Embed Size (px)
Citation preview

Multi-UAV swarming
Advisor: Dr. Manish Kumar
Mentor: Mr. Balaji Sharma
Co-operative Distributed Research Laboratory
School of Dynamic Systems
University of Cincinnati
06/18/2012
REU program Summer 2012
REU program Summer 2012
06/18/2012
Multi-UAV swarmingOBJECTIVES
• Familiarization with real-time motion tracking of dynamic bodies (OptiTrack)
• Familiarization with hardware capabilities and limitations of the UAV systems (Skybotix CoaX coaxial helicopters, Ascending Technologies’ Pelican quadrotors)
• Understanding communication protocols for UAV control (serial, TCP/IP, UDP)
• Understanding the basics of cooperative control algorithms in a simulation environment
• Implementation of a based cooperative control algorithm using the indoor UAV setup in the IMAGE platform
REU program Summer 2012
06/18/2012
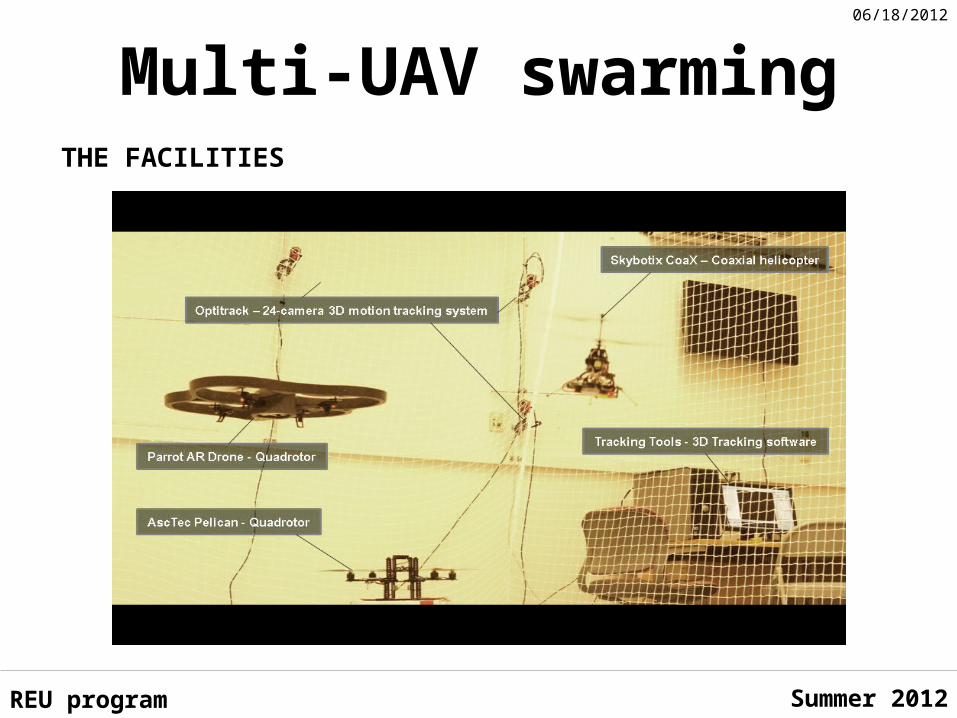
Multi-UAV swarmingTHE FACILITIES

REU program Summer 2012
06/18/2012
Multi-UAV swarmingEXPECTED DELIVERABLES
• Demonstration of real-time motion capture of UAV maneuvers in a 3D space. Assessment of the capabilities and evaluation of errors in the tracking system.
• Detailed evaluation of the hardware capabilities of the UAV systems for application in cooperative control experiments.
• Demonstration of basic UAV control with commands executed wirelessly from a remote computer.
• Developing a simulation model for a cooperative control algorithm implementing cyclic pursuit among the UAVs.
• Experimental implementation of the algorithm using the indoor UAV systems in the IMAGE platform.
REU program Summer 2012
06/18/2012
Multi-UAV swarmingTIMELINE
Week 1• Familiarization with lab facilities and hardware resources.• Familiarization and experimental evaluation of the motion tracking
system.Weeks 2-4• Detailed evaluation of the hardware capabilities of the UAV systems
for application in cooperative control experiments.• Working knowledge of communication protocols and UAV control• Demonstration of basic UAV control – test runsWeek 5• Development of a simulation model for a cyclic pursuit cooperative
control algorithmWeeks 6-7• Experimental implementation of the cooperative control algorithmWeek 8• Documentation and presentation

![Presented By - Aryan CollegeBALAJI BALAJ1i BALAJI NAMKEE,v BALAJI NAM KEEN Kna BAL BALAJI sNAFERS BALAJii BALAJI AN AFERS BALAJI 0ÈERs BALAJI BALAJI only BALAJI Ctlinese ej/ffJ1]JžfJ](https://img.pdfslide.net/doc/110x75/5eaecb507cb6087a2d0ae9dc/presented-by-aryan-college-balaji-balaj1i-balaji-namkeev-balaji-nam-keen-kna.jpg)



























