Embed Size (px)
Citation preview
![Page 1: P. Vescovo, G. Bourbon, P. Le Moal et P. Minotti ... · mechanisms in order to acquire, store, distribute and process information at previously unimaginable speed and volume [3]](https://reader033.pdfslide.net/reader033/viewer/2022041922/5e6c32d7fe19200ae42bd0cd/html5/thumbnails/1.jpg)
J3eA, Journal sur l’enseignement des sciences et technologies de l’information et des systèmes, Volume 2, Hors-Série 2, 16 (2003) DOI : http://dx.doi.org/10.1051/bib-j3ea:2003616 © EDP Sciences, 2003
Contrôle actif de structures micro-électromécaniques MEMS-based active control of micro and macro-scale structures
P. Vescovo, G. Bourbon, P. Le Moal et P. Minotti
Laboratoire de Mécanique Appliquée R. Chaléat 24 chemin de l’Épitaphe
F-25000 Besançon, France
![Page 2: P. Vescovo, G. Bourbon, P. Le Moal et P. Minotti ... · mechanisms in order to acquire, store, distribute and process information at previously unimaginable speed and volume [3]](https://reader033.pdfslide.net/reader033/viewer/2022041922/5e6c32d7fe19200ae42bd0cd/html5/thumbnails/2.jpg)
MEMS – BASED ACTIVE CONTROL OF MICRO AND MACRO – SCALE STRUCTURES
Paul Vescovo, Gilles Bourbon, Patrice Le Moal, Patrice MinottiLaboratoire de Mécanique Appliquée R. Chaléat , 24 Chemin de l’Epitaphe 25000 Besançon
Résumé : Les technologies silicium sont aujourd’hui connues pour leur double capacité à produire des millions de composants microscopiques aucours d’un seul et même lot de fabrication, et à intégrer des composants électroniques et mécaniques dans des structures monolithiques.Les réseaux de microactionneurs à base de technologie silicium ouvrent des perspectives nouvelles dans de nombreux domaines. Les dimensionsimpliquées par de tels dispositifs privilégient naturellement les applications aux échelles millimétrique et/ou micrométrique et concernent,notamment, la manipulation et l’hybridation parallèle et massive des composants sur silicium dans l’industrie électronique. Mais les recherchesconsacrées aux réseaux de microactionneurs pourraient également avoir des répercussions à l’échelle macroscopique. Les technologies MEMSouvrent de nouveaux horizons dans le domaine de l’intégration des composants mécaniques, électroniques et sensoriels. Ces technologies émergentespermettent de dupliquer massivement des systèmes micromécaniques complexes à la surface de puces en silicium. Le présent article donne unéclairage particulier sur les futurs systèmes distribués sur silicium et leurs applications potentielles dans le domaine du contrôle actif de structure àbase de technologies MEMS. Les projections actuelles montrent que les nouvelles générations de systèmes MEMS distribués trouveront desapplications industrielles à des échelles diverses et notamment à l’échelle macroscopique, là où se situent l’essentiel des besoins de l’homme.
1. Introduction
Although today’s structure and product designerhave many materials with varied properties tochoose from, once a particular material is selectedand cut to size, its properties remain fixed. As aconsequence, most of individual parts ofconventional structures are unable to adapt changingconditions. On the other hand, making the dynamicbehavior of matter programmable has the potentialto enable “control – centric” products and processesthat actively adapt to changing conditions, achievingstrength and precision operation through intelligentadjustment of their dynamic behavior [1] [2].
Because the silicon micromachining technologyhave the potential to integrate both mechanicalstructures and control circuits, MEMS-based activecontrol of structures therefore appears to be one ofthe most promising challenges of MST. As anexample, numerous projects are being developed inorder to enhance active control of super-compactrigid disk drives, using auxiliary IC-processedactuators directly connected to read/writetransducers (see section 2). Considerable efforts alsobegan a few years ago so as to demonstratetechniques that will enable distributed MEMS-basedarrays of sensors, actuators and computationalelements embedded within materials and onsurfaces, to enhance and control the behavior ofsophisticated structures. Current research includesthe development of software and architectures forcoordinating the actions of large number ofdistributed devices. New manufacturing methods arealso investigated so as to bring MEMS-style batchfabrication to bear on macro-scale objects.
The futurist ideal system is one in which largenumbers of sensors and actuators will be able towork relatively independently to achieve globalperformance criteria such as structural stability andmechanical modulation of surface properties. As one
of the steps towards autonomous distributedsystems, the following gives the current state of theart in the area of distributed IC-processed devices,with a special emphasis on microactuators and theircontrol strategies.
2. Active control of read/write magnetic head
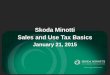
IC-processed actuators are expected to providehigh-bandwith servo-controlled precisionmechanisms in order to acquire, store, distribute andprocess information at previously unimaginablespeed and volume [3]. High-performance IC-processed mechanical systems are being designed inorder to facilitate the introduction of a newgeneration of super-compact computer peripheraldevices. Angular actuation is widely selected (e.g.against linear actuation), because such aconfiguration allows high lateral stiffness,minimizing the sensitivity of the MEMS-basedservo-system to shock loading in the plane of thedisk [4]. In addition, electrostatic actuation appearsto be particularly efficient compared with otheractuation approaches, because it allows both highaccuracy and high-bandwith operation as well asintrinsic capacitive measurement of displacement.
Figure 1. (a) Tiny disk drive after IBM, http://www.storage.ibm.com. (b) Servo positioning, mechanismscheme of a magnetic disk drive including an IC-processedactuator between the slider and the gimbal.
![Page 3: P. Vescovo, G. Bourbon, P. Le Moal et P. Minotti ... · mechanisms in order to acquire, store, distribute and process information at previously unimaginable speed and volume [3]](https://reader033.pdfslide.net/reader033/viewer/2022041922/5e6c32d7fe19200ae42bd0cd/html5/thumbnails/3.jpg)
3 Parallel manipulation using mechanicalmodulation of surface properties
3.1. Concept of Distributed Microactuators
Most of prospective applications of IC-processedactuators presently deal with optics, transportation andaerospace, robotics chemical analysis systems,biotechnologies, medical engineering and microscopyusing scanned micro probes [5]. These applicationshave a common feature in that only very light objectssuch as mirrors, magnetic heads, valves, cells andmicroprobes are manipulated and that little physicalinteraction with the external environment is necessary.The main reason is that most of present micrometersize IC-processed actuators are still primitive andlarge forces cannot be transmitted to the externalworld.
Although the small size of IC-processedcomponents is a very distinctive feature of the MEMStechnology, it has other, may be even more attractivefeatures. Thus, a decisive advantage offered by thesilicon micromachining technology is the possibilityof implementing sensors and actuators withininteractive arrays. Cooperative work of manyactuation cells can perform a large task, even onesingle IC-processed actuator can only produceunusable force or perform insignificant motion.Therefore, in addition to miniaturization, the conceptof multiplicity appears to be another key to successfulmicrosystems.
The third key to successful microsystems dealswith the integration of microelectronics which is alsoessential for distributed microactuators to cooperatewith each other and to perform a given macroscopictask.
Before discussing sophisticated autonomousdistributed systems that will integrate many smartmodules on a wafer without assembly, the followinganalyses former investigations on arrayedmicroactuators for conveyance systems.
3.2. Concept of Programmable Vector Fields usingIC- Processed Micromanipulators
Former IC-processed micromanipulators involvingactuator arrays have been investigated in Japan [6].The key idea was to coordinate simple motions ofmany microactuators so as to obtain significantmacroscopic work out of distributed IC-processedactuators. As shown in Fig. 1, earlier investigationsfocused on conveyance systems using respectivelythermally driven cantilevers and air flow systems [7][8].
Massively-parallel microfabricated motion pixelshas been the first step towards autonomous distributedsystems. Investigations are now moving to newautomation devices allowing controlled self-assembly
of parts via electromechanical modulation of surfaceproperties. Using IC-processed sensors and actuators,programmable vector fields can be theoretically usedto control a variety of flexible planar part feeders thatwill be needed in the microelectronics industry [9].
ActuationCell
Conveyance
(a): Unidirectional Conveyance SytemBased on Air Flow Control
offoff
onoff
Pressure
Air Flow Air Flow
Pressure
(b)
(c)
PressureDistribution
PressureDistribution
Operating Principle :(b) Initial state. (c) A voltage is appliedon the right-side closing electrode
Air Flow
Figure 2(a) Air-flow conveyance system involvingdistributed nozzles. After [7].
A A A A
A A A A
A A A A
A A A A
A A A A
off
o f f
o f f
o f f
off
off
on
o n
on
o n
S t e p p i n gM o t i o n
A : A c t u a t o r
Load
Figure 2(b) Ciliary motion system using thermalactuation. After [8].
![Page 4: P. Vescovo, G. Bourbon, P. Le Moal et P. Minotti ... · mechanisms in order to acquire, store, distribute and process information at previously unimaginable speed and volume [3]](https://reader033.pdfslide.net/reader033/viewer/2022041922/5e6c32d7fe19200ae42bd0cd/html5/thumbnails/4.jpg)
Figure 3 gives an illustration of the principle oftactile shape recognition using contact detection ofvarious manipulated parts [10]. However,sophisticated systems combining many IC-processedsensors and actuators are yet challenging. Thus, recentattention focused on sensor-less strategies such asillustrated in Fig. 4 [11].
a) b) Actuators Sensor
: 1 mm
Digital Part Footprints
East
North
West
Figure 3. (a)Concept of multidirectional motivesurfaces using modern array technologies and(b)principle of tactile shape recognition using contactdetection of manipulated parts. After [10].
a)
b)Figure 4. (a) Micromanipulator involving distributedIC-processed electrostatic oscillators [9]. (b)Sensor-lesssorting strategy using force vector fields: parts ofdifferent sizes are first centered and subsequentlyseparated depending on their size. After Böhringer etal. [11].
When a part is placed on top of an actuator array,the programmed vector field induces a force andmoment upon it. Then, by chaining togethersequences of local vector fields, the part is conveyeduntil the desired final state is reached. Assuming thepart may come to rest in a dynamic equilibrium stateover time, the resulting strategy requires no sensingand enjoy efficient planning algorithms [11].
As a second step towards fully integrated partfeeders, the first micromachined IC-processedactuator array with on-chip CMOS circuitry wasrecently developed at the Department of ElectricalEngineering of Stanford University. The array iscomposed of an 8 x 8 array of elementary motion
pixels, each having four orthogonally orientedactuators, in an overall die size of 9.4 x 9.4 mm (seeFig. 5) [12].
The polyimide-based ciliary actuators werefabricated directly above the selection and drivecircuitry. As shown in Fig. 5, the array has beensuccessfully programmed to do simple linear anddiagonal translations as well as rotating-fieldmanipulations. The tasks were demonstrated using flatsilicon pieces of various shapes having either 0.5 and0.1 mm thickness.
Figure 5. First CMOS-integrated actuator array. After [11].
4 Towards MEMS-based control of acousticalimpedance
There appear to be a number of applications inacoustics that could benefit from MEMS-basedelectromechanical transducers which efficientlyradiate acoustic waves into an adjacent medium, andcomes in the form of a flexible sheet, that can bebounded to the surface of macro-scale structures [13][14]. In the case were the medium is a gas, such as air,examples of potential applications include active noisecontrol, acoustic flow control and specialty audiosystems such as CMOS-MEMS membranes for audio-frequency acoustic radiation [15].
As a first step towards MEMS-based active controlof noise, Fig. 6 shows an experimental platform whichintegrates a vibrating plate isolated with an array ofsurface-micromachined acoustic transducers. Thetransducers have been designed so that the radiatedpressure in far field would be significantly decreasedat frequencies on the order of a few kHz. Thevibrating plate is made of a 500 micrometer thicksilicon wafer that is clamped on a φ 50mm circle. The
![Page 5: P. Vescovo, G. Bourbon, P. Le Moal et P. Minotti ... · mechanisms in order to acquire, store, distribute and process information at previously unimaginable speed and volume [3]](https://reader033.pdfslide.net/reader033/viewer/2022041922/5e6c32d7fe19200ae42bd0cd/html5/thumbnails/5.jpg)
obtained circular plate is then sustained in transversevibration through input external forces that aresupplied with a driving frequency set at the first out-of-plane resonance frequency of the clamped siliconplate. Thus, the vibrating plate works as a singlecrystal silicon resonant membrane which radiatessignificant acoustic pressure in the audible range.
(a) (b)
(c)
(d)
94
96
98
100
102
104
106
108
110
112
114
0 0.2 0.4 0.6 0.8 1
Distance to the emitting source (m)
Soun
d P
ress
ure
Lev
el (d
B)
Peak to Peak Amplitude : 3µmFrequency : 2kHz
Figure 6. MEMS-based active control of noise usingsurface-micromachined array of polysilicon acoustictransducers. (a) and (b) Photographs showingrespectively the silicon wafer before and afterclamping into the metallic frame. The array of 8000acoustic transducers is located at the center of thewafer. (c) and (d) Acoustic radiation of theuncontrolled silicon membrane which is expected to bekilled through open-loop control of MEMS-basedtransducers. After LMARC/ IMFC-Besançon (France).
As shown in Figs. 6 (c) and (d), with maximalpeak-to-peak oscillations of 3 microns at the center ofthe membrane, the radiated acoustic pressure level ison the order of 100 dB at 2 kHz driving frequencywhich is closed to the resonance frequency of thesilicon membrane.
The MEMS-based acoustic transducer array that isdistributed over the emitting surface of the siliconmembrane combines 8000 parallel plate polysiliconcapacitors. Quasi-static control of the out-of-planemotion of the elementary acoustic transducers can be
achieved from dc up to 15 kHz, with an ac amplituderesponse on the order of a few microns under lowdriving voltage (e.g. roughly 20 Volts). So, even ifout-of-plane oscillations are still quite restricted,parasitic acoustic pressure levels on the order of 100dB at 2kHz are expected to be actively killed, bycontrolling the local motion of each MEMS-basedacoustic transducer. In practice, the driving annularelectrodes deposited over the silicon wafer (e.g. theemitted surface), are supplied in such a way that theabsolute displacement of acoustic transducersbecomes nearly negligible, whatever the localdisplacement δ of the vibrating silicon substrate.
Industrial applications involving MEMS-basedacoustic transducers are mainly expected inaeronautics and car industry so as to significantlyreduce parasitic acoustic radiation of aircraft reactorsand internal combustion engines. Similardevelopments are also expected in the field of MEMS-based flow sensors and actuators for drag reduction innext generation aircraft and spacecraft.
5 Towards micromechanical flying insects
The high level of interest in developing newclasses of micro air vehicles (MAV), such as artificialinsects, is the result of the nearly simultaneousemergence of their technological feasibility and anarray of new needs in environment. Technologicalfeasibility of artificial insects follows from recentadvances in MEMS technology that allow the designof processes and systems combining microelectronicscomponents with comparably-sized mechanicalelements [16]. The arsenal of well established micro-fabrication techniques provides a high degree ofoptimism with respect to integrated propulsionsystems inspired from biological mechanisms [17][18]. Other maturing microsystems such as tiny CCD-array cameras, small infra-red sensors, chip-sizedsubstance detectors and thin film solar cells, alsocontribute to the emerging interest in designing verysmall flight vehicles that mimic biological structures.
Artificial insects are yet challenging. Severalenabling technologies will be simultaneously neededin order to successfully integrate functional blockssuch as propulsion and power system, sensors andprocessing units, as well as air frame structure andcommunication units into MAV systems. In addition,innovative solutions and original designs will beneeded to solve aerodynamics and control, propulsionand power as well as navigation and communication[16].
As a first step towards MEMS-based artificialinsects, Fig. 7 shows first-generation prototypes ofsilicon-based ornithopters involving flapping wingpropulsion systems that mimic nature. Four degrees offreedom in each wing are used to achieve flight innature: flapping, lagging, feathering and spanning
![Page 6: P. Vescovo, G. Bourbon, P. Le Moal et P. Minotti ... · mechanisms in order to acquire, store, distribute and process information at previously unimaginable speed and volume [3]](https://reader033.pdfslide.net/reader033/viewer/2022041922/5e6c32d7fe19200ae42bd0cd/html5/thumbnails/6.jpg)
[19]. However, not all flying animals implement all ofthese motions. Thus, most insects do not use thespanning technique (e.g. successive expanding andcontracting of the wingspan). In addition, insects withlow wing beat frequencies on the order of a few tensHz, generally have restricted lagging capabilities (e.g.forward and backward wing motion parallel to theflying body). Thus, flapping flight is possible withonly to degrees of freedom that respectively satisfyflapping and feathering.
The MEMS-based wings shown in Fig. 39 havebeen designed so as to allow both flapping (e.g.angular movement about an axis in the direction offlight), and feathering (e.g. angular movement aboutan axis in the center of the wing which tilts the wingto change its angle of attack). So when they arecoordinated, these two degrees of freedom areexpected to provide lift not only on the down stroke,but also on the up stroke, as it is the case for flyinginsects.
a)
b) Figure 7. (a) Silicon-based ornithopters. four inchesSOI wafer including various wings covered withdistributed microactuators,(b) SEM micrograph and 3D video image showingarrayed actuators distributed over the wing’s surface.After LMARC/ IMFC-Besançon (France).
Figure. 8 shows a SEM micrograph of a wing thathas been recently released from the silicon wafer. Thewing is going to be actuated through the 20,000elementary actuation cells that are distributed over theupper surface of the centimeter scale single crystalsilicon structure. According to the micrometerthickness of both the single crystal silicon wing (e.g. 5to 10 microns), and the distributed polycrystallinesilicon actuators, the overall mass of the flappingwing system is restricted to a few milligrams. Thedesign specifications of the proposed MEMS-basedflapping system are summarized in Table I.
___________________________________________Wingspan lateral dimensions ~ 40 x 10 millimetersWingspan structural thickness ~ 5 to 10 micronsDistributed actuation cellsper wing ~ 20,000Overall mass of the flappingwing propulsion system ~ 1.2 milligramWingbeat frequency ~ 30 to 50 HzFlapping amplitude range ~ +/- 50°Expected on-board energydensity (Lithium Battery) ~ 360 Joules/ gram___________________________________________
TABLE 1. Design specifications of the MEMS-basedflapping wing system shown in Fig. 6
Figure 8. First released prototype of a self-actuatedflapping wing involving 20,000 distributed actuationcells. After LMARC/ IMFC-Besançon (France).
6 Conclusion
Historically, conventional ultra-precision tool-machining historically made significant contributionsto microsystems technology (MST), but the speed ofprogress was relatively slow until IC-technologieswere introduced to the fabrication process ofmechanics. Also, MEMS technology, which basicallymakes use of the tools of microelectronics, gave riseto a growing motivation for MST. According toremarkable progresses briefly summarized in thiscontribution, MEMS technology has recentlyexhibited the potential to integrate silicon-basedmechanical structures, CMOS circuits as well asfluidic and photonic devices with very smalldimensions on a common substrate. It is thus clearthat MST and MEMS will have a profound influencein many areas dealing, in particular, with mechanicalengineering.
Remarkable progresses that have been achievedfrom early 1990’s in microsystem technology (MST),will certainly result in a growing involvement ofmechanical engineers in the field of MEMS-basedactive control of micro and macro-scale structures. Sofar, electrical engineers devoted themselves in MEMSprocesses and materials, but the involvement ofmechanical engineers becomes obviously essential forinventing new actuation mechanisms and improving
![Page 7: P. Vescovo, G. Bourbon, P. Le Moal et P. Minotti ... · mechanisms in order to acquire, store, distribute and process information at previously unimaginable speed and volume [3]](https://reader033.pdfslide.net/reader033/viewer/2022041922/5e6c32d7fe19200ae42bd0cd/html5/thumbnails/7.jpg)
design tools towards MEMS-based smart structures. Itwill be important, and even decisive for the success ofMST, that in design of mechanical structures, themeans offered by the MEMS technology will beadequately applied. Miniaturization of systems usinglinear reduction of macroscopic scale structures wouldnot adequately take into account both scaling effectsand potentials of the MEMS technology. Additionally,it would not be reasonable to use MEMS technologyto produce conventional components on a reducedscale, because taking advantage of batchwisemanufacture only, would not be wholly satisfactory.
Mechanical engineers will thus have to learn MSTand MEMS before investigating completely newdesign strategies that will optimize the advantagesoffered by MEMS technology. MEMS-based activecontrol of macro-scale structures using bottom-updesign strategies will be clearly of particular interest(e.g. mainly because humans are living on themacroscopic scale), and will probably decide whetheror not MST and MEMS can gain ground on themarket over conventional technologies. The proposedapproach to smart structure design using MEMStechnology is dedicated to various readers. Tostudents and those who are not familiar with MEMS,it is expected to help them to better understand themeanings of miniaturization and integrated systems.To experts in mechanical engineering, it finallyprovides an insight on how both MEMS-basedstructures and fabrication processes should besimultaneously designed to successfully integratefunctional blocks into MEMS-based responsivesystems for active control of micro and macro-scalestructures.
References:
[1] Minotti, P. (2002), Responsive systems for activevibration control, Nato Science Series, Kluwer AcademicPublishers, 325-377.[2] Berlin, A.A. (1997) MEMS based active control of macro-
scale objects, Semiannual Technical Progress Report n°DABT63-95-C-0025, Defense Advanced Research ProjectAgency.
[3] Temesvary, V., Wu, S., Hsiech, W.H., Tai, Y.C. and Miu,D.K. (1995) Design, fabrication and testing of siliconmicrogimbals for super-compact rigid disk drives, Journal ofMicroelectromechanical Systems, 4, 18-26.
[4] Horsley, D.A., Cohn, M.B., Singh, A., Horowitz, R. andPisano, A. (1998) Design and fabrication of an angularmicroactuator for magnetic disk drives, Journal ofMicroelectromechanical Systems 7, 141-148.
[5] Fujita, H. (1996) Future of actuators and microsystems,Sensors & Actuators A, 56, 105-111.
[6] Fujita, H., Ataka, M. and Konishi, S. (1996) Group work ofdistributed microactuators, Robotica, 14, 487-492.
[7] Ataka, M., Omokada, A., Takeshima, N. and Fujita, H. (1993)Polyimide bimorph actuators for a ciliary motion system,Journal of Microelectromechanical Systems 2, 146-150.
[8] Konishi, S. and Fujita, H. (1994) A conveyence system usingair flow based on the concept of distributed micro motionsystems, Journal of Microelectromechanical Systems 3, 54-58.
[9] Böhringer, K.F., Donald, B.R., Mihailovich, R. andMacdonald, N.C. (1994) A theory of manipulation and controlfor microfabricated actuator arrays, Proceedings onMicroelectromechanical Systems, Oiso (Japan), 102-107.
[10] Bourbon, G., Minotti, P., Hélin, P. and Fujita, H. (1999)Toward smart surfaces using high-density arrays of silicon-based mechanical oscillators, Journal of Intelligent MaterialSystems and Structures, 10, 534-540.
[11] Böhringer, K.F., Donald, B.R., Mihailovich, R. andMacdonald, N.C. (1994) Sensor-less manipulation usingmassively parallel microfabricated actuator arrays,Proceedings of IEEE International Conference on Roboticsand Automation, San Diego (US), 826-833.
[12] Suh, J.W., Darling, R.B., Böhringer, K.F., Donald, B.R.,Baltes, H. and Kovacs, G.T.A. (1999) CMOS integratedciliary actuator array as a general purpose micromanipulationtool for small objects, Journal of MicroelectromechanicalSystems 8, 483-496.
[13] Whitehead, L.A. and Bolleman, B.J. (1995) Microstructuredelastomeric electromechanical film transducer, Journal ofAcoustical Society of America, 103, 389-395.
[14] Collet, M. and Minotti, P. (2001) Toward acousticalimpedance control of vibrating walls using silicon-basedactive skin, Proceedings of the 5th SIAM Conference onControl and its Applications, San Diego (US), P. 241.
[15] Neumann, J.J. and Gabriel, K.J. (2002) CMOS-MEMSmembrane for audio-frequency acoustic actuation, Sensors &Actuators A, 95, 175-182.
[16] McMichael, J.M. and Francis, M.S. (1997) Micro airvehicles: toward a new dimension in flight,http://www.darpa.mil/tto/mav
[17] Fearing, R.S., Chiang, K.H., Dickinson, M.H., Pick, D.L.,Sitti, M. and Yan, J. (2000) Wing transmission for amicromechanical flying insect, Proceedings of IEEEInternational Conference on Robotics and Automation, SanFrancisco (US), 1509-1516.
[18] Pornsin-sirirak, T.N., Lee, S.W., Nassef, H., Grasmeyer, J.,Tai, Y.C., Ho, C.M. and Keennon, M. (2000), 13th IEEEInternational Conference on Microelectromechanical Systems,Miyazaki (Japan), 799-804.
[19] Azuma, A. (1992) The biokinetics of flying and swimming,Springer Verlag-Tokyo.
![Page 8: P. Vescovo, G. Bourbon, P. Le Moal et P. Minotti ... · mechanisms in order to acquire, store, distribute and process information at previously unimaginable speed and volume [3]](https://reader033.pdfslide.net/reader033/viewer/2022041922/5e6c32d7fe19200ae42bd0cd/html5/thumbnails/8.jpg)