Embed Size (px)
Citation preview
27.09.2011
1
Model Based Design of a Vehicle-Trailer
Combination Stabilization
12th International Workshop on Research and Education in Mechatronics
September 15th – 16th 2011, Kocaeli, Turkey
F. Quantmeyer, M.Eng.
Prof. Dr.-Ing. X. Liu-Henke
Overview
1. Introduction
2. Virtual Testbed for Model Based Design and Testing
3. Vehicle-Trailer Combinations
4. Modeling of the Vehicle-Trailer Combination
5. Analysis of the dynamical behavior
6. Model Based Design of Vehicle-Trailer Combination Stabilization
7. Conclusion
REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization 2
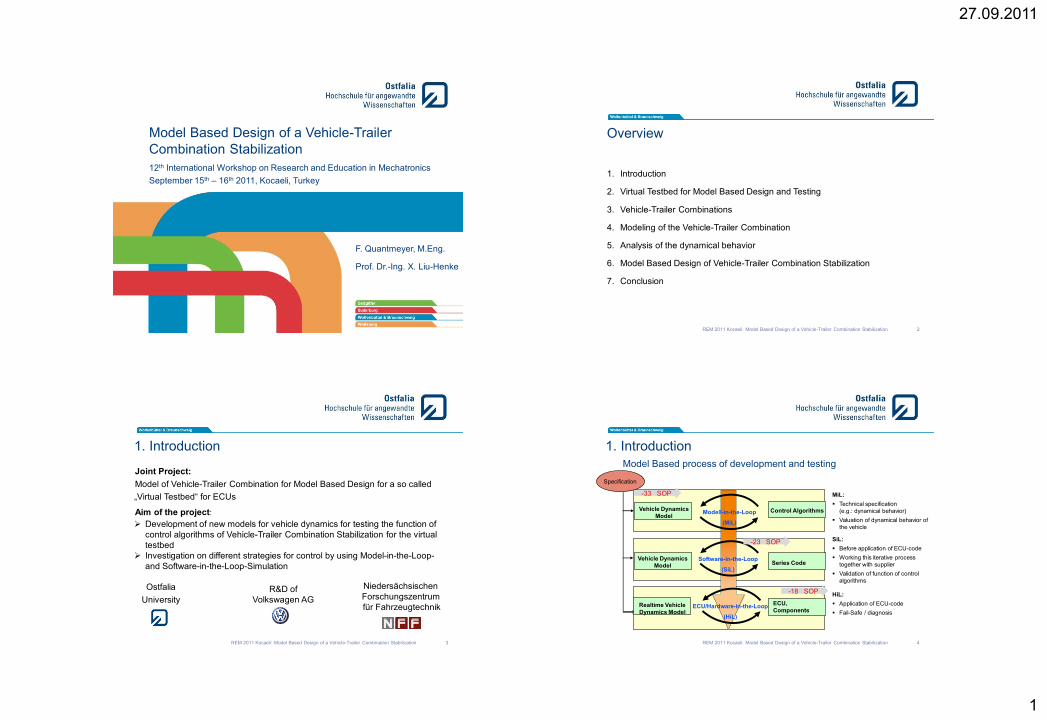
Joint Project:
Model of Vehicle-Trailer Combination for Model Based Design for a so called
„Virtual Testbed“ for ECUs
Aim of the project:
Development of new models for vehicle dynamics for testing the function of
control algorithms of Vehicle-Trailer Combination Stabilization for the virtual
testbed
Investigation on different strategies for control by using Model-in-the-Loop-
and Software-in-the-Loop-Simulation
1. Introduction
3
R&D of
Volkswagen AG
Niedersächsischen
Forschungszentrum
für Fahrzeugtechnik
Ostfalia
University
REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization
MiL:
Technical specification
(e.g.: dynamical behavior)
Valuation of dynamical behavior of
the vehicle
SiL:
Before application of ECU-code
Working this iterative process
together with supplier
Validation of function of control
algorithms
HiL:
Application of ECU-code
Fail-Safe / diagnosis
1. Introduction
Model Based process of development and testing
4 REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization
Modell-in-the-Loop
(MiL)
Control Algorithms Vehicle Dynamics
Model
ECU/Hardware-in-the-Loop
(HiL)
ECU,
Components Realtime Vehicle
Dynamics Model
Software-in-the-Loop
(SiL) Series Code
Specification
-33 SOP
-23 SOP
-18 SOP
Vehicle Dynamics
Model
27.09.2011
2
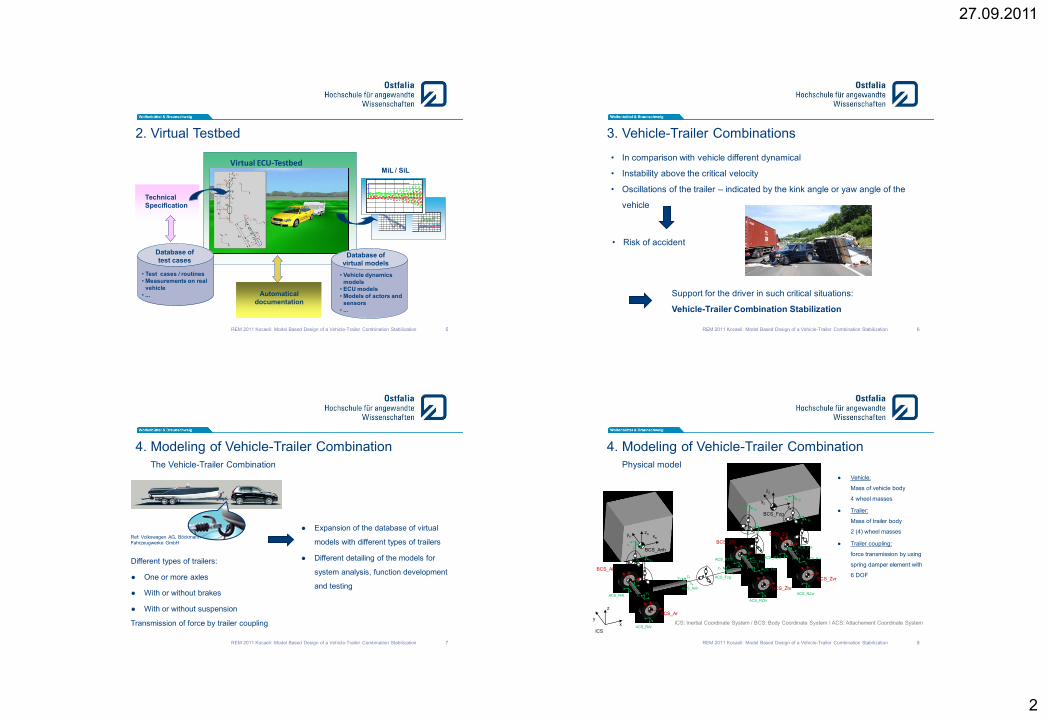
2. Virtual Testbed
Virtual ECU-Testbed
Automatical
documentation
MiL / SiL
Technical
Specification
• Test cases / routines
• Measurements on real
vehicle
• ...
Database of
test cases
• Vehicle dynamics
models
• ECU models
• Models of actors and
sensors
• ...
Database of
virtual models
5 REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization
3. Vehicle-Trailer Combinations
6
• In comparison with vehicle different dynamical
• Instability above the critical velocity
• Oscillations of the trailer – indicated by the kink angle or yaw angle of the
vehicle
• Risk of accident
Support for the driver in such critical situations:
Vehicle-Trailer Combination Stabilization
REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization
4. Modeling of Vehicle-Trailer Combination
The Vehicle-Trailer Combination
Different types of trailers:
● One or more axles
● With or without brakes
● With or without suspension
Ref: Volkswagen AG, Böckmann
Fahrzeugwerke GmbH
7
● Expansion of the database of virtual
models with different types of trailers
● Different detailing of the models for
system analysis, function development
and testing
Transmission of force by trailer coupling
REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization
4. Modeling of Vehicle-Trailer Combination
Physical model
8
● Vehicle:
Mass of vehicle body
4 wheel masses
● Trailer:
Mass of trailer body
2 (4) wheel masses
● Trailer coupling:
force transmission by using
spring damper element with
6 DOF
ICS: Inertial Coordinate System / BCS: Body Coordinate System / ACS: Attachement Coordinate System
BCS_Fzg
BCS_Anh
xa
za ya
yz
zz
ACS_Anh
ACS_Fzg
ACS_RZhr
ACS_RZvr
ACS_RZvl
ACS_RAr
ACS_RAl
BCS_Zvr
BCS_Zhl
BCS_Zhr
BCS_Ar
BCS_Al
xa
za ya
yz zz
xz
za
ya xa
za ya
zf
yf xf
zf yf
xf
xz
zf
yf xf
BCS_Zvl
ACS_RZhl
zf yf xf
zf yf
xf
zf yf
xf
ACS_Fhr
ACS_Fvr
ACS_Fvl
ACS_Fhl
za
ya xa
zf
yf xf
zf
yf xf
za ya
ICS
y
z
x
REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization
27.09.2011
3
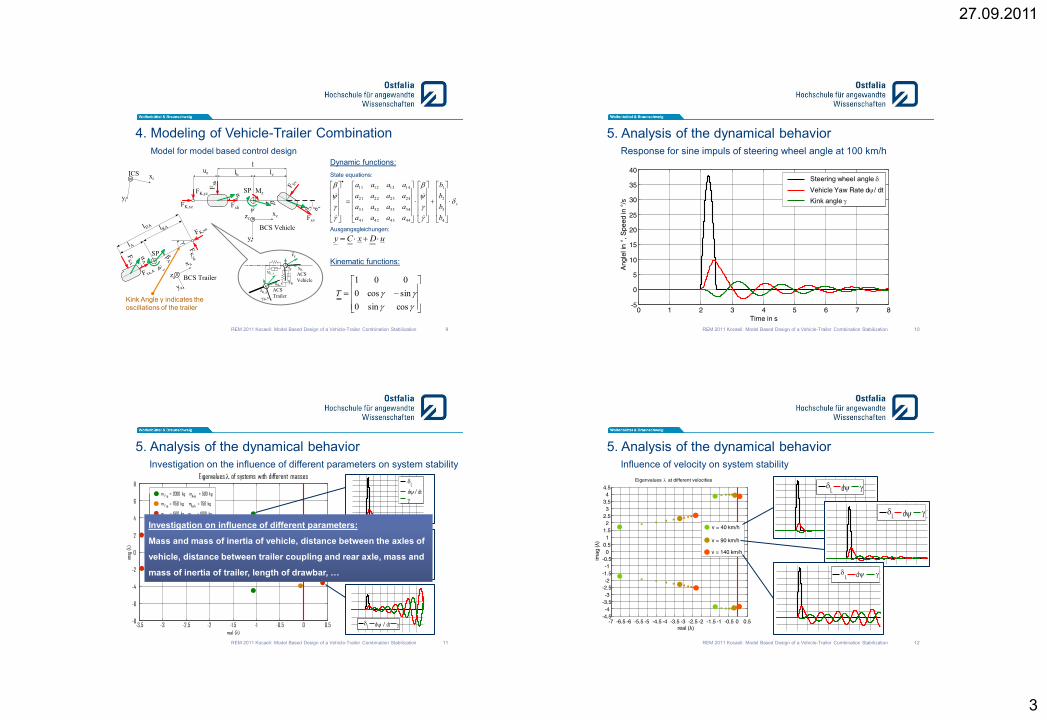
4. Modeling of Vehicle-Trailer Combination
Model for model based control design
9
Kinematic functions:
cossin0
sincos0
001
T
Fxv
FS
h
lv lh ue
l
FK,yz
FK,xz
SP
Fxh
Mz
SP
A
BCS Trailer
BCS Vehicle
xi
yi
ICS
xz
yz
zz
za
K v r
A K v ,
r ACS
Vehicle
ACS
Trailer
Dynamic functions:
v
b
b
b
b
aaaa
aaaa
aaaa
aaaa
4
3
2
1
44434241
34333231
24232221
14131211
uDxCy
State equations:
Ausgangsgleichungen:
Kink Angle γ indicates the
oscillations of the trailer
REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization
5. Analysis of the dynamical behavior
Response for sine impuls of steering wheel angle at 100 km/h
10
0 1 2 3 4 5 6 7 8 -5
0
5
10
15
20
25
30
35
40
Time in s
An
gle
l in
°,
Sp
ee
d in
°/s
Steering wheel angle
Vehicle Yaw Rate d / dt
Kink angle
REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization
5. Analysis of the dynamical behavior
Investigation on the influence of different parameters on system stability
11
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 -8
-6
-4
-2
0
2
4
6
8
real ( l )
imag
( l )
Eigenvalues l of systems with different masses
m Fzg
= 2000 kg m Anh
= 500 kg
m Fzg
= 1750 kg m Anh
= 750 kg
m Fzg
= 1500 kg m Anh
= 1000 kg
L
d / dt
L
d
/ dt
L d / dt
Investigation on influence of different parameters:
Mass and mass of inertia of vehicle, distance between the axles of
vehicle, distance between trailer coupling and rear axle, mass and
mass of inertia of trailer, length of drawbar, …
Investigation on influence of different parameters:
Mass and mass of inertia of vehicle, distance between the axles of
vehicle, distance between trailer coupling and rear axle, mass and
mass of inertia of trailer, length of drawbar, …
REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization 12
5. Analysis of the dynamical behavior
Influence of velocity on system stability
-7 -6.5 -6 -5.5 -5 -4.5 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 -4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
real (λ)
ima
g (
λ)
Eigenvalues l at different velocities
v = 40 km/h
v = 90 km/h
v = 140 km/h
L d
L d
L d
REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization
27.09.2011
4
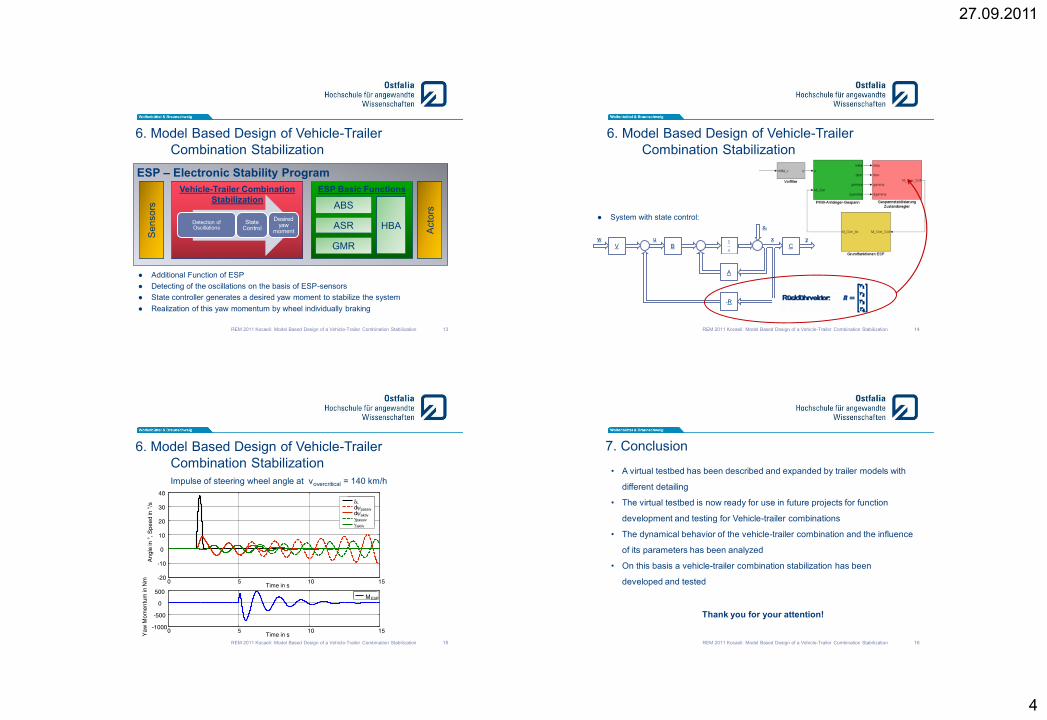
6. Model Based Design of Vehicle-Trailer
Combination Stabilization
13
● Additional Function of ESP
● Detecting of the oscillations on the basis of ESP-sensors
● State controller generates a desired yaw moment to stabilize the system
● Realization of this yaw momentum by wheel individually braking
ESP – Electronic Stability Program
Se
nso
rs
Se
nso
rs
Vehicle-Trailer Combination
Stabilization
Vehicle-Trailer Combination
Stabilization
Detection of Oscillations
State Control
Desired yaw
moment
ESP Basic Functions ESP Basic Functions
ABS ABS
ASR ASR
GMR GMR
HBA HBA
Acto
rs
Acto
rs
REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization 14
V B C
A
-R
x0
x y u w
● System with state control:
REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization
6. Model Based Design of Vehicle-Trailer
Combination Stabilization
15
0 5 10 15 -20
-10
0
10
20
30
40
Time in s
An
gle
in °
, S
pe
ed
in °
/s
0 5 10 15 -1000
-500
0
500
Time in s Ya
w M
om
en
tum
in
Nm
M ESP
L
d passiv
d
aktiv
passiv
aktiv
REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization
6. Model Based Design of Vehicle-Trailer
Combination Stabilization
Impulse of steering wheel angle at vovercritical = 140 km/h
7. Conclusion
16
• A virtual testbed has been described and expanded by trailer models with
different detailing
• The virtual testbed is now ready for use in future projects for function
development and testing for Vehicle-trailer combinations
• The dynamical behavior of the vehicle-trailer combination and the influence
of its parameters has been analyzed
• On this basis a vehicle-trailer combination stabilization has been
developed and tested
REM 2011 Kocaeli: Model Based Design of a Vehicle-Trailer Combination Stabilization
Thank you for your attention!





























