Embed Size (px)
Citation preview

Performance Evaluation of ModelPredictive Control for a Water BathTemperature System Based on its
Integer and Non-integer Order Models
Abdul Wahid Nasir1, Idamakanti Kasireddy2, Arun Kumar Singh3
1 , 2 , 3Department of Electrical and Electronics EngineeringNational Institute of Technology Jamshedpur
Jamshedpur, [email protected]
September 17, 2017
AbstractThis paper utilizes the concept of fractional order mod-
eling in implementing Model Predictive Control (MPC) forthe temperature control of a Water Bath system. In presentwork, system behavior is studied from experimental setup,but for the controller performance evaluation, simulationbased analysis is made. Prior to engaging the non-integerorder model for MPC design, it is firstly converted to higherinteger order model using Oustaloup’s recursive approxima-tion. Since the performance of such type of control tech-nique depends on the accuracy of model of the plant, henceMPC based on non-integer model will give better perfor-mance rather than integer order model, as former is ableto capture the model dynamics more accurately than later.Different simulations performed in MATLAB also ratifiesthe same.
AMS Subject Classification: 93C83, 58E25Key Words and Phrases: Water Bath, Temperature
control, Model predictive control, Fractional order model-ing.
1
International Journal of Pure and Applied MathematicsVolume 116 No. 10 2017, 397-410ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version)url: http://www.ijpam.euSpecial Issue ijpam.eu
397

1 Introduction
Temperature monitoring plays a decisive role in controlling theproduct quality of various process industries. Water Bath is oneof the very useful system associated with chemical and food pro-cessing sector [1, 2]. In chemical industries, the water bath sys-tem proves to be crucial to gain control over chemical reactions,whereas in food industries it is used for pasteurization of differentmilk products and also for preparing other products. Here a simpleexperimental setup has been established depicting the water bathsystem. To achieve present control objective, a very popular modelbased control technique, i.e. Model Predictive Control (MPC), hasbeen adopted. The model required for the design of MPC is esti-mated based on the information provided by open loop response ofthe experimental setup. The system is not only modeled as integerorder but also as non-integer, which results in enhancement of thecontroller performance.
The term fractional order modeling refers to the class of model-ing of the systems where fractional derivative or integral operatorsare used. The branch of mathematics dealing with such type ofoperators is known as “Fractional Calculus′′ rather than simply“Calculus′′. The definition of such type of non-integr fundamentaloperator is given by equation (1), where α is the operator and ‘a’& ‘t’ are the limits of the operator.
aDαt =
dα
dtαif α > 0
1 if α = 0∫ ta(dτ)−α if α < 0
(1)
In spite of the fact that fractional calculus is as old as conventionalcalculus, but it was not being preferred by scientific community, asthe solutions of problems consisting such non-integer operator werenot available. In recent decades, the hard work of the researchershave provided the technique to deal with such type of operators,thus making its application feasible in varied field of engineering.Monje, Vinagre, Xue and Feliu have presented their analysis onfractional order system and control in great detail [3]. A num-ber of research articles are also available, where the applications offractional calculus is being applied in control engineering to give
2
International Journal of Pure and Applied Mathematics Special Issue
398

further improved results [4, 5, 6]. The usage of the term fractionalorder and non-integer order in the present article reperesents thesame entity. Also for simulation work related to non-integer ordersystem, FOMCON toolbox [7] has been used in MATLAB.
The rest of the paper is organized as follows. The stepwiselayout of the work carried out is given in Section II. Experimen-tal setup is described in section III. Section IV gives the transferfunction modeling of the water bath system based on its open loopdata. The control schemes implemented for the temperature con-trol of water bath system, i.e. MPC is discussed briefly in sectionV. Simulations results are presented and discussed in section VI.After analyzing the results conclusion is drawn in Section VII.
2 Work Layout
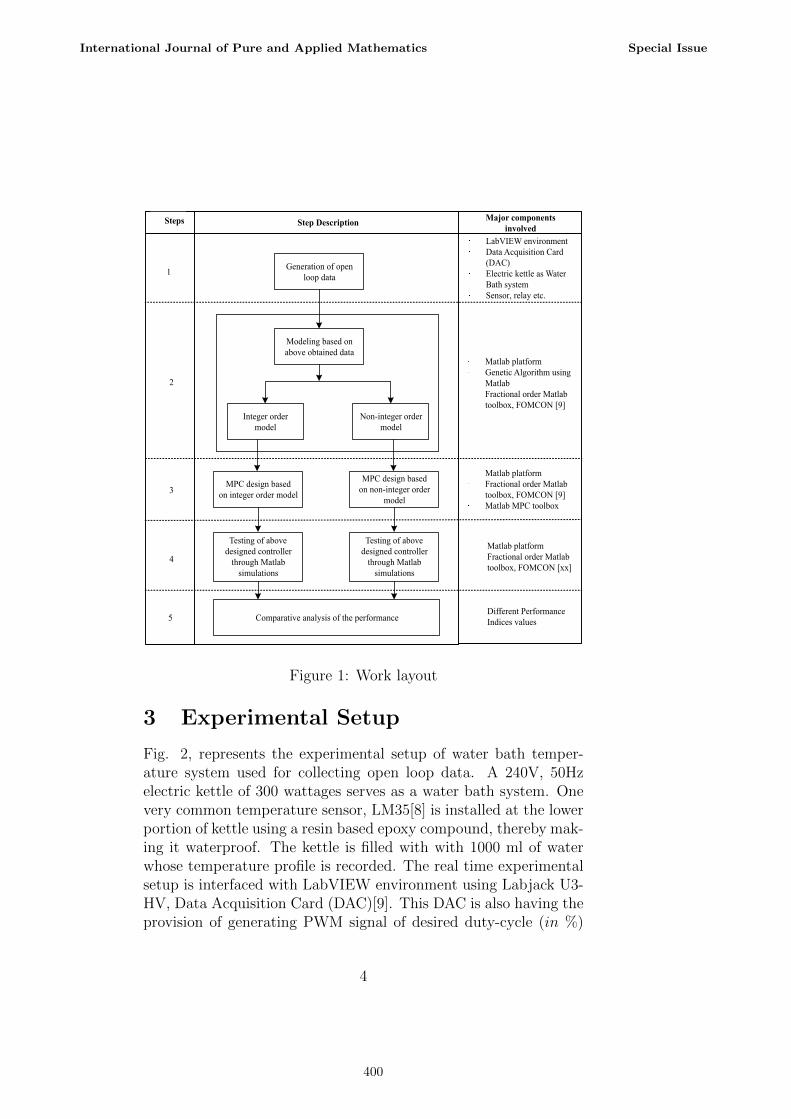
Stepwise working procedure for the design of MPC to control thetemperature profile of Water Bath system can be well understoodby Fig. 1. For each steps, the tool required to achieve that partic-ular step is also listed. Following are the different stepwise descrip-tion.• Step1: Firstly open loop data are collected when excited to dif-ferent step input.• Step2: The data obtained in Step 1 are then used to estimatethe integer and non-integer order model parameters using GeneticAlgorithm (GA).• Step3: MPC are designed based on these integer and non-integerorder models obtained in Step 2 respectively, using MATLAB MPCtoolbox.• Step4: The controllers obtained in Step 3 is tested against stepchange in the set-point. Also the regulatory responses are notedby adding disturbance at the output. All these testings are donethrough MATLAB simulations.• Step5: Based on above simulations, different performance indicesare calculated to make comparative study between the controllersobtained based on integer and non-integer order models respec-tively.
3
International Journal of Pure and Applied Mathematics Special Issue
399
Generation of open
loop data
Modeling based on
above obtained data
Integer order
model
Non-integer order
model
MPC design based
on integer order model
Testing of above
designed controller
through Matlab
simulations
MPC design based
on non-integer order
model
Testing of above
designed controller
through Matlab
simulations
Comparative analysis of the performance
Steps Step DescriptionMajor components
involved
1
2
3
4
5
� LabVIEW environment
� Data Acquisition Card
(DAC)
� Electric kettle as Water
Bath system
� Sensor, relay etc.
� Matlab platform
� Genetic Algorithm using
Matlab
� Fractional order Matlab
toolbox, FOMCON [9]
� Matlab platform
� Fractional order Matlab
toolbox, FOMCON [9]
� Matlab MPC toolbox
� Matlab platform
� Fractional order Matlab
toolbox, FOMCON [xx]
� Different Performance
Indices values
Figure 1: Work layout
3 Experimental Setup
Fig. 2, represents the experimental setup of water bath temper-ature system used for collecting open loop data. A 240V, 50Hzelectric kettle of 300 wattages serves as a water bath system. Onevery common temperature sensor, LM35[8] is installed at the lowerportion of kettle using a resin based epoxy compound, thereby mak-ing it waterproof. The kettle is filled with with 1000 ml of waterwhose temperature profile is recorded. The real time experimentalsetup is interfaced with LabVIEW environment using Labjack U3-HV, Data Acquisition Card (DAC)[9]. This DAC is also having theprovision of generating PWM signal of desired duty-cycle (in %)
4
International Journal of Pure and Applied Mathematics Special Issue
400

Stirrer
LM-35
mounted
inside kettle
LabVIEW
Environment
Computer
LabJack
U3-HV DAC
OP-AMP Solid State
Relay 2-Amp
Fuse
Figure 2: Water Bath System
through inbuilt PWM signal generator function just by using it inthat specific mode.Thus to obtain the step response in open loopconfiguration, the step change is made in the duty cycle of PWMmanually, which then goes to Solid State Relay (SSR)[10] throughthe non-inverting OP-AMP arrangement to regulate the power flowto the electric kettle. The output of the DAC is 3.3V and SSR usedhere operates at 5V, therefore a non-inverting OP-AMP arrange-ment is employed to amplify 3.3V signal to 5V. This is how fordifferent input of PWM signal, the open loop data is collected.
4 Integer & Non-Integer Order Model-
ing
The process of data collection, as discussed in Sec III is carried outin two ways. Firstly the duty cycle of PWM signal is varied from20% to 40% , at interval of every 2.5% and corresponding steadystate temperature profile is noted. Then these input-output datais plotted as shown in Fig.3, from which it is inferred that withinthe specified range of input, water bath temperature profile almostexhibits linear characteristic.
Secondly, a step change is made in the duty cycle around theoperating condition to observe the open loop step response and isfound to be very much akin to the step response of First Order Plus
5
International Journal of Pure and Applied Mathematics Special Issue
401

20 25 30 35 4045
50
55
60
65
Duty cycle of PWM signal (%)
Wat
er b
ath
tem
pera
ture
( o C
)
Figure 3: Input-Output characteristic
Delay (FOPD) system. Hence water bath system is modeled by thetransfer function given by equation(2), where the parameters Gain(K), Time constant (τ) and Delay (L) are estimated. The systemis also modeled as non-integer FOPD system, where one additionalparameter i.e. ‘α’, order of the model along with (K),(τ) & (L)is also estimated as given by equation (3). The reason to modelthe system as non-integer order other than integer order is that theformer is able to capture the system dynamics more accurately ascompared to later one.
Ginteger =K
τs+ 1e−Ls (2)
Gnon integer =K
τsα + 1e−Ls (3)
For parameters estimation of models given by equation (2) &(3),a very popular nature inspired optimization technique, i.e. Ge-netic Algorithm (GA)[11, 12], has been employed. Prior to thestart for search of optimal parameters using GA, one has to ini-tialize the optimal parameter values. Also an objective function,whose fitness depends on these parameters are defined which is be-ing minimized or maximized as per need of the problem. For thepresent case, Integral of Squared Error (ISE), given by equation(4)is taken as objective function subject to minimization.By compar-ing the available open loop data with model step response data atevery simulation run, the error is obtained, based on which ISEvalue is calculated. It is then fed back to GA, executed in Matlabas shown in Fig.4. This loop keeps on running until optimality isreached.
ISE =
∫ ∞
0
{ysp(t)− y(t)}2dt =
∫ ∞
0
{e(t)}2dt (4)
6
International Journal of Pure and Applied Mathematics Special Issue
402

()Es−ISE
GA
−
−
MODEL
STEP INPUT+WATER BATH
SYSTEM
Real time
data
Model data
Figure 4: Model parameter estimation using GA
Table 1 gives the considered GA characteristics.
Table 1: Genetic Algorithm CharactersticsPopulation size 50Fitness scaling function RankCrossver function 0.8Crossver fraction ScatteredMigration Fraction 0.2Ending Criterion Function tolerance of 1e-4
The estimated integer & non-integer transfer function modelparameters is given in Table II, with their respective ISE values.The open loop step response of the obtained models along withthe real system, shown in Fig.5, helps in validating the estimatedmodels.
0 200 400 600 800 1000 1200 1400 160030
35
40
45
50
Time (s)
Wat
er B
ath
tem
pera
ture
( o C
)
System responseInteger model responseNon−integer response
1100 1200 1300 1400
45
46
47
Figure 5: Open loop step responses
7
International Journal of Pure and Applied Mathematics Special Issue
403

Table 2: Estimated modelNature of model Transfer Function ISE
Integer order1.114
1170s + 1e−122s 690
Non-integer order1.122
1313s1.021 + 1e−112s 230
5 Model Predictive Control
Model Predictive Control (MPC) is one of the advanced modelbased control technique, where the accuracy of process model sig-nificantly affects the overall closed loop control performance. Twovery renown companies Shell Oil and ADERSA around 1980, pro-posed the elementary idea of MPC [13, 14]. This technique gained awide acceptance worldwide from different process industries, mainlyoil refineries and and petrochemical plants. The main adorable fea-ture of MPC is that, it can easily deal with the control aspect ofmulti-input multi-output (MIMO) system and also fulfilling thedesired constraints on input as well as on output at the same time.Although the present control problem limits to single input singleoutput system.
In MPC, the future control moves are calculated based on themodel response. Depending on the error obtained by comparingthe predictions and actual measurements, an appropriate changein manipulated variable is made. Fig.6 shows the MPC block di-agram, where the residual or error is fed back to Prediction block[13]. At every sampling instant, the predicted output is used forupdating the set-point and control moves calculations. This con-trol calculation block mainly involve optimizer, which optimizes analready defined objective function to generate the future controlmoves. Different terminologies associated with MPC are as follows:• Sampling time(Ts) : It is the time interval at which the controlaction takes place after performing all the control calculations. Inpresent case the control interval is taken same as sampling time.• PredictionHorizon(P ) : It is number of interval for which MPCpredicts the future control moves based on MPC calculations.• ControlHorizon(M) : It is number of manipulated variable movesto make at the specified control interval.• Objectivefunction : It is function of error whose value needs to be
8
International Journal of Pure and Applied Mathematics Special Issue
404

Figure 6: MPC block diagram [14]
minimized to obtain optimum control moves. Generally quadraticobjective function is taken and so is the present case. It is definedas the sum of squares of predicted errors.Table III gives the Matlab MPC toolbox setting used for derivingthe controller.
Table 3: MPC SettingsSampling time (Ts) 1 secondPrediction Horizon(P ) 2000Control Horizon(M) 5Objective function Quadratic
For designing MPC based on non-integer model [15], it is firstlyconverted the equivalent higher integer order model using Oustaloupsmethod [16].
6 Results and Discussions
For testing the control performance of the designed MPC controllersvarious simulations were performed using MATLAB simulink. Asobserved in Section IV, non-integer model is more accurate than in-teger order model, therefore for simulation purpose the non-integerorder model is assumed to be representing the actual system. Thenthe MPC based on integer order model is implemented in closedloop followed by the MPC based on non-integer. A step change ismade to have the desired water bath temperature of 50◦C. Fig.7gives the step responses for both type of MPC’s, from which differ-ent time domain performance indices were obtained and tabulatedin Table IV. The results of Table IV shows the superiority of MPC
9
International Journal of Pure and Applied Mathematics Special Issue
405

based on non-integer order model over integer order, only rise time,tr being the exception, which is not so relevant in the present case.
0 200 400 600 800 1000 1200 1400 1600 1800 20000
10
20
30
40
50
60
Time (s)
Wate
r bath
tem
pera
ture
( o
C )
Set-point
MPC based on non-IO model
MPC based on IO model
0 200 400 600 800 1000 1200 1400 1600 1800 200040
60
80
100
120
Time (s)
Duty
cycle
of P
WM
sig
nal (%
)
Control output for MPC based on non-IO model
Control output for MPC based on IO model
800 900 1000 1100 1200 1300
48
50
52
54
Figure 7: Step response
0 1000 2000 3000 4000 5000 60000
20
40
60
80
Time (s)
Wa
ter
ba
th t
em
pe
ratu
re (
oC
) Set-point
MPC based on non-IO model
MPC based on IO model
0 1000 2000 3000 4000 5000 6000-50
0
50
100
150
Time (s)
Du
ty c
ycle
of
PW
M s
ign
al (%
)
Control output for MPC based on non-IO model
Control output for MPC based on IO model
900 1000 1100 1200
48
50
52
54
2400 2600 2800
58
60
62
4500 4600 4700 4800
44
46
48
Figure 8: Servo response
10
International Journal of Pure and Applied Mathematics Special Issue
406

0 1000 2000 3000 4000 5000 60000
20
40
60
80
Time (s)
Wate
r bath
tem
pera
ture
( o
C ) Set-point
MPC based on non-IO model
MPC based on IO model
0 1000 2000 3000 4000 5000 60000
20
40
60
80
100
120
Time (s)
Duty
cycle
of P
WM
sig
nal (%
)
Control output for MPC based on non-IO model
Control output for MPC based on IO model
2400 2600 2800
48
50
52
4400 4600 4800
48
50
52
Figure 9: Regulatory response
Fig. 8 show the servo responses for the MPC obtained fromboth integer and non-integer model, for the step change of 50◦C to60◦C at t=2000 seconds once it stabilizes at 50◦C and 60◦C to 40Cat t=4000 seconds once it stabilizes at 60◦C, along with the controlsignal profile also. Fig. 9 gives the regulatory response for thesame, when a positive and negative disturbance of 20% with respectto set-point are applied at t=2000 seconds and t=4000 secondsrespectively. Investigation of the different closed loop response asshown in Fig. 7, 8 & 9 and the data of Table IV, point out the
Table 4: Performance Indices value
Performance IndicesMPC basedon IO model
MPC basedon non-IOmodel
Peak time (tp) 1130 s 1020 sRise time (tr) 750 s 900 sMaximum overshoot (Mp) 3% 0.8%Settling time (ts),±2% 1200 s 900 sISE 7.835e+5 7.820e+5IAE 2.21e+4 2.15e+4
11
International Journal of Pure and Applied Mathematics Special Issue
407

same fact that performance for the class of controllers obtainedusing non-integer order model is better in every aspect than thoseobtained from integer order model in model based control.
7 Conclusion
Based on real time open loop data collected using Data Acqui-sition Card (DAC), models of water bath temperature system isestimated. Not only integer order model but also non-integer ordermodel is estimated as the later one proves to be efficient in captur-ing the dynamics of real plant, thus reducing model error. Thesemodels are then used for predictions in MPC. Through results ob-tained from various simulations performed in Matlab, it is deducedthat MPC designed based on non-integer order model gives bettercontrol performance as compared to integer order model.
References
[1] O. P. Verma, R. Singla, and R. Kumar, Intelligent tempera-ture controller for water-bath system, In: International Jour-nal of Computer, Electrical,Automation, Control and Informa-tion Engineering, 6 (2012), 1178-1184.
[2] Cooking in food industry, [Online].Available: http://wiki.zero-emissions.at/index.php?title=Cooking in food industry.
[3] C. A. Monje, B. M. Vinagre, D. Xue, and V. Feliu, Fractional-order Systems and Controls:Fundamentals and Applicationsser. Advances in Industrial Control, Springer-Verlag, London(2010).
[4] A. S. Elwakil, Fractional-order circuits and systems: Anemerging interdisciplinary research area, In: IEEE Circuitsand Systems Magazines, 10 (2010), 40-50.
[5] M. O. Efe, Fractional order systems in industrial automation:a survey, In: IEEE Transactions on Industrial Informatics, 7(2011), 582-591.
12
International Journal of Pure and Applied Mathematics Special Issue
408

[6] S. Kumar, A new fractional modeling arising in engineering sci-ences and its analytical approximate solution, In: AlexandriaEngineering Journal, 52 (2013), 813-819.
[7] A. Tepljakov, E. Petlenkov, and J. Belikov,Fomcon: a matlabtoolbox for fractionalorder system identification and control,In: International Journal of Microelectronics and ComputerScience, 2 (2011), 51-62.
[8] Lm35 precision centigrade temperature sensors, [Online].Available:http://www.ti.com/lit/ds/symlink/lm35.pdf.
[9] U3 datasheet, [Online]. Available: http://labjack.com/sites/default/files/LabJack-U3- Datasheet-Export-20160108.pdf.
[10] Solid state relay g3mb, [Online]. Available: http://www.electronica60norte.com/mwfls/pdf/g3mb-202.pdf.
[11] J. holland, Adaptation in natural and artificial systems: anintroductory analysis with applications to biology, control, andartificial intelligence, University of Michigan Press,(1975).
[12] D. E. goldberg, Genetic Algorithms in Search, Optimization,and Machine Learning, Ser. Artificial Intelligence, Addison-Wesley Publishing Company,(1989).
[13] D. Seborg, D. Mellichamp, T. Edgar, and F. Doyle, ProcessDynamics and Control,John Wiley & Sons,(2010).
[14] J. B. Rawlings,Tutorial overview of model predictive control,In: IEEE Control Systems, 20 (2000), 38-52.
[15] M. M. Joshi, V. A. Vyawahare, and M. D. Patil,Model predic-tive control for fractional-order system a modeling and approx-imation based analysis, In: 2014 4th International ConferenceOn Simulation And Modeling Methodologies, Technologies AndApplications (SIMULTECH),Vienna, Austria, (2014), 361-372.
[16] D. Xue, C. Zhao and Y. Chen, A Modified ApproximationMethod of Fractional Order System, In: International Con-ference on Mechatronics and Automation,Luoyang, Henan,(2006), 1043-1048.
13
International Journal of Pure and Applied Mathematics Special Issue
409

410






![url: Special Issue ijpam.eu A Complete ...acadpubl.eu/jsi/2017-114-5/articles/2/31.pdf · used to generalize the behavior of genetic approach [3]. In most of the evolutionary and](https://img.pdfslide.net/doc/110x75/5fca082978ee2152410fe4bd/url-special-issue-ijpameu-a-complete-used-to-generalize-the-behavior-of-genetic.jpg)






















