19 Singularity Robust Inverse Dynamics of Parallel Manipulators
S. Kemal Ider Middle East Technical University Ankara,Turkey 1.
Introduction Parallel manipulators have received wide attention in
recent years. Their parallel structures
offerbetterloadcarryingcapacityandmoreprecisepositioningcapabilityoftheend-effector
compared to open chain manipulators. In addition, since the
actuators can be placed closer to the base or on the base itself
the structure can be built lightweight leading to faster systems
(Gunawardana & Ghorbel, 1997; Merlet, 1999; Gao et al., 2002
).Itisknownthatatkinematicsingularpositionsofserialmanipulatorsandparallel
manipulators,arbitrarilyassignedend-effectormotioncannotingeneralbereachedbythe
manipulatorandconsequentlyatthoseconfigurationsthemanipulatorlosesoneormore
degrees of freedom. In addition, the closed loop structure of
parallel manipulators gives rise
toanothertypeofdegeneracy,whichcanbecalleddrivesingularity,wheretheactuators
cannot influence the end-effector accelerations instantaneously in
certain directions and the actuators lose the control of one or
more degrees of freedom. The necessary actuator forces become
unboundedly large unless consistency of the dynamic equations are
guaranteed by the specified
trajectory.Thepreviousstudiesrelatedtothedrivesingularitiesmostlyaimatfindingonlythe
locations of the singular positions for the purpose of avoiding
them in the motion planning stage (Sefrioui & Gosselin, 1995;
Daniali et al, 1995; Alici, 2000; Ji, 2003; DiGregorio, 2001;
St-Onge & Gosselin, 2000). However unlike the kinematic
singularities that occur at workspace
boundaries,drivesingularitiesoccurinsidetheworkspaceandavoidingthemlimitsthe
motion in the workspace. Therefore, methods by which the
manipulator can move through the drive singular positions in a
stable fashion are necessary.
Thischapterdealswithdevelopingamethodologyfortheinversedynamicsofparallel
manipulatorsinthepresenceofdrivesingularities.Tothisend,theconditionsthatshould
besatisfiedfortheconsistencyofthedynamicequationsatthesingularpositionsare
derived.Forthetrajectoryoftheend-effectortoberealizablebytheactuatorsitshouldbe
designedtosatisfytheconsistencyconditions.Furthermore,forfindingtheappropriate
actuatorforceswhendrive singularitiestakeplace,the
dynamicequationsaremodifiedby using higher order derivative
information. The linearly dependent equations are replaced by
themodifiedequationsintheneighborhoodsofthesingularities.Sincethelocationsofthe
drivesingularitiesandthecorrespondingmodifiedequationsareknown(asderivedin
Section 3), in a practical scenario the actuator forces are found
using the modified equations Source: Parallel Manipulators, New
Developments, Book edited by: Jee-Hwan Ryu, ISBN 978-3-902613-20-2,
pp. 498, April 2008,I-Tech Education and Publishing, Vienna,
AustriaOpen Access Database
www.intehweb.comwww.intechopen.comParallel Manipulators, New
Developments 374
inthevicinityofthesingularpositionsandusingtheregularinversedynamicequations
elsewhere.Deploymentmotionsof2and3dofplanarmanipulatorsareanalyzedto
illustrate the proposed approach (Ider, 2004; Ider, 2005). 2.
Inverse dynamics and singular positions
Consideranndegreeoffreedomparallelrobot.Letthesystembeconvertedintoanopen-treestructurebydisconnectingasufficientnumberofunactuatedjoints.Letthedegreeof
freedomoftheopen-treesystembem,i.e.thenumberoftheindependentloopclosure
constraints in the parallel manipulator be m-n. Let[ ]1,...,Tm =
denote the joint variables of the open-tree system and[ ]1,...,Tnq
q = qthe joint variables of the actuated joints. The m-n loop
closure equations, obtained by reconnecting the disconnected
joints, can be written as 1( ,..., ) 0i m = =1,..., - i m n(1) and
can be expressed at velocity level as Gij j =0=1,..., - i m
n=1,..., j m(2) where G
iijj=.Arepeatedsubscriptindexinatermimpliessummationoveritsrange.
Theprescribedend-effectorCartesianvariables,ix (t ) =1,..., i n
representthetasksofthe non-redundant manipulator. The relations
between the joint variables due to the tasks are 1( ,..., )i m if x
==1,..., i n(3) Equation (3) can be written at velocity level as
Pij j ix = =1,..., i n=1,..., j m(4) where P iijjf=. Equations (2)
and (4) can be written in combined form, = h(5) where T TT G P =
whichisanm m matrixand T T = h x 0 .Thederivativeof equation (5)
gives the acceleration level relations, = + h (6) The dynamic
equations of the parallel manipulator can be written as TT G = M Z
T R(7) www.intechopen.com Singularity Robust Inverse Dynamics of
Parallel Manipulators 375 whereMisthem m
generalizedmassmatrixandRisthevectorofthegeneralized Coriolis,
centrifugal and gravity forces of the open-tree system,is the( ) 1
m- n vector of the joint forces at the loop closure joints, T is
the1 nvector of the actuator forces, and each row of Z is the
direction of one actuator force in the generalized space. If the
variable of the jointwhichisactuatedbytheithactuatoris k
,thenfortheithrowofZ,1ikZ= and 0ijZ =for=1,..., j m ( j k ).
Combining the terms involving the unknown forcesand T, one can
write equation (7) as T= A M R(8) where them m matrix TAand the1
mvectorare TT T G = A Z(9) and T T T = T(10)
Theinversedynamicsolutionofthesysteminvolvesfirstfinding, and
fromthe kinematic equations and then finding(and hence T) from
equation (8). Fortheprescribedx(t),canbefoundfromequation(6),
fromequation(5)and can
befoundeitherfromthepositionequations(1,3)orbynumericalintegration.However
duringtheinversekinematicsolution,singularitiesoccurwhen0 =
.Atthese configurations,theassignedx
cannotingeneralbereachedbythemanipulatorsince,in
equation(3),avectorhlyingoutsidethespacespannedbythecolumnsof
cannotbe produced and consequently the manipulator loses one or
more degrees of freedom.
Singularitiesmayalsooccurwhilesolvingfortheactuatorforcesinthedynamicequation
(8),when0 = A
.Foreachdifferentsetofactuators,Zhencethesingularpositionsare
different. Because this type of singularity is associated with the
locations of the actuators, it
iscalleddrivesingularity(oractuationsingularity).Atadrivesingularitytheassigned
cannot in general be realized by the actuators since, in equation
(8), a right hand side vector
lyingoutsidethespacespannedbythecolumnsof TA
cannotbeproduced,i.e.the
actuatorscannotinfluencetheend-effectoraccelerationsinstantaneouslyincertain
directions and the actuators lose the control of one or more
degrees of freedom. (The system
cannotresistforcesormomentsincertaindirectionsevenifallactuatorsarelocked.)The
actuator forces become unboundedly large unless consistency of the
dynamic equations are guaranteed by the specified trajectory. Let
Gu bethe( ) ( ) m- n m- n matrixwhichiscomposedofthecolumnsof G
that correspond to the variables of the unactuated joints.
Since1ikZ=and0ijZ =forj k , the drive singularity condition0 = Acan
be equivalently written as Gu0 = . In the literature the singular
positions of parallel manipulators are mostly determined using the
kinematic expression between qandxwhich is obtained by eliminating
the variables www.intechopen.comParallel Manipulators, New
Developments 376
oftheunactuatedjoints(Sefrioui&Gosselin,1995;Danialietal,1995;Alici,2000;Ji,2003;
DiGregorio, 2001; St-Onge & Gosselin, 2000), + = J Kxq 0(11)
References(Sefrioui&Gosselin,1995;Danialietal,1995;Ji,2003)namethecondition
0 = J asTypeIsingularityandthecondition0 = K
TypeIIsingularity.Andin
reference(DiGregorio,2001)theyarecalledinverseproblemsingularityanddirect
problem singularity, respectively. Since it shows the lost
Cartesian degrees of freedom, the condition0 = shown above
corresponds to0 = J . For the drive singularity, equation (2) can
be written as Gu u Ga= q(12) where u isthevectorof
thejointvariablesof theunactuatedjointsand Ga isthematrix composed
of the columns of Gassociated with the actuated joints. Since after
finding ufromeqn(12)onecanfindhandhencex
fromeqn(5)directly,thedrivesingularity condition0 = A (i.e. Gu0 =
)givenaboveisequivalentto0 = K .Itshouldbenoted
thattheidentificationofthesingularconfigurationsasshownhereiseasiersince
elimination of the variables of the passive joints is not
necessary. 3. Consistency conditions and modified
equationsAtthemotionplanningstageoneusuallytriestoavoidsingularpositions.Thisisnot
difficult as far as inverse kinematic singularities are concerned
because they usually occur at the workspace boundaries (DiGregorio,
2001). In this paper it is assumed thatalways has
fullrank,i.e.thedesiredmotionischosensuchthatthesystemnevercomestoaninverse
kinematicsingularposition. Ontheotherhand,drive
singularitiesusuallyoccurinside the workspace and avoiding them
restricts the functional workspace. It is therefore important to
devisetechniquesforpassingthroughthesingularpositionswhilethestabilityofthe
controlforcesismaintained.Tothisend,equation(8)mustbemadeconsistentatthe
singularposition.Inotherwords,sincetherowsof TA
becomelinearlydependent,the
samerelationmustalsobepresentbetweentherowsoftherighthandsidevector
( M R), so that it lies in the vector space spanned by the columns
of TA . 3.1 Consistency conditions and modified equations when
rank(A) becomes m-1
Atadrivesingularity,usuallyrankofAbecomesm-1.Letatthesingularpositionthesth
row of TAbecome a linear combination of the other rows of TA . T
Tsj p pjA A =1,..., p m =( ) p s , 1,..., j m =(13) where p
arethelinearcombinationcoefficients(whichmaydependalsoon i ).Notice
thatonlythoserowsof TA
whichareassociatedwiththeunactuatedjointscanbecome
www.intechopen.com Singularity Robust Inverse Dynamics of Parallel
Manipulators 377 linearlydependent,hence p
correspondingtotheactuatedjointsarezero.Thenforthe rows of equation
(6) one must have sj j p pj j sj j s p pj j pA A M R M R = T T(
)(14) Substitution of equation (13) into equation (14) yields sj j
s p pj j pM R M R = ( )(15)
Equation(15)representstheconsistencyconditionthat j
shouldsatisfyatthesingular position.Since j
areobtainedfromtheinversekinematicequations(6),thetrajectoryx must
be planned in such a way to satisfy equation (15) at the drive
singularity. Otherwise an
inconsistenttrajectorycannotberealizedandtheactuatorforcesgrowwithoutboundsas
the drive singularity is approached. Time derivative of equation
(14) is sj p pj j sj p pj p pj j sj p pj jA A A A A M M + =
T T T T T( ) ( ) ( ) sj p pj p pj j s p p p pM M M R R R + + + (
)(16)
Now,becauseequation(13)holdsatthesingularposition,thereexistsaneighborhoodin
which the first term in equation (16) is negligible compared to the
other terms. Therefore in that neighborhood this term can be
dropped to yield sj p pj p pj j sj p pj jA A A M M = T T T( ) ( )sj
p pj p pj jM M M + ( )s p p p pR R R + + (17) Equation (17) is the
modified equation that can be used to replace the s th row of
equation (8) or any other equation in the linearly dependent set.
3.2 Consistency conditions and modified equations when rank(A)
becomes r , find (hence T) from equation (8). 7.Sett t t = + . If
the final time is reached, stop. Otherwise continue from step 3. 4.
Case studies 4.1 Two degree of freedom 2-RRR planar parallel
manipulator
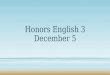
TheplanarparallelmanipulatorshowninFigure1has2degreesoffreedom( 2 n
= ).
ConsideringdisconnectionoftherevolutejointatP,thejointvariablevectoroftheopen-chain
system is[ ]T1 2 3 4 = . The joints at A and C are actuated, i.e.[
]T1 2 = q .
TheendpointPisdesiredtomakeadeploymentmotions(t)alongastraightlinewhose
anglewithx-axisis330o = ,startingfrominitialposition0.431 moPx =
,1.385 moPy = . The time of the motion is1 s T =and its length
is2.3 m L = in the positive s sense. Figure 1. Two degree of
freedom 2-RRR planar parallel manipulator. The moving links are
uniform bars. The fixed dimensions are labelled as or AC = , 1r AB
= , 2r CD = , 3r BP = and 4r DP = .Thenumericaldataare1.75mor = , 1
2 3 41.4m r r r r = = = = , 1 26 kg m m = =and 3 44kg m m = = . The
loop closure constraint equations at velocity level are G= 0 where
s 2143xyoP431PA DC singular position 2www.intechopen.comParallel
Manipulators, New Developments 380 1 1 3 13 2 2 4 24 3 13 4 241 1 3
13 2 2 4 24 3 13 4 24Gr s r s r s r s r s r sr c r c r c r c r c r
c + = + (28) Heresini is = ,cosi ic = ,sin( )ij i js = + ,cos( )ij
i jc = + .TheprescribedCartesian motion of the end point P, x can
be written as ooP PP Px s t x ty s t y t+ = = + ( ) sin ( )( ) cos
( )x(29) Then the task equations at velocity level are P= x , where
1 1 3 13 3 131 1 3 13 3 130 00 0Pr s r s r sr c r c r c = + (30)
The mass matrix M and the vector of the Coriolis, centrifugal and
gravitational forces R are 11 1322 2413 3324 440 00 00 00 0M MM MM
MM M = M(31) where
2 22 1 311 1 3 1 1 3 3( )3 3r rM m m r r r c = + + + ,23 1 3 313
3( )3 2r r r cM m = + , 2333 33rM m = 2 22 2 422 2 4 2 2 4 4( )3 3r
rM m m r r r c = + + + ,24 2 4 424 4( )3 2r r r cM m = + , 2444
43rM m =(32) and 1 1 13 1 3 3 3 1 3 1 1 1 3 1 1 3 132 2 212 1 13 1
3 3 1 3 3 13 2 2 21 1 134 2 4 4 4 2 4 2 2 2 4 2 2 4 242 2 22 1 144
2 4 4 2 4 4 242 2( ) ( )( ) ( )m r r s m g r c mg r c r cRm r r s
mg r c RRm r r s mg r c mg r c r cRm r r s mg r c + + + + = = + + +
+ R
(33) Sincethevariablesoftheactuatedjointsare 1 and 2
,thematrixZcomposedofthe actuator direction vectors is 1 0 0 00 1 0
0 = Z(34) Then the coefficient matrix of the constraint and
actuator forces, TAis www.intechopen.com Singularity Robust Inverse
Dynamics of Parallel Manipulators 381 1 1 3 13 1 1 3 132 2 4 24 2 2
4 24 T3 13 3 134 24 4 241 00 10 00 0r s r s r c r cr s r s r c r cr
s r cr s r c + + = A(35) Thedrivesingularitiesarefoundfrom0 = A as
1 3 2 4sin( ) 0 + = ,i.e.asthe positions when points A, B and D
become collinear. Hence, drive singularities occur inside
theworkspaceandavoidingthemlimitsthemotionintheworkspace.Definingapathfor
the operational point P which does not involve a singular position
would restrict the motion to a portion of the workspace where point
D remains on one side of the line joining A and D. In fact, in
order to reach the rest of the workspace (corresponding to the
other closure of the closed chain system) the manipulator has to
pass through a singular position. When the end point comes
to0.80mds L = = , 1 3 +becomes equal to 2 4 + + , hence a
drivesingularityoccurs.Atthispositionthethirdrowof TA becomes 3 4/
r r timesthe
fourthrow.Then,forconsistencyofequation(8),thethirdrowoftherighthandsideof
equation (8) should also be 3 4/ r rtimes the fourth row. The
resulting consistency condition that the generalized accelerations
must satisfy is obtained from equation (15) as 3 3 331 1 24 2 33 3
44 4 3 44 4 4r r rM M M M R Rr r r + = (36) Hence the time
trajectory s(t) of the deployment motion should be selected such
that at the drive singularity the generalized accelerations satisfy
equation (36).An arbitrary trajectory that does not satisfy the
consistency condition is not realizable. This is illustrated by
considering an arbitrary third order polynomial for( ) s thaving
zero initial andfinalvelocities,i.e. 2 32 33 2( )L t L tT Ts t =
.Thesingularitypositionisreachedwhen 0.48s t = . The actuator
torques are shown in Figure 2. The torques grow without bounds as
the singularity is approached and become infinitely large at the
singular position. (In Figure 2 the torques are out of range around
the singular position.)For the time function s(t), a polynomial is
chosen which satisfies the consistency condition at the drive
singularity in addition to having zero initial and final
velocities. The time dTwhen
thesingularpositionisreachedandthevelocityoftheendpointPat dT ,( )P
dv T canbe arbitrarily chosen. The loop closure relations, the
specified angle of the acceleration of P and
theconsistencyconditionconstitutefourindependentequationsforauniquesolutionof
, 1,..., 4ii =
at the singular position. Hence, using iand i
at dT , the acceleration of P at dT ,( )P da T
isuniquelydetermined.Consequentlyasixthorderpolynomialisselected
where(0) 0, s = (0) 0, s =( ) , s T L = ( ) 0, s T =( ) ,d ds T L =
( ) ( )d P ds T v T =and( ) ( )d P ds T a T =. dTand( )P dv Tare
chosen by trial and error to prevent any overshoot in s ors . The
values usedare0.55 sdT = and( ) 3.0 m/sP dv T = ,yielding 2( ) 18.2
m/sP da T = .s(t)soobtainedis given by equation (37) and shown in
Figure 3. www.intechopen.comParallel Manipulators, New Developments
382 2 3 4 5 6( ) 30.496 154.909 311.148 265.753 81.318 s t t t t t
t = + +(37) Figure 2. Motor torques for the trajectory not
satisfying the consistency condition: 1. T1, 2. T2
Furthermore,evenwhentheconsistencyconditionissatisfied, TA
isill-conditionedinthe vicinityofthesingularposition,hence
cannotbefoundcorrectlyfromequation(8). Deletion of a linearly
dependent equation in that neighborhood would cause task violations
due to the removal of a task. For this reason the modified equation
(17) is used to replace the
dependentequationintheneighborhoodofthesingularposition.Themodifiedequation,
which relates the actuator forces to the system jerks, takes the
following form. r r r rA A A A M M M Mr r r r + = + T T T T 3 3 3
331 41 1 32 42 2 31 1 24 2 33 3 44 44 4 4 4( ) ( ) 3 3 331 1 24 2
33 3 44 4 3 44 4 4r r rM M M M R Rr r r + + + (38) The coefficients
of the constraint forces in eqn (38) are T T 331 41 3 1 3 13 3 2 4
244( ) ( )rA A r c r cr = + + (39a) T T 332 42 3 1 3 13 3 2 4 244(
) ( )rA A r s r sr = + + (39b) which in general do not vanish at
the singular position if the system is in motion.
Oncethetrajectoryischosenasabovesuchthatitrendersthedynamicequationstobe
consistentatthesingularposition,thecorresponding i , i
and i
areobtainedfrom inverse kinematics, and when there is no
actuation singularity, the actuator torques 1Tand
www.intechopen.com Singularity Robust Inverse Dynamics of Parallel
Manipulators 383 2T(along with the constraint forces 1 and 2 ) are
obtained from equation (8). However in
theneighborhoodofthesingularposition,equation(22)isusedinwhichthethirdrowof
equation (8) is replaced by the modified equation (38). The
neighborhood of the singularity where equation (22) is utilized is
taken as 1 3 2 4180 1o o + < = . The motor torques
necessarytorealizethetaskareshowninFigure4.Atthesingularpositionthemotor
torquesarefoundas 1138.07Nm T = and 230.66Nm T =
.Totestthevalidityofthe
modifiedequations,whenthesimulationsarerepeatedwith0.5o = and1.5o =
,no significant changes occur and the task violations remain less
than 410m. Figure 3. Time function satisfying the consistency
condition. 4.2 Three degree of freedom 2-RPR planar parallel
manipulator
The2-RPRmanipulatorshowninFigure5has3degreesoffreedom(n=3).Choosingthe
revolutejointatDfordisconnection(amongthepassivejoints)thejointvariablevectorof
theopenchainsystemis[ ]T1 1 2 2 3 = ,where 1AB = and 2CD = .The
link dimensions of the manipulator are labelled asa AC = ,b BD = ,c
BP =andPBD = . The position and orientation of the moving platform
is[ ]T3 P Px y = xwhere Px , Pyare the coordinates of the
operational point of interest P in the moving platform. The
velocity level loop closure constraint equations are G= 0, where 1
1 1 2 2 2 31 1 1 2 2 2 3sin cos sin cos sincos sin cos sin cosGbb =
(40) The prescribed position and orientation of the moving
platform,( ) t xrepresent the tasks of the manipulator. The task
equations at velocity level are P= xwhere
www.intechopen.comParallel Manipulators, New Developments 384 1 1 1
31 1 1 3sin cos 0 0 sin( )cos sin 0 0 cos( )0 0 0 0 1Pcc + = + (41)
Figure 4. Motor torques for the trajectory satisfying the
consistency condition: 1. T1, 2. T2. Figure 5. 2-RPRplanar parallel
manipulator. Letthejointswhosevariablesare 1 1 2, and
betheactuatedjoints.Theactuatorforce vectorcanbewrittenas[ ]T1 1 2T
F F = T where 1T isthemotortorquecorrespondingto s 54G 2G5G1G13x
yoP 12A C www.intechopen.com Singularity Robust Inverse Dynamics of
Parallel Manipulators 385 1 ,and 1F and 2F
arethetranslationalactuatorforcescorrespondingto 1 and 2 ,
respectively.Consideradeploymentmotionwheretheplatformmoveswithaconstant
orientation given as o3320 =and with point P having a trajectory
s(t) along a straight line whoseanglewithx-axisis o200 =
,startingfrominitialpositionm 0.800oPx = , m 0.916oPy =
(Figure5).Thetimeofthedeploymentmotioniss 1 T = anditslengthis m
1.5 L = . Hence the prescribed Cartesian motion of the platform can
be written as o3( ) ( ) sin( ) ( ) cos( )320ooP PP Px t x s ty t y
s tt + = = + x(42) The link dimensions and mass properties are
arbitrarily chosen as follows. The link lengths arem 1.0 AC a = =
,m 0.4 BD b = = ,m 0.2 BP c = = ,0 PBD = = .Themassesandthe
centroidal moments of inertia arekg12 m = ,kg21.5 m = ,kg32 m =
,kg41.5 m = ,kg51.0 m = , kgm210.05 I= ,kgm220.03 I= ,kgm230.05 I=
,kgm240.03 I=andkgm250.02 I= .The mass centerlocationsaregivenbym1
10.15 AG g = = ,m2 20.15 BG g = = ,m3 30.15 CG g = = , m4 40.15 DG
g = = ,m5 50.2 BG g = =and 50 G BD = = .
ThegeneralizedmassmatrixMandthegeneralizedinertiaforcesinvolvingthesecond
order velocity terms R are 11 1522 25334451 52 550 0 00 0 00 0 0 00
0 0 00 0M MM MMMM M M = M,12345RRRRR = R(43) where ijMand iRare
given in the Appendix. For the set of actuators considered, the
actuator direction matrix Z is 1 0 0 0 00 1 0 0 00 0 0 1 0 = Z(44)
Hence, TAbecomes 1 1 1 11 1T2 2 2 22 23 3sin cos 1 0 0cos sin 0 1
0sin cos 0 0 0cos sin 0 0 1sin cos 0 0 0 b b = A(45)
www.intechopen.comParallel Manipulators, New Developments 386 Since
2 2 3sin( ) b = A , drive singularities occur when 20 =or 2 3sin( )
0 = . Noting that 2
doesnotbecomezeroinpractice,thesingularpositionsarethosepositionswhere
points B, D and C become collinear. Hence, drive singularities
occur inside the workspace and avoiding them limits the motion
intheworkspace.Avoidingsingularpositionswhere 2 3n = ( 0, 1, 2,...)
n = would restrict the motion to a portion of the workspace where
point D is always on the same side of the line BC. This means that
in order to reach the rest of the workspace (corresponding to the
other closure of the closed chain system) the manipulator has to
pass through a singular position.WhenpointPcomestom 0.662ds L = =
,adrivesingularityoccurssince 2 becomesequal to 3 +
.Atthispositionthethirdandfifthrowsof TA becomelinearlydependentas
23 50T Tj jA Ab = ,1,..., 5 j = . The consistency condition is
obtained as below 2 233 2 51 1 52 1 55 3 3 5( ) M M M M R Rb b + +
= (46)
Thedesiredtrajectoryshouldbechoseninsuchawaythatatthesingularpositionthe
generalized accelerations should satisfy the consistency condition.
Ifanarbitrarytrajectorythatdoesnotsatisfytheconsistencyconditionisspecified,then
such a trajectory is not realizable. The actuator forces grow
without bounds as the singular
positionisapproachedandbecomeinfinitelylargeatthesingularposition.Thisis
illustrated by using an arbitrary third order polynomial for( ) s
thaving zero initial and final velocities,i.e. 2 32 33 2( )L t L tT
Ts t = .Thesingularityoccurswhens 0.46 t = .Theactuatorforces are
shown in Figures 6 and 7. (In the figures the forces are out of
range around the singular position.) Figure 6. Motor torque for the
trajectory not satisfying the consistency condition.
www.intechopen.com Singularity Robust Inverse Dynamics of Parallel
Manipulators 387 Figure 7. Actuator forces for the trajectory not
satisfying the consistency cond.: 1. F1, 2. F2.
Forthetimefunctions(t)apolynomialischosenthatrendersthedynamicequationstobe
consistent at the singular position in addition to having zero
initial and final velocities. The time dTwhen singularity occurs
and the velocity of the end point when dt T = ,( )P dv Tcan be
arbitrarily chosen. The acceleration level loop closure relations,
the specified angle of the accelerationofP(o200 =
),thespecifiedangularaccelerationoftheplatform 3( 0) =
and
theconsistencyconditionconstitutefiveindependentequationsforauniquesolutionof
, 1,..., 5ii = at the singular position. Hence, usingandat dT , the
acceleration of P at dT ,( )P da T
isuniquelydetermined.Consequentlyasixthorderpolynomialisselected
where(0) 0, s = (0) 0, s =( ) , s T L = ( ) 0, s T =( ) ,d ds T L =
( ) ( )d P ds T v T =and( ) ( )d P ds T a T =. Thevaluesusedfor dT
and( )P dv T ares 0.62 andm s 1.7 / respectively,yielding m s2( )
10.6 /P da T = . s(t) so obtained is shown in Figure 8 and given by
equation (47). 2 3 4 5 6( ) 20.733 87.818 146.596 103.669 25.658 s
t t t t t t = + +(47) Badchoicesfor dT and( )P dv T
wouldcauselocalpeaksins(t)implyingbackandforth motion of point P
during deployment along its straight line path.
However,evenwhentheequationsareconsistent,intheneighborhoodofthesingular
positions TA isill-conditioned,hence
cannotbefoundcorrectlyfromequation(8).This
problemiseliminatedbyutilizingthemodifiedequationvalidintheneighborhoodofthe
singular position. The modified equation (17) takes the following
form j jB Q = 1, 2 j =(48) where 2 21 31 51 51T T TB A A Ab b =
,2 22 32 52 52T T TB A A Ab b =
(49a) www.intechopen.comParallel Manipulators, New Developments
388 2 233 2 51 1 52 1 55 3 33 2 51 1 52 1( ) ( Q M M M M M M Mb b =
+ + + + 255 3 51 1 52 1 55 3) ( ) M M M Mb + + +
2 23 5 5R R Rb b + +
(49b) Figure 8. A time function that satisfies the consistency
condition.Oncethetrajectoryisspecified,thecorresponding ,
andareobtainedfrominverse
kinematics,andwhenthereisnoactuationsingularity,theactuatorforces
1T , 1F and 2F(andtheconstraintforces 1 and 2
)areobtainedfromequation(8).Howeverinthe
neighborhoodofthesingularity,Aisill-conditioned.Sotheunknownforcesareobtained
fromequation(22)whichisobtainedbyreplacingthethirdrowofequation(8)bythe
modifiedequation(48).Theneighborhoodofthesingularpositionwhereequation(22)is
utilized is taken aso o2 3180 0.5 + < = . The motor torques and
the translational actuator
forcesnecessarytorealizethetaskareshowninFigures9and10,respectively.Atthe
singularpositiontheactuatorforcesare Nm130.31 T = , N126.3 F = and
N21.61 F = .Thejoint displacements under the effects of the
actuator forces are given in Figures 11 and 12. To test
thevalidityofthemodifiedequationsinalargerneighborhood,whenthesimulationsare
repeated with o1 = , no significant changes are observed, the task
violations remaining less than 510m. 5. Conclusions A general
method for the inverse dynamic solution of parallel manipulators in
the presence
ofdrivesingularitiesisdeveloped.Itisshownthatatthedrivesingularities,theactuator
forcescannotinfluencetheend-effectoraccelerationsinstantaneouslyincertaindirections.
Hence the end-effector trajectory should be chosen to satisfy the
consistency of the dynamic www.intechopen.com Singularity Robust
Inverse Dynamics of Parallel Manipulators 389 equations when the
coefficient matrix of the drive and constraint forces, A becomes
singular.
Thesatisfactionoftheconsistencyconditionsmakesthetrajectorytoberealizablebythe
actuators of the manipulator, hence avoids the divergence of the
actuator forces. Figure 9. Motor torque for the trajectory
satisfying the consistency condition Figure 10. Actuator forces for
the trajectory satisfying the consistency condition: 1. F1, 2. F2
Toavoidtheproblemsrelatedtotheill-conditionoftheforcecoefficientmatrix,Ainthe
neighborhoodofthedrivesingularities,amodificationofthedynamicequationsismade
usinghigherorderderivativeinformation.Deletionofthelinearlydependentequationin
that neighborhood would cause task violations due to the removal of
a task. For this reason
themodifiedequationisusedtoreplacethedependentequationyieldingafullrankforce
coefficient matrix. www.intechopen.comParallel Manipulators, New
Developments 390 Figure 11. Rotational joint displacements: 1. 1,
2. 2. Figure 12. Translational joint displacements: 1. 1, 2. 2. 6.
References
Alc,G.(2000).Determinationofsingularitycontoursforfive-barplanarparallel
manipulators, Robotica, Vol. 18, No. 5, (September 2000) 569-575.
Daniali,H.R.M.;Zsombor-Murray,P.J.&Angeles,J.(1995).Singularityanalysisofplanar
parallelmanipulators,MechanismandMachineTheory,Vol.30,No.5,(July1995)
665-678. www.intechopen.com Singularity Robust Inverse Dynamics of
Parallel Manipulators 391
DiGregorio,R.(2001).Analyticformulationofthe6-3fully-parallelmanipulators
singularity determination, Robotica, Vol. 19, No. 6, (September
2001) 663-667.
Gao,F.;Li,W.;Zhao,X.;Jin,Z.&Zhao,H.(2002).Newkinematicstructuresfor2-,3-,4-,
and5-DOFparallelmanipulatordesigns,MechanismandMachineTheory,Vol.37,
No. 11, (November 2002) 1395-1411.
Gunawardana,R.&Ghorbel,F.(1997).PDcontrolofclosed-chainmechanicalsystems:an
experimental study, Proceedings of the Fifth IFAC Symposium on
Robot Control, Vol. 1, 79-84, Nantes, France, September 1997,
Cambridge University Press, New York. Ider, S.K. (2004).
Singularity robust inverse dynamics of planar 2-RPR parallel
manipulators,
ProceedingsoftheInstitutionofMechanicalEngineers,PartC:JournalofMechanical
Engineering Science, Vol. 218, No. 7, (July 2004) 721-730.
Ider,S.K.(2005).Inversedynamicsofparallelmanipulatorsinthepresenceofdrive
singularities, Mechanism and Machine Theory, Vol. 40, No. 1,
(January 2005) 33-44.
Ji,Z.(2003)Studyofplanarthree-degree-of-freedom2-RRRparallelmanipulators,
Mechanism and Machine Theory, Vol. 38, No. 5, (May 2003) 409-416.
Kong,X.&Gosselin,C.M.(2001).Forwarddisplacementanalysisofthird-classanalytic3-RPRplanarparallelmanipulators,MechanismandMachineTheory,Vol.36,No.9,
(September 2001) 1009-1018.
Merlet,J.-P.(1999).ParallelRobotics:OpenProblems,ProceedingsofNinthInternational
SymposiumofRoboticsResearch,27-32,Snowbird,Utah,October1999,Springer-Verlag,
London.
Sefrioui,J.&Gosselin,C.M.(1995).Onthequadraticnatureofthesingularitycurvesof
planarthree-degree-of-freedomparallelmanipulators,MechanismandMachine
Theory, Vol. 30, No. 4, (May 1995) 533-551. Appendix
TheelementsofMandRofthe2-RPRparallelmanipulatorshowninequation(41)are
given below, where im ,1,..., 5 i =are the masses of the links, iI
,1,..., 5 i =are the centroidal
momentsofinertiaofthelinksandthelocationsofthemasscenters iG
,1,..., 5 i = are indicated by 1 1g AG = , 2 2g BG = , 3 3g CG = ,
4 4g DG = , 5 5g BG =and 5G BD = . 2 2 211 1 1 1 2 1 2 2 5 1( ) M m
g I m g I m = + + + +(A1) 15 5 1 5 1 3cos( ) M m g = (A2) 22 2 3M m
m = +(A3) 25 5 5 1 3sin( ) M mg = (A4) 2 233 3 3 3 4 2 4 4( ) M mg
I m g I = + + +(A5) 44 4M m =(A6) 51 5 1 5 1 3cos( ) M m g = (A7)
www.intechopen.comParallel Manipulators, New Developments 392 52 5
5 1 3sin( ) M mg = (A8) 255 5 5 5M mg I = +(A9) 21 2 1 2 1 1 5 1 5
3 1 32 ( ) sin( ) R m g m g = +
m g m g m g + + +1 1 2 1 2 5 1 1[ ( ) ] cos(A10) 2 2 22 5 5 3 1
3 2 1 2 1 5 1 1 2 5 1cos( ) ( ) ( ) sin R mg m g m m m g = + +
(A11) 3 4 2 4 2 2 3 3 4 2 4 22 ( ) [ ( )] cos R m g mg m g g = +
+ (A12) 24 4 2 4 2 4 2( ) sin R m g mg = +
(A13) 25 5 5 1 1 1 3 1 1 1 3 3[2 cos( ) sin( ) cos( )] R mg g =
+ +
(A14) www.intechopen.comParallel Manipulators, New
DevelopmentsEdited by Jee-Hwan RyuISBN 978-3-902613-20-2Hard cover,
498 pagesPublisher I-Tech Education and PublishingPublished online
01, April, 2008Published in print edition April, 2008InTech
EuropeUniversity Campus STeP Ri Slavka Krautzeka 83/A 51000 Rijeka,
Croatia Phone: +385 (51) 770 447 Fax: +385 (51) 686
166www.intechopen.comInTech ChinaUnit 405, Office Block, Hotel
Equatorial Shanghai No.65, Yan An Road (West), Shanghai, 200040,
China Phone: +86-21-62489820 Fax: +86-21-62489821Parallel
manipulators are characterized as having closed-loop kinematic
chains. Compared to serialmanipulators, which have open-ended
structure, parallel manipulators have many advantages in terms
ofaccuracy, rigidity and ability to manipulate heavy loads.
Therefore, they have been getting many attentions inastronomy to
flight simulators and especially in machine-tool industries.The aim
of this book is to provide anoverview of the state-of-art, to
present new ideas, original results and practical experiences in
parallelmanipulators. This book mainly introduces advanced
kinematic and dynamic analysis methods and cuttingedge control
technologies for parallel manipulators. Even though this book only
contains several samples ofresearch activities on parallel
manipulators, I believe this book can give an idea to the reader
about what hasbeen done in the field recently, and what kind of
open problems are in this area.How to referenceIn order to
correctly reference this scholarly work, feel free to copy and
paste the following:S. Kemal Ider (2008). Singularity Robust
Inverse Dynamics of Parallel Manipulators, Parallel
Manipulators,New Developments, Jee-Hwan Ryu (Ed.), ISBN:
978-3-902613-20-2, InTech, Available
from:http://www.intechopen.com/books/parallel_manipulators_new_developments/singularity_robust_inverse_dynamics_of_parallel_manipulators