-
JOURNAL OFSOUND ANDVIBRATION
Journal of Sound and Vibration 320 (2009) 10781099
frequencies and modes for simply supported boundary conditions.
Wu and Mote [2] studied the linear
ARTICLE IN PRESS
www.elsevier.com/locate/jsvi0022-460X/$ - see front matter r
2008 Elsevier Ltd. All rights reserved.
doi:10.1016/j.jsv.2008.08.024
Corresponding author at: Department of Mechanics, Shanghai
University, Shanghai 200444, China.E-mail address:
[email protected] (L.-Q. Chen).1. Introduction
Many real-life engineering devices, such as band saws, power
transmission chains, aerial cableways, andserpentine belts, involve
the transverse vibration of axially moving beams. Despite its wide
applications, thesedevices suffer from the occurrence of large
transverse vibrations due to initial excitations.
Transversevibrations of these devices have been investigated to
avoid possible resulting fatigue, failure, and low quality.For
example, the vibration of the blade of band saws causes poor
cutting quality. The vibration of the beltleads to noise and
accelerated wear of the belt in belt drive systems. Therefore,
vibration analysis of axiallymoving beams is important for the
design of the devices.There are many researches that have been
carried out on axially moving systems in literatures. Mote [1]
rst
investigated the effect of tension in an axially moving band and
computed numerically the rst threeAbstract
In this paper, nonlinear vibrations under weak and strong
external excitations of axially moving beams are analyzed
based on the Timoshenko model. The governing nonlinear
partial-differential equation of motion is derived from
Newtons second law, accounting for the geometric nonlinearity
caused by nite stretching of the beams. The complex
mode approach is applied to obtain the transverse vibration
modes and the natural frequencies of the linear equation. The
method of multiple scales is employed to investigate primary
resonances, nonsyntonic excitations, superharmonic
resonances, and subharmonic resonances. Some numerical examples
are presented to demonstrate the effects of a varying
parameter, such as axial speed, external excitation amplitudes,
and nonlinearity, on the response amplitudes for the rst
and second modes, when other parameters are xed. The stability
of the response amplitudes is investigated and the
boundary of instability is located.
r 2008 Elsevier Ltd. All rights reserved.Nonlinear vibrations of
axially moving Timoshenko beamsunder weak and strong external
excitations
You-Qi Tanga, Li-Qun Chena,b,, Xiao-Dong Yangc
aShanghai Institute of Applied Mathematics and Mechanics,
Shanghai 200072, ChinabDepartment of Mechanics, Shanghai
University, Shanghai 200444, China
cDepartment of Engineering Mechanics, Shenyang Institute of
Aeronautical Engineering, Shenyang 110034, China
Received 1 June 2008; received in revised form 17 August 2008;
accepted 26 August 2008
Handling Editor: L.G. Tham
Available online 19 October 2008
-
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 10781099 1079problem of parametric excitation
of an axially moving band by periodic edge loading with
differentassumptions. Wickert and Mote [3] presented a classical
vibration theory, comprised of a modal analysis and aGreens
function method, for the traveling string and the traveling beam,
where natural frequencies and modesassociated with free vibration
serve as a basis for analysis. Oz and Pakdemirli [4] and Oz [5]
calculated the rsttwo natural frequency values for different exural
stiffnesses in the cases of pinnedpinned ends andclampedclamped
ends, respectively. Ghayesh and Khadem [6] investigated free
nonlinear transverse vibrationof an axially moving beam in which
rotary inertia and temperature variation effects have been
considered andthey gave natural frequency versus the mean velocity
and rotary inertia, critical speed versus the rotary inertia,and
natural frequency versus the mean velocity and temperature for the
rst two modes. Lee and Jang [7]investigated the effects of
continuously incoming and outgoing semi-innite beam parts on
dynamiccharacteristics and stability of an axially moving beam by
using the spectral element method. In all of theabove literatures,
either simple support or xed support is researched. Yang and Chen
[8] studied axiallymoving elastic beams, and Chen and Yang [9]
studied viscoelastic beams, on simple supports with torsionsprings
and gave the rst two frequencies and modes.Lee et al. [10] used
exact dynamic-stiffness matrix in structural dynamics to provide
very accurate solutions,
while reducing the number of degrees of freedom to resolve the
computational and cost problems. Chakrabortyand Mallik [11] used
wave propagation in a simply supported traveling beam to derive
forced responses. Zhangand Zu [12] investigated the nonlinear
forced vibration of viscoelastic moving belts excited by the
eccentricity ofpulleys. Pellicano and Vestroni [13] investigated
the dynamic response of a simply supported traveling beamsubjected
to a transverse load in the super-critical speed range. Yang and
Chen [14] studied the nonlinear forcedvibration of axially moving
viscoelastic beams excited by vibration of the supporting
foundation.The axially moving beam has been traditionally
represented by the EulerBernoulli beam theory by
assuming that the beam is relatively thin compared to its
length. It appears that, to the authors knowledge,there have been
very few studies on the axially moving beam for the Timoshenko
model. Simpson [15] wasprobably the rst to derive equations of
motion for the moving thick beam on the basis of the Timoshenkobeam
theory, but no numerical results were given and he did not consider
axial tension in his equations.Chonan [16] studied the steady-state
response of a moving Timoshenko beam by applying the
Laplacetransform method. Arboleda-Monsalve et al. [17] presented
the dynamic-stiffness matrix and load vector of aTimoshenko beam
column resting on a two-parameter elastic foundation with
generalized end conditions. Meiet al. [18] presented wave vibration
analysis of an axially loaded cracked Timoshenko beam.The present
paper is organized as follows. Section 2 derives the governing
nonlinear partial-differential
equation of motion. Section 3 employs the method of multiple
scales to investigate nonlinear vibrations underweak and strong
external excitations. Section 4 ends the paper with concluding
remarks.
2. The governing equation
Uniform axially moving Timoshenko beams, with density r,
cross-sectional area A, area moment of inertiaof the cross-section
about the neutral axis J, initial tension P, shape factor k,
modulus of elasticity E, axialtension N, beam shearing modulus G,
travel at the constant axial transport speed G between two
simplesupports separated by distance L under the distributed
external excitation F in the transverse direction. Thebending
vibration can be described by two variables dependent on axial
coordinate X and time T, namely,transverse displacement Y(X,T) and
angle of rotation of the beam cross-section C(X,T) due to the
bendingmoment.Because shear deformations are considered, the angle
of the beam y depends not only on the angle C but
also on the shear angle g:
yx; t cx; t gx; t (1)The bending moment M(x, t) and shear force
Q(x, t) are related to the corresponding deformations:
M EJc;x,
Q M ;x AG c y AG c Y ;x (2)
k k
-
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 107810991080Coupled governing equations are
obtained according to Newtons second law:
Q;X dX cos y rAY ;TT 2GY ;XT cos y G2Y ;XX cos ydXN sin yN;X dX
sin y F dX 0,
rJc;TT M;X Q 0 (3)where F is the external transverse excitation.
The axial tension N is composed of the initial tension and
thetension due to the transverse displacement:
N P 12EAY ;X 2 (4)
Substituting Eqs. (2) and (4) into Eq. (3) and using the
approximate expressions cos y 1 and sin y y,x yieldthe governing
equation for the transverse vibration of axially moving Timoshenko
beams:
rJ 1 kPAG
kEG
Y ;XXTT EJ 1
kP
AG
Y ;XXXX PY ;XX
3
2EAY ;2XY ;XX
r2Jk
GY ;TTTT G2Y ;XXTT 2GY ;XTTT
3rEJk2G
Y ;2XY ;XXTT 4Y ;XY ;XTY ;XXT
2Y ;XY ;XXY ;XTT 2Y ;2XTY ;XX rEJkG
2GY ;XXXT G2Y ;XXXX 3E2Jk
2GY ;2XY ;XXXX
6Y ;XY ;XXY ;XXX 2Y ;3XX rAY ;TT 2GY ;XT G2Y ;XX F 0 (5)The
boundary conditions for the simple supports at both ends are
Y jX0 0; Y jXL 0; EJc;XX0 0; EJc;X
XL 0 (6)
It is assumed that the external transverse excitation is a
spatially uniformly distributed periodic force asF F1 cos(OT),
where F1 is the excitation amplitude and O the excitation
frequency.Introduce the dimensionless variables and parameters
y Y0:5L
; x XL
; t TP
rAL2;
sv G
rAP
;
rk0
kJP
GA2L2; k1
kJE
GAL2,
k2 EA
P; k3
J
AL2; k4
EJ
PL2; o O
rAL2
P;
sb LF 1
0:5rP(7)
where e, a dimensionless small number, denotes the small but
nite transverse deformation of beams.Dimensionless parameter k0
associated with k1 accounts for the effects of shear distortion,
parameter k2represents the effect of nonlinearity, parameter k3
represents the effects of rotary inertia, and parameter k4denotes
the stiffness of the beam. Integer r indicates the order of the
external excitation. For weak externalexcitations, F1 is of order
ey, and r 1; for strong external excitations, F1 is of order y, and
r 0.Substituting Eq. (7) into Eqs. (5) and (6) yields the
dimensionless form:
y;tt 2vy;xt v2 1y;xx k0 k1 k3 k0v2y;xxtt k1 k4 k1v2y;xxxx
k0y;tttt 2vy;xttt 2k1vy;xxxt
32
k2y;2xy;xx k1y;2xy;xxtt
4y;xy;xty;xxt 2y;xy;xxy;xtt 2y;2xty;xx k1k2y;2xy;xxxx
6y;xy;xxy;xxx 2y;3xx
rb cosoT0 (8)yx0 0; y
x1 0; y;xx
x0 0; y;xx
x1 0 (9)
Lee and Jang [7] proposed a set of governing equations for
axially moving EulerBernoulli beams toaccount for the momentum
transport through both of the end boundaries. For the transverse
vibration, theirequation differs from the traditional one with an
additional y,xxtt term. However, the present investigation
stilladopts the traditional formulation. It should be noticed that
Eq. (8) contains term y,xxtt. Therefore, the
following analysis may be valid for models developed by Lee and
Jangs approach.
-
qT2 k0
qT4 2v
qx qT0 2k0v
qx qT3 v 1
qx2 2k1vqx3 qT0
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 10781099 10811 :
0 0 0
k0 k1 k3 k0v2q4y1
qx2 qT20 k1 k4 k1v2
q4y1qx4
2 q2y0
qT0 qT1 4k0
q4y0qT30 qT1
2v q2y0
qx qT1 6k0v
q4y0qx qT20 qT1
32k2
qy0qx
2q2y0qx2
3k1q2y0qx qT0
2q2y0qx2
3k1qy0qx
q3y0qx qT20
q2y0qx2
3k1k2q2y0qx2
3
6k1qy0qx
q2y0qx qT0
q3y0qx2 qT0
2k0 k1 k3 k0v2q4y0
qx2 qT0 qT1
32k1
qy0qx
2 q4y0qx2 qT20
9k1k2qy0qx
q2y0qx2
q3y0qx3
2k1vq4y0
qx3 qT1
32k1k2
qy0qx
2q4y0qx4
b cosot
(13)
The solution to Eq. (12) can be assumed as
y f xA T ;T eionT0 f xA T ;T eionT0 (14)3. The multi-scale
analysis
The method of multiple scales will be employed to Eq. (8). One
assumes an expansion of dimensionlessdisplacement and its time
derivatives
yx; t; y0x;T0;T1;T2 y1x;T0;T1;T2 2y2x;T0;T1;T2 (10)
d
dt qqT0
qqT1
2 qqT2
,
d2
dt2 q
2
qT20 2 q
2
qT0 qT1 2 q
2
qT21 2 q
2
qT0 qT2
,
d3
dt3 q
3
qT30 3 q
3
qT20 qT1 32 q
3
qT0 qT21 q
3
qT20 qT2
! ,
d4
dt4 q
4
qT40 4 q
4
qT30 qT1 2 6 q
4
qT20 qT21
4 q4
qT30 qT2
! (11)
3.1. Nonlinear vibrations under external excitations
First, we consider nonlinear vibrations under weak external
excitations of axially moving beams on simplesupports based on the
Timoshenko beam model. At r 1, substituting Eq. (10) into Eq. (8),
and thenequalizing the coefcients e0 and e1 in the resulting
equation, one obtains
0 :
q2y0qT20
k0q4y0qT40
2v q2y0
qx qT0 2k0v
q4y0qx qT30
v2 1q2y0qx2
2k1vq4y0
qx3 qT0
k0 k1 k3 k0v2q4y0
qx2 qT20 k1 k4 k1v2
q4y0qx4
0(12)
q2y1 q4y1 q
2y1 q4y1 2 q
2y1 q4y10 n n 1 2 n n 1 2
-
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 107810991082where fn and on denote the nth
mode function and natural frequency and overbar represents
complexconjugate. Substituting Eq. (14) into Eqs. (12) and (9)
yields
k0fno4n 2ik0vf0no3n k0 k1 k3 k0v2f00n fn
o2n 2ivf0n k1f000n on
v2 1f00n k1 k4 k1v2f0000n 0 (15)
fn0 0; fn1 0; f00n0 0; f00n1 0 (16)The solution to ordinary
differential Eq. (15) can be expressed by
fnx C1neib1nx C2neib2nx C3neib3nx C4neib4nx (17)Substituting Eq.
(17) into Eqs. (15) and (16) yields
k1 k4 k1v2b4in 2vk1onb3in k0 k1 k3 k0v2o2n 1 v2b2in 2k0vo3n
2vonbin k0o4n o2n 0 (18)
1 1 1 1
b21n b22n b
23n b
24n
eib1n eib2n eib3n eib4n
b21n eib1n b22n e
ib2n b23n eib3n b24n e
ib4n
0BBBB@
1CCCCA
1
C2n
C3n
C4n
0BBB@
1CCCAC1n 0 (19)
For the nontrivial solution of Eq. (19), the determinant of the
coefcient matrix must be zero:
eib1nb2n eib3nb4n b21n b22nb23n b24n eib1nb3n eib2nb4n b23n
b21nb22n b24n eib1nb3n eib1nb4n b22n b23nb21n b24n 0 (20)
Using Eqs. (19) and (20), one can obtain the modal function of
the simply supported beam as follows:
fx c1 eib1nx b24n b21neib3n eib1n b24n b22neib3n eib2n
eib2nx b24n b21neib2n eib1n
b24n b23neib2n eib3neib3x
(
1 b24n b21neib3n eib1n
b24n b22neib3n eib2n b
24n b21neib2n eib1n
b24n b23neib2n eib3n
!eib4nx
)(21)
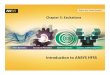
The nth eigenvalues bjn (j 1, 2, 3, 4) and the corresponding
natural frequency can be calculatednumerically considering boundary
conditions (9). Fig. 1 presents the natural frequencies for the rst
andsecond modes. It has been found that the natural frequencies
decrease with increasing axial speed. The exactvalue at which the
rst natural frequency vanishes is called the critical speed and
afterwards the system isunstable about the zero equilibrium.If the
axial speed variation frequency approaches any natural frequency of
the system (12), primary
response may occur. A detuning parameter s is introduced to
quantify the deviation of o from on and o isdescribed by
o on s (22)where on denote the nth natural frequency of free
vibration described by Eq. (12). To investigate the primaryresponse
with the possible contributions of modes not involved in the
resonance, the solution to Eq. (13) canbe expressed as
y f xA T ;T eionT0 f xA T ;T eiomT0 cc (23)0 n n 1 2 m m 1 2
-
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 10781099 1083where man. Substituting Eqs. (22)
and (23) into Eq. (13) yields
q2y1qT20
k0q4y1qT40
2v q2y1
qx qT0 2k0v
q4y1qx qT30
v2 1 q2y1qx2
2k1vq4y1
qx3 qT0
k0 k1 k3 k0v2q4y1
qx2 qT20 k1 k4 k1v2
q4y1qx4
3 0 2 0 2 00 000 qAn
10
8
6
4
2
1
2
0.5 1 1.5 2 2.5 3 3.5
k4 = 1k4 = 1
k4 = 0.36 k4 = 0.36
k4 = 0.64k4 = 0.64
k4 = 0.16 k4 = 0.16
k4 = 0.04 k4 = 0.04
35
30
25
20
15
10
5
0.5 1 1.5 2 2.5 3
Fig. 1. Natural frequency diagram: (a) the rst mode and (b) the
second mode. 2ionfn 2ik0onfn vfn 3k0vonfn ik0 k1 k3 k0v onfn k1vfn
qT1 322k2f0nf
0nf
00n 2k1o2nf0nf
0nf
00n k2f02nf
00n k1o2nf02nf
00n 6k1k2f002nf
00n 6k1k2f
0nf
00nf
000n
6k1k2f0nf00nf
000n 6k1k2f0nf00nf
000n 2k1k2f0nf
0nf
0000n k1k2f02nf
0000n A2nAn 3k2f0nf
0mf
00m k1o2nf0nf
0mf
00m
k2f0mf0mf
00n k1o2nf0mf
0mf
00n k2f0mf0nf
00m k1o2nf0mf0nf
00m 6k1k2f00mf00nf
00m 3k1k2f
0mf
00nf
000m
3k1k2f0nf00mf
000m 3k1k2f
0mf
00mf
000n 3k1k2f0mf
00mf
000n 3k1k2f0nf00mf
000m 3k1k2f0mf00nf
000m k1k2f0nf
0mf
0000m
k1k2f0mf0mf
0000n k1k2f0mf0nf
0000m AmAnAm
1
2b eisT1
eionT0
2iomfm 2ik0o3mfm vf0m 3k0vo2mf0m ik0 k1 k3 k0v2omf00m
k1vf000mqAmqT1
322k2f0mf
0mf
00m 2k1o2mf0mf
0mf
00m k2f02mf
00m k1o2mf02mf
00m 6k1k2f002mf
00n 6k1k2f0mf00mf000m
6k1k2f0mf00mf
000m 6k1k2f0mf00mf
000m 2k1k2f0mf
0mf
0000m k1k2f02mf
0000m A2mAm 3k2f0mf
0nf
00n k1o2mf0mf
0nf
00n
k2f0nf0nf
00m k1o2mf0nf
0nf
00m k2f0nf0mf
00n k1o2mf0nf0mf
00n 6k1k2f00nf00mf
00n 3k1k2f
0nf
00mf
000n
3k1k2f0mf00nf
000n 3k1k2f
0nf
00nf
000m 3k1k2f0nf
00nf
000m 3k1k2f0mf00nf
000n 3k1k2f0nf00mf
000n k1k2f0mf
0nf
0000n
k1k2f0nf0nf
0000m k1k2f0nf0mf
0000n AnAmAn eiomT0 ccNST (24)
where the prime denotes derivation with respect to the
dimensionless spatial variable x, cc stands for complexconjugate of
the proceeding terms, NST for non-secular terms, and h.o.t. for
high orders of e.
-
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 107810991084The solvability condition, which
demands orthogonal relationships, has been presented by Nayfeh
[19]:
2ionfn 2ik0o3nfn vf0n 3k0vo2nf0n ik0 k1 k3 k0v2onf00n k1vf000n
qAnqT1
322k2f0nf
0nf
00n 2k1o2nf0nf
0nf
00n k2f02nf
00n k1o2nf02nf
00n 6k1k2f002nf
00n 6k1k2f
0nf
00nf
000n
6k1k2f0nf00nf000n 6k1k2f0nf00nf000n 2k1k2f0nf0nf
0000n k1k2f02nf
0000n A2nAn
3k2f0nf0mf
00m k1o2nf0nf
0mf
00m k2f0mf
0mf
00n k1o2nf0mf
0mf
00n k2f0mf0nf
00m k1o2nf0mf0nf
00m
6k1k2f00mf00nf00m 3k1k2f
0mf
00nf
000m 3k1k2f0nf
00mf
000m 3k1k2f
0mf
00mf
000n 3k1k2f0mf
00mf
000n
3k1k2f0nf00mf000m 3k1k2f0mf00nf000m k1k2f0nf0mf
0000m k1k2f0mf
0mf
0000n k1k2f0mf0nf
0000m jAmj2An
12b eisT1
;fn
0 (25)
2iomfm 2ik0o3mfm vf0m 3k0vo2mf0m ik0 k1 k3 k0v2omf00m
k1vf000mqAmqT1
322k2f0mf
0mf
00m 2k1o2mf0mf
0mf
00m k2f02mf
00m k1o2mf02mf
00m 6k1k2f002mf
00n 6k1k2f
0mf
00mf
000m
6k1k2f0mf00mf
000m 6k1k2f0mf00mf000m 2k1k2f0mf
0mf
0000m k1k2f02mf
0000m A2mAm 3k2f0mf
0nf
00n
k1o2mf0mf0nf
00n k2f0nf
0nf
00m k1o2mf0nf
0nf
00m k2f0nf0mf
00n k1o2mf0nf0mf
00n 6k1k2f00nf00mf
00n
3k1k2f0nf00mf000n 3k1k2f0mf00nf
000n 3k1k2f
0nf
00nf
000m 3k1k2f0nf
00nf
000m 3k1k2f0mf00nf
000n
3k1k2f0nf00mf000n k1k2f0mf0nf
0000n k1k2f0nf
0nf
0000m k1k2f0nf0mf
0000n jAnj2Am
;fm
0 (26)
where the inner product is dened for complex functions on [0,1]
as
hf ; gi Z 10
f gdx (27)
Application of the distributive law of the inner product to Eqs.
(25) and (26) leads to
qAnqT1
knA2nAn mnmjAmj2An bwn eisT1 0 (28)
qAmqT1
kmA2mAm mmnjAnj2Am 0 (29)
where
kn 3
22k2
Z 10
f0nf0nf
00nfn dx 2k1o2n
Z 10
f0nf0nf
00nfn dx k2
Z 10
f02nf00nfn dx k1o2n
Z 10
f02nf00nfn dx
6k1k2Z 10
f002nf00nfn dx6k1k2
Z 10
f0nf00nf
000n fn dx6k1k2
Z 10
f0nf00nf
000n fn dx6k1k2
Z 10
f0nf00nf
000nfn dx
2k1k2Z 10
f0nf0nf
0000n fn dx k1k2
Z 10
f02nf0000n fn dx
2 ion
Z 10
fnfn dx 2ik0o3nZ 10
fnfn dx
vZ 1
f0nfn dx 3k0vo2nZ 1
f0nfn dx ik0 k1 k3 k0v2onZ 1
f00nfn dx k1vZ 1
f000n fn dx
(30a)
0 0 0 0
-
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 10781099 1085mnm 3 k2Z 10
f0nf0mf
00mfn dx k1o2n
Z 10
f0nf0mf
00mfn dx k2
Z 10
f0mf0mf
00nfn dx
k1o2nZ 10
f0mf0mf
00nfn dx k2
Z 10
f0mf0nf
00mfn dx k1o2n
Z 10
f0mf0nf
00mfn dx
6k1k2Z 10
f00mf00nf
00mfn dx 3k1k2
Z 10
f0mf00nf
000mfn dx 3k1k2
Z 10
f0nf00mf
000mfn dx
3k1k2Z 10
f0mf00mf
000n fn dx 3k1k2
Z 10
f0mf00mf
000n fn dx 3k1k2
Z 10
f0nf00mf
000mfn dx
3k1k2Z 10
f0mf00nf
000mfn dx k1k2
Z 10
f0nf0mf
0000m fn dx k1k2
Z 10
f0mf0mf
0000n fn dx
k1k2Z 10
f0mf0nf
0000m fn dx
2 ion
Z 10
fnfn dx
2ik0o3nZ 10
fnfn dx vZ 10
f0nfn dx
3k0vo2nZ 10
f0nfn dx ik0 k1 k3 k0v2onZ 10
f00nfn dx k1vZ 10
f000n fn dx
(30b)
wn Z 10
fn dx4 ion
Z 10
fnfn dx
2ik0o3nZ 10
fnfn dx vZ 10
f0nfn dx 3k0vo2nZ 10
f0nfn dx
ik0 k1 k3 k0v2onZ 10
f00nfn dx k1vZ 10
f000nfn dx
(30c)
Express the solution to Eqs. (28) and (29) in polar form
An anT1;T2 eibnT1;T2,Am amT1;T2 eibmT1;T2 (31)
Substituting Eq. (31) into Eq. (29) yields
qamqT1
Rekmb3m RemmnjAnj2bm,
amqbmqT1
Imkmb3m ImmmnjAnj2bm (32)
For steady-state solutions, the amplitude am and the new phase
bm angle in Eq. (32) should be constant.Setting a0m 0 and b0m 0
gives
0 Rekmb3m RemmnjAnj2bm,0 Imkmb3m ImmmnjAnj2bm (33)
Eq. (33) obviously has a zero solution. If we assume that there
is a non-zero solution, Eq. (33) yields
0 Rekmb2m RemmnjAnj2,0 Imkmb2m ImmmnjAnj2 (34)
The two equations in Eq. (34) cannot come into existence at the
same time. Thus, the assumption is wrong.The solution to Eq. (29)
has only zero stationary solution and decays to zero exponentially.
Therefore, the mthmode has actually no effect on the
stability.Substituting Eq. (31) into Eq. (28) and eliminating the
mth mode yields
qanqT1
bRewn cos yn b Imwn sin yn,
anqynqT
ans Imkna3n bRewn sin yn b Imwn cos yn (35)
1
-
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 107810991086where
yn sT1 bn (36)For steady-state solutions, the amplitude an and
the new phase yn angle in Eq. (35) should be constant. Settinga0n 0
and y0n 0 leads to
s Imkna2n b
anjwnj (37)
ana0 in Eq. (35) yields
qanqT1
bRewn cos yn b Imwn sin yn,qynqT1
s Imkna2n b
anRewn sin yn
b
anImwn cos yn (38)
The stability of the nontrivial state can be obtained by
perturbing these polar modulation equations andchecking the
eigenvalues of the resulting Jacobian matrix.To determine the
stability of the nontrivial state, these equations are perturbed to
obtain
DqanqT1
;DqynqT1
T JfDan;DyngT (39)
where T denotes transpose.The Jacobian matrix whose eigenvalues
determine the stability and bifurcations of the system is
J 0 san Imkna3n
san
3 Imknan 0
0@
1A (40)
The J-matrix characteristic function
l2 s Imkna2n
s 3Imkna2n 0 (41)
where l is an eigenvalue of the system. Based on RouthHurwitz
theorem, the boundary of instability yields
s Imkna2n
s 3 Imkna2n 0 (42)
Consider an axially moving beam with k4 0.64 and v 2.0. The
response amplitudes at exact resonancefor the rst two natural
frequencies are shown in Fig. 2. The rst two natural frequencies of
the unperturbedsystem are o1 4.7393 and o2 23.7017. In the rst-mode
response, the coefcients are b 0.04,k2 100,000, and in the
second-mode response, the coefcients are b 0.1, k2 100,000.Fig. 3
shows the effects of a different parameter k2. With an increase of
k2, response under the same
conditions decreases. In the rst-mode response, the coefcient is
b 0.04, and in the second-mode response,the coefcient is b 0.1. The
solid lines are for coefcient k2 50,000, the dashed for coefcientk2
100,000, and the dotted lines for coefcient k2 150,000.The effects
of the foundation vibration amplitude on the response amplitudes
are illustrated in Fig. 4. From
the response diagrams, it is clear that the excitation
amplitudes increase the amplitude of the excited system.The
coefcient is k2 100,000. In the rst-mode response, the solid lines
are for coefcient b 0.02, thedashed for coefcient b 0.04, and the
dotted lines for coefcient b 0.06. In the second-mode response,
thesolid lines are for coefcient b 0.05, the dashed are for
coefcient b 0.1, and the dotted lines for coefcientb 0.15.The
stability of the response amplitudes is illustrated in Fig. 5. In
the rst-mode response, the coefcients
are b 0.04 and k2 100,000. In the second-mode response, the
coefcients are b 0.1 and k2 100,000.
The solid lines denote the response amplitudes and the dashed
denote the boundary of instability.
-
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 10781099 10871
0.8
10-3 10-47
6
5The inner region of the boundary of instability is unstable and
the outer is stable. Thus a jump phenomenonappears.
3.2. Nonlinear vibrations under strong external excitations
Next, we consider nonlinear vibrations under strong external
excitations of axially moving beams on simplesupports based on the
Timoshenko beam model. At r 0, substituting Eq. (10) into Eq. (8),
and then
1
0.8
0.6
0.4
0.2
0
a n a n
10-3 10-4
-10 -5 0 5 10
7
6
5
4
3
2
1
0-10 -5 0 5 10
Fig. 3. Comparison of response amplitudes of a different
parameter k2: (a) the rst mode and (b) the second mode.
0.6
0.4
0.2
0
a n a n-10 -5 0 5 10
4
3
2
1
0-10 -5 0 5 10
Fig. 2. Response amplitudes diagram: (a) the rst mode and (b)
the second mode.
-
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 1078109910881
0.8
10-3 10-47
6
5equalizing the coefcients e0 and e1 in the resulting equation,
one obtains
0 :
q2y0qT20
k0q4y0qT40
2v q2y0
qx qT0 2k0v
q4y0qx qT30
v2 1q2y0qx2
2k1vq4y0
qx3 qT0
k0 k1 k3 k0v2q4y0
qx2 qT20 k1 k4 k1v2
q4y0qx4
b cosoT0(43)
1
0.8
0.6
0.4
0.2
0
a n a n
10-3 10-4
-10 -5 0 5 10
7
6
5
4
3
2
1
0-10 -5 0 5 10
Fig. 5. Stability of the response amplitudes: (a) the rst mode
and (b) the second mode.
0.6
0.4
0.2
0
a n a n
-10 -5 0 5 10
4
3
2
1
0-10 -5 0 5 10
Fig. 4. Comparison of response amplitudes of different
excitation amplitudes b: (a) the rst mode and (b) the second
mode.
-
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 10781099 10891 :
q2y1qT20
k0q4y1
qT40 2v q
2y1qx qT0
2k0v q4y1
qx qT30 v2 1q
2y1qx2
2k1v q4y1
qx3 qT0
k0 k1 k3 k0v2q4y1
qx2 qT20 k1 k4 k1v2
q4y1qx4
2 q2y0
qT0 qT1 4k0
q4y0qT30 qT1
2v q2y0
qx qT1 6k0v
q4y0qx qT20 qT1
32k2
qy0qx
2q2y0qx2
3k1q2y0qx qT0
2q2y0qx2
3k1qy0qx
q3y0qx qT20
q2y0qx2
3k1k2q2y0qx2
3
6k1qy0qx
q2y0qx qT0
q3y0qx2 qT0
2k0 k1 k3 k0v2q4y0
qx2 qT0 qT1
32k1
qy0qx
2 q4y0qx2 qT20
9k1k2qy0qx
q2y0qx2
q3y0qx3
2k1vq4y0
qx3 qT1 32k1k2
qy0qx
2q4y0qx4
(44)
Express the solution to Eq. (43) in the following form:
y0x;T0;T1;T2 fxqT0;T1;T2 cc (45)where f(x) is the complex mode
function satisfying the boundary condition. The mode function has
beencalculated above in Eq. (21).Substituting Eq. (45) into Eq.
(43), multiplying both sides by f(x), and integrating on [0,1]
gives
q4 a1 _ _ _q a2 q a3 _q a4q h cosoT0 (46)where
a1 2vR 10 ff
0 dxR 10 f
2 dx; a2
R 10 f
2 dx k0 k1 k3 k0v2R 10 ff
00 dx
k0R 10 f
2 dx; h b
R 10 fdx
k0R 10 f
2 dx,
a3 2vR 10 ff
0 dx k1R 10 ff
000 dx
k0R 10f2 dx
; a4 v2 1 R 10 ff00 dx k1 k4 k1v2 R 10 ff0000 dx
k0R 10f2 dx
(47)
Express the solution to Eq. (46) in polar form
q AT1;T2 eio0T0 B eioT0 (48)Substituting Eq. (48) into (46)
yields
B h2o4 ia1o3 a2o2 ia3o a4
(49)
The solution of Eq. (43) is
y0x;T0;T1;T2 fxAT1;T2 eio0T0 B eioT0 cc (50)Substituting Eq.
(50) into Eq. (44) yields
q2y1qT20
k0 q4y1
qT40 2v q
2y1qx qT0
2k0v q4y1
qx qT30 v2 1 q
2y1qx2
2k1v q4y1
qx3 qT0
k0 k1 k3 k0v2q4y1
qx2 qT20 k1 k4 k1v2
q4y1qx4
3 9k1o20 k2f02f00 2k1k2f003 6k1k2f0f00f000 k1k2f02f0000A3
e3io0T02
-
2ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 107810991090 6k1k2f0f00f000 f0f00f000
f0f00f000 k1k2f02f0000 2f0f0f0000AB2 eio02oT0
f3k1o2 k2f02f00 2f0f0f00 6k1k2f002f00 f0f00f000 f0f00f000
f0f00f000 2k1k2f0f0f0000 k1k2f02f0000ABA
32k1o2 k2f02f00 2f0f0f00 6k1k2f002f00 f0f00f000 f0f00f000
f0f00f000
2k1k2f0f0f0000 k1k2f02f0000B2Bg eioT0
3k1o20 k2f02f00 2f0f0f00 6k1k2f002f00 f0f00f000 f0f00f000
f0f00f000
2k1k2f0f0f0000 k1k2f02f0000ABB
32k1o20 k2f02f00 2f0f0f00 6k1k2f002f00 f0f00f000 f0f00f000
f0f00f000
2k1k2f0f0f0000 k1k2f02f0000A2A 2io01 2k0o20f v1 3k0o20f0 io0k0
k1 k3 k0v2f00
k1vf000qAqT1
eio0T0 ccNST h:o:t: (51)
where the prime denotes derivation with respect to dimensionless
spatial variable x, cc stands for complexconjugate of the
proceeding terms, NST for non-secular terms, and h.o.t. for high
orders of e.
3.2.1. Nonsyntonic excitations
When the frequency o is far from 0, o0, o0/3, and 3o0, the
solvability condition demands the orthogonalrelationship
3k1o20 k2f02f00 2f0f0f00 6k1k2f002f00 f0f00f000 f0f00f000
f0f00f000
2k1k2f0f0f0000 k1k2f02f0000ABB
32k1o20 k2f02f00 2f0f0f00 6k1k2f002f00 f0f00f000 f0f00f000
f0f00f000
2k1k2f0f0f0000 k1k2f02f0000A2A 2io01 2k0o20f v1 3k0o20f0 io0k0
k1 k3 k0v2f00
k1vf000qAqT
;f
0 (52) 329k1o2 k2f02f00 2k1k2f003 6k1k2f0f00f000 k1k2f02f0000B3
e3ioT0
92k2 k1o2 4k1oo0 4k1o20f02f00 2k1k2f003 6k1k2f0f00f000
k1k2f02f0000A2B eio2o0T0
32k2 k1o2 4k1oo0 4k1o20f0
2f00 2f0f0f00 6k1k2f00f00
2
6k1k2f0f00f000 f0f00f000 f0f00f000 k1k2f02f0000 2f0f0f0000A2B
eio2o0T0
92k2 k1o20 4k1oo0 4k1o2f02f00 2k1k2f003 6k1k2f0f00f000
k1k2f02f0000AB2 eio02oT0
3 k2 k1o20 4k1oo0 4k1o2f02f00 2f0f0f00 6k1k2f00f00
21
-
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 10781099 1091where the inner product is dened
for complex functions on [0,1] as
hf ; gi Z 10
f gdx (53)
Application of the distributive law of inner product to Eq. (52)
leads to
wABB kA2A qAqT1
0 (54)
where
w 3 k1o20 k2Z 10
ff02f00 dx 2Z 10
ff0f0f00 dx
6k1k2Z 10
ff002f00 dx
Z 10
ff0f00f000 dxZ 10
ff0f00f000 dxZ 10
ff0f00f000 dx
2k1k2
Z 10
ff0f0f0000 dx k1k2Z 10
ff02f0000dx
2 io01 2k0o20
Z 10
ffdx v1 3k0o20Z 10
ff0 dx io0k0 k1 k3 k0v2
Z 10
ff00 dx k1vZ 10
ff000 dx
(55a)
k 12w (55b)
These coefcients in Eq. (55) can be determined by the natural
frequencies and the modal functions calculatedfrom Eq. (12) with
the boundary condition. Consider the transformation
A a1T1;T2 eia2T1;T2,B b1 eib2 (56)
Substituting Eq. (56) into Eq. (54) yields
qa1qT1
a31kR a1b21wR (57a)
qa2qT1
a21kI b21wI (57b)
The rst approximate solution is
y0 a1 coso0t a2 B cosot O (58)These coefcients a1 and a2 can be
determined from Eqs. (57a) and (57b). The amplitude of the
free-vibrationterm will be attenuated. Steady-state response will
be only forced vibration term.
3.2.2. Superharmonic resonances and response amplitudes
To study the superharmonic resonances, a detuning parameter s is
introduced to quantify the deviation ando is described by
3o o0 s (59)Solvability requires
wABB kA2A zB3 eisT1 qAqT
0 (60)
1
-
ARTICLE IN PRESSwhere
w 3 k1o20 k2Z 10
ff02f00 dx 2Z 10
ff0f0f00 dx
6k1k2Z 10
ff002f00 dx
Z 10
ff0f00f000 dxZ 10
ff0f00f000 dxZ 10
ff0f00f000 dx
2k1k2
Z 10
ff0f0f0000 dx k1k2Z 10
ff02f0000dx
2 io01 2k0o20
Z 10
ffdx v1 3k0o20Z 10
ff0 dx io0k0 k1 k3 k0v2
Z 10
ff00 dxk1vZ 10
ff000 dx
(61a)
k 12w (61b)
z 32
k1o20 k2Z 10
ff02f00 dx 2k1k2Z 10
ff003 dx 6k1k2Z 10
ff0f00f000 dx
k1k2Z 10
ff02f0000 dx
2 io01 2k0o20Z 10
ffdx v1 3k0o20Z 10
ff0 dx
io0k0 k1 k3 k0v2Z 10
ff00 dx k1vZ 10
ff000 dx
(61c)
Consider the transformation
A a1T1;T2 eia2T1;T2; B b1 eib2 (62)Substituting Eq. (62) into
Eq. (60) yields
qa1qT1
a31kR a1b21wR b31zR cos3b2 sT1 a2 zI sin3b2 sT1 a2 (63a)
a1qa2qT1
a31kI a1b21wI b31zR sin3b2 sT1 a2 zI cos3b2 sT1 a2 (63b)
Then, we change Eq. (63) into an autonomous system
qa1qT1
a31kR a1b21wR b31zR cosg zI sing (64a)
qgqT1
s a21kI b21wI b31a1
zR sing zI cosg (64b)
where
g 3b2 sT1 a2 (65)For steady-state solutions, the amplitude a1
and the new phase g angle in Eq. (64) should be constant.
Settinga01 0 and g0 0 and then eliminating from Eq. (64) leads
to
s a21kI b21wI
b61zI 2 zR2 a21a21kR b21wR2
qa
(66)
Y.-Q. Tang et al. / Journal of Sound and Vibration 320 (2009)
1078109910921
-
When a1a0 in Eq. (64), the Jacobian matrix characteristic
function of the balanced solution on the righthand,
l2 22a21kR b21wRl 3a21kR b21wRa21kR b21wR s a21kI b21wI s 3a21kI
b21wI 0 (67)
where l is an eigenvalue of the system. Based on RouthHurwitz
theorem, the boundary of instability yields
3a21kR b21wRa21kR b21wR s a21kI b21wI s 3a21kI b21wI 0 (68)
ARTICLE IN PRESS
1
0.8
0.6
a n a n
10-3 10-44
3
2
1
0.8
0.6
0.4
0.2
0
a n a n
10-3 10-4
-10 -5 0 5 10
4
3
2
1
0-5 0 5
Fig. 6. Response amplitude diagram: (a) the rst mode and (b) the
second mode.
Y.-Q. Tang et al. / Journal of Sound and Vibration 320 (2009)
10781099 10930.4
0.2
0-10 -5 0 5 10
1
0-5 0 5
Fig. 7. Comparison of response amplitudes of a different
parameter k2: (a) the rst mode and (b) the second mode.
-
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 107810991094Consider an axially moving beam
with k4 0.64 and v 2.0. The response amplitudes at exact
resonancefor the rst two natural frequencies are shown in Fig. 6.
The rst two natural frequencies of the unperturbedsystem are o1
4.7393 and o2 23.7017. In the rst-mode response, the coefcients are
b 0.03,k2 100,000, and in the second-mode response, the coefcients
are b 0.5, k2 100,000.Fig. 7 indicates the effects of a different
parameter k2. With an increase of k2, response under the same
1
0.8
0.6
0.4
0.2
0
a n a n
10-3 10-4
-10 -5 0 5 10
4
3
2
1
0-5 0 5
Fig. 8. Comparison of response amplitudes of different
excitation amplitudes b: (a) the rst mode and (b) the second
mode.conditions decreases. In the rst-mode response, the coefcient
is b 0.03, and in the second-mode response,the coefcient is b 0.5.
The dotted lines are for coefcient k2 50,000, the dashed for
coefcientk2 100,000, and the solid lines for coefcient k2
150,000.The effects of the external excitation amplitudes on the
response amplitudes are illustrated in Fig. 8. From
the response diagrams, it is clear that the external excitation
amplitudes increase the amplitude of the excitedsystem. The
coefcient here is k2 100,000. In the rst-mode response, the solid
lines are for coefcientb 0.05, the dotted lines for coefcient b
0.04, and the dashed for coefcient b 0.03. In the
second-moderesponse, the solid lines are for coefcient b 0.7, the
dotted lines for coefcient b 0.5, and the dashed forcoefcient b
0.3.The stability of the response amplitudes is illustrated in Fig.
9. In the rst-mode response, the coefcients
are b 0.03 and k2 100,000. In the second-mode response, the
coefcients are b 0.7 and k2 100,000.The solid lines denote the
response amplitudes and the dashed denote the boundary of
instability.The inner region of the boundary of instability is
unstable and the outer is stable. Thus a jump
phenomenonappears.
3.2.3. Subharmonic resonances and responses amplitudes
To study the subharmonic resonances, a detuning parameter s is
introduced to quantify the deviation and ois described by
o 3o0 s (69)Solvability requires
wABB kA2A zA2B eisT1 qAqT1
0 (70)
-
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 10781099 1095where
w 3 k1o20 k2Z 10
ff02f00 dx 2Z 10
ff0f0f00 dx
6k1k2Z 10
ff002f00 dx
Z 10
ff0f00f000 dxZ 10
ff0f00f000 dxZ 10
ff0f00f000 dx
2k1k2Z 1 0 0 0000
Z 1 02 0000
2
1
0.8
0.6
0.4
0.2
0
a n a n
10-3 10-4
-5 0 5 10
4
3
2
1
0-5 0 5
Fig. 9. Stability of the response amplitudes: (a) the rst mode
and (b) the second mode.0
ff f f dx k1k20
ff f dx 2 io01 2k0o0
Z 10
ffdx v1 3k0o20Z 10
ff0 dx io0k0 k1 k3 k0v2
Z 10
ff00 dxk1vZ 10
ff000 dx
(71a)
k 12w (71b)
z 32
k1o20 k2Z 10
ff02f00 dx 2
Z 10
ff0f0f00 dx
6k1k2Z 10
ff00f002dx
6k1k2Z 10
ff0f00f000 dxZ 10
ff0f00f000 dxZ 10
ff0f00f000 dx
k1k2Z 10
ff02f0000 dx 2
Z 10
ff0f0f 0000dx
2 io01 2k0o20Z 10
ffdx v1 3k0o20
Z 10
ff0 dxio0k0 k1 k3 k0v2Z 10
ff00 dx k1vZ 10
ff000 dx
(71c)
Consider the transformation
A a1T1;T2 eia2T1;T2; B b1 eib2 (72)
-
Substituting Eq. (72) into Eq. (70) yields
qa1qT1
a31kR a1b21wR a21b1 zR cosb2 sT1 3a2 zI sinb2 sT1 3a2
(73a)
qa2qT1
a21kI b21wI a1b1 zR sinb2 sT1 3a2 zI cosb2 sT1 3a2
(73b)
Then, we change Eq. (73) into an autonomous system
qa1qT1
a31kR a1b21wR a21b1zR cos g zI sin g (74a)
qgqT1
s 3a21kI 3b21wI 3a1b1zR sing zI cos g (74b)
where
g b2 sT1 3a2 (75)For steady-state solutions, the amplitude a1
and the new phase g angle in Eq. (74) should be constant.
Settinga01 0 and g0 0 and then eliminating from Eq. (74) leads
toq
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 107810991096s 3a21kI b21wI 3 a21b21zI 2 zR2
a21kR b21wR2 (76)When a1a0 in Eqs. (74), the J-matrix
characteristic function of balanced solution on the right hand,
l2 22a21kR b21wRl 3a21kR b21wRa21kR b21wR 3 s
3 a21kI b21wI
s3 a21kI b21wI
0 (77)
where l is an eigenvalue of the system. Based on RouthHurwitz
theorem, the boundary of instability yields
a21kR b21wRa21kR b21wR s3 a21kI b21wI
s3 a21kI b21wI
0 (78)
Consider an axially moving beam with k4 0.64 and v 2.0. The
response amplitudes at frequencies threetimes those of exact
resonance for the rst two natural frequencies are shown in Fig. 10.
The rst two natural
1
0.8
0.6
0.4
0.2
0
1
0.8
0.6
0.4
0.2
0
a n a n
10-3 10-3
0 5 10 15 20 25
0 20 40 60 80Fig. 10. Response amplitude diagram: (a) the rst
mode and (b) the second mode.
-
frequencies of the unperturbed system are o1 4.7393 and o2
23.7017. In the rst-mode response, thecoefcients are b 0.03, k2
100,000, and in the second-mode response, the coefcients are b 5,k2
100,000.Fig. 11 shows the effects of a different parameter k2. In
the rst-mode response, the coefcient is b 0.03,
and in the second-mode response, the coefcient is b 5. The
dotted lines are for coefcient k2 50,000, thedashed for coefcient
k2 100,000, and the solid lines for coefcient k2 150,000.The
effects of the external excitation amplitudes on the response
amplitudes are illustrated in Fig. 12. From
the response diagrams, it is clear that the excitation
amplitudes increase the amplitude of the excited system.The
coefcient is k2 100,000. In the rst-mode response, the solid lines
are for coefcient b 0.1, the dotted
ARTICLE IN PRESS
10-3 10-31
0.8
0.6
a n
1
0.8
0.6
a n
1
0.8
0.6
0.4
0.2
0
a n
1
0.8
0.6
0.4
0.2
0
a n
0 10 20 30 40
0 20 40 60 80 100
10-3 10-3
Fig. 11. Comparison of response amplitudes of a different
parameter k2: (a) the rst mode and (b) the second mode.
Y.-Q. Tang et al. / Journal of Sound and Vibration 320 (2009)
10781099 10970.4
0.2
0
0.4
0.2
00 5 10 15 20 25
0 20 40 60 80
Fig. 12. Comparison of response amplitudes of different
excitation amplitudes b: (a) the rst mode and (b) the second
mode.
-
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 107810991098lines for coefcient b 0.06, and
the dashed for coefcient b 0.03. In the second-mode response, the
solidlines are for coefcient b 5.5, the dotted lines for coefcient
b 5, and the dashed for coefcient b 4.5.The stability of the
response amplitudes is illustrated in Fig. 13. In the rst-mode
response, the coefcients
are b 0.03 and k2 100,000. In the second-mode response, the
coefcients are b 5 and k2 100,000. Thesolid lines denote the
response amplitudes and the dashed denote the boundary of
instability. The inner regionof the boundary of instability is
unstable and the outer is stable. Thus a jump phenomenon
appears.
4. Conclusions
In this investigation, nonlinear vibrations under weak and
strong external excitations of axially moving
10-3 10-31
0.8
0.6
0.4
0.2
0
a n a n
0 5 10 15 20 25
1
0.8
0.6
0.4
0.2
00 20 40 60 80
Fig. 13. Stability of the response amplitudes: (a) the rst mode
and (b) the second mode.beam on simple supports are studied based
on the Timoshenko beam model. A partial-differential
nonlinearequation is derived from Newtons second law. The
multiple-scale method is used to discuss nonsyntonicexcitations,
superharmonic resonances, and subharmonic resonances. The
nontrivial steady-state response andits existence conditions are
presented. The system shows a typical muti-valued nonlinear
phenomenon. Thenumerical examples investigated reveal the
following.The natural frequencies decrease with an increase in the
axial speed for simple supports. The rst natural
frequency vanishes at the critical speed and afterwards the
system is unstable about the zero equilibrium.The assumption that
the primary response with the possible contributions of modes does
not involve
resonance is wrong. The modes have only zero stationary
solution, which decays to zero exponentially.Therefore, the modes
have actually no effect on the stability.For the efforts of
different parameters about nonlinear vibrations under weak and
strong external
excitations, the response amplitudes increase with decreasing
nonlinear effects, and with increasing externalexcitation
amplitudes.
Acknowledgements
This work was supported by the National Outstanding Young
Scientists Fund of China (Project no.10725209), the National
Natural Science Foundation of China (Project no. 10672092),
Shanghai MunicipalEducation Commission Scientic Research Project
(no. 07ZZ07), Innovation Foundation for Graduates ofShanghai
University (Project no. A.16-0101-07-011), and Shanghai Leading
Academic Discipline Project(no. Y0103).
-
References
[1] C.D. Mote Jr., Dynamic stability of an axially moving band,
Journal of the Franklin Institute 285 (1968) 329346.
[2] W.Z. Wu, C.D. Mote Jr., Parametric excitation of an axially
moving band by periodic edge loading, Journal of Sound Vibration
110
(1986) 2739.
[3] J.A. Wickert, C.D. Mote Jr., Classical vibration analysis of
axially moving continua, ASME Journal of Applied Mechanics 57
(1990)
738744.
[4] H.R. Oz, M. Pakdemirli, Vibrations of an axially moving beam
with time dependent velocity, Journal of Sound and Vibration
227
(1999) 239257.
[5] H.R. Oz, On the vibrations of an axially traveling beam on
xed supports with variable velocity, Journal of Sound and Vibration
239
(2001) 556564.
[6] M.H. Ghayesh, S.E. Khadem, Rotary inertia and temperature
effects on non-linear vibration, steady-state response and
stability of
an axially moving beam with time-dependent velocity,
International Journal of Mechanical Sciences 50 (2008) 389404.
[7] U. Lee, I. Jang, On the boundary conditions for axially
moving beams, Journal of Sound and Vibration 306 (2007) 675690.
[8] X.D. Yang, L.Q. Chen, The stability of an axially
acceleration beam on simple supports with torsion springs, Acta
Mechanica Solida
Sinica 18 (2005) 18.
[9] L.Q. Chen, X.D. Yang, Vibration and stability of an axially
moving viscoelastic beam with hybrid supports, European Journal
of
Mechanics A/Solids 25 (2006) 9961008.
[10] U. Lee, J. Kim, H. Oh, Spectral analysis for the transverse
vibration of an axially moving Timoshenko beam, Journal of Sound
and
Vibration 271 (2004) 685703.
[11] G. Chakraborty, A.K. Mallik, Wave propagation in an
vibration of a traveling beam with and without non-linear effects,
part II:
ARTICLE IN PRESSY.-Q. Tang et al. / Journal of Sound and
Vibration 320 (2009) 10781099 1099forced vibration, Journal of
Sound and Vibration 236 (2) (2000) 291305.
[12] L. Zhang, J.W. Zu, Non-linear vibrations of viscoelastic
moving belts, part II: forced vibration analysis, Journal of Sound
and
Vibration 216 (1) (1998) 93105.
[13] F. Pellicano, F. Vestroni, Complex dynamics of high-speed
axially moving systems, Journal of Sound and Vibration 258 (1)
(2002)
3144.
[14] X.D. Yang, L.Q. Chen, Non-linear forced vibration of
axially moving viscoelastic beams, Acta Mechanica Solida Sinica 19
(2006) 19.
[15] A. Simpson, Transverse modes and frequencies of beams
translating between xed end supports, Journal of Mechanical
Engineering
Science 15 (1973) 159164.
[16] S. Chonan, Steady state response of an axially moving strip
subjected to a stationary lateral load, Journal of Sound and
Vibration 107
(1) (1986) 155165.
[17] L.G. Arboleda-Monsalve, D.G. Zapata-Medina, J.D.
Aristizabal-Ochoa, Timoshenko beam-column with generalized end
conditions
on elastic foundation: dynamic-stiffness matrix and load vector,
Journal of Sound and Vibration 310 (2008) 10571079.
[18] C. Mei, Y. Karpenko, S. Moody, D. Allen, Analytical
approach to free and forced vibrations of axially loaded cracked
Timoshenko
beams, Journal of Sound and Vibration 291 (2006) 10411060.
[19] A.H. Nayfeh, Introduction to Perturbation Techniques,
Wiley, New York, 1982.
Nonlinear vibrations of axially moving Timoshenko beams under
weak and strong external excitationsIntroductionThe governing
equationThe multi-scale analysisNonlinear vibrations under external
excitationsNonlinear vibrations under strong external
excitationsNonsyntonic excitationsSuperharmonic resonances and
response amplitudesSubharmonic resonances and responses
amplitudes
ConclusionsAcknowledgementsReferences