Embed Size (px)
Citation preview

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 1/36
Sistemi di Regolazione
MOOG ITALIANA S.R.L. Via dei Tre Corsi - 21046 Malnate (VA)
Tel. 0332 - 421111 Fax 0332 - 429233
L129-036-B001
INSTRUCTION MANUAL
Revision : C Number of Pages : 36 Written :_________________ Checked :_________________ F.T. Approved :_________________ A.Q. Approved :_________________ Date : April 6, 2000

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 2/36
Copyright and limited warranty. This manual is Copyright by MOOG. All rights reserved. No part of this manual shall be reproduced or transmitted by any means, electronic, mechanical, photocopying, recording or otherwise, without the written permission by MOOG. Although every effort has been made to insure the accuracy of the informations in this manual, MOOG assumes no responsibility for errors or omissions. MOOG shall not be liable to the user of this manual, or his customers, form any direct, indirect, special, incidental, consequential, or other damages deriving from the use of informations contained herein. MOOG expressly disclaims any implied warranty.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 3/36
TABLE OF CONTENTS
1 FUNCTIONAL DESCRIPTION..............................................................................................................5
2 FRONT PANEL ...................................................................................................................................5 2.1 MODE SWITCH.........................................................................................................................5 2.2 MODE INDICATOR....................................................................................................................5 2.3 SAFETY MODE INDICATOR ......................................................................................................5 2.4 CALIBRATION TOOL CONNECTOR............................................................................................5 2.5 TRIMMERS FOR CALIBRATIONS IN THE FIELD..........................................................................5
3 CONNECTIONS ..................................................................................................................................6 3.1 POSITION TRANSDUCER..........................................................................................................6 3.2 POSITION SETPOINT................................................................................................................6 3.3 MANUAL SETPOINT..................................................................................................................7 3.4 MONITOR OUTPUT SIGNAL.......................................................................................................7 3.5 VOLTAGE OUTPUT...................................................................................................................7 3.6 CURRENT OUTPUT...................................................................................................................8 3.7 DTC..........................................................................................................................................8 3.8 AUXILIARY INPUTS ...................................................................................................................8 3.9 POWER SUPPLY .....................................................................................................................9 3.10 CONNECTIONS LIST.................................................................................................................9
4 CALIBRATIONS AND COMMISSIONING............................................................................................10 4.1 NECESSARY TOOLS ..............................................................................................................10 4.2 CALIBRATION TOOL B98450 ...................................................................................................10 4.3 CALIBRATIONS IN THE LAB ....................................................................................................11
4.3.1 OSCILLATOR FREQUENCY/AMPLITUDE..............................................................................11 4.3.2 DEMODULATOR PHASE .....................................................................................................11 4.3.3 INPUT SIGNAL AMPLIFICATION...........................................................................................12 4.3.4 JUMPER SETTINGS ............................................................................................................12
4.3.4.1 JP1 .............................................................................................................................12 4.3.4.2 JP2 .............................................................................................................................12 4.3.4.3 JP3 .............................................................................................................................13 4.3.4.4 JP4 .............................................................................................................................13 4.3.4.5 JP5 .............................................................................................................................13
4.3.5 INTERNAL TEST POINTS .....................................................................................................13 4.4 CALIBRATIONS IN THE FIELD .................................................................................................14
4.4.1 CLOSED LOOP MODE ........................................................................................................14 4.4.2 OPEN LOOP MODE ............................................................................................................14 4.4.3 SAFETY MODE ...................................................................................................................14 4.4.4 SAFETY MODE AND SAFETY MODE SPEED ......................................................................15 4.4.5 PRELIMINARY STEPS.........................................................................................................16 4.4.6 POSITION TRANSDUCER OFFSET/SPAN.............................................................................16 4.4.7 MONITOR OUTPUT OFFSET/SPAN......................................................................................18 4.4.8 LOOP PHASING..................................................................................................................18 4.4.9 LOOP GAIN/OFFSET...........................................................................................................19 4.4.10 MEASURING THE SETPOINT VOLTAGE...........................................................................20 4.4.11 ABNORMAL SITUATIONS.................................................................................................21
5 TECHNICAL DATA............................................................................................................................22 5.1 ELECTRICAL SPECIFICATION.................................................................................................22 5.2 ENVIRONMENTAL SPECIFICATION.........................................................................................22 5.3 RELIABILITY ...........................................................................................................................22 5.4 COMPLIANCE.........................................................................................................................22

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 4/36
6 APPLICATIONS IN THE L143-RPC-XXX SYSTEMS............................................................................23 6.1 BASIC CONFIGURATION.........................................................................................................23
6.1.1 LVDT CONNECTION ............................................................................................................23 6.2 ACV CONFIGURATION............................................................................................................25
6.2.1 ADDITIONAL WIRING...........................................................................................................26 6.2.2 CONFIGURING THE L127-022 CARD.....................................................................................26
6.3 LCV CONFIGURATION ............................................................................................................27 6.3.1 ADDITIONAL WIRING...........................................................................................................27
6.4 TWIN TRANSDUCERS ACTUATORS ........................................................................................27 6.4.1 THE L127-021 SUBSYSTEM.................................................................................................28 6.4.2 CONNECTION OF THE SECOND LVDT.................................................................................28 6.4.3 CALIBRATION OF THE L127-021 SUBSYSTEM .....................................................................28
6.5 A FEW FINAL SUGGESTIONS.................................................................................................30 6.5.1 TRANSDUCER CALIBRATION AND GAIN OPTIMISATION ......................................................30 6.5.2 CHECKING THE FEEDBACK AGAINST THE SETPOINT.........................................................30 6.5.3 LIMITED STROKE................................................................................................................31 6.5.4 LVDTs OUT OF SPECIFICATIONS. .......................................................................................32 6.5.5 4-WIRE LVDTS....................................................................................................................33

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 5/36
1 FUNCTIONAL DESCRIPTION The L129-036 card is designed for position closed loop control. It features an LVDT position transducer conditioning circuit, a I/V converter for the input setpoint signal, a proportional servoamplifier, and a V/I converter for driving directly a MOOG servovalve. The card can be operated in closed loop mode, in open loop mode, and in safety mode, that causes the automatic return of the controlled actuator to a safe position. The card can also provide a signal proportional to the position of the controlled actuator, for acquisition or display by an external device (monitor output).
2 FRONT PANEL On the card’s front panel, the following items can be found.
2.1 MODE SWITCH This switch can be used to switch the card between closed loop (Automatic), and open loop (Manual) operating mode. The mode currently selected is indicated by the mode indicator (see next section).
2.2 MODE INDICATOR The mode indicator is a dual colour LED. When it emits RED light, the card is operating in open loop mode; when it emits GREEN light, the card is operating in closed loop mode.
2.3 SAFETY MODE INDICATOR The safety mode indicator is a RED LED. It tells if the card is working normally (either in closed loop mode or in open loop mode), or if it’s in safety mode. When the LED is ON, the card is working normally, when the LED is OFF, the card is in safety mode.
2.4 CALIBRATION TOOL CONNECTOR This is a 15 pins, high density, D shell female connector. It’s for the connection of the calibration tool B98450.
2.5 TRIMMERS FOR CALIBRATIONS IN THE FIELD Six holes in the front panel provide access to six trimmers, located behind the front panel. By means of a small, flat blade, screw driver, the operator can carry out all the calibrations of the card which are normally necessary during commissioning of the system (see below the section about calibrations).

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 6/36
3 CONNECTIONS This card can be operated stand-alone. However, it is designed for operation inside a MOOG rack, model L143-RPC-XXX. When installed in such a rack, connections are carried out by means of a 15 pins, D-shell male connector, and by means of a 7 contacts terminal block. Both these are located on the rear back-plane.
3.1 POSITION TRANSDUCER The position transducer to be used with the L129-036 is an LVDT. However, other types of transducers could be used too. The primary winding of the LVTD must be connected between pins 4 and 5 of the D-shell connector. The shield of this cable must be connected to pin 3 of the same connector. Polarity is unimportant. If the card is used stand-alone, the primary winding of the LVDT must be connected between pins 19ac and 20ac of the card’s edge connector. Shield must be connected to pins 20ac. The L129-036 is designed for operating LVDTs connected in “autotransformer” configurations, but can also be used for LVDTs connected in a different configuration. For informations about different configurations, please refer to chapter 6. Position transducer inputs are located on pins 1 and 2 of the 15 pins D-shell connector. Shield must be connected to pin 3 of the same connector. Polarity depends on loop phasing (see below). If the card is used stand-alone, position transducer inputs are at pins 16ac and 17ac of the edge connector.
3.2 POSITION SETPOINT Position setpoint is an electric signal representing the desired position of the controlled actuator. This signal is meaningful only if the card is operating in closed loop mode. The setpoint signal is a 4..20 mA signal. Current must enter the card from contact 1 of the terminal block. The same current will exit from terminal 2 of the same terminal block. Depending on loop phasing (see below) 4 mA will represent full stroke on one end and 20 mA will represent full stroke on the other end of the actuator. If the card is used stand-alone, current must enter the card from pins 2ac, and will exit from pins 1ac of the edge connector.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 7/36
3.3 MANUAL SETPOINT Manual setpoint is an electric signal representing the desired speed of the controlled actuator. This signal is meaningful only if the card is operating in open loop mode. This signal is normally generated by the calibration tool, B98450, but can also be supplied externally, only if the card is used stand-alone. The manual setpoint is a -10Vdc..+10Vdc signal. +10Vdc represents full speed in one direction, -10Vdc represents full speed in the opposite direction. This signal must be applied between pins 9ac and 18ac of the edge connector.
3.4 MONITOR OUTPUT SIGNAL The monitor output signal is a 0Vdc..+10Vdc signal, proportional to the real actuator position. It is intended for acquisition by an external apparatus (such as a computer or a display unit). This signal is output between terminals 4 (+) and 5 (-) of the seven contacts terminal block. Shield must be connected to terminal 3 of the same terminal block. If the card is used stand-alone, the same signal can be sampled between pins 4ac (+) and 5ac (-) of the edge connector.
3.5 VOLTAGE OUTPUT This output voltage represents the desired speed of the controlled actuator. It’s to be fed either to a MOOG servovalve with voltage input, or to the speed reference input of an electric motor’s drive system. When the card is operating in open loop mode, this signal is a (negated) replication of the manual setpoint signal. When the card is operating in closed loop mode, this signal is proportional to the actuator’s position error (i.e. the difference between the desired position and the real position). The signal range is –10Vdc..+10Vdc. –10Vdc represents full speed of the actuator in one direction, while +10Vdc represents full speed in the opposite direction. This output signal (single ended) is available only if the card is used stand-alone: the output voltage is available on pins 21ac of the edge connector. The reference point (0Vdc) is available on pins 22ac of the same connector.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 8/36
3.6 CURRENT OUTPUT This output signal derives from the Voltage to Current conversion of the Voltage output signal (see above). It’s intended to drive directly a MOOG servovalve with current input. Please, note that, whatever the load of this output is, it must not have a voltage reference to the 0V point of the card (i.e. it must be floating respect to pins 22ac or 18ac of the edge connector). The output current range is –8mA..+8mA. –8mA represents full speed of the actuator in one direction, while +8mA represents full speed of the actuator in the opposite direction. This output signal is available between pins 6 and 7 of the 15 pins D-shell connector. Polarity depends on loop phasing (see below). Shield must be connected to pin 8 of the same connector. If the card is used stand-alone, this output signal is available between pins 25ac and 26ac of the edge connector.
3.7 DTC This is an enabling signal (Device Trip Command). It’s used to switch the card between working modes (open loop mode and closed loop mode) and the safety mode. If this signal is true, output voltage and current can drive the actuator. If the signal is false, a fixed voltage and/or current is output, to drive the actuator to the safety position. This signal is made true by connecting together, with a voltage free contact, terminals 6 and 7 of the seven contacts terminal block. The signal is made false by leaving these terminals unconnected. Please, note that this input signal has no effect (i.e. it’s bypassed) if the calibration tool B98450 is connected to the card, and the front switch is in the «open loop» position.
3.8 AUXILIARY INPUTS A couple of inputs are available on the card’s edge connector, for transducers other than LVDTs. If such transducers are used, the LVDT input must be disconnected from the servo-amplifier input, by means of jumpers, as explained in a later section (jumper settings). Two auxiliary inputs are available. They are both differential inputs. The first one is between pins 23c and 23a of the card’s edge connector. The second one is between pins 15c and 15a of the same connector.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 9/36
3.9 POWER SUPPLY The L129-036 card is powered by a power supply installed in each L143-RPC-XXX rack. However, when the card is used stand-alone, it must be powered by a D.C. power source, as follows: Pin 29ac +15Vdc, 100mA. Pin 31ac -15Vdc, 100mA. Pin 22ac 0Vdc Pin 24ac 0Vdc Of course, these pin numbers refer to the card’s edge connector.
3.10 CONNECTIONS LIST A complete list of the card’s connections follows. Where relevant, connection pins to the L143-RPC-XXX system connectors are shown too. L129-036 TBI JFI Function 1ac 2 Setpoint input – (current out) 2ac 1 Setpoint input + (current in) 3ac Reserved, do not connect 4ac 4 Monitor output + 5ac 5 Monitor output – 6ac Error output (same as TPE of calibration tool) 7ac 6 DTC + 8ac 7 DTC – 9ac Open loop input (same as “Signal” of calibration tool) 10ac 13 Exc2 – 11ac 12 Exc2 + 12ac 3 11 Shield (0V) 13ac 10 In2 – 14ac 9 In2 + 15a Auxiliary input 2 – 15c Auxiliary input 2 + 16ac 1 In1 + 17ac 2 In1 – 18ac 3 Shield (0V) 19ac 4 Exc1 + 20ac 5 Exc1 – 21ac Voltage servovalve output 22ac 8 Shield (0Vdc power supply) 23a Auxiliary input 1 – 23c Auxiliary input 1 + 24ac Reserved, do not connect 25ac 6 Servovalve output + 26ac 7 Servovalve output – 27ac Reserved, do not connect 28ac Reserved, do not connect 29ac +15Vdc power supply 30ac no connection 31ac -15Vdc power supply 32ac no connection

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 10/36
4 CALIBRATIONS AND COMMISSIONING L129-036 cards are carefully calibrated on the bench in MOOG’s laboratories. MOOG advises against changing calibration values. However, further calibrations or re-calibrations in the filed may be necessary, for a number of different reasons that users keep finding. Some of the possible calibrations of the L129-036 cards can be done in the field. For all these calibrations, access to the relevant trimmers is provided, trough holes in the front panel. All the other calibrations must be done in a lab, only by highly skilled and trained staff.
4.1 NECESSARY TOOLS Depending on the calibration type, you’ll need a different set of tools. For all the calibrations, you’ll definitely need the calibration tool B98450, from MOOG. This is described in the following section. Also, you’ll need a voltmeter. Prefer digital types (called DVM, Digital Voltage Meter), as they normally have higher accuracy. DVM resolution is not an issue: 3 digits or 3 ½ digits types are normally good enough. For calibrations to be carried out in the lab, you’ll need all the above tools, plus a dual channel oscilloscope (with or without storage, with analog or digital display, bandwidth is not an issue), plus a frequency meter (some digital oscilloscope provide frequency measurement too: if you have one providing such a feature, you don’t need the latter tool).
4.2 CALIBRATION TOOL B98450 This tool is supplied by MOOG. It’s made by a box, equipped with a cable for connection to the card to be calibrated. On it’s front panel, there is a potentiometer’s knob, and a number of test points. The knob is for changing the manual setpoint to the card. When in the central position, the setpoint is 0V, and, consequently, the actuator is steady. Rotating the knob, either clockwise or counterclockwise, will cause the actuator to move in either direction, with a speed proportional to the knob displacement from the central position. The manual setpoint, generated inside the calibration tool, can be measured on the test point just above the knob. This test point is marked «signal». On the left side of the «signal» test point, there is a test point marked «0V». This is the reference point (i.e. the one to which the «common» probe of your DVM must be connected) for all the measurements that can be achieved with the calibration tool. The function of the other test points will be explained in the next sections, where relevant.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 11/36
4.3 CALIBRATIONS IN THE LAB LVDT manufacturers always specify the range of frequency and amplitude of the excitation voltage for which the transducer provides best performance. The L129-036 card is calibrated for providing an excitation signal of 7 Vrms at a frequency of 3 kHz. If the LVDT you are using does not provide best performance with this excitation signal, you need to modify it. Also, the coupling between primary winding and secondary windings, may differ from one LVDT model to another, either in amplitude or phase, or both. In this case, you need to modify either the amplification of the transducer signal or the phase of the synchronous demodulator sampling pulse, or both. These calibrations are better performed in a lab. If you perform these calibrations in the filed, make sure that there is no power applied to the actuator. To perform these calibrations, you need to install an extension card (testadapter) between the L129-036 and the backplane.
4.3.1 OSCILLATOR FREQUENCY/AMPLITUDE Proceed as follows: • Connect the LVDT to the backplane. • Connect the oscilloscope probe to TP1E of the calibration tool. • Power up the card. • Rotate RV15 clockwise to increase the frequency, or counterclockwise to decrease the
frequency. The frequency range is 2..8 kHz. • Rotate RV18 clockwise to increase the amplitude, or counterclockwise to reduce it. The
amplitude range is 5..24 Vpp. Once you are happy, you can proceed with the following calibration.
4.3.2 DEMODULATOR PHASE Proceed as follows: • Connect the LVDT to the backplane. • Connect one probe of your oscilloscope to TP1I on the calibration tool, and the other probe to
TP1S. • Power up the card. • While looking at the oscilloscope trace (you’ll see a sinusoidal signal, at the same frequency of
the excitation signal), move the LVDT nucleus to one end, and find the position for which the signal amplitude is maximum. Leave the nucleus fixed in this position.
• The second trace on the oscilloscope will show a pulse, occurring at the same frequency of the sinusoidal input signal. You must move this pulse, by rotating RV16, until the pulse occurs just when the sinusoidal input signal reaches its positive peak value.
Once you are happy, you can proceed with the following calibration.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 12/36
4.3.3 INPUT SIGNAL AMPLIFICATION Proceed as follows: • Connect the LVDT to the backplane. • Connect the oscilloscope probe to TP1I of the calibration tool. • Power up the card. • While looking at the oscilloscope trace (you’ll see a sinusoidal signal, at the same frequency of
the excitation signal), move the LVDT nucleus to one end, and find the position for which the signal amplitude is minimum. Leave the nucleus fixed in this position.
• Move the oscilloscope probe to TP1D on the calibration tool (or connect here the second oscilloscope probe). Look at this track.
• Rotate RV14, until you read 0Vdc on TP1D. Rotating RV14 clockwise will reduce the voltage at TP1D.
• Move the LVDT nucleus to other end; in this position the signal amplitude should be maximum. Leave the nucleus fixed in this position.
• Rotate RV13 (clockwise to increase amplification, i.e. to make the voltage more negative), until the voltage on TP1D is about –10Vdc. Do not continue rotating the trimmer, after this condition has been reached, or the input stage will go into saturation, and the input signal will be unacceptably distorted. If this happens, the position signal linearity will be degraded. It’s better to leave the amplification factor a bit lower, obtaining on TP1D a voltage about -9.5Vdc.
• Now move the LVDT nucleus to the other end, and verify that the voltage you obtain on TP1D is still about 0 Vdc, or slightly negative. If this is not the case, you need to calibrate RV14, until this condition is met.
• You probably need to repeat the last four steps, untill you get a voltage on TP1D in the range 0 Vdc to –10Vdc when you move the actuator from one end of the stroke to the other.
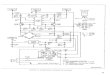
4.3.4 JUMPER SETTINGS A number of jumpers are available on the L129-036 card, that allow you to configure it to your needs. For a better understanding of jumpers description, please refer to the card’s block diagram, at the end of this document.
4.3.4.1 JP1 JP1 allows you to select the polarity of the feedback signal from the first transducer. • Position A-B: normal polarity for the feedback signal (factory setting). • Position A-C: inverted polarity for the feedback signal.
4.3.4.2 JP2 JP2 allows you to select the polarity of the feedback signal from the second transducer, if applicable. • Position A-B: normal polarity for the feedback signal (factory setting). • Position A-C: inverted polarity for the feedback signal.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 13/36
4.3.4.3 JP3 JP3 allows you to select the source of the second transducer, if applicable. The second transducer can be either an LVDT or a 0..10Vdc signal derived from the conditioning circuit for a different transducer. • Position A-B: The second transducer is not applicable (factory setting). • Position A-C: The second transducer is the second LVDT (The L127-021 subsystem must be
installed in this case; see below). • Position A-D: The second transducer feedback signal is applied to Auxiliary input 2.
4.3.4.4 JP4 JP4 allows you to select the source of the first transducer. The first transducer can be either an LVDT or a 0..10Vdc signal derived from the conditioning circuit for a different transducer. • Position A-B: The first transducer feedback signal is applied to Auxiliary input 1. • Position A-C: The first transducer is the first LVDT (factory setting).
4.3.4.5 JP5 Jumper JP5 is a two positions jumper, and it’s installed in place of RV19. JP5 allows you to select the actuator’s movement direction when operating in safety mode (see below the definition of safety mode operation).The following options are available: • Upper position: Safety movement in one direction. The direction actually depends on the
hydraulic connections of the servovalve, and must be found experimentally. • Lower position: Safety movement in the opposite direction. • Jumper unconnected: Actuator is steady when operating in safety mode.
4.3.5 INTERNAL TEST POINTS The following test points are available on the card: • GND. This is the reference point for all test point voltages. • TIN. The voltage at this test point is the 4..20 mA position setpoint signal converted to the range
0..10Vdc. • MONITOR. This is the same voltage at pins 4ac of the card’s edge connector. • - 15V. This is the negative supply voltage. • + 15V. This is the positive supply voltage. • - 10V. This is the negative internal reference voltage. • + 10V. This is the positive internal reference voltage.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 14/36
4.4 CALIBRATIONS IN THE FIELD A number of small adjustment are usually necessary to make the L129-036 card work correctly in the field. This section describes a step-by-step procedure to carry out all the necessary calibrations. These calibrations can be performed without removing the L129-036 card from it’s working position. Normally, these calibrations require to move the actuator manually, and thus it’s required to switch the L129-036 card between its operating modes. The L129-036 card can operate in three different modes: open loop mode, closed loop mode and safety mode. The chosen operating mode, at any time, is revealed by the colour and status of the LEDs on the front panel (see above).
4.4.1 CLOSED LOOP MODE Closed loop mode (or Automatic) is the normal operating mode. When the card is operating in this mode, it measures the real position of the actuator, compares this measure with the desired position (i.e. computes the position error), and drives the actuator in such a way to null the position error. The card is in closed loop mode if the calibration tool is NOT connected to the card, OR the switch on the front panel is in the «Automatic» position AND the DTC enabling signal is TRUE.
4.4.2 OPEN LOOP MODE Open loop mode (or Manual) is an operating mode helpful for moving the actuator manually to the desired position; this is often necessary to perform some calibrations. When the card is operating in this mode, the speed of the actuator is proportional to the manual setpoint (see above). The card is in open loop mode if: the calibration tool is connected to the card AND the switch on the front panel is in the «manual» position. Please, note that when the card is in open loop mode, the DTC signal is meaningless, as it is bypassed internally.
4.4.3 SAFETY MODE Safety mode is the operating mode that causes the actuator to move to the safety position, or to block it where it is. The card is in safety mode if the calibration tool is NOT connected to the card, OR the switch on the front panel is in the «Automatic» position AND the DTC enabling signal is FALSE.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 15/36
4.4.4 SAFETY MODE AND SAFETY MODE SPEED The very first calibration necessary when commissioning an L129-036 card, is the one for setting the speed and direction of the actuator’s movement to the safety position. The adjustment of the safety mode speed depends on the card’s configuration. Two possibilities exist: • The card is fitted with a trimmer for adjusting safety mode operation. • The card is fitted with a jumper for adjusting safety mode operation. In the first case, trimmer RV19 allows to adjust both speed and direction of the movement of the actuator to the safety position. The card is shipped with the viper of RV19 set to the center position. With such a setting, the actuator will not move when safety mode is entered. To adjust RV19, perform the following steps: • Remove the card from its location. • Fit an extension card in its place. • Fit the L129-036 card onto the extension card. • Switch power on to the card. • Apply power to the controlled actuator. If it’s an hydraulic actuator, supply a low pressure. If it’s
an electric actuator, limit its current to a safe value. • With the help of a screw driver, rotate RV19 in either direction, until the actuator moves to the
safety position with a satisfactory speed. • Power OFF, remove the extension card, and fit the L129-036 card back in it’s location. You might wish to re-do this calibration later, when the actuator if fully operating. In the second case, you can only choose the safety mode movement’s direction. A jumper is fitted in place of RV19. By choosing among the two possible jumper’s positions, you choose the movement direction. Movement speed is fixed. If you leave the jumper unconnected, the actuator will remain in the position in which it is when safety mode is entered. Warning: Please, note that leaving the jumper unconnected is safe only if the actuator is driven by an hydraulic servovalve with current input. It the actuator is driven by an hydraulic servovalve with voltage input, or by an electric drive system and motor, leaving the jumper unconnected is not an available option, as the servovalve or drive system input is left floating. To choose the right setting for this jumper, proceed as follows: • Remove the card from its location. • Fit an extension card in its place. • Fit the L129-036 card onto the extension card. • Fit the jumper in one position. • Switch power on to the card. • Apply power to the controlled actuator. If it’s an hydraulic actuator, supply a low pressure. If it’s
an electric actuator, limit its current to a safe value. • If the actuator moves in the right direction, you’ve finished. • If the actuator moves in the wrong direction, switch power OFF, move the jumper to the other
position, and switch the power ON again: now the actuator should move in the right direction. • Power OFF, remove the extension card, and fit the L129-036 card back in it’s location. In either case, let the actuator reach the safety position before power OFF.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 16/36
4.4.5 PRELIMINARY STEPS Before beginning the calibration operations, make sure that: • From the position in which you are you can see the actuator. If you can’t see the actuator, you
might realize that something wrong, or even dangerous, is happening, too late ! • The manual setpoint is close to 0Vdc. You can measure this setpoint voltage on the test points
on the calibration tool. If the manual setpoint is not close to 0Vdc, rotate the knob in either direction, until you reach that condition. If you fail in achieving this, the actuator may suddenly move with high speed when you switch to open loop mode.
• Reduce the actuator’s power as much as possible: this is to prevent damages in case something goes wrong. If the actuator is an electric motor, reduce the maximum current (i.e. the torque) to the motor. If the actuator is an hydraulic cylinder, reduce the hydraulic circuit pressure to the minimum. Some servovalves have a minimum working pressure. Find out how much it is, looking at the servovalve’s data-sheet. Then set the hydraulic circuit pressure just above this minimum pressure; do not exceed this value by more than 10%.
• Make sure that the DTC signal is false, so that, if the card is inadvertently switched to closed loop mode, the actuator moves to the safety position. This is strictly necessary until the loop phasing step has been completed.
Once you are sure about ALL of the above, you can start the calibration operations. Start with the following steps: • Connect the calibration tool to the card (if not yet done). • Move the switch on the card’s front panel to the «Manual» position. Now you are able to move the actuator, forward and backward, with the desired speed. By rotating clockwise the knob on the calibration tool you can make the actuator move in one direction. By rotating counterclockwise the same knob, the actuator moves in the opposite direction. The movement speed is proportional to the knob displacement from the center position. The actuator movement can be stopped by rotating the knob to the central position (manual setpoint = 0Vdc).
4.4.6 POSITION TRANSDUCER OFFSET/SPAN Position transducers are always chosen longer than the distance they must measure. By so doing, the transducer can be fitted in such a way that it never reaches “full stroke” positions during operation, and, because of this, it’s less subject to failures due to bumping phenomena. Also, LVDTs have a better linearity when used in the middle portion of their operating range. Unfortunately, when not using a transducer for it’s entire stroke, it’s output cannot span the full output capability (for example, 0Vdc..+10Vdc). Because of this, often the need arise to amplify and offset the transducer output signal, so that the resulting voltage spans exactly the 0Vdc..+10Vdc voltage range for the full actuator’s stroke.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 17/36
The L129-036 card provides this capability. When you perform this calibration, keep in mind the following concepts: • A setpoint input current of 4 mA. is converted to a 0Vdc voltage at the error summation point. • A setpoint input current of 20 mA. is converted to a –10Vdc voltage at the error summation
point. • The actuator is steady when the error signal is 0Vdc. So, if your setpoint input current is 20 mA,
and the setpoint voltage at the summation point is –10Vdc, your actuator will be steady at a point where the transducer voltage (measured at TPP1) is +10Vdc.
• Similarly, if your setpoint input current is 4 mA., and the setpoint voltage is 0Vdc, your actuator will be steady at a point where the transducer voltage (measured at TPP1) is 0Vdc.
• The safety position is the position to which the actuator moves in case of some failure; one of the possible failures, is the breaking of the wire carrying the setpoint signal: in such a case the setpoint current is 0 mA, and the actuator moves to a position corresponding to the lowest possible setpoint current (i.e. 4 mA). From this derives that the safety position corresponds to the position for which the input setpoint current is 4 mA. In such a position, as explained above, the position transducer must supply a voltage equal to 0Vdc.
To perform this calibration, you must: • Switch the card to open loop operating mode, by moving the switch on the front panel to the “M”
position. The A/M LED will emit red light, and the ON LED will emit red light too. • Connect your DVM’s probe to test point TP1I of the calibration tool. Set the DVM for measuring
AC voltage. • By rotating the knob on the calibration tool, move the actuator to the point in which the voltage
you read is minimum. • Connect your DVM’s probe to test point TPP1 of the calibration tool.Set the DVM for reading DC
voltage. • If jumper JP1 is in position A-B, rotate RV7 (TRANSD. OFFSET), on the front panel, until you
read 0Vdc on your DVM. Rotating the trimmer clockwise will decrease the voltage you read. If jumper JP1 is in position A-C, rotate RV7 untill you read +10Vdc. Rotating this trimmer clockwise will increase the voltage you read.
• Connect your DVM’s probe to test point TP1I of the calibration tool. Set the DVM for measuring AC voltage.
• By rotating the knob on the calibration tool, move the actuator to the point in which the voltage you read is maximum.
• Connect your DVM’s probe to test point TPP1 of the calibration tool.Set the DVM for reading DC voltage.
• If jumper JP1 is in position A-B, rotate RV8 (TRANSD. SPAN), on the front panel, until you read +10Vdc on your DVM. Rotating the trimmer clockwise will increase this voltage. If jumper JP1 is in position A-C, rotate RV8 untill you read 0Vdc. Rotating this trimmer clockwise will decrease the voltage you read.
• Repeat the last eight steps, again and again, until you read exactly 0Vdc and +10Vdc at the two extremes of the actuator’s stroke.
• When you’re happy with the calibration, move the actuator to the safety position. It might happen that the above calibration cannot be performed, because the transducer voltage is high when the actuator is in the safety position, and is close to 0Vdc when the actuator is in the opposite position. In such a case, you must reverse the transducer polarity. This is easily achieved by moving jumper JP1 from position A-B to position A-C. Then proceed as described above.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 18/36
4.4.7 MONITOR OUTPUT OFFSET/SPAN The L129-036 card provides an output voltage (Monitor output signal) proportional to the voltage from the position transducer. As mentioned above, this voltage ranges 0Vdc..+10Vdc. MOOG calibrates the card in such a way that the monitor output signal is a clone of the transducer voltage (the one you can measure on TPP). If, for any reason, you need to change the span and/or the offset of this output signal, you can do that by changing the calibration of RV3 (MONITOR OFFSET) and RV4 (MONITOR GAIN) on the card’s front panel. To perform this calibration, you must: • Connect your DVM’s probe to the monitor output signal connection. • Switch the card to open loop operating mode, by moving the switch on the front panel to the “M”
position. The A/M LED will emit red light, and the ON LED will emit red light too. • By rotating the knob on the calibration tool, move the actuator to the point in which your position
transducer voltage should be 0Vdc (i.e. to the safety position). • Rotate RV3 (MONITOR OFFSET), on the front panel, until you read 0Vdc on your DVM.
Rotating the trimmer clockwise will increase the voltage you read. • By rotating the knob on the calibration tool, move the actuator to the point in which your position
transducer voltage should be +10Vdc. • Rotate RV4 (MONITOR GAIN), on the front panel, until you read +10Vdc on your DVM. Rotating
the trimmer clockwise will increase this voltage. • Repeat the last four steps, again and again, until you read exactly 0Vdc and +10Vdc at the two
extremes of the actuator’s stroke. • When you’re happy with the calibration, move the actuator to the safety position.
4.4.8 LOOP PHASING Loop phasing is a procedure to get the control loop «in phase». The control loop is «in phase» when the actuator’s movement, caused by a position error, is such that the position error (i.e. the difference between the desired position and the real position) is reduced. The control loop is «out of phase» when the actuator’s movement, caused by a position error, is such that the position error (i.e. the difference between the desired position and the real position) is increased. Obviously, if the loop is out of phase, the system is unstable: a small position error will cause an uncontrolled movement of the actuator, with a rising speed, in the wrong direction. To get the control loop «in phase» perform the following steps: • Connect your DVM to the TPE test point of the calibration tool. • Switch the card to open loop operating mode, by moving the switch on the front panel to the “M”
position. The A/M LED will emit red light, and the ON LED will emit red light too. • Feed the card with a 4 mA setpoint signal: this means that actuator’s desired position is the
safety position. By rotating the knob on the calibration tool, move the actuator to the safety position. When the actuator reaches the safety position, the voltage reading on TPE should be about 0Vdc.
• Keep feeding the card with a 4 mA setpoint, and, by rotating the knob on the calibration tool, move the actuator to the opposite position; TPE voltage should be about –10Vdc.
• Now feed a 20 mA setpoint, and leave the actuator in the same position; TPE voltage should be about 0Vdc.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 19/36
• Keep feeding a 20 mA setpoint, and by rotating the knob on the calibration tool, move the actuator to the safety position. When the actuator reaches the safety position, TPE voltage should be about +10Vdc.
• Now move your DVM’s probe to the TPV test point on the calibration tool. • Gently move the actuator forward and backward, by rotating the knob on the calibration tool. • While the actuator is moving forward (i.e. far away from the safety position), read the voltage on
the DVM: this voltage should be positive. If it’s negative, the loop is “out of phase”. • While the actuator is moving backward (i.e. toward safety position), read the voltage on the
DVM: this voltage should be negative. If it’s positive the loop is “out of phase”. • If your loop is «out of phase», to bring it «in phase» you must reverse the polarity of the Voltage
output (or Current output) connection. After reversing this signal polarity, repeat the above tests, until you are sure that the actuator moves to the safety position when voltage on TPV is negative, and moves to the opposite position when the voltage on TPV is positive. Please, note that after this reversal, for the same rotation of the knob on the calibration tool, the actuator movement will result in the opposite direction, compared with the one before the reversal.
• After the completion of the loop phasing step, move the actuator to the safety position. The loop phasing procedure is now complete, and you can use the card in closed loop mode (i.e. you can also activate the DTC signal).
4.4.9 LOOP GAIN/OFFSET Loop gain and offset affect position accuracy and control loop stability. The servoamplifier gain and offset must be calibrated when the card is operating in closed loop mode. Because of this, this is the very last calibration performed on the control card. To perform this calibration, the use of an oscilloscope is recommended, even if in some cases a DVM may suffice. In any case, your instrument’s probe must be connected to either TPP or TPE on the calibration tool. If you connect the probe to TPP, you will look at the actuator’s position signal, if you connect the probe to TPE, you will look at the actuator’s position error signal. If you are using an oscilloscope, it’s better to connect two probes, to both test points. The main goal of this calibration is to adjust the servoamplifier to get the best system response (good speed, good positioning accuracy), in absence of instability (i.e. without actuator’s oscillations, and without excessive overshoots or ringing around the target position). You must exercise your system, by making the position setpoint «step» continuously between two values. The change in the setpoint signal must be as fast as possible, to simulate a theoretical «step». The steps frequency must be such that the actuator has time enough to «settle» in the target position. You must observe how fast the actuator reaches its target position: when the actuator stops, the voltage on TPP keeps constant, and the voltage on TPE keeps constant too, at a value close to 0Vdc. To improve your system response (i.e. to increase the servoamplifier’s gain), gently rotate clockwise trimmer RV6 (LOOP GAIN) on the card’s front panel. If you can observe overshoots in the position signal (the position error signal, in this case, changes polarity), your system is close to instability. You might want to reduce the gain, in such a case. If you increase the gain too much, you may incur in instability. Instability manifests itself with vibrations around the setpoint position. In such a case, you need to reduce the gain quickly, by rotating RV6 (LOOP GAIN) counterclockwise. Alternatively, you might want to stop the system altogether. To do this, just switch to FALSE the DTC signal.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 20/36
Trimmer RV5 (LOOP OFFSET) on the card’s front panel is to adjust the servoamplifier offset. You might try to adjust it to get a better positioning accuracy, or just to compensate electrically a servovalve offset. If your actuator is always subject to a constant force (such as gravity) offset calibration may help in compensating such a force. The calibration must be done with the actuator in a position for which you know exactly the voltage that the position transducer should output. Move the actuator, in closed loop mode, to such position. Measure the voltage on TPP. If it’s not the voltage you would expect, try rotating RV5 (LOOP OFFSET), until you read the expected voltage.
4.4.10 MEASURING THE SETPOINT VOLTAGE The conversion of the setpoint input current to setpoint voltage is carefully calibrated in MOOG’s laboratory. So, if you know the setpoint input current, by calculation you know also the setpoint voltage. It’s given by the following formula: Vs = - 0.625 * (Is – 4) Where Is is the setpoint current in mA., and Vs is the setpoint voltage in Volts. Because of this, there is no test point for the setpoint voltage on the calibration tool. However, you may wish, for any reason, measure this voltage. The only way to do this, is to: • Switch OFF the card. • Extract it from its location. • Plug an extension card in its place. • Plug the card onto the extension card. • Switch the system back ON • Measure the voltage between test point TIN and test point GND.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 21/36
4.4.11 ABNORMAL SITUATIONS An abnormal situation is entered if you disconnect the calibration tool while the switch on the card’s front panel is in the open loop mode (or Manual) position. This situation can be detected by looking at the LEDs on the front panel: if the Mode indicator LED emits red light, the abnormal situation holds. What’s happening? The card is operating in closed loop mode, but is ready to switch to open loop mode. This will happen suddenly as soon as the calibration tool is connected. Now, if someone connects the calibration tool, and the knob is not in the central position (i.e. the manual setpoint is not 0Vdc), the actuator will suddenly start moving in some unknown manner, against everybody’s wish. This is a potentially dangerous situation, and should be avoided. The rule for avoiding this situation is: always move the mode switch to the closed loop mode position BEFORE disconnecting the calibration tool. If this abnormal situation is inadvertently entered, to return to a normal situation, just move the mode switch to the closed loop (Automatic) mode position immediately.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 22/36
5 TECHNICAL DATA
5.1 ELECTRICAL SPECIFICATION Power supply +/- 15 Vdc max 150mA Setpoint input signal 4..20 mA dc Setpoint input impedance 50 Ohm Monitor output signal 0..10 Vdc, max 3 mA LVDT Excitation voltage 6..24 Vpp (2..9 Vrms) LVDT Excitation current max 50 mArms LVDT Excitation frequency 2..9 kHz Valve output current -8..+8 mAdc Valve output current in safety mode +/- 2 mAdc Device Trip Command Clean contact (closed to run)
5.2 ENVIRONMENTAL SPECIFICATION Operating Temperature 0..+50 Deg.C Storage Temperature -20..+80 Deg C Relative Humidity Max 90% non condensing
5.3 RELIABILITY Mean Time Between Failures 1.140.000 h
5.4 COMPLIANCE Safety: EN 60204-1 Emission: EN 50081-2 Immunity: EN 50082-2

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 23/36
6 APPLICATIONS IN THE L143-RPC-XXX SYSTEMS The L143-RPC-XXX series of systems are dedicated to turbine controls. These systems are housed in a 19” rack, 3 HE high and 48 TE wide. The rack is divided in 14 slots, and each slot is dedicated to host the control card for a particular function, as follows: Slot Function 1 GCV 2 SRV 3 NCV 4 IGV 5 TFV 6 ACV 7 LCV 8 Unused, for future expansion 9 Power supply 10 Unused, for future expansion 11 Unused, for future expansion 12 RVDT converter 13 Pick-up 1 converter 14 Pick-up 2 converter Slots 1 to 8 are equipped with a backplane printed circuit board, carrying the necessary connectors for setpoint signal, monitor output, DTC, LVDT and servovalve. Whenever a function requires additional circuits and cards, the required cards are fitted into slots 12 to 14, and these cards are wired to the backplane as necessary.
6.1 BASIC CONFIGURATION The L129-036 card is used in the basic configuration when controlling the following functions: GCV, SRV, NCV, IGV, and TFV. The jumpers setting for this configuration is as follows: JP1 a-b, JP2 a-b, JP3 a-b, JP4 a-c. Connections to the field are carried out through the backplane connectors (TBI & JFI), and there is no need for auxiliary electronic cards, nor for additional wirings.
6.1.1 LVDT CONNECTION When the L129-036 card is configured for controlling the above functions, it is configured for reading the position feedback from an LVDT transducer. LVDTs normally used in these applications are made by Kavlico. These LVDTs have two windings: a primary winding, equipped with a tap, and a secondary winding. The tap on the primary winding is such that the output voltage at the tap is 0.3 times the voltage applied to the primary winding. The nominal excitation voltage applied to the LVDT’s primary winding is 7 Vrms at 3 kHz. With such an excitation voltage, the output voltage at the tap is equal to 2.1 Vrms. The output voltage from the secondary winding ranges from –0.2 to +0.2 times the voltage applied to the primary winding, depending on the nucleus position (i.e. it ranges from –1.4 Vrms to +1.4 Vrms when the nominal excitation voltage is applied to the primary winding). By adding the

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 24/36
secondary output voltage to the output voltage from the tap in the primary winding, a total output voltage ranging from +0.7 Vrms to +3.5 Vrms can be obtained. This kind of connection of the LVDT is called “auto-transformer connection”; the L129-036 card is designed to manage LVDTs connected this way. Kavlico LVDTs have standardized wiring colors, as follows: • RED. Live wire for the primary winding. • BLACK. Neutral wire for the primary winding. • ORANGE . Primary winding tap. • YELLOW. One extreme of the secondary winding. • BLUE. The other extreme of the secondary winding. The voltage on the orange wire is 0.3 times the excitation voltage applied to the red wire (black wire is common), and is in phase with it. The L129-036 card uses a synchronous demodulator technique to detect output voltage from the LVDT transducer. Such a demodulator will work properly only if the output voltage from the LVDT is in phase with the excitation voltage. This means that the voltage applied to the In+ pin (pin 1 of JFI) must be positive referred to the In- pin (pin 2 of JFI) when the Vexc+ output (pin 4 of JFI) is positive referred to Vexc- output (pin 5 of JFI). When this condition is fulfilled, the voltage measured on TP1D of the calibration tool is always negative, regardless of the transducer nucleus position (this is true only with the standard calibrations of RV13 and RV14). If you measure a positive voltage on TP1D, check the LVDT connection with the proper connection lists shown just below. Typical connections of this kind of LVDT to the L143-RPC-XXX system are described here below: Configuration 1 JFI pin Signal LVDT wire 1 In+ Orange 2 In- Blue 4 Vexc+ Red 5 Vexc Black & Yellow Configuration 2 JFI pin Signal LVDT wire 1 In+ Orange 2 In- Yellow 4 Vexc+ Red 5 Vexc- Black & Blue Other possible configurations are: Configuration 3 JFI pin Signal LVDT wire 1 In+ Blue 2 In- Black 4 Vexc+ Red 5 Vexc- Black Orange & Yellow Configuration 4 JFI pin Signal LVDT wire 1 In+ Yellow 2 In- Black 4 Vexc+ Red 5 Vexc- Black Orange & Blue

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 25/36
In configuration 3 & 4, the black wire must be connected to both pin 2 and pin 5 of JFI and the orange wire must be linked with either the yellow wire or the blue wire of the LVDT. The “duplication” of the black wire and the links of the orange wire with the yellow wire or the blue wire must be done in the junction box. Configuration 1 is equivalent to configuration 3. Configuration 2 is equivalent to configuration 4. The difference between configuration 1-3 and configurations 2-4 is the output voltage when the LVDT nucleus is at one end of the stroke: with configurations 1-3 the output voltage is maximum, while with configurations 2-4 the output voltage is minimum, or viceversa. As mentioned in a previous section, when the actuator is in the safety position the voltage output from the Monitor output is about 0Vdc. If, because of the way the LVDT is mounted, you get about 10Vdc at the monitor output when the actuator is in the safety position (and, of course, you get 0Vdc when the actuator is in the opposite position), you need to reverse the polarity of the voltage from your LVDT. To do this, you have two options: • Connect the LVDT with a different wiring configuration. • Use the 10V complement circuit inside the L129-036 card. Both options are quite easy. In case you decide for the first option, simply choose among one of the configurations listed above: if you connected the LVDT using wiring configuration 1, switch to configuration 2, and viceversa; if you connected the LVDT using wring configuration 3, switch to configuration 4, and viceversa. In all cases, you need to swap the connection of the yellow and blue wire; the other wires remain connected as they were. In case you decide for the second option, you just need to move jumper JP1 on the L129-036 card. Move it between positions a-b and a-c untill you achieve the desired result.
6.2 ACV CONFIGURATION When the L129-036 card is fitted into slot 6, it must be configured for ACV control. Please, note that when the ACV control is necessary, the L143-RPC-XXX system must have slot 12 fitted with one L127-022 card (4..20 mA to 0..10Vdc converter). Of course, additional wiring is necessary too. The setting of the jumpers of the L129-036 card for this configuration is as follows: JP1 a-b, JP2 a-b, JP3 a-b, JP4 a-b. This jumper configuration must be used if the RVDT output is equal to 4 mA when the actuator is in the safety position. But, if the RVDT output is equal to 20 mA when the actuator is in the safety position, set JP1 a-c instead. When the L129-036 card is used in this configurations, trimmers RV7 (transducer offset) and RV8 (transducer span) on the front panel loose their functionality. To calibrate the transducer offset and transducer span, use the two trimmers located on the front panel of the L127-022 card instead.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 26/36
6.2.1 ADDITIONAL WIRING The 4..20 mA signal coming from the RVDT conditioning circuit is connected to pins 9 (+) and 10 (-) of the JFI connector. These pins are connected to pins 14ac and 13ac of the L129-036 card edge connector, respectively. The additional wiring implements the following connections: L129-036 L127-022 13ac 7ac 14ac 5ac 23a 11ac 23c 9ac In other words, the 4..20 mA input signal is feeded to pins 5ac (+) and 7ac (-) of the L127-022 card (input impedence = 100 Ohms); it’s converted to 0..10 Vdc, and it’s feeded back to the L129-036 card auxiliary input 1, on pins 23c and 23a. Also, the L127-022 card is powered by the 24 Vdc supply, through pins 1ac (+) and pins 3ac (-).
6.2.2 CONFIGURING THE L127-022 CARD The L127-022 card can be viewed as a subsystem of the L129-036 card, and provides the following functionalities: • Optional 24 Vdc power supply for the RVDT conditioning circuit, with on board protection fuse. • 4..20 mA to 0..10Vdc conversion. • Configuration jumpers, to support the different configurations of intrinsic safety barriers. Jumper settings allow to configure the card to accommodate the following barriers configurations: No barrier, Passive barrier, Active barrier. • No barrier.
The correct jumper setting is: JP1 1-2, JP2 2-3, JP3 2-3, JP4 2-3.
• Passive barrier. The correct jumper setting is: JP1 1-2, JP2 2-3, JP3 2-3, JP4 2-3.
• Active barrier. The correct jumper setting is: JP1 2-3, JP2 1-2, JP3 1-2, JP4 1-2.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 27/36
6.3 LCV CONFIGURATION When the L129-036 card is fitted into slot 7, it must be configured for LCV control. Please, note that when the LCV control is necessary, the L143-RPC-XXX system must have slot 13 and 14 fitted with two AH 77 746 cards (frequency to voltage converters). Of course, additional wiring is necessary too. The setting of the jumpers of the L129-036 card for this configuration is as follows: JP1 a-b, JP2 a-b, JP3 a-d, JP4 a-b. When the L129-036 card is used in this configurations, trimmers RV7 (transducer offset) and RV8 (transducer span) on the front panel loose their functionality. To calibrate the transducer offset and transducer span, you can use the trimming facilities made available on the AH 77 746 card (if any).
6.3.1 ADDITIONAL WIRING The signal coming from pick-up 1 is connected to pins 9 (+) and 10 (-) of the JFI connector. The signal coming from pick-up 2 is connected to pins 12 (+) and 13 (-) of the JFI connector. These pins are connected to pins 14ac, 13ac,11ac and 10ac of the L129-036 card edge connector, respectively. The additional wiring implements the following connections: L129-036 AH 77 746 13ac 30bd 14ac 28bd 23a 8bd 23c 10bd 10ac 30bd 11ac 28bd 15a 8bd 15c 10bd In other words, the signals coming from the pick-ups are feeded to the AH 77 746 cards, are converted to 0..10Vdc, and feeded back to the L129-036 card. Signal for pick-up 1 is feeded to auxiliary input 1 after conversion, while signal for pick-up 2 is feeded to auxiliary input 2 of the L129-036 card. Also, the AH 77 746 cards are powered by the 24 Vdc supply, through pins 4bd (+) and pins 2bd (-).
6.4 TWIN TRANSDUCERS ACTUATORS Sometimes, for redundancy reasons, two LVDT transducers are fitted on a single actuator, so that, should one of them fail, the other can still guarantee a working system.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 28/36
6.4.1 THE L127-021 SUBSYSTEM When two LVDT transducers are fitted on a single actuator, an L127-021 subsystem is coupled to an L129-036 card to perform the “Oscillator and demodulator” functions for the second LVDT. This subsystem is housed in the L143-RPC-XXX rack, just on the immediate right side of the L129-036 card to which it is connected. The connection between the L127-021 and the L129-036 is made by a flat cable.
6.4.2 CONNECTION OF THE SECOND LVDT As for the main LVDT, for the connection of the second LVDT typical connections of a LVDT to the L143-RPC-XXX system are described here below: Configuration 1 JFI pin Signal LVDT wire 9 In+ Orange 10 In- Blue 12 Vexc+ Red 13 Vexc- Black & Yellow Configuration 2 JFI pin Signal LVDT wire 9 In+ Orange 10 In- Yellow 12 Vexc+ Red 13 Vexc- Black & Blue Other possible configurations are: Configuration 3 JFI pin Signal LVDT wire 9 In+ Blue 10 In- Black 12 Vexc+ Red 13 Vexc- Black Orange & Yellow Configuration 4 JFI pin Signal LVDT wire 9 In+ Yellow 10 In- Black 12 Vexc+ Red 13 Vexc- Black Orange & Blue For further information about these configurations and recommendation on junction box connections, see section 6.2.1 above. If you need to reverse the polarity of the signal from the second LVDT transducer, and you choose to use the 10V complement circuit inside the L129-036 card, you need to move jumper JP2 between positions a-b and a-c untill you achieve the desired result (JP1 if for the first LVDT only!). When the L127-021 subsystem is in use, jumper JP3 on the L129-036 card must be set to position a-c.
6.4.3 CALIBRATION OF THE L127-021 SUBSYSTEM

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 29/36
The L127-021 subsystem duplicates the oscillator/demodulator stages of the L129-036 card. Components on the L127-021 have the same identifiers as components on the L129-036, for the same functionality. So, the calibration of the L127-021 subsystem is carried out much in the same way as the calibration of the same circuits on the L129-036. Please, refer to sections 4.3 to 4.3.3 and 4.4.6 for details. However, a few differences exist. First of all, the frequency for the excitation of the second LVDT transducer must be 3.2 kHz, instead of 3 kHz. This is to avoid strange couplings between the signals of the two LVDT transducers. Second, calibrations described in sections 4.3.1 to 4.3.3 must be performed with the calibration tool connected to the front connector of the L127-021 subsystem, while calibration described in section 4.4.6 must be performed with the calibration tool connected to the front connector of the L129-036 card, using TPP2 instead of TPP1. Third, the calibration of the transducer span and offset must be slightly different for the first and the second LVDT. The reason for this slight difference is the following. When the L127-021 subsystem is connected to the L129-036 card, two LVDT transducers are excited with two different signals. The feedback signals from the two LVDT transducers are demodulated, and two position signals are generated; this two signals can be measured at TPP1 and TPP2 for the first and second LVDT respectively. Then, the position signal, measured at TPP, is the highest between the two signals at TPP1 and TPP2. Now, suppose that you calibrate span and offset for the two LVDT transducers in such a way that when the actuator is at one end of the stroke the voltage on TPP1 is 0.05V and the voltage on TPP2 is 0.01V, and when the actuator is at the other end of the stroke the voltage on TPP1 is 9.98V and the voltage on TPP2 is 10.02V. With such a calibration, the voltage at TPP1 and TPP2 will be: V(TPP1) = X * 9.93 / 100 + 0.05 V(TPP2) = X * 10.01 / 100 + 0.01 Where X is the actuator’s position, ranging from 0 to 100 (%). The voltage at TPP1 equals the voltage at TPP2 for X = 50 (5.015V). Being the voltage on TPP the highest of the two voltages, it will be equal to V(TPP1) for 0 < X < 50, and it will be equal to V(TPP2) for 50 < X < 100 ! In other words, you get a non linear relationship between the actuator’s position and the voltage measured at TPP. To avoid this problem, you must calibrate span and offset of the two transducers so that the voltage / position relationships of the two transducers never cross each other. To fulfill this requirement, you must calibrate the span & offset trimmers so that the voltage at TPP1 is higher (or lower) than the voltage at TPP2 at both ends of the actuator’s stroke. For example, you should calibrate the span & offset trimmers so that when the actuator is in the safety position the voltage on TPP1 is 0V and the voltage on TPP2 is –0.02V, and when the actuator is in the opposite position the voltage on TPP1 is 10V and the voltage on TPP2 is 9.98V. With such a calibration, the voltage at TPP will always be equal to the voltage on TPP1, unless the first LVDT fails. In such a case, the voltage on TPP will automatically be equal to the voltage on TPP2, with a 0.2% error (0.02V / 10V) compared with the previous position measures.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 30/36
If you want to be sure that your calibration is correct, you can connect the probes of your DVM between TPP1 & TPP2. Then slowly move the actuator forward and backward. If your calibration was correct, the voltage you read will never change polarity (i.e. it will always be positive or negative).
6.5 A FEW FINAL SUGGESTIONS In this section we’d like to provide the user with a few final hints. Rather than by theory and design, this guidelines are suggested by experience, and provide good shortcuts to get your job done in an easier and quicker way.
6.5.1 TRANSDUCER CALIBRATION AND GAIN OPTIMISATION In section 4.4.6, a procedure for transducer calibration was described. Do not refer to the variables displayed in EEUU on the HMI for calibration purposes but only the electrical signals red on the DVM connected to the test points on the calibration tool. In section 4.4.9, a procedure for trimming loop gain and loop offset was described. The use of an oscilloscope (or recorder) is recommended for the execution of this calibration. However, if that kind of devices are not available, you could use a real time trend on the HMI display to see on the screen the step response. Be sure that the feedback variables are correctly ranged and aligned with the relevant electrical variables (see 6.5.2). To exercise the actuator with setpoint steps, it’s better to use the control device (for example a PLC). By so doing, you can check immediately if the actuator’s movement is in agreement with the commanded setpoint. It’s better to make your actuator step around the centre of the stroke, for example between 40% and 60% of the stroke. If you do so, should an oscillation arise, it’s unlikely that the actuator bumps against one or the other end of the stroke.
6.5.2 CHECKING THE FEEDBACK AGAINST THE SETPOINT The calibration procedure described in section 4.4.9 is normally the very last executed when commissioning the control system. However, due to the fact that the servoamplifier implemented inside the L129-036-B001 card is purely proportional, and due to the fact that proportional servoamplifiers can reach an equilibrium status with a non-zero error signal (i.e. the actuator stops in a position close but not equal to the desired position), a discrepancy can arise between the setpoint signal and the feedback signal. If your control device (for example a PLC) keeps monitoring the transducer position (through the Monitor signal) to check if the actuator actually is in the desired position, and if the control device causes a shutdown if the difference between the setpoint signal and the feedback signal is too high, it could be opportune to re-calibrate the Monitor output offset/span trimmers (RV3 & RV4) to avoid that this “systematic” error keeps blocking the system because the position error, at random, becomes too large.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 31/36
By “matching” the monitor output to the setpoint signal, the possibility of unwanted system shutdown is decreased. This re-calibration must be executed with the L129-036 card operating in closed loop mode. The monitor output signal should be read out of the apparatus that will later check the consistency between the setpoint signal and the monitor output signal (for example the control PLC). 1. Supply to the card a 4 mA setpoint signal. The actuator will move to the safety position. 2. Gently rotate the trimmer RV3 (Monitor offset, on the front panel), until the monitor output voltage
is 0Vdc. 3. Supply to the card a 20 mA setpoint signal. The actuator will move to the opposite position 4. Gently rotate the trimmer RV4 (Monitor span, on the front panel) until the monitor output voltage
is 10Vdc. You’ll need to repeat the four steps described above, again and again, until the monitor output signal spans exactly 0..10Vdc, when you switch the setpoint signal between 4 mA and 20 mA.
6.5.3 LIMITED STROKE Sometimes your application requires that the actuator stroke is limited to a portion of the mechanical stroke. In other words, you might want to use your actuator only between, let’s say, 10% and 90% of the mechanical stroke. You have two options to achieve the desired result: 1. Limit the setpoint signal, and consequently manage a limited feedback signal. 2. Re-adjust your position transducer calibration so that the limited stroke you desire looks like
100% of the stroke. Definitely, the first option is the most complex to manage on the command side, while the second option is the most complex on the position transducer calibration side. For example, if you need to limit the actuator’s stroke to a range from 10% to 90% of the mechanical stroke, you must limit your command signal to the range 5.6 .. 18.4 mA, and manage a feedback signal in the range 1 .. 9 V. If you choose the second option, you must first follow all the calibration procedures described in sections 4.4.5 to 4.4.9. When they’re done, switch your card to closed loop mode, and perform the following steps: 1. Supply to the card a 4 mA setpoint signal. The actuator will move to the safety position. 2. Apply a DVM probes to TPP1 of the calibration tool. Set the multimeter for measuring DC
voltage. 3. Rotate RV5 (LOOP OFFSET, on the front panel) untill the voltage on TPP1 is in the range 0.2 ..
0.5 Vdc. Rotating RV5 counterclockwise will increase the voltage you read. 4. If jumper JP1 is in position a-b, gently rotate the trimmer RV7 (Transducer offset, on the front
panel) clockwise. If jumper JP1 is in position a-c, gently rotate trimmer RV8 (transducer span, on the front panel) clockwise. As you rotate the trimmer, your actuator will move away from the mechanical end of stroke of the safety position. Stop rotating the trimmer when the actuator has reached the lower limit of the stroke you desire.
5. Supply to the card a 20 mA setpoint signal. The actuator will move to the opposite position. Because you changed the transducer offset, it might bump against the mechanical limit.
6. If jumper JP1 is in position a-b, gently rotate the trimmer RV8 (Transducer span, on the front panel) clockwise. If jumper JP1 is in position a-c, gently rotate the trimmer RV7 (Transducer offset, on the front panel) clockwise. As you rotate the trimmer, the actuator will move away from the end of stroke position. Stop rotating the trimmer when the actuator has reached the higher limit of the stroke you desire.
You’ll need to repeat the four steps described above, again and again, until your actuator exactly trips between the two desired positions, when you switch the setpoint signal between 4 mA and 20 mA.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 32/36
When you supply a 4 mA setpoint signal, rotate RV7 if JP1 is in position a-b. If you rotate it counter-clockwise, the actuator will move to the safety position end of stroke; it will move the other way if you rotate it clockwise. When you supply a 4 mA setpoint signal, rotate RV8 if JP1 is in position a-c. If you rotate it clockwise, the actuator will move to the safety position end of stroke; it will move the other way if you rotate it counter-clockwise. When you supply a 20 mA setpoint signal rotate RV8 if JP1 is in position a-b. If you rotate it clockwise, the actuator will move toward the safety position; it will move the other way if you rotate it counter-clockwise. When you supply a 20 mA setpoint signal rotate RV7 if JP1 is in position a-c. If you rotate it counter-clockwise, the actuator will move toward the safety position; it will move the other way if you rotate it clockwise.
6.5.4 LVDTs OUT OF SPECIFICATIONS. Sometimes on the actuator is fitted an LVDT which is not suitable to the purpose. It may be longer than necessary, or it may have electrical characteristics completely different from the ones for which the L129-036 card was designed. In such cases, you might discover that it’s not possible to get the transducer signal to the 0 .. 10 Vdc range by rotating just the trimmers located on the front panel. Or you might discover severe linearity errors of your position transducer. If this happens, you need to fit the L129-036 onto an extension card, and re-calibrate some internal trimmers. If you don’t have an extension card, you can still operate as follows: • Remove the 8 leftmost cards or covers from the rack. If you need to re-calibrate the GCV card,
leave in its place just this card (in slot 1, the leftmost slot). If you need to re-calibrate another card, fit it into slot 1. This will leave a huge empty space between your card and the power supply unit.
• Unless you need to recalibrate the GCV card, swap the connections of the GCV card with the connections of the card you have to recalibrate. These connections are located onto the backplane (i.e. on the back side of the rack).
• Because of the empty space left by the removed cards, you can access the internal trimmers of the card fitted into the leftmost slot. Perform the calibration, as described later in this section.
• When you are happy with the calibration, restore the original cards configuration (i.e. re-install all the cards and covers where they were). DON’T FORGET to restore the connections on the backplane too!
Depending on the problems you are experiencing, you might need to recalibrate RV13, RV14 and RV18. LVDT linearity problems are often caused by excessive distortion of the excitation signal. Looking with an oscilloscope the signal at TP1E and/or TP1I will confirm if this is the case. It might happen that the excitation signal is distorted only when the LVDT nucleus is in a limited range of the possible positions. By moving the actuator forward and backward in open loop mode, and observing the oscilloscope trace, you can check if you are having problems because of the signal distortion. If you found out that the cause of the LVDT non-linearity is just the excitation signal distortion, you can try to cure the problem by reducing the amplitude of the excitation signal. You can do this by rotating RV18 counterclockwise. Once you reduced the excitation signal to a level at which no distortion occurs, you need to recalibrate RV7 (Transducer offset) and RV8 (Transducer span), as described in section 4.4.6.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 33/36
If your problem is the impossibility to calibrate the transducer, instead, you need to recalibrate RV13 and RV14. The problem is due to the range of output voltages from the secondary winding of the LVDT, and may be caused either by the use of the LVDT on a limited range of its stroke, or by the electrical characteristics of the LVDT itself. The input stage of the L129-036 card is calibrated for an input signal ranging from 0.7 Vrms to 3.5 Vrms. If the ratio between the maximum input voltage (the one you get when the actuator is at one end of its stroke) and the minimum input voltage ( the one you get when the actuator is at the other end of its stroke) is the same (5:1), the card can largely tolerate a lower input voltage. However, the card’s input stage is only slightly tolerant versus higher input voltages: the maximum input voltage cannot exceed 3.8 Vrms, and the minimum input voltage cannot exceed 0.75 Vrms. While the upper limit for the maximum input signal at 3.8 Vrms is an absolute one (if it is exceeded saturation occurs), the upper limit for the minimum input signal can be adjusted a little by changing the calibrations of RV13 and RV14. This adjustment is only possible if the maximum input voltage is lower than the upper limit. The strategy of this adjustment can be easily understood by looking at the card’s block diagram, shown in drawing B98512, in the appendix of this document. The gain of block 3, adjusted by RV13, must be rised as much as possible; but the following criteria must be satisfied: • The voltage measured at TP1D must be always negative, for every actuator’s position. • When the input voltage is maximum, the voltage at TP1D should be around –10 Vdc, but should
not be lower than that (i.e. more negative) or the amplifier in block 3 will saturate, and saturation will cause non linearities.
• When the input voltage is minimum, the voltage at TP1D should be around 0Vdc; with the best adjustment, it should range between –0.1 Vdc and –0.2 Vdc.
A procedure to get the result described above is the following: 1. With the calibration tool connected to the card, switch to open loop mode. 2. With a DVM measuring AC voltages, connected to TP1I, find out at which actuator’s position the
LVDT provides the maximum input voltage. Of course the LVDT will provide the minimum input voltage when the actuator is at the opposite position. Take a note about these positions.
3. Connect the DVM’s probes to TP1D. Set the instrument for measuring DC voltages. 4. Move the actuator to the position where the input voltage is maximum. 5. Rotate RV13 clockwise, untill the voltage on TP1D is between –9.5Vdc and –10 Vdc, or untill
any further rotation does not cause any voltage change. If this happens, rotate RV13 back to a position in which a rotation in either direction does cause a voltage change.
6. Move the actuator to the position where the input voltage is minimum. 7. Rotate RV14 counter-clockwise, untill the voltage on TP1D is about 0 Vdc or sligltly negative
(i.e. in the range –0.1 Vdc to –0.2 Vdc). If you can get this condition fulfilled, go back to step 4. If you cannot, continue with the next step.
8. Rotate RV13 counterclockwise, untill the condition of the previous step is met. Again, make sure that if you rotate RV13 in either direction you get a voltage change on TP1D: this guarantees that no saturation occurs in any amplifier stage between the LVDT input and TP1D. When this is done, you have finished, and you can proceed with the transducer offset and transducer span calibration, described in section 4.4.6.
6.5.5 4-WIRE LVDTS. It might happen that the employed LVDT position transducer is not one of those described above in section 6.1.2. The L129-036 card has a transducer conditioning stage that nicely adapts to different kinds of LVDTs; often, it can be adapted to a different type of LVDTs by just rotating a few trimmers in the right way.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 34/36
If documentation about the LVDT is not available, first of all you need to identify which wires are connected to the primary winding and which ones are connected to the secondary winding. If you measure the resistance between two wires belonging to the same winding, you read a low value, ranging from a value as low as 20 Ohms to a value as high as a few kOhms; if you measure the resistance between two wires belonging to different windings, you get an “open circuit” reading. Normally the primary winding has a lower resistance than the secondary winding. Once you know which wires connect to the primary winding and which wires connect to the secondary winding, proceed by connecting the LVDT to the L129-036 card. Connect the primary winding to pins 4 & 5 of JFI, and the secondary winding to pins 1 & 2 of JFI. Connect to the card the calibration tool, then power on the card. Connect the probes of an oscilloscope to the calibration tool: the probe’s ground connection must be connected to test point marked “0V”, the probe itself must be connected to the test point marked TP1I. Set the instrument time base to 100 us/div, and the amplitude to 1V/div or 2V/div. If the LVDT documentation is available, check first if the excitation signal of 7 Vrms at 3 kHz is suitable for that LVDT. If not, you need to change the excitation signal (see section 4.3 to 4.3.2) output by the L129-036 card. Now you need to explore how the voltage output by the LVDT varies as the nucleus is moved along the whole stroke. If the LVDT is not installed in the field, and you have it on the table, you just manually move the nucleus by hand. If the LVDT is already in the field, however, you need to move the actuator to which it’s coupled. To move the actuator, in such a case, you must switch the L129-036 to open loop mode (see section 4.4.5), and use the knob on the calibration tool to move the actuator forward and backward. Look carefully at the signal displayed on the oscilloscope screen; what’s most important is the amplitude of the sinusoid: if moving the nucleus from one end to the other of the stroke, the amplitude never drops to zero (let’s call this “case 1”), you can very likely adapt the LVDT to the L129-036 with little work; However, if the sinusoid amplitude becomes zero (let’s call this “case 2”) at one point of the stroke (usually at the centre) you may need some more work to get that LVDT working together with the L129-036. If you have a “case 1” LVDT, check the voltage at test point TP1D of the calibration tool: moving the LVDT nucleus from one end of the stroke to the other, you should always read a negative voltage. If you always read a positive voltage, just swap the connections of the two wires of the secondary winding; once you’ve done this, check that the above condition (i.e. the voltage at TP1D is always negative) is fulfilled. At this point, by calibrating RV7 and RV8 (transducer offset and transducer span) you can easily get you LVDT working (see also section 4.4.6). If you have a “case 2” LVDT, you have two options to make it work together with the L129-036 card: you can either change substantially the card’s calibrations or you can make your LVDT appear to the L129-036 like one of those described in section 6.1.2. The later option requires the availability of a couple of resistors. If you decide for the first option you must be aware: once you have substantially changed the card’s calibrations, you can no longer use that card with one of those LVDTs described in section 6.1.2. In other words, the card you alter is “dedicated” to the “special” LVDT, and cannot be used for “normal” LVDTs any more, unless you recalibrate the card, following the calibration procedure from the beginning. Now, perform the following steps: 1. Disconnect the LVDT from the card. 2. Connect the probes of a DVM to test point TP1D of the calibration tool. Set the DVM for reading
DC voltages. 3. Rotate RV14 untill you read 0Vdc. 4. Connect the DVM’s probe to test point TPP1 of the calibration tool.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 35/36
5. Rotate RV7 (Transducer offset, on the front panel), until the voltage you read on TPP1 is equal to +5Vdc.
6. Reconnect the LVDT to the card. 7. Connect the probes of a DVM to test point TP1D of the calibration tool. Set the DVM for reading
DC voltages. 8. Move the LVDT nucleus to one end of the stroke. 9. Calibrate RV13 in such a way that the voltage you read at TP1D is either +9.5Vdc or –9.5Vdc. 10. Move the LVDT nucleus to the other end of the stroke. 11. Check that the voltage you read on TP1D does not exceed, in absolute value, 9.5V. The voltage
you read should be about the same you read with the LVDT nucleus in the opposite position, but with the opposite polarity.
12. Move the LVDT nucleus to one end of the stroke. If the voltage you read on TP1D is positive, move the LVDT nucleus to the other end of the stroke; you should read a negative voltage on TP1D.
13. Move the DVM probe to TPP1. 14. Calibrate RV8 (Transducer span, on the front panel) until you read +10Vdc on TPP1. 15. If you got +10Vdc on TPP1 when the LVDT nucleus is in the safety position (where you would
expect a 0Vdc reading on TPP1) just swap the connections of the two secondary winding wires, and restart this procedure from the step 7.
16. Move the LVDT nucleus to the other end of the stroke. 17. Check the voltage on TPP1: it should be 0Vdc. If it’s not, rotate RV7 until it is. 18. Move again and again the LVDT nucleus between the two ends of the stroke, and calibrate RV7
and RV8 to get exactly 0Vdc at one end of the stroke and 10Vdc at the other end of the stroke. Rotate RV7 to adjust the 0V reading, and RV8 to adjust the 10V reading.
If you choose the second option (i.e. make your LVDT look like one of those described in section 6.1.2), you need a couple of resistors. The resistance values of the two resistors should be such that the value ratio is about 7 : 3 and the sum of the two resistances is between 3 KOhm and 10 KOhm. For example, you could choose R1=5K6 and R2=2K2. Now, connect the LVDT and the resistors as shown in the following diagram: Primary Secondary JFI-4 JFI-1 R1 R2 JFI-5 JFI-2 The resistive divider connected in parallel to the primary winding of the LVDT artificially creates the missing tap in the primary winding. Then, the connection is the same as configurations 3 & 4 described above in section 6.1.2. The choice of the values of R1 & R2 should keep these criteria in mind. 1. The lower the sum of the two resistances, the higher is the overload of the excitation stage of
the L129-036 card, and consequently the lower will be the resulting excitation voltage. In fact, the resistor divider is in parallel with the primary winding, and the lower its resistance is, the lower the impedance seen by the excitation driver is.
2. The parallel of resistors R1 & R2 adds to the input impedance of the input stage of the L129-036 card. If the value of R1 || R2 is too high, the accuracy of the input stage could be degraded.

Instruction Manual Board L129-036-B001 Ref. LNW 00036.a Doc. B 98 514 Pag. 36/36
3. The ratio between the values of R1 & R2 must be such that the RMS voltage measured between JFI-1 and JFI-2 never drops to zero and never exceeds 3.5V, for any position of the LVDT nucleus. If either of the two above conditions cannot be satisfied, then this connection is not a suitable one. You can know in advance if you are facing this kind of failure: measure the output voltage from the secondary winding (open circuit): if the output voltage exceeds 1.4 Vrms for any LVDT nucleus position, then this connection circuit is not suitable: you must revert to option 1 (recalibrate the L129-036).