-
OVERALL VISCOELASTIC RESPONSE OF
RANDOM FIBROUS COMPOSITES WITH
STATISTICALLY UNIFORM
DISTRIBUTION OF REINFORCEMENTS
M. Šejnoha a,1 and J. Zeman a
aCzech Technical University, Faculty of Civil
EngineeringDepartment of Structural Mechanics
Thákurova 7, 166 29 Prague 6
Abstract
An accurate representation of time dependent response of
polymeric composite
systems with disordered microstructure is developed within the
framework of clas-
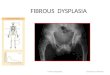
sical homogenization methods. A graphite fiber tow impregnated
by an epoxy resin,
Fig. 1(a), is just an example of such systems. The investigation
is focused on mod-
eling issues pertinent to random, non-periodic, material
systems, while the loading
conditions are left to those promoting the linear viscoelastic
deformation only. Two
different approaches are examined. The first approach assumes a
well defined ge-
ometry of the fiber arrangement and specific boundary
conditions. In the modeling
framework, the complicated real microstructure is replaced by a
material represen-
tative volume element consisting of a small number of particles,
which statistically
resembles the real microstructure. Periodic distribution of such
unit cells is consid-
ered and the finite element method is called to carry out the
numerical computation.
The theoretical basis for the second approach are the
Hashin-Shtrikman variational
principles. The random character of the fiber distribution is
incorporated directly
into the variational formulation employing certain statistical
descriptors. At the
Preprint submitted to Elsevier Preprint 6 August 2001
-
present time the applications are limited to microstructures,
which are sufficiently
described by the two-point probability function. The presented
results support ap-
plicability of both methods to the description of viscoelastic
behavior of the selected
material system.
Key words: Unit cell, variational principle, Maxwell chain
model, eigenstrain
(a) (b)
Fig. 1. Geometry of fiber bundle and distribution of fibers
within transverse plane section.
1 Introduction
Reliability, ease of processibility and relatively low cost
offered by the polymer matrix com-
posites contribute to their continuous rise in both mechanical
and civil engineering industry.
An adequate description of the deformation behavior of such
systems is therefore in order.
The time dependent response of polymers when subject to
sustained loading is well known
and has been under thorough study since their introduction.
Inventory of contributions to
analysis of polymer systems includes [?,?, among others]. The
deformation behavior of poly-
mers is generally quite complex ranging from viscoelastic regime
at very low stresses, over the
non-linear viscoelastic deformation at moderate stresses up to
the yield behavior at hight
1 Corresponding author.
2
-
stresses. Such deformation mechanisms are also found in the
polymer matrix composites.
Examples include polymer matrix systems reinforced by aligned
fibers, whiskers or fabrics
typically supplied in form of laminated plates or woven tubes.
Constitutive modeling of such
systems usually assumes linearly elastic response of
reinforcements while the matrix phase
may undergo an inelastic or time dependent deformation. e.g.,
[?,?].
Apart from proper selection of the constitutive model, the
overall response of composite
structures is highly influenced by their microstructure
configuration. Estimates of the overall
response of composite materials are often derived on the basis
of periodic microstructures,
but such are difficult to realize in practice. Instead, a highly
disordered microstructures arise
in most practical applications, see Fig. 1(b). Therefore,
recognizing a random nature of such
systems is a key step to a successful modeling of composite
materials and structures. This
viewpoint is also adopted in the present contribution. In
particular, we focus on an accurate
description of microstructure configuration and its effect on
the overall response of polymer
composites under sustain loading, while admitting only such
loading conditions which result
in a liner viscoelastic response of the matrix phase. A detailed
description of more complex
material behavior of polymer systems is in progress and will be
presented in a forthcoming
paper.
Two classical computational techniques in the analysis of
composites are reviewed and ap-
plied to modeling of random composites. The first approach hinge
on the existence of a
periodic unit cell having the same statistics up to two-point
correlations as the real mi-
crostructure. A thorough study on this subject can be found in
[?]. Note that regardless of
their origin, the present formulation is applicable to any
composite systems which can be
represented by periodic unit cells. The second approach builds
upon the well known Hashin-
Shtrikman (H-S) variational principles [?]. The interested
reader may also consult the work
of [?,?], for generalization of these principles to treat random
composites. Evaluation of ef-
fective thermoelastic properties of fiber tow assuming
statistically uniform distribution of
3
-
fibers is presented in [?]. A strong attention is paid to an
efficient evaluation of certain
microstructure dependent matrices, given in terms of the
two-point probability functions,
which arise in the solution procedure based on the H-S
principles. The most important as-
pects of both procedures are revisited here, but extended to
account for the distribution of
local eigenstrain or eigenstress fields, which enter the
constitutive equations to accommodate
creep or relaxation effects.
The present article is organized as follows. Section 2 outlines
formulation of incremental
form of local constitutive equations describing the linear
viscoelastic response on the basis of
generalized Maxwell chain model. Their introduction into a
specific form of homogenization
methods treating spatially periodic microstructures is addressed
in Section 3. An alternate
procedure to predict the time dependent response of random
composites via the H-S princi-
ples is presented in Section 4. The results for the selected
material system are summarized
in Section 5.
2 Local constitutive equations
The present section provides a brief overview of local
constitutive equations describing the
viscoelastic response of homogeneous and isotropic materials.
Such equations can be formu-
lated either in the integral form, or in the differential form.
The differential form, that is more
convenient for numerical implementation, can be derived by
converting the integral equations
into a rate-type form and by subsequent integration under
certain simplifying assumptions.
Nevertheless, both forms of constitutive equations requires, in
general, an introduction of
either creep J(t, τ) (compliance) or relaxation R(t, τ)
function. Recall that the compliance
function of a linear viscoelastic material represents the strain
at time t due to a unit stress
applied at time τ and kept constant, while the relaxation
function represents the stress at
time t due to a unit strain applied at time τ and held constant.
To facilitate the numerical
solution these functions are typically approximated by the
degenerate (Dirichlet) kernels in
4
-
the form
J(t, τ) =M∑µ=1
1
Dµ(τ){1− exp [yµ(τ)− yµ(t)]} ,
R(t, τ) =M∑µ=1
Eµ(τ) exp [yµ(τ)− yµ(t)], (1)
where yµ(t) = (t/Θµ). Retardation times Θµ must satisfy certain
rules necessary for the
success of calculation [?]. Functions Dµ and Eµ are usually
obtained by fitting the creep
or relaxation functions via Eqs. (1) using the method of least
squares. Also note that rep-
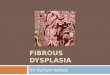
resentation (1) corresponds to the well known Maxwell and Kelvin
chain models displayed
in Fig. 2. Both rheological models are equivalent and can be
used to deliver the searched
constitutive equations. As an example, consider the Maxwell
chain model and write the local
stress in the form
σ(x) =M∑µ=1
σµ(x), (2)
where σµ, called hidden stress, represents the stress in the µth
Maxwell unit, which satisfies
the differential constitutive equation
σ̇µ(x) + ẏµσµ(x) = Eµ(x)L̂(x)(�̇(x)− �̇0(x)), ẏµ(t) =Eµ(t)
ηµ(t). (3)
Lµ(x, t) = Eµ(x, t)L̂(x) is the instantaneous stiffness matrix
of a linear elastic isotropic
material at the material point x. The initial strain vector ∆�0i
may represent many different
physical phenomena including thermal strains, shrinkage,
swelling, plastic strains, etc. A
simple finite difference based integration scheme can be devised
to integrate Eq. (3). In
doing so, first subdivide the time axis into intervals of length
∆ti. Next, suppose that at
the beginning of the ith interval 〈ti−1, ti〉, the stress vector
σµ(x, ti−1), µ = 1, 2, . . . ,M , is
known. Further assume that functions Eµ(x, τ) = Eµ(x, ti−∆ti/2)
remain constant within a
given time interval. Then, integrating Eq. (3) with respect to
time over ∆t and using Eq. (2)
5
-
. . . . . .
1 2 3 M
σ
σ
η
µE
ηMµ
8
µEηµ
. . .
.
M
2
1
σ
σ
η 01
(a) (b)
Fig. 2. Rheological models: (a) Maxwell chain, (b) Kelvin
chain.
leads to the following incremental form of the local
constitutive equation [?]
∆σi(x) = Li(x) (∆�i(x)−∆µi(x)) , (4)
where the current increment of local eigenstrain reads
∆µi(x) = ∆�0i (x) + ∆�̂i(x). (5)
The vector ∆�̂i(x) in Eq. (5) then represents the time dependent
deformation and ∆�0i (x) is
the increment of initial strain. When admitting only thermal and
creep effects their respective
forms are
∆�0i (x) = m(x)∆θi, ∆�̂i(x) =
[L̂(x)
]−1Êi(x, t)
M∑µ=1
(1− e−∆yµ
)σµ(x, ti−1), (6)
where m(x) lists the coefficients of thermal expansion. The
stiffness Êi for the ith interval
is determined by
Êi(x, t) =M∑µ=1
Eµ(x, ti −∆ti/2)(1− e−∆yµ
)/∆yµ. (7)
6
-
0 10 20 30 40 50
t-τ [days]
0
500
1000
1500
2000
R(t
-τ) [
MP
a]
R - Findley’s relation
R - Dirichlet series expansion
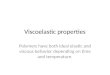
Fig. 3. Relaxation function.
Finally recall that the stress σµ(x, ti) at the end of the ith
interval depends solely on the
stress σµ(x, ti−1) found at the beginning of the ith interval
such that
σµ(x, ti) = σµ(x, ti −∆t)e−∆yµ + Eµ(x, ti −∆ti/2)λµL̂(x)(∆�i(x,
ti)−∆�0i (x, ti)
).(8)
Providing the material is age dependent, the coefficients Eµ
should be determined at every
time step. In the present formulation, however, the time
dependent material properties of
the epoxy matrix derived experimentally from a set of well cured
specimens are assumed,
[?], so that the material aging can be neglected. If this is the
case a simple power law like
formula for the unit creep rate
J(t, τ) = a+ b(t− τ)n, R(t, τ) = 1a+ b(t− τ)n
, (9)
can be employed to fit the experimental data. For the selected
epoxy resin the model data are
a = 0.04744, b = 0.002142, n = 0.3526 with (t− τ) given in
minutes, [?]. The corresponding
relaxation function R(t, τ) appears in Fig. 3. Ten elements of
the Dirichlet series expansion
Eq. (1) uniformly distributed in log(t − τ) over the period of
hundred days were assumed.
The fit of the relaxation function Eq. (92) by Eq. (12) is
plotted in Fig. 3.
7
-
Eqs. (4) – (8) will now be used within the framework of
individual solution techniques to
introduce the time dependent behavior of the polymer systems
into composites. We begin
with simulations of viscoelastic processes in random composites
by introducing a statistically
equivalent unit cell in Section 3 and then by following an
alternate approach based on H-S
principles in Section 4.
3 Description of viscoelastic behavior via periodic fields
As already outlined in the introductory section, most of
heterogeneous materials and compos-
ite systems in particular exhibit random distribution of
reinforcing constituents. Analyzing
large samples of such materials, however, is computationally
very expensive and cumbersome.
Although exceptions exist with reference to elastic problems,
such an approach inevitably
becomes infeasible when allowing inelastic or time dependent
deformations. A viable substi-
tute, which yet provides notion of the local nature of variables
of interest such as stresses
and strains, relies on existence of the representative volume
element (RVE) defined in terms
of a periodic unit cell with a certain number of particles,
which possesses similar statisti-
cal properties as the original material, and therefore it can be
considered as its reasonable
approximation. This task requires formulation of an objective
function, which relates the
material’s statistics of the real microstructure and the
corresponding unit cell. Its minimum
then provides locations of individual reinforcements together
with an optimal ratio of the
unit cell dimensions. Solution systems based on evolution
strategies were found appealing
in the search for optimal unit cells. A thorough discussion on
this subject with reference
to evaluation of the overall thermoelastic properties is given
in [?]. The interested reader
may also consult the work by [?] for a comprehensive overview of
various useful algorithms
based on evolution strategies applied to this and similar
problems commonly encountered in
engineering practice.
The section now proceeds by considering an optimal unit cell
similar to one of Fig. 4 that
8
-
(a) (b)
Fig. 4. Periodic unit cells: (a) 5-fibers PUC, (b) 10-fibers
PUC.
statistically resembles the real microstructure, Fig. 1(b).
Further suppose that the prescribed
loading conditions produce a uniform distribution of macroscopic
strain E or stress Σ fields.
In either case, an increment of the local displacement field
u(x) admits the following decom-
position
∆u(x) = ∆E x + ∆u∗(x), (10)
where ∆u∗(x) represents a fluctuation of the local displacement
due to the presence of
heterogeneities and is considered being periodic, [?,?, and
references therein]. The local
strain increment then assumes the form
∆�(x) = ∆E + ∆�∗(x), (11)
where the fluctuation part ∆�∗(x) must vanish upon volume
averaging. This requirement is
fulfilled for the present boundary conditions since
〈∆�∗ij(x)
〉=
1
Ω
∫Ω
∆�∗ij(x) dΩ =1
2Ω
∫∂Ω
(∆u∗i (x)nj + ∆u
∗j(x)ni
)d(∂Ω) = 0, (12)
due to periodicity of ∆u∗(x) (the same displacement on opposite
sides of the unit cell). In
9
-
Eq. (12) Ω and ∂Ω represent the volume and the boundary of the
unit cell, respectively.
The goal now becomes the evaluation of local fields within the
unit cell and then their aver-
aging to arrive at the desired macroscopic response. To proceed,
we first write the principle
of virtual work (Hill’s lemma) in the form
〈δ�T∆σ
〉= δET∆Σ. (13)
Next, substituting Eq. (4) into the above expression yields
δET〈Li(x)
(∆E + ∆�∗(x)−∆�0i (x)−∆�̂i(x)
)〉+〈δ�∗(x)TLi(x)
(∆E + ∆�∗(x)−∆�0i (x)−∆�̂i(x)
)〉= δETΣ, (14)
where subscript i now links Eq. (14) with the current time
increment. Since δE and δ�∗(x)
are independent, the preceding equation can be split into two
equalities
δET(〈Li(x)〉∆E +
〈Li(x)
(∆�∗i (x)−∆�0i (x)−∆�̂i(x)
)〉)− δET∆Σ = 0
(15)〈δ(�∗)T(x)Li(x)
〉∆E +
〈δ(�∗)T(x)Li(x)
(∆�∗i (x)−∆�0i (x)−∆�̂i(x)
)〉= 0.
A standard finite element approach is usually adopted to solve
the above system of equations.
We proceed by introducing a set of C0 continuous shape functions
such that ∆u(x) =
N(x)∆r; ∆r stores the components of the increment of nodal
displacements. The vector of
local strains then receives, after employing the geometrical
equations, its familiar form
∆�∗(x) = B(x)∆r, δ�∗T = (δr)TBT(x). (16)
Inserting these formulae in Eqs. (15) provides the following
incremental form of algebraic
equations K11 K12K21 K22
i
∆E∆ri
=
∆Σ + ∆F0
∆f 0
i
. (17)
10
-
Individual matrices listed in Eq. (17) are written as
K11i =1
Ω
∫Ω
Li(x) dΩ,
K12i = KT21i =
1
Ω
∫Ω
Li(x)B(x) dΩ, (18)
K22i =1
Ω
∫Ω
BT(x)Li(x)B(x) dΩ,
and components of the right-hand side vector are
∆F 0i =1
Ω
∫Ω
Li(x)(∆�0i (x) + ∆�̂i(x)
)dΩ,
∆f 0i =1
Ω
∫Ω
BT(x)Li(x)(∆�0i (x) + ∆�̂i(x)
)dΩ. (19)
Finally, eliminating the fluctuating displacements vector ∆ri
from Eq. (17) readily provides
the incremental form of the macroscopic constitutive law
∆Σi = Di∆Ei + ∆Λ0i , (20)
where
Di =(K11 −K12K−122 KT12
)i, ∆Λ0i = −∆f 0i +
(K12K
−122 ∆f
0)i. (21)
When prescribing the overall strain only the system of equations
(17) reduces to
(K22)i∆ri = −(K21)i∆Ei + ∆f 0i . (22)
Eqs. (17) and (22) can now be used to run either the creep or
relaxation experiments. The
results are discussed in Section 5.
11
-
4 Overall viscoelastic response via Hashin-Shtrikman
principles
Suppose that no information about the nature of local fields is
needed, but instead a notion
about the phase volume averages of field variables is sufficient
in simulating the behavior
of composite materials. Then, the sometimes time consuming
implementation of finite ele-
ments in conjunction with the unit cell analysis can be replaced
by more simple averaging
techniques. Such an approach is examined in this section.
To introduce the subject consider an ergodic heterogeneous
material system with statisti-
cally homogeneous distribution of reinforcements. Here, we limit
our attention to two-phase
fibrous composites with fibers aligned along the x3 direction.
The morphology of such a sys-
tem can be conveniently described by the two-point probability
function Srs. As suggested
by Drugan & Willis [?] this function, when combined with the
Hashin-Shtrikman varia-
tional principles provides sufficient information for deriving
bounds on effective properties
of random composites. The material system under present study
has been examined in very
details in [?] with reference to evaluation of effective
thermoelastic properties of statistically
homogeneous materials using both the primary and dual
variational principles of Hashin
and Shtrikman. The remainder of this section outlines
implementation of this approach to
solve the viscoelastic problem. It is organized as follows: a
review of basic statistical descrip-
tors (Section 4.1), viscoelastic formulation based on the
primary H-S principle to run the
relaxation tests (Section 4.2) and viscoelastic formulation
based on the dual H-S principle
to study the creep behavior (Section 4.3).
4.1 Review of basic statistical descriptors
To reflect a random character of heterogeneous media it is
convenient to introduce the
concept of an ensemble – the collection of a large number of
systems which are different
in their microscopical details but identical in their
macroscopic details. In the context of
12
-
quantification of the microstructure morphology, an ensemble
represents the collection of
material micrographs taken from different samples of the
material. To describe a random
microstructure we introduce a characteristic function χr(x, α),
which is equal to one when
point x lies in the phase r within the sample α and equal to
zero otherwise
χr(x, α) =
1 x ∈ Dr(α)0 otherwise. (23)
The symbol Dr(α) denotes here the domain occupied by r-th phase
in the sample α. For
a two-phase fibrous composite, r = f,m, characteristic functions
χf (x, α) and χm(x, α) are
related by
χm(x, α) + χf (x, α) = 1. (24)
With the aid of function χr, the general n-point probability
function Sr1,...,rn is given by [?].
Sr1,...,rn(x1, . . . ,xn) = χr1(x1, α) · · ·χrn(xn, α). (25)
Thus, Sr1,...,rn gives the probability of finding n points x1, .
. . ,xn randomly thrown into the
media located in the phases r1, . . . , rn. We limit our
attention to functions of the order of
one and two.
Analysis of random composites usually relies on various
statistical assumptions such as er-
godic hypothesis, spatial homogeneity or isotropy, which may
simplify the computational
effort to a great extent. In particular, the ergodic hypothesis
demands all states available to
an ensemble of the systems to be available to every member of
the system in the ensemble
as well [?]. Then, the spatial or volume average of function
χr(x, α) given by
〈χr(x, α)〉 = limV→∞
1
V
∫V
χr(x + y, α)dy, (26)
13
-
is independent of α and identical to the ensemble average,
χr(x) = Sr = 〈χr(x)〉 = cr, (27)
where cr is the volume fraction of the rth phase. Note that the
above assumption is usually
accepted as an hypothesis subject to experimental verification.
The statistical homogeneity
assumption means that value of the ensemble average is
independent of the position of
coordinate system origin. Then, for example, the two-point
matrix probability function reads
Smm(x1,x2) = Smm(x12), (28)
where xij = xj − xi. In the context of a representative volume
element (RVE: a material
element which effectively samples all microstructural
configurations) the one-point proba-
bility function Sr and the two-point probability function Srs
are the same in any RVE (a
micrograph of the material sample) irrespective of its position.
Thus only one such sample is
needed for their evaluation. When constructing the RVE we add an
additional requirement
with respect to its minimum size. Apart from the above statement
we shall require the size
of the RVE to be at least such that there exist two points
within the RVE which are statisti-
cally independent. Then, it appears acceptable to consider a
periodicity of the selected RVE.
This becomes particularly important when developing an efficient
procedure for evaluation
of Sr and Srs. Note that for an ergodic and periodic
microstructure the two-point probability
function Srs receives the following form
Srs(x) =1
Ω
∫Ω
χr(y)χs(x + y)dy, (29)
where Ω is the size of the RVE (the micrograph area). It is
worthwhile to mention that only
the Fourier transform of function Srs given by
S̃rs(ξ) =1
Ωχ̃r(ξ)χ̃s(ξ), (30)
14
-
is needed in H-S variational formulation [?]. Note that · now
stands for the complex conjugate.
When introducing a binary image of the actual microstructure may
evaluate Eq. (30) very
efficiently employing the discrete Fourier transform. See also
[?] for further discussion on
this subject. Eqs. (27) and (30) will be now implemented within
the framework of the H-
S variational principles. We present only the most important
aspects of the formulation
relevant to this study. For a personal review we refer the
reader to original papers by [?,?].
Additional references to related work are, e.g., [?,?] and
[?].
4.2 Extended primary Hashin-Shtrikman variational principle
Suppose that the composite body is loaded by prescribed surface
displacements resulting in
a uniform macroscopic strain E and by the local eigenstresses
λ(x) = −L(x)µ(x). With
reference to the primary Hashin-Shtrikman variational principle
the following representation
of local stresses is equivalent
σ(x) = L(x)�(x) + λ(x), σ(x) = L0�(x) + τ (x), (31)
where L(x) is the local stiffness matrix and L0 is the stiffness
matrix of a certain homogeneous
reference medium. The vector τ is called the polarization
stress. It can be shown that τ
satisfying the equilibrium conditions, constitutive equations
and boundary conditions is the
one, which minimizes the functional
Uτ =1
2
∫Ω
(ETΣ− (τ − λ)T(L− L0)−1(τ − λ)− 2τTE − �′Tτ − λTL−1λ
)dΩ, (32)
where the fluctuation part �′
of the local strain � is provide by (see [?])
�′(x) = �(x)−E =∫Ω
�∗0(x− x′) (τ (x′)− 〈τ 〉) dΩ(x′). (33)
15
-
�∗0(x− x′) is termed the fundamental solution that relates τ to
a strain derived under zero
displacement boundary conditions and for which the stress is
self-equilibrated.
Substituting Eq. (33) into Eq. (32) and then taking variation
with respect to τ provides a
system of algebraic equation for the searched polarization
stress τ . To facilitate the solution
we further restrict our attention to a piecewise uniform
distribution of polarization stress
τ r(x) = τ r and the eigenstress vector λr(x) = λr within a
given phase r. Then, with
reference to Eq. (23), the trial field for τ and eigenstress λ
at any point x located in the
sample α are provided by
τ (x, α) =n∑r=1
τ rχr(x, α), λ(x, α) =n∑r=1
λrχr(x, α). (34)
These expressions when plugged into functional Uτ Eq. (32) open
a way for evaluation of
its ensemble average Uτ , e.g., [?,?]. Performing variation of
Uτ with respect to τ r finally
supplies a set of equations for unknown phase averages of
polarization stress τ r
n∑s=1
[δrs(Lr − L0)−1cr −Ars
]τ s = Ecr + (Lr − L0)−1λrcr, r = 1, . . . , n, (35)
where the microstructure-dependent matrices Ars do not depend on
x and are provided by,
see [?],
Ars =∫Ω
�∗0(x− x′) [Srs(x− x′)− crcs] dΩ(x′) =1
(2π)2
∫Ω
�̃∗0(ξ′)S̃ ′rs(ξ
′)dξ′. (36)
Formal inversion of Eq. (35) yields the overall constitutive
equation in the form
σ = LE + λ, (37)
where the spatially average overall stiffness matrix L and the
macroscopic eigenstress vector
λ are provided by
16
-
L= L0 +n∑r=1
n∑s=1
crTrscs, (38)
λ=n∑r=1
n∑s=1
crTrscs(Ls − L0)−1λs. (39)
Trs then represents individual blocks of the inverse matrix to
the left hand side of system (35).
For a two-phase composite medium they can be written in the
form
A = Amm, Kr = Lr − L0,Trs = Kr
(cfKm + cmKf − cfcmA−1
) [Kf + Km −Kr + δrs(1− cr)A−1
], (40)
To introduce the thermal and viscoelastic effects we first
recall Eq. (4). Then, in analogy
with Eqs. (20) and (22) the incremental form of Eq. (37)
becomes
∆σi = Li∆Ei + ∆λi, (41)
and the current increment of λ and the instantaneous stiffness
matrix Lm of the matrix
phase attain the forms
∆λi = −n∑r=1
n∑s=1
crTrscs(Ls − L0)−1i (Ls)i(∆�0s + ∆�̂s
)i, s = m→ (Lm)i = ÊiL̂m, (42)
whereas the fiber phase is assumed elastic. Eqs (41) and (42)
drive the solution of a vis-
coelastic problem under strain control loading conditions
suitable for modeling the stress
relaxation.
4.3 Extended dual Hashin-Shtrikman variational principle
Consider a composite body under prescribed surface tractions
which produce a uniform
macroscopic stress Σ. In addition, a distribution of local
eigenstrains µ(x) can be introduced
in the present formulation. In analogy with Eq. (33) we write
the local constitutive equations
17
-
in the form
�(x) = M(x)σ(x) + µ(x), �(x) = M0σ(x) + γ(x), (43)
where M(x) now stands for the local compliance matrix and M0 is
the compliance matrix of a
homogeneous reference medium. The polarization strain γ, when
satisfying the compatibility
condition and the constitutive equation, provides the minimum of
the extended dual H-S
functional
Uγ =1
2
∫Ω
(ΣTE − (γ − µ)T(M−M0)−1(γ − µ) + 2γTΣ + σ′Tγ
)dΩ, (44)
where the fluctuation part σ′
of the local stress σ written in terms of polarization strain
γ
is, see [?],
σ′(x) = σ(x)−Σ = [σ∗0 (γ − 〈γ〉)]−M−10 (γ(x)− 〈γ〉) . (45)
The operator [σ∗0 (γ − 〈γ〉)] can be identified with the operator
[�∗0 (τ − 〈τ 〉)] when replacing
γ for τ and σ∗0 for �∗0 and suitably modifying the boundary term
to reflect the traction
boundary conditions. Specific forms of tensors �∗0 and σ∗0 can
be found, e.g., in [?].
Assuming only a piecewise uniform distribution of phase
polarization strain γr(x) = γr and
the phase eigenstress vector µr(x) = µr provides the trial
fields for γ and µ at any point x
located in the sample α in the form, recall Eq. (34),
γ(x, α) =n∑r=1
γrχr(x, α), µ(x, α) =n∑r=1
µrχr(x, α). (46)
We now proceed, in analogy with Section 4.2, by introducing Eqs.
(45) and (46) into func-
tional (44), evaluating an ensemble average of Uγ and finally
taking variation with respect
to γr to get
18
-
n∑s=1
{δrs[(Mr −M0)−1 + M−10
]cr −Brs −M−10 crcs
}γs
= Σcr + (Mr −M0)−1crµr, r = 1, 2, . . . , n. (47)
Eq. (47) represents a system of algebraic equations to be solved
for unknown components
of phase averages of the polarization strain γr. To continue,
recall Eq. (36) and write the
microstructure dependent matrices Brs in the form
Brs =1
(2π)2
∫Ω
σ̃∗0(ξ′)S̃ ′rs(ξ
′)dξ′. (48)
Finally, after symbolic inversion of Eq. (47) we arrive at the
macroscopic constitutive law,
see also Eqs. (37) – (39),
� =MΣ + µ, (49)
where the effective compliance matrixM and the macroscopic
eigenstrain vector µ read
M= M0 +n∑r=1
n∑s=1
crRrscs, (50)
µ=n∑r=1
n∑s=1
crRrscs(Ms −M0)−1µs. (51)
For a two-phase composite medium the matrices Rrs assume the
form
B = cfcmM−10 −Bmm, Nr =
[(Mr −M0)−1 + M−10
]−1,
Rrs = Nr(cfN2 + cmN1 − cfcmB−1
) [Nf + Nm −Nr + δrs(1− cr)B−1
]. (52)
When solving a viscoelastic problem we replace Eq. (49) by its
incremental counterpart such
that
∆�i =Mi∆Σi + ∆µi, (53)
19
-
and finally the current increment of µ and the instantaneous
compliance matrix Mm of the
matrix phase are expressed as
∆µi =n∑r=1
n∑s=1
crRrscs(Ms −M0)−1i(∆�0s + ∆�̂s
)i, s = m→ (Mm)i =
1
ÊiM̂m, (54)
Eqs. (53) and (54) can be used, while assuming the time
independent elastic behavior of the
fiber phase, to find the solution to a stress control
viscoelastic problem such as creep. The
results for a selected class of problems are presented in the
next section.
5 Numerical examples
As an example, consider a two-phase fibrous composite system
displayed in Fig. 1(b). As
suggested in [?] this medium can be regarded as ergodic and
statistically homogeneous thus
serving as a suitable candidate for the numerical analysis. Both
phases are homogeneous
with constant material properties listed in Table 1. The
Cartesian coordinate system with
phase EA ET GT νA a b n
[GPa] [GPa] [GPa] [GPa]−1 [GPa]−1
fiber 386 7.6 2.6 0.41
matrix 2.1 2.1 0.75 0.40 0.0474 0.00214 0.3526Table 1Material
properties of T30/Epoxy system.
the x3-axis directed along the fiber direction is selected.
Therefore, the macroscopic stress
and strain fields written in contracted notation are Σ =
{Σ11,Σ22,Σ12,Σ33} T and E =
{E11, E22, E12, E33} T. Recall that the generalized plane strain
conditions are assumed. In
the present study, the numerical results are derived for loading
applied within the transverse
plane section of the composite aggregate only. Both the strain
and stress control loading
conditions are considered in simulations. Fig. 5 illustrates the
time variation of the applied
load.
20
-
11
t [min]
Σ[MPa]
15
11.25
360 720 t [min]
Σ[MPa]
12
15
11.25
360 720
(a) (b)
11
t [min]
E[%]
360 720
0.5
0.375
t [min]
[%]E 12
360 720
0.5
0.375
(a) (b)
Fig. 5. Applied loading: (a,b) creep test, (c,d) relaxation
test.
The first set of figures (Figs. 6-9) represents the composite
response derived from the unit cell
model. The macroscopic creep behavior is considered first. Fig.
6 shows the time variation of
the overall strain developed under pure tensile and shear stress
loading conditions, respec-
tively (Fig. 5a,b). Similar response resulting from the strain
loading conditions is plotted in
Fig. 7. Individual results suggest that at least 5-fibers Unit
cell should be used in numerical
simulations to provide sufficiently accurate response of the
actual composite, Fig. 1(b). Note
that the same characteristic of the present material system was
discovered when studying
a pure-elastic behavior of such composites, [?]. However, unlike
the results derived assum-
ing pure elasticity, the viscoelastic response of the hexagonal
array model slightly deviates
from that found using the statistically equivalent unit cells.
Nevertheless, a very low con-
trast in material parameters in the transverse direction
promotes the hexagonal array model
as a suitable substitute for more complicated unit cells when
the fiber volume fraction is
sufficiently large.
21
-
0.0 200.0 400.0 600.0 800.0
t [min]
2.5e-03
3.0e-03
3.5e-03
4.0e-03
4.5e-03
5.0e-03O
vera
ll st
rain
E11
2-fibers Unit cell
5-fibers Unit cell
10-fibers Unit cell
20-fibers Unit cell
Hexagonal array
0.0 200.0 400.0 600.0 800.0
t [min]
8.0e-03
1.0e-02
1.2e-02
1.4e-02
1.6e-02
1.8e-02
Ove
rall
stra
in E
12
2-fibers Unit cell
5-fibers Unit cell
10-fibers Unit cell
20-fibers Unite cell
Hexagonal array
(a) (b)
Fig. 6. Overall response – Unit cell model: creep test.
0.0 200.0 400.0 600.0 800.0
t [min]
1.0e+01
1.5e+01
2.0e+01
2.5e+01
3.0e+01
Ove
rall
stre
ss Σ
11 [M
Pa]
2-fibers Unit cell
5-fibers Unit cell
10-fibers Unit cell
20-fibers Unit cell
Hexagonal array
0.0 200.0 400.0 600.0 800.0
t [min]
3.0e+00
3.5e+00
4.0e+00
4.5e+00
5.0e+00
5.5e+00
Ove
rall
stre
ss Σ
12 [M
Pa]
2-fibers Unit cell
5-fibers Unit cell
10-fibers Unit cell
20-fibers Unit cell
Hexagonal array
(c) (d)
Fig. 7. Overall response – Unit cell model: relaxation test.
Quite different conclusion, however, can be drawn from Fig. 8.
The macroscopic response
plotted in Fig. 8 provides evidence that increasing the material
contrast leads to a noticeable
difference in the material response derived from the hexagonal
array model and statistically
optimal unit cells. To arrive at such a result we simply
replaced the actual transversally
isotropic fiber with the isotropic one to attain a higher
contrast between the material prop-
erties of the fiber and matrix phases. Also note a possible
change in the smallest RVE to
be considered for numerical simulations (10-fibers UC).
Additional support for using the
22
-
0.0 200.0 400.0 600.0 800.0
t [min]
1.5e-03
2.0e-03
2.5e-03
3.0e-03
3.5e-03
4.0e-03
Ove
rall
stra
in E
11
5-fibers Unit cell
10-fibers Unit cell
20-fibers Unit cell
Hexagonal array
Fig. 8. Overall response – Unit cell model: creep test assuming
isotropic fiber.
optimal unit cells instead of the hexagonal array model is
provided by Fig. 9 suggesting
an anisotropic character of the present medium. Such a result
cannot be attained by sim-
ple periodic unit cells. The present approach, which draws on
the existence of a unit cell
statistically equivalent to the actual composite system, is
therefore preferable.
0.0 200.0 400.0 600.0 800.0
t [min]
1.5e+01
2.0e+01
2.5e+01
3.0e+01
Str
ess
[MP
a]
Σ22 due to ε22Σ11 due to ε11
Overall stress
Matrix stress
Fiber stress
0.0 200.0 400.0 600.0 800.0
t [min]
1.0e-03
2.0e-03
3.0e-03
4.0e-03
5.0e-03
6.0e-03
7.0e-03
Str
ain
ε11 due to Σ11ε22 due to Σ22
Overall strain
Matrix strain
Fiber strain
(a) (b)
Fig. 9. Overall and local response – Unit cell model: (a)
relaxation test, (b) creep test.
The remaining set of results (Figs. 10–14) was found when
employing the Hashin-Shtrikman
variational principles. Recall that the primary H-S principle
might be invoked to simulate
the relaxation response while the dual H-S principle should be
called to study the creep
behavior. In both instances, however, the resulting
representation of the viscoelastic response
is governed by the selection of a homogeneous comparison medium
(L0,M0). To this end, we
draw the readers attention to Fig. 10. First, recall Table 1 and
notice that the matrix moduli
23
-
0.0 200.0 400.0 600.0 800.0
t [min]
1.0e+01
1.5e+01
2.0e+01
2.5e+01
3.0e+01O
vera
ll st
ress
S11
[MP
a]
H-S Upper bound
H-S Estimate
H-S Lower bound
Unit cell
0.0 200.0 400.0 600.0 800.0
t [min]
2.5e-03
3.0e-03
3.5e-03
4.0e-03
4.5e-03
5.0e-03
Ove
rall
stra
in E
11
H-S Upper bound
H-S Estimate
H-S Lower bound
Unit cell
(a) (b)
Fig. 10. Overall response – hexagonal packing: (a) relaxation
test, (b) creep test.
are indeed weaker than those of fiber. Therefore, according to
[?] we select the matrix phase
to fill individual entries of L0 and M0 providing we search for
a lower bound on the relaxation
response (Fig. 10(a)) and an upper bound on the creep response
(Fig. 10(b)), respectively.
The fiber phase is then selected to yield estimates on opposite
bounds. A number of other
results, contained within the H-S bounds, can be derived when
mixing individual phases to
set L0 and M0 (e.g., L0 =12(Lf + Lm)).
(a) (b)
Fig. 11. Idealized binary images: (a)–resolution 488x358 pixels,
(b)–resolution 244x179 pixels.
Fig. 10 gives some idea of this approach assuming hexagonal
packing of fibers. One notewor-
thy feature of the hexagonal array model is the correspondence
of the periodic hexagonal
unit cell with the Mori-Tanaka averaging technique. It is well
known that the Mori-Tanaka
24
-
estimates of the overall response of composites with weak
matrices correspond to the lower
and upper bounds derived from the primary and dual H-S
variational principles, respectively.
From this point of view one may also judge the results derived
from the periodic hexagonal
unit cell (solid lines in Fig. 10a,b). Therefore, in order to
make the results found from the H-S
variational principles comparable with those derived previously
using the optimal unit cells,
we selected the matrix phase to create the 4x4 homogeneous
stiffness L0 and compliance
M0 matrices. Also note that these matrices are kept constant
throughout the integration
process. This assumption is acceptable since the instantaneous
moduli of the matrix phase
do not vary considerably for the selected time-stepping
procedure.
0.0 200.0 400.0 600.0 800.0
t [min]
2.5e-03
3.0e-03
3.5e-03
4.0e-03
4.5e-03
5.0e-03
Ove
rall
stra
in E
11
976 x 716 pixels
488 x 358 pixels
244 x 358 pixels
122 x 84 pixels
0.0 200.0 400.0 600.0 800.0
t [min]
8.0e-03
1.0e-02
1.2e-02
1.4e-02
1.6e-02
1.8e-02
Ove
rall
stra
in E
12
976 x 716 pixels
488 x 358 pixels
244 x 179 pixels
122 x 84 pixels
(a) (b)
Fig. 12. Overall response – Hashin-Shtrikman principle: creep
test.
0.0 200.0 400.0 600.0 800.0
t [min]
1.0e+01
1.5e+01
2.0e+01
2.5e+01
3.0e+01
Ove
rall
stre
ss Σ
11 [M
Pa]
976 x 716 pixels
488 x 358 pixels
244 x 179 pixels
122 x 84 pixels
0.0 200.0 400.0 600.0 800.0
t [min]
3.0e+00
3.5e+00
4.0e+00
4.5e+00
5.0e+00
5.5e+00
Ove
rall
stre
ss Σ
12 [M
Pa]
976 x 716 pixels
488 x 358 pixels
244 x 179 pixels
122 x 84 pixels
(a) (b)
Fig. 13. Overall response – Hashin-Shtrikman principle:
relaxation test.
25
-
200.0 400.0 600.0 800.0
t [min]
1.5e+01
2.0e+01
2.5e+01
3.0e+01S
tres
s [M
Pa]
Σ11 due to ε11Σ22 due to ε22
Overall stress
Matrix stress
Fiber stress
0.0 200.0 400.0 600.0 800.0
t [min]
1.0e-03
2.0e-03
3.0e-03
4.0e-03
5.0e-03
6.0e-03
7.0e-03
Str
ain
ε11 due to Σ11ε22 due to Σ22
Overall strain
Matrix strain
Fiber strain
(a) (b)
Fig. 14. Overall and local response – Hashin-Shtrikman
principle: (a) relaxation test, (b) creep test.
0.0 200.0 400.0 600.0 800.0
t [min]
1.5e+01
2.0e+01
2.5e+01
3.0e+01
Str
ess
[MP
a]
UCH-S: LB
Overall stress
Matrix stress
Fiber stress
0.0 200.0 400.0 600.0 800.0
t [min]
1.0e-03
2.0e-03
3.0e-03
4.0e-03
5.0e-03
6.0e-03
7.0e-03
Str
ain
Unit cellH-S: UB
Overall strain
Matrix strain
Fiber strain
(a) (b)
Fig. 15. Overall and local response – UC vs. H-S: (a) relaxation
test, (b) creep test.
As outlined in Section 4.1, evaluation of the overall response
of random composites requires
first selection of a RVE. Binary images of the RVE of the
present material system, Fig. 1(b),
which complies with certain requirements discussed in Section
4.1, are displayed in Fig. 11.
The RVEs of Fig. 11 were employed to evaluate the microstructure
dependent matrices in
Eqs. (36) and (48). The effect of bitmap resolution on the
overall response was examined
first. Results appear in Figs. 12 and 13. Evidently, even low
resolution of 244x179 pixels ( ≈
55 pixels per fiber ) provides sufficiently accurate results.
This should also hold for combined
loading. Such a result is quite encouraging, particularly if one
would like to increase the
26
-
size of the RVE. Fig. 14 further confirms ability of this
approach to model an anisotropic
character of the present material system already suggested by
the FEM analysis of optimal
periodic unit cells.
Finally, we bring some comparison between the UC analysis and
the H-S variational prin-
ciples plotted in Fig. 15. As expected, recall our previous
discussion on H-S bounds, the
relaxation data obtained from 5-fibers periodic UC correlates
fairly well with the H-S lower
bound and similarly the creep response of UC is found close to
the H-S upper bound. Thus
the applicability of both approaches to simulate the
viscoelastic behavior of statistically
homogeneous material systems such as the one under present study
is confirmed.
6 Conclusion
Most of the real composite material systems experience a random
distribution of reinforce-
ments. In this contribution, two generally accepted approaches
in the micromechanics were
reviewed and applied to the analysis of random statistically
homogeneous composite systems
undergoing viscoelastic deformation. Formulation of macroscopic
constitutive equations was
first outlined within the framework of periodic fields. Random
nature of microstructure
configuration was accounted for through various unit cells found
such as to represent the
material statistics of real composites. An effect of number of
reinforcements in the unit cell
needed for an accurate representation of macroscopic response
was examined. In view of the
results presented in [?] and plots displayed in Figs. 6-9 it
appears necessary to introduce at
least five fibers in the optimal unit cell to arrive at
sufficiently accurate predictions of the
overall behavior of the present material system. In addition,
the present results also proved
necessity for an accurate modeling of microstructure
configuration particularly when the
contrast between the phase material parameters becomes
large.
The second part of this contribution revisited the well known
Hashin-Shtrikman variational
27
-
principles further extended to reflect the presence of
eigenstresses and eigenstrains in the
formulation of macroscopic equations. An efficient procedure for
evaluation of required mate-
rials statistics, already examined in [?], was implemented in
connection with binary images of
a real microstructure. The results plotted in Figs. 12-13
illustrate insensitivity of the solution
procedure to a selected bitmap resolution, which may further
increase expected efficiency of
this approach. Final comparison with the FEM analysis shown in
Fig. 15 assesses the appli-
cability and supports the use of this method, at least in the
range of elastic or viscoelastic
response.
7 Acknowledgement
Financial support was provided by the research project CEZ:MSM
210000003.
28
IntroductionLocal constitutive equationsDescription of
viscoelastic behavior via periodic fieldsOverall viscoelastic
response via Hashin-Shtrikman principlesReview of basic statistical
descriptorsExtended primary Hashin-Shtrikman variational
principleExtended dual Hashin-Shtrikman variational principle
Numerical examplesConclusionAcknowledgement