Embed Size (px)
Citation preview

Planning as Satisfiability
CSE 574 April 8, 2003Dan Weld
Schedule• BASICS
Intro Graphplan SATplan State-space Refinement
• SPEEDUP TECHNIQUES• SIMULTANEOUS + DURATIVE ACTIONS• INCOMPLETE INFORMATION• INTERLEAVED PLANNING + EXECUTION• DECISION-THEORETIC PLANNING
The Idea
• Suppose a plan of length n exists• Encode this hypothesis in SAT
Init state true at t0
Goal true at Tn
Actions imply effects, etc
• Look for satisfying assignment• Decode into plan
RISC: The Revolutionary Excitement

History• Green IJCAI-69• STRIPS AIJ-71• Decades of work on “specialized theorem provers”• Kautz+Selman ECAI-92• Rapid progress on SAT solving• Kautz+Selman AAAI-96
Electrifying results (on hand coded formulae)
• Kautz, McAllester & Selman KR-96 Variety of encodings (but no compiler)
• CSE 573 => Ernst et al. IJCAI-97
Blackbox• Blackbox solves planning problems by
converting them into SAT. Very fast Tried different solvers
• Local search (GSAT)• Systematic search with EBL (RelSAT)• In 2000, GP-CSP could beat Blackbox
– But in 2001, a newer “SUPER-DUPER” SAT solver called CHAFF was developed, that significantly speeds up Graphplan
» By folks in CAD community (EE folks—see getting other people to do our work)
– Currently, CSP people are trying to copy over the ideas from CHAFF to CSP.
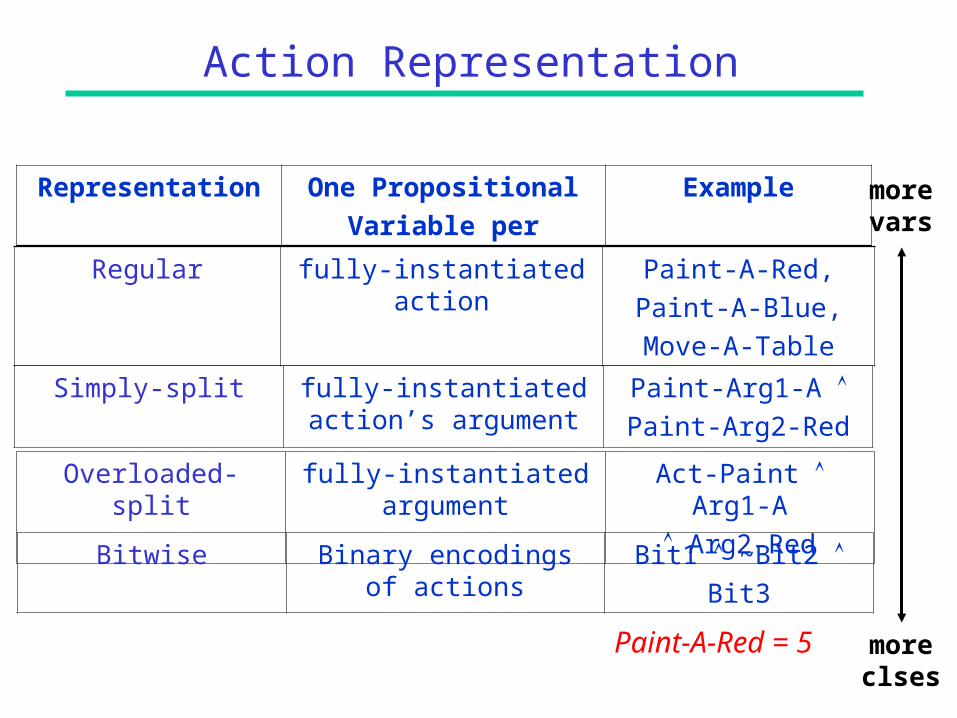
Action Representation
Regular fully-instantiated action
Paint-A-Red,Paint-A-Blue,Move-A-Table
Representation One PropositionalVariable per
Example
Simply-split fully-instantiated action’s argument
Paint-Arg1-A Paint-Arg2-Red
Overloaded-split fully-instantiated argument
Act-Paint Arg1-A Arg2-Red
morevars
moreclses
Bitwise Binary encodings of actions
Bit1 ~Bit2 Bit3
Paint-A-Red = 5
Small # Variables, Literals
• Variables for actions at t Regular = n Bitwise = log(n)

Main Ideas
• Clear taxonomy• Utility of
Explanatory frame axioms (most things don’t change)
Parallelism & conflict exclusion Type inference Domain axioms
• Surprising Effectiveness of regular action encodings
Comparison Among Encodings
• Explanatory Frames are superior to classical- few actions affect each fluent- explanatory frames aid simplifications
• Parallelism is a major factor- fewer mutual exclusion clauses- fewer time steps
• Regular actions representation is smallest!- exploits full parallelism- aids simplification
• Overloaded, bitwise reps. are infeasible- prohibitively many clauses- sharing hinders simplification
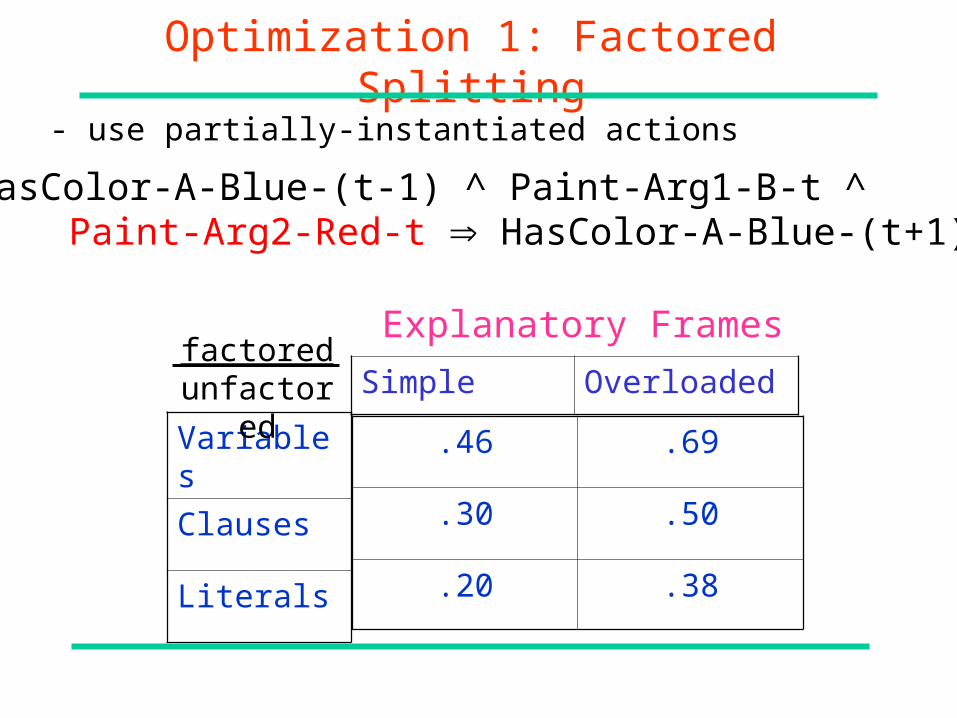
Optimization 1: Factored Splitting
- use partially-instantiated actions
HasColor-A-Blue-(t-1) ^ Paint-Arg1-B-t ^Paint-Arg2-Red-t HasColor-A-Blue-(t+1)
.46 .69
.30 .50
.20 .38
Simple Overloaded
Variables
Clauses
Literals
factoredunfactored
Explanatory Frames

Optimization 2: Types
A type is a fluent which no actions affects.• type interference• prune impossible operator
instantiations• type elimination
.27 .39 .34 .30
.10 .97 .67 .74
Classical
Explanatory
Type optsNo type opts
Regular Simple Overloaded
BitwiseLiterals
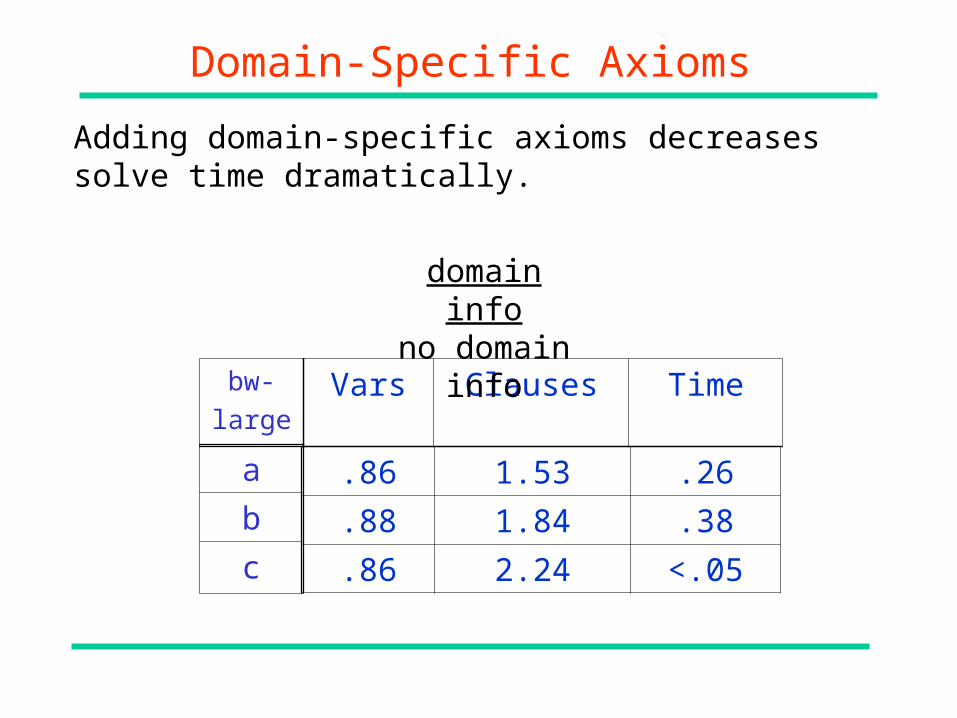
Domain-Specific Axioms
Adding domain-specific axioms decreases solve time dramatically.
.86 1.53 .26
.88 1.84 .38
.86 2.24 <.05
Vars Clauses Time
a
b
c
domain infono domain info
bw-large
Weaknesses
• Too much info, poor organization• Graphs – lots of data, little insight• Characterize best/worst domain /
encoding• No experiments on effects of type opt
Future Work
• Negation, disjunctive preconds, • Domain axioms
t clear(x, t) y on(y, x, t)
Future Work
• Automatically choose best encoding Might do this for frame axioms
• Automating domain axioms (invariants)• Use bounds on plan-length
Rather than linear or binary search
• Resource Planning• Compilation to …?

Domain Axioms• Domain knowledge
Synchronic vs. Diachronic constraints• Speedup knowledge
Action conflicts (=> by action schemata alone)
Domain invariants (=> by initial state+schemata)
Optimality heuristics
Simplifying assumptions

Sample Metric Planning Problem
Ship RedVines from one location to another Fuel used by moving Maximum fuel level in truck Maximum load for truck Limited amount of available RedVines
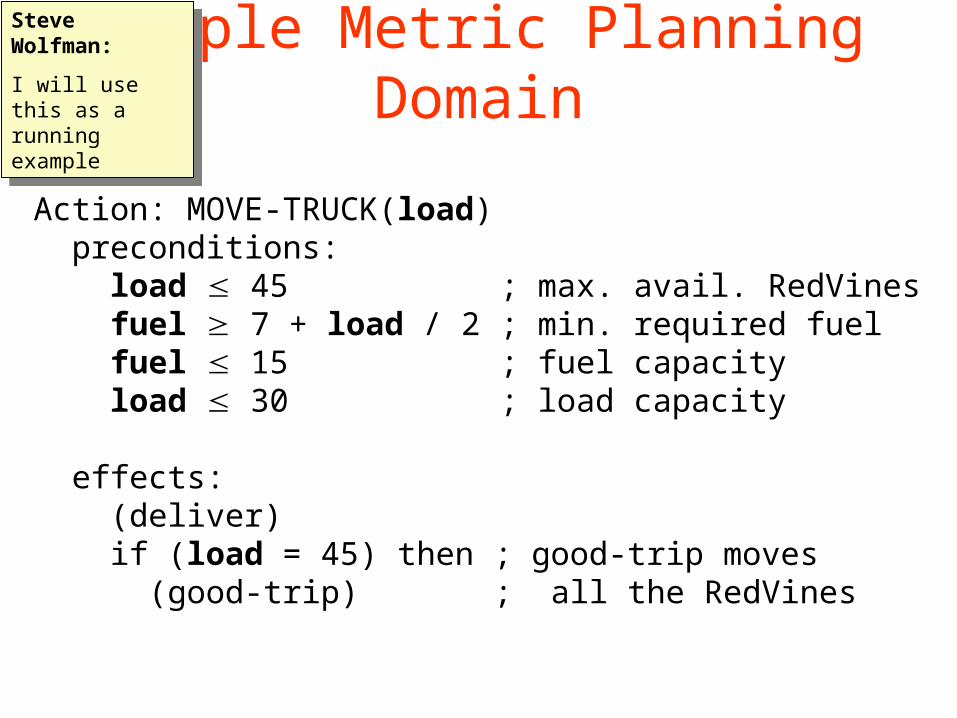
Sample Metric Planning Domain
Action: MOVE-TRUCK(load) preconditions: load 45 ; max. avail. RedVines fuel 7 + load / 2 ; min. required fuel fuel 15 ; fuel capacity load 30 ; load capacity
effects: (deliver) if (load = 45) then ; good-trip moves (good-trip) ; all the RedVines
Steve Wolfman:
I will use this as a running example
Steve Wolfman:
I will use this as a running example
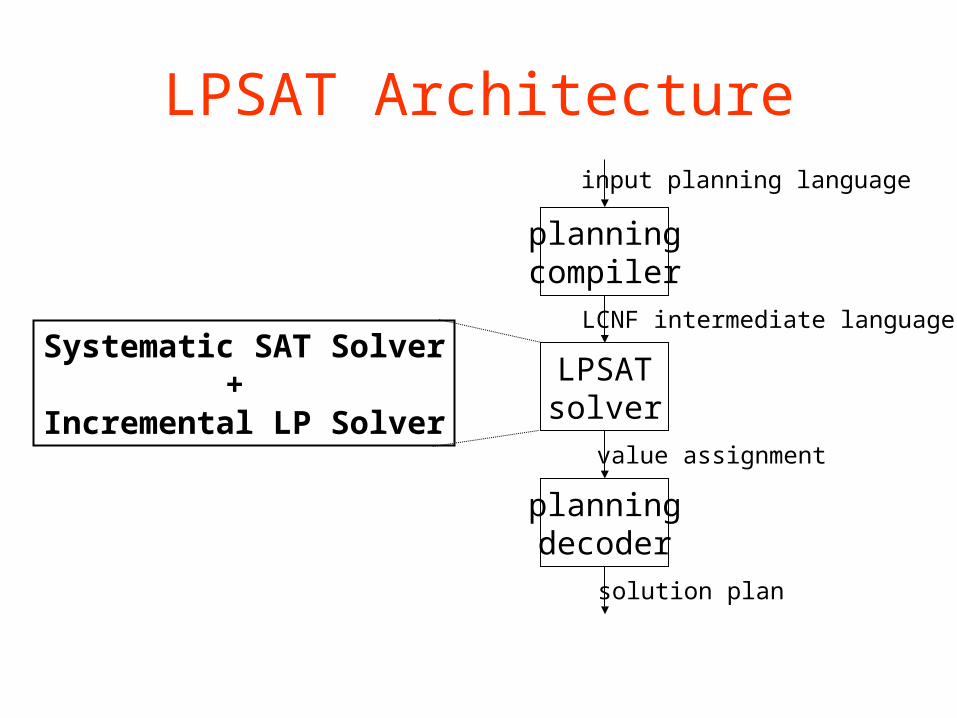
LPSAT Architecture
planningcompiler
LPSATsolver
planningdecoder
input planning language
LCNF intermediate language
value assignment
solution plan
Systematic SAT Solver+
Incremental LP Solver

LCNF Language
CNF formula with triggered constraints Boolean variable triggers one (or no)
constraint Constraint triggered iff its trigger
variable’s truth assignment is true Truth/real-value assignment is a
solution iff •CNF formula is satisfied•All triggered constraints are satisfied

Sample Problem in LCNF
good-trip1
deliver1
move-truck0 max-load
move-truck0 max-fuel
move-truck0 min-fuel
move-truck0 deliver1
(move-truck0 all-loaded)
good-trip1
...
max-load:
load 30max-fuel:
fuel 15min-fuel:
fuel 7 + load/2all-loaded:
load = 45
...
CNF formula Constraint triggers
Variable names and, in particular, trigger names added for clarity
Variable names and, in particular, trigger names added for clarity
That’s the front end of the system; the back end simply reads off which actions are assigned true and what the constraint vars values are
That’s the front end of the system; the back end simply reads off which actions are assigned true and what the constraint vars values are
Set aside for later use!Set aside for later use!
LPSAT
• Inputs LCNF subset Supports operators +, -, *, and Restricts constraints to linear
(in)equalities
• Outputs truth/real-value assignment or reports failure Sound Complete Satisficing
As opposed to optimizing
As opposed to optimizing

SOLVER Architecture
SatisfiabilitySolver
Linear Programming
System
new/revoked constraints
consistency info,real variable values
input problem
solution
LPSAT DesignSAT controller calls LP black box• SAT solver based on RelSAT [Bayardo&Schrag]
Systematic solver Sound and complete Gradual changes to constraint set Learning/backjumping based on conflict sets
• LP system is Cassowary [Badros&Borning] supports linear constraints over real variables fast updates to constraint set
Explores all possible truth assignments without repeating any
Explores all possible truth assignments without repeating any
LPSAT Algorithm
Procedure LPSAT(φ: LCNF problem)If φ is satisfied, return YESElse if φ is inconsistent, return NOElse if there is a unit clause {} or pure literal
in φ, return LPSAT(φ|)Else choose a variable in φ. If LPSAT(φ|),
return YESElse, return LPSAT(φ|)
Put on other projector
Put on other projector
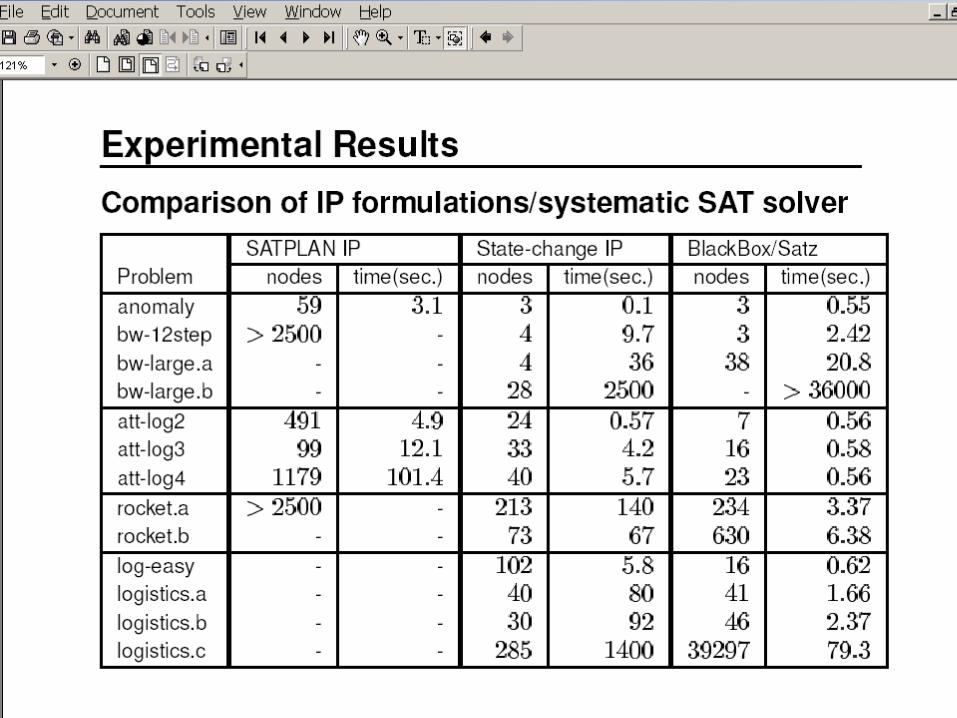
Experimental Results
• Tested against Zeno planner Many times faster than Zeno Solved problems Zeno could not solve
• Tested conflict set discovery techniques Without learning/backjumping (slow) With global conflict sets (faster) With minimal conflict sets (fastest)
Under resource bounds (memory)
Under resource bounds (memory)
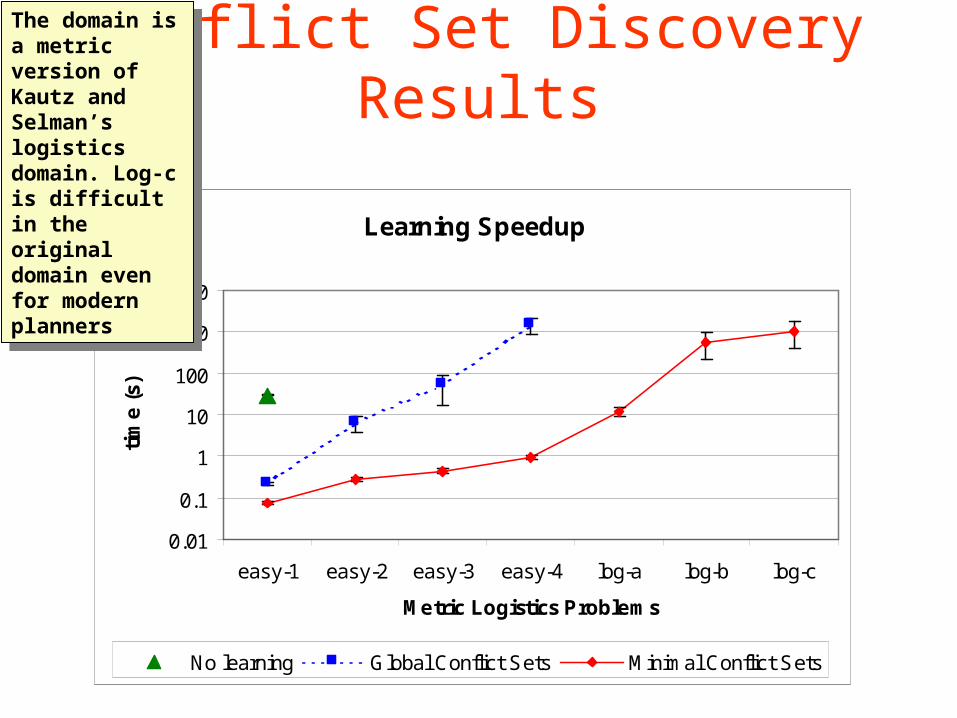
Learning Speedup
0.01
0.1
1
10
100
1000
10000
easy-1 easy-2 easy-3 easy-4 log-a log-b log-c
Metric Logistics Problems
tim
e (s
)
No learning Global Conflict Sets Minimal Conflict Sets
Conflict Set Discovery ResultsThe domain is a metric version of Kautz and Selman’s logistics domain. Log-c is difficult in the original domain even for modern planners
The domain is a metric version of Kautz and Selman’s logistics domain. Log-c is difficult in the original domain even for modern planners

Alternative encodings..
• The problem of finding a valid plan from the planning graph can be encoded on any combinatorial substrate
• Alternatives: CSP [GP-CSP] SAT [Blackbox; SATPLAN] IP [Vossen et al.] BDDs [Cimatti ….]
SAT is CSP w
ith B
oolean
Variables

Compilation to CSP[Do & Kambhampati, 2000]
Variables: Propositions (In-A-1, In-B-1, ..At-R-E-0 …)Domains: Actions supporting that proposition in the plan In-A-1 : { Load-A-1, #} At-R-E-1: {P-At-R-E-1, #} Constraints: Mutual exclusion ~[ ( In-A-1 = Load-A-1) & (At-R-M-1 = Fly-R-1)] ; etc..
Activation In-A-1 != # & In-B-1 != # (Goals must have action assignments) In-A-1 = Load-A-1 => At-R-E-0 != # , At-A-E-0 != # (subgoal activation constraints)
[Corr
esp
onds
to a
regre
ssio
n-b
ase
d p
roof]
At(R,E)
At(A,E)
At(B,E)
1: Load(A)
2 : Load(B)
3 : Fly(R)
P-At(R,E)
P-At(A,E)
P-At(B,E)
In(A)
In(B)
At(R,M)
At(R,E)
At(A,E)
At(B,E)
Goals: In(A),In(B)
CSP: Given a set of discrete variables,the domains of the variables, and constraints on the specific values a set of variables can take in combination, FIND an assignment of values toall the variables which respects all constraints

CSP Encodings can be more compact: GP-CSP
Graphplan Satz Relsat GP-CSP
Problem time (s) mem time(s) mem time (s) mem time (s) mem
bw-12steps 0.42 1 M 8.17 64 M 3.06 70 M 1.96 3M
bw-large-a 1.39 3 M 47.63 88 M 29.87 87 M 1.2 11M
rocket-a 68 61 M 8.88 70 M 8.98 73 M 4.01 3M
rocket-b 130 95 M 11.74 70 M 17.86 71 M 6.19 4 M
log-a 1771 177 M 7.05 72 M 4.40 76 M 3.34 4M
log-b 787 80 M 16.13 79 M 46.24 80 M 110 4.5M
hsp-bw-02 0.86 1 M 7.15 68 M 2.47 66 M .89 4.5 M
hsp-bw-03 5.06 24 M > 8 hs - 194 121 M 4.47 13 M
hsp-bw-04 19.26 83 M > 8 hs - 1682 154 M 39.57 64 M
Do & Kambhampati, 2000
Compilation to LP
MotivationsAbility to handle numeric quantities, and optimizeHeuristic value of the LP relaxation of ILP problems
Conversion Convert a SAT/CSP encoding to ILP inequalities
E.g. X v ~Y v Z => x + (1 - y) + z >= 1
Explicitly set tighter ILP inequalities (Cutting constraints)If X,Y,Z are pairwise mutex, we can write x+y+z <= 1 (instead of x+y <=1 ; y+z <=1 ; z +x <= 1)
[ Walser &
Kautz;
Vossen et. al;
Bockmayr & Dimopolous]
Integer Linear Programming: Given a set of real valued variables, a linear objective function on the variables, a set of linear inequalities on the variables, and a set of integrality restrictions on the variables, Find the values of the feasible variables for which the objective function attains the maximum value -- 0/1 integer programming corresponds closely to SAT problem
Vossen/Ball/Lotem/Nau work Vossen et. Al. [IJCAI 99] tried two different IP encodings
1. Simple conversion of PG SAT encoding to IP (last slide)2. Two new ideas
Compile away proposition variables.• The change of truth value of a proposition is equated to the
occurrence of one of the actions that can give that proposition. • This is basically a known transformation—see the
McAllester/Kautz/Selman paper. (see next slide) Reformulate the constraints to make better use of
expressiveness provided by IP• E.g. IP is particularly good at compactly encoding n-ary mutex
constraints—even for n>2• To say only one of X1..Xn can be true, we just say X1+X2+…Xn <= 1 • In SAT, we have to write n constraints of the form
– Xi => ~X1,~X2…~Xi-1,~Xi+1,….~Xn• (IP, on the other hand, will have harder time representing “All-
different” constraints)
Performance of IP Encodings
• As seen in the previous slide, IP encodings are not competitive with SAT/CSP encodings for classical planning Aren’t exercizing the “optimizing” properties of IP, Aren’t exercizing its ability to encode numerical variables
• IP may well do better if we are interested in finding “cost-optimal” plans of a given makespan (length) No one has confirmed this as yet…
• IP encodings may well be more useful when we have numerical quantities such as actions consuming metric resources (preconditions and effects involve numbers) See the work by Kautz and Walser(AAAI-99) or LPSat (Wolfman/Weld—IJCAI 99).

Tradeoffs as f(compilation substrates)
• CSP encodings support implicit representations More compact encodings [Do & Kambhampati, 2000] Easier integration with Scheduling techniques
• ILP encodings support numeric quantities Seamless integration of numeric resource constraints [Walser & Kautz, 1999] Not competitive with CSP/SAT for problems without numeric constraints
• SAT encodings support axioms in propositional logic form May be more natural to add (for whom ;-) Very active research on finding faster solvers..
• Davis Putnam ( Satz; RelSat; Chaff)• Gsat
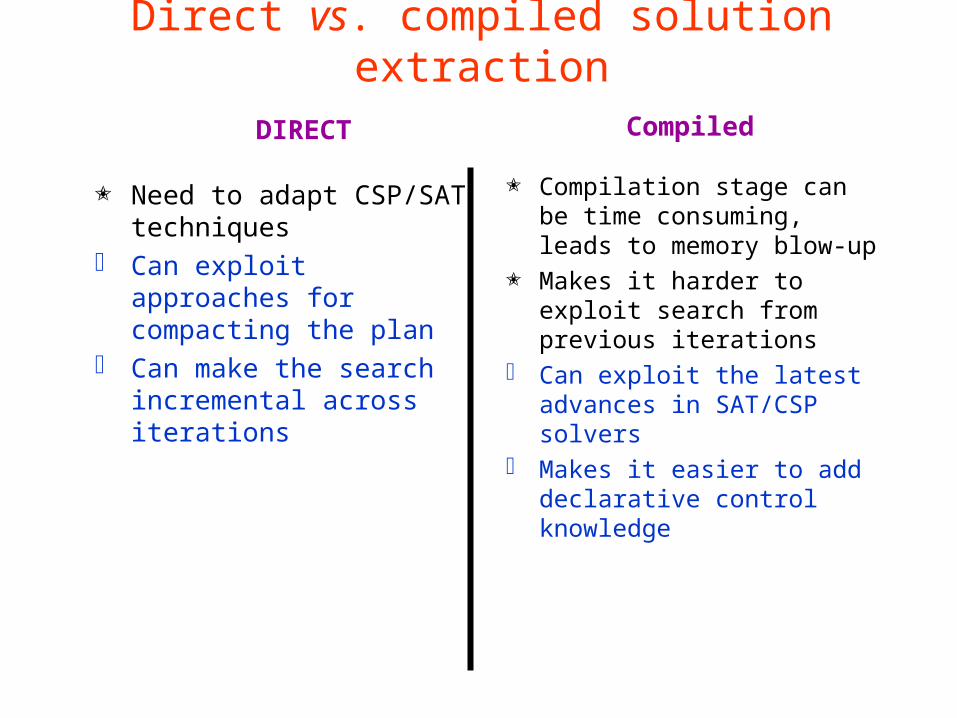
Direct vs. compiled solution extraction
Need to adapt CSP/SAT techniques
Can exploit approaches for compacting the plan
Can make the search incremental across iterations
Compilation stage can be time consuming, leads to memory blow-up
Makes it harder to exploit search from previous iterations
Can exploit the latest advances in SAT/CSP solvers
Makes it easier to add declarative control knowledge
DIRECT Compiled
Resource Planning
Challenges in SAT

![What is answer set programming to propositional satisfiability · 1 Introduction Propositional satisfiability (or satisfiability) [6] and answer set programming [7]aretwo closely](https://img.pdfslide.net/doc/110x75/5f0725b47e708231d41b8a72/what-is-answer-set-programming-to-propositional-satisfiability-1-introduction-propositional.jpg)