Embed Size (px)
Citation preview
Near-Optimal Decision-Making in Dynamic Environments
Manu Chhabra1
Robert Jacobs2
1Department of Computer Science2Department of Brain & Cognitive Sciences
University of Rochester
Dynamic Decision-Making
• Decision-making in environments with complex temporal dynamics
– Decision-making at many moments in time
– Temporal dependencies among decisions
• Examples:
– Flying an airplane
– Piloting a boat
– Controlling an industrial process
– Coordinating firefighters to fight a fire
Outline
• Experimental project:
– Is human adaptive control optimal across different noise environments?
• Computational project:
– Can optimal movements be planned as linear combinations of optimal motor primitives?
Dynamics and Noise
• Adaptive control requires learning about both the dynamics and the noise of a complex system
• Dynamics: relationship between control signals and the expected responses to these signals
• Noise: relationship between control signals and the variances of the responses to these signals
Dynamics and Noise
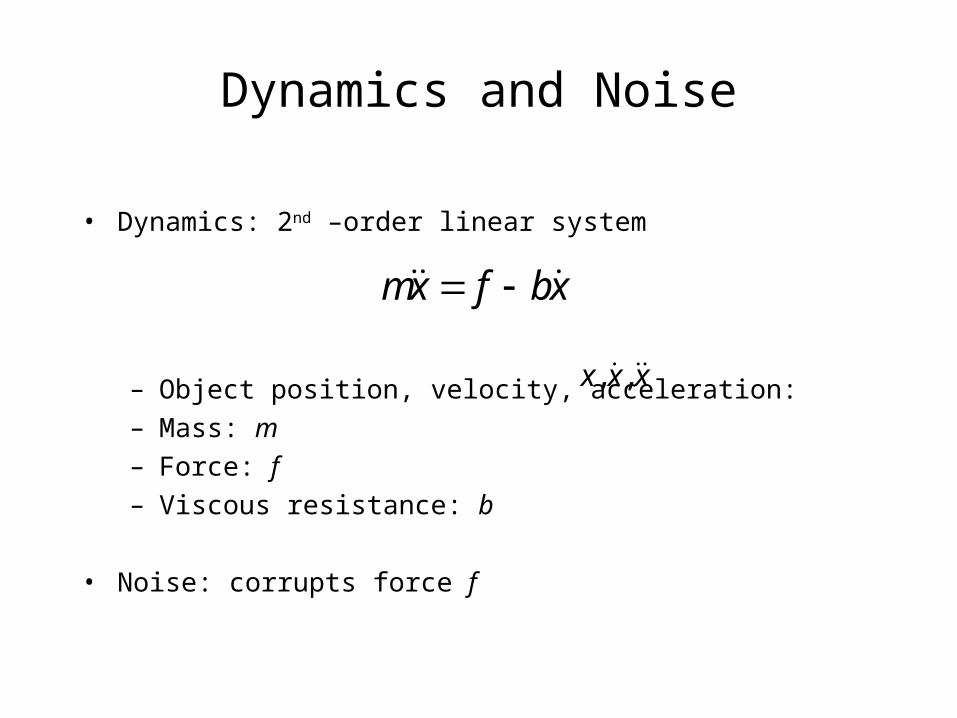
• Dynamics: 2nd –order linear system
– Object position, velocity, acceleration:
– Mass: m
– Force: f
– Viscous resistance: b
• Noise: corrupts force f
xbfxm
xxx ,,
Three Noise Conditions
• No-Noise (NN)
• Proportional Noise (PN)
– Small forces are corrupted by small amounts of noise
– Large forces are corrupted by large amounts of noise
• Inversely-Proportional Noise (IPN)
– Small forces are corrupted by large amounts of noise
– Large forces are corrupted by small amounts of noise
Ideal Actors
• Optimal control laws computed via dynamic programming
– Optimal control law depends on the noise characteristics of the environment
– Different ideal actors were created for different noise conditions
• Efficiency:
– Ratio of subject’s performance to expected performance of ideal actor
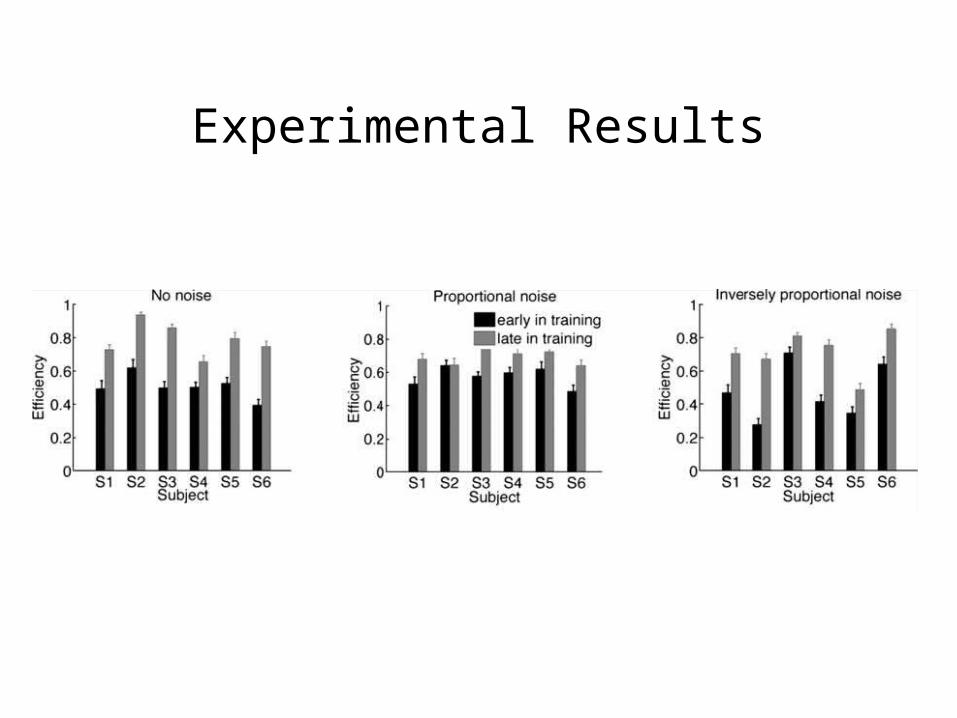
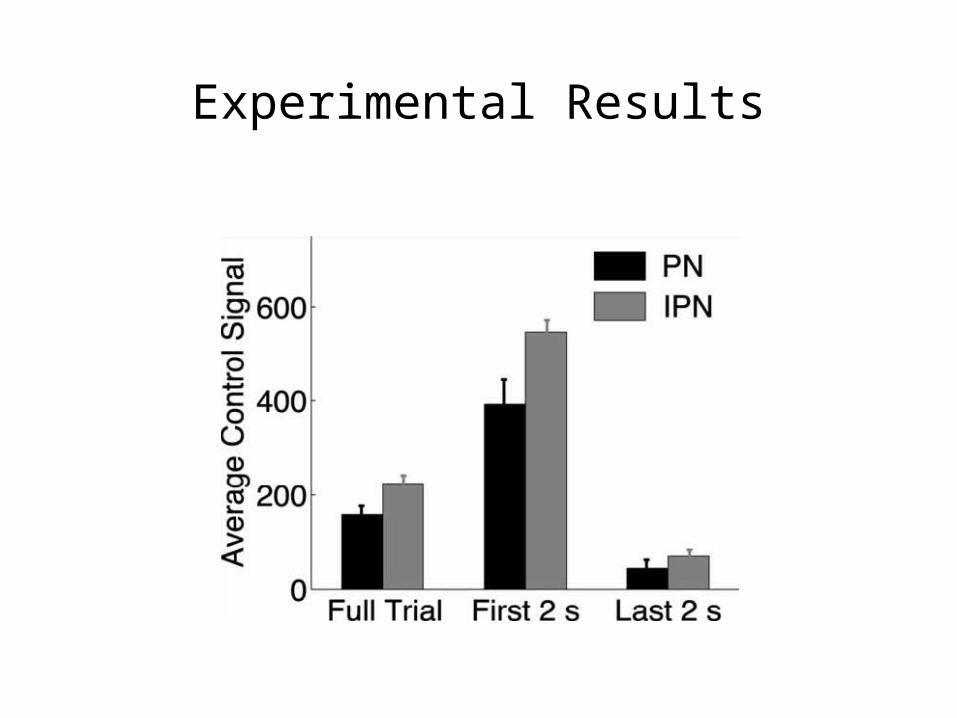
Experimental Results
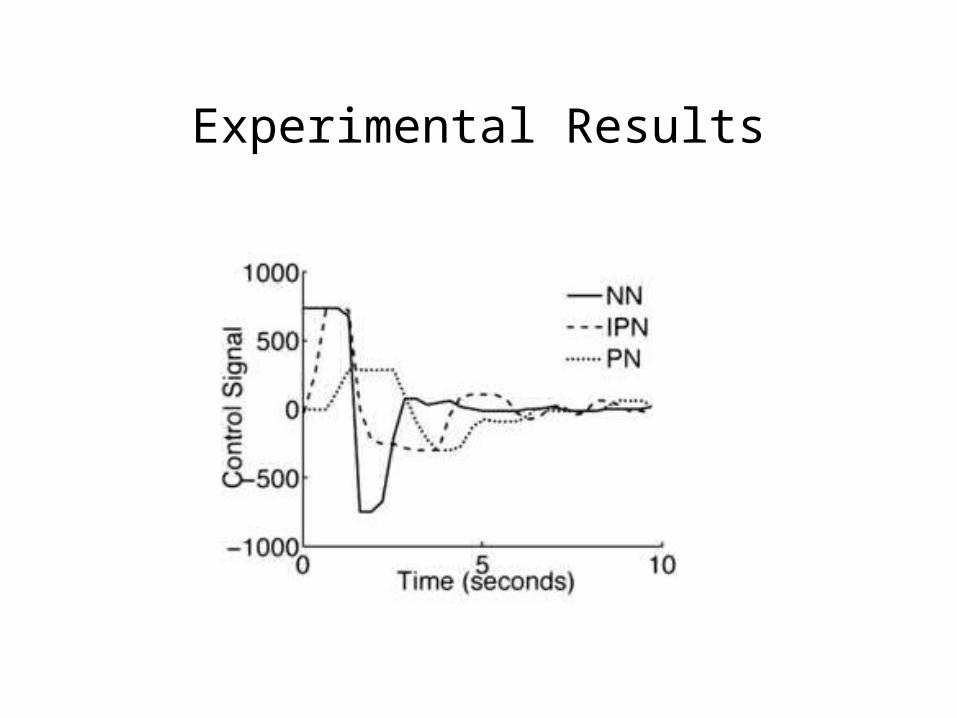
Experimental Results
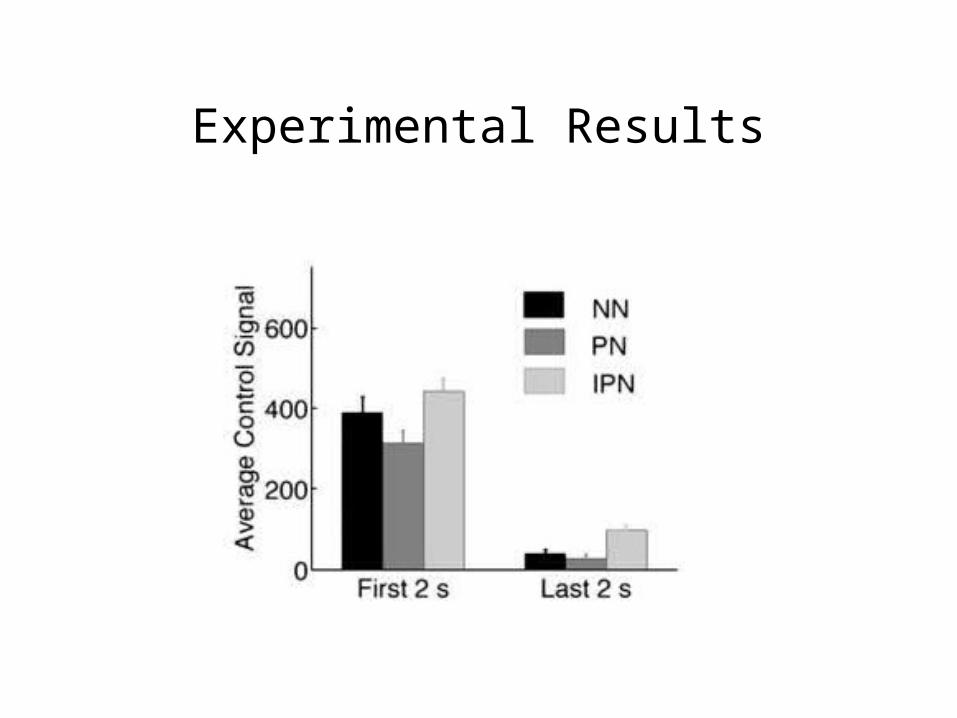
Experimental Results
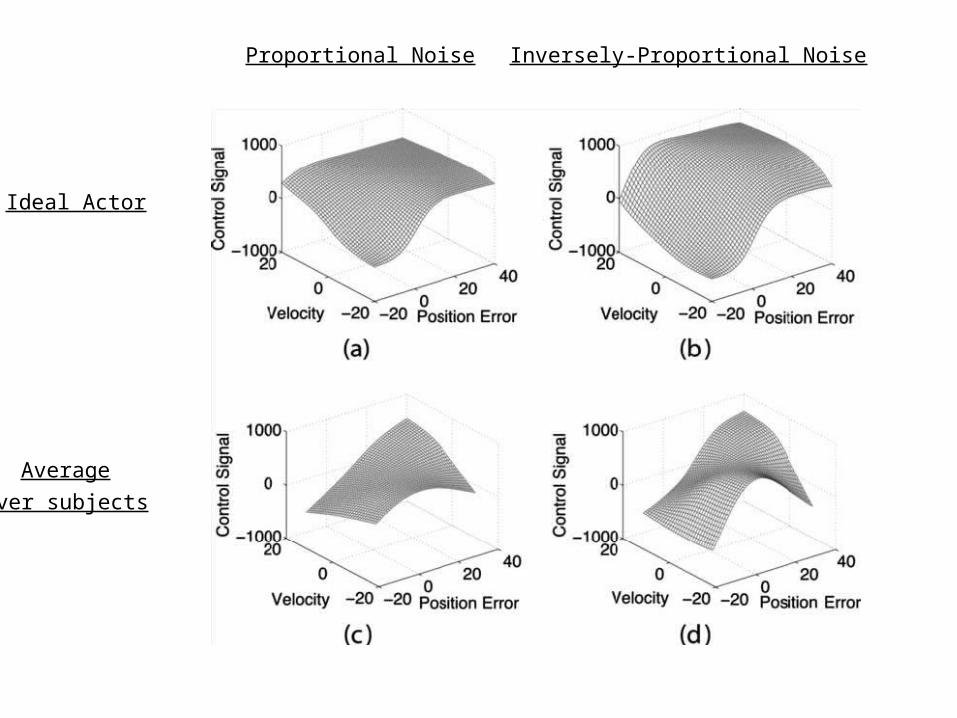
Proportional Noise Inversely-Proportional Noise
Ideal Actor
Average
over subjects
Conclusions
• Subjects learned control strategies tailored to the specific noise characteristics of their conditions
– Allowed them to achieve levels of performance near the information-theoretic upper bounds
• Conclude: Subjects learned to efficiently use all available information to plan and execute control policies that maximized performances on their tasks
Conclusions
• Q: Is human adaptive control optimal across different noise environments?
• A: Yes (under the conditions studied here)
Computational Complexity of Motor Control
• Task: Apply torques to a two-joint arm so that its endpoint moves from location A to location B in 100 time steps
• Assume: At each moment in time, torque is either on or off at each joint
• Q: How many torque sequences are possible solutions?
• A: 2200
• “Curse of dimensionality”
Motor Synergies
• Motor synergies: dependencies among degrees of freedom
• Motor synergies = motor primitives– Basic units of behavior that can be linearly combined to
form complex units of behavior– To form complex behavior: only need to specify linear coefficients
• Behavioral and physiological evidence
Approach
• Hypothesis: Optimal motor control can be achieved by combining a small number of scaled and time-shifted optimal synergies
• If so, motor control is easy
– Only need to specify scaling coefficients and time-shifts
• Q: How do we find optimal synergies?
Strategy
• First, find optimal solutions to tasks in training set
– Optimal solution is an optimal sequence of torques that moves a motor system from an initial state to a goal state
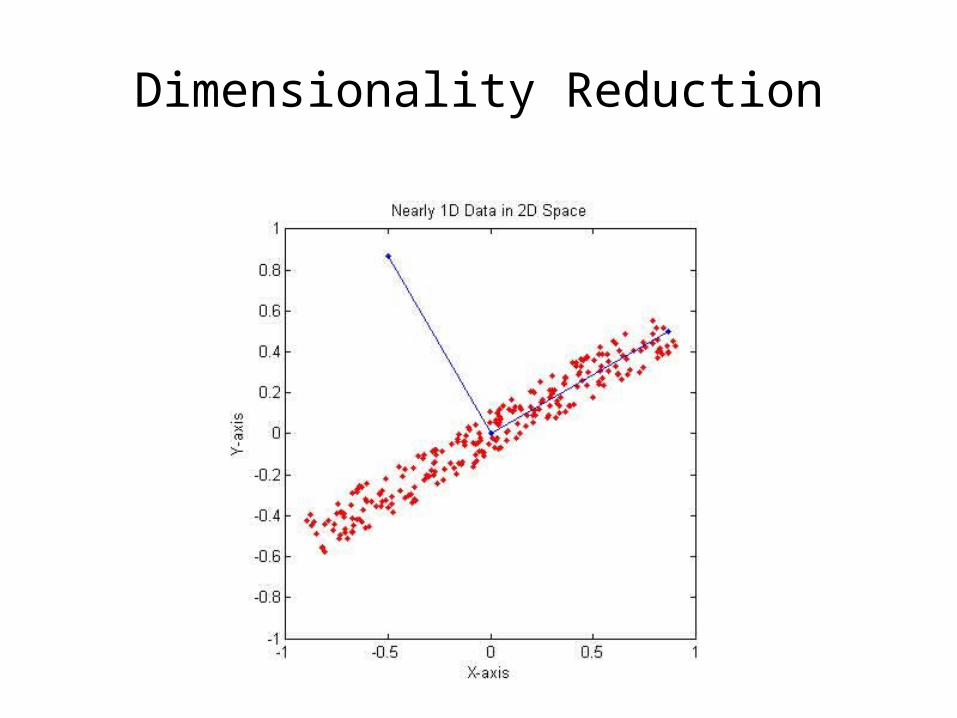
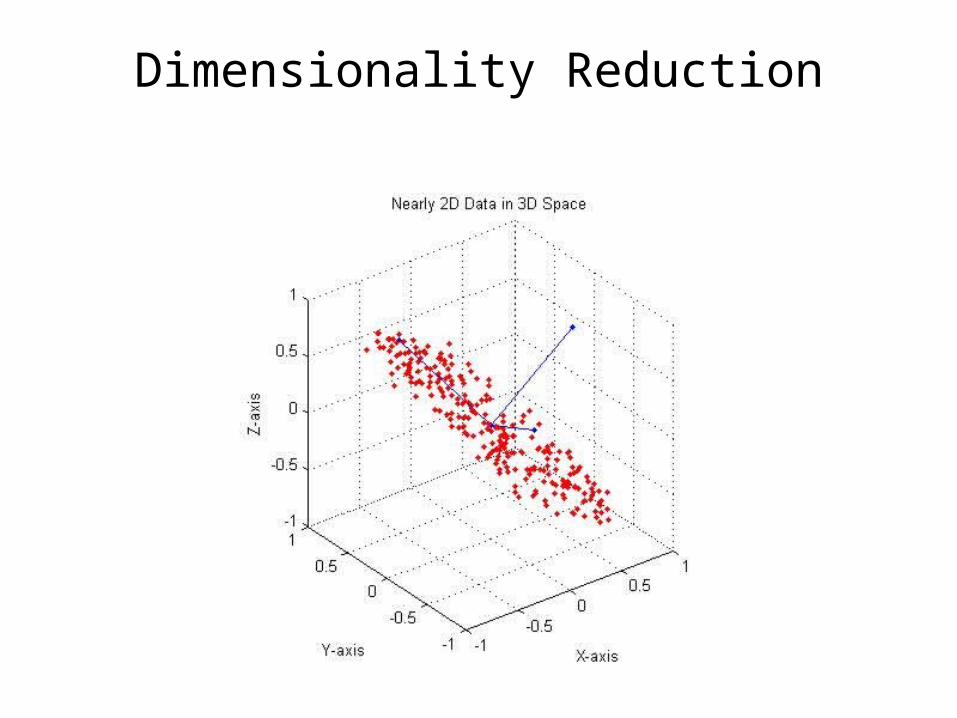
• Next, perform dimensionality reduction on space of possible solutions
– Optimal solutions lie on a low-dimensional manifold
– Important directions = motor synergies
– Technique: non-negative matrix factorization
Strategy
• Lastly, find solutions to novel tasks in test set using synergies
– Linear coefficients
– Time-shifts
Motor Tasks
• Reaching task: move the endpoint of a simulated two-joint robot arm from one location to another in a specified time period
• Via-point task: move from one location to another while passing through an intermediate location
Simulations
Example: Reaching task
• 256 tasks in training set
– Find (approximate) optimal solutions to each task
– Find optimal motor synergies via dimensionality reduction
• 64 tasks in test set
– Find solution to each task by combining motor synergies• Linear coefficients
• Time-shifts
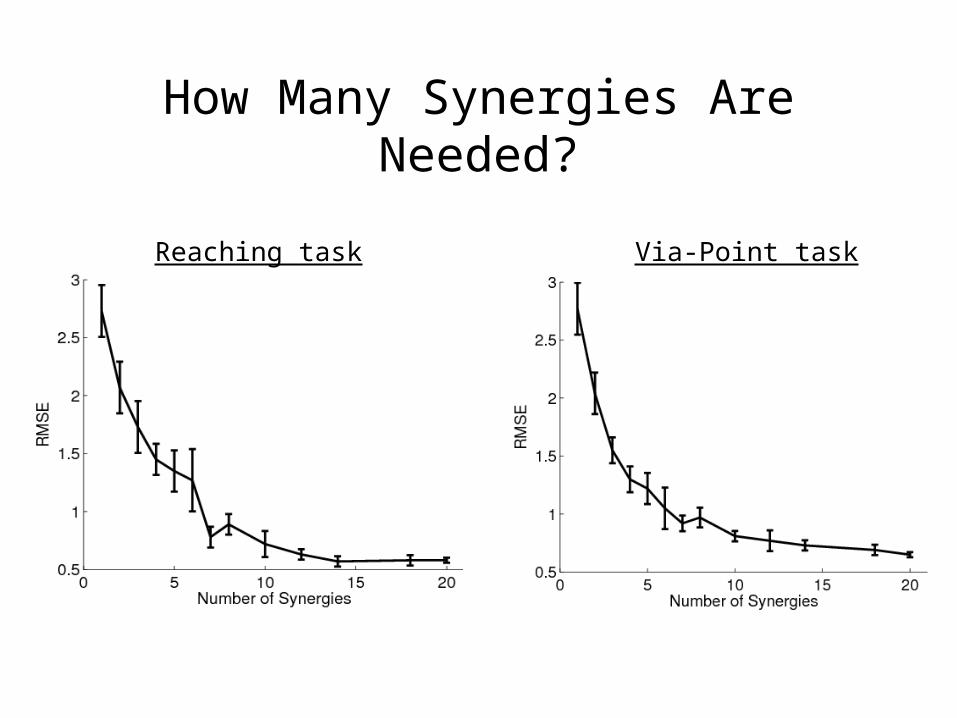
How Many Synergies Are Needed?
Reaching task Via-Point task
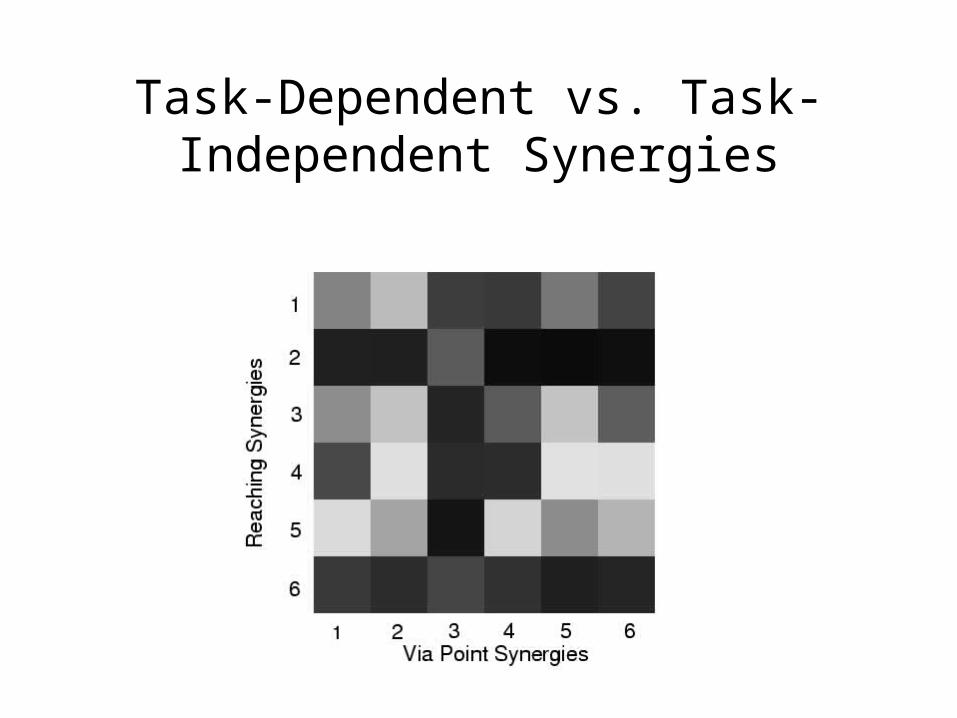
Task-Dependent vs. Task-Independent Synergies
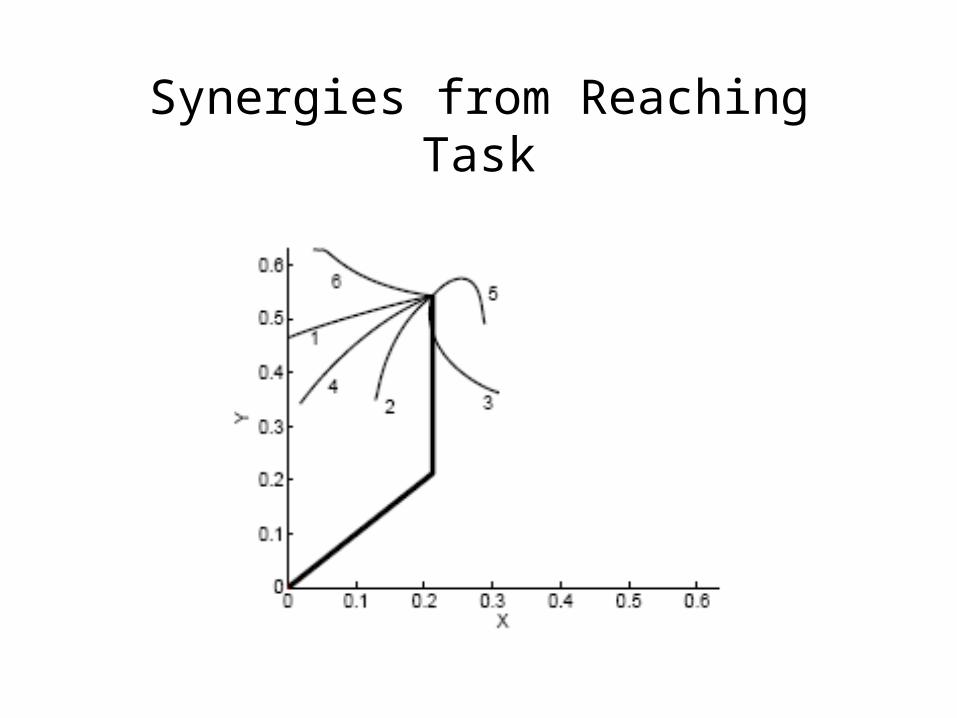
Synergies from Reaching Task
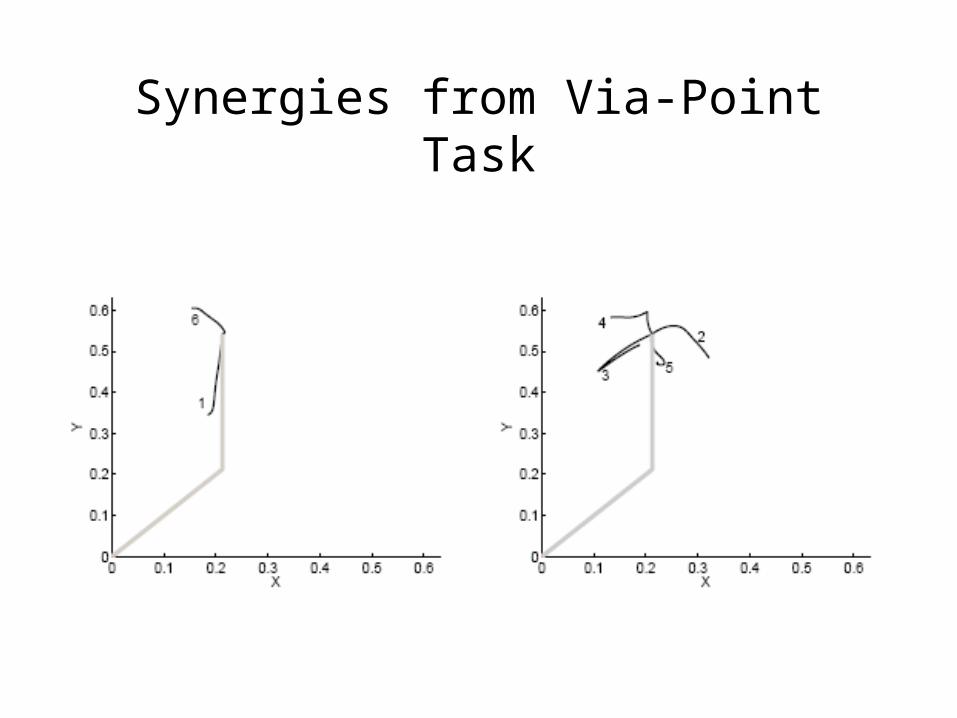
Synergies from Via-Point Task
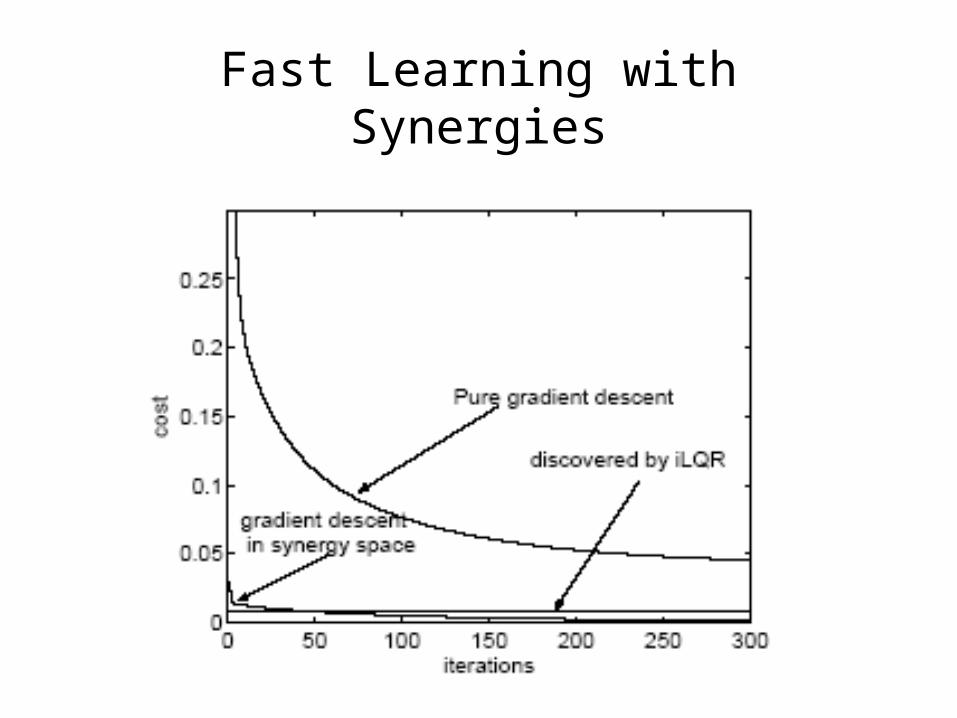
Fast Learning with Synergies
Summary
• Optimal solutions lie on a low-dimensional manifold– Dimensionality reduction for discovering optimal
synergies
• Near-optimal motor control by combining scaled and time-shifted synergies
• A small number of synergies are sufficient
• Task-dependent and task-independent synergies
• Learning with synergies is fast
• Additional research: two-joint arm with muscle model
Future Directions ???
• Normative Ideal Actor :
– unlimited computational power
– unlimited memory
– Provides information-theoretic upper bound on performance
• Human Ideal Actor:
– limited computational power
– limited working and long-term memory
– Provides upper bound on performance if one has human cognitive limitations
Experimental Results
Dimensionality Reduction
Dimensionality Reduction