Embed Size (px)
Citation preview

On Solving General Two-Stage Stochastic Programs
Manish Bansal and Sanjay MehrotraDepartment of Industrial Engineering and Management Sciences, Northwestern University
Emails: manish.bansal; [email protected]
October 15, 2015
Abstract. We study general two-stage stochastic programs and present conditions under whichthe second stage programs can be convexified. This allows us to relax the restrictions, such asintegrality, binary, semi-continuity, and many others, on the second stage variables in certain situa-tions. Next, we introduce two-stage stochastic disjunctive programs (TSS-DPs) and extend Balas’slinear programming equivalent for deterministic disjunctive programs to TSS-DPs. In addition,we develop a finitely convergent algorithm, which utilizes the sequential convexification approachof Balas within L-shaped method, to solve various classes of TSS-DPs. We formulate a semi-continuous program (SCP) as a DP and use our results for TSS-DPs to solve two-stage stochasticSCPs (TSS-SCPs). In particular, we provide linear programming equivalent for the second stage ofthe TSS-SCPs and showcase how our convexification approach can be utilized to solve a TSS-SCPhaving semi-continuous inflow set in the second stage.
1. Introduction
In this paper, we consider the following general two-stage stochastic program (TSSP):
min cTx+ Eω[Q(ω, x)]
s.t. Ax ≥ bx ∈ X ,
(1)
where ω is a random vector with finite support Ω and for any scenario ω of Ω,
Q(ω, x) := min g(ω)T y(ω) (2)
s.t. W (ω)y(ω) ≥ r(ω)− T (ω)x (3)
y(ω) ∈ Y(ω, x). (4)
Here, c ∈ Rp, A ∈ Rm1×p, b ∈ Rm1 , and for each ω ∈ Ω, g(ω) ∈ Rq, recourse matrix W (ω) ∈Rm2×q, technology matrix T (ω) ∈ Rm2×p, and r(ω) ∈ Rm2 . Let Π(x, y) := cTx+
∑ω∈Ω g(ω)T y(ω).
The formulation defined by (2)-(4) and the function Q(ω, x) are referred to as the second-stagesubproblem and recourse function, respectively. We assume that
(i) T (ω) ∈ Zm2×p,
(ii) X := x : Ax ≥ b, x ∈ X is non-empty,
(iii) K(ω, x) := y(ω) : (3)-(4) hold is non-empty for all (ω, x) ∈ Ω×X,
(iv) Q(ω, x) <∞ for all (ω, x) ∈ Ω×X (relatively complete recourse).
We consider general sets X ⊆ Rp and Y(ω, x) ⊆ Rq, thereby subsuming restrictions such as inte-grality, semi-continuity, binary, etc. on the variables. In this paper, we provide conditions under
1

which these restrictions on the second stage non-continuous variables of TSSPs (1) can be relaxed.This means that we can obtain linear programming equivalent for the second stage programs ofthe TSSP in certain conditions. Readers are referred to [14] for general introduction on stochas-tic programming. Note that the TSSPs with X := Zp1 × Rp−p1 and Y(ω, x) := Zq1 × Rq−q1 arereferred to as the two-stage stochastic mixed integer programs (TSS-MIPs). In the literature onTSS-MIPs, algorithms have been developed for TSS-MIPs with second stage having pure integervariables [1, 25, 31, 40], or binary and continuous variables [15, 21, 26, 28, 29, 33, 37], or mixedinteger variables [33, 34, 38]. For survey on TSS-MIPs, we refer the reader to [27, 30, 32].
One of the major challenges in solving the general TSSPs is to optimize NP-hard second-stageproblems for a given first stage decision and a particular realization (scenario) of uncertain param-eters. Therefore, it is important to evaluate the conditions under which the second stage programscan be convexified. This will allow us to relax the restrictions, if any, on the second stage non-continuous variables and obtain linear programming equivalent for the second stage program. Inthis direction, Bansal et al. [9] provide conditions under which the second stage formulation of gen-eral two-stage MIPs in Benders’ form or TSS-MIPs with |Ω| = 1 (single scenario) can be convexified.They also present conditions under which the convexificaton of the second stage of a TSS-MIP canbe used to relax integrality constraints of the corresponding second stage integer variables in theextensive formulation of the problem. Bansal et al. [9] extends the research of Kim and Mehrotra[24] in which they consider an integrated staffing and scheduling problem (ISSP) under demanduncertainty as a TSS-MIP with pure integer variables in the first stage and convexify the secondstage mixed integer program by adding (a priori) parametric mixed integer rounding inequalities.Both Kim and Mehrotra [24] and Bansal et al. [9] show that the convexification approach is com-putationally very effective in solving the ISSP and four variants of two-stage capacitated lot-sizingproblem, respectively, which are intractable otherwise. In this paper, we further generalize theresults of Bansal et al. [9] for a general two-stage mathematical optimization program (in Bender’sform) and TSSPs. More specifically, we show that under suitable conditions, the general secondstage programs can be convexified, thereby obtaining linear programming equivalent for the secondstage programs.
We also introduce two-stage stochastic disjunctive program (TSS-DP) with disjunctive con-straints in both first and the second stage of TSSP. It is important to note that the class of TSS-DPssubsumes TSS-MIPs, two-stage stochastic semi-continuous programs (TSS-SCPs), and many classesof TSSPs where the first (or/and second) stage is a non-convex program (such as general quadraticprograms, separable non-linear programs, etc.). As per our knowledge, the general TSS-DP has notbeen studied before. Disjunctive programming (DP) is a well-known area in the field of optimizationwhere a linear programming problem has disjunctive constraints, i.e. linear constraints with the“or” (∨, disjunctive) operations. More specifically, DP is optimization over a union R of polyhedraRi = z ∈ Rn : Eiz ≥ f i, denoted by R := ∪iRi = z ∈ Rn : ∨i(Eiz ≥ f i). Refer to Chapter 10of [23] and see Section 3 for details. Balas [3, 4] provides a tight extended formulation for R andthe convex hull description of R in the original space. In this paper, we amalgamate these resultswith our convexification approach for TSSPs and provide conditions to get a linear programmingequivalent for the second stage of TSS-DPs, i.e TSSPs with X := x ∈ Rp : ∨s∈S(Dsx ≥ ds) andY(ω, x) := y(ω) ∈ Rq : ∨h∈H
(Dh
1 (ω)y(ω) ≥ dh0(ω)−Dh2 (ω)x
) for all (ω, x) ∈ (Ω, X). Similar to
the Benders’ decomposition [13] and L-shaped method [39], we present a decomposition algorithmutilizing our convexification approach to solve TSS-DPs.
Balas [3, 4] exhibits a property according to which the convex hull of a set of points satisfyingmultiple disjunctive constraints, where each disjunction contains exactly one inequality, can be de-
2

rived by sequentially generating the convex hull of points satisfying only one disjunctive constraint.This property is referred to as the sequential convexification; see Section 3 for details. A subclass ofDPs for which the sequential convexification property holds is called sequentially convexifiable DPs.In [3, 4], Balas shows that the so-called facial DPs are sequentially convexifiable. Interestingly, allpure binary and mixed 0-1 programming problems are facial DPs, while general mixed (or pure)integer programs are not [4, 5, 6]. Later, Balas et al. [7] extend the sequential convexificationproperty for a general non-convex set with multiple constraints. They provide the necessary andsufficient conditions under which reverse convex programs (DPs with infinitely many terms) aresequentially convexifiable and present classes of problems, in addition to facial DPs, which alwayssatisfy the sequential convexification property. In this paper, we present a decomposition algorithmakin to the Benders’ decomposition [13] and L-shaped method [39] to solve TSS-DPs with sequen-tially convexifiable DPs in the second stage. We harness the benefits of sequential convexificationproperty for this algorithm and present conditions under which it is finitely convergent. These re-sults generalize the results developed in [37, 38] for TSSPs with mixed 0-1 programs in the secondstage, utilizing the reformulation-linearization technique (RLT) of Sherali and Adams [35, 36] andlift-and-project cuts of Balas et al. [5].
Furthermore, we write a DP equivalent of a semi-continuous program (SCP) which is a linearprogram with semi-continuity restrictions on some continuous variables, i.e. a variable belongsto a set of the form [0, l] ∪ [l, u] where 0 ≤ l ≤ l ≤ u. Note that by setting l = l, the semi-continuous variable becomes continuous and by setting l = 0 and l = u = 1, the semi-continuousvariable becomes binary. Therefore, mixed 0-1 programs are special cases of SCPs. In this paper,we study two-stage stochastic semi-continuous programs (TSS-SCPs), a special case of TSS-DPs.More specifically, we present a linear programming equivalent for the second stage of the TSS-SCPand showcase how our convexification approach for TSSPs can be utilized to solve a TSS-SCPhaving semi-continuous inflow set (studied by Angulo et al. [2]) in the second stage.
Organization of this paper: In Section 2, we provide conditions under which the second stageprograms of general two-stage mathematical optimization programs (MOPs) in Benders’ form (orTSSPs with |Ω| = 1) and TSSPs in general can be linearized, thereby relaxing the restrictions,if any, on the corresponding second stage variables in these problems. After briefly reviewing theresults developed in [3, 4, 5] for the disjunctive programming problems in Section 3, we introduceTSS-DPs in Section 4, extend linear programming equivalent for DPs [3, 4] to TSS-DPs, and providea decomposition algorithm to solve general TSS-DPs using our convexification approach. We alsopresent another decomposition algorithm, which utilizes the sequential convexification approachwithin L-shaped method, to solve TSS-DPs with facial DPs in the second stage in finite iterationsand TSS-DPs with sequentially convexifiable programs in the second stage. In Section 5, we studyTSS-SCPs and showcase how our convexification approach (discussed in Section 2) can be utilizedto solve TSS-SCPs, in particular a relaxation of two-stage stochastic semi-continuous network flowproblem. In addition, present a linear programming equivalent for the second stage of TSS-SCPsby formulating TSS-SCP as a TSS-DP. Finally, we provide concluding remarks in Section 6.
2. Convexifying second stage programs
In this section, we present conditions sufficient to convexify the second stage programs of generaltwo-stage mathematical optimization programs (MOPs) in Benders’ form (or TSSPs with |Ω| = 1)and TSSPs in general, thereby relaxing the restrictions, if any, on the corresponding second stage
3

variables in these problems. Later in this paper, we demonstrate the significance of these results insolving TSSPs with disjunctive constraints or semi-continuous variables in the second stage, andTSSP with semi-continuous inflow set in the second stage.
2.1 Sufficient conditions to convexify second stage of MOPs in Benders’ form
We consider the following two-stage MOP in Benders’ form which is same as the TSSPs with |Ω| = 1(single scenario):
mincTx+ gT y : x ∈ X, y ∈ K(x) (5)
where K(x) = y ∈ Y(x) : Wy ≥ r − Tx, for x ∈ X, is the feasible region of the second stagesubproblem. We denote the feasible region of the extensive formulation for (5) by P := (x, y) ∈X × Y(x) : Tx + Wy ≥ r. Also, let Phull be a formulation such that conv(Phull) = conv(P)and Π(x, y) = cTx + gT y. In the next theorem, we provide conditions sufficient to relax Y(x) informulation (5) and P to Rq. Bansal et al. (Theorem 4) [9] provide an alternate proof for Theorem1 stated for two-stage MIP in Benders’ form, a special case of (5) where X = Zp1 × Rp−p1 andY(x) = Zq × Rq−q1 for all x ∈ X.
Theorem 1. Define
Ktight(x) := (y, u) ∈ Rq × Rq2 :
Wy ≥ r − Tx,N2y +N3u ≥ d−N1x,
where N1, N2, N3, and d are matrices (or vectors) of appropriate sizes. If conv(K(x)) = Projy(Ktight(x))for all x ∈ X, then
Ptight := (x, y, u) ∈ X × Rq × Rq2 :
Tx+Wy ≥ r,N1x+N2y +N3u ≥ d,
is a tight extended formulation of P, i.e. Phull = Projx,y(Ptight).
Proof. Let (x∗, y∗), (x, y, u), and y be the optimal solutions of minΠ(x, y) : (x, y) ∈ P, minΠ(x, y) :(x, y, u) ∈ Ptight, and minΠ(x, y) : y ∈ K(x), respectively. Since K(x∗) = Projx=x∗,y(P), y∗ ∈K(x∗). Now, for all x ∈ X, if conv(K(x)) = Projy(Ktight(x)), then there exists a vector u∗ ∈ Rq2such that (y∗, u∗) ∈ Ktight(x∗). Hence, (x∗, y∗, u∗) ∈ Ptight as Ktight(x∗) = Projx=x∗,y(Ptight),implying that Ptight is an extended formulation of P, i.e., Phull ⊆ Projx,y(Ptight) or Π(x, y) ≤Π(x∗, y∗). Also, since (x, y) ∈ P, Π(x∗, y∗) ≤ Π(x, y) because (x∗, y∗) is the optimal solution.Therefore, for each c ∈ Rp and g ∈ Rq, we have
Π(x, y) ≤ Π(x∗, y∗) ≤ Π(x, y). (6)
Notice that since Ktight(x) = Projx=x,y(Ptight), (y, u) ∈ Ktight(x) or y ∈ conv(K(x)). Let y =∑i λiy
i such that∑
i λi = 1, λi ≥ 0, and yi ∈ K(x), i.e. yi are the vertices of conv(K(x)).This implies that gT y =
∑i λi(g
T yi) which means either gT y = (gT yi) for all i such that λi > 0or gT y > (gT yi) for some i with λi > 0. The latter case is not possible because it contradicts
4

the optimality of (x, y). Furthermore, gT y ≤ gT yi for all i because of optimality, and henceΠ(x, y) ≤ Π(x, y). Using inequalities (6), we get Π(x, y) = Π(x∗, y∗) = Π(x, y) for each c ∈ Rp andg ∈ Rq, which implies that Phull = Projx,y(Ptight). This completes the proof.
Theorem 2. If Phull = Projx,y(Ptight) then conv(K(x)) ⊆ Projy(Ktight(x)) for all x ∈ X andconv(K(x)) = Projy(Ktight(x)) for all x ∈ ver(X) where ver(X) is the set of vertices of conv(X).
Proof. We assume that Phull = Projx,y(Ptight). First, let y ∈ K(x) for x ∈ X. Since K(x) =Projx=x,y(P), (x, y) ∈ P and because of our assumption, there exist u ∈ Rq2 such that (x, y, u) ∈Projx,y(Ptight). Hence, (y, u) ∈ Ktight(x) because Ktight(x) = Projx=x,y(Ptight). This implies thatfor all x ∈ X, conv(K(x)) ⊆ Projy(Ktight(x)). Next, we know that conv(K(x)) = y : (x, y) ∈ Phulland Ktight(x) = (y, u) : (x, y, u) ∈ Ptight for x ∈ X. However, for x ∈ ver(X) where ver(X) isthe set of vertices of conv(X), x = x defines a face of conv(P). Therefore, each extreme point ofPhull ∩ x = x have y ∈ Y(x), and hence conv(K(x)) = Projy(Ktight(x)) for x ∈ ver(X). Thiscompletes the proof.
Bansal et al. [9] provide two examples of MOP in Benders’ form, where X := Zp and X := Rp,for which the second stage mixed integer programs can and cannot, respectively, be convexified byadding a priori parametric cuts. These cuts are obtained from the convexification for the extensiveformulation. Next, we use the below presented example of two-stage MOP in Benders’ form withpure integer program in the first stage, i.e. X := Zp, and mixed integer programs in the secondstage, i.e. Y(x) := Zq1 × Rq−q1 , to show that in general, if Phull = Projx,y(Ptight) then it is notnecessary that conv(K(x)) = Projy(Ktight(x)) for each x ∈ X. In other words, for some cases itis possible that there exists an x ∈ X := x ∈ Zp : Ax ≥ b such that the second stage mixedinteger program, K(x), cannot be convexified by adding all parametric inequalities either a priori(like the ones in [9, 24]) or in succession (like the ones in [38, 40]). As a result, for all two-stageMIPs in Benders’ form, a set of all parametric inequalities is not sufficient to provide the secondstage optimal solution y ∈ K(x) for each feasible and integral first stage solution.
Example 1. Consider the following two-stage MIP in Benders’ form:
min cx+ gy (7)
s.t. x− y ≥ −4 (8)
x+ 3y ≤ 16 (9)
3x− 2y ≤ 4 (10)
x+ 2y ≥ 4 (11)
x ≤ 4 (12)
x ∈ Z+, y ∈ Z+. (13)
Here, we have X = Z+, X = x ∈ X : x ≤ 4 = 0, 1, 2, 3, 4, ver(X) = 0, 4, P = (x, y) :(8)− (13) hold, and for x ∈ X,
K(x) = y ∈ Y(x) : y ≤ 4 + x, 3y ≤ 16− x,2y ≥ −4 + 3x, 2y ≥ 4− x
where Y(x) = Z+.
5

𝒙
𝒚
(0, 1)
(0, 2)
(0, 3)
(0, 4)
(0, 5)
(1, 0) (2, 0) (3, 0) (4, 0) (0, 0)
(4, 4)
(1, 5)
(2, 1)
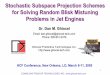
Figure 1: Pictorial representation of conv(P) and Ktight(x), x ∈ X, for Example 1
In Figure 1, the light gray region (including boundaries) represents the convex hull of P. Observethat conv(P) = Phull = Ptight := (x, y) ∈ R+ × R+ : (8) − (12) hold and Ptight is in the(x, y) space, i.e. Projx,y(Ptight) = Ptight. Recall that for x ∈ X, K(x) = Projx=x,y(P) andKtight(x) = Projx=x,y(Ptight). Therefore,
K(0) := y ∈ Z+ : 2 ≤ y ≤ 4, Ktight(0) := y ∈ R+ : 2 ≤ y ≤ 4,K(1) := y ∈ Z+ : 1.5 ≤ y ≤ 5, Ktight(1) := y ∈ R+ : 1.5 ≤ y ≤ 5,K(2) := y ∈ Z+ : 1 ≤ y ≤ 14/3, Ktight(2) := y ∈ R+ : 1 ≤ y ≤ 14/3,K(3) := y ∈ Z+ : 5/2 ≤ y ≤ 13/3, Ktight(3) := y ∈ R+ : 5/2 ≤ y ≤ 13/3,K(4) := y ∈ Z+ : y = 4, Ktight(4) := y ∈ R+ : y = 4.
Note that in Figure 1, the red vertical line segments (or point) represent Ktight(x) for x = 0, 1, 2, 3, 4,and in this example, q2 = 0. Now, we make following observations:
i) conv(K(x)) ⊆ Ktight(x) for all x ∈ X, as proved in Theorem 2,
ii) conv(K(x)) = Ktight(x) for all x ∈ ver(X), as proved in Theorem 2,
iii) conv(K(x)) ⊂ Ktight(x) for all x ∈ 1, 2, 3.
This implies that even if Phull = Projx,y(Ptight), it is not necessary that conv(K(x)) = Projy(Ktight(x))for each x ∈ X, unless X = ver(X).
Remark 1. If X = Zp then ver(X) ⊆ X; and if X = 0, 1p then X = ver(X).
6

The above example raises critical concerns regarding optimally and finitely (in finite iterations)solving a TSSP where ver(X) ⊂ X using parametric inequalities within a decomposition algorithmsimilar to the Benders’ decomposition [13] and L-shaped method [39]. The cause of the followingconcerns is the fact that in general, tightening (or convexifying) the extensive formulation P usingparametric inequalities does not ensure that for x ∈ X\ver(X), conv(K(x)) = Projy(Ktight(x)).
I. Finite Convergence. Given an x ∈ X, there may not exist an integer I(x) < +∞ suchthat the second stage optimal solution y ∈ K(x) can be found in at most I(x) iterationsby using parametric inequalities (added either a priori or in succession) within L-shaped likedecomposition algorithm. Therefore, even after assuming |X| is finite, can we claim that suchalgorithm will terminate or converge after finite iterations, similar to the finitely convergentBenders’ decomposition algorithm?
II. Optimality Concern. Let (x∗, y∗) be the optimal solution of a TSSP with |Ω| = 1 wherex∗ ∈ X\ver(X). The Benders’ decomposition algorithm solves the second stage problem,mingy : y ∈ K(x∗), and gives a feasible solution (x∗, y∗) for (7)-(13). However, sincex∗ ∈ X\ver(X), it is not clear whether solving the relaxed second stage linear program,mingy : y ∈ Projy(Ktight(x∗)) will provide the optimal solution (x∗, y∗) or not. Therefore,can we claim that using parametric inequalities (added either a priori or in succession) withinBenders’ decomposition algorithm will provide the optimal solution of (5)?
Remark 2. As per our knowledge, the concerns related to providing an exact and finitely conver-gent algorithm for TSSPs have not been explicitly stated in literature except in [16] where theseconcerns have been briefly mentioned. Nevertheless, Cen [16] provides a heuristic based on dynamicprogramming to approximately solve the TSSP with only one integer variable in first stage. Healso presents an approach using Fenchel cutting planes to obtain upper and lower bounds on theoptimal value, and a sub-optimal integer solution. In addition, this approach is forced to terminateby setting an upper bound on the number of iterations.
In this paper, for the first time, we resolve the aforementioned concerns by providing exact andfinitely convergent Algorithms 1 and 2 (in Section 4) to solve a class of TSSPs where ver(X) ⊆ X,which subsumes TSSPs with pure integer (or binary) variables in the first stage. In Algorithms 1 and2, we add parametric inequalities a priori and in succession, respectively, within a decompositionalgorithm. Using proposition 1, we show that these algorithms provide optimal solution and andin Theorems 10 and 11, we provide conditions under which they are finitely convergent.
Proposition 1. Given c ∈ Rp and g ∈ Rq, let Q(x) := mingT y : y ∈ K(x) and QLP (x) :=mingT y : y ∈ Projy(Ktight(x)). If Phull = Projx,y(Ptight) then Q(x) = QLP (x) for x ∈ ver(X) ∪x∗ where ver(X) is the set of vertices of conv(X) and (x∗, y∗) is the optimal solution of (5).
Proof. Assume that conv(P) = Phull = Projx,y(Ptight). First let x ∈ ver(X) where ver(X) is theset of vertices of conv(X). According to Theorem 2, conv(K(x)) = Projy(Ktight(x)). Therefore,Q(x) = QLP (x) for x ∈ ver(X). Now, let (x∗, y∗) be the optimal solution of (5). Because of ourassumption, (x∗, y∗) should also be the optimal solution of minΠ(x, y) : (x, y) ∈ Projx,y(Ptight)and therefore, y∗ ∈ Projy(Ktight(x∗)) = Projx=x∗,y(Ptight). Assume that y 6= y∗ is the optimal
solution of QLP (x∗). This implies that gT y < gT y∗ or Π(x∗, y) < Π(x∗, y∗), which is a contradictionas (x∗, y) ∈ Projx,y(Ptight). Hence, y = y∗ and Q(x∗) = QLP (x∗). This completes the proof.
7

2.2 Convexifying second stage MP in two-stage stochastic programs
We now present conditions under which the convexificaton of the second stage of a TSSP can beused to relax the restrictions, if any, on the corresponding second stage variables in the problem.By assuming that Ω is a finite set and the probability of occurrence of scenario ω ∈ Ω is pw, wecan re-write (1) as a large-scale MOP:
min cTx+∑ω∈Ω
pωg(ω)T y(ω) (14)
s.t. Ax ≥ b (15)
T (ω)x+W (ω)y(ω) ≥ r(ω), ω ∈ Ω (16)
x ∈ X , y(ω) ∈ Y(ω, x), ω ∈ Ω. (17)
We denote the feasible region of this formulation, which is also referred to as the extensive formu-lation of the TSSP, by P := (x, y) : (15) − (17) hold where y = y(ω), ω ∈ Ω. Also, let Phullbe a formulation such that conv(Phull) = conv(P) and Π(x, y) = cTx +
∑ω∈Ω pωg(ω)T y(ω). For
ω ∈ Ω and x ∈ X, assume that for known N1(ω), N2(ω), N3(ω), and d(ω) matrices (or vectors),we have
Ktight(ω, x) := (y(ω), u(ω)) ∈ Rq × Rq2 :
W (ω)y(ω) ≥ r(ω)− T (ω)x,
N2(ω)y(ω) +N3(ω)u(ω) ≥ d(ω)−N1(ω)x.
Lemma 1. Let ω1 ∈ Ω. If conv(K(ω1, x)) = Projy(Ktight(ω1, x)) for all x ∈ X, then Phull =Projx,y(P1
tight) where
P1tight := T (ω)x+W (ω)y(ω) ≥ r(ω), ω ∈ Ω,
N1(ω1)x+N2(ω1)y(ω1) +N3(ω1)u(ω1) ≥ d(ω1)
x ∈ X, y(ω1) ∈ Rq, u(ω1) ∈ Rq2 , y(ω) ∈ Y(ω, x), ω ∈ Ω\ω1.
Proof. Similar to the proof of Theorem 1, let (x∗, y∗), (x, y, u), and y be the optimal solutions ofminΠ(x, y) : (x, y) ∈ P, minΠ(x, y) : (x, y, u) ∈ P1
tight, and minΠ(x, y(ω1), y(ω2), . . . , y(ω|Ω|)) :y(ω1) ∈ K(ω1, x), respectively. Since K(ω1, x
∗) = Projx=x∗,y(ω1)(P), y∗(ω1) ∈ K(ω1, x∗). Now,
for all x ∈ X and ω1 ∈ Ω, if conv(K(ω1, x)) = Projy(Ktight(ω1, x)) then there exists a vec-tor u∗(ω1) ∈ Rq2 such that (y∗(ω1), u∗(ω1)) ∈ Ktight(ω1, x
∗). Hence, (x∗, y∗, u∗) ∈ P1tight as
Ktight(ω1, x∗) = Projx=x∗,y(ω1)(P1
tight), implying that P1tight is an extended formulation of P, i.e.,
Phull ⊆ Projx,y(P1tight) or Π(x, y) ≤ Π(x∗, y∗). Also, since (x, y) ∈ P, Π(x∗, y∗) ≤ Π(x, y) because
(x∗, y∗) is the optimal solution. Therefore, for each c ∈ Rp and g(ω) ∈ Rq, ω ∈ Ω, we have
Π(x, y) ≤ Π(x∗, y∗) ≤ Π(x, y). (18)
Since Ktight(ω1, x) = Projx=x,y(ω1)(P1tight), (y(ω1), u(ω1)) ∈ Ktight(ω1, x) or y ∈ conv(K(ω1, x)).
Let y(ω1) =∑
i λiyi(ω1) such that
∑i λi = 1, λi ≥ 0, and yi(ω1) ∈ K(ω1, x), i.e. yi(ω1) are
the vertices of conv(K(ω1, x)). This implies that g(ω1)T y(ω1) =∑
i λi(g(ω1)T yi(ω1)) which meanseither g(ω1)T y(ω1) = g(ω1)T yi(ω1) for all i such that λi > 0 or g(ω1)T y(ω1) > g(ω1)T yi(ω1)
8

for some i with λi > 0. The latter case is not possible because it contradicts the optimalityof (x, y). Furthermore, g(ω1)T y(ω1) ≤ g(ω1)T yi(ω1) for all i because of optimality, and henceΠ(x, y) ≤ Π(x, y). Using inequalities (18), we get Π(x, y) = Π(x∗, y∗) = Π(x, y) for each c ∈ Rpand g(ω) ∈ Rq, ω ∈ Ω, which implies that Phull = Projx,y(P1
tight).
Remark 3. Bansal et al. (Lemma 1) [9] provide an alternate proof for the above result forTSS-MIPs, a special case of TSSP where X = Zp1 × Rp−p1 and Y(ω, x) = Zq × Rq−q1 for all(ω, x) ∈ (Ω, X).
Theorem 3. If conv(K(ω, x)) = Projy(Ktight(ω, x)) for all (x, ω) ∈ (X,Ω) then Phull = Projx,y(Ptight),where
Ptight := T (ω)x+W (ω)y(ω) ≥ r(ω), ω ∈ Ω,
N1(ω)x+N2(ω)y(ω) +N3(ω)u(ω) ≥ d(ω), ω ∈ Ω,
x ∈ X, y(ω) ∈ Rq, u(ω) ∈ Rq2 ω ∈ Ω.
Remark 4. The proof of this theorem is same as the proof given by Bansal et al. (Theorem 5) [9]for TSS-MIPs; but for the sake of completeness, we re-write the proof.
Proof. The proof follows Lemma 1 and an induction over ω ∈ Ω = ω1, . . . , ω|Ω|. According toLemma 1, if conv(K(ω1, x)) = Projy(Ktight(ω1, x)) for all x ∈ X, then Phull = Projx,y(P1
tight).Now, assume that for all x ∈ X, conv(K(ω2, x)) = Projy(Ktight(ω2, x)). Then by consideringPhull = Projx,y(P1
tight) and using the arguments similar to the proof of Lemma 1, we can prove that
Phull = Projx,y(P2tight), where
P2tight := T (ω)x+W (ω)y(ω) ≥ r(ω), ω ∈ Ω,
N1(ω1)x+N2(ω1)y(ω1) +N3(ω1)u(ω1) ≥ d(ω1)
N1(ω2)x+N2(ω2)y(ω2) +N3(ω2)u(ω2) ≥ d(ω2)
x ∈ X, y(ω1), y(ω2) ∈ Rq, u(ω1), u(ω2) ∈ Rq2 ,y(ω) ∈ Y(ω, x), ω ∈ Ω\ω1, ω2.
Next, we apply above discussed steps one by one for ωi, i = 3, . . . , |Ω|, by considering Phull =Projx,y(P i−1
tight) and assuming that conv(K(ωi, x)) = Projy(Ktight(ωi, x)) for all x ∈ X. This gives
Phull = Projx,y(P|Ω|tight) = Projx,y(Ptight) and completes the proof.
Corollary 1. If conv(K(ω, x)) = Projy(Ktight(ω, x)) for all (x, ω) ∈ (X,Ω), then the functionEω[Q(ω, x)] is piecewise linear convex in x.
Corollary 2. If conv(K(ω, x)) = Projy(Ktight(ω, x)) for a given (ω, x) ∈ Ω×X, then the recoursefunction Q(ω, x) is underestimated by
Q(ω, x) ≥ (r(ω)Tπ∗1(ω) + d(ω)Tπ∗2(ω))− (T (ω)Tπ∗1(ω) +N1(ω)Tπ∗2(ω))x
where (π∗1(ω), π∗2(ω)) is the dual optimal solution of the linear programming problem: ming(ω)T y(ω) :(y(ω), u(ω)) ∈ Ktight(ω, x)).
9

We now show how a tight (extended) formulation of a substructure of the extensive formulationof TSSP, defined by
P(ω) := (x, y(ω)) ∈ X × Y(ω, x) : T (ω)x+W (ω)y(ω) ≥ r(ω),
for ω ∈ Ω, can be used to get valid parametric inequalities for the second stage of the problem.Later, we will present examples of TSSPs for which these inequalities are sufficient to convexify thesecond stage programs with disjunctive constraints or semi-continuous variables. Let Phull(ω) be aformulation such that conv(Phull(ω)) = conv(P(ω)).
Corollary 3. For ω ∈ Ω, let
Ptight(ω) := (x, y(ω), u(ω)) ∈ X × Rq × Rq2 :
T (ω)x+W (ω)y(ω) ≥ r(ω)
N1(ω)x+N2(ω)y(ω) +N3(ω)u(ω) ≥ d(ω).
If Phull(ω) = Projx,y(Ptight(ω)) then conv(K(ω, x)) ⊆ Projy(Ktight(ω, x)) for all x ∈ X andconv(K(ω, x)) = Projy(Ktight(ω, x)) for all x ∈ ver(X) where ver(X) is the set of vertices ofconv(X).
Corollary 4. For ω ∈ Ω, Phull = conv(∩ω∈Ω\ωP(ω)) ∩ Projx,y(Ptight(ω)) if conv(K(ω, x)) =Projy(Ktight(ω, x)) for all x ∈ X.
Corollary 5. If conv(K(ω, x)) = Projy(Ktight(ω, x)) for all (x, ω) ∈ (X,Ω) then Phull is given by∩ω∈ΩProjx,y(Ptight(ω)).
Bansal et al. (Theorems 6 and 7) [9] demonstrated the significance of the above results byconsidering TSS-MIPs having special cases of the parametrized continuous multi-mixing set [8, 10,11, 12] in the second stage.
3. Necessary background on disjunctive programming
As mentioned before, a disjunctive program is a linear program with disjunctive constraints, i.e.linear inequalities connected by ∨ (“or”, disjunction) logical operations. Given non-empty poly-hedra Ri := z ∈ Rn : Eiz ≥ f i, i ∈ L, the disjunctive normal form representation for the setR = ∪i∈LRi is ∨i∈L
(Eiz ≥ f i
), where
Ei =
(E1
Ei2
)and f i =
(f1
f i2
), i ∈ L.
Let R0 := z ∈ Rn : E1z ≥ f1 be the linear programming relaxation of R. In this section, webriefly review the results developed in [3, 4, 5] for disjunctive programming problems to provide thenecessary background for the results in the following sections. Theorem 4 provides a tight extendedformulation for the convex hull of the points satisfying disjunctive constraints. Theorems 5 and 6provide the convex hull description of the union of the polyhedra, ∪i∈LRi, in the original z-space.
10

Theorem 4 ([3, 4]). The closed convex hull of ∪i∈LRi is the projection of the following extendedformulation (19), denoted by RTEF , onto the z-space:
z =∑i∈L
ζi
Eiζi ≥ f iζi0, i ∈ L∑i∈L
ζi0 = 1
(ζi, ζi0) ≥ 0, i ∈ L.
(19)
Theorem 5 ([3, 4]). The projection of RTEF onto the z-space is given by:
Projz(RTEF ) = z ∈ Rn : αz ≥ β for all (α, β) ∈ C0
where C0 := (α, β) ∈ Rn+1 : α = σiEi, β = σif i for some σi ≥ 0, i ∈ L. Let Rhull =conv(∪i∈LRi). Then, the cone of all valid inequalities for Rhull, denoted by R∗hull, is same asthe polyhedral cone C0, i.e.
R∗hull := (α, β) ∈ Rn+1 : αz ≥ β for all z ∈ Rhull= (α, β) ∈ Rn+1 : α = σiEi, β = σif i for some σi ≥ 0, i ∈ L.
Theorem 6 ([3, 4]). Assuming Rhull is full dimensional. The inequality αz ≥ β defines a facet ofRhull if and only if (α, β) is an extreme ray of the cone R∗hull.
Since the logical operations ∨ (disjunction) and ∧ (“and”, conjunction) obey the distributivelaw, i.e., (a1 ∧ a2) ∨ (b1 ∧ b2) = (a1 ∨ b1) ∧ (a1 ∨ b2) ∧ (a2 ∨ b1) ∧ (a2 ∨ b2), the set R can also bewritten in the conjunctive normal form as
z ∈ Rn : E1z ≥ f1,m∧j=1
∨i∈Lj
diz ≥ di0
where |Lj | = |L| for j = 1, . . . ,m and each disjunction j contains exactly one inequality from thesystem Ei2z ≥ f i2, i ∈ L. The disjunctive set R is called facial if each inequality diz ≥ di0, i ∈ Lj ,j = 1, . . . ,m, defines a face of R0. In this paper, we introduce a new concept of “super-facial”disjunctive set, which is defined as follows.
Definition 1. A disjunctive set R is called super-facial if it is a facial set and for each z ∈ R,R0 ∩ z = z is also a face of R0, i.e., z ∈ R is a vertex of conv(R).
Remark 5. The set of feasible solutions of a mixed 0-1 program is facial, but not super-facial;whereas the set of feasible solutions of a pure 0-1 program is super-facial.
Theorem 7 ([3, 4]). If R is facial then Πm = conv(R), where Π0 := R0,
Πj := conv
Πj−1 ∩z :
∨i∈Lj
diz ≥ di0 ,
for j = 1, . . . ,m.
11

According to Theorem 7, the convex hull of the facial disjunctive setR can be obtained in a sequenceof m steps, where at each step the convex hull of points satisfying only one disjunctive constraintsis generated. This property is referred to as the sequential convexification, and a subclass of DPswhich satisfy this property is called sequentially convexification DPs. Balas et al. [7] extend thesequential convexification property for a general non-convex set with multiple constraints. Theyprovide the necessary and sufficient conditions under which reverse convex programs (DPs withinfinitely many terms) are sequentially convexifiable, and present classes of problems, in additionto facial DPs, which always satisfy the sequential convexification property.
4. Two-stage stochastic disjunctive programs (TSS-DPs)
In this section, we introduce two-stage stochastic disjunctive programs (TSS-DPs) which are TSSPswith disjunctive constraints in both first and second stages. We explicitly write a TSS-DP as follows:
min cTx+ Eω[Q(ω, x)]
s.t. Ax ≥ b
x ∈∨s∈S
(Dsx ≥ ds)
x ∈ Rp
(20)
where S,Ω are finite sets, and for any scenario ω of Ω and a finite set H,
Q(ω, x) := min g(ω)T y(ω) (21)
s.t. W (ω)y(ω) ≥ r(ω)− T (ω)x (22)∨h∈H
(Dh
1 (ω)y(ω) ≥ dh0(ω)−Dh2 (ω)x
)(23)
y(ω) ∈ Rq. (24)
We re-write the disjunctive constraint in the first stage, i.e.∨s∈S(Dsx ≥ ds), and constraint (23)
in the conjunctive normal form (based on the above mentioned definition) as
m1∧j=1
∨i∈Sj
µix ≥ µi0
and
m2∧j=1
∨i∈Hj
ηi1(ω)y(ω) ≥ ηi0(ω)− ηi2(ω)x
,
respectively. Here each disjunction j contains exactly one inequality from each system of in-equalities in the corresponding disjunctive constraint, i.e. |Sj | = |S| and |Hj | = |H|. Weuse the notations X, P, Phull, P(ω) and Ptight(ω) for ω ∈ Ω, and K(ω, x) and Ktight(ω, x) for(ω, x) ∈ Ω ×X, same as defined for TSSPs in the previous sections, except that Y(ω) = y(ω) ∈Rq :
∨h∈H
(Dh
1 (ω)y(ω) ≥ dh0(ω)−Dh2 (ω)x
) and X := x ∈ Rp :
∨s∈S(Dsx ≥ ds). Letting
W h(ω) :=
(W (ω)
Dh1 (ω)
), T h(ω) :=
(T (ω)
Dh2 (ω)
), rh(ω) :=
(r(ω)
dh0(ω)
),
and Kh(ω, x) := y(ω) ∈ Rq+ : W h(ω)y(ω) ≥ rh(ω)− T h(ω)x 6= ∅ for (ω, x, h) ∈ (Ω, X,H), we get
K(ω, x) =⋃h∈HKh(ω, x) =
∨h∈H
(W h(ω)y(ω) ≥ rh(ω)− T h(ω)x
).
12

where Kh, for each h ∈ H, is a polyhedral set, and
P(ω) =
(x, y(ω)) : x ∈ X,
∨h∈H
(T h(ω)x+W h(ω)y(ω) ≥ rh(ω)
).
Also, let XLP := x ∈ Rp : Ax ≥ b and KLP (ω, x) := y(ω) ∈ Rq : (22) hold for (ω, x) ∈ (Ω, X).In the following theorems, we extend the result of Balas [3, 4] for DP (Theorem 4) by providingconditions to get a linear programming equivalent for the second stage of TSS-DPs, i.e. K(ω, x).Theorem 8. If the disjunctive set X is super-facial (according to Definition 1) then conv(K(ω, x)) =Projy(ω)(Ktight(ω, x)) for all (x, ω) ∈ (X,Ω) where
Ktight(ω, x) :=
∑h∈H
ξh1 (ω)− y(ω) = 0∑h∈H
ξh2 (ω) = x
W h(ω)ξh1 (ω) + T h(ω)ξh2 (ω) ≥ rh(ω)ξh0 (ω), h ∈ H∑h∈H
ξh0 (ω) = 1
y(ω) ∈ Rq,
ξh1 (ω) ∈ Rq+, ξh2 (ω) ∈ Rp+, ξh0 (ω) ∈ R+, h ∈ H.
(25)
Proof. Using Theorem 4, we derive a tight extended formulation for P(ω), ω ∈ Ω, which is givenby
Ptight(ω) :=
y(ω) =
∑h∈H
ξh1 (ω)
x =∑h∈H
ξh2 (ω)
W h(ω)ξh1 (ω) + T h(ω)ξh2 (ω) ≥ rh(ω)ξh0 (ω), h ∈ H∑h∈H
ξh0 (ω) = 1
x ∈ X, y(ω) ∈ Rq,
ξh1 (ω) ∈ Rq+, ξh2 (ω) ∈ Rp+, ξh0 (ω) ∈ R+, h ∈ H.
(26)
This means conv(P(ω)) = Projx,y(ω)(Ptight(ω)) for ω ∈ Ω. Let x ∈ X = x ∈ Rp : Ax ≥b,∧m1j=1
(∨i∈Sj
µix ≥ µi0). Therefore, for each j ∈ 1, . . . ,m1, there exist at least one inequality
µix ≥ µi0, i ∈ Sj , such that µix ≥ µi0. Let the disjunctive set X be super-facial, i.e. eachXi := XLP ∩ x ∈ Rp : µix ≥ µi0 is a face of XLP , for all i ∈ Sj , and X ∩ x = x is also a faceof XLP . As a result, x ∈ ver(X) where ver(X) is the set of vertices of conv(X). Now using thearguments similar to the ones used in the proof of Theorem 2, we can prove that conv(K(ω, x)) =Projy(ω)(Ktight(ω, x)) = Projx=x,y(ω)(Ptight(ω)) for all (ω, x) ∈ (Ω, X).
13

Theorem 9. If X is super-facial then Phull = Projx,y(Ptight), where
Ptight :=
y(ω) =
∑h∈H
ξh1 (ω) ω ∈ Ω
x =∑h∈H
ξh2 (ω), ω ∈ Ω
W h(ω)ξh1 (ω) + T h(ω)ξh2 (ω) ≥ rh(ω)ξh0 (ω), ω ∈ Ω, h ∈ H∑h∈H
ξh0 (ω) = 1 ω ∈ Ω
x ∈ X, y(ω) ∈ Rq, ω ∈ Ω
ξh1 (ω) ∈ Rq+, ξh2 (ω) ∈ Rp+, ξh0 (ω) ∈ R+, ω ∈ Ω, h ∈ H.
Proof. We assume that the disjunctive set X is super-facial. Therefore, according to Theorem 8,conv(K(ω, x)) = Projy(ω)(Ktight(ω, x)) for all (x, ω) ∈ (X,Ω). Now, because of Theorem 3, wecan deduce that Phull = Projx,y(Ptight) where Ptight = ∩ω∈ΩPtight(ω) such that Ktight(ω, x) =Projx=x,y(ω)(Ptight(ω)) for all (x, ω) ∈ (X,Ω) .
Next, we present two decomposition algorithms similar to the Benders’ decomposition [13] andL-shaped method [39] to solve: (i) General TSS-DPs (20) using convexification result in Theorem8 and (ii) TSS-DPs (20) where disjunctive constraints (23) in the second stage are sequentiallyconvexifible. We also provide conditions under which these algorithms are finitely convergent.
4.1 Decomposition algorithm for general TSS-DPs
The pseudocode of a decomposition algorithm which utilizes our convexification approach (in par-ticular, Theorem 8) to solve general TSS-DPs (20) is given by Algorithm 1. Let LB and UB be thelower bound and upper bound, respectively, on the optimal solution value of a given TSS-DP. Wedenote the following strengthened linear programming relaxation of the second stage disjunctiveprogram (21)-(24) by SLP(ω, x), (ω, x) ∈ (Ω, X):
QLP (ω, x) := ming(ω)T y(ω) : y(ω) ∈ Projy(ω)(Ktight(ω, x)), (27)
where Ktight(ω, x) is defined by (25). Also, let π∗(ω, x) be the optimal dual multipliers obtainedby solving SLP(ω, x) for a given (ω, x) ∈ (Ω, X), and Ktight(ω, x) be written in a compact form as
N2(ω)y(ω) +∑h∈HNh
3 (ω)ξh1 (ω) +Nh4 (ω)ξh2 (ω) +Nh
5 (ω)ξh0 (ω) ≥ ∆(ω)−N1(ω)x
y(ω) ∈ Rq, ξh1 (ω) ∈ Rq+, ξh2 (ω) ∈ Rp+, ξh0 (ω) ∈ R+, h ∈ H.
Then, the corresponding optimality cut, OC(x), is∑ω∈Ω
pωπ∗(ω, x)T (∆(ω)−N1(ω)x) ≥ θ. (28)
14

Algorithm 1 Decomposition Algorithm for General TSS-DPs (20)
1: Initialization: l← 1, LB ← −∞, UB ←∞. Assume x1 ∈ X.2: while UB − LB > ε do . ε is a pre-specified tolerance
3: for ω ∈ Ω do4: Solve linear program SLP(ω, xl);5: y∗(ω, xl)← optimal solution; QLP (ω, xl)← optimal solution value;6: π∗(ω, xl)← optimal dual multipliers;7: end for8: if y∗(ω, xl) ∈ K(ω, xl) for all ω ∈ Ω and UB > cTxl +
∑ω∈Ω pωQLP (ω, xl) then
9: UB ← cTxl +∑
ω∈Ω pωQLP (ω, xl);10: if UB ≤ LB + ε then11: Go to Line 27;12: end if13: end if14: Derive optimality cut OC(xl) using (28);15: Add OC(xl) to Ml−1 to get Ml;16: Solve master problem Ml;17: xl+1 ← optimal solution; LB ← optimal solution value;18: if xl+1 = xl then . Alternate optimal solutions
19: X l ← set of x components of all alternative optimal solutions of Ml;20: for all x ∈ X l\xl+1 do21: Repeat Lines 3-13 where xl = x;22: end for23: end if24: l← l + 1;25: end while26: return (xl, y(ω, xl)ω∈Ω),UB
These cuts help in deriving a lower bounding approximation of the first stage problem (20), definedby
min cTx+ θ
s.t. x ∈ X∑ω∈Ω
pω(π∗(ω, xk)T (∆(ω)−N1(ω)x)) ≥ θ, for k = 1, . . . , l,(29)
where xk ∈ X for k = 1 . . . , l. We denote problem (29) by Ml for l ∈ Z+ and refer to it as themaster problem at iteration l. Note that M0 is the master problem without any optimality cut.
Now we initialize Algorithm 1 by setting LB to negative infinity, UB to positive infinity, iterationcounter l to 1, and selecting a first stage feasible solution x1 ∈ X (Line 1). At each iteration l ≥ 1,we solve linear programs SLP(ω, xl) for all ω ∈ Ω and store the corresponding optimal solutiony∗(ω, xl), the optimal objective valueQLP (ω, xl) := g(ω)T y∗(ω, xl), and the optimal dual multipliersπ∗(ω, xl), for each ω ∈ Ω (Lines 3-7). Interestingly, in case y∗(ω, xl) ∈ K(ω, xl) for all ω ∈ Ω, we havea feasible solution (xl, y∗(ω1, x
l), . . . , y∗(ω|Ω|, xl)) for the original problem. Therefore, we update
UB if the solution value corresponding to thus obtained feasible solution is smaller than the existingbest known upper bound (Lines 8-9). We also utilize this stored information to derive optimalitycut OC(xl) using (28) and add this cut to the master problem Ml−1 to get an augmented master
15

problem Ml (Lines 14-15). We solve Ml and since it is a lower bounding approximation of (20),we use the optimal solution value associated with Ml to update LB . It is important to note thatthe lower bound LB is a non-increasing function with respect to the iterations. This is becauseMl−1 is a relaxation of Ml for each l ≥ 1. Therefore, after every iteration the difference betweenthe bounds, UB −LB , either decreases or remains same as in previous iteration. We terminate ouralgorithm when this difference becomes zero, i.e., UB = LB , or reaches a pre-specified toleranceε (Line 2 or Lines 10-12), and return the optimal solution (xl, y(ω, xl)ω∈Ω) and the optimalobjective value UB .
While solving a TSS-DP (20) with alternative optimal solutions using Algorithm 1, it is pos-sible that at some iteration l, the optimal solution, xl+1, obtained after solving Ml is same asxl and there exists an ω ∈ Ω such that the second stage optimal solution y∗(ω, xl) obtainedby solving SLP(ω, xl) does not belongs to K(ω, xl). This results in a non-terminating loop, re-ferred to as cycling. Therefore, to avoid such cycling, we add a preventive measure in Algo-rithm 1, i.e., Lines 18-23. Notice that whenever xl+1 = xl, LB or cTxl +
∑ω∈Ω pωQLP (ω, xl)
gives the optimal objective value for the TSS-DP. Although (xl, y∗(ω, xl)ω∈Ω) does not belongto P, there exist feasible solutions (x1, y1(ω)ω∈Ω) ∈ P and (x2, y2(ω)ω∈Ω) ∈ P such that(xl, y∗(ω, xl)ω∈Ω) = λ(x1, y1(ω)ω∈Ω) + (1 − λ)(x2, y2(ω)ω∈Ω) for λ ∈ (0, 1). Let (xl, θl =∑
ω∈Ω pωg(ω)T y∗(ω, xl)) be the optimal solution ofMl. SinceMl is a lower bound approximation,
both (x1, θ1 =∑
ω∈Ω pωg(ω)T y1(ω)) and (x2, θ2 =∑
ω∈Ω pωg(ω)T y2(ω)) are feasible solutions of
Ml. Observe that (xl, θl) = λ(x1, θ1)+(1−λ)(x2, θ2) for λ ∈ (0, 1). Therefore, (x1, θ1) and (x2, θ2)also belong to the set of alternative optimal solutions of Ml. We denote the set of x componentsof all alternative optimal solutions of Ml by X l ⊆ X. Now, for each x ∈ X l\xl+1, we solvesubproblems SLP(ω, x), ω ∈ Ω, and find a feasible solution which is also the optimal solution for(20) (Lines 19-22).
Corollary 6. Given (ω, x) ∈ (Ω, X), QLP (ω, x) ≤ Q(ω, x). If x ∈ ver(X) ∪ x∗ where ver(X)is the set of vertices of X and (x∗, y∗) is the optimal solution of (20), then there exists a solutiony(ω) ∈ K(ω, x) such that y(ω) is the optimal solution for QLP (ω, x) and QLP (ω, x) = Q(ω, x).
Proof. Let (ω, x) ∈ (Ω, X). Observe that in SLP(ω, x), the set of feasible solutions Ktight(ω, x)is equivalent to the projection of Ptight(ω), defined by (26), on (x = x, y(ω)) space. Sinceconv(P(ω)) = Projx,y(ω)(Ptight(ω)), using Theorem 2, we know that conv(K(ω, x)) ⊆ Ktight(ω, x).This implies that QLP (ω, x) ≤ Q(ω, x). Now, if x is a vertex of X then again according to Theorem2, conv(K(ω, x)) = Ktight(ω, x). This means that there exists a solution y(ω) ∈ K(ω, x) such thaty(ω) is the optimal solution for QLP (ω, x) and QLP (ω, x) = Q(ω, x); and this last statement is alsotrue for x = x∗ because of Proposition 1.
Theorem 10 (Convergence Result). Algorithm 1 solves the TSS-DP (20) to optimality in finitelymany iterations if assumptions (iii)-(iv), defined in Section 1, are satisfied and |X | is finite.
Proof. We assume that |X | is finite and therefore, the number of first stage feasible solutions Xis also finite. In Algorithm 1, for a given xl ∈ X, we solve |Ω| number of linear programs, i.e.SLP(ω, xl) for all ω ∈ Ω, and if needed, a master problem Ml (after adding an optimality cut).Notice that the master problem has disjunctive constraints where the set S is finite (see (20)), andalso Ω is finite. Therefore, Lines 3-17 in Algorithm 1 are performed in finite iterations. Basedon Corollary 6, it is clear that if (x∗, y∗) is the optimal solution of the TSS-DP (20), then forxl = x∗, Algorithm 1 returns the optimal solution for the problem in finite iterations as |X| is
16

finite. Furthermore, in case of alternative optimal solutions, because of Lines 18-23, cycling doesnot occur in this algorithm and it terminates after finite iterations with the optimal solution as|X l| is also finite.
In case the disjunctive set X is super-facial then for all xl ∈ X, the convex hull of K(ω, xl),ω ∈ Ω, is given by Projy(ω)(Ktight(ω, xl)). Therefore, solving SP(ω, xl) in Line 4 of Algorithm
1 gives the optimal solution y∗(ω, xl) ∈ K(ω, xl). As a result, cycling does not occur is suchcases. As mentioned before, first stage program with pure 0-1 variables is one such example.Hence, the algorithms developed by Gade et al. [21] and Sherali and Fraticelli [37] for TSSP withX := 0, 1p, where P(ω) is convexified after finite iterations using parametric Gomory cuts andreformulation-linearization technique, respectively, do not face the concerns of cycling. But thealgorithms developed for TSSPs with X := Zp (or Z × Zp−1
+ ), where parametric inequalities areadded either a priori or in succession, may not converge after finite iterations until the measuresto avoid cycling are incorporated. We explain this claim using Example 1 where |Ω| = 1 andP(= P(ω)) is integral.
Example 1 (continued). Let c = −3 and g = 2. Then the optimal solution for problem (7)-(13)is (2,1) or (4,4) with optimal objective value equal to −4. While solving this problem using adecomposition algorithm similar to Algorithm 1, assume that xl = 3 at some iteration l. SinceP is integral, there is no need to add any parametric inequality, or in other words, addition ofany type of parametric inequality will be redundant. Now, solving the second stage problem forxl = 3 and the feasible region Ktight(xl) = y ∈ R+ : 5/2 ≤ y ≤ 13/3 gives the optimal solutiony∗(xl) = 5/2 and optimal objective value cxl + gy∗(xl) = −4. Since lower bound cannot be furtherimproved, addition of Benders’ cut to the master problemMl does not cut xl and hence, resolvingthe updated masters problemMl+1 gives xl+1 = xl = 3. This gives rise to a non-terminating loop,i.e. cycling in the absence of any preventive measure. However, using Lines 18-23 in Algorithm 1,we can prevent the cycling as follows. Let X l be the set of x components of all alternative optimalsolutions of Ml, i.e. X l := 2, 3, 4. Now, we solve the second stage problem for xl = 2 and thefeasible region Ktight(2) = y ∈ R+ : 1 ≤ y ≤ 14/3 and get the optimal solution y∗(xl) = 1. Since(2, 1) ∈ P, Algorithm 1 updates the UB to −4 and the algorithm terminates because UB havebecome equal to LB .
Remark 6. Zhang and Kucukyavuz [40] extend the algorithm of Gade et al. [21] for solving TSS-MIPs with pure integer variables in the both stages. In their algorithms, the parametric inequalitiesare added in succession and the master problems are solved by adding finite number of Gomory cutand then solving the linear program using the lexicographic dual simplex method. As a result, ateach iteration l, xl is the extreme point of the associated polyhedron and in case of alternative op-timal solutions, their algorithms consider lexicographically smallest solution. This prevents cyclingin their algorithms and hence, provide finitely convergent algorithms.
Remark 7. It is important to note that instead of solving the master problem (29) to optimality ateach iteration, a branch-and-cut approach can also be adopted for a practical implementation. Inthis approach, similar to the integer L-shaped method [26], a linear programming relaxation of themaster problem is solved. The solution thus obtained is used to either generate a feasibility cut (ifthis current solution violates any of the relaxed constraints), or create new branches/nodes followingthe usual branch-and-cut procedure. The (globally valid) optimality cut, OC(x), is derived at anode whenever the current solution is also feasible for the original master problem. Interestingly,because of the finiteness of the branch-and-bound approach, it is easy to prove the finite convergence
17

of this algorithm under the conditions mentioned in Theorem 10.
4.2 Decomposition algorithm for TSS-DP with sequentially convexifiable DPsin the second stage
We present a decomposition algorithm to solve TSS-DPs with sequentially convexifiable DPs inthe second stage, which we refer to as TSS-SC-DPs, by harnessing the benefits of sequential con-vexification property within L-shaped method. As mentioned before, Balas [3, 4] introduced thisproperty of a subclass of DPs, sequentially convexifiable DPs, according to which the convex hull ofa set of points satisfying multiple disjunctive constraints, where each disjunction contains exactlyone inequality, can be derived by sequentially generating the convex hull of points satisfying onlyone disjunctive constraint. In [3, 4], Balas shows that the facial DPs are sequentially convexifiableand later, Balas et al. [7] extend the sequential convexification property for a general non-convexset with multiple constraints. They provide the necessary and sufficient conditions under which re-verse convex programs (DPs with infinitely many terms) are sequentially convexifiable and presentclasses of problems, in addition to facial DPs, which always satisfy the sequential convexificationproperty. In the light of this discussion, it is clear that our algorithm for TSS-SC-DPs is capableto solve various classes of TSSPs.
The pseudocode of our decomposition algorithm is presented in Algorithm 2. In contrast toAlgorithm 1 where we used a priori convexification approach, in Algorithm 2 we add “parametric”cuts in a successive fashion using sequential convexification approach of Balas [3, 4]. Similarto the definitions in Section 4.1, we denote the lower bound and upper bound on the optimalobjective value of a given TSS-SC-DP by LB and UB , respectively. We define subproblem SP(ω, x),(ω, x) ∈ (Ω, X) as follows:
QSP (ω, x) := min g(ω)T y(ω)
s.t. W (ω)y(ω) ≥ r(ω)− T (ω)x
αt(ω)y(ω) ≥ βt(ω)− ψt(ω)x, t = 1, . . . , τ(ω)
y(ω) ∈ Rq,
(30)
where αt(ω) ∈ Rq, ψt(ω) ∈ Rp, and βt(ω) ∈ R are the coefficients of variables y(ω), coefficientsof variables x, and the right hand side, respectively, of a parametric inequality, referred to asthe parametric lift-and-project cut. In Remark 8, we discuss how these parametric inequalitiesare developed in succession using sequential convexification approach of Balas [3, 4]. Now, letπ∗(ω, x) = (π∗0(ω, x), π∗1(ω, x), . . . , π∗τ(ω)(ω, x))T be the optimal dual multipliers obtained by solving
SP(ω, x) for a given (ω, x) ∈ (Ω, X). Then, the corresponding optimality cut, OCS(x), is
∑ω∈Ω
pω
π∗0(ω, x)T (r(ω)− T (ω)x) +
τ(ω)∑t=1
π∗t (ω, x)(βt(ω)− ψt(ω)x)
≥ θ. (31)
These cuts help in deriving a lower bounding approximation of the first stage problem (20), definedby mincx + θ : x ∈ X and OCS(xk) holds, for k = 1, . . . , l where xk ∈ X for k = 1 . . . , l. Wedenote this problem by Ml for l ∈ Z+ and refer to it as the master problem. Note that M0 isthe master problem without any optimality cut. For the sake of convenience, we assume that theTSS-SC-DP solved using Algorithm 2 does not have alternative optimal solutions, but in Remark10, we provide a preventive measure to avoid cycling which can happen while solving TSS-SC-DPswith alternative optimal solutions.
18

Algorithm 2 Algorithm for TSS-SC-DPs using Lift-and-Project Cuts
1: Initialization: l← 1, LB ← −∞, UB ←∞, τ(ω)← 0 for all ω ∈ Ω. Assume x1 ∈ X.2: while UB − LB > ε do . ε is a pre-specified tolerance
3: for ω ∈ Ω do4: Solve linear program SP(ω, xl);5: y∗(ω, xl)← optimal solution; QSP (ω, xl)← optimal solution value;6: end for7: if y∗(ω, xl) /∈ K(ω, xl) for some ω ∈ Ω then8: for ω ∈ Ω where y∗(ω, xl) /∈ K(ω, xl) do . Add parametric inequalities
9: Add the lift-and-project cut to SP(ω, x) as explained in Remark 8;10: Set τ(ω)← τ(ω) + 1 and solve linear program SP(ω, xl);11: y∗(ω, xl)← optimal solution; QSP (ω, xl)← optimal solution value;12: end for13: end if14: if y∗(ω, xl) ∈ K(ω, xl) for all ω ∈ Ω and UB > cTxl +
∑ω∈Ω pωQSP (ω, xl) then
15: UB ← cTxl +∑
ω∈Ω pωQSP (ω, xl);16: if UB ≤ LB + ε then17: Go to Line 27;18: end if19: end if20: π∗(ω, xl)← optimal dual multipliers obtained by solving SP(ω, xl) for all ω ∈ Ω;21: Derive optimality cut OCS(xl) using (31);22: Add OCS(xl) to Ml−1 to get Ml;23: Solve master problem Ml;24: xl+1 ← optimal solution; LB ← optimal solution value;25: l← l + 1;26: end while27: return (xl, y(ω, xl)ω∈Ω),UB
Similar to Algorithm 1, we initialize Algorithm 2 by setting lower bound LB to negative infinity,upper bound UB to positive infinity, iteration counter l to 1, number of parametric inequalitiesτ(ω) for all ω ∈ Ω to zero, and selecting a first stage feasible solution x1 ∈ X (Line 1). At eachiteration l ≥ 1, we solve linear programs SP(ω, xl) for all ω ∈ Ω and store the correspondingoptimal solution y∗(ω, xl) and the optimal solution value QSP (ω, xl) := g(ω)T y∗(ω, xl) for eachω ∈ Ω (Lines 3-6). Now, for each ω ∈ Ω with y∗(ω, xl) /∈ K(ω, xl), we develop parametric lift-and-project cut (as explained in Remark 8), add it to SP(ω, x), resolve the updated subproblemSP(ω, x) by fixing x = xl, and obtain its optimal solution y∗(ω, xl) along with optimal solutionvalue (Lines 8-12). Interestingly, in case y∗(ω, xl) ∈ K(ω, xl) for all ω ∈ Ω, we have a feasiblesolution (xl, y∗(ω1, x
l), . . . , y∗(ω|Ω|, xl)) for the original problem. Therefore, we update UB if the
solution value corresponding to thus obtained feasible solution is smaller than the existing upperbound (Lines 14-15). We also utilize the stored information and optimal dual multipliers (Line20) to derive optimality cut OCS(xl) using (31) and add this cut to the master problem Ml−1 toget an augmented master problem Ml (Lines 21-22). We solve Ml and since it is lower boundingapproximation of (20), we use the optimal solution value associated with Ml to update LB . Itis important to note that the lower bound LB is a non-increasing function with respect to theiterations. This is because Ml−1 is a relaxation of Ml for each l ≥ 1. Therefore, after everyiteration the difference between the bounds, UB − LB , either decreases or remains same as in
19

previous iteration. We terminate our algorithm when this difference becomes zero, i.e., UB = LB ,or reaches a pre-specified tolerance ε (Line 2 or Lines 16-18), and return the optimal solution(xl, y(ω, xl)ω∈Ω) and the optimal solution value UB .
Remark 8. Here we present how a “parametric” lift-and-project cut of the form αt(ω)y(ω) ≥βt(ω)−ψt(ω)x where t = τ(ω)+1, is generated in Algorithm 2 (Line 9). Given a first stage feasiblesolution xl at iteration l, assume that there exists an ω ∈ Ω such that the optimal solution ofSP(ω, xl), i.e. y∗(ω, xl), does not belong to K(ω, xl). This implies that there exists a disjunctiveconstraint,
∨i∈Hj
(ηi1(ω)y(ω) ≥ ηi0(ω)− ηi2(ω)x
), j ∈ 1, . . . ,m, which is not satisfied by the point
(xl, y∗(ω, xl)ω∈Ω). In order to generate an inequality which cuts this point, we first use Theorem4 to get a tight extended formulation for the closed convex hull of
W (ω)y(ω) + T (ω)x ≥ r(ω) (32)
αt(ω)y(ω) + ψt(ω)x ≥ βt(ω), t = 1, . . . , τ(ω) (33)∨i∈Hj
(ηi1(ω)y(ω) + ηi2(ω)x ≥ ηi0(ω)
)(34)
x ∈ X, y(ω) ∈ Rq (35)
where |Hj | = |H|. Then, we project this tight extended formulation in the lifted space to the(x, y(ω)) space using Theorems 5 and 6. Let Pj(ω) := (32) − (35) and its linear programmingequivalent in the lifted space be given by
Pjtight(ω) :=
∑i∈Hj
ξi1(ω)− y(ω) = 0
∑i∈Hj
ξi2(ω)− x = 0
W (ω)ξi1(ω) + T (ω)ξi2(ω) ≥ r(ω)ξi0(ω), i ∈ Hj
αt(ω)ξi1(ω) + ψt(ω)ξi2(ω) ≥ βt(ω)ξi0(ω), i ∈ Hj , t = 1, . . . , τ(ω)
ηi1(ω)ξi1(ω) + ηi2(ω)ξi2(ω) ≥ ηi0(ω)ξi0(ω), i ∈ Hj∑i∈Hj
ξi0(ω) = 1
x ∈ X, y(ω) ∈ Rq,
ξi1(ω) ∈ Rq+, ξi2(ω) ∈ Rp+, ξi0(ω) ∈ R+, i ∈ Hj
.
Using Theorem 5, we derive the projection of Pjtight(ω) onto the (x, y(ω)) space, i.e. Projx,y(ω)(Pjtight(ω)),
which is given by
(x, y(ω)) ∈ Rp × Rq : αy(ω) + ψx ≥ β for all (α,ψ, β) ∈ Cj(ω) (36)
20

where
Cj(ω) :=
(α,ψ, β) ∈ Rp × Rq × R :
α = σi(W (ω)
ηi1(ω)
), α = σi,tc αt(ω), i ∈ Hj , t = 1, . . . , τ(ω)
ψ = σi(T (ω)
ηi2(ω)
), ψ = σi,tc ψt(ω), i ∈ Hj , t = 1, . . . , τ(ω)
β = σi(r(ω)
ηi0(ω)
), β = σi,tc βt(ω), i ∈ Hj , t = 1, . . . , τ(ω)
for some (σi, σic) ∈ Rm2+1+ × Rτ(ω)
+ , i ∈ Hj
.
Next, we solve the following cut-generating linear program (CGLP) to find the most violatedparametric lift-and-project cut among the defining inequalities of (36) for (xl, y∗(ω, xl)):
maxβ − αy∗(ω, xl)− ψxl : (α,ψ, β) ∈ Cj(ω) ∩N (ω), (37)
where N (ω) is a normalization set (defined by one or more constraints) which truncate the coneCj(ω). Let (α∗, ψ∗, β∗) be the optimal solution for (37). Then, for t = τ(ω) + 1, we set αt(ω) = α∗,ψt(ω) = ψ∗, and βt(ω) = β∗ to get the required parametric lift-and-project cut in Line 9 ofAlgorithm 2.
Theorem 11 (Convergence result). Algorithm 2 solves TSS-DP (20) with facial DPs in the sec-ond stage programs to optimality in finitely many iterations if assumptions (iii)-(iv), defined inSection 1, are satisfied and |X | is finite.
Proof. We assume that |X | is finite and therefore, the number of first stage feasible solutions Xis also finite. In Algorithm 2, for a given xl ∈ X, we solve |Ω| number of linear programs, i.e.SP(ω, xl) for all ω ∈ Ω, and if needed, a master problemMl (after adding an optimality cut whichrequires a linear program to be solved). Notice that the master problem has disjunctive constraintswhere the set S is finite (see (20)), and also Ω is finite. Therefore, Lines 3-25 in Algorithm 2 areperformed in finite iterations. Now we have to ensure that the “while” loop in Line 2 terminatesafter finite iterations and provide the optimal solution. Notice that if xl+1 6= xl, then xl will notbe visited again in future iterations because the optimality cut generated in Line 21 cuts xl.
Another possibility is xl+1 = xl which can further be divided into two cases. In first case,we assume that y∗(ω, xl) ∈ K(ω, xl) for all ω ∈ Ω, therefore the lower bound LB = cTxl +∑
ω∈Ω pωgT (ω)y∗(ω, xl) which is equal to UB as (xl, y∗(ω, xl)ω∈Ω) ∈ P is a feasible solution.
This implies that (xl, y∗(ω, xl)ω∈Ω) is the optimal solution and hence, in this case the algorithmterminates after returning the optimal solution and optimal objective value UB . For the secondcase, we assume that for some ω ∈ Ω, y∗(ω, xl) /∈ K(ω, xl). Based on the results of Jeroslow [22], weknow that the addition of finite number of parametric lift-and-projects cuts (Line 9 or Remark 8)can provide Phull(ω). Because of Proposition 1, it is clear that if (x∗, y∗) is the optimal solution ofTSS-SC-DP, then for xl = x∗, Algorithm 2 returns the optimal solution for the problem in finiteiterations. This completes the proof.
21

Remark 9. Algorithm 2 generalizes the algorithm developed in [37, 38] for TSSPs with pure binaryvariables in first stage and mixed 0-1 programs in the second stage, which utilizes the reformulation-linearization technique (RLT) of Sherali and Adams [35, 36] and lift-and-project cuts of Balas etal. [5].
Remark 10. It is important to note that while solving a TSS-SC-DP with alternative optimalsolution using Algorithm 2, it is possible that for a given first stage feasible solution xl at iterationl, no parametric lift-and-project cut is added to SP(ω, x) in Line 9 and solving Ml gives xl+1 = xl
in Line 24. This will result in a non-terminating loop or cycling. In order to avoid cycling, weprovide a preventive measure by incorporating the following modifications in Algorithm 2: Similarto Algorithm 1, in such situation we first store the x components of all alternative optimal solutionsofMl, denoted by X l ⊆ X. Then, for each x ∈ X l\xl+1, we solve subproblems SP(ω, x), ω ∈ Ω,and find a feasible solution belonging to P which is also the optimal solution for the TSS-SC-DP.
5. Two-stage stochastic semi-continuous programs (TSS-SCPs)
In this section, we study two-stage stochastic semi-continuous programs (TSS-SCPs) where secondstage has semi-continuous variables, i.e. TSSP (1) where
Q(ω, x) := min g(ω)T y(ω) (38)
s.t. W (ω)y(ω) ≥ r(ω)− T (ω)x (39)
yi(ω) ∈ [0, li(ω)] ∪ [li(ω), ui(ω)], i = 1, . . . , q1, (40)
yi(ω) ≥ 0, i = q1 + 1, . . . , q, (41)
such that 0 ≤ li(ω) < li(ω) ≤ ui(ω) for i = 1, . . . , q1 and ω ∈ Ω. Note that by setting li(ω) = li(ω)for all i and ω, the semi-continuous variables become continuous, and by setting li(ω) = 0 andli(ω) = ui(ω) = 1, the semi-continuous variables become binary. Therefore, the TSSPs with mixed0-1 programs in the second stage are special cases of TSS-SCPs.
5.1 Example of convexifiable TSS-SCP
First, we demonstrate the application of our convexification approach (discussed in Section 2) tosolve TSS-SCPs, in particular a relaxation of two-stage stochastic semi-continuous network flowproblem. In [2], Angulo et al. study the semi-continuous inflow set, defined by
S(t, h) :=
(y, z) ∈ Rn × Rn :∑i∈N
yi ≥ d
ti + zi ≥ yi i ∈ Nyi ∈ 0 ∪ [hi,∞) i ∈ Nzi ∈ 0 ∪ [li,∞) i ∈ N
,
22

where N := 1, . . . , n, and provide a tight and compact extended formulation for S(0, h), given asfollows:
Stight :=
(y, z, u) ∈ Rn × Rn × R|L| :∑i∈N\L
yimax d, hi
+∑i∈L
ui ≥ 1
zili≥ ui i ∈ Lyi
max d, hi≥ ui i ∈ L
yi ≥ 0 i ∈ Nzi ≥ yi i ∈ N
,
where L := i ∈ N : max d, hi < li. They show that S(t, h) arises as substructure in generalsemi-continuous network flow problem and semi-continuous transportation problem. It is importantto remember that the approach of adding auxiliary binary variables and constraints to reformulatea SCP can result in a large scale MIP. In [17, 18, 19, 20], attempts have been made to overcomethe difficulties with the auxiliary binary variables. Here, we consider the following TSS-SCP withsemi-continuous inflow set in the second stage:
min cTx+ Eω[Q(ω, x)]
s.t. Ax ≥ bx ∈ X
(42)
where for any scenario ω ∈ Ω,
Q(ω, x) := min gy(ω)y(ω) + gz(ω)z(ω) (43)
s.t.∑i∈N
yi(ω) ≥ d(ω) (44)
yi(ω)− zi(ω) ≤ 0 i ∈ N (45)
xi ≤ d(ω) i ∈ N (46)
yi(ω) ∈ 0 ∪ [xi,∞) i ∈ N (47)
zi(ω) ∈ 0 ∪ [li(ω),∞) i ∈ N (48)
Here, gy(ω) ∈ Rn, gz(ω) ∈ Rn, and l(ω) ∈ Rn+. Similar to TSSP, we also assume that X ⊆ Rp is ageneral set, X := x : Ax ≥ b, x ∈ X and K(ω, x) := (y(ω), z(ω)) : (44)-(48) hold such that theassumptions (ii)-(iv), defined in Section 1, hold.
23

Theorem 12. For each (x, ω) ∈ (X,Ω),
Ktight(ω, x) :=
(y(ω), z(ω), u(ω)) ∈ Rn × Rn × R|L(ω)| :
zi(ω)
li(ω)≥ ui(ω) i ∈ L(ω)
yi(ω)
d(ω)≥ ui(ω) i ∈ L(ω)
xi ≤ d(ω) i ∈ Nyi(ω) ≥ 0 i ∈ Nzi(ω) ≥ yi(ω) i ∈ N∑i∈N\L(ω)
yi(ω)
d(ω)+∑i∈L(ω)
ui(ω) ≥ 1,
where L(ω) := i ∈ N : d(ω) < li(ω), is a tight extended formulation of K(ω, x), i.e. conv(K(ω, x)) =Projy(ω),z(ω)(Ktight(ω, x)).
5.2 Linear programming equivalent for the second stage of TSS-SCPs
We re-write the semi-continuity constraints (40) as disjunctive constraints,
q1∧i=1
(0 ≤ yi(ω) ≤ li(ω)) ∨
(li(ω) ≤ yi(ω) ≤ ui(ω)
), (49)
thereby, showing that the class of TSS-DPs subsumes the TSS-SCPs. Next, in order to convexifyK(ω, x), (ω, x) ∈ Ω×X, for the TSS-SCP, we assume that q1 = 2 (for the sake of convenience) andhence, the constraints (40) or (49) in the disjunctive normal form is given by:(
0 ≤ y1(ω) ≤ l1(ω)
0 ≤ y2(ω) ≤ l2(ω)
)∨(0 ≤ y1(ω) ≤ l1(ω)
l2(ω) ≤ y2(ω) ≤ u2(ω)
)∨(
l1(ω) ≤ y1(ω) ≤ u1(ω)
0 ≤ y2(ω) ≤ l2(ω)
)∨(l1(ω) ≤ y1(ω) ≤ u1(ω)
l2(ω) ≤ y2(ω) ≤ u2(ω)
).
(50)
Corollary 7. Assuming q1 = 2, if X is a super-facial disjunctive set then a tight extended formu-lation for K(ω, x) := (y(ω) : (39)-(41) hold, (ω, x) ∈ (Ω, X), is given by
24

Ktight(ω, x) :=
∑h∈H
ξh1,1(ω)− y1(ω) = 0∑h∈H
ξh1,2(ω)− y2(ω) = 0∑h∈H
ξh2 (ω) = x
W (ω)(ξh1,1(ω), ξh1,2(ω)) ≥ r(ω)ξh0 (ω)− T (ω)ξh2 (ω), h ∈ HDh
1,1ξh1,1(ω) +Dh
1,2ξh1,2(ω) ≤ dh0(ω)ξh0 (ω), h ∈ H∑
h∈Hξh0 (ω) = 1
y(ω) ∈ Rq, ξh1,1(ω) ∈ R+, ξh1,2(ω) ∈ R+, ξ
h0 (ω) ∈ R+, h ∈ H
.
where H := 1, 2, 3, 4, Dh1,1 = [−1 1 0 0]T , Dh
1,2 = [0 0 −1 1]T for all h ∈ H, and
d10(ω) =
0
l1(ω)0
l2(ω)
, d20(ω) =
0
l1(ω)l2(ω)u2(ω)
, d30(ω) =
l1(ω)u1(ω)
0l2(ω)
, d40(ω) =
l1(ω)u1(ω)l2(ω)u2(ω)
.
6. Conclusion
We considered general two-stage stochastic programs and presented sufficient conditions underwhich the second stage programs can be convexified. This approach allowed us to relax the re-strictions, such as integrality, binary, semi-continuity, and many others, on the second stage non-continuous variables in certain situation. We generalized the results of Bansal et al. [9] for two-stagestochastic mixed integer programs. We also introduced two-stage stochastic disjunctive programs(TSS-DPs) and extended the results of Balas [3, 4], developed for deterministic disjunctive pro-grams, for TSS-DPs. More specifically, we provided linear programming equivalent for the secondstage of TSS-DPs under certain conditions and a decomposition algorithm to solve general TSS-DPs using our convexification approach. By utilizing the sequential convexification approach ofBalas [3] within L-shaped method, we developed another decomposition algorithm to solve TSS-DPs where second stage programs are facial DPs (in finite iterations), and sequentially convexifiableDPs (which include some non-convex programs such as general quadratic programs, separable non-linear programs, etc.). Furthermore, we showcased the significance of our convexification approachby solving two-stage stochastic semi-continuous programs (TSS-SCPs), in particular a TSS-SCPwith semi-continuous inflow set in the second stage. We also presented a linear programmingequivalent for the second stage of TSS-SCPs by formulating TSS-SCP as TSS-DP.
Acknowledgements. This work was supported by the grant ONR N00014-15-1-2226, which isgratefully acknowledged. We would like to thank Dr. Kuo-Ling Huang at Northwestern Universityfor sharing his insight about the integer L-shaped method. Also, we sincerely thank ProfessorMinjiao Zhang at University of Alabama and Professor Simge Kucukyavuz at Ohio State Universityfor discussing Remark 6 and mentioning about the usage of lexicographic dual simplex method intheir algorithms in [40].
25

References
[1] Shabbir Ahmed, Mohit Tawarmalani, and Nikolaos V Sahinidis. A finite branch-and-boundalgorithm for two-stage stochastic integer programs. Mathematical Programming, 100(2):355–377, 2004.
[2] Gustavo Angulo, Shabbir Ahmed, and Santanu S. Dey. Semi-continuous network flow prob-lems. Mathematical Programming, 145(1-2):565–599, April 2013.
[3] Egon Balas. Disjunctive Programming. In P.L. Hammer, E. L. Johnson, and B. H. Korte,editors, Annals of Discrete Mathematics, volume 5 of Discrete Optimization II Proceedingsof the Advanced Research Institute on Discrete Optimization and Systems Applications of theSystems Science Panel of NATO and of the Discrete Optimization Symposium, pages 3–51.Elsevier, 1979.
[4] Egon Balas. Disjunctive programming: Properties of the convex hull of feasible points. DiscreteApplied Mathematics, 89(1–3):3–44, December 1998.
[5] Egon Balas, Sebastian Ceria, and Gerard Cornuejols. A lift-and-project cutting plane algorithmfor mixed 0–1 programs. Mathematical Programming, 58(1-3):295–324, January 1993.
[6] Egon Balas and Michael Perregaard. Lift-and-project for mixed 0–1 programming: recentprogress. Discrete Applied Mathematics, 123(1–3):129–154, November 2002.
[7] Egon Balas, Joseph M. Tama, and Jørgen Tind. Sequential convexification in reverse convexand disjunctive programming. Mathematical Programming, 44(1-3):337–350, May 1989.
[8] Manish Bansal. Facets for continuous multi-mixing set and its generalizations: strong cuts formulti-module capacitated lot-sizing problem. PhD thesis, Texas A&M University, 2014.
[9] Manish Bansal, Kuo-Ling Huang, and Sanjay Mehrotra. Tight second-stage formulationsin two-stage stochastic mixed integer programs. under review, 2015. Available at http:
//www.optimization-online.org/DB_HTML/2015/08/5057.html.
[10] Manish Bansal and Kiavash Kianfar. Facets for continuous multi-mixing set with generalcoefficients and bounded integer variables. under review, 2014. Available at http://www.
optimization-online.org/DB_HTML/2014/10/4610.html.
[11] Manish Bansal and Kiavash Kianfar. n-step cycle inequalities: facets for continuous multi-mixing set and strong cuts for multi-module capacitated lot-sizing problem. MathematicalProgramming, 154(1):113–144, 2015.
[12] Manish Bansal and Kiavash Kianfar. n-step cycle inequalities: facets for continuous n-mixingset and strong cuts for multi-module capacitated lot-sizing problem. In Jon Lee and JensVygen, editors, Integer Programming and Combinatorial Optimization, Lecture Notes in Com-puter Science, 8494:102-113, June 2014.
[13] J. F. Benders. Partitioning procedures for solving mixed-variables programming problems.Numerische Mathematik, 4(1):238–252, December 1962.
[14] John R Birge and Francois V Louveaux. Introduction to Stochastic Programming. Springer,1997.
26

[15] Claus C Carøe and Jørgen Tind. A cutting-plane approach to mixed 0–1 stochastic integerprograms. European Journal of Operational Research, 101(2):306–316, 1997.
[16] Zhihao Cen. Solving multi-stage stochastic mixed integer linear programs by the dualdynamic programming approach. INRIA Report 7868, 2012. Available at http://www.
optimization-online.org/DB_FILE/2012/01/3326.pdf.
[17] I. R. De Farias, Jr., E. L. Johnson, and G. L. Nemhauser. Branch-and-cut for CombinatorialOptimization Problems Without Auxiliary Binary Variables. Knowl. Eng. Rev., 16(1):25–39,March 2001.
[18] I.R. De Farias Jr. Semi-continuous Cuts for Mixed-Integer Programming. In Daniel Bienstockand George Nemhauser, editors, Integer Programming and Combinatorial Optimization, num-ber 3064 in Lecture Notes in Computer Science, pages 163–177. Springer Berlin Heidelberg,2004.
[19] I.R. De Farias Jr. and G. L. Nemhauser. A polyhedral study of the cardinality constrainedknapsack problem. Mathematical Programming, 96(3):439–467, June 2003.
[20] I.R. De Farias Jr. and Ming Zhao. A polyhedral study of the semi-continuous knapsackproblem. Mathematical Programming, 142(1-2):169–203, June 2012.
[21] Dinakar Gade, Simge Kucukyavuz, and Suvrajeet Sen. Decomposition algorithms with para-metric gomory cuts for two-stage stochastic integer programs. Mathematical Programming,144(1-2):39–64, 2014.
[22] R. Jeroslow. A cutting-plane game for facial disjunctive programs. SIAM Journal on Controland Optimization, 18(3):264–281, May 1980.
[23] Michael Junger, Thomas M. Liebling, Denis Naddef, George L. Nemhauser, William R. Pul-leyblank, Gerhard Reinelt, Giovanni Rinaldi, and Laurence A. Wolsey. 50 Years of IntegerProgramming 1958-2008: From the Early Years to the State-of-the-Art. Springer Science &Business Media, November 2009.
[24] Kibeak Kim and Sanjay Mehrotra. A two-stage stochastic integer programming approachto integerated staffing and scheduling with application to nurse management. OperationsResearch, Accepted, 2015. Available at www.optimization-online.org/DB_FILE/2014/01/
4200.pdf.
[25] Nan Kong, Andrew J Schaefer, and Brady Hunsaker. Two-stage integer programs with stochas-tic right-hand sides: a superadditive dual approach. Mathematical Programming, 108(2-3):275–296, 2006.
[26] Gilbert Laporte and Francois V. Louveaux. The integer L-shaped method for stochastic integerprograms with complete recourse. Operations Research Letters, 13(3):133–142, April 1993.
[27] Francois V Louveaux and Rudiger Schultz. Stochastic integer programming. In A. Ruszczyn-ski and A. Shapiro, editors, Stochastic programming, volume 10 of Handbooks in OperationsResearch and Management Science, pages 213–266. Elsevier, 2003.
[28] Lewis Ntaimo. Disjunctive decomposition for two-stage stochastic mixed-binary programs withrandom recourse. Operations Research, 58(1):229–243, July 2009.
27

[29] Lewis Ntaimo. Fenchel decomposition for stochastic mixed-integer programming. Journal ofGlobal Optimization, 55(1):141–163, November 2011.
[30] Werner Romisch and Stefan Vigerske. Recent Progress in Two-stage Mixed-integer StochasticProgramming with Applications to Power Production Planning. In Panos M. Pardalos, SteffenRebennack, Mario V. F. Pereira, and Niko A. Iliadis, editors, Handbook of Power Systems I,Energy Systems, pages 177–208. Springer Berlin Heidelberg, 2010.
[31] Rudiger Schultz, Leen Stougie, and Maarten H Van Der Vlerk. Solving stochastic programswith integer recourse by enumeration: A framework using grobner basis. Mathematical Pro-gramming, 83(1-3):229–252, 1998.
[32] Suvrajeet Sen. Algorithms for stochastic mixed-integer programming models. Handbooks inOperations Research and Management Science, 12:515–558, 2005.
[33] Suvrajeet Sen and Julia L Higle. The C3 theorem and a D2 algorithm for large scale stochasticmixed-integer programming: set convexification. Mathematical Programming, 104(1):1–20,2005.
[34] Suvrajeet Sen and Hanif D Sherali. Decomposition with branch-and-cut approaches for two-stage stochastic mixed-integer programming. Mathematical Programming, 106(2):203–223,2006.
[35] H. Sherali and W. Adams. A hierarchy of relaxations between the continuous and convex hullrepresentations for zero-one programming problems. SIAM Journal on Discrete Mathematics,3(3):411–430, August 1990.
[36] Hanif D. Sherali and Warren P. Adams. Reformulation-linearization techniques for discreteoptimization problems. In Panos M. Pardalos, Ding-Zhu Du, and Ronald L. Graham, editors,Handbook of Combinatorial Optimization, pages 2849–2896. Springer New York, 2013.
[37] Hanif D Sherali and Barbara MP Fraticelli. A modification of benders’ decomposition algo-rithm for discrete subproblems: An approach for stochastic programs with integer recourse.Journal of Global Optimization, 22(1-4):319–342, 2002.
[38] Hanif D Sherali and Xiaomei Zhu. On solving discrete two-stage stochastic programs havingmixed-integer first-and second-stage variables. Mathematical Programming, 108(2-3):597–616,2006.
[39] R. Van Slyke and R. Wets. L-shaped linear programs with applications to optimal control andstochastic programming. SIAM Journal on Applied Mathematics, 17(4):638–663, July 1969.
[40] M. Zhang and S. Kucukyavuz. Finitely convergent decomposition algorithms for two-stagestochastic pure integer programs. SIAM Journal on Optimization, 24(4):1933–1951, January2014.
28