Embed Size (px)
Citation preview

PO
LIPO
LI
di
di M
IM
Itecn
ico
tecn
ico
lano
lano
OPTIMAL PRECONDITIONERS FOR THE SOLUTION OF CONSTRAINED
MECHANICAL SYSTEMS IN INDEX THREE FORM
Carlo L. Bottasso, Lorenzo TrainelliPolitecnico di Milano, Italy
Daniel Dopico
University of La Coruña, Spain
ACMD 2006The University of Tokyo
Komaba, Tokyo, August 1-4, 2006
OPTIMAL PRECONDITIONERS FOR THE SOLUTION OF CONSTRAINED
MECHANICAL SYSTEMS IN INDEX THREE FORM
Carlo L. Bottasso, Lorenzo TrainelliPolitecnico di Milano, Italy
Daniel Dopico
University of La Coruña, Spain
ACMD 2006The University of Tokyo
Komaba, Tokyo, August 1-4, 2006

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
OutlineOutline
• Introduction and background, with specific reference to Newmark’s method;
• Conditioning and sensitivity to perturbations of index 3 DAEs;
• Optimal preconditioning by scaling;
• Conclusions:
Index 3 DAEs can be made as easy to integrate as well behaved ODEs!

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
Constrained mechanical (multibody) systems in index 3 form:
where
• Displacements:
• Velocities:
• Lagrange multipliers:
• Constraint Jacobian:
Index 3 Multibody DAEsIndex 3 Multibody DAEs
M v0= f (u;v;t) + G(u;t) ¸ ;
u0= v;
0= ©(u;t);
u
v
¸
G := ©;Tu

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
Newmark’s methodNewmark’s method in three-field form (Newmark 1959):
and similarly for HHT, generalized-α, etc.
RemarkRemark: the analysis is easily extended to other integration other integration methodsmethods, for example BDF-type integrators (Bottasso et al. 2006).
Newmark’s MethodNewmark’s Method
1° h
M (vn+1 ¡ vn) = f n+1 +Gn+1¸ n+1 ¡µ
1¡1°
¶M an ;
un+1 ¡ un = hµ
¯°
vn+1 +µ
1¡¯°
vn
¶¶¡
h2
2
µ1¡
2¯°
¶an;
0= ©n+1;

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
Solving with Newton’s methodNewton’s method at each time step:
where the iteration matrix is
and the right hand side is
Linearization of Newmark’s MethodLinearization of Newmark’s Method
Displacements
Velocities
Multipliers
{ { {Kinematic eqs.
Equilibrium eqs.
Constraint eqs.
{
{
{
J q = ¡ b;
J =
2
6664
X1
° hU ¡ G
I ¡¯ h°
I 0
GT 0 0
3
7775
X := ¡ (f ;u )n+1 ¡³(G ¸ );u
´
n+1;
Y := ¡ (f ;v)n+1 ;
U := M +° hY :
b =
0
BB@
1° h M (vn+1 ¡ vn) ¡ (f n+1 + Gn+1¸ n+1) +
³1¡ 1
°
´M an
un+1 ¡ un ¡ h³
¯° vn+1 +
³1¡ ¯
° vn
´´+ h2
2
³1¡ 2¯
°
´an
©n+1
1
CCA :

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
Model effects of finite precision arithmeticsfinite precision arithmetics by means of the small parameter :
Perturbation AnalysisPerturbation Analysis
b(h;") = b(h;0) +"@b@"
¯¯¯¯(h;0)
+O("2);
J (h;") = J (h;0) + "@J@"
¯¯¯¯(h;0)
+ O("2);
q(h;") = q(h;0) +"@q@"
¯¯¯¯(h;0)
+ O("2):
"
¯¯¯¯limh! 0
qi (h;")¯¯¯¯·
°°°° lim
h! 0J ¡ 1(h;0)
°°°°
1
°°°° lim
h! 0b(h;")
°°°°
1
:
J q = ¡ b
limh! 0
q(h;0) = 0
limh! 0
b(h;0) = 0
Insert into and neglect higher order terms to get

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
Interpretation of the main result
If and/or depend on negative powers of , accuracy will be very poor for small time stepsaccuracy will be very poor for small time steps (this will spoil the order of convergencespoil the order of convergence of the integration scheme).
Perturbation AnalysisPerturbation Analysis
¯¯¯¯limh! 0
qi (h;")¯¯¯¯·
°°°° lim
h! 0J ¡ 1(h;0)
°°°°
1
°°°° lim
h! 0b(h;")
°°°°
1
:
J ¡ 1 b h

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
Apply perturbation analysis to three-field form:
AccuracyAccuracy of the solution:
RemarkRemark: severe loss of accuracy (ill conditioning) for small !
Perturbation Analysis of NewmarkPerturbation Analysis of Newmark
limh! 0
J =
2
4O(h0) O(h¡ 1) O(h0)O(h0) O(h1) 0O(h0) 0 0
3
5 ;
limh! 0
J ¡ 1 =
2
4O(h2) O(h0) O(h0)O(h1) O(h¡ 1) O(h¡ 1)O(h0) O(h¡ 2) O(h¡ 2)
3
5 :
h
¯¯¯¯limh! 0
¢ un+1
¯¯¯¯· O(h0);
¯¯¯¯limh! 0
¢ vn+1
¯¯¯¯· O(h¡ 1);
¯¯¯¯limh! 0
¢ ¸ n+1
¯¯¯¯· O(h¡ 2):
limh! 0
b=
8<
:
O(h¡ 1)O(h0)O(h0)
9=
;:

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
Perturbation Analysis of NewmarkPerturbation Analysis of Newmark
Perturbation analysis for other possible forms of Newmark’s method:
(u;v;a;¸ ) (u;v;¸ ) (u;¸ ) (v;¸ ) (a;¸ )¢ u O(h0) O(h0) O(h0) O(h0)¤ O(h0)¤¢ v O(h¡ 1) O(h¡ 1) O(h¡ 1)¤ O(h¡ 1) O(h¡ 1)¤¢ a O(h¡ 2) O(h¡ 2)¤ O(h¡ 2)¤ O(h¡ 2)¤ O(h¡ 2)¢ ¸ O(h¡ 2) O(h¡ 2) O(h¡ 2) O(h¡ 2) O(h¡ 2)

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
Index 3 Multibody DAEsIndex 3 Multibody DAEs
Solutions proposed in the literature:
• Index two formIndex two form (velocity level constraints), but drift and need for stabilization;
• Position and velocity level constraintsPosition and velocity level constraints (GGL of Gear et al. 1985, Embedded Projection of Borri et al. 2004), but increased cost and complexity;
• ScalingScaling, simple and straightforward to implement (related work: Petzold Lötstedt 1986, Cardona Geradin 1994, Negrut 2005).

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
Scale equationsScale equations and unknowns unknowns of Newton’s problem:
with
where
= left preconditioner, scales the equations;
= right preconditioner, scales the unknowns.
RemarkRemark: scale back unknowns once at convergence of Newton’s iterations for the current time step.
Left and Right PreconditioningLeft and Right Preconditioning
¹J ¹q = ¡ ¹b;
¹J := D L J D R ; ¹q := D ¡ 1R q; ¹b := D L b;
D L
D R

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
Left scaling:
Right scaling:
Accuracy of the solution:
RemarkRemark: accuracy (conditioning) independent of time step size, as for well behaved ODEs! Same results for all other forms of the scheme.
Optimal PreconditioningOptimal Preconditioning
Scale equilibrium eqs. by
D L =
2
4¯ h2I 0 0
0 I 00 0 I
3
5 h2
D R =
2
6664
I 0 0
0°
¯ hI 0
0 01
¯ h2I
3
7775
Scale velocities by
Scale Lagrange multipliers by
h2
h
¯¯¯¯limh! 0
¢ un+1
¯¯¯¯· O(h0);
¯¯¯¯limh! 0
¢ vn+1
¯¯¯¯· O(h0);
¯¯¯¯limh! 0
¢ ¸ n+1
¯¯¯¯· O(h0):

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
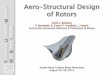
Numerical ExampleNumerical Example
Andrews’ squeezing mechanism:
At each Newton iteration, solve
Stop at first non-decreasingfirst non-decreasing Newton correction, i.e.:
A measure of the tightest achievable convergencetightest achievable convergence of Netwon method.
J j qj = ¡ bj
kqj +1k ¸ kqj k

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
Numerical ExampleNumerical Example

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
Numerical ExampleNumerical Example

Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
Op
tim
al S
calin
g o
f In
dex T
hre
e
Op
tim
al S
calin
g o
f In
dex T
hre
e
DA
Es
DA
Es
POLITECNICO di MILANO
ConclusionsConclusions
• DAEs can be made as easy to solve numerically as well DAEs can be made as easy to solve numerically as well behaved ODEsbehaved ODEs;
• Recipe for Newmark’s scheme:
- Use any form of the algorithm (two field forms are more computationally convenient);
- Use left andleft and right scalingright scaling of primary unknowns;
- RecoverRecover scaled quantities at convergence.
• Simple to implement in existing codes.






![CONGRESS AND EXHIBITION PROGRAMME Programme Download.pdf · [148] Automatic track and balance of wind turbine rotors M Bertelè, C L Bottasso, S Cacciola2 and M Domestici3 Technische](https://img.pdfslide.net/doc/110x75/5aa2206b7f8b9a46238ca742/congress-and-exhibition-programme-downloadpdf148-automatic-track-and-balance.jpg)