Embed Size (px)
Citation preview

Chapter Eight
Non-linear oscillations
and phase space
KEY FEATURES
The key features of this chapter are the use of perturbation theory to solve weakly nonlinear
problems, the notion of phase space, the Poincare–Bendixson theorem, and limit cycles.
In reality, most oscillating mechanical systems are governed by nonlinear equations.
The linear oscillation theory developed in Chapter 5 is generally an approximation which
is accurate only when the amplitude of the oscillations is small. Unfortunately, nonlinear
oscillation equations do not have nice exact solutions as their linear counterparts do, and
this makes the nonlinear theory difficult to investigate analytically.
In this chapter we describe two different analytical approaches, each of which is suc
cessful in its own way. The first is to use perturbation theory to find successive cor
rections to the linear theory. This gives a more accurate solution than the linear theory
when the nonlinear terms in the equation are small. However, because the solution is
close to that predicted by the linear theory, new phenomena associated with nonlinearity
are unlikely to be discovered by perturbation theory! The second approach involves the
use of geometrical arguments in phase space. This has the advantage that the nonlinear
effects can be large, but the conclusions are likely to be qualitative rather than quantita
tive. A particular triumph of this approach is the Poincare–Bendixson theorem, which
can be used to prove the existence of limit cycles, a new phenomenon that exists only in
the nonlinear theory.
8.1 PERIODIC NON-LINEAR OSCILLATIONS
Most oscillating mechanical systems are not exactly linear but are approximately
linear when the oscillation amplitude is small. In the case of a body on a spring, the
restoring force might actually have the form
S = m2x + m�x3, (8.1)
which is approximated by the linear formula S = m2x when the displacement x is small.
The new constant � is a measure of the strength of the nonlinear effect. If � < 0, then

8.1 Periodic non-linear oscillations 195
E
V
xa−a
maxa
Vmax
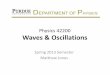
FIGURE 8.1 Existence of periodic oscillations for the quartic
potential energy V = 12
m2x2 + 14
m�x4 with � < 0.
S is less than its linear approximation and the spring is said to be softening as x increases.
Conversely, if � > 0, then the spring is hardening as x increases. The formula (8.1) is
typical of nonlinear restoring forces that are symmetrical about x = 0. If the restoring
force is unsymmetrical about x = 0, the leading correction to the linear case will be a
term in x2.
Existence of non-linear periodic oscillations
Consider the free undamped oscillations of a body sliding on a smooth horizontal table∗
and connected to a fixed point of the table by a spring whose restoring force is given by
the cubic formula (8.1). In rectilinear motion, the governing equation is then
d2x
dt2+ 2x + �x3 = 0, (8.2)
which is Duffing’s equation with no forcing term (see section 8.5). The existence of
periodic oscillations can be proved by the energy method described in Chapter 6. The
restoring force has potential energy
V = 12m2x2 + 1
4m�x4,
so that the energy conservation equation is
12mv2 + 1
2m2x2 + 1
4m�x4 = E,
where v = x . The motion is therefore restricted to those values of x that satisfy
12m2x2 + 1
4m�x4 ≤ E,
∗ Would the motion be the same (relative to the equilibrium position) if the body were suspended vertically
by the same spring?

196 Chapter 8 Non-linear oscillations and phase space
with equality when v = 0. Figure 8.1 shows a sketch of V for a softening spring (� < 0).
For each value of E in the range 0 < E < Vmax, the particle oscillates in a symmetrical
range −a ≤ x ≤ a as shown. Thus oscillations of any amplitude less than amax (=/|�|1/2) are possible. For a hardening spring, oscillations of any amplitude whatsoever
are possible.
Solution by perturbation theory
Suppose then that the body is performing periodic oscillations with amplitude a. In order
to reduce the number of parameters, we nondimensionalise equation (8.2). Let the dimen-
sionless displacement X be defined by x = a X . Then X satisfies the equation
1
2
d2 X
dt2+ X + ǫX3 = 0, (8.3)
with the initial conditions X = 1 and d X/dt = 0 when t = 0. The dimensionless
parameter ǫ, defined by
ǫ =a2�
2, (8.4)
is a measure of the strength of the nonlinearity. Equation (8.3) contains ǫ as a parameter
and hence so does the solution. A major feature of interest is how the period τ of the
motion varies with ǫ.
The nonlinear equation of motion (8.3) cannot be solved explicitly but it reduces
to a simple linear equation when the parameter ǫ is zero. In these circumstances, one
can often find an approximate solution to the nonlinear equation valid when ǫ is small.
Equations in which the nonlinear terms are small are said to be weakly nonlinear and
the solution technique is called perturbation theory. There is a well established theory
of such perturbations. The simplest case is as follows:
Regular perturbation expansion
If the parameter ǫ appears as the coefficient of any term of an ODE that is not the
highest derivative in that equation, then, when ǫ is small, the solution corresponding
to fixed initial conditions can be expanded as a power series in ǫ.
This is called a regular perturbation expansion∗ and it applies to the equation (8.3).
It follows that the solution X (t, ǫ) can be expanded in the regular perturbation series
X (t, ǫ) = X0(t) + ǫX1(t) + ǫ2 X2(t) + · · · . (8.5)
∗ The case in which the small parameter multiplies the highest derivative in the equation is called a singular
perturbation. For experts only!

8.1 Periodic non-linear oscillations 197
The standard method is to substitute this series into the equation (8.3) and then to try to
determine the functions X0(t), X1(t), X2(t), . . . . In the present case however, this leads
to an unsatisfactory result because the functions X1(t), X2(t), . . . , turn out to be non-
periodic (and unbounded) even though the exact solution X (t, ǫ) is periodic!∗ Also, it is
not clear how to find approximations to τ from such a series.
This difficulty can be overcome by replacing t by a new variable s so that the solution
X (s, ǫ) has period 2π in s whatever the value of ǫ. Every term of the perturbation series
will then also be periodic with period 2π . This trick is known as Lindstedt’s method.
Lindstedt’s method
Let ω(ǫ) (= 2π/τ(ǫ)) be the angular frequency of the required solution of equation (8.3).
Now introduce a new independent variable s (the dimensionless time) by the equation
s = ω(ǫ)t . Then X (s, ǫ) satisfies the equation
(
ω(ǫ)
)2
X ′′ + X + ǫX3 = 0 (8.6)
with the initial conditions X = 1 and X ′ = 0 when s = 0. (Here ′ means d/ds.) We now
seek a solution of this equation in the form of the perturbation series
X (s, ǫ) = X0(s) + ǫX1(s) + ǫ2 X2(s) + · · · . (8.7)
which is possible when ǫ is small. By construction, this solution must have period 2π for
all ǫ from which it follows that each of the functions X0(s), X1(s), X2(s), . . . must also
have period 2π . However we have paid a price for this simplification since the unknown
angular frequency ω(ǫ) now appears in the equation (8.6); indeed, the function ω(ǫ) is
part of the answer to this problem! We must therefore also expand ω(ǫ) as a perturbation
series in ǫ. From equation (8.3), it follows that ω(0) = so we may write
ω(ǫ)
= 1 + ω1ǫ + ω2ǫ
2 + · · · , (8.8)
where ω1, ω2, . . . are unknown constants that must be determined along with the functions
X0(s), X1(s), X2(s), . . . .
On substituting the expansions (8.7) and (8.8) into the governing equation (8.6) and
its initial conditions, we obtain:
(1 + ω1ǫ + ω2ǫ2 + · · · )2(X ′′
0 + ǫX ′′1 + ǫ2 X ′′
2 + · · · ) +
(X0 + ǫX1 + ǫ2 X2 + · · · ) + ǫ(X0 + ǫX1 + ǫ2 X2 + · · · )3 = 0,
∗ This ‘paradox’ causes great bafflement when first encountered, but it is inevitable when the period τ of
the motion depends on ǫ, as it does in this case. To have a series of nonperiodic terms is not wrong,
as is sometimes stated. However, it is certainly unsatisfactory to have a nonperiodic approximation to a
periodic function.

198 Chapter 8 Non-linear oscillations and phase space
with
X0 + ǫX1 + ǫ2 X2 + · · · = 1,
X ′0 + ǫX ′
1 + ǫ2 X ′2 + · · · = 0,
when s = 0. If we now equate coefficients of powers of ǫ in these equalities, we obtain a
succession of ODEs and initial conditions, the first two of which are as follows:
From coefficients of ǫ0, we obtain the zero order equation
X ′′0 + X0 = 0, (8.9)
with X0 = 1 and X ′0 = 0 when s = 0.
From coefficients of ǫ1, we obtain the first order equation
X ′′1 + X1 = −2ω1 X ′′
0 − X30, (8.10)
with X1 = 0 and X ′1 = 0 when s = 0.
This procedure can be extended to any number of terms but the equations rapidly become
very complicated. The method now is to solve these equations in order; the only sticking
point is how to determine the unknown constants ω1, ω2, . . . that appear on the right sides
of the equations. The solution of the zero order equation and initial conditions is
X0 = cos s (8.11)
and this can now be substituted into the first order equation (8.10) to give
X ′′1 + X1 = 2ω1 cos s − cos3 s
= 14(8ω1 − 3) cos s + 1
4cos 3s, (8.12)
on using the trigonometric identity cos 3s = 4 cos3 s − 3 cos s. This equation can now
be solved by standard methods. The particular integral corresponding to the cos 3s on the
right is −(1/8) cos 3s, but the particular integral corrsponding to the cos s on the right is
(1/2)s sin s, since cos s is a solution of the equation X ′′ + X = 0. The general solution of
the first order equation is therefore
X1 =(
ω1 − 38
)
s sin s − 132
cos 3s + A cos s + B sin s,
where A and B are arbitrary constants. Observe that the functions cos s, sin s and cos 3s
are all periodic with period 2π , but the term s sin s is not periodic. Thus, the coefficient
of s sin s must be zero, for otherwise X1(s) would not be periodic, which we know it must
be. Hence
ω1 =3
8, (8.13)

8.2 The phase plane ((x1, x2)–plane) 199
which determines the first unknown coefficient in the expansion (8.8) of ω(ǫ). The solu
tion of the first order equation and initial conditions is then
X1 =1
32(cos s − cos 3s) . (8.14)
We have thus shown that, when ǫ is small,
ω
= 1 +
3
8ǫ + O
(
ǫ2)
,
and
X = cos s +ǫ
32(cos s − cos 3s) + O
(
ǫ2)
,
where s =(
1 + 38ǫ + O
(
ǫ2)
)
t .
Results
When ǫ (= a2�/2) is small, the period τ of the oscillation of equation (8.2) with
amplitude a is given by
τ =2π
ω=
2π
(
1 +3
8ǫ + O
(
ǫ2)
)−1
=2π
(
1 −3
8ǫ + O
(
ǫ2)
)
(8.15)
and the corresponding displacement x(t) is given by
x = a[
cos s +ǫ
32(cos s − cos 3s) + O
(
ǫ2)]
, (8.16)
where s =(
1 + 38ǫ + O
(
ǫ2)
)
t .
This is the approximate solution correct to the first order in the small parameter ǫ.
More terms can be obtained in a similar way but the effort needed increases exponentially
and this is best done with computer assistance (see Problem 8.15).
These formulae apply only when ǫ is small, that is, when the non- linearity in the
equation has a small effect. Thus we have laboured through a sizeable chunk of mathe
matics to produce an answer that is only slightly different from the linear case. This sad
fact is true of all regular perturbation problems. However, in nonlinear mechanics, one
must be thankful for even modest successes.
8.2 THE PHASE PLANE ((x1, x2)–plane)
The second approach that we will describe could not be more different from per
turbation theory. It makes use of qualitative geometrical arguments in the phase space of
the system.

200 Chapter 8 Non-linear oscillations and phase space
Systems of first order ODEs
The notion of phase space springs from the theory of systems of first order ODEs.
Such systems are very common and need have no connection with classical mechanics. A
standard example is the predatorprey system of equations
x1 = ax1 − bx1x2,
x2 = bx1x2 − cx2,
which govern the population density x1(t) of a prey and the population density x2(t) of its
predator. In the general case there are n unknown functions satisfying n first order ODEs,
but here we will only make use of two unknown functions x1(t), x2(t) that satisfy a pair
of first order ODEs of the form
x1 = F1(x1, x2, t),
x2 = F2(x1, x2, t).(8.17)
Just to confuse matters, a system of ODEs like (8.17) is called a dynamical system,
whether it has any connection with classical mechanics or not! In the predatorprey
dynamical system, the function F1 = ax1 − bx1x2 and the function F2 = bx1x2 − cx2.
In this case F1 and F2 have no explicit time dependence. Such systems are said to be
autonomous; as we shall see, more can be said about the behaviour of autonomous sys
tems.
Definition 8.1 Autonomous system A system of equations of the form
x1 = F1(x1, x2),
x2 = F2(x1, x2),(8.18)
is said to be autonomous.
The phase plane
The values of the variables x1, x2 at any instant can be represented by a point in the
(x1, x2)plane. This plane is called the phase plane∗ of the system. A solution of the
system of equations (8.17) is then represented by a point moving in the phase plane. The
path traced out by such a point is called a phase path† of the system and the set of all
phase paths is called the phase diagram. In the predator–prey problem, the variables x1,
x2 are positive quantities and so the physically relevant phase paths lie in the first quadrant
of the phase plane. It can be shown that they are all closed curves! (See Problem 8.10).
Phase paths of autonomous systems
The problem of finding the phase paths is much easier when the system is autonomous.
The method is as follows:
∗ In the general case with n unknowns, the phase space is ndimensional.† Also called an orbit of the system.

8.2 The phase plane ((x1, x2)–plane) 201
FIGURE 8.2 Phase diagram for the system
dx1/dt = x2 − 1, dx2/dt = −x1 + 2. The
point E(2, 1) is an equilibrium point of the
system.
E
x1
x2
Example 8.1 Finding phase paths for an autonomous system
Sketch the phase diagram for the autonomous system of equations
dx1
dt= x2 − 1,
dx2
dt= −x1 + 2.
Solution
The phase paths of an autonomous system can be found by eliminating the time
derivatives. The path gradient is given by
dx2
dx1
=dx2/dt
dx1/dt
= −x1 − 2
x2 − 1
and this is a first order separable ODE satisfied by the phase paths. The general
solution of this equation is
(x1 − 2)2 + (x2 − 1)2 = C
and each (positive) choice for the constant of integration C corresponds to a phase
path. The phase paths are therefore circles with centre (2, 1); the phase diagram is
shown in Figure 8.2.
The direction in which the phase point progresses along a path can be deduced
by examining the signs of the right sides in equations (8.18). This gives the signs of
x1 and x2 and hence the direction of motion of the phase point.
When the system is autonomous, one can say quite a lot about the general nature of
the phase paths without finding them. The basic result is as follows:
Theorem 8.1 Autonomous systems: a basic result Each point of the phase space
of an autonomous system has exactly one phase path passing through it.
Proof. Let (a, b) be any point of the phase space. Suppose that the motion of the phase point (x1, x2)
satisfies the equations (8.18) and that the phase point is at (a, b) when t = 0. The general theory of ODEs

202 Chapter 8 Non-linear oscillations and phase space
then tells us that a solution of the equations (8.18), that satisfies the initial conditions x1 = a, x2 = b
when t = 0, exists and is unique. Let this solution be {X1(t), X2(t)}, which we will suppose is defined
for all t , both positive and negative. This phase path certainly passes through the point (a, b) and we must
now show that there is no other. Suppose then that there is another solution of the equations in which the
phase point is at (a, b) when t = τ , say. This motion also exists and is uniquely determined and, in the
general case, would not be related to {X1(t), X2(t)}. However, for autonomous systems, the right sides of
equations (8.18) are independent of t so that the two motions differ only by a shift in the origin of time. To
be precise, the new motion is simply {X1(t − τ), X2(t − τ)}. Thus, although the two motions are distinct,
the two phase points travel along the same path with the second point delayed relative to the first by the
constant time τ . Hence, although there are infinitely many motions of the phase point that pass through the
point (a, b), they all follow the same path. This proves the theorem.
Some important deductions follow from this basic result.
Phase paths of autonomous systems
• Distinct phase paths of an autonomous system do not cross or touch each other.
• Periodic motions of an autonomous system correspond to phase paths that are
simple∗ closed loops.
Figure 8.2 showsthe phase paths of an autonomous system. For this system, all of the
phase paths are simple closed loops and so every motion is periodic. An exception occurs
if the phase point is started from the point (2, 1). In this case the system has the constant
solution x1 = 2, x2 = 1 so that the phase point never moves; for this reason, the point
(2, 1) is called an equilibrium point of the system. In this case, the ‘path’ of the phase
point consists of the single point (2, 1). However, this still qualifies as a path and the
above theory still applies. Consequently no ‘real’ path may pass through an equilibrium
point of an autonomous system.†
8.3 THE PHASE PLANE IN DYNAMICS ( (x, v)–plane )
The above theory seems unconnected to classical mechanics since dynamical
equations of motion are second order ODEs. However, any second order ODE can be
expressed as a pair of first order ODEs. For example, consider the general linear oscilla
tor equation
d2x
dt2+ 2K
dx
dt+ 2x = F(t). (8.19)
If we introduce the new variable v = dx/dt , then
dv
dt+ 2kv + 2x = F(t).
∗ A simple curve is one that does not cross (or touch) itself (except possibly to close).† It may appear from diagrams that phase paths can pass through equilibrium points. This is not so. Such
a path approaches arbitrarily close to the equilibrium point in question, but never reaches it!

8.3 The phase plane in dynamics ((x, v)–plane) 203
x
v
x x
vv
FIGURE 8.3 Typical phase paths for the simple harmonic oscillator equation. Left: No damping.
Centre: Subcritical damping. Right: Supercritical damping.
It follows that the second order equation (8.19) is equivalent to the pair of first order
equations
dx
dt= v,
dv
dt= F(t) − 2kv − 2x .
We may now apply the theory we have developed to this system of first order ODEs,
where the phase plane is now the (x, v)plane. It is clear that driven motion leads to
a nonautonomous system because of the presence of the explicit time dependence of
F(t); undriven motion (in which F(t) = 0) leads to an autonomous system. It is also
clear that equilibrium points in the (x, v)plane lie on the xaxis and correspond to the
ordinary equilibrium positions of the particle.
The form of the phase paths for the undriven SHO equation
d2x
dt2+ 2K
dx
dt+ 2x = 0
depends on the parameters K and . We could find these paths by the method used in
Example 8.1, but there is no point in doing so since we have already solved the equation
explicitly in Chapter 5. For instance, when K = 0, the general solution is given by
x = C cos(t − γ ),
from which it follows that
v =dx
dt= −C sin(t − γ ).
The phase paths in the (x, v)plane are therefore similar ellipses centred on the origin,
which is an equilibrium point. This, and two typical cases of damped motion, are shown
in Figure 8.3. In the presence of damping, the phase point tends to the equilibrium point
at the origin as t → ∞. Although the equilibrium point is never actually reached, it is
convenient to say that these paths ‘terminate’ at the origin.

204 Chapter 8 Non-linear oscillations and phase space
x
v
FIGURE 8.4 The phase diagram for the undamped Duffing equation with a
softening spring.
Example 8.2 Phase diagram for equation d2x/dt2 + 2x + �x3 = 0
Sketch the phase diagram for the nonlinear oscillation equation
d2x/dt2 + 2x + �x3 = 0,
when � < 0 (the softening spring).
Solution
This equation is equivalent to the pair of first order equations
dx
dt= v,
dv
dt= −2x − �x3,
which is an autonomous system. The phase paths satisfy the equation
dv
dx= −
2x + �x3
v,
which is a first order separable ODE whose general solution is
v2 = C − 2x2 − 12�x4,
where C is a constant of integration. Each positive value of C corresponds to a phase
path. The phase diagram for the case � < 0 is shown in Figure 8.4. There are three
equilibrium points at (0, 0), (±/|�|1/2, 0). The closed loops around the origin
correspond to periodic oscillations of the particle about x = 0. Such oscillations can
therefore exist for any amplitude less than /|�|1/2; this confirms the prediction of
the energy argument used earlier. Outside this region of closed loops, the paths are
unbounded and correspond to unbounded motions of the particle. These two regions
of differing behaviour are separated by the dashed paths (known as separatrices) that
‘terminate’ at the equilibrium points (±/|�|1/2, 0).

8.4 Poincare–Bendixson theorem: limit cycles 205
x1
x2
x2x2
x2
x1x1
x1
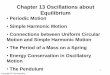
FIGURE 8.5 The Poincare–Bendixson theorem. Any bounded phase path of a plane
autonomous system must either close itself (top left), terminate at an equilibrium
point (top right), or tend to a limit cycle (normal case bottom left, degenerate case
bottom right).
8.4 POINCARE–BENDIXSON THEOREM: LIMIT CYCLES
In the autonomous systems we have studied so far, those phase paths that are
bounded either (i) form a closed loop (corresponding to periodic motion), or (ii) ‘termi
nate’ at an equilibrium point (so that the motion dies away). Figure 8.3 shows examples
of this. The famous Poincare–Bendixson theorem∗ which is stated below, says that there
is just one further possibility.
Poincare–Bendixson theorem
Suppose that a phase path of a plane autonomous system lies in a bounded
domain of the phase plane for t > 0. Then the path must either
• close itself, or
• terminate at an equilibrium point as t → ∞, or
• tend to a limit cycle (or a degenerate limit cycle) as t → ∞.
A proper proof of the theorem is long and difficult (see Coddington & Levinson [9]).
∗ After Jules Henri Poincare (1854–1912) and Ivar Otto Bendixson (1861–1935). The theorem was first
proved by Poincare but a more rigorous proof was given later by Bendixson.

206 Chapter 8 Non-linear oscillations and phase space
The third possibility is new and needs explanation. A limit cycle is a periodic motion
of a special kind. It is isolated in the sense that nearby phase paths are not closed but are
attracted towards the limit cycle∗ ; they spiral around it (or inside it) getting ever closer, as
shown in Figure 8.5 (bottom left). The degenerate limit cycle shown in Figure 8.5 (bottom
right) is an obscure case in which the limiting curve is not a periodic motion but has one
or more equilibrium points actually on it. This case is often omitted in the literature, but
it definitely exists!
Proving the existence of periodic solutions
The Poincare–Bendixson theorem provides a way of proving that a plane autonomous
system has a periodic solution even when that solution cannot be found explicitly. If a
phase path can be found that cannot escape from some bounded domain D of the phase
plane, and if D contains no equilibrium points, then Poincare–Bendixson implies that the
phase path must either be a closed loop or tend to a limit cycle. In either case, the system
must have a periodic solution lying in D. The method is illustrated by the following
examples.
Example 8.3 Proving existence of a limit cycle
Prove that the autonomous system of ODEs
x = x − y − (x2 + y2)x,
y = x + y − (x2 + y2)y,
has a limit cycle.
Solution
This system clearly has an equilibrium point at the origin x = y = 0, and a little
algebra shows that there are no others. Although we have not proved this result, it
is true that any periodic solution (simple closed loop) in the phase plane must have
an equilibrium point lying inside it. In the present case, it follows that, if a periodic
solution exists, then it must enclose the origin. This suggests taking the domain D to
be the annular region between two circles centred on the origin.
It is convenient to express the system of equations in polar coordinates r , θ . The
transformed equations are (see Problem 8.5)
r =x1 x1 + x2 x2
r, θ =
x1 x2 − x2 x1
r2,
where x1 = r cos θ and x2 = r sin θ . In the present case, the polar equations take the
simple form
r = r(1 − r2), θ = 1.
∗ This actually describes a stable limit cycle, which is the only kind likely to be observed.

8.4 Poincare–Bendixson theorem: limit cycles 207
These equations can actually be solved explicitly, but, in order to illustrate the method,
we will make no use of this fact. Let D be the annular domain a < r < b, where
0 < a < 1 and b > 1. On the circle r = b, r = b(1 − b2) < 0. Thus a phase point
that starts anywhere on the outer boundary r = b enters the domain D. Similarly, on
the circle r = a, r = a(1 − a2) > 0 and so a phase point that starts anywhere on the
inner boundary r = a also enters the domain D. It follows that any phase path that
starts in the annular domain D can never leave. Since D is a bounded domain with no
equilibrium points within it or on its boundaries, it follows from Poincare–Bendixson
that any such path must either be a simple closed loop or tend to a limit cycle. In
either case, the system must have a periodic solution lying in the annulus a < r < b.
We can say more. Phase paths that begin on either boundary of D enter D and
can never leave. These phase paths cannot close themselves (that would mean leaving
D) and so can only tend to a limit cycle. It follows that the system must have (at least
one) limit cycle lying in the domain D. [The explicit solution shows that the circle
r = 1 is a limit cycle and that there are no other periodic solutions.]
Not all examples are as straightforward as the last one. Often, considerable ingenuity
has to be used to find a suitable domain D. In particular, the boundary of D cannot always
be composed of circles. Most readers will find our second example rather difficult!
Example 8.4 Rayleigh’s equation has a limit cycle
Show that Rayleigh’s equation
x + ǫ x(
x2 − 1)
+ x = 0,
has a limit cycle for any positive value of the parameter ǫ.
Solution
Rayleigh’s equation arose in his theory of the bowing of a violin string. In the context
of particle oscillations however, it corresponds to a simple harmonic oscillator with a
strange damping term. When |x | > 1, we have ordinary (positive) damping and the
motion decays. However, when |x | < 1, we have negative damping and the motion
grows. The possibility arises then of a periodic motion which is positively damped on
some parts of its cycle and negatively damped on others. Somewhat surprisingly, this
actually exists.
Rayleigh’s equation is equivalent to the autonomous system of ODEs
x = v,
v = −x − ǫv(
v2 − 1)
,(8.20)
for which the only equilibrium position is at x = v = 0. It follows that, if there is a
periodic solution, then it must enclose the origin. At first, we proceed as in the first
example. In polar form, the equations (8.20) become
r = −ǫr sin2 θ(
r2 sin2 θ − 1)
,
θ = −1 − ǫ sin2 θ(
r2 sin2 θ − 1)
.(8.21)

208 Chapter 8 Non-linear oscillations and phase space
A
x
v
A′B ′
1
−1
B
C1
C2
Dα
n
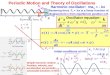
FIGURE 8.6 A suitable domain D to show that Rayleigh’s
equation has a limit cycle.
Let r = c be a circle with centre at the origin and radius less than unity. Then r > 0
everywhere on r = c except at the two points x = ±c, v = 0, where it is zero.
Hence, except for these two points, we can deduce that a phase point that starts on the
circle r = c enters the domain r > c. Fortunately, these exceptional points can be
disregarded. It does not matter if there are a finite number of points on r = c where
the phase paths go the ‘wrong’ way, since this provides only a finite number of escape
routes! The circle r = c thus provides a suitable inner boundary C1 of the domain D.
Sadly, one cannot simply take a large circle to be the outer boundary of D since
r has the wrong sign on those segments of the circle that lie in the strip −1 < v < 1.
This allows any number of phase paths to escape and so invalidates our argument.
However, this does not prevent us from choosing a boundary of a different shape. A
suitable outer boundary for D is the contour C2 shown in Figure 8.6. This contour is
made up from four segments. The first segment AB is part of an actual phase path
of the system which starts at A(−a, 1) and continues as far as B(b, 1). The form
of this phase path can be deduced from equations (8.21). When v(= r sin θ) > 1,
r < 0 and θ < −1, so that the phase point moves clockwise around the origin with
r decreasing. In particular, B must be closer to the origin than A so that b < a, as
shown. Similarly, the segment A′B ′ is part of a second actual phase path that begins at
A′(a, −1). Because of the symmetry of the equations (8.20) under the transformation
x → −x , v → −v, this segment is just the reflection of the segment AB in the origin;
the point B ′ is therefore (−b, −1). The contour is closed by inserting the straight line
segments B A′ and B ′ A.
We will now show that, when C2 is made sufficiently large, it is a suitable outer
boundary for our domain D. Consider first the segment AB. Since this is a phase
path, no other phase path may cross it (in either direction); the same applies to the
segment A′B ′. Now consider the straight segment B A′. Because a > b, the outward
unit normal n shown in Figure 8.6 makes a positive acute angle α with the axis Ox .
Now the ‘phase plane velocity’ of a phase point is
x i + v j = vi −(
ǫv(v2 − 1) + x)
j

8.4 Poincare–Bendixson theorem: limit cycles 209
FIGURE 8.7 The body is supported by a
rough moving belt and is attached to a fixed
post by a light spring.
V
vM
and the component of this ‘velocity’ in the ndirection is therefore
(
vi −(
ǫv(v2 − 1) + x)
j
)
· (cos α i + sin α j)
= v cos α − sin α(
ǫv(v2 − 1) + x)
= −x sin α + v
(
cos α + ǫ sin α(1 − v2)
)
< −b sin α + (1 + ǫ),
for (x, v) on B A′. We wish to say that this expression is negative so that phase points
that begin on B A′ enter the domain D. This is true if the contour C2 is made large
enough. If we let a tend to infinity, then b also tends to infinity and α tends to π/2.
It follows that, whatever the value of the parameter ǫ, we can make b sin α > (1 + ǫ)
by taking a large enough. A similar argument applies to the segment B ′ A. Thus
the contour C2 is a suitable outer boundary for the domain D. It follows that any
phase path that starts in the domain D enclosed by C1 and C2 can never leave. Since
D is a bounded domain with no equilibrium points within it or on its boundaries, it
follows from Poincare–Bendixson that any such path must either be a simple closed
loop or tend to a limit cycle. In either case, Rayleigh’s equation must have a periodic
solution lying in D.
We can say more. Phase paths that begin on either of the straight segments of
the outer boundary C2 enter D and can never leave. These phase paths cannot close
themselves (that would mean leaving D) and so can only tend to a limit cycle. It
follows that Rayleigh’s equation must have (at least one) limit cycle lying in the
domain D. [There is in fact only one.]
A realistic mechanical system with a limit cycle
Finding realistic mechanical systems that exhibit limit cycles is not easy. Driven oscilla
tions are eliminated by the requirement that the system be autonomous. Undamped oscil
lators have bounded periodic motions, and the introduction of damping causes the motions
to die away to zero, not to a limit cycle. In order to keep the motion going, the system
needs to be negatively damped for part of the time. This is an unphysical requirement, but
it can be simulated in a physically realistic system as follows.
Consider the system shown in Figure 8.7. A block of mass M is supported by a rough
horizontal belt and is attached to a fixed post by a light linear spring. The belt is made
to move with constant speed V . Suppose that the motion takes place in a straight line
and that x(t) is the extension of the spring beyond its natural length at time t . Then the

210 Chapter 8 Non-linear oscillations and phase space
Vv
F (v)
x
v
E
FIGURE 8.8 Left: The form of the frictional resistance function G(v). Right: The limit cycle
in the phase plane; E is the unstable equilibrium point.
equation of motion of the block is
Mdv
dt= −M2x − F(v − V ),
where v = dx/dt , M2 is the spring constant, and F(v) is the frictional force that the
belt would exert on the block if the block had velocity v and the belt were at rest; in the
actual situation, the argument v is replaced by the relative velocity v − V . The function
F(v) is supposed to have the form shown in Figure 8.8 (left). Although this choice is
unusual (F(v) is not an increasing function of v for all v), it is not unphysical!
Under the above conditions, the block has an equilibrium position at x =F(V )/(M2). The linearised equation for small motions near this equlibrium position
is given by
Md2x ′
dt2= −M2x ′ − F ′(V )
dx ′
dt,
where x ′ is the displacement of the block from the equilibrium position. If we select the
belt velocity V so that F ′(V ) is negative (as shown in Figure 8.8 (left)), then the effective
damping is negative and small motions will grow. The equilibrium position is therefore
unstable; oscillations of the block about the equlibrium position then do not die out, but
instead tend to a limit cycle. This limit cycle is shown in Figure 8.8 (right). The formal
proof that such a limit cycle exists is similar to that for Rayleigh’s equation. Indeed, this
system is essentially Rayleigh’s model for the bowing of a violin string, where the belt is
the bow, and the block is the string.
Chaotic motions
Another important conclusion from Poincare–Bendixson is that no bounded motion of a
plane autonomous system can exhibit chaos. The phase point cannot just wander about
in a bounded region of the phase plane for ever. It must either close itself, terminate at
an equilibrium point, or tend to a limit cycle and none of these motions is chaotic. In

8.5 Driven non-linear oscillations 211
particular, no bounded motion of an undriven nonlinear oscillator can be chaotic. As we
will see in the next section however, the driven nonlinear oscillator (a nonautonomous
system) can exhibit bounded chaotic motions.
It should be remembered that Poincare–Bendixson applies only to the bounded motion
of plane autonomous systems. If the phase space has dimension three or more, then other
motions, including chaos, are possible.
8.5 DRIVEN NON-LINEAR OSCILLATIONS
Suppose that we now introduce damping and a harmonic driving force into equa
tion (8.2). This gives
d2x
dt2+ k
dx
dt+ 2x + �x3 = F0 cos pt, (8.22)
which is known as Duffing’s equation.
The presence of the driving force F0 cos pt makes this system non-autonomous.
The behaviour of nonautonomous systems is considerably more complex than that of
autonomous systems. Phase space is still a useful aid in depicting the motion of the sys
tem, but little can be said about the general behaviour of the phase paths. In particular,
phase paths can cross each other any number of times, and Poincare–Bendixson does not
apply. Our treatment of driven nonlinear oscillations is therefore restricted to perturbation
theory.
In view of the large number of parameters, it is sensible to nondimensionalise equa
tion (8.22). The dimensionless displacement X is defined by x = (F0/p2)X and the
dimensionless time s by s = pt . The function X (s) then satisfies the dimensionless equa
tion
X ′′ +(
k
p
)
X ′ +(
p
)2
X + ǫX3 = cos s, (8.23)
where the dimensionless parameter ǫ is defined by
ǫ =F2
0 �
6. (8.24)
When ǫ = 0, equation (8.23) reduces to the linear problem. This suggests that, when
ǫ is small, we may be able to find approximate solutions by perturbation theory. The
linear problem always has a periodic solution for X (the driven motion) that is harmonic
with period 2π . Proving the existence of periodic solutions of Duffing’s equation is an
interesting and difficult problem. Here we address this problem for the case in which ǫ
is small, a regular perturbation on the linear problem. To simplify the working we will
suppose that damping is absent; the general features of the solution remain the same. The
governing equation (8.23) then simplifies to
X ′′ +(
p
)2
X + ǫX3 = cos s. (8.25)

212 Chapter 8 Non-linear oscillations and phase space
Initial conditions do not come into this problem. We are simply seeking a family of
solutions X (s, ǫ), parametrised by ǫ, that are (i) periodic, and (ii) reduce to the linear
solution when ǫ = 0. We need to consider first the periodicity of this family of solutions.
In the nonlinear problem, we have no right to suppose that the angular frequency of the
driven motion is equal to that of the driving force, as it is in the linear problem; it could
depend on ǫ. However, suppose that the driving force has minimum period τ0 and that a
family of solutions X (s, ǫ)) of equation (8.25) exists with minimum period τ (= τ(ǫ)).
Then, since the derivatives and powers of X also have period τ , it follows that the left
side of equation (8.25) must have period τ . The right side however has period τ0 and this
is known to be the minimum period. It follows that τ must be an integer multiple of τ0;
note that τ is not compelled to be equal to τ0.∗ However, in the present case, the period
τ(ǫ) is supposed to be a continuous function of ǫ with τ = τ0 when ǫ = 0. It follows
that the only possibility is that τ = τ0 for all ǫ. Thus the period of the driven motion
is independent of ǫ and is equal to the period of the driving force. This argument leaves
open the possibility that other driven motions may exist that have periods that are integer
multiples of τ0. However, even if they exist, they cannot occur in our perturbation scheme.
We therefore expand X (s, ǫ) in the perturbation series
X (t, ǫ) = X0(t) + ǫX1(t) + ǫ2 X2(t) + · · · , (8.26)
and seek a solution of equation (8.25) that has period 2π . It follows that the expansion
functions X0(s), X1(s), X2(s), . . . must also have period 2π . If we now substitute this
series into the equation (8.25) and equate coefficients of powers of ǫ, we obtain a succes
sion of ODEs the first two of which are as follows:
From coefficients of ǫ0:
X ′′0 +
(
p
)2
X0 = cos s. (8.27)
From coefficients of ǫ1:
X ′′1 +
(
p
)2
X1 = −X30. (8.28)
For p �= , the general solution of the zero order equation (8.27) is
X0 =(
p2
2 − p2
)
cos s + A cos(s/p) + B sin(s/p),
where A and B are arbitrary constants. Since X0 is known to have period 2π , it follows
that A and B must be zero unless is an integer multiple of p; we will assume this is not
∗ The fact that τ is the minimum period of X does not neccessarily make it the minimum period of the left
side of equation (8.25).

8.5 Driven non-linear oscillations 213
the case. Then the required solution of the zero order equation is
X0 =(
p2
2 − p2
)
cos s. (8.29)
The first order equation (8.28) can now be written
X ′′1 +
(
p
)2
X1 = −(
p2
2 − p2
)3
cos3 s
= −(
p6
4(2 − p2)3
)
(3 cos s + cos 3s), (8.30)
on using the trigonometric identity cos 3s = 4 cos3 s−3 cos s. Since /p is not an integer,
the only solution of this equation that has period 2π is
X1 = −(
p8
4(2 − p2)3
)
(
3 cos s
2 − p2+
cos 3s
2 − 9p2
)
. (8.31)
Results
When ǫ (= F30 �/p6) is small, the driven response of the Duffing equation (8.22) (with
k = 0) is given by
x =F0
2 − p2
[
cos pt −(
3p6 cos pt
(2 − p2)3+
p6 cos 3pt
(2 − p2)2(2 − 9p2)
)
ǫ + O(
ǫ2)
]
.
(8.32)
This is the approximate solution correct to the first order in the small parameter ǫ.
More terms can be obtained in a similar way but this is best done with computer assistance.
The most interesting feature of this formula is the behaviour of the first order cor
rection term when is close to 3p, which suggests the existence of a super-harmonic
resonance with frequency 3p. Similar ‘resonances’ occur in the higher terms at the fre
quencies 5p, 7p, . . . , and are caused by the presence of the nonlinear term �x3. It should
not however be concluded that large amplitude responses occur at these frequencies.∗ The
critical case in which = 3p is solved in Problem 8.14 and reveals no infinities in the
response.
Sub-harmonic responses and chaos
We have so far left open the interesting question of whether a driving force with minimum
period τ can excite a subharmonic response, that is, a response whose minimum period is
∗ This is a subtle point. Like all power series, perturbation series have a certain ‘radius of convergence’.
When all the terms of the perturbation series are included, ǫ is resticted to some range of values −ǫ0 <
ǫ < ǫ0. What seems to happen when approaches 3p is that ǫ0 approaches zero so that the first order
correction term never actually gets large.

214 Chapter 8 Non-linear oscillations and phase space
xx
vv
1
1
1
1
FIGURE 8.9 Two different periodic responses to the same driving force. Left: A
response of period 2π , Right: A subharmonic response of period 4π .
an integer multiple of τ . This is certainly not possible in the linear case, where the driving
force and the induced response always have the same period. One way of investigating
this problem would be to expand the (unknown) response x(t) as a Fourier series and
to substitute this into the left side of Duffing’s equation. One would then require all the
odd numbered terms to magically cancel out leaving a function with period 2τ . Unlikely
though this may seem, it can happen! There are ranges of the parameters in Duffing’s
equation that permit a sub-harmonic response. Indeed, it is possible for the same set
of parameters to allow more than one periodic response. Figure 8.9 shows two different
periodic responses of the equation d2x/dt2 + kdx/dt + x3 = A cos t , each corresponding
to k = 0.04, A = 0.9. One response has period 2π while the other is a subharmonic
response with period 4π . Which of these is the steady state response depends on the
initial conditions. It is also possible for the motion to be chaotic with no steady state ever
being reached, even though damping is present.
Problems on Chapter 8
Answers and comments are at the end of the book.
Harder problems carry a star (∗).
Periodic oscillations: Lindstedt’s method
8 . 1 A nonlinear oscillator satisfies the equation
(
1 + ǫ x2)
x + x = 0,
where ǫ is a small parameter. Use Linstedt’s method to obtain a twoterm approximation to
the oscillation frequency when the oscillation has unit amplitude. Find also the corresponding
twoterm approximation to x(t). [You will need the identity 4 cos3 s = 3 cos s + cos 3s.]
8 . 2 A nonlinear oscillator satisfies the equation
x + x + ǫ x5 = 0,

8.5 Problems 215
where ǫ is a small parameter. Use Linstedt’s method to obtain a twoterm approximation to
the oscillation frequency when the oscillation has unit amplitude. [You will need the identity
16 cos5 s = 10 cos s + 5 cos 3s + cos 5s.]
8 . 3 Unsymmetrical oscillations A nonlinear oscillator satisfies the equation
x + x + ǫ x2 = 0,
where ǫ is a small parameter. Explain why the oscillations are unsymmetrical about x = 0 in
this problem.
Use Linstedt’s method to obtain a twoterm approximation to x(t) for the oscillation in
which the maximum value of x is unity. Deduce a twoterm approximation to the minimum
value achieved by x(t) in this oscillation.
8 . 4∗ A limit cycle by perturbation theory Use perturbation theory to investigate the limit
cycle of Rayleigh’s equation, taken here in the form
x + ǫ
(
13
x2 − 1)
x + x = 0,
where ǫ is a small positive parameter. Show that the zero order approximation to the limit
cycle is a circle and determine its centre and radius. Find the frequency of the limit cycle
correct to order ǫ2, and find the function x(t) correct to order ǫ.
Phase paths
8 . 5 Phase paths in polar form Show that the system of equations
x1 = F1(x1, x2, t), x2 = F2(x1, x2, t)
can be written in polar coordinates in the form
r =x1 F1 + x2 F2
r, θ =
x1 F2 − x2 F1
r2,
where x1 = r cos θ and x2 = r sin θ .
A dynamical system satisfies the equations
x = −x + y,
y = −x − y.
Convert this system into polar form and find the polar equations of the phase paths. Show that
every phase path encircles the origin infinitely many times in the clockwise direction. Show
further that every phase path terminates at the origin. Sketch the phase diagram.
8 . 6 A dynamical system satisfies the equations
x = x − y − (x2 + y2)x,
y = x + y − (x2 + y2)y.

216 Chapter 8 Non-linear oscillations and phase space
Convert this system into polar form and find the polar equations of the phase paths that begin
in the domain 0 < r < 1. Show that all these phase paths spiral anticlockwise and tend to
the limit cycle r = 1. Show also that the same is true for phase paths that begin in the domain
r > 1. Sketch the phase diagram.
8 . 7 A damped linear oscillator satisfies the equation
x + x + x = 0.
Show that the polar equations for the motion of the phase points are
r = −r sin2 θ, θ = −(
1 + 12
sin 2θ
)
.
Show that every phase path encircles the origin infinitely many times in the clockwise direc
tion. Show further that these phase paths terminate at the origin.
8 . 8 A nonlinear oscillator satisfies the equation
x + x3 + x = 0.
Find the polar equations for the motion of the phase points. Show that phase paths that begin
within the circle r < 1 encircle the origin infinitely many times in the clockwise direction.
Show further that these phase paths terminate at the origin.
8 . 9 A nonlinear oscillator satisfies the equation
x +(
x2 + x2 − 1)
x + x = 0.
Find the polar equations for the motion of the phase points. Show that any phase path that
starts in the domain 1 < r <√
3 spirals clockwise and tends to the limit cycle r = 1. [The
same is true of phase paths that start in the domain 0 < r < 1.] What is the period of the limit
cycle?
8 . 10 Predator–prey Consider the symmetrical predator–prey equations
x = x − xy, y = xy − y,
where x(t) and y(t) are positive functions. Show that the phase paths satisfy the equation
(
xe−x) (
ye−y)
= A,
where A is a constant whose value determines the particular phase path. By considering the
shape of the surface
z =(
xe−x) (
ye−y)
,
deduce that each phase path is a simple closed curve that encircles the equilibrium point at
(1, 1). Hence every solution of the equations is periodic! [This prediction can be confirmed
by solving the original equations numerically.]

8.5 Problems 217
Poincare–Bendixson
8 . 11 Use Poincare–Bendixson to show that the system
x = x − y − (x2 + 4y2)x,
y = x + y − (x2 + 4y2)y,
has a limit cycle lying in the annulus 12
< r < 1.
8 . 12 Van der Pol’s equation Use Poincare–Bendixson to show that Van der Pol’s equation∗
x + ǫ x(
x2 − 1)
+ x = 0,
has a limit cycle for any positive value of the constant ǫ. [The method is similar to that used
for Rayleigh’s equation in Example 8.4.]
Driven oscillations
8 . 13 A driven nonlinear oscillator satisfies the equation
x + ǫ x3 + x = cos pt,
where ǫ, p are positive constants. Use perturbation theory to find a twoterm approximation
to the driven response when ǫ is small. Are there any restrictions on the value of p?
8 . 14 Super-harmonic resonance A driven nonlinear oscillator satisfies the equation
x + 9x + ǫ x3 = cos t,
where ǫ is a small parameter. Use perturbation theory to investigate the possible existence of
a superharmonic resonance. Show that the zero order solution is
x0 =1
8(cos t + a0 cos 3t) ,
where the constant a0 is a constant that is not known at the zero order stage.
By proceeding to the first order stage, show that a0 is the unique real root of the cubic
equation
3a30 + 6a0 + 1 = 0,
which is about −0.164. Thus, when driving the oscillator at this subharmonic frequency, the
nonlinear correction appears in the zero order solution. However, there are no infinities to be
found in the perturbation scheme at this (or any other) stage.
Plot the graph of x0(t) and the path of the phase point (x0(t), x ′0(t)).
∗ After the extravagantly named Dutch physicist Balthasar Van der Pol (1889–1959). The equation arose
in connection with the current in an electronic circuit. In 1927 Van der Pol observed what is now called
deterministic chaos, but did not investigate it further.

218 Chapter 8 Non-linear oscillations and phase space
Computer assisted problems
8 . 15 Linstedt’s method Use computer assistance to implement Lindstedt’s method for the
equation
x + x + ǫ x3 = 0.
Obtain a threeterm approximation to the oscillation frequency when the oscillation has unit
amplitude. Find also the corresponding threeterm approximation to x(t).
8 . 16 Van der Pol’s equation A classic nonlinear oscillation equation that has a limit cycle
is Van der Pol’s equation
x + ǫ
(
x2 − 1)
x + x = 0,
where ǫ is a positive parameter. Solve the equation numerically with ǫ = 2 (say) and plot the
motion of a few of the phase points in the (x, v)plane. All the phase paths tend to the limit
cycle. One can see the same effect in a different way by plotting the solution function x(t)
against t .
8 . 17 Sub-harmonic and chaotic responses Investigate the steady state responses of the
equation
x + kx + x3 = A cos t
for various choices of the parameters k and A and various initial conditions. First obtain the
responses shown in Figure 8.9 and then go on to try other choices of the parameters. Some
very exotic results can be obtained! For various chaotic responses try K = 0.1 and A = 7.