-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
1/22
http://usj.sagepub.com/Urban Studies
http://usj.sagepub.com/content/38/4/635The online version of
this article can be found at:
DOI: 10.1080/00420980120035268
2001 38: 635Urban StudMichael Batty
Polynucleated Urban Landscapes
Published by:
http://www.sagepublications.com
On behalf of:
Urban Studies Journal Limited
can be found at:Urban StudiesAdditional services and information
for
http://usj.sagepub.com/cgi/alertsEmail Alerts:
http://usj.sagepub.com/subscriptionsSubscriptions:
http://www.sagepub.com/journalsReprints.navReprints:
http://www.sagepub.com/journalsPermissions.navPermissions:
http://usj.sagepub.com/content/38/4/635.refs.htmlCitations:
What is This?
- Apr 1, 2001Version of Record>>
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/content/38/4/635http://usj.sagepub.com/content/38/4/635http://www.sagepublications.com/http://www.gla.ac.uk/urbanstudiesjournal/http://usj.sagepub.com/cgi/alertshttp://usj.sagepub.com/cgi/alertshttp://usj.sagepub.com/subscriptionshttp://usj.sagepub.com/subscriptionshttp://usj.sagepub.com/subscriptionshttp://www.sagepub.com/journalsReprints.navhttp://www.sagepub.com/journalsReprints.navhttp://www.sagepub.com/journalsPermissions.navhttp://usj.sagepub.com/content/38/4/635.refs.htmlhttp://usj.sagepub.com/content/38/4/635.refs.htmlhttp://online.sagepub.com/site/sphelp/vorhelp.xhtmlhttp://online.sagepub.com/site/sphelp/vorhelp.xhtmlhttp://online.sagepub.com/site/sphelp/vorhelp.xhtmlhttp://usj.sagepub.com/content/38/4/635.full.pdfhttp://usj.sagepub.com/content/38/4/635.full.pdfhttp://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://online.sagepub.com/site/sphelp/vorhelp.xhtmlhttp://usj.sagepub.com/content/38/4/635.full.pdfhttp://usj.sagepub.com/content/38/4/635.refs.htmlhttp://www.sagepub.com/journalsPermissions.navhttp://www.sagepub.com/journalsReprints.navhttp://usj.sagepub.com/subscriptionshttp://usj.sagepub.com/cgi/alertshttp://www.gla.ac.uk/urbanstudiesjournal/http://www.sagepublications.com/http://usj.sagepub.com/content/38/4/635http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
2/22
Urban Studies, Vol. 38, No. 4, 635655, 2001
Polynucleated Urban Landscapes
Michael Batty
[Paper received in nal form, December 2000]
Summary. City systems show a degree of resilience and
persistence that has rarely been
emphasised in urban theory. There is a fascination for recent
and contemporary change which
suggests that phenomena such as the rise of the edge city, for
example, comprise the predomi-
nant forces determining how a polynucleated landscape of cities
is emerging. We argue here that
such explanations of polynucleation are largely f alse. Urban
settlement structures from much
earlier times are persistent to a degree that is extraordinary.
We show this in two ways: rst,
from empirical evidence of stable rank size relations in the
urban settlement system for Great
Britain over the past 100 years; and, secondly, from simulations
based on weak laws of
proportionate effect which produce aggregate patterns entirely
consistent with these empirical
relations. We then propose various spatially disaggregate models
of urban development which
generate an evolution of polynucleated settlement from initial,
random distributions of urban
activity. These models simulate the repeated action of agents
locating and trading in space which
illustrate how early settlement patterns are gradually
reinforced by positive feedback. Theseproduce lognormally
distributed settlement structures that are characteristic of city
systems in
developed countries. In this way, we begin to explain how
aggregate urban structures persist in
spite of rapid and volatile micro change at more local levels of
locational decision-making.
Polynucleated urban landscapes are clear evidence of this
phenomenon.
1. Continuity and Persistence in Urban
Systems
George Holmes in his Preface to The OxfordHistory of Medieval
Europe says:
Most Europeans live in towns and villages
which existed in the lifetime of St.
Thomas Aquinas, many of them in the
shadow of churches built in the 13th cen-
tury. That simple physical identity is the
mark of a deeper continuity (Holmes,
1992, p. iii).
This deeper continuity referred to by
Holmes has not been central to the theory of
cities developed over the past half century.Theorists and
commentators have preferred
to emphasise urban development as embody-
ing new events such as edge cities which
reect changing lifestyles and new technolo-
gies. There has been little attention given to
explaining urban development as patterns of
settlement which persist and whose contem-
porary form is the product of a myriad of
historical decisions, many of them buried
deep in the past. Yet the evidence is clear.
Cities and their structures are long-lived af-
Michael Batty is in the Centre for Advanced Spatial Analysis,
University College London, 119 Torrington Place, London, WC1E6BT,
UK. Fax: 0171 813 2843. E-mail: [email protected]. The author
wishes to thank Danny Dorling of Leeds University for providingthe
updated population series from 1901 to 1991. Sanjay Rana of CASA
wrote the programme to scan the simulated images for theranksize
computations for the agent-based models. This research has been
partly nanced by the ESRC NEXSUS Project: Network
for Complexity and Sustainability (L326253048).
0042-0980 Print/1360-063X On-line/01/040635-21 2001 The Editors
of Urban Studies
DOI: 10.1080/00420980120035268by guest on December 14,
2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
3/22
MICHAEL BATTY636
fairs, where new locations which appear
from nowhere so to speak, are the exceptionrather than the rule
(Hohenberg and Lees,
1985). Where new development does occur,
it is largely due to growth into virgin terri-
tory and even there, such development is
often built on an earlier, more stable and
lasting structure of villages and farmsteads.
If you look at populations in southern
England, everyone still lives within 4 miles
of churches which had been planted by the
15th century. In Buffalo, New York, every-
one comprising the population in the metro-
politan area lives within 3 miles of
farmsteads that existed in 1820 (Batty and
Howes, 1996). Batten, in his discussion ofnetwork citiescities
which have grown to-
gether to form specialised polynucleated
formssuggests that:
The seeds of such a network economy
were sown as far back as the 11th century,
when safer trade routes triggered the re-
vival of many medieval cities in Europe
(Batten, 1995, p. 319).
In fact, quite simple explanations of the
growth of cities from initially randomly dis-
tributed rural populations to agriculturally
based market systems as reected in central
place theory, and thence to urban landscapes
structured around industrial resources, appear
quite adequate. Within such landscapes, re-
structuring takes place incessantly with new
nodes of specialised production and market-
ingedge cities in the current jargon (Gar-reau, 1991)clearly
occurring. But in terms
of the volume of activity, these nodes are
small, with most of the developed urban
landscapeas in North America and western
Europerestructuring itself and growing
into its older, more established pattern of
settlement.Systems like this are path-dependent in
that history dictates how they evolve andhow they restructure
(Arthur, 1988). Deci-
sions which are made early in the history of
urban development, often for entirely expedi-
ent reasons, determine future decisions
through positive feedbacks which in turn re-
inforce existing forms and functions. Given
enough time and the continual effect of such
feedback, systems such as cities exhibit adegree of persistence
and continuity which is
increasingly difcult to break (Batty, 1998).
Although new events do deviate from the
long-term pattern, at any point in time these
are never sufcient to set the system on a
new trajectory. Cities do rise and fall, but
only over long periods where locational ad-
vantages change slowly. New settlement pat-
terns do emerge, but these are usually due to
growth into previously undeveloped re-
gionsthe frontieror to the gradual lling-
in of earlier patterns where the ultimate
structure which emerges is based upon rein-
forcing embryonic structures established inearlier times.
This is but only one plausible explanation
of urban evolution. In this paper, we will tell
a story which is consistent with the fact that
most urban development is rooted in his-
tory, bringing to the fore the argument thathistory matters.
First, we will argue that
appropriate aggregate measures of settlement
which reveal continuity and persistence inurban development,
should be based on vari-
ants of rank size relations associated with
city populations. These relations have been
shown to be stable over long periods of time
and we will present our empirical evidence
for such continuities using data from Britain
over the past 100 years. We complement this
by arguing that weak positive feedback is
both necessary and sufcient to persistent
urban structures and we illustrate this froman aggregate
simulation of settlement pat-
terns using the standard growth model based
on random processes of proportionate effect.
We then introduce a class of spatial mod-
els operating at a ne scale in which individ-
ual agents of a population move, grow and
decline through processes of decision-making incorporating
positive feedback. We
elaborate the model in various ways, nallydemonstrating how
initial patterns of settle-
ment from random distributions, evolve to
generate rank size relations within which cit-
ies rise and fall through continual locational
change. These models are signicant in that
they demonstrate how long-lasting repetition
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
4/22
POLYNUCLEATED URBAN LANDSCAPES 637
of routine locational processes generates spa-
tial structures which are hard to break, henceresilient. We then
show how our earlier em-
pirical and theoretical measures of persist-
ence based on rank size are also borne out in
these model-based simulations. As a conse-
quence of this argument, the structures we
generate are inevitably polynucleated in a
spatial sense and accord well with more
causal observations of the way cities co-op-
erate, fuse and grow together.
2. The Empirical Evidence
To proceed, we require some formal
denitions appropriate to a simple measureof structure based on
city size, Pi, the popu-
lation in area i. Assuming N cities or areas
which contain population and which exhaust
the space under consideration, then the sim-
plest measure of structure in the distribution
is based on ranking population by size, indescending order where
the rank r of the
largest population is 1. We dene the popu-
lation in area i which has rank r as Pir. Therank
order{Pi1.Pj2.Pk3..Plr..PmN}
thus represents the set of relations between
the areas that dene the settlement structure
while the degree of persistence can be calcu-
lated as some statistic of the difference be-
tween rank orders at two points in time, say
between t and t1 1. Such statistics are
dened on differences between Pir(t) and
Pir(t1 1) where the subscripts t and t1 1 have
been added to the rank order of each popu-lation by area to
distinguish between changes
in rank and population volumes through
time.
Differences in ordering also reect absol-
ute changes in the population of each area,
which implies growth or decline. We calcu-
late the total population at time t as
Pt5
O
N
i5 1Pir(t) (1)
where the summation in (1) is over i or r, for
each area i is uniquely associated with a
single rank r(t) at time t.
In many situations, we are not interested in
the absolute change in populations from one
time-period to another, but in the relative
distribution and thus we dene the relativechange in population
or market share as
Pir(t)5Pir(t)/Pt
Oi pir(t)
51 (2)
We can now calculate a series of simple
differences between the rank-ordered distri-
bution of population at two different points
in time. First, the absolute difference in
population shares for any area i is dened as
C t1 15Oi
|pir(t1 1)2pir(t) | (3)
and this statistic gives a measure of the per-centage shift in
population between any two
time-periods. Another view of this shift is
given by changes in rank order. The average
number of ranks that change in a typical area
between t and t1 1 is given by
K t1 15Oi
| rit1 12 rit|/N (4)
where, rit1 1 is the rank of area i at time t1 1
and rit is the rank of the same area at time t.Note that the sum
of each set of ranks is
Oi
rit1 15Oi
rit5N(N1 1)/2
Lastly, the average shift of rank in (4) can be
expressed as a percentage shift which is
given as
kt1 15K t1 1/N5Oi
| rit1 12 rit| /(N2) (5)
It is possible to have considerable changes in
the percentage shift in populations, Ct5 1. 0,but no changes in
rank, Kt1 15 0, especiallyif the population is concentrating or
dispers-
ing systematically with larger areas growing
and smaller ones declining proportionately
in market share or vice versa. Zero change inmarket share of
course implies no change in
rank from time-period to time-period.To illustrate the degree to
which the settle-
ment pattern changes, we will examine the
distribution of population in Great Britain
(England, Scotland and Wales) at 10-yearly
periods from 1901 to 1991 for N5 458 stan-
dardised administrative areas which cover
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
5/22
MICHAEL BATTY638
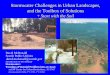
Figure 1. Rank size population distributions in Great Britain,
1901 91.
the entire land area. During this period which
is most of the 20th century, the population
grew from nearly 37 million to 54 million, a
change of some 46 per cent which occurred
mainly in the rst 50 years. This large
change masks the fact that the settlement
structure has remained remarkably stableduring this period.
Because populations are
log-normally distributed (for reasons that we
will elaborate later), we can show this stabil-
ity by plotting the log distribution of popu-
lation and rank in descending order.
We have plotted log[Pir(t)]against log[rit]
for t5 1901, 1911, 1921, , 1991, in Figure
1, and this shows that the shape of the distri-
bution changes very little from decade todecade. If we correlate
every distribution
Pir(t) against each of the others for the 10
different series, the lowest correlation is be-
tween Pir(1901) and Pir(1991) which is 0.79 (ac-
counting for some 0.62 of the variance).
Figure 1 demonstrates remarkable persist-
ence in the settlement system which from
more casual evidence at this scale of aggre-
gation, implies that no new major settlements
have appeared in Great Britain during the
past 100 years. During this period, the largest
settlements appear to have fallen in popu-
lation with the smallest increasing, thus rep-resenting a mild
dispersion of populations.
We can examine the differences implied in
Figure 1 more effectively if we compute the
shift statistics given above in equations (3)
(5) and although we can do this for every
pair of distributions, we choose simply to
concentrate on the differences between 1901
and 1991. In Figure 2, we show the logged
rank size distributions for these years, thistime based on the
relative population shares
pir(1901) and pir(1991) which enable us to remove
the absolute growth effects. We also show
the distribution of the 1991 population or-
dered according to the ranks that the same
areas i had in 1901that is, the distribution
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
6/22
POLYNUCLEATED URBAN LANDSCAPES 639
Figure 2. Rank size and population shifts in Great Britain
between 1901 and 1991.
log[pir(1991)] against log[ri1901]. Although there
are substantial shifts in the populations of the
largest areas, the rank order remains fairly
stable at the upper ends of the distributions
while there is more change at the lower ends.
Over the period, the percentage shift in
population C 1991 has been in the order of 46
per cent, much the same as the rate of
growth. In fact, this reects shifts up or down
which mean that the absolute percentage dif-
ference is half of this, some 23 per cent. Thisis consistent
with the shifts in rank order
measured by K 1991 and k1991. The average
number of ranks that are changed for each
area K 1991 is 86 from 458 and this implies a
percentage rank shift k1991 of almost 19 per
cent. This bears out the fact that during the20th century at
this scale, the settlement pat-
tern has been extremely stable with the pat-
tern established by 1901 dominating changein the following 100
years.
We have been extremely careful so far to
avoid any discussion of the rank size rule
for two reasons. First, as the theory has
developed since Zipf (1949) presented the
rst general treatment, the events that have
been the subject of inquiry have been re-
garded as distinct cities rather than areas
which completely and perhaps arbitrarilysub-divide an entire
territory. We would ar-
gue here that our sub-divisions are not cities
and that rank size and other scaling relations
are as appropriate, if not more so, to arbitrary
disaggregations of any spatial system. Sec-
ondly, most of the work on rank size has
chosen to examine not the entire distribution
of city sizes, but the long tail of the city sizedistribution
which can be approximated by a
power law (see Carroll, 1982). Nevertheless,
it is instructive in this context to examine the
relationship to the mainstream as there is
much commentary on the persistence of city
systems over time which supports the analy-
sis here.
The rank size relation is based on tting a
power law to the long tail of distributionssuch as those shown
in Figures 1 and 2. This
means that there is an arbitrary cut-off
imposed for those areas that do not vary
log-linearly with rank, which are the smallest
settlements. This is itself problematic as it
effectively excludes the origins of urban
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
7/22
MICHAEL BATTY640
Table 1. The rank size relation tted to the 1901 91 population
data
Year t Correlation R2 Intercept Kt P*1t510Kt Slope at
1901 0.879 6.547 3526157.772 2 0.8171911 0.880 6.579 3801260.554
2 0.8101921 0.887 6.604 4025650.857 2 0.812
1931 0.892 6.607 4046932.207 2 0.8021941 0.865 6.532 3410371.276
2 0.7401951 0.869 6.482 3034245.953 2 0.7001961 0.830 6.414
2595897.640 2 0.6511971 0.815 6.322 2101166.738 2 0.6011981 0.816
6.321 2095242.746 2 0.6011991 0.791 6.272 1872348.019 2 0.577
growth. Nevertheless, the typical relation is
based on
Pr5Kr2 a (6)
where, Pr is the population of the area ranked
rwhich is the same as P*r* with the area i and
time t subscripts suppressed; K is a constant
of proportionality and a is a parameter thatcontrols the change
in population between
ranks.
The strong form of the rank size rule
which was argued by Zipf (1949)as well as
Aubach, Lotka, and others before, see Carroll
(1982)supposes that a5 1 which, fromequation (6), means that the
rst-ranked area
is P15K. Then for any rank r
Pr5P1/r (7)
The implications of equation (7) seem rather
articial in that the second-ranked city is half
the size of the rst, the third one-third thesize, the fourth
one-quarter and so on down
the hierarchy. But the empirical evidence is
so strong for many city systems in different
parts of the world, and the persistence of the
relation through time so clear, that Krugman
remarks the regularity is
so exact that I nd it spooky. The picture
gets even spookier when you nd it is not
something new ( Krugman, 1996, p. 40).
There are many problems with this rule.
First, some countries have one dominating
large citythe so-called primate city
which stretches the long tail at its very top.
We have already remarked on the fact that
the short tail of such distributions is effec-
tively excluded. The denition of the discreteevents that
comprise the objects in the distri-
butioncitiesis also in doubt. These are
continually changing in size and area, and
there has been little sensitivity analysis of
how their denition affects the parameters of
the power law. There seems also to be a
tendency for the value of the parameter a in
equation (6) to increase slightly through
time, implying that city systems are concen-trating, with some
of the best evidence for
primacy and increasing concentration devel-
oped for the European system by de Vries
(1979) and for the French urban system by
Pumain (2000) and others in her group such
as Guerin-Pace (1995). To show, however,
that the arbitrary sub-division of the urban
space demonstrates the persistence of the
British urban system, we have tted the scal-ing relation
P*rt5Ktr
2 at
t(or rather its loglin-
ear form: P*rt5 logKt2 at log rt) to the datain Figure 1 and
this yields the parameter
estimates shown in Table 1.
From Table 1, it is clear that the slope
parameter at is much bigger than that whichwould have resulted
had the relation been
tted without the short tail, and that the
system is getting less concentrated throughtime rather than more
concentrated. None of
this detracts from the scaling that is implicit
in the data or the persistence of the system
through time. In fact, although we will not
present the results for tting the truncated
distribution because it is not our purpose to
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
8/22
POLYNUCLEATED URBAN LANDSCAPES 641
justify the rank size rule in this paper, it is
worth noting that the rank size relation fromthese data is
closer to Pr5P1r than theclassic form. This provides another
tantalis-
ing possibility that continues to fuel research
into this intriguing relation.
3. Theoretical Imperatives
Central to change and growth in any system
is positive feedback. At a purely phenomeno-
logical level, if the rate of growth (or de-
cline) is the same everywhere, the system
simply expands (or contracts) uniformly
without any change to its internal organis-
ation. This situation is rare. If the rate ofgrowth varies as a
function of the size of
elements comprising the system, then the
largest elements will grow more than propor-
tionately, eventually dominating the system.
In city systems, such growth implies that the
largest city eventually dominates all the oth-ers; in short, it
is as though the largest city
sucks all the growth away from the other
cities. This kind of situation is also rare, inthat the
resulting steady state is simple and
unchanging, hardly characteristic of the kind
of growth that is implied by the empirical
evidence of the last section.
Arthur (1988) has examined these types of
growth through positive feedback, dening
three distinct cases. First, where the elements
of the system grow in proportion to some
natural advantage, even in the presence of
noise, this natural advantage reinforces itselfthrough positive
feedback. There is no path-
dependence in that any deviations from the
pattern of natural advantage are eventually
removed. Arthurs (1988) second case is
quite the opposite in that growth is based on
chance rather than necessity. Growth occurs
in proportion to what is already there but inthe presence of
noise, and although this pro-
cess settles to a steady state, noise dictatesentirely what this
state will be. The third case
is one where growth depends both on natural
advantage and on economies of scale in that
as a city grows its future growth depends on
what is already there. If one region gets
ahead, then this growth is reinforced and
eventually, the region or city will dominate.
This is akin to the situation where all growthis attracted
towards the biggest city as the
rate of growth is largely a function of the size
of each city.
In the last two cases, the ultimate state of
the system depends on the way random
events or noise dictate its historical evol-
ution, but it is the second case that appears
most realistic. From a random distribution,
some pattern ultimately emerges which is not
based on simply one city asserting itself.
However, Arthur does not deal with cases
where the growth rate itself is random, f or
his model is based on the randomness of
location. Thus a fourth, more persuasive,case might be
considered where growth is in
proportion to size but the rate of growth is
random, thus ensuring that there will be no
ultimate unchanging steady state. To demon-
strate this, we dene population in area i and
time t as Pit where for the moment we sup-press rank r. Then the
change in population
between any two time-periods t and t1 1 is
dened asD
Pit5
Pit1
12
Pit, with the rateDPit/Pit. We are now in a position to
formal-
ise the process of growth.
First, we state that the rate of growth is
random, dened as
DPit
Pit5 e it (8)
where, it is the random rate of growth
associated with area i from time t to t1 1.
Using an appropriate form for equation (8)and integrating from
the initial distribution
Pi0 to the current Pit gives
log(Pit)2 log(Pi0)5Ot
s5 0
e is (9)
The model thus becomes
Pit5Pi0Pt
s5 0
e is (10)
where the change from one time-period to
the next is
Pit1 15 e it Pit (11)
The process implied by equations (10) and
(11) is one of proportionate random growth
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
9/22
MICHAEL BATTY642
where the increments of growth are dis-
tributed lognormally. From any initial distri-bution Pi0 which
may in itself be random (or
uniform), the limit of the process is lognor-
mal. If the growth rates were all the same
that is, there were no randomness and it5 c,
"itthen there would be no redistribution of
activity from the initial distribution, that is,
Pit/Pkt5Pi0/Pk0. Randomness is thus essential
in generating a distribution that is continually
changing.
To show that this model generates distri-
butions that are persistent and similar to
those which have been widely observed for
city systems (as in Figures 1 and 2), we have
run the model in equations (10) and (11) formany iterations,
with parameters that loosely
approximate those of the population of Great
Britain between 1901 and 1991. We have set
the number of areas as N5 458, the total
time of the simulation as T5 1000, and we
have begun the process with a uniform distri-bution Pi05 1/N. We
have run the model for
1000 time-periods which provides a rough
comparator with the settlement history ofBritain from 1000 to
2000. As with the em-
pirical data which we illustrated in Figures 1
and 2, we show the rank size relations pre-
dicted from the proportionate growth model
in Figure 3 for Pir(900) and Pir(1000) against their
respective ranks ri900 and ri1000. We also show
the distribution Pir(1000) against the previous
rank ri900 which is measure of the displace-
ment of ranks over 100 time-periods.
During this period, the shift in populationK1000 is about 22 per
cent which is about halfthe actual shift in the real data for
Great
Britain. The average number of ranks which
are altered during this time is K10005 34which is about 7 per
cent of the total number
N. These gures are less than half those
associated with the real change and this sim-ply implies that we
need to redimension the
time over which the process operates to bringthe simulation
nearer the observed changes
for Great Britain. In fact, it is not the actual
values that are important here but the
congurational nature of the simulated rela-
tions. The forms of the rank size relations
generated in this way are extremely close to
those observed in Figure 2 for Great Britain.
Lognormal distributions do emerge from theinitial uniform
distribution of settlement as
expected and the shift in ranks over 100
time-periods (t5 900 and t5 1000) has a
similar form to that shown in Figure 2. In
fact, comparison of Figures 2 and 3 which
are dimensioned on the same axes, imply that
the observed and simulated distributions are
from the same class.
To impress this similarity even further, we
have tted straight lines to the simulated
rank size relations in Figure 3. The initial
distribution here at t5 1 is uniform and the
variation with respect to rank is thus arbi-
trary. For comparison, however, we haveincluded this in the
estimation which we
show in Table 2. As the total populations are
not comparable in any way with the observed
results, then we have regressed the market-
share equivalents pir(900) and pir(1000) against
their respective ranks. The results are givenin Table 2.
It is worth noting how similar these results
are to those for Great Britain. Although theslope increases
slightly as the simulation
continues between t5 900 and t5 1000, im-
plying a slight increase in concentration, the
size of the slope and the correlations are
consistent with those in Table 1 for the 1901
and 1991 British regressions. This, combined
with the visual consistency between Figures
2 and 3, implies that the law of proportionate
effect which is based on random growth
appears extremely appropriate for explainingthe persistence of
settlement structure and
the way cities or areas can slowly change
their relationships to one another through
temporal growth.
In fact, this model was rst suggested by
Gibrat (1931). Surprisingly, although widely
referenced in the rank size literature, it hasnot been used very
much. A variant due to
Simon (1955) has been recently popularisedby Krugman (1998), and
there was some
considerable discussion in the literature of
the Gibrat Simon model in the 1970s (see
Parr, 1976). More recently, there has been a
reawakening of interest in Zipfs law and
proportionate effect in theoretical physics
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
10/22
POLYNUCLEATED URBAN LANDSCAPES 643
Figure 3. Simulated ranksize and population shifts between t5
900 and t5 1000.
(see Marsili and Zhang, 1998). But the single
most important issue here is the fact that
settlement systems seem to persist over long
periods with few changes in the rank of areas
and that such persistence is due to random
but proportionate growth, negating any econ-
omies of scale that might be associated with
larger cities. This means that over very long
time-spans, this process can change the rank
and size of cities dramatically. Thus the pro-
cess does provide opportunities for radical
change in structure while at the same timeimplying the
persistence of well-established
patterns.
4. Urban Landscapes from the Bottom-up:
Agents, Actions and Interactions
To demonstrate the argument that urban sys-tems evolve spatially
through the incessant
application of weak positive feedback overlong periods of time,
we require models
which meet three criteria. First, the models
must treat activities at as disaggregate a scale
as possible, ideally at the individual scale so
that the greatest possible micro-diversity
occurs consistent with random growth. Sec-
ondly, growth (or decline) must occur
through the routine action of many decisions
slowly building on one another over long
periods of time; while, thirdly, to evolve city
systems where different clusters of cities are
highly interdependentwhich is the modern
mark of polynucleation or network cities
such models must simulate movement be-
tween individuals and the resources they
consume at the micro-level. Agent-based
models of this kind have only recently made
their appearance in the social sciences,largely due to advances
in computation and
data which enable individual objects or
events to be simulated explicitly and, to date,
most applications have been to theoretical
situations (Epstein and Axtell, 1996). Here
we will develop a series of such models
which reect a plausible way of unpacking
the processes that lead to the kinds of persist-
ence and polynucleation representative of thechanges in
settlement patterns that we mea-
sured earlier in an empirically and theoreti-
cally aggregate manner using rank size
relations. Once we demonstrate how these
models work, and what they are able to
produce, we will also show that these models
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
11/22
MICHAEL BATTY644
Table 2. The rank size relation tted to the data from the random
growth model
Year t Correlation R2 Intercept Kt P*1t5 10Kt Slope at
1 1 0 1 0900 0.840 2 1.077 0.083 2 0.777
1000 0.844 2 0.995 0.101 2 0.824
are able to generate persistent polynucleated
structures with similar rank size relations.
Agents A are now dened by the subscript
i and resources R by the subscript k. At the
most basic level, agents move within the
system f rom their origins given by co-ordi-
nates Xi, Yi in search of resources (to keepthem alive!) which
are located at destinations
Xk, Yk. The location of agents as they move to
capture resources is signicant in that their
location at time t is given by A(xit, yit while
resources do not move and hence are xed at
R(Xk, Yk). The resolution at which the spatial
system is represented, and at which move-
ment takes place, is given by a series of
ne-scale cells dened by distances Dx and
Dy, and the movement of any agent i from
time tto t1 1 is always computed in terms of
their co-ordinates as
xit1 15xit1 Dxit1 ex tt
and
yit1 15yit1 Dyit1 eytt (12)
Note that the changes in co-ordinates Dxit and
Dyit as well as the small random errors inmovement xit and yit
are specic to agent i
at time t. The computational mechanics re-
quired to simulate such movement are not
central to this paper, but their details can be
found elsewhere if required (see Batty and
Jiang, 2000).
In essence, the structure we are suggestingis another way of
representing the movement
of individuals from, say, home to work, orany other kind of
trip-making decision, and
the basic model we will begin withwhich
is at the basis of all our subsequent models
can be conceived in these terms. Origins and
destinations do not vary and the dynamics
that are implicit in this basic structure are
those of routine movement. However, be-
cause we are simulating an interaction sys-
tem between cities that evolves through time,
we assume that when new agents enter the
system (through migration or growth), then
they need to learn where the resources are
located. They do this by responding to thesignals that have been
left in the system by
preceding or current agents. These signals
form a landscape of routes or tracks which
we dene as a continuous function W(x ,y).
Now, the movement dynamics for any agentcan be separated into
two phases: rst, in
terms of responding to where resources are
available, which involves learning in some
way about their location; and, secondly, in
terms of their return to origins once resources
have been located, so that the resources
might be consumed in some way. The learn-
ing phase of this dynamic proceeds by agents
moving in direct response to the local gradi-
ent of the landscape which records the local
density of interaction already established by
the behaviour of previous agents. Each agent
works out their local gradient which is given
as
gradW (xi, yi)
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
12/22
POLYNUCLEATED URBAN LANDSCAPES 645
R(Xk, Yk), then it engages with these re-
sources in some way and thence returns to itsorigin using a
different procedure. Agents
remember where they are located at
A(Xi, Yi) and thus x their changes in direc-
tion Dxi and Dyi as function of the origin
location, that is
Dxi5 f(Xi) and Dyi5 f(Yi) (14)
However, once the resources have been dis-
covered, the agent also remembers this lo-
cation. As the agent returns to the origin, it
lays a trail or updates the landscape func-
tion to reect this new knowledge by
W (xit1 1, yi t1 1)5W(xit, yit)1 / (15)
where, the constant / is a pulse reecting
the increased interactivity of the landscape at
this point, thus adding to the attraction of that
location as a signal for future movement.
These models are increasingly popular for
simulating movement where learning is aprerequisite to
establishing stable structures
which emerge from no knowledge of the
landscape whatsoever. They have been de-veloped for simulating
animal populations
such as ants (Resnick, 1994), but are
nding wide use in modelling movement
systems which are too complicated to rep-
resent in formal frameworks such as
telecommunications trafc, travelling sales-
men problems and the like (Bonabeau et al.,
1999). They are also being employed in the
micro-dynamics of trafc simulation, crystal
growth and related problems in physicswhere they are referred to
as active walker
models (Lam and Pochy, 1993). They are
being used to model actual behaviour based
on walking in cities and buildings where they
are forming a new basis for pedestrian mod-
elling (Helbing et al., 2001). In this context,
they are essential in building up spatial struc-tures, from the
beginning of time so to speak,
where the original landscape is uniform withno settlement,
something which is implicit in
the long time-scales adopted by the approach
presented in this paper.
In the rest of this section, we will simply
illustrate the working of the model, noting
that the local dynamics of movement simu-
lated here will eventually be embedded in
broader dynamics where origin and desti-nation activity reect
growth of the system.
Our rst example is based on one origin and
a regular small compact cluster of destina-
tions with all our examples being simulated
on a 2003 200 lattice. We have located 1000
walkers at the centre of this lattice and
located a square area of resources some 80
units distant to the north-east of the origin.
We can display three key patterns from this
model: rst, the actual position of each of the
agents in the space; secondly, all the paths
that the agents have taken so far; and the
landscape function (which represents cumu-
lative laying down of permanent tracks) atany time t. The 1000
walkers rst move out
from the origin in random direction because
the landscape function w(xi, yi) is uniform
everywhere; no resources have yet been
found and thus the pattern of movement
computed from equation (12) is random. Weshow this initial
situation in the top two maps
in Figure 4 where we omit the landscape
function as it is uniform. As agents locate thearea of resources
through this random
Brownianmotion, they then return to the
origin, laying trackswhich, in this case of
one origin and one destination, is a straight
line between the centre of the space and the
square patch of resources. After 200 time-
periods, the agents have covered the entire
space and, although the landscape function is
now quite distinct, there are still many agents
in the space who have not yet discovered theresources. By time
t5 2000, the agents
within space show a denite tendency to
follow the tracks which now dominate both
the pattern of all tracks to date as well as the
landscape function. Figure 4 represents a
clear pattern of spatial learning and, in this
case, the simplest of networks where there isno competition
between nodes.
We now relax the problem by clusteringagents in 10 origin
locations themselves ran-
domly located in the space, and 13 desti-
nation locations. The 1000 agents are
uniformly but randomly assigned to origins.
Destinations, as before, do not have volume
but simply area. We show these data in the
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
13/22
MICHAEL BATTY646
Figure 4. The simplest settlement: one origin, one
destination.
top row of Figure 5 which also illustrates the
evolution of the structure over 5000 time-pe-
riods. In this simulation, because the agents
have greater opportunities for discovering re-
sourcesthe densities are higher and the
locations more variedby t5 50, tracks arebeing marked out on the
landscape even
though the entire space has not yet been
explored. By t5 500, the nodal structure
essentially the main links between origins
and destinationsis being stamped out in the
landscape and, by t5 5000, the structure is
extremely clear with most of the agents mov-
ing on the main links in the system.
What is interesting about these simulations
is how the transport structure becomes struc-
tured through random discovery with the
densest links in the central part of the spaceand links between
any origin and destination
reecting distance in a simple way. In fact,
competition between nodes is clearly evident
in this structure with nodes and links that get
ahead faster in the process clearly retaining
this superiority. The pattern which is marked
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
14/22
POLYNUCLEATED URBAN LANDSCAPES 647
Figure 5. Emergence of interactions between clusters of origins
and destinations.
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
15/22
MICHAEL BATTY648
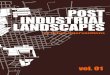
Figure 6. Settlement and interaction based on randomly located
agents.
out by this system is polynucleated of course,
but is largely fashioned by the assumptions
made about xed origins and destinations.
We should also note that once an agent nds
a resource, the resource is consumed with a
given probability ensuring that agents are
able to exercise choice in their acquisition.
Our last example relaxes the effect of prior
structure. In Figure 6, we show the simu-
lation where the original distribution of
agents is entirely random but where there are
a small xed number of resource locations
which dominate the structure. The structure
which eventually emerges by t55000, repre-
sents the simplest star-shaped patterns of in-
teraction around resources. In fact, what
happens in this simulation is that the tracks
gradually begin to reduce in number as trackscompete against
each other. For example, as
a track in the landscape begins to build up, it
attracts walkers from other tracks and thus
nearby tracks which run almost parallel be-
gin to compete for walkers. This process is
entirely conditioned by the degree of ran-
domness in path selection as reected in
equations (12) and (14). Although this is not
the clearest of examples, these effects doreveal that, even at
this level in terms of
these models, history matters in that if one
location gets ahead, it tends to keep this
advantage through positive feedback. The
structure thus persists but it is held in a
precarious balance in that, over the much
longer term, such feedbacks can gradually
decay in their impact.
5. Evolving Polynucleated Urban Struc-
tures
So far, our origins and destinations have
been xed, there has been no growth, and allwe have shown is the
way positive feedback
enables interactions to be established be-
tween these xed activities. We can now
relax the model and embed the movement
dynamics within a wider process of urban
dynamics which enables new agents and new
resources to be located while retaining the
learning capabilities of the interaction behav-
iour. In our models, we will assume a uni-
form growth process, locating one new agentat each time-period,
introducing two possi-
bilities: rst, we will simply locate new
agents keeping the initial distribution of re-
sources xed; secondly, we will introduce
both new agents and new resources which
the agents generate, but again keeping the
growth process uniform. We could generatechanges to the location
of agents through
internal movement of these locations in re-sponse to how the
system is developingin
much the same way, for example, as agricul-
tural populations were attracted to the grow-
ing cities during the industrial revolution.
However, we prefer here to generate new
agents by locating them with respect to some
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
16/22
POLYNUCLEATED URBAN LANDSCAPES 649
measured structure of the system, based on
some potential P(x, y, t) which reects the
spatial distribution of the agents so far and
which, like the landscape function introduced
above, responds to changes in new agent
location as a positive feedback.
We dene this potential function as
P(x, y, t1 1)5P(x, y, t)1 h=2 P(x, y, t)1
o(x, y, t)1 e(x, y, t) (16)
where, the diffusion term and its coefcient h
represent the gradual spreading of the poten-tial through time;
the term o(x, y, t) repre-sents the additive effect on the
potential of
one agent locating in each time-period; and
(x, y, t) is an error term that enables a de-
gree of diversity to be introduced in the
process.
Note that, although potential is computed
for every point or cell in the space at eachtime, only one
location is associated with a
new agent o(x, y, t). The extent to whichpotential is reinforced
through the continuedapplication of equation (16), depends on
the
balance of forces within the equation. Inthese simulations, the
effect of the error term
is substantial and this is dimensioned so that
current local potential is most important but
that distant places from the current highest
levels of potential can always grow throughsuch errors being
reinforced. Once potential
is computed in this way, the location of a
new agent i at co-ordinates Xit1 1,Yit1 1, is
based on identifying the maximum value of
equation (16). That is,
Xit1 1 , Yit1 15maxxy
{P(x, y, t1 1)} (17)
and thence the variable o(x, y, t) is set as aunit increment for
the location Xi,Yi which
drives the function in equation (16).In Figure 7, we show the
evolution of a
spatial system to t5 2000 using this model.We randomly locate
some 6 initial resource
locations but, from then on, we use equations(16) and (17) to
locate the agent population.
From this simulation, we see that several
clusters of population grow up, not adjacent
by any means to the initial resource loca-
tions. Although we do not show this, these
clusters do not grow uniformlythat is, they
do not emerge together. There is a complex
dynamics initiated by this process which is
reected in the interaction maps as well as
the polynucleations which result. The poten-
tial from equation (16) is also shown in
Figure 7 which reveals a diverse picture of
change in that there are locations with com-paratively high
potential at time t5 2000
which have not yet had a chance to establish
their claim for the location of new agent
populations. It is the micro-diversity of this
potential surface that ensures competition be-
tween clusters of settlement within the sys-
tem.
We can now describe a much fuller ver-
sion of this model where we add the locationof new resources
through time. Assuming
that our agents are populations and our re-
sources employment activities, we argue that
one new employment activity generates three
units of population and that the units of
employment activity are industrial and ser-
vice in their orientation. This is a long-stand-
ing distinction in urban systems and all it
means is that industrial activities are more
likely to be generated from other industrialactivities, while
service activities are more
orientated to populations. Here, this implies
that the initial resource locations tend to
generate industrial resources more than
population or services. These relationships
are casually built into the model in terms of
the weighting of potential for new agents and
resources.
The potential function in equation (16)above can now be extended
and generalised
with respect to the new activities and theirrelationships in the
following way:
P(x, y, t1 1)5P(x, y, t)1 hP=2 P(x, y, t)1
Oi
oi(x, y, t)1 eP(x, y, t)
I(x, y, t1 1)5I(x, y, t)1 hI=2I(x, y, t)1
Oioi(x, y, t)1 eI(x, y, t)
S(x, y,t1 1)5 S(x, y, t)1 hS=2 S(x, y, t)1
Oi
oi(x, y, t)1 eS(x, y, t) (18)
The structure of the equations in (18) is
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
17/22
MICHAEL BATTY650
Figure 7. The emergence of polynucleated clusters of agents.
similar to the single potential for agents or
populations in equation (16) except that the
sum of objects oi(x, y, t) over i is meant toreect a sum of both
new agents and new
resources. The parameters of diffusion and
the error terms are of course specic to thepotential involved.
Finally, we should note
that the initial levels of potential are ran-
domly distributed. New activitiespopu-
lation P(xit, yit), industry I(xit, yit), and
services S(xit, yit)are then located in cells of
maximum potential from equation (18) ac-
cording to the previous logic in equation(17).
We have run this model up to t5 2000,and we show these
simulations in Figure 8.
In this model, there are many outputs that we
can examine, but here we will concentrate
rst on the patterns of population that are
produced. It is quite clear that these patterns
do not bear much resemblance to the initial
distribution of resources. Moreover, it is also
clear that new spatial clusters emerge
throughout the process, thus ensuring that no
particular cluster becomes singly dominant.
This is, of course, the typical signature of a
polynucleated urban landscape. In Figure 8,we also show the
pattern of transport routes
which indicates how the earlier clusters have
more intensive interaction than the later clus-
ters. In fact, as new resources begin to domi-
nate the initial distribution, the initial pattern
of resources is soon wiped out. As new
resources depend on new populations andvice versa, the
structures that emerge are in
fact highly consistent with those that are seenin real city
systems such as in the north
eastern seaboard of the US, in the Randstad
or in the north-west of England. We also
show here the potential for the service re-
sources after 100 time-periods of the simu-
lation, and thence after 2000. From an initial
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
18/22
POLYNUCLEATED URBAN LANDSCAPES 651
Figure 8. The emergence of the polynucleated urban
landscape.
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
19/22
MICHAEL BATTY652
pattern which is highly correlated with the
early population clusters, the potential gradu-ally diffuses. In
this paper, we are not going to
dwell on the mechanics of tting hypothetical
simulation models such as these. Sufce it to
say that even with the very small number of
parameters that these models use, there are still
considerable variations in the outputs that can
be generated. However, in the case of the
potentials critical to the models growth
dynamics, it is likely that the errors rates need
to be higher than those we have used to reect
greater micro-diversity. However, even with
those used, the spatial structures which emerge
clearly represent strong tendencies towards
polynucleation.
6. The Simulated Evidence
It is a straightforward matter to compute
rank size relations from the urban develop-ment patterns
produced by the full model as
shown in Figure 8. However, the model only
produces uniform densities in each cell, and asthe space lls up,
rank size relations will
inevitably atten in their long tails. What we
have done is to take the scanned patterns
captured on 4003 400 grids and to aggregate
these to 203 20 grids from which counts of
the occupied cells are made. We have excluded
all those cells which have zero occupancy.
Although the total possible lled cells is
400 (which compares with the previous em-
pirical data for Great Britain and the aggregatetheoretical
model), only a subset of these
have activity which rises from N5 88 at
t5100 to N5 282 at t5 2000. The rank size
relations are shown in Figure 9. These
are much less smooth than the previous
empirical and theoretical aggregates which is
due to the somewhat coarse nature of thespatial simulations.
However, they reveal clear
evidence of scaling, similar to that shownearlier in Figures 1
3. The relations shown in
Figure 9 are based on the 7 patterns shown in
Figure 8 for t5 100, 200, 500, 900, 1000, 1900
and 2000.
The scaling relations appear similar through
time, notwithstanding the gradual attening
of these curves. In fact, relations are near
pure rank size to begin with but, as thesimulation proceeds,
they become progres-
sively like those observed in reality (Figures 1
and 2). To gauge this, we have tted the
rank size equation from (6) to the data at
these time-periods and Table 3 presents these
results. Strictly speaking, we should only
t these relations to the long tail of the
distributions in Figure 9, but it is still clear that
the slopes are higher than those of the
empirical and theoretical aggregate models.
However, although the slope increases slightly
at rst, it then decreases through time, without
any signicance in terms of increasing or
decreasing the concentration of settlementclusters.
To test the changes between time-
periodsa better test of the stability of the
systemwe have computed the percentage
shifts in population shares given by C 2000 and
the shifts in rank order K 2000 and k2000. We havecomputed these
between t5 1900 and
t5 2000, although this period is probably too
small. This is thus only indicative of the sortsof shift that
are taking place in this model as
well as in real cities and in the theoretically
aggregate model. The percentage shift C 2000 is
of the order of 8 per cent which is much smaller
than that given by the British data and the
aggregate model. This is reected too in the
average rank shift K 2000 which is 33 out of 282,
with a percentage rank shift k2000 of 12 per cent.
We have plotted the t5 1900 and t5 2000
logged distributions of pir(1900) and pir(2000)against their log
of rank in Figure 10 where we
also show log(pir(2000)) against log(rir(1900)) to
show the shifts in rank. In fact, although the
shift in rank is similar to that for the aggregate
model given previously, the nature of the shift
is different with less numbers of aggregated
cells changing much more than in the previousanalyses.
Nevertheless, what this analysis doesshow is that the spatial
disaggregate model
produces rank size relations which are con-
sistent with our earlier examples and that,
with some redimensioning of the temporal
process over which these changes are com-
puted, both models in this paper are producing
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
20/22
POLYNUCLEATED URBAN LANDSCAPES 653
Figure 9. Rank size distributions from t5 100 to t5 2000 for the
agent-based model.
Table 3. The rank size relation tted to the agent-based
simulation data
Period t Correlation R2 Intercept Kt P*1t5 10Kt Slope at
100 0.962 2.508 322.474 2 1.033200 0.952 3.325 989.708 2
1.195500 0.887 3.324 2113.321 2 1.222900 0.888 3.590 3892.044 2
1.256
1000 0.869 3.643 4399.487 2 1.2561900 0.804 3.757 5721.635 2
1.1852000 0.799 3.798 6278.507 2 1.197
similar results which bear out the empirical
analysis.
7. Next Steps
Plausible though the models in this papermight appear, they are
only one variety from
several new approaches which appear prom-ising in the analysis
of the evolving spatial
structure of city systems. The notion that
cities exist at a critical threshold which they
maintain through growth and redistribution is
also one which is consistent with persistent
urban structures. Work along these lines has
shown that cities can grow and change rad-
ically in terms of their densities but, at the
same time, remain within strong limits (Bak,
1996). Batty and Xie (1999) explain how
cities continually readjust their form to a
supercritical level, lling their geometric
space in the same way they have done for
decades. For cities to make the transition toother spatial
forms, there have to be radical
changes in technology and/or behaviour and
it would appear that, in contemporary times,
this might only come if people were radically
to change their patterns of movement. We
have not explored the extent to which these
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
21/22
MICHAEL BATTY654
Figure 10. Simulated rank size and population shifts between
t51900 and t52000.
models keep within critical limits, although
casual observation of the forms that they
generate suggest that they do.
At one level, the evidence for persistent
urban structures that we have presented here,
and the kinds of polynucleated urban land-
scapes that emerge over centuries and mil-
lennia, are obvious. It is easier to build and
replace on what has gone before than to
strike out anew. In this very denite sense,
history matters. But, at another level, thiskind of persistence
is harder to explain and
simulate than new activities. Weak positive
feedbacks are more difcult to pin down than
the stronger forces that continually impress
economies of scale. In fact, persistence may
be due more to interactions in the economy
than to building on and around what already
exists, in that individuals can adjust their
interaction patterns quite dramatically with-out changing the
spatial structures in which
those patterns exist. These are ideas for the
future but all the elements for their develop-
ment are contained in the approach which we
have chosen to pursue here. It could also be
remarked that the approach here is too phys-
icalistalthough once very long-term dy-
namics are invoked, physical competition
between cities provides an implicit economicdynamics which
generates plausible spatial
structures. What these dynamics also show is
that polynucleated spatial structures are more
likely to be the rule rather than the exception.
Moreover, the edge city phenomenon is but
one variety of node in a sea of development
which is continually restructuring and chang-
ing.Finally, this paper has presented a some-
what unusual exercise in analytical mod-
elling. In fact, we have presented two
different types of modelone aggregate
based on random proportionate growth where
the spatial characteristics of the system are
completely absent, and the second a spatially
disaggregate version which we argue con-
tains the same kind of weak growth mecha-nisms that characterise
the aggregate model.
Both these models generate persistent struc-
tures which are similar to those found in real
city systems, while the spatial model sug-
gests that the usual form of such growth is
likely to be polynucleated. There is much
by guest on December 14, 2011usj.sagepub.comDownloaded from
http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/http://usj.sagepub.com/
-
7/28/2019 Polynucleated Urban Landscapes (Batty 2001)
22/22
POLYNUCLEATED URBAN LANDSCAPES 655
work to do on this approach in that our mix
of the empirical and theoretical at different
scales and levels enables us to capture the
kind of diversity that is characteristic of cit-
ies and that we have found hard to deal with
hitherto. In future work, we will take these
ideas further, linking interaction to locationthrough explicit
feedbacks and dimensioning
the growth levels and time-paths of our
theoretical models more appropriately than
we have been able to do here.
References
ARTHUR, W. B. (1988) Urban systems and histori-cal path
dependence, in: J. H. AUSUBEL and R.HERMAN (Eds) Cities and Their
Vital Systems,
Infrastructure: Past, Present and Future,pp. 8597. Washington,
DC: National Acad-emy Press.
BAK, P. (1996) How Nature Works: The Scienceof Self-organized
Criticality. New York:Springer-Copernicus.
BATTEN, D. F. (1995) Network cities: creativeurban
agglomerations for the 21st century, Ur-ban Studies, 32, pp. 313
327.
BATTY, M. (1998) Urban evolution on the desk-top: simulation
using extended cellular au-tomata, Environment and Planning A,
30,pp. 1943 1967.
BATTY, M. and HOWES, D. (1996) Exploring ur-ban development
dynamics through visualisa-tion and animation, in: D. PARKER
(Ed.)
Innovations in GIS 3, pp. 143 155. London:Taylor and
Francis.
BATTY, M. and JIANG, B. (2000) Multi-agentsimulation:
computational space time dynam-
ics in GIS, in: P. ATKINSON and D. MARTIN(Eds) GIS and
Geocomputation , pp. 55 71.London: Taylor and Francis.
BATTY, M . a n d XIE, Y. (1999) Self-organizedcriticality and
urban development, Discrete Dy-namics in Nature and Society, 3, pp.
109 124.
BONABEAU, E., DORIGO, M. and THERAULAZ, G.(1999) Swarm
Intelligence: From Natural toArticial Systems. New York: Oxford
Univer-sity Press.
CARROLL, G. R. (1982) National city-size distribu-
tions: what do we know after 67 years ofresearch?, Progress in
Human Geography, 6,pp. 1 43
EPSTEIN, J. and AXTELL, R. (1996) GrowingArticial Societies.
Cambridge, MA: BradfordBooks/MIT Press.
GARREAU, J. (1991) Edge Cities: Life on the NewFrontier. New
York: Doubleday Books.
GIBRAT, R. (1931) Les Inegalites Economiques.Paris: Sirey.
GUERIN-PACE, F. (1995) Rank size distributionand the process of
urban growth, Urban Stud-ies, 32, pp. 551 562.
HELBING, D., MOLNAR, P., FARKAS, I. J. and BO-LAY, K. (2001)
Self-organizing pedestrianmovement, Environment and Planning B,
28,(forthcoming).
HOHENBERG, P. M. and LEES, L. M. (1985) TheMaking of Urban
Europe: 10001950. Cam-bridge, MA: Harvard University Press.
HOLMES, G. (1992) Preface, in: G. HOLMES (Ed.)
The Oxford History of Medieval Europe. Ox-ford: Oxford
University Press.KRUGMAN, P. (1996) The Self-organizing Econ-
omy. Cambridge, MA: Blackwell Publishers,Inc.
KRUGMAN, P. (1998) How the economy organizesitself in space: a
survey of the new economicgeography, in: W. B. ARTHUR, S. N.
DURLAUFand D. A. LANE (Eds) The Economy as an
Evolving Complex System II, pp. 239 262.Reading, MA:
Addison-Wesley.
LAM, L . a n d POCHY, R. (1993) Active-walkermodels: growth and
form in nonequilibriumsystems, Computers in Physics, 7, pp. 534
541.
MARSILI, M. and ZHANG, Y. C. (1998) Interactingindividuals
leading to Zipfs law, Physical Re-view Letters, 80, pp. 2741
2744.
PARR, J. B. (1976) A class of deviations fromranksize
regularity: three interpretations, Re-gional Studies, 10, pp. 285
292.
PUMAIN, D. (2000) An evolutionary model ofurban systems, in: I.
IANOS, D. PUMAIN and J.B. RACINE (Eds) Integrated Urban Systems
and
Sustainability of Urban Life, pp. 11 33. Bu-curesti: Editura
Tehnica.
RESNICK, M. (1994) Turtles, Termites and TrafcJams. Cambridge,
MA: Bradford Books/MITPress.
SIMON, H. A. (1955) On a class of skew distri-bution functions,
Biometrika, 42, pp. 425 440.
VRIES, J. DE (1979) Patterns of urbanization inpre-industrial
Europe, 1500 1800, in: H.SCHMAL (Ed.) Patterns of Urbanisation
since1500, pp. 79 109. London: Croom Helm.
ZIPF, G. K. (1949) Human Behavior and thePrinciple of Least
Effort. Cambridge, MA: Ad-dison-Wesley.