-
7/30/2019 Neuro PID Tracking Control Air Discharger
1/11
Neuro-PID tracking control of a discharge
air temperature system
M. Zaheer-uddin *, N. Tudoroiu
Department of Building, Civil and Environmental Engineering,
Concordia University, Montreal, Canada H3G 1M8
Received 15 April 2003; received in revised form 15 September
2003; accepted 23 November 2003Available online 22 January 2004
Abstract
In this paper, the problem of improving the performance of a
discharge air temperature (DAT) system
using a PID controller and augmenting it with neural network
based tuning and tracking functions is
explored. The DAT system is modeled as a SISO (single input
single output) system. The architecture of the
real time neuro-PID controller and simulation results obtained
under realistic operating conditions are
presented. The neural network assisted PID tuning method is
simple to implement. Results show that the
network assisted PID controller is able to track both constant
and variable set point trajectories efficiently
in the presence of disturbances acting on the DAT system.
2003 Elsevier Ltd. All rights reserved.
Keywords: Discharge air temperature system; SISO system; HVAC
systems; Temperature control; Neural network
control; PID control; Neuro-PID tuning; Tracking control
1. Introduction
The control of heating, ventilating and air conditioning (HVAC)
systems is a difficult problem
because even the simplest HVAC system models are multi-variable
and nonlinear. Furthermore,these systems are acted upon by multiple
disturbances. For these reasons, there is considerableinterest in
developing real time control strategies to improve the performance
of HVAC systems.
Several specific aspects of HVAC systems modeling and control
have been considered in theliterature. For example, the issue of
discharge air temperature (DAT) control in HVAC systemshas been
studied by Shavit [1], Nesler [2], Dexter and Haves [3] and Seem
[4]. In our research, we
Energy Conversion and Management 45 (2004) 24052415
www.elsevier.com/locate/enconman
* Corresponding author. Tel.: +1-514-848-3194; fax:
+1-514-846-7965.
E-mail address: [email protected] (M.
Zaheer-uddin).
0196-8904/$ - see front matter
2003 Elsevier Ltd. All rights
reserved.doi:10.1016/j.enconman.2003.11.016
http://mail%20to:%[email protected]/http://mail%20to:%[email protected]/
-
7/30/2019 Neuro PID Tracking Control Air Discharger
2/11
are interested in adapting some neuro-modeling procedures to
build a real time neuro-PID
controller for a DAT system.Single loop feedback controllers are
used to maintain the temperature, humidity and pressure at
their respective set points in HVAC systems in commercial
buildings. Some work has already beendone in this area. For
instance, the development of control strategies for improving the
perfor-mance of PID controllers using self tuning and adaptive
control techniques has been studied byDexter and Haves [3], Nesler
[2] and Seem [4,5]. The authors conclude that the magnitude of
the
disturbances found in the HVAC industry causes problems when
applying self tuning andadaptive control methods. Also, it has been
reported that unmodeled process disturbances andactuator hysteresis
limit the effectiveness of the RLS self tuner as such. More
recently, adaptive
techniques that utilize statistical experimental design methods
have been designed [4,5]. Here, weare interested in finding a
simple neural network based strategy for tuning the
proportional
integral-derivative (PID) controller so that the control loop
performance is improved while thecontroller remains in the closed
loop.
2. DAT system oriented structure
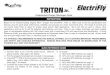
A typical configuration of a DAT system is shown in Fig. 1.
Outdoor air (OA) and room return
air (RA) are mixed, and the mixed air is filtered and circulated
in the cooling and dehumidifyingcoil. The chilled water flow rate
is modulated using a valve, a motor-actuator and a PID con-troller.
The discharge air temperature [CCOTS] is controlled to track a
chosen set point by
regulating the valve position [VALOP], which varies the mass
flow rate [CWFRG] (gpm) ofchilled water entering the coil. The
experimental setup also includes measurements of chilled
watertemperatures entering [CWSTS] and leaving [CWRTS] the cooling
coil. The temperature of air
entering the cooling coil was measured by the sensor [CCITS],
and the airflow rate was recordedby a differential pressure sensor
[DPS]. Measurements were made of the above variables every 4
s.Several tests were conducted to gather the data needed for
training the neural networks. The data
collected represented three different operating points of the
system, the low, medium and highload conditions that typically
occur in HVAC systems.
CWFRG4.40 GPM
VALOP58.78 PCT
CWSTS7.0 DEG. C
DPS260.5 CFM
CWRTS12.0 DEG. C
OA
RA
CoolingCoil
CCITS25.6 DEG. C
CCOTS11.0 DEG.CDischarge Air
Temperature System
Fig. 1. The discharge air temperature (DAT) control system.
2406 M. Zaheer-uddin, N. Tudoroiu / Energy Conversion and
Management 45 (2004) 24052415
-
7/30/2019 Neuro PID Tracking Control Air Discharger
3/11
From the point of view of modeling, it is useful to
conceptualize the DAT system as a multi-
input multi-output (MIMO) and single-input single-output (SISO)
system as shown, respectively,in Figs. 2 and 3. In the MIMO system,
the inputs to the model is chilled water flow rate mw,
[CWFRG](gpm), air flow rate Qa, [DPS](cfm), chilled water supply
temperature Twi, [CWSTS](F)and cooling coil inlet temperature Tai,
[CCITS](F), and its outputs are cooling coil outlet
mwTao
Qa
Twi Two
Tai
Cooling Coil
Fig. 2. DAT systemMIMO model input/output functional block:
cooling and dehumidifying coil model
(mw CWFRG; Qa DPS; Twi CWITS; Tai CCITS; Tao CCOTS; Two
CWRTS).
mwTao
Cooling Coil
Fig. 3. DAT systemSISO model input/output functional block:
sensible coil-model (mw CWFRG; Tao CCOTS).
K
error backpropagation
p K*p target Kp
_ gain parameter
ynn (k+1)_ _
+
y*
(k+1)
ICKi Kd Kp
u(k) y(k+1)
y*(k) e(k)
-
PI D
Controller
DAT Plant
Hp(z)
z-1
z-1
z-1
z-1
z-1
Ziegler-Nichols
IC
Fig. 4. Neuro-PID controller structure.
M. Zaheer-uddin, N. Tudoroiu / Energy Conversion and Management
45 (2004) 24052415 2407
-
7/30/2019 Neuro PID Tracking Control Air Discharger
4/11
temperature Tao, [CCOTS](F) and chilled water return temperature
Two, [CWRTS](F). On theother hand, in the SISO model, a more
simplistic point of view is taken in order to reduce themodel
complexity. In the SISO model, the discharge air temperature Tao,
is the output, and
the chilled water mass flow rate mw, is considered as the input
to the system. The other variableswere considered as disturbances
on the system.
In a previous study [6], the predictions from the MIMO and SISO
models were compared. It
was shown that the SISO model predictions are close to those of
the MIMO model. As such, forcontrol design, a simpler model, such
as the SISO model, is more suitable than the MIMO model.
The resulting inaccuracies in modeling can be compensated by
designing robust controllers thatcan compensate for the model
uncertainties. With this as the motivation, we propose to use
theSISO model to design a neuro-tracking controller for the DAT
system. By tightly regulating thedischarge air temperature close to
an optimal set point, the overall performance of the system
could be improved.
3. Neuro-PID controller
Precise modeling of the DAT process is difficult to perform due
to its high nonlinearity. Re-
cently, models derived using neural networks have been shown to
offer advantages in bothaccuracy and robustness over more
traditional statistical approaches (regression methods). The
Fig. 5. Neuro-PID controller-discharge air temperature response
for u3 2 F.
2408 M. Zaheer-uddin, N. Tudoroiu / Energy Conversion and
Management 45 (2004) 24052415
-
7/30/2019 Neuro PID Tracking Control Air Discharger
5/11
neural networks are capable of generalizing and learning dynamic
relationships between the in-puts and outputs of the plant.
Furthermore, the neural networks can constantly update
theirconnection weights to respond to changes in the plant
dynamics. Our objective in this research is
to determine an accurate neural network based PID controller for
the DAT system. The controlleris assumed to have the transfer
function:
Hcz Kp Ki
1 z1 Kd1 z
1
and is shown in this paper to provide good tracking performance
for the temperature output andto reduce substantially the effect of
the disturbances. The self learning feature of the neural
networks can be exploited in autotuning the PID gain parameters
(proportional gain Kp, integralgain Ki and derivative gain Kd)
where there are nonlinearities that cannot be expressed in
closed
form or some unidentified dynamic modes [7]. Recent work has
developed advanced structuresand algorithms, such as adaptive
neuro-controllers and exponentially weighted moving average(EWMA)
neuro-controllers. In this study, an inputoutput data set was used
to train feed forward
neural networks using the error back propagation algorithm. For
this purpose, we consider aneural network configuration that
consist of three layers [7], namely 522, shown in Fig. 4,trained by
an error back propagation technique [8,9]. The neural network
training was continued
until an error goal, defined by the mean square root error (MSE)
criterion, was met. The MSEcriterion was defined as
Fig. 6. Neuro-PID controller-chilled water flow rate response
for u3 2 F.
M. Zaheer-uddin, N. Tudoroiu / Energy Conversion and Management
45 (2004) 24052415 2409
-
7/30/2019 Neuro PID Tracking Control Air Discharger
6/11
E 12Xi
kyi tik2 1
The back propagation technique in the training of neural
networks looks for the minimum of the
network error function in weight space using the method of
gradient descent, where yi representsthe output of the neural
network, and ti represents the output target value in the
supervised
learning mode.To this end, we consider the neural network
architecture shown in Fig. 4. In Fig. 4, the plant
error and its delayed signals are used as inputs. It was found
that five delayed error signals wereneeded to capture the dynamics
of the DAT control loop accurately. Furthermore, the errorbetween
the neural network output and the plant output, as well as the
error in the predicted
proportional gain and the target proportional gain, were back
propagated as shown in Fig. 4.To initiate the training process, one
could assign arbitrary values for the PID gain
parameters.Alternately, the PID gain parameters could be computed
using well known techniques, such as theZieglerNichols method, and
used as initial values. The system error ek was defined
ek yk 1 yk 1
and was used in the supervised training mode. For greater
efficiency, we consider the neural
network structure with one parameter fixed, for example, the
proportional gain KP, and the otherparameters (Ki;Kd) are then
determined directly by the neural network structure, as the outputs
of
Fig. 7. Neuro-PID controller-discharge air temperature response
for u3 4 F.
2410 M. Zaheer-uddin, N. Tudoroiu / Energy Conversion and
Management 45 (2004) 24052415
-
7/30/2019 Neuro PID Tracking Control Air Discharger
7/11
the hidden layer. The idea behind this scheme is to let the
neural network find all three parameters(Kp;Ki;Kd) by presenting
the inputoutput data set of the DAT system. We note that the use
of
initial PID parameter values obtained using the ZieglerNichols
procedure greatly improved theconvergence of the algorithm as
compared to Ahn [7] where the initiation of the process in
closed
loop is not specified. Also, the architectural structure of the
PID neuro-control strategy is sim-plified using one single hidden
layer, and this eliminates ambiguity in the selection of the
output
parameters Kp, Ki, Kd. Even though this technique still requires
one to specify a target gain (suchas Kp when a full PID control is
implemented), its advantage is obvious when using only the
PIcontrol. In the PI mode, only two gain parameters are needed,
which can be updated by thenetwork by back propagating the neural
network output and the plant error. Since in many
HVAC systems, including the DAT systems, the derivative action
is rarely used as such, thenetwork structure shown in Fig. 4 can be
readily simplified to a neuro-PI controller by eliminatingthe
target Kp gain.
4. Simulation results
In this paper, we consider the case with changes in the
discharge air temperature set points(target values): y 55 F for the
first 300 samples, y 60 F for the next 200 samples and
Fig. 8. Neuro-PID controller-chilled water flow rate response
for u3 4 F.
M. Zaheer-uddin, N. Tudoroiu / Energy Conversion and Management
45 (2004) 24052415 2411
-
7/30/2019 Neuro PID Tracking Control Air Discharger
8/11
y 50 F for the last 200 samples. The results of the simulations
subjected to the changes in setpoints and disturbances are
presented in Figs. 58. We consider changes in chilled water
supply
temperature Twiu3 as a disturbance on the DAT system. The
results depicted in Figs. 58 showthe output responses of the system
to the changes in set points by 5 F when a 2 F rise in inletwater
temperature occurs. In the initial 100 s (25 samples) the valve
response (Fig. 6) goes from
a full closed to full open position before it stabilizes. This
suggests that significant changes in setpoints impose a large error
on the controller, thus causing rapid movements of the actuators
over
a short period of time. The control operation is otherwise
stable and tracks the desired set point.In the simulations results
presented here, the set point of 60 F corresponds to almost no
load
conditions. Because of this, the control valve is almost closed
at this set point as shown in Fig. 6.
The sets of responses in Figs. 7 and 8 (with a 4 F rise in
chilled water inlet temperature) showsimilar trends. The effect of
increasing the chilled water temperature can be seen by
comparing
Figs. 5 and 6 (a 2 F change) and 7 and 8 (a 4 F change). Given
that in both Figs. 5 and 7, the setpoints remain the same, it is
apparent from Fig. 8 that a higher water flow rate is needed
tomaintain the same set point when the water temperature is
increased by 4 F compared to the
water flow rates shown in Fig. 6.These figures reveal a good
tracking performance (with zero steady state error), good
transient
behavior, but a 5 F overshoot in output temperature. Also, the
neuro-controller input responses
show periods of transients following the disturbance. To
eliminate this situation, we have adapted
Fig. 9. New set point trajectory for the neuro-PID tracking
controller.
2412 M. Zaheer-uddin, N. Tudoroiu / Energy Conversion and
Management 45 (2004) 24052415
-
7/30/2019 Neuro PID Tracking Control Air Discharger
9/11
a tracking control technique presented by Anderson and Moore
[10]. In the technique used, wehave built a neuro-PID tracking
controller that tracks a reference trajectory such as the one
shown in Fig. 9. The simulation results from this neuro-PID
tracking controller are depicted inFigs. 10 and 11. It is apparent
that the control input responses are smooth even when a 4 Fchange
in chilled water temperature is imposed as a disturbance on the
system.
The neuro-PID tracking control is useful in minimizing the
overshoot. This is achieved byletting the PID controller track a
given trajectory. The advantage of this technique is that the
steady state time can be chosen a priori to achieve a desired
tracking trajectory. The trackingtrajectory considered in this
paper is shown in Fig. 9. The corresponding DAT responses are
depicted in Fig. 10. The speed of response can be improved by
selecting a trajectory that reachesthe set point faster.
5. Performance evaluation
The magnitude of temperature oscillations in the neuro-control
strategy is somewhat large dueto the fact that the model of the DAT
system is nonlinear. For this reason, the actuator responsesduring
the initial few samples seems to be more oscillatory. We have
addressed this issue by
presenting a tracking solution that represents a new point of
view. The responses from this neuro-PID tracking controller leads
to better performance, reducing the oscillations and the
actuator
Fig. 10. Neuro-PID tracking controller-discharge air temperature
for u3 4 F.
M. Zaheer-uddin, N. Tudoroiu / Energy Conversion and Management
45 (2004) 24052415 2413
-
7/30/2019 Neuro PID Tracking Control Air Discharger
10/11
acts smoothly. This represents a big advantage in practical
applications. Overall, taking intoaccount the fact that for the
neuro-control strategy, the dynamics of the DAT system could
beunknown and the nonlinearity of the actuator is incorporated in
its dynamics, we consider the
neuro-control strategy very useful for tuning the PID
parameters. Experimental work is beingplanned for validating the
control strategy reported in this paper.
6. Conclusion
In this paper, we developed real time DAT control strategies for
tuning the PID gainparameters. The simulation results reveal that
the neuro-PID controller gives good trackingperformance.
Furthermore, the neuro-PID controller structure proposed can be
applied to DAT
systems with unknown dynamics and, consequently, eliminate the
need for extensive identifica-tion. The values obtained for the PID
gain parameters are not unique. They represent only one ofthe
solutions for the triplet among infinitely many possible ones. In
spite of this, this technique
still remains useful for HVAC systems for tuning of the PID gain
parameters. To avoid over-fitting, we have limited the number of
neurons to as few as possible that yield convergence to thedesired
error level, and we cut off the training once that error level was
reached. The proposed
neuro-PID structure gave the best fit for the inputoutput data
set with the smallest standarddeviation error.
Fig. 11. Neuro-PID tracking controller-chilled water flow rate
response for u3 4 F.
2414 M. Zaheer-uddin, N. Tudoroiu / Energy Conversion and
Management 45 (2004) 24052415
-
7/30/2019 Neuro PID Tracking Control Air Discharger
11/11
Acknowledgements
This work was funded by a research grant (OGP 0036380) from the
Natural Sciences and
Engineering Research Council (NSERC) of Canada.
References
[1] Shavit G. Tuning of PID DDC controllers, American Control
Conference, 1994.
[2] Nesler CG. Adaptive control of thermal processes in
buildings. IEEE Control Syst Mag 1986;(August).
[3] Dexter AL, Haves P. A robust self-tuning controller for HVAC
applications. ASHRAE Trans 1989;95(1):4318.
[4] Seem JE. A new pattern recognition adaptive controller. In:
IFAC 13th Triennial World Congress, San Francisco;
1996. p. 1216.
[5] Seem JE. Implementation of a new pattern recognition
adaptive controller developed through optimization.
ASHRAE Trans 1997;103(1).[6] Zaheer-uddin M, Tudoroiu N.
Neuro-models for discharge air temperature system. Energy Convers
Manage
2004;45(6):90110.
[7] Ahn S. Self-tuning PID controller design using neural
networks: intelligent engineering systems through artificial
neural networks. In: Proceedings of the Artificial Neural
Networks in Engineering (ANNIE 93) Conference, vol. 3.
New York: ASME Press; 1993.
[8] Zurada JM. Introduction to artificial neural systems. West
Publishing Company; 1991.
[9] Rojas R. Neural networksa systematic introduction. Berlin,
New York: Springer-Verlag; 1996.
[10] Anderson BDO, Moore JB. Optimal control: linear quadratic
methods. Prentice-Hall; 1990.
M. Zaheer-uddin, N. Tudoroiu / Energy Conversion and Management
45 (2004) 24052415 2415