Embed Size (px)
Citation preview

Xow--
—-
ae
Parone,
MSC INTERNAL NOTE NO.LptfnOiE
PROJECT GEMINI
LOGIC AND EQUATIONS FOR REAL-TIME COMPUTATION OF ARRIVAL TIME
AT AN EQUATORIAL CROSSING, A SPECIFIED LONGITUDE,
A SPECIFIED RADIUS, AND APSIS POINTS
7
Prepared by: Loma Lue rag?Thomas Buckman
Prepared by: aaaStan Mafhn
Approved:areeaLe
Chief, Rendezvous Analysis Branch
Approved:
John P. MayerChief, Migbion Planning and Analysis
Division
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION
MANNED SPACECRAFT CENTER
HOUSTON, TEXASDecember 14, 1964

TABLE
Section
1. Introduction
2. Discussion of Subroutine
3. Discussion of Subroutine
4. Discussion of Subroutine
5. Discussion of Subroutine
6. Required Inputs
7. Subroutine Outputs
APPENDIX
OF CONTENTS
STLO
STEQ
STCIR
STAP
Le Detailed Flow Charts
II. Definition of Flow Chart Symbols
rhco
fF
WW
10

-l-
1. Introduction
The purpose of this internal note is to discuss the development of four
real-time computer program subroutines which are used in the General Pur-
pose Maneuver Processor (GPMP) and the Agena Corrective Maneuver Processor
(ACMP). The subroutines discussed herein are:
o STLO - Determinesthe next time of arrival of an orbiting vehicle at some
specific input longitude
o STEQ - Determines the time of arrival of an orbiting vehicle at the next
equatorial crossing point
o STCIR - Determines the next time of arrival of an orbiting vehicle at
some specific input radius
o STAP - Determines the time of arrival of an orbiting vehicle at the next
true apogee or perigee
These subroutines form a part of the ACM and GPM Processors and are utilized
to establish the time at which certain maneuvers should be scheduled.
ie Discussion of Subroutine STLO
Subroutine SILO requires the input of a set of vehicle orbital elements for
a given time and the desired longitude (A). Since the longitude of ascending
node (hy) of the input vector will be based on an inertial reference, it
mst be changed to an earth fixed reference. This is accomplished by sub-
tracting the earth rotation (wt). The distance along the equator (VY) be-
tween the present earth fixed ascending node (nh) and the desired longitude (0)
is found by subtracting (h,) from (0). A negative distance along the equator
would be meaningless here, so 2x mst be added to the above result if Qa = h,)
is negative. The argument of latitude of the desired longitude crossing
(U,) is computed with the use of a spherical triangle that includes the incli-
nation (I;) and the proper equatorial distance (v). An initial time of arrival
estimate (At) is made by applying the vehicle mean motion (n) to the difference
between the argument of latitude of thedesired longitude (U,) and the present
argument of latitude of the vehicle (U;). However, this time estimate will
not be entirely correct because the earth rotational rate will affect the

~-2.
actual time of travel between the present position and the desired longi-
tude. This discrepancy is initially corrected by adding the earth rotation
(war) to the desired longitude (XY. A more accurate time estimate is then
computed using the "adjusted" longitude (,,). When the longitude has been properly
adjusted to account for earth rotation, the AEG Subroutine is called and the
initial vector is updated to a time equal to the initial time plus the latest
At estimate. The argument of latitude of the vehicle at this time is checked .
against the argument of latitude of the adjusted input longitude. If the
difference between these two parameters indicates a time difference greater
than an input tolerance, a new At is computed and the AEG is called again.
This iteration continues until a convergence on UL is attained. The time
that permits this convergence will then be the desired time of arrival at the
specific longitude (\) and is denoted as tron:
3. Discussion of Subroutine STEQ
Subroutine STEQ begins the search for the next equatorial crossing with a
set of vehicle orbital elements for a given time. The value of the vehicle
argunent of latitude (U,) at this time is checked against x to determine if
the next equatorial crossing will be the ascending or descending mode. If the
upcoming node is ascending, the argument of latitude of the next crossing point
will equal 2x. If the upcoming node is descending, the desired argument of lati-
tude will equal x. A first estimate for the time of arrival is made by applying
the vehicle mean motion (ny) to the difference between the argument of latitude
of the vehicle and the argument of latitude of the next crossing point. The
110 in the flow charts. This time
estimate is used as the initial estimate in an iteration loop using the AEG
Subroutine. The AEG is called and the vector is updated to the time estimate.
If the vehicle argument of latitude at this time is not within a pre-set tole- '
rance of the value Ki40 a new time estimate is computed and the iteration loop
is entered again. The time corresponding to the argument of latitude that per-
mits a convergence in the iteration loop will then be the desired time of equa-
torial crossing (tag)
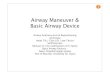
4. Discussion of Subroutine STCIR
Subroutine STCIR requires the input of a set of vehicle orbital elements for
a given time and the desired radius of circularization (Rotp)- This subroutine
later parameter is denoted by the value K

« 3 «
begins its search for Ror at the time of the input elements. An initial
calculation of the true anomaly of the vehicle at the desired radius is
made using the following Keplerian relationship:
a(1 - e°) -RrR CIR) (1)fie cos”CIR |
This true anomaly (f,) is compared to the true anomaly of the present posi-
tion (fz) and an initial time of arrival estimate is computed by applying
the mean motion to the difference between these parameters. Since the
computed true anomaly is not a unique solution due to the existence of
two Ror positions in the orbit, a further test mst be performed to insure
the use of the next desired radius point. The AEG is updated to the initial
time estimate, and the true anomaly of the resulting vector is noted. A
more accurate computation of the desired true anomaly is made using equation
(1) with the updated elements. This computed true anomaly is again compared
with the actual true anomaly at the updated position and if the difference
between them is greater than a pre-set tolerance, a new time estimate is :
calculated and entered in the iteration loop. In the course of iterating
on the proper true anomaly, it is possible for a radius (Rorp) that initially |
exists in the orbit to become non-existent in the present orbit due to drag.
The presence of this situation is revealed when the value of cos (f,) becomes
greater than one. Should this situation occur the subroutine sets an error
flag (Ki9,) and returns to the point where it was called. The time estimate
that produces convergence on the computed true anomaly will be the proper time
of arrival at the input radius and is denoted as torr:
5. Discussion of Subroutine STAP
The STAP Subroutine requires the input of a set of vehicle orbital elements
for some time and a Ki00 flag which determines which Apsis point is desired
(Ki09 = 0, Apogee —- Kyo, = 15 Perigee). A first estimate of the time of
arrival at the next desired apsis point is made by comparing the present
mean anomaly to either x or 2x, depending on the Koo flag setting. If -
the apsis point desired is apogee, a check is made to determine if the apogee

~4&.
point has already been passed in the present orbit. If this is the case,
then the present mean anomaly is compared to 3 rather than x to obtain
the proper time estimate. The AEG is called and the present vector is
updated to the initial time estimate. The mean anomaly at the updated
position is then compared to the proper multiple of x (Apogee -- x, Peri-
gee --2x). If the difference between these values is greater than a pre-
set tolerance, than a new time estimate is calculated. This updated time
estimate is then re-entered in the iteration loop. The time that permits
convergence at the proper mean anomaly will be the correct time of arrival
at the apsis and will be denoted as taps
6. Required Inputs
The input that is required for each subroutine is divided into two major
categories: constant input and variable input. The constant input is also
subdivided further into three groups: 1) input that will not change after
three weeks prior to launch, 2) input from three weeks prior until the
program is loaded, and 3) input required after the launch.
This input is listed in the following sections:
3.1 STLO
3.2 STEQ
3.3 STCIR
3.4 STAP
3.5 AEG

3.1 Input for STLO
I. Constant Input
a. Category
1. 15 O52 Kigy> Kyoo? Bios
2. 66, St
3. None
II. Variable Input
h, t, h, U, gn
TIT. Output
t e, I, g, h, £,; R, U, &, nLon? %
IV. Constant and Variable Input Required for:
AEG/DRAG
3.2 Input for STEQ
I. Constant Input
a. Category
lL.
2. 6t
3. None
II. Variable Input
t, & u,n
III. Output
te? a, e, I, g, h, &, R, I"
IV. Constant and Variable Input Required for:
AEG/DRAG virsnitees
neiessi
ltinaapy
apitinsoneneniteen
hitibi
tbiime
annsn
ibitib
siiiom
iilani
n:Si
kimm
cwen
eens
t

3.3 Input for STCIR
I;
IT.
IIL.
Iv.
Input
Le
it.
Tir.
Constant Input
a. Category
1. tT, Koy
2. &t
3. None
Variable Input
Rotp? ts 8 Us &, on
Output
torr? a, e, I, g, h, 2, R, u
Constant and Variable Input Required for:
AEG/DRAG
for STAP
Constant Input
a. Category
1. 7
2. 6b
3. None
Variable Input
Ki00? t, 4, g, n
Output ‘
tap? a, e, I, g, h, £2, R, u, & n
Constant and Variable Input Required for:
AEG/DRAG

de
-7-
3.5 INPUT FOR AEG
I. CONSTANT INPUT
a. Category
1. my Uy Oy Jy, HL Ky Ry, Rooper Ssgs At, pj(j =1, 12),eas Ky
2. A, C,
3. None
II. VARIABLE INPUT
Ky» Ko, Kz, Ly, Ly, W, t, a, 0, I, h, hy 1
III. OUTPUT
Bes Ops Ios Bes Ho» les Des g; h, Ly, Uy, By r, h", I"
IV. CONSTANT AND VARIABLE INPUT REQUIRED FOR:
DRAG - x, u, Os Ja Hy Kos Ro? Roorp? Caos Ato» ej(j =1, 12), 1»
Ko» Ap» Cp» a» ©, g, (easing), (ecosg), L, u, Wye Bs Bs Y's Cys Co,
Crs C309 By tp» e", L", at
nti
main
ienn
amma
bhan
edtcee

-~8-
7. Subroutine Outputs
The outputs for the subject subroutines are as follows:
STLO - troy» a» > I, gh, 2, R, U, Bn
STEQ - tag? a, e, I, g, h, £, R, I"
STCIR - torr? a, e, I, g, h, £, R, U
STAP - tap» @ e, I, g, h, 4, R, U, gn

APPENDIX I
Detailed Flow Charts

NeerE
eR
EeCeEeEEII
EELTSSS
enSO
aSaas
PTT
rt
Se
aa
eyae
ve
“SUBROUTINE STLO
V
CONSTANT ANPUTS
We = O25CS6245 vES/MIN
TT= B.1415927
Kia - C.Kie2z =O,
Ries 7O.
&EQSr> C]OOR RAD,
St = aol MIN.
|V
VARIABLE INPUTS
= LONG(TUISE INRQLESTICN
\NITARW VECTOR
Gx. Tr 495 hy Ax, %)
Urs 9po Me

SET,
N= X+2TT
he NWS CES INED
AS THE DISTANCE
BLONYG THE BQLUATOR
IRBETWEENY THE Peewe’T
ACTH FIXED ASTEDG NS
Nove Che) AND THE
|||
DESIREDLonaiTunE(Ay)
wv

Ps
wee
we
irais LOGIi2n PTHS10 WES
THE PEPER RLAPRALUT
OF TNE LONGITUDE (AY)tn ORDER To Sue“Tet leetRIC AL
Te LAWS FCR APG SM ENT“Gh LATITUBE CULL) OF
THE BEES .PED LonaiTupe,, THe Kio ies FLAGS'APE CHECKED LATERUS THE SUBROUTINE"Te PeePteer ADJUSTj THIS Com poTenp uU,
ser |Vartt-v7
Kiezzt
cose == SIN(I)* coe @~
sINC = [{$-(cosc)*
SINCU)= SIN(Y) JSINC
cos(u)= Ji- ant!
U_ = TAN Gu Wi) /osws) 4.4
Page Jos feaetd
ists!

[Ser | Se
fe egi
Yo Ut 1 i a
Le
‘fe AN AEG AS USED [rear eweeaeeytN WHICH THE ARGUMENT
OF LATITUDE \S
TRUNCATED AT 3o0,THERE IG A POeseiLitr !CR LOSING THE CcomemaT |
RELATIONSHIP BETWEENU, € Ur AFTER THE
EARTH ROTATION TERMWe At) 1S ADE To
aX THIS COMODITION
Witt BE CRITICAL ONLY |
WHEN “THE UL AND THE
ARGUMENT OF LATITWO S|
OF THE PRESENT | POZE (Tion (Uz) 1S VERY
CLese€ TO 320°
THE Kiog FLAG WILLPREVENT THE ABove
CONDITION WITH A SHUNTOF THE TEsT ON THE
DIFFERENCE BETWEEN
L£ Up ONCE THEPELATIONSHIP OF THIS
ESTABLISHED . 7 ($4——— -PAPAMETERS HAS BEEN
THE POUTIAL
APPL:TATIONS Se THE
TIME To Agee ATTHE A, (IS COM SITES
BY USING THE
THE PRESENT ARS CLIENT
OF LATITUDE (Jy) <F
THE VEHICLE AND Tre
| NReSIMENT OF
| LATITUDE. (U,) oFdy
DiFEERENCEL BSTWStH |
baw
D4

ee
SINCS THe GAeCTHWILL ROTATE DURINGTHE PERIOD WHEN THEVEHICLE IS ADVANCINGTOWARD THE UL, THEINPUT LONGITUDE CX)MUST BE ADJUSTEDWITH AN EARTHROTATION TREK(ae"AL
VTS GORRSC
THE UL COMPUTED
(HN THe AGove
ITERATION (5
ITERATED YUPon)
Te DETER MiIt>bS
T TIMeOF ARRIVAL AT THE
ARS SOMENT OF LATTTUOGOF THe DESIRED
LoenmGiTweo&
eeoare eee
THRE WuITIAL TIME °
ESTIMATE Gt) MUSTBE AD)LSTED To
REFLECT THEEARTH ROTATION
TERM. THIS \S '
Done BY PEPLACING
THE INITIAU Lone iTuDeOQ) with THEADSVUSTED (-ONGITOOE(Ag) ANOS RE-EUTERING
THE Loaic TO CONPUTE
ate
*Gen')
PAGE, PAGE
s iis |
iiiSea
sectet
aect
mcne
t

AtOd
S\SovwAS2ens3a
AxvanarBwit
BOBANWIUSAASSty
CPLBipStigBBGS34!Tafto)
TyanildyBOLO
aoe2uoOaF
\fsaoodyas&(TBeSo)=SMD
SLOGNI3Taviava
a :L26Siv~i"Sat!
“WIATOTO=3e
Sloan)INyvisnoo| {\
BNILcoedansdvlsS

Fond
ar—*_3S
—
LAS)
2(Cu+*b/ly-H2_,~~
rcae-enenetomrommee:
V
V+"
a—<35:
(u+*by\7¥-d
“2olWoLaNBiuvadn
SAY1Vv>
—a
+9BIONAMCLBw
wCehlUMasaadgGisd7
AVAISSALyWherryaoBwiiBOUVTAAIAAGLdOOcreLiv2sall

SIC IESASS OTINE
CONSTANT IN Pot!
St= 0-01 MIN,
W-+ 31415927Keg. = Ory
VARIABLE INPUTS
Reve — RADIOS, DESIMWEL
VECTOR AT TIME te
oO92, hz, f+ yey
ty Geo We
Piecr ESTIMATE OF VTe OS AOYMATSY OF
Le
(“CF)-Rere\“ je. Reve Z
= =I (OQJLwee ernrion 1°? Ter cos (Ponsr int ORRIT
= U.-3,| '4
j]

»
YO s INDORSED THAT TROE 49.9116
\ OF MEAT DESImeD Kh ft,
| Ponor IS DUSEWU
- oY
fee"‘z) Z- + ze Ae
an’=) TOT Le
> “ s|
- i .
pee | .
Gen.>
CALL AEG2h V \catVEcToR/S}
>»6
(fase2mfy)4t= (9, + nz) } :
-e*jy-foe) (Cagees) ERPS. FAS?FE cue VDESIPED Khon.
f= Ve- elo .°*] DOES 1ST EGET° IN O@EIT ‘
Hf= COS(cosff,.)
ITESZATIOD LOOP THO DSTEteHVe
TIME OF ARRIVAL AT DESIRED
RADIUS WITHIO & TIME AGEJoe PCS
Tovewance Sr 2 2

“~
©STE SISROa
DETERMINES THE
ARGUMENT OF
LATITUDE OF THENEXT EQUATORIAL
CROSSING POT
FIeSr ESTIMATE. oF
TIME TO NExTEQUATORIAL CROSSING
+CONSTANT INPUTS
St= 0-01 MIN.
. TF B14iso27
“vesehiceVARIABLE(NDUTE
| VECTOR AT Time t-
(25,25, Ti, Qryhr Ke a,|
|
Vir gon
SCS dee eR < Sarr
anKune = 27
ahKure = T_
tjAt= CKito —Up/ (4,+ ny) '
im 4

2)1.2 Sstyi"4]aes)
:tt
|}
|
é
it
rhMANUISSOUD
“SeOP3OBABH
2MOMaesOOBWI
at)3UVaALaAg
C5awe]Nolveaat
NYSrTttioesSIRL

7Sererew
100
= 106 =
APPENDIX II
Definition of Flow Chart Symbols
- semimajor axis
- eccentricity
- inclination
- argument of perigee
- longitude of ascending node
- mean anomaly
- time of vector
- argument of latitude
- secular rate of change of argument of perigee
- mean motion constant
- true anomaly
- input longitude
- distance along the equator between the present earth-fixed as-
cending node and the desired longitude
- earth-fixed longitude of ascending node
- initial setting of A in iteration loop
- computed argument of latitude of the desired longitudinal crossing
- cosine of wedge angle between longitude meridian and vehicle path
102 ~ flags to establish correct quadrant of longitude A)
- time interval used in iteration loop
- flag to set proper relationship between the present argument of
latitude and argument of latitude of desired longitude
- change in input longitude due to earth rotation factor
- angular tolerance in iteration loop
- "adjusted" desired longitude dve to earth rotation factor
- option to search for either apogee or perigee

f - true anomaly of point of desired radiusCIR
Kino - flag to determine next node (ascending or descending)
r" - mean inclination
Koh - error flag in STCIR - desired point does not still exist inorbit
tron - time of arrival at specific longitude
tag - time of arrival at next equatorial crossing
torr - next time of arrival at specific radius
tap - time of arrival at next apogee or perigee
Subscripts
I - initial
F - vector at desired time