Embed Size (px)
Citation preview

73
有限要素法
• 概要
• 弱形式,要素分割,変位の有限要素基底による近似,ガラーキン法の適用
• 仮想仕事の原理
• 弱形式と強形式
• 最小ポテンシャルエネルギーの原理
• 重み付き残差法と弱形式
• ラグランジュ定数による変位規定境界条件の考慮
• 1次元問題の例
• 2次元問題の例
• 要素座標のパラメータと各種要素
• ガウスの数値積分公式
• 応力の計算

74
有限要素法
• 概要
• 弱形式,要素分割,変位の有限要素基底による近似,ガラーキン法の適用
• 仮想仕事の原理
• 弱形式と強形式
• 重み付き残差法と弱形式
• 1次元問題の例
• 2次元問題の例
• 要素座標のパラメータと各種要素
• ガウスの数値積分公式
• 応力の計算

有限要素法の流れ
75
弱形式仮想仕事の原理,最小ポテンシャルエネルギーの原理,重み付き残差法,ガラーキン法
要素分割(要素形状)
形状関数(有限要素基底)
連立方程式
解
∫
!(∇u · ∇w + bw) d! =
∫
"t
tw d"
u = N 1u1 + N 2u2 + N 3u3 + N 4u4 + · · ·
[K ] {u} = {F}

仮想仕事の原理
76
釣合状態(平衡状態)において,幾何学的境界条件(変位規程境界条件を満足する変位 u (可容変位)の変分δu(仮想変位)とすると,釣合状態にあり,力学的境界条件を満足している応力(可容応力)が,仮想変位に対してなす仕事(内部仕事)は,外力と物体力が仮想変位に対してなす仕事(外部仕事)に等しい.このことを仮想仕事の原理という.
x
L dxσ σ + dσ
δu δu + d(δu)b
左端が固定された断面積A,長さLの棒の外力が仮想変位に対してなす仕事はWは次のようになる.
左端では,仮想変位δu = 0であるから,左端の外力の仕事 (= 0)を追加して変形すると次のようになる.
W =∫ L
0b δu dV + Aσ (L)δu(L)
W = A∫ L
0b δu dx + Aσ (L)δu(L) − Aσ (0)δu(0)
σ (L)
(次ページに続く)

77
(式変形の続き)
釣合方程式より= 0
積分の形に戻す
W = A∫ L
0b δu dx + Aσ (L)δu(L) − Aσ (0)δu(0) = A
∫ L
0b δu dx + A
∫ L
0
d(σ δu)
dxdx
= A∫ L
0b δu dx + A
∫ L
0
dσ
dxδu dx + A
∫ L
0σ
d(δu)
dxdx
= A∫ L
0
(dσ
dx+ b
)δu dx + A
∫ L
0σ
d(δu)
dxdx
= A∫ L
0σ
d(δu)
dxdx
= A∫ L
0σδε dx
δuに対応するひずみ外力が仮想変位に対してなす仕事は内部応力がなす仕事に等しい
A∫ L
0σδε dx = A
∫ L
0b δu dx + Aσ (L)δu(L) 仮想仕事の原理

78
仮想仕事の原理(一般の場合)
W =∫
!(bxδu + byδv + bzδw) d! +
∫
#t
(txδu + tyδv + tzδw) d#
=∫
!(bxδu + byδv + bzδw) d! +
∫
#t +#u
(txδu + tyδv + tzδw) d#
=∫
!(bxδu + byδv + bzδw) d!
+∫
#{(σxx nx + σyx ny + σzx nz)δu + (σxynx + σyyny + σzynz)δv
+ (σxznx + σyzny + σzznz)δw} d#
=∫
!(bxδu + byδv + bzδw) d!
+∫
#{(σxxδu + σxyδv + σxzδw)nx + (σyxδu + σyyδv + σyzδw)ny
+ (σzxδu + σzyδv + σzzδw)nz} d#
(次ページに続く)
物体力の仮想仕事 表面力の仮想仕事
変位規定の境界も追加
コーシーの公式により表面力を応力で表現
外向き単位法線ベクトルの成分でまとめる

79
(式変形の続き)
W = · · ·
=∫
!(bxδu + byδv + bzδw) d!
+∫
!
{∂(σxxδu + σxyδv + σxzδw)
∂x+
∂(σyxδu + σyyδv + σyzδw)
∂y
+∂(σzxδu + σzyδv + σzzδw)
∂z
}d!
=∫
!(bxδu + byδv + bzδw) d!
+∫
!
{(∂σxx
∂x+
∂σyx
∂y+ ∂σzx
∂z
)δu +
(∂σxy
∂x+
∂σyy
∂y+
∂σzy
∂z
)δv
+(
∂σxz
∂x+
∂σyz
∂y+ ∂σzz
∂z
)δw
}d!
+∫
!
{σxx
∂(δu)
∂x+ σyy
∂(δv)
∂y+ σzz
∂(δw)
∂z
+ σxy
(∂(δu)
∂y+ ∂(δv)
∂x
)+ σyz
(∂(δw)
∂y+ ∂(δv)
∂z
)+ σzx
(∂(δw)
∂x+ ∂(δu)
∂z
)}d!
(次ページに続く)
発散定理により領域積分に変換法線ベクトルはその方向の偏微分にし,境界積分を領域積分に変える.
仮想変位の成分でまとめる
残りの仮想変位の微分の項をまとめるまとめる際に応力テンソルの対称性を利用
工学剪断ひずみ垂直ひずみ
γxyεx

80
(式変形の続き)
剪断応力,工学剪断ひずみの表現を利用
釣合い方程式よりこれらは0
したがって,一般の場合の仮想仕事の原理は次のようになる.
これを簡潔に書くと次のようになる.
W = · · ·
=∫
!
{(∂σxx
∂x+
∂σyx
∂y+ ∂σzx
∂z+ bx
)δu +
(∂σxy
∂x+
∂σyy
∂y+
∂σzy
∂z+ by
)δv
+(
∂σxz
∂x+
∂σyz
∂y+ ∂σzz
∂z+ bz
)δw
}d!
+∫
!(σxδεx + σyδεy + σzδεz + τxyδγxy + τxyδγxy + τxyδγxy) d!
=∫
!(σxδεx + σyδεy + σzδεz + τxyδγxy + τxyδγxy + τxyδγxy) d!
∫
!(σxδεx + σyδεy + σzδεz + τxyδγxy + τxyδγxy + τxyδγxy) d!
=∫
!(bxδu + byδv + bzδw) d! +
∫
't
(txδu + tyδv + tzδw) d'
∫
!!δε"{σ } d! =
∫
!!δu"{b} d! +
∫
%t
!δu"{t} d%

81
仮想仕事の原理(弱形式)
∫
!(σxδεx + σyδεy + σzδεz + τxyδγxy + τxyδγxy + τxyδγxy) d!
=∫
!(bxδu + byδv + bzδw) d! +
∫
't
(txδu + tyδv + tzδw) d'
弱形式と強形式
仮想仕事の原理の導出過程で,釣合い方程式および力学的境界条件が用いられている.また,仮想仕事の原理から部分積分の公式を逆向きに適用して変形していくと,釣り合い方程式と力学的境界条件が得られる.したがって,仮想仕事の原理は,釣り合い方程式と力学的境界条件に等価である.
仮想仕事の原理の式を一般に弱形式という.
これに対して,もとの微分方程式と境界条件の組み合わせを強形式という.
または∫
!!δε"{σ } d! =
∫
!!δu"{b} d! +
∫
%t
!δu"{t} d%

最小ポテンシャルエネルギーの原理
82
応力成分がひずみエネルギー密度関数の導関数として表されるものとする.
等方線形弾性体の場合のひずみエネルギー密度関数は,次のようになる.
たとえばU 0のεxに対する導関数がσxとなっていることが次のように確かめられる.
また,表面力や物体力が保存力であり,それらのポテンシャルをVT,VBとすると,
{σ } ={
∂U0
∂ε
}
U0 = 12(σxεx + σyεy + σzεz + τxyγxy + τyzγyz + τzxγzx )
= νE2(1−2ν)(1+ν) (εx + εy + εz)
2 + E2(1+ν)
(ε2
x + ε2y + ε2
z + 12γ 2
xy + 12γ 2
yz + 12γ 2
zx
)
∂U0
∂εx= νE
(1 − 2ν)(1 + ν)(εx + εy + εz) + E
1 + νεx = σx
{t} ={−∂VT
∂t
}, {b} =
{−∂VB
∂b
}

83
したがって,仮想仕事の原理は次のようになる.
ここで,
∫
!!δε"
{∂U0
∂ε
}d! =
∫
!!δu"{−∂VB
∂u} d! +
∫
%t
!δu"{−∂VT
∂u} d%
∫
!δU0 d! = −
∫
!δVB d! −
∫
#t
δVT d#
! =∫
"U0 d" +
∫
"VB d" +
∫
#t
VT d#
δ
(∫
"U0 d" +
∫
"VB d" +
∫
#t
VT d#
)= 0
を全ポテンシャルエネルギーという.物体力と表面力が死荷重(仮想変位を与えても値が変化しない荷重)のときは,VBとVTはそれぞれ
となり,Πは次のようになる.! =
∫
"U0 d" −
∫
""u#{b} d" −
∫
#t
"u#{t} d#
=∫
"U0 d" −
∫
"bi ui d" −
∫
#t
ti ui d#
VB = −"u#{b} = −bi ui , VT = −"u#{t} = −ti ui
U0の変分

84
最小ポテンシャルエネルギーの原理Ω内で連続で,Γu上で変位の境界条件を満足するすべての許容される変位成分の中で,正解となるものは全ポテンシャルエネルギーΠを最小にする.詳細は省略するが,δΠ = 0 とすると,
!" = "(u + δu) − "(u) = δ" + δ2" = δ2" > 0が示せて,
!(u + δu) > !(u)
となることが分かる.
特に線形弾性体の場合,U0 = 1
2!ε"{σ } = 1
2!ε" [D] {ε}
であるから,! = 1
2
∫
"!ε" [D] {ε} d" −
∫
"!u"{b} d" −
∫
$t
!u"{t} d$
よって,δΠ = 0 は次のように仮想仕事の原理と同じ弱形式が得られる.δ" =
∫
#!δε" [D] {ε} d# −
∫
#!δu"{b} d# −
∫
%t
!δu"{t} d%
=∫
#!δε"{σ } d# −
∫
#!δu"{b} d# −
∫
%t
!δu"{t} d% = 0

重み付き残差式と弱形式
85
微分方程式を直接解く代わりに,近似解を微分方程式に代入したときの誤差に重みをかけ,領域全体で積分したものを0となるように近似解を構成する方法を,重み付き残差法という.重み付き残差法の式を出発点として,部分積分を行うと有限要素法で用いる弱形式が得られる.
以下,簡単のため添字記号を用いて説明する.
Γuで0となる を重み関数とするとし,次の積分を考える.w j
左辺第1項を部分積分すると次にようになる.∫
!t j u∗
j d! −∫
"σi j u∗
j,i d" =∫
!t j u∗
j d! − 12
∫
"σi j (u∗
j,i + u∗j,i ) d"
=∫
!t j u∗
j d! − 12
∫
"(σi j u∗
j,i + σ j i u∗j,i ) d" =
∫
!t j u∗
j d! − 12
∫
"(σi j u∗
j,i + σi j u∗i, j ) d"
=∫
!u+!t
t j u∗j d! −
∫
"σi jε
∗i j d" =
∫
!t
ti u∗i d! −
∫
"σi jε
∗i j d"
∫
!(σi j,i + b j )u∗
j d! = 0

86
したがって,下の式は次のようになる.∫
!t
ti u∗i d! −
∫
"σi jε
∗i j d" +
∫
"b j u∗
j d" = 0
この式の左辺第1項のt iは,近似解に関係づけられる表面力であるので,この部分を力学的境界条件に一致するようすするために,重み付き残差式として,次の形を出発点とする.∫
!(σi j,i + b j )u∗
j d! −∫
#t
(t j − t j ) d# = 0
この式は,領域内部で近似解による微分方程式の残差と境界上の残差を0とする形になっている.この式の左辺を部分積分すると,次の弱形式が得られる.
重み関数として,仮想変位を考えれば,仮想仕事の原理から導出される弱形式と一致していることが分かる.
∫
!σi jε
∗i j d! =
∫
!bi u∗
i d! +∫
$t
ti u∗i d$

87
ラグランジュ乗数を用いた変位規定境界条件の組み込み最小ポテンシャルエネルギーの原理において,ラグランジュ乗数を用いて変位規定境界条件を組み込む.すなわち,
! = 12
∫
"σi jεi j d" −
∫
"bi ui d" −
∫
%t
ti ui d% −∫
%u
λi (ui − ui ) d%
第1変分をとると,
δ" = 12
∫
#σi jδεi j d# −
∫
#biδui d# −
∫
&t
tiδui d& −∫
&u
δλi (ui − ui ) d& −∫
&u
λiδui d&
ここで,部分積分により,∫
!σi jδεi j d!
∫
%u+%t
tiδui d% −∫
!σi j,iδu j d!
よって,δ" = −
∫
#(σi j,i + b j )δu j d# −
∫
#biδui d# +
∫
%t
(ti − ti )δui d%
−∫
%u
(λi − ti )δui d% −∫
%u
δλi (ui − ui ) d%
Γu で δui = 0 でなくてよい.

88
(続き)
δΠ = 0の条件より,σi j,i + b j = 0
ti = ti
λi = ti , ui = ui
!( 内で)
!t( 上で)
!u( 上で)
すなわち,ラグランジュ定数はΓu上で表面力の意味を持ち,変位規定境界条件を満足するようにできることが分かる.
δΠの第1項を部分積分して得られる弱形式は,次のようになる.
δ" = −∫
#(σi j,i + b j )δu j d# +
∫
%t
(ti − ti )δui d%
−∫
%u
(λi − ti )δui d% −∫
%u
δλi (ui − ui ) d%
∫
!σi jδεi j d! =
∫
!b jδu j d! +
∫
%t
tiδui d%
+∫
%u
(λi − ti )δui d% +∫
%u
δλi (ui − ui ) d%

89
弱形式に基づく有限要素法(1次元問題の例)
強形式
x
Lσ (L)
断面積A
重み付き残差式
dσ
dx+ b = 0, u(0) = 0, σ (L) = F/A
∫ L
0w
(dσ
dx+ b
)Adx = 0
1回部分積分することにより弱形式が得られる.
Hookeの法則,変位・ひずみ関係式を用いると次のようになる.∫ L
0
dw
dxE
dudx
Adx =[wσ A
]L
0+
∫ L
0b Adx = 0
[wσ A
]L
0−
∫ L
0
dw
dxσ Adx +
∫ L
0b Adx = 0

90
有限要素法
方針
領域を要素に分割し,積分を要素ごとに評価する(この例では区間に分割)
解を形状関数を用いて節点値の線形結合として近似
重み関数(仮想変位)に同じ基底関数を用いる
連立方程式
弱形式を求める∫ L
0
dw
dxE
dudx
Adx =[wσ A
]L
0+
∫ L
0b Adx = 0
有限要素基底の導入
ガラーキン法

91
要素分割と変位の近似
次のように,区間をいくつかの小区間(ここでは幅Δで4等分割)に分割して,積分を区間ごとに評価する.
= L
u
0x
Δ 2Δ 3Δ 4Δu1
u2
u3u4
u5
u を下の図のように区間ごとに u の近似値(節点値)を直線で結んだものとして近似する.
∑
e
∫
!e
dw
dxE
dudx
Adx = w(L)σ (L)A − w(0)σ (0)A +∑
e
∫
!e
b Adx = 0

92
このとき,u は次のように書くことができる.
u(x) ≈5∑
a=1
N a(x)ua
N a(x) は形状関数と呼ばれ,この近似の場合次のような関数である.
0x
ua
1
xa xa+1xa–1
N a(x)
形状関数は,考えている節点で1,考えている節点から隣接する節点まで連続的に,0に変化し,考えている節点を含まない要素ではすべての点で0となる関数である.

93
要素 e に着目すると,u(x) は要素 e 内のでは次のように書ける.
u = N e(x)ue + N e+1(x)ue+1
要素 e 内では,Ne(x)とNe+1(x) は次の図のようになっている.
0x
1
xe+1xe Δ
N e+1(x)N e(x)
このとき要素 e 内での u(x) は下の図のように変化する.
N e+1(x) = x − xe
xe+1 − xe = x − xe
!
N e(x) = 1 − x − xe
xe+1 − xe = xe+1 − x!
0
1
xe+1xe Δ
N e+1(x)N e(x)
u
ue(x)ue+1(x)
x

94
弱形式の重み関数を考える.
重み関数には,ある特定の節点の仮想的な変位(仮想変位)を用いる.この節点を節点aとすると,
このとき,節点aを含まない要素の積分はすべて0となり,節点aを含む要素のみ積分を計算すればよいことが分かる. 逆に,ある要素 e の積分を行う場合,要素内の節点に仮想的変位を与える場合のみが積分の計算対象となることがわかる. したがって,この例の場合は要素eの積分に対しては仮想変位を与えるのは節点eの場合と節点e+1の場合ということになる.
要素Δeの積分は次のようになる.
w = w(x) = N a(x)wa
すなわち,
∑
e
∫
!e
dw
dxE
dudx
Adx = w(L)σ (L)A − w(0)σ (0)A +∑
e
∫
!e
b Adx = 0
wa∑
e
∫ xe+!
xe
d N a
dxE
dudx
Adx = wa N a(L)σ (L)A − wa N a(0)σ (0)A + wa∑
e
∫ xe+!
xeN ab Adx = 0
∑
e
∫ xe+!
xe
d N a
dxE
dudx
dx = N a(L)σ (L) − N a(0)σ (0) +∑
e
∫ xe+!
xeN ab dx = 0

95
要素e内の変位の導関数は次のようになる.
dudx
= d N e
dxue + d N e+1
dxue+1 = !d N e
dxd N e+1
dx"{
ue
ue+1
}
ここでd N e
dx= −1
!,
d N e+1
dx= 1
!
であるから,
まず のときを考えるとw = N ewe
ke,e1 = E
!, ke,e
2 = −E!
∫ xe+!
xe
d N e
dxE
dudx
dx =∫ xe+!
xe
d N e
dxE
[d N e
dxd N e+1
dx
] {ue
ue+1
}
dx
=[∫ xe+!
xe
d N e
dxE
d N e
dxdx
∫ xe+!
xe
d N e
dxE
d N e+1
dxdx
] {ue
ue+1
}
≡[ke,e
1 ke,e2
]{
ue
ue+1
}

96
ただし,
物体力の積分についても同様に考えると, のとき
同様に のときは次のようになる.w = N e+1we+1
∫ xe+!
xe
dw
dxE
dudx
dx =[ke+1,e
1 ke+1,e2
] {ue
ue+1
}
ke+1,e1 = −E
!, ke+1,e
2 = E!
∫ xe+!
xeN eb dx =
[!
3!
6
] {be
be+1
}
= Se,e
w = N ewe
のときw = N e+1we+1
∫ xe+!
xeN eb dx =
[!
6!
3
] {be
be+1
}
= Se+1,e

97
以上をまとめると,仮想変位 we (e=2, 3, 4) に対しては,
すなわち,
左端の要素を積分するときには,積分結果が 0 にならないのは w = N1w1 または w = N2w2 の場合のみである.w = N1w1 のときは x = 0 で N1(0) = 1 となるから,右辺の (0)の項は考える必要があるが,N5(L)=0であるから (L)の項は0となる.
右端 x = L を含む要素(この場合はΔ4)では,w = N4w4 または w = N5w5 の場合に積分結果が 0 とならない.特に w = N5w5 のときは, x = L で N5 = 1となるから,右辺の (L) の項を考える必要がある.
w = N2w2, N3w3, N4w4 のときは,右辺の応力に関する項は 0 となる.
σ σ
σ
[ke,e−1
1 ke,e−12
] {ue−1
ue
}
+[ke,e
1 ke,e2
]{
ue
ue+1
}
− (Se,e−1 + Se,e) = 0
[ke,e−1
1 ke,e−12 + ke,e
1 ke,e2
]
ue−1
ue
ue+1
= Se,e−1 + Se,e

98
左端 x = 0に仮想変位を与えるとき,すなわちw = N1w1 に対しては,次のようになる.
以上をまとめると,
[k5,4
1 k5,42
] {u4
u5
}
= S5,4 + σ (L)
左端 x = 0に仮想変位を与えるとき,すなわちw = N5w5 に対しては,次のようになる.
E!
−E! 0 0 0
−E!
2E!
−E! 0 0
0 −E!
2E!
−E! 0
0 0 −E!
2E!
−E!
0 0 0 −E!
E!
u1
u2
u3
u4
u5
=
S1,1 − σ (0)
S2,1 + S2,2
S3,2 + S3,3
S4,3 + S4,4
S5,4 + σ (L)
[k1,1
1 k1,12
] {u1
u2
}
= S1,1 − σ (0)

99
は左端の変位であり,変位規定境界条件より既知量である.したがって,(対応する列) × を右辺に移項するとともに,1行目を別に分けて書くと次のようになる.
u1
u1
2E!
−E! 0 0
−E!
2E!
−E! 0
0 −E!
2E!
−E!
0 0 −E!
E!
u2
u3
u4
u5
=
S2,1 + S2,2 + E! u1
S3,2 + S3,3
S4,3 + S4,4
S5,4 + σ (L)
すなわち[K ] {u} = {F}
および
この式は,すべての節点の変位が得られたあとで,変位既知の左端の応力(節点反力)を計算するために用いられる.
[ E!
−E! 0 0 0
]
u1u2
u3
u4
u5
= S1,1 − σ (0)

100
これを解くと,正解が次のように得られる.
特に,u1 = 0,物体力が存在しないときは,次のようになる.∫
!
wqi,i d! = 0
∫
"
wqini d" −∫
!
wi qi d! = 0
∫
!
wi qi d! =∫
"
wqini d"
qi = −ki∂T
∂xi
∫
!
w,i
(−ki
∂T
∂xi
)d! =
∫
"
wqn d"
For two-dimensional case,
∫
!
[∂w
∂x
(−kx
∂T
∂x
)+ ∂w
∂y
(−ky
∂T
∂y
)]d! =
∫
"
wqn d"
∫
!
(∂w
∂x
∂w
∂y
) [−kx 0
0 −ky
]
∂T
∂x
∂T
∂y
d! =
∫
"
wqn d"
T =3∑
b=1NbT b
∂T
∂x=
3∑
b=1
∂Nb
∂xT b
∫
$
wi
(−ki
∂T
∂xi
)d$ =
∫
"
wqini d"
7
E!
2 −1 0 0−1 2 −1 00 −1 2 −10 0 −1 1
u2
u3
u4
u5
=
000
σ (L)
u2 = σ (L)"
E, u3 = 2σ (L)"
E, u4 = 3σ (L)"
E, u5 = 4σ (L)"
E
また,x=0の応力(反力)は次のように得られる.
σ (0) = −[ E
"−E" 0 0 0
]
u1u2
u3
u4
u5
= σ (L)

変位規定境界条件を弱形式に組み込む場合
101
∫ L
0σδε Adx =
∫ L
0bδu Adx +
[Aσ (x)δu(x)
]L
0
ラグランジュ乗数を使って,変位規定境界条件を制約条件として組み込む方法は,結局次の弱形式で変位規定境界条件が科されている境界においても0でない仮想変位を考えるかわりに,その境界の節点値に境界条件値を規定することに帰着する.
この式から次の連立方程式が得られる.
右辺に移項
x = 0 の節点反力を求めるために使用
AE!
1 −1 0 0 0
−1 2 −1 0 0
0 −1 2 −1 0
0 0 −1 2 −1
0 0 0 −1 1
u1
u2
u3
u4
u5
=
−Aσ (0)
0
0
0
Aσ (L)

102
結局,次の2組の式に帰着する.
AE!
2 −1 0 0
−1 2 −1 0
0 −1 2 −1
0 0 −1 1
u2
u3
u4
u5
=
AEu1!
0
0
Aσ (L)
−Aσ (0) = AE"
"1 − 1 0 0 0#
u1u2u3u4u5
(i) 未知変位を求める式
(ii) 変位規定境界における節点反力を求める式
(a)
(b)
未知変位を式(a)より求めた後,それらを式(b)に代入すると,x=0の応力が次のように得られる.
σ (0) = σ (L)

103
まとめ
• 要素ごとに積分
• 要素ごとの積分結果が0とならない場合は,仮想変位(重み関数)がその要素の節点変位の時のみ.積分の結果は,全体のマトリックスの,仮想変位の節点番号に対応する行,積分を計算する要素の節点番号に対応する列に足し込む.
• 物体力などから計算される等価節点力は,右辺のベクトルの仮想変位に対応する行に足し込む.
• 表面力が規定されている境界の節点を含む要素を積分するときは,仮想変位が境界節点に対応するときは境界積分を計算し,得られた等価節点力を対応する行に足し込む.

104
2次元弾性問題における有限要素法弱形式
ただし,
[D] = E(1 + ν)(1 − 2ν)
1 − ν ν 0
ν 1 − ν 00 0 1−2ν
2
εxεyγxy
=
∂∂x 0
0 ∂∂y
∂∂y
∂∂x
{uv
}
∫
!(σxδεx + σyδεy + τxyδγxy) d! =
∫
!(bxδu + byδv) d! +
∫
't
(txδu + tyδv) d'
σxδεx + σyδεy + τxyδγxy = !δεx δεy δγxy" [D]
εxεyγxy

要素分割(三角形)
105
弱形式
形状関数を用いた変位の近似{
uv
}= N 1
{u1
v1
}+ N 2
{u2
v2
}+ N 3
{u3
v3
}+ · · ·
N a
a
1
∑
e
∫
!e!δεx δεy δγxy" [D]
εxεyγxy
d%
=∑
e
∫
!e!δu δv"
{bxby
}d% +
∑
k
∫
&kt
!δu δv"{
txty
}d&

106
それぞれの三角形に対しては,形状関数はそれぞれ次のような分布そしている.
1
2
3
1
1 3
2
1
1
2
3
1

107
三角形1次要素の形状関数の具体形
1
2
3
1
1 3
2
1
1
2
3
1

要素ごとの積分の計算
108
形状関数の導関数∂ N 1
∂x= B1
2",
∂ N 1
∂y= C1
2"
∂ N 2
∂x= B2
2",
∂ N 2
∂y= C2
2"
∂ N 3
∂x= B3
2",
∂ N 3
∂y= C3
2"
εxεyγxy
=
∂ N 1
∂x 0
0 ∂ N 1
∂y∂ N 1
∂y∂ N 1
∂x
{u1
v1
}
+
∂ N 2
∂x 0
0 ∂ N 2
∂y∂ N 2
∂y∂ N 2
∂x
{u2
v2
}
+
∂ N 3
∂x 0
0 ∂ N 3
∂y∂ N 3
∂y∂ N 3
∂x
{u3
v3
}
=3∑
j=1
∂ N j
∂x 0
0 ∂ N j
∂y∂ N j
∂y∂ N j
∂x
{u j
v j
}
=3∑
j=1
[B j
] {u j
v j
}
一定

要素ごとの積分の計算(続き)
∫
!e!δεx δεy δγxy" [D]
εxεyγxy
d% = !δui δvi"3∑
j=1
(∫
!e
[Bi ][D
][B j ] d%
) {u j
v j
}
= !δui δvi"3∑
j=1
[ki j ]
{u j
v j
}
!δεx δεy δγxy" =! δui δ vi"[Bi ]T
εxεyγxy
=3∑
j=1
[B j ]
{u j
v j
}+
三角形線形要素のときは一定値
ひずみ,仮想ひずみを形状関数で表すと,結局次のようになる.
∑
e
∫
!e!δεx δεy δγxy" [D]
εxεyγxy
d%
=∑
e
∫
!e!δu δv"
{bxby
}d% +
∑
k
∫
&kt
!δu δv"{
txty
}d&

領域積分が0でない値となるとき
ek
i
je
k
i
je
k
i
j
左図の赤丸ように,仮想変位が積分を評価する要素外の節点の変位のときは,要素eの領域積分の値は0となる.(仮想変位の形状関数の値が要素e内では常に0となるから.)
ek
i
j
仮想変位を与える節点(上図の赤丸)が積分を評価する要素内の節点のいずれかの節点の変位のとき
110

要素の局所節点番号と大域的節点番号
111
要素の局所節点番号には,対応する大域的節点番号がある.要素ごとの積分の計算により,要素ごとの局所節点数の積分結果が得られる.これをマトリックスの大域的節点番号に対応する列,行の位置に格納する.
1
2
3
ek
i
j
e
要素 e の局所節点番号 要素 e の大域的節点番号

表面力の境界積分の評価
112
仮想変位を与える節点が境界上の節点と一致するときは,その節点を含む境界の積分も計算しなければならない.
線分境界上の点の座標は,パラメータを用いて次のように書ける.
図の点 i で仮想変位を考え,i j 間の線分境界上の境界積分を評価する.この辺をΔStとすると
x = xi + 1 + ξ
2(x j − xi ), −1 ≤ ξ ≤ 1
表面力も同様に直線上に変化するものとすると,
t = ti + 1 + ξ
2(t j − ti ), −1 ≤ ξ ≤ 1
また,積分をパラメータξで評価するものとすると,
d! =
√(dxdξ
)2+
(dydξ
)2dξ = L
2dξ
i
j
k
L
∫
!"t
(δu tx + δv ty) d" =∫
!"t
!N iδui N iδvi"{
txty
}d"

113
Ni(x, y) は境界上では節点 i で1,節点 j で 0 となり,節点 i と j を直線で結んだ形となるので,パラメータξを用いると
N i (x, y) = 1 − ξ
2
となる.以上より,
∫
!"t
(δu tx + δv ty) d" = !δui δvi"∫ 1
−1
(1−ξ
2
)2t ix + 1−ξ2
4 t jx
(1−ξ
2
)2t iy + 1−ξ2
4 t jy
L2
dξ
= !δui δvi"
L3 t i
x + L6 t j
x
L3 t i
y + L6 t j
y
節点 j で仮想変位を考える場合も同様に計算できる.
∑ ∫
!"kt
(δu tx + δv ty) d" = !δui δvi"
∑ (L3 t i
x + L6 t j
x
)
∑ (L3 t i
y + L6 t j
y
)
= !δui δvi"
{Fi
x
Fiy
}

全体の連立方程式の組み立て離散化された弱形式
∑
e
∫
!e!δεx δεy δγxy" [D]
εxεyγxy
d% =∑ ∫
!&t
!δu δv"{
txty
}d&
∑ ∫
!"kt
(δu tx + δv ty) d" = !δui δvi"{
Fix
Fiy
}
!δu δv"
n∑
j=1
[ki j ]
{u j
v j
}−
{Fi
x
Fiy
}
= 0
∑
e
∫
!e!δεx δεy δγxy" [D]
εxεyγxy
d% = !δui δvi"n∑
j=1
[ki j ]
{u j
v j
}
K {u} = {F}
積分の評価
代数方程式

115
形状関数のパラメータ表示
x
y
x1
x2
x3
x4
0
−1
1
1
−1
x1(−1, −1) x2(1, −1)
x3(1, 1)x4(−1, 1)
ξ
η
ξ
u2
u3u4
u1
0
−1
1
1
−1
η

116
∂ N b
∂ξ= ∂ N b
∂x∂x∂ξ
+ ∂ N b
∂y∂y∂ξ
∂ N b
∂η= ∂ N b
∂x∂x∂η
+ ∂ N b
∂y∂y∂η
∂ N b
∂ξ
∂ N b
∂η
= J
∂ N b
∂x∂ N b
∂y
2次元の要素の形状関数の実座標による導関数とパラメータによる導関数の関係を求める.
∂ N b
∂x∂ N b
∂y
= J−1
∂ N b
∂ξ
∂ N b
∂η
[ka,b
j]
=∫
!"b
[Ba]T[
D][
B j ] d"
d! =∣∣∣∣∂x∂ξ
× ∂x∂η
∣∣∣∣ dξdη
積分をパラメータで実行するための面積要素
∂ N b
∂ξ
∂ N b
∂η
=
∂x∂ξ
∂y∂ξ
∂x∂η
∂y∂η
∂ N b
∂x
∂ N b
∂y

117
3次元のソリッド要素
ξ
η
ζ
1
23
4
5
67
8
N 1 = 18(1 − ξ)(1 − η)(1 − ζ ), N 2 = 1
8(1 + ξ)(1 − η)(1 − ζ )
N 3 = 18(1 + ξ)(1 + η)(1 − ζ ), N 4 = 1
8(1 − ξ)(1 + η)(1 − ζ )
N 1 = 18(1 − ξ)(1 − η)(1 + ζ ), N 2 = 1
8(1 + ξ)(1 − η)(1 + ζ )
N 3 = 18(1 + ξ)(1 + η)(1 + ζ ), N 4 = 1
8(1 − ξ)(1 + η)(1 + ζ )
8節点六面体要素の形状関数

118
∂ N b
∂x∂ N b
∂y∂ N b
∂z
= J−1
∂ N b
∂ξ
∂ N b
∂η
∂ N b
∂ζ
d! =(
∂x∂ξ
× ∂x∂ξ
)· ∂x∂η
dξdηdζ = det J dξdηdζ
積分をパラメータで実行するための体積要素
形状関数の導関数
∂ N b
∂ξ
∂ N b
∂η
∂ N b
∂ζ
=
∂x∂ξ
∂y∂ξ
∂z∂ξ
∂x∂η
∂y∂η
∂z∂η
∂x∂ζ
∂y∂ζ
∂z∂ζ
∂ N b
∂x∂ N b
∂y∂ N b
∂z
= J
∂ N b
∂x∂ N b
∂y∂ N b
∂z

119
数値積分(ガウスの数値積分公式) ∫ 1
−1f (ξ) dξ =
n∑
i=1
f (ξi )wi
ξi , wi (i = 1, 2, · · · , n) はそれぞれ積分点の座標と重み.
n
0 1 2.000 000 000 000 000
0.577 350 269 189 626 2 1.000 000 000 000 000
0.774 596 669 241 4830.000 000 000 000 000
3 0.555 555 555 555 5560.888 888 888 888 889
0.861 136 311 594 0530.339 981 043 584 856
4 0.347 854 845 137 4540.652 145 154 862 546
±ξi wi
積分区間の変換
∫ b
af (x) dx =
∫ 1
−1f(
b − a2
ξ + b + a2
)b − a
2dξ
x = b − a2
ξ + b + a2
と変数変換すると,

2重積分,3重積分の数値積分
120
∫ 1
−1
∫ 1
−1
∫ 1
−1f (ξ, η, ζ ) dξdηdζ =
n∑
i=1
n∑
j=1
n∑
k=1
f (ξi , η j , ζk) wiw jwk
∫ 1
−1
∫ 1
−1f (ξ, η) dξdη =
n∑
i=1
n∑
j=1
f (ξi , η j ) wiw j

応力の計算
121
εxεyγxy
=n∑
j=1
∂ N j
∂x 0
0 ∂ N j
∂y∂ N j
∂y∂ N j
∂x
{u j
v j
}
=n∑
j=1
[B j
] {u j
v j
}
1要素の総節点数をnとしたとき,要素内のある点のひずみは次式の用に形状関数の導関数から計算される.
応力は,これをフックの法則に代入して計算する.すなわち,
[D] = E(1 + ν)(1 − 2ν)
1 − ν ν 0
ν 1 − ν 00 0 1−2ν
2
σxσyτxy
= [D]
εxεyγxy
=[
D] n∑
j=1
[B j
]{ u j
v j
}
ただし,

応力の計算
122
σxσyτxy
= [D]
εxεyγxy
=[
D] n∑
j=1
[B j
]{ u j
v j
}
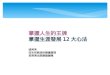
応力を計算する点は,要素積分で用いるガウスポイント(ガウスの数値積分公式の積分点)を用いる.ガウスポイントにおける形状関数の導関数を計算して,上式のマトリックス[Bj]を計算して各点の応力を計算し,さらに主応力,応力テンソルの不変量,八面体剪断応力を計算し,要素内で補間してコンター図などを表示する.
ξ
η
x
y
x
y
x
y
ガウスポイント 実空間での評価点 主応力・主方向 相当応力コンター図

123
有限要素法のまとめ
• 弱形式,要素分割,変位の有限要素基底による近似,ガラーキン法の適用
• 弱形式と強形式
• 重み付き残差法と弱形式
• 1次元問題の例
• 2次元問題の例
• 要素座標のパラメータと各種要素
• ガウスの数値積分公式
• 応力の計算