Embed Size (px)
Citation preview

1
Part V. Time and Frequency Characterization of Signals and Systems
Topics to be covered
a. Introduction b. The magnitude phase representation of the Fourier transform
c. The magnitude phase representation of the frequency response of LTI systems
d. First-order and second order continuous and discrete time systems e. Time and frequency domain analysis
V.1. Introduction In system design, there are both time domain and frequency domain considerations. It is important to relate the time-domain and frequency domain characteristics and trade-offs.
V.2. The magnitude phase representation of the Fourier transform The magnitude-phase representation of the continuous-time Fourier transform )( jwX is
)()()( jwXjejwXjwX ∠=
Similarly the magnitude-phase representation of the discrete-time Fourier transform )( jweX is )()()(
jweXjjwjw eeXeX ∠= Remarks: The same essential points apply both to continuous time system and to the discrete time case.
)( jwX decomposes the signal )(tx into a sum of complex exponentials at different frequencies. 2)( jwX may be interpreted as the energy-density spectrum of )(tx .
The magnitude )( jwX describes the basic frequency content of a signal. The phase angle )( jwX∠ , on the other hand, does not affect the amplitudes of the individual frequency components. It provides us with information concerning the relative phase of these exponents

2
Remarks: in some instances, phase distortion may be important (images), whereas in others it is not (audio signal)
V.3. The magnitude phase representation of the frequency response of LTI systems
H(jw)X(jw) Y(jw)
The transform of the output of an LTI system )( jwY is related to the transform of the input
)( jwX by the equation: )()()( jwXjwHjwY =
Similar for discrete time system:
)()()( jwjwjw eXeHeY =
In continuous time:
Magnitude: )()()( jwXjwHjwY = and phase: )()()( jwXjwHjwY ∠+∠=∠
)( jwH∠ is typically referred to as the phase shift of the system. V.3.1) Linear and Nonlinear phase Consider the continuous time LTI system with frequency response:
0)( jwtejwH −= The system has the magnitude of 1)( 0 == − jwtejwH and linear phase 0)( wtjwH −=∠ The system with this frequency response characteristic produce an output that is simply a time shift of the input )()( 0ttxty −= In discrete-time case, the effect of linear phase is similar to that in the continuous time case
][][)( 00 nnxnyeeH jwnjw −=⇒= −
Remarks: 1) Linear phase shifts lead to simple changes in signal. The phase slope yields the size of the time shift. 2) Nonlinear phase shift may lead to considerably different from the input signal.

3
V.3.1) Group Delay The concept of delay can be naturally and simply extended to include nonlinear phase characteristics. Consider the input )(tx whose Fourier transform is close to zero outside a small band of frequencies at 0ww = . Since the band is very small, we can accurately approximate the phase of the system in the band with the linear approximation
wajwH −−=∠ φ)( So that
jwaj eejwHjwXjwY −−= φ)()()( Remarks: the approximate effect of the system on the Fourier transform of this narrowband input consists of the magnitude shaping corresponding to , manipulating by an overall constant complex factor φje− and multiplication by a linear phase term jwae− corresponding to a time delay of a seconds. This time delay is referred to as the group delay at 0ww = , as it is the effective common delay experienced by the small band or group of frequencies centered at 0ww = . Definition: group delay The group delay at each frequency equals the negative of the slope of the phase at that frequency; i.e, the group delay is defined as
( ) { })( jwHdwdw ∠−=τ
Remarks: The concept of group delay applies directly to discrete-time systems as well.
Example 5.1 Consider a linear-phase discrete-time LTI system with frequency response ( )jweH and real impulse response ][nh . The group delay function for such a system is defined as
( ) { })( jweHdwdw ∠−=τ
Where )( jweH∠ has no discontinuouities. Suppose that, for this system,
( ) 22/ =πjeH , 0)( 0 =∠ jeH , and 22
=⎟⎠⎞
⎜⎝⎛πτ
Determine the output of the system for each of the following inputs:
a) ⎟⎠⎞
⎜⎝⎛ n
2cos π
b) ⎟⎠⎞
⎜⎝⎛ +
427sin ππ n
Solution: a) the signal ⎟⎠⎞
⎜⎝⎛ n
2cos π can be broken up into a sum of two complex exponentials
( ) njenx 2
1 2/1][π
= and ( ) njenx 2
2 2/1][π
−= from the given information, we know that when
( ) njenx 2
1 2/1][π
= passes through the given LTI system, it experiences a delay of 2 samples. Since the system has a real impulse response, it has an even group delay function. Therefore, the

4
complex exponential ( ) njenx 2
2 2/1][π
−= with frequency 0w− also experiences a group delay of 2
samples. The output ][ny of the LTI system when the input is ][][][ 21 nxnxnx += is therefore
=−+−= ]2[2]2[2][ 21 nxnxny ( )⎟⎠⎞
⎜⎝⎛ − 2
2cos2 nπ
b) The signal ⎟⎠⎞
⎜⎝⎛ +
427sin ππ n is the same as ⎟
⎠⎞
⎜⎝⎛ −−
42sin ππ n . This signal may once again be
broken up into complex exponentials of frequency 2π and
2π
− . We will similarly to get
the output ( ) ⎟⎠⎞
⎜⎝⎛ −=⎟
⎠⎞
⎜⎝⎛ +−=−+−=
43
27sin2
42
27sin2]2[2]2[2][ 21
ππππ nnnxnxny
V.3.2) Log magnitude and phase plots Remarks: The advantage to display the magnitude of the Fourier transform on logarithmic amplitude is following:
)(log)(log)(log)()()( jwXjwHjwYjwXjwHjwY +=⇒= )()()( jwXjwHjwY ∠+∠=∠
Remarks: specific logarithmic amplitude scale used is in unit of 10log20 , referred to as decibels (dB). dB Magnitude 0 1 -20 0.1 20 10 6 2 For continuous-time system, it is also common and useful to use a logarithmic frequency scale. Bode plot: Plots of )(log20 10 jwH and )( jwH∠ versus ( )w10log are referred to as Bode plots.
Remarks: If )(th is real, then )( jwH is an even function of w and )( jwH∠ is an odd function of w . Thus the plots for negative w are superfluous and can be obtained immediately from the plots for positive w . Normally we only plot the frequency response characteristics versus
( )w10log for 0>w
Example 5.2 Bode plot for 10
1+jw
and 10
1+jwe

5
-60
-50
-40
-30
-20M
agni
tude
(dB)
10-1
100
101
102
103
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec) Continuous time Bode plot
-21
-20.5
-20
-19.5
-19
Mag
nitu
de (d
B)
10-1
100
101
-6
-4
-2
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Discrete time Bode plot

6
V.3.3) Time domain properties of ideal frequency selective filters.
Ideal Continuous low pass filter: ⎩⎨⎧
>≤
=c
c
wwww
jwH01
)(
Impulse response
ttwth c
πsin)( =
w-wc wc
H(jw)
w-wc wc
H(ejw)
π π π2 π2
Ideal discrete time low pass filter: ⎩⎨⎧
<<≤
=πww
wweH
c
cjw
01
)(
Impulse response
tnnwnh c
πsin][ =
Figures of continuous and discrete time impulse response Figures of continuous and discrete time step response
7
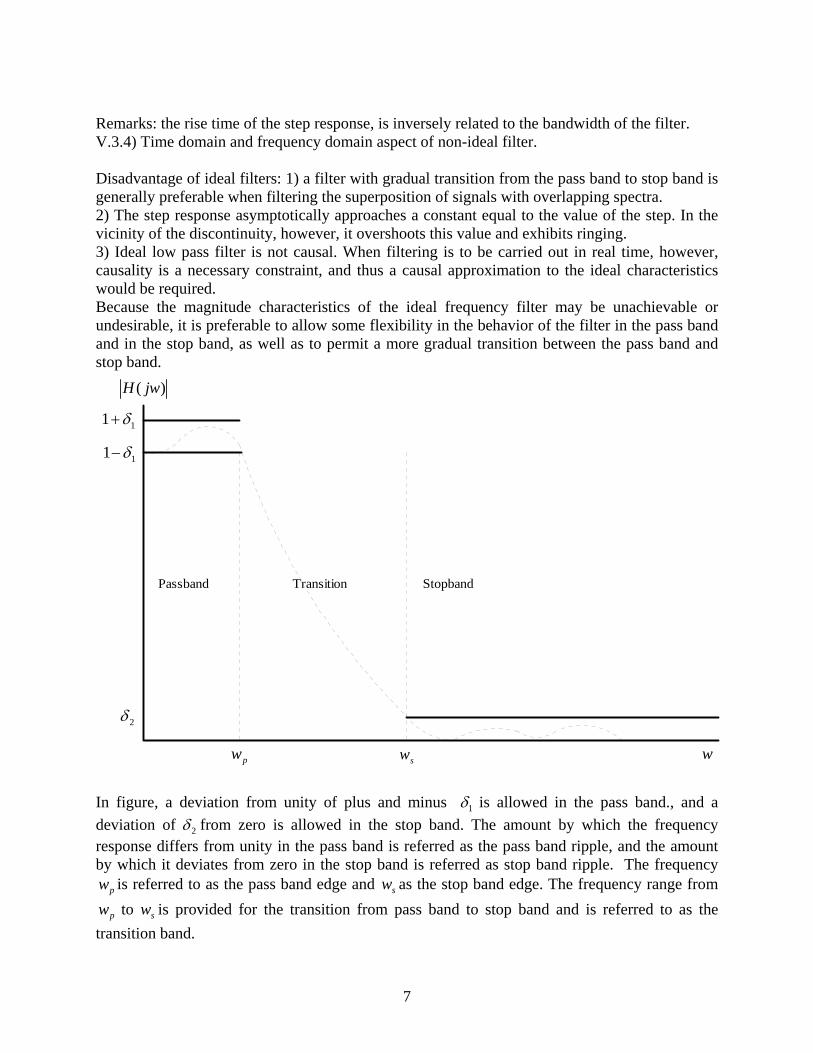
Remarks: the rise time of the step response, is inversely related to the bandwidth of the filter. V.3.4) Time domain and frequency domain aspect of non-ideal filter. Disadvantage of ideal filters: 1) a filter with gradual transition from the pass band to stop band is generally preferable when filtering the superposition of signals with overlapping spectra. 2) The step response asymptotically approaches a constant equal to the value of the step. In the vicinity of the discontinuity, however, it overshoots this value and exhibits ringing. 3) Ideal low pass filter is not causal. When filtering is to be carried out in real time, however, causality is a necessary constraint, and thus a causal approximation to the ideal characteristics would be required. Because the magnitude characteristics of the ideal frequency filter may be unachievable or undesirable, it is preferable to allow some flexibility in the behavior of the filter in the pass band and in the stop band, as well as to permit a more gradual transition between the pass band and stop band.
pw sw w
2δ
11 δ−
11 δ+
)( jwH
Passband Transition Stopband
In figure, a deviation from unity of plus and minus 1δ is allowed in the pass band., and a deviation of 2δ from zero is allowed in the stop band. The amount by which the frequency response differs from unity in the pass band is referred as the pass band ripple, and the amount by which it deviates from zero in the stop band is referred as stop band ripple. The frequency
pw is referred to as the pass band edge and sw as the stop band edge. The frequency range from
pw to sw is provided for the transition from pass band to stop band and is referred to as the transition band.

8
Similar definitions apply to discrete-time low pass filters, as well as to other continuous and discrete time frequency selective filters. To control time-domain behavior, specifications are frequently imposed on the step response of a filter. There are rT or 1rT , pT , sT , sse
Example: 5.3 Consider an ideal high pass filter whose frequency response is specified as
⎩⎨⎧
<>
=c
c
wwww
jwH01
)(
a) Determine the impulse response t
twth c
πsin)( = for this filter.
b) As cw is increased, does )(th get more or less concentrated about the origin? c) Determine )0(s and )(∞s , where )(ts is the step response of the filter.
Solution: a) note that )(1)( 0 jwHjwH −= , where t
twthwwww
jwH c
c
c
πsin)(
01
)( 00 =↔⎩⎨⎧
>≤
=
Therefore, t
twtthtth c
πδδ sin)()()()( 0 −=−=
b) As cw is increased, )(th gets more concentrated about the origin. c) Note that the step response is given by
)()()(*)()()(*)()( 00 tstuthtutututhts −=−==
We know that 21)0(0 =s and 1)(0 =∞s

9
Therefore 21
211)0()0()0( 0 =−=−= ++ sus and 011)()()( 0 =−=∞−∞=∞ sus
V.4. First-order and second order continuous and discrete time systems
V.4.1) first order system differential equation:
)()()( txtydt
tdy=+τ
Frequency response is: 1
1)(+
=τjw
jwH
And the impulse response is )(1)( / tueth t τ
τ−=
Step response is [ ] )(1)(*)()( / tuetuthts t τ−−== Parameter τ is the time constant of the system, and it controls the rate at which the first order system responds. Example 5.4 Sketch the bode plot, and plot the impulse response and step response of following
system: 15
1)(+
=jw
jwH
-40
-30
-20
-10
0
Mag
nitu
de (d
B)
10-2
10-1
100
101
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)

10
0 5 10 15 20 25 300
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2Impulse Response
Time (sec)
Ampl
itude
0 5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Step Response
Time (sec)
Ampl
itude

11
V.4.2) Second order continuous-time system
)()()(2)( 22 txwtywdt
tdywndt
tdynn =++ ξ
Frequency response:
( ) ( )12
12
)( 222
2
+⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛=
++=
nn
nn
n
wwj
wjwwjwwjw
wjwH
ξξ
We see that the frequency response is the function of nw
w . Thus changing nw is essentially
identical to a time and frequency scaling. The parameter ξ is referred as the damping ratio and the parameter nw as the undamped natural frequency. Case 0: 0<ξ ? Case 1: 1=ξ , critical damped case
( ) ( ) ( ))()(
2)( 2
2
2
22
2
tutewthwjw
wwjwwjw
wjwH twn
n
n
nn
n n−=→+
=++
=
Step response : [ ] )(1)( tutewets tw
ntw nn −− −−=
Case 2: 1>ξ , over damped. Impulse response is the difference between two decaying exponentials. Case 3: 10 << ξ , under damped system. Use partial fraction expansion of the form
( )[ ] )(1sin1
)()( 2
221
tutwewthcjw
Mcjw
MjwH n
twn
n
ξξ
ξ
−−
=⇒−
−−
=−
Step response: )(1)(*)()(21
21
tuce
ceMtuthts
tctc
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡−+==

12
0 1 2 3 4 5 6 7 8 9 10-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
ωnt
y(t)/ω
n
ζ=0.1,0.25,0.5,1.0
Impulse response
0 2 4 6 8 10 120
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
ωnt
y(t)/ω
n
ζ=0.1,0.25,0.5,1.0
Step response

13
Modern Control Systems: ELEVENTH EDITIONRichard C. Dorf and Robert H. Bishop 0-13-227028-5
Bode plot

14
V.4.3) First and second order discrete time system
a) First order discrete time system First order difference equation: ][]1[][ nxnayny =−−
With 1<a , frequency response : jwjw
aeeH −−
=1
1)(
Impulse response: ][][ nuanh n=
Step response: ][1
1][*][][1
nua
anhnunsn
−−
==+
The magnitude and phase of the first order system are:
( )21
2 cos21
1)(waa
eH jw
−+=
⎥⎦⎤
⎢⎣⎡−
−=∠ −
wawaeH jw
cos1sintan)( 1
Remarks: the magnitude of the parameter a plays a role similar to that of the time constant τ in the continuous time first order system. a determines the rate at which the first order system responds.
1) The impulse response decays sharply and the step response settles quickly for a small.
2) For a near to 1, these responses are slower. 3) When 0<a , step response exhibits both overshoot of its final value and ringing. 4) For frequency response, for 0>a , the system attenuates high frequencies. i.e., )( jweH is
smaller for w near π± than it is for w near 0. 5) For frequency response, for 0<a , the system amplifies high frequencies and attenuates
low frequencies. i.e., )( jweH is smaller for w near π2± than it is for w near π± .
Figures of frequency response and impulse response and step response see next two pages

15
-505
Mag
nitu
de (d
B)
10-1
100
101
01020
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 1 2 3 4 5 6 7 8 9 10-1
0
1Impulse Response
Time (sec)
Ampl
itude
0 1 2 3 4 5 6 7 8 9 10
0.70.80.9
Step Response
Time (sec)
Ampl
itude
a=0.25
-505
Mag
nitu
de (d
B)
10-1
100
101
01020
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 1 2 3 4 5 6 7 8 9 10-1
0
1Impulse Response
Time (sec)
Ampl
itude
0 1 2 3 4 5 6 7 8 9 10
0.70.80.9
Step Response
Time (sec)
Ampl
itude
a=-0.25

16
-200
20
Mag
nitu
de (d
B)
10-3
10-2
10-1
100
101
-90-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 5 10 15 20 25 30 35 400
0.5
1Impulse Response
Time (sec)
Ampl
itude
0 5 10 15 20 25 30 35 40 450
5
10Step Response
Time (sec)
Ampl
itude
a=7/8
-200
20
Mag
nitu
de (d
B)
10-1
100
101
04590
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 5 10 15 20 25 30 35 40-1
0
1Impulse Response
Time (sec)
Ampl
itude
0 5 10 15 20 25 30 35 40 450
0.5
1Step Response
Time (sec)
Ampl
itude
a=-7/8

17
b) Second order discrete time system
( ) ][]2[]1[cos2][ 2 nxnyrnyrny =−+−− θ With 10 << r and πθ ≤≤0 The frequency response for this system is
( )
( )[ ] ( )[ ]jwjjwj
wjjwjw
ereere
erereH
−−−
−−
−−=
+−=
θθ
θ
111
cos211)( 22
Case 1: 0≠θ or π , the two factors in the denominator of )( jweH are different, and a partial fraction expansion yields,
( )[ ] ( )[ ] ( )[ ] ( )[ ]jwjjwjjwjjwjjw
ereB
ereA
ereereeH −−−−−− −
+−
=−−
= θθθθ 11111)(
Where , θ
θ
sin2 jeA
j
= ,θ
θ
sin2 jeB
j−
=
Impulse response is ( ) ( )[ ] ( )[ ] ][sin
1sin][][ nunnrnureBreAnh nnjnj
θθθ +
=+= −
Step response: ( ) ( ) ][1
11
1][*][][11
nure
reBre
reAnhnuns j
nj
j
nj
⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛
−−
+⎟⎟⎠
⎞⎜⎜⎝
⎛
−−
== −
+−+
θ
θ
θ
θ
Case 2: 0=θ or π , the two factors in the denominator of )( jweH are same,
0=θ πθ = Frequency response [ ]21
1)(jw
jw
reeH
−−= [ ]21
1)(jw
jw
reeH
−+=
Impulse response
( ) ][1][ nurnnh n+= ( )( ) ][1][ nurnnh n−+=
Step response ( ) ( ) ( ) ( ) ][1
1111
22 nurnr
rrr
rr
nn⎥⎦
⎤⎢⎣
⎡+
−+
−−
− ( ) ( )( ) ( ) ( )( ) ][1
1111
22 nurnr
rrr
rr
nn⎥⎦
⎤⎢⎣
⎡−+
+−−
++ Remarks: 1) The rate of decay of ][nh is controlled by r . The closer the r is to 1, the slower the decay in ][nh . Similarly, the value of θ determines the oscillation. With 0=θ , there is no oscillation,
πθ = there is rapid oscillation. Figures of frequency response and impulse response and step response

18
468
Mag
nitu
de (d
B)
10-2
10-1
100
101
-20-10
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 1 2 3 4 5 6 7 8 9 100
1
2Impulse Response
Time (sec)
Ampl
itude
0 1 2 3 4 5 6 7 8 9 102
2.5Step Response
Time (sec)
Ampl
itude
r=0.1, 0=θ
5.56
6.5
Mag
nitu
de (d
B)
10-2
10-1
100
101
-101
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 1 2 3 4 5 6 7 8 9 10-2
0
2Impulse Response
Time (sec)
Ampl
itude
0 1 2 3 4 5 6 7 8 9 101.95
2
2.05Step Response
Time (sec)
Ampl
itude
r=0.1,
2πθ =
468
Mag
nitu
de (d
B)
10-1
100
101
01020
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 1 2 3 4 5 6 7 8 9 10-2
0
2Impulse Response
Time (sec)
Ampl
itude
0 1 2 3 4 5 6 7 8 9 101.6
1.8
2Step Response
Time (sec)
Ampl
itude
r=0.1, πθ =

19
-200
20
Mag
nitu
de (d
B)
10-2
10-1
100
101
-90-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 5 10 15 20 250
1
2Impulse Response
Time (sec)
Ampl
itude
0 5 10 15 20 250
5
10Step Response
Time (sec)
Ampl
itude
r=0.5, 0=θ
05
10
Mag
nitu
de (d
B)
10-2
10-1
100
101
-200
20
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 1 2 3 4 5 6 7 8 9 10-2
0
2Impulse Response
Time (sec)
Ampl
itude
0 2 4 6 8 10 12
1.6
1.8
2Step Response
Time (sec)
Ampl
itude
r=0.5,
2πθ =
-200
20
Mag
nitu
de (d
B)
10-1
100
101
04590
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 5 10 15 20 25-2
0
2Impulse Response
Time (sec)
Ampl
itude
0 5 10 15 20 250
1
2Step Response
Time (sec)
Ampl
itude
r=0.5, πθ =

20
-500
50
Mag
nitu
de (d
B)
10-3
10-2
10-1
100
101
-180-90
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 10 20 30 40 50 600
5
10Impulse Response
Time (sec)
Ampl
itude
0 10 20 30 40 50 600
100
200Step Response
Time (sec)
Ampl
itude
r=0.9, 0=θ
02040
Mag
nitu
de (d
B)
10-2
10-1
100
101
-900
90
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 5 10 15 20 25 30 35 40 45-2
0
2Impulse Response
Time (sec)
Ampl
itude
0 10 20 30 40 50 600
1
2Step Response
Time (sec)
Ampl
itude
r=0.9,
2πθ =
-500
50
Mag
nitu
de (d
B)
10-1
100
101
090
180
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
0 10 20 30 40 50 60-10
0
10Impulse Response
Time (sec)
Ampl
itude
0 10 20 30 40 50 60-5
0
5Step Response
Time (sec)
Ampl
itude
r=0.9, πθ =

21
It is also possible to have consider the second order systems having factors with the real coefficients
( )( )jwjwjw
ededeH −− −−
=21 11
1)( , where 1d and 2d are both real numbers with 11 <d , 12 <d
( ) ][]2[]1[][ 2121 nxnyddnyddny =−+−+−
( )( ) ( ) ( )jwjwjwjwjw
edB
edA
ededeH −−−− −
+−
=−−
=2121 1111
1)( ,
Where 21
1
dddA−
= ,12
2
dddB−
=
Thus [ ] ][][ 21 nuBdAdnh nn += , which is the sum of two decaying real exponentials.
][1
11
1][*][][2
12
1
11 nu
ddB
ddAnhnuns
nn
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−−
+⎟⎟⎠
⎞⎜⎜⎝
⎛−−
==++
V.5. Time and frequency domain analysis Example





























