Embed Size (px)
Citation preview
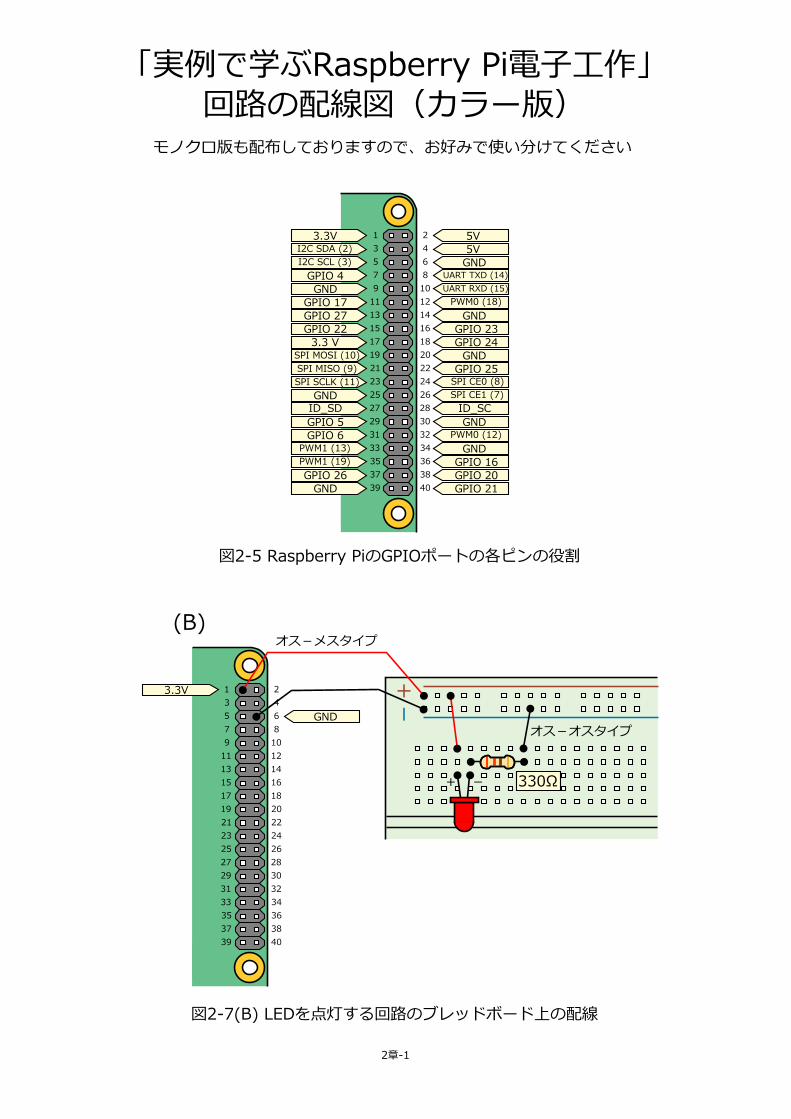
「実例で学ぶRaspberry Pi電⼦⼯作」回路の配線図(カラー版)
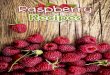
図2-7(B) LEDを点灯する回路のブレッドボード上の配線
2章-1
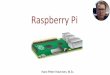
図2-5 Raspberry PiのGPIOポートの各ピンの役割
モノクロ版も配布しておりますので、お好みで使い分けてください
13579
11
2468
1012
13151719212325
14161820222426
5V5VGND
UART TXD (14)UART RXD (15)
PWM0 (18)GND
GPIO 23GPIO 24
GNDGPIO 25
SPI CE0 (8)SPI CE1 (7)
27293133353739
28303234363840
ID̲SCGND
PWM0 (12)GND
GPIO 16GPIO 20GPIO 21
3.3VI2C SDA (2)I2C SCL (3)
GPIO 4GND
GPIO 17GPIO 27GPIO 22
3.3 VSPI MOSI (10)SPI MISO (9)SPI SCLK (11)
GNDID̲SDGPIO 5GPIO 6
PWM1 (13)PWM1 (19)GPIO 26
GND
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
-+
オス-メスタイプ
オス-オスタイプ
(B)
GND
3.3V
330Ω+ -
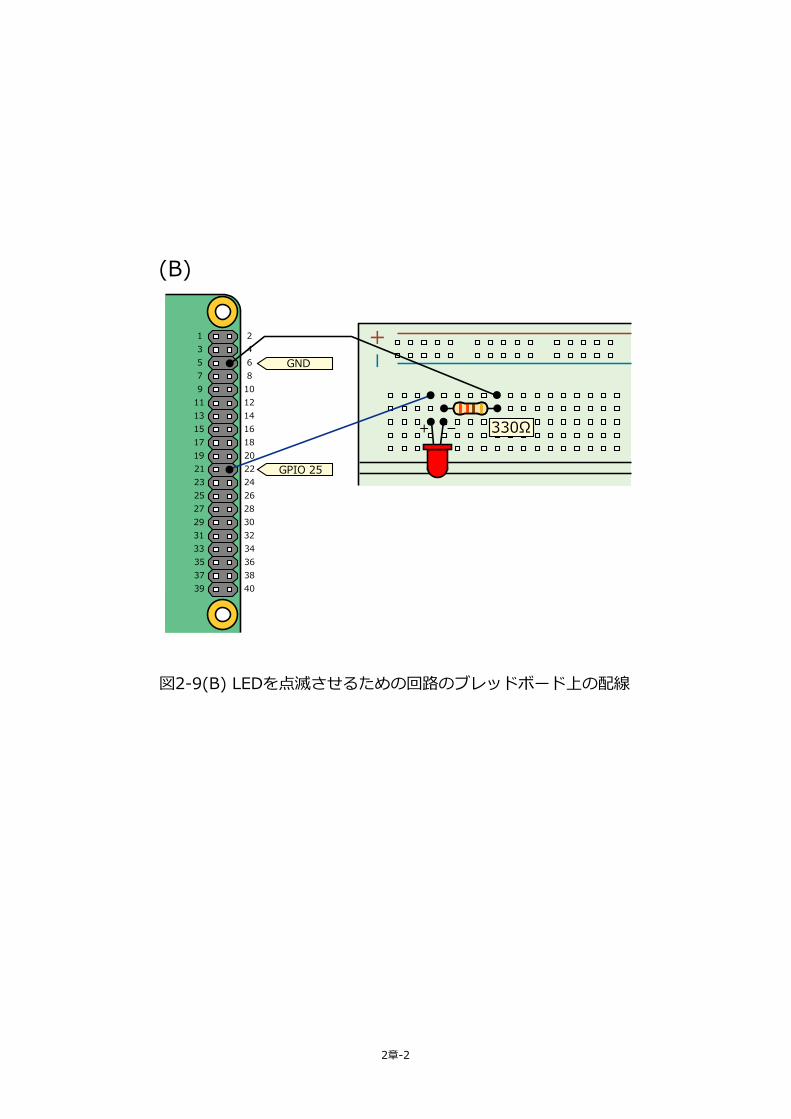
図2-9(B) LEDを点滅させるための回路のブレッドボード上の配線
2章-2
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
-+
330Ω
(B)
GPIO 25
GND
+ -
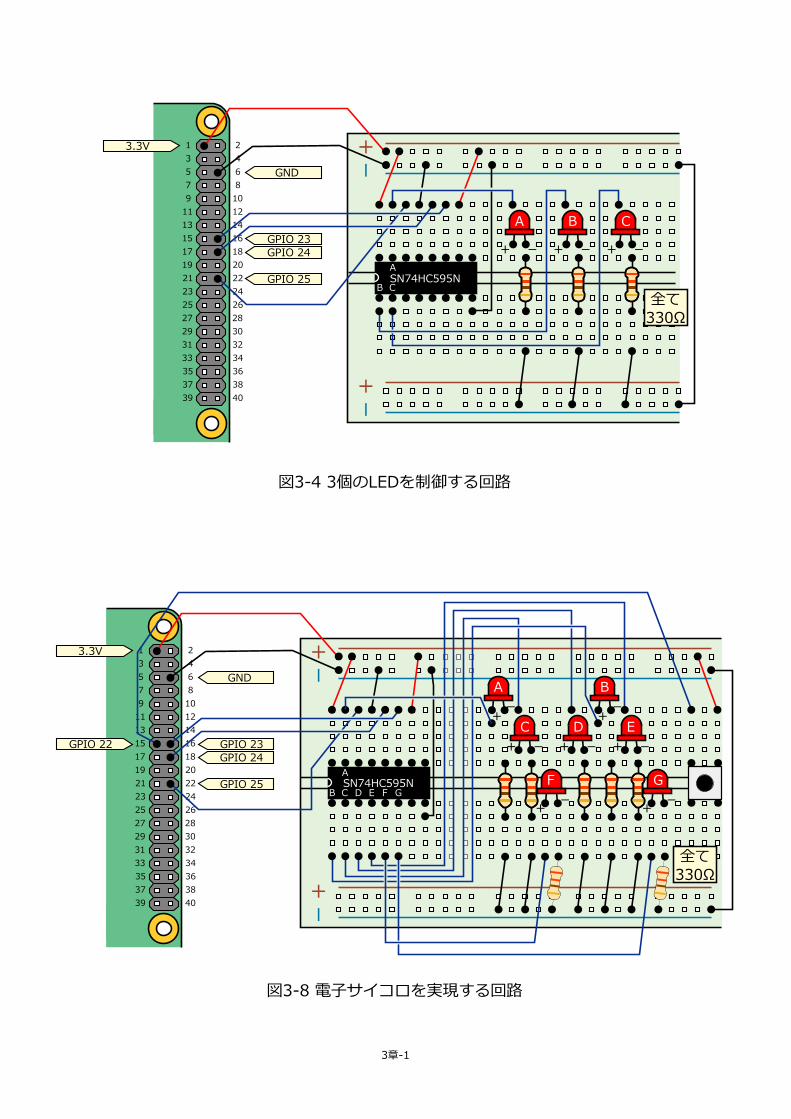
図3-8 電⼦サイコロを実現する回路
3章-1
図3-4 3個のLEDを制御する回路
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
SN74HC595N
-+
-+
全て330Ω
A
B C
GPIO 23GPIO 24
GPIO 25
GND
3.3V
+ -
A
+ -
B
+ -
C
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
SN74HC595N
-+
-+
A
B C D E F G
+ -
+-
+ -
+-
+ -
+ -
全て330Ω
+ -
GPIO 23GPIO 24
GPIO 25
GND
3.3V
GPIO 22
A B
C D E
F G
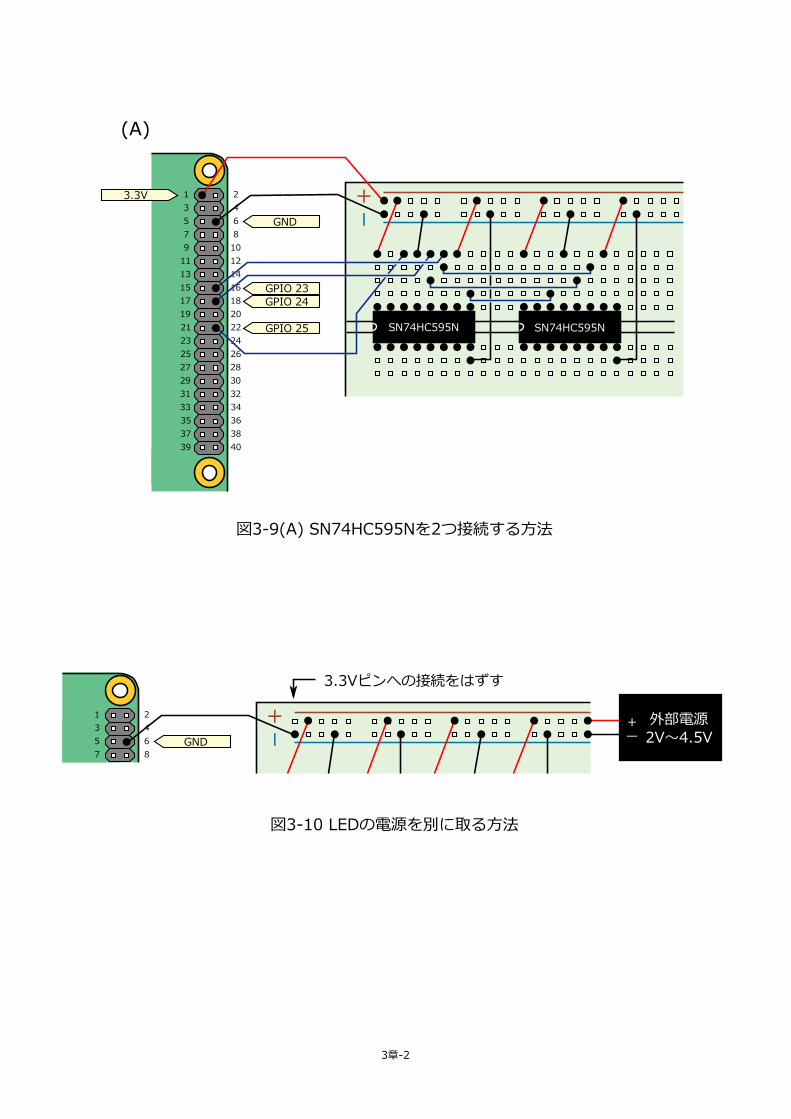
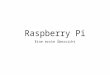
図3-10 LEDの電源を別に取る⽅法
3章-2
図3-9(A) SN74HC595Nを2つ接続する⽅法
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
SN74HC595N
-+
SN74HC595N
(A)
GPIO 23GPIO 24
GPIO 25
GND
3.3V
1357
2468
-+ +
ー外部電源2V〜4.5V
3.3Vピンへの接続をはずす
GND
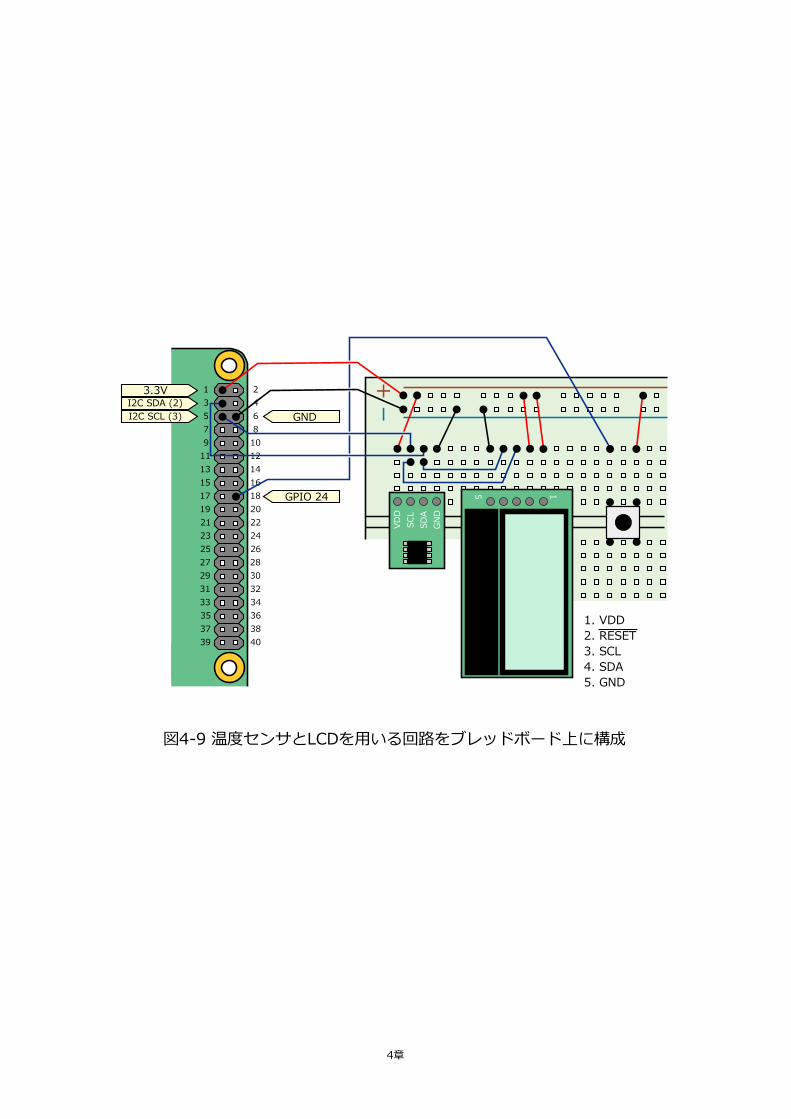
図4-9 温度センサとLCDを⽤いる回路をブレッドボード上に構成
4章
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
-+
1. VDD2. RESET3. SCL4. SDA5. GND
VDD
SCL
SDA
GND
15
I2C SDA (2)I2C SCL (3)
GPIO 24
GND
3.3V
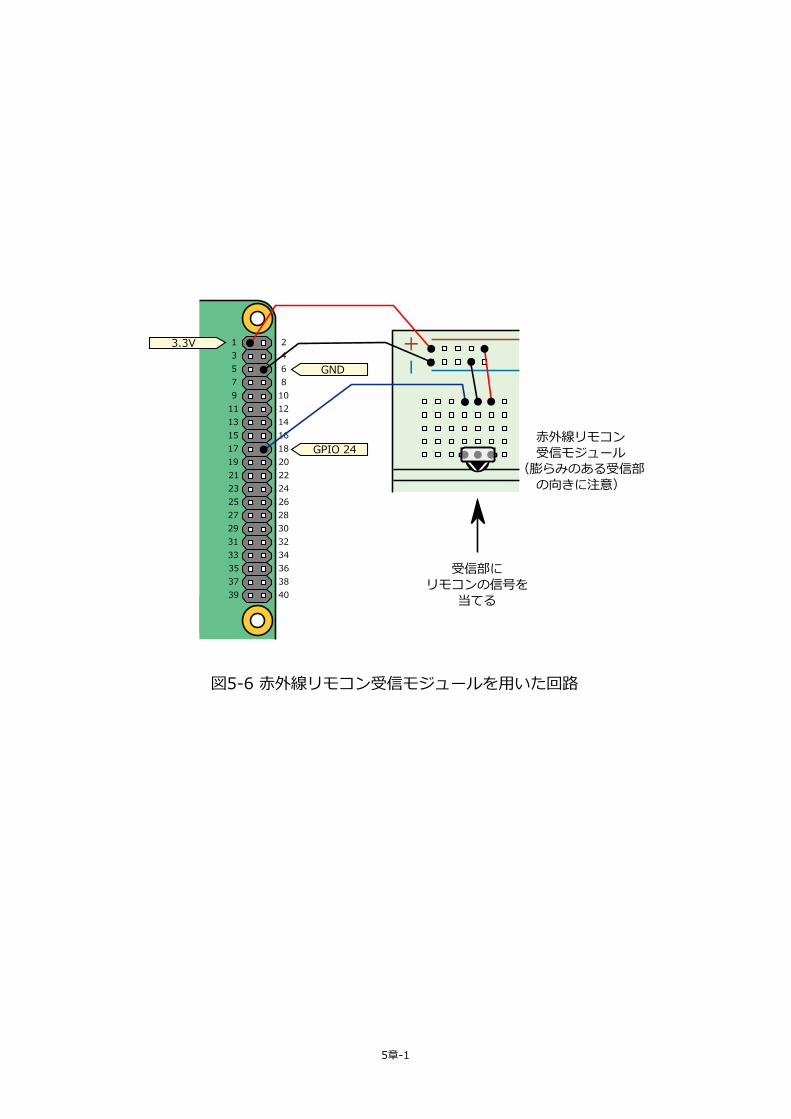
図5-6 ⾚外線リモコン受信モジュールを⽤いた回路
5章-1
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
受信部にリモコンの信号を
当てる
-+
⾚外線リモコン受信モジュール
(膨らみのある受信部の向きに注意)
GPIO 24
GND
3.3V
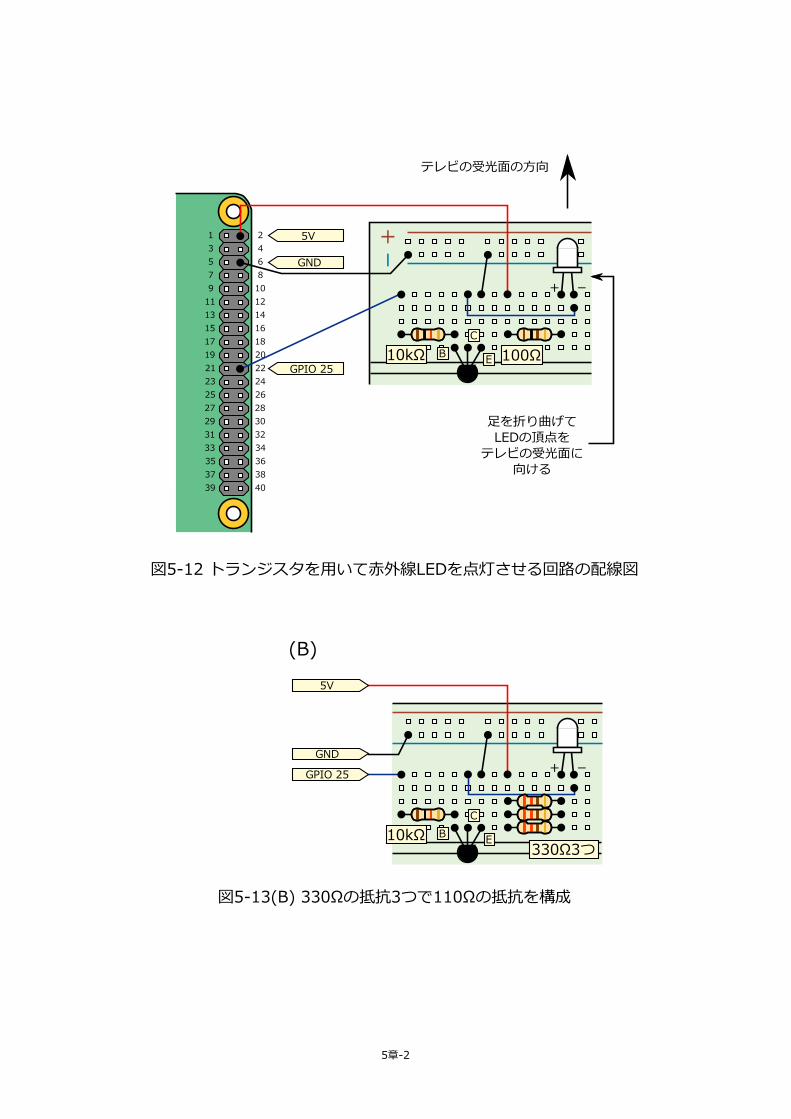
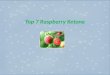
図5-13(B) 330Ωの抵抗3つで110Ωの抵抗を構成
5章-2
図5-12 トランジスタを⽤いて⾚外線LEDを点灯させる回路の配線図
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
-+
+ -
10kΩ 100ΩBC
E
⾜を折り曲げてLEDの頂点を
テレビの受光⾯に向ける
テレビの受光⾯の⽅向
5V
GPIO 25
GND
+ -
10kΩ330Ω3つ
BC
E
5V
GND
GPIO 25
(B)
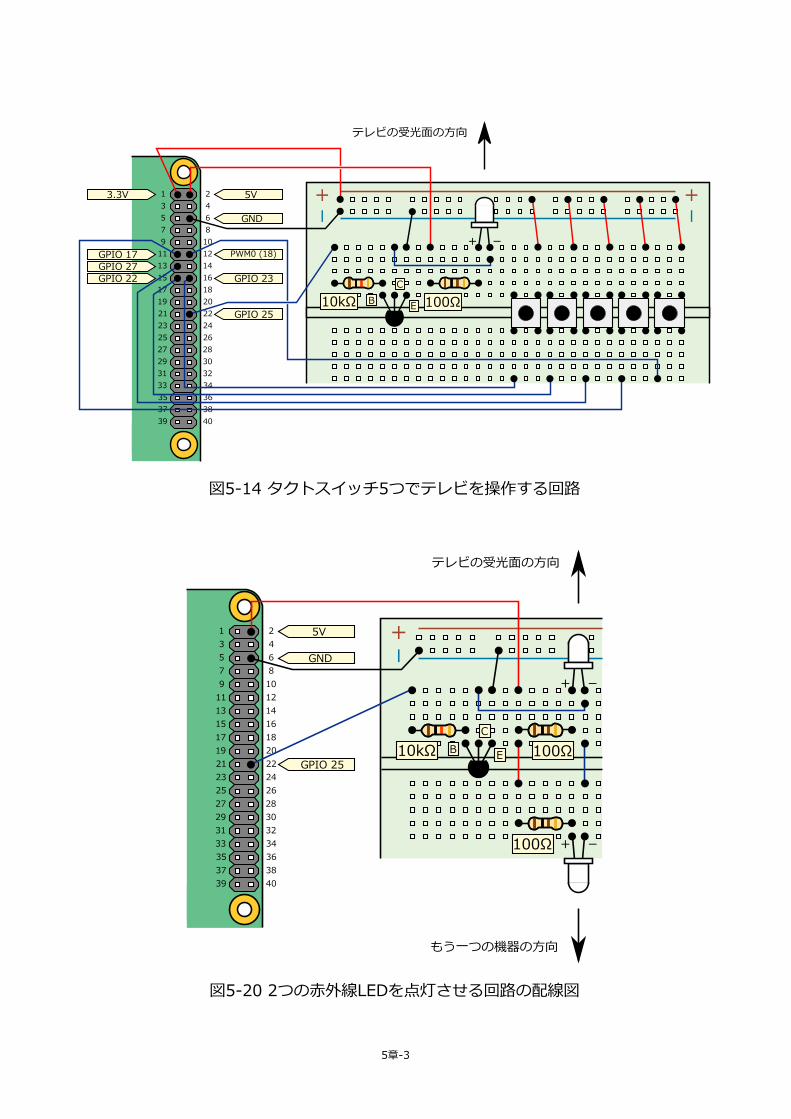
図5-20 2つの⾚外線LEDを点灯させる回路の配線図
5章-3
図5-14 タクトスイッチ5つでテレビを操作する回路
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
-+
-+
+ -
10kΩ 100ΩBC
E
テレビの受光⾯の⽅向
PWM0 (18)GPIO 17GPIO 27
GPIO 23
5V
GPIO 25
GND
3.3V
GPIO 22
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
-+
10kΩ 100ΩBC
E
テレビの受光⾯の⽅向
+ -
+ -100Ω
もう⼀つの機器の⽅向
5V
GPIO 25
GND
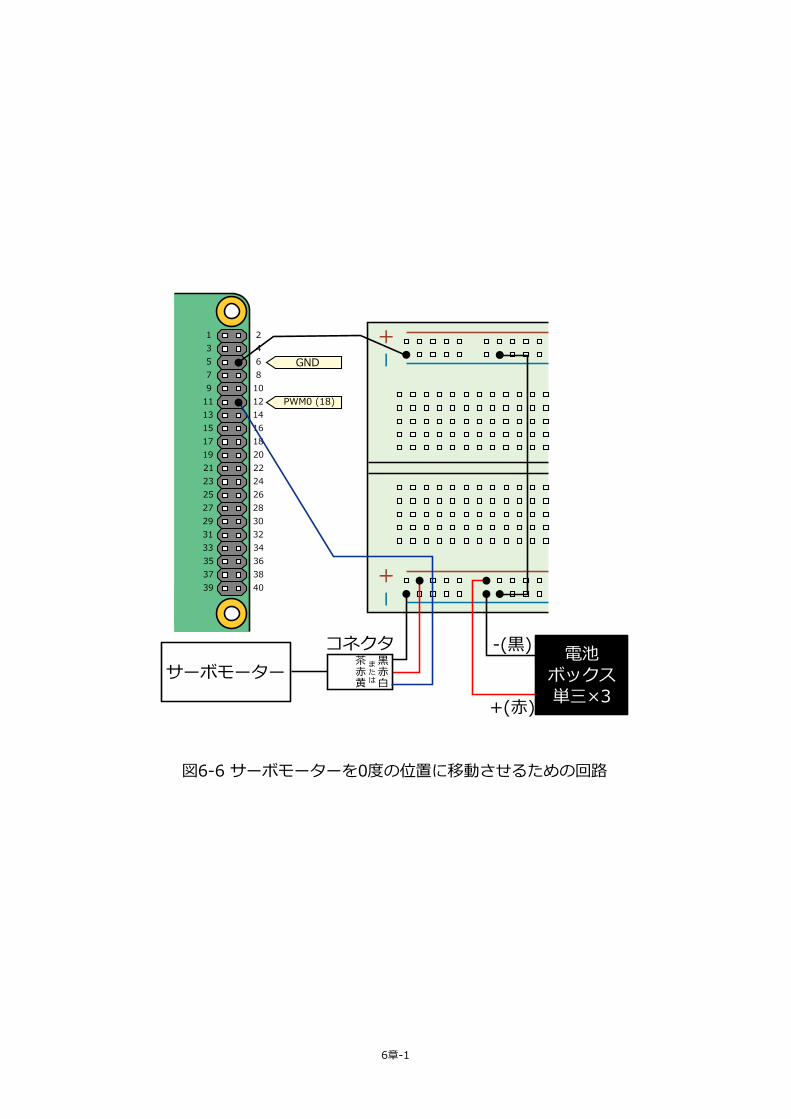
図6-6 サーボモーターを0度の位置に移動させるための回路
6章-1
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
-+
-+
サーボモーター
+(⾚)
-(⿊)コネクタ⾚⿊
⽩⾚茶
⻩たま
は
PWM0 (18)
GND
電池ボックス単三×3
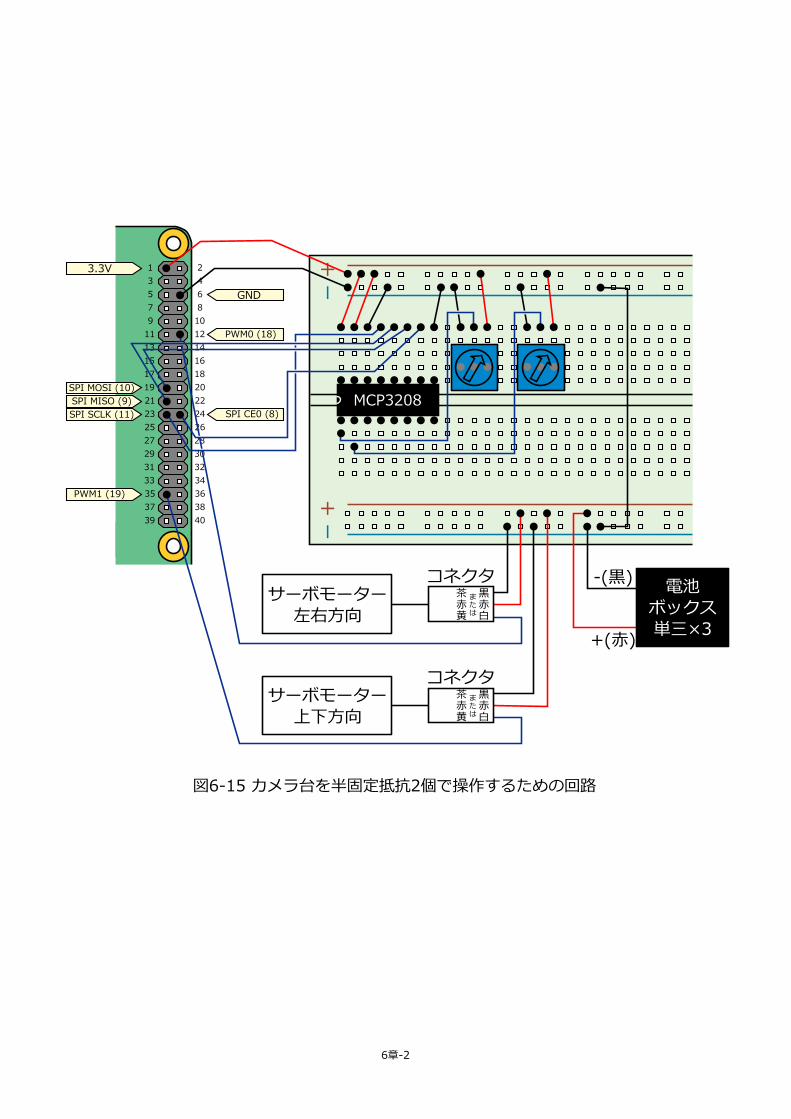
図6-15 カメラ台を半固定抵抗2個で操作するための回路
6章-2
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
-+
MCP3208
-+
電池ボックス単三×3+(⾚)
-(⿊)サーボモーター左右⽅向
コネクタ⾚⿊
⽩⾚茶
⻩たま
は
サーボモーター上下⽅向
コネクタ⾚⿊
⽩⾚茶
⻩たま
は
SPI CE0 (8)
PWM0 (18)
GND
3.3V
SPI MOSI (10)SPI MISO (9)SPI SCLK (11)
PWM1 (19)
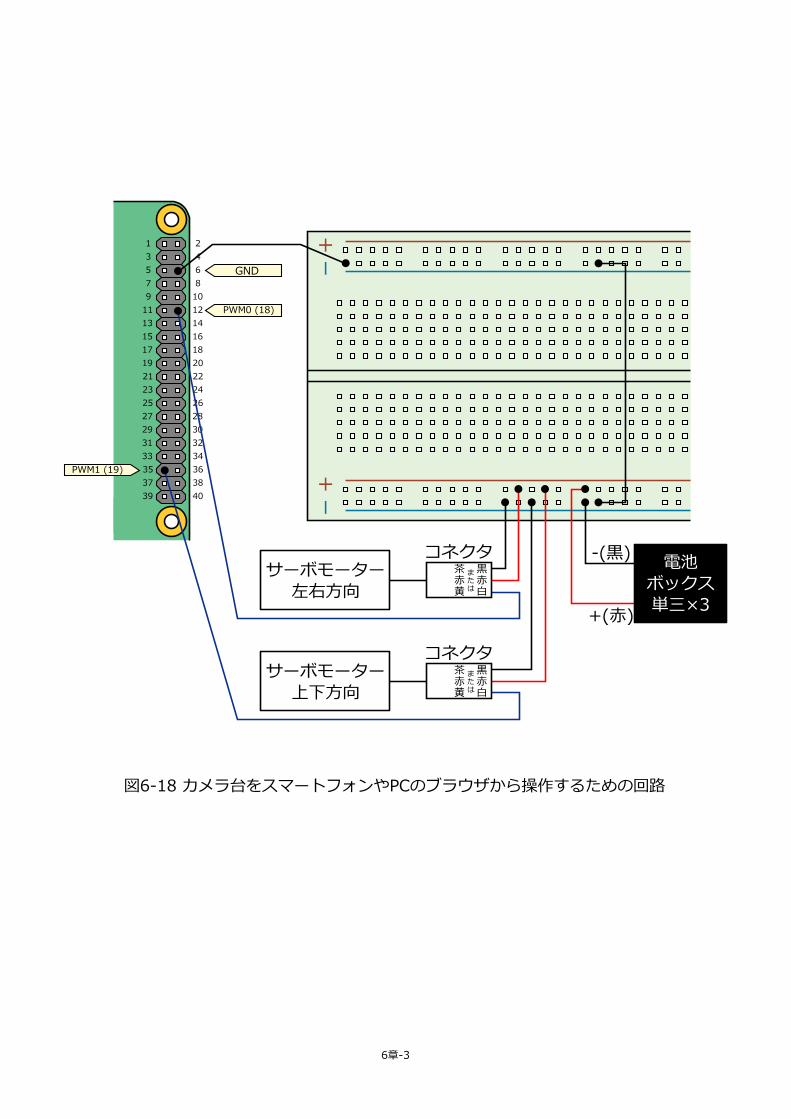
図6-18 カメラ台をスマートフォンやPCのブラウザから操作するための回路
6章-3
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
-+
-+
電池ボックス単三×3+(⾚)
-(⿊)サーボモーター左右⽅向
コネクタ⾚⿊
⽩⾚茶
⻩たま
は
サーボモーター上下⽅向
コネクタ⾚⿊
⽩⾚茶
⻩たま
は
PWM0 (18)
GND
PWM1 (19)
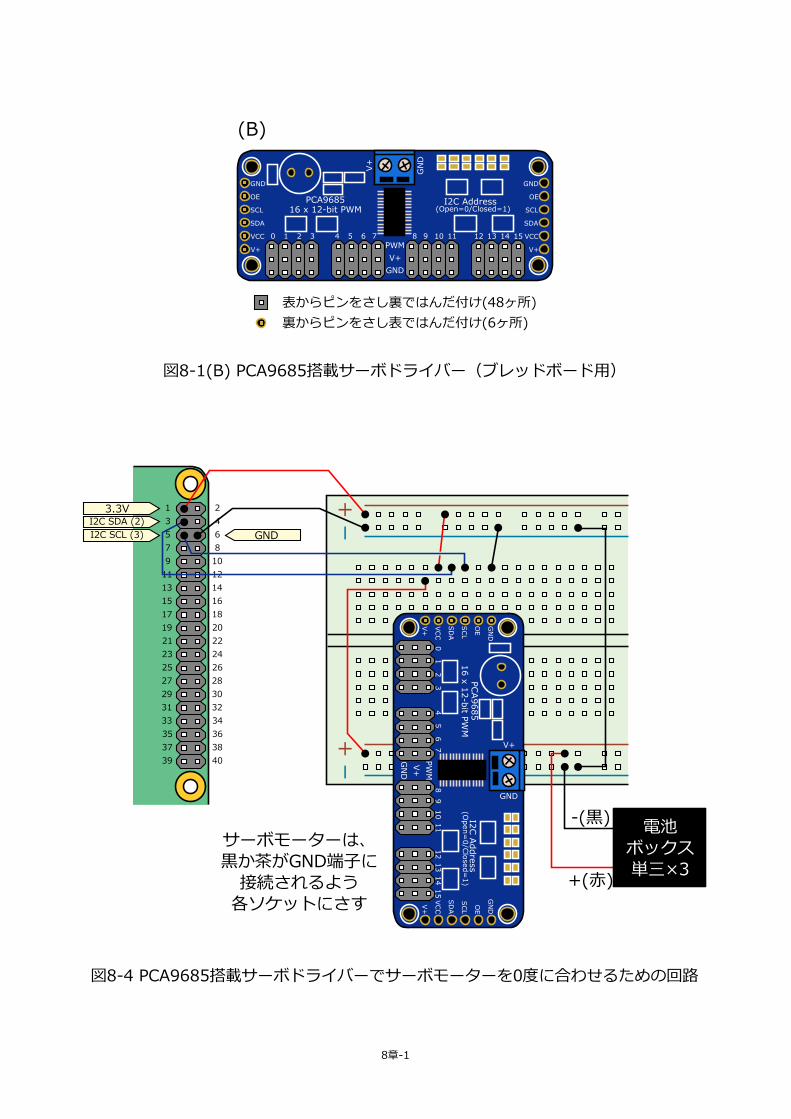
図8-4 PCA9685搭載サーボドライバーでサーボモーターを0度に合わせるための回路
8章-1
図8-1(B) PCA9685搭載サーボドライバー(ブレッドボード⽤)
表からピンをさし裏ではんだ付け(48ヶ所)裏からピンをさし表ではんだ付け(6ヶ所)
(B)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15PWM
V+
GND
PCA968516 x 12-bit PWM
I2C Address(Open=0/Closed=1)
GND
OE
SCL
SDA
VCC
V+
GND
OE
SCL
SDA
VCC
V+
V+
GN
D
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
-+
-+
電池ボックス単三×3+(⾚)
-(⿊)サーボモーターは、⿊か茶がGND端⼦に接続されるよう各ソケットにさす
I2C SDA (2)I2C SCL (3)
3.3V
GND
01
23
45
67
89
10
11
12
13
14
15
PWM
V+
GN
D
PCA9685
16 x 1
2-b
it PWM
I2C A
ddress
(Open
=0/C
losed=
1)
GN
D
OE
SCL
SD
A
VCC
V+
GN
D
OE
SCL
SD
A
VCC
V+
V+
GND
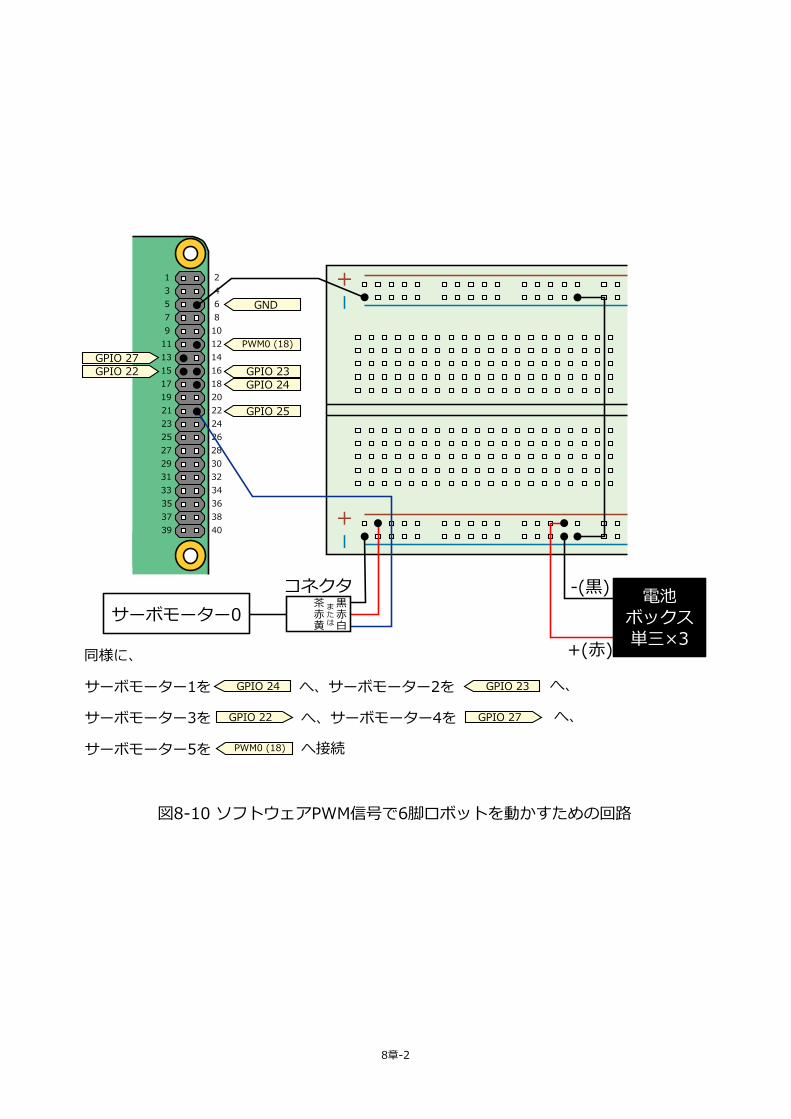
図8-10 ソフトウェアPWM信号で6脚ロボットを動かすための回路
8章-2
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
-+
-+
電池ボックス単三×3+(⾚)
-(⿊)サーボモーター0
コネクタ
同様に、
サーボモーター5を へ接続PWM0 (18)
GPIO 24 へ、サーボモーター2を GPIO 23 へ、サーボモーター1を
サーボモーター3を へ、サーボモーター4をGPIO 22 GPIO 27 へ、
⾚⿊
⽩⾚茶
⻩たま
は
GPIO 27GPIO 23
GPIO 25
GPIO 24GPIO 22
PWM0 (18)
GND
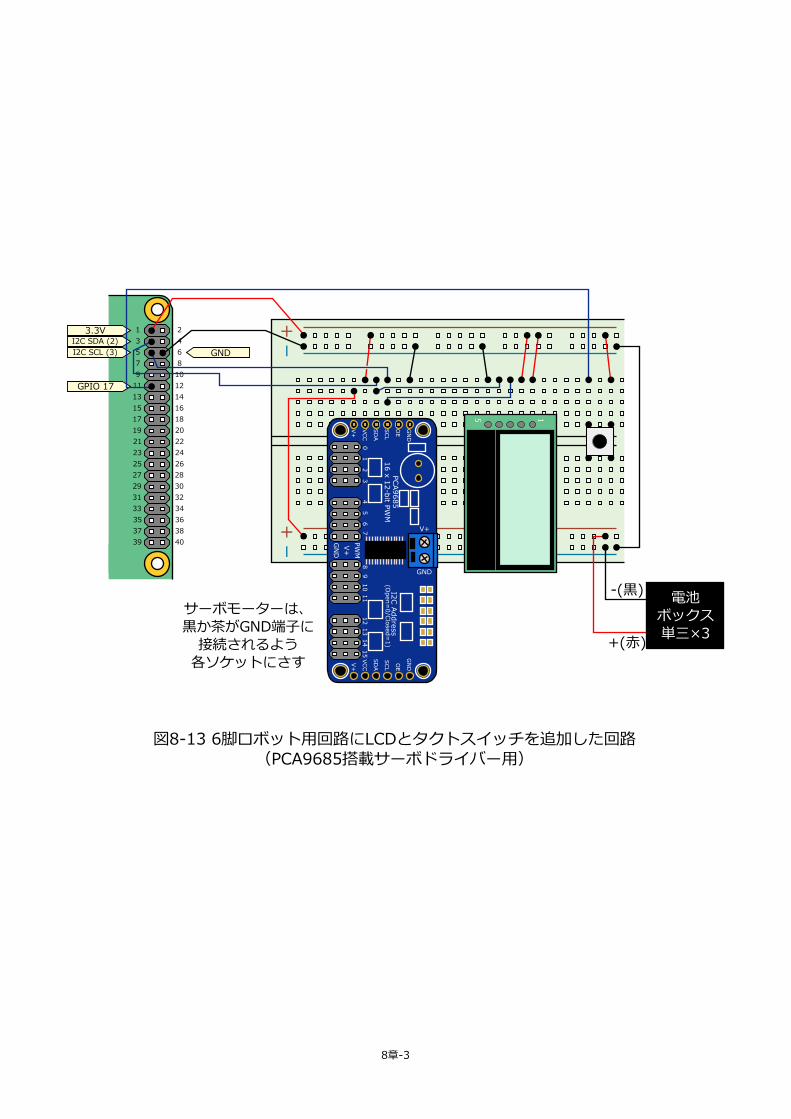
図8-13 6脚ロボット⽤回路にLCDとタクトスイッチを追加した回路(PCA9685搭載サーボドライバー⽤)
8章-3
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
GPIO 17
I2C SDA (2)I2C SCL (3)
3.3V
GND -+
-+
サーボモーターは、⿊か茶がGND端⼦に接続されるよう各ソケットにさす
電池ボックス単三×3+(⾚)
-(⿊)
01
23
45
67
89
10
11
12
13
14
15
PWM
V+
GN
D
PCA9685
16 x 1
2-b
it PWM
I2C A
ddress
(Open
=0/C
losed=
1)
GN
D
OE
SCL
SD
A
VCC
V+
GN
D
OE
SCL
SD
A
VCC
V+
V+
GND
15
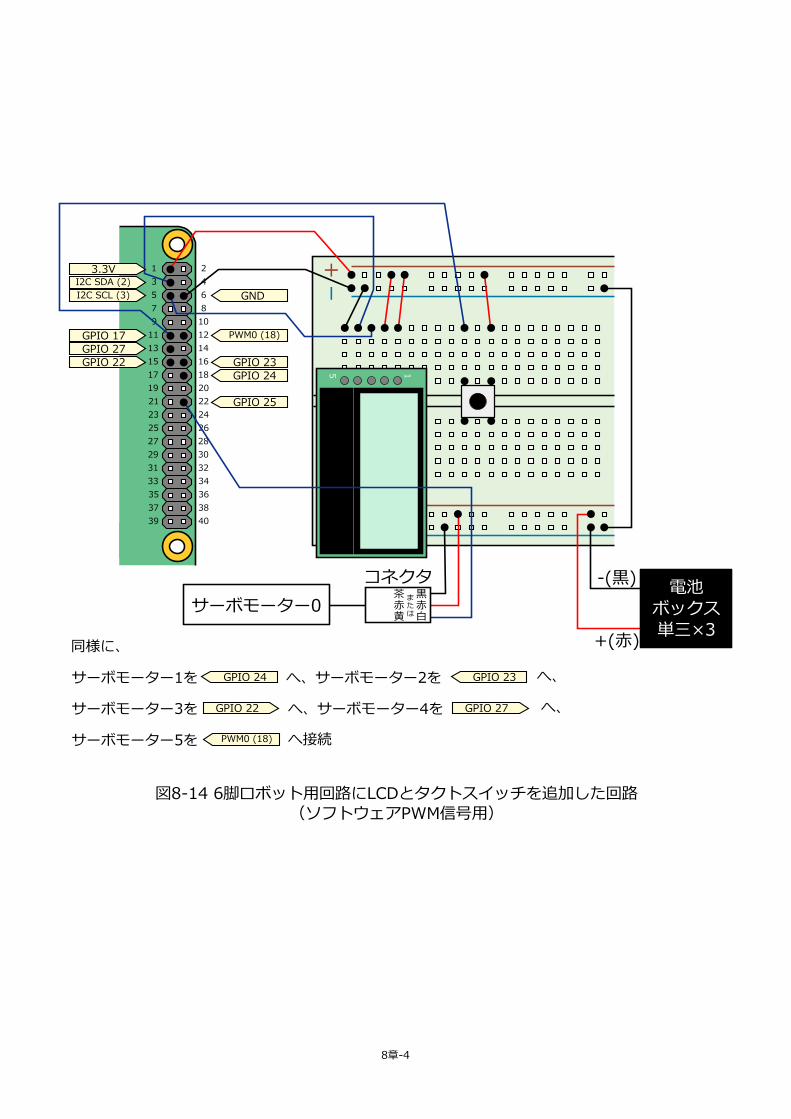
図8-14 6脚ロボット⽤回路にLCDとタクトスイッチを追加した回路(ソフトウェアPWM信号⽤)
8章-4
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
-+
-+
電池ボックス単三×3+(⾚)
-(⿊)
同様に、
サーボモーター5を へ接続PWM0 (18)
GPIO 24 へ、サーボモーター2を GPIO 23 へ、サーボモーター1を
サーボモーター3を へ、サーボモーター4をGPIO 22 GPIO 27 へ、
GPIO 27GPIO 23
GPIO 25
GPIO 24GPIO 22
PWM0 (18)GPIO 17
I2C SDA (2)I2C SCL (3)
3.3V
GND
15
サーボモーター0コネクタ
⾚⿊
⽩⾚茶
⻩たま
は
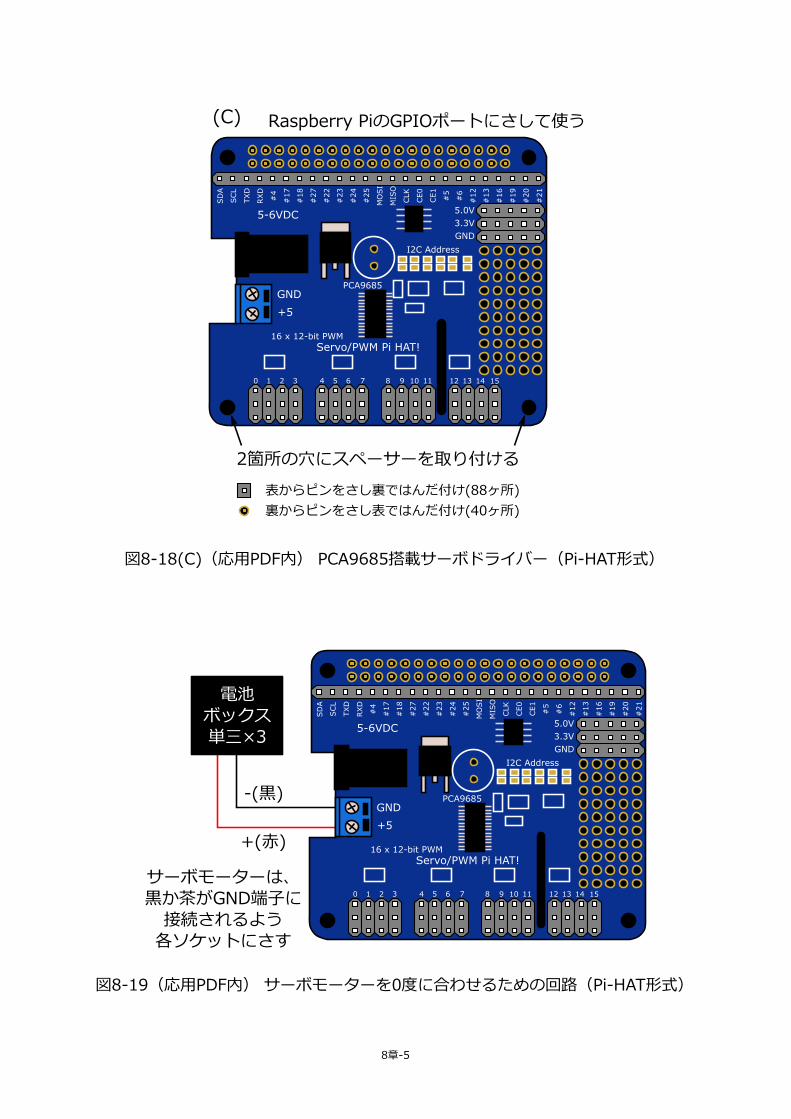
図8-19(応⽤PDF内) サーボモーターを0度に合わせるための回路(Pi-HAT形式)
8章-5
図8-18(C)(応⽤PDF内) PCA9685搭載サーボドライバー(Pi-HAT形式)
表からピンをさし裏ではんだ付け(88ヶ所)裏からピンをさし表ではんだ付け(40ヶ所)
(C) Raspberry PiのGPIOポートにさして使う
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
16 x 12-bit PWMServo/PWM Pi HAT!
GND
+5
PCA9685
I2C Address
5.0V3.3VGND
5-6VDCSD
A
SCL
TXD
RXD
#4
#17
#18
#27
#22
#23
#24
#25
MO
SI
MIS
O
CLK
CE0
CE1
#5
#12
#13
#16
#19
#20
#21
#6
2箇所の⽳にスペーサーを取り付ける
-(⿊)
+(⾚)
サーボモーターは、⿊か茶がGND端⼦に接続されるよう各ソケットにさす
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
16 x 12-bit PWMServo/PWM Pi HAT!
GND
+5
PCA9685
I2C Address
5.0V3.3VGND
5-6VDC
SD
A
SCL
TXD
RXD
#4
#17
#18
#27
#22
#23
#24
#25
MO
SI
MIS
O
CLK
CE0
CE1
#5
#12
#13
#16
#19
#20
#21
#6
電池ボックス単三×3
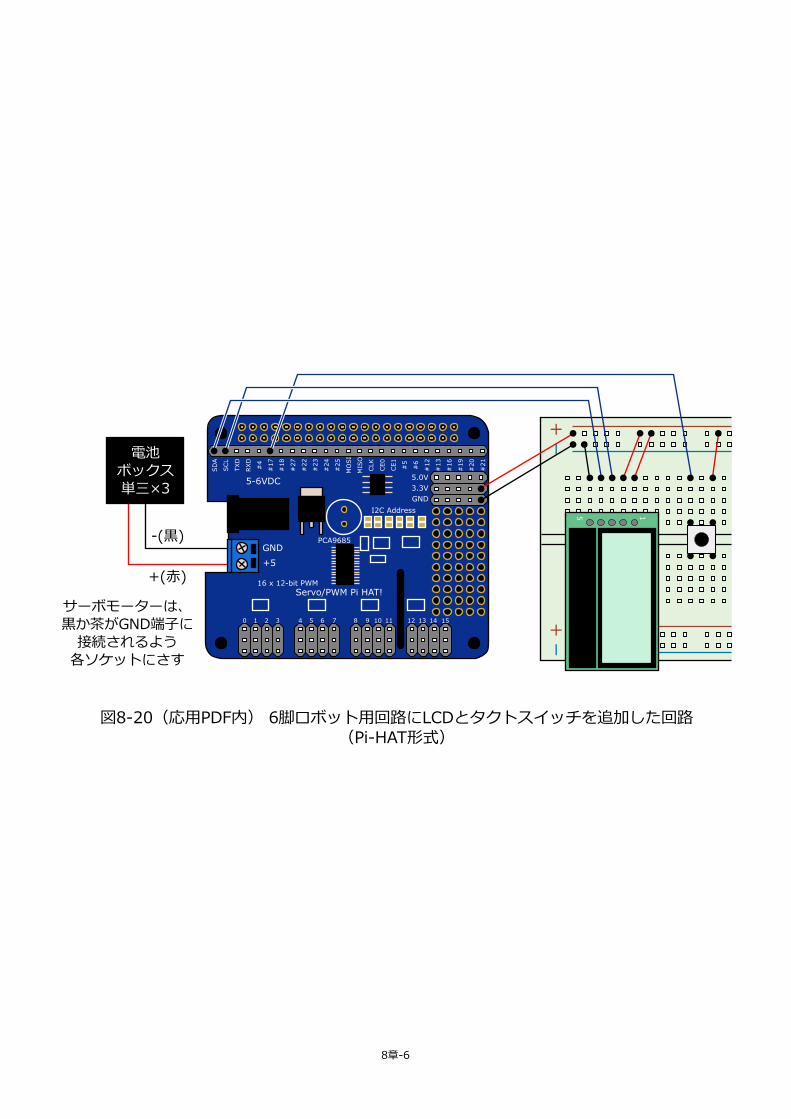
図8-20(応⽤PDF内) 6脚ロボット⽤回路にLCDとタクトスイッチを追加した回路(Pi-HAT形式)
8章-6
-(⿊)
+(⾚)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
16 x 12-bit PWMServo/PWM Pi HAT!
GND
+5
PCA9685
I2C Address
5.0V3.3VGND
5-6VDC
SD
A
SCL
TXD
RXD
#4
#17
#18
#27
#22
#23
#24
#25
MO
SI
MIS
O
CLK
CE0
CE1
#5
#12
#13
#16
#19
#20
#21
#6
-+
-+
サーボモーターは、⿊か茶がGND端⼦に接続されるよう各ソケットにさす
15
電池ボックス単三×3
8章-7
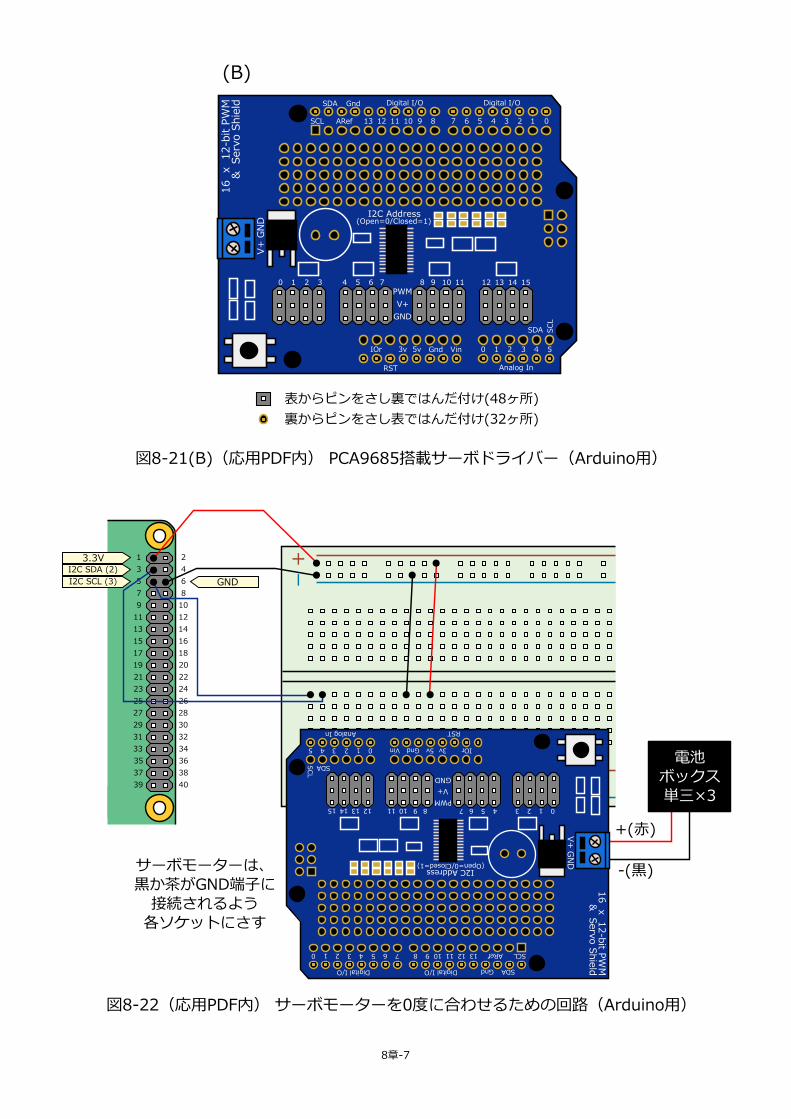
図8-22(応⽤PDF内) サーボモーターを0度に合わせるための回路(Arduino⽤)
図8-21(B)(応⽤PDF内) PCA9685搭載サーボドライバー(Arduino⽤)
表からピンをさし裏ではんだ付け(48ヶ所)裏からピンをさし表ではんだ付け(32ヶ所)
(B)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15PWM
V+
GND
I2C Address(Open=0/Closed=1)
16 x
12-
bit P
WM
& S
ervo
Shi
eld
V+GN
D
SDA Gnd Digital I/O Digital I/O
SCL ARef 7 6 5 4 3 2 1 013 12 11 10 9 8
SDA SCL
Analog InRST
0 1 2 3 4 5IOr 3v 5v Gnd Vin
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
-+
-+
サーボモーターは、⿊か茶がGND端⼦に接続されるよう各ソケットにさす
-(⿊)
+(⾚)
I2C SDA (2)I2C SCL (3)
3.3V
GND
0123456789101112131415PWM
V+
GND
I2C Address(Open=0/Closed=1)
16 x 12-bit PWM
& Servo Shield
V+GND
SDAGndDigital I/ODigital I/O
SCLARef76543210 1312111098
SDASCL
Analog In RST
012345 IOr3v5vGndVin
電池ボックス単三×3
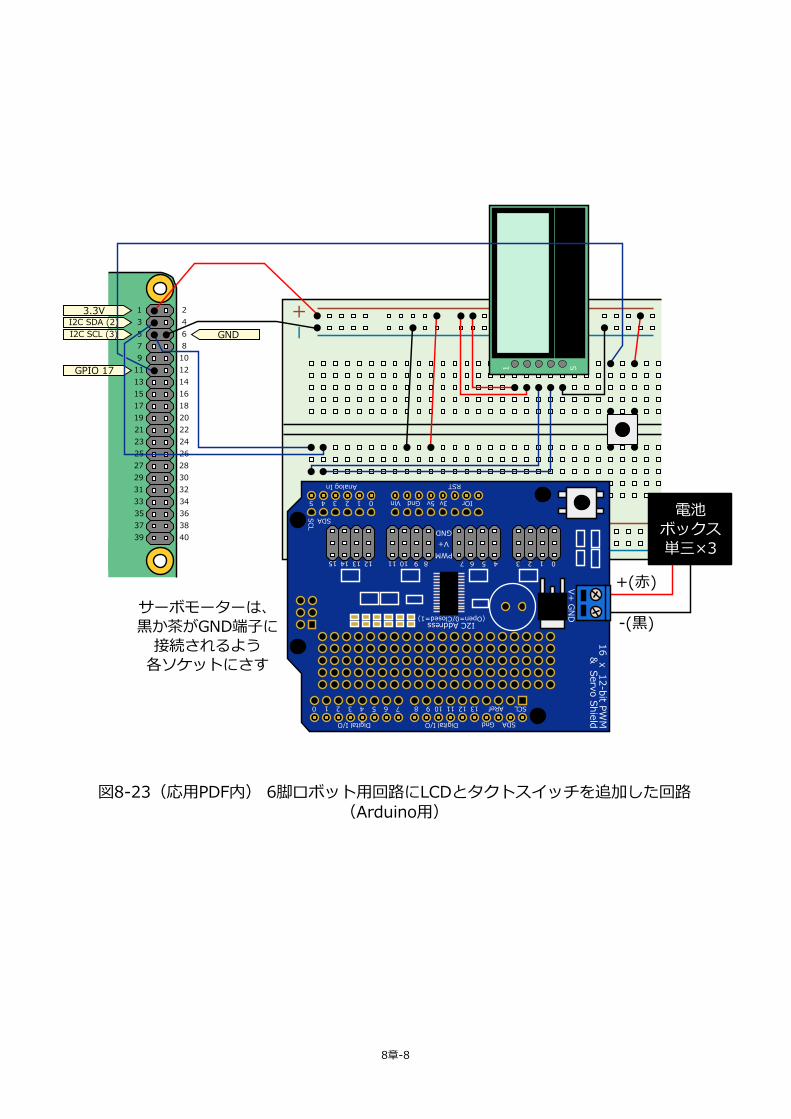
図8-23(応⽤PDF内) 6脚ロボット⽤回路にLCDとタクトスイッチを追加した回路(Arduino⽤)
8章-8
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
GPIO 17
I2C SDA (2)I2C SCL (3)
3.3V
GND -+
-+
サーボモーターは、⿊か茶がGND端⼦に接続されるよう各ソケットにさす
-(⿊)
+(⾚)
1 5
0123456789101112131415PWM
V+
GND
I2C Address(Open=0/Closed=1)
16 x 12-bit PWM
& Servo Shield
V+GND
SDAGndDigital I/ODigital I/O
SCLARef76543210 1312111098
SDASCL
Analog In RST
012345 IOr3v5vGndVin
電池ボックス単三×3
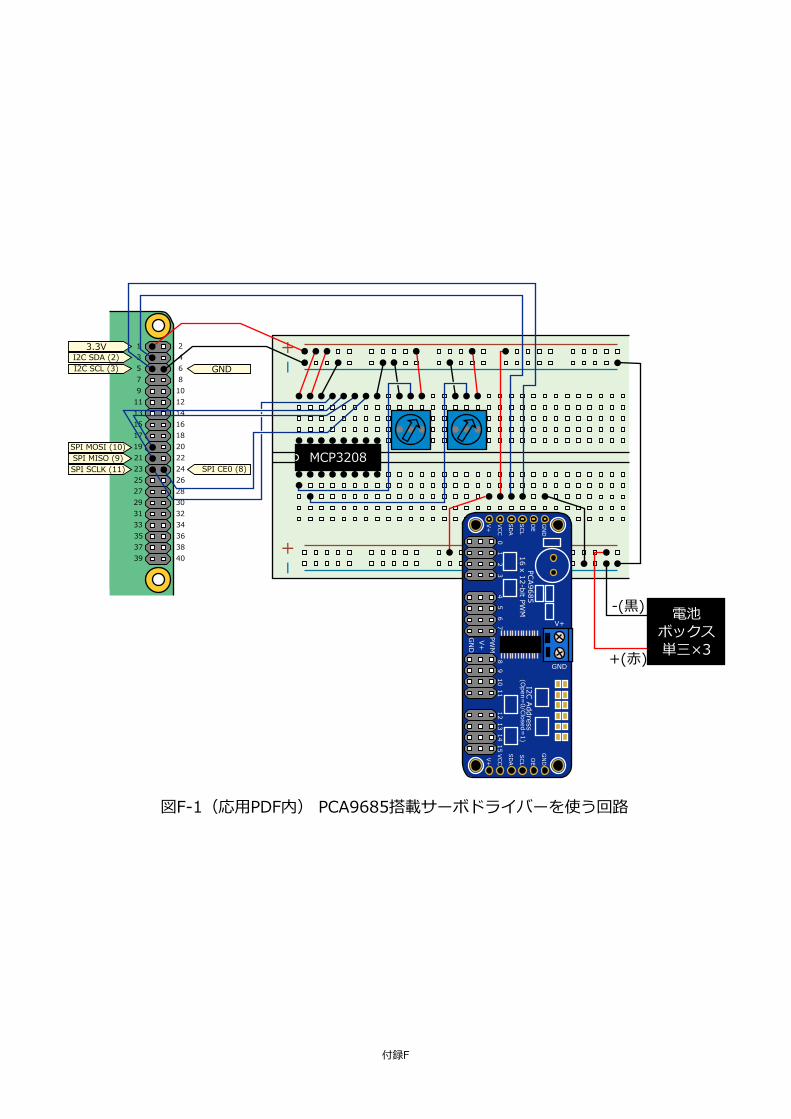
図F-1(応⽤PDF内) PCA9685搭載サーボドライバーを使う回路
付録F
13579
11
2468
1012
13151719212325
14161820222426
27293133353739
28303234363840
SPI CE0 (8)
SPI MOSI (10)SPI MISO (9)SPI SCLK (11)
I2C SDA (2)I2C SCL (3)
3.3V
GND -+
MCP3208
-+
電池ボックス単三×3+(⾚)
-(⿊)
01
23
45
67
89
10
11
12
13
14
15
PWM
V+
GN
D
PCA9685
16 x 1
2-b
it PWM
I2C A
ddress
(Open
=0/C
losed=
1)
GN
D
OE
SCL
SD
A
VCC
V+
GN
D
OE
SCL
SD
A
VCC
V+
V+
GND