Embed Size (px)
DESCRIPTION
Part IV: Blade Geometry Optimization. Philippe Giguère Graduate Research Assistant. Department of Aeronautical and Astronautical Engineering University of Illinois at Urbana-Champaign. Steady-State Aerodynamics Codes for HAWTs Selig, Tangler, and Giguère - PowerPoint PPT Presentation
Citation preview

1
Part IV: Blade Geometry Optimization
Philippe Giguère
Graduate Research Assistant
Steady-State Aerodynamics Codes for HAWTsSelig, Tangler, and Giguère
August 2, 1999 NREL NWTC, Golden, CO
Department of Aeronautical and Astronautical EngineeringUniversity of Illinois at Urbana-Champaign

2
Outline• Approaches to Optimization• Blade Geometry Optimization• Optimization Methods for HAWTs• PROPGA

3
Approaches to Optimization• Iterative Approach
– Use direct or inverse design method
– Designer knowledge important
– Inverse design can lead directly to an optimum blade for maximum energy (variable-speed HAWTs)

4
• Direct Optimization
– Many optimization techniques available– Nature of problem dictates the optimization method
Optimum DesignDesign Parametersand Constraints
OptimizationMethod
“Black Box”
AnalysisMethod

5
•“Black Box” Warning!– An optimization method will take advantage of the weaknesses of the analysis tool(s) and problem
formulation– Optimization technique must be implemented with care– Know your analysis tool(s)

6
Blade Geometry Optimization• Many Design Variables (continuous and discrete)
– Chord and twist distributions– Blade pitch– Airfoils– Turbine configuration and control systems
• Competing Objectives– Maximum energy– Minimum cost
• Airfoil data not always smooth (“noisy” problem)• Complex problem often with many local optima• Need a robust optimization technique

7
Optimization Methods for HAWTs• Garrad Hassan (Jamieson and Brown, 1992)
– Simplex method for aerodynamic design– Optimize chord and twist for maximum energy
• University of Athens (Belessis et al., 1996)– Genetic algorithm for aerodynamic design with limited structural constraints– Parameterized airfoil data
• Risø (Fuglsang and Madsen, 1996)– Sequential linear programming with method of feasible directions for
aerodynamic design– Structural, fatigue, noise, and cost considerations

8
PROPGA• Description
– Genetic-algorithm based optimization method – Optimize blade geometry given set of constraints
• Possible design variables– chord and twist distributions, blade pitch, rotor diameter, number of blades, etc.
• Typical constraints– Operating conditions, rated power, airfoil distribution, steady-blade loads, and all fixed
design variables
– Uses PROPID to evaluate the blade designs and achieve inverse design specifications
– Initially developed to optimize blades for max. energy

9
• What are Genetic Algorithms (GAs)?– Robust search technique based on the principle of the survival of the fittest – Work with a coding of the parameters
• Simplified example: blade chord & pitch is 101001
– Search from sub-set (population) of possible solutions over a number of generations
– Use objective function information (selection)– Use probabilistic transition rules based on and genetic operations
• crossover: 111|1 & 000|0 gives 1110 & 0001• mutation: 1 to 0 or 0 to 1 (small probability)• etc.

10
• PROPGA Flowchart
Step 2Formation of
Initial Population
Step 3Analysis of Each
Individual of Population
Step 4Creation of Mating PoolReproduction Operator
Step 5Crossover Operator
Step 6Mutation Operator
New PopulationOffsprings
Is this the lastgeneration?
Yes
No
Optimization ProcessComplete
Step 1Coding of theParameters

11
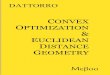
• Blade Design Example (Maximize Energy Capture)– Evolution of the chord and twist distributions
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
N orm alized D istance A long B lade R adius (r/R )
0.0
0.1
0.2
Nor
mal
ized
cho
rd(c
/R)
2
1
1050
100
-10
0
10
20
30T
wis
t (de
g)
1
2
10
50100
G eneration 1
G eneration 2
G eneration 10
G eneration 50
G eneration 100

12
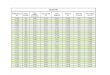
– History of the energy production• Population of 100 blades over 100 generations
0 10 20 30 40 50 60 70 80 90 100
G enerations
0
5,000
10,000
15,000
20,000G
ross
Ann
ual E
nerg
y P
rodu
ctio
n(k
Wh/
year
)H istory of best b lade design
H istory of average b lade design

13
• Blades Designed with PROPGA/PROPID– Tapered/twisted blade for the NREL Combined
Experiment Rotor – WindLite 8-kW wind turbine– Replacement blade for the Jacob’s 20-kW HAWT– Twist distribution of the replacement blade for the
US Windpower 100-kW turbines

14
• New Features (Under Development)– Airfoil selection– Advanced GA operators– Structural modeling– Weight/cost modeling for main components
• Rotor, hub, drivetrain, and tower
– Minimize cost of energy– Multi-objectives (get tradeoff curves)– Paper at the ASME Wind Energy Symposium, Reno, NV, January 2000