Embed Size (px)
Citation preview

Periodic Review Inventory Control With Lost Sales
and Fractional Lead Times
Ganesh Janakiraman
IOMS-OM Group, Stern School of Business, New York University.
e-mail: [email protected]
John A. Muckstadt
School of Operations Research and Industrial Engineering, Cornell University.
e-mail: [email protected]
October 2004
Subject Classification: Inventory/Production - periodic review, lost sales, lead times.

Abstract
We introduce a single location periodic review inventory control problem with lost sales
and fractional lead times. We model the optimal inventory control problem as a stochastic
dynamic program and analyze properties of the objective function as well as the optimal
policy. We present upper and lower bounds on the optimal policy. These bounds can readily
be used in easily computable heuristics. In addition to these heuristics, we also analyze
properties of the system when order-up-to S policies are used. We prove the convexity
of the cost function with respect to the order-up-to parameter S. We use this convexity
property to determine the best order-up-to levels for this system using bisection search. Our
computational investigation reveals that the deviation from the optimal cost is less than
1.5% on an average for both the “upper-bound heuristic” and the best order-up-to S policy.

1 Introduction
Consider the following replenishment problem that retail and grocery stores face. Inventory
of a product is reviewed periodically (say weekly or daily) and replenishment orders can be
placed at the beginning of each period (week or day). In many cases, the replenishment
lead times are shorter in length than a period; for example, grocery stores might order re-
plenishment stock late each afternoon and this stock might arrive the next day. In these
environments, being out of stock of a product when it is demanded typically leads to a lost
sale. In this paper, we study an inventory control problem that represents such environments.
We study a single-item, single-location system served by a supply source with infinite
availability of inventory. The system is reviewed periodically and orders can be placed at
the beginning of every period. The replenishment lead time is random but shorter than
the length of a period. In both parts of the period, that is, before and after delivery, any
demand in excess of available inventory is lost. Correlation between demands in the two
parts of the period is permitted. We model this control problem as a dynamic program. We
prove important properties of the cost function and the optimal ordering quantity function.
Using these properties, we derive functions that bound the optimal ordering quantity func-
tion on both sides. We also present results from computational experiments that indicate
the effectiveness of using these bounds as heuristic policies. In addition, we present some
analysis of order-up-to policies and investigate their performance in this setting.
Apart from the example of retail and grocery stores given in the opening paragraph,
similar problems also arise in service parts supply chains, which motivate this study. For
example, the service parts supply chain of a major automobile manufacturer consists of three
tiers or echelons. Automobile and service parts dealers form the bottom echelon, parts dis-
tribution centers (PDCs) comprise the next echelon, and, parts plants form the top echelon.
Each dealer’s source of supply is a unique “regional” PDC. Each dealer sends out orders
to its regional PDC every afternoon. The PDC processes these orders and sends a truck
1

with the ordered inventory to the dealer. This inventory reaches the dealer the subsequent
morning. Service level expectations are very high in this business. Consequently, if a dealer
and its regional PDC do not possess the required amount of inventory to meet customer
demand on some day, the demand at the dealer is met by an emergency supply source. This
supply source is usually another dealer in the same region or the PDC closest to the regional
PDC or a parts plant itself. Needless to say, the emergency supply activity is significantly
more expensive compared to the regular supply. Every unit demanded at a dealer in excess
of regular supply (dealer’s inventory and regional PDC’s inventory) is a “lost sale” in the
sense that this demand does not reduce the inventory at the dealer or the regional PDC. In
some sense, the cost of each unit “lost” is the incremental cost to the system as a result of
resorting to the more expensive emergency supply activity.
In both the cited examples (service parts supply chains and the retail industry), thou-
sands of parts or stock keeping units are stored in inventory. Further, demand forecasts are
created periodically and these forecasts change through time. These two facts imply that
any useful heuristic for inventory procurement would necessarily have to be computationally
efficient and capable of being executed in virtually real-time. We develop computationally
attractive heuristics based on the inverse of the CDFs (cumulative distribution functions)
of random variables representing demand; for commonly used distribution functions like the
normal and gamma, these functions are available in standard spreadsheet software like Ex-
cel. These direct non-recursive heuristics perform very well when compared with the optimal
solutions obtained using the dynamic programming model.
We present a review of related literature in section 2. The optimal control problem is
formally defined as a stochastic dynamic program in section 3. Section 3.1 contains a list
of assumptions and section 3.2 contains a discussion of myopic policies in order to build
some intuition for structural results that are derived subsequently. The structural results for
the optimal control problem are stated in section 3.3. In section 4, base-stock policies are
2

considered and some properties of the system under such policies are discussed. We present
computational results in section 5 and present concluding remarks in section 6.
In the following sections, we use “policy” to mean a function that prescribes an order
quantity based on the current inventory status. We use “increasing” and “decreasing” in the
weak sense.
2 Literature Review
The classical newsvendor problem is a special case of our problem where all the lead times
are zero. It is well known that a base-stock policy is optimal for such a problem and that the
policy is such that the probability of not stocking out is a fractile (that depends on the cost
parameters) of the one-period demand distribution. However, there is no such nice structure
for those problems with lost sales and positive lead times; lost sales problems with lead times
are far less tractable analytically than their backorder counterparts. Consequently, there are
very few papers that contain analytic results for periodic review problems with lost sales and
positive lead times.
In their seminal paper, Karlin and Scarf (1958) analyzed such a problem for a single
location system. They proved some basic properties about the optimal policy with the as-
sumption that the lead time of all orders is exactly one period. However, they did not provide
a method for computing the optimal order quantities.
Later, Morton (1969) generalized these basic results to periodic review lost sales prob-
lems with arbitrary, but fixed lead times that are integer multiples of the period’s length. In
addition, he developed easily computable bounds on the optimal order quantity for a given
inventory vector (the vector of the quantities of inventory in different stages of the pipeline).
Subsequently, Morton (1971) proposed and evaluated myopic policies as effective heuristics
3

for these problems.
We extend the work of Karlin and Scarf (1958) and Morton (1969) by analyzing the
optimal inventory control problem for a single item, single location, lost-sales problem with
lead times that are random and shorter in length than a period. Our model also has the
following features: (i) non-stationarity of demand throughout a period and (ii) correlation of
demand within a period. Our development of bounds on the optimal policy follows closely
the approach of Morton (1969).
Nahmias (1979) considered more general periodic review lost sales problems that include
fixed ordering costs, partial backordering and random lead times. He developed myopic poli-
cies for these problems and investigated their effectiveness. In addition, for problems with
lead times greater than two periods, he proposed using (s,S) policies, or order-up-to-S poli-
cies when the fixed cost is zero. Since the analytic determination of the best policy, among
the class of such (s,S) or order up to S policies, may not be possible, he used simulation to
determine the best policies.
Kapalka et al. (1999) analyze a problem that is closely related to the one examined in
this paper. They consider the class of (s,S) policies for a single location, single item periodic
review inventory model with lost sales and service level constraints. The lead time is a frac-
tion of a period. Fixed ordering costs are present. A simple lower bound for S is obtained.
A theoretical upper bound was not obtained; however, they use a safety-stock estimate to
get an upper bound that is adequate in practice. The optimal (s, S) pair is determined by
searching over the grid formed using the bounds on S. They developed efficient updating
procedures of the transition matrix that help in reducing the computational effort. It should
be noted that (s, S) policies are not optimal for lost sales problems with fixed ordering costs.
In fact, even when fixed ordering costs are zero, order-up-to policies are not optimal. Their
4

work was motivated by a potential application for a retail supply chain.
In this paper, we also examine the class of order-up-to policies. We prove that the ex-
pected finite horizon discounted cost is a convex function of the order-up-to parameter. Due
to this convexity result, we can determine the optimal order-up-to parameter using bisection-
search.
The convexity of the cost function has been established for other lost sales problems with
positive lead times when an order-up-to policy is followed. Downs et al. (2001) assume an
arbitrary but fixed lead time that is an integer multiple of the period’s length. They prove
this convexity result and use it to develop a linear program to determine optimal order-up-
to stocking levels for multiple products in the presence of budget constraints. Janakiraman
and Roundy (2004) assume random integer lead times with no order-crossing and show the
convexity result.
All the papers that we have mentioned so far study periodic review inventory control
problems. There is some literature on continuous review inventory models with lost sales,
for example, Hill (1999), Johansen (2001), Johansen and Thorstenson (1996), Smith (1977)
and Posner and Mohebbi (1998).
A key fact to be noted is that fractional lead times are not usually considered in the
inventory theory literature. As mentioned earlier, several examples with such lead times
and lost sales can be found in service parts chains, retail systems and grocery chains. For
problems with backorders, it is trivial to extend results obtained with integral lead times to
the case of fractional lead times. With lost sales, however, the analysis with fractional lead
times is challenging.
5

3 The Optimal Inventory Control Problem: Structural
Results
Assume that there are N periods in the planning horizon which we index in a backward
fashion, (i.e.) period N − 1 occurs after period N , and period 1 is the last period in the
planning horizon. Linear holding and lost sales costs are present; linear purchase costs can
be assumed to be zero without loss of generality as shown for general distribution and assem-
bly systems with lost sales and/or backorders in Janakiraman and Muckstadt (2004) when
lead times are integers. (See Janakiraman and Muckstadt (2001) for a proof of this result
for the model analyzed in this paper. In order to use this result, however, we need the as-
sumption that inventory at the end of the planning horizon is salvaged at the purchase price.)
Let us now state the notation that is used in this section. We use =d to denote definitions.
α =d discount factor .
xn =d on-hand inventory at the beginning of period n .
x0 =d on hand inventory at the end of period 1.
qn =d quantity ordered in period n .
Dn1 =d random variable representing the demand that occurs between
the start of period n and the time the order of size qn is received.
Dn =d random variable representing the total demand that occurs in period n .
Dn2 =d Dn − Dn1
= the random variable representing the demand that occurs between
the time that we receive the order of size qn and the end of period n .
Dn =d the random vector (Dn1, Dn2) .
yn =d on-hand inventory just after receiving qn .
= (xn − Dn1)+ + qn .
6

h =d holding cost incurred per unit of inventory
(charged at the beginning of a period) .
b =d lost sales cost incurred for every unit of sales lost during a period
(charged at the beginning of a period) .
Figure 1 goes here
The dynamics of the system’s operation are depicted in Figure 1. The timing of events
and the manner in which costs are incurred are critical to our analysis. Each period is linked
to the following one through the evolution of the on-hand inventory at the beginning of a
period. The equation that describes this relationship from period n to n − 1 is given by
xn−1 = ((xn − Dn1)+ + qn − Dn2)
+. (3.1)
Next, we define the one-period cost and the expected discounted cost. Note that all the
expectation operators in this section will be subscripted with the set of random vectors or
variables over which the expectation is taken.
Vn(xn, qn) =d expected period n holding and lost sales costs if we
start period n with xn units of inventory on hand
and we order qn units
= EDn
[
h · xn + b · (Dn1 − xn)+ + b · (Dn2 − yn)+]
. (3.2)
fn(xn) =d minimum expected sum of all discounted future costs
over the planning horizon if we start period n with
xn units of inventory on hand
= minqn≥0
{
Vn(xn, qn) + α · EDn
[fn−1(((xn − Dn1)+ + qn − Dn2)
+)]}
. (3.3)
fn(xn, qn) =d minimum expected sum of all discounted future costs if
we start period n with xn units of inventory on hand
and if we order qn units in period n
7

= Vn(xn, qn) + α · EDn
[fn−1(((xn − Dn1)+ + qn − Dn2)
+)] . (3.4)
q∗n(x) =d arg minq≥0
(fn(x, q)) , and therefore
fn(x) = fn(x, q∗n(x)).
In addition to these costs incurred in periods N , N − 1, . . ., 1 there is an end of horizon cost
f0(x0) which depends on x0, the inventory on hand at the end of period 1. Specifically,
f0(x0) =d cost incurred at the end of the horizon, (i.e.) the end of period 1
= h · x0 . (3.5)
The finite horizon problem is to determine the optimal policy, that is, the function q∗n(x),
for all n ∈ {N, N − 1, . . . , 1} and for all x ≥ 0.
3.1 Assumptions
The following conditions are assumed throughout the section.
1. 0 ≤ α ≤ 1.
2. The cost parameters satisfy the relation b ≥ h.
3. {Dn} =d{(Dn1, Dn2)} is a sequence of i.i.d. random vectors. Correlation between Dn1
and Dn2 is allowed.
4. All the random variables representing demand possess positive continuous density func-
tions on [0,∞). Let us now define the necessary probability density functions and cumulative
distribution functions.
φ1(u1) =d the probability density of Dn1 at u1.
Φ1(u1) =d the cumulative distribution function of Dn1 at u1
= P ( Dn1 ≤ u1 ).
φ2(u2) =d the probability density of Dn2 at u2.
Φ2(u2) =d the cumulative distribution function of Dn2 at u2
= P ( Dn2 ≤ u2 ).
8

φ(u) =d the probability density of Dn at u.
Φ(u) =d the cumulative distribution function of Dn at u
= P ( Dn ≤ u ).
Φ ∗ Φ1(u) =d P ( Dn + Dn−1,1 ≤ u ).
Φ1(u1) =d the complementary cumulative distribution function of Dn1 at u1
= 1 − Φ1(u1).
Φ2(u2) =d the complementary cumulative distribution function of Dn2 at u2
= 1 − Φ2(u2).
Φ̃(u) =d P (Dn2 + D(n−1)1 ≤ u).
φ12(u1, u2) =d joint probability density function of Dn at (u1, u2).
The randomness in the lead time is captured in the probability density function
of Dn = (Dn1, Dn2).
3.2 Myopic Policies
Before analyzing the optimal control problem, we will briefly study myopic policies. By
myopic policy, we mean a policy that minimizes expected costs over only that period where
the ordering decision has an immediate cost impact. Such policies are easy to determine and
are usually useful in giving a “first cut” idea about the dynamic program and the structure
of its optimal policy.
We define the myopic cost of ordering q units when x is the current inventory on hand as
Cmy(x, q) =d bE[(Dn2 − ((x − Dn1)+ + q))+] + αbE[(D(n−1)1 − ((x − Dn1)
+ + q − Dn2)+)+]
+ αhE[((x − Dn1)+ + q − Dn2)
+] . (3.6)
The first term is the expected lost sales cost in the second part of a period; the second
term is the expected lost sales cost in the first part of the next period; and the last term is
9

the expected holding cost at the beginning of the next period. It can be verified that this
function is strictly convex and that the optimal myopic ordering quantity q, given x, is the
solution to
−(1 − α)bP ((x − Dn1)+ + q ≤ Dn2) − αbP ((x − Dn1)
+ + q ≤ Dn2 + D(n−1)1)
+ αhP ((x − Dn1)+ + q ≥ Dn2) = 0 , when one exists and 0 otherwise.
Let qmy(x) denote this myopic policy. Let us now consider two special cases of our problem.
In the first case the lead time is exactly zero, and in the second case it is exactly one period.
We now have:
(i) when lead time = 0, qmy(x) =d min{q ≥ 0 : P (x + q ≥ Dn) ≥ b/(b + αh)} , and
(ii) when lead time = 1, qmy(x) =d min{q ≥ 0 : P ((x − Dn)+ + q ≥ Dn−1) ≥ (b − h)/b} .
Notice that whenever qmy(x) > 0 in these two cases, the myopic policy equalizes the proba-
bility of not stocking out before the next receipt of inventory to the constants b/(b+αh) and
(b − h)/b, respectively. There are two reasons why such a structure is useful: (i) it tells us
what service level we can achieve while using this policy and (ii) it is fairly easy to construct
upper and lower bounds on the myopic policy from this structure.
We might hypothesize that the optimal policy for the dynamic program model would also
be a policy that maintains a constant probability of not stocking out. Optimal base-stock
policies for problems with backordering have this nice property. Unfortunately, the hypoth-
esis is not true for problems with lost sales and positive lead times. This was demonstrated
by Morton (1968) for the case when the lead time is exactly one period long. However, we
will show in the following subsection that the probability of not stocking out while using the
optimal policy is bounded between two constants that depend on the parameters b, h and α.
We will use these bounds to develop computationally efficient heuristic approximations for
the optimal policy. But first, we establish properties of the value function and the optimal
ordering policy.
10

3.3 Properties of the Optimal Ordering Function
Our goal in this section is to prove several properties of the optimal policy q∗n and the dis-
counted cost function fn. The results proved are in the following order.
In Theorem 1, we demonstrate the strict convexity of fn(x). Further, we show that there
is a critical quantity x̄n such that it is optimal to order nothing if xn exceeds x̄n and to order
a positive amount, otherwise. The optimal policy q∗n(x) is strictly decreasing in x, as long
as it is optimal to order something, and the rate of decrease is smaller than 1.
The next important result (Theorem 2) we prove is that the probability of not stocking
out while using the optimal policy is bounded between two constants that depend on b, h
and α. To prove this result, however, we need to establish some bounds on f′
n(x) first, and
this is done in Lemma 1.
The bounds on the probability of not stocking out are then used to establish easily com-
putable bounds on the optimal policy. This is done in Lemma 2.
The proofs of these results can be found in the Appendix.
Theorem 1 For any period 1 ≤ n ≤ N ,
(a) f′′
n (x) > 0 , (3.7)
(b) limx→∞
f′
n(x) > 0 , (3.8)
(c) Fn(x, q) =d
∂fn(x, q)
∂qincreases with q ∀ x ≥ 0 , (3.9)
(d) f′
n(x) ≥ h − b , (3.10)
(e) ∃ x̄n such that q∗n(x) > 0 if and only if x < x̄n ; also, Fn(x̄n, 0) = 0 , (3.11)
(f) −1 <dq∗n(x)
dx< 0 ∀ 0 ≤ x ≤ x̄n , (3.12)
(g) f′
n(x̄n) = h . (3.13)
11

Next, we derive upper and lower bounds on the derivative of fn, which are useful in
constructing bounds on the probability of not stocking out while using the optimal policy.
Lemma 1
−(b + αh − h) + (b + αh)Φ1(x) ≤ f′
n(x) ≤ (h − b) + (b + αh)Φ1(x), ∀ x ∈ (0, x̄n), ∀ n ≥ 1 .
We can now construct bounds on the probability of not running out of stock in the interval
of time between the receipt of two successive orders while following the optimal policy.
Let π∗n(x) =d P ((x − Dn1)
+ + q∗n(x) ≥ Dn2 + D(n−1)1)
= P (x > Dn1, x + q∗n(x) − Dn1 ≥ Dn2 + D(n−1)1)
+ P (x < Dn1, q∗n(x) ≥ Dn2 + D(n−1)1) .
The following theorem gives bounds on the probability of not stocking out while using
the optimal policy. Let L =db−h
b+αhand U =d
bb+αh
.
Theorem 2
L ≤ π∗n(x) ≤ U , ∀ x ∈ (0, x̄n) , ∀ n ≥ 2 .
Two interesting observations can be made that link the service levels of the myopic policy
and the optimal policy. When the lead time is zero, the myopic policy is also the optimal
policy. Intuitively, the service level attained by the optimal policy when the lead time is zero
should be an upper bound on the service level attained by the optimal policy when the lead
time is positive. This is indeed true as was established in Theorem 2. The link between the
lower bound stated in Theorem 2 and the myopic policy is less obvious. Assume that the
lead time is one period. Modify the myopic cost to include that part of the expected holding
cost two periods from now which is directly caused by the decision q; that is, consider the
“modified myopic cost”
αhE[(x−Dn)+ + q] + αbE[(Dn−1 − ((x−Dn)+ + q))+] + α2hE[((x−Dn)+ + q−Dn−1)+] .
It is easy to verify that minimizing this “modified myopic cost” leads to a policy that at-
tains the service level L, which is the lower bound established in Theorem 2. The modified
12

myopic cost defined above is more conservative than the original myopic cost in the sense
that excess inventory is penalized more. Consequently, it is intuitive that the optimal policy
attains a higher service level than the policy obtained by minimizing this modified cost.
Incidentally, it can be verified that this “modified myopic cost” function is the same as
f2(x, q)− h · x− b ·E(D2 − x)+ (recall that we assume the lead time is one period here); so,
the order quantity that minimizes this function is q∗2(x).
Next, we state easily computable bounds on the optimal order quantity q∗n(x). All these
bounds are derived from Theorem 2 in a straightforward way. For example, since (x−Dn1)+
≥ 0 and the results of Theorem 2 hold, P (q∗n(x) ≥ Dn2 + D(n−1)1) ≤ U . This gives the first
bound. The other bounds are derived in a similar fashion.
Lemma 2
(i) q∗n(x) ≤ Φ̃−1(U).
(ii) ∀ x for which 0 ≤ x ≤ x̄n, q∗n(x) ≤ (Φ ∗ Φ1)−1(U) − x.
(iii) q∗n(x) ≥ Φ̃−1(L) − x.
(iv) x + q∗n(x) ≥ (Φ ∗ Φ1)−1[
L − Φ1(Φ̃−1(U))Φ1(x)
]
.
(v) x̄n ≥ (Φ ∗ Φ1)−1(L).
Thus we have developed a series of bounds on the optimal order quantity q∗n(x). These
bounds will be used in the heuristics we describe subsequently. Observe that the first upper
bound is a constant while the second upper bound defines a base-stock policy. Similarly, the
first lower bound defines a base-stock policy while the second is a more complicated function.
In our numerical examples, presented in section 5, we observe that for small values of x the
“base-stock like” upper bound is inferior to the other upper bound while the “base-stock
like” lower bound is superior to the other lower bound. For higher values of x, the other
bounds dominate. These examples also suggest that the effective upper bound (minimum of
the two upper bounds) is much closer to the optimal policy than the effective lower bound
(maximum of the two lower bounds).
13

4 Base Stock Policies : A Convexity Result
We now consider a particular class of policies, the “base-stock” or “order-up-to S” policies.
Although such policies are not optimal, they are often used in practice because they are easy
to implement. One interesting research question is “how well do such policies perform?”
Another equally important and interesting question is “how do we determine the value of S,
the order-up-to level, that minimizes the cost among this class of policies?”. The latter is
the issue that we address in this section; the former we study subsequently.
In the absence of simple analytic methods to determine the optimal value of S, it is
common to use simple search techniques in combination with simulation to decide on a value
of S. Recently, “infinitesimal perturbation analysis” has been advocated as an effective and
efficient technique for computing stock levels (see Glasserman and Tayur (1995)). However,
these techniques can be guaranteed to yield optimal solutions only if the cost function is
known to be convex. With this as the motivation, we next prove the convexity of the dis-
counted cost function for our finite horizon problem in the parameter S. Convexity results
for other lost-sales inventory problems using base-stock policies are available in Downs et al.
(2001) and Janakiraman and Roundy (2004).
Lead times and demands are still stochastic. However, we will prove that the cost is
convex with respect to S for any realization of lead times and demands.
Let us fix a realization of lead times and demands. Let xn(S) =d on hand inventory at the
beginning of period n, qn(S) =d order placed in period n which equals S − xn(S), and, ln(S)
=d the amount of lost sales in period n, when an order-up-to policy with parameter S is used.
Assume xN (S) = S, that is, the system starts with S units of inventory on-hand. Now
we write recursive equations describing the evolution of the on-hand inventory through time.
Subsequently, we show that the on-hand inventory at the beginning of any period can be
14

seen to be a piecewise linear function of S. Then we show that the cost incurred in period
n is a linear combination of S and xn−1(S). The combination of these results implies that
the discounted cost function is a piecewise linear function in S. Lastly, these results will be
shown to imply the desired convexity result.
At the beginning of a period, just prior to the time an order is placed, all the inventory
in the system is on hand. As soon as the order is placed, the inventory position takes the
value S. Hence, xn−1(S) can be computed as the inventory position at the beginning of the
previous period, S, less the total depletion in inventory in the previous period, (Dn-ln(S)).
Thus,
xn−1(S) = S − (Dn − ln(S)), or ln(S) = Dn + xn−1(S) − S. (4.14)
An interesting property of xn(S) is that it is a piecewise linear function of S. As we will
see, xn(S) has a slope of 0 or 1 in all its linear segments and it also always lies between 0
and S. To obtain these results, we prove the following Lemma.
Lemma 3
(a) xn(S) is piecewise linear in S.
(b) x′
n(S) ∈ {0, 1} wherever xn(·) is differentiable.
(c) 0 ≤ xn ≤ S.
Proof : We use a proof by induction. Observe that
xn−1(S) = [(xn(S) − Dn1)+ + qn(S) − Dn2]
+
= [S − (Dn2 + min(xn(S), Dn1))]+
using the identity (a−b)+ = a − min(a, b). It is easy to establish the three statements in the
Lemma for xn−1(S) using the statements for xn(S). Please see Janakiraman and Roundy
(2004) for a detailed proof of this result when lead times are integers; the proof here is
15

virtually the same. Q.E.D.
Define the one period cost function in period n to be
vn(S) =d h · xn−1(S) + b · ln(S) , that is (4.15)
vn(S) = (h + b)xn−1(S) − b · S + b · Dn . (4.16)
Compare this definition with definition (3.2) in section 3. The definition of the one-period
cost function in (4.15) is the same as (3.2) without the expected value operator, except for
the following difference. The holding cost for the on-hand inventory at the end of period
n (beginning of period n − 1) is charged in period n in (4.15) whereas it was charged pro-
portional to the inventory on hand at the beginning of period n in (3.2). We define the
cost function vn this way purely for algebraic simplicity. We are interested in proving the
convexity of the function∑N
n=1 αN−nvn(S).
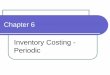
Figure 2 goes here.
In the graph above (see Figure 2), we have generated plots of xn(S) for a particular
example. It can be observed from the figure that the individual xn(·) functions are not
convex. However, it can be observed that at any point where the slope of xn(·) drops from
1 to 0 for some n, we can find some n′
< n such that the slope of xn′ (·) increases from 0
to 1. This observation can be formalized and used to prove that∑m
n=0 xn(S) is a piecewise
linear function whose slope is increasing. The convexity of the cost function follows directly
from this fact. Such a proof is available in Janakiraman and Muckstadt (2001). That proof
is long and complicated; but, there is a simpler way of proving the convexity result, which
we will present next. To prove the convexity conjecture, we first state
Lemma 4: Let {am} be a non-negative, increasing sequence. For any realization of demands
{(Dn1, Dn2)} and any n, the function∑N
m=n am · xm(S) is convex.
The proof is given in the Appendix.
16

The convexity of the discounted cost function is a simple corollary of Lemma 4.
Corollary 1∑N
m=1 αN−mvm(S) is convex in S.
Proof : Application of Lemma 4 with am =d αN−m shows that∑N
m=1 αN−mxm−1(S) is con-
vex. Consequently, equation (4.16) implies that∑N
m=1 αN−mvm(S) is convex. Q.E.D.
Thus the discounted cost function is convex in S for every realization of the sequence of
random variables {(Dn1, Dn2)}. We exploit the convexity of this function in the next section
to find the best order-up-to S policy using a bisection search.
5 Computational Investigation
In this section, we describe computational experiments used to investigate the performance
of heuristics derived directly from bounds developed in section 3.3 and the performance of
the best order-up-to policy.
Even though we proved our analytic results only for finite horizon models, similar results
hold for the infinite horizon discounted cost and infinite horizon average cost models; the
proofs for the infinite horizon, average cost case would involve some tedious technical discus-
sions which we have avoided in the interest of space. For our computational investigation,
we chose the infinite horizon average cost to compare the performance of policies in our
environment due to the following reason. If we use a finite or an infinite horizon discounted
cost performance measure, we would have to decide the starting state, that is, the on hand
inventory in the first period; we would then be left with the question of how sensitive the
comparison of the policies is to the starting state. The infinite horizon average cost model
does not have this issue.
17

We use two distributions for modeling demands (Dn1, Dn2). In the first model, we assume
that the distribution of (Dn1, Dn2) is bivariate normal. In the second model, we assume that
Dn1 and Dn2 are stochastically independent and each of these is a random variable with
a gamma distribution. The bivariate normal and gamma distribution were chosen for the
following reasons: (a) the lower and upper bounds we have developed use the inverse CDFs
of the demand distributions, and these inverse CDFs are readily available for the gamma
and the normal distributions in Excel; (b) the bivariate normal is useful to investigate the
effect of correlation between demands in the first and second parts of the period; (c) the
gamma distribution has a heavier tail than the normal and it is interesting to see how the
performance of the heuristics vary depending on which distribution is used.
The cost parameters we use are b/h ∈ {5, 25, 100}. We use the following demand param-
eters:
(i) Bivariate Normal: Dn1 has mean µ1 and standard deviation σ1, Dn2 has a mean µ2
and standard deviation σ2, and the two random variables have a correlation of ρ. The pa-
rameter values that we used are: (µ1, µ2) ∈ {(10, 20), (20, 10)}; if (µ1, µ2) = (10,20), σ1 ∈
{1.75, 3.5, 7}, σ2 ∈ {4, 8, 12} and if (µ1, µ2) = (20,10), σ1 ∈ {4, 8, 12}, σ2 ∈ {1.75, 3.5, 7}; ρ
∈ {−0.5, 0, 0.5}.
(ii) Gamma: β = 20, α1 ∈ {0.25, 0.5, 1, 2}, α2 ∈ {0.25, 0.5, 1, 2}.
In total, with all the possible cost parameters, we had 162 sets of parameter values with
the bivariate normal distribution and 48 sets of parameter values with the gamma distribu-
tion.
We chose three heuristics for performance evaluation. The first heuristic policy uses the
least of the two upper bounds derived in section 3.3 as the order quantity. That is, the
amount ordered in any period that starts with x units of inventory on hand equals UB(x),
18

where
UB(x) =d [min(Φ̃−1(U), (Φ ∗ Φ1)−1(U) − x)]+ .
The second heuristic is the analogous policy based on the lower bounds derived earlier.
That is, the amount ordered in any period that starts with x units of inventory on hand
equals LB(x) where
LB(x) =d max{ lb(y) : y ≥ x } and
lb(x) =d
[
max(Φ̃−1(L) − x, (Φ ∗ Φ1)−1[
L − Φ1(Φ̃−1(U))Φ1(x)
]
− x)]+
.
Here, lb(x) is the maximum of the two lower bounds at x. However, lb(x) is not monotone.
We exploit the fact that the optimal policy is a decreasing function of x to tighten this lower
bound with our definition of LB(x).
The third heuristic is a base-stock or order-up-to policy according to which qS(x) units
are ordered if a period starts with x units of inventory where
qS(x) =d (S∗ − x)+ and
S∗ is the “best” order-up-to level. S∗ was determined using a bisection search procedure.
For each policy, the evolution of the starting inventory level in a period is a Markov chain
with a transition matrix that depends on the policy. Starting with a uniform distribution
of the inventory level, we used the transition matrix corresponding to the policy to com-
pute the probability distribution of the starting inventory level in the twentieth period. We
verified that this distribution was an accurate proxy for the steady state distribution. This
“steady-state” distribution was used to compute the infinite horizon average cost.
For more details on the computational experiments, please see the appendix. It is worth
noting that we used the upper and lower bounds to limit our search for the optimal policy.
Surprisingly, the optimal policy was significantly close to the upper bound policy in most
19

cases. This helped in reducing the computational effort in determining the optimal policy
considerably.
The heuristic policies and the optimal policy for two examples are plotted in figures 3
and 4.
Figures 3 and 4 go here.
We present the results for the upper bounding heuristic (UB) and the best order up to
policy (S∗) in Tables 1-8. We omit the results corresponding to the lower bounding heuristic
because its performance is significantly inferior to the other policies. The table heading and
the column and row headings specify the parameters. The entries in Tables 1-4 and 6-7 are
the average percentage difference in costs between each heuristic (UB/S∗) and the optimal
policy. Tables 5 and 8 summarize the overall performance of the heuristics with the mini-
mum, maximum and average percentage errors over all the experiments for the normal and
gamma distribution cases, respectively.
Tables 1 - 8 go here.
The average optimality gaps of the UB heuristic are 0.76% and 2.14% for the normal and
gamma distribution cases, respectively. The maximum differences from the optimal costs are
3.38% and 7.21%, respectively. The S∗ policy has average differences of 0.8% and 0.5% and
maximum differences of 2.85% and 1.8% from the optimal costs for the normal and gamma
distribution cases, respectively. A major reason for the optimality gap being so small when
we use these heuristics is the flatness of the cost curves around the optimal solution. To
illustrate this idea, we have plotted fn(x, q) as a function of q for two values of x for one of
our test examples in Figure 5. We can observe from the plot that though the order quantities
suggested by the heuristics are not very close to the optimal quantities, the costs are almost
20

identical to the optimal cost.
Figure 5 goes here.
We observe that the performance of both heuristics improves as the b/h ratio increases.
When the demand distribution is bi-variate normal, as ρ increases, the performance of the UB
heuristic is unaffected, while the performance of the order-up-to policy deteriorates. There
does not seem to be any other strong trend in the performance of either of the heuristics
with respect to the problem parameters.
To summarize these results, it appears that both the UB heuristic and the best order-
up-to policy both perform very well. However, the UB heuristic is easy to implement using
spreadsheet functions, whereas it is necessary to use a search procedure, each step of which
involves policy evaluation, to determine the best order-up-to level.
6 Conclusions
We have examined a single location periodic review inventory control problem with lost sales
and fractional lead times. This work was motivated by applications in service part supply
chains and retail chains; emergency orders in the former example and product stock-outs in
the latter are much better modeled as lost sales rather than backorders. Research directed
at inventory control problems with lost sales and lead times is scarce. Among the few papers
that consider such problems, Morton (1969)’s is a significant one, and our work benefits
considerably from his analysis of lost sales problems with integer lead times.
We model the optimal inventory control problem as a stochastic dynamic program and
analyze properties of the objective function as well as the optimal policy. We present upper
and lower bounds on the optimal policy. These bounds are based on the inverse cumulative
distribution functions of some demand random variables and are very easy to compute.
21

These computations are direct and non-recursive, and, these bounds are easily implementable
heuristics in practice. In addition to these heuristics, we also analyze properties of the system
when order-up-to S policies are used. The main result we prove in this setting is the convexity
of the cost function with respect to the order-up-to parameter S. In our experiments, we
use this convexity property to determine the best order-up-to levels for this system using
bisection search. Our computational investigation reveals that the “upper-bound heuristic”
and the best order-up-to S policy both perform very well. In fact, on an average, they are
only 1.45% and 0.66% more expensive than the optimal policy, which is computationally
intensive to determine in large scale problems.
7 Appendix 1: Description of Computational Experi-
ments
1. Truncation/Discretization of demands: In the experiments with the gamma distribu-
tions, demands are truncated at 250. All probabilities in this range are scaled up
uniformly to sum up to one. In the experiments with the normal distributions, the
vector of demands in the two parts of a period is restricted to be in the Cartesian
product of {0, 1, . . . , 100} and {0, 1, . . . , 100}. The probability mass at some integer
pair (u, v) for this discrete distribution is a constant multiplied by the joint density of
the bi-variate normal distribution at (u, v), where the constant is chosen such that the
masses add up to one.
2. Lower and Upper Bounds: Since LB(x) and UB(x) might not be integers, we used the
floor of LB(x) and the ceiling of UB(x) as the lower and upper bounds on the optimal
order quantity, respectively.
3. Policy Evaluation: We are interested in finding a close approximation for the long run
average cost performance of different policies. Starting from a uniform distribution
of states, the actual probability distribution of on hand inventory after 20 periods,
22

given any policy, is computed. In our computational experiments, we observe that
the probability distribution of on hand inventory changes negligibly after 20 periods.
Therefore, we use this distribution as the proxy for the steady state distribution. The
long run average cost attained by this policy is then found using its “proxy steady
state distribution”.
4. Finding the Optimal Policy: One way to determine the optimal policy for the average
cost performance measure is to find the optimal policies with the infinite horizon dis-
counted cost measure for a sequence of discount factors converging to one. However,
this process is computationally very intensive. Instead, we take the following approach.
Using a discount factor of one, we compute the optimal policies for finite horizon prob-
lems of increasing length until the policies converge. We take the “converging policy”
as an approximation for the optimal policy with respect to the long run average cost
performance measure.
5. Finding the Optimal Base-stock Level: We perform a bisection search to find the
optimal base-stock level. For a given base-stock level, we compute the performance by
finding a proxy for the steady state distribution of on hand inventory levels as described
under “Policy Evaluation”.
23

8 Appendix 2: Proofs
Proof of Theorem 1: Our proof is by induction. Recall that f0(x) = h·x. Thus statements
(b) and (d) are trivially true for f0; also, we have f′′
0 (x) = 0 for all x. Now, we assume that
the statements (b) and (d) in the theorem are true for functions f0, f1, . . . , fn−1 and that all
these functions are convex. Now, let us show that all the statements (a) - (f) are true for
period n as well.
Next, to simplify notation, let
θ(x) =d ((x − Dn1)+ + q∗n(x) − Dn2),
θ1(x) =d x − Dn1 + q∗n(x) − Dn2,
θ2(x) =d q∗n(x) − Dn2 .
That is, θ(x), θ1(x) and θ2(x) are random variables that depend on Dn1 and Dn2. We use
1(·) to denote the indicator function of an event (·).
From (3.2) and (3.4), we get
fn(x, q) = h · x + b · EDn
[(Dn1 − x)+] + b · EDn
[(Dn2 − ((x − Dn1)+ + q))+]
+α · EDn
[fn−1(((x − Dn1)+ + q − Dn2)
+)].
Differentiating this expression with respect to q, we get
Fn(x, q) = α · EDn
[f′
n−1((x − Dn1)+ + q − Dn2) · 1((x − Dn1)
+ + q − Dn2 > 0)]
−b · P ((x − Dn1)+ + q < Dn2) (8.17)
= −b∫ x
u1=0
∫ ∞
u2=x−u1+qφ12(u1, u2) du2du1 − b
∫ ∞
u1=x
∫ ∞
u2=qφ12(u1, u2) du2du1
+α∫ x
u1=0
∫ x−u1+q
u2=0f
′
n−1(x − u1 + q − u2)φ12(u1, u2) du2du1
+α∫ ∞
u1=x
∫ q
u2=0f
′
n−1(q − u2) φ12(u1, u2) du2du1. (8.18)
24

Let us now compute the derivatives of Fn(x, q) w.r.t. x and q.
∂Fn(x, q)
∂x= b
∫ x
u1=0φ12(u1, x − u1 + q)du1 + α
∫ x
u1=0f
′
n−1(0)φ12(u1, x − u1 + q)du1
+ α∫ x
u1=0
∫ x−u1+q
u2=0f
′′
n−1(x − u1 + q − u2)φ12(u1, u2)du2du1
≥ (b + αh − αb)∫ x
u1=0φ12(u1, x − u1 + q)du1 > 0 .
∂Fn(x, q)
∂q= b
∫ x
u1=0φ12(u1, x − u1 + q)du1 + b
∫ ∞
u1=xφ12(u1, q)du1
+ α∫ x
u1=0
∫ x−u1+q
u2=0f
′′
n−1(x − u1 + q − u2)φ12(u1, u2)du2du1
+ α∫ x
u1=0f
′
n−1(0)φ12(u1, x − u1 + q)du1
+ α∫ ∞
u1=x
∫ q
u2=0f
′′
n−1(q − u2)φ12(u1, u2)du2du1
+ α∫ ∞
u1=xf
′
n−1(0)φ12(u1, q)du1 > 0.
The inequalities above are obtained by using the facts that f′
n−1(x) ≥ (h− b) and f′′
n−1(x) ≥
0. We have now shown that Fn(x, q) is strictly increasing in both x and q. Using statement
(b) for n− 1, it can also be seen that Fn(x, q) is strictly positive in the limit as q approaches
∞ for any given x. Since Fn(x, q) is strictly increasing in q, q∗n(x) equals zero if Fn(x, 0)
≥ 0 and q∗n(x) is the unique solution to the first order condition Fn(x, q) = 0, otherwise
(continuity of Fn(x, q) ensures the existence of such a solution). As a consequence of these
results, we know that
∃x̄n such that q∗n(x) > 0 if and only if x < x̄n.
The continuity and monotonicity properties of Fn(·, ·) also let us define x̄n more precisely as
the unique solution to the equation
Fn(x, 0) = 0 .
Thus we have shown statements (c) and (e). Before proving the other statements, we
derive a useful expression for f′
n(x) by differentiating both sides of the expression fn(x) =
fn(x, q∗n(x)). We use (3.2)-(3.4) and the fact that [∂fn(x, q)/∂q]q=q∗n(x) = Fn(x, q∗n(x)) = 0
25

when q∗n(x) > 0 and (∂q∗n(x)/∂x) = 0, otherwise.
f′
n(x) =dfn(x, q∗n(x))
dx= [∂fn(x, q)/∂x]q=q∗
n(x) + [∂fn(x, q)/∂q]q=q∗
n(x)(∂q∗n(x)/∂x)
= h − b · P (x < Dn1) − b · P (x > Dn1, θ1(x) < 0)
+α · EDn
[f′
n−1((θ(x))+)1(x > Dn1, θ(x) > 0)] (8.19)
= h − b · Φ1(x) − b ·∫ x
u1=0
∫ ∞
u2=x−u1+q∗n(x)
φ12(u1, u2) du2 du1
+ α ·∫ x
u1=0
∫ x−u1+q∗n(x)
u2=0[ f
′
n−1(x + q∗n(x) − u1 − u2)φ12(u1, u2) du2 du1 ] . (8.20)
Evaluating this expression above at x = 0, we get
f′
n(0) = h − b . (8.21)
Now, we prove statement (g), that is, f′
n(x̄n) = h by using the relations Fn(x̄n, 0) = 0
(using the first order condition since q∗n(x̄n) = 0 and q∗n(x) > 0 if x < x̄n) and (8.19). From
(8.17), we get
0 = Fn(x̄n, 0) = −bP (x̄n < Dn1 + Dn2) + αE[f′
n−1(x̄n − Dn)1(x̄n > Dn)] .
From (8.19), we get
f′
n(x̄n) = h − bP (x̄n < Dn1) − bP (x̄n > Dn1, x̄n < Dn1 + Dn2) + αE[f′
n−1(x̄n − Dn)1(x̄n > Dn)] .
Combining these two equations we can see that f′
n(x̄n) = h.
Next, we prove statement (f). To do this, we exploit the fact that Fn(x, q∗n(x)) = 0 ∀ x
∈ [0, x̄n]. Let H(x) =d Fn(x, q∗n(x)). Thus dHdx
= 0, 0 ≤ x ≤ x̄n. However,
dH
dx=
(
∂Fn(x, q)
∂x
)
q=q∗n(x)
+
(
∂Fn(x, q)
∂q
)
q=q∗n(x)
(
∂q∗n(x)
∂x
)
, when 0 ≤ x ≤ x̄n .
Using expressions developed earlier for the partials of Fn, we get
dH
dx= (b + α · f
′
n−1(0))
(
1 +∂q∗n(x)
∂x
)
∫ x
u1=0φ12(u1, x − u1 + q∗n(x)) du1
26

+(b + α · f′
n−1(0))
(
∂q∗n(x)
∂x
)
∫ ∞
u1=xφ12(u1, q
∗n(x)) du1
+α∫ x
u1=0
∫ x−u1+q∗n(x)
u2=0[f
′′
n−1(x + q∗n(x) − u1 − u2)φ12(u1, u2) du2du1
·(1 +∂q∗n(x)
∂x)]
+α∫ ∞
u1=x
∫ q∗n(x)
u2=0f
′′
n−1(q∗n(x) − u2)
(
∂q∗n(x)
∂x
)
φ12(u1, u2) du2du1
in the region 0 ≤ x ≤ x̄n.
Note that (b + α · f′
n−1(0)) > 0 (by statement (d) for n-1) and f′′
n−1(·) ≥ 0. This implies that
−1 <dq∗n(x)
dx< 0 , ∀ 0 ≤ x ≤ x̄n
since the equation dHdx
= 0 can now be seen to take the form
0 = (positive term) ·
(
1 +dq∗n(x)
dx
)
+ (positive term) ·
(
dq∗n(x)
dx
)
.
Thus we have proved statement (f).
Next, we prove that f′′
n (x) is strictly positive. First, we differentiate both sides of equation
(8.20) we get
f′′
n (x) = b · φ1(x) + b ·∫ x
u1=0φ12(u1, x − u1 + q∗n(x)) du1 · (1 +
dq∗n(x)
dx)
−b ·∫ ∞
u2=q∗n(x)
φ12(x, u2) du2
+α ·∫ x
u1=0
∫ x−u1+q∗n(x)
u2=0
[
f′′
n−1(x + q∗n(x) − u1 − u2) · (1 +dq∗n(x)
dx)
]
·φ12(u1, u2) du2 du1
+ α ·∫ x
u1=0
[
f′
n−1(0)φ12(u1, x − u1 + q∗n(x)) · (1 +dq∗n(x)
dx)
]
du1
+α ·∫ q∗
n(x)
u2=0f
′
n−1(q∗n(x) − u2) φ12(x, u2) du2. (8.22)
Observe from equation (8.22) and statements (d) and (f) that f′′
n (x) is strictly positive
for n ≥ 1. In other words, fn(x) is strictly convex, n ≥ 1.
27

Recall from (8.21) that f′
n(0) = h − b and from statement (g) that f′
n(x̄n) = h. State-
ments (b) and (d) are direct consequences of these facts and the strict convexity of fn.
We have now proved all the statements listed in the theorem. Q.E.D.
Proof of Lemma 1 : Before getting into the details, it will be useful to recognize some
basic inequalities which are derived directly from Theorem 1. Define q̄n to be q∗n(0). As a
consequence of (3.7) and (3.12) we have the following:
0 ≤ q∗n(x) ≤ q̄n, and x ≤ x + q∗n(x) ≤ x̄n, 0 ≤ x ≤ x̄n. (8.23)
x1 < x2 if and only if f′
n(x1) < f′
n(x2). (8.24)
Recall that f′
n(x̄n) = h. The two inequalities stated in the theorem are now obtained
easily using (8.19).
First, we derive the upper bound formula for f′
n(x). First, we use the fact that f′
n(·) is
an increasing function in (8.19) to get
f′
n(x) ≤ h− b P (x < Dn1)− b P (x > Dn1, θ1(x) < 0) + αE[f′
n−1(x̄n)1(x > Dn1, θ(x) > 0)] .
Since f′
n(x̄n) = h, we can rewrite this inequality as
f′
n(x) ≤ h − b + (b + αh)P (x > Dn1, x − Dn1 + q∗n(x) > Dn2) .
The right hand side of the above inequality is clearly less than (h− b) + (b+αh)Φ1(x). This
is the upper bound for f′
n(x).
Next, we derive the lower bound. To do this, we will be manipulating (8.17) and (8.19).
Using the fact that Fn(x, q∗n(x)) = 0 when x ≤ x̄n along with (8.17), we get
αE[f′
n−1(θ(x))1(θ(x) > 0)] = bP (θ(x) < 0) .
28

Manipulating (8.19) using the above equality, it can be verified that
f′
n(x) = h−b P (x < Dn1, q∗n(x) > Dn2) − α EDn
[f′
n−1(q∗n(x)−Dn2)1(x < Dn1, q
∗n(x) > Dn2)].
Since f′
n−1(·) is an increasing function and f′
n−1(x̄n) = h, we can see that the right hand side
is bounded below by −(b + αh− h) + Φ1(x)(b + αh), which is the lower bound stated in the
theorem. Q.E.D.
Proof of Theorem 2 : First, it is useful to rewrite π∗n(x) as
π∗n(x) = EDn
ED(n−1)1
[
1((x − Dn1)+ + q∗n(x) − Dn2 ≥ D(n−1)1)
]
= EDn
(
Φ1((x − Dn1)+ + q∗n(x) − Dn2)
)
. (8.25)
Both inequalities will be established by using Lemma 1 and the relation Fn(x, q∗n(x)) =
0 ∀ x ∈ (0, x̄n). The sequence of steps is as follows: (i) consider equation (8.17) and the
expression Fn(x, q∗n(x)) = 0, (ii) use Lemma 1 to eliminate f′
n−1 from this statement, (iii)
we would then have an inequality with zero on one side and an expression that depends
only on h, b, α and the distribution functions of demand, (iv) substitute some probability
expressions with alternate expressions that bound the original probabilities from below or
above.
First, we derive the upper bound.
0 = Fn(x, q∗n(x))
= −bP ((x − Dn1)+ + q∗n(x) < Dn2) + αEDn
[f′
n−1((θ(x))+)1(θ(x) > 0)]
= −bP (θ(x) < 0) + αEDn
[f′
n−1(θ(x))1(θ(x) > 0)]
= −b + EDn
[
(b + α · f′
n−1(θ(x)))1(θ(x) > 0)]
≥ −b + EDn
[(b + α · [(h − b − α · h) + Φ1(θ(x))(b + α · h)])1(θ(x) > 0)]
(using Lemma 1)
= −b + EDn
EDn−1[(b + α · (h − b − α · h)
29

+ α(b + α · h)1(D(n−1)1 < θ(x)))1(θ(x) > 0)]
(because Φ1(θ(x)) = P (D(n−1)1 < θ(x)) = EDn−1[1(D(n−1)1 < θ(x))])
≥ −b + EDn
EDn−1[(b + α · (h − b − α · h)
+α(b + α · h)1(D(n−1)1 < θ(x)))1(θ(x) > D(n−1)1)]
(because 1(θ(x) > 0) ≥ 1(θ(x) > D(n−1)1))
= −b + (b + α · h)P (θ(x) > D(n−1)1)
= −b + (b + α · h)P ((x − Dn1)+ + q∗n(x) − Dn2 > D(n−1)1)
= −b + (b + α · h)π∗n(x) .
Therefore, we have π∗n(x) ≤ b
b+αh.
To prove the other inequality, we again start with the expression Fn(x, q∗n(x)) = 0.
0 = Fn(x, q∗n(x))
= −b + bP ((x − Dn1)+ + q∗n(x) > Dn2) + αEDn
[f′
n−1((θ(x))+)1(θ(x) > 0)]
= −b + EDn
[(b + αf′
n−1((x − Dn1)+ + q∗n(x) − Dn2))
·1((x − Dn1)+ + q∗n(x) > Dn2)]
≤ −b + EDn
[(b + α(h − b) + α(b + αh)Φ1((x − Dn1)+ + q∗n(x) − Dn2))
·1((x − Dn1)+ + q∗n(x) > Dn2)]
(using Lemma 1)
≤ −b + EDn
[b + α(h − b) + α(b + αh) · Φ1((x − Dn1)+ + q∗n(x) − Dn2)]
( since 1((x − Dn1)+ + q∗n(x) > Dn2) ≤ 1
and (b + α(h − b) + α(b + αh) · Φ1((x − Dn1)+ + q∗n(x) − Dn2)) ≥ 0)
= α(h − b) + α(b + αh)π∗n(x)
( using equation (8.25) ).
Therefore, π∗n(x) ≥
b − h
b + αh. Q.E.D.
30

Proof of Lemma 2(i):
Φ̃(q∗n(x)) = P (D(n−1)1 + Dn2 ≤ q∗n(x))
≤ P (D(n−1)1 + Dn2 ≤ (x − Dn1)+ + q∗n(x))
= π∗n(x) ≤ U. Q.E.D.
Proof of Lemma 2(ii):
Φ ∗ Φ1(x + q∗n(x)) = P (Dn1 + Dn2 + D(n−1)1 ≤ x + q∗n(x))
= P (Dn2 + D(n−1)1 ≤ x − Dn1 + q∗n(x))
≤ P (Dn2 + D(n−1)1 ≤ (x − Dn1)+ + q∗n(x))
= π∗n(x) ≤ U. Q.E.D.
Proof of Lemma 2(iii) :
L ≤ π∗n(x) = P ((x − Dn1)
+ + q∗n(x) ≥ Dn2 + D(n−1)1)
≤ P (x + q∗n(x) ≥ Dn2 + D(n−1)1) = Φ̃(x + q∗n(x)). Q.E.D.
When x = 0, q∗n(0) = q̄n; consequently,
q̄n ≥ Φ̃−1(L).
Proof of Lemma 2(iv) :
L ≤ π∗n = P (x ≥ Dn1, x + q∗n(x) ≥ Dn1 + Dn2 + D(n−1)1)
+ P (x ≤ Dn1, q∗n(x) ≥ Dn2 + D(n−1)1)
≤ Φ ∗ Φ1(x + q∗n(x)) + P (x ≤ Dn1, q∗n(x) ≥ D(n−1)1)
= Φ ∗ Φ1(x + q∗n(x)) + Φ1(x)Φ1(q∗n(x))
≤ Φ ∗ Φ1(x + q∗n(x)) + Φ1(x)Φ1(Φ̃−1(U)),
since Φ̃(q∗n(x)) ≤ U . Q.E.D.
31

Proof of Lemma 2(v): Recall that by definition q∗n(x̄n) = 0 and π∗n(x̄n) = πn(x̄n, 0). But
π∗n(x̄n) = P (x̄n ≥ Dn1 + Dn2 + D(n−1)1)
= (Φ ∗ Φ1)(x̄n) ≥ L. Q.E.D.
Proof of Lemma 4: The proof is by induction. The statement is trivially true when n =
N since xN(S) = S. Assume the statement is true for some n ≥ 1. We will now show the
convexity of∑N
m=n−1 am · xm(S).
N∑
m=n−1
amxm(S) =N∑
m=n
amxm(S) + an−1xn−1(S)
=N∑
m=n
amxm(S)
+ an−1 max(0, S − Dn2 − xn(S), S − Dn2 − Dn1) .
The right hand side of the above equation can also be expressed as
max(N∑
m=n
amxm(S), an−1(S − Dn2) +N∑
m=n+1
amxm(S) + (an − an−1)xn(S),
an−1(S − Dn2 − Dn1) +N∑
m=n
amxm(S) ) .
Each of the three terms within the “max” operation is convex by our inductive assumption.
(Note that the sequence {an − an−1, an+1, an+2, . . . , aN} is a non-negative and increasing
sequence. This implies the convexity of the second term within the “max” operation.)
Since the maximum of convex functions is convex, the expression above is convex and so is∑N
m=n−1 am · xm(S). Q.E.D.
References
Downs, B., Metters, R., and Semple, S. (2001), “Managing Inventory with Multiple Products,
Lags in Delivery, Resource Constraints and Lost Sales: A Mathematical Programming
Approach,” Management Science, 47(3), 464–479.
32

Glasserman, P. and Tayur, S. (1995), “Sensitivity Analysis for Base-stock Levels in Multi-
echelon Production-inventory Systems,” Management Science, 41(2), 263–281.
Hill, R. (1999), “On the suboptimality of (S-1, S) lost sales inventory policies,” International
Journal of Production Economics, 59, 387–393.
Janakiraman, G. and Muckstadt, G. (2001), “Some Analytic Results For A Periodic Review
Lost Sales Problem,” Technical report 1283, School of Operations Research and Industrial
Engineering, Cornell University.
Janakiraman, G. and Muckstadt, J. (2004), “Inventory Control In Directed Networks: A
Note on Linear Costs,” Operations Research, 52(3), 491–495.
Janakiraman, G. and Roundy, R. (2004), “Lost-Sales Problems with Stochastic Lead Times:
Convexity Results For Base-Stock Policies,” Operations Research, 52(5), 795–803.
Johansen, S. (2001), “Pure and modified base-stock policies for the lost sales inventory
system with negligible set-up costs and constant lead times,” International Journal of
Production Economics, 71, 391–399.
Johansen, S. and Thorstenson, A. (1996), “Optimal (r,q) inventory policies with Poisson
demands and lost sales: discounted and undiscounted cases,” International Journal of
Production Economics, 46-47, 359–371.
Kapalka, B., Katircioglu, K., and Puterman, M. (1999), “Inventory Control In a Retail
Environment with Lost Sales , Service Constraints and Fractional Lead Times,” Production
and Operations Management , 8, 393–408.
Karlin, S. and Scarf, H. (1958), “Inventory Models Of The Arrow-Harris-Marschak Type
With Time Lag,” Studies in the Mathematical Theory of Inventory and Production, 155–
178.
Morton, T. (1968), The Fixed Lag Periodic Review Inventory Problem With Proportional
Costs And No Demand Backlogging, Ph.D. dissertation, The University of Chicago.
33

Morton, T. (1969, Oct.), “Bounds on the Solution of the Lagged Optimal Inventory Equation
with no Demand Backlogging and Proportional Costs,” SIAM Review , 11(4), 572–596.
Morton, T. (1971, Nov.-Dec.), “The Near-myopic Nature of the Lagged-Proportional-Cost
Inventory Problem With Lost Sales,” Operations Research, 19(7), 1708–1716.
Nahmias, S. (1979, Sept.-Oct.), “Simple Approximations for a Variety of Dynamic Leadtime
Lost-Sales Inventory Models,” Operations Research, 27(5), 904–924.
Posner, M. and Mohebbi, E. (1998), “A Continuous-Review Inventory System with Lost
Sales and Variable Lead Times,” Naval Research Logistics, 45, 259–278.
Smith, S. (1977), “Optimal Inventories for an (S-1,S) system with no backorders,” Manage-
ment Science, 23, 522–528.
34

B(n-1)A(n-1)BnAn
Demand=D(n-1)1
Demand=Dn2
Beginning of period nOn Hand Inventory = xn
Place order for qn units
Beginning of period n-1On Hand Inventory = xn-1
Place order for qn-1 units
qn
Demand= Dn1
Demand=D(n-1)2
qn-1
qn-2
Beginning of period n-2On Hand Inventory = xn-2
Place order for qn-2 units
Shipment qn
arrives.Inventory = yn
Shipment qn-1
arrives.Inventory = yn-1
Figure 1: Dynamics of the order/demand process
0
5
10
15
20
25
30
35
40
0 5 10 15 20 25 30 35 40
S
x5(S)
x4(S)
x2(S)
x3(S)
x1(S)x0(S)
S=1 S=9 S=11 S=14 S=21 S=23 S=28
Figure 2: Plots of xn versus S.
35

0
50
100
150
200
250
300
0 16 32 48 64 80 96 112
128
144
160
176
192
208
224
240
256
x: inventory level at the start of a period
Order size
LB(x)
UB(x)
q*(x)
qS(x)
Dn1 =d Gamma(2,20), Dn2 =d Gamma(2,20), b/h = 100
Figure 3: Heuristic and Optimal Policies: Demand distribution - Gamma
36

0
10
20
30
40
50
60
70
80
90
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80
Order size
Dn1 =d N(20,8), Dn2 =d N(10,3.5), ρ = 0.5, b/h = 100
x: inventory level at the start of a period
LB(x)
UB(x)
q*(x)
qS(x)
Figure 4: Heuristic and Optimal Policies: Demand distribution - Bi-variate
Normal
37

0
100
200
300
400
500
600
700
0 3 6 9 12 15 18 21 24 27 30 33 36 39 42 45 48 51 54
q
x = 0 x = 10
q*(10) = 35 UB(10) = 45
qS(10) = 40
q*(0) = 41
UB(0) = 45
qS(0) = 50
Cost Curves: Dn1 ∼d Gamma(.25,20), Dn2 ∼d Gamma(.25,20), b/h = 25
fn(x,q)
Figure 5: Cost Curves: Dn1 ∼d Gamma(.25,20), Dn2 ∼d Gamma(.25,20), b/h =
25
38

Table 1: Normally Distributed Demand - (µ1, µ2) = (10, 20): % Differences in Costs
of Heuristic and Optimal Policies Averaged Over 9 Cases (b/h ∈ {5, 25, 100} and ρ ∈
{−0.5, 0.0, 0.5})
σ2 4 8 12
σ1
1.75 UB 0.76 0.41 0.12
S∗ 0.48 0.61 0.55
3.5 UB 1.20 0.58 0.23
S∗ 0.65 0.74 0.65
7 UB 0.81 0.44 0.23
S∗ 1.24 1.14 1.11
Table 2: Normally Distributed Demand - (µ1, µ2) = (20, 10): % Differences in Costs
of Heuristic and Optimal Policies Averaged Over 9 Cases (b/h ∈ {5, 25, 100} and ρ ∈
{−0.5, 0.0, 0.5})
σ2 1.75 3.5 7
σ1
4 UB 1.21 .77 .33
S∗ 0.46 0.48 0.70
8 UB 1.47 1.18 0.74
S∗ 0.73 0.75 0.87
12 UB 1.24 1.10 0.95
S∗ 1.05 1.04 1.17
39

Table 3: Normally Distributed Demand: % Differences in Costs of Heuristic and Optimal
Policies Averaged Over All 54 Cases for each ρ
ρ -0.5 0.0 0.5
UB 0.76 0.72 0.82
S∗ 0.43 0.82 1.16
Table 4: Normally Distributed Demand: % Differences in Costs of Heuristic and Optimal
Policies Averaged Over All 54 Cases for each b/h
b/h 5 25 100
UB 1.69 0.42 0.20
S∗ 1.44 0.59 0.39
Table 5: Normally Distributed Demand: % Differences in Costs of Heuristic and Optimal
Policies Over All 162 Cases
UB S∗
Minimum 0.0013 0.005
Average 0.76 0.80
Maximum 3.38 2.85
40

Table 6: Gamma Distributed Demand (β = 20): % Differences in Costs of Heuristic and
Optimal Policies Averaged Over 3 Cases (b/h ∈ {5, 25, 100})
α2 0.25 0.5 1 2
α1
0.25 UB 3.31 1.86 0.93 0.54
S∗ 0.34 0.23 0.13 0.08
0.5 UB 3.7 2.43 1.53 0.70
S∗ 0.60 0.49 0.34 0.21
1.00 UB 3.43 2.84 1.95 1.24
S∗ 0.81 0.75 0.64 0.49
2.00 UB 3.12 2.74 2.20 1.69
S∗ 0.84 0.84 0.82 0.76
Table 7: Gamma Distributed Demand (β = 20): % Differences in Costs of Heuristic and
Optimal Policies Averaged Over All 16 Cases for each b/h
b/h 5 25 100
UB 4.19 1.49 0.74
S∗ 1.10 0.34 0.13
Table 8: Gamma Distributed Demand (β = 20): % Differences in Costs of Heuristic and
Optimal Policies Over All 48 Cases
UB S∗
Minimum 0.08 0.03
Average 2.14 0.52
Maximum 7.21 1.80
41