 4/2006
31004676 4/2006
I
Información generalIntroducción
Presentación En esta sección encontrará información general sobre grupos de instrucciones y su utilización.
Contenido Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
1 Descripción general de Ladder Logic 3
2 Asignación de memoria en un UC 15
3 Códigos operacionales de Ladder Logic 29
4 Instrucciones 39
5 Grupos de instrucciones 41
6 Redes de ecuación 55
7 Control de regulación de bucle cerrado/Valores analógicos 75
8 Mensajes formateados para operaciones ASCII READ/WRIT 89
9 Coils, Contacts e Interconnects 97
10 Utilización de interrupt 103
11 Utilización de subrutinas 105
12 Instalación de instrucciones cargables DX 107
1

Información general
2 31004676 4/2006

31004676 4/2006
1
Descripción general de Ladder LogicPresentación
Descripción general
En este capítulo se ofrece una descripción general del lenguaje de programación Ladder Logic.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Segmentos y redes en Ladder Logic 4
Cómo resuelve Ladder Logic un PLC 7
Instrucciones y elementos Ladder Logic 8
3

Descripción general de Ladder Logic
Segmentos y redes en Ladder Logic
Vista general Ladder Logic es un lenguaje de programación gráfico de fácil manejo con una simbología similar a la de los relés. Sus componentes principales son elementos de asiento simple e instrucciones de asientos múltiples. Estos componentes se programan en redes, que son construcciones lógicas Ladder con un tamaño y una configuración predefinidos. Un programa de Ladder Logic comprende una secuencia de redes agrupadas en uno o más segmentos.
Red Ladder Logic
Una red es un diagrama Ladder Logic vinculado a la izquierda o a la derecha mediante barras de alimentación. Por convención, la barra de la izquierda está visible y la de la derecha está oculta. Siete escalones (o filas) van de izquierda a derecha entre las dos barras de alimentación. Cada escalón tiene 11 columnas de ancho.
Los 77 espacios formados por la intersección de los escalones y las columnas se denominan asientos. Las instrucciones y los elementos lógicos se pueden programar en estos asientos. Los 77 asientos de una red se pueden utilizar para almacenar instrucciones y elementos de Ladder Logic, que son los componentes fundamentales del programa de lógica. Existen algunas reglas de ubicación, en particular, para la ubicación de bobinas.
Barra dealimentación
NOTA: En la columna 11 sólo es posible visualizar bobinas.
4 31004676 4/2006

Descripción general de Ladder Logic
Ubicación de bobinas en una red
Cuando se inserta una bobina en el escalón de una red, no es posible ubicar ningún otro elemento o instrucción lógicos a la derecha de la bobina en ese escalón. Los siete asientos de la columna undécima están reservados para visualizar bobinas. Muchos paneles de software permiten seleccionar el modo de visualización de las bobinas en una red, ya sea en sus posiciones de resolución de lógica o de forma expandida en la columna 11, donde se pueden visualizar en paralelo. Los dos ejemplos siguientes presentan la misma estructura lógica, pero tienen un modo de visualización de bobinas distinto según las preferencias del usuario. En el primer ejemplo, las bobinas se visualizan en sus posiciones de resolución de lógica. En el segundo ejemplo, las bobinas se visualizan de forma expandida.
Aunque la visualización expandida de las bobinas muestra las bobinas en la columna undécima, éstas se resuelven en su posición real de resolución de lógica. En ambos ejemplos, la bobina 00103 se resuelve inmediatamente después del contacto 10034, y la bobina 00102 se resuelve inmediatamente después del contacto 10033. La bobina 00101 es siempre la última bobina resuelta en la red.
Bobinas visualizadas en sus posiciones de resolución de lógica
Bobinas visualizadas en posiciones extendidas
31004676 4/2006 5

Descripción general de Ladder Logic
Segmentos Ladder Logic
Dado que la estructura de una red es fija, generalmente, el programa de lógica se solapa en numerosas redes. Un grupo de redes contiguas que realiza una tarea o subtarea en el programa de aplicación se denomina segmento. No existe ningún límite preestablecido por lo que respecta al número de redes que se pueden ubicar en un segmento. El tamaño está limitado únicamente por la cantidad de memoria de usuario disponible y por la duración máxima del tiempo de ciclo del PLC (250 ms). Para las aplicaciones Ladder Logic de pequeño tamaño, un único segmento puede ser suficiente para almacenar todo el programa. Para aplicaciones de mayor envergadura, como las aplicaciones de E/S remotas de estaciones múltiples, se pueden programar varios segmentos. Como norma general para las configura-ciones RIO, el número de segmentos del programa es igual al número de estaciones de E/S. Tal vez sea necesario utilizar más segmentos que estaciones, pero nunca se deben utilizar menos segmentos que estaciones. Los segmentos están numerados (1 a n, hasta un máximo de 32) en el orden en el que hayan sido creados por el programador. Es posible modificar el orden en el que se resuelven los segmentos mediante el administrador de segmentos, un editor disponible en el software de panel que permite ajustar la tabla de orden de resolución en la memoria del sistema. Consulte el apéndice A para obtener una descripción de cómo mejorar el rendimiento del sistema mediante el administrador de segmentos. Con algunos PLC, es posible crear un segmento no administrado que contenga una o más subrutinas Ladder Logic y que se puede llamar desde los segmentos administrados mediante la función JSR.
6 31004676 4/2006

Descripción general de Ladder Logic
Cómo resuelve Ladder Logic un PLC
Vista general El PLC explora el programa Ladder Logic de forma secuencial en el orden siguiente.
Los segmentos se exploran de acuerdo con el modo en el que están programados en una tabla de orden de resolución conocida como administrador de segmentos. El administrador de segmentos se puede personalizar durante la configuración del sistema o se puede restablecer a una secuencia de exploración estándar (primero el segmento 1, después el segmento 2, luego el segmento 3, etc.).Las redes de cada segmento se exploran de forma consecutiva.Los asientos de cada red se exploran de arriba a abajo y de izquierda a derecha.
El PLC comienza a resolver la lógica en la red situada en la parte superior de la columna izquierda y sigue hacia abajo. Después, continúa en la parte superior de la columna siguiente y sigue hacia abajo, tal como se muestra en la ilustración. Cada asiento se resuelve en el orden en el que aparece en el ciclo lógico. El flujo de señal dentro de la red tiene sentido descendente y procesa las columnas de izquierda a derecha, nunca de abajo a arriba ni de derecha a izquierda.
SegmentoRed
11
SegmentoRed
12
SegmentoRed
23
Límites
Inicio
Última red del último segmento administrado
del segmento
31004676 4/2006 7

Descripción general de Ladder Logic
Instrucciones y elementos Ladder Logic
Vista general En todos los paquetes de firmware de los PLC se incluye un conjunto básico de instrucciones y elementos (contactos, bobinas y conexiones horizontales y verticales) Ladder Logic. Se puede obtener más información acerca los tipos específicos de PLCs. Esta información puede estar incluida en el paquete o pude tratarse de instrucciones descargables. Esta sección ofrece un breve lista de las instrucciones disponibles y sus funciones. En próximos capítulos de este manual se da una descripción detallada de todas las instrucciones, incluyendo los modelos de PLC en los que se encuentran disponibles.
Elementos Ladder Logic estándar
Símbolo Definición Asientos necesarios
Contacto de tipo normal abierto (N.O.) 1
Contacto de tipo normal cerrado (N.C.) 1
Contacto de tipo transición positiva (P.T.) 1
Contacto de tipo transición negativa (N.T.) 1
Bobinas normales 1
Una bobina retentiva de memoria o con retención; los dos símbolos tienen el mismo significado. El usuario puede seleccionar el que prefiera para la visualización online.
1
Una conexión horizontal 1
Una conexión vertical 1
8 31004676 4/2006

Descripción general de Ladder Logic
Instrucciones para todos los PLCs acerca de Ladder Logic estándar
Instrucciones del contador y del temporizador
Instrucciones de matemáticas de números enteros
Instrucciones de la operación de movimiento DX
Instrucción Definición Asientos necesarios
UCTR Conteo progresivo desde 0 hasta un valor preestablecido 2
DCTR Conteo regresivo desde un valor preestablecido hasta 0 2
T1.0 Temporizador que incrementa en segundos 2
T0.1 Temporizador que incrementa en décimas de segundo 2
T.01 Temporizador que incrementa en centésimas de segundo 2
Instrucción Definición Asientos necesarios
ADD Agrega el valor de asiento superior al valor de asiento intermedio
3
SUB Substrae el valor del asiento intermedio del asiento superior 3
MUL Multiplica el valor del asiento superior por el valor del asiento intermedio
3
DIV Divide el valor del asiento superior entre el valor del asiento intermedio
3
Instrucción Definición Asientos necesarios
R→Τ Mueve los valores de registro a una tabla 3
T→Ρ Mueve los valores específicos de una tabla a un registro 3
T→Τ Mueve un conjunto determinado de valores de una tabla a otra 3
BLKM Mueve un determinado bloque de datos 3
FIN Especifica la primera entrada de una cola FIFO 3
FOUT Especifica la primera entrada fuera de una cola FIFO 3
SRCH Realiza una búsqueda en la tabla 3
STAT Muestra los registros de estado que se encuentran en la tabla de estado de la memoria de sistema
1
31004676 4/2006 9

Descripción general de Ladder Logic
Instrucciones matriciales DX
Instrucción Saltear asiento
Algunas instrucciones de Ladder Logic son estándar (están integradas) en algunos PLCs pero en otros no están incluidos. Por ejemplo, los PLCs que tienen la función de comunicación Modbus Plus integrada se comercializan con una instrucción MSTR en el firmaware. Sin embargo, los PLCs que no operan con Modbus Plus no son compatibles con esta instrucción. Esta es una lista de esas instrucciones integradas
Instrucción integrada de Ladder Logic para determinados PLCs
Instrucciones de manipulación de bits
Instrucción Definición Asientos necesarios
AND Vincula dos matrices mediante la instrucción lógica AND 3
OR Incluye dos matrices mediante la instrucción lógica OR 3
XOR Excluye dos matrices mediante la instrucción lógica OR 3
COMP Realiza el complemento lógico de los valores de una matriz 3
CMPR Compara de forma lógica los valores de dos matrices 3
MBIT Realiza una modificación lógica del bit 3
SENS Realiza un sensado lógico del bit 3
BROT Realiza una rotación lógica del bit 3
Instrucción Definición Asientos necesarios
SKP Salta un número determinado de redes de un programa Ladder Logic
1
Instrucción Definición Asientos necesarios
NOBT Utiliza un registro para representar 16 bits como contactos de tipo N.O.
2
NCBT Utiliza un registro para representar 16 bits como contactos de tipo N.C.
2
NBIT Utiliza un registro de salida para representar 16 bits como bobinas normales
2
SBIT Retiene un bit en un registro de salida para que permanezca ACTIVO
2
RBIT Borra un bit que se ha establecido por medio de la instrucción SBIT
2
10 31004676 4/2006

Descripción general de Ladder Logic
Otras instrucciones matemáticas
Instrucciones de interrupt
Instrucción Definición Asientos necesarios
AD16 Añade 16 bits con/sin signo 3
SU16 Substrae 16 bits con/sin signo 3
TEST Compara la magnitud de los valores de los asientos superiores e intermedios
3
MU16 Multiplica 16 bits con/sin signo 3
DV16 Divide 16 bits con/sin signo 3
ITOF Convierte un valor entero con/sin signo en coma flotante 3
FTOI Convierte una coma flotante en una valor entero con/sin signo 3
EMTH Realiza 38 operaciones matemáticas, incluidas las operaciones matemáticas de coma flotante y operaciones extra con números enteros como, por ejemplo, calcular una raíz cuadrada.
3
BCD Convierte los valores binarios en valores BCD y viceversa. 3
Redes de ecuación
Utiliza toda una red Ladder Logic como un entorno de edición donde el usuario puede introducir ecuaciones con una sintaxis estándar.
77
Instrucción Definición Asientos necesarios
ITMR Define un temporizador de intervalo que genera interrupciones en el ciclo lógico normal e inicia una subrutina de procesado de interrupciones.
2
ID Bloquea interrupt 1
IE Habilita interrupt 1
BMDI Enmascara los interrupts generados por el temporizador y por las E/S locales, realiza un movimiento de los datos en bloque y a continuación desenmascara los interrupts
3
IMIO Permite el acceso inmediato a los módulos de E/S especificados desde Ladder Logic.
2
31004676 4/2006 11

Descripción general de Ladder Logic
Instrucciones del mensaje ASCII
Instrucciones de la subrutina Ladder Logic
Instrucciones de otras funciones
Instrucción Definición Asientos necesarios
READ Lee los datos introducidos en un dispositivo ASCII y los copia en el PLC a través de la conexión RIO
3
WRIT Envía un mensaje desde el PLC al dispositivo ASCII a través de la conexión RIO
3
COMM Combina las dos funciones ASCII READ y WRITE para los mensajes sencillos (preestablecidos) de los PLC Micro
3
Instrucción Definición Asientos necesarios
JSR Salta del ciclo lógico administrado a la subrutina Ladder Logic 2
LAB Marca el punto de entrada de una subrutina Ladder Logic 1
RET Regresa desde la subrutina a la lógica administrada 1
CTIF Se usa para instalar terminales de entrada de alta velocidad en un PLC Micro para los interrupts lógicos suministrados y para las operaciones del contador/temporizador
3
Instrucción Definición Asientos necesarios
CKSM Calcula cualquiera de los cuatro tipos de operaciones de suma de chequeado (CRC-16, LRC, CKSM directo y adición binaria)
3
MSTR Especifica una función de un menú de comandos de red 3
PID2 Lleva a cabo cálculos proporcionales, integrales y diferenciales para el control de regulación
3
PCFL Accede a funciones avanzadas desde una biblioteca de regulación de procesos
3
TBLK Mueve un bloque de datos desde una tabla a otro área de bloque determinada
3
BLKT Mueve un bloque de registros a una ubicación determinada de una tabla
3
SCIF Ofrece la función de secuenciador de tambor de tendencia y la posibilidad de realizar comparaciones de entradas dentro del programa de aplicación
3
T1MS Temporizador con incrementos en milisegundos 3
12 31004676 4/2006

Descripción general de Ladder Logic
Otras instrucciones están disponibles como instrucciones cargables para determinados PLCs. Las instrucciones cargables son compatibles con los productos de desarrollo de software opcional que se pueden adquirir para aplicaciones especiales. Las instrucciones cargables sólo se pueden utilizar en determinados modelos de PLCs. Las instrucciones cargables incluyen:
IKBR Realiza una operación de lectura indirecta del bloque. Es decir, copia los registros especificados en un bloque de trabajo de registros de salida
3
IBKW Realiza una operación de escritura indirecta del bloque. Es decir, copia los registros de un bloque de trabajo en las posiciones de registro individual
3
Instrucción Definición Asientos necesarios
HSBY Configura una copia de seguridad PLC Hot Standby 984 que toma el control de la aplicación en caso de que el PLC primario se quede fuera de servicio.
3
CHS Se trata de un método opcional para configurar una copia de seguridad Quantum Hot Standby
3
CALL Ofrece apoyo a las aplicaciones del módulo de opciones del coprocesador 984
3
MBUS PEER Inicia transacciones de mensajes en una red Modbus II 3
ESI Lleva a cabo una instrucción opcional del los PLC Quantum que son compatibles con el módulo ASCII 140 ESI 062 10 Quantum
3
FNxx Se trata de un modelo de tres asientos para crear instrucciones cargables personalizadas a través de Assembly o del código fuente C
3
DRUM ICMP Da apoyo a la lógica de la aplicación de cadena secuencial de control en algunos modelos de PLC que no incorporan instrucciones SCIF
3
MATH DMATH
Da apoyo a algunas raíces cuadradas, logaritmos y funciones de matemática de doble precisión en los PLC que no son compatibles con la biblioteca Enhanced Math
3
EARS Da apoyo a un sistema de grabado de evento/alarma realizando un seguimiento de eventos/alarmas y un informe de mensajes de maraca de tiempo
3
EUCA Lleva a cabo un algoritmo de conversión de unidades físicas 3
HLTH Detecta modificaciones en el sistema de E/S e informa de los problemas excepcionalmente
3
Instrucción Definición Asientos necesarios
31004676 4/2006 13

Descripción general de Ladder Logic
14 31004676 4/2006

31004676 4/2006
2
Asignación de memoria en un UCPresentación
Descripción general
En este capítulo se describe la asignación de memoria en un UC.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Memoria de usuario 16
Valores de la memoria de señal 18
Estructura de la memoria de señal 20
La tabla de configuración 22
Tabla de asignación E/S 27
15

Asignación de memoria en un UC
Memoria de usuario
Vista general La memoria de usuario es el espacio disponible en el PLC para el programa lógico y la administración del sistema. El tamaño de la memoria de usuario oscila entre 1k y 64k de palabras, dependiendo del tipo y el modelo del PLC. Cada palabra de la memoria de usuario se almacena en la página 0 de la estructura de memoria del PLC. Las palabras pueden tener una longitud de 16 o de 24 bits en función del tamaño de la CPU.
Lógica de usuario
La cantidad de espacio disponible para la lógica de aplicación se calcula restando la cantidad de espacio consumido por la administración del sistema a la cantidad total de lógica de usuario. La administración de sistema en una configuración de sistema relativamente conservadora puede consumir alrededor de 1.000 palabras; las configuraciones de sistema con asignaciones de E/S moderadas o amplias requieren una mayor administración de sistema.
Memoria de usuario
Ladder Logic requiere una palabra de memoria de 16 ó 24 bits para identificar de forma unívoca cada asiento de un programa de aplicación. Los contactos y las bobinas ocupan un asiento y, por tanto, una palabra. Las instrucciones, que normalmente comprenden dos o tres asientos, requieren dos o tres palabras respectivamente. Otros elementos que controlan la exploración del programa [inicio de una red (SON), inicio de una columna (BOC), conexiones horizontales] también utilizan una palabra de la memoria de lógica de usuario.
Diagnóstico CKSMTabla de configuraciónInstrucciones cargables
Asignación de E/SAdministrador de segmentos
(129 palabras)Tablas de bloque STAT(hasta 277 palabras)
Diagnósticos del sistemaAmpliación de configuración
Tabla (opcional)Rango de mensajes ASCII
(opcional)
Programa de aplicación
Adm
inis
traci
ón
Lógica deusuario
Aproximadamente888 palabras
Página 0de
l sis
tem
a
de usuario
16 31004676 4/2006
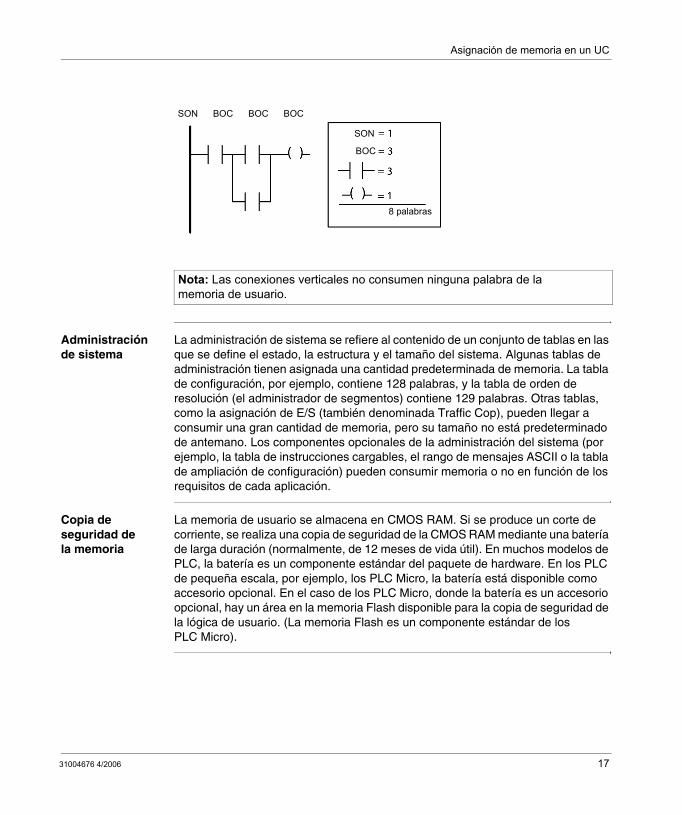
Asignación de memoria en un UC
Administración de sistema
La administración de sistema se refiere al contenido de un conjunto de tablas en las que se define el estado, la estructura y el tamaño del sistema. Algunas tablas de administración tienen asignada una cantidad predeterminada de memoria. La tabla de configuración, por ejemplo, contiene 128 palabras, y la tabla de orden de resolución (el administrador de segmentos) contiene 129 palabras. Otras tablas, como la asignación de E/S (también denominada Traffic Cop), pueden llegar a consumir una gran cantidad de memoria, pero su tamaño no está predeterminado de antemano. Los componentes opcionales de la administración del sistema (por ejemplo, la tabla de instrucciones cargables, el rango de mensajes ASCII o la tabla de ampliación de configuración) pueden consumir memoria o no en función de los requisitos de cada aplicación.
Copia de seguridad dela memoria
La memoria de usuario se almacena en CMOS RAM. Si se produce un corte de corriente, se realiza una copia de seguridad de la CMOS RAM mediante una batería de larga duración (normalmente, de 12 meses de vida útil). En muchos modelos de PLC, la batería es un componente estándar del paquete de hardware. En los PLC de pequeña escala, por ejemplo, los PLC Micro, la batería está disponible como accesorio opcional. En el caso de los PLC Micro, donde la batería es un accesorio opcional, hay un área en la memoria Flash disponible para la copia de seguridad de la lógica de usuario. (La memoria Flash es un componente estándar de los PLC Micro).
Nota: Las conexiones verticales no consumen ninguna palabra de la memoria de usuario.
SON BOC BOC BOC
SON
BOC
8 palabras
31004676 4/2006 17
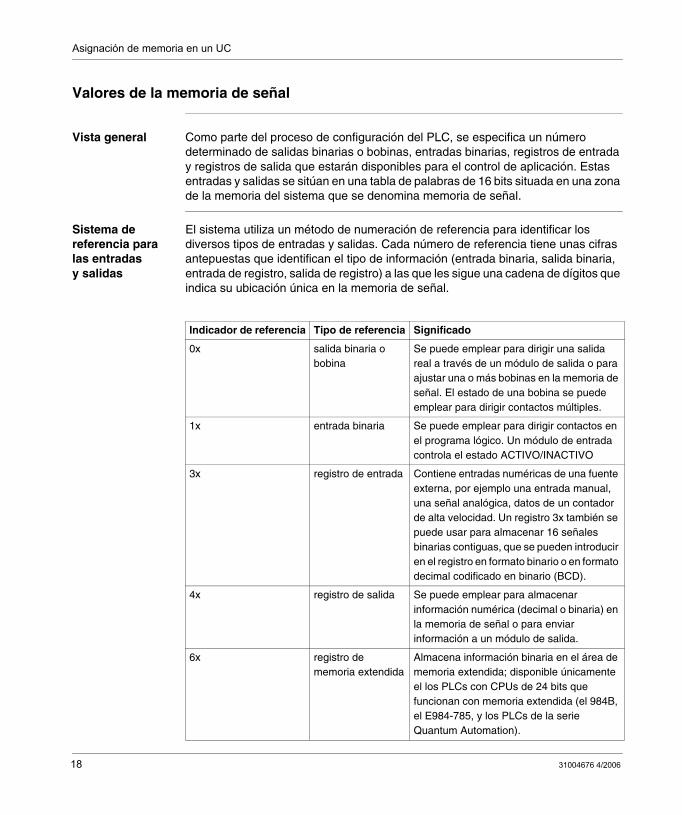
Asignación de memoria en un UC
Valores de la memoria de señal
Vista general Como parte del proceso de configuración del PLC, se especifica un número determinado de salidas binarias o bobinas, entradas binarias, registros de entrada y registros de salida que estarán disponibles para el control de aplicación. Estas entradas y salidas se sitúan en una tabla de palabras de 16 bits situada en una zona de la memoria del sistema que se denomina memoria de señal.
Sistema de referencia para las entradas y salidas
El sistema utiliza un método de numeración de referencia para identificar los diversos tipos de entradas y salidas. Cada número de referencia tiene unas cifras antepuestas que identifican el tipo de información (entrada binaria, salida binaria, entrada de registro, salida de registro) a las que les sigue una cadena de dígitos que indica su ubicación única en la memoria de señal.
Indicador de referencia Tipo de referencia Significado
0x salida binaria o bobina
Se puede emplear para dirigir una salida real a través de un módulo de salida o para ajustar una o más bobinas en la memoria de señal. El estado de una bobina se puede emplear para dirigir contactos múltiples.
1x entrada binaria Se puede emplear para dirigir contactos en el programa lógico. Un módulo de entrada controla el estado ACTIVO/INACTIVO
3x registro de entrada Contiene entradas numéricas de una fuente externa, por ejemplo una entrada manual, una señal analógica, datos de un contador de alta velocidad. Un registro 3x también se puede usar para almacenar 16 señales binarias contiguas, que se pueden introducir en el registro en formato binario o en formato decimal codificado en binario (BCD).
4x registro de salida Se puede emplear para almacenar información numérica (decimal o binaria) en la memoria de señal o para enviar información a un módulo de salida.
6x registro de memoria extendida
Almacena información binaria en el área de memoria extendida; disponible únicamente el los PLCs con CPUs de 24 bits que funcionan con memoria extendida (el 984B, el E984-785, y los PLCs de la serie Quantum Automation).
18 31004676 4/2006

Asignación de memoria en un UC
Almacena-miento de datos binarios y datos de registro en la memoria de señal
Los datos de la memoria de señal se almacenan en palabras de 16 bits en la página F de la memoria de sistema. La tabla de memoria de señal va seguida de una tabla de historial binaria que almacena el estado que los bits tenían al finalizar el ciclo anterior. También va seguida de una tabla del actual estado HABILITAR/DESACTIVAR de todos los valores binarios (0x y 1x) de la memoria de señal.
Cada valor 0x o 1x que se emplee en la lógica de aplicación está representado por un bit en una palabra en la memoria de señal, por un bit en una palabra en la tabal de historial y por un bit en una palabra en la tabla DESACTIVAR. Es decir, por cada palabra binaria de la tabla de memoria de señal hay una palabra correspondiente en la tabla historial y una palabra correspondiente en la tabla DESACTIVAR. Los estados de entrada del contador del ciclo anterior se representan en la página F, en una tabla de historial de contador progresivo/regresivo. Cada registro de contador está representado por un único bit en una palabra en la tabla; el valor 1 indica que la entrada superior del último ciclo fue ACTIVO, y el valor 0 indica que la entrada superior del último ciclo fue INACTIVO.
Memoria de señal
Tablas HABILITAR/BLOQUEARTablas de historial binarias
Tabla de historial de 4x
Indicadores EOL*Códigos de bloqueado fatal*
ID Executive*Versión Executive nº*
*No disponible en losPLCs 984A/B/X
16 bits
página F
31004676 4/2006 19

Asignación de memoria en un UC
Estructura de la memoria de señal
Vista general Las palabras se introducen en la tabla de memoria de señal de arriba a abajo en el siguiente orden.
Las referencias binarias se introducen antes que los registros y las palabras 0x antes que las palabras 1x. Las referencias binarias se almacenan en palabras que contienen 16 referencias binarias contiguas. Las palabras binarias preceden a los valores de registro. Cada bloque de valores de los registros 3x y 4x debe comenzar con una palabra que sea múltiplo de 16. Por ejemplo, si asigna cinco palabras a ochenta referencias 0x y cinco palabras a ochenta referencias 1x habrá utilizado las palabras de 0001 a 0010 en la memoria de señal. Las palabras de 0011 a 0016 se quedan vacías, de modo que la primera referencia 3x comienza en la palabra 0017.
Palabra 0001
Siempre comienza en un límite de 16 palabras
Siempre comienza en un límite de 16 palabras
Palabra 2048
Historial de bobina
BLOQUEAR binario
20 31004676 4/2006

Asignación de memoria en un UC
Valores mínimos de memoria de señal necesarios
Una configuración mínima se compone de las siguientes ubicaciones en la memoria de señal.
Bits de historial y de bloqueo para las referencias binarias
Por cada palabra que se asigna a las referencias binarias, otras dos palabras se asignan en las tablas de historial y de bloqueo. Estas tablas se basan en la tabla de memoria de señal de la página F que se encuentra en la memoria de sistema. Se crean de abajo a arriba y de la siguiente manera:
Tipo de referencia
Mínimo de palabras para Modsoft
Mínimo de palabras para P190
Mínimo de bits para Modsoft
Mínimo de bits para los valores binarios
Salida binaria (0x) 3 1 48 16
Entrada binaria (1x)
1 1 16 16
Entrada de registro (3x)
1 1
Salida de registro (4x)
1 1
Bits de historial de salida
Bits de historial de entrada
Bits BLOQUEAR salida
Bits BLOQUEAR entrada
Palabra 0001
Palabra 2048
31004676 4/2006 21

Asignación de memoria en un UC
La tabla de configuración
Vista general La tabla de configuración es una de las piezas clave de la administración del sistema contenida en la memoria de sistema. Comprende 128 palabras consecutivas y proporciona un medio de información de acceso que define las capacidades del sistema de control y el programa de lógica de usuario.
Con ayuda del software de panel de programación se puede acceder al editor de configuración que permite especificar los parámetros de configuración (como los que se muestran en la página siguiente) para el sistema de control. Si la memoria del PLC está vacía, en el llamado ESTADO INDEFINIDO, no se puede escribir una asignación E/S o un programa de lógica de usuario. Por lo tanto, la primera tarea de programación que se debe llevar a cabo con un nuevo PLC consiste en escribir una tabla de configuración válida haciendo uso del editor de configuración.
Asignación de una bobina de batería
Se puede reservar una bobina 0x en la configuración para reflejar el estado actual del sistema auxiliar de batería del PLC. Si se ajusta esta bobina y es solicitada para consultar, muestra un valor binario de 0, que indica que el sistema de batería está en funcionamiento, o de 1, que indica que el sistema de batería no está en funcionamiento.
Asignación del registro de temporizador
Se puede reservar un registro 4x en la configuración como temporizador de sincronización. Este temporizador guarda una cantidad de frecuencias de reloj en incrementos de 10 ms. Si el registro está establecido y se solicita para consulta, se muestra un valor de ciclo libre que oscila entre 0000 y FFFF hex. con reinicio cíclico hasta 0000.
Nota: Si se está realizando un encaminamiento de direcciones explícitas en modalidad Bridge en una red Modbus Plus, la ubicación de la tabla de direcciones explícitas dentro de la configuración depende de la dirección del registro de temporizador, es decir, es necesario asignar un registro de temporizador para crear la tabla de direcciones explícitas. La tabla de direcciones explícitas puede contener de 0 a 10 bloques, cada bloque incluye cinco registros 4x consecutivos. La dirección del primer bloque en la tabla de direcciones explícitas comienza con el registro 4x, inmediatamente después de la dirección asignada al registro de temporizador. Por tanto, cuando se asigna el registro de temporizador, se debe elegir una dirección de registro 4x que tenga los siguientes 5 a 50 registros libres para este tipo de aplicación.
22 31004676 4/2006

Asignación de memoria en un UC
Reloj de fecha/hora
Cuando se realiza en la configuración una asignación de registro de salida 4x para el reloj de fecha/hora (TOD), este registro y los siete siguientes registros consecutivos (4x a 4x + 7) se reservan en la configuración para guardar la información TOD. El bloque de registros está implementado de la siguiente manera.
El bloque de registros está implementado de la manera que se indica a continuación. Por ejemplo, si se configura el registro 40500 para el reloj TOD, es necesario establecer los bits correctamente como se indica más abajo, después se leen los valores del reloj a las 9:25:30 del martes 16 de julio, 1991, los valores de registro mostrados en formato decimal se leerían:
Registro Definición
4X
4X+1 Día de la semana (Domingo = 1, Lunes = 2, etc.)
4x+2 Mes del año (Ene = 1, Feb = 2, etc.)
4x+3 Día del mes (1 a 31)
4x+4 Año (00 a 99)
4x+5 Hora en formato militar (0 a 23)
4x+6 Minuto (0 a 59)
4x+7 Segundo (0 a 59) Cuando se realiza en la configuración una asignación de registro de salida 4x para el reloj de fecha/hora (TOD), este registro y los siete siguientes registros consecutivos (4x a 4x + 7) se reservan en la configuración para guardar la información TOD.
1 = Error
1 = Los valores de reloj están en proceso de lectura1 = Los valores de reloj se están en proceso de establecimiento
Registro de control:
1 = Todos los valores de reloj han sido establecidos
31004676 4/2006 23

Asignación de memoria en un UC
Registro Definición
400500 0110000000000000
400501 3 (decimal)
400502 7 (decimal)
400503 16 (decimal)
400504 91 (decimal)
400505 9 (decimal)
400506 25 (decimal)
400507 30 (decimal)
Tipo de datos Formato Ajuste estándar Indicaciones y excepciones
# de bovinas Par múltiplo de 16 16
# de entradas binarias
Par múltiplo de 16 16
# de salidas de registro
01
# de entradas de registro
01
# de estaciones de E/S
Hasta 32, dependiendo del tipo de PLC
01 Sólo se usa cuando la E/S está configurada en estaciones.
# de módulos de E/S
Hasta 1024, dependiendo del tipo de PLC
00 El editor no los muestra, los usa el sistema para calcular palabras de asignación E/S.
# de segmentos lógicos
Generalmente igual al # de estaciones
00 Añade un segmento adicional para subrutinas.
# de canales de E/S Número par de 02 a 32
02 Sólo se usa cuando la E/S está configurada en canales.
Tamaño de memoria
Depende del PLC Depende del PLC
24 31004676 4/2006

Asignación de memoria en un UC
Parámetros de puerto Modbus (RS-232)
Tabla de mensajes ASCII
Modalidad de comunicación ASCII o RTU RTU Indicaciones
Velocidad de transferencia (baudios)
50, 75, 110, 134.5, 150, 300, 600, 1200, 1800, 2000, 2400, 3600, 4800, 7200, 9600, 19200
9600
Paridad ACTIVO/INACTIVO, PAR/IMPAR
ACTIVADO/PAR
Bit(s) de parada 1 ó 2 2
Dirección de equipo 001...247 001
Tiempo de retardo (en ms)
10...20 (que representan 10...20 ms)
01 (10 ms)
Los tiempos de retardo del puerto Modbus se implementan únicamente en los PLC 984A/B/X.
# de mensajes Hasta 9999 00 Si el PLC no admite E/S remotas, no puede admitir equipos ASCII. (excepción: los PLC Micro)
Tamaño del campo de mensajes
Diferencia decimal > 0 < entre el tamaño de memoria (32K or 64K) y la administración del sistema
00
#de puertos ASCII
Dos por estación, hasta 32 00
Parámetros de puerto ASCII
BaudiosParidad# de bits de parada# de bits de datos por carácterPresencia de un teclado
1200ACTIVADO/PAR01
08
NO
Entrada ASCII Un valor 4x que representa el primero de los 32 registros para una entrada ASCII simple
NO Sólo un PLC 984B admite la entrada ASCII simple
Salida ASCII Un valor 4x que representa el primero de los 32 registros para una salida ASCII simple
NO Sólo un PLC 984B admite la salida ASCII simple
31004676 4/2006 25

Asignación de memoria en un UC
Funciones especiales
Instrucciones cargables
Escritura de datos de configuración en la memoria de sistema
Funciones de salteo permitidas
SI/NO No
Registro de temporizador
Un registro 4x reservado para mantener un número de frecuencias de reloj de 10 ms
NO
Reloj TOD Un registro 4x, el primero de los ocho registros reservados para valores de fecha/hora
NO
Bobina de batería Una referencia 0x que refleja el estado del sistema auxiliar de bateria 00000
00000 Una vez puesta la batería en una tabla de configuración no se puede eliminar.
Instalación de instrucciones cargables
CONTINUAR o CANCELAR
Los diferentes controladores admiten distintos tipos de conjuntos de instrucción cargable Asegúrese de que las instrucciones cargables y el controlador son compatibles.
Eliminación de instrucciones cargables
ELIMINAR TODAS, ELIMINAR UNA o CANCELAR
Los diferentes controladores admiten distintos tipos de conjuntos de instrucción cargable Asegúrese de que las instrucciones cargables y el controlador son compatibles.
Escritura de datos según lo especificado
CONTINUAR o CANCELAR
NO CONTINUAR sobrescribirá cualquier dato de la tabla anterior
26 31004676 4/2006

Asignación de memoria en un UC
Tabla de asignación E/S
Vista general De la misma manera que un PLC necesita estar físicamente vinculado a módulos de E/S para funcionar como un sistema de control, así, las referencias en la lógica de usuario tienen que estar vinculadas en la arquitectura del sistema a las señales recibidas desde los módulos de entrada y enviadas a los módulos de salida. La tabla de asignación E/S proporciona este vínculo.
Determinación del tamaño de la tabla de asignación E/S
La tabla de asignación E/S direcciona el flujo de datos entre las señales de entrada/salida y el programa de lógica de usuario, indica al PLC cómo ejecutar entradas en la lógica de usuario y proporciona una ruta para mandar señales a los módulos de salida. La tabla de asignación E/S, almacenada en la página 0 de la memoria del sistema, requiere una gran parte no determinada de la administración del sistema. Su longitud es una función del número de puntos de E/S binarios y del registro que el sistema ha ejecutado y se define por el tipo de módulos de E/S que se especifique en la tabla de configuración.
El tamaño mínimo permitido de la tabla de asignación E/S es de nueve palabras.
Escritura de datos en la asignación E/S
Con ayuda del software de panel de programación se puede acceder al editor de asignación E/S, que permite definir:
el número de estaciones en el sistema remoto de E/S
el número de valores binarios/registros que se pueden utilizar para entrada y salida
el número, tipo y ubicación del slot de los módulos de E/S en la estación.
los números de referencia que vinculan los valores binarios/registros con los módulos de E/S
el tiempo de autonomía de estación para cada estación de E/S
las direcciones de puerto de mensajes ASCII (si se han utilizado) para todas las estaciones
31004676 4/2006 27

Asignación de memoria en un UC
28 31004676 4/2006

31004676 4/2006
3
Códigos operacionales de Ladder LogicPresentación
Descripción general
En este capítulo se presentan los códigos operacionales de Ladder Logic.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Traducción de elementos Ladder Logic a la base de datos de la memoria de sistema
30
Traducción de instrucciones DX a la base de datos de la memoria de sistema 33
Código operacional predeterminado para las instrucciones cargables 36
29

Códigos operacionales de Ladder Logic
Traducción de elementos Ladder Logic a la base de datos de la memoria de sistema
Vista general Un PLC traduce automáticamente los elementos simbólicos Ladder y los bloques de función en asientos de base de datos que están almacenados en la página 0 de la memoria de sistema. Un asiento Ladder Logic es una palabra de 16 o 24 bits—un elemento, como un contacto, se traduce en un asiento de base de datos, mientras que una instrucción, como un bloque ADD, se traduce en tres asientos de base de datos. El formato de base de datos es diferente en los asientos de 16 bits y de 24 bits.
Los cinco bits de mayor valor de un asiento de 16 bits y los ocho bits de mayor valor de un asiento de 24 bits—los bits x—están reservados para códigos operacionales. Un código operacional define el tipo de elemento funcional asociado con el asiento—por ejemplo, el código 01000 especifica que el asiento es un contacto de tipo normal abierto y el código 11010 especifica que el asiento es el tercero de los tres asientos de un bloque de función de multiplicación.
Formato de asiento de 16 bits
Formato de asiento de 24 bits
30 31004676 4/2006

Códigos operacionales de Ladder Logic
Traducción de elementos Logic y funciones que no son DX
Cuando el sistema está traduciendo elementos estándar Ladder Logic y bloques de función que no son DX hace uso de los bits restantes (Y y Z) como pointers para ubicaciones de registro o de bit en la memoria de señal, asociadas a los valores binarios o registros utilizados en su programa Ladder Logic. Con un asiento de 16 bits, 11 bits están disponibles como pointers de la memoria de señal, aportándole una capacidad total de direccionamiento de 2048 palabras. El máximo número de registros configurables en la mayoría de las máquinas de 16 bits es 1920, con el resto ocupado por un máximo de 128 palabras (2048 bits) de referencia binaria, bits de bloqueo y bits de historial. Los PLC 984-680/-685 son una excepción. Éstos tienen una opción de registros ampliada que admite 4096 registros en la memoria de señal. Con un asiento de 24 bits, 16 bits están disponibles como pointers de la memoria de señal. El máximo número de registros configurables en una máquina de 24 bits es 9999. Los códigos operacionales están expresados en general por sus valores hexadecimales.
Código operacional Definición
00 Comienzo de una columna en una red
01 Comienzo de una columna en una red
02 Comienzo de una columna en una red
03 Comienzo de una columna en una red
04 Inicio de una red
05 Intercambio E/S / final de lógica
06 Elemento nulo
07 Conexión horizontal
08 Contacto normal abierto (N.O)
09 Contacto normal cerrado (N.C)
0A Contacto de transición positiva (P.T)
0B Contacto de transición negativa (N.T)
0C Bobina normal
0D Bobina retentiva (con retención) de memoria
0E Función de salteo de cantidad constante
0F Función de salteo de cantidad de registro
10 Almacenamiento del valor constante
11 Referencia de registro
12 Referencia de grupo binario
13 Instrucción DCTR
14 Instrucción UCTR
15 Instrucción T1.0
16 Instrucción T0.1
31004676 4/2006 31

Códigos operacionales de Ladder Logic
17 Instrucción T.01
18 Instrucción ADD
19 Instrucción SUB
1A Instrucción MULT
1B Instrucción DIV
31 Instrucción AD16
32 Instrucción SU16
33 Instrucción MU16
34 Instrucción DV16
35 Instrucción TEST
36 Instrucción ITOF
37 Instrucción FTOI
5E Instrucción PID2
7F Instrucción EMTH
9F Instrucción BLKT
BE Instrucción LAB
BF Instrucción CKSM o MSTR
DE Instrucción DMTH o JSR
DF Instrucción TBLK
FE Instrucción RET
Código operacional Definición
32 31004676 4/2006

Códigos operacionales de Ladder Logic
Traducción de instrucciones DX a la base de datos de la memoria de sistema
Uso de los bits X y Z en los asientos de 16 bits
Cuando se usa una CPU de 16 bits, quedan únicamente cuatro combinaciones más de bits x 111000, 11101, 11110 y 11111 con las que expresar códigos operacionales para las instrucciones DX. Para conseguir los valores de bit necesarios, el sistema utiliza los tres bits de menor valor (Z) junto con los bits x para expresar los códigos operacionales.
R TT RT TBLKMFINFOUTSRCHSTAT
ANDORCMPRSENSMBITCOMPXORBROT
READWRIT
Para opciones cargables
31004676 4/2006 33

Códigos operacionales de Ladder Logic
Uso de los bits X y Z en los asientos de 24 bits
En las CPU de 24 bits los bits x de mayor valor se usan para indicar el tipo de función DX. Los bits z, que son simplemente reflejo de los bits x de mayor valor, pueden ignorarse en los asientos de 24 bits.
Códigos operacionales para instrucciones DX estándar
R TT RT TBLKMFINFOUTSRCHSTAT
ANDORCMPRSENSMBITCOMPXORBROT
READWRIT
Para opciones cargables
Código operacional Definición
1c R->instrucción T
3C T->instrucción R
5C T->instrucción T
7C Instrucción BLKM
9C Instrucción FIN
BC Instrucción FOUT
DC Instrucción SRCH
34 31004676 4/2006

Códigos operacionales de Ladder Logic
Uso de los bits Y para funciones DX
Los bits Y de un asiento de base de datos con datos de función DX contienen un número binario que expresa la cantidad de registros que están siendo transferidos en la función. Un asiento de base de datos de 16 bits tiene 8 bits Y. Una CPU de 16 bits es, por lo tanto, una máquina limitada a 255 registros de transferencia por operación DX. Un asiento de base de datos de 24 bits tiene 13 bits Y. En consecuencia, una CPU de 24 bits es capaz de alcanzar el límite teórico de máquina calculado en 8191 registros de transferencia por operación DX, pero en la práctica el mayor número de registros de transferencia permitido en una operación DX de 24 bits es 999.
FC Instrucción STAT
20 Instrucción DIOH
1D Instrucción AND
3D Instrucción OR
5D Instrucción CMPR
7D Instrucción SENS
9D Instrucción MBIT
BD Instrucción COMP
DD Instrucción XOR
FD Instrucción BROT
1E Instrucción READ
3E Instrucción WRIT
7E Instrucción XMIT
9E Instrucción XMRD
51 IBKR
52 IBKW
Nota: Estos códigos operacionales es están introducidos en código fuente en el firmware del sistema correspondiente y no se pueden modificar.
Código operacional Definición
31004676 4/2006 35

Códigos operacionales de Ladder Logic
Código operacional predeterminado para las instrucciones cargables
Vista general Varias instrucciones de Ladder Logic están disponibles únicamente en paquetes de software de instrucciones cargables. Cuando las instrucciones se cargan en un controlador se almacenan en la memoria RAM, en la página 0 de la memoria de sistema. No permanecen en EPROM. Las funciones de las instrucciones cargables tienen los siguientes códigos operacionales.
Código operacional Definición
FF Instrucción HSBY
SF Instrucción CALL, FNxx, o EARS
1F Instrucción MBUS
3F Instrucción PEER
DE Instrucción DMTH
BE Instrucción MATH o EARS
FE Instrucción DRUM
7F Instrucción ICMP
36 31004676 4/2006

Códigos operacionales de Ladder Logic
Cómo realizar las operaciones de código operacional
Para que no se produzcan problemas, lo mejor es no utilizar en la misma lógica de usuario dos instrucciones cargables con códigos operacionales opuestos. Si está utilizando el software de panel MODSOFT, podrá modificar los códigos operacionales de las instrucciones cargables. El programa de ayuda loadutil incluido en el paquete de software de instrucciones cargables personalizadas de Modicon (SW-AP98-GDA) también le permite modificar los códigos operacionales de las instrucciones cargables.
Si modifica cualquier instrucción cargable de tal modo que su código operacional sea diferente al mostrado en este capítulo, deberá tener cuidado a la hora de cargar la lógica de usuario desde o hacia su controlador. Los conflictos de códigos operacionales que se puedan producir, pueden colgar el controlador destino o pueden hacer que se ejecuten en Ladder Logic los bloques de función erróneos.
Si no se respetan estas precauciones pueden producirse graves lesiones, daños materiales o incluso la muerte.
Nota: En un mismo PLC no pueden coexistir dos instrucciones con el mismo código operacional.
ADVERTENCIA
31004676 4/2006 37

Códigos operacionales de Ladder Logic
38 31004676 4/2006

31004676 4/2006
4
InstruccionesAsignación de parámetros de las instrucciones
Generalidades En la programación para controles eléctricos un usuario realiza instrucciones operacionales codificadas en forma de objetos visuales que se disponen en una estructura reconocible de Ladder Logic. Los objetos que diseña el usuario con el programa se convierten durante el proceso de descarga en códigos operacionales comprensibles para el ordenador. Estos códigos se descodifican en la CPU y son procesados por las funciones de firmware de los controladores para llevar a cabo una instrucción de control determinada.
Cada instrucción se compone de una operación, de los asientos necesarios para realizarla y de las entradas y salidas.
Asignación de parámetros
Asignación de parámetros con la instrucción DV16 a modo de ejemplo.
Instruction
Inputs Operation Nodes Outputs
Top output
Middle output
Bottom output
top nodeTop input
middle nodeMiddle input
DV16Bottom input
bottom node
e.g. DV16
39

Instrucciones
Operación La operación determina qué función deberá ejecutar la instrucción, por ejemplo, mover registros, operaciones de conversión, etc.
Asientos, entradas y salidas
Los asientos y las entradas y salidas determinan con qué se ejecutará la operación.
40 31004676 4/2006

31004676 4/2006
5
Grupos de instruccionesPresentación
Introducción En este capítulo se ofrece una visión general de los grupos de instrucciones.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Grupos de instrucciones 42
ASCII Functions 43
Instrucciones del grupo Counters y Timers 44
Instrucciones del grupo Fast I/O 45
Loadable DX 46
Instrucciones del grupo Math 47
Instrucciones del grupo Matrix 49
Miscellaneous 50
Instrucciones del grupo Move 51
Skips/Specials 52
Instrucciones del grupo Special 53
Coils, Contacts e Interconnects 54
41

Grupos de instrucciones
Grupos de instrucciones
Generalidades Todas las instrucciones se encuadran en uno de los siguientes grupos.ASCII Functions (véase p. 43)Counters/Timers (véase p. 44)Fast I/O Instructions (véase p. 45)Loadable DX (véase p. 46)Math (véase p. 47)Matrix (véase p. 49)Miscellaneous (véase p. 50)Move (véase p. 51)Skips/Specials (véase p. 52)Special (véase p. 53)Coils, Contacts and Interconnects (véase p. 54)
42 31004676 4/2006

Grupos de instrucciones
ASCII Functions
ASCII Functions Este grupo incluye las siguientes instrucciones.
Los PLC que trabajan con mensajes ASCII utilizan instrucciones denominadas READ y WRIT para gestionar el envío de mensajes a los dispositivos de visualización y la recepción de mensajes procedentes de los dispositivos de entrada. Estas instrucciones proporcionan las rutinas necesarias para la comunicación entre la tabla de mensajes ASCII de la memoria de sistema del PLC y un módulo de interfase en las estaciones de E/S remotas.
Encontrará más información en el capítulo p. 89.
Instrucción Significado Disponible en la familia de PLC
Quantum Compact Momentum Atrium
READ Leer mensajes ASCII sí no no no
WRIT Escribir mensajes ASCII sí no no no
31004676 4/2006 43

Grupos de instrucciones
Instrucciones del grupo Counters y Timers
Instrucciones del grupo Counters y Timers
Esta tabla muestra las instrucciones de contadores y temporizadores.
Instrucción Significado Disponible en la familia de PLC
Quantum Compact Momentum Atrium
UCTR Conteo progresivo desde 0 hasta un valor preestablecido
sí sí sí sí
DCTR Conteo regresivo desde un valor preestablecido hasta 0
sí sí sí sí
T1.0 Temporizador que incrementa en segundos
sí sí sí sí
T0.1 Temporizador que incrementa en décimas de segundo
sí sí sí sí
T.01 Temporizador que incrementa en centésimas de segundo
sí sí sí sí
T1MS Temporizador que incrementa en un milisegundo
sí(ver nota)
sí sí sí
Nota: La instrucción T1MS sólo se encuentra disponible en los PLC B984-102, Micro 311, 411, 512 y 612, y Quantum 424 02.
44 31004676 4/2006

Grupos de instrucciones
Instrucciones del grupo Fast I/O
Instrucciones del grupo Fast I/O
Las siguientes instrucciones han sido diseñadas para una serie de funciones conocidas generalmente como actualización de E/S inmediatas.
Encontrará más información en el p. 103.
Instrucción Significado Disponible en la familia de PLC
Quantum Compact Momentum Atrium
BMDI Mover bloque con interrupts bloqueados
sí sí no sí
ID Bloquear interrupt sí sí no sí
IE Habilitar interrupt sí sí no sí
IMIO Instrucción de E/S inmediatas
sí sí no sí
IMOD Instrucción del módulo de interrupt
sí no no sí
ITMR Interrupt del temporizador de intervalo
no sí no sí
Nota: Las instrucciones del grupo Fast I/O sólo estarán disponibles después de configurar una CPU sin ampliación.
31004676 4/2006 45
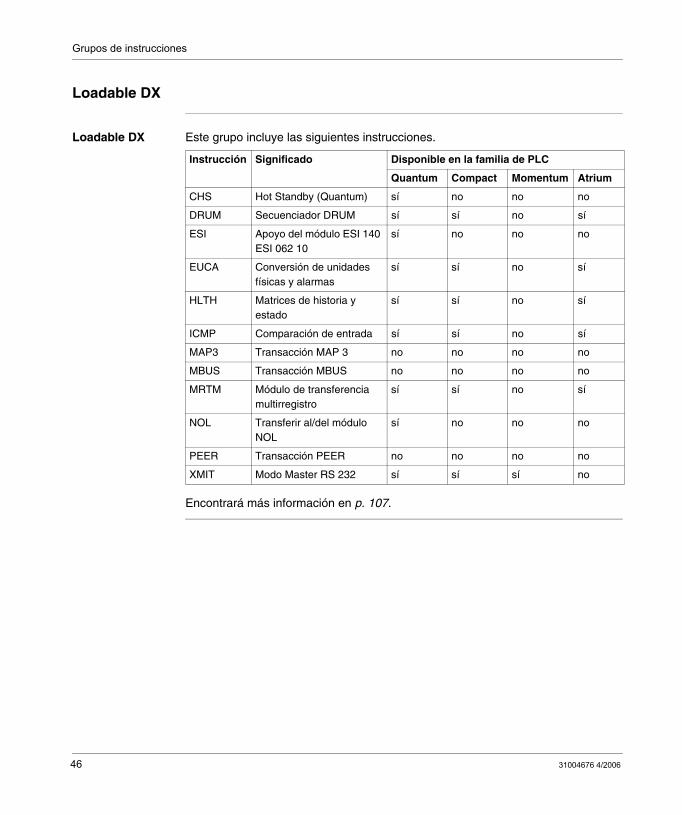
Grupos de instrucciones
Loadable DX
Loadable DX Este grupo incluye las siguientes instrucciones.
Encontrará más información en p. 107.
Instrucción Significado Disponible en la familia de PLC
Quantum Compact Momentum Atrium
CHS Hot Standby (Quantum) sí no no no
DRUM Secuenciador DRUM sí sí no sí
ESI Apoyo del módulo ESI 140 ESI 062 10
sí no no no
EUCA Conversión de unidades físicas y alarmas
sí sí no sí
HLTH Matrices de historia y estado
sí sí no sí
ICMP Comparación de entrada sí sí no sí
MAP3 Transacción MAP 3 no no no no
MBUS Transacción MBUS no no no no
MRTM Módulo de transferencia multirregistro
sí sí no sí
NOL Transferir al/del módulo NOL
sí no no no
PEER Transacción PEER no no no no
XMIT Modo Master RS 232 sí sí sí no
46 31004676 4/2006

Grupos de instrucciones
Instrucciones del grupo Math
Instrucciones del grupo Math
Hay dos grupos de instrucciones que permiten trabajar con operaciones matemáticas básicas. El primer grupo comprende cuatro instrucciones basadas en números enteros: ADD, SUB, MUL y DIV.
El segundo grupo contiene cinco instrucciones de comparación, AD16, SU16, TEST, MU16 y DV16, que admiten comparaciones y cálculos matemáticos de 16 bits con o sin signo.
Hay otras tres instrucciones adicionales, ITOF, FTOI y BCD, para convertir el formato de los valores numéricos (de entero a coma flotante, de coma flotante a entero, de binario a BCD y de BCD a binario). Las operaciones de conversión son útiles en las matemáticas expandidas.
Instrucciones basadas en números enteros
Esta parte del grupo incluye las siguientes instrucciones.
Instrucciones de comparación
Esta parte del grupo incluye las siguientes instrucciones.
Instrucción Significado Disponible en la familia de PLC
Quantum Compact Momentum Atrium
ADD Adición sí sí sí sí
DIV División sí sí sí sí
MUL Multiplicación sí sí sí sí
SUB Substracción sí sí sí sí
Instrucción Significado Disponible en la familia de PLC
Quantum Compact Momentum Atrium
AD16 Adición de 16 bits sí sí sí sí
DV16 División de 16 bits sí sí sí sí
MU16 Multiplicación de 16 bits sí sí sí sí
SU16 Substracción de 16 bits sí sí sí sí
TEST Verificación de 2 valores sí sí sí sí
31004676 4/2006 47
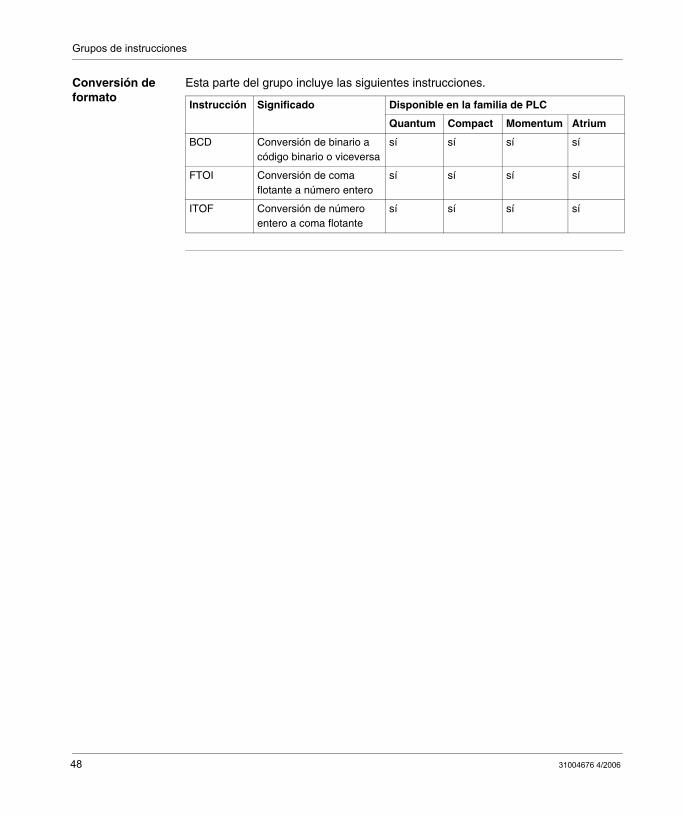
Grupos de instrucciones
Conversión de formato
Esta parte del grupo incluye las siguientes instrucciones.
Instrucción Significado Disponible en la familia de PLC
Quantum Compact Momentum Atrium
BCD Conversión de binario a código binario o viceversa
sí sí sí sí
FTOI Conversión de coma flotante a número entero
sí sí sí sí
ITOF Conversión de número entero a coma flotante
sí sí sí sí
48 31004676 4/2006

Grupos de instrucciones
Instrucciones del grupo Matrix
Instrucciones del grupo Matrix
Una matriz es una secuencia de bits de datos formada por registros o palabras consecutivas de 16 bits que proceden de tablas. Las funciones matriciales DX operan en modelos de bits dentro de tablas.
Al igual que las instrucciones del grupo Move, la longitud mínima de la tabla es 1 y la máxima depende del tipo de instrucción utilizada y del tamaño de la CPU (24 bits) del PLC.
En las tablas también se pueden introducir grupos de 16 registros binarios. El número de referencia utilizado es el primer registro binario del grupo, los otros 15 están implícitos. El número del primer registro binario debe ser del primero de 16, tipo 000001, 100001, 000017, 100017, 000033, 100033, etc.
Este grupo incluye las siguientes instrucciones.
Instrucción Significado Disponible en la familia de PLC
Quantum Compact Momentum Atrium
AND AND lógico sí sí sí sí
BROT Rotación de bits sí sí sí sí
CMPR Comparar registro sí sí sí sí
COMP Complementar matriz sí sí sí sí
MBIT Modificar bit sí sí sí sí
NBIT Control de bits sí sí no sí
NCBT Bit normal abierto sí sí no sí
NOBT Bit normal cerrado sí sí no sí
OR OR lógico sí sí sí sí
RBIT Restablecer bit sí sí no sí
SBIT Establecer bit sí sí no sí
SENS Sensado sí sí sí sí
XOR OR exclusivo sí sí sí sí
31004676 4/2006 49

Grupos de instrucciones
Miscellaneous
Miscellaneous Este grupo incluye las siguientes instrucciones.
Instrucción Significado Disponible en la familia de PLC
Quantum Compact Momentum Atrium
CKSM Suma de control sí sí sí sí
DLOG Captación automática de datos de medidas para el apoyo de lectura/escritura PCMCIA
no sí no no
EMTH Funciones de matemática extendida
sí sí sí sí
LOAD Cargar Flash sí(sólo CPU 434 12/534 14)
sí sí(sólo CCC 960 x0/980 x0)
no
MSTR Master sí sí sí sí
SAVE Guardar Flash sí(sólo CPU 434 12/534 14)
sí sí(sólo CCC 960 x0/980 x0)
no
SCIF Interfases de control secuencial
sí sí no sí
XMRD Lectura de memoria extendida
sí no no sí
XMWT Escritura en memoria extendida
sí no no sí
50 31004676 4/2006

Grupos de instrucciones
Instrucciones del grupo Move
Instrucciones del grupo Move
Este grupo incluye las siguientes instrucciones.
Instrucción Significado Disponible en la familia de PLC
Quantum Compact Momentum Atrium
BLKM Mover bloque sí sí sí sí
BLKT Mover tabla a bloque sí sí sí sí
FIN First in (en cola de espera) sí sí sí sí
FOUT First out (desde cola de espera)
sí sí sí sí
IBKR Lectura indirecta de bloque
sí sí no sí
IBKW Escritura indirecta en bloque
sí sí no sí
R → T Mover registro a tabla sí sí sí sí
SRCH Buscar tabla sí sí sí sí
T → R Mover tabla a registro sí sí sí sí
T → T Mover tabla a tabla sí sí sí sí
TBLK Mover tabla a bloque sí sí sí sí
31004676 4/2006 51
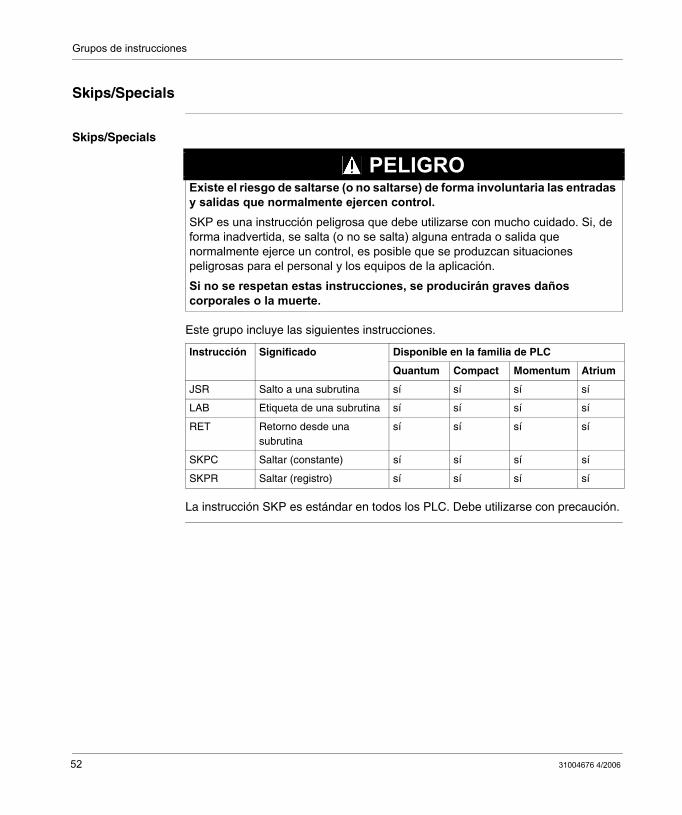
Grupos de instrucciones
Skips/Specials
Skips/Specials
Este grupo incluye las siguientes instrucciones.
La instrucción SKP es estándar en todos los PLC. Debe utilizarse con precaución.
Existe el riesgo de saltarse (o no saltarse) de forma involuntaria las entradas y salidas que normalmente ejercen control.SKP es una instrucción peligrosa que debe utilizarse con mucho cuidado. Si, de forma inadvertida, se salta (o no se salta) alguna entrada o salida que normalmente ejerce un control, es posible que se produzcan situaciones peligrosas para el personal y los equipos de la aplicación.
Si no se respetan estas instrucciones, se producirán graves daños corporales o la muerte.
Instrucción Significado Disponible en la familia de PLC
Quantum Compact Momentum Atrium
JSR Salto a una subrutina sí sí sí sí
LAB Etiqueta de una subrutina sí sí sí sí
RET Retorno desde una subrutina
sí sí sí sí
SKPC Saltar (constante) sí sí sí sí
SKPR Saltar (registro) sí sí sí sí
PELIGRO
52 31004676 4/2006

Grupos de instrucciones
Instrucciones del grupo Special
Instrucciones del grupo Special
Estas instrucciones se utilizan en situaciones especiales para medir eventos estadísticos de todo el sistema lógico o crear situaciones especiales de control de bucle.
Este grupo incluye las siguientes instrucciones.
Instrucción Significado Disponible en la familia de PLC
Quantum Compact Momentum Atrium
DIOH Estado funcional de E/S distribuidas
sí no no sí
PCFL Biblioteca de funciones de regulación de procesos
sí sí no sí
PID2 Proporcional-integral-derivada
sí sí sí sí
STAT Estado sí sí sí sí
31004676 4/2006 53

Grupos de instrucciones
Coils, Contacts e Interconnects
Coils, Contacts e Interconnects
Todas las familias de PLC disponen de bobinas, contactos e interconexiones.Bobina normalBobina retentiva de memoria o con retenciónContacto de tipo normal abierto (N.O.)Contacto de tipo normal cerrado (N.C.)Contacto de transición positiva (P.T.)Contacto de transición negativa (N.T.)Conexión horizontalConexión vertical
54 31004676 4/2006

31004676 4/2006
6
Redes de ecuaciónPresentación
Descripción general
La red de ecuación es una variable de Ladder Logic estándar. En vez de utilizar una configuración de bloques de función de dos o tres alturas, esta instrucción toma una red Ladder Logic y la utiliza como un editor donde se puede crear una ecuación compleja utilizando notación algebraica. Permite utilizar operadores matemáticos estándar como +, -, *, /, así como expresiones condicionales y lógicas. También le permite especificar variables y constantes según sea necesario y agrupar las expresiones en capas intercaladas de paréntesis.
El valor de una red de ecuación es su capacidad para tratar con la complejidad de forma clara y eficaz. Una ecuación compuesta de una única red de ecuación puede requerir muchas redes de Ladder Logic para producir el mismo resultado. Además, otros usuarios pueden leer y comprender una red de ecuación también sin necesidad de una anotación detallada, como suele suceder cuando se utiliza Ladder Logic estándar para cálculos complejos.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Estructura de la red de ecuación 56
Ecuaciones matemáticas en redes de ecuación 60
Operaciones matemáticas en redes de ecuación 64
Funciones matemáticas en redes de ecuación 69
Conversiones de datos en una red de ecuación 71
Diferencias de redondeo en UC sin un coprocesador matemático 73
Rendimiento de referencia 74
55

Redes de ecuación
Estructura de la red de ecuación
Vista general Una red de ecuación proporciona un modo fácil de programar complejas funciones matemáticas con valores almacenados en ubicaciones de registros. Las ecuaciones de una red de ecuación se presentan en un formato regular de izquierda a derecha, conocido técnicamente como notación infijo. El usuario programa redes de ecuación y establece su contacto de liberación y bobina(s) de salida en el editor de ecuación.
Las redes de ecuación se han introducido en los controladores Quantum Rev. 2; no todos los controladores son compatibles con las redes de ecuación. El modo más sencillo de ver si el controlador es compatible con las redes de ecuación es intentando crear uno; si el controlador no lo admite, la opción de red de ecuación situada en el menú contextual Insertar no estará disponible.
Creación de una red de ecuación
Nota: Este tipo de controlador no permite redes de ecuación en blanco. Puesto que ProWORX 32 permite redes de ecuación en blanco, recuerde que no se guardarán en el controlador.
Paso Acción
1 En el panel del Navegador de red, hacer clic en la red en la que desee insertar la red de ecuación.
2 Hacer clic con el botón derecho en el editor de lógica y, a continuación, hacer clic en Insertar → Red de ecuación. Una red de ecuación ocupa una red completa, independientemente del contenido de la red de ecuación.
56 31004676 4/2006

Redes de ecuación
Utilización de la red de ecuación
Descripciones de bobina
Introduzca una referencia 0x.
Paso Acción
1 Introducir la ecuación.
2 En el panel Propiedades, hacer clic en el campo Tipo de entrada y seleccionar un tipo de entrada en la lista.
3 En el campo Offset de entrada, introducir la referencia de entrada.
4 Establecer la dirección de registro para las bobinas de salida. Se puede introducir la dirección directa (en formato numérico X:Y) o una dirección simbólica. También se pueden insertar direcciones desde el panel de lista Símbolos, la tabla de direcciones de registro utilizadas y el resumen del descriptor. Consulte más abajo las descripciones de bobina.
5 Para introducir una ecuación en una red:Hacer clic en cuadro de elipsis del campo Ecuación.oHacer doble clic en cualquier parte del editor de red de ecuación.
Bobina Descripción
Resuelto correctamente
Resuelto correctamente se establece cuando la ecuación se está resolviendo sin errores.
< Bobina Resultado < 0 se establece cuando el resultado de la ecuación es menor que cero.
= Bobina Resultado = 0 se establece cuando el resultado de la ecuación es igual a cero.
> Bobina Resultado > 0 se establece cuando el resultado de la ecuación es mayor que cero.
Error en bobina
Este error de bobina aparece cuando se han producido errores durante la resolución de la ecuación. Mientras está online, si la bobina de error recibe alimentación, aparecerá un mensaje de error bajo la bobina describiendo el error (consulte p. 58).
Nota: Si no desea utilizar una bobina de salida concreta, deje la dirección de dicha bobina en blanco (o elimine una ya introducida). Dicha bobina no se incluirá en la red de ecuación.
31004676 4/2006 57

Redes de ecuación
Mensajes de error en bobina
Configuración de un contacto de liberación
Al configurar un contacto de liberación de red de ecuación se activa la red de ecuación. Si un contacto de liberación pasa corriente, la red de ecuación se resolverá. Puede modificar los ajustes del contacto de liberación en la pantalla del editor de liberación.
Para seleccionar un tipo de contacto de liberación, seleccione el símbolo del contacto de liberación que corresponda al tipo elegido. Un contacto de liberación puede estar normalmente abierto, cerrado, con conexión horizontal o abierto horizontal.
Para seleccionar una dirección de registro para el contacto de liberación, en el campo de dirección Contacto de liberación, introduzca la dirección directa (en formato numérico X:Y) o una dirección simbólica para la bobina del contacto de liberación. Este campo sólo está disponible si el tipo de contacto de liberación es un contacto normalmente abierto o normalmente cerrado.
Contenido de la red de ecuación
El contenido de la red de ecuación se expresa con la fórmula:
resultado = expresión algebraica
donde:
Mensaje de error Significado
Comando inválido Error interno generado por el coprocesador matemático.
Desbordamiento Un valor es demasiado grande para representarse en su tipo de datos específico.
Subdesbordamiento Un número es demasiado pequeño para representarse en el formato FP (sólo para los datos con coma flotante)
Divide by 0 La variable, constante, o resultado de una función directamente a la derecha de un operador / tiene el valor cero.
Invalid operation with boolean data
Se produce cuando se introduce un valor booleano en un argumento a una función.
El resultado es una variable contenida en 1 o 2 registros 4x. Puede ser un número entero corto de 16 bits con signo o sin él, un número entero largo de 32 bits con signo o sin él, o un número con coma flotante.
La expresión algebraica es
una construcción sintácticamente correcta de variable y/o datos de la constante, operadores algebraicos estándar y/o funciones. Los paréntesis se pueden utilizar para definir el orden en el que se evalúa la expresión e indican argumentos a las funciones dentro de la expresión.
58 31004676 4/2006
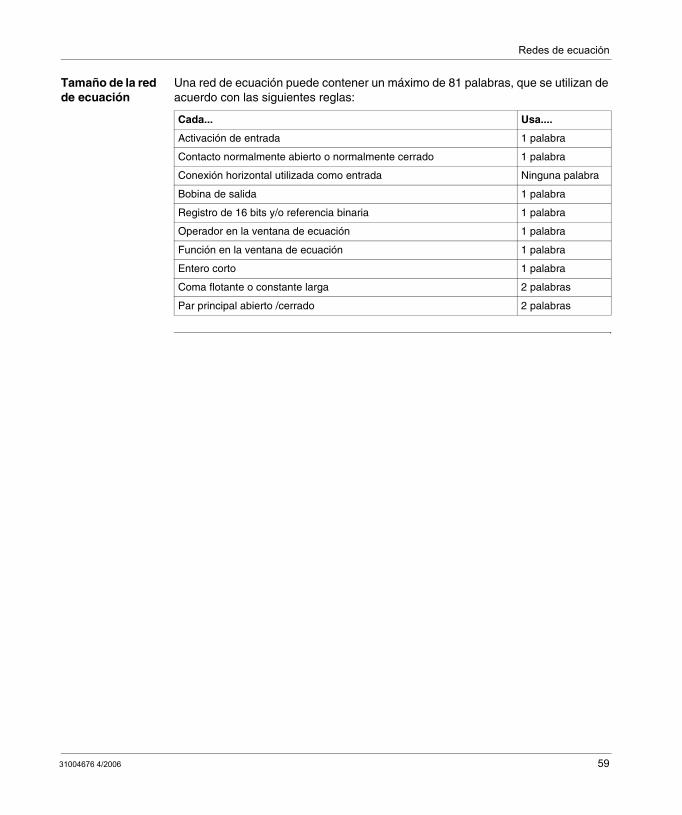
Redes de ecuación
Tamaño de la red de ecuación
Una red de ecuación puede contener un máximo de 81 palabras, que se utilizan de acuerdo con las siguientes reglas:
Cada... Usa....
Activación de entrada 1 palabra
Contacto normalmente abierto o normalmente cerrado 1 palabra
Conexión horizontal utilizada como entrada Ninguna palabra
Bobina de salida 1 palabra
Registro de 16 bits y/o referencia binaria 1 palabra
Operador en la ventana de ecuación 1 palabra
Función en la ventana de ecuación 1 palabra
Entero corto 1 palabra
Coma flotante o constante larga 2 palabras
Par principal abierto /cerrado 2 palabras
31004676 4/2006 59
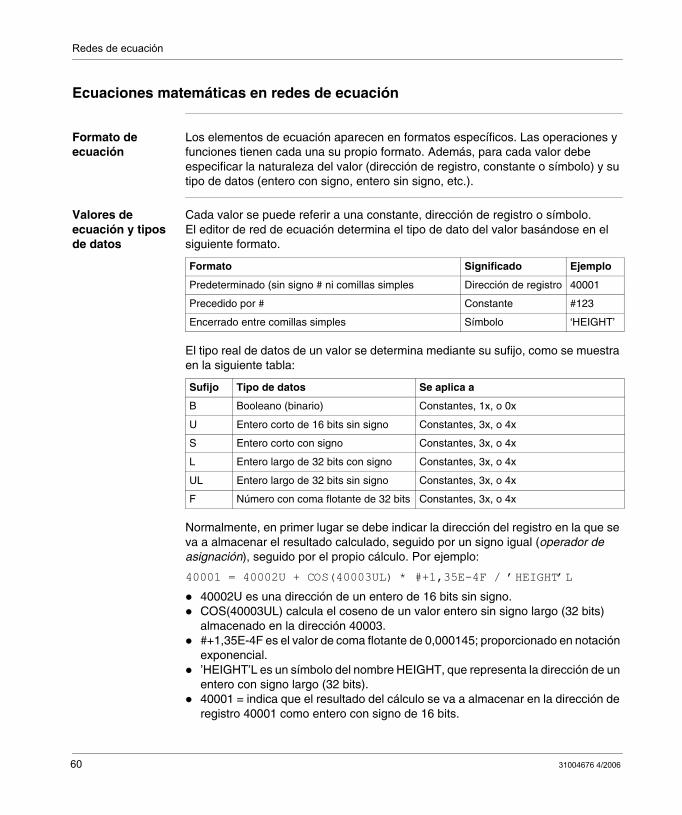
Redes de ecuación
Ecuaciones matemáticas en redes de ecuación
Formato de ecuación
Los elementos de ecuación aparecen en formatos específicos. Las operaciones y funciones tienen cada una su propio formato. Además, para cada valor debe especificar la naturaleza del valor (dirección de registro, constante o símbolo) y su tipo de datos (entero con signo, entero sin signo, etc.).
Valores de ecuación y tipos de datos
Cada valor se puede referir a una constante, dirección de registro o símbolo. El editor de red de ecuación determina el tipo de dato del valor basándose en el siguiente formato.
El tipo real de datos de un valor se determina mediante su sufijo, como se muestra en la siguiente tabla:
Normalmente, en primer lugar se debe indicar la dirección del registro en la que se va a almacenar el resultado calculado, seguido por un signo igual (operador de asignación), seguido por el propio cálculo. Por ejemplo:
40001 = 40002U + COS(40003UL) * #+1,35E-4F / ’HEIGHT’L
40002U es una dirección de un entero de 16 bits sin signo.COS(40003UL) calcula el coseno de un valor entero sin signo largo (32 bits) almacenado en la dirección 40003.#+1,35E-4F es el valor de coma flotante de 0,000145; proporcionado en notación exponencial.’HEIGHT’L es un símbolo del nombre HEIGHT, que representa la dirección de un entero con signo largo (32 bits).40001 = indica que el resultado del cálculo se va a almacenar en la dirección de registro 40001 como entero con signo de 16 bits.
Formato Significado Ejemplo
Predeterminado (sin signo # ni comillas simples Dirección de registro 40001
Precedido por # Constante #123
Encerrado entre comillas simples Símbolo ‘HEIGHT’
Sufijo Tipo de datos Se aplica a
B Booleano (binario) Constantes, 1x, o 0x
U Entero corto de 16 bits sin signo Constantes, 3x, o 4x
S Entero corto con signo Constantes, 3x, o 4x
L Entero largo de 32 bits con signo Constantes, 3x, o 4x
UL Entero largo de 32 bits sin signo Constantes, 3x, o 4x
F Número con coma flotante de 32 bits Constantes, 3x, o 4x
60 31004676 4/2006
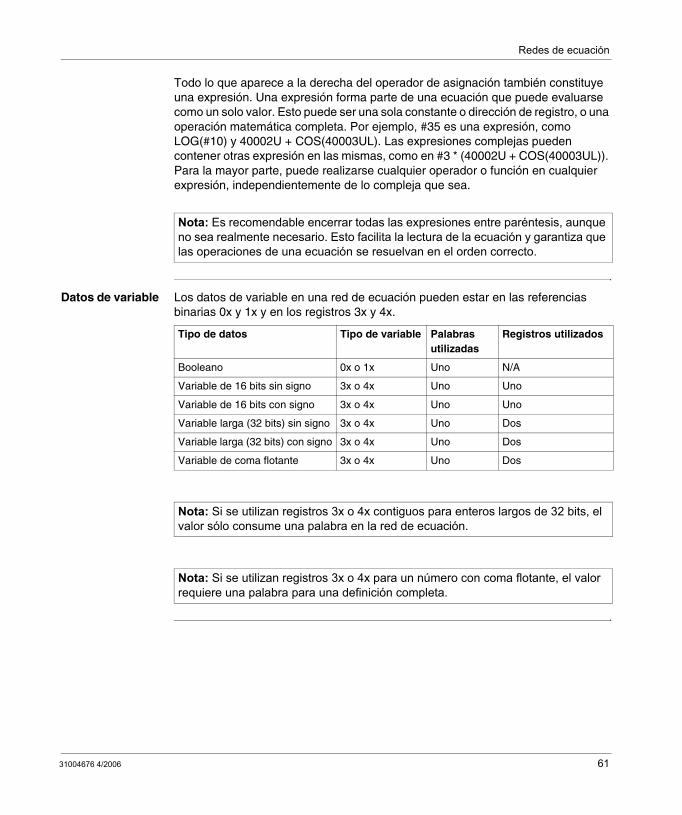
Redes de ecuación
Todo lo que aparece a la derecha del operador de asignación también constituye una expresión. Una expresión forma parte de una ecuación que puede evaluarse como un solo valor. Esto puede ser una sola constante o dirección de registro, o una operación matemática completa. Por ejemplo, #35 es una expresión, como LOG(#10) y 40002U + COS(40003UL). Las expresiones complejas pueden contener otras expresión en las mismas, como en #3 * (40002U + COS(40003UL)). Para la mayor parte, puede realizarse cualquier operador o función en cualquier expresión, independientemente de lo compleja que sea.
Datos de variable Los datos de variable en una red de ecuación pueden estar en las referencias binarias 0x y 1x y en los registros 3x y 4x.
Nota: Es recomendable encerrar todas las expresiones entre paréntesis, aunque no sea realmente necesario. Esto facilita la lectura de la ecuación y garantiza que las operaciones de una ecuación se resuelvan en el orden correcto.
Tipo de datos Tipo de variable Palabras utilizadas
Registros utilizados
Booleano 0x o 1x Uno N/A
Variable de 16 bits sin signo 3x o 4x Uno Uno
Variable de 16 bits con signo 3x o 4x Uno Uno
Variable larga (32 bits) sin signo 3x o 4x Uno Dos
Variable larga (32 bits) con signo 3x o 4x Uno Dos
Variable de coma flotante 3x o 4x Uno Dos
Nota: Si se utilizan registros 3x o 4x contiguos para enteros largos de 32 bits, el valor sólo consume una palabra en la red de ecuación.
Nota: Si se utilizan registros 3x o 4x para un número con coma flotante, el valor requiere una palabra para una definición completa.
31004676 4/2006 61

Redes de ecuación
Introducción de datos de variable en una red de ecuación
Al introducir referencias 0x o 1x como variables binarias en una red de ecuación, se asume que la referencia es booleana y que no necesita agregar el sufijo B a la referencia. Así, los enteros 000010 y 000010B son equivalentes.
Ningún otro sufijo está permitido con una referencia 0x o 1x.
Cuando se introduce un registro 3x o 4x en una red de ecuación, se aplican las siguientes reglas:
Datos de constante
Las constantes también se pueden utilizar para especificar datos en una red de ecuación. Las constantes largas (32 bits) y las constantes de coma flotante siempre requieren dos palabras. El byte menos significativo (LSB) es siempre la primera de las dos palabras. Ambas palabras deben tener el mismo tipo de datos.
Si introduce un registro. . Entonces .
sin sufijo Se asume que representa una variable de entero de 16 bits con signo. No es necesario agregar el sufijo S a la referencia. Así, los enteros 400023 y 400023S son equivalentes.
Con el sufijo U (por ejemplo, 300004U),
Indica que se utiliza un único registro que contiene una variable de entero de 16 bits sin signo.
Con el sufijo L Indica que se están utilizando dos registros continuos que contienen una variable de entero largo de 32 bits con signo (por ejemplo, 400012L implica que también se utiliza el registro 400013).
Con el sufijo UL Indica que se están utilizando dos registros continuos que contienen una variable de entero largo de 32 bits sin signo (por ejemplo, 300006UL implica que también se utiliza el registro 300007).
Con el sufijo F Indica que se están utilizando dos registros continuos que contienen una variable de coma flotante (por ejemplo, 400101F implica que también se utiliza el registro 400102).
Nota: No se puede agregar un registro 3x o 4x con el sufijo B.
Tipo de datos Palabras utilizadas Rango válido de valores
Booleano Uno 0, 1
Constante de 16 bits con signo Uno -32,768 ... +32,767
Constante de 16 bits sin signo Uno 0 ... 65,535
Constante larga (32 bits) con signo Dos -2 x 109 ... +2 x 109
Constante larga (32 bits) sin signo Dos 0 ... 4,294,967,295
Constante de coma flotante Dos 8,43 x 1037 ≤ |x| ≤ 3,402 x 1038
62 31004676 4/2006
Redes de ecuación
Introducción de datos de constante en una red de ecuación
Una constante está precedida de un signo # y seguida de un sufijo de tipo de datos (véase p. 60). Todos los valores de las constantes son en formato decimal. Los valores hexadecimales no están permitidos en ProWORX.
Si introduce una constante en una red de ecuación sin un sufijo, se asume que es un entero corto con signo. Así, los enteros #-3574 y #-3574S son equivalentes.
Una constante booleana debe tener el sufijo B. Las dos únicas constantes booleanas válidas son #0B y #1B. Ningún otro valor es una constante booleana permitida.
Notación exponencial
Los números de coma flotante se especifican generalmente en notación exponencial, tal y como se muestra a continuación:
+1,34E-4
Esto representa 1,35 veces 10 a la 4ª potencia o 1,35 veces 0,0001. De este modo, se puede desplazar la coma decimal cuatro posiciones a la izquierda para obtener 0,000135. La parte -4 se denomina exponente (observar la E precedente) y puede ser un número positivo o negativo.
En el editor de red de ecuación también se debe indicar lo siguiente:
Que estos números son constantes, ySus tipos de datos. Por ejemplo, números enteros o de coma flotante.
El tipo de datos predeterminado es un entero de 16 bits sin signo. De este modo, puesto que el valor anterior es una fracción (y por lo tanto debe ser un número de coma flotante), deberá aparecer como #+1,35E-4F.
Cuando no contienen ningún sufijo de tipo de datos, se considera que los números de una notación exponencial son enteros. Por ejemplo, #+1,35E+2 representa el valor entero de 16 bits 135. La notación exponencial es especialmente útil para enteros muy largos.
31004676 4/2006 63

Redes de ecuación
Operaciones matemáticas en redes de ecuación
Operaciones matemáticas
La siguiente tabla muestra las operaciones matemáticas que puede incluir en su ecuación:
Tipo Operador Resultado
Operador de asignaciónEl operador de asignación = se utiliza para asignar un lugar de almacenamiento para los resultados de la ecuación. Todas las ecuaciones utilizarán el operador de asignación. El formato es: DIRECCIÓN = EXPRESIÓN. Donde DIRECCIÓN es una dirección de registros válida y EXPRESIÓN es un valor o expresión válidos asignados a la dirección.
= Asignación
Operador unarioUnario significa único, de modo que los operadores unarios sólo se utilizan en un valor. El operador unario se sitúa justo antes del valor o expresión al que se aplica. Por ejemplo, -(30002) devuelve -1 vez el número almacenado en la dirección 30002.
- Negación. El resultado es -1 vez el valor.
~ Complemento de uno. Funciona en la representación binaria de un valor: todos los unos se cambian a ceros y viceversa.
Operador de exponenciaciónToma los valores de una potencia específica. 40001**3 devuelve el valor (entero) almacenado en 40001 y elevado a la tercera potencia.
** Exponenciación
Operador aritméticoÉstos requieren dos valores, uno antes del operador y otro después. Estos valores pueden ser cualquier expresión válida. Por ejemplo, #4 * 40003 da como resultado cuatro multiplicado por el valor almacenado en la dirección 40003.
* Multiplicación
/ División
+ Adición
- Substracción
64 31004676 4/2006

Redes de ecuación
Operador a nivel de bitLos operadores a nivel de bit funcionan en representaciones binarias de valores (base 2).
En el caso de AND, OR y XOR, el equipo aplica el operador a cada dígito en los dos valores: 010 XOR 011 (2 XOR 3 en números decimales) da como resultado 001 (1 en decimal).En el caso de operadores de intercambio, el equipo cambia todos los dígitos en la representación binaria del número; el número determinado de lugares a la izquierda o la derecha. Los dígitos situados a un lado del número se pierden y los ceros llenan los espacios en blanco al otro extremo. Por ejemplo, para números de 8 bits, 77 << 2 indica 01001101 desplazado dos dígitos a la izquierda. El resultado binario es 00110100 ó 52 decimal.
& AND. El resultado de bit único de una operación AND sólo es verdadero (1) si ambos bits se establecen en 1.
| OR. El resultado de bit único de una operación OR es verdadero (1) si cada bit se establece como 1. El resultado es falso (0) si ambos bits se establecen como 0.
^ XOR. Abreviatura de OR exclusivo. El resultado de bit único de una operación XOR sólo es falso (0) si ambos bits son el mismo; de lo contrario, será verdadero (1).
<< Desplazamiento a la izquierda. El resultado de 40001<<#2 es la representación binaria del número almacenado en 40001 desplazado dos posiciones a la izquierda (#2). Se agregan ceros a la derecha para llenar el hueco.
>> Desplazamiento a la derecha. El resultado de 40001>>#2 es la representación binaria del número almacenado en 40001 desplazado dos posiciones a la derecha (#2). Se agregan ceros a la izquierda para llenar el hueco.
Tipo Operador Resultado
31004676 4/2006 65

Redes de ecuación
Resolución de ecuaciones en una red de ecuación
Una red de ecuación calcula el resultado de una de las dos maneras, en función de los tipos de operador utilizados en la expresión.
Expresión única
Evalúa una única expresión y la ejecuta copiando el valor derivado al registro de resultados.
Expresión condicional
Evalúa la validez del primero de tres argumentos en una expresión condicional y la ejecuta copiando el valor del segundo o tercer argumento en la expresión condicional en el registro de resultados.
Si la expresión que se está evaluando contiene sólo una combinación de operadores unarios, de exponenciación, matemáticos y/o a nivel de bit lógicos, se trata como un único argumento y se resuelve mediante una expresión única. Por ejemplo, en la ecuación
400001 = (#16 ** #2 - #5) * #7
el cuadrado de 16 (256 (menos 5 (251)) se multiplica por 7 y el resultado (1,757) se copia al registro 400001.
Si utiliza uno o más de los seis operadores relacionales que se muestran en la tabla anterior, creará el primero de los tres argumentos que contiene una expresión condicional. Los operadores condicionales se deben utilizar para crear más argumentos en la expresión y la expresión condicional se utiliza para ejecutar el resultado. Por ejemplo, en la ecuación
400001 = 400002 >= #100 ? 300001 : 300002
Operador relacionalEstos operadores realizan una comparación entre dos valores o expresiones. El resultado es siempre verdadero (1) o falso (0). Por ejemplo, #35 <= #42 evalúa como 1 (verdadero). Los operadores relacionales se utilizan en expresiones condicionales.
< Menor que.
<= Menor o igual que.
= Igual que.
<> Diferente de.
=> Mayor o igual que.
> Mayor que.
Operador condicionalConsultar a continuación para obtener más información.
?: Utilizado en expresiones condicionales.
ParéntesisUtilizado para establecer prioridad para resolver ecuaciones. Para asegurarse de que ciertas operaciones se solucionen antes que otras, cierre las operaciones entre paréntesis.
()
Tipo Operador Resultado
66 31004676 4/2006

Redes de ecuación
el valor del registro 400002 se evalúa para ver si es superior a o igual a 100. Este es el primer argumento de la expresión condicional. Si el valor es superior a o igual a 100, se ejecuta el segundo argumento y el valor del registro 300001 se copia en el registro 400001. Si el valor es menor que 100, se ejecuta el tercer argumento y el valor del registro 300002 se copia en el registro 400001.
Prioridad de operador
En una cadena de tipos de datos y operadores, el orden o prioridad en la expresión determina el orden en el que se evaluarán las operaciones. Revise los siguientes ejemplos:
# Ecuación Comentarios
1 400001 = 300001F ** 300002F * 300003 + 300004 & 300005 > 300006 ? 300007 : 300008
Las operaciones en el primer argumento de la expresión condicional se evalúan de izquierda a derecha en el orden en que aparecen. En primer lugar, el valor del registro 300001 se eleva a la potencia del valor del registro 300002, a continuación se multiplica por el valor del registro 300003. El resultado se suma al valor del registro 300004, se aplica el operador AND con el valor del registro 300005 y se compara con el valor del registro 300006. Si la comparación > es verdadera, se ejecuta el segundo argumento de la expresión condicional y se copia el valor del registro 300007 en el registro 400001. Si la comparación > es falsa, se ejecuta el tercer argumento de la expresión condicional y el valor del registro 300008 se copia en el registro 400001.
2 400001 = 300002U > 300003U & 300004U + 300005F * 300006F ** 300007U ? 300008 : 300009
La prioridad del operador fuerza el efecto opuesto en el primer argumento de la expresión condicional.Aquí, la primera operación que se va a evaluar es la exponenciación del valor en el registro 300006 con el valor del registro 300007, seguido de la multiplicación por el valor en el registro 300005, a continuación se sumará el valor en el registro 300004, y se utilizará localmente el operador AND al resultado con el valor en el registro 300003. Por último, se comprobará el resultado con el valor en el registro 300002.Si la comparación > es verdadera, se ejecuta el segundo argumento de la expresión condicional y se copia el valor del registro 300008 en el registro 400001. Si la comparación > es falsa, se ejecuta el tercer argumento de la expresión condicional y el valor del registro 300009 se copia en el registro 400001. Cuando aparecen operadores con la misma prioridad en una expresión, normalmente se evalúan en el orden de izquierda a derecha y de arriba a abajo en la red de ecuación.
31004676 4/2006 67

Redes de ecuación
Utilización de paréntesis en una expresión de red de ecuación
Puede alterar el orden en que se evalúa una expresión cerrando partes de la expresión entre paréntesis. Las partes entre paréntesis de las expresiones se evalúan antes de las partes fuera de los paréntesis. Observe cómo se evalúan las siguientes expresiones con y sin paréntesis:
Paréntesis intercalados
Cuando varios niveles de datos entre paréntesis se encuentran en una expresión, se evalúa en primer lugar el paréntesis intercalado más profundamente. Una red de ecuación permite hasta 10 niveles de paréntesis intercalados en una expresión.
Por ejemplo, el orden en que se evalúa la segunda expresión anterior se puede ver de forma más clara cuando se utilizan los paréntesis.
300002U > ( 300003U & ( 300004U + ( 300005U * ( 300006F ** 300007F ) ) ) ) ? 300008 : 300009
Introducción de paréntesis en una red de ecuación
La red de ecuación le devolverá la expresión a medida que la introduce. No evita que introduzca niveles adicionales de paréntesis incluso cuando no sean necesarios para que la expresión sea sintácticamente correcta. Por ejemplo, en la expresión ( ( ( ( 300004U + 300005U ) ) ) ) / 300006U.
la red de ecuación mantiene los cuatro niveles intercalados de paréntesis en la expresión incluso cuando sólo se necesita un conjunto de paréntesis.
Cada par de signos de apertura y cierre de paréntesis utiliza dos palabras en la red de ecuación.
# Ecuación Comentarios
3 400001 = 300001U < 300002U | 300004U & 300001U + 300003U ? 300004 : 300005
Esta expresión se evalúa por la prioridad300001U < ( ( 300002U | 300004U ) & ( 300001U + 300003U ) ) ? 300005 : 300006donde a la suma de los valores en los registros 300001 y 300003 se utiliza el operador AND con el operador OR lógico de los valores en los registros 300002 y 300004.
4 400001 = 300001U < ( 300002U | 300004U & 300001U ) + 300003U ? 300004 : 300005
Esta expresión se evalúa con la utilización del operador OR a los valores en los registros 300002 y 300004, y aplicando el operador AND al resultado con el valor en el registro 300001, y por último agregando el valor en el registro 300003.
Nota: La expresión debe tener un número igual y equilibrado de signos de apertura y cierre de paréntesis para que se pueda compilar correctamente. En caso contrario, se generará un error de compilador y la red de ecuación no funcionará.
68 31004676 4/2006
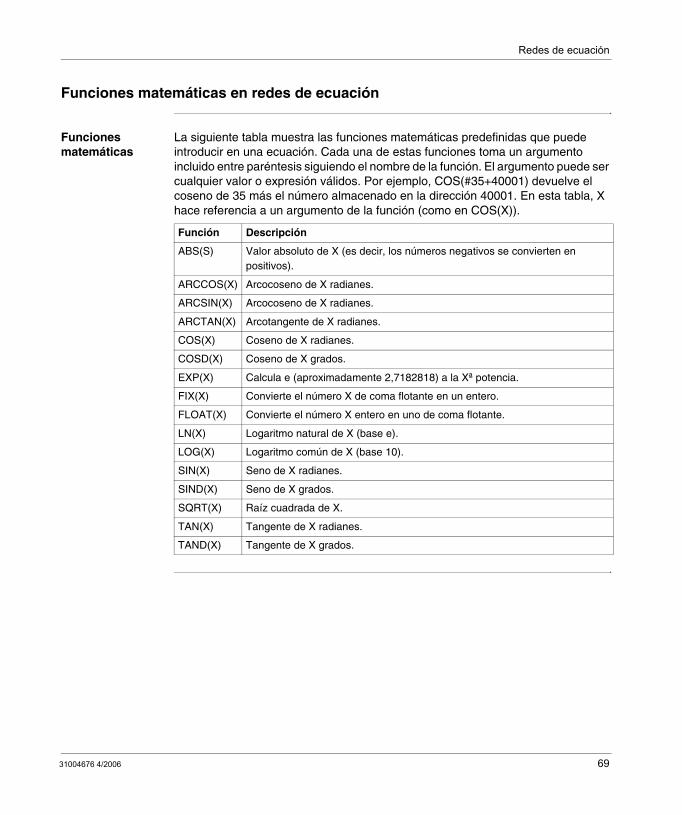
Redes de ecuación
Funciones matemáticas en redes de ecuación
Funciones matemáticas
La siguiente tabla muestra las funciones matemáticas predefinidas que puede introducir en una ecuación. Cada una de estas funciones toma un argumento incluido entre paréntesis siguiendo el nombre de la función. El argumento puede ser cualquier valor o expresión válidos. Por ejemplo, COS(#35+40001) devuelve el coseno de 35 más el número almacenado en la dirección 40001. En esta tabla, X hace referencia a un argumento de la función (como en COS(X)).
Función Descripción
ABS(S) Valor absoluto de X (es decir, los números negativos se convierten en positivos).
ARCCOS(X) Arcocoseno de X radianes.
ARCSIN(X) Arcocoseno de X radianes.
ARCTAN(X) Arcotangente de X radianes.
COS(X) Coseno de X radianes.
COSD(X) Coseno de X grados.
EXP(X) Calcula e (aproximadamente 2,7182818) a la Xª potencia.
FIX(X) Convierte el número X de coma flotante en un entero.
FLOAT(X) Convierte el número X entero en uno de coma flotante.
LN(X) Logaritmo natural de X (base e).
LOG(X) Logaritmo común de X (base 10).
SIN(X) Seno de X radianes.
SIND(X) Seno de X grados.
SQRT(X) Raíz cuadrada de X.
TAN(X) Tangente de X radianes.
TAND(X) Tangente de X grados.
31004676 4/2006 69

Redes de ecuación
Introducción de funciones en una red de ecuación
Una función matemática se debe introducir con su argumento de la siguiente manera en la expresión de la red de ecuación: Nombre de función (argumento)
donde el nombre de la función es uno de los que se muestran en la tabla anterior y el argumento se introduce entre paréntesis inmediatamente después del nombre de función. El argumento debe introducirse como se muestra a continuación:
Una o más operaciones unariasUna o más operaciones exponencialesUna o más operaciones de multiplicación/divisiónUna o más operaciones de suma/restaUna o más operaciones lógicasUna o más operaciones relacionalesCualquier combinación permitida de las operaciones anteriores
Por ejemplo, si desea calcular el valor absoluto del seno del número en el registro FP 400025 y colocar el resultado en el registro FP 400015, introduzca los siguientes datos en la red de ecuación: 400015F = ABS (SIN (400025F))
Consulte p. 64 para obtener más información sobre estas operaciones.
Limites en el argumento de una función
El argumento de una función en una red de ecuación se resuelve en un número de coma flotante (FP). El valor FP debe encontrarse en el siguiente intervalo, en función del tipo de función.
Función Argumento Rango
ABS Valor FP -3,402823 x 1038... +3,402823 x 1038
ARCCOS Valor FP -1.00000 ... +1.00000
ARCSIN Valor FP -1.00000 ... +1.00000
ARCTAN Valor FP -3,402823 x 1038... +3,402823 x 1038
COS Valor FP -3,402823 x 1038... +3,402823 x 1038
COSD Valor FP -3,224671 x 104... +3,224671 x 104
EXP Valor FP -87.33655 ... +88.72284
FIX Valor FP -2,147484 x 109... +2,147484 x 109
FLOAT Valor FP -3,402823 x 1038... +3,402823 x 1038
LN Valor FP 0 ... 3,402823 x 1038
LOG Valor FP 0 ... 3,402823 x 1038
SIN Valor FP -3,402823 x 1038... +3,402823 x 1038
SIND Valor FP -1,724705 x 104... +1,724705 x 104
SQRT Valor FP 0 ... 3,402823 x 1038
TAN Valor FP -3,402823 x 1038... +3,402823 x 1038, no p/2 x n (donde n es un valor entero)
TAND Valor FP -1,351511 x 104... +1,351511 x 104, no 90 x n (donde n es un valor entero)
70 31004676 4/2006

Redes de ecuación
Conversiones de datos en una red de ecuación
Tipos de datos mixtos en una red de ecuación
En una red de ecuación, algunas combinaciones de operadores convertirán el valor de un operando de un tipo de datos a otro. En una red de ecuación se aplican las siguientes reglas a los tipos de datos mezclados:
Todos los números con signo y sin signo de 16 bits se promocionan automáti-camente a 32 bits antes de una operación.En una operación entre número con signo y sin signo, se asume que el número sin signo tiene signo sin comprobar el desbordamiento.Una operación que implica un booleano y otro tipo de datos use el otro tipo de datos y asigna un valor de 1 ó 0 al booleano.Una operación entre números con coma flotante y números con signo o sin signo promociona automáticamente el entero largo a un número de coma flotante y asume que el número no tiene signo sin comprobar el desbordamiento.Una operación que implica los operadores lógicos a nivel de bit AND, OR oXOR no comprueba los tipos de datos y asume automáticamente números sin asignar.Una operación con los operadores lógicos a nivel de bit AND, OR o XOR con un argumento booleano da como resultado un 0 (falso) o un 0xFFFFFFFF (verdadero).La operación complementaria NOT ONE unaria no actúa sobre números con coma flotante y trata los números con signo como si no lo tuvieran.En una operación de desplazamiento hacia adelante o atrás, el número por el que se desplaza el argumento siempre se trata como un entero positivo entre 0 y 32. Si el valor del número es > 32 se utiliza automáticamente el operador AND con 0x1f para que sea < 32.Los números con signo se desplazan aritméticamente y los números sin signo se desplazan lógicamente.Un número de coma flotante que e desplaza no se puede utiliza ya que su tipo de dato no se modifica.El intento de desplazar un argumento booleano provoca un error.La negación unaria de un número sin signo provoca que dicho número sea complementario de 2.La negación unaria de un número con signo o de coma flotante provoca el cambio de signo de dicho número.La negación unaria de un operador booleano da como resultado un cambio del estado verdadero/falso del booleano.Una operación de valor absoluto no cambia el tipo de dato del resultado.El intento de encontrar el valor absoluto de un argumento booleano provoca un error.
31004676 4/2006 71

Redes de ecuación
Las funciones EXP, LN, LOG, SQRT, SIN, COS, TAN, SIND, COSD, TAND, ARCSIN, ARCCOS, o ARCTAN siempre producen un resultado de coma flotante. Si el argumento original no era un número de coma flotante, se promocionará a uno, asumiendo un número con signo sin comprobar el rebasamiento. La excepción es un argumento booleano original, que generará un error con cualquiera de estas funciones.Una operación booleano + booleano es una operación OR.Una operación booleano booleano es una operación XOR.Las operaciones booleano * booleano , booleano / booleano y booleano ** booleano son operaciones AND.Una asignación booleana (=) a un número con signo o sin él produce un 0 ó 1 con o sin signo.Una asignación booleana (=) a un número con coma flotante produce un 0,0 ó 1,0 de coma flotante.Una asignación de un número con/ sin signo largo/ corto (=) a un número corto sin signo produce un resultado en el rango de 0 a 65.535. El desbordamiento se define si el resultado es > 65.535.Una asignación de un número con/ sin signo largo/ corto (=) a un número corto con signo produce un resultado en el rango de –32.768 a 32,767. El desborda-miento se define si el resultado es > 32.767 o < -32.768.Una asignación de un número de coma flotante (=) a un número con/ sin signo largo/ corto se truncará.Una asignación de un número de coma flotante (=) a un número corto sin signo produce un resultado en el rango de 0 a 65,535. El desbordamiento se define si el resultado es > 65.535.Una asignación de un número de coma flotante (=) a un número corto con signo produce un resultado en el rango de -32,768 a 32,767. El desbordamiento se define si el resultado es > 32.767 o < -32.768.Una asignación de un número de coma flotante (=) a un número largo sin signo produce un resultado en el rango de 0 a 4,294,967,295. El desbordamiento se define si el resultado es > 4.294.967.295.Una asignación de un número de coma flotante (=) a un número largo con signo produce un resultado en el rango de -2,147,483,648 a 2,147,483,647. El desbordamiento se define si el resultado es > 2.147.483.647 o < -2.147.483.648.
72 31004676 4/2006

Redes de ecuación
Diferencias de redondeo en UC sin un coprocesador matemático
Descripción general
Los UC Quantum pueden ejecutar redes de ecuación como el 140 CPU 424 02 y 140 CPU 213 04, que tienen coprocesadores matemáticos en placa, así como los UC 140 CPU 113 02 y 03, que no tienen coprocesadores matemáticos. Los UC Quantum sin coprocesadores matemáticos utilizan un mecanismo de procesamiento de 32 bits dentro del UC para tratar los cálculos de coma flotante y pueden producir resultados que son menos precisos que los producidos por el coprocesador matemático de 80 bits.
Las diferencias de precisión se pueden notar al iniciar la sexta posición a la derecha de la coma decimal. Por ejemplo, el 140 CPU 424 02 y 213 04 calcularán la ecuación
401010F = SIN(#45)
y produce el resultado de 0,8509035, mientras que 140 CPU 113 02/03 tratará la misma ecuación y producirá el resultado de 0,8509022.
Para las aplicaciones que requieren una precisión superior a la 5ª posición decimal, se recomienda un UC Quantum con coprocesador matemático. Normalmente, si la aplicación no requiere este tipo de precisión, un UC sin coprocesador matemático es aceptable.
Cualquier cambio potencial es el efecto de un cálculo menos preciso en un resultado truncado. Por ejemplo, un UC con coprocesador matemático calculará la tangente de 225 grados
401015F = TAND(#225)
como 1, mientras que un UC sin un coprocesador matemático mostrará el resultado 0,999991. SI se va a asignar la operación TAND a un registro sin coma flotante, la red de ecuación truncará el resultado de forma que
401040 = TAND(#225)
generará un resultado de 1 cuando se utiliza el coprocesador matemático y un resultado de 0 cuando no se utiliza.
31004676 4/2006 73

Redes de ecuación
Rendimiento de referencia
Rendimiento de referencia
Se realizaron pruebas sobre 3 UC Quantum (CPU113, CPU213 y CPU424), resolviendo la misma ecuación con una operación de red de ecuación y operaciones EMTH en Ladder Logic. La ecuación era
A = ((B*C) + D - E / SINE F)
donde A, B, C, D, E y F son constantes o registros.
El siguiente gráfico muestra los tiempos de exploración de los 3 UC. Tenga en cuenta que el rendimiento EMTH en CPU113 y CPU213 es idéntico; esto es debido a que EMTH no utiliza el coprocesador matemático disponible en CPU213. EL rendimiento de la red de ecuación, que no utiliza un coprocesador matemático cuando está disponible, aumenta un 15 % en CPU213 con respecto a CPU113.
Nota: Esta ecuación fue la única Ladder Logic cargada en los UC Quantum para las pruebas de referencia.
Nota: El planteamiento de red de ecuación proporciona un resultado más preciso que la matemática interpolada implementada en operaciones EMTH.
Nota: Las operaciones de red de ecuación tienen incluso un mejor rendimiento con respecto a las operaciones EMTH a medida que las ecuaciones son más complejas.
0
1
2
3
4
5
6
Sin lógica
Lógica EMTH
Red de ecuación
CPU1130x CPU21304 CPU42402
74 31004676 4/2006

31004676 4/2006
7
Control de regulación de bucle cerrado/Valores analógicosPresentación
Introducción En este capítulo encontrará información general sobre la configuración del control de regulación de bucle cerrado y la utilización de valores analógicos.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Control de regulación de bucle cerrado/Valores analógicos 76
Subfunciones de PCFL 77
Ejemplo de PID 81
Ejemplo de control de nivel con PID2 84
75

Control de regulación de bucle cerrado/Valores analógicos
Control de regulación de bucle cerrado/Valores analógicos
Generalidades En un sistema de control de regulación de bucle cerrado, cualquier desviación respecto al estado ideal del proceso se mide, analiza y ajusta para intentar obtener y mantener un nivel de error cero en el estado del proceso. El conjunto de instrucciones avanzadas incluye un bloque de función proporcional-integral-derivada denominado PID2, que permite establecer un control de regulación de bucle cerrado (o realimentación negativa) en Ladder Logic.
Definición de variable de valor de consigna y de proceso
El punto de control deseado (error cero), que se define en el bloque PID2, se denomina valor de consigna (SP). La medición condicional efectuada con respecto al valor de consigna se denomina variable de proceso (PV). La diferencia entre SP y PV es la desviación o error (E). E se introduce en un cálculo de control cuyo resultado es una variable manipulada (Mv) que se utiliza para ajustar el proceso de forma que PV = SP (y, por tanto, E = 0).
ControlEnd Device
ControlCalculation
Process
Mv(Output)
ProcessTransmitter
PV
PV (Input)
SPE
+
_
76 31004676 4/2006

Control de regulación de bucle cerrado/Valores analógicos
Subfunciones de PCFL
Generalidades La instrucción PCFL permite acceder a una biblioteca de funciones de regulación de procesos utilizando valores analógicos.
Las operaciones PCFL se encuadran en tres categorías principales.Cálculos avanzadosProcesamiento de señalesControl de regulación
Cálculos avanzados
Los cálculos avanzados tienen una utilidad matemática general y no están limitados a las aplicaciones de regulación de procesos. Con los cálculos avanzados se pueden crear algoritmos personalizados de procesamiento de señales, derivar estados del proceso controlado, derivar medidas estadísticas del proceso, etc.
Las rutinas matemáticas simples ya se han indicado en la instrucción EMTH. La función de cálculo incluida en PCFL consiste en una calculadora textual de ecuaciones para escribir ecuaciones personalizadas en lugar de programar una serie de operaciones matemáticas una a una.
Procesamiento de señales
Las funciones de procesamiento de señales se utilizan para manipular procesos y señales de procesos derivadas. Para ello utilizan diferentes métodos: linealizar la señal, filtrarla, retardarla o modificarla de alguna otra forma. Esta categoría incluiría funciones como entrada/salida analógica, limitadores, filtro diferenciador o de retardo y generadores de rampa.
Control de regulación
Las funciones de regulación efectúan un control de bucle cerrado en diversas aplicaciones. Normalmente, se trata de un bucle de control de realimentación negativa de PID (proporcional integral derivada). Las funciones PID en PCFL tienen diversos grados de funcionalidad. La función PID tiene la misma funcionalidad general que la instrucción PID2, pero utiliza matemática de coma flotante y representa algunas opciones de forma diferente. PID es útil en los casos en los que la instrucción PID2 no es apropiada debido a circunstancias numéricas, como el redondeo.
Explicación de los elementos de fórmula
Significado de los elementos de fórmula en las siguientes fórmulas.
Elementos de fórmula Significado
Y Salida de variable manipulada
YP Parte proporcional del cálculo
YI Parte integral del cálculo
YD Parte diferencial del cálculo
31004676 4/2006 77

Control de regulación de bucle cerrado/Valores analógicos
Ecuaciones generales
Las siguientes ecuaciones generales son válidas.
Cálculos proporcionales
Las siguientes ecuaciones son válidas.
Bias Constante añadida a la entrada
BT Registro de transferencia sin perturbaciones
SP Valor de consigna
KP Ganancia proporcional
Dt Tiempo desde el último ciclo
TI Constante de tiempo de acción de integral
TD Constante de tiempo de componente diferencial
TD1 Tiempo de retardo diferencial
XD Término de error, desviación
XD_1 Término de error anterior
X Entrada de proceso
X_1 Entrada de proceso anterior
Elementos de fórmula Significado
Ecuación Estado/Requisito
Bit integral activo
Bit integral inactivo
Límites superior e inferior
con
Reducción de ganancia
Zona de reducción de ganancia sin utilizar
Y YP YI YD BIAS+ + +=
Y YP YD BIAS BT+ + +=
Yhigh Y Ylow≤ ≤
YP YI YD f XD( )=, ,
XD SP X GRZ 1 KGRZ–( )×( )±–=
XD SP X–=
Ecuación Estado/Requisito
Bit proporcional activoYP KP XD×=
YP 0=
78 31004676 4/2006

Control de regulación de bucle cerrado/Valores analógicos
Cálculo integral Las siguientes ecuaciones son válidas.
Cálculo diferencial
Las siguientes ecuaciones son válidas.
Ecuación Estado/Requisito
Bit integral activoYI YI KP
ΔtTI------ XD_1 XD+
2------------------------------××+=
YI 0=
Ecuación Estado/Requisito
Derivada base o variable de proceso (PV)
Bit diferencial activo
DXD X_1 X–=
DXD XD X_1–=
YD TD1 YD×( ) TD KP× DXD×( )+Δt TD1+
-------------------------------------------------------------------------------------=
YD 0=
31004676 4/2006 79

Control de regulación de bucle cerrado/Valores analógicos
Diagrama de estructura
1
0
GAIN
b)
1
0
- GAIN
c)
a)
Y (n)
b)
a)
c)
HIGH
LOW
ManualAutomatic
Halt
+
_
SET POINTSP
CONTROLINPUT
X(n)
1 = PROPORTION ON
PROPORTIONAL
Anti-Windup-Reset CONTROL DEVIATION
0
1
1 = INTEGRAL ON
0 = base Derivative on XD1 = base Derivative on X
1
0
0
1
1 = DERIVATIVE ON
INTEGRALTI
P+I+D
DERVATIVETD
Contributions
SUMMINGJUNCTION
+
Anti-Windup-Limits OPERATINGMODES
CONTROLOUTPUT
MODE SELECT
80 31004676 4/2006

Control de regulación de bucle cerrado/Valores analógicos
Ejemplo de PID
Descripción Este ejemplo explica cómo configurar un bucle PID típico utilizando la función PID de PCFL. El cálculo empieza con la función AIN, que toma una entrada bruta simulada para hacer que la salida se encuentre aproximadamente entre 20 y 22 si la escala de unidades físicas está establecida entre 0 y 100.
Diagrama de Ladder Logic LL984.
La variable de proceso, después de un periodo de tiempo, debe parecerse a la siguiente gráfica.
# 3
T0.1
400185
AIN
PCFL
400100
# 14
LKUP
PCFL
400120
# 39
RAMP
PCFL
400160
# 14
MODE
PCFL
400190
# 8
PID
PCFL
400200
# 44
AOUT
PCFL
400250
# 9
000100
400112
BLKM
400120
# 2
400157
BLKM
400200
# 2
400172
BLKM
400190
# 2
400196
BLKM
400206
# 2
400242
BLKM
400250
# 2
000100
Time
Process Variable Value
20
22
31004676 4/2006 81

Control de regulación de bucle cerrado/Valores analógicos
Ladder Logic del PID principal
La salida AIN se mueve en bloque a la función LKUP, que se utiliza para escalar la señal de entrada. Esto se hace porque el captador de entrada no proporciona lecturas altamente lineares; el resultado es una señal linear ideal.
La salida de la tabla de linealización por interpolación se mueve en bloque a la función PID. RAMP se utiliza para controlar el ascenso (o descenso) del valor de consigna del controlador PID en lo que se refiere a la pendiente de rampa y al intervalo de resolución. En este ejemplo, el valor de consigna se establece en otra sección lógica para simular una configuración remota. La función MODE se sitúa detrás de RAMP, para poder así cambiar entre el valor de consigna generado por RAMP y un valor manual.
Proceso simulado
La función PID controla el proceso simulado por esta lógica [valor en 400100: 878(dec.)].
7 Points DefinedIn Look Up table
Input0
100
80
60
50
40
20
1008060504020
Linearized Signal
Actual Input
*
*
*
**
*
# 3
T0.1
400188
LLAG
PCFL
400260
# 20
LLAG
PCFL
400280
# 20
DELAY
PCFL
400300
# 32
AOUT
PCFL
400340
# 9
000103
000103
400278
BLKM
400280
# 1
400298
BLKM
400300
# 1
400330
BLKM
400340
# 1
400348
BLKM
400100
# 1
000103400242
BLKM
400260
# 1
82 31004676 4/2006

Control de regulación de bucle cerrado/Valores analógicos
El simulador de procesos está formado por dos funciones LLAG que actúan como filtro y entrada de una cola DELAY, que también es un módulo de función de PCFL. Esta disposición es el equivalente de un proceso de segundo orden con tiempo muerto.
Los intervalos de resolución para los filtros LLAG no afectan a la dinámica del proceso y se han elegido para conseguir actualizaciones rápidas. El intervalo de resolución de la cola DELAY está establecido en 1.000 ms con un retardo de 5 intervalos, es decir, 5 s. Cada filtro LLAG dispone de constantes de tiempo de diferenciación de 4 s y de tiempo de retardo de 10 s. La ganancia para cada uno es 1,0.
En términos de regulación del proceso, la función de transferencia se puede expresar como:
La función AOUT sólo se utiliza para convertir el valor simulado de control de salida del proceso en un rango de 0 a 4.095, lo cual simula un sensor. Esta señal entera se utiliza como la entrada del proceso en la primera red.
Parámetros PID El controlador PID está ajustado para controlar este proceso a 20,0, utilizando el método de ajuste Ziegler-Nichols. La ganancia del controlador resultante es 2,16; esto equivale a una banda proporcional del 46,3%.
El tiempo de integración está ajustado a 12,5 s/repetición (4,8 repeticiones/minuto). Inicialmente, el tiempo diferencial es 3 s, después se reduce a 0,3 s para desacentuar el efecto diferencial.
Después de PID se utiliza una función AOUT. Ésta condiciona la salida de control de PID escalando la señal de nuevo a un entero que se utilizará como valor de control.
Todo el bucle de control está precedido por un temporizador de 0,1 s. El intervalo de resolución de destino para todo el bucle es 1 s, al igual que el ciclo entero. Sin embargo, no es necesario ejecutar en cada ciclo las funciones que no dependen del tiempo (AIN, LKUP, MODE y AOUT). Para reducir el impacto del tiempo de ciclo, estas funciones están programadas para ejecutarse con menor frecuencia. El ejemplo tiene un ciclo de bucle de 3 s, lo que reduce considerablemente el tiempo de ciclo medio.
Gp S( ) 4S 1+( ) 4S 1+( )e5S–
10S 1+( ) 10S 1+( )-----------------------------------------------------=
Nota: Es importante conocer el impacto de ciclo máximo. Al programar otros bucles, probablemente no deseará que se ejecuten todos los bucles en el mismo ciclo.
31004676 4/2006 83

Control de regulación de bucle cerrado/Valores analógicos
Ejemplo de control de nivel con PID2
Descripción A continuación se muestra un diagrama de flujo simplificado para un separador de entrada en una planta de procesamiento de gas. El flujo de entrada consta de dos fases: líquido y gas.
LT-1 Transmisor de nivel de 4 a 20 mAI/P-1 Convertidor de corriente a neumático de 4 a 20 mALV-1 Válvula de control, CERRADA en caso de falloLSH-1 Conmutador de nivel superior, normalmente cerradoLSL-1 Conmutador de nivel inferior, normalmente abiertoLC-1 Controlador de nivelI/P-1 Mv para controlar el flujo que va al tanque T-1
El líquido sale del tanque para mantener un nivel constante. El objetivo del control es precisamente mantener un nivel constante en el separador. Las fases deben separarse antes del procesamiento; de ello se encarga el separador de entrada, PV-1. Si el controlador de nivel, LC-1, falla al realizar su trabajo, el separador de entrada podría llenarse, haciendo que los líquidos entren en contacto con el flujo de gas; esta situación podría dañar seriamente algunos dispositivos, como por ejemplo compresores de gas.
PlantInlet
FCVInlet Block
Inlet Vent
VentBlowdown
GasLSH1
LSL1
PV-1
FC
Condensate
LV
LT1
LC1
I/P1
84 31004676 4/2006

Control de regulación de bucle cerrado/Valores analógicos
Diagrama de Ladder Logic
El nivel se controla por medio del dispositivo LC-1, un controlador Quantum conectado a un módulo de entrada analógica; I/P-1 está conectado a un módulo de salida analógica. Es posible ejecutar el bucle de control con la siguiente Ladder Logic 984.
El primer bloque SUB se utiliza para mover la entrada analógica desde LT-1 al registro de entrada analógico del PID2, 40113. El segundo bloque SUB se utiliza para mover la Mv de salida del PID2 a la salida I/P-1 de la asignación de E/S. La bobina 00101 se utiliza para cambiar el bucle de modo AUTOMÁTICO a MANUAL, si así se desea. Para el modo AUTOMÁTICO, debe estar en la posición ACTIVO.
Contenido de los registros
Determine el valor de consigna en mm para la proporción de entrada (unidades físicas). El rango de entrada total va de 0 a 4.000 mm (para valores analógicos brutos de 0 a 4.095). Determine el contenido del asiento superior en el bloque PID2 del siguiente modo.
000102
000101400100
PID2
400200
# 30
400102
SUB
#0
400500
300001
SUB
#0
400113
000103
Registro Contenido numérico Significado del contenido Comentarios
400100 Variable manipulada escalada (mm)
PID2 se encarga de escribirlo.
400101 2000 Valor de consigna escalado (mm)
Establecido inicialmente en 2.000 mm (mitad).
400102 0000 Salida de bucle (0 a 4.095) PID2 se encarga de escribirlo; manténgalo en 0 por razones de seguridad.
400103 3500 Valor de consigna de alarma alto (mm)
Si el nivel sobrepasa 3.500 mm, la bobina 000102 se activa.
31004676 4/2006 85

Control de regulación de bucle cerrado/Valores analógicos
400104 1000 Valor de consigna de alarma bajo (mm)
Si el nivel baja de 1.000 mm, la bobina 000103 se activa.
400105 0100 PB (%) El valor real depende de la dinámica del proceso.
400106 0500 Constante integral (5,00 repeticiones por minuto)
El valor real depende de la dinámica del proceso.
400107 0000 Constante de tiempo de crecimiento (por minuto)
Si se establece en 0, el modo diferencial se desactiva.
400108 0000 Bias (0 a 4.095) Se establece en 0, ya que disponemos de un componente integral.
400109 4095 Límite superior de windup (0 a 4.095)
Normalmente está establecido en el máximo.
400110 0000 Límite inferior de windup (0 a 4.095)
Normalmente está establecido en el mínimo.
400111 4000 Rango físico superior (mm) Valor escalado de la variable de proceso cuando la entrada bruta está en 4.095.
400112 0000 Rango físico inferior (mm) Valor escalado de la variable de proceso cuando la entrada bruta está en 0.
400113 Medición de valor analógico bruto (0 a 4.095)
Copia de la entrada desde el registro del módulo de entrada analógica (300001) realizada por el primer SUB.
400114 0000 Offset al registro del contador de bucles
El valor cero desactiva esta función.Normalmente no se utiliza.
400115 0000 Número máximo de bucles ejecutados por ciclo
Véase el registro 400114.
Registro Contenido numérico Significado del contenido Comentarios
86 31004676 4/2006
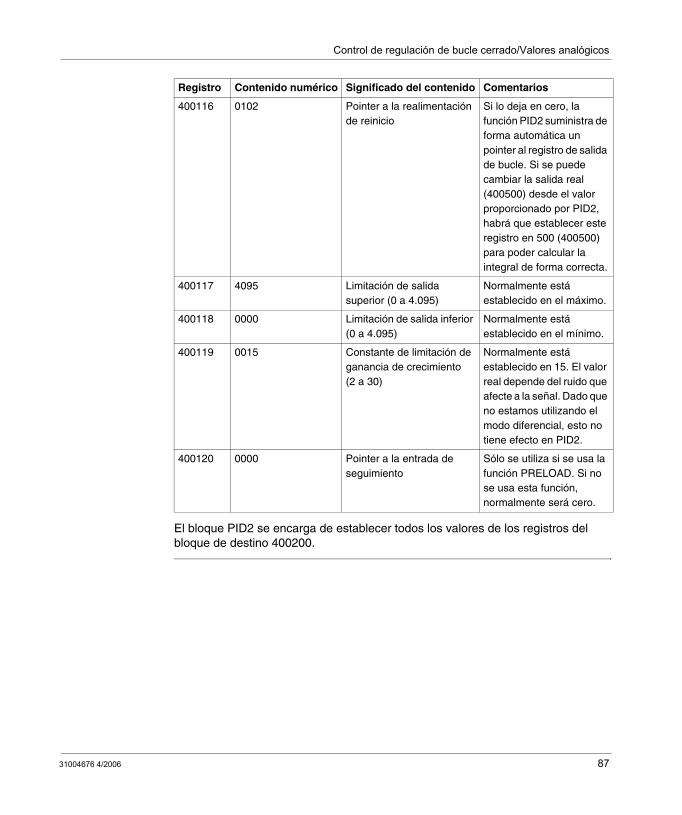
Control de regulación de bucle cerrado/Valores analógicos
El bloque PID2 se encarga de establecer todos los valores de los registros del bloque de destino 400200.
400116 0102 Pointer a la realimentación de reinicio
Si lo deja en cero, la función PID2 suministra de forma automática un pointer al registro de salida de bucle. Si se puede cambiar la salida real (400500) desde el valor proporcionado por PID2, habrá que establecer este registro en 500 (400500) para poder calcular la integral de forma correcta.
400117 4095 Limitación de salida superior (0 a 4.095)
Normalmente está establecido en el máximo.
400118 0000 Limitación de salida inferior (0 a 4.095)
Normalmente está establecido en el mínimo.
400119 0015 Constante de limitación de ganancia de crecimiento (2 a 30)
Normalmente está establecido en 15. El valor real depende del ruido que afecte a la señal. Dado que no estamos utilizando el modo diferencial, esto no tiene efecto en PID2.
400120 0000 Pointer a la entrada de seguimiento
Sólo se utiliza si se usa la función PRELOAD. Si no se usa esta función, normalmente será cero.
Registro Contenido numérico Significado del contenido Comentarios
31004676 4/2006 87

Control de regulación de bucle cerrado/Valores analógicos
88 31004676 4/2006

31004676 4/2006
8
Mensajes formateados para operaciones ASCII READ/WRITPresentación
Introducción En este capítulo encontrará información general sobre cómo formatear mensajes para las operaciones ASCII READ/WRIT.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Mensajes formateados para operaciones ASCII READ/WRIT 90
Especificaciones de formato 91
Consideraciones especiales de instalación para formato de señales de control/vigilancia
94
89

Mensajes formateados para operaciones ASCII READ/WRIT
Mensajes formateados para operaciones ASCII READ/WRIT
Generalidades Los mensajes ASCII utilizados en las instrucciones READ y WRIT se pueden crear por medio del software de panel, utilizando las especificaciones de formato que se describen a continuación. Las especificaciones de formato son símbolos de caracteres que indican.
Los caracteres ASCII utilizados en el mensajeEl contenido del registro visualizado en formato de caracteres ASCIIEl contenido del registro visualizado en formato hexadecimalEl contenido del registro visualizado en formato enteroLlamadas de la subrutina para ejecutar otros formatos de mensaje
Vista general de especifica-ciones de formato
Se pueden utilizar las siguientes especificaciones de formato.
Especificación Significado
/ Retorno ASCII (CR) y cambio de línea (LF)
" " Cercamiento para el código de control octal
‘ ´ Cercamiento para caracteres de texto ASCII
X Indicador de espacio
() Se repite el contenido de los paréntesis
I Entero
L Ceros no significativos
A Alfanumérico
O Octal
B Binario
H Hexadecimal
90 31004676 4/2006

Mensajes formateados para operaciones ASCII READ/WRIT
Especificaciones de formato
Especificación de formato /
Retorno ASCII (CR) y cambio de línea (LF).
Especificación de formato " "
Cercamiento para el código de control octal.
Especificación de formato ‘ ´
Cercamiento para caracteres de texto ASCII.
Especificación de formato X
Indicador de espacio; por ejemplo, 14X indica 14 espacios vacíos hacia la izquierda desde el punto en que tiene lugar la especificación.
Ancho de campo Ninguno (predeterminado a 1).
Prefijo Ninguno (predeterminado a 1).
Formato de entrada Salidas CR, LF; no se aceptan caracteres ASCII.
Formato de salida Salidas CR, LF.
Ancho de campo Tres dígitos cercados por comillas dobles.
Prefijo Ninguno.
Formato de entrada Acepta tres caracteres de control octal.
Formato de salida Emite tres caracteres de control octal.
Ancho de campo 1 a 128 caracteres.
Prefijo Ninguno (predeterminado a 1).
Formato de entrada Recibe el número de caracteres imprimibles en mayúscula/minúscula especificado en el ancho de campo.
Formato de salida Transmite el número de caracteres imprimibles en mayúscula/minúscula especificado en el ancho de campo.
Ancho de campo Ninguno (predeterminado a 1).
Prefijo 1 a 99 espacios.
Formato de entrada Recibe el número de espacios especificado.
Formato de salida Transmite el número de espacios especificado.
31004676 4/2006 91
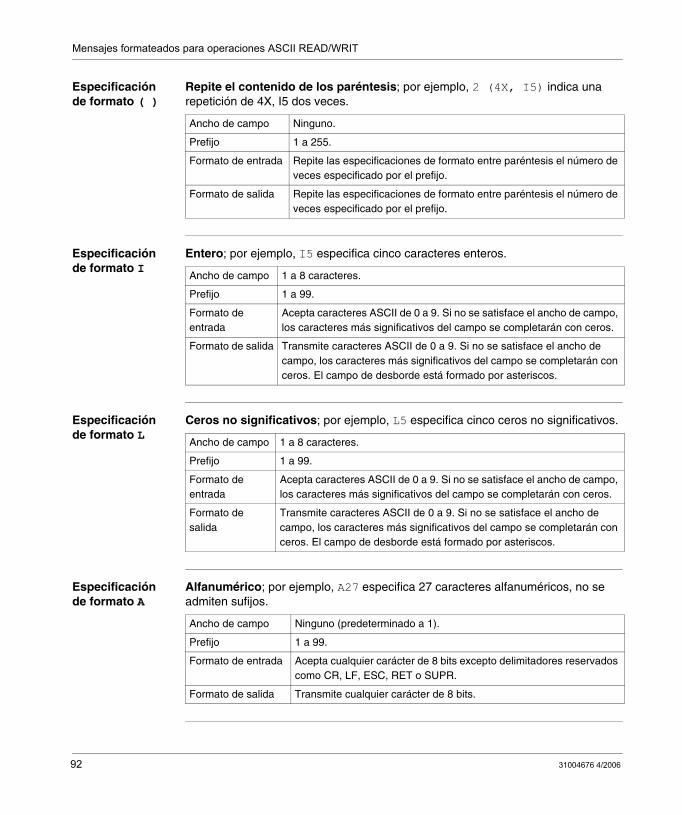
Mensajes formateados para operaciones ASCII READ/WRIT
Especificación de formato ( )
Repite el contenido de los paréntesis; por ejemplo, 2 (4X, I5) indica una repetición de 4X, I5 dos veces.
Especificación de formato I
Entero; por ejemplo, I5 especifica cinco caracteres enteros.
Especificación de formato L
Ceros no significativos; por ejemplo, L5 especifica cinco ceros no significativos.
Especificación de formato A
Alfanumérico; por ejemplo, A27 especifica 27 caracteres alfanuméricos, no se admiten sufijos.
Ancho de campo Ninguno.
Prefijo 1 a 255.
Formato de entrada Repite las especificaciones de formato entre paréntesis el número de veces especificado por el prefijo.
Formato de salida Repite las especificaciones de formato entre paréntesis el número de veces especificado por el prefijo.
Ancho de campo 1 a 8 caracteres.
Prefijo 1 a 99.
Formato de entrada
Acepta caracteres ASCII de 0 a 9. Si no se satisface el ancho de campo, los caracteres más significativos del campo se completarán con ceros.
Formato de salida Transmite caracteres ASCII de 0 a 9. Si no se satisface el ancho de campo, los caracteres más significativos del campo se completarán con ceros. El campo de desborde está formado por asteriscos.
Ancho de campo 1 a 8 caracteres.
Prefijo 1 a 99.
Formato de entrada
Acepta caracteres ASCII de 0 a 9. Si no se satisface el ancho de campo, los caracteres más significativos del campo se completarán con ceros.
Formato de salida
Transmite caracteres ASCII de 0 a 9. Si no se satisface el ancho de campo, los caracteres más significativos del campo se completarán con ceros. El campo de desborde está formado por asteriscos.
Ancho de campo Ninguno (predeterminado a 1).
Prefijo 1 a 99.
Formato de entrada Acepta cualquier carácter de 8 bits excepto delimitadores reservados como CR, LF, ESC, RET o SUPR.
Formato de salida Transmite cualquier carácter de 8 bits.
92 31004676 4/2006

Mensajes formateados para operaciones ASCII READ/WRIT
Especificación de formato O
Octal; por ejemplo, O2 especifica dos caracteres octales.
Especificación de formato B
Binario; por ejemplo, B4 especifica cuatro caracteres binarios.
Especificación de formato H
Hexadecimal; por ejemplo, H2 especifica dos caracteres hexadecimales.
Ancho de campo 1 a 6 caracteres.
Prefijo 1 a 99.
Formato de entrada Acepta caracteres ASCII de 0 a 7. Si no se satisface el ancho de campo, los caracteres más significativos se completarán con ceros.
Formato de salida Transmite caracteres ASCII de 0 a 7. Si no se satisface el ancho de campo, los caracteres más significativos se completarán con ceros. No hay indicadores de desborde.
Ancho de campo 1 a 16 caracteres.
Prefijo 1 a 99.
Formato de entrada Acepta caracteres ASCII 0 y 1. Si no se satisface el ancho de campo, los caracteres más significativos se completarán con ceros.
Formato de salida Transmite caracteres ASCII 0 y 1. Si no se satisface el ancho de campo, los caracteres más significativos se completarán con ceros. No hay indicadores de desborde.
Ancho de campo 1 a 4 caracteres.
Prefijo 1 a 99.
Formato de entrada Acepta caracteres ASCII de 0 a 9 y de A a F. Si no se satisface el ancho de campo, los caracteres más significativos se completarán con ceros.
Formato de salida Transmite caracteres ASCII de 0 a 9 y de A a F. Si no se satisface el ancho de campo, los caracteres más significativos se completarán con ceros. No hay indicadores de desborde.
31004676 4/2006 93

Mensajes formateados para operaciones ASCII READ/WRIT
Consideraciones especiales de instalación para formato de señales de control/vigilancia
Generalidades Para controlar y supervisar las señales utilizadas en la comunicación por mensajes, especifique el código 1002 en el primer registro del bloque de control (el registro que aparece en el asiento superior). Mediante este formato podrá controlar las líneas RTS y CTS en el puerto que se utilice para la transmisión de mensajes.
Los tres primeros registros del bloque de datos (el registro visualizado y el primer y segundo implícitos del asiento intermedio) tienen un contenido predeterminado.
Estos tres registros del bloque de datos son necesarios para este formato y, en consecuencia, el rango permitido para los valores de longitud (especificado en el asiento inferior) será de 3 a 255.
Palabra de la máscara de control
Utilización de la palabra.
Nota: En este formato, sólo se puede utilizar el puerto local para la transmisión de mensajes, es decir, un PLC primario no podrá supervisar o controlar las señales de un puerto secundario. Por lo tanto, el número de puerto especificado en el quinto asiento implícito del bloque de control siempre deberá ser 1.
Registro Contenido
Visualizado Guarda la palabra de la máscara de control
Primer implícito Guarda la palabra de datos de control
Segundo implícito Guarda la palabra de estado
Bit Función
1 1 = se puede utilizar el puerto0 = no se puede utilizar el puerto
2 - 15 No utilizados
16 1 = controlar RTS0 = no controlar RTS
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
94 31004676 4/2006

Mensajes formateados para operaciones ASCII READ/WRIT
Palabra de datos de control
Utilización de la palabra.
Palabra de estado
Utilización de la palabra.
Bit Función
1 1 = utilizar puerto0 = devolver puerto
2 - 15 No utilizados
16 1 = activar RTS0 = desactivar RTS
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Bit Función
1 1 = puerto utilizado
2 1 = puerto activo como slave Modbus
3 - 13 No utilizados
14 1 = DSR activo
15 1 = CTS activo
16 1 = RTS activo
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
31004676 4/2006 95

Mensajes formateados para operaciones ASCII READ/WRIT
96 31004676 4/2006
31004676 4/2006
9
Coils, Contacts e InterconnectsPresentación
Introducción En este capítulo encontrará información sobre Coils (bobinas), Contacts (contactos) e Interconnects (interconexiones), también denominadas Shorts (conexiones). Los datos de todos los elementos del conjunto de instrucciones de Ladder Logic se enumeran en orden alfabético.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Coils 98
Contacts 100
Interconnects (Shorts) 102
97

Coils, Contacts e Interconnects
Coils
Definición de bobina
Una bobina es una salida binaria que se activa y desactiva según el flujo de señal en el programa lógico. Una bobina simple se vincula con una referencia 0x de la memoria de señal del PLC. Debido a que los valores de salida se actualizan en la memoria de señal del PLC, se puede usar una bobina de forma interna en el programa lógico, o de forma externa a través de la asignación de E/S con una unidad de salida binaria en el sistema de control. Cuando una bobina esté activa, transferirá señal a un circuito de salida binaria o cambiará el estado de un contacto de relé interno de la memoria de señal.
Existen dos tipos de bobinas.Bobinas normalesBobinas retentivas de memoria o con retención
Bobina normal Una bobina normal es una salida binaria que se muestra como una referencia 0x.
Una bobina normal se encuentra activa o inactiva, dependiendo del flujo de señal en el programa.
Una red de Ladder Logic puede contener hasta siete bobinas, no más de una por fila. Cuando se ubique una bobina en una fila, no podrán aparecer otros elementos lógicos o asientos de instrucciones a la derecha de la posición de ejecución de lógica que ocupa la bobina en esa fila. Las bobinas son los únicos elementos de Ladder Logic que se pueden insertar en la columna 11 de una red.
Para definir una referencia binaria para la bobina, selecciónela en el editor y haga clic para abrir un cuadro de diálogo llamado Coil.
Símbolo
98 31004676 4/2006

Coils, Contacts e Interconnects
Bobina retentiva
Si se activa una bobina retentiva (con retención) cuando el PLC pierde su alimentación, la bobina volverá en el mismo estado durante un ciclo al restablecer la alimentación.
Para definir una referencia binaria para la bobina, selecciónela en el editor y haga clic para abrir un cuadro de diálogo llamado Retentative coil (latch).
Símbolo
Forzado de bobinasCuando se desactiva una entrada binaria (1x), las señales procedentes del sensor de entrada asociado no tienen control sobre su estado activo/inactivo. Cuando se desactiva una salida binaria (0x), el ciclo lógico del PLC no tiene control sobre el estado activo/inactivo de la salida. Después de desactivar una entrada o salida binaria, podrá cambiar su estado activo o inactivo con el comando Forzar.Existe una excepción importante cuando se desactivan las bobinas. Las instrucciones de movimiento de datos y matriz de datos, que utilizan bobinas en sus asientos de destino, reconocen el estado activo/inactivo actual de todas las bobinas de ese asiento, estén o no desactivadas. Si espera que una bobina desactivada siga en ese estado en una instrucción de este tipo, puede provocar efectos inesperados o no deseados en su aplicación. Cuando se haya desactivado una bobina o contacto de relé, podrá cambiar su estado usando el comando Force ON o Force OFF. Las bobinas o relés habilitados no podrán ser forzados.
Si no se respetan estas precauciones pueden producirse graves lesiones, daños materiales o incluso la muerte.
ADVERTENCIA
L
31004676 4/2006 99
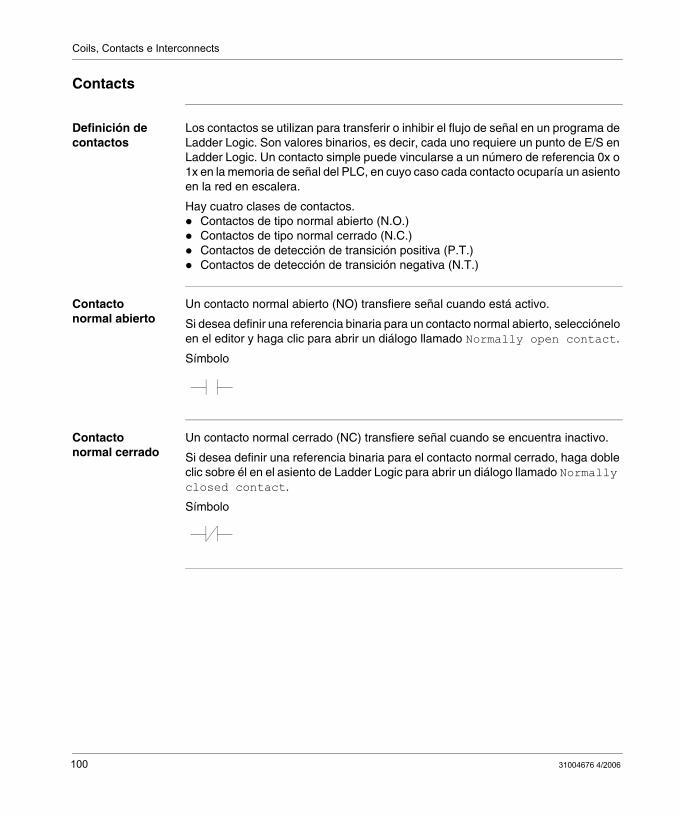
Coils, Contacts e Interconnects
Contacts
Definición de contactos
Los contactos se utilizan para transferir o inhibir el flujo de señal en un programa de Ladder Logic. Son valores binarios, es decir, cada uno requiere un punto de E/S en Ladder Logic. Un contacto simple puede vincularse a un número de referencia 0x o 1x en la memoria de señal del PLC, en cuyo caso cada contacto ocuparía un asiento en la red en escalera.
Hay cuatro clases de contactos.Contactos de tipo normal abierto (N.O.)Contactos de tipo normal cerrado (N.C.)Contactos de detección de transición positiva (P.T.)Contactos de detección de transición negativa (N.T.)
Contacto normal abierto
Un contacto normal abierto (NO) transfiere señal cuando está activo.
Si desea definir una referencia binaria para un contacto normal abierto, selecciónelo en el editor y haga clic para abrir un diálogo llamado Normally open contact.
Símbolo
Contacto normal cerrado
Un contacto normal cerrado (NC) transfiere señal cuando se encuentra inactivo.
Si desea definir una referencia binaria para el contacto normal cerrado, haga doble clic sobre él en el asiento de Ladder Logic para abrir un diálogo llamado Normally closed contact.
Símbolo
100 31004676 4/2006

Coils, Contacts e Interconnects
Contacto de detección de transición positiva
Un contacto de detección transición positiva (PT) sólo transfiere señal durante un ciclo al pasar de activo a inactivo.
Si desea definir una referencia binaria para un contacto de detección de transición positiva, selecciónelo en el editor y haga clic para abrir un diálogo llamado Positive transition contact.
Símbolo
Contacto de detección de transición negativa
Un contacto de detección de transición negativa (NT) sólo transfiere señal durante un ciclo al pasar de activo a inactivo.
Si desea definir una referencia binaria para un contacto de detección de transición negativa, selecciónelo en el editor y haga clic para abrir un diálogo llamado Contact negative transition.
Símbolo
31004676 4/2006 101

Coils, Contacts e Interconnects
Interconnects (Shorts)
Definición de interconexión (conexión)
Las conexiones (shorts) son simples uniones mediante líneas rectas entre contactos e instrucciones en una red de Ladder Logic. Las conexiones pueden insertarse en una red de forma horizontal o vertical.
Hay dos clases de conexiones.Conexión horizontalConexión vertical
Conexión horizontal
Una conexión es una unión en línea recta entre contactos y asientos de una instrucción a través de la cual se puede controlar el flujo de señal.
Una conexión horizontal se utiliza para extender la lógica a una fila de una red sin interrumpir el flujo de señal. Cada conexión horizontal ocupa un asiento en la red y utiliza una palabra de la memoria del PLC.
Símbolo
Conexión vertical
Una conexión vertical conecta asientos o contactos de una instrucción colocados uno por encima del otro en una columna. Las conexiones verticales también pueden conectar entradas o salidas de una instrucción para crear condiciones del tipo "o" (OR). Al unir dos contactos mediante una conexión vertical, se transferirá señal cuando uno o ambos contactos reciban esa señal.
La conexión vertical es única en dos direcciones.Puede coexistir en un asiento de red con otro elemento o valor de asiento.No consume memoria del PLC.
Símbolo
102 31004676 4/2006

31004676 4/2006
10
Utilización de interruptUtilización de interrupt
Prestaciones relacionadas con interrupt
Las instrucciones relacionadas con interrupt funcionan con una administración del sistema mínima. Las prestaciones de las instrucciones relacionadas con interrupt son especialmente importantes. El uso de una instrucción de interrupt de temporizador de intervalo (ITMR) permite añadir alrededor de un 6% al tiempo de ciclo de la Ladder Logic administrada; este aumento no incluye el tiempo necesario para ejecutar la subrutina de procesado de interrupt.
Tiempo de retardo de interrupt
La siguiente tabla muestra los tiempos de retardo máximo y mínimo de interrupt que se pueden esperar.
Para estos tiempos de retardo sólo se asume un interrupt cada vez.
Prioridades de interrupt
El PLC utiliza las siguientes reglas para decidir qué rutina de procesado de interrupt va a ejecutar en caso de que se reciban a la vez varios interrupts.
Un interrupt generado por un módulo de interrupt tiene mayor prioridad que otro generado por un temporizador.Los interrupts procedentes de módulos en los slots más bajos del bastidor local tienen prioridad sobre interrupts desde módulos de los slots más altos.
Si el PLC está ejecutando una subrutina de procesado de interrupt cuando se recibe un interrupt de mayor prioridad, la rutina actual de procesado de interrupt se completará antes de que comience la nueva rutina.
Administración del sistema de ITMR
Sin tarea pendiente 60 ms/ms
Tiempo de respuesta
Mínimo 98 ms
Máximo durante la ejecución lógica y la recepción de comandos Modbus
400 ms
Administración del sistema total (sin contar el tiempo normal de ejecución lógica) 155 ms
103

Utilización de interrupt
Instrucciones que no se pueden utilizar en una rutina de procesado de interrupt
Las siguientes instrucciones (no reentrantes) de Ladder Logic no se pueden utilizar dentro de una subrutina de procesado de interrupt.
MSTRREAD / WRITPCFL / EMTHTemporizadores T1.0, T0.1, T.01 y T1MS (no establecerán el bit de error 2, resultados del temporizador no válidos)Redes de ecuaciónInstrucciones cargables de usuario (no establecerán el bit de error 2)
Si se aplica alguna de estas instrucciones en una rutina de procesado de interrupt, la subrutina se interrumpirá, se activará la salida de error de la instrucción ITMR o IMOD que generó el interrupt y se establecerá el bit 2 en el registro de estado.
Interrupt con BMDI/ID/IE
Existen tres instrucciones de control de interrupt con o sin máscara para proteger datos en Ladder Logic normal (administrada) y en la lógica de subrutina de interrupt (no administrada). Se trata de las instrucciones Bloquear interrupt (ID), Habilitar interrupt (IE) y Mover bloque con interrupts bloqueados (BMDI).
Si se ejecuta un interrupt en el intervalo de tiempo entre la ejecución de la instrucción ID y la siguiente instrucción IE, el interrupt se almacenará en un búfer. La ejecución de un interrupt almacenado en un búfer tiene lugar mientras se ejecuta la instrucción IE. Si se producen dos o más interrupts del mismo tipo entre la ejecución de ID e IE, se establecerá el bit de error de desborde del interrupt con máscara, y la subrutina iniciada por el interrupt sólo se ejecutará una vez.
La instrucción BMDI puede utilizarse para enmascarar un interrupt generado por un temporizador o por E/S locales, realizar un movimiento de datos en bloque y, a continuación, desenmascarar el interrupt. Permite el intercambio de un bloque de datos, ya sea dentro de la subrutina o en una o más ubicaciones del programa lógico administrado.
La instrucción BMDI puede utilizarse para reducir el tiempo entre la activación y el bloqueo de interrupts. Por ejemplo, la instrucción BMDI puede usarse para proteger los datos que utiliza la rutina de procesado de interrupt cuando Modbus, Modbus Plus, Peer Cop o las E/S distribuidas (DIO) actualizan o leen los datos.
104 31004676 4/2006

31004676 4/2006
11
Utilización de subrutinasUtilización de subrutinas
Método JSR/LAB El siguiente ejemplo muestra un conjunto de tres redes de lógica de aplicación, la última de las cuales se utiliza para una subrutina de conteo progresivo. El segmento 32 se ha eliminado de la tabla de secuencia de ciclos del administrador de segmentos.
Scheduled Logic Flow
Segment 001Network 00001
Network 00002
Segment 002Network 00001
00001
00001JSR10001
40256
40256
00001ADD
40256
40256
40256SUB
40256
40999
00010SUB
00001
00001JSR
00001RET
00001LAB
Segment 032Network 00001
Subroutine Segment
105

Utilización de subrutinas
Si la entrada 100001 al bloque JSR de la red 2 del segmento 1 pasa de activo a inactivo, el ciclo lógico saltará a la subrutina nº 1 contenida en la red 1 del segmento 32.
La subrutina se ejecutará a sí misma internamente diez veces, proceso que cuenta el bloque ADD. Los nueve primeros bucles terminarán con el bloque JSR en la subrutina (red 1 del segmento 2), volviendo a enviar el ciclo al bloque LAB. Al completarse el décimo bucle, el bloque RET volverá a enviar el ciclo lógico a la lógica administrada del asiento JSR contenido en la red 2 del segmento 1.
106 31004676 4/2006

31004676 4/2006
12
Instalación de instrucciones cargables DXInstalación de instrucciones cargables DX
Cómo instalar las instrucciones cargables DX
Las instrucciones cargables DX sólo estarán disponibles si han sido instaladas. Con la instalación del software Concept, las instrucciones cargables DX se ubicarán en el disco duro. Después, deberá expandir e instalar del siguiente modo las instrucciones cargables que desee utilizar.
Paso Acción
1 Abrir el configurador con el comando de menú Project → Configurator.
2 Abrir el cuadro de diálogo Loadables mediante Configure → Loadables...
3 Pulsar el botón de comando Unpack... para abrir el cuadro de diálogo estándar de Windows Unpack Loadable File, donde se pueden seleccionar las instrucciones cargables de archivos múltiples (instrucciones cargables DX). Seleccionar el archivo cargable necesario y hacer clic en el botón OK para insertarlo en el cuadro de lista Available:.
4 Pulsar el botón de comando Install=> para instalar la instrucción cargable seleccionada en el cuadro de lista Available:. La instrucción cargable instalada aparecerá en el cuadro de lista Installed:.
5 Pulsar el botón de comando Edit... para abrir el cuadro de diálogo Loadable Instruction Configuration. Cambiar el código operacional en caso necesario o aceptar el predeterminado. Podrá asignar un código operacional a las instrucciones cargables en el cuadro de lista Opcode para habilitar el acceso al programa de aplicación por medio de este código. Los códigos operacionales que ya estén asignados a una instrucción cargable estarán identificados con un *. Hacer clic en el botón OK.
6 Hacer clic en el botón OK del cuadro de diálogo Loadables.El contador de la configuración de instrucciones cargables quedará ajustado. La instrucción cargable instalada estará disponible para la programación en el menú Objects → List Instructions → DX Loadable.
107

Instalación de instrucciones cargables DX
108 31004676 4/2006
31004676 4/2006
II
Descripción de instrucciones (A a D)Presentación
Introducción En esta sección aparecen descripciones de instrucciones ordenadas alfabéti-camente de la A a la D.
Contenido Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
13 1X3X - Simulación de entrada 111
14 AD16: Añadir 16 Bits 115
15 ADD: Adición 119
16 AND: AND lógico 123
17 BCD: Código binario a binario 129
18 BLKM: Mover bloque 133
19 BLKT: Bloque a tabla 137
20 BMDI: Mover bloque con interrupts bloqueados 141
21 BROT: Rotación de bits 145
22 CALL: Activación de función DX inmediata o retardada 151
23 CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB
159
24 CHS: Configuración de Hot standby 167
25 CKSM: Suma de control 175
26 CMPR: Comparar registro 181
27 Coils 187
28 COMM - Función de comunicaciones ASCII 191
29 COMP: Complementar una matriz 195
30 Contacts 201
31 CONV - Convertir datos 205
109

Descripción de instrucciones (A a D)
32 CTIF - Contador, temporizador, función de interrupt 209
33 DCTR: Contador regresivo 217
34 DIOH: Estado funcional de E/S distribuidas 221
35 DISA - Control binario bloqueado 227
36 DIV: División 231
37 DLOG: Captación automática de datos de medidas para el apoyo de lectura/escritura PCMCIA
237
38 DMTH - Matemática de doble precisión 245
39 DRUM: Secuenciador de tambor 255
40 DV16: División de 16 bits 261
Capítulo Nombre del capítulo Página
110 31004676 4/2006

31004676 4/2006
13
1X3X - Simulación de entradaPresentación
Introducción En este capítulo se describe la instrucción 1X3X.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve: 1X3X - Simulación de entrada 112
Representación: 1X3X - Simulación de entrada 113
111

1X3X - Simulación de entrada
Descripción breve: 1X3X - Simulación de entrada
Descripción de la función
La instrucción de simulación de entrada proporciona un método sencillo para simular los valores de datos de entrada 1xxxx y 3xxx. Este bloque es similar a Mover bloque, la instrucción BLKM. Cuando la entrada de control recibe alimentación, la tabla de fuente se copia en la de destino (entrada).
112 31004676 4/2006

1X3X - Simulación de entrada
Representación: 1X3X - Simulación de entrada
Símbolo Representación de la instrucción.
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
ENTRADA DE CONTROL ACTIVOtabla dedestino
tabla de fuente
1X3X
longitudLongitud de tabla: 1 - 100
Parámetros Referencia de memoria de señal
Tipo de datos Significado
Entrada superior 0x, 1x Ninguno
Tabla de destino(asiento superior)
1x, 3x INT
Tabla de fuente(asiento intermedio)
4x INT Contiene la fuente que se va a mover al destino.
Longitud(asiento inferior)
INT (Longitud: NNN si 3X).Longitud: 16* si 4x.
Salida superior 0x Ninguno Transfiere señales cuando la entrada superior las recibe.
31004676 4/2006 113

1X3X - Simulación de entrada
114 31004676 4/2006

31004676 4/2006
14
AD16: Añadir 16 BitsPresentación
Introducción En este capítulo se describe la instrucción AD16.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 116
Representación: AD16 - adición de 16 bits 117
115

AD16: Añadir 16 Bits
Descripción breve
Descripción de la función
La instrucción AD16 suma 16 bits con o sin signo al valor 1 (su asiento superior) y al valor 2 (su asiento intermedio), y luego coloca la suma en un registro de salida 4x del asiento inferior.
116 31004676 4/2006
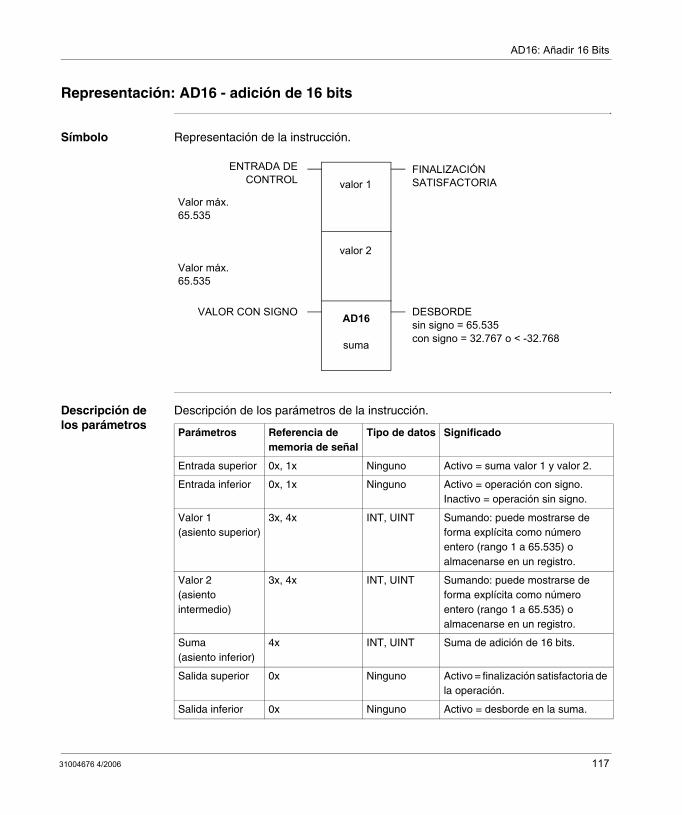
AD16: Añadir 16 Bits
Representación: AD16 - adición de 16 bits
Símbolo Representación de la instrucción.
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
AD16
suma
valor 2
valor 1
ENTRADA DECONTROL
FINALIZACIÓN SATISFACTORIA
DESBORDEsin signo = 65.535con signo = 32.767 o < -32.768
VALOR CON SIGNO
Valor máx.65.535
Valor máx.65.535
Parámetros Referencia de memoria de señal
Tipo de datos Significado
Entrada superior 0x, 1x Ninguno Activo = suma valor 1 y valor 2.
Entrada inferior 0x, 1x Ninguno Activo = operación con signo.Inactivo = operación sin signo.
Valor 1(asiento superior)
3x, 4x INT, UINT Sumando: puede mostrarse de forma explícita como número entero (rango 1 a 65.535) o almacenarse en un registro.
Valor 2(asiento intermedio)
3x, 4x INT, UINT Sumando: puede mostrarse de forma explícita como número entero (rango 1 a 65.535) o almacenarse en un registro.
Suma(asiento inferior)
4x INT, UINT Suma de adición de 16 bits.
Salida superior 0x Ninguno Activo = finalización satisfactoria de la operación.
Salida inferior 0x Ninguno Activo = desborde en la suma.
31004676 4/2006 117

AD16: Añadir 16 Bits
118 31004676 4/2006

31004676 4/2006
15
ADD: AdiciónPresentación
Introducción En este capítulo se describe la instrucción ADD.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 120
Representación: ADD - Adición de precisión simple 121
119

ADD: Adición
Descripción breve
Descripción de la función
La instrucción ADD suma el valor 1 sin signo (su asiento superior) al valor 2 sin signo (su asiento intermedio), y luego guarda la suma en un registro de salida del asiento inferior.
120 31004676 4/2006

ADD: Adición
Representación: ADD - Adición de precisión simple
Símbolo Representación de la instrucción.
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
ADD
suma
valor 2
valor 1
ENTRADA DECONTROL DESBORDE
Suma > 999 - PLC de 16 bitsSuma > 9.999 - PLC de 24 bits 65.535 - PLC 785L
Valores máx.: 999 - PLC de 16 bits 9.999 - PLC de 24 bits 65.535 – PLC 785L
Parámetros Referencia de memoria de señal
Tipo de datos Significado
Entrada superior 0x, 1x Ninguno Activo = suma valor 1 y valor 2.
Valor 1(asiento superior)
3x, 4x INT, UINT Suma > 999 - PLC de 16 bits.Suma > 9.999 - PLC de 24 bits. 65.535 - PLC 785L
Valor 2(asiento intermedio)
3x, 4x INT, UINT Suma > 999 - PLC de 16 bits.Suma > 9.999 - PLC de 24 bits. 65.535 - PLC 785L
Suma(asiento inferior)
4x INT, UINT Suma
Salida superior 0x Ninguno Activo = desborde en la suma.Suma > 999 en PLC de 16 bits.Suma > 9.999 en PLC de 24 bits. 65.535 en PLC 785L.
31004676 4/2006 121

ADD: Adición
122 31004676 4/2006

31004676 4/2006
16
AND: AND lógicoPresentación
Introducción En este capítulo se describe la instrucción AND.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 124
Representación: AND - And lógico 125
Descripción de los parámetros 127
123

AND: And lógico
Descripción breve
Descripción de la función
La instrucción AND realiza una operación booleana AND en los modelos de bits de las matrices de fuente y de destino.
El modelo de bits en el que se ha ejecutado la instrucción AND se envía a continuación a la matriz de destino, sobrescribiendo los contenidos anteriores.
Sobrescritura de las bobinas bloqueadas dentro de la matriz de destino sin habilitarlas.AND sobrescribirá las bobinas bloqueadas dentro de la matriz de destino sin habilitarlas. Esto puede provocar daños personales si una bobina ha desactivado una operación debido a causas de mantenimiento o reparación, puesto que el estado de la bobina puede cambiar mediante la operación AND.
Si no se respetan estas precauciones pueden producirse graves lesiones, daños materiales o incluso la muerte.
0 1 1 0
0 0
AND
0 0
AND
1 1
AND
1 0
ANDdestination
bits
sourcebits
ADVERTENCIA
124 31004676 4/2006

AND: And lógico
Representación: AND - And lógico
Símbolo Representación de la instrucción.
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
ENTRADA DE CONTROL ACTIVO
Longitud: 1 - 100 registros(16 a 1.600 bits)
matriz defuente
matriz dedestino
AND
longitud
Parámetros Referencia de memoria de señal
Tipo de datos Significado
Entrada superior 0x, 1x Ninguno Inicia la instrucción AND.
Matriz de fuente(asiento superior)
0x, 1x, 3x, 4x BOOL, WORD Primera referencia en la matriz de fuente.
Matriz de destino(asiento intermedio)
0x, 4x BOOL, WORD Primera referencia en la matriz de destino.
Longitud(asiento inferior)
INT, UINT Longitud de la matriz; rango de 1 a 100.
Salida superior 0x Ninguno Refleja el estado de la entrada superior.
31004676 4/2006 125

AND: And lógico
Ejemplo de AND Cuando el contacto 10001 transfiere señal, la matriz de fuente formada por el modelo de bits en los registros 40600 y 40601 recibe la instrución AND con la matriz de destino formada por el modelo de bits en los registros 40604 y 40605, sobrescri-biendo el modelo de bits anterior en la matriz de destino.
Nota: Si desea guardar el modelo de bits de destino original de los registros 40604 y 40605, copie la información en otra tabla con la instrucción BLKM antes de llevar a cabo la operación AND.
Matriz de fuente40600 = 1111111100000000 40601 = 1111111100000000
Matriz de destino original40604 = 1111111111111111 40605 = 0000000000000000
Matriz de destino con la instrucción AND40604 = 1111111100000000 40605 = 0000000000000000
40600
40604
00002
10001
AND
126 31004676 4/2006

AND: And lógico
Descripción de los parámetros
Longitud de la matriz (asiento inferior)
El número entero introducido en el asiento inferior especifica la longitud de la matriz, es decir, el número de registros o palabras de 16 bits que hay en las dos matrices. La longitud máxima debe estar comprendida entre 1 y 100. Una longitud de 2 indica que se aplicará la instrucción AND a 32 bits en cada matriz.
31004676 4/2006 127

AND: And lógico
128 31004676 4/2006

31004676 4/2006
17
BCD: Código binario a binarioPresentación
Introducción En este capítulo se describe la instrucción BCD.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 130
Representación: BCD - Conversión de valor decimal codificado en binario 131
129

BCD: Código binario a binario
Descripción breve
Descripción de la función
La instrucción BCD se puede utilizar para convertir un valor binario en un valor decimal codificado en binario (BCD) o un valor BCD en uno binario. El tipo de conversión que se va a realizar está controlado por el estado del asiento inferior.
130 31004676 4/2006

BCD: Código binario a binario
Representación: BCD - Conversión de valor decimal codificado en binario
Símbolo Representación de la instrucción.
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
ENTRADA DECONTROL
BINARIO/BCD
ACTIVO
Activo = BCD a binarioInactivo = binario a BCD
ERROR
registro defuente
registro dedestino
BCD
nº 1
Parámetros Referencia de memoria de señal
Tipo de datos Significado
Entrada superior 0x, 1x Ninguno Activo = habilita la conversión.
Entrada inferior 0x, 1x Ninguno Activo = BCD → conversión binaria. Inactivo = binario → conversión BCD.
Registro de fuente(asiento superior)
3x, 4x INT, UINT Registro de fuente donde se guarda el valor numérico que se va a convertir.
Registro de destino(asiento intermedio)
4x INT, UINT Registro de destino al que se va a enviar el valor numérico una vez convertido.
Nº 1(asiento inferior)
INT, UINT Valor constante, no se puede modificar.
Salida superior 0x Ninguno Refleja el estado de la entrada superior.
Salida inferior 0x Ninguno Activo = error en la operación de conversión.
31004676 4/2006 131

BCD: Código binario a binario
132 31004676 4/2006
31004676 4/2006
18
BLKM: Mover bloquePresentación
Introducción En este capítulo se describe la instrucción BLKM.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 134
Representación: BLKM - Mover bloque 135
133

BLKM: Mover bloque
Descripción breve
Descripción de la función
La instrucción BLKM (mover bloque) copia el contenido completo de la tabla de fuente en una tabla de destino en un ciclo de programa.
Sobrescritura de las bobinas bloqueadas dentro de una tabla de destino sin habilitarlas.BLKM sobrescribirá las bobinas bloqueadas dentro de una tabla de destino sin habilitarlas. Esto puede provocar daños si se ha bloqueado una bobina para su reparación o mantenimiento ya que el estado de la bobina puede cambiar como resultado de una instrucción BLKM.
Si no se respetan estas precauciones pueden producirse graves lesiones, daños materiales o incluso la muerte.
ADVERTENCIA
134 31004676 4/2006
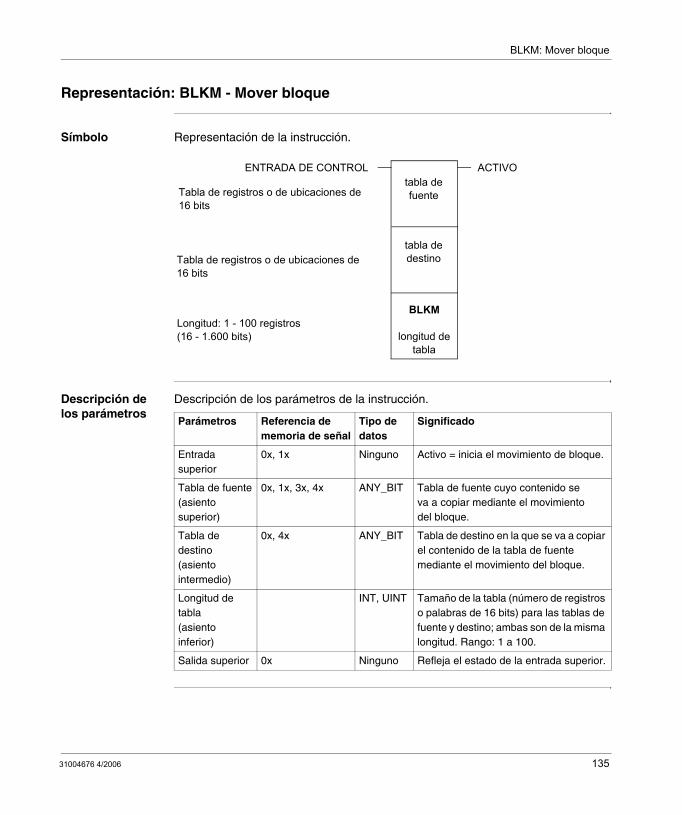
BLKM: Mover bloque
Representación: BLKM - Mover bloque
Símbolo Representación de la instrucción.
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
BLKM
longitud de tabla
tabla dedestino
tabla defuente
ENTRADA DE CONTROL ACTIVO
Longitud: 1 - 100 registros(16 - 1.600 bits)
Tabla de registros o de ubicaciones de 16 bits
Tabla de registros o de ubicaciones de 16 bits
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno Activo = inicia el movimiento de bloque.
Tabla de fuente(asiento superior)
0x, 1x, 3x, 4x ANY_BIT Tabla de fuente cuyo contenido se va a copiar mediante el movimiento del bloque.
Tabla de destino(asiento intermedio)
0x, 4x ANY_BIT Tabla de destino en la que se va a copiar el contenido de la tabla de fuente mediante el movimiento del bloque.
Longitud de tabla(asiento inferior)
INT, UINT Tamaño de la tabla (número de registros o palabras de 16 bits) para las tablas de fuente y destino; ambas son de la misma longitud. Rango: 1 a 100.
Salida superior 0x Ninguno Refleja el estado de la entrada superior.
31004676 4/2006 135

BLKM: Mover bloque
136 31004676 4/2006

31004676 4/2006
19
BLKT: Bloque a tablaPresentación
Introducción En este capítulo se describe la instrucción BLKT.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 138
Representación: BLKT - Mover bloque a tabla 139
Descripción de los parámetros 140
137
BLKT: Bloque a tabla
Descripción breve
Descripción de la función
La instrucción BLKT (bloque a tabla) combina las funciones de R→T y BLKM en una sola instrucción. En un ciclo de programa, puede copiar datos de un bloque de fuente en un bloque de destino de una tabla. El bloque de fuente será de longitud fija. El bloque dentro de la tabla será de la misma longitud, pero la longitud total de la tabla sólo estará limitada por el número de registros de la configuración del sistema.
Todos los registros 4x del PLC pueden verse dañados por datos copiados desde el bloque de fuente.BLKT es una poderosa instrucción que puede dañar todos los registros 4x del PLC con datos copiados del bloque de fuente. Deberá utilizar lógica externa junto con la entrada intermedia o inferior para llevar el valor situado en el pointer a un rango seguro.
Si no se respetan estas precauciones pueden producirse graves lesiones, daños materiales o incluso la muerte.
ADVERTENCIA
138 31004676 4/2006

BLKT: Bloque a tabla
Representación: BLKT - Mover bloque a tabla
Símbolo Representación de la instrucción.
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
BLKT
longitud de bloque
pointer
bloquede fuente
ENTRADA DECONTROL
MOVIMIENTO FINALIZADO
RESTABLECERPOINTER
ERRORDETENER POINTER
Longitud: 1 - 100 registros(16 - 1.600 bits)
Parámetros Referencia de memoria de señal
Tipo de datos Significado
Entrada superior 0x, 1x Ninguno Activo = inicia el movimiento de DX.
Entrada intermedia 0x, 1x Ninguno Activo = detiene el pointer.
Entrada inferior 0x, 1x Ninguno Activo = pone el pointer a cero.
Bloque de fuente(asiento superior)
4x BYTE, WORD Primer registro de salida del bloque de registros contiguos cuyo contenido se va a copiar en un bloque de registros de la tabla de destino.
Pointer(asiento intermedio)
4x BYTE, WORD Pointer para la tabla de destino.
Longitud de bloque(asiento inferior)
INT, UINT Longitud de bloque (número de registros 4x) de los bloques de fuente y de destino. Rango: 1 a 100.
Salida superior 0x Ninguno Activo = operación correcta.
Salida intermedia 0x Ninguno Activo = error/el movimiento no es posible.
31004676 4/2006 139

BLKT: Bloque a tabla
Descripción de los parámetros
Entradas intermedia e inferior
Las entradas intermedia e inferior se pueden utilizar para controlar el pointer de modo que los datos de origen no se copien en registros necesarios para otros propósitos en el programa lógico.
Cuando la entrada intermedia esté activa, el valor en el registro del pointer se congelará mientras continúe la operación BLKT. Esto hará que los nuevos datos que se están copiando en el destino sobrescriban los datos del bloque copiados en el ciclo de programa anterior.
Si la entrada inferior está activa, el valor del registro del pointer se pondrá a cero. Esto hará que la operación BLKT copie los datos de origen en el primer bloque de registros de la tabla de destino.
Pointer (asiento intermedio)
El registro 4x introducido en el asiento intermedio será el pointer a la tabla de destino. El primer registro de la tabla de destino es el registro que va inmediatamente después del pointer, es decir, si el registro del pointer es 400107, el primer registro de la tabla de destino será 400108.
El valor guardado en el registro del pointer indica dónde se comenzarán a copiar los datos de origen en la tabla de destino. Este valor especifica el número de bloque dentro de la tabla de destino.
Nota: La tabla de destino se ha dividido en una serie de bloques de registros, cada uno de los cuales tiene la misma longitud que el bloque de fuente. Por ello, el tamaño de la tabla de destino será un múltiplo de la longitud del bloque de fuente, pero su tamaño total no estará definido específicamente en la instrucción. Si no se controla, la tabla de destino podría consumir todos los registros 4x disponibles en la configuración del PLC.
140 31004676 4/2006

31004676 4/2006
20
BMDI: Mover bloque con interrupts bloqueadosPresentación
Introducción En este capítulo se describe la instrucción BMDI.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve: BMDI - Mover bloque con interrupts bloqueados 142
Representación: BMDI - Mover bloque con interrupts bloqueados 143
141

BMDI: Mover bloque con interrupts bloqueados
Descripción breve: BMDI - Mover bloque con interrupts bloqueados
Descripción de la función
La instrucción BMDI enmascara el interrupt, inicia una operación de movimiento de bloque (BLKM) y, a continuación, desenmascara los interrupts.
142 31004676 4/2006
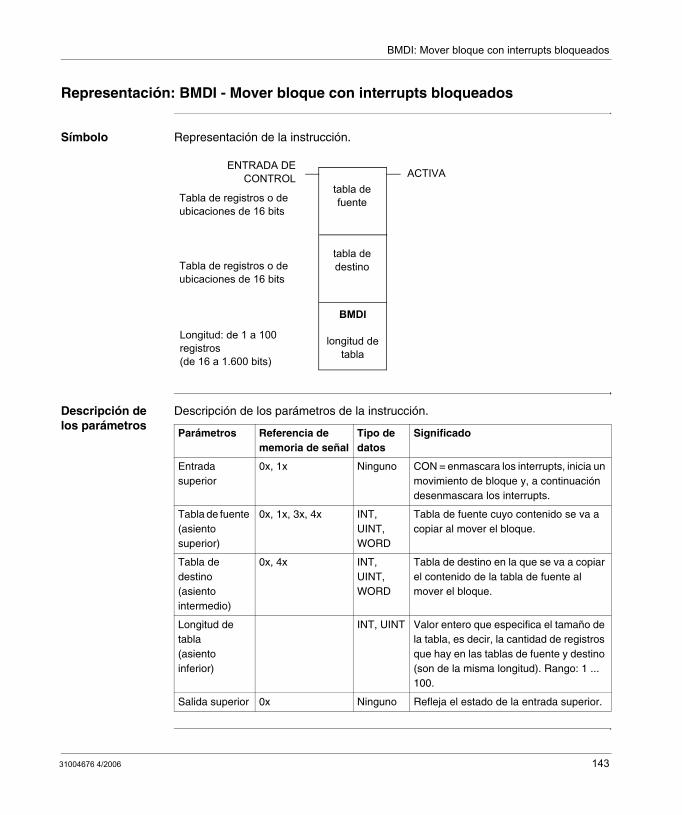
BMDI: Mover bloque con interrupts bloqueados
Representación: BMDI - Mover bloque con interrupts bloqueados
Símbolo Representación de la instrucción.
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
BMDI
longitud de tabla
tabla dedestino
tabla defuente
ENTRADA DECONTROL ACTIVA
Longitud: de 1 a 100 registros(de 16 a 1.600 bits)
Tabla de registros o de ubicaciones de 16 bits
Tabla de registros o de ubicaciones de 16 bits
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno CON = enmascara los interrupts, inicia un movimiento de bloque y, a continuación desenmascara los interrupts.
Tabla de fuente (asiento superior)
0x, 1x, 3x, 4x INT, UINT, WORD
Tabla de fuente cuyo contenido se va a copiar al mover el bloque.
Tabla de destino(asiento intermedio)
0x, 4x INT, UINT, WORD
Tabla de destino en la que se va a copiar el contenido de la tabla de fuente al mover el bloque.
Longitud de tabla(asiento inferior)
INT, UINT Valor entero que especifica el tamaño de la tabla, es decir, la cantidad de registros que hay en las tablas de fuente y destino (son de la misma longitud). Rango: 1 ... 100.
Salida superior 0x Ninguno Refleja el estado de la entrada superior.
31004676 4/2006 143

BMDI: Mover bloque con interrupts bloqueados
144 31004676 4/2006

31004676 4/2006
21
BROT: Rotación de bitsPresentación
Introducción En este capítulo se describe la instrucción BROT.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 146
Representación: BROT - Rotación de bits 147
Descripción de los parámetros 149
145

BROT: Rotación de bits
Descripción breve
Descripción de la función
La instrucción BROT (rotación de bits) desplaza el modelo de bits de una matriz de fuente y, a continuación, lleva el modelo de bits desplazado a una matriz de destino. El modelo de bits se desplaza una posición a derecha o izquierda por cada ciclo de programa.
Sobrescritura de cualquier bobina bloqueada dentro de una matriz de destino sin habilitarla.BROT sobrescribirá cualquier bobina bloqueada dentro de una matriz de destino sin haberla habilitado. Esto puede causar daños si se ha desactivado una bobina para su reparación o mantenimiento y BROT cambia inesperadamente el estado de la bobina.
Si no se respetan estas precauciones pueden producirse graves lesiones, daños materiales o incluso la muerte.
ADVERTENCIA
146 31004676 4/2006

BROT: Rotación de bits
Representación: BROT - Rotación de bits
Símbolo Representación de la instrucción.
BROT
longitud
matrizde destino
matrizde fuente
ENTRADA DE CONTROL ACTIVO
DESPLAZAR/ROTAR
SENSAR BIT (ACTIVO/INACTIVO)DIRECCIÓN(IZQUIERDA/DERECHA)
Longitud: 1 -100 registros(16 - 1.600 bits)
31004676 4/2006 147

BROT: Rotación de bits
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior 0x, 1x Ninguno Activo = desplaza una posición el modelo de bits de la matriz de fuente.
Entrada intermedia
0x, 1x Ninguno Activo = desplazamiento a la izquierda. Inactivo = desplazamiento a la derecha.
Entrada inferior 0x, 1x Ninguno Inactivo = el bit de salida se cae de la matriz de destino.Activo = el bit de salida vuelve al principio de la matriz de destino.
Matriz de fuente(asiento superior)
0x, 1x, 3x, 4x ANY_BIT Primera referencia en la matriz de fuente, es decir, en la matriz cuyo modelo de bits será desplazado.
Matriz de destino(asiento intermedio)
0x, 4x ANY_BIT Primera referencia en la matriz de destino, es decir, en la matriz que muestra el modelo de bits desplazado.
Longitud(asiento inferior)
0x INT, UINT
Longitud de la matriz; rango 1 a 100
Salida superior 0x Ninguno Refleja el estado de la entrada superior.
Salida intermedia
0x Ninguno Inactivo = el bit de salida es 0.Activo = el bit de salida es 1.
148 31004676 4/2006

BROT: Rotación de bits
Descripción de los parámetros
Longitud de la matriz (asiento inferior)
El valor entero que se ha introducido en el asiento inferior especifica la longitud de la matriz, es decir, el número de registros o palabras de 16 bits de cada una de las dos matrices. Las matrices de fuente y de destino tienen la misma longitud. La longitud de la matriz puede ir de 1 a 100. Por ejemplo, una longitud de matriz de 100 indica 1.600 ubicaciones de bits.
Resultado del desplazamiento (salida intermedia)
La salida intermedia indica el sentido del bit que sale de la matriz de fuente (el bit más a la izquierda o más a la derecha) como resultado del desplazamiento.
31004676 4/2006 149

BROT: Rotación de bits
150 31004676 4/2006

31004676 4/2006
22
CALL: Activación de función DX inmediata o retardadaPresentación
Introducción En este capítulo se describe la instrucción CALL.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve: CALL - Activación de función DX inmediata o retardada 152
Representación: CALL - Activar función DX inmediata 153
Representación: CALL - Activar función DX retardada 156
151

CALL: Activación de función DX
Descripción breve: CALL - Activación de función DX inmediata o retardada
Descripción de la función
La instrucción CALL activa una función DX inmediata o retardada desde una librería de funciones definidas por códigos de función. El coprocesador copia los datos y el código de función en su memoria local, procesa los datos y devuelve los resultados a la memoria del controlador.
Códigos de función:0-499: DX inmediatas/retardadas del usuario.500-9999: DX inmediatas/retardadas del sistema.
Los dos MSB del registro superior son los números de coprocesador en un sistema de coprocesadores múltiples.
152 31004676 4/2006

CALL: Activación de función DX
Representación: CALL - Activar función DX inmediata
Vista general El contenido de esta sección se aplica específicamente a la función DX inmediata de la instrucción CALL.
Símbolo Representación de la instrucción para una función DX CALL inmediata.
ENTRADA DE CONTROL COMPLETO
ERROR
códigode función
códigofuente
CALL
longitudLongitud: 1 - 255
EXPLORAR CALL
31004676 4/2006 153

CALL: Activación de función DX
Descripción de los parámetros
Descripción de los parámetros de la instrucción para una función DX CALL inmediata.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno En estado activo inicia la instrucción CALL.
Entrada inferior 0x, 1x Ninguno La entrada del asiento inferior se utiliza con una función DX inmediata para seguir explorando la instrucción, independientemente del estado que tenga la entrada superior. La siguiente tabla, denominada Funciones DX inmediatas, muestra una lista de los códigos, sus nombres y sus funciones.
Valor(asiento superior)
0x, 3x INT, UINT
El asiento superior se utiliza para especificar el código de función que se va a ejecutar. Puede introducirse de forma explícita como una constante o como un valor en un registro de salida 4xxxx. Los códigos pueden estar incluidos en dos rangos:
Los códigos de 0 a 499 se utilizan para funciones DX definibles por el usuario.Los códigos de 500 a 9.999 se utilizan para funciones DX de sistema.
Ambos tipos de códigos, definibles por el usuario y por el sistema, se aplican tanto a las funciones inmediatas como a las retardadas. Schneider Electric se encarga de suministrar todos estos códigos.
Registro(asiento intermedio)
4x INT, UINT
El registro 4xxxx del asiento intermedio es el primero de un bloque de registros que se va a pasar al coprocesador para ser procesado.
Longitud(asiento inferior)
INT, UINT
El número de registros del bloque se define en el asiento inferior.
Salida superior 0x Ninguno Se encuentra en estado activo cuando la función se completa correctamente.
Salida inferior 0x Ninguno La salida del asiento inferior se activará si se detecta un error en la función.
154 31004676 4/2006

CALL: Activación de función DX
Funciones DX inmediatas
En esta tabla se recogen las funciones DX inmediatas.
Nombre Código Función
f_config 500 Obtener datos de configuración del coprocesador
f_2md_fl 501 Convertir un entero con dos registros en una coma flotante de 64 bits
f_fl_2md 502 Convertir una coma flotante en un entero con dos registros
f_4md_fl 503 Convertir un entero con cuatro registros en una coma flotante
f_fl_4md 504 Convertir una coma flotante en un entero con cuatro registros
f_1md_fl 505 Convertir un entero con un registro en una coma flotante
f_fl_1m 506 Convertir una coma flotante en un entero con un registro
f_exp 507 Función exponencial
f_log 508 Logaritmo natural
f_log10 509 Logaritmo en base 10
f_pow 510 Elevar a una potencia
f_sqrt 511 Raíz cuadrada
f_cos 512 Coseno
f_sin 513 Seno
f_tan 514 Tangente
f_atan 515 Arcotangente x
f_atan2 516 Arcotangente y/x
f_asin 517 Arcoseno
f_acos 518 Arcocoseno
f_add 519 Añadir
f_sub 520 Substraer
f_mult 521 Multiplicar
f_div 522 Dividir
f_deg_rad 523 Convertir grados en radianes
f_rad_deg 524 Convertir radianes en grados
f_swap 525 Permutar posiciones de bytes en un registro
f_comp 526 Comparación de coma flotante
f_dbwrite 527 Escribir base de datos de registros del coprocesador desde el PLC
f_dbread 528 Leer base de datos de registros del coprocesador desde el PLC
31004676 4/2006 155

CALL: Activación de función DX
Representación: CALL - Activar función DX retardada
Vista general El contenido de esta sección se aplica específicamente a la función DX retardada de la instrucción CALL.
Símbolo Representación de la instrucción para una función DX CALL retardada.
ENTRADA DECONTROL
COMPLETO
ACTIVO
ERROR
código defunción
tabla defuente
CALL
longitudLongitud: 1 - 255
MODO DXRETARDADA
SELECCIONADO
156 31004676 4/2006

CALL: Activación de función DX
Descripción de los parámetros
Descripción de los parámetros de la instrucción para una función DX CALL retardada.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno En estado activo inicia la instrucción CALL.
Entrada intermedia
0x, 1x Ninguno La instrucción llama a una función DX retardada cuando se habilita la entrada al asiento intermedio. La siguiente tabla, denominada Funciones DX retardadas, muestra una lista de los códigos, sus nombres y sus funciones.
Valor(asiento superior)
0x, 3x INT, UINT
El asiento superior se utiliza para especificar el código de función que se va a ejecutar. Puede introducirse de forma explícita como una constante o como un valor en un registro de salida 4xxxx. Los códigos pueden estar incluidos en dos rangos:
Los códigos de 0 a 499 se utilizan para funciones DX definibles por el usuario.Los códigos de 500 a 9.999 se utilizan para funciones DX de sistema.
Ambos tipos de códigos, definibles por el usuario y por el sistema, se aplican tanto a las funciones inmediatas como a las retardadas. Schneider Electric se encarga de suministrar todos estos códigos.
Registro(asiento intermedio)
4x INT, UINT
El registro 4xxxx del asiento intermedio es el primero de un bloque de registros que se va a pasar al coprocesador para ser procesado.
Longitud(asiento inferior)
INT, UINT
El número de registros del bloque se define en el asiento inferior.
Salida superior
0x Ninguno Se encuentra en estado activo cuando la función se completa correctamente.
Salida intermedia
0x Ninguno La salida del asiento intermedio, que se utiliza sólo con las funciones DX retardadas, se activa para indicar que la función está en proceso.
Salida inferior
0x Ninguno La salida del asiento inferior se activará si se detecta un error en la función.
31004676 4/2006 157

CALL: Activación de función DX
Funciones DX retardadas
En esta tabla se recogen las funciones DX retardadas.
Nombre Código Función
f_config 500 Obtener datos de configuración del coprocesador
f_d_dbwr 501 Escribir base de datos de registros del coprocesador desde el PLC
f_d_dbrd 502 Leer base de datos de registros del coprocesador desde el PLC
f_dgets 515 Ejecutar dgets() en línea de comandos
f_dputs 516 Ejecutar dputs() en línea de comandos
f_sprintf 518 Generar una cadena de caracteres
f_sscanf 519 Interpretar una cadena de caracteres
f_egets 520 Función gets() IEEE-488
f_eputs 521 Función puts() IEEE-488
f_ectl 522 Función de control de errores IEEE-488
158 31004676 4/2006

31004676 4/2006
23
CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUBPresentación
Introducción En este capítulo se describe la instrucción CANT.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve: CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB
160
Representación: CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB
161
Descripción de parámetros: CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB
163
159

CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB
Descripción breve: CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB
Descripción dela función
Este bloque de función cargable DX, durante la inicialización de un contacto de disparo, analiza Ladder Logic para extraer la columna específica y los id de contacto correspondientes donde se ha detenido el flujo de señal. El bloque CANT contiene 20 registros. Se utiliza un bloque MSTR para exportar datos de los 20 registros CANT a un PC que esté ejecutando el programa "Action Monitor".
El bloque CANT se utiliza concretamente para interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB. No puede utilizar ningún otro tipo de instrucciones de Ladder Logic en una red. En caso contrario, recibirá resultados incorrectos. Sin embargo, en caso de que deba utilizar una de las instrucciones de Ladder Logic, puede situarlas en una red independiente vinculada a una bobina referenciada a la red que contenga el bloque CANT.
Nota: Sólo los PLC 984 y de lógica Quantum de 24 bits son compatibles con el bloque de función cargable DX. Los controladores de 16 bits no funcionarán con este bloque concreto.
160 31004676 4/2006

CANT - Interpretar bobinas, contactos, temporizadores, contadores
Representación: CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB
Símbolo Representación de la instrucción.
CONTACTO DEACCIÓN 3
CONTACTO DEACCIÓN 2
CONTACTO DEACCIÓN 1
n° de registro
registrode datos
CANT
retardo
31004676 4/2006 161

CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior 0x, 1x Ninguno Contacto de acción 3. Consulte la nota que se encuentra más abajo.
Entrada intermedia
0x, 1x Ninguno Contacto de acción 2. Consulte la nota que se encuentra más abajo.
Entrada inferior 0x, 1x Ninguno Contacto de acción 1. Consulte la nota que se encuentra más abajo.
N° de registroasiento superior
4x INT, UINT Cada bloque CANT contiene a su vez un bloque de diez registros de configuración, que rellenará automáticamente con datos internos.
Registro de datosasiento intermedio
4x INT, UINT Este asiento es el inicio de los registros de datos de salida 4x. Para obtener información más detallada, consulte la sección p. 163".
Retardoasiento inferior
INT, UINT Valor del temporizador de retardo con incrementos de 10 ms. El valor 1 se establece como inactivo.
Nota: Cuando se activa alguna de las entradas anteriores, el bloque de función CANT comienza a ejecutar la rutina. El asiento inferior especifica un tiempo de retardo en incrementos de 10ms, que el bloque utiliza para retrasar el inicio de ejecución de la rutina.
162 31004676 4/2006

CANT - Interpretar bobinas, contactos, temporizadores, contadores
Descripción de parámetros: CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB
Tabla de registros de datos de salida (asiento intermedio)
Tabla de registros de datos de salida
Registro de salida Descripción (Propósito)
4x Contiene la dirección del número de bobina "CANT in use flag" (instrucción CANT en uso). La bobina puede programarse con NO POWER CONNECTED FROM THE LEFT en la última red de Ladder Logic.
4x + 01 Número de versión CANT en formato hexadecimal (por ejemplo, 0105 para v1.05).
4x + 02 Byte de mayor valor = Flags operacionales internos.Byte de menor valor = dirección de un PLC MB+.
4x + 03 Número de bobina de salida (variable dependiente del estado del bloque).
4x + 04 Id de la bobina o el contacto disparador.Bit 15 → 0 - si es una bobina; 1 - si es un contacto.Bit 14-00 → número de contacto o bobina (basado en 1).
4x + 05 12 bits de mayor valor = número de red donde falla la lógica (basado en 1). 4 bits de menor valor = número de columna donde falla la lógica (basado en 1).
4x + 06 Escalón nº 1: Byte de mayor valor = estado de asiento.Byte de menor valor = tipo de asiento (código operacional de la base de datos de asiento).
4x + 07 Escalón nº 1: Número de contacto (basado en 1).
4x + 08 Escalón nº 2: Consulte 4x + 06.
4x + 09 Escalón nº 2: Consulte 4x + 07.
4x + 10 Escalón nº 3: Consulte 4x + 06.
4x + 11 Escalón nº 3: Consulte 4x + 07.
4x + 12 Escalón nº 4: Consulte 4x + 06.
4x + 13 Escalón nº 4: Consulte 4x + 07.
4x + 14 Escalón nº 5: Consulte 4x + 06.
4x + 15 Escalón nº 5. Consulte 4x + 07.
4x + 16 Escalón nº 6: Consulte 4x + 06.
4x + 17 Escalón nº 6: Consulte 4x + 07.
4x + 18 Escalón nº 7: Consulte 4x + 06.
4x + 19 Escalón nº 7: Consulte 4x + 07.
31004676 4/2006 163

CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB
Programación Cada red puede contener sólo un bloque COIL y CANT, que puede situarse en la columna 10 y en la fila 5. La columna 9 situada en el escalón BOTTOM contiene la potencia de entrada para los disparadores (contactos de acción) al bloque CANT que proporcionará más espacio para la programación de Ladder Logic.
En cualquiera de las posiciones de fila disponibles 5, 6 ó 7, puede tener hasta 3 disparadores que deben pertenecer al tipo tradicional de cada [P] o [N]. El número de asiento de bloque CANT será 22 de forma predeterminada (hexadecimal) y no se cambiará.
Configuración de asiento de Ladder Logic
Configuración de asiento de Ladder Logic
Nota: Esto no se encuentra en la parte superior del bloque como sucede habitualmente con los bloques DX.
CANT1
4xxxx
4xxxx]P[
Inicio de diez registros de configuración exclusivos
Valor del temporizadorde retardo en incrementos de 1 Φms(el valor de 1 es inactivo)
]P[
Inicio de bloque de registro de salida común]P[
] [ ] [ ( )
Col nº 10
Fila nº 6
Fila nº 7
164 31004676 4/2006

CANT - Interpretar bobinas, contactos, temporizadores, contadores
Configuración de datos de escritura MSTR
El propósito del bloque MSTR es enviar los 20 registros 4x CANT a un PC basado en el programa "Action Monitor". Esta transmisión de registros se realiza utilizando MB+ o un Modbus Ethernet TCP/IP.
A continuación se indica un ejemplo:
Registros de control de estadísticas MSTR.
Registro Valor Descripción
400121 1 Función para escribir datos.
400122 ? Registro de errores MSTR.
400123 20 Nº de registros de datos para enviar.
400124 40001 Inicio de registros de datos.
400125 22 Dirección de MB+ de destino.
400126 1 Acceso MB+.
400127 0 Acceso MB+.
400128 0 Acceso MB+.
400129 0 Acceso MB+.
Nota: Es necesario programar un bloque MSTR para cada dirección de recepción (PC) en caso de que desee transmitir datos a más de un PC que ejecute "Action Monitor".
31004676 4/2006 165

CANT - Interpretar bobinas, contactos, temporizadores, contadores y el bloque SUB
Configuración de MSTR.
Configuración de MSTR.
MSTR20
40001
40121]P[
Registros de control MSTR (p. ej., 40121)
Base de registro de salida CANT (p. ej., 40001)
1530
- ( ) -1530
<-- Consulte el registro 4xxx1 en la configuración del bloque DX CANT que aparece más arriba
20 registros que se van a escribir
166 31004676 4/2006

31004676 4/2006
24
CHS: Configuración de Hot standbyPresentación
Introducción En este capítulo se describe la instrucción CHS.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 168
Representación: CHS - Configuración de Hot Standby 169
Descripción detallada 171
167

CHS: Configuración de Hot standby
Descripción breve
Descripción de la función
La lógica en la instrucción cargable CHS es el motor que maneja la función Hot Standby en el sistema de un PLC Quantum. Al contrario que en el caso de la instrucción HSBY, el uso de la instrucción CHS en el programa Ladder Logic es opcional. En cualquier caso, deberá instalarse el software cargable en el PLC Quantum para poder poner en marcha un sistema Hot Standby.
Nota: Esta instrucción sólo estará disponible si ha expandido e instalado las instrucciones cargables DX; encontrará más información en el capítulo p. 107."
168 31004676 4/2006

CHS: Configuración de Hot standby
Representación: CHS - Configuración de Hot Standby
Símbolo Representación de la instrucción.
CHS
longitud
áreano transferible
registro decomando
ENTRADA DE CONTROL ACTIVO
CONFIG DE EXT. PRESENTEHABILITAR ÁREA NOTRANSFERIBLE
ERRORREGISTRO DE COMANDO
Longitud: 4 – 8.000 registros
31004676 4/2006 169

CHS: Configuración de Hot standby
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior 0x, 1x Ninguno Ejecutar Hot standby (incondicionalmente).
Entrada intermedia
0x, 1x Ninguno Activo = habilitar registro de comando.
Entrada inferior 0x, 1x Ninguno Activo = habilitar área no transferible.Inactivo = el área no transferible no se utilizará y no existirá el registro de estado de Hot Standby.
Registro de comando(asiento superior)
4x INT, UINT, WORD
Registro de comando Hot Standby.Para obtener información más detallada consulte p. 172".
Área no transferible(asiento intermedio)
4x INT, UINT, WORD
Primer registro en el área no transferible de la memoria de señal.Para obtener información más detallada consulte p. 173".
Longitud(asiento inferior)
INT, UINT Número de registros del área no transferible de Hot Standby en la memoria de señal; rango 4 a 8.000.
Salida superior 0x Ninguno Refleja el estado de la entrada superior.
Salida intermedia
0x Ninguno Activo = el sistema detecta un error de interfase.
Salida inferior 0x Ninguno Activo = configuración del sistema establecida por extensión de configuración.
170 31004676 4/2006

CHS: Configuración de Hot standby
Descripción detallada
Configuración del sistema Hot Standby mediante la instrucción CHS
Programe la instrucción CHS en la red 1, segmento 1 de su programa Ladder Logic y conecte incondicionalmente la entrada superior a la barra de alimentación mediante una conexión horizontal (puesto que la instrucción HSBY está programada en un sistema Hot Standby 984).
Este método es especialmente útil cuando se transporta un código Hot Standby desde una aplicación 984 a una aplicación Quantum. La estructura de la instrucción CHS es casi la misma que la de la instrucción HSBY. Simplemente tendrá que retirar la instrucción HSBY de Ladder Logic 984 y sustituirla por una instrucción CHS en la lógica Quantum.
Si utiliza la instrucción CHS en Ladder Logic, la única diferencia con la instrucción HSBY será la utilización de la salida inferior. Esta salida detecta si se ha utilizado o no el método 2. Si se han utilizado las pantallas de extensión de configuración Hot Standby para definir la configuración Hot Standby, los parámetros de configuración en las pantallas sobrescribirán cualquier parámetro distinto definido por la instrucción CHS al arrancar el sistema.
Para obtener información detallada acerca de los temas relacionados con las funciones de extensión de configuración de un sistema Hot Standby de Quantum, consulte el Manual para la planificación e instalación de Hot Standby Quantum.
Descripción de parámetros - Ejecutar Hot Standby (entrada superior)
Cuando se introduce la instrucción CHS en Ladder Logic para controlar los parámetros de configuración Hot Standby, su entrada superior debe estar conectada directamente a la barra de alimentación mediante una conexión horizontal. No se debe colocar ninguna lógica de control, como, por ejemplo, contactos, entre la barra de alimentación y la entrada al asiento superior.
Comportamiento irregular del sistema Hot StandbyAunque está permitido habilitar y desactivar el área no transferible mientras el sistema Hot Standby se está ejecutando, desaconsejamos esta práctica. Puede provocar un comportamiento irregular en el sistema Hot Standby.
Si no se respetan estas precauciones pueden producirse graves lesiones, daños materiales o incluso la muerte.
ADVERTENCIA
31004676 4/2006 171

CHS: Configuración de Hot standby
Descripción de parámetros - Registro de comando (asiento superior)
El registro 4x introducido en el asiento superior es el registro de comando Hot Standby. En este registro se utilizan ocho bits para configurar y controlar los parámetros del sistema Hot Standby.
Utilización de la palabra de comando.
Bit Función
1 - 5 No utilizados.
6 0 = intercambiar dirección del puerto Modbus 3 al conmutar.1 = no intercambiar.
7 0 = intercambiar dirección del puerto Modbus 2 al conmutar.1 = no intercambiar.
8 0 = intercambiar dirección del puerto Modbus 1 al conmutar.1 = no intercambiar.
9 - 11 No utilizados.
12 0 = permitir actualización de Exec sólo después de que se detenga la aplicación.1 = permitir la actualización sin detener la aplicación.
13 0 = forzar Standby Offline, en caso de aparecer una discrepancia de lógica.1 = no forzar.
14 0 = el controlador B se encuentra en modo OFFLINE.1 = el controlador B se encuentra EN MARCHA.
15 0 = el controlador A se encuentra en modo OFFLINE.1 = el controlador A se encuentra EN MARCHA.
16 0 = desactivar sobrescritura de conmutador llave.1 = habilitar la sobrescritura.
Nota: El registro de comando Hot Standby debe estar fuera del área no transferible de la memoria de señal.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
172 31004676 4/2006

CHS: Configuración de Hot standby
Descripción de parámetros - Área no transferible (asiento intermedio)
El registro 4x introducido en el asiento intermedio es el primer registro del área no transferible de la memoria de señal. El área no transferible debe contener al menos cuatro registros. Los tres primeros deben tener un uso predefinido.
El contenido de los restantes registros es específico de la aplicación; la longitud está definida en el parámetro "longitud" (asiento inferior).
Los registros 4x del área no transferible nunca se transfieren del PLC primario al standby durante los ciclos lógicos. Un motivo para programar registros adicionales en el área no transferible es reducir el impacto de la transferencia de memoria de señal en el tiempo de ciclo total del sistema.
Registro de estado CHS
Utilización de la palabra de estado.
Registro Contenido
Visualizado y primer implícito
Registros de transferencia inversa para pasar información del standby al PLC primario.
Segundo implícito Registro de estado CHS
Bit Función
1 1 = la salida superior está activa (lo que indica que el sistema Hot Standby está activo).
2 1 = la salida intermedia está activa (lo que indica un estado de error).
3 - 10 No utilizados.
11 0 = el conmutador del PLC está establecido en A.1 = el conmutador del PLC está establecido en B.
12 0 = hay coincidencia con la lógica del PLC.1 = hay una discrepancia de lógica.
13 - 14 El valor de los 2 bits es:0 1 si el otro PLC se encuentra en modo OFFLINE.1 0 si el otro PLC está funcionando en modo primario.1 1 si el otro PLC está funcionando en modo standby.
15 - 16 El valor de los 2 bits es:0 1 si este PLC se encuentra en modo OFFLINE.1 0 si este PLC está funcionando en modo primario.1 1 si este PLC está funcionando en modo standby.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
31004676 4/2006 173

CHS: Configuración de Hot standby
174 31004676 4/2006

31004676 4/2006
25
CKSM: Suma de controlPresentación
Introducción En este capítulo se describe la instrucción CKSM.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 176
Representación: CKSM - Suma de control 177
Descripción de los parámetros 179
175

CKSM: Suma de control
Descripción breve
Descripción de la función
Hay varios PLC que no admiten Modbus Plus y que cuentan con una instrucción de suma de control estándar (CKSM). La instrucción CKSM tiene el mismo código operacional que la instrucción MSTR y no se proporciona en firmware executive para los PLC que admiten Modbus Plus.
176 31004676 4/2006

CKSM: Suma de control
Representación: CKSM - Suma de control
Símbolo Representación de la instrucción.
CKSM
longitud
resultado/cantidad
fuente
ENTRADA DE CONTROL SUMA DE CONTROL COMPLETADA
SELECCIÓN CKSM 2
Longitud: 1 - 255 registros
SELECCIÓN CKSM 1 CANTIDAD DE REGISTROS IMPLÍCITOS > LONGITUDoCANTIDAD DE REGISTROS IMPLICITOS = 0
31004676 4/2006 177

CKSM: Suma de control
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior 0x, 1x Ninguno Comienza a calcular la suma de control de la tabla de fuente. Para obtener información más detallada consulte "Descripción de los parámetros: p. 179".
Entrada intermedia
0x,1x Ninguno Selección CKSM 1. Para obtener información más detallada consulte "Descripción de los parámetros: p. 179".
Entrada inferior 0x, 1x Ninguno Selección CKSM 2. Para obtener información más detallada consulte "Descripción de los parámetros: p. 179".
Fuente(asiento superior)
4x INT, UINT
Primer registro de salida de la tabla de fuente. El cálculo de la suma de control se realiza en los registros de esta tabla.
Resultado/cantidad(asiento intermedio)
4x INT, UINT
Primero de dos registros contiguos.Para obtener información más detallada consulte p. 179".
Longitud(asiento inferior)
INT Número de registros 4x en la tabla de fuente, rango: 1 a 255
Salida superior 0x Ninguno Activo = cálculo de suma de control satisfactorio.
Salida intermedia 0x Ninguno Activo = cantidad de registros implícitos > longitud o cantidad de registros implícitos = 0.
178 31004676 4/2006

CKSM: Suma de control
Descripción de los parámetros
Entradas El estado de las entradas indica el tipo de cálculo de suma de control que se ha de realizar.
Resultado/cantidad (asiento intermedio)
El registro 4x introducido en el asiento intermedio es el primero de dos registros 4x contiguos.
Cálculo CKSM Entrada superior Entrada intermedia Entrada inferior
Control directo Activo Inactivo Activo
Control de adición binaria Activo Activo Activo
CRC-16 Activo Activo Inactivo
LRC Activo Inactivo Inactivo
Registro Contenido
Visualizado Guarda el resultado del cálculo de la suma de control.
Primer implícito Coloca un valor que especifica el número de registros seleccionados de la tabla de fuente como entrada del cálculo. El valor colocado en el registro implícito debe ser ≤ longitud de la tabla de fuente.
31004676 4/2006 179

CKSM: Suma de control
180 31004676 4/2006

31004676 4/2006
26
CMPR: Comparar registroPresentación
Introducción En este capítulo se describe la instrucción CMPR.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 182
Representación: CMPR - Comparación lógica 183
Descripción de los parámetros 185
181

CMPR: Comparar registro
Descripción breve
Descripción de la función
La instrucción CMPR compara el modelo de bits de la matriz a con el modelo de bits de la matriz b, con el fin de descubrir las discrepancias. En un único ciclo, se comparan una a una cada posición de bit en las dos matrices, hasta encontrar una discrepancia o alcanzar el final de las matrices (sin discrepancias).
182 31004676 4/2006

CMPR: Comparar registro
Representación: CMPR - Comparación lógica
Símbolo Representación de la instrucción.
CMPR
longitud
registro de pointer
(matriz b)
matriz a
ENTRADA DE CONTROL ACTIVO
ESTADO DE LA DISCREPANCIA
Longitud: 1 a 100 registros(16 a 1.600 bits)
DISCREPANCIARESTABLECER POINTER
Primer registro odirección binariade la matriz
31004676 4/2006 183

CMPR: Comparar registro
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior 0x, 1x Ninguno Activo = inicia la operación de comparación.
Entrada intermedia 0x, 1x Ninguno Inactivo = reinicio a partir de la última discrepancia. Activo = reinicio desde el principio.
Matriz a(asiento superior)
0x, 1x, 3x, 4x ANY_BIT Primera referencia en la matriz a, una de las dos matrices que van a compararse.
Registro de pointer(asiento intermedio)
4x WORD Pointer a matriz b: el primer registro de la matriz b es el registro 4x contiguo siguiente al registro del pointer.
Longitud(asiento inferior)
INT, UINT
Longitud de la matriz; rango: 1 a 100
Salida superior 0x Ninguno Refleja el estado de la entrada superior.
Salida intermedia 0x Ninguno Activo = se ha detectado una discrepancia en la comparación.
Salida inferior 0x Ninguno Activo = el bit distinto en la matriz a es 1. Inactivo = el bit distinto en la matriz a es 0.
184 31004676 4/2006
CMPR: Comparar registro
Descripción de los parámetros
Registro de pointer (asiento intermedio)
El registro de pointer introducido en el asiento intermedio tiene que ser un registro de salida 4x. Se trata del pointer a la matriz b, es decir, la otra matriz que va a compararse. El primer registro de la matriz b es el registro 4x contiguo siguiente al registro de pointer.
El valor almacenado dentro del registro de pointer se incrementa con cada posición de bit comparada en las dos matrices. Cuando se compara la posición de bit 1 de la matriz a y de la matriz b, el registro de pointer contiene un valor de 1; cuando se compara la posición de bit 2 en ambas matrices, el valor en el registro de pointer se incrementa a 2, etc.
Cuando la salida indica una discrepancia, se puede verificar la cantidad acumulada en el registro de pointer para determinar la posición de bit en las matrices de la discrepancia.
Longitud de la matriz (asiento inferior)
El valor entero introducido en el asiento inferior especifica una longitud de las dos matrices, es decir, el número de registros o de palabras de 16 bits que hay en cada matriz. Las matrices a y b tienen la misma longitud. La longitud de la matriz puede ir de 1 a 100; es decir, una longitud de 2 significa que las matrices a y b contienen 32 bits.
31004676 4/2006 185

CMPR: Comparar registro
186 31004676 4/2006

31004676 4/2006
27
CoilsPresentación
Introducción Este capítulo describe el elemento de instrucción Coils.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve: Bobinas 188
Directrices generales de uso: Coils 189
187

Coils
Descripción breve: Bobinas
Descripción de la función
Una bobina es una salida binaria que se activa y desactiva según el flujo de señal en el programa lógico. Una bobina simple se vincula a una referencia 0xxxx en la memoria de señal del PLC. Debido a que los valores de salida se actualizan en la memoria de señal del PLC, se puede usar una bobina de forma interna en el programa lógico, o de forma externa a través de la asignación de E/S con una unidad de salida binaria en el sistema de control. Cuando una bobina esté activa, transmitirá la señal a un circuito de salida binario o cambiará el estado de un contacto de relé interno de la memoria de señal.
Tipos de bobina Existen dos tipos de bobinas:Bobina normal -( )- Una bobina normal o no retentiva pierde el estado cuando el controlador deja de recibir alimentación. Cuando se elimina la alimentación al PLC, una bobina normal se desactiva. Al restaurar la alimentación, la bobina permanecerá inactiva durante el primer ciclo lógico.Bobina retentiva de memoria o con retención -(M)- o -(L)- Este tipo de bobina NO pierde el estado cuando el controlador deja de recibir alimentación. Si una bobina retentiva de memoria (o con retención) está activa cuando el PLC pierde la alimentación, volverá a encontrarse en ese mismo estado cuando se restaure la alimentación. La bobina mantendrá el estado activo durante el primer ciclo lógico y, a continuación, el programa lógico tomará el control.
Las bobinas reciben una referencia como 0xxxx. Es posible bloquearlas y activarlas o desactivarlas. Al bloquear una bobina, se impide que la lógica programada por el usuario cambie el estado de dicha bobina.
Nota: Los bloques de función DX pueden sobrescribir el estado de las bobinas bloqueadas que se utilizan como destinos.
188 31004676 4/2006

Coils
Directrices generales de uso: Coils
Vista general Una vez asignado un número de referencia 0x a una bobina, no podrá asignarse a ninguna otra en el programa lógico.
Un número de referencia 0x puede referenciarse para cualquier número de contactos de relé, que pueden controlarse mediante el estado de la bobina con el mismo número de referencia. La mayor parte de los paquetes de software disponen de una función de seguimiento donde el usuario puede localizar en Ladder Logic las posiciones de los contactos controlados por una bobina. Para obtener más información, consulte el manual del usuario de software.
Habilitar/Desactivar capacidades de valores binarios
Mediante el software de panel, puede desactivar una bobina lógica o una entrada binaria en el programa lógico.
Una condición de desactivación provocará lo siguiente:El dispositivo de campo entrada no tendrá ningún control sobre su lógica 1x asignada.La lógica no tendrá control sobre el valor 9x desactivado.
La protección de memoria del PLC debe estar inactiva antes de desactivar o habilitar una bobina o una entrada binaria.
Forzado de registros binarios a activos o inactivos
La mayor parte del software de panel también proporciona capacidades de forzar a activo e inactivo. Cuando una bobina o entrada binaria está desactivada, puede cambiar el estado de inactivo a activo con la capacidad de FORCE ON o FORCE OFF.
Cuando una bobina o entrada binaria está habilitada, no puede forzarse aactivo o inactivo.
Nota: Existe una excepción importante que es necesario tener en cuenta a la hora de desactivar bobinas:Las funciones de transferencia de datos permiten que las bobinas reconozcan en sus asientos de destino el estado activo/inactivo actual de todas las bobinas, independientemente de si están desactivadas o no. Este reconocimiento hace que la lógica responda consecuentemente (quizá reproduciendo efectos inesperados y no deseados).Si espera que una bobina desactivada permanezca en dicho estado en la función DX, la aplicación puede sufrir efectos inesperados y no deseados.
31004676 4/2006 189

Coils
190 31004676 4/2006

31004676 4/2006
28
COMM - Función de comunicaciones ASCIIPresentación
Introducción En este capítulo se describe la instrucción COMM.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve: COMM - Bloque de comunicaciones ASCII 192
Representación: COMM - Función de comunicaciones ASCII 193
191

COMM - Función de comunicaciones ASCII
Descripción breve: COMM - Bloque de comunicaciones ASCII
Descripción de la función
El bloque de función de comunicaciones ASCII (COMM) se utiliza para transmitir/recibir datos ASCII (en forma de un solo carácter ASCII, de 1 a 4 números enteros o de 1 a 4 hexadecimales) dirigidos o procedentes de un solo puerto ASCII. La instrucción COMM permite leer y escribir mensajes preestablecidos dirigidos o procedentes de equipos de entrada o salida de caracteres ASCII a través de uno de los puertos de comunicaciones incorporados en un PLC Micro o, en caso de que el PLC sea primario, a través de un puerto de comunicaciones en uno de los PLC secundarios en el vínculo de expansión.
Nota: Disponible únicamente en los controladores 311, 411, 512 y 612 Micro.
192 31004676 4/2006

COMM - Función de comunicaciones ASCII
Representación: COMM - Función de comunicaciones ASCII
Símbolo Representación de la instrucción.
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
ENTRADA DE CONTROL
INTERRUMPIR
ACTIVO
ERROR
CORRECTO
bloque de
control
bloquede
datos
COMM
longitud(3 ... 255)Tamaño del campo de datos: 3 - 255
Origen para escritura/destino para lectura
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior 0x, 1x Ninguno En estado activo inicia la operación COMM.
Entrada inferior 0x, 1x Ninguno En estado activo detiene la operación y establece la salida intermedia.
Bloque de control(asiento superior)
4x INT, UINT
El registro 4xxxx introducido en el asiento superior es el primero de diez registros de salida contiguos del bloque de control. Para obtener información sobre la utilización de los registros, consulte la Tabla de utilización de registros que aparece a continuación.
31004676 4/2006 193

COMM - Función de comunicaciones ASCII
Tabla de utilización de registros
En esta tabla se detalla la utilización de registros para el asiento superior.
Bloque de datos(asiento intermedio)
4x INT, UINT
El asiento intermedio contiene el primer registro 4xxxx del bloque de datos; una tabla en la que se insertan datos de mensajes de variables. En una operación de lectura, el bloque de datos es una tabla de destino. En una operación de escritura, el bloque de datos es una tabla de fuente.
Longitud(asiento inferior)
INT, UINT
El valor entero que se ha introducido en el asiento inferior especifica la longitud, es decir, el número de registros del bloque de datos. La longitud puede ir de 3 a 255.
Salida superior 0x Ninguno Refleja el estado de la entrada superior.
Salida intermedia
0x Ninguno Activo = error detectado (para un ciclo).
Salida inferior 0x Ninguno Activo = operación completada (para un ciclo).
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Registro Utilización
4xxxx + 0 Código de operación
4xxxx + 1 Estado de error
4xxxx + 2 Número de campos de datos proporcionados/esperados
4xxxx + 3 Número de campos de datos procesados
4xxxx + 4 Reservado
4xxxx + 5 Número de puerto (1 para puerto local, 2 para el puerto secundario nº 1, 3 para el puerto secundario nº 2, etc.)
4xxxx + 6 Reservado
4xxxx + 7 Reservado
4xxxx + 8 Reservado
4xxxx + 9 Temporizador de estado activo
194 31004676 4/2006

31004676 4/2006
29
COMP: Complementar una matrizPresentación
Introducción En este capítulo se describe la instrucción COMP.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 196
Representación: COMP - Complemento lógico 197
Descripción de los parámetros 199
195

COMP: Complementar una matriz
Descripción breve
Descripción de la función
La instrucción COMP complementa el modelo de bits, es decir, cambia todos los ceros a unos y todos los unos a ceros en una matriz de fuente y, a continuación, copia el modelo de bits complementado en la matriz de destino. La operación completa COMP se realiza en un ciclo.
Sobrescritura de las bobinas bloqueadas en la matriz de destino sin habilitarlas.COMP sobrescribirá las bobinas bloqueadas dentro de una matriz de destino sin habilitarlas. Esto puede provocar daños si se ha bloqueado una bobina para su reparación o mantenimiento, ya que el estado de la bobina puede cambiar como resultado de una instrucción COMP.
Si no se respetan estas precauciones pueden producirse graves lesiones, daños materiales o incluso la muerte.
ADVERTENCIA
196 31004676 4/2006
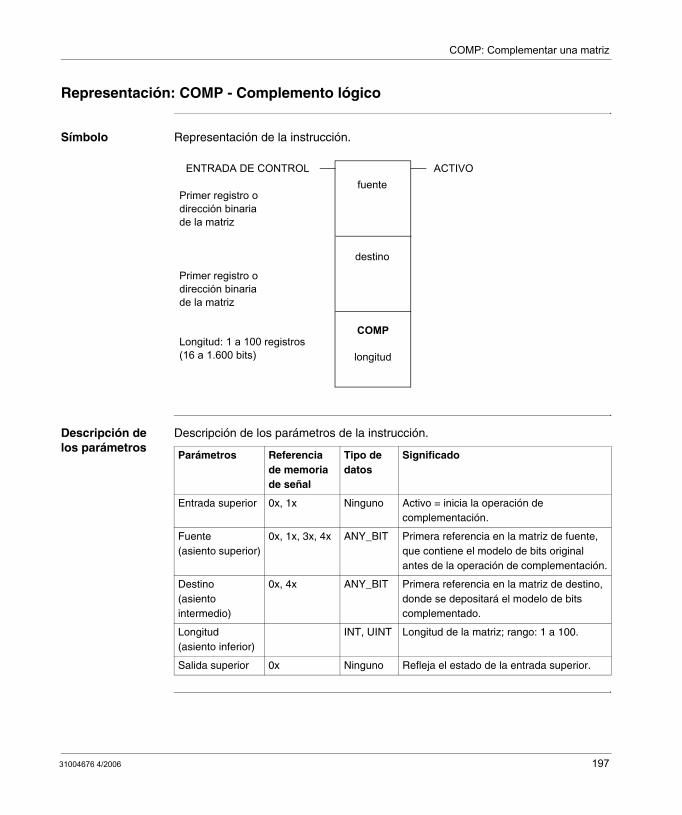
COMP: Complementar una matriz
Representación: COMP - Complemento lógico
Símbolo Representación de la instrucción.
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
COMP
longitud
destino
fuenteENTRADA DE CONTROL ACTIVO
Longitud: 1 a 100 registros(16 a 1.600 bits)
Primer registro odirección binariade la matriz
Primer registro odirección binariade la matriz
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior 0x, 1x Ninguno Activo = inicia la operación de complementación.
Fuente(asiento superior)
0x, 1x, 3x, 4x ANY_BIT Primera referencia en la matriz de fuente, que contiene el modelo de bits original antes de la operación de complementación.
Destino(asiento intermedio)
0x, 4x ANY_BIT Primera referencia en la matriz de destino, donde se depositará el modelo de bits complementado.
Longitud(asiento inferior)
INT, UINT Longitud de la matriz; rango: 1 a 100.
Salida superior 0x Ninguno Refleja el estado de la entrada superior.
31004676 4/2006 197

COMP: Complementar una matriz
Ejemplo de COMP
Cuando el contacto 10001 transfiere señal, el modelo de bits de la matriz de fuente (registros 40600 y 40601) se complementa y, a continuación, se deposita en la matriz de destino (registros 40602 y 40603). El modelo de bits original se mantiene en la matriz de fuente.
matriz de fuente40600 = 1111111100000000 40601 = 1111111100000000
matriz de destino completada40602 = 000000011111111 40603 = 0000000011111111
40600
40602
00002
10001
COMP
198 31004676 4/2006

COMP: Complementar una matriz
Descripción de los parámetros
Longitud de la matriz (asiento inferior)
El valor entero que se ha introducido en el asiento inferior especifica la longitud de la matriz, es decir, el número de registros o de palabras de 16 bits que hay en las dos matrices. La longitud de la matriz puede ir de 1 a 100. Una longitud 2 indica que se complementarán 32 bits en cada matriz.
31004676 4/2006 199

COMP: Complementar una matriz
200 31004676 4/2006

31004676 4/2006
30
ContactsPresentación
Introducción Este capítulo describe el elemento de instrucción Contacts.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve: contactos 202
Representación: Contacts 203
201

Contacts
Descripción breve: contactos
Descripción de la función
Los contactos se utilizan para transmitir o inhibir el flujo de señal en un programa de Ladder Logic.
202 31004676 4/2006

Contacts
Representación: Contacts
Descripción de la función
Son valores binarios, es decir, cada uno requiere un punto de E/S en Ladder Logic. Un contacto simple puede vincularse a un número de referencia 0x o 1x en la memoria de señal del PLC, en cuyo caso cada contacto ocuparía un asiento en la red escalonada.
Se dispone de cuatro clases de contactos:Contactos de tipo normal abierto (N.O.)Contactos de tipo normal cerrado (N.C.)Contactos de detección de transición positiva (P.T.)Contactos de detección de transición negativa (N.T.)
Referencias a contactos de tipo normal abierto o cerrado
Los contactos de tipo normal abierto -| |- y normal cerrado -|\|- pueden referenciarse por medio de entradas (1xxxx) o bobinas (0xxxx).
Referencias a contactos de detección de transición
Los contactos de detección de transición positiva -| ↑ |- y negativa -| ↓ |- pueden referenciarse por medio de entradas (1xxxx) o bobinas (0xxxx).
Estado de sensores en relación con el flujo de contactos programados
Sensor Contacto programado Contacto de campo cerrado Contacto de campo abierto
-| |- -| |- Transfiere señal
-|\|- Transfiere señal
-|\|- -| |- Transfiere señal
Transfiere señal
Transición de tabla de estado Flujo de señal en la transición
-|↑|- Inactivo a activo Activo 1 señal de ciclo
-|↓|- Activo a inactivo Inactivo Pulso de flujo
Nota: Un contacto de detección de transición transferirá señales continuamente si el administrador de segmentos o una instrucción SKP se saltan la bobina referenciada. Por el contrario, un contacto de este tipo no transferirá señales si está referenciado a una entrada que haya sido programada para realizar más de una lectura por ciclo en la estación de E/S a través del administrador de segmentos.
31004676 4/2006 203

Contacts
204 31004676 4/2006

31004676 4/2006
31
CONV - Convertir datosPresentación
Introducción En este capítulo se describe la instrucción CONV.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve: CONV - Convertir datos 206
Representación: CONV - Convertir datos 207
205

CONV - Convertir datos
Descripción breve: CONV - Convertir datos
Función El bloque Convert es una instrucción de reemplazo 484 y forma parte de una de las cuatro instrucciones de reemplazo. El bloque CONV se utiliza para convertir.
Datos binarios para un registro de salida.Datos de registros de salida para datos binarios.
La conversión puede ser:
Binario a binario.BCD a binario (de registro binario a registro).Binario a BCD (de registro a registro binario).
Este bloque utiliza entradas y salidas de 12 bits; sin embargo, si la conversión es directamente de binario a binario, los bits 11 y 12 se desactivan.
Al convertir registros binarios en registros de salida, el origen se especifica como una constante que implica un 1xxxx y el destino se especifica como una constante que implica un 4xxxx (por ejemplo, 00049 implica 40049).
Al convertir un registro en registros de salida binarios, el origen se especifica como registro de salida (4xxxx) y el destino como una constante que implica 0xxxx. Por ejemplo, 00032 implica 12 bobinas con 00032.
Importante: Debe prestarse atención a la hora de convertir datos de registros en registros binarios, ya que pueden activarse inadvertidamente las bobinas.
Nota: Disponible únicamente en los modelos de PLC 984-351 y 984-455.
206 31004676 4/2006

CONV - Convertir datos
Representación: CONV - Convertir datos
Símbolo Representación de la instrucción.
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
ENTRADA DE CONTROL
CONVERSIÓN
COMPLETO
Activo = binarioInactivo = BCD
fuente
CONV
nº de registro
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno En estado activo inicia la operación especificada.
Entrada inferior 0x, 1x Ninguno Activo = binario.Inactivo = BCD.
Fuente(asiento superior)
4x INT, UINT Convierte el contenido del registro.
Registro(asiento inferior)
3x INT, UINT
Salida superior 0x Ninguno Operación correcta.
31004676 4/2006 207

CONV - Convertir datos
208 31004676 4/2006

31004676 4/2006
32
CTIF - Contador, temporizador, función de interruptPresentación
Introducción En este capítulo se describe la instrucción CTIF.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve: CTIF - Contador, temporizador y función de interrupt 210
Representación: CTIF - Contador, temporizador, función de interrupt 211
Descripción de parámetros: CTIF - Tabla de utilización de registros (asiento superior)
212
209

CTIF - Contador, temporizador y función de interrupt
Descripción breve: CTIF - Contador, temporizador y función de interrupt
Descripción de la función
El bloque CTIF es utilizado por un PLC primario para acceder a funciones secundarias a través de un bus de expansión de E/S. El bloque de función principal se completará en el mismo ciclo. En caso de que existan varios bloques, se utilizará el último ejecutado.
Las instrucción CTIF se utiliza con los PLC Micro para configurar las entradas de un interrupt cableado u operaciones de contador/temporizador cableados. Esta instrucción siempre comienza y finaliza en el mismo ciclo. La instrucción CTIF es una herramienta de configuración/funcionamiento para PLC Micro Modicon que contiene interrupts de hardware (todos los modelos excepto 110CPU311). El contador, temporizador e interrupts están en el hardware del PLC y la instrucción CTIF es la que se utiliza para configurar este hardware.
Nota: La función de contador, temporizador e interrupt (CTIF) sólo está disponible en controladores Micro 311, 411, 512 y 612.
210 31004676 4/2006

CTIF - Contador, temporizador y función de interrupt
Representación: CTIF - Contador, temporizador, función de interrupt
Símbolo Representación de la instrucción.
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
ENTRADA DE CONTROL ACTIVO
Rango: 1 ... 5
n° de registro
CTIF
número de estación
ERROR
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno En estado activo inicia la operación especificada.
N° de registro(asiento superior)
4x INT El registro 4xxxx introducido en el asiento superior es el primero de cuatro registros de salida contiguos del bloque de parámetros CTIF. Para obtener información más detallada sobre los cuatro registros, consulte la sección p. 212".
Número de estación(asiento inferior)
INT El valor entero introducido en el asiento inferior indica el número de la estación en la que se va a realizar la operación. El número de estación puede ir de 1 a 5.
Salida superior 0x Ninguno Refleja el estado de la entrada superior.
Salida inferior 0x Ninguno Error.
31004676 4/2006 211
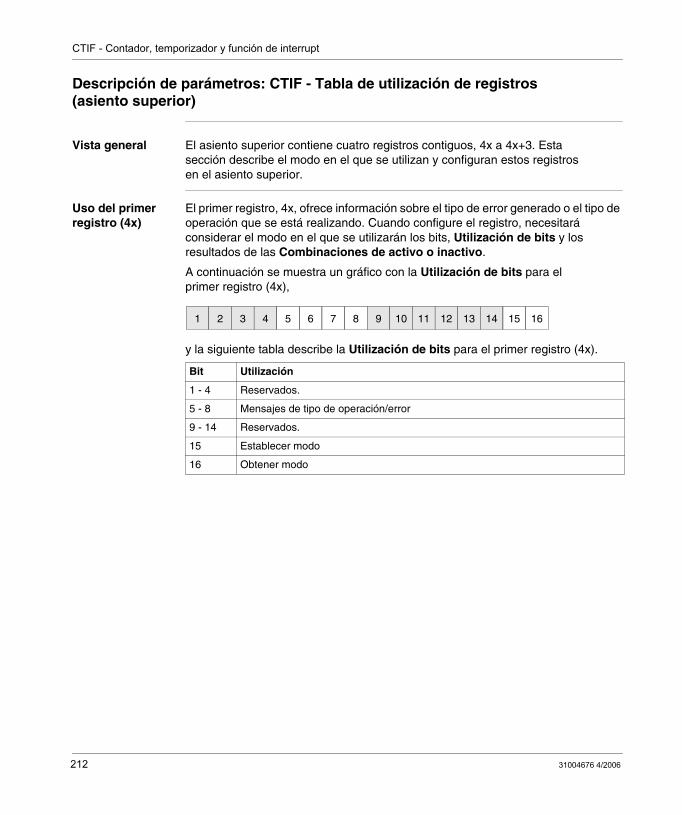
CTIF - Contador, temporizador y función de interrupt
Descripción de parámetros: CTIF - Tabla de utilización de registros (asiento superior)
Vista general El asiento superior contiene cuatro registros contiguos, 4x a 4x+3. Esta sección describe el modo en el que se utilizan y configuran estos registros en el asiento superior.
Uso del primer registro (4x)
El primer registro, 4x, ofrece información sobre el tipo de error generado o el tipo de operación que se está realizando. Cuando configure el registro, necesitará considerar el modo en el que se utilizarán los bits, Utilización de bits y los resultados de las Combinaciones de activo o inactivo.
A continuación se muestra un gráfico con la Utilización de bits para el primer registro (4x),
y la siguiente tabla describe la Utilización de bits para el primer registro (4x).
Bit Utilización
1 - 4 Reservados.
5 - 8 Mensajes de tipo de operación/error
9 - 14 Reservados.
15 Establecer modo
16 Obtener modo
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
212 31004676 4/2006

CTIF - Contador, temporizador y función de interrupt
La siguiente tabla describe las Combinaciones de activo o inactivo para los bits 5 a 8 y el mensaje de tipo de error/operación generados por el primer registro (4x).
La siguiente tabla describe la Utilización de bits y las combinaciones de activo e inactivo para los bits 15 y 16 del primer registro (4x).
Utilización del segundo registro (4x+1)
El segundo registro, 4x+1, permite controlar la configuración del funcionamiento de la operación Establecer modo. Cuando configure el registro, necesitará considerar el modo en el que se utilizarán los bits, Utilización de bits y los resultados de las Combinaciones de activo o inactivo.
A continuación se muestra un gráfico con la Utilización de bits para el segundo registro (4x+1).
La siguiente tabla describe la Utilización de bits y las Combinaciones de activo e inactivo para los bits 1 a 16 del segundo registro (4x+1).
Bit 5 6 7 8 Descripción
0 0 0 0 No se detectó ningún error.
0 0 0 1 Se ha especificado un tipo de operación no apoyada.
0 0 1 0 Interrupt 2 no apoyado en este modelo.
0 0 1 1 Interrupt 3 no apoyado mientras se selecciona el contador.
0 1 0 0 Se ha especificado el valor del contador de 0.
0 1 0 1 Valor del contador demasiado grande (valor del contador > 16.383).
0 1 1 0 Tipo de operación apoyado únicamente en estación local.
0 1 1 1 La estación especificada no existe en la asignación de E/S.
1 0 0 0 Sin subrutina para interrupt habilitado.
1 0 0 1 Estación remota con funcionamiento incorrecto.
1 0 1 0 Función no apoyada de forma remota.
Bit 15 16 Descripción
0 0 Establecer modo
0 1 Obtener modo
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
31004676 4/2006 213

CTIF - Contador, temporizador y función de interrupt
La siguiente tabla describe la Utilización de bits y las Combinaciones de activo e inactivo para los bits 1 y 2 del segundo registro (4x+1).
La siguiente tabla describe la Utilización de bits y las Combinaciones de activo e inactivo para los bits 3 y 4 del segundo registro (4x+1).
La siguiente tabla describe la Utilización de bits y las Combinaciones de activo e inactivo para los bits 5 y 6 del segundo registro (4x+1).
La siguiente tabla describe la Utilización de bits y las Combinaciones de activo e inactivo para los bits 7 y 8 del segundo registro (4x+1).
La siguiente tabla describe la Utilización de bits y las Combinaciones de activo e inactivo para los bits 9 y 10 del segundo registro (4x+1).
La siguiente tabla describe la Utilización de bits y las Combinaciones de activo e inactivo para los bits 11 y 12 del segundo registro (4x+1).
Bit Utilización
1 Carga del conteo del terminal.0 - Bloqueada1 - Habilitada
2 Reservado
Bit 3 4 Descripción
0 1 Bloquear servicio interrupt para Interrupt 3.
1 0 Habilitar servicio interrupt para Interrupt 3.
Bit 5 6 Descripción
0 1 Bloquear servicio interrupt para Interrupt 2.
1 0 Habilitar servicio interrupt para Interrupt 2.
Bit 7 8 Descripción
0 1 Bloquear servicio interrupt para Interrupt 1.
1 0 Habilitar servicio interrupt para Interrupt 1.
Bit 9 10 Descripción
0 1 Bloquear servicio interrupt para interrupt de temporizador/contador.
1 0 Habilitar servicio interrupt para interrupt de temporizador/contador.
Bit 11 12 Descripción
0 1 Bloquear operación de reinicio automático.
1 0 Habilitar operación de reinicio automático.
214 31004676 4/2006

CTIF - Contador, temporizador y función de interrupt
La siguiente tabla describe la Utilización de bits y las Combinaciones de activo e inactivo para los bits 13 y 14 del segundo registro (4x+1).
La siguiente tabla describe la Utilización de bits y las Combinaciones de activo e inactivo para los bits 15 y 16 del segundo registro (4x+1).
Utilización del tercer registro (4x+2)
El tercer registro, 4x+2, proporciona el estado para la operación Obtener modo. Cuando configure el registro, necesitará considerar el modo en el que se utilizarán los bits, Utilización de bits y los resultados de las Combinaciones de activo o inactivo.
A continuación se muestra un gráfico con la Utilización de bits para el tercer registro (4x+2).
La siguiente tabla describe la Utilización de bits y las Combinaciones de activo e inactivo para los bits de 1 a 16 del tercer registro (4x+2).
Bit 13 14 Descripción
0 1 Detener operación de temporizador/contador.
1 0 Iniciar operación de temporizador/contador.
Bit 15 16 Descripción
0 1 Modo de contador.
1 0 Modo de temporizador.
Bit Utilización
1 Sin subrutina para interrupt 3
2 Sin subrutina para interrupt 2
3 Sin subrutina para interrupt 1
4 Sin subrutina para interrupt de temporizador/contador
5 - 9 Reservados
10 Interrupt 30 - Bloqueado1 - Habilitado
11 Interrupt 20 - Bloqueado1 - Habilitado
12 Interrupt 10 - Bloqueado1 - Habilitado
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
31004676 4/2006 215

CTIF - Contador, temporizador y función de interrupt
Utilización del cuarto registro (4x+3)
El cuarto registro marca el valor de conteo actual del interrupt de temporizador/contador. Tanto el bloque de instrucciones (ajustado automáticamente) como el usuario pueden ajustar el valor de conteo actual.
Obtener modoEl bloque de instrucciones establece el conteo actual.Establecer modoEl usuario establece el contador/temporizador.
13 Servidor interrupt para entrada de temporizador/contador0 - Bloqueado1 - Habilitado
14 Operación de reinicio automático0 - Bloqueada1 - Habilitada
15 Operación de temporizador/contador0 - Detenida1 - Iniciada
16 0 - Modo de contador1 - Modo de temporizador
Bit Utilización
216 31004676 4/2006
31004676 4/2006
33
DCTR: Contador regresivoPresentación
Introducción En este capítulo se describe la instrucción DCTR.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 218
Representación: DCTR - Contador regresivo 219
217

DCTR: Contador regresivo
Descripción breve
Descripción de la función
La instrucción DCTR realiza un conteo regresivo de las transiciones de entrada de control (de estado inactivo a activo) desde un valor de contador preestablecido hasta 0.
218 31004676 4/2006

DCTR: Contador regresivo
Representación: DCTR - Contador regresivo
Símbolo Representación de la instrucción.
*Disponible en los siguientes PLC:E685/785L785Serie Quantum
DCTR
cantidad
preajuste del contador
CONTROL CONDICIÓN DE SALIDADCTR: cantidad = cero
ACTIVAR REINICIO CONDICIÓN DE SALIDAcantidad > cero
Valor preestablecido:Máx. 999- PLC de 16 bitsMáx. 9999- PLC de 24 bitsMáx. 65535- *PLC
31004676 4/2006 219
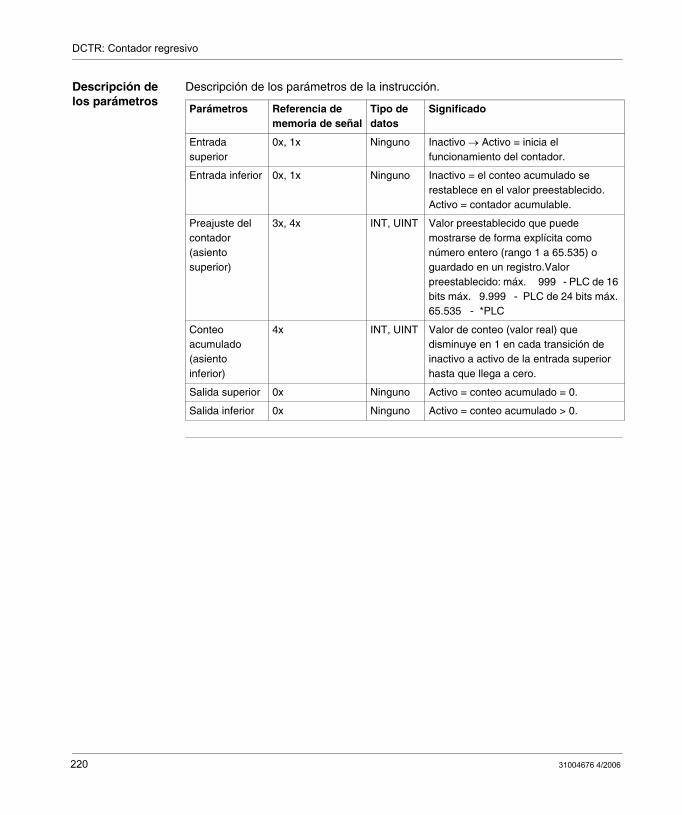
DCTR: Contador regresivo
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno Inactivo → Activo = inicia el funcionamiento del contador.
Entrada inferior 0x, 1x Ninguno Inactivo = el conteo acumulado se restablece en el valor preestablecido.Activo = contador acumulable.
Preajuste del contador(asiento superior)
3x, 4x INT, UINT Valor preestablecido que puede mostrarse de forma explícita como número entero (rango 1 a 65.535) o guardado en un registro.Valor preestablecido: máx. 999 - PLC de 16 bits máx. 9.999 - PLC de 24 bits máx. 65.535 - *PLC
Conteo acumulado(asiento inferior)
4x INT, UINT Valor de conteo (valor real) que disminuye en 1 en cada transición de inactivo a activo de la entrada superior hasta que llega a cero.
Salida superior 0x Ninguno Activo = conteo acumulado = 0.
Salida inferior 0x Ninguno Activo = conteo acumulado > 0.
220 31004676 4/2006

31004676 4/2006
34
DIOH: Estado funcional de E/S distribuidasPresentación
Introducción En este capítulo se describe la instrucción DIOH.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 222
Representación: DIOH - Estado funcional de E/S distribuidas 223
Descripción de los parámetros 225
221

DIOH: estado funcional de E/S distribuidas
Descripción breve
Descripción de la función
La instrucción DIOH permite recuperar datos de estado de funcionamiento de un grupo específico de estaciones en la red de E/S distribuidas. Da acceso a la tabla de estado de funcionamiento DIO, en la que se guardan los datos de estado de funcionamiento de los módulos en un máximo de 189 estaciones distribuidas.
222 31004676 4/2006
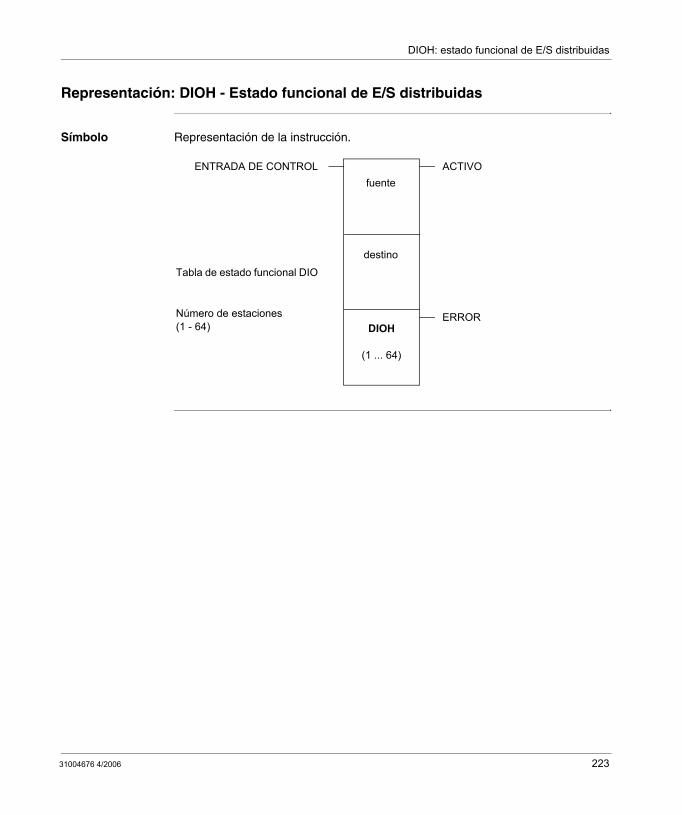
DIOH: estado funcional de E/S distribuidas
Representación: DIOH - Estado funcional de E/S distribuidas
Símbolo Representación de la instrucción.
DIOH
(1 ... 64)
destino
fuenteENTRADA DE CONTROL ACTIVO
ERRORNúmero de estaciones(1 - 64)
Tabla de estado funcional DIO
31004676 4/2006 223

DIOH: estado funcional de E/S distribuidas
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno Activo = inicia la recuperación de las palabras de estado especificadas desde la tabla de estado funcional DIO a la tabla de destino.
Fuente(asiento superior)
INT, UINT El valor fuente introducido en el asiento superior es una constante de cuatro dígitos con la forma xxyy, donde:
xx es un valor decimal en el rango que va de 00 a 16, que indica el número de slot en que está situado el procesador DIO relevante. El valor 00 siempre puede utilizarse para indicar los puertos Modbus Plus en el PLC, sin tener en cuenta el slot en queesté situado.yy es un valor decimal en el rango que va de 1 a 64, indicando el número de estación en la red token ring adecuada.
Por ejemplo, si desea recuperar el estado de una estación comenzando por la estación distribuida 1 en una red con un procesador DIO en el slot 3, introduzca 0301 en el asiento superior.
Destino(asiento intermedio)
4x INT, UINT, WORD
Primer registro de salida de la tabla de destino, es decir, en un bloque de registros contiguos en que se ha almacenado la información de estado funcional recuperada.
Longitud(asiento inferior)
INT, UINT Longitud de la tabla de destino, rango 1 a 64.
Salida superior 0x Ninguno Refleja el estado de la entrada superior.
Salida inferior 0x Ninguno Activo = entrada fuente no válida.
224 31004676 4/2006

DIOH: estado funcional de E/S distribuidas
Descripción de los parámetros
Valor de fuente (asiento superior)
El valor de fuente ingresado en el asiento superior es una constante de cuatro dígitos con la forma xxyy, en la que:
Por ejemplo, si desea recuperar el estado de una estación comenzando por la estación distribuida 1 en una red con un procesador DIO en el slot 3, ingrese 0301 en el asiento superior.
Longitud de la tabla de destino (asiento inferior)
El valor entero que se ha ingresado en el asiento inferior especifica la longitud, es decir, el número de registros 4x en la tabla de destino. La longitud debe estar comprendida entre 1 y 64.
Dígitos Significado
xx Valor decimal en el rango 00 a 16, que indica el número de slot en que está situado el procesador DIO relevante. El valor 00 siempre puede utilizarse para indicar los puertos Modbus Plus en el PLC, sin tener en cuenta el slot en que esté situado.
yy Valor decimal en el rango 1 a 64, que indica el número de estación en la red token ring adecuada.
Nota: Si especifica una longitud que excede el número de estaciones disponibles, la instrucción sólo devolverá información de estado de las estaciones disponibles. Por ejemplo, si especifica el número de la estación nº 63 (yy) en el registro de asientos y solicita una longitud de 5, la instrucción sólo le devolverá dos registros (las palabras de estado de la estación nº 63 y nº 64) en la tabla de destino.
31004676 4/2006 225

DIOH: estado funcional de E/S distribuidas
226 31004676 4/2006

31004676 4/2006
35
DISA - Control binario bloqueadoPresentación
Introducción En este capítulo se describe la instrucción DISA.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve: DISA - Control binario bloqueado 228
Representación: DISA - Control binario bloqueado 229
227

DISA - Control binario bloqueado
Descripción breve: DISA - Control binario bloqueado
Función El control binario bloqueado (DISA) es una función cargable, una instrucción que controla las bobinas y entradas bloqueadas. Por lo tanto, DISA supervisa los estados bloqueados de todas las direcciones 0xxxx y 1xxxx.
228 31004676 4/2006

DISA - Control binario bloqueado
Representación: DISA - Control binario bloqueado
Símbolo Representación de la instrucción.
Nota: Antes de cargar la instrucción cargable DISA se debe cargar la instrucción NSUP.
ENTRADA DE CONTROL BOBINAS BLOQUEADAS
ENTRADAS BLOQUEADAS
ACTIVO
bobinas
entradas
DISA
longitudLongitud: 1 a 100 registros
31004676 4/2006 229

DISA - Control binario bloqueado
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno Tabla de bobinas bloqueadas.
Bobinas(asiento superior)
4x INT, UINT Cantidad de bobinas bloqueadas que se ha encontrado (incluso si > NNN).
4x+Nº INT, UINT Dirección del ‘Nº’ de bobina bloqueada que se ha encontrado.
Entradas(asiento intermedio)
4y INT, UINT Cantidad de entradas binarias bloqueadas que se ha encontrado (incluso si > NNN).
4y+Nº INT, UINT Dirección del ‘Nº’ de entrada binaria bloqueada que se ha encontrado.
Longitud(asiento inferior)
INT, UINT Transfiere señales cuando la entrada superior las recibe.
Salida superior
0x Ninguno Se activa si se encuentran las bobinas bloqueadas.
Salida intermedia
0x Ninguno Se activa si se encuentran las entradas bloqueadas.
Salida inferior 0x Ninguno Refleja el estado de la entrada superior.
230 31004676 4/2006

31004676 4/2006
36
DIV: DivisiónPresentación
Introducción En este capítulo se describe la instrucción DIV.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 232
Representación: DIV - División de precisión simple 233
Ejemplo 235
231

DIV: División
Descripción breve
Descripción de la función
La instrucción DIV divide el valor sin signo 1 (su asiento superior) entre el valor sin signo 2 (su asiento intermedio) y envía el cociente y el resto a dos registros de salida contiguos del asiento inferior.
232 31004676 4/2006

DIV: División
Representación: DIV - División de precisión simple
Símbolo Representación de la instrucción.
*Disponible en los siguientes PLC:E685/785L785Serie Quantum
DIV
resultado/resto
valor 2
valor 1
ENTRADA DE CONTROL FINALIZACIÓN SATISFACTORIA
VALOR INTERMEDIO = 0
COCIENTE > 9.999Máx. 999- 16 bitsMáx. 9.999- 24 bitsMáx. 65.535- *PLC
RESTO DECIMAL
DivisorMáx. 999- 16 bitsMáx. 9.999- 24 bitsMáx. 65.535- *PLC
DividendoMáx. 999- 16 bitsMáx. 9.999- 24 bitsMáx. 65.535- *PLC
31004676 4/2006 233

DIV: División
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno Activo = valor 1 dividido entre valor 2.
Entrada intermedia
0x, 1x Ninguno Activo = resto decimal.Inactivo = resto en fracción.
Valor 1(asiento superior)
3x, 4x INT, UINT
Dividendo: se puede mostrar de forma explícita como un número entero (rango 1 a 9.999)* o almacenarse en dos registros contiguos (visualizados para la mitad de mayor orden e implícitos para la mitad de menor orden). *Máx. 999 - 16 bits; máx. 9.999 - 24 bits; máx. 65.535 - *PLC (consulte la lista de disponibilidad anterior).
Valor 2(asiento intermedio)
3x, 4x INT, UINT
Divisor: se puede mostrar de forma explícita como un número entero (rango 1 a 9.999) o almacenarse en un registro.*Máx. 999 - 16 bits; máx. 9.999 - 24 bits; máx. 65.535 - *PLC (consulte la lista de disponibilidad anterior).
Resultado/resto(asiento inferior)
4x INT, UINT
Primero de los dos registros de salida contiguos: Visualizado: resultado de la división. Implícito: resto (bien sea decimal o fracción, según el estado de la entrada intermedia).
Salida superior
0x Ninguno Activo = división satisfactoria.
Salida intermedia
0x Ninguno Activo = desborde:si el resultado > 9.999*, se devuelve el valor 0.*Máx. 999 - 16 bits; máx. 9.999 - 24 bits; máx. 65.535 - *PLC (consulte la lista de disponibilidad anterior).
Salida inferior
0x Ninguno Activo = valor 2 = 0.
234 31004676 4/2006

DIV: División
Ejemplo
Cociente de la instrucción DIV
El estado de la entrada intermedia indica si el resto se expresará como un número decimal o como una fracción. Por ejemplo, si el valor 1 = 8 y el valor 2 = 3, el resto decimal (con la entrada intermedia activa) será 6666 y el resto en fracción (entrada intermedia inactiva) será 2.
31004676 4/2006 235

DIV: División
236 31004676 4/2006

31004676 4/2006
37
DLOG: Captación automática de datos de medidas para el apoyo de lectura/escritura PCMCIAPresentación
Introducción En este capítulo se describe la instrucción DLOG.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 238
Representación: DLOG 239
Descripción de los parámetros 241
Tratamiento de errores de ejecución 243
237

DLOG: Captación automática de datos de medidas para el apoyo de lectura/escritura PCMIA
Descripción breve
Descripción de la función
El apoyo de lectura/escritura consiste en una ampliación de configuración que se puede poner en marcha utilizando una instrucción DLOG. La instrucción DLOG proporciona ayuda a las aplicaciones para copiar datos a una tarjeta Flash PCMCIA, copiar datos desde una tarjeta Flash PCMCIA, borrar bloques de memoria en una tarjeta Flash PCMCIA y borrar toda una tarjeta Flash PCMCIA. El formato de datos y la frecuencia de su almacenamiento estarán controlados por la aplicación.
Nota: Esta instrucción sólo está disponible para la familia de PLC Compact TSX.
Nota: La instrucción DLOG sólo funcionará con tarjetas Flash linear PCMCIA que utilizan dispositivos de Flash AMD.
238 31004676 4/2006

DLOG: Captación automática de datos de medidas para el apoyo
Representación: DLOG
Símbolo Representación de la instrucción.
DLOG
longitud
campo de datos
bloque decontrol
ENTRADA DE CONTROL ACTIVO
OPERACIÓN CORRECTA
LA OPERACIÓN NO HA FINALIZADOSATISFACTORIAMENTE
FINALIZAR OPERACIÓNDLOG ACTIVA
31004676 4/2006 239
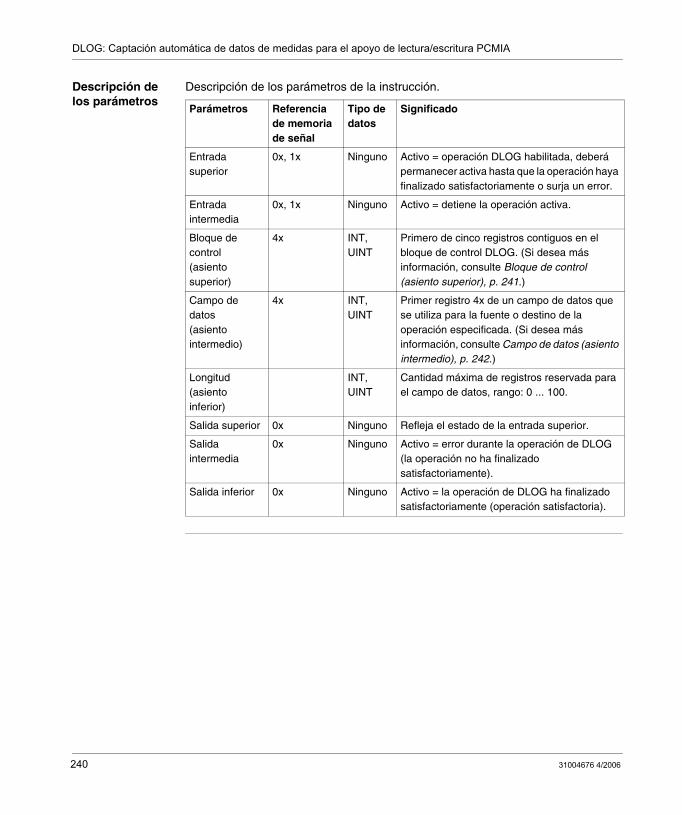
DLOG: Captación automática de datos de medidas para el apoyo de lectura/escritura PCMIA
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno Activo = operación DLOG habilitada, deberá permanecer activa hasta que la operación haya finalizado satisfactoriamente o surja un error.
Entrada intermedia
0x, 1x Ninguno Activo = detiene la operación activa.
Bloque de control(asiento superior)
4x INT, UINT
Primero de cinco registros contiguos en el bloque de control DLOG. (Si desea más información, consulte Bloque de control (asiento superior), p. 241.)
Campo de datos(asiento intermedio)
4x INT, UINT
Primer registro 4x de un campo de datos que se utiliza para la fuente o destino de la operación especificada. (Si desea más información, consulte Campo de datos (asiento intermedio), p. 242.)
Longitud(asiento inferior)
INT, UINT
Cantidad máxima de registros reservada para el campo de datos, rango: 0 ... 100.
Salida superior 0x Ninguno Refleja el estado de la entrada superior.
Salida intermedia
0x Ninguno Activo = error durante la operación de DLOG (la operación no ha finalizado satisfactoriamente).
Salida inferior 0x Ninguno Activo = la operación de DLOG ha finalizado satisfactoriamente (operación satisfactoria).
240 31004676 4/2006

DLOG: Captación automática de datos de medidas para el apoyo
Descripción de los parámetros
Bloque de control (asiento superior)
El registro 4x introducido en el asiento superior es el primero de cinco registros contiguos en el bloque de control DLOG.
Éste define la función del comando DLOG, así como la ventana y el offset de la tarjeta Flash PCMCIA, y devuelve una palabra de estado y un valor de conteo de palabras de datos.
Registro Función Contenido
Visualizado Estado de error Muestra los errores de DLOG en valores HEX.
Primer implícito
Tipo de operación 1 = escribir en tarjeta PCMCIA.2 = leer en tarjeta PCMCIA.3 = borrar un bloque.4 = borrar el contenido de toda la tarjeta.
Segundo implícito
Ventana(descriptor del bloque)
Este registro identifica un bloque concreto (ventana de memoria PCMCIA) situada en la tarjeta PCMCIA (1 bloque = 128 kBytes). El número de bloques depende del tamaño de la memoria de la tarjeta PCMCIA (por ejemplo, 0 ... 31 como máximo para una tarjeta PCMCIA de 4 Meg).
Tercer implícito
Offset(Dirección de byte dentro del bloque)
Rango específico de bytes situados dentro de un bloque determinado en la tarjeta PCMCIA.Rango: 1 ... 128 K bytes.
Cuarto implícito
Cantidad Número de registros que se van a leer o escribir en la tarjeta PCMCIA. Rango: 0 ... 100.
Nota: Las direcciones de la tarjeta Flash PCMCIA son direcciones con base Ventana: Offset. Las ventanas tendrán un tamaño fijo de 128 kBytes (65.535 palabras (valores de 16 bits)). Ninguna operación de lectura o escritura debe sobrepasar los límites de una ventana a la siguiente. Por ello, offset (tercer registro implícito) más longitud (cuarto registro implícito) debe ser siempre menor o igual a 128 kBytes (65.535 palabras).
31004676 4/2006 241
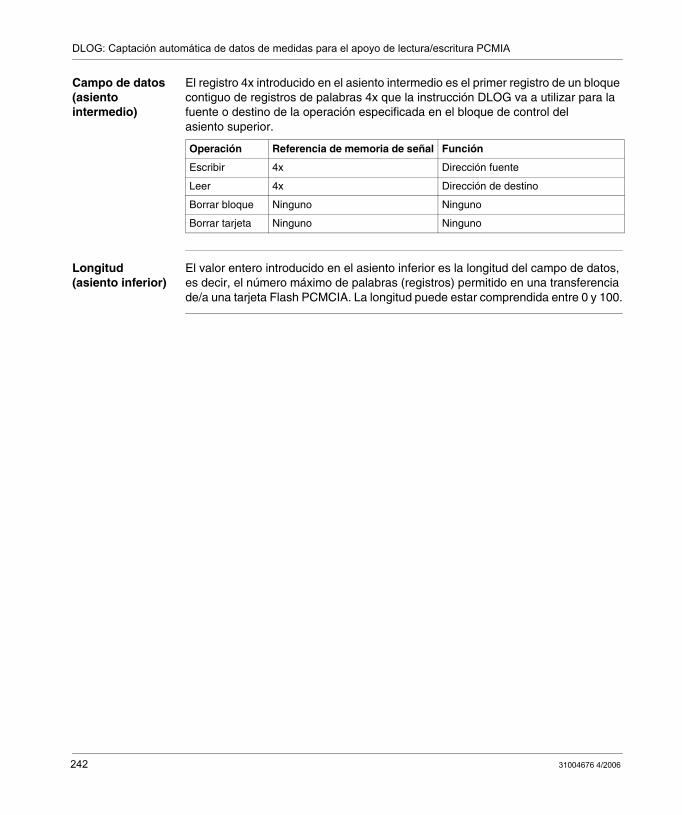
DLOG: Captación automática de datos de medidas para el apoyo de lectura/escritura PCMIA
Campo de datos (asiento intermedio)
El registro 4x introducido en el asiento intermedio es el primer registro de un bloque contiguo de registros de palabras 4x que la instrucción DLOG va a utilizar para la fuente o destino de la operación especificada en el bloque de control del asiento superior.
Longitud (asiento inferior)
El valor entero introducido en el asiento inferior es la longitud del campo de datos, es decir, el número máximo de palabras (registros) permitido en una transferencia de/a una tarjeta Flash PCMCIA. La longitud puede estar comprendida entre 0 y 100.
Operación Referencia de memoria de señal Función
Escribir 4x Dirección fuente
Leer 4x Dirección de destino
Borrar bloque Ninguno Ninguno
Borrar tarjeta Ninguno Ninguno
242 31004676 4/2006

DLOG: Captación automática de datos de medidas para el apoyo
Tratamiento de errores de ejecución
Códigos de error El registro visualizado del bloque de control contiene los siguientes errores de DLOG en código hex.
Código de error en hex Contenido
1 El parámetro de conteo del bloque de control > la longitud del bloque DLOG durante una operación de WRITE (01).
2 La operación de la tarjeta PCMCIA ha fallado durante el inicio (escribir/leer/borrar).
3 La operación de la tarjeta PCMCIA ha fallado durante la ejecución (escribir/leer/borrar).
31004676 4/2006 243

DLOG: Captación automática de datos de medidas para el apoyo de lectura/escritura PCMIA
244 31004676 4/2006

31004676 4/2006
38
DMTH - Matemática de doble precisiónPresentación
Introducción En este capítulo se describen las cuatro operaciones de matemática de doble precisión ejecutadas por la instrucción DMTH. Estas cuatro operaciones son: adición, substracción, multiplicación y división.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve: DMTH - Matemática de doble precisión - Adición, substracción, multiplicación y división
246
Representación: DMTH - Matemática de doble precisión - Adición, substracción, multiplicación y división
247
245

DMTH - Matemática de doble precisión
Descripción breve: DMTH - Matemática de doble precisión - Adición, substracción, multiplicación y división
Descripción de la función
La instrucción de matemática de doble precisión (DMTH) realiza adición, substracción, multiplicación y división de doble precisión (establecida por el asiento inferior). La instrucción DMTH utiliza 2 registros unidos para formar un operando.
Cada instrucción DMTH opera sobre el mismo par de operandos.OP1 = 4x, 4x + 1 (asiento superior)OP2 = 4y, 4y + 1 (asiento intermedio)
Códigos de función
La instrucción DMTH realiza cualquiera de las cuatro posibles operaciones de matemática de doble precisión. Esta operación se realiza llamando a una función. Para llamar a la función deseada introduzca un código de función en el asiento inferior. Los códigos de función van del 1 al 4.
NotasPara números repartidos en varios registros, los 4 dígitos de menor valor se almacenan en el registro de salida más alto.El resultado, el flag y el resto se almacenan en los registros siguientes a OP2.Los registros no utilizados por la función matemática elegida se pueden utilizar con otros fines.La función de substracción utiliza las salidas para indicar el resultado de la comparación entre los operandos OP1 y OP2.
Código Función DMTH Función realizada Registros de resultado
1 Adición de doble precisión Sumar (OP1) + (OP 2) (4y + 3, 4y + 4)
2 Substracción de doble precisión
Substraer (OP1) - (OP 2) (4y + 2, 4y + 3)
3 Multiplicación de doble precisión
Multiplicar (OP1) * (OP 2) (4y + 2, 4y + 3)
(4y + 4, 4y + 5)
4 División de doble precisión Dividir (OP1)\(OP 2) (4y + 2, 4y + 3) cociente
(4y + 4, 4y + 5) resto
246 31004676 4/2006

DMTH - Matemática de doble precisión
Representación: DMTH - Matemática de doble precisión - Adición, substracción, multiplicación y división
Explicación de esta sección
Esta sección describe las operaciones de adición, substracción, multiplicación y división, es decir, las cuatro operaciones que realiza la instrucción DMTH. Cada operación tiene un símbolo, que es una representación gráfica de la instrucción, y una descripción de parámetros, que es una representación de la instrucción en formato de tabla.
Símbolo - Adición
Representación de la instrucción para la operación de adición.
Descripción de parámetros - Adición
Descripción de los parámetros de la instrucción para la operación de adición.
ENTRADA DE CONTROL OPERACIÓN CORRECTA
ERROR
operando 1
operando 2y suma
DMTH
1
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno En estado activo suma los operandos y coloca el resultado en registros designados.
31004676 4/2006 247

DMTH - Matemática de doble precisión
Operando 1(asiento superior)
4x INT, UINT
El primero de dos registros 4xxxx contiguos se introduce en el asiento superior. El segundo registro 4xxxx está implícito. El operando 1 se almacena aquí.Cada registro contiene un valor que puede ir de 0000 a 9.999; para un valor combinado de doble precisión el rango va de 0 a 99.999.999. La mitad de mayor orden del operando 1 se almacena en el registro visualizado, mientras que la de menor orden se almacena en el registro implícito.
Operando 2 y suma(asiento intermedio)
4x INT, UINT
El primero de seis registros 4x contiguos se introduce en el asiento intermedio.Los cinco registros restantes están implícitos:
El registro visualizado y el primer registro implícito almacenan, respectivamente, las mitades de mayor y menor orden del operando 2, para un valor combinado de doble precisión en el rango que va de 0 a 99.999.999.El valor almacenado en el segundo registro implícito indica si existe una condición de desborde (valor 1 = desborde).El tercer y cuarto registros implícitos almacenan, respectivamente, las mitades de mayor y menor orden de la suma de doble precisión.El quinto registro implícito no se utiliza en el cálculo, pero debe existir en la memoria de señal.
Salida superior
0x Ninguno Activo = operación correcta.
Salida intermedia
0x Ninguno Activo = operando fuera de rango o no válido.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
248 31004676 4/2006
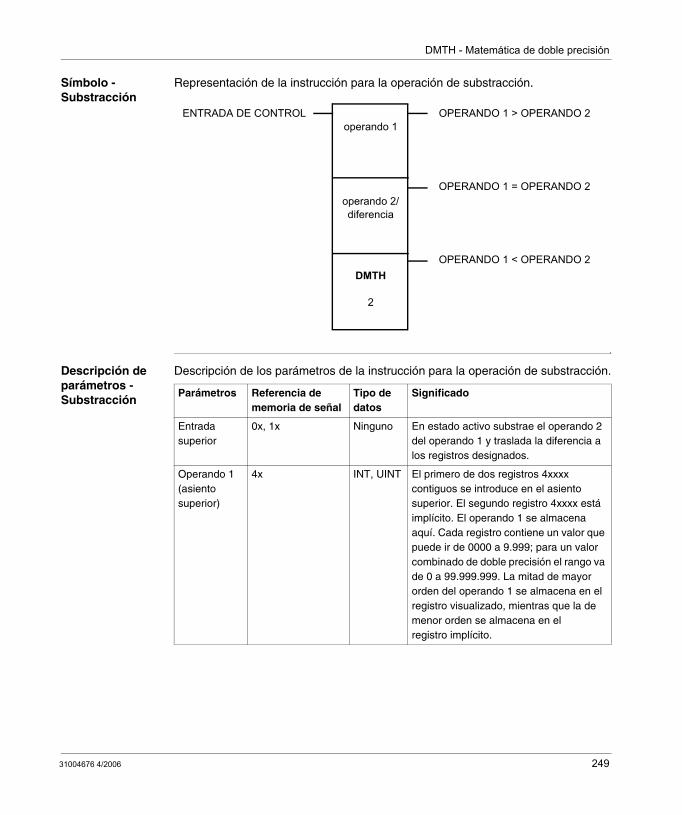
DMTH - Matemática de doble precisión
Símbolo - Substracción
Representación de la instrucción para la operación de substracción.
Descripción de parámetros - Substracción
Descripción de los parámetros de la instrucción para la operación de substracción.
ENTRADA DE CONTROL OPERANDO 1 > OPERANDO 2
OPERANDO 1 = OPERANDO 2
OPERANDO 1 < OPERANDO 2
operando 1
operando 2/diferencia
DMTH
2
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno En estado activo substrae el operando 2 del operando 1 y traslada la diferencia a los registros designados.
Operando 1(asiento superior)
4x INT, UINT El primero de dos registros 4xxxx contiguos se introduce en el asiento superior. El segundo registro 4xxxx está implícito. El operando 1 se almacena aquí. Cada registro contiene un valor que puede ir de 0000 a 9.999; para un valor combinado de doble precisión el rango va de 0 a 99.999.999. La mitad de mayor orden del operando 1 se almacena en el registro visualizado, mientras que la de menor orden se almacena en el registro implícito.
31004676 4/2006 249

DMTH - Matemática de doble precisión
Operando 2/diferencia(asiento intermedio)
4x INT, UINT El primero de seis registros 4xxxx contiguos se introduce en el asiento intermedio.Los cinco registros restantes están implícitos:
El registro visualizado y el primer registro implícito almacenan, respectivamente, las mitades de mayor y menor orden del operando 2, para un valor combinado de doble precisión en el rango que va de 0 a 99.999.999.El valor almacenado en el segundo registro implícito indica si existe una condición de desborde (valor 1 = desborde).Los registros implícitos tercero y cuarto almacenan, respectivamente, las mitades de mayor y menor orden de la suma de doble precisión.El quinto registro implícito no se utiliza en el cálculo, pero debe existir en la memoria de señal.
Salida superior
0x Ninguno Activo = operando 1 > operando 2
Salida intermedia
0x Ninguno Activo = operando 1 = operando 2
Salida inferior 0x Ninguno Activo = operando 1 < operando 2
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
250 31004676 4/2006

DMTH - Matemática de doble precisión
Símbolo - Multiplicación
Representación de la instrucción para la operación de multiplicación.
Descripción de parámetros - Multiplicación
Descripción de los parámetros de la instrucción para la operación de multiplicación.
ENTRADA DE CONTROL ACTIVO = OPERACIÓN CORRECTA
ERROR
operando 1
operando 2/producto
DMTH
3
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno Activo = el operando 1 se multiplica por el operando 2 y el producto se traslada a los registros designados.
Operando 1(asiento superior)
4x INT, UINT
El primero de dos registros 4xxxx contiguos se introduce en el asiento superior. El segundo registro 4xxxx está implícito. El operando 1 se almacena aquí. El segundo registro 4x está implícito. Cada registro contiene un valor que puede ir de 0000 a 9.999; para un valor combinado de doble precisión el rango va de 0 a 99.999.999. La mitad de mayor orden del operando 1 se almacena en el registro visualizado, mientras que la de menor orden se almacena en el registro implícito.
31004676 4/2006 251

DMTH - Matemática de doble precisión
Símbolo - División
Representación de la instrucción para la operación de división.
Operando 2/producto(asiento intermedio)
4x INT, UINT
El primero de seis registros 4xxxx contiguos se introduce en el asiento intermedio.Los cinco registros restantes están implícitos:
El registro visualizado y el primer registro implícito almacenan, respectivamente, las mitades de mayor y menor orden del operando 2, para un valor combinado de doble precisión en el rango que va de 0 a 99.999.999.Los cuatro últimos registros implícitos almacenan el producto de doble precisión en el rango que va de 0 a 9.999.999.999.999.999.
Salida superior
0x Ninguno Activo = operación correcta.
Salida intermedia
0x Ninguno Activo = operando fuera de rango.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
ENTRADA DE CONTROL
RESTO
OPERACIÓN CORRECTA
ERROR
INTENTO DE DIVISIÓN ENTRE 0
operando 1
operando 2cociente
resto
DMTH
4
252 31004676 4/2006

DMTH - Matemática de doble precisión
Descripción de parámetros - División
Descripción de los parámetros de la instrucción para la operación de división.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior
0x, 1x Ninguno Activo = el operando 1 se divide entre el operando 2 y el resultado se traslada a los registros designados.
Entrada intermedia
0x, 1x Ninguno Activo = resto decimal.Inactivo = resto en fracción.
Operando 1(asiento superior)
4x INT, UINT
El primero de dos registros 4xxxx contiguos se introduce en el asiento superior. El segundo registro 4xxxx está implícito. El operando 1 se almacena aquí. El segundo registro 4x está implícito. Cada registro contiene un valor que puede ir de 0000 a 9.999; para un valor combinado de doble precisión el rango va de 0 a 99.999.999. La mitad de mayor orden del operando 1 se almacena en el registro visualizado, mientras que la de menor orden se almacena en el registro implícito.
31004676 4/2006 253

DMTH - Matemática de doble precisión
Operando 2cocienteresto(asiento intermedio)
4x INT, UINT
El primero de seis registros 4x contiguos se introduce en el asiento intermedio. Los cinco registros restantes están implícitos:
El registro visualizado y el primer registro implícito almacenan, respectivamente, las mitades de mayor y menor orden del operando 2, para un valor combinado de doble precisión en el rango que va de 0 a 99.999.999.
Nota: Dado que la división entre 0 no es válida, el valor 0 provocará un error; una rutina de tratamiento de errores establecerá en 0000 los registros restantes del asiento intermedio y activará la salida inferior.
Los registros implícitos segundo y tercero almacenan un cociente de ocho dígitos.Los registros implícitos cuarto y quinto almacenan el resto. Si el resto se expresa como una fracción, tendrá una longitud de ocho dígitos y se usarán ambos registros, mientras que si se expresa como un decimal, tendrá una longitud de cuatro dígitos y sólo se utilizará el cuarto registro implícito.
Salida superior
0x Ninguno Activo = operación correcta.
Salida intermedia
0x Ninguno Activo = operando fuera de rango.
Salida inferior
0x Ninguno Activo = el operando 2 es 0.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
254 31004676 4/2006

31004676 4/2006
39
DRUM: Secuenciador de tamborPresentación
Introducción En este capítulo se describe la instrucción DRUM.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 256
Representación: DRUM 257
Descripción de los parámetros 259
255

DRUM: Secuenciador de tambor
Descripción breve
Descripción de la función
La instrucción DRUM se realiza en una tabla de registros 4x que contiene datos que representan cada paso de una secuencia. El número de registros asociados a esta tabla de datos dependerá del número de pasos que sean necesarios en la secuencia. Puede pre- asignar registros para almacenar datos de cada paso en la secuencia, permitiendo así añadir en el futuro pasos del secuenciador sin tener que modificar la lógica de aplicación.
DRUM incorpora una máscara de salida que le permitirá enmascarar de forma selectiva bits en los datos de registro antes de escribirlos en bobinas. Esto es especialmente útil cuando todas las salidas físicas del secuenciador no son contiguas en el módulo de salida. Los bits enmascarados no se verán alterados por la instrucción DRUM y la lógica los utilizará sin tener en cuenta el secuenciador.
Nota: Esta instrucción sólo estará disponible si ha expandido e instalado las instrucciones cargables DX; encontrará más información en el capítulo p. 107."
256 31004676 4/2006

DRUM: Secuenciador de tambor
Representación: DRUM
Símbolo Representación de la instrucción.
*Disponible en los siguientes PLC:E685/785L785Serie Quantum
DRUM
longitud
tabla de datos de pasos
pointer de paso
ENTRADA DE CONTROL ACTIVO
ERRORRESTABLECER
ÚLTIMO PASOPASO SIGUIENTE
Número de paso actual
Longitud:Máx. 255- PLC de 16 bitsMáx. 999- PLC de 24 bitsMáx. 65.535- *PLC
31004676 4/2006 257
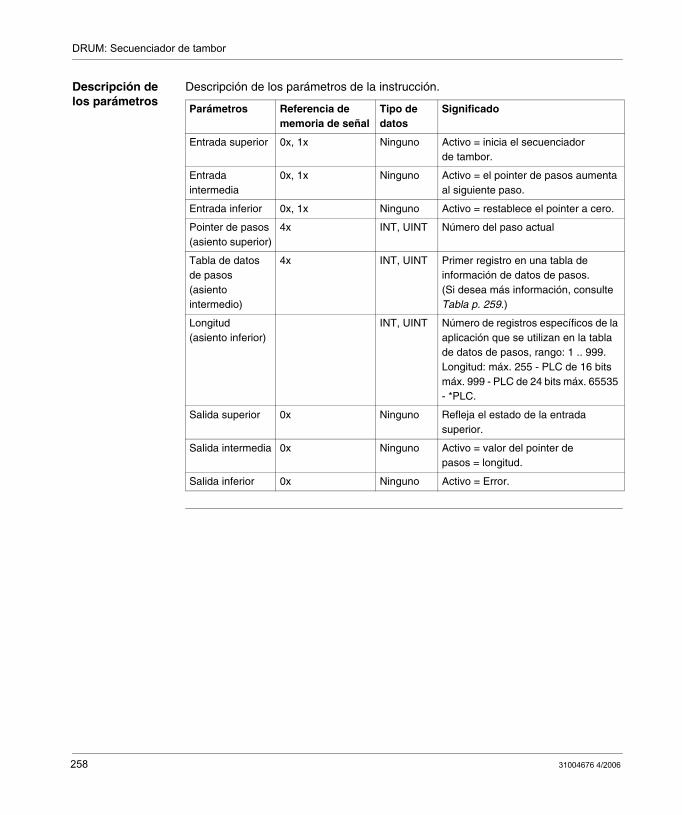
DRUM: Secuenciador de tambor
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior 0x, 1x Ninguno Activo = inicia el secuenciador de tambor.
Entrada intermedia
0x, 1x Ninguno Activo = el pointer de pasos aumenta al siguiente paso.
Entrada inferior 0x, 1x Ninguno Activo = restablece el pointer a cero.
Pointer de pasos(asiento superior)
4x INT, UINT Número del paso actual
Tabla de datos de pasos(asiento intermedio)
4x INT, UINT Primer registro en una tabla de información de datos de pasos.(Si desea más información, consulte Tabla p. 259.)
Longitud(asiento inferior)
INT, UINT Número de registros específicos de la aplicación que se utilizan en la tabla de datos de pasos, rango: 1 .. 999.Longitud: máx. 255 - PLC de 16 bits máx. 999 - PLC de 24 bits máx. 65535 - *PLC.
Salida superior 0x Ninguno Refleja el estado de la entrada superior.
Salida intermedia 0x Ninguno Activo = valor del pointer de pasos = longitud.
Salida inferior 0x Ninguno Activo = Error.
258 31004676 4/2006

DRUM: Secuenciador de tambor
Descripción de los parámetros
Pointer de pasos (asiento superior)
El registro 4x introducido en el asiento superior almacena el número de paso actual. La instrucción DRUM hace referencia al valor de este registro cada vez que éste se ejecuta. Si el asiento intermedio del bloque está activo, los contenidos del registro del asiento superior se incrementarán hasta el siguiente paso de la secuencia antes de que se ejecute el bloque.
Tabla de datos de pasos (asiento intermedio)
El registro 4x introducido en el nodo intermedio es el primer registro de una tabla de información de datos de pasos.
Los seis primeros registros en la tabla de datos de pasos mantienen datos
constantes y variables necesarios para ejecutar el bloque.
Registro Nombre Contenido
Visualizado Datos de salida enmascarados
DRUM los carga cada vez que se ejecuta el bloque; está formado por los contenidos del registro de datos de pasos actual enmascarado con el registro de máscara de salida.
Primer implícito
Datos de paso actuales
Cargados por DRUM cada vez que se ejecuta el bloque; contiene datos del pointer de pasos; hace que la lógica del bloque calcule automáticamente los offsets de los registros al acceder a los datos de pasos en la tabla de datos de pasos.
Segundo implícito
Máscara de salida
Cargada por el usuario antes de utilizar el bloque, DRUM no alterará los contenidos de la máscara de salida durante la ejecución lógica; contiene un máscara que se aplicará a los datos para cada parada del secuenciador.
Tercer implícito
Número de identificación de máquina
Identifica los bloques DRUM/ICMP que pertenecen a la configuración específica de una máquina; rango de valores: 0 ... 9.999 (0 = bloque no configurado); todos los bloques que pertenecen a la misma configuración de máquina deben tener el mismo número de ID de máquina.
Cuarto implícito
Número de identificación de perfil
Identifica datos de perfil cargados actualmente en el secuenciador; rango de valor: 0... 9.999 (0 = bloque no configurado); todos los bloques con el mismo número de identificación de máquina deben tener el mismo número de identificación de perfil.
Quinto implícito
Pasos utilizados
Cargado por el usuario antes de utilizar el bloque, DRUM no altera el contenido de los pasos usados durante una resolución lógica; contiene entre 1 y 999 para las CPU de 24 bits, especifica el número actual de pasos que se deben resolver; el número debe ser mayor o menor que la longitud de la tabla en el asiento inferior.
31004676 4/2006 259

DRUM: Secuenciador de tambor
Los registros restantes contienen datos para cada paso de la secuencia.
Longitud (asiento inferior)
El valor entero introducido en el asiento inferior especifica la longitud, es decir, el número de registros específicos de la aplicación utilizados en la tabla de datos de pasos. La longitud puede tener un rango de 1 a 999 en una CPU de 24 bits.
El número total de registros necesarios para una tabla de datos de pasos es la longitud +6. La longitud debe ser igual o mayor que el valor indicado en el registro de pasos utilizados del asiento intermedio.
260 31004676 4/2006
31004676 4/2006
40
DV16: División de 16 bitsPresentación
Introducción En este capítulo se describe la instrucción DV16.
Contenido: Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción breve 262
Representación: DV16 - División de 16-bits 263
Ejemplo 265
261

DV16: División de 16 bits
Descripción breve
Descripción de la función
La instrucción DV16 ejecuta una división con o sin signo de los valores de 16 bits de los asientos superior e intermedio (valor 1/valor 2) y, a continuación, sitúa el cociente y el resto en dos registros de salida 4x contiguos en el asiento inferior.
262 31004676 4/2006
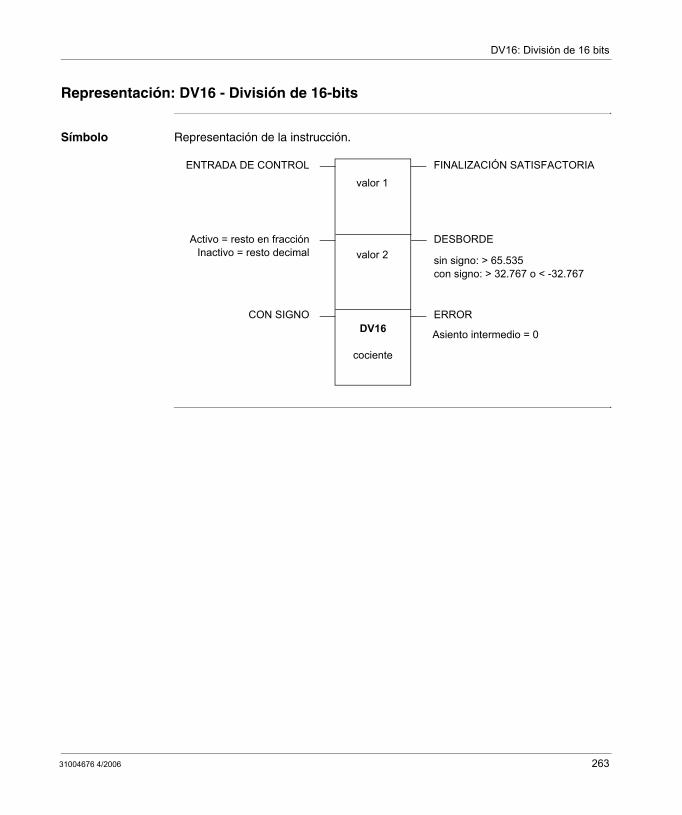
DV16: División de 16 bits
Representación: DV16 - División de 16-bits
Símbolo Representación de la instrucción.
DV16
cociente
valor 2
valor 1
ENTRADA DE CONTROL FINALIZACIÓN SATISFACTORIA
ERRORCON SIGNO
DESBORDEActivo = resto en fracciónInactivo = resto decimal
sin signo: > 65.535con signo: > 32.767 o < -32.767
Asiento intermedio = 0
31004676 4/2006 263

DV16: División de 16 bits
Descripción de los parámetros
Descripción de los parámetros de la instrucción.
Parámetros Referencia de memoria de señal
Tipo de datos
Significado
Entrada superior 0x, 1x Ninguno Activo = habilita valor 1 y valor 2.
Entrada intermedia
0x, 1x Ninguno Inactivo = resto decimal.Activo = resto en fracción.
Entrada inferior 0x, 1x Ninguno Activo = operación con signo.Inactivo = operación sin signo.
Valor 1(asiento superior)
3x, 4x INT, UINT
Dividendo: se puede mostrar de forma explícita como número entero (rango 1 a 65.535) o almacenarse en dos registros contiguos (visualizados para la mitad de mayor orden, implícitos para la mitad de menor orden).
Valor 2(asiento intermedio)
3x, 4x INT, UINT
Divisor: se puede mostrar de forma explícita como número entero (rango 1 a 65.535, introduzca, por ejemplo, el número 65.535) o guardado en un registro.
Cociente(asiento inferior)
4x INT, UINT
Primero de los dos registros de salida contiguos: Visualizado: resultado de la división.Implícito: resto (bien sea decimal o fracción, según el estado del asiento intermedio).
Salida superior 0x Ninguno Activo = la división se ha completado satisfactoriamente.
Salida intermedia 0x Ninguno Activo = desborde:Cociente > 65.535 en una operación sin signo.-32.768 > cociente > 32.767 en una operación con signo.
Salida inferior 0x Ninguno Activo = valor 2 = 0.
264 31004676 4/2006

DV16: División de 16 bits
Ejemplo
Cociente de la instrucción DV16
El estado de la entrada intermedia indica si el resto se expresará como un número decimal o como una fracción. Por ejemplo, si el valor 1 = 8 y el valor 2 = 3, el resto decimal (con la entrada intermedia inactiva) será 6.666 y el resto como fracción (entrada intermedia activa) será 2.
31004676 4/2006 265

DV16: División de 16 bits
266 31004676 4/2006

Glosario
Advertencia Si durante el procesamiento de un FFB o de un paso se detecta un estado crítico (p. ej., valores de entrada críticos o rebasamiento del límite de tiempo), se generará una advertencia que se puede ver con el comando de menú Online → Indicación de eventos... . En el caso de los FFB, la salida ENO permanece en "1".
Ajustes de la transmisión de datos
Ajustes que establecen la forma en que se va a transmitir la información desde el equipo de programación al PLC.
ANL_IN ANL_IN representa el tipo de datos "entrada analógica" y se utiliza para el procesamiento de valores analógicos. Las referencias 3x del módulo de entrada analógica configurado definidas en la lista de componentes de E/S se asignan automáticamente al tipo de datos y, por eso, sólo pueden estar ocupadas por Unlocated variables.
ANL_OUT ANL_OUT representa el tipo de datos "salida analógica" y se utiliza para el procesamiento de valores analógicos. Las referencias 4x del módulo de salida analógica configurado definidas en la lista de componentes E/S se asignan automáticamente al tipo de datos y, por eso, sólo pueden estar ocupadas por Unlocated variables.
ANY En la presente versión, "ANY" incluye los tipos de datos elementales BOOL, BYTE, DINT, INT, REAL, UDINT, UINT, TIME y WORD y los tipos de datos derivados de ellos.
ANY_BIT En la presente versión, "ANY_BIT" incluye los tipos de datos BOOL, BYTE y WORD.
A
31004676 4/2006 xxxi

Glosario
ANY_ELEM En la presente versión, "ANY_ELEM" incluye los tipos de datos elementales BOOL, BYTE, DINT, INT, REAL, UDINT, UINT, TIME y WORD.
ANY_INT En la presente versión, "ANY_INT" incluye los tipos de datos DINT, INT, UDINT y UINT.
ANY_NUM En la presente versión, "ANY_NUM" incluye los tipos de datos DINT, INT, REAL, UDINT y UINT.
ANY_REAL En la presente versión, "ANY_REAL" incluye el tipo de datos REAL.
Archivo de código fuente (EFB Concept)
El archivo de código fuente es un archivo de fuente C++ convencional. Después de ejecutar el comando de menú Biblioteca → Generar ficheros, este archivo contiene un cuadro de códigos de EFB en el que deberá introducir un código específico para el EFB seleccionado. Para ello, ejecute el comando de menú Objetos → Fuente.
Archivo de datos Backup (EFB Concept)
El archivo de copia de seguridad es una copia del último archivo de origen. El nombre de este archivo de copia de seguridad es "backup??.c" (se asume que no tiene más de 100 copias del archivo de código fuente). El primer archivo de copia de seguridad se llama "backup00.c". Si ha realizado modificaciones en el archivo de definición que no provocan ningún cambio en la interfase en caso de EFB, podrá ahorrarse la creación del archivo de copia de seguridad editando los archivos de origen (Objetos → Fuente). Si crea un archivo de copia de seguridad, puede darle el nombre del archivo de origen.
Archivo de definición (EFB Concept)
El archivo de definición contiene información descriptiva general sobre el EFB seleccionado y sus parámetros formales.
Archivo de modelo (EFB Concept)
El archivo de modelo es un archivo ASCII con información de diseño para el editor de FBD Concept y los parámetros para la generación de códigos.
Archivo de protocolo (EFB Concept)
El archivo de protocolo contiene todos los prototipos de las funciones asignadas. A continuación se indica, si la hay, una definición de tipo de la estructura de estado interno.
Argumento Significa lo mismo que parámetros actuales.
xxxii 31004676 4/2006
Glosario
Atrium El controlador basado en PC se encuentra en una tarjeta AT estándar y se puede utilizar dentro de un equipo host en un slot de bus ISA. El módulo dispone de una placa base (necesita el controlador SA85) con dos slots para tarjetas PC104. Una de estas tarjetas PC104 se utiliza como CPU y la otra, como controlador INTERBUS.
Base de datos del proyecto
Base de datos del equipo de programación que contiene la información de planificación para un proyecto.
Biblioteca Colección de objetos de software previstos para reutilizarlos al programar nuevos proyectos, o incluso para formar nuevas bibliotecas. Como ejemplos se pueden citar las bibliotecas de los tipos de bloques de función elementales.Las bibliotecas EFB se pueden subdividir en grupos.
Bits de entrada (referencias 1x)
El estado 1/0 de los bits de entrada se controla mediante los datos de proceso que llegan a la CPU desde un dispositivo de entrada.
Bits de estado Existe un bit de estado para cada participante con entrada global o entrada/salida específica de datos Peer Cop. Si se ha transmitido con éxito un grupo definido de datos dentro del timeout establecido, el bit de estado correspondiente pasará a 1. En caso contrario, este bit pasará a 0 y se borrarán todos los datos pertenecientes a este grupo (a 0).
Bloque de función (elemento) (FB)
Un bloque de función es una unidad organizativa del programa que calcula, de acuerdo con la funcionalidad definida en la descripción del tipo de bloque de función, los valores para sus salidas y variable o variables internas cuando se ejecuta como elemento determinado. Todos los valores de las salidas y variables internas de un determinado elemento del bloque de función se conservan de una llamada del bloque de función a la siguiente. Aunque se ejecute varias veces un mismo elemento del bloque de función con los mismos argumentos (valores de parámetros de entrada), no se obtendrán necesariamente los mismos valores de salida.
B
Nota: La x que aparece detrás de la primera cifra del tipo de referencia representa un lugar de almacenamiento de cinco posiciones en la memoria de datos de la aplicación; por ejemplo, la referencia 100201 significa un bit de entrada en la dirección 201 de la memoria de señal.
31004676 4/2006 xxxiii

Glosario
Cada elemento del bloque de función se representa gráficamente mediante un símbolo de bloque rectangular. El nombre del tipo de bloque de función está dentro del rectángulo, centrado en la parte superior. El nombre del elemento del bloque de función también está arriba, pero fuera del rectángulo. Se genera automáticamente al crear una instancia, pero, en caso necesario, el usuario puede modificarlo. Las entradas se representan en la parte izquierda del bloque; las salidas, en la derecha. Los nombres de los parámetros formales de entrada/salida aparecen dentro del rectángulo, en el lugar correspondiente.La descripción anterior de la representación gráfica también es aplicable en general a las llamadas de funciones y a las llamadas de DFB. En las correspondientes definiciones se indican las diferencias.
Bobina Una bobina es un elemento LD que transmite, sin modificarlo, el estado de la conexión horizontal de su izquierda a la conexión horizontal de su derecha. Al hacerlo, el estado se guarda en la variable/dirección directa correspondiente.
BOOL BOOL indica el tipo de datos "booleano". La longitud de los elementos de datos es de 1 bit (en la memoria se guarda en 1 byte). El rango de valores para las variables de este tipo de datos es 0 (FALSE) y 1 (TRUE).
BYTE BYTE indica el tipo de datos "secuencia de bits 8". La entrada se efectúa en forma de literal de base 2, literal de base 8 o literal de base 16. La longitud de los elementos de datos es de 8 bits. A este tipo de datos no se le puede asignar un Margen de valores numérico.
Ciclo del programa
Un ciclo del programa se compone de la carga de las entradas, el procesamiento de la lógica del programa y la entrega de las salidas.
Conexión Conexión de control o de flujo de datos entre objetos gráficos (p. ej., pasos en el editor de SFC o bloques de función en el editor de FBD) dentro de una sección representada gráficamente como una línea.
Conexión local (Local Link)
La conexión de red local es la red que conecta al participante local con otros participantes, ya sea directamente o mediante amplificador de bus.
Conexiones binarias
Conexiones entre salidas y entradas de FFB del tipo de datos BOOL.
Constantes Las constantes son Unlocated variables a las que se ha asignado un valor que la lógica del programa no puede modificar (protegido contra escritura).
C
xxxiv 31004676 4/2006

Glosario
Contacto Un contacto es un elemento LD que transmite un estado a la conexión horizontal de su derecha. Este estado se obtiene de la operación booleana AND del estado de la conexión horizontal de la izquierda con el estado de la variable/dirección directa correspondiente. Un contacto no modifica el valor de la variable/dirección directa correspondiente.
Contador de funciones
El contador de funciones sirve para identificar inequívocamente una función en un programa o DFB. El contador de funciones no se puede editar y se asigna automáti-camente. El contador de funciones tiene siempre la estructura: .n.m
n = número de la sección (número correlativo)m = número del objeto FFB dentro de la sección (número correlativo)
Creación de instancias
Creación de un elemento.
DDE (Dynamic Data Exchange, Intercambio de datos dinámico)
La interfase DDE permite el intercambio de datos dinámico entre dos programas que se ejecuten en Windows. El usuario puede utilizar la interfase DDE en el monitor ampliado para ejecutar sus propias aplicaciones de visualización. Mediante esta interfase, el usuario (el cliente DDE) no sólo lee datos del monitor ampliado (servidor DDE), sino que también puede escribir datos en el PLC a través del servidor. De esta forma, el usuario puede modificar los datos directamente en el PLC mientras vigila y analiza los resultados. Si utiliza esta interfase, el usuario puede crear e integrar en el sistema sus propias "Graphic Tool", "Face Plate" o "Tuning Tool". Estas herramientas se pueden escribir en cualquier lenguaje que DDE pueda interpretar, p. ej., Visual Basic o Visual C++. Las herramientas se ejecutan cuando el usuario pulsa uno de los botones del cuadro de diálogo de monitor ampliado Concept-Graphic-Tool: Mediante la conexión DDE entre Concept y Concept Graphic Tool se pueden representar las señales de una preparación como cronograma.
Declaración Mecanismo para establecer la definición de un elemento de lenguaje. Normalmente, una declaración incluye la conexión de un identificador con un elemento de lenguaje y la asignación de atributos como tipos de datos y algoritmos.
D
31004676 4/2006 xxxv

Glosario
Derived Function Block (DFB) (bloque de función derivado)
Un bloque de función derivado representa la llamada de un tipo de bloque de función derivado. Encontrará más detalles acerca de la forma gráfica de la llamada en la definición de "bloque de función (elemento)". A diferencia de las llamadas de los tipos EFB, las llamadas de los tipos DFB se identifican mediante líneas verticales dobles en la parte derecha e izquierda del símbolo de bloque rectangular.El cuerpo de un tipo de bloque de función derivado se diseña en el lenguaje FBD, pero sólo en la versión actual del sistema de programación. Actualmente todavía no se pueden utilizar otros lenguajes IEC para la definición de tipos DFB, y las funciones derivadas tampoco se pueden definir en la versión actual.Se distingue entre DFB locales y globales.
DFB globales Los DFB globales están disponibles en todos los proyectos de Concept y se encuentran en el directorio DFB, justo debajo del directorio Concept.
DFB locales Los DFB locales sólo están disponibles en un único proyecto de Concept y se guardan en el directorio DFB bajo el directorio del proyecto.
DINT DINT representa el tipo de datos "número entero sin signo (unsigned integer)". La entrada se efectúa en forma de literal entero, literal de base 2, literal de base 8 o literal de base 16. La longitud del elemento de datos es de 32 bits. El rango de valores para las variables de este tipo de datos va desde -2 exp (31) hasta 2 exp (31) -1.
Dirección de participante
La dirección de participante sirve para identificar sin posibilidad de confusión a un participante de red en la ruta de acceso. La dirección se configura directamente en el participante, p. ej., mediante un conmutador rotativo en la parte posterior del módulo.
Direcciones Las direcciones (directas) son zonas de memoria en el PLC. Se encuentran en la memoria de señal y pueden estar asignadas a módulos de entrada/salida.La visualización/entrada de direcciones directas puede realizarse en los siguientes formatos:
Formato estándar (400001)Formato de separador (4:00001)Formato compacto (4:1)Formato IEC (QW1)
Dummy Archivo vacío compuesto por un encabezado de texto con información general sobre el archivo, como p. ej., autor, fecha de creación, denominación del EFB, etc. El usuario debe completarlo por medio de otras entradas.
xxxvi 31004676 4/2006

Glosario
Elemento de lenguaje
Cualquier elemento básico en uno de los lenguajes de programación IEC, p. ej., un paso en SFC, un elemento de bloque de función en FBD o el valor inicial de una variable.
EN/ENO (Habilitación/Indicación de error)
Si el valor de EN es "0", cuando se ejecute el FFB no se ejecutarán los algoritmos definidos mediante el FFB, y todas las salidas conservarán su valor anterior. En este caso, el valor de ENO se ajustará automáticamente a "0". Si el valor de EN es "1", cuando se ejecute el FFB se ejecutarán los algoritmos definidos mediante el FFB. Una vez que se hayan ejecutado estos algoritmos sin errores, el valor de ENO se ajustará automáticamente a "1". Si se produce un error durante la ejecución de estos algoritmos, ENO pasará a "0" automáticamente. El comportamiento de salida de los FFB no depende de si los FFB se han ejecutado sin EN/ENO o con EN=1. Si está activada la visualización de EN/ENO, habrá que conectar obligatoriamente la entrada EN. De no ser así, no se ejecutará el FFB. La configuración de EN y ENO se activa y desactiva en el cuadro de diálogo de las propiedades de los bloques. Este cuadro de diálogo se abre con los comandos de menú Objetos → Propiedades... o haciendo doble clic en el FFB.
Equipo de programación
Hardware y software que permiten programar, configurar, probar, poner en marcha y buscar errores tanto en las aplicaciones de PLC como en las aplicaciones de sistema descentralizadas para hacer posible la documentación y el archivado de la fuente. En determinadas circunstancias, el equipo de programación se puede utilizar también para la visualización de procesos.
Error Si durante el procesamiento de un FFB o de un paso se detecta un error (p. ej., valores de entrada no permitidos o un error de tiempos), se generará un mensaje de error que se puede ver con el comando de menú Online → Indicación de eventos.... . En el caso de los FFB, la salida ENO se ajustará a "0".
Error de ejecución
Error que se produce durante el procesamiento del programa en el PLC con objetos SFC (p. ej., pasos) o en FFBs. Estos errores pueden ser, por ejemplo, desbordes del rango de valores en cifras o errores de tiempo en pasos.
E
31004676 4/2006 xxxvii

Glosario
Estación DCP de E/S
Con un procesador de control distribuido (D908) puede instalar una red remota con un PLC primario. Si se utiliza un D908 con un PLC remoto, el PLC primario considerará al PLC remoto como una estación de E/S remota. El D908 y el PLC remoto se comunican a través de un bus de sistema, lo que proporciona un alto rendimiento con una mínima repercusión en el tiempo de ciclo. El intercambio de datos entre el D908 y el PLC primario se efectúa a 1,5 megabits por segundo a través del bus de E/S remotas. Un PLC de rango superior puede trabajar hasta con 31 procesadores D908 (direcciones 2-32).
Evaluación Proceso por el cual se averigua el valor de una función o de las salidas de un bloque de función durante la ejecución del programa.
Expresión Las expresiones se componen de operadores y operandos.
FFB (funciones/bloques de función)
Término colectivo para EFB (funciones/bloques de función elementales) y DFB (bloques de función derivados).
Filtro FIR (Finite Impulse Response Filter) Filtro con respuesta de impulsos finita.
Filtro IIR (Infinite Impulse Response Filter) Filtro con respuesta de impulsos infinita
Formato compacto (4:1)
La primera cifra (la referencia) se separa de la siguiente dirección mediante dos puntos (:) sin poner en la dirección los ceros a la izquierda.
Formato de separador (4:00001)
La primera cifra (la referencia) se separa mediante dos puntos (:) de las siguientes cinco posiciones de la dirección.
Formato estándar (400001)
Justo detrás de la primera cifra (la referencia) está la dirección de cinco posiciones.
Formato IEC (QW1)
En la primera posición de la dirección hay un identificador conforme a IEC, seguido de la dirección de cinco posiciones:
%0x12345 = %Q12345%1x12345 = %I12345%3x12345 = %IW12345%4x12345 = %QW12345
F
xxxviii 31004676 4/2006

Glosario
Función (FUNC) Unidad organizativa del programa que proporciona exactamente un elemento de datos en la ejecución. Una función no tiene información interna de estado. Si se ejecuta varias veces la misma función con los mismos valores en los parámetros de entrada, se obtienen siempre los mismos valores de salida.Encontrará más detalles acerca de la forma gráfica de las llamadas de funciones en la definición de "bloque de función (elemento)". A diferencia de las llamadas a bloques de función, las llamadas a funciones sólo tienen una única salida sin nombre, ya que éste coincide con el nombre de la función. En FBD, cada llamada se identifica mediante un número inequívoco que le asigna el bloque gráfico; este número se genera de forma automática y no se puede modificar.
Funciones/bloques de función elementales (EFB)
Denominación de las funciones o los bloques de función cuyas definiciones de tipos no han sido formuladas en uno de los lenguajes IEC; es decir, el cuerpo de las definiciones no se puede modificar con el editor DFB (DFB Concept), por ejemplo. Los tipos de EFB se programan en "C" y están disponibles mediante bibliotecas en la forma previa a la compilación.
Grupos (EFB) Algunas bibliotecas de EFB (p. ej., la biblioteca de IEC) están subdivididas en grupos. Esto facilita la búsqueda de FFB, especialmente en bibliotecas amplias.
Horizontal Horizontal significa que la página del texto impreso es más ancha que alta.
G
H
31004676 4/2006 xxxix

Glosario
IEC 61131-3 Norma internacional: Autómatas programables – Parte 3: Lenguajes de programación.
Instrucción (IL) Las instrucciones son los "comandos" del lenguaje de programación IL. Cada instrucción comienza en una línea nueva y va seguida de un operador o modificador y, si fuera necesario para la operación en cuestión, de uno o más operandos. Si se utilizan varios operandos, éstos se separarán con comas. Antes de la instrucción puede haber una marca, que irá seguida de dos puntos (:). Si hubiera un comentario, deberá ser el último elemento de la línea.
Instrucción (LL984)
Al programar los controles eléctricos, el usuario deberá implementar instrucciones codificadas operacionalmente en forma de objetos de imagen que están divididos en forma de contactos reconocibles. A nivel de usuario, los objetos de programa proyectados se convierten durante el proceso de carga en códigos operacionales utilizables por el equipo. Estos códigos OP se descodifican en la CPU y las funciones de firmware del controlador los procesan de forma que se puede implementar el control deseado.
Instrucción (ST) Las instrucciones son los "comandos" del lenguaje de programación ST. Cada una de ellas debe finalizar con punto y coma (;). En una línea puede haber varias instrucciones (separadas por punto y coma).
INT INT representa el tipo de datos "número entero (integer)". La entrada se efectúa en forma de literal entero, literal de base 2, literal de base 8 o literal de base 16. La longitud del elemento de datos es de 16 bits. El rango de valores para las variables de este tipo de datos va desde -2 exp (15) hasta 2 exp (15) -1.
INTERBUS (PCP) Para utilizar el canal INTERBUS PCP y el pretratamiento de datos de proceso INTERBUS (PDV) se ha introducido en el configurador de Concept el nuevo tipo de estación de E/S INTERBUS (PCP). A este tipo de estación de E/S se le ha asignado de forma fija el módulo de conexión INTERBUS 180-CRP-660-01.El 180-CRP-660-01 sólo se diferencia del 180-CRP-660-00 en que el rango de E/S en la memoria de señal del controlador es considerablemente mayor.
I
xl 31004676 4/2006

Glosario
Ladder Diagram (LD)
Ladder Diagram es un lenguaje de programación gráfico que cumple la norma IEC1131 y se orienta ópticamente a los "circuitos de corriente" de un esquema de contactos de relés.
Ladder Logic 984 (LL)
En los términos Ladder Logic y Ladder Diagram, la palabra Ladder (contacto) se refiere a la ejecución. A diferencia del esquema de conexiones, en electricidad se utiliza el esquema de contactos para dibujar un circuito eléctrico (con símbolos eléctricos) que representa el desarrollo de los eventos, y no los cables que conectan los elementos entre sí. Una interfase de usuario convencional para controlar las acciones de los dispositivos de automatización admite una interfase de esquema de contactos para que los técnicos electricistas no tengan que aprender ningún lenguaje de programación con el que no estén familiarizados para implementar un programa de control.La estructura del esquema de contactos real permite conectar los elementos eléctricos de tal forma que se genere una salida de control que dependa de un flujo de corriente lógico a través de los objetos eléctricos utilizados, que representan la condición antes exigida de un dispositivo eléctrico físico.De forma sencilla, la interfase de usuario es una pantalla de vídeo generada por la aplicación de programación del PLC que configura un reticulado vertical y horizontal en el que se organizan los objetos de programación. El esquema recibe corriente por la parte izquierda del reticulado y, al unir los objetos que están activos, la corriente fluye de izquierda a derecha.
Lenguaje de bloque de función (FBD)
Una o varias secciones que contienen representaciones gráficas de redes de funciones, bloques de función y conexiones.
Lenguaje de ejecución (SFC)
Los elementos de lenguaje SFC permiten subdividir una unidad organizativa de un programa de PLC en un número de pasos y transiciones vinculados entre sí mediante conexiones direccionales. A cada paso le corresponde un número de acciones, y cada transición está vinculada a una condición de transición.
Lista de componentes de E/S
En la lista de componentes de E/S se configuran los módulos de E/S y los módulos expertos de las distintas unidades centrales.
Lista de instrucciones (IL)
IL es un lenguaje de texto conforme a IEC 1131 en el que las operaciones, como, por ejemplo, las llamadas condicionales o incondicionales de bloques de función y funciones, los saltos condicionales o incondicionales, etc., se representan mediante instrucciones.
L
31004676 4/2006 xli
Glosario
Literal real con exponente
Los literales reales con exponente sirven para indicar los valores con coma flotante en el sistema decimal. Los literales reales con exponente se caracterizan por la indicación de la coma decimal. El exponente indica la potencia decimal por la que se debe multiplicar el número de partida para obtener el valor que hay que representar. La base puede ir precedida por el signo negativo (-). El exponente puede ir precedido por el signo negativo o positivo (+/-). Los guiones bajos individuales ( _ ) situados entre los números no son significativos. (Sólo entre cifras, pero no delante o detrás de la coma decimal y tampoco delante o detrás de "E", "E+" o "E-".)
Ejemplo-1.34E-12 ó -1.34e-121.0E+6 ó 1.0e+61.234E6 ó 1.234e6
Literales Los literales sirven para proporcionar directamente valores a las entradas de FFB, las condiciones de transición, etc. La lógica del programa no puede sobrescribir estos valores (están protegidos contra escritura). Se distingue entre literales genéricos y tipificados. Además, los literales sirven para asignar un valor a las constantes o un valor inicial a una variable. La entrada se efectúa en forma de literal de base 2, literal de base 8, literal de base 16, literal entero, literal real o literal real con exponente.
Literales de base 16
Los literales de base 16 sirven para indicar valores enteros en el sistema hexadecimal. La base debe identificarse mediante el prefijo 16#. Los valores no pueden ir precedidos por el signo (+/-). Los guiones bajos individuales ( _ ) situados entre los números no son significativos.
Ejemplo16#F_F o 16#FF (decimal 255)16#E_0 o 16#E0 (decimal 224)
Literales de base 2
Los literales de base 2 sirven para indicar valores enteros en el sistema dual. La base debe identificarse mediante el prefijo 0.91kg. Los valores no pueden ir precedidos por el signo (+/-). Los guiones bajos individuales ( _ ) situados entre los números no son significativos.
Ejemplo2#1111_1111 ó 2#11111111 (decimal 255) 2#1110_1111 ó 2#11100000 (decimal 224)
Literales de base 8
Los literales de base 8 sirven para indicar valores enteros en el sistema octal. La base debe identificarse mediante el prefijo 3.63kg. Los valores no pueden ir precedidos por el signo (+/-). Los guiones bajos individuales ( _ ) situados entre los números no son significativos.
xlii 31004676 4/2006

Glosario
Ejemplo8#3_1111 ó 8#377 (decimal 255) 8#34_1111 ó 8#340 (decimal 224)
Literales de duración
Las unidades permitidas para la duración (TIME) son días (D), horas (H), minutos (M), segundos (S) y milisegundos (MS) o combinaciones de ellas. La duración se debe identificar con el prefijo t#, T#, time# o TIME#. El "desborde" de la unidad de mayor valor está permitido; por ejemplo, la entrada T#25H15M es válida.
Ejemplot#14MS, T#14.7S, time#18M, TIME#19.9H, t#20.4D, T#25H15M, time#5D14H12M18S3.5MS
Literales enteros Los literales enteros sirven para indicar los valores enteros en el sistema decimal. Los valores pueden ir precedidos por el signo (+/-). Los guiones bajos individuales ( _ ) situados entre los números no son significativos.
Ejemplo-12, 0, 123_456, +986
Literales genéricos
Si no considera relevante el tipo de datos de un literal, indique solamente el valor para dicho literal. En este caso, Concept asignará al literal un tipo de datos adecuado de forma automática.
Literales reales Los literales reales sirven para indicar los valores con coma flotante en el sistema decimal. Los literales reales se caracterizan por la indicación de la coma decimal. Los valores pueden ir precedidos por el signo (+/-). Los guiones bajos individuales ( _ ) situados entre los números no son significativos.
Ejemplo-12.0, 0.0, +0.456, 3.14159_26
Literales tipificados
Si desea establecer usted mismo el tipo de datos de un literal, puede hacerlo con la siguiente construcción: ‘Nombre del tipo de datos’#‘Valor del literal’.
EjemploINT#15 (tipo de datos: entero, valor: 15), BYTE#00001111 (tipo de datos: Byte, valor: 00001111) REAL#23.0 (tipo de datos: real, valor: 23.0)
Para la asignación del tipo de datos REAL también se puede indicar el valor de la siguiente forma: 23.0. Indicando una posición de la coma se asigna automáticamente el tipo de datos REAL.
31004676 4/2006 xliii

Glosario
Llamada Proceso por el que se inicia la ejecución de una operación.
Located Variable A las Located variables se les asigna una dirección de memoria de señal (direcciones de referencia 0x, 1x, 3x, 4x). El valor de estas variables se almacena en la memoria de señal y se puede modificar online con el editor de datos de referencia. Para acceder a estas variables se puede utilizar su nombre simbólico o su dirección de referencia.
Todas las entradas y salidas del PLC están conectadas a la memoria de señal. El acceso del programa a señales periféricas conectadas al PLC se efectúa sólo mediante Located variables. Los accesos externos a través de las interfases Modbus o Modbus Plus del PLC, p. ej., por parte de sistemas de visualización, también son posibles mediante Located variables.
Macro Las macros se crean con ayuda del software DFB Concept.Las macros sirven para duplicar las secciones y redes que se utilizan con frecuencia (incluyendo su lógica, sus variables y su declaración de variables).Se distingue entre macros locales y globales.
Las macros tienen las siguientes propiedades:Sólo se pueden crear macros en los lenguajes de programación FBD y LD.Las macros contienen una única sección.Las macros pueden contener una sección todo lo compleja que se desee.Desde el punto de vista técnico, una macro para la que se ha creado un instancia, es decir, una macro insertada en una sección, no se distingue de una sección generada de forma convencional.Llamada de DFB en una macroDeclaración de variablesUtilización de estructuras de datos propias de la macroAceptación automática de las variables declaradas en la macroValores iniciales para variablesCreación de múltiples instancias de una macro en todo el programa con variables diferentesEl nombre de la sección, los nombres de las variables y el nombre de la estructura de datos pueden contener hasta 10 marcas de intercambio distintas (de @0 a @9).
Macros globales Las macros globales están disponibles en todos los proyectos de Concept y se encuentran en el directorio DFB, justo debajo del directorio Concept.
M
xliv 31004676 4/2006

Glosario
Macros locales Las macros locales sólo están disponibles en un único proyecto de Concept y se guardan en el directorio DFB bajo el directorio del proyecto.
Memoria de señal
La memoria de señal es el espacio de memoria para todas las magnitudes a las que se accede a través de referencias (representación directa) en el programa de la aplicación. Por ejemplo, en la memoria de señal hay bits de entrada, registros binarios, palabras de entrada y palabras binarias.
MMI Interfase hombre-máquina
Modo ASCII American Standard Code for Information Interchange (código estándar americano para el intercambio de información). El modo ASCII se utiliza para la comunicación con distintos dispositivos host. ASCII funciona con 7 bits de datos.
Modo RTU Remote Terminal Unit (unidad de terminal remota)El modo RTU se utiliza para la comunicación entre el PLC y un ordenador personal compatible con IBM. RTU funciona con 8 bits de datos.
Módulo SA85 El módulo SA85 es un adaptador Modbus Plus para ordenadores IBM-AT o compatibles.
Nombre de elemento
Identificador que pertenece a un determinado ejemplar de bloque de función. El nombre de elemento sirve para identificar sin posibilidad de confusión un bloque de función en una unidad organizativa del programa. El nombre de elemento se genera automáticamente, pero se puede modificar. El nombre de elemento debe ser único en toda la unidad organizativa del programa y, en este caso, no se distingue entre mayúsculas y minúsculas. Si ya existe el nombre indicado, aparecerá una advertencia y deberá seleccionar otro nombre. El nombre de instancia se debe formular de acuerdo con la nomenclatura IEC, si no, aparecerá un mensaje de error. El nombre de instancia generado de manera automática tiene siempre la estructura: FBI_n_m
FBI = elemento de bloque de funciónn = número de la sección (número correlativo)m = número del objeto FFB dentro de la sección (número correlativo)
N
31004676 4/2006 xlv

Glosario
Nombre del paso El nombre del paso sirve para identificar sin posibilidad de confusión a un paso dentro de una unidad organizativa del programa. El nombre del paso se genera automáticamente, pero se puede modificar. El nombre del paso debe ser único en toda la unidad organizativa del programa, si no, se generará un mensaje de error. El nombre de paso generado automáticamente tiene siempre la estructura: S_n_m
S = pason = número de la sección (número correlativo)m = número del paso dentro de la sección (número correlativo)
Nomenclatura IEC (identificador)
Un identificador es una secuencia de letras, números y guiones bajos que debe empezar por una letra o un guión bajo (p. ej., el nombre de un tipo de bloque de función, un elemento, una variable o una sección). Se pueden utilizar las letras propias de los juegos de caracteres nacionales (p. ej., ö, ü, é, õ), excepto en los nombres de proyecto y de DFB.Los guiones bajos son significativos en los identificadores, p. ej., "A_BCD" y "AB_CD" se interpretan como dos identificadores distintos. No se permiten varios guiones bajos iniciales ni seguidos.Los identificadores no pueden contener espacios en blanco. Las mayúsculas o minúsculas no son significativas, p. ej., "ABCD" y "abcd" se interpretan como el mismo identificador.Los identificadores no pueden ser palabras clave.
Operador Un operador es un símbolo para una operación booleana o aritmética que hay que realizar.
Operando Un operando es un literal, una variable, una llamada de función o una expresión.
O
xlvi 31004676 4/2006
Glosario
Palabras clave Las palabras clave son combinaciones únicas de caracteres que se utilizan como elementos sintácticos especiales tal como se define en el anexo B de la norma IEC 1131-3. Todas las palabras clave que se utilizan en la norma IEC 1131-3 y, por tanto, en Concept aparecen enumeradas en el anexo C de la norma IEC 1131-3. Las palabras clave de esta lista no se deberán utilizar para ningún otro fin, p. ej., como nombres de variables, de secciones, de elementos, etc.
Palabras de entrada (referencias 3x)
Una palabra de entrada contiene información que procede de una fuente externa y se representa mediante un número de 16 bits. Un registro 3x también puede contener 16 bits de entrada consecutivos cargados en el registro en formato binario o BCD (decimal codificado en binario). Nota: La x que aparece detrás de la primera cifra del tipo de referencia representa un lugar de almacenamiento de cinco posiciones en la memoria de datos de la aplicación; por ejemplo, la referencia 300201 significa una palabra de entrada de 16 bits en la dirección 201 de la memoria de señal.
Palabras de salida/marca (referencias 4x)
Una palabra de salida/marca puede utilizarse para almacenar datos numéricos (binarios o decimales) en la memoria de señal, o también para enviar los datos de la CPU a una unidad de salida del sistema de control. Nota: La x que aparece detrás de la primera cifra del tipo de referencia representa un lugar de almacenamiento de cinco posiciones en la memoria de datos de la aplicación; por ejemplo, la referencia 400201 significa una palabra de salida o marca de 16 bits en la dirección 201 de la memoria de señal.
Parámetro actual Parámetro de entrada/salida conectado actualmente.
Parámetro de entrada (entrada)
Transmite el argumento correspondiente al ejecutar un FFB.
Parámetros de salida (salida)
Parámetro con el que se devuelve el resultado o los resultados de la evaluación de un FFB.
Parámetros formales
Parámetros de entrada/salida que se utilizan dentro de la lógica de un FFB y se ejecutan como entradas/salidas desde el FFB.
Participante de red
Un participante es un dispositivo con una dirección (164) en la red Modbus-Plus.
Participante local de red
El participante local es aquél que se está configurando en este momento.
P
31004676 4/2006 xlvii

Glosario
Paso Elemento de lenguaje SFC: Situación en la que el comportamiento de un programa sigue, en lo que respecta a sus entradas y salidas, aquellas operaciones que se han definido mediante las correspondientes acciones del paso.
Paso inicial Primer paso de una cadena secuencial. En todas las cadenas secuenciales debe existir un paso inicial definido. La cadena secuencial se inicia con el paso inicial la primera vez que éste se ejecuta.
PLC Autómata programable
Portapapeles El portapapeles es una memoria temporal para objetos cortados o copiados. Estos objetos se pueden pegar en secciones. Cada vez que se vuelva a cortar o copiar, se sobrescribirá el contenido anterior del portapapeles.
PR (PROFIBUS) RP = periferia remota
Procesador Peer El procesador Peer procesa los ciclos de token y el flujo de datos entre la red Modbus-Plus y la lógica de la aplicación PLC.
Programa Máxima unidad organizativa del programa. Un programa se carga y se cierra en un único PLC.
Programar sistema redundante (Hot Standby)
Un sistema redundante está compuesto por dos equipos de PLC con idéntica configuración que se comunican entre sí mediante procesadores redundantes. En caso de que falle el PLC primario, el PLC secundario asume el control del mando. En condiciones normales, el PLC secundario no asume ninguna función de control, sino que comprueba la información de estado para detectar fallos.
Proyecto Denominación general del nivel superior de una estructura en árbol de un programa que determina el nombre de proyecto primario de una aplicación PLC. Después de establecer el nombre del proyecto, podrá guardar la configuración del sistema y el programa de control con este nombre. Todos los datos que se originan durante la creación de la configuración y del programa forman parte de este proyecto de nivel superior para la tarea de automatización específica.Denominación general del conjunto completo de la información de programación y planificación en la base de datos del proyecto que representa el código fuente que describe la automatización de una instalación.
Puente Un puente es un dispositivo que conecta redes. Permite la comunicación entre usuarios de las dos redes. Cada red tiene su propia secuencia de rotación de token. El token no se transmite a través de puentes.
Puertos serie En los puertos serie (COM) se transmite la información bit a bit.
xlviii 31004676 4/2006

Glosario
REAL REAL representa el tipo de datos "real". La entrada se efectúa como literal real o como literal real con exponente. La longitud del elemento de datos es de 32 bits. El rango de valores para variables de este tipo de datos va de 8.43E-37 a 3.36E+38.
Red Una red es la interconexión de dispositivos en una ruta de información común que se comunican entre sí mediante un mismo protocolo.
Red decentral (DIO)
La programación descentralizada en la red Modbus Plus permite alcanzar el máximo rendimiento en la transmisión de datos sin requisitos especiales en los vínculos. La programación de una red remota es muy sencilla. Para instalar la red no hace falta crear ninguna lógica adicional de esquema de contactos. Mediante las entradas correspondientes en el procesador Peer Cop se cumplen todos los requisitos para la transmisión de datos.
Referencia Cada dirección directa es una referencia que comienza por una clave que indica si se trata de una entrada o una salida o de un bit o una palabra. Las referencias que empiezan con la clave 6 representan registros de la memoria extendida de la memoria de señal. Rango 0x = salidas binarias Rango 1x = bits de entrada Rango 3x = palabras de entrada Rango 4x = palabras de salida/marca Rango 6x = registros en la memoria extendida
Registro en la memoria extendida (referencia 6x)
Las referencias 6x son palabras de marca en la memoria extendida del PLC. Sólo se pueden utilizar en programas de la aplicación LL984 y para utilizar una CPU 213 04 o CPU 424 02.
R
Nota: Dependiendo del tipo de procesador matemático de la CPU no será posible representar distintos rangos dentro del rango de valores permitidos. Esto es válido para valores cercanos a ZERO (cero)y a INFINITY (infinito). En tales casos, el modo de animación no mostrará un valor numérico, sino NAN (Not A Number) o INF (INFinite (infinito)).
Nota: La x que aparece detrás de la primera cifra de cada tipo de referencia representa un lugar de almacenamiento de cinco posiciones en la memoria de datos de la aplicación; por ejemplo, la referencia 400201 significa una palabra de salida o marca de 16 bits en la dirección 201 de la memoria de señal.
31004676 4/2006 xlix

Glosario
Representación directa
Método para la representación de variables en el programa de PLC del que se puede derivar directamente la asignación del lugar de almacenamiento lógico (e indirectamente el lugar de almacenamiento físico).
RIO (Remote I/O) La estación de E/S remota indica un lugar físico de los dispositivos de control de puntos de E/S en relación con el procesador que los controla. Las entradas/salidas remotas están conectadas al dispositivo de control a través de un cable de comunicación.
Salida/registros binarios (referencias 0x)
Un bit de salida/marca se puede utilizar para controlar los datos de salida reales mediante una unidad de salida del sistema de control o para definir una o varias salidas binarias en la memoria de señal. Nota: La x que aparece detrás de la primera cifra del tipo de referencia representa un lugar de almacenamiento de cinco posiciones en la memoria de datos de la aplicación, por ejemplo, la referencia 000201 significa un bit de salida/marca en la dirección 201 de la memoria de señal.
Salto Elemento del lenguaje SFC. Los saltos se utilizan para saltar áreas de la cadena secuencial.
Sección Una sección se puede utilizar, por ejemplo, para describir el funcionamiento de una unidad tecnológica, como un motor.Un programa o DFB está compuesto de una o más secciones. Las secciones se pueden programar con los lenguajes de programación IEC FBD y SFC. Dentro de una sección sólo se puede utilizar uno de los lenguajes de programación mencionados.Cada sección tiene su propia ventana de documento en Concept. Para tener una mejor visión de conjunto, es mejor dividir una sección grande en varias más pequeñas. Para desplazarse dentro de la sección se utiliza la barra de desplazamiento.
Secuencia de bits
Elemento de datos compuesto por uno o varios bits.
Símbolo (icono) Representación gráfica de distintos objetos en Windows, p. ej., unidades de disco, programas de aplicación y ventanas de documento.
S
l 31004676 4/2006
Glosario
SY/MAX En los dispositivos de control Quantum, Concept incluye la preparación de la dotación de E/S para módulos de E/S SY/MAX para el control RIO mediante el PLC Quantum. El bastidor remoto SY/MAX tiene un adaptador remoto de E/S en el slot 1 que se comunica mediante un sistema de E/S Modicon S908 R. Los módulos de E/S SY/MAX se incluyen en la dotación de E/S de la configuración de Concept para marcarlos e integrarlos.
Texto estructurado (ST)
ST es un lenguaje de texto conforme a IEC 1131, en el que las operaciones, como, por ejemplo, las llamadas de bloques de función y funciones, la ejecución condicionada de instrucciones, la repetición de instrucciones, etc., se representan mediante instrucciones.
TIME TIME representa el tipo de datos "duración". La entrada se realiza como literal de duración. La longitud del elemento de datos es de 32 bits. El rango de valores para las variables de este tipo de datos va de 0 a 2exp(32)-1. La unidad para el tipo de datos TIME es 1 ms.
Tipo de bloque de función
Elemento de lenguaje compuesto por: 1. La definición de una estructura de datos, dividida en variables de entrada, de salida e internas; 2. Un conjunto de operaciones que se realizan con los elementos de la estructura de datos cuando se ejecuta una instancia del tipo de bloque de función. Este conjunto de operaciones puede estar formulado en uno de los lenguajes IEC (tipo DFB) o en "C" (tipo EFB). Un tipo de bloque de función se puede mostrar como instancia (ejecutar) varias veces.
Tipo de datos derivado
Los tipos de datos derivados son tipos de datos que se han derivado de los tipos de datos elementales y/o de otros tipos de datos derivados. La definición de los tipos de datos derivados se realiza en el editor de tipos de datos de Concept.Se distingue entre tipos de datos globales y tipos de datos locales.
Tipo de datos genérico
Tipo de datos que sustituye a otros tipos de datos.
Tipos de datos La visión general muestra la jerarquía de los tipos de datos tal como se utilizan en las entradas y salidas de funciones y bloques de función. Los tipos de datos genéricos se identifican mediante el prefijo "ANY".
ANY_ELEMANY_NUMANY_REAL (REAL)ANY_INT (DINT, INT, UDINT, UINT)ANY_BIT (BOOL, BYTE, WORD)
T
31004676 4/2006 li
Glosario
TIMETipos de datos de sistema (expansiones IEC)Derivado (de los tipos de datos ’ANY’)
Tipos de datos derivados globales
Los tipos de datos derivados globales están disponibles en todos los proyectos de Concept y se encuentran en el directorio DFB, justo debajo del directorio Concept.
Tipos de datos derivados locales
Los tipos de datos derivados locales sólo están disponibles en un único proyecto de Concept y sus DFB locales, y se guardan en el directorio DFB bajo el directorio del proyecto.
Token La red "Token" controla la propiedad temporal del derecho de transmisión por parte de un único participante. El Token recorre los participantes en una secuencia de direcciones circular (ascendente). Todos los participantes siguen el recorrido del token y pueden recibir todos los datos posibles enviados.
Traffic Cop Traffic Cop es una lista de componentes que se genera a partir de la lista de componentes del usuario. La lista Traffic Cop se gestiona en el PLC y contiene, además de la lista de componentes del usuario, información de estado de los módulos y las estaciones de E/S, por ejemplo.
Transición Condición necesaria para que el control pase de uno o más pasos predecesores a uno o más pasos sucesores a lo largo de una conexión direccional.
UDEFB Funciones/bloques de función elementales definidos por el usuarioFunciones o bloques de función creados con el lenguaje de programación C y disponibles en las bibliotecas de Concept.
UDINT UDINT representa el tipo de datos "número entero de longitud doble sin signo (unsigned double integer)". La entrada se efectúa en forma de literal entero, literal de base 2, literal de base 8 o literal de base 16. La longitud del elemento de datos es de 32 bits. El rango de valores para las variables de este tipo de datos va de 0 a 2exp(32)-1.
UINT UINT representa el tipo de datos "número entero sin signo (unsigned integer)". La entrada se efectúa en forma de literal entero, literal de base 2, literal de base 8 o literal de base 16. La longitud del elemento de datos es de 16 bits. El rango de valores para las variables de este tipo de datos va de 0 a (2exp 16)-1.
U
lii 31004676 4/2006

Glosario
Unidad organizativa del programa
Función, bloque de función o programa. Este término se puede referir tanto a un tipo como a un elemento.
Unlocated Variable
A las Unlocated variables no se les asigna ninguna dirección de memoria de señal. Por lo tanto, tampoco ocupan ninguna dirección de memoria de señal. El sistema almacena el valor de estas variables, que se puede modificar con el editor de datos de referencia, de forma interna. A estas variables sólo se accede mediante su nombre simbólico.
Las señales que no necesitan acceso a la periferia, p. ej., resultados intermedios, marcas de sistema, etc., deberían declararse preferiblemente como Unlocated variables.
Valor inicial Valor asignado a una variable durante el inicio del programa. La asignación del valor se realiza en forma de literal.
Variables Las variables sirven para el intercambio de datos dentro de una misma sección, entre secciones distintas y entre el programa y el PLC.Las variables se componen como mínimo de un nombre de variable y un tipo de datos.Si se asigna una dirección directa (referencia) a una variable, se habla de una Located variable. Si a una variable no se le asigna ninguna dirección directa, se habla de una Unlocated variable. Si a la variable se le asigna un tipo de datos derivado, se habla de una variable de elementos múltiples.Además, también existen constantes y literales.
Variables de campo
Variables a las que se les ha asignado un tipo de datos derivado con ayuda de la palabra clave ARRAY (campo). Un campo es una colección de elementos de datos con el mismo tipo de datos.
Variables de elementos múltiples
Variables a las que se ha asignado un tipo de datos derivado definido con STRUCT o ARRAY.Se distingue entre variables de campo y variables estructuradas.
Variables estructuradas
Variables a las que se ha asignado un tipo de dato derivado definido con STRUCT (estructura).Una estructura es una colección de elementos de datos de distintos tipos en general (tipos de datos elementales y/o tipos de datos derivados).
V
31004676 4/2006 liii

Glosario
Ventana activa Ventana seleccionada en este momento. Sólo puede haber una ventana activa cada vez. Cuando se activa una ventana, cambia el color de su barra de título para distinguirla de las demás ventanas. Las ventanas no seleccionadas están inactivas.
Ventana de documento
Ventana dentro de una ventana de aplicación. Dentro de una ventana de aplicación puede haber abiertas varias ventanas de documento al mismo tiempo. No obstante, sólo puede haber una ventana de documento activa. Las ventanas de documento en Concept son, por ejemplo, las secciones, la ventana de mensajes, el editor de datos de referencia y la configuración del PLC.
Ventana de la aplicación
Ventana que contiene el área de trabajo, la barra de menús y la barra de herramientas para el programa de la aplicación. El nombre del programa de la aplicación aparece en la barra de título. Una ventana de la aplicación puede contener varias ventanas de documento. En Concept, la ventana de aplicación corresponde a un proyecto.
Vertical Vertical significa que la página del texto impreso es más alta que ancha.
WORD WORD representa el tipo de datos "secuencia de bits 16". La entrada se efectúa en forma de literal de base 2, literal de base 8 o literal de base 16. La longitud del elemento de datos es de 16 bits. A este tipo de datos no se le puede asignar un margen de valores numérico.
Zoom DX Esta propiedad permite conectarse a un objeto de programación para observar y, en caso necesario, modificar los valores de los datos.
W
Z
liv 31004676 4/2006

CBAÍndice
AAbierto horizontal
red de ecuación, 58ABS, 69AD16, 115ADD, 119Adición, 119
AD16, 115ADD, 119
Adición de coma flotante, 293Adición de doble precisión, 287Adición de entero + coma flotante, 299Administrador central de alarmas, 865Agrupar expresiones en capas intercaladas de paréntesis
red de ecuación, 55Alarmas y conversión de unidades físicas, 537Algoritmos PID, 945Añadir 16 Bits, 115AND, 123And lógico, 123Antilogaritmo de base 10, 305Apoyo del módulo ESI, 515ARCCOS, 69Arcocoseno de coma flotante de un ángulo (en radianes), 311Arcoseno de coma flotante de un ángulo en radianes (en radianes), 317Arcotangente de coma flotante de un ángulo (en radianes), 323ARCSIN, 69
31004676 4/2006
ARCTAN, 69Argumento
límites, 70red de ecuación, 70
ASCII FunctionsREAD, 1017WRIT, 1179
BBCD, 129Biblioteca de funciones de regulación de procesos, 851Bit normal abierto, 833Bit normal cerrado, 829BLKM, 133BLKT, 137Bloque a tabla, 137Bloquear interrupt, 673BMDI, 141Bobina
mensajes de error, 58red de ecuación, 57
Bobina de salidared de ecuación, 57
Booleano, 61BROT, 145Buscar, 1071
lv

Index
CCalculadora de ecuaciones formateadas, 893Cálculo de fórmula preestablecida, 881Cálculo de la tasa diferencial durante un periodo específico, 957Cálculo del promedio de entradas ponderadas, 875Cálculos avanzados, 852Cambio de signo de un número de coma flotante, 329Capa intercalada
paréntesis, 55Captación automática de datos de medidas para el apoyo de lectura/escritura PCMCIA, 237Cargar el valor de coma flotante de "Pi", 449Cargar Flash, 719CHS, 167CKSM, 175CMPR, 181Código binario a binario, 129Coils, 97Cola de espera de retardo, 887Coma flotante a entero, 561Coma flotante dividido por entero, 383Combinaciones de datos
red de ecuación, 71COMP, 195Comparación de coma flotante, 335Comparación de entero y coma flotante, 341Comparación de entrada, 665Comparación de modelos de bits
CMPR, 181Comparar registro, 181Complementar una matriz, 195Comunicaciones
MSTR, 767Conexión horizontal
red de ecuación, 58Configuración de Hot standby, 167constante
red de ecuación, 55
lvi
Contacto de liberaciónabierto horizontal, 58conexión horizontal, 58normalmente abierto, 58normalmente cerrado, 58
Contacto normalmente abiertored de ecuación, 58
Contacto normalmente cerradored de ecuación, 58
Contacts, 97Contador progresivo, 1163Contador regresivo, 217Control de bits, 825Control de regulación, 852Control de regulación de bucle cerrado, 75Controlador de ratio para cuatro estaciones, 961Conversión
BCD a binario, 129binario a BCD, 129
Conversión de coma flotante a entero, 353Conversión de coma flotante de grados a radianes, 347Conversión de coma flotante de radianes a grados, 365Conversión de entero a coma flotante, 359Conversiones de datos
red de ecuación, 71Coprocesador matemático
diferencias de redondeo, 73COS, 69COSD, 69Coseno de coma flotante de un ángulo (en radianes), 371Counters / Timers
T.01 - Temporizador, 1135T1.0 - Temporizador, 1143
Counters/TimersDCTR, 217T0.1 - Temporizador, 1139T1MS - Temporizador, 1147UCTR, 1163
Creación de una red de ecuación, 56
31004676 4/2006

Index
DDatos
ecuación matemática, 61Datos de la constante
coma flotante, 62ecuación matemática, 62larga (32 bits), 62LSB (byte menos significativo), 62
Datos de variableecuación matemática, 61
DCTR, 217Diferencias de redondeo
red de ecuación, 73DIOH, 221DIV, 231División, 231División de 16 bits, 261División de coma flotante, 389División de doble precisión, 377DLOG, 237DRUM, 255DV16, 261DX cargables
HLTH, 633ICMP, 665MAP 3, 723MBUS, 747MRTM, 757NOL, 837PEER, 985
EE/S inmediatas, 681Ecuación matemática
datos de la constante, 62notación exponencial, 63valores y tipos de datos, 60
Editor de lógicared de ecuación, 55, 56
Ejemplo de control de nivel con PID2, 84Ejemplo de PID, 81Elevar un número de coma flotante a una potencia entera, 455EMTH, 279
31004676 4/2006
EMTH-ADDDP, 287EMTH-ADDFP, 293EMTH-ADDIF, 299EMTH-ANLOG, 305EMTH-ARCOS, 311EMTH-ARSIN, 317EMTH-ARTAN, 323EMTH-CHSIN, 329EMTH-CMPFP, 335EMTH-CMPIF, 341EMTH-CNVDR, 347EMTH-CNVFI, 353EMTH-CNVIF, 359EMTH-CNVRD, 365EMTH-COS, 371EMTH-DIVDP, 377EMTH-DIVFI, 383EMTH-DIVFP, 389EMTH-DIVIF, 395EMTH-ERLOG, 401EMTH-EXP, 407EMTH-LNFP, 413EMTH-LOG, 419EMTH-LOGFP, 425EMTHMULDP, 431EMTH-MULFP, 437EMTH-MULIF, 443EMTH-PI, 449EMTH-POW, 455EMTH-SINE, 461EMTH-SQRFP, 467EMTH-SQRT, 473EMTH-SQRTP, 479EMTH-SUBDP, 485EMTH-SUBFI, 491EMTH-SUBFP, 497EMTH-SUBIF, 503EMTH-TAN, 509Entero a coma flotante, 707Entero dividido por coma flotante, 395Entrada analógica, 859Escribir, 1179Escritura
MSTR, 777Escritura en memoria extendida, 1229Escritura indirecta de bloque, 661
lvii

Index
ESI, 515Especial
PCFL-PID, 945PCPCFL-INTEGFL, 899
Establecer bit, 1047Establecer la entrada en modo automático o manual, 929Estadísticas de red Modbus Plus
MSTR, 800Estadísticas Ethernet TCP/IP
MSTR, 805Estado, 1077Estado funcional de E/S distribuidas, 221Etiqueta para una subrutina, 715EUCA, 537EXP, 69Expresión
red de ecuación, 66Expresión algebraica
red de ecuación, 58Expresión condicional
red de ecuación, 55, 66Expresión lógica
red de ecuación, 55Expresión única
red de ecuación, 66
FFast I/O Instructions
ID, 673IE, 677ITMR, 699
Filtro diferenciador o de retardo de primer orden, 925FIN, 551First In, 551First out, 555FIX, 69FLOAT, 69FOUT, 555FTOI, 561
lviii
FunciónABS, 69ARCCOS, 69ARCSIN, 69ARCTAN, 69argumento, 70COS, 69COSD, 69EXP, 69FIX, 69FLOAT, 69introducción en red de ecuación, 70límites de argumento, 70LN, 69LOG, 69SIN, 69SIND, 69SQRT, 69TAN, 69TAND, 69
Función exponencial de coma flotante, 407Función matemática
ARCCOS, 69ARCSIN, 69ARCTAN, 69argumento, 70COS, 69COSD, 69EXP, 69FIX, 69FLOAT, 69introducción en red de ecuación, 70límites de argumento, 70LN, 69LOG, 69red de ecuación, 69SIN, 69SIND, 69SQRT, 69TAN, 69TAND, 69
función matemáticaABS, 69
Funciones Modbus, 1187
31004676 4/2006

Index
GGrupos de instrucciones, 41
Coils, Contacts e Interconnects, 54instrucciones de comunicación ASCII, 43instrucciones del grupo Counters and Timers, 44instrucciones del grupo Fast I/O, 45instrucciones del grupo Math, 47instrucciones del grupo Matrix, 49instrucciones del grupo Move, 51instrucciones del grupo Special, 53Loadable DX, 46Miscellaneous, 50Skips/Specials, 52vista general, 42
Guardar Flash, 1041
HHabilitar interrupt, 677HLTH, 633Hot standby
CHS, 167
IIBKR, 657IBKW, 661ICMP, 665ID, 673IE, 677IMIO, 681IMOD, 689Instalación de instrucciones cargables DX, 107Instrucción
Coils, Contacts e Interconnects, 97Instrucción de módulo de interrupt, 689Instrucciones del grupo Fast I/O
BMDI, 141Instrucciones del grupo Fast I/O Instructions
IMIO, 681IMOD, 689
Integrar entrada en el intervalo especificado, 899
31004676 4/2006
Interconnects, 97Interfases de control secuencial, 1051ITMR, 699ITOF, 707
JJSR, 711
LLAB, 715Lectura, 1017
MSTR, 779Lectura de memoria extendida, 1223Lectura indirecta de bloque, 657Limitador de velocidad para cambios en la entrada de valor real, 915Limitador para la entrada de valor real, 911LL984
AD16, 115ADD, 119AND, 123BCD, 129BLKM, 133BLKT, 137BMDI, 141BROT, 145CHS, 167CKSM, 175CMPR, 181Coils, Contacts e Interconnects, 97COMP, 195control de regulación de bucle cerrado/
lix

Index
valores analógicos, 75DCTR, 217DIOH, 221DIV, 231DLOG, 237DRUM, 255DV16, 261EMTH, 279EMTH-ADDDP, 287EMTH-ADDFP, 293EMTH-ADDIF, 299EMTH-ANLOG, 305EMTH-ARCOS, 311EMTH-ARSIN, 317EMTH-ARTAN, 323EMTH-CHSIN, 329EMTH-CMPFP, 335EMTH-CMPIF, 341EMTH-CNVDR, 347EMTH-CNVFI, 353EMTH-CNVIF, 359EMTH-CNVRD, 365EMTH-COS, 371EMTH-DIVDP, 377EMTH-DIVFI, 383EMTH-DIVFP, 389EMTH-DIVIF, 395EMTH-ERLOG, 401EMTH-EXP, 407EMTH-LNFP, 413EMTH-LOG, 419EMTH-LOGFP, 425EMTH-MULDP, 431EMTH-MULFP, 437EMTH-MULIF, 443EMTH-PI, 449EMTH-POW, 455EMTH-SINE, 461EMTH-SQRFP, 467EMTH-SQRT, 473EMTH-SQRTP, 479EMTH-SUBDP, 485EMTH-SUBFI, 491EMTH-SUBFP, 497EMTH-SUBIF, 503EMTH-TAN, 509
lx
ESI, 515EUCA, 537FIN, 551FOUT, 555FTOI, 561HLTH, 633IBKR, 657IBKW, 661ICMP, 665ID, 673IE, 677IMIO, 681IMOD, 689ITMR, 699ITOF, 707JSR, 711LAB, 715LOAD, 719MAP 3, 723MBIT, 741MBUS, 747mensajes formateados para operaciones
31004676 4/2006
Index
ASCII READ/WRIT, 89MRTM, 757MSTR, 767MU16, 815MUL, 819NBIT, 825NCBT, 829NOBT, 833NOL, 837OR, 845PCFL, 851PCFL-AIN, 859PCFL-ALARM, 865PCFL-AOUT, 871PCFL-AVER, 875PCFL-CALC, 881PCFL-DELAY, 887PCFL-EQN, 893PCFL-INTEG, 899PCFL-KPID, 903PCFL-LIMIT, 911PCFL-LIMV, 915PCFL-LKUP, 919PCFL-LLAG, 925PCFL-MODE, 929PCFL-ONOFF, 933PCFL-PI, 939PCFL-PID, 945PCFL-RAMP, 951PCFL-RATE, 957PCFL-RATIO, 961PCFL-RMPLN, 967PCFL-SEL, 973PCFL-TOTAL, 979PEER, 985PID2, 991R --> T, 1007RBIT, 1013READ, 1017RET, 1023SAVE, 1041SBIT, 1047SCIF, 1051SENS, 1057SRCH, 1071STAT, 1077
31004676 4/2006
SU16, 1107SUB, 1111T.01 - Temporizador, 1135T-->R, 1123T-->T, 1129T0.1 - Temporizador, 1139T1.0 - Temporizador, 1143T1MS - Temporizador, 1147TBLK, 1153TEST, 1159UCTR, 1163utilización de interrupt, 103utilización de subrutinas, 105WRIT, 1179XMRD, 1223XMWT, 1229XOR, 1235
LN, 69LOAD, 719Loadable DX
CHS, 167DRUM, 255ESI, 515EUCA, 537instalación, 107
LOG, 69Logaritmo común de coma flotante, 425Logaritmo de base 10, 419Logaritmo natural de coma flotante, 413LSB (byte menos significativo)
datos de la constante, 62
MMAP 3, 723Master, 767Matemática extendida, 279
lxi

Index
MathAD16, 115ADD, 119BCD, 129DIV, 231DV16, 261FTOI, 561ITOF, 707MU16, 815MUL, 819SU16, 1107SUB, 1111TEST, 1159
Matrices de historia y estado, 633Matrix
AND, 123BROT, 145CMPR, 181COMP, 195MBIT, 741NBIT, 825NCBT, 829, 833OR, 845RBIT, 1013SBIT, 1047SENS, 1057XOR, 1235
MBIT, 741MBUS, 747Mensajes formateados, 89
lxii
MiscellaneousCKSM, 175DLOG, 237EMTH, 279EMTH-ADDDP, 287EMTH-ADDFP, 293EMTH-ADDIF, 299EMTH-ANLOG, 305EMTH-ARCOS, 311, 371EMTH-ARSIN, 317EMTH-ARTAN, 323EMTH-CHSIN, 329EMTH-CMPFP, 335EMTH-CMPIF, 341EMTH-CNVDR, 347EMTH-CNVFI, 353EMTH-CNVIF, 359EMTH-CNVRD, 365EMTH-DIVDP, 377EMTH-DIVFI, 383EMTH-DIVFP, 389EMTH-DIVIF, 395EMTH-ERLOG, 401EMTH-EXP, 407EMTH-LNFP, 413EMTH-LOG, 419EMTH-LOGFP, 425EMTH-MULDP, 431EMTH-MULFP, 437EMTH-MULIF, 443EMTH-PI, 449EMTH-POW, 455EMTH-SINE, 461EMTH-SQRFP, 467EMTH-SQRT, 473EMTH-SQRTP, 479EMTH-SUBDP, 485EMTH-SUBFI, 491EMTH-SUBFP, 497EMTH-SUBIF, 503EMTH-TAN, 509LOAD, 719MSTR, 767SAVE, 1041SCIF, 1051XMRD, 1223
31004676 4/2006

Index
XMWT, 1229Modbus Plus
MSTR, 767Modificar bit, 741Módulo de transferencia multirregistro, 757Módulo opcional de red para Lonworks, 837Move
BLKM, 133BLKT, 137FIN, 551FOUT, 555IBKR, 657IBKW, 661R --> T, 1007SRCH, 1071T-->R, 1123T-->T, 1129TBLK, 1153
Mover bloque, 133Mover bloque con interrupts bloqueados, 141MRTM, 757MSTR, 767
Borrado de estadísticas locales, 783Borrar estadísticas remotas, 789códigos de error CTE para Ethernet SY/MAX y TCP/IP, 814Códigos de error específicos de SY/MAX, 809códigos de error Ethernet TCP/IP, 811Códigos de error Modbus Plus y Ethernet SY/MAX, 807Escritura de datos globales, 785Escritura en CTE (tabla de extensión de configuración), 798Estadísticas de red Modbus Plus, 800Estadísticas Ethernet TCP/IP, 805Estado funcional de Peer Cop, 791Lectura de CTE (tabla de extensión de configuración), 796Lectura de datos globales, 786Obtención de estadísticas locales, 781Obtención de estadísticas remotas, 787Reinicio módulo opcional, 794
MU16, 815MUL, 819
31004676 4/2006
Multiplicación, 819Multiplicación de 16 bits, 815Multiplicación de coma flotante, 437Multiplicación de doble precisión, 431Multiplicación de entero x coma flotante, 443
NNBIT, 825NCBT, 829NOBT, 833NOL, 837notación algebraica
red de ecuación, 55Notación exponencial
ecuación matemática, 63notación infijo
red de ecuación, 56
OOperación matemática
operador a nivel de bit, 64operador aritmético, 64operador condicional, 64operador de asignación, 64operador relacional, 64operador unario, 64paréntesis, 64red de ecuación, 64
operación matemáticaoperador de exponenciación, 64
Operaciones READ/WRIT, 89Operador a nivel de bit, 64Operador aritmético, 64Operador condicional, 64Operador de asignación, 64Operador de exponenciación, 64Operador matemático
red de ecuación, 55Operador relacional, 64Operador unario, 64OR, 845OR exclusivo, 1235OR lógico, 845
lxiii
Index
PPalabra
máximo en una red de ecuación, 59Palabras utilizadas
datos de la constante, 62ecuación matemática, 61
Paréntesisintroducción en una red de ecuación, 68utilización en una red de ecuación, 68
paréntesiscapa intercalada, 55intercalados, 68red de ecuación, 55
Paréntesis intercaladosred de ecuación, 68
PCFL, 851PCFL-AIN, 859PCFL-ALARM, 865PCFL-AOUT, 871PCFL-AVER, 875PCFL-CALC, 881PCFL-DELAY, 887PCFL-EQN, 893PCFL-INTEG, 899PCFL-KPID, 903PCFL-LIMIT, 911PCFL-LIMV, 915PCFL-LKUP, 919PCFL-LLAG, 925PCFL-MODE, 929PCFL-ONOFF, 933PCFL-PI, 939PCFL-PID, 945PCFL-RAMP, 951PCFL-RATE, 957PCFL-RATIO, 961PCFL-RMPLN, 967PCFL-SEL, 973PCFL-TOTAL, 979PEER, 985PI no interactivo de ISA, 939PID no interactiva de ISA expandida, 903PID2, 991Prioridad
red de ecuación, 67
lxiv
Prioridad de operadorred de ecuación, 67
Proporcional-integral-diferencial, 991Protocolarización de errores de coma flotante, 401Puesta a cero de bit, 1013
RR --> T, 1007Raíz cuadrada de coma flotante, 467, 473Raíz cuadrada de proceso, 479Rampa logarítmica para valor de consigna, 967Rampa para el valor de consigna con una tasa de crecimiento constante, 951RBIT, 1013READ, 1017Red de ecuación
ABS, 69ARCCOS, 69ARCSIN, 69ARCTAN, 69argumento, 70bobina de salida, 57constante, 55contacto de liberación, 58contenido, 58conversiones de datos, 71COS, 69COSD, 69creación, 56descripción general, 55diferencias de redondeo, 73editor de lógica, 55EXP, 69expresión algebraica, 58expresión condicional, 55, 66expresión lógica, 55expresión única, 66
31004676 4/2006

Index
expresiones de grupo en capas intercaladas de paréntesis, 55FIX, 69FLOAT, 69función matemática, 69introducción de función, 70introducción de paréntesis, 68límites de argumento, 70LN, 69LOG, 69matemática, 60notación algebraica, 55operación matemática, 64operador a nivel de bit, 64operador aritmético, 64operador condicional, 64operador de asignación, 64operador de exponenciación, 64operador matemático, 55operador relacional, 64operador unario, 64palabras utilizadas, 59paréntesis, 64, 68paréntesis intercalados, 68prioridad de operador, 67rendimiento de referencia, 74resultado, 58SIN, 69SIND, 69SQRT, 69tamaño, 59TAN, 69TAND, 69variable, 55
Referencia binariaecuación matemática, 61
Registro 3x o 4xintroducción en una ecuación matemática, 62
Registro a tabla, 1007Registros utilizados
ecuación matemática, 61Rendimiento de referencia
red de ecuación, 74Resultado
red de ecuación, 58
31004676 4/2006
RET, 1023Retorno desde una subrutina, 1023Rotación de bits, 145
SSalida analógica, 871Saltar a una subrutina, 711SAVE, 1041SBIT, 1047SCIF, 1051Secuenciador de tambor, 255Selección de entrada, 973Seno de coma flotante de un ángulo (en radianes), 461SENS, 1057Sensado, 1057SIN, 69SIND, 69Skips/Specials
JSR, 711LAB, 715RET, 1023
lxv

Index
SpecialDIOH, 221PCFL, 851PCFL-, 871PCFL-AIN, 859PCFL-ALARM, 865PCFL-AVER, 875PCFL-CALC, 881PCFL-DELAY, 887PCFL-EQN, 893PCFL-KPID, 903PCFL-LIMIT, 911PCFL-LIMV, 915PCFL-LKUP, 919PCFL-LLAG, 925PCFL-MODE, 929PCFL-ONOFF, 933PCFL-PI, 939PCFL-RAMP, 951PCFL-RATE, 957PCFL-RATIO, 961PCFL-RMPLN, 967PCFL-SEL, 973PCFL-TOTAL, 979PID2, 991STAT, 1077
SQRT, 69SRCH, 1071STAT, 1077SU16, 1107SUB, 1111Subfución EMTH
EMTH-COS, 371
lxvi
Subfunción de EMTHEMTH-ADDDP, 287EMTH-ADDFP, 293EMTH-CHSIN, 329EMTH-CMPFP, 335EMTH-CMPIF, 341EMTH-CNVDR, 347EMTH-CNVIF, 359EMTH-CNVRD, 365EMTH-DIVDP, 377EMTH-DIVFI, 383EMTH-DIVIF, 395EMTH-ERLOG, 401EMTH-LNFP, 413EMTH-LOG, 419EMTH-LOGFP, 425EMTH-MULDP, 431EMTH-SUBFI, 491EMTH-TAN, 509
Subfunción de PCFLPCFL-AIN, 859PCFL-ALARM, 865PCFL-AOUT, 871PCFL-AVER, 875PCFL-CALC, 881PCFL-DELAY, 887PCFL-EQN, 893PCFL-LKUP, 919PCFL-MODE, 929PCFL-ONOFF, 933PCFL-RAMP, 951PCFL-RATE, 957PCFL-RATIO, 961PCFL-RMPLN, 967PCFL-SEL, 973PCFL-TOTAL, 979
31004676 4/2006

Index
Subfunción EMTHEMTH-ADDFP, 299EMTH-ANLOG, 305EMTH-ARCOS, 311EMTH-ARSIN, 317EMTH-ARTAN, 323EMTH-CNVFI, 353EMTH-DIVFP, 389EMTH-EXP, 407EMTH-MULFP, 437EMTH-MULIF, 443EMTH-PI, 449EMTH-POW, 455EMTH-SINE, 461EMTH-SQRFP, 467EMTH-SQRT, 473EMTH-SQRTP, 479EMTH-SUBDP, 485EMTH-SUBFP, 497
Subfunción PCFLPCFL-KPID, 903PCFL-LIMIT, 911PCFL-LIMV, 915PCFL-LLAG, 925PCFL-PI, 939PCFL-PID, 945
Subfunciones de PCFLgeneralidades, 77
Subsfunción de EMTHEMTH-SUBIF, 503
Substracción, 1111Substracción de 16 bits, 1107Substracción de coma flotante, 497Substracción de coma flotante menos entero, 491Substracción de doble precisión, 485Substracción de entero menos coma flotante, 503Suma de control, 175Sunbfunción de PCFL
PCFL-INTEG, 899
31004676 4/2006
TT.01 - Temporizador, 1135T-->R, 1123T-->T, 1129T0.1 - Temporizador, 1139T1.0 - Temporizador, 1143T1MS - Temporizador, 1147Tabla a bloque, 1153Tabla a registro, 1123Tabla a tabla, 1129Tabla de linearización por interpolación, 919TAN, 69TAND, 69Tangente de coma flotante de un ángulo (en radianes), 509TBLK, 1153Temporizador de centésimas de segundo, 1135Temporizador de décimas de segundo, 1139Temporizador de interrupt, 699Temporizador de milisegundos, 1147Temporizador de segundos, 1143TEST, 1159Tipos de datos mezclados
red de ecuación, 71Totalizador para flujo dosificado, 979Transacción MAP, 723Transacción MBUS, 747Transacción PEER, 985
UUC
diferencias de redondeo, 73tiempo de exploración, 74
UC Quantumdiferencias de redondeo, 73
UCTR, 1163Utilización de interrupt, 103Utilización de subrutinas, 105
lxvii
Index
VValores analógicos, 75Valores de activo/inactivo para banda muerta, 933Valores y tipos de datos
ecuación matemática, 60variable
red de ecuación, 55Variable de 16 bits con signo, 61Variable de 16 bits sin signo, 61Variable de coma flotante, 61Variable de proceso, 76Variable de valor de consigna, 76Variable larga (32 bits) con signo, 61Variable larga (32 bits) sin signo, 61Verificación de 2 valores, 1159
WWRIT, 1179
XXMRD, 1223XMWT, 1229XOR, 1235
lxviii
31004676 4/2006




























