-
7/30/2019 Performance Analysis and Compensation of MT-Type
Digital Tachometers-pAK
1/6
IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 50,
NO. 4, AUGUST 2001 965
Performance Analysis and Compensation ofM = T -Type Digital
Tachometers
Richard C. Kavanagh, Senior Member, IEEE
AbstractNew analyses are presented of the widely used-type
digital tachometer. This device incorporates accurate
time measurement with pulse counting. It is shown that
theaccuracy of velocity measurement in real implementations is
sig-nificantly poorer than indicated previously. Encoder
nonidealitiesare found to introduce a bias in the measured velocity
output. Asignificant rms output error can also result. The
insensitivity ofthe error to the form of the encoder noise model is
demonstrated,and two analyses of differing complexity are
presented. Thesepermit calculation of the tachometer error
measures, based ona knowledge of the magnitude of the error
characteristics of theencoder. This facilitates the implementation
of a compensationfunction that will reduce the influence of the
bias. Experimentalresults are presented which demonstrate the
existence of the bias,
verify the validity of the derived formulae, and show the
benefit tobe gained by compensation.
Index TermsDigital measurements, error analysis,
errorcompensation, optical transducers, optical velocity
measurement,probability, quantization, tachometers.
I. INTRODUCTION
ANUMBER of digital tachometers which have been de-
scribed intheliterature[1][4]arebased onthe -type
digital tachometer (MTDT) developed by Ohmae, et al. [5].
The
application of this technique is motivated by the fact that
the
velocity value obtained from a digital position transducer
via
simple pulse counting (or digital differentiation of the
output)will result in poor resolution due to spatial quantization.
How-
ever, the addition of an auxiliary counter in the MTDT
allows
compensation for the fact that encoder edges occur asynchro-
nously with the sampling instants of a microprocessor- or
DSP-
based control or instrumentation system operating with a
fixed
sample interval.
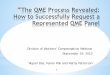
The principle of the tachometer is illustrated in Fig. 1; a
high-
frequency counter can be used to measure accurately. This
counter is reset at an encoder edge. Its use facilitates the
calcu-
lation of an accurate velocity estimate (in units of code
changes
per second)
(1)
(It is worth noting that this concept, which was
independently
developed for use in high-accuracy motion control
applications,
has similaritiesto the work of Nutt [6]and, more recently,
Kalisz
et al. [7], [8] on time-interval measurement).
Manuscript received May 4, 2000; revised April 6, 2001.The
author is with the Department of Electrical and Electronic
Engineering,
University College Cork, Cork, Ireland (e-mail:
[email protected]).Publisher Item Identifier S
0018-9456(01)07353-3.
Fig. 1. Operation of the auxiliary counter in an M = T
tachometer.
Henceforth, the nominal angular position change between en-
coder output transitions and the number of such transitions
oc-
curring per sample-time are used as the units of position and
ve-
locity (rate), respectively. Using these units, the estimated
rate
is defined by
(2)
in code changes (transitions) per sample-time (this unit is
ab-
breviated to Transitions in the figures below). At very low
speed, when no transition has occurred during a
sample-period,
the velocity calculation is adapted to
(3)
where is the number of samples since the previous encoder
edge.
II. INFLUENCE OF ENCODER ERRORS ON PERFORMANCE
Analyses have been presented by Prokin [3] and Ohmae et
al. [5] that illustrate the very high potential accuracy of the
ve-
locity measurement obtained using an MTDT. These analyses
have concentrated on the error that results from the digital
na-
ture of the auxiliary counter. The relative error due to this
ef-
fect isusually approximatedat most rates by , where
is the auxiliary counter frequency (for example, an un-
certainty of the order of 0.01% is expected if ms andMHz).
However, the actual performance is usually
substantially poorer than indicated in such analyses due to
the
nonideal nature of the incremental encoders which provide
the
digital pulse-train inputs.
These nonidealities have been well described and catego-
rized by Yien [9]. The variation in encoder-edge locations
from
the ideal equidistant locations leads to both differential-
and
integral-type errors [10]. The former appear as
high-frequency
errors when viewed over the circumference of the encoder
disk,
while integral-type errors display a low-frequency (usually
00189456/01$10.00 2001 IEEE
AlultIXDoM1a1UfIX Ra
-
7/30/2019 Performance Analysis and Compensation of MT-Type
Digital Tachometers-pAK
2/6
966 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL.
50, NO. 4, AUGUST 2001
once-per revolution) characteristic. The differential-type
tran-
sition-noise will typically be the dominant error source in
an
MTDT.
A first-order analysis, showing that this error can cause a
sig-
nificant rms error in speed measurement was briefly outlined
in [11], in which it was also shown that substantial
additional
hardware is required if this error is to be reduced. More
accurate
analysis, to be described in this paper, shows that the
transitionnoise introduces a bias into the velocity measurement,
which
is not removed by linear filtering techniques. This bias
occurs
because of the nonlinear nature of the MTDT velocity
calcula-
tion. While usually small in magnitude, this error has
potentially
important consequences for high-accuracy measurement appli-
cations in which the MTDT is likely to be employed.
III. TRANSITION NOISE MODEL
It was illustrated in [12] that uniformly distributed noise
can
provide a reasonable model for the transition noise. It was
also
shown that the parameter describing the width of the
transition
region (i.e., the range of actual positions at which a change
indigital position code occurs) can be obtained, for a
particular
sensor, by analyzing the error spectrum that results if a
simple
digital differentiator is used for shaft velocity
measurement.
However, the actual noise distribution will inevitably
differ
somewhat from the simple uniform distribution model. To
investigate the influence of the noise model chosen, the
errors
caused by uniformly distributed noise are compared with
those
due to a truncated Gaussian distribution with the same
standard
deviation. Such a choice is motivated by the fact that one
might
expect a high probability that the code change will occur
near
the nominal position, but a simple Gaussian distribution is
not
physically realistic because of the ordered sequence of code
changes. When the truncated distribution is limited to the
range, where represents the standard deviation that
would accrue without truncation, this variable can be shown
to be related to the actual standard deviation with
truncation
by
(4)
where
(5)
By equating the standard deviation of the uniform and
truncated
Gaussian distributions, based on the assumption that the
uni-
formly distributed position error will be in the range ,
the sensitivity of the MTDT error to the error characteristic
can
be investigated. In Fig. 2, computer simulations are used to
il-
lustrate the effects of transition noise error. It is clear from
this
figure that both models predict very similar velocity error
char-
acteristics. Therefore, the simpler uniform distribution can
be
employed for tachometer analysis.
The encoder model used to predict tachometer performance
has assumed a simple random distribution of encoder
transition
location errors. This assumption is not valid in a quadrature
de-
Fig. 2. Average andrms errors e and e associated with MTDT,
assumingeither uniformly distributed noise ( = 0 : 2 ) , or
truncated Gaussian noise ( k =2 ) (portions of the plots are shown
magnified by 360% to aid discrimination ofthe very similar
curves).
coded system if the errors are mainly due to phasing errors
be-
tween positive and negative transitions of a particular
channeland/or between channels (state width errors). The model is
still
found to give a good approximation to the system behavior,
but
with reduced accuracy, as demonstrated below.
IV. ANALYSIS OF THE MTDT
The tachometer is analyzed using the encoder model shown
in Fig. 3. A complete and exact analysis is deceptively
difficult.
Probability of overlap or, otherwise, between the sampling
in-
stants and the transition regions, is central to the analysis.
When
samples of the pulse count and auxiliary timer values are
taken
at a position that is in the transition region, the values
sampled
will depend on whether or not the position change has
actuallyalready occurred. This is illustrated in Fig. 4. A large
number
of distinct conditions are possible, particularly when the rate
is
close to an integer number of transitions per sample time,
so
that a double overlap condition becomes possible (i.e., when
adjacent samples may occur in transition regions). Similar
anal-
ysis has been undertaken when considering the intercept time
problem in radar warning receivers [13].
While possible, a complete analysis yields very cumbersome
expressions for both average and rms errors. Two simplified
analyses are presented in this paper. The first is a simple
first-
order analysis that yields an intuitive insight into the system
op-
eration. The second is more accurate and involved and
produces
AlultIXDoM1a1UfIX Ra
-
7/30/2019 Performance Analysis and Compensation of MT-Type
Digital Tachometers-pAK
3/6
KAVANAGH: PERFORMANCE ANALYSIS AND COMPENSATION OF -TYPE DIGITAL
TACHOMETERS 967
Fig. 3. Encoder model for MTDT analysis.
Fig. 4. Relationship between sample interval T and actual
encoder transitionlocations [in (a) the first sample occurs prior
to the transition, in (b) it occursafter].
accurate error prediction formulae at most input rates. How-
ever, a simplified linear interpolation is used to yield an
approx-
imate expression for sensor bias at those rates for which
double
overlap is possible.
A. Simple Approximation
The actual digital position change, as indicated by the main
counter, is in error by due to the transition noise,
where and are two manifestations of the uniformly dis-
tributed transition noise process. Therefore, the error
associated
with the digital differentiation of the main counter output is
rep-
resented by a triangular distribution,
(6)
If the input rate is transitions per sample time, the
average
value of , the position change per sample will equal the ac-tual
speed (rate) of the encoder shaft in code changes per sample
time (the actual digital position change is usually , or
) where represents the largest integer number that is less
than, or equal to, the argument. The time duration
corresponding
to the values of the auxiliary counter at successive samples
will
differ from that expected of a noise-free system by an
amount
represented by the variable (assuming ), where
is the probability density function of . The corresponding
ve-
locity measurement error is
(7)
so that the average error is approximated by
(8)
and the mean-squared error by
(9)
When the error is defined instead by ,
the corresponding error measures being
(10)and
(11)
In Fig. 5, these error estimates (Approximation I) are
compared
with those obtained by a simulation in which the errors are
av-
eraged over 60 000 samples for each input rate (the rms error
is
close to for , corresponding to the approximation
, which was utilized in [11]).
B. More Accurate Approximation
It is clear that the above analysis is not accurate in its
estimateof average error. This is because it does not reflect a
number of
facts.
There is a higher probability that a sample instant will
occur during an interval in which the transition noise re-
sults in a longer than average position variation between
transitions. The probability that the digital position
change
is , rather than , is higher when the transitions
corresponding to and have a wider
than average separation. This can be related to the random
variable .
The nature of the probability density function (p.d.f.) gov-
erning the timer values varies when the sample in-stant occurs
somewhere in the transition region associated
with a particular digital position. The sample instant may
occur before the actual transition location, in which case
the transition of relevance will have occurred in the pre-
vious transition region, approximately one bit previously,
as illustrated earlier in Fig. 4(a). This is found to result
in
the standard triangular p.d.f. However, when the sampling
instant has already occurred [as illustrated in Fig. 4(b)],
the p.d.f. of the time interval used in the velocity
calcula-
tion is found to change.
Taking these effects into account, it is shown in the
Appendix
that a more accurate estimate of average measured speed pre-
AlultIXDoM1a1UfIX Ra
-
7/30/2019 Performance Analysis and Compensation of MT-Type
Digital Tachometers-pAK
4/6
968 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL.
50, NO. 4, AUGUST 2001
Fig. 5. Comparison between error measures (rms and average
errors) obtainedusing computer simulation and estimated by
Approximations I and II (the latteremployed to estimate e
only).
dicted by the MTDT can be derived. This derivation produces
the following rate estimate when the actual rate is
(12)
when , and , where represents the
fractional value of . This latter condition guarantees that
twoadjacent sample instants will not both be in transition
regions.
To avoid a more cumbersome analysis when is close to zero
or one, use is made of the experimental observation that (12)
is
accurate when . A linear interpolation for
the average velocity error is postulated for other rates
(13)
where is the integer closest to . It is shown
in Fig. 5 that this approximation (Approximation II) yields
esti-
Fig. 6. Comparison between uncompensated and compensated
experimentalbias measurements, simulation predication, and
theoretical approximation (aportion of the plot is shown magnified
by 360% to aid discrimination of thevery similar curves).
mates of the average error that are very close to those
generated
by time-domain simulation, particularly when .
V. EXPERIMENTAL VERIFICATION
A low-cost, 500-cycle per revolution encoder was tested
using a low-velocity, high-inertia rig in quadrature-decoder
mode (given 2000 transitions per revolution and ms,
a rate of corresponds to 1.5 rpm). Examination of the
error spectrum of a simple digital differentiator applied to
the
digital position derived from the encoder pulses can be used
to estimate the magnitude of the encoder transition noise
[12].
This analysis yielded .
The average error is measured experimentally by rotating the
encoder at close to constant speed1 . In Fig. 6, the measured
error
is compared with the estimate of derived using Approxi-mation
II, and with that predicted by a time-domain computer
simulation of an encoder with the error characteristics
assumed
in this paper. The curves match very well, except at those
rates
that are close to multiples of four, and at very low rates.
The
former rates equate to an integer number of encoder cycles
per
sample-time (and compensation can be turned off at these
rates).
The deficiency of the model at these rates can be explained
by
the deterministic variation in state widths that exists in a
quadra-
ture decoded system. However, the approximation is good at
most rates and can be used to reduce the steady-state bias
in
systems where such bias would be significant.
Based on the velocity estimated using the method at
each sample, and a knowledge of the transition noise figure
ofthe sensor, compensation is achieved by simply subtracting
the
error measure obtained using an appropriate formula. (12),
which is used to achieve the compensated output displayed in
Fig. 6, is accurate when is greater than approximately ,
while (8) and (10) can be used at lower rates. When the rate
is
reasonably large , it is found heuristically that
approximates very closely to (12) and is therefore suit-
able for simplified real-time implementation.
1Theuse ofa high-inertiatest-rig ensures that thespeedvariation
is very smallduring each test. The unavoidable variation will cause
a slight integral error thatwill alter the error measure at close
to integer rates [10]. However, its effect isusually much less than
that of differential error.
AlultIXDoM1a1UfIX Ra
-
7/30/2019 Performance Analysis and Compensation of MT-Type
Digital Tachometers-pAK
5/6
KAVANAGH: PERFORMANCE ANALYSIS AND COMPENSATION OF -TYPE DIGITAL
TACHOMETERS 969
TABLE IPOSSIBLE OPERATING CONDITIONS AND THEIR RESPECTIVE
PROBABILITIES WHEN 2 "
-
7/30/2019 Performance Analysis and Compensation of MT-Type
Digital Tachometers-pAK
6/6
970 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL.
50, NO. 4, AUGUST 2001
The average velocity is obtained by adding the integrals re-
lated to the various cases above, each integral being
multiplied
by the probability of occurrence of that case
(15)
This equation can be solved using Mathematica to yield (12),
after some manual reformulations.
REFERENCES
[1] G. Bucci and C. Landi, Metrological characterization of a
contactlesssmart thrust and speed sensor for linear induction motor
testing, IEEETrans. Instrum. Meas., vol. 45, pp. 493498, Apr.
1996.
[2] R. C. Kavanagh, J. M. D. Murphy, and M. G. Egan, A
high-perfor-mance positioning system using improved digital speed
sensing, inProc. 3rd. Euro. Conf. Power Electron. Applicat.
(EPE89), Aachen,Germany, Oct. 1989, pp. 9971002.
[3] M. Prokin, Double buffered wide-range frequency
measurementmethod for digital tachometers, IEEE Trans. Instrum.
Meas., vol. 40,pp. 606610, June 1991.
[4] , Extremely wide-range speed measurement using
adouble-buffered method, IEEE Trans. Ind. Electron., vol. 41,pp.
550559, Oct. 1994.
[5] T. Ohmae, T. Matsuda, K. Kamiyama, and M. Tachikawa, A
micropro-cessor-controlled high-accuracy wide-range speed regulator
for motordrives,IEEE Trans. Ind. Electron., vol. IE-29, pp. 207211,
Aug. 1982.
[6] R. Nutt, Digital time intervals meter, Rev. Sci. Instrum.,
vol. 39, pp.13421345, 1968.
[7] J. Kalisz, M. Pawlowski, and R. Pelka, Error analysis and
design of thenutt time-interval digitiser with picosecond
resolution, J. Phys. E, Sci.
Instrum., vol. 20, no. 11, pp. 13301341, 1987.[8] J. Kalisz, R.
Szplet, J. Pasierbinski, and A. Poniecki, Field-pro-
grammable-gate-array-based time-to-digital converter with
200-psresolution, IEEE Trans. Instrum. Meas., vol. 46, pp. 851856,
Aug.1997.
[9] C. Yien, Incremental encoder errors: Causes and ways to
reduce them,in Proc. Intl. Incremental Motion Conf. (PCIM 92),
Nrnberg, Ger-many, Apr. 1992, pp. 110121.
[10] R. C. Kavanagh, Shaft encoder characterization via
theoretical modelof differentiator with both differential and
integral nonlinearities, IEEETrans. Instrum. Meas., vol. 49, pp.
795801, Aug. 2000.
[11] , Improved digital tachometer with reduced sensitivity to
sensornonideality, IEEE Trans. Ind. Electron., vol. 47, pp. 890897,
Aug.2000.
[12] R. C. Kavanagh and J. M. D. Murphy, The effects of
quantization noiseand sensor nonideality on
digital-differentiator-based velocity measure-ment, IEEE Trans.
Instrum. Meas., vol. 47, pp. 14571463, Dec. 1998.
[13] I. V. Clarkson, J. E. Perkins, and I. M. Mareels,
Number/theoretic so-lutions to intercept time problems, IEEE Trans.
Inform. Theory, vol.IT-42, pp. 959971, May 1996.
Richard C. Kavanagh (M95-SM01) was born in Cork, Ireland, in
1961. Hereceived the B.E., M.Eng.Sc., and Ph.D. degrees in
electrical engineering fromthe National University of Ireland,
Cork, in 1984, 1985, and 1998, respectively.
Heis a College Lecturer at theNationalUniversityof
Ireland,wherehe directsthe Mechatronics Research Laboratory. He has
previously worked as a SeniorResearch Scientist with PEI
Technologies and as a Senior Project Engineer withSPS Laboratories,
Ltd. His current research interests include improved sensordesign
through advanced signal processing, the analysis of quantization
effectsin data acquisitionsystems, and the design of
hardware-in-the-loop test systems.