Embed Size (px)
Citation preview

Intel Serv Robotics (2011) 4:17–38DOI 10.1007/s11370-010-0080-5
SPECIAL ISSUE
Planetary rovers’ wheel–soil interaction mechanics: newchallenges and applications for wheeled mobile robots
Liang Ding · Zongquan Deng · Haibo Gao ·Keiji Nagatani · Kazuya Yoshida
Received: 26 March 2010 / Accepted: 30 October 2010 / Published online: 16 December 2010© Springer-Verlag 2010
Abstract With the increasing challenges facing planetaryexploration missions and the resultant increase in the per-formance requirements for planetary rovers, terramechanics(wheel–soil interaction mechanics) is playing an importantrole in the development of these rovers. As an extension ofthe conventional terramechanics theory for terrestrial vehi-cles, the terramechanics theory for planetary rovers, whichis becoming a new research hotspot, is unique and puts for-ward many new challenging problems. This paper first dis-cusses the significance of the study of wheel–soil interactionmechanics of planetary rovers and summarizes the differ-ences between planetary rovers and terrestrial vehicles andthe problems arising thereof. The application of terramechan-ics to the development of planetary rovers can be dividedinto two phases (the R&D phase and exploration phase forrovers) corresponding to the high-fidelity and simplified ter-ramechanics models. This paper also describes the currentresearch status by providing an introduction to classical ter-ramechanics and the experimental, theoretical, and numericalresearches on terramechanics for planetary rovers. Theapplication status of the terramechanics for planetary roversis analyzed from the aspects of rover design, performanceevaluation, planetary soil parameter identification, dynamicssimulation, mobility control, and path planning. Finally, thekey issues for future research are discussed. The current plan-etary rovers are actually advanced wheeled mobile robots
L. Ding · Z. Deng · H. Gao (B)Harbin Institute of Technology, Harbin, Chinae-mail: [email protected]; [email protected]
K. Nagatani · K. YoshidaDepartment of Aerospace Engineering, Tohoku University,Sendai 980-8579, Japan
(WMRs), developed employing cutting-edge technologiesfrom different fields. The terramechanics for planetary roversis expected to present new challenges and applications forWMRs, making it possible to develop WMRs using the con-cepts of mechanics and dynamics.
Keywords Terramechanics · Planetary rover · Design andperformance evaluation · Soil parameter identification ·Dynamics simulation · Control
1 Introduction
Since the successful landing of US rover Sojourner on Marsin 1997 [1], there has been an upsurge of planetary explora-tion missions using wheeled mobile robots (WMRs) aroundthe world. The twin rovers, Spirit and Opportunity, have beenexploring Mars for more than six years and have made manysignificant discoveries [2,3]. Many new missions involvingplanetary rovers are underway for the exploration of Mars[4,5] and the moon [6]. These rovers are required to traversechallenging rough and deformable terrains to achieve theirscientific goals such as looking for evidence of life and inves-tigating the origin of solar system.
The current planetary exploration rovers are actuallyadvanced WMRs, developed employing cutting-edge tech-nologies from different fields to achieve excellent per-formance. This has opened up many new frontier issuespertaining to WMRs, including the application of wheel–soilinteraction mechanics to the mechanical design, performanceevaluation, soil parameter identification, dynamics simula-tion, mobility control, path planning, etc., of WMRs.
The word “terramechanics” is compounded from thewords “terrain” and “mechanics”. It first appeared in Prof.Bekker’s book entitled “Off-road locomotion: research anddevelopment in terramechanics” in 1960 [7]. It has been
123

18 Intel Serv Robotics (2011) 4:17–38
widely accepted as a term denoting vehicle–terrain interac-tion mechanics after the International Society of Terrain–Vehicle Systems (ISTVS) started publishing its “Journal ofTerramechanics” in 1962. Terramechanics is mainly com-posed of two parts: the interaction mechanics between thetraveling mechanisms and the soil and that between the oper-ating machines and the soil (such as the mechanics of cut-ting, ripping, and pulverizing soil) [8]. The current researchon the terramechanics for planetary rovers primarily focuseson wheel–soil interaction mechanics.
The terramechanics for planetary rovers has attractedthe interests of not only the researchers studying conven-tional terrestrial vehicles, but also those developing mobilerobots. Traditional terramechanics researchers can exert theiradvantages in theory, experience, and experimental condi-tions, and provide researching methods and theoretical guid-ance. For example, Nakashima of the Agricultural SystemsEngineering Laboratory, Kyoto University, summarized thebasic concept and formulation of the discrete element method(DEM) and used it to analyze the performance of a luggedwheel for a lunar microrover, thereby proving the effective-ness of the DEM in the research on terramechanics of plan-etary rovers [9]. Ren et al. [10] from the Laboratory forTerrain-Machine Bionics Engineering (LTMBE), Jilin Uni-versity, China obtained a scheme for simulating the lunarenvironment on the basis of the research methods for terres-trial vehicles. Gao et al. [11] from the Department of Auto-mobile Engineering, Beijing University of Aeronautics andAstronautics, analyzed the application of terramechanics tothe designing of planetary rovers and in-situ soil parametermeasurement. They also summarized the research contentsand methods of terramechanics and introduced the conceptof model experiments based on the similarity theory [12].On the other hand, researchers from the mobile robot fieldhave been trying to apply the terramechanics theory for thedevelopment and research of planetary rovers, and put for-ward many new problems with great prospects. Moreover,they have carried out researches on terramechanics for plan-etary rovers by developing single-wheel testbeds and rovertestbeds, using the resources from WMRs such as advancedmeasuring sensors and data processing/fusion technologies,thereby providing new methods and techniques for terrame-chanics research.
The terramechanics for planetary rovers is a hot researchtopic, but currently in the budding stage; however, it isexpected to present new applications for WMRs and con-ventional vehicles by solving the new challenging problems.The development of this new field requires the cooperationof researchers from all the related fields, with complemen-tary academic backgrounds. From the standpoint of WMRs,this paper discusses the significance of terramechanics inthe development of planetary rovers, summarizes the cur-rent research status and application status of terramechanics
for planetary rovers, and presents an overview of some keyissues for future research.
2 Significance of terramechanics research indevelopment of WMRs, especially planetary rovers
As planetary rovers are particular cases of WMRs, theresearch on the wheel–soil interaction mechanics for plan-etary rovers has important theoretical value and applicationprospects.
1. Carrying out research on WMRs using the concepts ofmechanics is an inevitable technological developmenttrend, and the wheel–soil interaction mechanics is a bot-tleneck problem that needs to be solved. A mobile robotwith a locomotive base and a robotic arm with a fixedor floating base are two important categories of robots.Numerous studies have been carried out on robotic armssince their development, and researchers have a deep andcomprehensive understanding of both its kinematics anddynamics [13]. Mechanics is an important factor to beconsidered in the mechanical design, performance anal-ysis and evaluation, dynamics simulation, mobility con-trol, path following, path planning, etc., of robotic arms[14]. However, most of the past researches on WMRsdid not consider the mechanics of the WMRs to a suffi-cient extent, due to the consideration of complexity [15].With the continuous development of the robotic technol-ogy and the increase in the performance requirements forrobots, the mechanics-based research on mobile robotswill continue to be focused on in the future. The mechan-ics of WMRs can be divided into two parts: the multibodymechanics of the rover vehicle and the wheel–soil inter-action mechanics. The former is primarily rigid-bodymechanics, which has been developed very well. Thelatter actually involves complex hybrid rigid–flexiblemultibody issues. It is influenced by many factors: soilproperties, wheel characteristics, payload distributions,slip-sinkage, running states of wheels, etc. From the endof the last century, the advances in the planetary rovertechnology have promoted the development of WMRs inunstructured complex unknown environments includingthe research on wheel–soil interaction mechanics and itsapplication.
2. Solving the problems associated with planetary rovers onthe basis of terramechanics is important for improvingthe rover performance and ensuring the success of explo-ration missions. In the beginning, most planetary roverproblems were solved with less consideration of themechanics [16–18]. However, challenging explorationmissions in complex planetary environments have madeit necessary to take the wheel–soil interaction mechanics
123

Intel Serv Robotics (2011) 4:17–38 19
into account while researching and developing planetaryrovers. The surface of the moon is covered with a thickregolith layer composed of dust and rock clast. When arover moves across the rough lunar surface composed ofsuch deformable soil, severe slip sinkage and side slipof wheels take place, thereby resulting in a decrease inthe tractive performance of the vehicle and a deviationfrom the scheduled path, with the possibility of gettingstuck in the soil. The Mars rovers moving in sand havealso encountered similar problems. Slip sinkage is oneof the most important failure modes for planetary rovers.In 2005, the Opportunity rover got stuck in the soft Pur-gatory dune, and scientists spent about 5 weeks trying torelease it [19]. In January 2010, the Spirit rover was des-ignated a stationary science platform after efforts overseveral months to free it from sinking into the soft sandhave been unsuccessful [20]. It is impossible to under-stand the process of slip sinkage, lateral slip, and longi-tudinal slip without the knowledge of terramechanics.Even if the velocity of a rover is quite low, it is noteasy to get optimal results for problems such as high-fidelity simulation, accurate localization, path followingand mobility control, based only on kinematic informa-tion. Therefore, as an investment in “long term, high pay-off” technologies, the Mars Base Technology Programof the National Aeronautics and Space Administration(NASA), US, has initiated the research on rover naviga-tion and motion planning based on vehicle dynamics androver–terrain interaction [21].
3. The terramechanics for planetary rovers is an exten-sion and expansion of the conventional terramechanicsfor terrestrial vehicles, which could help in enrichingand developing the subject. There are many differencesbetween planetary rovers and terrestrial vehicles fromthe aspects of the running environment, control mode,payload, velocity, chassis configuration, wheel dimen-sions, running state, etc., which results in large dif-ferences in their terramechanics. Since conventionalvehicles are usually driven by human operators, it isunnecessary to apply the knowledge of terramechanicsto control and real-time simulation during their in-ser-vice phase. Therefore, classical terramechanics plays animportant role only in the R&D phase of a vehicle. In con-trast, terramechanics for planetary rovers can be appliednot only to the mechanical design and performanceevaluation during the R&D phase of a rover [22–24],but also to online soil parameter identification [25,26],dynamics simulation [27–31], mobility control [32,33],path following [34], and path planning [35] during theexploration phase. These extended applications raisemany new issues for terramechanics. Table 1 comparesthe differences between planetary rovers and terrestrialvehicles and the resulting influence on terramechanics.
As seen from this table, it is necessary to researchthe wheel–soil interaction mechanics of planetaryrovers based on the terramechanics for conventionalvehicles. The results may in turn be applied not onlyto WMRs, but also to conventional terrestrial vehicles.
3 Importance of the study of wheel–soil interactionmechanics for wheeled planetary rovers
3.1 What does terramechanics deal with?
The motion of a WMR is mainly determined by the wheel–soil interaction mechanics of its wheels, which can be usedto analyze the forces and moments acting on the wheel bythe soil.
The soil applies three forces and three moments to eachwheel, as shown in Fig. 1. The normal force, FN, can sustainthe wheel. The cohesion and shearing of the soil can gener-ate a resistance moment MR and a tractive force. The resis-tance force is produced by the forward part of the soil thathinders the motion of the soil because of the wheel sinkinginto the soil. The combination of the tractive and resistanceforces is called the drawbar pull, FDP, which is the effectiveforce driving a wheel. When a wheel steers or the terrain isrough, the direction of the wheel is not the same as that of thewheel’s velocity. The included angle is called the slip angleβ, which can produce a side force FS, a steering resistancemoment MS, and an overturning moment MO on the wheel.In Fig. 1, v is the linear velocity of the wheel and ω is itsangular velocity.
The wheel–soil interaction forces and moments are influ-enced by soil, terrain, wheel, and running state, which canbe calculated with Eq. (1):⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎩
FN = Fzw = FN(PS, PT, PW, PR)
FDP = Fxw = FDP(PS, PT, PW, PR)
FS = Fyw = FS(PS, PT, PW, PR)
MO = Mxw = MO(PS, PT, PW, PR)
MR = −Myw = MR(PS, PT, PW, PR)
MS = Mzw = MS(PS, PT, PW, PR)
(1)
where PS = {kc, kϕ, n, c, ϕ, K , ρ, c1, c2, c3}, PT = {At, Bt,
Ct}, PW = {r, b, h, γL(nL), βL}, and PR = {s, θ1(z), θ2, θm,
β, v, np}. PS includes the soil parameters; PT includes thenormal vector parameters of the simplified sloped terrainin the wheel–soil interaction area; PW includes the wheelparameters; while PR includes the running state parame-ters of a wheel. All the related parameters that influence thewheel–soil interaction are listed in Table 2.
The soil interacts with a wheel in the form of continuousnormal stress and shearing stress. The functions in Eq. (1) arequite complex as they are the integration of stresses, which
123

20 Intel Serv Robotics (2011) 4:17–38
Table 1 Differences between planetary rovers and terrestrial vehicles and their influence on terramechanics
Terrestrial Planetary Characteristics of New challengingvehicle rover terramechanics for problems
planetary rovers
Typical environment Relatively flat and hard roador off-road
Complex unknownplanetary environment(vacuum, radiation, highand low temperatures);deformable rough terrain
The wheel is prone to sink;the mechanics is complex;the soil parameters areinfluenced by ambientenvironment
Wheel–soil interactionmechanics in deformablerough terrain; online soilparameter identification
Control method Generally driven by ahuman operator
Unmanned, autonomouscontrol and tele- operation
Terramechanics-basedcontrol, real-timesimulation and remotetraversability judgmentare necessary
Wheel–soil interactionmechanics model forreal-time application andvision-basedterramechanics
Payload Larger than severalthousand newtons
Small payload, tens ofnewtons to thousands ofnewtons
The bearing performanceand shearing performanceof the soil are differentunder a small loadcompared to that under alarge load
Load effect of wheel–soilinteraction
Running velocity High speed, tens orhundreds of kilometersper hour
Low velocity, hundreds ofmeters per hour
The velocity can influencethe wheel–soil interactionmechanics and exit anglebecause of soilrebounding
The low velocity effect ofthe wheel–soil interactionand determination of exitangle
Slip sinkage Not so obvious Quite obvious The conditions of aconventional vehicleterramechanics model arenot satisfied, such asBekker’s compactionresistance model [36]; thelateral flow of sand isobvious; the stressesalong the wheel width arenot equal
Principle of slip sinkage;influence of slip ratio onwheel–soil interactionmechanics
Wheel
Radius Usually >500 mm Usually <500 mm Influence of wheeldimensions and lateralflow of sand onwheel–soil interaction
Width Relatively large Relatively small
Wheel lugs Small height and largecross-sectional area
Large height (generally notsmaller than 10 mm) withsmall cross-sectional area
The wheel lug has complexinteraction with the soiland it is infeasible tosimply use the maximumradius as the wheel radius
Influence of wheel lugs onstresses, concentratedforces and moments
Wheel form Cylindrical Cylindrical, spherical,cylindrical-conical,special forms
The stress distribution andslip ratio along the widthof a wheel are not thesame
Terramechanics for wheelswith different forms
are related to all the parameters. One of the most importantproblems that the terramechanics deals with is deducing thedetailed form of the functions in Eq. (1), in order to pre-dict the wheel–soil interaction mechanics with high-fidelity.If the wheel–soil interaction forces and moments can bemeasured or given, the other unknown parameters can besolved with the inverse functions of Eq. (1). For exam-ple, one can design the wheel parameters by determining
the mechanics according to the mission requirements of arover, identifying the soil parameters, or predicting the slipratio of a wheel by measuring the forces and moments. Theinverse functions for realizing the applications are not easyto deduce, which requires reasonable simplifications afteran in-depth analysis. All the related technologies such as ter-rain mapping, sensing, and information fusion should also bedeveloped.
123

Intel Serv Robotics (2011) 4:17–38 21
Moving direction
Wheel direction xw
Steering moment MS
Overturning moment MO
Slip angle
v
Drawbar pull FDP
Normal direction zw
Normal force FN
Side direction yw
Side force FS
Resistance moment MR
Fig. 1 Wheel–soil interaction mechanics
Table 2 Parameter description for wheel–soil interaction mechanics
Symbol Parameter and unit
kc Cohesive modulus of soil (kPa/mn+1)
kϕ Frictional modulus of soil (kPa/mn)
n Sinkage exponent of soil
c Cohesion of soil (kPa)
ϕ Internal friction angle of soil (◦)K Shearing deformation modulus of soil (m)
γ Bulk density of soil (N/m3)
c1, c2, c3 Coefficients of wheel–soil interaction angle
At, Bt, Ct Normal vector parameters of terrainquad in wheel–soil interaction area
r wheel radius (m)
b Wheel width (m)
h Height of lugs (m)
γL Space angle between lugs (◦), γL = 360/nL
nL Lug number
βL Inclination angle of lugs (◦)
s Slip ratio, s = (rω − v)/rω
θ1 Entrance angle (◦), θ1 = arcos[(r − z)/r ]z Wheel sinkage (m)
θ2 Exit angle (◦), θ2 = c3θ1
θm Angle of maximum stress (◦), θ3 = (c1 + c2s)θ1
β Slip angle (◦)v Wheel velocity (m/s)
np Passing times of wheels on the same terrain
3.2 How terramechanics is used for planetary rovers?
Wheel–soil interaction mechanics can be applied to both theR&D phase and the exploration phase of a planetary rover,as shown in Figs. 2 and 3.
During the R&D phase, a planetary rover could bedesigned and optimized on the basis of terramechanics con-cepts. With the help of a terramechanics-based high-fidelitydynamics simulation, the performance of a rover could be
Planetary enviorenment
Physical and mechanicalproperties of soil
Geometrical propertiesof terrain
Rover design(configuration, dimension,
wheel, energy, etc.)
Terramechanics
Missionrequirements
High-fidelitysimlation
Trafficability ManerverabilitySlop climbing
ability
Control strategy
Obstacle overcomingability
Fig. 2 Roles of terramechanics in R&D phase of planetary rovers
Planetary rover
Soil parametersidentification
High-speedsimulation
Missioncommands
Controlstrategy
Ter
ram
echa
nic s
Planetary environment
Physics and mechanicalproperties of soil
Geometrical propertyof terrain
Fig. 3 Roles of terramechanics in exploration phase for planetaryrovers
analyzed and evaluated comprehensively, and the controlstrategy could be verified with a virtual rover. In this pro-cess, the physical and mechanical properties of the planetarysoil and the geometrical characteristics of the terrain could betreated as known information. A typical terrain with knownsoil-property parameters can be constructed from the pri-ori knowledge obtained from previous planetary explorationmissions. Wheel–soil interaction mechanics models with suf-ficient fidelity are required in this phase.
During the exploration phase, terramechanics theorycould be applied for soil parameter identification, high-speeddynamics simulation, and control strategy optimization.These applications require terramechanics models that canbe solved quickly. The high-fidelity models could be simpli-fied to improve the calculation speed, with parameter iden-tification to compensate for the simplified errors to maintaina balance between fidelity and simplicity.
The applications of the terramechanics for planetary rov-ers are summarized as follows.
123

22 Intel Serv Robotics (2011) 4:17–38
1. A planetary rover’s wheel–soil interaction mechanics isan important basis for rover design and performance eval-uation. During the R&D phase of a rover, the rover designparameters cannot be determined reasonably withoutusing the terramechanics theory, such as the configura-tion and dimensions of the chassis, the width and radiusof the wheels, and the height, number, and distributionof the lugs. It can also play a role in optimizing the pay-load distribution, analyzing the energy consumption anddesigning the driving unit. Embedding the wheel–soilinteraction mechanics model into the dynamics simula-tion system makes it possible to analyze and evaluate theperformance of a designed rover virtually. The design ofa rover could be optimized and improved to achieve ahigh overall performance on the basis of the simulationresults.
2. The wheel–soil interaction mechanics is the key issue forimproving the fidelity of a virtual simulation, which is ofgreat significance for planetary rovers. The role of virtualsimulation during the R&D phase is mentioned above,for which the fidelity of the terramechanics model is themost important. During the planetary exploration phase,the time delay of information transmission causes contin-uous closed-loop control to become unstable. In order tosolve this problem, a 3D graph predictive display can beadopted for successful tele-operation at situations witha time delay of several seconds, such as for the lunarrover; while for the Mars rover, which has a time delayof tens of minutes, NASA uses a “supervised control”mode. 3D graph predictive display is used to predict anddisplay the motion of a rover by simulation in advance,while “supervised control” is used to generate a series ofcommand sequences and upload these to the rover afterverification by simulation, both of which depend on sim-ulation technology. The simulation speed is very impor-tant for the simulation-based tele-operation of a rover. Itshould at least be in real-time. Therefore, much attentionshould be paid to the solving speed of terramechanicsmodels.
3. The identification of soil mechanical parameters withplanetary rovers is a prerequisite of using terramechanicsmodels, which is also an important scientific goal of plan-etary exploration missions. If the soil parameters aregiven, it is possible to predict the concentrated forcesand moments acting on the wheel by the soil using thewheel–soil interaction mechanics model. Conversely, ifthe forces and moments are measured by onboard sen-sors, it is possible to identify the soil parameters. Bysubstituting the identified parameters into a terrame-chanics model, the control algorithm can be optimizedto coordinate the velocity of the wheels, improve trac-tive performance, and decrease energy consumption. Theparameters can also be sent back to earth to support the
dynamics simulation for 3D graph predictive display orcommand sequence verification.
4. Optimizing the control strategies on the basis of terrame-chanics is important for the locomotion, path following,and path planning of rovers, especially when they tra-verse rough and deformable terrain. A control strat-egy based on kinematic information did work duringpast planetary exploration missions. However, with theincreasing challenges faced by planetary explorationmissions, the performance requirements for planetaryrovers are gradually increasing. Control strategies basedon kinematics only consider topographic informationabout the terrain, while the influence of soil propertieson the control strategy is not considered. If the soil istoo soft, a rover might lose traversability on the plannedpath if the wheel–soil interaction mechanics are not con-sidered. In order to allow a rover to follow a path withless deviation, the wheel skid should be compensated forby controlling the steering wheels. The longitudinal slipof the wheels should also be checked, coordinated, andcompensated for to keep a rover moving with less energyconsumption and arrive at its destination with less error.Only with the help of terramechanics problems such aspath planning, path following, and mobility control canbe well understood and solved effectively.
4 Current research status of planetaryrovers’ terramechanics
4.1 Introduction of classical terramechanics
The invention of the tractor attracted people’s interest in vehi-cles that move on soft soil. In 1913, the German scholar Bern-stain first introduced equations for predicting wheel sinkageand soil pressure [8]. During the past 100 years, terrame-chanics has developed gradually and provided an importanttheoretical basis for the R&D of vehicles.
Five types of methods are usually used in terramechanicsresearch: the empirical method, semiempirical method,model-experiment and dimensional analysis method, theo-retical method, and numerical simulation method [37].
1. Empirical method A typical example is the cone index(CI) method (i.e., WES method) developed by the Water-ways Experiment Station of the U.S. Army Corps ofEngineers during the Second World War. This methodis used to predict a vehicle’s traversability by observingthe motion of similar vehicles on soils with specific CIvalues as measured by conical indenters.
2. Semiempirical method This is a widely used method ofdeveloping wheel–soil interaction models on the basis ofexperimental results and theoretical analysis.
123

Intel Serv Robotics (2011) 4:17–38 23
From 1952 to 1954, Bekker [36], a pioneer in terram-echanics research from the Johns Hopkins University,studied the relationship between soil sinkage and resis-tance force and deduced the well-known pressure-sink-age formula, which is widely used for calculating thenormal stress under a wheel. Reece and Wong [38], whois the current ISTVS president, carried out researches onterramechanics and obtained many interesting results.They investigated the flow and failure phenomena ofsoil and found that there are two types of shearing fail-ure zones under a wheel. Onafeko and Reece [39] mea-sured the stress distributions under both driven wheelsand towed wheels. Wong and Reece [40,41] improvedBekker’s normal stress formula using Onafeko’s experi-mental results. They used the entrance angle, exit angle,and maximum stress angle to describe the normal stressunder a wheel.In order to predict the tractive force, the shearing per-formance of the soil should be analyzed. In 1944,Miclethwait used Coulomb’s formula to calculate thethrust force of a wheel [42]. Bekker derived a more gen-eral equation for calculating shearing stress according tosoil deformation [36], which is very complex and mainlyused for brittle soil. As most soils that vehicles travel onare plastic, Janosi proposed his well-known formula forcalculating the shearing stress as a function of the defor-mation of plastic soils in 1961 [43].
3. Model experiments and dimensional analysis methodDimensional analysis theory is the basis of model exper-iments, which involve experiments carried out in a soilbin with a reduced scale model to analyze the physi-cal phenomena in the prototype. Chen developed a soilbin in 1957 to carry out model experiments and simu-late the traveling mechanism of vehicles on the basis ofthe “similarity theory.” His “distortion model theory” isimportant for analyzing model experiment results underdistorted conditions [44].
4. Theoretical method This method is used to analyze thewheel–soil interaction mechanics with soil mechanicstheory, elasto-plasticity theory, constitutive relation the-ory, etc. According to the Rankine theory, Prandtl theory,and Terzaghi theory, the failure form of the soil undera wheel can be analyzed. In 1909, Haur and Karamandeduced the plane strain and axisymmetric bearing per-formance equation on the basis of the plastic theory, idealrigid plastic material assumption, and Mohr–Coulombrule. Karafiath analyzed the stress distribution under awheel on the basis of the plastic theory [37]. Research-ers from the Soil Mechanics Group at CambridgeUniversity proposed the theory of the critical state of sat-urated soil based on continuum mechanics [45]. In the1990s, Wanjii et al. used a viscoelastic soil model andthe three-element Maxwell model to evaluate the normal
stress distribution under a wheel running on soft soil.They used a rigid wheel–soil interface model to evaluatethe tangential stress distribution under a wheel to predictits performance [46].
5. Numerical simulation method With the development ofcomputer technology, numerical methods such as thefinite element method (FEM), DEM, and boundary ele-ment method are being applied to simulate the wheel–soilinteraction mechanics. Perumpral et al. [47] first used anumerical method to simulate the vehicle–terrain inter-action by analyzing the stress distributions and soil defor-mation under the wheels of a tractor using linear andnonlinear elastic FEM methods.
Actually, researchers usually combine several of thesemethods while studying terramechanics. The achievementsof terramechanics have been explained in detail in manywell-known monographs. Bekker [48] published his firstmonograph, “Theory of land locomotion—the mechanics ofvehicle mobility” in 1956 as a textbook for the University ofMichigan. From 1954 to 1960, he built the Land LocomotionLaboratory (LLL) and researched problems such as the rela-tionship between soil stresses and deformation, which wereincluded in his book “Off-road locomotion: research anddevelopment in terramechanics” [7]. In 1960, Bekker wentto the General Motors Corporation and founded the Vehi-cle Mobility Laboratory to research lunar roving vehiclesfor the Apollo Program, which was the highest achievementof terramechanics at that time. Then he published anotherbook, “Introduction to terrain-vehicle systems” in 1969 [36].Karafiath and Nowatzki published “Soil mechanics for off-road vehicle engineering” to demonstrate soil mechanics andits application to off-road vehicles. This included a discus-sion of off-road travelling mechanics, soil mechanics, plasticmechanics, and computational mechanics [49]. Wong alsopublished some influential monographs such as the “Theoryof ground vehicle” [50] and “Terramechanics and off-roadvehicles” [51].
Terramechanics is also applied to computer simulationsof vehicles to analyze their performance, instead of usingexperiments, and to assist in the design, evaluation, andoptimization of such vehicles. The US Army developedcomprehensive analytical models of vehicles on the basis ofterramechanics to simulate the motion and predict the per-formance of vehicle systems, thereby saving a large amountof experimental expenses [8]. The well-known mechanicaldynamics simulation software, Automatic Dynamic Analysisof Mechanical System (ADAMS), developed by MSC Soft-ware Inc., USA, provides several types of tire models such asMF-Tyre, PAC2002, UA, FTire, SWIFT, and PAC89/PAC94.It can be combined with a road map to simulate thedynamics performance of vehicles on 3D roads [52]. CM-LABS Corporation of Canada developed Vortex, an excellent
123

24 Intel Serv Robotics (2011) 4:17–38
interactive multibody dynamics simulation platform embed-ded in the terramechanics models of Wong to support thedynamics simulation of wheeled and tracked vehicles [53].On the basis of the results of research carried out at the for-mer Institute for Automotive Engineering (IKK) at the Uni-versity of the Federal Armed Forces Hamburg, AutomotiveEngineering Software and Consulting (AESCO) of Germanydeveloped the AESCO Soft Soil Tire Model (AS2TM) to ful-fill the demands of users who deal with the interactions ofelastic tires and soft soils. This model is available as a Mat-lab/Simulink S-Function [54].
4.2 Current research on planetary rovers’ terramechanics
Terramechanics is a subject that combines theories andexperiments closely. In order to investigate the terramechan-ics for planetary wheels with small dimensions and pay-loads, some single-wheel testbeds and rover testbeds withhigh-performance sensors were developed for experimentalresearch. Using the experimental results, researchers ana-lyzed the performance of wheels and rovers, verified thenewly developed technologies, and deduced/improved semi-empirical wheel–soil interaction models.
Dubowsky and Iagnemma from the Field and SpaceRobotics Laboratory (FSRL) of the Massachusetts Instituteof Technology (MIT) first developed a single-wheel testbedfor planetary rovers (as shown in Fig. 4) under a contract withNASA to aid in the development of next-generation estima-tion, motion planning, and control algorithms. The length,breadth, and height of the testbed were 1.06, 0.37, and 0.44 m,respectively. The forces and moments acting on the wheel,the driving torque and angular velocity of the motor, andthe travelling velocity of the carriage could be measured.The slip ratios of the experimental wheel were controlled bymodulating the wheel’s angular velocity and the carriage’straveling velocity. The wheel radius, vertical load, drivingtorque, drawbar pull, and velocity ranges were similar tothose of planetary rovers [55]. Iagnemma et al. simplifiedthe conventional distribution equations that describe the nor-mal stress and tangential stress acting on a wheel to linearfunctions on the basis of the observation that the stress dis-tributions are approximately linear for most natural terrains.A simplified closed-form wheel–soil interaction mechanicsformula was deduced on the basis of this simplification [56].This idea is accepted by some researchers to deduce newversions of simplified closed-form formula. A vision-basedmethod was developed to measure the sinkage of a wheelwith limited computational resources by detecting the dif-ference in intensity between the wheel rim and the soil. Theeffectiveness and robustness of the algorithm were demon-strated by experimental results with the single-wheel testbedunder various terrain and lighting conditions [57]. Bauer et al.from Dalhousie University, Canada, used a testbed to carry
Fig. 4 Single-wheel testbed developed by MIT [55]
out experiments on wheels with different number of lugs.They showed that there is an improvement of approximately30% in the drawbar pull when a wheel with 18 lugs is usedas compared to a wheel with 9 lugs, on the experimental softsand; the influence on sinkage was relatively small [58].
Iagnemma is leading the Robotic Mobility Group in MITas a principal research scientist at present. Because the tra-versability of a rover is highly dependent on the mechanicalproperties of the terrain, a four-wheeled mobile robot (Fig. 5)was developed for research on the terrain sensing problem,funded by NASA/JPL through the Mars Technology Pro-gram. The problem of classifying natural terrain on the basisof visual features such as color and visual texture is beingconsidered, which involves the classification of terrains intoa set of priori known terrain classes [59]. In order to learnvisual classification online, to improve the terrain recognitionability of the rover based on its experience and autonomouslyidentify mechanically distinct terrain classes to establish thelist of terrain classes, Brooks et al. proposed an approach ofdetecting novel terrain based on a two-class support vectormachine (SVM) [60]. They also presented a method to clas-sify terrains based on vibrations measured by an accelerome-ter installed on the rover, which is robust against lighting vari-ations as compared to the vision-based method [61]. Halatciet al. [62] studied the performance of multisensor classifica-tion methods, and combined the visual and tactile classifica-tion methods for Mars surface exploration. The effectivenessof these approaches were verified using experimental resultsfrom the four-wheeled rover testbed and the single-wheeltestbed.
Apostolopoulos from the Robotics Institute of CarnegieMellon University (CMU) designed the configuration param-eters of Nomad, a planetary prototype rover, using classicalterramechanics models. He carried out experiments with the
123

Intel Serv Robotics (2011) 4:17–38 25
Fig. 5 Four-wheeled rover testbed of MIT [59]
Fig. 6 Single-wheel testbed of CMU [22]
single-wheel testbed shown in Fig. 6 to compare actual datawith the theoretical results, extrapolate Nomad’s locomotionperformance, and measure the endurance and behavior of thewheel’s driving unit [22].
Researchers from Chuo University, Meiji University, andJapan Aerospace Exploration Agency (JAXA) analyzed thewheel–soil interaction model on a slope to calculate the stressdistributions and concentrated mechanics. They consideredthe “hardening effect” and “broaching effect” of soil, on thebasis of which a wheel with lugs on the surface of a pentagon-type wheel was developed [63]. They carried out experimentsfor four types of wheels with the testbed shown in Fig. 7, andverified that the traversability of a wheel can be improvedby combining the effects of hardening and shearing with thenewly developed wheel [64].
Yoshida et al. [65] from the Space Robotics Labora-tory (SRL) of Tohoku University have been researching aplanetary rover’s terramechanics for more than 10 years.
Fig. 7 Single-wheel testbed of JAXA [64]
Fig. 8 Single-wheel testbed of Tohoku University [66]
Fig. 9 El Dorado testbed of Tohoku University [129]
A single-wheel testbed and several rover testbeds (such as thefour-wheeled rovers Dune, El Dorado, El Dorado II, and thesix-wheeled rover Nexus 6) were developed for experimentalstudy, as shown in Figs. 8, 9 and 10. The single-wheel testbedis similar to that developed in MIT and the soil bin is filledwith lunar soil simulant [66]. The rovers are equipped withgyroscopes, inclinometers, visual odometry cameras, motor
123

26 Intel Serv Robotics (2011) 4:17–38
Fig. 10 Nexus 6 testbed of Tohoku University [125]
current sensors, encoders, F/T sensors, etc., to measure datasuch as their position and orientation, velocity, slip ratio,motor current, and wheel–soil interaction mechanics [67].The Wong–Reece terramechanics formula was employed toderive an improved model for calculating the drawbar pullas a function of the vertical load and slip ratio with rea-sonable precision using the empirical parameters of the soilestimated by single-wheel experiments [68]. In order to ana-lyze the steering performance of a wheel and a rover, thelateral force characteristics of a driving wheel was modeledas a function of the slip ratio and slip angle. The model sug-gests that the lateral force decreases with an increase in theslip ratio and increases with an increase in the slip angle.The proposed model was validated using experimental resultswith reasonable precision [69]. Yamana developed a wheelwith a built-in force sensor-array (BFSA) to acquire the nor-mal stress distribution online. Experiments were performedwith different slip ratios and velocities on different soils andthe normal stress distribution, including contact angles, weremeasured. By estimating the shearing displacement mod-ulus with experimental results, the wheel–soil interactionmechanics could be predicted better with a terramechanicsmodel [70]. Ikeda [71] did similar research with the wheelsof the El Dorado rover by measuring the slip ratio online andfound that the normal stresses along the width of the wheelwere not equal.
The German Aerospace Center (DLR) also developed asingle-wheel testbed (Fig. 11) and a rover testbed (Fig. 12).The soil bins for both testbeds are filled with appropriate Mar-tian soil simulant. Experiments were carried out with them tovalidate Mars Rover Chassis Evaluation Tools (RCET). Sev-eral distinct modifications were made to the classical terrame-chanical wheel–soil models on the basis of the experimentalresults, relating primarily to the modeling of the slip-sinkagebehavior [23].
Fig. 11 Single-wheel testbed of DLR [23]
Fig. 12 Rover testbed at DLR [23]
The LTMBE Laboratory of Jilin University developed asingle-wheel testbed, as shown in Fig. 13. A three phase asyn-chronous motor and a permanent-magnet direct current servomotor are used for the steering and driving control of a wheel.The slip ratio can be controlled between 0 and 0.8. Chen [72]researched the tractive performance of wheels with grousersusing this testbed. Zou et al. presented a prediction model fora rigid wheel on loose soil based on the conventional theoryof terramechanics. Different wheels were used to measurethe tractive performance for model verification [73]. He alsocompared the performance of a lugged wheel and a smoothwheel by single-wheel experiments. The drawbar pull of theformer wheel was 5.2 times that of the latter one [74].
The State Key Laboratory of Robotics and System(SKLRS) of the Harbin Institute of Technology (HIT)also developed a single-wheel testbed for planetary rovers(Fig. 14). The testbed dimensions are 1,700 mm×850 mm×900 mm. It consists of three motors (driving motor,carriage motor, and steering motor) and related sensors
123

Intel Serv Robotics (2011) 4:17–38 27
Fig. 13 Single-wheel testbed of Jilin University [72]
Fig. 14 Single-wheel testbed of HIT [85]
(linear potentiometer displacement sensor, six-axis F/T sen-sor, torque sensor, current sensors, and optical encoders). Thedriving motor can drive the wheel to move forward and thecarriage motor is used together with a conveyor belt to imi-tate the influence of a vehicle body on the wheel and createvarious slip ratios, while the steering motor is used for steer-ing performance research. The wheel sinkage is measuredby a high precision sliding resistance displacement sensor[75]. Tao et al. analyzed the rigid wheel terramechanics onthe basis of the conventional bearing performance model andshearing model [76], deduced a wheel–soil interaction modelfor wheels with varied diameters [77], and constructed math-ematical models of wheel–soil interaction for a rigid lunarrover’s wheel moving or steering on deformable soil, whichwere verified by single-wheel experiments [78]. Liu et al.conducted experiments to analyze the effect of slip on thetractive performance of rigid wheels in loose soil. By ana-lyzing the tractive efficiency, which had the largest value for a
slip of 13%, it was concluded that the optimal slip ratio rangeis 0.10–0.45 for driving control [79]. The recommended lugparameters are 15◦ of spacing angle, 10 mm of lug height, and1.5 mm of lug thickness [80]. In order to comprehensivelyunderstand how the wheel parameters and running state vari-ables influence the wheel–soil interaction mechanics, Dinget al. carried out experiments using a single-wheel testbed forwheels with different radii, widths, lug heights, lug numbers,and lug inclination angles for different slip ratios. The influ-ence of vertical load, moving velocity, and repetitive passingwas also studied. The driving performance of wheels is ana-lyzed using both absolute performance indices and relativeindices to draw useful conclusions. For example, all the wheelindices are influenced by the slip ratio, and it was dividedinto three phases: rising phase (s = 0–0.2), transitional phase(s = 0.2–0.6), and high-sinkage phase (s > 0.6); the resistancecoefficient is roughly the linear function of the entrance anglewith a range of 0.07–0.31, rather than a constant value [81].Theoretical analysis of the wheels’ lug effect was performedon the basis of the experimental results; the working modes ofwheel lugs were analyzed based on the Rankine passive soilpressure theory; formula for calculating the height and num-ber of lugs to form continuous shearing soil loop and that fordetermining lugs’ inclination angle were derived [82]. Theyalso deduced an improved wheel–soil interaction model thatcan reflect the influence of wheel lugs and slip sinkage, whichwas verified by the experimental data [83], analyzed the fac-tors influencing a wheel’s slip sinkage including soil lateralflow, longitudinal flow, and soil digging by lugs, predictedwheel sinkage with high precision using the improved ter-ramechanics model [84], and carried out experiments usingthe El Dorado II rover of SRL (Fig. 15) to test the terram-echanics while it moved with slip/skid caused by differenthorizontal loads or climbed up/down slopes with differentangles [85].
Numerical simulation methods, such as DEM and FEM,which can reflect the microscopic mechanics information,are also used for planetary rovers’ terramechanics research.Nakashima et al. from Kyoto University developed a numeri-cal tool using DEM, whose accuracy was validated by exper-iment, to simulate the performance of the lugged wheelsdesigned for a lunar microrover, specifically for the inter-actions between the lugged wheels and soil. The DEM anal-ysis indicated that, on a flat horizontal lunar surface, wheelswith 18 10- mm-high lugs would provide less net tractionthan wheels with 36 5- mm-high lugs [86]. Sun from theBeijing University of Aeronautics and Astronautics obtainedthe relationship between the mesomechanics and macro-traction parameters using the methods of projection trans-form and accumulative summation for DEM simulation, theresults of which were validated by conventional terramechan-ics theory. It was shown that the tractive force caused bywheel lugs is approximately 60% of the drawbar pull [87].
123

28 Intel Serv Robotics (2011) 4:17–38
Fig. 15 Experiment with El Dorado II of Tohoku University (its wheelsslip because of horizontal resistance force) [85]
Chen performed a two-dimensional analysis of the contactprocess of rigid lunar wheels and soft soil with ANSYS andconcluded that a wheel with a larger width–diameter ratiohas a smaller driving resistance [72].
Since Bekker’s model does not consider the slip sinkageof wheels, it is not suitable for a planetary rover, the sinkageof which greatly varies with the slip ratio [81]. The mod-els that are improved versions of the Wong–Reece modelcan predict the drawbar pull, resistance moment, and wheelsinkage as functions of the slip ratios with good accuracy,but the universality of them are still poor. It is necessary to atleast identify some soil parameters from experimental data,because the nonlinear phenomena are not reflected very well.For example, the theoretical mechanics are linear functions ofthe wheel width; the error caused by nonlinear phenomenonof wheel width has to be compensated by modifying some soilparameters in order to obtain high precision. Steering modelsthat can calculate the steering resistance moment and over-turning moment should be developed, which can be used forthe design of steering units and simulation. All the existingmodels only consider the steady state of wheel–soil inter-action; yet, the transient states when a wheel accelerates orsteers are also important for further research.
5 Current application status of planetaryrovers’ terramechanics
5.1 Application of terramechanics to the designand performance evaluation of planetary rovers
Based on Bekker’s classical terramechanics theory, Apos-tolopoulos developed a computational framework calledLocomotion Synthesis (LocSyn) for the estimation and
Fig. 16 Rover simulation based on RCET [23]
optimization of configuration parameters and the perfor-mance prediction of a rover. Trafficability, maneuverabil-ity, and terrainability were analyzed. The configurationof Nomad, a prototype planetary exploration robot, wasdesigned and evaluated with it. The role of terramechanics inthe robotic locomotion configuration was explicitly shownby in-depth analytical formulations and a discussion withexamples. The configuration equations derived from classi-cal terramechanics modes are shown as the foundation forthe accurate and detailed characterization of the mechanicsof robotic locomotion [22].
A set of tools called RCET was developed in the ESAactivity framework to support the design, selection, andoptimization of space exploration rovers such as the Exo-Mars rover. These tools include a tractive prediction module(TPM) that deals with the wheel–terrain interaction based onBekker’s classical terramechanics theory. The parameters ofwheel diameter, wheel width, grouser dimensions, wheelload, wheel slip and torque are considered by RCET. Sixlocomotion metrics are proposed to evaluate a rover’s motioncapabilities on a given terrain [88]. The motion of a wheeledrover can be achieved when the wheel–soil interactionmechanics are applied to the wheel. It was used to eval-uate the MER, RCL-E, and the RCL-E* rover chassis.Figure 16 shows the required friction coefficient for the rov-ers on a 260 mm step up. The maximum friction coefficientof RCL-E shows that it has the worst performance, and thatthe critical motion appears when the back wheel climbs thestep [23].
RCET was not yet available during Phase A (the phasebefore Phase B1 that was started in 2007) of the Exo-Mars rover. RCAST, which combines a rigid multibodydynamics engine available in Matlab and Simulink’s Sim-Mechanics Toolbox with the AS2TM wheel–soil interac-tion module, was therefore developed to characterize and
123

Intel Serv Robotics (2011) 4:17–38 29
Fig. 17 Rover simulation based on RCAST [89]
optimize the ExoMars rover mobility to evaluate the locomo-tion subsystem designs, as shown in Fig. 17. Single-wheelexperiments were carried out for verifications, with the mea-sured data comparing favorably with the estimated resultspredicted by the AS2TM wheel–soil interaction model [89].
The Rover Performance Evaluation Tool (RPET) devel-oped by the Surrey Space Center and DLR is a systematictool for rover chassis evaluation that applies Bekker’s the-ory. It consists of two main modules: Rover Mobility Per-formance Evaluation Tool (RMPET) and Mobility Synthesis(MobSyn). The RMPET computes performance parametersfor evaluation on a particular terrain (such as Martian terrain,lunar terrain, or terrestrial soil). The concept and function ofMobility Synthesis (MobSyn) are similar to those of LocSyndeveloped by CMU [24].
Miwa from SRL, Tohoku University, developed a wheel–soil interaction mechanics model to deal with the perfor-mance of wheels on a slope. The climbing ability of a roverwas analyzed and the slope traversing behavior was simu-lated based on it. Experiments using a four-wheeled rovertestbed were conducted to verify the effectiveness of per-formance evaluations by the terramechanics model and thedynamics simulation [90]. Ishigami [91] developed an all-wheel dynamics model, which was used to analyze the steer-ing performance and trajectory of a rover.
The Intelligent Vehicle Group of Jilin University devel-oped a “compound walking wheel” having retractile laminasfor a lunar rover (Fig. 18). Chen analyzed the trafficabilityof this wheel based on terramechanics theory and obtainedthe drawbar pull versus slip ratio curves for the wheel. It wasconcluded that the wheel can improve the trafficability of arover on the loose lunar terrain [92].
Li et al. from the Beijing University of Aeronautics andAstronautics performed a qualitative analysis of the interac-tion between a rigid wheel and soil with given parameters
Fig. 18 Compound walking wheel [92]
and brought forward the concept of designing a low-densitysandwich composite wheel for a planetary rover based onthe results. The wheel is expected to have low density, smallvibration and small resistance force [93].
Zhang of SKLRS [94] analyzed the relationships betweenconfiguration parameters and mobility performance param-eters based on Bekker’s classical terramechanics, theoryand presented the main performance evaluation metrics andindexes of mobility performance, which were used for a per-formance comparison of the LER-1 and ALR (a new lunarrover locomotion system configuration) locomotion systems.Liu et al. [95] analyzed the concept of using terramechanicsto design a planetary rover’s wheel parameters such as thewheel radius, and the width, number, and distribution of lugs.
It is exciting that more and more researchers are designingrovers on the basis of the terramechanics theory, providinggood examples for the design of WMRs. Bekker’s theory wasused as the core theory to design the rovers’ parameters andevaluate their performances. However, it should be noted thatBekker’s compaction resistance model, which is very impor-tant for predicting a wheel’s performance, is not suitable forplanetary rovers, because the error of that model is quite largeif the radius of a wheel is smaller than 500 mm or high slipsinkage exists [36]. Actually, most of the newly developedwheel–soil interaction mechanics models for planetary rov-ers are based on the Wong–Reece model, but these have notyet been accepted by rover designers. Ding did some work ondesigning a rover wheel using the recently developed terram-echanics theory. He presented the principles and methods fordesigning the dimensions and lugs of a wheel, and designedwheels for a lunar rover and analyzed their performance onthe basis of the mission requirements of China’s Chang’Elunar exploration project [85]. With further development ofterramechanics for planetary rovers, it may be possible to usethe novel theory for the design and performance evaluationof planetary rovers and other WMRs.
123

30 Intel Serv Robotics (2011) 4:17–38
Fig. 19 Soil parameter measurement with Sojourner rover [98].a Sojourner rover, b Explored soil
5.2 Parameter identification of planetary soil basedon wheel–soil interaction mechanics
Scientists are interested in the mechanical properties of plan-etary soil for many years, which can both improve our sci-entific knowledge of the geological properties of planetarysoil and provide the engineering knowledge required to per-form planetary surface exploration or future settlement activ-ities. The parameters of planetary soil, such as its cohesion,internal friction angle, cohesive modulus, frictional modu-lus, and sinkage exponent, are also necessary parameters forthe application of terramechanics models to rover design,simulation, and control.
During the lunar exploration missions of the 1970s, theUnited States and the former Soviet Union collected soil sam-ples and researched their properties using special instruments[96]. However, in the current and planned Mars and lunarexploration projects, it is necessary to conduct soil researchremotely since no samples will be returned to earth. Com-pared with sample-return research, the in-situ research of soilmechanical properties is low in cost, and convenient to con-duct at any time and any place with little influence on theoriginal mechanical properties of the soil.
The Viking Lander performed soil experiments by scrap-ing the soil to dig trenches with a surface sampler arm. Thecohesion and internal friction angles of different types of soils(drift, crusty to cloddy) were estimated [97]. Researchersfrom the Sojourner rover team conducted experiments bydriving one of the rover’s wheels, while keeping the otherwheels stationary. The soil appeared to show little or no cohe-sion, and the friction angles were found to be between 32◦and 41◦ (Fig. 19) [98]. Mechanical experiments were alsoperformed during NASA’s Mars Exploration Rover missions[99]. The Spirit and Opportunity rovers were used for theresearch on the soil properties of Meridiani Planum [100] andGusev Crater [101], respectively, wherein the subsurface soilwas excavated with a wheel for in-situ observation, study-ing the rock’s mechanical properties with the Rock Abrasion
Tool, and analyzing the wheel track patterns, depths, andwheel slippage dynamics during traverses.
The experiments were carried out according to basicclassical terramechanics theory. The wheel–soil interactionmechanics models consist not only of the cohesion and inter-nal friction angle of soil, but also many other parameters suchas the cohesive sinkage modulus, frictional sinkage modulus,and sinkage exponent, which can express the pressure bear-ing capability of soil. This makes it possible to characterizeplanetary soil more comprehensively by estimating the soilparameters with the forces and moments acting on a wheel.The complex integrated functions for predicting wheel–soilinteraction mechanics should be simplified to develop onlineapproaches for estimating soil parameters.
Iagnemma used a linear least-squares estimator to estimatethe cohesion and internal friction angle of soil online by set-ting the shearing deformation modulus to a typical value onthe basis of a simplified closed-form formula [25], which isadopted to obtain the terrain information for a planetary roverin order to optimize its control strategies and maximize thecontrol effectiveness [102].
Hutangkabodee et al. [103] of King’s College Londonemployed the Composite Simpson’s Rule to obtain anapproximated simplified form model, which was used todevelop a method of identifying the internal friction angle,shearing deformation modulus, and lumped pressure sinkagecoefficient (combination of cohesive modulus and frictionalmodulus), verifying it by setting the cohesion to a fixed valueof 3 kPa.
In order to develop methods for identifying all theunknown soil parameters, theoretical and numerical analy-ses were done by Ding et al. to understand the influence ofsoil parameters on wheel–soil interaction mechanics. It wasfound that the soil parameters of the bearing property (cohe-sive modulus, frictional modulus, and sinkage exponent) pri-marily influence the wheel sinkage; the resistance moment ofa wheel is mainly influenced by the shearing property (cohe-sion, internal friction angle, and shearing deformation mod-ulus) of soil; the contact angle coefficients have a relativelylarger influence on the drawbar pull [104]. They simplifiedthe improved terramechanics model for planetary rovers [84]by linearizing the normal stress and shearing stress to derivedecoupled closed-form analytical equations. Every decou-pled equation contains one or two groups of soil parameters,making it feasible to identify eight unknown soil parame-ters in a step-by-step process to characterize the soil. Soilparameters were identified with experimental data obtainedby single-wheel experiments and compared with those mea-sured by conventional plate-sinkage experiments and shear-ing experiments to validate the effectiveness of the method[105]. The model was further simplified to reduce the cal-culation time and support real-time application. Due to thecompensation role of the identified parameters, it was proved
123

Intel Serv Robotics (2011) 4:17–38 31
by the experimental data that the decoupled analytical modelcan predict the drawbar pull, resistance moment, wheel sink-age, and slip ratio with high precision, making it reasonableto apply for dynamics simulation and control algorithm opti-mization of a lunar rover [106].
The new approaches for identifying soil property param-eters make it possible to determine the soil characteristicsmore precisely and comprehensively with a planetary rover.But, there is still a long way to go before these methods canbe implemented during planetary exploration missions. Thekey technologies include measuring or estimating the nec-essary data (such as the sinkage, forces, moments, and slipratio of a wheel) with limited onboard equipment.
5.3 Dynamics simulation based on terramechanicsfor planetary rovers
As seen from Figs. 2 and 3, dynamics simulation can playan important role during both the R&D phase and the explo-ration phase of a planetary rover, and wheel–soil interactionmechanics is an important factor in determining the fidelityof a dynamics simulation. The architecture of a comprehen-sive high-fidelity/high-speed virtual simulation system wasobtained, and wheel–soil interaction mechanics was consid-ered as the key resource for the designing [107].
A dynamics simulation module based on Bekker’s clas-sical terramechanics theory is the core of rover design,performance analysis, and evaluation tools LocSyn, RCET,RCAST, and RPET that are mentioned above.
The Jet Propulsion Laboratory (JPL), USA, developed theRover Analysis, Modeling, and Simulation (ROAMS) sys-tem for the real-time simulation of planetary rovers [108,109]. Reference [28] describes wheel–terrain contact mod-eling in the ROAMS physics-based simulator. The wheel–terrain interaction is of primary interest during a rover’smotion over a rough terrain. ROAMS uses a single degree-of-freedom, a Hunt–Crossley compliance system at each wheelto compute the force in the normal direction, and a twodegree-of-freedom compliance system to compute tangen-tial forces on the basis of a linear spring-damper model.
Lamon from the Autonomous Systems Lab (ASL) ofEPFL used the Hertz-Föppl elastic model to calculate theresistance acting on a wheel, and built a physical model fora six-wheeled rover with a passive suspension mechanism.A dynamics simulation was performed with the OpenDynamics Engine (ODE) to verify the effectiveness of theoptimal torque control method (Fig. 20) [110].
General dynamics analysis software such as ADAMS hasalso been adopted to simulate the motion of rovers. ADAMSprovides a tire module and contact force model, which canbe used to calculate the wheel and soil interaction mechan-ics for vehicles. Lindemann et al. of JPL used ADAMS toverify the design of the MER rover. The initial ADAMS
Fig. 20 Dynamics simulation of planetary rover using ODE [110]
structural simulations correlated closely to the results of adrop experiment, with discrepancies between 4 and 20%.It was verified that the dynamic simulation results can beused to determine the peak loads, deflections, and energy fora rover, and the utility of the dynamic simulations of roversto accurately predict the results of mobility events before theactual hardware exists in a project was also proven [111].Tong from Jilin University designed a lunar rover simulationplatform based on a secondary development of ADAMS.This platform could perform simulation analyses under avariety of operating conditions such as differential speedrotation, anti-roll capacity, climbing up slopes, and obsta-cle overcoming capacity [112]. Tao et al. used the contactforce model in ADAMS to evaluate the motion performanceof a rover with six cylindrical-conical wheels developed fortraversing rough terrains. The motion in an active climb-ing mode, passive adaptation mode, and climbing–walkingmode, as well as the slope climbing ability and steeringability, were analyzed by dynamics simulation [113]. Wanganalyzed the tire module and compared the applicability oftire models such as MF-Tyre, UA, FTire, SWIFT, and PAC.PAC2002, which is compatible with a 3D road, was finallyselected. By modulating the coefficients of the model accord-ing to the experimental results obtained from a wheel–soilinteraction testbed, the model attains considerable fidelity(Fig. 21) [114].
The above simulation systems used Bekker’s terrame-chanics model, a general contact model, a tire model forterrestrial vehicles, or a simple spring-damper model andelastic model, the fidelity of which in predicting wheel–soilinteraction mechanics are not high enough for planetary rov-ers. Some of the simulation results can be acceptable bymodulating the related parameters according to experimen-tal data, while other important state variables such as the
123

32 Intel Serv Robotics (2011) 4:17–38
Fig. 21 Dynamics simulation of rover using ADAMS [114]
longitudinal slip, side slip, and slip sinkage of a wheel can-not be reflected very well without using the newly developedmodels.
On the basis of the results of their research on the terram-echanics for planetary rovers, researchers at SRL built anall-wheel dynamics model and analyzed the motion dynam-ics for rovers, including the slope traversing and steeringdynamics. ODE software and Spacedyn, a MATLAB Tool-box for the kinematic and dynamic analyses and simula-tion of articulated multibody systems with a moving basedeveloped by SRL, were used to realize the simulation.The fidelity of the simulation was verified and validatedby experiments with a single-wheel testbed and rover test-beds. The virtual simulation platform was then used formotion analysis and control strategy verification. Dynam-ics simulations can be found in most of the papers written bySRL, some examples of which are [29,32,34,35,68,91], and[115]. The fidelity of the dynamics simulation platform wasgreatly improved by embedding high-fidelity terramechan-ics models and dealing with the contact between roughorma-ble terrains and different wheels rather than the entire rover.A rough terrain modeling method was developed for esti-mating the wheel–soil interaction area, wheel sinkage, andterminal coordinates. Experimental results for the El DoradoII rover moving on Toyoura soft sand were used to verify thefidelity of the simulation [116]. Figure 22 shows the simula-tion results.
Although the fidelity of a simulation can be improved byusing the novel terramechanics models for planetary rovers,the simulation speed should be improved further by simplify-ing the models to realize high-speed simulation and supportreal-time application. The transient process of wheel–soilinteraction should also be considered to enhance the fidelityfurther.
t = 5s
t = 11st = 17s
t = 23st = 28.5s
t = 0s
1 2 3 4 5
-0.4
-0.2
0
0.2
0.4
0.6
Slip
ratio
x0 (m)
s1s2s3s4-10
0
10
20
Dra
wba
rpu
ll( N
)
FDP1FDP2
FDP3FDP4
1 2 3 4 5x0 (m)
0 10 20 30-10
-5
0
5
10
15
t (s)
Ang
le(°
)
0q0q1q2
Fig. 22 Simulation results for El Dorado II rover [85]
5.4 Terramechanics-based mobility controland motion planning for planetary rovers
Future planetary exploration missions will require rovers toautonomously perform more difficult tasks in rough terrainswith limited human supervision, while most motion plan-ning and control algorithms do not consider the physicalcharacteristics of the rovers and the planetary environment,thus restricting the effectiveness of a rover in rough terrains.Iagnemma noticed this problem and introduced a “physics-based” approach that considers the terrain information andwheel–soil interaction mechanics for mobility control andmotion planning. This control concept is in contrast to theconventional approach, which uses limited or no physicalsystem information [33]. He developed a rough-terrain con-trol (RTC) methodology by exploiting the actuator redun-dancy of multi-wheeled mobile robot systems to improveground traction and reduce power consumption. An optimi-zation criterion is deduced on the basis of terramechanicsconcepts. An extended Kalman filter was used to estimatethe wheel–ground contact angle, which is a key element forthe control algorithm with the onboard sensors. The simu-lation and experimental results of a wheeled rover travers-ing a Mars-like terrain demonstrated the effectiveness ofthe algorithms [117–119]. A four-wheeled rover with anactively articulated suspension, which can improve rough-terrain mobility by repositioning its center of mass, wascontrolled with this approach [120]. In order to predict themobility of a rover more accurately, a method was devel-oped for efficient mobility prediction based on the stochas-tic response surface method (SRSM), which considers soilparameter uncertainty [121]. A statistical method for efficientmobility prediction was proposed. It considers the uncer-tainty of the terrain’s physical parameters (cohesion andinternal friction angle) with SRSM to simulate the motion of
123

Intel Serv Robotics (2011) 4:17–38 33
a rover, by employing both vehicle dynamics and wheel–ter-rain interaction mechanics. Comparisons of the experimentaland simulation results for a rover traveling over a sloped ter-rain show that the predicted motion path with confidenceellipses can be used as a probabilistic reachability metric ofthe rover position. [122,123].
On the basis of the analysis of the quasi-static model,including the wheel–soil interaction mechanics, Lamon pre-sented a method for wheel-ground contact angle measure-ment and selecting the optimal torques of a six-wheeled roverthat considers the system constraints, in order to limit thewheel slip and improve the climbing capabilities [124]. Theslip optimization algorithm was tested and compared witha standard speed control algorithm in a simulation with theSOLERO Rover. The simulations clearly showed the advan-tages of torque control versus speed control [110].
Yoshida et al. investigated the kinetic behavior of a plane-tary rover considering both the wheel–soil traction mechanicsand articulated body dynamics, when it travels on a naturalrough terrain. Experiments were carried out with the Nexus6 rover testbed to observe the physical phenomena of the soiland model the traction mechanics using the wheel’s slip ratioas a state variable. The relationship of the load-traction factorversus the slip ratio was modeled theoretically, and then veri-fied by experiments [125]. An effective control algorithm forincreasing the traversability of a rover was proposed, whichtries to keep the slip ratios of the wheels within a small valueand limits excessive wheel force, so that the rover can suc-cessfully traverse over an obstacle without digging into thesoil or getting stuck. Experiments showed that on loose soil,the velocity control of a wheel results in a fatal situationin which the wheel spins and then penetrates into the soil,while the slip-based control is effective at preventing a wheelfrom such a situation [126]. Ishigami et al. analyzed slopetraversability, considering both slope climbing and crossingcapabilities for a planetary exploration rover based on a ter-ramechanics approach. The two criteria dominating the slopetraversability, the “mobility limit” and “trafficability limit,”were investigated, which made it possible to determine theappropriate motors for slope negotiation and find a better con-trol algorithm [127]. An all-wheel dynamics model, whichdeals with both the rover’s dynamics and the terramechan-ics of each wheel, was developed for analyzing the steeringtrajectory of a rover. The proposed dynamics model shows agood approximation that corresponds with the experimentaltrajectory, both on a horizontal and an inclined surface [128].The wheel-and-vehicle dynamics simulation platform wasthen used for verification of the steering maneuver, path fol-lowing, and path planning algorithms [129]. Steering maneu-vers were investigated under different steering angles by bothdynamics simulation and experiments using a four-wheeledrover testbed on lunar soil regolith simulant [32]. Because ofwheel slip and skid, following an arbitrary path on loose soil
is a difficult task. A path following algorithm that includesboth steering and driving maneuvers for the rover was devel-oped not only to follow a path but also to simultaneouslycompensate for the longitudinal slip and lateral slip [34].A sensor-based feedback control was developed using thekey approach of compensating for the vehicle sideslip andlongitudinal/lateral slips of a wheel. The performance of thecontrol method was confirmed in slope traversal experimentsusing a four-wheeled rover testbed [130]. A path planningmethod and its evaluation method were developed, takinginto account the wheel slip dynamics of a planetary explo-ration rover. Several paths for a rover moving on a roughterrain were generated with the terrain-based criteria func-tion. Then, a dynamics simulation was carried out by con-trolling the rover to follow the candidate paths. Finally, thepaths were evaluated on the basis of the simulation results(Fig. 23) [35]. The slippage of the wheels should be compen-sated for to decrease the influence on localization and pathfollowing and to avoid the danger of vehicle entrapment. It isdifficult to predict the wheel slip for a real exploration rover,especially when driving in rough terrain environments. Reinaet al. [131] presented a novel method for lateral slip estima-tion based on the visual observation of the trace produced bythe wheels of the robot while traversing a rough and deforma-ble terrain. Ding et al. considered the problem of defining thelongitudinal slip ratio for lugged planetary wheels. Two slipratio estimation methods were then proposed and verified:one is based on visual information and analyzes the marksmade on the terrain by the lugs of a wheel with high precision,while the other is based on terramechanics and solves the ver-tical load and torque equations for a wheel, which can then beused to estimate the slip ratios of all the wheels [132]. In orderto save energy and time for a rover moving on a rough anddeformable planetary terrain, a robust control approach wasdeveloped that tries to keep the slip ratios of all the wheelsequal and the velocity of the body constant by compensatingfor the slip, without calculating the slip ratio values. It wasverified by controlling a virtual four-wheeled rover on thebasis of a dynamics simulation [133]. The development ofalgorithms for the “slip compensation and traction control”of planetary rovers is one of the most important achievementsin space robotics [134].
Wang from HIT analyzed the dynamics modeling methodfor a lunar rover on the basis of the classical terramechan-ics theory. He designed a slide mode VSS controller basedon the dynamics model to coordinate the speeds of differentwheels [135].
Physics-based control that considers the wheel–soilinteraction mechanics is very important for improving themobility of a robot, especially when it traverses a roughorma-ble terrain. Characterized by nonlinearity, strong coupling,and nonholonomic, WMRs are ideal research platforms forresearchers from the fields of robotics and automatic control.
123

34 Intel Serv Robotics (2011) 4:17–38
Fig. 23 Simulation of path planning and evaluation [35]
The physics-based control of planetary rovers will bring for-ward more and more new interesting problems for research.Advanced linear and nonlinear control theories such asRobust Control, Optimal Control, VSS Control, Fuzzy Con-trol, and Neural Net Control that can deal with the uncer-tainties of models and the optimization of energy and timeshould be adopted for the physics-based control of WMRs.
6 Conclusions
With the increasing challenges facing planetary explora-tion missions and the resultant increase in the performancerequirements for planetary rovers, wheel–soil interactionmechanics is playing an important role in the developmentof these rovers.
In the beginning, the terramechanics theory for conven-tional terrestrial vehicles was usually applied directly or aftersimple improvements on the basis of experimental results.And then, the terramechanics for WMRs (in particular, plan-etary exploration rovers) and its further application have beenresearched intensively by the researchers, because of therequirements from the Mars rovers and lunar rovers. Despiteof the existent results, there are still many open issues to besolved for elucidating the wheel–soil interaction mechanismand further improving the fidelity of prediction models, inorder to meet the higher demands of planetary rover applica-tions. The existent results also need further verification andimprovement from the other researchers to make them moregeneral.
1. Experimental test system development and planetaryenvironment construction. It is necessary to developrover test systems equipped with all the necessary sensorsaccording to the planetary exploration missions forground experiments, which can acquire informationabout the kinematics, dynamics, and terramechanics ofa rover, and to develop terrain construction mechanismsand experimental fields with planetary soil simulant tosimulate the typical terrain geometry and gravity. On the
basis of these rover experimental test systems and exper-imental fields, the terramechanics of planetary rovers onrough and deformable terrains can then be researchedcomprehensively. During the rover exploration phase, if arover faces an emergency situation such as getting stuck,solutions could be provided on the basis of the resultsfrom ground experimental systems.
2. Principle, prediction, and avoidance method of wheelslip and sinkage. During the wheel–soil interaction pro-cess, more wheel sinkage will be caused by an increase inthe slip ratio, for which the lateral flow of sand, longitu-dinal flow of sand, and the soil digging by wheel lugs areall important factors. By analyzing the trajectory of sandparticles, sand flow property, and slip-sinkage principle,the influence of factors such as the normal force, dimen-sions, slip ratio, and running velocity on the wheel sink-age could be analyzed, and provide a theoretical basis forsolving related problems such as how to design the wheeland rover chassis to decrease the wheel sinkage, how tocontrol the rover to prevent a large slip sinkage, and howto remotely drive a rover over dangerous terrains.
3. Mechanical problems of wheel moving on deformablesoil. The following issues should be considered: com-bining the theoretical analysis, numerical simulation, andexperimental results to build a constitutive model of plan-etary soil; measuring and analyzing the stress distribu-tions under rover wheels; researching the effect of wheellugs, load, dimensions, velocity, multipass, and hyster-esis; analyzing and evaluating the wheel performance;deriving high fidelity wheel–soil interaction mechanicsmodels for slip, skid, and steering situations.
4. Wheel–soil interaction mechanics for wheels on roughterrains. The current research on the terramechanics forplanetary rovers mainly focuses on the motion on flat ter-rains and climbing/traversing slopes. Furthermore, theslope climbing models are usually simplified to a flat-terrain model, which cannot reflect the actual situationvery well. Understanding the terramechanics of a plan-etary rover in very rough terrains and developing high-fidelity mathematical models is beneficial for dynamicssimulation, slip ratio estimation, and control algorithmoptimization for following a path, saving energy, andenhancing the traversability of a rover.
5. Terramechanics theory and application methods for thedesign, soil parameter identification, simulation, andcontrol of planetary rovers. Different applications havedifferent requirements for planetary rovers’ terrame-chanics: for rover design and performance evaluation, themajor concern is the critical situation of a rover includingits maximum slope climbing ability, maximum obsta-cle height that can be overcome, etc.; the control pro-cess requires high-fidelity terramechanics models for theprediction of the mechanics under different slip ratios,
123

Intel Serv Robotics (2011) 4:17–38 35
vertical loads, and terrains; the dynamics simulationrequires models that consider the dynamics process ofwheel–soil interaction including the vibration, damping,and hysteresis characteristics, while parameter identifi-cation needs decoupled analytical interaction models. Atthe same time, real-time applications require simplifiedmodels that can be solved quickly. The performance of aplanetary rover will be greatly enhanced by solving theproblems with the development of wheel–soil interactionmechanics, and some new theories may be developed,such as the force/position hybrid control of WMRs.
Acknowledgments This work was supported in part by the NationalNatural Science Foundation of China (grant number 50975059/61005080), the Chinese State Key Laboratory of Robotics and SystemFoundation (grant number SKLRS200801A02), the Key LaboratoryOpening Funding of HIT (grant number HIT.KLOF.2009060/2009061),and the “111 Project” of the Chinese Ministry of Education (grant num-ber B07018).
References
1. Home Page of NASA/JPL Mars Pathfinder. http://marsprogram.jpl.nasa.gov/MPF/
2. Squyres SW, Knoll AH, Arvidson RE et al (2009) Explora-tion of Victoria crater by the Mars rover Opportunity. Science324(5930):1058–1061
3. Home Page of NASA/JPL Mars Exploration Rover Mission.http://marsrovers.jpl.nasa.gov/home/index.html
4. Volpe R (2005) Rover technology development and missioninfusion beyond MER. In: Proceedings of IEEE Aerospace Con-ference, pp 971–981
5. Winnendael M, Baglioni P, Elfving A, Ravera F, Clemmet J (2008)The ExoMars rover-overview of phase B1 results. In: Proceedingsof the 9th iSAIRAS, Los Angeles, CA, USA
6. Neal CR (2009) The Moon 35 years after Apollo: what’s left tolearn?. Chem Erde Geochem 69(1):3–43
7. Bekker MG (1960) Off-road locomotion: research and devel-opment in terramechanics. The University of Michigan Press,Ann Arbor
8. Zhang KJ (2002) Vehicle terramechanics. National DefenseIndustry Press, Beijing (in Chinese)
9. Nakashima H (2004) Discrete element method (DEM) and its pos-sible application. In: Proceedings of SICE Annual Conference inSapporo, Sapporo, Japan, pp 1104–1107
10. Ren LQ, JIA Y, LI JQ et al (2005) Conceptual design ofsimulation experiment for lunar rover’s mobility performance.In: Proceedings of the 2nd Academic Conference of Deep SpaceExploration Section of Chinese Society of Astronautics, Beijing,China, pp 458–466 (in Chinese)
11. Sun G, Gao F, Li W (2007) Terramechanics and its application inplanetary exploration. Adv Mech 37(3):453–464 (in Chinese)
12. Sun G, Gao F, Li W (2005) Research contents and methods forterramechanics of deep space exploration vehicle. In: Proceed-ings of the 2nd Academic Conference of Deep Space Explora-tion Section of Chinese Society of Astronautics, Beijing, China,pp 445–451 (in Chinese)
13. Craig J J (2004) Introduction to Robotics: mechanics and control,3rd edn. Prentice Hall, Englewood Cliffs
14. Xu YS, Kanade T (1993) Space robotics: dynamics and control.Kluwer Academic Publishers, Boston
15. Siegwart R, Nourbakhsh IR (2004) Introduction to autonomousmobile robots. MIT Press, Cambridge
16. Tarokh M, Mcdermott G J (2005) Kinematics modeling andanalyses of articulated rovers. IEEE Trans Robot 21(4):539–553
17. Howard T, Kelly A (2007) Optimal rough terrain trajectorygeneration for wheeled mobile robots. Int J Robot Res 26(2):141–166
18. Wright J, Hartman F, Cooper B et al (2006) Driving on mars withRSVP: building safe and effective command sequences. IEEERobot Autom Mag 2006(6):37–45
19. Young K (2006) Mars rover escapes from the “Bay of Lamenta-tion”. http://space.newscientist.com/article/dn9286-mars-rover-escapes-from-the-bay-of-lamentation.html
20. Webster G, Brown D (2010) Now a stationary researchplatform, NASA’s Mars rover Spirit starts a new chapterin red planet scientific studies. http://marsrovers.jpl.nasa.gov/newsroom/pressreleases/20100126a.html
21. Chu CC, Hayati SA, Udomkesmalee S (2005) Mars base technol-ogy program overview. In: Proceedings of AIAA Space Confer-ence and Exposition, Long Beach, CA, USA
22. Apostolopoulos DS (2001) Analytical configuration of wheeledrobotics locomotion. The Robotics Institute of Carnegie MellonUniversity Technical Report CMU-RI-TR-01-08
23. Michaud S, Richter L, Thuer T et al (2006) Rover chassis evalua-tion and design optimization using the RCET. In: Proceedings ofthe 9th ESA Workshop on ASTRA, Noordwijk, The Netherlands
24. Patel N, Ellery A, Allouis E et al (2004) Rover mobility perfor-mance evaluation tool (RMPET): a systematic tool for rover chas-sis evaluation via application of Bekker theory. In: Proceedings ofthe 8th ESA Workshop on ASTRA, Noordwijk, The Netherlands
25. Iagnemma K, Kang S, Shibly H et al (2004) Online terrain param-eter estimation for wheeled mobile robots with application toplanetary rovers. IEEE Trans Robot 20(5):921–927
26. Hutangkabodee S, Zweiri YH, Seneviratne LD et al (2006)Performance prediction of a wheeled vehicle on unknown ter-rain using identified soil parameters. In: Procedings of IEEEInternational Conference on Robotics and Automation, Orlando,FL, USA, pp 3356–3361
27. Krenn R, Gibbesch A, Hirzinger G (2008) Contact dynamics sim-ulation of rover locomotion. In: Proceedings of the 9th i-SAIRAS,Los Angeles, CA, USA
28. Sohl G, Jain A (2005) Wheel–terrain contact modeling in theROAMS planetary rover simulation. In: Proceedings of ASMEInt. Design Engineering Technical Conf. and Computers andInformation in Engineering Conf., Long Beach, CA, USA
29. Yoshida K, Asai H, Hamano H (2001) Motion dynamics of explo-ration rovers on natural terrain: experiments and simulation. In:Proceedings of the 3rd International Conference on Field and Ser-vice Robotics, Helsinki, Finland, pp 281–286
30. Krenn R, Hirzinger G (2008) Simulation of rover locomotionon sandy terrain-modeling, verification and validation. In: Pro-ceedings of the 10th Workshop on ASTRA, Noordwijk, TheNetherlands
31. Lhomme-Desages D, Grand Ch, Maurette M (2008) Modelingof wheel–soil contact for the EDRES mobile robot simulator.In: Proceedings of the 10th Workshop on ASTRA, Noordwijk,The Netherlands
32. Ishigami G, Miwa A, Nagatani K et al (2007) Terramechanics-based model for steering maneuver of planetary exploration roverson loose soil. J Field Robot 24(3):233–250
33. Iagnemma K, Shibly H, Rzepniewski A et al (2001) Planningand control algorithms for enhanced rough-terrain rover mobility.In: Proceedings of the 6th i-SAIRAS, Montreal, Canada
34. Ishigami G, Nagatani K, Yoshida K (2006) Path following con-trol with slip compensation on loose soil for exploration rover.
123

36 Intel Serv Robotics (2011) 4:17–38
In: Proceedings of the 2006 IEEE/RSJ International Confer-nce on Intelligent Robots and Systems (IROS), Beijing, China,pp 5552–5557
35. Ishigami G, Nagatani K, Yoshida K (2007) Path planning forplanetary exploration rovers and its evaluation based on wheelslip dynamics. In: Proceedings of the IEEE International Con-ference on Robotics and Automation (ICRA), Roma, Italy,pp 2361–2366
36. Bekker MG (1969) Introduction to terrain-vehicle. The Univer-sity of Michigan Press, Ann Arbor
37. Zhuang J (2002) Computational vehicle terramechanics. Press ofMechanical Industry, Beijing (in Chinese)
38. Reece AR, Wong JY (1966) Soil failure beneath rigid wheels.In: Proceedings of the 2nd International Conference of ISTVS,Quebec, Canada, pp 425–445
39. Onafeko O, Recce AR (1967) Soil stresses and deformationsbeneath rigid wheels. J Terramechanics 4(1):59–80
40. Wong JY, Reece AR (1967) Prediction of rigid wheel perfor-mance based on analysis of soil-stresses, part I: performance ofdriven rigid wheels. J Terramechanics 4(1):81–98
41. Wong JY, Reece AR (1967) Prediction of rigid wheelperformance based on analysis of soil-wheel stresses, partII: performance of towed rigid wheels. J Terramechanics4(2):7–25
42. Miclethwait EWE (1944) Soil mechanics in relation to fightingvehicles. Military College of Science, Chetsey
43. Janosi Z, Hanamoto B (1961) Analytical determination of draw-bar pull as a function of slip for tracked vehicle in deformablesoils. In: Proceedings of the 1st International Conference of IST-VES, Torino, Italy, pp 707–726
44. Chen BC (1981) Soil-vehicle system mechanics. China Agricul-tural Machine Press, Beijing (in Chinese)
45. Scholfield A, Wroth P (1968) Critical state soil mechanics.McGraw-Hill, London
46. Wanjii S, Hiroma T (1998) Prediction of wheel performance byanalysis of normal and tangential stress distributions under thewheel soil interface. J Terramechanics 34(3):165–186
47. Perumpral JV, Lilzedahl JB, Perloff WH (1971) A numericalmethod for predicting the stress distribution and soil deformationunder a tractor wheel. J Terramechanics 8(1):9–22
48. Bekker MG (1956) Theory of land locomotion—the mechanicsof vehicle mobility. The University of Michigan Press, Ann Arbor
49. Karafiath LL, Nowatzki EA (1978) Soil mechanics for off-roadvehicle engineering. Trans Tech Publications, Clausthal
50. Wong JY (2008) Theory of ground vehicle, 4th edn. Wiley, NewYork
51. Wong JY (1989) Terramechanics and off-road vehicles. Elsevier,Amsterdam
52. MSC. Software Inc. (2007) ADAMS/tire user’s guide53. CMLabs Simulations Inc. (2005) VxVehicle developer guide 354. AESCO (2003) Matlab/Simulink module AESCO soft soil tyre
model (AS2TM) user’s guide55. Iagnemma K (2005) A Laboratory single wheel test-bed for study-
ing planetary rover wheel–terrain interaction. Technical Report ofMIT Field and Space Robotics Laboratory 01-05-05
56. Shibly H, Iagnemma K, Dubowsky S (2005) An equivalent soilmechanics formulation for rigid wheels in deformable terrain,with application to planetary exploration rovers. J Terramechan-ics 2005(42):1–13
57. Brooks CA, Iagnemma K, Dubowsky S (2006) Visual wheel sink-age measurement for planetary rover mobility characterization.Auton Robot 2006(21):55–64
58. Bauer R, Leung W, Barfoot T (2005) Experimental and sim-ulation results of wheel–soil interaction for planetary rovers.In: Proceedings of 2005 IROS, Edmonton, Canada, pp 586–591
59. Terrain sensing project page. http://web.mit.edu/mobility/research/terrain_sensing.html
60. Brooks C, Iagnemma K (2009) Visual detection of novelterrain via two-class classification. In: Proceedings of the 24thAnnual ACM Symposium on Applied Computing Honolulu,Hawaii
61. Brooks C, Iagnemma K, Dubowsky S (2005) Vibration-basedterrain analysis for mobile robots. In: Proceedings of the 2005IEEE International Conference on Robotics and Automation,Barcelona, Spain, pp 3426–3431
62. Halatci I, Brooks C, Iagnemma K (2008) Visual and tactile ter-rain classification and classifier fusion for planetary explorationrovers. Robotica 26(6):767–779
63. Iizuka K, Sato K, Kuroda Y, Kubota T (2006) Experimental studyof wheeled forms for lunar rover on slope terrain. In: Proceedingsof the 9th IEEE International Workshop on Advanced MotionControl, Istanbul, Turkey, pp 266–271
64. Iizuka K, Sato Y, Kuroda Y et al (2006) Study on wheel of explora-tion robot on sandy terrain. In: Proceedings of the 2006 IEEE/RSJInternational Conference on Intelligent Robots and Systems,Beijing, China, pp 4272–4277
65. Home page of lunar/planetary exploration rover of Tohoku Univ.http://www.astro.mech.tohoku.ac.jp/~ishigami/rover/
66. Yoshida K, Shiwa T (1996) Development of a research testbedfor exploration rover at Tohoku University. J Space Tech Sci12(1):9–16
67. Ishigami G (2005) Locomotion mechanics for planetary explo-ration rovers based on steering characteristics. Master thesis ofTohoku University, Sendai, Japan (in Japanese)
68. Yoshida K, Watanabe T, Mizuno N et al (2003) Terramechan-ics-based analysis and traction control of a lunar/planetary rover.In: Proceedings of the 4th International Conference on Field andService Robotics, Lake Yamanaka, Japan, pp 225–234
69. Yoshida K, Ishigami G (2004) Steering characteristics of a rigidwheel for exploration on loose soil. In: Proceedings of the 2004IEEE International Conference on Intelligent Robots and Sys-tems, Sendai, Japan, pp 3995–4000
70. Yamana K (2005) Estimation of soil parameter using normal stressmeasuring wheel. Master thesis, Tohoku University, Sendai, Japan(in Japanese)
71. Ikeda A (2009) A proposal of new traction force model forwheeled mobile robots on loose soil based on measurement ofnormal stress and slip. Master thesis, Tohoku University, Sendai,Japan (in Japanese)
72. Chen B (2007) Research on traction characteristics of the rigidwheel with grousers on sandy soil. Master thesis, Jilin University,Changchun, China (in Chinese)
73. Zou M, LI JQ, LI YW et al (2007) Prediction model andexperimental study on the interaction of rigid wheel and lunarsoil. Trans CSAE 23(12):119–123 (in Chinese)
74. Zou M, Zhang JH, Ren LQ et al (2009) Study on the tractionperformance for the driving wheel of lunar rover. J Astron 30(1):98–103 (in Chinese)
75. Quan QQ (2007) Development and experiment of test-bed ofwheel–soil interaction for lunar rover. Master thesis, Harbin Insti-tute of Technology, Harbin, China (in Chinese)
76. Tao JG, Wang L, Wu FJ, Deng ZQ (2006) Mechanical analy-sis of wheel–soil interaction of lunar rove. J Mach Des Manuf2006(12):56–57 (in Chinese)
77. Tao JG, Quan QQ, Deng ZQ et al (2007) Analysis of wheel–soilinteraction of rolling wheels with different diameter on a lunarrover. J Harbin Eng Univ 28(10):1144–1149 (in Chinese)
78. Tao JG, Hu M, Gao HB (2008) Modeling and measurement ofrigid wheel–soil interaction for a lunar rover. Chin J Space Sci28(4):340–344 (in Chinese)
123

Intel Serv Robotics (2011) 4:17–38 37
79. Liu JC, Gao HB, Deng ZQ et al (2008) Effect of slip on tractiveperformance of small rigid wheel on loose sand. Lecture Notes inComputer Science 5314(1):1109–1116
80. Liu JC, Gao HB, Deng ZQ (2008) Effect of straight grousersparameters on motion performance of small rigid wheel on loosesand. Inf Tech J 7(8):1125–1132
81. Ding L, Gao HB, Deng ZQ, Nagatani K, Yoshida K (2010) Exper-imental study and analysis on driving wheels’ mechanical perfor-mance for planetary exploration rovers moving in deformable soil.J Terramechanics, in press. doi:10.1016/j.jterra.2010.08.001
82. Ding L, Gao HB, Deng ZQ, Liu RQ, Gao P (2009) Theoreticalanalysis and experimental research on wheel lug effect of lunarrover. J Astron 30(4):48–56 (in Chinese)
83. Ding L, Gao HB, Deng ZQ, Liu JC, Tao JG (2009) Terramechan-ics model for wheel–terrain interaction of lunar rover based onstresses distribution. Chin J Mech Eng 45(7):49–55 (in Chinese)
84. Ding L, Gao HB, Deng ZQ, Tao JG (2010) Wheel slip-sinkageand its prediction model of lunar rover. J Central South UnivTechnol 17(1):129–135
85. Ding L (2009) wheel–soil interaction terramechanics forlunar/planetary exploration rovers: modeling and applica-tion. Doctoral thesis, Harbin Institute of Technology, Harbin,China (in Chinese)
86. Nakashima H, Fujii H, Oida A et al (2007) Parametric analysisof lugged wheel performance for a lunar microrover by means ofDEM. J Terramechanics 2007(44):153–162
87. Sun P, Gao F, JIA Y et al (2008) Discrete element simulation ofinteraction between rover wheel and lunar regolith. J Mach DesManuf 2008(10):75–77 (in Chinese)
88. Michaud S, Richter L, Patel N et al (2004) RCET: rover chassisevaluation tools. In: Proceedings of the 8th ESA Workshop onASTRA, Noordwijk, The Netherlands
89. Bauer R, Leung W, Barfoot T (2005) Development of a dynamicsimulation tool for the Exomars rover. In: Proceedings of the 8thi-SAIRAS, Munich, Germany
90. Miwa A (2005) Terarmechanics-based analysis on locomotionmechanics of lunar/planetary exploration rovers. Master thesis,Tohoku University, Sendai, Japan (in Japanese)
91. Ishigami G, Miwa A, Yoshida K (2005) Steering trajectory anal-ysis of planetary exploration rovers based on all-wheel dynamicsmodel. In: Proceedings of the 8th i-SAIRAS, Munich, Germany
92. Chen ZY (2007) Research of compound walking wheel havingretractile laminas with application to lunar rover. Master thesis,Jilin University, Changchun, China (in Chinese)
93. Li W, Gao F, Sun P (2006) Design of composite material wheelof planetary rover. J Jinlin Univ Eng Technol Ed 36(4):502–505(in Chinese)
94. Zhang P, Deng ZQ, Hu M et al (2008) Mobility performance anal-ysis of lunar rover based on terramechanics. In: Proceedings ofthe 2008 IEEE and ASME International Conference on AdvancedIntelligent Mechanism, Xi’an, China, pp 120–125
95. Liu JC, Deng ZQ, Gao HB (2007) Research on wheel configura-tion for planetary rover. J Mach Des Manuf 2007(11):209–211(in Chinese)
96. Gromov V (1999) Physical and mechanical properties of lunarand planetary soils. Earth Moon Planets 1999(80):51–72
97. Moore HJ, Clow GD, Hutton RE (1982) A summary of Vikingsample trench analyses for angles of internal friction and cohe-sion. J Geophys Res 87(30):10043–10050
98. The Rover Team (1997) Characterization of the Martian sur-face deposits by the Mars Pathfinder rover Sojourner. Science278(5344):1765–1768
99. Arvidson RE, Anderson RC, Bartlett P et al (2004) Localizationand physical property experiments conducted by Opportunity atMeridiani Planum. Science 306(5702):1730–1733
100. Arvidson RE, Anderson RC, Haldemann AFC et al (2003)Physical properties and localization investigations associatedwith the 2003 Mars exploration rovers. J Geophys Res108(E12):8070
101. Arvidson RE, Anderson RC, Bartlett P et al (2004) Localizationand physical properties experiments conducted by Spirit at GusevCrater. Science 305(5685):821–824
102. Iagnemma K, Kang S, Brooks C, Dubowsky S (2003) Multi-sensor terrain estimation for planetary rovers. In: Proceedingsof the 7th i-SAIRAS, Nara, Japan
103. Hutangkabodee S, Zweiri YH, Seneviratne LD et al (2006) Soilparameter identification for wheel-terrain interaction dynamicsand traversability prediction. Int J Autom Comput 2006(3):244–251
104. Deng ZQ, Ding L, Gao HB, Yoshida K, Nagatani K (2010) Influ-ence of soil properties on lunar rover’s wheel–soil interactionmechanics. J Harbin Inst Technol (in press, in Chinese)
105. Ding L, Yoshida K, Nagatani K, Gao HB, Deng ZQ (2009) Param-eter identification for planetary soil based on decoupled analyticalwheel–soil interaction terramechanics model, In: Proceedings ofthe 2009 IROS, St. Louis, MO, USA, pp 4122–4127
106. Ding L, Gao HB, Deng ZQ, Tao JG (2010) Wheel–soil interac-tion mechanics model for lunar rover: decoupling and application.J Harbin Inst Technol (in press, in Chinese)
107. Ding L, Gao HB, Deng ZQ, Song PL, Liu RQ (2008) Designof comprehensive high-fidelity/high-speed virtual simulation sys-tem for lunar rover. In: Proceedings of the 2008 IEEE Interna-tional Conference on Robotics, Automation and Mechatronics,Chengdu, China, pp 1118–1123
108. Yen J, Jain A, Balaram J (1999) ROAMS: rover analysis model-ing and simulation software. In: Proceedings of the 5th i-SAIRAS,Noordwijk, The Netherlands
109. Jain A, Balaram J, Cameron J et al (2004) Recent developmentsin the ROAMS planetary rover simulation environment. In: Pro-ceedings of the IEEE Aerospace Conference, Big Sky, Montana,USA, pp 861–875
110. Lamon P, Siegwart R (2005) Wheel torque control in rough ter-rain—modeling and simulation. In: Proceedings of 2005 ICRA,Barcelona, Spain, pp 867–872
111. Lindemann RA, Bickler DB, Harrington BD et al (2006) Marsexploration rover mobility development—mechanical mobilityhardware design, development and testing. IEEE Robot AutomMag 13(2):19–26
112. Tong G (2007) Study on simulation platform of lunar rover basedon ADAMS. Master thesis, Jilin University, Changchun, China(in Chinese)
113. Tao JG, Deng ZQ, Fang HT et al (2006) Development of a wheeledrobotic rover in rough terrains. In: Proceedings of the 6th WorldCongress on Intelligent Control and Automation, Dalian, China,pp 9272–9276
114. Wang MY (2008) Research on lunar rover simulation in rough ter-rain. Master thesis, Harbin Institute of Technology, Harbin, China(in Chinese)
115. Yoshida K, Asai H, Hamano H (2001) Motion dynamics simula-tions and experiments of an exploration rover on natural terrain.In: Proceedings of the 6th i-SAIRAS, Montrl, Canada
116. Ding L, Nagatani K, Sato K, Mora A, Yoshida K, Gao HB, DengZQ (2010) Terramechanics-based high-fidelity dynamics simula-tion for wheeled mobile robot on deformable rough terrain. In:Proceedings of 2010 ICRA, Anchorage, Alaska, USA, pp 4922–4927
117. Iagnemma K, Dubowsky S (2000) Mobile robot rough-terraincontrol (RTC) for planetary exploration. In: Proceedings of the26th Biennial Mechanisms and Robotics Conference, Baltimore,MD, USA
123

38 Intel Serv Robotics (2011) 4:17–38
118. Iagnemma K, Dubowsky S (2004) Traction control of wheeledrobotic vehicles in rough terrain with application to planetaryrovers. Int J Robot Res 23(10–11):1029–1040
119. Iagnemma K (2001) Rough-terrain mobile robot planning andcontrol with application to planetary exploration. Doctoral thesis,Massachusetts Institute of Technology, Cambridge, MA, USA
120. Iagnemma K, Rzepniewski A, Dubowsky S et al (2003) Controlof robotic vehicles with actively articulated suspensions. AutonRobot 2003(14):5–16
121. Kewlani G, Iagnemma K (2008) A stochastic response sur-face approach to statistical prediction of mobile robot mobility.In: Proceedings of the 2008 IROS, Nice, France, pp 2234–2239
122. Ishigami G, Kewlani G, Iagnemma K (2009) Predictablemobility. IEEE Robot Autom Mag 16(4):61–70
123. Ishigami G, Kewlani G, Iagnemma K (2010) Statistical mobilityprediction for planetary surface exploration rovers in uncertainterrain. In: Proceedings of the 2010 ICRA, Anchorage, Alaska,USA
124. Lamon P, Krebs A, Lauria M et al (2004) Wheel torque controlfor a rough terrain rover. In: Proceedings of 2004 ICRA, NewOrleans, LA, USA, pp 4682–4687
125. Yoshida K, Hamano H (2002) Motion dynamics of a rover withslip-based traction model. In: Proceedings of 2002 ICRA, Wash-ington, DC, USA, pp 3155–3160
126. Yoshida K, Watanabe T, Mizuno N et al (2003) Slip, traction con-trol, and navigation of a lunar rover. In: Proceedings of the 7thi-SAIRAS, Nara, Japan
127. Yoshida K, Watanabe T, Mizuno N et al (2006) Terramechan-ics-based analysis and traction control of a lunar/planetary rover.
Field and Service Robotics of Springer Tracts in Advanced Robot-ics 2006(24):225–234
128. Ishigami G, Miwa A, Yoshida K (2005) Steering trajectory anal-ysis of planetary exploration rovers based on all-wheel dynamicsmodel. In: Proceedings of the 8th i-SAIRAS, Munich, Germany
129. Ishigami G (2008) Terramechanics-based analysis and control forlunar/planetary exploration robots. Doctoral thesis, Tohoku Uni-versity, Sendai, Japan
130. Ishigami G, Nagatani K, Yoshida K (2009) Slope traversal con-trols for planetary exploration rover on sandy terrain. J Field Robot26(3):264–286
131. Reina G, Ishigami G, Nagatani K, Yoshida K (2008) Vision-basedestimation of slip angle for mobile robots and planetary rovers.In: Proceedings of 2008 ICRA, Pasadena, CA, USA, pp 2295–2300
132. Ding L, Gao HB, Deng ZQ, Yoshida K, Nagatani K (2009) Slipratio for lugged wheel of planetary rover in deformable soil: def-inition and estimation. In: Proceedings of 2009 IROS, St. Louis,MO, USA, pp 3343–3348
133. Ding L, Gao HB, Deng ZQ, Liu Z (2010) Slip-ratio-coordinatedcontrol of planetary exploration robots traversing over deformablerough terrain. IEEE/RSJ International Conference on IntelligentRobots and Systems, Taipei, Taiwan, China, pp 4958–4963
134. Yoshida K (2009) Achievements in space robotics. IEEE RobotAutom Mag 16(4):20–28
135. Wang W (2002) Dynamics, control of a six-wheeled lunar roverlocomotion system and its simulation technique. Doctoral thesis,Harbin Institute of Technology, Harbin, China (in Chinese)
123







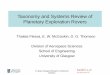


















![⃝[anthony young] lunar and planetary rovers](https://img.pdfslide.net/doc/110x75/568caa611a28ab186da15ce8/anthony-young-lunar-and-planetary-rovers.jpg)


