Embed Size (px)
Citation preview

NUMERICAL ANAL YSIS OF LATERAL WAVE PROPAGATION IN DRILL-STRINGFOR STABILITY MONITORING
Yu Liu and Andrew J. Dick ∗
Nonlinear Phenomena LaboratoryDept. of Mechanical Engineering
Rice UniversityHouston, Texas 77005, USA
ABSTRACTIn this paper, the propagation of lateral waves in a drill-
string are studied by using a new numerical method and a sta-bility monitoring scheme is proposed. The drill-string is mod-eled as a linear beam structure under gravitational field effects.An iterative wavelet-based spectral finite element method (WS-FEM) model is developed to obtain a high fidelity response.Numerical simulations of the lateral impact wave propagationat the bottom-hole-assembly (BHA) are conducted and a time-frequency analysis technique is applied to the response in orderto identify the relationship between the position of the transi-tion point between positive and negative strain and the dispersiveproperties of the lateral wave. Based on the results, a new mon-itoring scheme is proposed to monitor the stability of the drill-string based on a combination of lateral impact wave analysis atthe BHA and the axial acoustic telemetry technique.
NOMENCLATUREx Position along the length of the beam.t Time.w Lateral displacement in the time-domain.w Lateral displacement in the wavelet-domain.E Elastic modulus.I Second moment of inertia.ρ Density.A Cross section area.λ Pseudo-frequency.
∗Addressall correspondence to this author: [email protected]
FG Gravitational term in the time-domain.FG Gravitational term in the wavelet-domain.j Index of the wavelet point.KB Spectrally formulated dynamic stiffness matrix.NB Spectrally-depended shape function.QE Equivalent external force term.QG Equivalent gravitational force term.β Error measure.
INTRODUCTIONThe energy revolution created by technological advances
such as horizontal drilling and hydraulic fracturing in the pastdecade has put U.S. on the track to gain true energy security andindependence [1]. However, challenges still exist. Global com-petition keeps driving the need to lower operating cost and makethe exploration more efficient. Many reports have shown thatmost deep vertical exploration wells are subject to drill-stringfailures resulting from extreme drilling dynamics events [1].These failures result in a tremendous increase of non-productivetime and the potential loss of downhole equipment. Meanwhile,the latest innovations of information technology and the ad-vanced downhole sensors have been combined to provide vastamounts of near real-time information about the drilling process.The question now is how to utilize the information to achieveoptimal well monitoring and intelligent surveillance of the drill-string.
The general definition of mechanical waves includes bothstanding waves and propagating waves. Standing waves, also
1 Copyright © 2014 by ASME
Proceedings of the ASME 2014 International Mechanical Engineering Congress and Exposition IMECE2014
November 14-20, 2014, Montreal, Quebec, Canada
IMECE2014-38597

known as vibrations, result from the superposition of left andright-traveling waves to form non-propagating local motion.Propagating waves refer to the propagating process of wave en-ergy over a distance. The connection between the two types ofwaves is that propagating waves can be considered as a transientform of vibrations before the traveling waves reflect from theboundaries and interact with each other.
Vibrations in drill-string have three modes: axial, torsional,and lateral. All three modes can be destructive to the operationof the drill-string and may need to be mitigated. Axial vibra-tions can be attributed to the bit bounce of the roller-cone bit. Itis detected by the variation of the Weight On Bit (WOB) or theWeight of Hook-load (WOH) [2]. Severe bit bounce may dam-age bit cutters and bearings. Torsional vibration can be causedby stick/slip and is observed by the oscillation of the drilling ro-tational speed [2]. These vibrations may fatigue the drill collar(DC) connections and damage the bits. Lateral vibrations areconsidered to be the most destructive type. They result from largeshock impacts with the wellbore wall and result in high rates ofcomponent and connection fatigue. The impact may also damagethe rock and result in wellbore enlargement. Due to the highlydispersive nature of lateral wave propagation and the presence ofdamping effects from the mud flow, severe lateral vibrations thatoccur at BHA may be very difficult to detect on the surface.
Axial and torsional waves have also been constructively uti-lized to transmit information through drill-strings since they canbe non-dispersive for frequencies below 2 kHz when used in hy-drocarbon drilling. Their applications in seismic-while-drilling(SWD) operations are well documented in the literature [3].In acoustic telemetry, while-drilling information like tempera-ture and pressure can also be encoded and transmitted from theBHA to the surface. Traditional telemetry techniques have se-vere drawbacks. Mud pulse telemetry is notorious for its lowtransmission rate of only about 2 bits per second. Electromag-netic (EM) telemetry can only effectively transmit data in forma-tions with high resistivities [4]. Acoustic telemetry utilizes thepropagation of stress waves through the drill-string, can transmitdata at 50-100 bits per second, and is relatively unaffected by theproperties of the formation and the operation conditions [4]. It isbecoming a promising new technology and has been developedinto commercial products by a number of energy companies.
Lateral waves are seldomly used to transmit information dueto their highly dispersive nature. However, recent studies indi-cate that they can be constructively utilized to predicate the sta-bility of the drill-string. Instability is defined as large amplitudelateral vibrations occurring at the BHA and may result in severeimpacts with the wellbore wall. Carcioneet al. used both analyt-ical and numerical approaches to simulate lateral waves in a drill-string including the effects of the gravitational field based onan one-dimensional (1D) linear Euler-Bernoulli beam model [5].This work focused on the structural response to tone-burst inputsignals with concentrated frequency content. Due to the presence
of the neutral point [6], the lower part of the BHA is under com-pressive axial stress. By analyzing the value of the wavenumberand the dispersive behavior of lateral waves in numerical simu-lation, the instability of the drill-string can be successfully pre-dicted. Polettoet al. showed that the axial wave signal maybe significantly affected by the lateral motion of drill pipes fora coupled nonlinear model [7]. They developed a propagation-matrix algorithm to simulate lateral waves in a drill-string basedon frequency-dependent reflection and transmission coefficientsat the interface between pipe intervals.
Most of the numerical studies of vibrations and propagatingwaves in drill-strings use a time-domain finite element method(TFEM), in which a serial time integration technique is oftenadopted. When the frequency content reaches the level of kHz,numerical dispersion or dissipation may be erroneously intro-duced and potentially reduce the accuracy of the simulation re-sult [8]. Also due to the serial nature of the method, the compu-tational performance of TFEM is also expected to be limited forreal-time implementation.
Mitra and Gopalakrishnan developed a wavelet-based spec-tral finite element method (WSFEM) for studying linear wavepropagation [8]. This method transforms all calculations into awavelet-domain and uses exact wave solutions as spectrally de-pendent shape functions. It can obtain high-fidelity responsesfor impact problems with high frequency content. In the pre-vious work of the authors [9], a new spectral-domain numer-ical method named the alternating wavelet-time finite elementmethod (AWT-FEM) was developed based on WSFEM to studynonlinear wave propagation in 1D and 2D waveguides. In thismethod, an alternating iterative procedure between the time-domain and the wavelet-domain combined with the spectral finiteelement method (SFEM) [10] is employed to solve wave equa-tions with general nonlinearities. Compatibility with a parallelcomputing framework and the semi-analytical nature of WSFEMmake it more computationally efficient for nonlinear problemsmodeled with structural components.
In this paper, the BHA of the drill-string is simplified as alinear beam model subject to an impact shock. Lateral waves aregenerated and propagate through the BHA. Due to the highly dis-persive nature of lateral waves and the strongly dissipative envi-ronment, lateral impact waves are assumed to be non-observablein the upper drill-pipe. Hence, the upper drill-pipe can be ap-proximated as a fixed boundary condition at the top.
Since a linear decoupled model is adopted and the ampli-tude of response is expected to remain in a small strain valueregime, the transverse oscillation of a structure with a circularcross-section is decoupled from the lateral motion. No twistedbending resulting from coupling between transverse and lateralmotions in large-amplitude nonlinear vibration is occurring [11].
Based on the these approximations, the AWT-FEM is firstadapted to study the lateral impact wave response in the BHA.By performing time-frequency analysis on the responses, the re-
2 Copyright © 2014 by ASME

lationship between the WOB and dispersion is studied. Basedon theresults, a monitoring scheme is proposed to monitor thestability condition of the drill-string.
The remainder of this paper is organized as follows. In thesecond section, the governing equation for lateral motion of thedrill-string is derived. An iterative procedure based on AWT-FEM to perform simulations with the model is also briefly intro-duced here. In the third section, the results of numerical simula-tions for lateral impact waves are discussed. A stability monitor-ing scheme for the drill-string operation is then proposed in thefourth section. Concluding remarks and the direction of futureworks are provided in the final section.
MODELINGThe governing equation of motion for the BHA modeled as
a 1D beam under impact loading is first derived. An iterativeprocedure based on WSFEM is then adapted for the model.
Governing equations of the lateral impact waveThe BHA can be approximated as a 1D beam structure when
the wavelengths are much larger than the radial dimensions of thepipes. For studying wave propagation, the wavelength should beat least five times larger than the diameter of the drill-string [12].In this study, the frequency range being considered is below300 Hz and the wavelength is greater than 15 m, which is muchlarger than the diameter of the drill-string. Under these condi-tions, the 1D beam model is an accurate approximation for thesesimulations. In vertical drilling, the drill-string is suspended bya cable system on the derrick. The gravitational body force is animportant factor that must be included in the model.
Homogeneous material property and uniform geometry areassumed. In this study, the research is focused on the initial stageof a downhole impact event to monitor the stability and preventpotential large amplitude vibration. The amplitude of the re-sponse is expected to be small and the strain value is expectedto be within the linear regime. The axial motion is decoupledfrom the lateral motion and is not considered. By using Hamil-ton’s principle, the homogeneous governing equation of lateralmotion for a 1D Euler-Bernoulli beam is derived as
−(w′N)′+EIw′′′′+ρAw= 0, (1)
where the prime represents a derivative with respect to the spa-tial coordinatex along the central axis, the over-dot represents aderivative with respect to timet, E is the elastic modulus,I is thesecond moment of inertia,ρ is the density,A is the cross sectionarea,w is the transverse displacement, andN is the internal axialnormal force.
For a complete model including a geometric nonlinearity,Eqn. (1) is a nonlinear partial differential equation (PDE) and
N = EA(u′ + 0.5w′2), whereu is the axial displacement. Dueto the presence of the gravitational field, the magnitude ofu′ ismuch larger than the magnitude of the higher order termw′2 inthe linear strain regime. The geometrically nonlinear term 0.5w′2
resulting from the deflection of the beam is neglected and the in-ternal axial normal force becomesN = EAu′. The assumptionbehind this approximation is that the internal axial normal forcedoes not vary as the beam is experiencing lateral motion [13].Hence, the axial and lateral motions are decoupled. This assump-tion is justified because the strain value being considered here iswithin the linear region of the constitutive relationship. In themodel of the drill-string which includes gravitational forces,N isdefined as
N = ρAg(x−xn), (2)
whereg is gravitational acceleration andxn is the position of theneutral point from the bottom of the BHA [6]. The neutral pointis defined as the transition point between positive and negativeaxial stress [6].
By substituting Eqn. (2) into Eqn. (1), the simplified homo-geneous governing equation of motion are obtained as
EIw′′′′+ρAw−FG(x, t) = 0, (3)
where the gravitational termFG(x, t) = ρAg(w′−xnw′′+xw′′).
Wavelet-based spectral finite element methodIn the authors’ previous work, a high fidelity method named
the alternating wavelet-time finite element method was devel-oped to study the nonlinear PDE in Eqn. (1). An alternatingiterative procedure between the wavelet-domain and the time-domain is set up in order to avoid the calculation of nonlinearterms in convolution form. Here, the method is adapted to solvethe simplified model in Eqn. (3).
By using the spectrally-uncoupled wavelet transform devel-oped by Mitra and Gopalakrishnan [8], the governing equationin the wavelet-domain is obtained as
EIw′′′′j +ρAλ 2
j w j − FG j(x) = 0, j = 0,1, . . . ,n−1, (4)
where(ˆ) represents the corresponding variables in the wavelet-domain, j is the index of the wavelet point,n is the number ofthe time sampling, andλ j can be treated as a pseudo-frequencyand is related to the physical angular frequencyω j in the Fourier-domain implementation of SFEM throughλ j = iω j .
Equation (4) is a linear ordinary differential equation but thepresence ofxw′′
j in the gravitational termFG j makes it difficult toobtain an exact solution. By initially removing the gravitational
3 Copyright © 2014 by ASME

termFG j, only the first two linear terms remain and a linear waveequationis obtained. Exact solutions to this linear wave equa-tion are well-established for the 1D beam model [10]. By usingthe exact wave solutions as spectrally-dependent shape functionsNB as defined in [10], a finite element procedure is applied toEqn. (4). The result is
K(λ j)q j = QE +QG, (5)
whereq j is the nodal displacement vector.K(λ j) is the spectrallyformulated dynamic stiffness matrix and is defined as
KB =∫ Le
0EIN′′T
B N′′Bdx+λ 2
j
∫ Le
0ρANT
BNBdx, (6)
whereLe is the element length.QE is the equivalent externalforce term.QG is the equivalent gravitational force term definedas
QG =
∫ Le0 NB1FG jdx∫ Le
0 NB2FG jdx∫ Le
0 NB3FG jdx∫ Le
0 NB4FG jdx
, (7)
where the termsNBi for i = 1,2,3,4 are elements ofNB.Unlike a nonlinear force term, the gravitational force term
FG j is linear and can be calculated in the wavelet-domain with-out affecting the computational performance. A direct iterativeprocedure in the wavelet-domain is constructed to solve Eqn. (5).The initial state is obtained by setting the gravitational force termequal to zero. For each iteration, the algebraic equation is solvedand the new nodal values of the gravitational force term are cal-culated from the current states. The values calculated forQG aredirectly substituted into the next iteration. The process is contin-ued until the predefined error measure in Eqn. (8) is less than aprescribed tolerance. The final result is then transformed back tothe time-domain.
βi =1M
M
∑m=1
∥
∥
∥
∥
qi(x0,λ j)−qi−1(x0,λ j)
qi(x0,λ j)
∥
∥
∥
∥
, (8)
whereM is the length of the time history,x0 is the impactedlocation, and the subscripti represents the iteration number.
SIMULATION RESULTSIn this section, the model and system parameters of the BHA
model used in the simulations are first described. The study oflateral impact wave responses is then presented. Time-frequencyanalysis is performed and the results are discussed.
L
Bit
x
0
Neutral point
xn
z
Impact
Receiver
Receiver
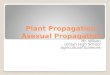
FIGURE 1. DIAGRAM OF THE BHA FOR SIMULATION.
Simulation modelA diagram of the BHA for the simulation is shown in Fig. 1.
The parameter values of the system is listed in Table 1. Dueto the strong damping effect of the mud flow and the dispersivenature of lateral waves, impact waves generated at the BHA arestrongly dissipated through propagation. Hence, the focus of thiswork is on the impact wave response at the BHA and the upperpipe is approximated as a fixed boundary condition. This as-sumption is valid based on the fact that lateral waves are highlydispersive and dissipated and will decay before propagating intothe upper pipe. The BHA often consists of parts like the bit,the drill-collar (DC) and the heavy weight drill-collar (HWDC).In this simulation, a uniform beam model with a constant crosssectional area and density is assumed in order to approximatethe structure with its mean properties and avoid reflected wavesgenerated at the interfaces between parts so that the dispersiveproperties can be better examined and analyzed without the dis-traction of complicated behavior from multiple reflections. Thisapproximation is used because the purpose of the simulation inthis section is to provide a qualitative analysis of the dispersiveproperty of the lateral wave with respect to the position of theneutral point. For the same reason, the impact force is assumedto be applied at the free-end of the BHA so that no reflectedwave will be generated at the bottom of the BHA. It is worthnoting that the free-fixed boundary condition used in this simu-lation may not be an accurate approximation of the drill-stringin the drilling process. Other boundary conditions like pinned-pinned have been used in related research [14]. However, thissimplified model combined with a properly chosen time windowcan produce a single-direction traveling wave without reflectionsand multiple wave interactions. A clear response is obtained tofacilitate the time-frequency analysis in the next step, which isthe main focus of this research. Similar approximated models inacademic research of drill-string behavior can be found in [7,14]
4 Copyright © 2014 by ASME

0 0.4 0.8 1.20
0.2
0.4
0.6
0.8
1
t (s)
Am
plitu
de (
kN)
(a) Impact force profile
0 20 40 60 80 1000
0.5
1
1.5
2
2.5
Frequency (Hz)
Am
plitu
de ×
104
(b) Spectrum
FIGURE 2. (a) IMPACT FORCE PROFILE. (b) SPECTRUM OF THE IMPACT FORCE.
t (s)
x (m
)
Velocity0 0.4 0.8 1.20
50
100
150
200
250
300
350
−0.02
−0.01
0
0.01
0.02
0.03
0.04
0.05
FIGURE 3. IMPACT WAVE PROPAGATION THROUGH THEBHA.
The gravitational field and the WOB divide the BHA intotwo sections: an upper tensile part with positive pre-stress anda lower compressive part with negative pre-stress. The relationbetween WOB and the position of the neutral point is
WOB= ρAgxn. (9)
Receivers are placed on the surface of the BHA to detectstress waves. System parameter values, force information, andthe sampling frequencies are presented in Table. 1. The impactforce profile is presented in Fig. 2(a). It has significant frequencycontent up to about 60 Hz as shown in Fig. 2(b). The choice of60 Hz is within the frequency range of impact forces which occurin the drilling process [5].
TABLE 1. SYSTEM PARAMETERS OF THE BHA.
Parameter Value
Elastic modulus,E 206 GPa
Density,ρ 7850 kg/m3
Length,L 350 m
Outer radius,r1 10.16 cm
Inner radius,r2 3.57 cm
Time window,T 1.2 s
Impact amplitude,Fm 1 kN
Impact duration,Tp 0.05 s
Sampling frequency,f 1000 Hz
Results and analysisA mesh with100 elements is used to obtain sufficient spatial
resolution in order to observe the propagating wave. A simula-tion with xn = 100 m is conducted. The impact wave propagationthrough the BHA is shown in Fig. 3. An impact force is appliedat x = 0 whent = 0.1. The amplitude of the traveling wave issignificantly reduced over time due to dispersion.
A receiver is placed atx = 73.5 m. The location of the re-ceiver can be arbitrary and has no influence on the nature of theresult. The positionx= 73.5 m is chosen since a complete waveprofile without reflection can be obtained within the given timewindow to better perform the analysis. Three cases are com-pared in simulations: (i) without gravity (WG), (ii)xn = 100 m,and (iii) xn = 200 m. The case without gravity is chosen in or-der to demonstrate the importance of including gravity into themodeling and to reproduce results from the literature [5]. The
5 Copyright © 2014 by ASME

0 0.4 0.8 1.2
−0.005
0
0.005
0.01
0.015
0.02
t (s)
Vel
ocity
(m
/s)
di
WGx
n = 100 m
xn = 200 m
FIGURE 4. COMPARISONBETWEEN PARTICLE VELOCITY RESPONSE AT THE RECEIVER FOR CASES OF WITHOUT GRAVITY (WG),xn = 100 m, andxn = 200 m.
t (s)
Fre
quen
cy (
Hz)
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
5
10
15
20
25WGx
n = 100 m
xn = 200 m
FIGURE 5. COMPARISONBETWEEN STFT RESULTS AT THE RECEIVER FOR CASES OF WITHOUT GRAVITY (WG),xn = 100 m, andxn = 200 m.
two cases ofxn = 100 m andxn = 200 m are chosen in order todemonstrate the influence of the neutral point position and WOBon the response. The particle velocity responses at the receiverare shown in Fig. 4. The case without gravity is plotted as thedashed-dotted line (green). When the propagating wave reachesthe location of the receiver, the wave shape has become distorteddue to dispersion. When gravity is present and the neutral pointis set atxn = 100 m with a WOB of 219 kN, the later part in thetime series of the response becomes further scattered, as shownby the dashed line (red) in Fig. 4. This indicates that the disper-sive property of the lateral wave is affected by the gravitationalterm in Eqn. (3). By further increasing the WOB to 438 kN, theneutral point is increased toxn = 200 m. A longer portion of theBHA is under compression and the propagating wave observedat the receiver is further distorted due to a stronger dispersive
effect, as shown by the solid line (blue) in Fig. 4.
The short time Fourier transform (STFT) is adopted to im-plement a time-frequency analysis of the response signal mea-sured at the receiver. A contour plot of the power spectral den-sity (PSD) of the signal whenxn = 200 m is shown in Fig. 5. Theisolines of the cases without gravity and ofxn = 100 m are alsoplotted in the same figure for comparison. It can be observedthat the isoline is being slightly shifted as the neutral point is in-creasing in the time ranget = 0.3 to 1. For example, att = 0.7,the curve forxn = 200 m is lower than the curves for the caseswith xn = 100 m and without gravity, which indicates that thespeeds of different frequency components are being affected andadditional dispersion has been introduced into the response. Inthe later part of the time series, the trend associated with theboundary of the frequency content becomes less distinct which
6 Copyright © 2014 by ASME

50 100 150 200 2500
0.02
0.04
0.06
0.08
Neutral point position (m)
Mea
sure
of d
ispe
rsio
n (s
)
FIGURE 6. DISPERSIONMETRIC VERSUS NEUTRAL POINTPOSITION.
correspond to the distortion of wave shape in the time-domainresponses.
A simple parametric study is also performed by varying thevalue of neutral point position from 50 m to 250 m. A metric isdefined to quantify the dispersive property by measuring the timedifference between peaks in the time-domain responses for twoconditions. The response of the case without gravity is chosen asthe reference. As shown in Fig. 4,di is defined as the time differ-ence between a peak of the response of the casexn = 200 m andthe corresponding peak of the reference. As defined in Eqn. (10),the metric of dispersion is the average time between peaks occur-ring from t = 0.3 s tot = 0.8 s, during which the wave profilesare intact and peak points can be clearly identified and compared.
d =1m
m
∑i=1
di , (10)
wherem is thenumber of peaks in this given time interval.
By varying the value of the neutral point position fromxn = 50 m toxn = 200 m with a 10 m step size, the resultingchange in the value ofd is shown in Fig. 6. By increasing thevalue of neutral point position, the value ofd increases, whichindicates strengthening dispersive behavior in the response. Thisphenomenon is consistent with the analytical study in [5] thatthe gravitational field can affect the dispersive property of thelateral wave by decreasing the group speed of certain frequencycomponents. A dangerous condition with larger amplitude vi-brations may also occur resulting from the additional dispersionintroduced by the gravitational field and the compressive internalforce in the lower part of the BHA.
Impact at BHA
Lateral impact wave
Receivers at BHA Micro-processor
Stable? False
Axial acoustic wave
Surface
FIGURE 7. NEW STABILITY MONITORING SCHEME FOR THEBHA.
STABILITY MONITORING SCHEMEAs stated before, due to the strong damping environment and
the dispersive nature of lateral waves, the amplitude of the im-pact response is significant reduced before reaching the surfaceand cannot be chosen as a reliable indicator to predict unstableconditions caused by large impacts of the BHA with the wall ofthe wellbore. Based on the analysis in the previous section, anew scheme is proposed to monitor the stability of BHA dynam-ics. A diagram of the scheme is shown in Fig. 7. When an impactwith the wall occurs, propagating stress waves through the drill-string are observed and recorded at receivers placed on the BHA.The signals are processed by using time-frequency analysis tech-niques at a micro-processor connected to the receiver. The groupspeeds of frequency content in the latter part of time series arecompared to references obtained from calibration data or numer-ical simulations. If unusual group speed values are identified forcertain frequency contents for the current WOB, an alarm signalis generated and encoded into axial stress waves transmitted byusing the existing acoustic telemetry system. This scheme doesnot require the installation of new instruments. The existing sen-sors and micro-processors in the acoustic telemetry system canbe used to detect and process the lateral waves. In this way, thepreviously neglected lateral wave information is constructivelyused for the purpose of stability monitoring.
CONCLUSIONS AND FUTURE WORKIn this paper, an iterative wavelet-based spectral finite ele-
ment technique is applied to study lateral impact wave propa-gation in a drill-string under the effects of a gravitational field.A relationship is identified between the dispersive effect intro-duced by the gravitational field and the position of the neutralpoint. When more of the BHA is under compression, strongerdispersion is introduced resulting in a distorted wave shape anda decrease in the velocity of propagating wave contents in thelatter part of time series.
7 Copyright © 2014 by ASME

The coupling effect of strong lateral deflection will be in-corporated intothe model in future work. For this condition,the geometric nonlinearity cannot be neglected and may result ina hardening effect interacting with the gravitational field on thedispersive properties of the lateral wave.
ACKNOWLEDGMENTThe support of this work from the Air Force Office of Sci-
entific Research under Grant FA9550-11-1-0108 is gratefully ac-knowledged.
REFERENCES[1] Arevalo, Y., Medina, Y., and Naslausky, A., 2011. Off-
shore: Quantifying drill vibration challenges. Tech. rep.,Schlumberger, August. http://www.slb.com.
[2] Placido, J. C. R., Santos, H. M., and DIAZ GALEANO,Y., 2002. “Drillstring vibration and wellbore instability”.Journal of energy resources technology,124(4), pp. 217–222.
[3] Poletto, F., Malusa, M., and Miranda, F., 2001. “Numeri-cal modeling and interpretation of drillstring waves”.Geo-physics,66(5), pp. 1569–1581.
[4] Gardner, W., Hyden, R., Linyaev, E., Gao, L., Robbins, C.,and Moore, J., 2006. “Acoustic telemetry delivers morereal-time downhole data in underbalanced drilling opera-tions”. In IADC/SPE Drilling Conference, Florida, USA.
[5] Carcione, J. M., Poletto, F., and Pinna, G., 2012. “Simula-tion of flexural waves in drill pipes including the effects ofthe gravitational field: Flexural waves and effects of grav-ity”. Wave Motion,50, pp. 310–325.
[6] Chin, W. C., 1994. Wave Propagation in Petroleum En-gineering: Modern Applications to Drillstring Vibrations,Measurement-while-drilling, Swab-surge, and Geophysics.Gulf Publishing Company, Houston, TX.
[7] Poletto, F., Carcione, J. M., and Pinna, G., 2013. “Flexuralwaves in drill-string tubulars with variable loads”.Geo-physical Prospecting,61, pp. 955–972.
[8] Mitra, M., and Gopalakrishnan, S., 2005. “Spectrally for-mulated wavelet finite element for wave propagation andimpact force identification in connected 1-d waveguides”.International journal of solids and structures,42(16),pp. 4695–4721.
[9] Liu, Y., and Dick, A., Submitted. “Alternating wavelet-timefinite element method: modeling and analysis of nonlinearwave propagation in 1d and 2d waveguides”.Journal ofSound and Vibration.
[10] Doyle, J., 1997.Wave Propagation in Structures. Springer,New York, NY.
[11] Pai, P. F., and Nayfeh, A. H., 1990. “Non-linear non-planaroscillations of a cantilever beam under lateral base exci-
tations”. International Journal of Non-Linear Mechanics,25(5), pp. 455–474.
[12] Carcione, J. M., and Poletto, F., 2000. “Simulation of stresswaves in attenuating drill strings, including piezoelectricsources and sensors”.The Journal of the Acoustical Societyof America, 108, pp. 53–64.
[13] Schafer, B., 1985. “Free vibrations of a gravity-loadedclamped-free beam”.Ingenieur-archiv,55(1), pp. 66–80.
[14] Spanos, P., and Payne, M., 1992. “Advances in dynamicbottomhole assembly modeling and dynamic response de-termination”. In SPE/IADC Drilling Conference, New Or-leans, USA, pp. 581–590.
8 Copyright © 2014 by ASME