Embed Size (px)
Citation preview

•
NEW MODELS AND THEORIES OFDYNAMIC FRICTION
J. T. ODEN and J. A. C. MARTINSTexas Institute for Computational Mechanics
Department of Aerospace Engineering andEngineering Mechanics
The University of Texas at Austin
Abstract. Normal contact and friction models appropriate for a classof dry dynamic friction problems are discussed. Computational resultsobtained using these models indicate that they are capable of describingimportant dynamic friction phenomena.
INTRODUCTION
Classical notions of dynamic friction between sliding rigid bodiesare described in every introductory textbook on mechanics and haveinfluenced experimental work on dynamic friction for most of thiscentury: SUcUn.g 06 bOcUeA -i.n. e.qlLi.UbJUwn wh-i.ch touch on. a. contact.6U1t.6a.ce. be.g-i.YL6 whe.n. the. 6JUction. 60Jt.ce. F 1l.e.a.cheA a. CIl.-i.t-i.ca1. va1.ue.pIlopolltion.ai. to the. n.et n.oJt.ma1.601l.ce. N, the. COYL6ta.nt 06 Pll.opolltion.a1.-i.tyµs bun.g the. .6tatic coe.66-i.c-i.e.nt 06 6JUctiOn.i on.ce. .6i..-i.cUn.gbe.g-i.YL6, the.61l-i.ctio n. 601l.ce. a.tta.-i.YL6 a. va.lue. F = µkN, whe.ll.e. Oil iA the. une.ticcoe.66-i.c-i.e.nt 06 6ll-i.ction. a.n.d µk > µs'
Unfortunately, the results of literally hundreds of experimentsspanning nearly a half-century have failed to establish that such afriction law is valid locally, at points of contact of metallic bodies.The fact is that this classical notion of dry dynamic friction is,at best, a rough global law which applies only to gross forces developedon essentially rigid bodies. Significant experimental and theoreticalresults indicate that to capture the essential features of dynamicfriction in a continuum model it is necessary to model adequately thenormal compliance of the contact interface. Once this is done, a modeldynamic friction acceptable for describing such phenomena as stick-slipmotion and friction damping, can be derived which involves a constant

coefficient of friction µ = µs'
In [I], a critique and assessment of a large volume of experimentalliterature is given and used as a basis for proposals of nonlinearconstitutive laws of the normal deformation of metallic interfaces.These laws are complemented with tangential friction conditions toproduce an interface model for studying a class of dynamic frictionproblems.
In the present note, we review features of o.ur dynamic frictionmodel and present variational principles for contact problems in elasto-dynamics in which nonlinear contact-friction laws are in force. Inaddition, finite element models and algorithms are described for thenumerical solution of problems of friction damping and stick-slip motion.Also, conclusions drawn from numerical experiments are summarized.
2. NORMAL CONTACT AND FRICTION MODELS
We consider a metallic body B is contact with a second body B'along a contact surface rC of B. Without loss in generality, we canassume for our purposes that B' is rigid, but it can slide relativeto B with some prescribed velocity tiT' The actual surface of B isa a rough interface composed of oxides, impurities, work-hardenedmaterial, etc., and is of a different constitution than that of theparent material of which B is composed. The boundary surface r c ofB can be defined as the surface passing through the highest asperities(or some average asperity height) and its orientation is defiend bya unit vector!! normal to fC' The initial gap g between Band B' isthe distance along ~ between the highest asperities of B and the flatsurface of B'. If to and t denote the thickness of the interfacebefore and after deformation, respectively, and if Un = u·n is thecomponent of the displacement of material particles on rC in the direc-tion of n then the approach a of the .material contact surfaces isdefined by
a = t - t = (u - g)o n +
where (.) = max (0,·). If ~T = u - u n denotes the tangential+ n -
velocity of particle~ on rC' then the relative sliding velocity betweenBand B' is equal of ~T - ~T'
Based on our earlier study [I], we consider cases in which thefollowing normal and frictional conditions hold:
C1nR.m n •c (u-g) n + b (u-g) u
n + n + n 1

,.
un > g =>
laT.I<~ I (1)
cT(u - g) withn +
lOTI <~ . .
cT(u - g) ~-U =0n + _ _T
lOTI =" ~
cT(u - g) there exists A > 0n +
such that
Here an' oT are normal and tangential stress components (an = Oijninj,
etc.) and en' em mn, bn, Rn are materials constants. Detailed inter-
pretations and justification of these results "are given in [I). Thisfriction law is a slight generalization of Coulomb's law with acoefficient friction of µ = (cT/c ~/mn)'la la,a= (m-/m ) - I.
n n T n3. VARIATIONAL PRINCIPLE FOR DYNAMIC FRICTION
The following variational principle holdsproblems in which condi tions (l) hold and body(with 0ij = Eijk.f..Ek.f..'Ek.f..= (Uk,l + U.e.,k) (2):
for dynamic frictionB is linearly elastic
Find a displacement field U = U (x,t) in a space V of admissibledisplacements such that
(pu(t) v - ~(t) + a(u(t), v - ~(t»- g - -
+(P(u(t), ~(t», v - ~(t» + j(u(t), v)
- j(u(t), u(t» ~ f(t), v - ~(t»(2)
for all v in V
Here (.,.)denotes duality-paring on V' x V (e.g.(~,y)=f~.~ dx, with
n the interior of Band dx = dx 1 dx2dx3 is a volume element), v is
an arbitrary virtual displacement, a(·,·) is the vertical work,
a(u,v) =
j(u,v)
f f""l E .. k! uk l v. j dxa ~J , ~,

and .(t'~-~T)is the vertical work of the external forces.
V = {~ = (vl,v2,v3) I vi t HI(n),
Here,
vi = 0 on rDc an}We must also impose initial conditions, ~(O) = ~O' ~(O) = ~l' The
fact that dynamic friction leads to a variational inequality ratherthan an equality is due to the presence of the non-differentiablefrictional functional j(., .). In practice, we use standard regulari-zation ideas and replace j by a differentiable approximation j,
Edepending on a positive parameter £
4. FINITE ELEMENT MODELS AND NUMERICAL RESULTS
:(0) = ~O ' ~(O)
finite element approximations of (2) (withto a discrete dynamical system of the form
]Standard conforming
replaced by j) leadE
M r + K r + p(r,r) + J(r,r) = F
j
Here t1 and 1< are the usual mass and stiffness matrices, .ris a vector of nonlinear functions of the nodal displacement vectorf and velocity vector !, -!. is the nonlinear friction-dampingmatrix arising from the friction functional j (or j ), and F
Eis the force vector.
We employ both central difference temporal approximations of(3) with a lumped mass matrix and an implicit Newmark-a method tostudy transient dynamic problems. Our results indicate that ourfriction model is capable of describing a variety of dynamical fric-tional phenomena, including stick-slip motion, friction damping,and steady sliding friction.
Because of spaceprincipal conclusions
limitations, we shalldrawn from a series of
record here only thenumerical experiments.
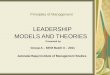
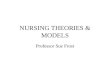
We developed a two-dimensional finite-element model of an elasticblock resting on a moving belt while being restrained by a linearspring, as indica ted in Fig. I (the model consisted of a 4 x 4 meshof nine-node biquadratic elements). Equations (3) were integratedfor a choice of parameters and material constants representative offriction experiments and for a given belt velocity. Computed resultsindicate that the body maintains a stable sliding equ!librium positionfor given t.i for a coefficient of friction µ sufficiently, small. Asµ is increa""sed, for fixed ~, a dynamic situation is reached in whichsmall oscillations about an equilibrium position occur. By linearizingdynamical equations about an equilibrium position and performing a

on the contact surface yroducesforce which in turn produce a
standard eigenvalue analysis of the resulting system, one can detectthe onset of such oscillations by the emergence of imaginery eigenvaluesfor sufficiently large µ. If µ is increased further, eigenvalues withpositive real parts are obtained which signal dynamic instability,is manifested in rotational and normal oscillations of growing magnitudeand is associated with stick-slip motion.
In particular, other observations derived from our numerical resultsfor the case of µ sufficiently large are:
•The variation of the normal forcechanges in the sliding frictiontangential oscillation;
·The tangential oscillation may then become sufficiently large that,for small values of the belt velocity, the points of the body onthe contact surface attain the bel t velocity and the body sticksfor short intervals of time;
·With the increase in magnitude of the normal oscillations, actualnormal jumps of the body may occur;
•The repeated periods of adhesion have the result of decreasingthe average value of the friction force on the contact surfaceand, due to the absence of equilibrium with the restoring forceon the tangential spring, the tangential displacement UGXof thecenter of mass decreases;
It follows that for given geometry and material data, one of thetwo following situations may occur:
(a)for values of x-velocity component UGXof the center of mass largerthan some critical value, the normal, rotational and tangentialoscillations evolve to .what appears to be a steady oscillationwith successive periods of adhesion and sliding, the average valuesof the friction force and of the spring elongation being smallerthan those corresponding to the steady sliding equilibrium position.
(b)for values of UGXlower than the critical value, and at a suffi-ciently small value of the spring elongation, the normal (androtational) damping is able to damp out the normal (and rotational)oscillation and the body sticks, since the restoring force of thespring is then smaller than the maximumavailable friction force.
Thu..6, mon-i.toll-i.ng the. .6pll-i.n.g e.!on.ga.t.tOYL6, a.6 iA 06te.n. done. -i.n61l-i.ction e.x.peMlne.nt.6, Ca.6e. Ia.l would be. pe.ll.cuve.d a.6 a.n a.ppa/le.nti..y.6mooth .6i..-i.cUn.g wilh a. coe.66-i.c-i.e.nt 06 une.tic 6ll-i.ction. .6ma.Ue.Il. tha.nthe. coe.66-i.c-i.e.nt 06 .6tatic 6ll-i.ction. a.n.d ca.6e. Ib) would be. pe.ll.cuve.da.6 .6uch.-.6Up moUon..

.-
Acknowledgement: The support of the Air Force Office of ScientificResearch through Contract F4950-84-0024 is gratefully acknowledged.
Reference
I. Oden, J. T. and Martins, J. A. C., Models and Computational Methodsfor Dynamic Friction, Computer Methods in Applied Mechanics andEngineering, (to appear).
G
Figure I

· .
G
Figure I