Embed Size (px)
Citation preview

Dariusz JaniszewskiPoznan University of Technology
Particle Filter Approachfor Permanent Magnet Synchronous Motor
State Estimation
Abstract. The paper describes an observer for a permanent magnet synchronous motor based on Particle Filter techniques. Based on introducedtheory an observer of shaft position, speed and load torque is proposed. Preliminary research show good properties of proposed estimation structure.
Streszczenie. W artykule przedstawiono obserwacje zmiennych stanu silnika synchronicznego o magnesach trwałych przy wykorzystaniu techniki fil-tracji czasteczek. W oparciu o przedstawiona teorie zaproponowano obserwator połozenia wału, predkosci i momentu obciazenia czesci mechanicznejnapedu. Poczatkowe badania symulacyjne pokazuja dobre własciwosci zaproponowanej struktury estymacji.(Wykorzystanie techniki filtru czasteczkowego do estymacji stanu silnika synchronicznego o magnesach trwałych)
Keywords: permanent magnet synchronous motor, sensorless control, observers, Particle FilterSłowa kluczowe: silnik synchroniczny o magnesach trwałych, sterowanie bezczujnikowe, obserwatory , filtr czasteczkowy
doi:10.12915/pe.2014.06.11
IntroductionFiltering is the problem of estimating the states (also pa-
rameters or hidden variables) of a system as a set of ob-servations becomes online. To solve this problem necessaryis modeling the system and the noises in system and me-asurements. The resulting models show complex nonlineari-ties and noise distribution, often real non-Gaussian, some-times excluding analytical approaches. The right algorithmto solve the problem of estimaton state with nonlinearitiesis nonlinear family of Kalman Filters, include Extended andUnscented [1, 2, 3, 4]. These solutions bases on knowingmodel of system, with linearizion – EKF or with aproxima-tion of Gaussian noise distribution – UKF. Theres is someextension to use EKF and UKF for parameter and disturban-ces estimation[5, 6, 7]. Another popular solutions strategy forsolve filtering problem is to use Sequential Monte Carlo me-thods, known as Particle Filter[8, 9]. These methods allow forcomplete representation of the posteriori distribution of sta-te variables, so that any statistical tools are easy computed.They can therefore handle with any nonlinearities and com-plex distributions.
Permanent Magnet Synchronous Motor are widely usedin industrial high precision and high dynamic mechatro-nics drives. Their inherent high torque to inertia ratio, smallsizes and enhanced dynamic performances are predomi-nant features[10, 11, 12]. Systems called sensorless ha-ve the potential to get rid of any mechanical sensors pla-ced on the machine shaft, usually of position and velocitymeasurements[11, 13]. Some method have been developedin order to obtain mechanical quantities of PMSM and induc-tion motors[11, 14, 15, 16, 13, 17, 18, 19]. Interesting issueis drive parameter estimation estimation[20]. In simple mo-del of electromechanicals one axis drive system, the naturalstate variables are shaft position and speed with disturbancewhich is load torque[6, 7]. So it is possible to obtain informa-tion about position, speed and torque.
The paper presents widely approach of Particle Filter ap-ply for Permanent Magnet Synchronous Motor state estima-tion.
Mathematical model of PMSMThe general mathematical model of system in statistical
approach can be broken into state transition and state me-
asurements models:
p(xt|xt−1, ut
)(1)
p(yt|xt
)(2)
where xt ∈ Rnx denotes the states (hidden variables or/and
parameters) of the system in time t, and yt∈ R
ny observa-tions. The states follow a first order Markov chain processand the observations are assumed to be independent giventhe states. Based on this approach the model can be expres-sed as follows:
(3) xt = f(xt−1, ut, vt−1
),
(4) zt = h (xt, nt) ,
where ut ∈ Rnu denotes the input observations, vt ∈ R
nx
and nt ∈ Rny are noises for process and measurements. In
state space approach above equations can be presented as:
(5) xt = Ft(xt−1)xt−1 +Bt(xt−1)ut + vt−1 ,
(6) zt = Ht(xt)xt + nt ,
Mathematical model of PMSM concerns in three mainparts: electrical network, electromechanical torque produc-tion and third is mechanical subsystem[12]. The stator ofPMSM and Induction Motor are similar. The rotor consistspermanent magnets, there are a modern rare-earth magnetswith high strength.
During investigations some simplified assumptions aremade: saturation is neglected, inducted electromagnetic for-ce is sinusoidally, eddy currents and hysteresis losses areneglected, no dynamical dependencies in air-gap, no rotorcage. With these assumptions, the rotor oriented dq electri-cal network equations of PMSM can be described as:
(7) ud = Rsid + Lddiddt
− pωrLqiq ,
(8) uq = Rsiq + Lqdiqdt
+ pωrLdid + pωrΨm .
where: ud, uq are dq axis voltages, id, iq are dq axis currents,Ld, Lq are dq axis inductances, Rs is stator resistance, and
56 PRZEGLAD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 90 NR 6/2014

Ψm is magnetic flux produced by permanent magnets placedon rotor.
The value of produced electromagnetic torque is givenby equation:
(9) Te =3
2· p [Ψm − (Lq − Ld) id] · iq ,
where p is number pole pairs, and fraction 32 stems from fra-
me conversion: perpendicular stator αβ into rotor dq.Drive dynamics can be describes as:
(10) Te − Tl = Jdωr
dt,
where Tl is load torque and J is summary moment of inertiaof kinematic chain.
Based on (9) and (10) movement equation is:
(11)dωr
dt=
p
J
[3
2(Ψm − (Lq − Ld) id) · iq
]− Te
J.
Rotor position – γ can be described by derivative equ-ation of rotational speed:
(12)dγ
dt= p · ωr .
For this work there are true assumption that load torqueTl is invariable in a narrow interval:
(13)d
dtTl ≈ 0 .
Model can be described as classical discrete functionmodel, with sample time Ts:
or as state space model:System matrix Ft is:
(14) Ft(xt) =⎡⎢⎢⎢⎢⎢⎣
1− Ts · Rs
LdTs · ωr
Lq
Ld0 0 0
−Ts · ωrLd
Lq1− Ts · Rs
Lq−Ts · Ψm
Lq0 0
0 T1 0 0 −Ts · 1J
0 0 Ts 1 00 0 0 0 1
⎤⎥⎥⎥⎥⎥⎦,
where:
T1 = Ts · 32
p
J[Ψf − (Lq − Ld) id]
Output matrix Ht is a rotating matrix – Clark/Parck transfor-mation:
(15) Ht(xt) =
[cos γ − sin γ 0 0sin γ cos γ 0 0
],
and matrix Bt:
(16) Bt(xt) =
⎡⎢⎢⎢⎢⎣
Ts · 1Ld
cos γ Ts · 1Ld
sin γ
−Ts · 1Lq
sin γ Ts · 1Lq
cos γ
0 00 00 0
⎤⎥⎥⎥⎥⎦ .
Particle filteringThe main assumption of Particle Filtering find sources in
Monte Carlo simulation and importance sampling[22, 23, 24,8, 9]. In Monte Carlo simulation, set of weighted particles, ob-tain from posteriori distribution, can be used to map integralsto discrete sum, the posteriori can be approximated as:
(17) p(x0:t|y1:t
)=
1
N
N∑i=1
δ(x(i)0:t − x0:t
)
where the random samples {x0:t; i = 1...N}, are computedfrom posteriori distribution and δ(d·) denotes the Dirac deltafunction. So expectations of the form:
(18) E (gt(x0:t)) =
∫gt (x0:t) p
(x0:t|y1:t
)dx0:t
may be approximated by mean:
(19) E (gt(x0:t)) =1
N
N∑i=1
gt (x0:t) ,
In order to compute a sequential estimate of posterioridistribution at time t without modifying the previously simula-ted states x0:t−1, proposal distributions of the following formcan be used:(20)
q(x0:t|y1:t
)= q
(x0:t−1|y1:t−1
)q(xt|x0:t−1, y1:t
),
the ate the making the assumption that the current state isnot depend on the future observations (filtering only withoutsmoothing). Under the assumptons that the states corespondto Markov Chain and that the observations are condittionallyindependent given the states:
(21) p (x0:t) = x0
t∏j=1
(xj |xj−1
),
and outputs:
(22) p(y1:t|x0:t
)=
t∏j=1
p(yj|xj
).
Substituting equations 21 and 22, and Bayesian importanceweights[9, 24]:
(23) wt =p(y1:t
)p (x0:t)
q(x0:t|y1:t
)
can obtain:
(24) wt = wt−1
p(yt|xt
)p(xt|xt−1
)q(xt|x0:t−1, y1:t
) .
Proposed in equation 24 mechanism to sequentially updatethe importance weights give an appropriate choice of propo-
sal distributions q(xt|x0:t−1, y1:t
). This form of distribution
is critical design issue. This procedure, known as sequentialimportance sampling (SIS), allows to obtain estimates impor-tance weights wt,i simpler for every particle as:
(25) wt,i = p(yt|xt−1,i
)wt−1,i
PRZEGLAD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 90 NR 6/2014 57
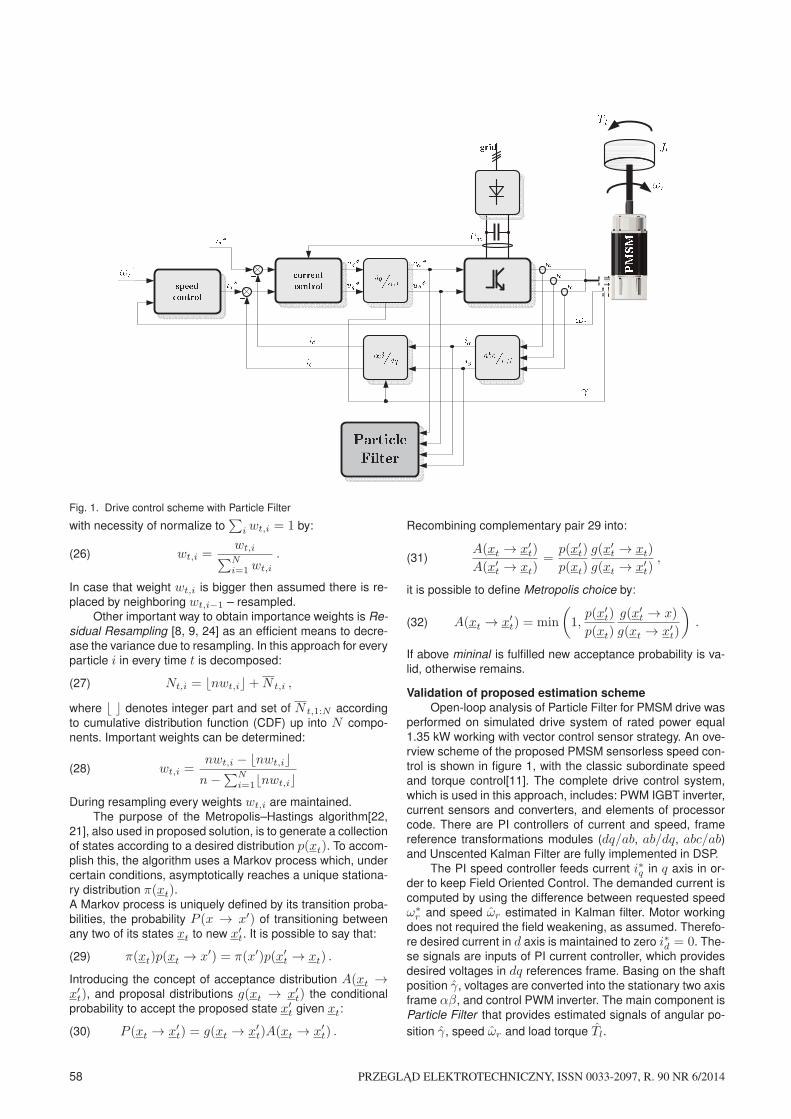
Fig. 1. Drive control scheme with Particle Filter
with necessity of normalize to∑
i wt,i = 1 by:
(26) wt,i =wt,i∑Ni=1 wt,i
.
In case that weight wt,i is bigger then assumed there is re-placed by neighboring wt,i−1 – resampled.
Other important way to obtain importance weights is Re-sidual Resampling [8, 9, 24] as an efficient means to decre-ase the variance due to resampling. In this approach for everyparticle i in every time t is decomposed:
(27) Nt,i = �nwt,i�+N t,i ,
where � � denotes integer part and set of N t,1:N accordingto cumulative distribution function (CDF) up into N compo-nents. Important weights can be determined:
(28) wt,i =nwt,i − �nwt,i�n−∑N
i=1�nwt,i�During resampling every weights wt,i are maintained.
The purpose of the Metropolis–Hastings algorithm[22,21], also used in proposed solution, is to generate a collectionof states according to a desired distribution p(xt). To accom-plish this, the algorithm uses a Markov process which, undercertain conditions, asymptotically reaches a unique stationa-ry distribution π(xt).A Markov process is uniquely defined by its transition proba-bilities, the probability P (x → x′) of transitioning betweenany two of its states xt to new x′
t. It is possible to say that:
(29) π(xt)p(xt → x′) = π(x′)p(x′t → xt) .
Introducing the concept of acceptance distribution A(xt →x′t), and proposal distributions g(xt → x′
t) the conditionalprobability to accept the proposed state x′
t given xt:
(30) P (xt → x′t) = g(xt → x′
t)A(xt → x′t) .
Recombining complementary pair 29 into:
(31)A(xt → x′
t)
A(x′t → xt)
=p(x′
t)
p(xt)
g(x′t → xt)
g(xt → x′t)
,
it is possible to define Metropolis choice by:
(32) A(xt → x′t) = min
(1,
p(x′t)
p(xt)
g(x′t → x)
g(xt → x′t)
).
If above mininal is fulfilled new acceptance probability is va-lid, otherwise remains.
Validation of proposed estimation schemeOpen-loop analysis of Particle Filter for PMSM drive was
performed on simulated drive system of rated power equal1.35 kW working with vector control sensor strategy. An ove-rview scheme of the proposed PMSM sensorless speed con-trol is shown in figure 1, with the classic subordinate speedand torque control[11]. The complete drive control system,which is used in this approach, includes: PWM IGBT inverter,current sensors and converters, and elements of processorcode. There are PI controllers of current and speed, framereference transformations modules (dq/ab, ab/dq, abc/ab)and Unscented Kalman Filter are fully implemented in DSP.
The PI speed controller feeds current i∗q in q axis in or-der to keep Field Oriented Control. The demanded current iscomputed by using the difference between requested speedω∗r and speed ωr estimated in Kalman filter. Motor working
does not required the field weakening, as assumed. Therefo-re desired current in d axis is maintained to zero i∗d = 0. The-se signals are inputs of PI current controller, which providesdesired voltages in dq references frame. Basing on the shaftposition γ, voltages are converted into the stationary two axisframe αβ, and control PWM inverter. The main component isParticle Filter that provides estimated signals of angular po-sition γ, speed ωr and load torque Tl.
58 PRZEGLAD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 90 NR 6/2014
The research proof was performed on simulated setupwith PMSM on parameters:
• nominal speed 3000 rpm,• nominal still load torque 4, 3Nm,• max load torque 11, 7Nm,• moment of inertia 2, 5 kg · cm2
• still current 2, 45A,• electromechanical constant 1, 6 Nm
A ,• EMF constant 98 V
1000rpm .As a result of the combination of two motor the moment
of inertia reduced to the motor shaft has increased the valueof J = 35, 36 [kg · cm2].
During particles generation assume noise covariancesQ i R in accordance with the rules for the expected normalGaussian distribution for vt,i and nt,i:
(33) Q = diag{ q1 q2 q3 q4 q5 } ,
(34) R = diag{ r1 r2 } ,where q1 and q2 are covariances of motor currents (d andq axis),and q3 – speed ωr, q4 – angular position γ, and q5means in as maximum possible change of of Tl during onecomputation period Ts. Coefficients r1 and r2 are variancesof measurements motor currents id and iq .Presented results bases on 100 particles.
The investigations presented below are in some senseintroduction confirming the use of Particle Filter to observethe electrical and mechanical variables of the drive. Therecan provide the possibility of using these variables to the fullsensorless control.
The entire experiment presented on figure 2 duringwhich the observer was tested for 100 particles, sequentialimportance sampling, in motor vector sensor control strate-gy. Main stages of experiment consist reference speed ω∗
rchanging:
• freely start up to desired speed ωr = 1000 obrmin , what is
13 nominal speed,
• reverse of established speed ωr = 1000 obrmin into ωr =
−1000 obrmin ,
• breaking to steady of shaft.
0 0.1 0.2 0.3 0.4 0.5−5
0
5
γ[rad]
γ
γ
0 0.1 0.2 0.3 0.4 0.5−100
0
100
ωr[rad s]
ωr
ωr
0 0.1 0.2 0.3 0.4 0.5−2
0
2
T[N
m]
t [s]
Tload
Tload
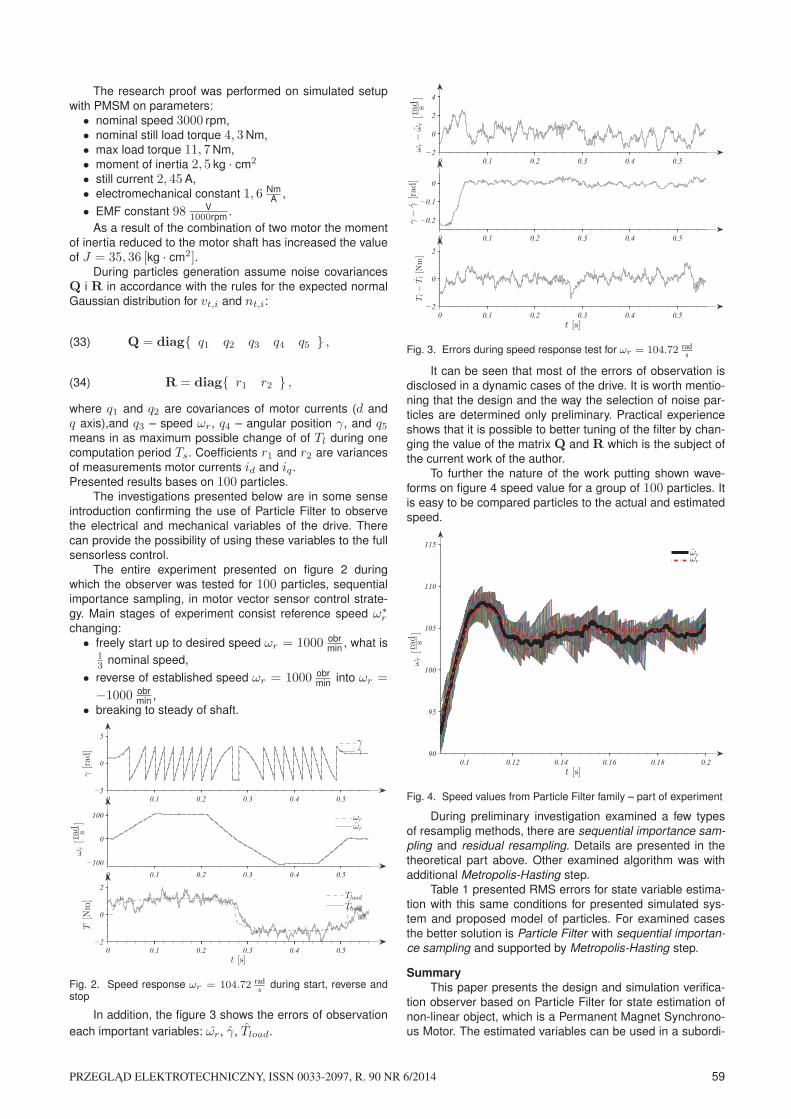
Fig. 2. Speed response ωr = 104.72 rads during start, reverse and
stop
In addition, the figure 3 shows the errors of observationeach important variables: ωr, γ, Tload.
0 0.1 0.2 0.3 0.4 0.5−2
0
2
4
ωr−ωr[rad s]
0 0.1 0.2 0.3 0.4 0.5
−0.2
−0.1
0
γ−γ[rad]
0 0.1 0.2 0.3 0.4 0.5−2
0
2
Tl−
Tl[N
m]
t [s]
Fig. 3. Errors during speed response test for ωr = 104.72 rads
It can be seen that most of the errors of observation isdisclosed in a dynamic cases of the drive. It is worth mentio-ning that the design and the way the selection of noise par-ticles are determined only preliminary. Practical experienceshows that it is possible to better tuning of the filter by chan-ging the value of the matrix Q and R which is the subject ofthe current work of the author.
To further the nature of the work putting shown wave-forms on figure 4 speed value for a group of 100 particles. Itis easy to be compared particles to the actual and estimatedspeed.
0.1 0.12 0.14 0.16 0.18 0.290
95
100
105
110
115
t [s]
ωr[rad s]
ωrωr
Fig. 4. Speed values from Particle Filter family – part of experiment
During preliminary investigation examined a few typesof resamplig methods, there are sequential importance sam-pling and residual resampling. Details are presented in thetheoretical part above. Other examined algorithm was withadditional Metropolis-Hasting step.
Table 1 presented RMS errors for state variable estima-tion with this same conditions for presented simulated sys-tem and proposed model of particles. For examined casesthe better solution is Particle Filter with sequential importan-ce sampling and supported by Metropolis-Hasting step.
SummaryThis paper presents the design and simulation verifica-
tion observer based on Particle Filter for state estimation ofnon-linear object, which is a Permanent Magnet Synchrono-us Motor. The estimated variables can be used in a subordi-
PRZEGLAD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 90 NR 6/2014 59
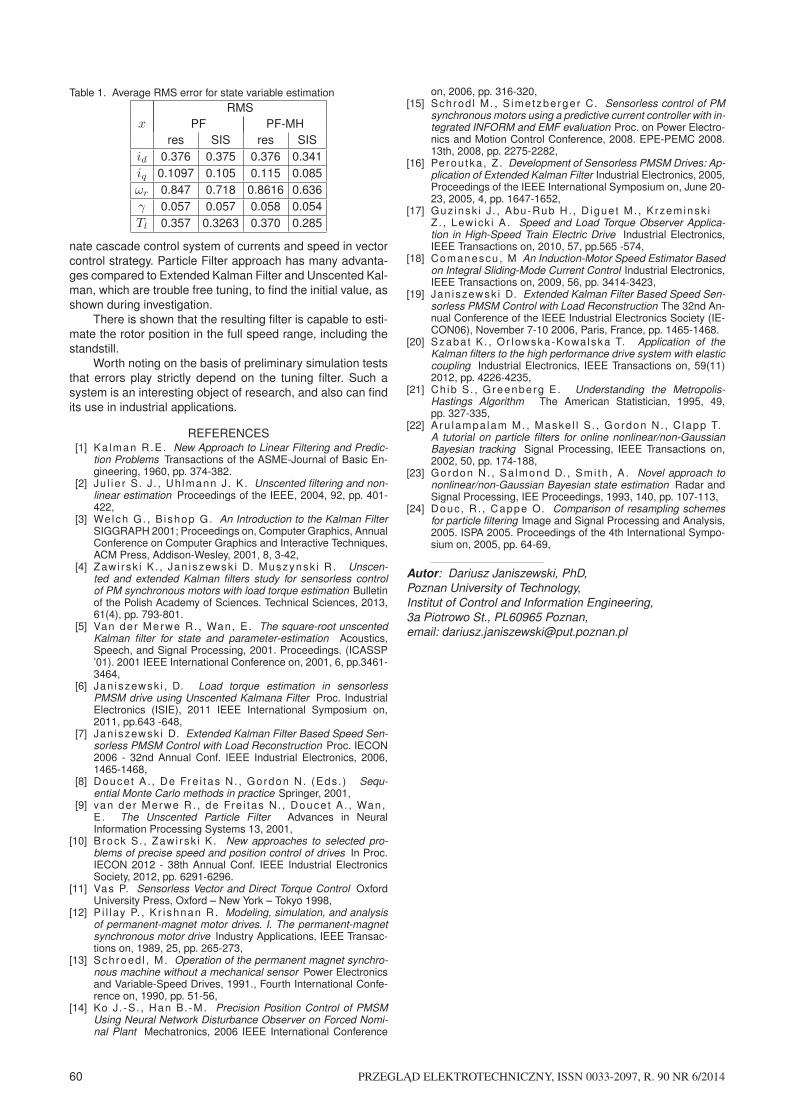
Table 1. Average RMS error for state variable estimation
xRMS
PF PF-MHres SIS res SIS
id 0.376 0.375 0.376 0.341iq 0.1097 0.105 0.115 0.085ωr 0.847 0.718 0.8616 0.636γ 0.057 0.057 0.058 0.054Tl 0.357 0.3263 0.370 0.285
nate cascade control system of currents and speed in vectorcontrol strategy. Particle Filter approach has many advanta-ges compared to Extended Kalman Filter and Unscented Kal-man, which are trouble free tuning, to find the initial value, asshown during investigation.
There is shown that the resulting filter is capable to esti-mate the rotor position in the full speed range, including thestandstill.
Worth noting on the basis of preliminary simulation teststhat errors play strictly depend on the tuning filter. Such asystem is an interesting object of research, and also can findits use in industrial applications.
REFERENCES[1] Ka lman R.E. New Approach to Linear Filtering and Predic-
tion Problems Transactions of the ASME-Journal of Basic En-gineering, 1960, pp. 374-382.
[2] Ju l ie r S. J. , Uh lmann J. K . Unscented filtering and non-linear estimation Proceedings of the IEEE, 2004, 92, pp. 401-422,
[3] We lch G. , B ishop G. An Introduction to the Kalman FilterSIGGRAPH 2001; Proceedings on, Computer Graphics, AnnualConference on Computer Graphics and Interactive Techniques,ACM Press, Addison-Wesley, 2001, 8, 3-42,
[4] Zawi rsk i K . , Jan iszewsk i D. Muszynsk i R . Unscen-ted and extended Kalman filters study for sensorless controlof PM synchronous motors with load torque estimation Bulletinof the Polish Academy of Sciences. Technical Sciences, 2013,61(4), pp. 793-801.
[5] Van der Merwe R. , Wan, E . The square-root unscentedKalman filter for state and parameter-estimation Acoustics,Speech, and Signal Processing, 2001. Proceedings. (ICASSP’01). 2001 IEEE International Conference on, 2001, 6, pp.3461-3464,
[6] Jan iszewsk i , D. Load torque estimation in sensorlessPMSM drive using Unscented Kalmana Filter Proc. IndustrialElectronics (ISIE), 2011 IEEE International Symposium on,2011, pp.643 -648,
[7] Jan iszewsk i D. Extended Kalman Filter Based Speed Sen-sorless PMSM Control with Load Reconstruction Proc. IECON2006 - 32nd Annual Conf. IEEE Industrial Electronics, 2006,1465-1468,
[8] Douce t A . , De Fre i tas N. , Gordon N. (Eds. ) Sequ-ential Monte Carlo methods in practice Springer, 2001,
[9] van der Merwe R. , de Fre i tas N. , Douce t A . , Wan,E . The Unscented Particle Filter Advances in NeuralInformation Processing Systems 13, 2001,
[10] Brock S. , Zawi rsk i K . New approaches to selected pro-blems of precise speed and position control of drives In Proc.IECON 2012 - 38th Annual Conf. IEEE Industrial ElectronicsSociety, 2012, pp. 6291-6296.
[11] Vas P. Sensorless Vector and Direct Torque Control OxfordUniversity Press, Oxford – New York – Tokyo 1998,
[12] P i l l ay P. , Kr i shnan R. Modeling, simulation, and analysisof permanent-magnet motor drives. I. The permanent-magnetsynchronous motor drive Industry Applications, IEEE Transac-tions on, 1989, 25, pp. 265-273,
[13] Schroed l , M. Operation of the permanent magnet synchro-nous machine without a mechanical sensor Power Electronicsand Variable-Speed Drives, 1991., Fourth International Confe-rence on, 1990, pp. 51-56,
[14] Ko J. -S. , Han B. -M. Precision Position Control of PMSMUsing Neural Network Disturbance Observer on Forced Nomi-nal Plant Mechatronics, 2006 IEEE International Conference
on, 2006, pp. 316-320,[15] Schrod l M. , S imetzberger C. Sensorless control of PM
synchronous motors using a predictive current controller with in-tegrated INFORM and EMF evaluation Proc. on Power Electro-nics and Motion Control Conference, 2008. EPE-PEMC 2008.13th, 2008, pp. 2275-2282,
[16] Perou tka , Z . Development of Sensorless PMSM Drives: Ap-plication of Extended Kalman Filter Industrial Electronics, 2005,Proceedings of the IEEE International Symposium on, June 20-23, 2005, 4, pp. 1647-1652,
[17] Guz insk i J. , Abu-Rub H. , D igue t M. , Krzeminsk iZ . , Lew ick i A . Speed and Load Torque Observer Applica-tion in High-Speed Train Electric Drive Industrial Electronics,IEEE Transactions on, 2010, 57, pp.565 -574,
[18] Comanescu , M An Induction-Motor Speed Estimator Basedon Integral Sliding-Mode Current Control Industrial Electronics,IEEE Transactions on, 2009, 56, pp. 3414-3423,
[19] Jan iszewsk i D. Extended Kalman Filter Based Speed Sen-sorless PMSM Control with Load Reconstruction The 32nd An-nual Conference of the IEEE Industrial Electronics Society (IE-CON06), November 7-10 2006, Paris, France, pp. 1465-1468.
[20] Szaba t K . , Or lowska-Kowa lska T. Application of theKalman filters to the high performance drive system with elasticcoupling Industrial Electronics, IEEE Transactions on, 59(11)2012, pp. 4226-4235,
[21] Ch ib S. , Greenberg E. Understanding the Metropolis-Hastings Algorithm The American Statistician, 1995, 49,pp. 327-335,
[22] Ar u lampa lam M. , Maske l l S. , Gordon N. , C lapp T.A tutorial on particle filters for online nonlinear/non-GaussianBayesian tracking Signal Processing, IEEE Transactions on,2002, 50, pp. 174-188,
[23] Gordon N. , Sa lmond D. , Smi th , A . Novel approach tononlinear/non-Gaussian Bayesian state estimation Radar andSignal Processing, IEE Proceedings, 1993, 140, pp. 107-113,
[24] Douc, R. , Cappe O. Comparison of resampling schemesfor particle filtering Image and Signal Processing and Analysis,2005. ISPA 2005. Proceedings of the 4th International Sympo-sium on, 2005, pp. 64-69,
Autor: Dariusz Janiszewski, PhD,Poznan University of Technology,Institut of Control and Information Engineering,3a Piotrowo St., PL60965 Poznan,email: [email protected]
60 PRZEGLAD ELEKTROTECHNICZNY, ISSN 0033-2097, R. 90 NR 6/2014