Embed Size (px)
Citation preview

Available online at www.sciencedirect.com
Automatica 39 (2003) 377–390
www.elsevier.com/locate/automatica
Optimal stochastic fault detection �lter�
Robert H. Chena, D. Lewis Mingoria, Jason L. Speyera ;∗
aMechanical and Aerospace Engineering Department, University of California, Los Angeles, CA 90095, USA
Received 12 May 1999; received in revised form 17 March 2002; accepted 11 September 2002
Abstract
A fault detection and identi�cation algorithm, called optimal stochastic fault detection �lter, is determined. The objective of the �lteris to detect a single fault, called the target fault, and block other faults, called the nuisance faults, in the presence of the process andsensor noises. The �lter is derived by maximizing the transmission from the target fault to the projected output error while minimizing thetransmission from the nuisance faults. Therefore, the residual is a3ected primarily by the target fault and minimally by the nuisance faults.The transmission from the process and sensor noises is also minimized so that the �lter is robust with respect to these disturbances. It isshown that the �lter recovers the geometric structure of the unknown input observer in the limit where the weighting on the nuisance faulttransmission goes to in�nity. Further, the asymptotic behavior of the �lter near the limit is determined by using a perturbation method.Filter designs can be obtained for both time-invariant and time-varying systems.? 2002 Elsevier Science Ltd. All rights reserved.
Keywords: Fault detection and identi�cation; Analytical redundancy; Unknown input observer; Robust fault detection �lter; Time-varying system;Perturbation theory
1. Introduction
Any system under automatic control demands a highdegree of system reliability. This requires a health moni-toring system capable of detecting any plant, actuator andsensor faults as they occur and identifying the faulty com-ponents. One approach, analytical redundancy which re-duces the need for hardware redundancy, uses the modeleddynamic relationship between system inputs and measuredsystem outputs to form a residual process which can be usedfor detecting and identifying faults. A popular approachto analytical redundancy is the unknown input observer(Chen & Speyer, 2000; Chung & Speyer, 1998; Frank,1990; Massoumnia, Verghese, & Willsky, 1989; Patton &Chen, 1992) which divides the faults into two groups: asingle target fault and possibly several nuisance faults. Thenuisance faults are placed in an invariant subspace which
� This paper was not presented at any IFAC meeting. This paper wasrecommended for publication in revised form by Associate Editor ReneBoel under the direction of Editor Tamer Basar.
∗ Corresponding author. Tel.: +1-310-206-4451; fax: +1-310-206-2302.
E-mail addresses: [email protected] (R.H. Chen),[email protected] (D. L. Mingori), [email protected](J.L. Speyer).
is unobservable to the residual. Therefore, the residual isonly sensitive to the target fault, but not to the nuisancefaults.In this paper, a design algorithm, called optimal stochas-
tic fault detection �lter, is determined for the unknown inputobserver. The �lter is derived by maximizing the transmis-sion from the target fault while minimizing the transmissionfrom the nuisance faults. The transmission is de�ned on theprojected output error by using a projector to be derived fromsolving the optimization problem. Therefore, the residual isa3ected primarily by the target fault and minimally by thenuisance faults. The transmission from the process and sen-sor noises is also minimized so that the �lter is robust withrespect to these disturbances. Since certain types of modeluncertainties can be modeled as additive noises (Patton &Chen, 1992; Douglas, Chen & Speyer, 1997) the �lter canalso be made robust to these model uncertainties.In the limit where the weighting on the nuisance fault
transmission goes to in�nity, the �lter blocks the nuisancefaults completely. It is shown that the �lter places the nui-sance faults into a minimal (C; A)-unobservability subspacefor time-invariant systems and a similar invariant subspacefor time-varying systems. Therefore, the �lter recoversthe geometric structure of the unknown input observer inthe limit and extends the unknown input observer to the
0005-1098/03/$ - see front matter ? 2002 Elsevier Science Ltd. All rights reserved.PII: S0005 -1098(02)00245 -5

378 R.H. Chen et al. / Automatica 39 (2003) 377–390
time-varying case similar to Chen and Speyer (2000) andChung and Speyer (1998). These limiting results are impor-tant in ensuring that both fault detection and identi�cationcan occur. For time-invariant systems, the nuisance faultdirections are generalized to prevent the invariant zeros ofthe nuisance faults or their mirror images from becomingpart of the eigenvalues of the �lter.The behavior of the �lter near and in the limit can be
determined by using a perturbation method. In particular,the perturbation method captures the asymptotic behavior ofthe Riccati equation that de�nes the �lter gain and general-izes the result of Kwakernaak and Sivan (1972). Note thatChen and Speyer (2000) and Chung and Speyer (1998) usethe Goh transformation in singular optimal control theory(Bell & Jacobson, 1975; Moylan & Moore, 1971) to deter-mine the �lter in the limit. Although the Goh transforma-tion cannot determine the asymptotic behavior of the �lternear the limit, it is shown that it produces a limiting Riccatiequation which is the same as that determined from the per-turbation method. Finally, the asymptotic approximation tothe ill-conditioned Riccati equation near the limit providesa robust numerical algorithm by eliminating the large coef-�cient in the Riccati equation.The problem is formulated in Section 2 and its solution
is derived in Section 3. In Section 4, the limiting propertiesof the �lter are determined. In Section 5, the limiting andasymptotic behaviors of the �lter are determined by usingthe perturbation method. In Section 6, numerical examplesare given.
2. Problem formulation
Consider a linear time-varying, uniformly observablesystem,
x = Ax + Buu+ Bww; (1a)
y = Cx + v; (1b)
where u is the control input, y is the measurement, w isthe process noise and v is the sensor noise. Following thedevelopment in (White & Speyer, 1987; Chung & Speyer,1998), any plant, actuator and sensor faults can be modeledas additive terms in the state equation (1a). Therefore, alinear system with q faults can be modeled by
x = Ax + Buu+ Bww +q∑i=1
LFi L i; (2a)
y = Cx + v: (2b)
The fault magnitudes L i are unknown and arbitrary func-tions of time that are zero when there is no fault. The faultdirections LFi are maps that are apriori known. Assume theLFi’s are monic so that L i �= 0 implies LFi L i �= 0. Since theoptimal stochastic fault detection �lter is designed to detectonly one fault and block other faults, let 1= L i be the target
fault and 2=[ L T1 · · · L Ti−1 L Ti+1 · · · L Tq ]T be the nuisance fault.Then, (2) can be rewritten as (Massoumnia et al., 1989)
x = Ax + Buu+ Bww + F1 1 + F2 2; (3a)
y = Cx + v; (3b)
where F1 = LFi and F2 = [ LF1 · · · LFi−1 LFi+1 · · · LFq].The objective of the optimal stochastic fault detection
�lter problem is to �nd a �lter gain L for the linear observer,
˙x = Ax + Buu+ L(y − Cx) (4)
and a projector H for the residual,
r = H (y − Cx) (5)
such that the residual is a3ected primarily by the target fault 1 and minimally by the nuisance fault 2, process noisew, sensor noise v and initial condition error x(t0) − x(t0).It is assumed that 1, 2, w and v are zero mean, whiteGaussian noises with power spectral densities Q1, Q2, Qwand V , respectively, and the initial state x(t0) is a randomvector with variance P0. It is also assumed that 1, 2, wand v are uncorrelated with each other and with x(t0).By using (3) and (4), the dynamic equation of the error,
e = x − x, ise = (A− LC)e + F1 1 + F2 2 + Bww − Lv: (6)
Then, the error can be written as
e(t) =�(t; t0)e(t0)
+∫ t
t0�(t; �)(F1 1 + F2 2 + Bww − Lv) d� (7)
subject to
ddt�(t; t0) = (A− LC)�(t; t0); (8)
where �(t0; t0) = I . The residual (5) can be written as r =H (Ce + v).An optimal stochastic fault detection �lter problem for-
mulated with a cost criterion based on the residual is un-usable from the statistical viewpoint since the variance ofthe residual generates a �-function due to the sensor noise.Therefore, the cost criterion will be based on the projectedoutput error HCe. In order to determine the cost criterion,de�ne
h1(t), HC∫ t
t0�(t; �)F1 1 d�; (9a)
h2(t), HC∫ t
t0�(t; �)F2 2 d�; (9b)
h3(t), HC[�(t; t0)e(t0)
+∫ t
t0�(t; �)(Bww − Lv) d�
]: (9c)

R.H. Chen et al. / Automatica 39 (2003) 377–390 379
From (7), E[h1(t)h1(t)T] represents the transmission from 1 to HCe, E[h2(t)h2(t)T] represents the transmission from 2 to HCe and E[h3(t)h3(t)T] represents the transmissionfrom w, v and e(t0) to HCe where E[ • ] is the expectationoperator. Note that e(t0) is a zero mean random vector withvariance P0 if x(t0) = E[x(t0)].The optimal stochastic fault detection �lter problem is to
�nd the �lter gain L and the projector H which minimizethe cost criterion,
J = tr{1�E[h2(t)h2(t)T] + E[h3(t)h3(t)T]
−E[h1(t)h1(t)T]}; (10)
where t is the current time and � is a positive scalar. Making� small places a large weighting on reducing the nuisancefault transmission. The trace operator forms a scalar costcriterion of the matrix output error variance. Note that thepower spectral densities Q1 and Q2 are considered as designparameters. Since no assumption is made on the fault mag-nitudes, their white noise representation is a convenience.When Q1 increases, the transmission from the target faultincreases. WhenQ2 increases, the transmission from the nui-sance fault decreases. However, the power spectral densitiesQw and V , and the variance P0 can have physical values.When Qw, V and P0 increase, the transmission from the pro-cess noise, sensor noise and initial condition error decreases,respectively.Since the e3ect of the process and sensor noises on
the residual is explicitly minimized, the �lter is robustwith respect to these disturbances. Certain types of modeluncertainties can also be modeled as additive noises(Patton & Chen, 1992; Douglas et al., 1997). Therefore,the �lter can be made robust to these model uncertainties.In Section 4, it is shown that the �lter recovers the geomet-ric structure of the unknown input observer in the limit as� → 0 and the nuisance fault is completely blocked. Whenit is not at the limit, the �lter is an approximate unknowninput observer and the nuisance fault is partially blocked.Since the approximate unknown input observer (Chung &Speyer, 1998; Chen & Speyer, 2000) has the additional de-sign freedom to determine how much of the nuisance faultis to be blocked, it is potentially more robust than the clas-sical unknown input observer (Frank, 1990; Massoumniaet al., 1989; Patton & Chen, 1992).
3. Solution
In this section, the minimization problem given by (10)is solved. By using (9), the cost criterion rewritten as
J = tr{HC
[∫ t
t0�(t; �)
(LVLT +
1�F2Q2FT2
−F1Q1FT1 + BwQwBTw)�(t; �)T d�
+�(t; t0)P0�(t; t0)T]CTH
}
is to be minimized with respect to L and H subject to (8)and that H is a projector. By adding the zero term
tr{HC
[�(t; t)P(t)�(t; t)T − �(t; t0)P(t0)�(t; t0)T
−∫ t
t0
dd�[�(t; �)P(�)�(t; �)] d�
]CTH
}
to J and using (8), the minimization problem can be rewrit-ten as
minL;H
tr[HC
∫ t
t0�(t; �)(L− PCTV−1)V (L− PCTV−1)T
�(t; �)T d�CTH + HCP(t)CTH]
(11)
subject to (8) and that H is a projector where
P = AP + PAT − PCTV−1CP +1�F2Q2FT2
−F1Q1FT1 + BwQwBTw (12)
and P(t0) = P0. By inspection, the optimal �lter gain is
L∗ = PCTV−1: (13)
Since H is a projector, it can be written as H=��T wheredim �= rank H and �T�= I . By applying (11) to (13) andsubstituting H = ��T, the minimization problem reduces to
min�tr[�TCP(t)CT�]
subject to �T�= I . By using a matrix Lagrange multiplier �to adjoin the constraint to the cost criterion, the �rst-ordernecessary condition is obtained as Athans (1968)
CP(t)CT�= ��:
Let �1¿ �2¿ · · ·¿ �m be the eigenvalues of CP(t)CT and�1; �2; : : : ; �m be the associated eigenvectors. The solutionfor the optimal � depends on the rank of H . If the rankis chosen as one, the optimal � is �m and the optimal pro-jector is
H∗ = �m�Tm: (14)
The minimal cost associated with (14) is �m. Note that thenull space of (14) is Im[�1 �2 · · · �m−1] because (14) canbe written as H∗ = I − [�1 �2 · · · �m−1] [�1 �2 · · · �m−1]T.In Sections 4 and 5, it is shown that CP(t)CT has p2 in�-
nite eigenvalues in the limit as �→ 0 and p2 large eigenval-ues near the limit when � is small where p2 =dim F2. Sincethe remaining m−p2 eigenvalues are very small comparedto the p2 large eigenvalues when � is small, the rank of H

380 R.H. Chen et al. / Automatica 39 (2003) 377–390
can be chosen as m− p2 and the optimal projector is
H∗ = [�m �m−1 · · · �p2+1]
[�m �m−1 · · · �p2+1]T: (15)
The minimal cost associated with (15) is∑m
i=p2+1 �i. Thenull space of (15) is Im[�1 �2 · · · �p2 ]. Note that both (14)and (15) are optimal projectors depending on the rank cho-sen. In Sections 4 and 5, it is shown that Im[�1 �2 · · · �p2 ]contains the nuisance fault completely in the limit and par-tially near the limit. Thus, the null space of H∗ only needsto include Im[�1 �2 · · · �p2 ] in order to block the nuisancefault. Furthermore, (15) allows at least as much of the targetfault to pass through as (14) because Im[�1 �2 · · · �p2 ] ⊆Im[�1 �2 · · · �m−1]. Therefore, (15) is a better choice than(14). In Section 4, it is shown that (15) becomes equivalentto the projector used by the unknown input observer in thelimit.
Remark 1. To implement the optimal stochastic fault de-tection �lter, the �lter gain (13) and the projector (15) areconstructed continuously with respect to time because in thecost criterion, t is the current time.
Remark 2. When Q1 = 0, the Riccati matrix P is posi-tive de�nite. When Q1 increases, P may become inde�nite(Chen, 2000). If Q1 continues to increase, P may have a�nite escape time and goes to −∞. This can be shown byformulating a linear quadratic regulator problem as the dual
problem of the optimal stochastic fault detection �lter prob-lem and using the result in Speyer (1986). This can be in-terpreted as an attempt to make the residual sensitive to thetarget fault. If Q1 is too large, the target fault may destabi-lize the �lter. Therefore, Q1 has to be chosen small enoughto avoid the �nite escape time.
4. Limiting case
In this section, the limiting properties of the optimalstochastic fault detection �lter are determined when �→ 0.It is shown that the �lter places the nuisance fault into an in-variant subspace. For time-invariant systems, this invariantsubspace is the minimal (C; A)-unobservability subspace ofF2. Therefore, the �lter becomes equivalent to the unknowninput observer in the limit. For time-varying systems, thereexists a similar invariant subspace. Therefore, the �lter ex-tends the unknown input observer to the time-varying case.
In Section 4.1, the geometric structure of the unknown in-put observer is given (Massoumnia et al., 1989; Chung& Speyer, 1998). In Section 4.2, the limiting properties ofthe �lter are determined. In Section 4.3, the nuisance faultdirections are generalized for time-invariant systems to pre-vent the invariant zeros of the nuisance fault or their mirrorimages from becoming part of the eigenvalues of the �lter.In Section 4.4, the conditions to ensure that the target faultcan be detected are discussed.
4.1. Geometric structure of unknown input observer
The unknown input observer places the nuisance faultinto the invariant subspaceT2 which is unobservable to theresidual (Massoumnia et al., 1989).T2=W2⊕V2 is calledthe minimal (C; A)-unobservability subspace or the detec-tion space of F2 (Massoumnia, 1986). W2 is the minimal(C; A)-invariant subspace of F2 given by
W2 = [f1 Af1 · · · A�1f1 f2 Af2 · · · A�2f2 · · · fp2 Afp2 · · · A�p2fp2 ]; (16)
where fi is the ith column of F2, �i is the small-est non-negative integer such that CA�ifi �= 0 andp2 = dim F2. V2 is the subspace spanned by the in-variant zero directions of (C; A; F2). Note that T2 is theunobservable subspace of (HC; A − LC) where L is theunknown input observer gain and H is a projector withker H = Im[CA�1f1 CA�2f2 · · ·CA�p2fp2 ] (Massoumniaet al., 1989). Therefore, the nuisance fault is unobservableto the residual that uses H as the projector.For time-varying systems, the minimal (C; A)-invariant
subspace of F2 is (Chung & Speyer, 1998)
W2 = [b1;0 b1;1 · · · b1; �1 b2;0 b2;1 · · · b2; �2 · · · bp2 ;0 bp2 ;1 · · · bp2 ;�p2 ]: (17)
The vectors bi; j ; j=0; 1 · · · �i, are obtained from the iterationde�ned by the Goh transformation, i.e., bi; j=Abi; j−1−bi; j−1with bi;0 = fi where fi is the ith column of F2 (Bell &Jacobson, 1975; Moylan & Moore, 1971). �i is the smallestnon-negative integer such that Cbi;�i �= 0. For time-varyingsystems, the minimal (C; A)-unobservability subspace can-not be determined because the concept of invariant zero isfor time-invariant systems only. The time-varying extensionof H is ker H = Im[Cb1; �1 Cb2; �2 · · ·Cbp2 ;�p2 ] (Chung &Speyer, 1998).
Remark 3. Eqs. (16) and (17) produce the correct invariantsubspaces only when rank CW2=p2. If rank CW2¡p2, anew basis for F2 can be obtained such that rank CW2 =p2(Chen, 2000; Chen & Speyer, 2002).
4.2. Limiting property
In this section, it is assumed that the Riccati matrix Pis positive de�nite. From Remark 2, there always exists

R.H. Chen et al. / Automatica 39 (2003) 377–390 381
positive de�nite P for some Q1. Then, P can be written as
P =n∑i=1
L�−1i L�i L�Ti ;
where L�−1i is the ith eigenvalue of P and L�i is the associatedeigenvector. In the limit as �→ 0, P goes to in�nity becauseof the term (1=�)F2Q2FT2 in (12) which indicates that someL�i’s go to zero. De�ne
(, P−1 =n∑i=1
L�i L�i L�Ti :
Then, P goes to in�nity in the limit along the null space of(. By using
− dd�(P−1) = P−1
(dd�P)P−1
and (12),
− (=(A+ AT( +((1�F2Q2FT2 − F1Q1FT1
+BwQwBTw
)( − CTV−1C; (18)
where ((t0) = P−10 . De�ne
L(, lim�→0
(:
In the limit, in order for (18) to have a solution,
L(F2 = 0: (19)
This indicates that L( has a null space which includes F2.It turns out that ker L( is the key to blocking the nuisancefault. Theorem 4 shows that ker L( is a (C; A)-invariant sub-space. Therefore, the optimal stochastic fault detection �lterplaces the nuisance fault into an invariant subspace in thelimit. Theorem 5 shows that ker L( also includes the mini-mal (C; A)-invariant subspace of F2.
Theorem 4. ker L( is a (C; A)-invariant subspace.
Proof. When only the nuisance fault occurs, the dynamicequation of the error (6) can be written as
(e = ((A− CTV−1C)e +(F2 2:
By adding (e to both sides and using (18),
dd�((e) =−
[AT +(
(1�F2Q2FT2 − F1Q1FT1
+BwQwBTw
)](e +(F2 2: (20)
In the limit, if the error initially lies in ker L(, (20) impliesthat the error will never leave ker L( because of (19). There-fore, ker L( is a (C; A)-invariant subspace.
Theorem 5. ker L( includes the minimal (C; A)-invariantsubspace of F2.
Proof. Consider the time-varying case �rst where W2 isgiven by (17). From (19), L(b1;0 = 0 and L(b1;0 =− L(b1;0.In the limit, by multiplying (18) by bT1;0 from the left andb1;0 from the right, and using L(b1;0 = 0,
1�L(F2Q2FT2 L(b1;0 = 0: (21)
By using L(b1;0 =− L(b1;0, (18) and (21),
L(b1;1 = L((Ab1;0 − b1;0) = CTV−1Cb1;0 = 0:
From L(b1;1 = 0, it can be shown similarly that L(b1;2 = 0.By iterating this procedure, L([b1;3 b1;4 · · · b1; �1 ] = 0. Itcan be shown similarly that L([bi;0 bi;1 · · · bi;�i ] = 0 fori=2; 3; : : : ; p2. Therefore, L(W2 =0. For the time-invariantcase, it can be shown similarly.
Whether ker L( includes the invariant zero directions of(C; A; F2) for time-invariant systems is considered now. Ifker L( does not include the invariant zero directions, theinvariant zeros will become part of the �lter eigenvalues(i.e., the eigenvalues of A − LC) (Massoumnia, 1986).By using the result in Kwakernaak (1976), if there existleft-half-plane invariant zeros, part of the �lter eigenvalueswill be at the invariant zeros in the limit. If there existright-half-plane invariant zeros, part of the �lter eigenval-ues will be at the mirror images of the invariant zeros inthe limit. Therefore, ker L( includes the invariant zero di-rections associated with the right-half-plane invariant zeros,but not necessarily the invariant zero directions associatedwith the left-half-plane invariant zeros. In Section 4.3, thenuisance fault directions are generalized such that ker L( in-cludes all the invariant zero directions. This generalizationprevents the invariant zeros or their mirror images frombecoming part of the �lter eigenvalues. This is importantbecause the invariant zeros or their mirror images mightbe ill-conditioned even though they are in the left-halfplane.For time-invariant systems, ker L( ⊇ W2 from Theo-
rem 5 and ker L( ⊇ V2 from the generalization of thenuisance fault directions. Thus, ker L( ⊇ T2. By usingthe result in Chung and Speyer (1998) and Chen andSpeyer (2000), ker L( ⊆ T2. Therefore, ker L( is equiva-lent to the minimal (C; A)-unobservability subspace of F2and the optimal stochastic fault detection �lter becomesequivalent to the unknown input observer in the limit. Fortime-varying systems, ker L( ⊇ W2 from Theorem 5. Byusing the result in Chen and Speyer (2000), ker L( is inthe unobservable subspace of (HC; A − LC). Therefore,the optimal stochastic fault detection �lter places the nui-sance fault into a similar invariant subspace in the limit andextends the unknown input observer to the time-varyingcase.

382 R.H. Chen et al. / Automatica 39 (2003) 377–390
Remark 6. By using the optimal �lter gain (13) and optimalprojector (15), the minimization problem (10) can be writtenas
tr{E[h2(t)h2(t)T]}+ � tr{E[h3(t)h3(t)T]}tr{E[h1(t)h1(t)T]}
= �
{1 +
∑mi=p2+1 �i
tr{E[h1(t)h1(t)T]}
}:
In the limit as �→ 0,
tr{E[h2(t)h2(t)T]}tr{E[h1(t)h1(t)T]} → 0
This implies that the nuisance fault transmission is zero inthe limit.
Remark 7. Since P goes to in�nity in the limit along ker L(,CPCT goes to in�nity along C ker L(. For time-invariantsystems, C ker L( = Im[CA�1f1 CA�2f2 · · ·CA�p2fp2 ]. Fortime-varying systems,C ker L(=Im[Cb1; �1 Cb2; �2 · · ·Cbp2 ;�p2].Then, CPCT has p2 in�nite eigenvalues in the limit andtheir associated eigenvectors span C ker L(. Therefore, theoptimal projector (15) becomes equivalent to H , which isused by the unknown input observer, in the limit.
4.3. Generalization of nuisance fault direction
The invariant zero of (C; A; F2) is de�ned as z at which[zI − A F2
C 0
]
loses rank. The invariant zero direction * is formed from apartitioning of the null space as[zI − A F2
C 0
][*
L*
]= 0: (22)
From Section 4.2, when fi, a column vector of F2,has a left-half-plane invariant zero zi, ker L( includesIm[fi Afi · · · A�ifi], but not Im *i where *i is the invariantzero direction. Also, zi becomes one of the �lter eigenval-ues in the limit. If the nuisance fault direction fi is replacedby *i, zi will not become one of the �lter eigenvalues.Furthermore, since ker L( includes Im[*i A*i · · · A�i+1*i]which is equivalent to Im[fi Afi · · · A�ifi *i] by using(22), this generalization will still block the nuisance fault.Note that ker L( includes the invariant zero direction now.If the invariant zero is in the right-half plane, this gener-alization prevents the mirror image of the invariant zerofrom becoming one of the �lter eigenvalues in the limit.If (C; A; *i) has invariant zeros, the same procedure can berepeated. If the invariant zero is associated with not justone, but several column vectors of F2, only one of thesevectors needs to be replaced by the invariant zero direction.
4.4. Condition on target fault detection
In this section, two conditions to ensure that the targetfault can be detected are assumed. First, F1 and ker L( areindependent, i.e., F1 ∩ ker L(= ∅. Otherwise, the target faultwill be diRcult or impossible to detect because it will beblocked from the residual along with the nuisance fault eventhough the �lter can still be derived by solving the minimiza-tion problem. This condition is similar to but less restrictivethan the output separability condition in Massoumnia et al.(1989) and Chung and Speyer (1998), i.e., CW1∩CW2=∅where W1 is the minimal (C; A)-invariant subspace of F1which can be obtained similarly by using (16) or (17).The output separability condition is more restrictive be-cause there is an invariant subspace formed for the targetfault.For time-invariant systems, to further ensure a nonzero
residual in steady state when the target fault occurs,(C; A; F1) cannot have invariant zeros at the origin. Whenonly the target fault occurs, the dynamic equation of theerror (6) and the residual without the projector can bewritten as
e = (A− LC)e + F1 1;r = Ce:
For a bias target fault, the residual is zero in steady state if(C; A − LC; F1) has an invariant zero at the origin (Chen,1984). Since the �lter gain L does not change the in-variant zero, (C; A − LC; F1) has an invariant zero at theorigin if and only if (C; A; F1) has an invariant zero at theorigin.
5. Perturbation analysis
In Section 4.2, the limiting properties of the Riccati ma-trices( and P were determined. In this section, expressionsfor( and P in the limit and near the limit are developed us-ing a perturbation method. The asymptotic expansions of (and P, explicitly expressed as functions of �, give an under-standing of ( and P when � is small which is the region ofinterest for the �lter design. In Chen and Speyer (2000) andChung and Speyer (1998), the Goh transformation in singu-lar optimal control theory (Bell & Jacobson, 1975; Moylan& Moore, 1971) is used to determine ( in the limit. How-ever, the Goh transformation cannot determine ( near thelimit. In Section 5.1,( is expanded around �=0. This showsexplicitly the characteristics of ( near and in the limit. Itis shown that the limiting ( determined from the perturba-tion method is the same as that determined from the Gohtransformation. In Section 5.2, the inverse of ( is derived.This shows explicitly the characteristics of P near and in thelimit. The limiting result is consistent with and generalizesthe result of Kwakernaak and Sivan (1972).

R.H. Chen et al. / Automatica 39 (2003) 377–390 383
5.1. Asymptotic expansion
In this section, ( is expanded around �= 0 as
( =∞∑i=0
�i4 (i: (23)
By substituting (23) into (18) and collecting terms of com-mon power, the equations used for �nding the (i’s in (23)are obtained in Lemma 8.
Lemma 8.
(= [u1 u2]
([0 0
0 (022
]+ �1=4
[0 0
0 (122
]
+ �1=2[(211 (212
(T212 (222
]+ �3=4
[(311 (312
(T312 (322
]+ · · ·
)
×[uT1
uT2
];
where
F2Q2FT2 = [u1 u2]
[+ 0
0 0
][uT1
uT2
]= u1+uT1
+¿ 0 and [u1 u2] is unitary. Note that Im u1=Im F2.(022,(211 and (212 must satisfy:
0 =(211+(211 − R11; (24a)
0 =(211+(212 + AT21(022 − R12; (24b)
− (022 =(022A22 + AT22(022 −(022Q22(022 − R22+(T
212+(212; (24c)
(122, (311 and (312 must satisfy:
0 =(311+(211 +(211+(311; (25a)
0 =(311+(212 +(211+(312 + AT21(122; (25b)
− (122 =(122(A22 − Q22(022) + (A22 − Q22(022)T(122
+(T312+(212 +(T
212+(312; (25c)
where[A11 A12
A21 A22
],
[uT1
uT2
]A[u1 u2]−
[uT1
uT2
][u 1 u 2]
[Q11 Q12
QT12 Q22
],
[uT1
uT2
](F1Q1FT1 − BwQwBTw) [u1 u2]
[R11 R12
RT12 R22
],
[uT1
uT2
]CTV−1C[u1 u2]
The equations for the higher-order terms can be found inChen (2000).
Proof. See Appendix A.
In Lemma 9, the solution of (24) and (25) is discussedwhen CF2 �= 0. In Lemma 10, the solution is discussed whenCF2=0 and C(AF2− F2) �= 0. The higher-order cases, suchas CF2=C(AF2−F2)=0 and C[A(AF2−F2)−d=d�(AF2−F2)] �= 0, can be considered similarly.
Lemma 9. When CF2 �= 0,
(= [u1 u2]
([0 0
0 (022
]
+ �1=2[(211 (212
(T212 (T
212(−1211(212 + L(222
]+ � · · ·
)
×[uT1
uT2
]; (26)
where
−(022
=(022(A22 − A21R−111 R12) + (A22 − A21R−111 R12)T(022
+(022(A21R−111 AT21 − Q22)(022
− (R22 − RT12R−111 R12); (27a)
(211 = R1=211 (R
1=211 +R
1=211 )
−1=2R1=211 ; (27b)
(212 = +−1(−1211(R12 − AT21(022); (27c)
L(222 = L(222(−A22 + Q22(022 + A21(−1211(212)
+ (−A22 + Q22(022 + A21(−1211(212)T L(222: (27d)
Proof. See Appendix B.
Lemma 10. When CF2 = 0 and C(AF2 − F2) �= 0,
( = [u1 u2v1 u2v2]
�3=4(311 + � · · · �1=2(2121 + �3=4 · · · �1=2(2122 + �3=4 · · ·�1=2(T
2121 + �3=4 · · · �1=4(12211 + �1=2 · · · �1=4(12212 + �1=2 · · ·
�1=2(T2122 + �
3=4 · · · �1=4(T12212 + �
1=2 · · · (02222 + �1=4 · · ·
uT1
vT1uT2
vT2uT2
; (28)

384 R.H. Chen et al. / Automatica 39 (2003) 377–390
where Im v1 = Im A21 and [v1 v2] is unitary. Only thelowest-order term of each element is kept for simplicity.The equation for each term can be found in Appendix Cand Chen (2000).
Proof. See Appendix C.
When CF2 �= 0, from Lemma 9,
( = [u1 u2]
[0 0
0 (022
][uT1
uT2
](29)
in the limit. Therefore, ker( ⊇ Im u1 = Im F2 =W2 whichis consistent with Theorem 5.Since the Riccati equation (18) can also be generated by
solving a di3erential game similar to the one in Chen andSpeyer (2000), the result of (26) gives insight into the sin-gular di3erential games in Chung and Speyer (1998) andChen and Speyer (2000). A singular di3erential game simi-lar to the one in Chen and Speyer (2000) is formulated andsolved by using the Goh transformation to derive the limit
of (18) when CF2 �= 0 which is
− S = S LA+ LATS + S[B1(FT2 CTV−1CF2)−1BT1 − F1Q1FT1
+BwQwBTw]S − CT LHTV−1 LHC; (30)
where LA = A − B1(FT2 CTV−1CF2)−1FT2 C
TV−1C, B1 =AF2 − F2 and LH = I − CF2(FT2 C
TV−1CF2)−1FT2 CTV−1.
Theorem 11 shows that the limiting Riccati matrix determi-ned from the perturbation method is the same as that deter-mined from the Goh transformation.
Theorem 11.
[u1 u2]
[0 0
0 (022
][uT1uT2
]= S:
Proof. See Appendix D.
When CF2 = 0 and C(AF2 − F2) �= 0, from Lemma 10,
( = [u1 u2v1 u2v2]
0 0 0
0 0 0
0 0 (02222
uT1vT1u
T2
vT2uT2
(31)
in the limit. By using Im v1 = Im A21 and Im u1 = Im F2,
Im[u1 u2v1] = Im[u1 u2uT2 (Au1 − u 1)]= Im[u1 (I − u1uT1 )(Au1 − u 1)]= Im[u1 Au1 − u 1] = Im[F2 AF2 − F2]
Therefore, ker( ⊇ Im [F2 AF2 − F2] =W2 which is con-sistent with Theorem 5.
5.2. Analysis
In this section, an expression for the inverse of ( is de-rived. This shows explicitly the characteristics of P near andin the limit. Only time-invariant systems are considered be-cause (022 in (29) and (02222 in (31) may not be invertiblefor time-varying systems. In Lemma 12, P is determinedwhen CF2 �= 0. In Lemma 13, P is determined when CF2=0and CAF2 �= 0. The higher-order cases, such as CF2 =CAF2 = 0 and CA2F2 �= 0, can be considered similarly.
Lemma 12. When CF2 �= 0,
P = [u1 u2]
(�−1=2
[(−1211 0
0 0
]+
[(−1211((212(−1
022(T212 −(411)(−1
211 −(−1211(212(−1
022
−(−1022(
T212(
−1211 (−1
022
]+ �1=2 · · ·
)[uT1
uT2
]: (32)
Proof. By using Lemma 9 and matrix inversion lemma,(32) is obtained.
Lemma 13. When CF2 = 0 and CAF2 �= 0,
P = [u1 u2v1 u2v2]
�−3=4P11 + �−1=2 · · · �−1=2P12 + �−1=4 · · · P13 + �1=4 · · ·�−1=2PT12 + �
−1=4 · · · �−1=4P22 + · · · P23 + �1=4 · · ·PT13 + �
1=4 · · · PT23 + �1=4 · · · P33 + �1=4 · · ·
uT1
vT1uT2
vT2uT2
; (33)
where Pij; i; j=1; : : : ; 3, can be found in Chen (2000). Onlythe lowest-order term of each element is kept for simplicity.
Proof. By using Lemma 10 and matrix inversion lemma,(33) is obtained (Chen, 2000).
In the limit, when CF2 �= 0, Lemma 12 shows that P goesto in�nity along the direction of Im F2. In the limit, whenCF2 = 0 and CAF2 �= 0, Lemma 13 shows that P goes toin�nity along the direction of Im[F2 AF2].
Remark 14. By using the result in Kwakernaak and Sivan(1972), for the time-invariant and in�nite-time case, underthe assumption that (C; A; F2) does not have right-half-planeinvariant zeros,
�P → 0 (34a)
L→ �−1=2F2Q1=22 UTV−1=2 (34b)

R.H. Chen et al. / Automatica 39 (2003) 377–390 385
as � → 0 where U is an arbitrary matrix such thatUTU = I .
To compare this result with Lemmas 12 and 13, (34a) issatis�ed by multiplying (32) and (33) by �. By substituting(32) into (13),
L→ �−1=2u1(−1211u
T1C
TV−1
as �→0. Therefore, L goes to in�nity along the direction of�−1=2Im F2 which is consistent with (34b). By substituting(33) into (13),
L→ �−1=2u1P12vT1uT2C
TV−1 + �−1=4u2v1P22vT1uT2C
TV−1
as � → 0. Therefore, L goes to in�nity essentially alongthe direction of �−1=2Im F2 which is consistent with (34b).However, L also goes to in�nity along the direction of�−1=4Im u2v1 where Im [F2 u2v1] = Im [F2 AF2]. Therefore,the perturbation method is consistent with and generalizesthe result of Kwakernaak and Sivan (1972).
6. Example
In this section, two numerical examples are used todemonstrate the performance of the optimal stochastic faultdetection �lter. In Section 6.1, the �lter is applied to atime-invariant system. In Section 6.2, the �lter is applied toa time-varying system.
10-2
100
102
104
106
-250
-200
-150
-100
-50
0γ = 10-4
Frequency (rad/s)
Sing
ular
val
ue (
db)
10-2
100
102
104
106
-250
-200
-150
-100
- 50
0γ = 10-6
Frequency (rad/s)
Sing
ular
val
ue (
db)
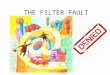
Fig. 1. Frequency response from both faults to the residual.
6.1. Example 1
Consider the time-invariant system from White andSpeyer (1987),
A=
0 3 4
1 2 3
0 2 5
; C =
[0 1 0
0 0 1
];
F1 =
0
0
1
; F2 =
5
1
1
;
where F1 is the target fault direction and F2 is the nuisancefault direction. There is no process noise. To determine theoptimal stochastic fault detection �lter, the power spectraldensities are chosen as Q1 = 1, Q2 = 1 and V = I . Thesteady-state solutions to the Riccati equation (12) when�= 10−4 and 10−6 are obtained, respectively. Fig. 1 showsthe frequency response from both faults to residual (5).The left one is obtained with �= 10−4 and the right one isobtained with � = 10−6. In each �gure, there are two solidlines representing the frequency response from the targetfault to the residuals using projectors (15) and H , respec-tively. Note that these two solid lines overlap. The dashdotline and dashed line represent the frequency response fromthe nuisance fault to the residuals using projectors (15)

386 R.H. Chen et al. / Automatica 39 (2003) 377–390
0 5 10 15 20 250
0.5
1
1.5
2
Time (sec)
Res
idua
l
0 5 10 15 20 250
0.5
1
1.5
2
Time (sec)
Res
idua
l
0 5 10 15 20 250
0.5
1
1.5
2
Time (sec)
Res
idua
l
No fault case
Target fault case
Nuisance fault case
Fig. 2. Time response of the residual.
and H , respectively. This example shows that the nuisancefault transmission can be reduced by using a smaller � whilethe target fault transmission remains large. Furthermore, theprojector (15), derived from solving the minimization prob-lem, is slightly better than H , the projector used by otherapproximate unknown input observers (Chung & Speyer,1998; Chen & Speyer, 2000), at low frequency. This sug-gests that H might not be the best choice for the approximateunknown input observer.
6.2. Example 2
Consider a time-varying system obtained by adding sometime-varying elements to the time-invariant system in pre-vious section,
A=
−cos(t) 3 + 2 sin(t) 4
1 2 3− 2 cos(t)
5 sin(t) 2 5 + 3 cos(t)
;
F2 =
5− 2 cos(t)
1
1 + sin(t)
while C and F1 remain the same. The Riccati equation (12)is solved with Q1 = 1, Q2 = 1, V = I , P0 = I and � =10−4 for t ∈ [0; 25]. Fig. 2 shows the time response of the
norm of residual (5) using projector (15) when there is nofault, a target fault and a nuisance fault, respectively. Thefaults are steps of magnitude 3 that occur at the �fth second.The sensor noise is a zero mean, white Gaussian noise withpower spectral density of 10−4I . This example shows thatthe residual is very sensitive to the target fault and much lesssensitive to the nuisance fault. Therefore, the �lter performswell for time-varying systems.
7. Conclusion
The optimal stochastic fault detection �lter is derived fromsolving a stochastic minimization problem. In the limit, the�lter recovers the geometric structure of the unknown inputobserver and the nuisance fault is completely blocked. Whenit is not at the limit, the �lter is an approximate unknown in-put observer and the nuisance fault is partially blocked. Theperturbation method used to obtain the limiting and asymp-totic behaviors of the �lter can be applied to other approx-imate unknown input observers (Chung & Speyer, 1998;Chen & Speyer, 2000) derived by solving di3erential gameswhich consider the worst-case scenarios. For time-invariantsystems, the �lter performance can be enhanced by replac-ing the nuisance fault directions with the invariant zerodirections. This notion can also be applied to other approxi-mate unknown input observers. Finally, �lter designs can beobtained for both time-invariant and time-varying systems.

R.H. Chen et al. / Automatica 39 (2003) 377–390 387
Acknowledgements
This work was sponsored by Air Force ORce of Scienti�cResearch F49620-00-1-0154, NASA Goddard Space FlightCenter NAG5-11384 and California Department of Trans-portation TO 4209.
Appendix A. Proof of Lemma 8
By substituting (23) into (18) and collecting terms ofcommon power,
�−1 : 0 =(0 LQ2(0; (A.1a)
�−3=4 : 0 =(1 LQ2(0 +(0 LQ2(1; (A.1b)
�−1=2 : 0 =(2 LQ2(0 +(1 LQ2(1 +(0 LQ2(2; (A.1c)
�−1=4 : 0 =(3 LQ2(0 +(2 LQ2(1
+(1 LQ2(2 +(0 LQ2(3; (A.1d)
�0 : −(0 =(0A+ AT(0 − CTV−1C +(4 LQ2(0
+(3 LQ2(1 +(2 LQ2(2
+(1 LQ2(3 +(0 LQ2(4 −(0 LQ1(0; (A.1e)
�1=4 : −(1 =(1A+ AT(1 +(5 LQ2(0 +(4 LQ2(1
+(3 LQ2(2 +(2 LQ2(3 +(1 LQ2(4
+(0 LQ2(5 −(1 LQ1(0 −(0 LQ1(1; (A.1f)
where LQ2 = F2Q2FT2 and LQ1 = F1Q1FT1 − BwQwBTw.From (A.1a), (0 can be written as
(0 = [u1 u2]
[0 0
0 (022
][uT1
uT2
]= u2(022uT2 ; (A.2)
where (022 is to be determined. (A.1b) is trivially satis�edbecause of (A.2). By substituting (A.2) into (A.1c), (1 canbe written as
(1 = [u1 u2]
[0 0
0 (122
][uT1
uT2
]= u2(122uT2 ; (A.3)
where (122 is to be determined. (A.1d) is trivially satis�edbecause of (A.2) and (A.3).Let
(2 = [u1 u2]
[(211 (212
(T212 (222
][uT1
uT2
]: (A.4)
By multiplying (A.1e) by [u1 u2]T from the left and [u1 u2]from the right, and substituting (A.2), (A.3) and (A.4), (24)is obtained. Let
(3 = [u1 u2]
[(311 (312
(T312 (322
][uT1
uT2
]: (A.5)
By multiplying (A.1f) by [u1 u2]T from the left and [u1 u2]from the right, and substituting (A.2), (A.3), (A.4) and(A.5), (25) is obtained. The same procedure can be usedto obtain the equations for the higher-order terms if needed(Chen, 2000; Chen, Mingori, & Speyer, 2001).
Remark 15. Since Im u1 = Im F2, u1 can be chosen asF2(FT2 F2)
−1=2. Since [u1 u2] is unitary, u2 has to satisfyuT1u2 = 0 and uT2u2 = I . De�ne U1 = I − u1uT1 . SinceuT1U1 = 0, the �rst column of u2, called u21, can be cho-sen as u21 = U1i(UT
1iU1i)−1=2 where U1i is any nonzero
column of U1. Next, de�ne U2 = I − [u1 u21][u1 u21]T.Then, the second column of u2, called u22, can be chosen asu22 = U2i(UT
2iU2i)−1=2 where U2i is any nonzero column of
U2. Other directions of u2 can be obtained similarly. u 1 andu 2 can also be obtained since u1 and u2 are explicitly writ-ten as functions of time. For time-invariant systems, [u1 u2]can also be obtained from the singular value decompositionof F2Q2FT2 and [u 1 u 2] = 0. Note that [u1 u2] is generallynot unique. However, the theorem and all lemmas in Sec-tion 5 are true for any [u1 u2] satisfying Im u1 = Im F2 and[u1 u2] is unitary.
Appendix B. Proof of Lemma 9
When CF2 �= 0, R11 is positive de�nite because Im u1 =Im F2. Then, from (24a), (27b) is obtained. Note that (211
is positive de�nite. From (24b), (27c) is obtained. By sub-stituting (27c) into (24c) and using (24a), (27a) is obtained.Therefore, the zeroth-order term (0 (A.2) can be obtainedfrom (27a). Part of the second-order term (2 (A.4) can beobtained from (27b) and (27c).From (25a), (311 = 0 because + and (211 are positive
de�nite. By substituting (311 = 0 into (25b),
(312 =−+−1(−1211A
T21(122: (B.1)
By substituting (B.1) into (25c),
(122 =(122(−A22 + Q22(022 + A21(−1211(212)
+ (−A22 + Q22(022 + A21(−1211(212)T(122: (B.2)
Since (B.2) is a homogeneous equation and the initial con-dition is zero, (122 =0. By substituting (122 =0 into (B.1),(312 = 0. Therefore, the �rst-order term (1 (A.3) and partof the third-order term(3 (A.5) are zero. Similar procedurecan be used to obtain (27d) (Chen, 2000; Chen et al., 2001).Therefore, the second-order term (2 (A.4) can be obtainedfrom (27b), (27c) and (27d). Similar procedure can be usedto obtain the equations for the higher-order terms if needed(Chen, 2000; Chen et al., 2001). It can be shown that therest of the odd terms (i.e., (3; (5; : : :) are zero. Therefore,when CF2 �= 0, the expansion of ( (23) only needs to bein the order of �1=2.

388 R.H. Chen et al. / Automatica 39 (2003) 377–390
Remark 16. Since (211 and (212 are obtained from alge-braic equations (27b) and (27c), the initial condition((t0)=P−10 cannot be satis�ed in general. This is because the di-mension of the Riccati equation (18) is reduced in the limitas �→ 0 which leads to the occurrence of a boundary layer(Nayfeh, 1973). The expansion of( (26) is called the outerexpansion and valid everywhere except near �=0. The innerexpansion, which is valid only near � = 0, can be obtainedby using di3erent fast time scales (Nayfeh, 1973). Since theinner expansion is only valid for a very short period of time,only the boundary layer is obtained and used as the initialcondition of the outer expansion (Chen et al., 2001). Notethat in the limit, the fast time scale goes to in�nity and thereis an instant jump at the initial time which is consistent withthe Goh transformation (Chen & Speyer, 2000; Chung &Speyer, 1998).
Appendix C. Proof of Lemma 10
When CF2=0, R11=0 and R12=0 because Im u1=Im F2.From (24a), (211 = 0 because + is positive de�nite. Bysubstituting (211 = 0 into (24b), (022A21 = 0. Then, (022
can be written as
(022 = [v1 v2]
[0 0
0 (02222
][vT1
vT2
]: (C.1)
Let
(212 = [(2121 (2122]
[vT1
vT2
]: (C.2)
By multiplying (24c) by [v1 v2]T from the left and [v1 v2]from the right, and substituting (C.1) and (C.2),
0 =(T2121+(2121 − R2211; (C.3a)
0 =(T2121+(2122 + AT2221(02222 − R2212; (C.3b)
− (02222 =(02222A2222 + AT2222(02222 −(02222Q2222(02222
−R2222 +(T2122+(2122; (C.3c)
where[A2211 A2212
A2221 A2222
],
[vT1
vT2
]A22[v1 v2]−
[vT1
vT2
][v1 v2];
[Q2211 Q2212
QT2212 Q2222
],
[vT1
vT2
]Q22[v1 v2];
[R2211 R2212
RT2212 R2222
],
[vT1
vT2
]R22[v1 v2]:
Since Im u1 = Im F2, Cu1 = 0 and C(Au1 − u 1) �= 0.Since R2211 = vT1u
T2C
TV−1Cu2v1 and Im v1 = Im A21, R2211is positive de�nite because
AT21uT2C
TV−1Cu2A21
= (uT1ATu2 − uT1u2)uT2CTV−1Cu2(uT2Au1 − uT2 u 1)
= (uT1AT − uT1)(I − u1uT1 )CTV−1C(I − u1uT1 )(Au1 − u 1)
= (Au1 − u 1)TCTV−1C(Au1 − u 1)¿ 0
Then, (2121 is invertible. From (C.3b),
(2122 = +−1(−T2121(R2212 − AT2221(02222): (C.4)
By substituting (C.4) into (C.3c) and using (C.3a),
− (02222 =(02222(A2222 − A2221R−12211R2212)
+ (A2222 − A2221R−12211R2212)T(02222
+(02222(A2221R−12211AT2221 − Q2222)(02222
−(R2222 − RT2212R−12211R2212): (C.5)
Therefore, the zeroth-order term (0 (A.2) can be obtainedfrom (C.1) and (C.5). Similar procedure can be used toobtain the equations for other terms (Chen, 2000; Chenet al., 2001). Therefore, ( can be expressed as
( = [u1 u2]
�3=4(311 + � · · · �1=2(212 + �3=4 · · ·
�1=2(T212 + �
3=4 · · · [v1 v2]
�1=4(12211 + �1=2 · · · �1=4(12212 + �1=2 · · ·�1=4(T
12212 + �1=2 · · · (02222 + �1=4 · · ·
[vT1
vT2
][uT1
uT2
]
which can be written as (28).
Appendix D. Proof of Theorem 11
Since SF2=0 (Chen & Speyer, 2000), S can be written as
S = [u1 u2]
[0 0
0 LS
][uT1
uT2
]:
By multiplying (30) by [u1 u2]T from the left and[u1 u2] from the right, subtracting [u1 u2]TS[u 1 u 2]and [u 1 u 2]TS[u1 u2] from both sides, and using [u1 u2][u1 u2]T = I ,[0 0
0 − LS
]= S1 + ST1 + S2 − S0; (D.1)

R.H. Chen et al. / Automatica 39 (2003) 377–390 389
where
S1 =
[0 0
0 LS
]([A11 A12
A21 A22
]−[uT1
uT2
]
B1(FT2 CTV−1CF2)−1FT2 C
TV−1C[u1 u2]
); (D.2a)
S2 =
[0 0
0 LS
]([uT1
uT2
]B1(FT2 C
TV−1CF2)−1BT1 [u1 u2]
−[Q11 Q12
QT12 Q22
])[0 0
0 LS
]; (D.2b)
S0 =
[R11 R12
RT12 R22
]−[R11 R12
RT12 R22
][uT1
uT2
]
F2(FT2 CTV−1CF2)−1FT2
[u1 u2]
[R11 R12
RT12 R22
]: (D.2c)
Since Im u1 = Im F2, let u1 = F21 where 1 satis�es1TFT2 F21 = I because u
T1u1 = I . By using u1 = F21 and
1−1 = 1TFT2 F2,
uT1F2(FT2 C
TV−1CF2)−1FT2 u1 = [1T(FT2 C
TV−1CF2)1]−1
= R−111 : (D.3)
By using uT2F2 = 0 and (D.3),
S0 =
[0 0
0 R22 − RT12R−111 R12
]: (D.4)
Since u 1 = F21+F21, uT2 u 1 = uT2 F21 because u
T2F2 =0.
By using B1 = AF2 − F2, u1 = F21 and uT2 F21= uT2 u 1,uT2B11= A21: (D.5)
By using (D.3), u1 = F21, 1−1 = 1TFT2 F2 and (D.5),
uT2B1(FT2 C
TV−1CF2)−1BT1u2 = A21R−111 A
T21: (D.6)
By using (D.6),
S2 =
[0 0
0 LS(A21R−111 AT21 − Q22) LS
]: (D.7)
By using u1 = F21 and (D.5),
uT2B1(FT2 C
TV−1CF2)−1FT2 CTV−1Cu1 = A21: (D.8)
By using (D.3), u1 = F21, 1−1 = 1TFT2 F2 and (D.5),
uT2B1(FT2 C
TV−1CF2)−1FT2 CTV−1Cu2 = A21R−111 R12: (D.9)
By using (D.8) and (D.9),
S1 =
[0 0
0 LS(A22 − A21R−111 R12)
]: (D.10)
By substituting (D.10), (D.7) and (D.4) into (D.1),
− LS = LS(A22 − A21R−111 R12) + (A22 − A21R−111 R12)T LS
+ LS(A21R−111 AT21 − Q22) LS
− (R22 − RT12R−111 R12): (D.11)
By comparing (D.11) with (27a), LS =(022.
References
Athans, M. (1968). The matrix minimum principle. Information andControl, 11(5/6), 592–606.
Bell, D. J., & Jacobson, D. H. (1975). Singular optimal control problems.New York: Academic Press.
Chen, C. -T. (1984). Linear system theory and design. New York: Holt,Rinehart, and Winston.
Chen, R. H., 2000. Fault detection =lters for robust analyticalredundancy. Ph.D. thesis, University of California at Los Angeles.
Chen, R. H., Mingori, D. L., & Speyer, J. L. (2001). Perturbationanalysis for Ricatti equation. In Proceedings of the American controlconference (pp. 3463–3468).
Chen, R. H., & Speyer, J. L. (2000). A generalized least-squares faultdetection �lter. International Journal of Adaptive Control and SignalProcessing—Special Issue: Fault Detection and Isolation, 14(7),747–757.
Chen, R. H., & Speyer, J. L. (2002). Robust multiple-fault detection �lter.International Journal of Robust and Nonlinear Control—SpecialIssue: Fault Detection and Isolation, 12(8), 675–696.
Chung, W. H., & Speyer, J. L. (1998). A game theoretic faultdetection �lter. IEEE Transactions on Automatic Control, AC-43(2),143–161.
Douglas, R. K., Chen, R. H., & Speyer, J. L. (1997). Model inputreduction. In Proceedings of the American Control Conference (pp.3882–3886).
Frank, P. M. (1990). Fault diagnosis in dynamic systems using analyticaland knowledge-based redundancy—a survey and some new results.Automatica, 26(3), 459–474.
Kwakernaak, H. (1976). Asymptotic root loci of multivariable linearoptimal regulators. IEEE Transactions on Automatic Control,AC-21(3), 378–382.
Kwakernaak, H., & Sivan, R. (1972). The maximally achievableaccuracy of linear optimal regulators and linear optimal �lters. IEEETransactions on Automatic Control, AC-17(1), 79–86.
Massoumnia, M. A. (1986). A geometric approach to the synthesis offailure detection �lters. IEEE Transactions on Automatic Control,AC-31(9), 839–846.
Massoumnia, M. A., Verghese, G. C., & Willsky, A. S. (1989).Failure detection and identi�cation. IEEE Transactions on AutomaticControl, AC-34(3), 316–321.
Moylan, P. J., & Moore, J. B. (1971). Generalizations of singular optimalcontrol theory. Automatica, 7(5), 591–598.
Nayfeh, A. H. (1973). Perturbation methods. New York:Wiley-Interscience.
Patton, R. J., & Chen, J. (1992). Robust fault detection of jet engine sensorsystems using eigenstructure assignment. AIAA Journal of Guidance,Control, and Dynamics, 15(6), 1491–1497.
Speyer, J. L. (1986). Linear-quadratic control problem. In C. T. Leondes(Ed.), Control and dynamic systems, Vol. 13 (pp. 241–293). NewYork: Academic Press.
White, J. E., & Speyer, J. L. (1987). Detection �lter design: Spectraltheory and algorithms. IEEE Transactions on Automatic Control,AC-32(7), 593–603.

390 R.H. Chen et al. / Automatica 39 (2003) 377–390
Robert H. Chen received the B.S. degreein power mechanical engineering from Na-tional Tsing Hua University, Taiwan, in1992 and the Ph.D. degree in mechanicalengineering from the University of Califor-nia, Los Angeles, in 2000.He is currently an assistant research en-gineer in the Mechanical and AerospaceEngineering Department at the Universityof California, Los Angeles. His researchinterests include fault detection, identi�ca-tion, and reconstruction with application to
aircraft, satellites, and ground vehicles.
D. Lewis Mingori received the B.S. degreefrom the University of California, Berke-ley in 1960, the MS degree from UCLA in1962, and the Ph.D. degree from StanfordUniversity in 1966 (Aeronautical and As-tronautical Sciences). From 1966–1968 hewas a Member of the Technical Sta3 of TheAerospace Corporation, and since 1968 hehas been a faculty member in the Mechani-cal and Aerospace Engineering Departmentat UCLA. His teaching is in the areas ofDynamics and Control and his research
interests include Spacecraft Attitude Control, Spinning and Dual SpinSpacecraft Dynamics, Spinning Rocket Dynamics, Automated Road Ve-hicles, Fault Detection and Identi�cation, and Modeling, Identi�cationand Vibration Control of Flexible Structures. Dr. Mingori is a Fellow ofthe American Institute of Aeronautics and Astronautics.
Jason L. Speyer received the S.B. de-gree in aeronautics and astronautics fromthe Massachusetts Institute of Technology,Cambridge, in 1960 and the Ph.D. degreein applied mathematics from Harvard Uni-versity, Cambridge, MA, in 1968.His industrial experience includes researchat Boeing, Raytheon, Analytical MechanicsAssociated, and the Charles Stark DraperLaboratory. He was the Harry H. PowerProfessor in Aerospace Engineering atthe University of Texas, Austin, and is
currently a Professor in the Mechanical and Aerospace Engineering De-partment at the University of California, Los Angeles. He spent a re-search leave as a Lady Davis Visiting Professor at the Technion—IsraelInstitute of Technology, Haifa, Israel, in 1983 and was the 1990 JeromeC. Hunsaker Visiting Professor of Aeronautics and Astronautics at theMassachusetts Institute of Technology.Dr. Speyer has twice been an elected member of the Board of Governorsof the IEEE Control Systems Society. He has served as an Associate Ed-itor of the IEEE Transactions on Automatic Control and as Chairman ofthe Technical Committee on Aerospace Control. He is a Fellow of theAmerican Institute of Aeronautics and Astronautics and the Institute ofElectrical and Electronic Engineers. From October 1987 to October 1991and from October 1997 to October 2001, he has served as a member ofthe USAF Scienti�c Advisory Board. He was awarded Mechanics andControl of Flight Award and Dryden Lectureship in Research from theAmerican Institute of Aeronautics and Astronautics in 1985 and 1995,respectively. He was awarded Air Force Exceptional Civilian Decorationin 1991 and 2001 and the IEEE Third Millennium Medal in 2000.




![Particle Filter for Fault Diagnosis and Robust Navigation ... · fault tolerant architecture is a natural choice for system design [1]. Towards realization of a fault tolerant system,](https://img.pdfslide.net/doc/110x75/5e87cf6734ff7a3ee2783aee/particle-filter-for-fault-diagnosis-and-robust-navigation-fault-tolerant-architecture.jpg)