Embed Size (px)
Citation preview

PROCEEDINGS OF THE LADC-‐GEMM
2017 GULF OF MEXICO EXPERIMENT
JUNE 08 – JUNE 17, 2017
R/V PELICAN CRUISE PE17-‐23 COCODRIE TO COCODRIE

SCIENCE AND TECHNICAL STAFF
NATALIA SIDOROVSKAIA JESSE ACHTENBERG STUART CHANCE DAVID COMEAUX
MATTHEW FIRNENO DANIELLE GREENHOW
SEAN GRIFFIN ALEXANDRIA HAHN SARA HEIMLICH BRADLEY LINGSCH GARRETT MARZOLF CHRIS PIERPOINT CARL RICHTER LORENZO SCALA AMY WHITT
26 JUNE 2017

PROCEEDINGS OF THE LADC-‐GEMM 2017 GULF OF MEXICO EXPERIMENT
AUTHORSHIP
NATALIA SIDOROVSKAIA DAVID COMEAUX
DANIELLE GREENHOW SEAN GRIFFIN SARA HEIMLICH CHRIS PIERPOINT CARL RICHTER LORENZO SCALA
PHOTOGRAPHY CARL RICHTER
PUBLICATION COORDINATOR
CARL RICHTER
PUBLICATION DATE 26 JUNE 2017

ACKNOWLEDGMENTS The 2017 LADC-‐GEMM Gulf of Mexico Experiment was funded by a grant from the
Gulf of Mexico Research Initiative. We thank the many individuals involved in the planning and execution of this challenging research expedition. In particular, we thank the ship’s captain and crew for getting us safely to and from the deployment sites and for help with the deployments and for collecting the data that are the basis for the report. We list all participants of the LADC-‐GEMM expedition below and acknowledge them for their hard work and contributions that made this volume possible (Plate 1).
SHIPBOARD PERSONNEL
Science and Technical Staff 1 SIDOROVSKAIA, Natalia Chief Scientist 2 ACHTENBERG, Jesse Videographer 3 CHANCE, Stewart Unmanned Surface Vehicle Operator 4 COMEAUX, David Lead Unmanned Surface Vehicle Operator 5 FIRNENO, Matthew Marine Mammal Observer 6 GREENHOW, Danielle Marine Mammal Observer 7 GRIFFIN, Sean Chief Engineer 8 HAHN, Alexandria Marine Mammal Observer 9 HEIMLICH, Sara Glider Operator, Marine Mammal Observer 10 LINGSCH, Bradley Environmental Acoustic Recording Systems 11 MARZOLF, Garrett Unmanned Surface Vehicle Operator 12 PIERPOINT, Chris Lead, Real-time Passive Acoustic Monitoring 13 RICHTER, Carl Oceanographic Data, Editor, Photography 14 SCALA, Lorenzo Real-time Passive Acoustic Monitoring 15 WHITT, Amy Lead Marine Mammal Observer
LUMCON Shipboard Staff 1 GRAVEL, Erik Captain 2 CAZAYOUX, Ethan Deckhand 3 HAMILTON, Jerome Cook 4 LACROSS, John Marine Technician 5 LEBOUF, Skyler Assistant Engineer 6 TURLINGTON, Ross 1st Mate 7 REDMAN, Rodney Chief Engineer

Plate 1. Photograph of LADC-‐GEMM 2017 Gulf Expedition shipboard personnel (photo: Jesse Achtenberg). Back row (left-‐right): Danielle Greenhow, Sara Heimlich, Alex Hahn, Lorenzo Scala, Natalia Sidorovskaia, Carl Richter, Ross Turlington, Chris Pierpoint; Middle row standing: David Comeaux; Front row (left-‐right): Sean
Griffin, Amy Whitt, Erik Gravel, Skyler Lebouf, Ethan Cazayoux.

i
Table of Contents
1. Introduction .......................................................................................................................... 1.-‐1 2. Methods ................................................................................................................................ 2.-‐1 2.1 Authorship ........................................................................................................................... 2.-‐1 2.2 Overview .............................................................................................................................. 2.-‐1 2.3 Unmanned Surface Vehicle/Towed PAM survey ................................................................. 2.-‐2 2.4 Environmental Acoustic Recording System (EARS) Buoys ................................................... 2.-‐7 2.5 Glider ................................................................................................................................. 2.-‐10 2.6 Visual Observations ........................................................................................................... 2.-‐11 2.7 Oceanographic Measurements ......................................................................................... 2.-‐12 2.8 R/V Pelican Underway Data ............................................................................................... 2.-‐15 2.9 References ......................................................................................................................... 2.-‐15 3. Port call and Northern Site ................................................................................................... 3.-‐1 3.1 Port Call Activities and Transit to Northern Site .................................................................. 3.-‐1 3.2 Northern Site Operations .................................................................................................... 3.-‐1 3.3 Unmanned Surface Vehicle and Passive Acoustic Monitoring System ................................ 3.-‐3 3.4 Environmental Acoustic Recording System (EARS) Buoys ................................................... 3.-‐3 3.5 Glider ................................................................................................................................... 3.-‐4 3.6 Visual Observations ............................................................................................................. 3.-‐5 3.7 Oceanographic Measurements ........................................................................................... 3.-‐6 4. Western Site ........................................................................................................................... 4-‐1 4.1 Transit to Western Site and Operations ............................................................................... 4-‐1 4.2 Unmanned Surface Vehicle and Passive Acoustic Monitoring System ................................. 4-‐3 4.3 Visual Observations .............................................................................................................. 4-‐3 4.4 Oceanographic Measurements ............................................................................................ 4-‐3 5. Return to Northern Site and Southern Site ........................................................................... 5-‐1 5.1 Return to Northern Site ........................................................................................................ 5-‐1 5.2 Southern Site ........................................................................................................................ 5-‐3 5.3 Unmanned Surface Vehicle and Passive Acoustic Monitoring System ................................. 5-‐4 5.4 Visual Observations .............................................................................................................. 5-‐5 5.5 Oceanographic Measurements ............................................................................................ 5-‐5
6. Surface PAM and Visual Observation Tracks ........................................................................ 6-‐1 6.1 Operations ............................................................................................................................ 6-‐1 6.2 Unmanned Surface Vehicle and Passive Acoustic Monitoring System ................................. 6-‐4 6.3 Visual Observations .............................................................................................................. 6-‐8 5.4 Oceanographic Measurements ............................................................................................ 6-‐9

ii
7. Appendices ............................................................................................................................. 7-‐1 7.1 EARS Mooring Information ................................................................................................... 7-‐1 7.2 Visual Observation Summary ............................................................................................... 7-‐2 7.3 Ethogram Codes ................................................................................................................... 7-‐3 7.4 CTD Data Conversion Procedure .......................................................................................... 7-‐4 7.5 Ping Schedule ....................................................................................................................... 7-‐5

Chapter 1. Introduction Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
1-‐1
1 Introduction
1.1 Littoral Acoustic Demonstration Center – Gulf Ecological Monitoring and Modeling (LADC-‐GEMM) deployment cruise
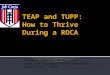
The LADC-‐GEMM 2017 Gulf of Mexico Experiment cruise (R/V Pelican Cruise PE17-‐23) is the continuation of the 2015 and 2016 passive acoustic data collection near the 2010 oil spill site to study the impact of oil spill on deep divine marine mammals and broader Gulf of Mexico ecosystem. The additional objective of the cruise is a comparison of effectiveness of three Passive Acoustic Monitoring (PAM) platforms (unmanned surface vehicle (USV) towed PAM array, gliders, and bottom-‐anchored buoys) in detecting and classifying marine mammals. During the cruise three bottom-‐mounted PAM moorings (each containing two Environmental Acoustic Recording System (EARS) buoys) were deployed at the Northern Site, and one each at the Western and Northern Sites (Fig. 1-‐1) for long-‐term (4-‐month) acoustic monitoring. In addition, a sea-‐glider was deployed and a remotely operated USV, C-‐Worker-‐5 built by ASV Global, with a towed hydrophone array and PAM system installed surveyed for marine mammals in real time during the cruise.
The LADC-‐GEMM consortium is in a unique position among those conducting passive acoustic studies in the Gulf of Mexico after the spill given its access to regional pre-‐spill data unavailable elsewhere. Prior to the 2010 oil spill, LADC had conducted six broadband passive acoustic surveys in the Gulf of Mexico in the Mississippi Canyon/Valley region. In 2007 LADC conducted a two-‐week visual and acoustic survey of marine mammal activity just 9 and 23 nmi from the Deep Water Horizon spill site, giving LADC a unique pre-spill baseline dataset of marine mammal activity and anthropogenic soundscapes near the oil spill site. Earlier surveys had also been conducted at sites 50 nmi from the incident site. In September 2010, LADC returned to those same survey sites to repeat underwater acoustic recordings, gathering data to support the first and possibly only comparisons of pre-‐ and post-‐spill estimates of the marine mammal abundances in the vicinity of the event based on their acoustic activity. In June 2015 and September 2016 LADC-‐GEMM redeployed passive acoustic monitoring systems at the previously studied sites to collect new long-‐term data on marine mammal abundances in the vicinity of the DWH accident location and to understand their habitat use and short-‐range migrations. These datasets, and the newly collected data from June 2017 will contribute in studying the long-‐term impact of the oil spill on resident populations of deep diving marine mammals.
The main objectives of the LADC-‐GEMM 2015-‐2017 Gulf of Mexico Field Experiments, as summarized by Sidorovskaia and Shipboard Scientific Party (2015, 2016), are to:
a) Continue data collection simultaneously utilizing three passive acoustic monitoring
(PAM) platforms (bottom moored buoys, deep-diving Seagliders, and unmanned surface vehicles (USVs)) to establish a precedent of long-term PAM of the marine mammal recovery after the Deep Water Horizon oil spill;

Chapter 1. Introduction Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
1-‐2
b) Test effectiveness of different PAM platforms for near real-time detection, characterization, and monitoring of the impact of environmental changes of different magnitude and duration on deep diving Gulf of Mexico marine mammals by utilizing the integrated experimental capabilities of the consortium;
c) Collect various physical-oceanographic data (temperature, salinity, oxygen concentration, plankton fluorescence, bathymetry, water samples) for habitat preference characterization;
d) Supplement acoustic encounters with concurrent visual observations for acoustic detection and classification verifications.
Fig. 1-‐1. Location map of LADC-‐GEMM Gulf of Mexico 2017 Experiment Sites (North, West, South); numbers indicate oil platforms.
References: Sidorovskaia, N. and Shipboard Scientific Party, 2015. Proc. LADC-GEMM 2015 Gulf of
Mexico Experiment. Lafayette, LA (LADC-‐GEMM), 50 p. Sidorovskaia, N. and Shipboard Scientific Party, 2016. Proc. LADC-GEMM 2016 Gulf of
Mexico Experiment. Lafayette, LA (LADC-‐GEMM), 16 p.

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐1
2. Methods
2. 1 Authorship
All shipboard scientists contributed to this volume. However, certain sections were written by discipline-‐based groups of scientists as listed below (authors are listed in alphabetical order, no seniority is implied):
Introduction and Summary: Sidorovskaia Methods: LADC-‐GEMM Scientists Operations: Sidorovskaia Autonomous Surface Vehicles/PAM: Chance, Comeaux, Marzolf, Pierpoint, Scala Environmental Acoustic Receiving System: Griffin, Lingsch, Sidorovskaia Glider Operations: Heimlich Marine Mammal Observations: Greenhow, Hahn, Whitt Oceanographic Data Collection: Richter
2.2 Overview
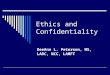
Acoustic monitoring systems, marine mammal observations, and physical properties measurements for the LADC-‐GEMM 2017 Gulf of Mexico Experiment were made on the R/V Pelican to characterize and understand the long-‐term spill impact and the marine mammal recovery after the oil spill and to test new and cost-‐effective PAM approaches. The experiment was designed to simultaneously deploy three PAM platforms, consisting of (1) an Unmanned Surface Vehicle (USV) equipped with towed hydrophone array, (2) five vertical bottom anchored moorings of autonomous Environmental Acoustic Recording System (EARS) buoys, and (3) a Seaglider, paired with an extensive visual mammal observation program. Sound speeds were spatially and temporally mapped from temperature measurements obtained using expandable bathythermographs (XBTs) and from temperature and salinity values recorded by the conductivity-‐temperature-‐depth (CTD) underwater unit.
Operations were conducted on the R/V Pelican (Fig. 2-‐1), an oceanographic research vessel owned by the Louisiana Universities Marine Consortium (LUMCON) and operated out of the Marine Center in Cocodrie, Louisiana, ~140 km SW of New Orleans. The Pelican is maintained as an American Bureau of Shipping (ABS) Class A-‐1+ AMS vessel, with an overall length of 35 m and a maximum sustained speed of 9.2 knots.

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐2
Figure 2-‐1: R/V Pelican at the Marine Center in Cocodrie, LA during port call on June 8, 2017.
2.3 Unmanned Surface Vehicle / Towed PAM Survey
The towed hydrophone array deployment and real-‐time PAM was a collaborative effort between Seiche Ltd. and ASV Global Ltd. The aim was to survey for marine mammals using a towed hydrophone array and PAM system installed on a remotely operated, unmanned surface vehicle (USV; Fig. 2-‐2).
Figure 2-‐2: The C-Worker 5 m USV ‘CW76’ at LUMCON (Photo: Chris Pierpoint)

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐3
2.3.1 Aims and Objectives
• Determine the distribution of marine mammal species from acoustic detection of their vocalizations.
• Estimate sperm whale density acoustically (and also beaked whale density, should there be sufficient number of animals detected) using distance sampling methods.
• Collect data simultaneously with the sub-‐sea glider and the EARs, to enable cross-‐platform comparisons of their detection capabilities.
2.3.2 Survey Design
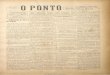
A systematic vessel track was designed for the survey area using an equal-‐angle zig-‐zag sampler with a randomized start point (Fig. 2-‐3). The total planned trackline distance was 939 km (507 nmi), providing 12.5% survey coverage of an area of 7486 km2. The track was designed to make efficient use of the available vessel time, taking into account the other cruise objectives (e.g., glider deployment, EARS moorings installation), whilst surveying the marine mammals of the region in an unbiased manner.
Fig. 2-‐3. Towed hydrophone survey transects planned for the LADC-‐GEMM 2017 cruise.
2.3.4 Unmanned Surface Vehicle (USV)
ASV Global provided and operated a 5-‐m C-Worker USV (‘CW76’). The plan was for the R/V Pelican to tow the USV from LUMCON to the survey area. The USV would then proceed along survey track lines at an average speed of 5 kt.

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐4
CW76 was piloted by ASV personnel stationed on the R/V Pelican via a Cobham Radio telemetry link. During transects, it was intended that CW76 travelled 2.5 km ahead of R/V Pelican, approximately 20° off Pelican’s starboard bow. 2.3.5 PAM System
The PAM system was supplied and operated by Seiche Ltd. The system installed on USV CW76 (Fig. 2-‐2) consisted of a pair of hydrophones and a depth sensor mounted on a 220-‐m tow cable; a 10-‐m deck cable and slip-‐ring connection; analogue interface electronics (‘buffer box’); National Instruments USB-‐6251 analogue-‐digital convertor (ADC for audio data); Measurement Computing USB-‐1208LS (ADC for array depth); a Windows 10 PC; and a Hemisphere V102 GPS compass. The electronics were rack-‐mounted in the payload bay of CW76.
A 200 m in-‐sea length of tow cable was deployed from a remotely-‐operated winch. The hydrophone array section included two identical, spherical elements (H0, H1), spaced 2 m apart. The hydrophones and corresponding pre-‐amplifiers were potted in polyurethane resin. The tow cable diameter was 14 mm, and 32 mm over the potted sections. At 5 kt speed through the water, the array was expected to tow at a depth of approximately 15 m. 2.3.5.1 Recording Chain
The pre-‐amplifier output of the two hydrophone channels was transmitted via the tow cable and a short deck cable, to the buffer box interface electronics mounted in the USV payload bay. A high-‐pass filter was applied (nominally 40 Hz), and a low-‐pass anti-‐aliasing filter (nominally 180 kHz). The data were then sampled using USB-‐6251 ADC at a rate of 500 kHz per channel, 16-‐bit sample size.
Sound recordings were made on a PC running the software Pamguard64 v1.15.11 (www.pamguard.org) under Java 8 (64-‐bit) and Microsoft Windows 10 (64-‐bit). These audio data were continuously recorded as 16-‐bit wav-‐format (.wav) files. Recording file size limit was set to 1.5 Gb (~13 min). Each file was named using a date/time stamp (yyyymmdd_hhmmss_sss, the last three digits being milliseconds) with a prefix denoting the towing vehicle (e.g. CW_20170624_160005_421.wav). The time stamp was obtained at the onset of the recording from the PC system time, which was set automatically from a GPS input at the beginning of the cruise and at intervals, whenever Pamguard was restarted. The sound recordings were written to a 2-‐Tb solid-‐state drive.
2.3.5.2 System Calibration
The hydrophone system components were tested and the recording chain was calibrated by Seiche Ltd. prior to the survey. At the first stage of calibration the response of each of the ceramic hydrophone elements was measured against a Brüel & Kjær reference transducer to measure their sensitivity and verify that this fell to within tolerance limits from the expected value.

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐5
The frequency response of the amplification and filter stages was then recorded using an injected sine wave swept across the range 10-‐200,000 Hz. Finally, after potting the array, a full end-‐to-‐end calibration was conducted in a test tank against a Brüel & Kjær reference transducer; this verified the characteristics of frequency response curve and identified the reduction in gain due to cabling and assembly. The tank test results were used to establish whole-‐system gain values and system sensitivity. No additional amplification was applied in software.
The nominal sensitivity of each hydrophone channel, the -‐3 dB points and -‐6 dB points of their frequency response are provided in Table 2-‐1.
Array Channel Sensitivity
(dB re: 1V/µPa) -‐3 dB points (Hz) -‐6 dB points (Hz)
CW (220 m) H0 -‐167.7 34-‐110,000 26-‐160,000
CW (220 m) H1 -‐165.8 34-‐100,000 26-‐140,000
Table 2-‐1. PAM system calibration data.
2.3.5.3 Non-‐acoustic Sensors
The array included a 30-‐bar pressure/depth sensor. The manufacturer specified a working range for the sensor of 0-‐310 m, with resolution +/-‐1% depth. A Pamguard module calculated and displayed array depth (m) from the received voltage fluctuations. The voltage and calculated depth were read at 2 s intervals and written to a database table.
A Hemisphere V102 GPS compass was mounted on the deck of the USV. Pamguard read the NMEA data strings $GPGGA (position) and $GPHDT (heading) once per second and wrote these data to the common SQLite database.
2.3.5.4 Real-‐time Monitoring
The USV PAM system was monitored in real-‐time by operators on R/V Pelican. The remote desktop images was transmitted over the ASV Cobham Radio telemetry link, using the software TeamViewer, to a Local Monitoring Station (LMS). The audible signals of H0 and H1 were also broadcast to the LMS, using Unreal Streaming software: Live Server, Media Server and Streaming Media Player.
Two PAM operators manned the LMS on a 6-‐h rotation. The aim was to monitor the USV PAM system, and to log acoustic detections of marine mammals. The audio stream was listened to over headphones. The LMS consisted of a mini-‐PC interfaced to the CW76 VPN network, two monitors, a separate laptop computer that was used for logging observations, GPS and AIS inputs and a pair of headphones. This equipment was installed in the dry lab onboard R/V Pelican.
The PAM operator monitored a 0-‐24 kHz spectrogram display for tonal sounds and broadband sperm whale clicks (2018-‐FFT window length, 50% hop, Hann function); a low frequency (LF: 0-‐24 kHz) click detector (time versus bearing display) for sperm whale click trains; a high frequency (HF: 20-‐180 kHz) click detector (time versus bearing and time

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐6
versus amplitude displays) for beaked whale, Kogia and delphinid echolocation; and a map display of the vessel’s track.
Click Detectors
Bearings to clicks are calculated using a cross-‐correlation function to measure the time-‐of-‐arrival delay between the front and rear hydrophone channels. Click bearings were plotted against time in 30 s to 10 min windows. Click amplitude was also plotted. The PAM operator was able to examine waveform, spectrum and Wigner plots of individual clicks.
The HF click detector used click classification algorithms to assist in species group discrimination. Click classifiers were run in real-‐time that color-‐coded individual clicks as ‘Beaked Whale of Delphinid’, ‘Kogia’ or ‘unclassified’. The ‘Beaked Whale or Delphinid’ classifier identified clicks with relatively high energy in the 24-‐60 kHz band compared to two control bands (10-‐20 kHz and 60-‐180 kHz). The ‘Kogia’ classifier targeted narrowband clicks with peak energy in the 100-‐150 kHz band. Click length was included as an additional parameter in each classifier. Color-‐coding by the classifiers provided a useful cue for the PAM operator to look more closely at click train patterns and individual click characteristics. Delphinid echolocation clicks were highly variable in peak frequency and were discriminated from beaked whale vocalizations by other characteristics (e.g., rapidly changing inter-‐click interval and bearing angle, predominance of clicks with a relatively short duration waveform with few oscillations, likely presence of FM whistle calls).
The click event clips are stored in an efficient binary format. Click detector filter settings and classifiers can be modified when the detectors are re-‐run offline on wav-‐format sound recordings.
Click Train Localization
Bearings to LF click trains (sperm whale) and HF click trains (beaked whale, Kogia, delphinid) could be plotted on a map display. Bearing line plots are initiated by manually selecting single clicks to track within the click detector module. The PAM operator localized some animals in 2D by tracking time series of bearings over a period of several minutes (this is referred to as Time Motion Analysis), although thorough localization would be carried out systematically during offline post-‐processing. For animals that remain at approximately the same location (in the horizontal plane) during the tracking period, bearing lines from the hydrophone array cross at their location and Pamguard calculates the animals’ most likely positions using either least-‐squares or 2D simplex regression.
The linear pair of hydrophones provided two sets of bearings and estimated positions for each localized animal, one on either side of the vessel’s track; this is referred to as left-‐right ambiguity. A Chi2 goodness-‐of-‐fit test was used to identify to which side of the trackline the localized animal was most likely to be located. These localization data are written to SQLite database tables.

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐7
Real-‐time PAM Effort and Detection Logging
The PAM operators used a laptop on which to log effort and detection data. The laptop ran Pamguard with a map display and two user-‐defined ‘Logger’ forms (Effort, Detections). The laptop had GPS and AIS inputs. These data were plotted to help track the progress of CW76 along its trackline and its location relative to R/V Pelican. The AIS data also help the operator interpret background noise attributed to other nearby vessels. PAM effort and detection information, plus GPS and AIS data, were written to a database stored on the laptop. 2.3.5.5 Data Formats
Recording Device Data Formats Contents
C-‐Worker CW76 PC wav-‐format sound recordings audio
SQLite database GPS, settings, localisation
binary format Pamguard files click event data
R/V Pelican LMS (remote viewing only)
R/V Pelican Logger Laptop SQLite database GPS, AIS, effort, detections
Table 2-‐2. Data formats recorded during the towed array survey.
2.4 Environmental Acoustic Recording System (EARS) Buoys
Environmental Acoustic Recording System (EARS) is a passive acoustic monitoring (PAM) system used to record broadband acoustic soundscapes with post-‐recovery processing to detect and classify marine mammal phonation. For these studies EARS are deployed on fixed moorings either 300 or 550 m long and deployed in water depths between 1000 and 2000 m. The mooring design ensures that a hydrophone is placed near the foraging depths of sperm and beaked whales to increase the probability and detection range. EARS electronics and hydrophone are deployed between a 500 kg anchor and 10 to 12 glass ball floats (see Table 2-‐3 for details of the EARS configuration and Figure 2-‐4 for a graphical sketch). This configuration allows for positioning the recording system at water depths where marine mammals are feeding. Data are continuously recorded at 192 kHz sampling rate for approximately 100 days (limited by 4 Tb hard disk storage space per channel) at which time the moorings are recovered and the data are processed. The data are stored as 16-‐bit integers in proprietary binary format. The recovery uses acoustic

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐8
releases that detach the anchor weight when a special acoustic message is received. The recording package will then float to the surface for recovery.
After loading the equipment during port call, the mooring assembly process was immediately started. Given the length and size of each mooring, it is shipped in sections and assembled onboard. There is only enough deck space on the R/V Pelican to manage two assembled moorings at a time. Mooring assembly is tedious and working on the ship’s metal deck in 35°C heat only adds to the fun. The assembly phase, however, is critical. Details such as insuring that every shackle is properly secured, cotter pin in place and taped must be checked and double-‐checked. A single error could result in the loss of the entire mooring. Each mooring is ‘snaked’ on deck in the order in which the mooring components are deployed (Fig. 2.5). D-‐rings are placed in strategic mooring locations for ‘tag’ lines to secure the mooring to insure an orderly and controlled deployment. Much thought is put into how the mooring can be deployed so no personnel have to step into the bight (a position between the mooring and the water) to deploy the mooring.
For the current deployment each mooring included two paired single channel EARS bottles with a 1 m hydrophone separation. One short mooring (250 m in length) was deployed in water depth of 1000 m and four long moorings (each 550 m in length) were deployed in water depth of 1500 m (See Appendix 7-‐1 for hardware and serial number details). To decrease the probability of a loss due to accidental early surfacing, the Iridium satellite beacon was installed and activated on each mooring deployed in 2016 and 2017.
Figure 2-‐4: Schematic of the EARS configuration.

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐9
Table 2-‐3: Setup of the EARS moorings.

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐10
Figure 2-‐5. EARS buoys, floats, beacon, and acoustic releases on the Pelican deck “snaked” before deployment.
2.5 Glider
The Seaglider (Fig. 2-‐6), Oregon State University Seaglider No. SG607 “Will”, is an underwater autonomous vehicle, build by Kongsberg Maritime AS. The glider controls its buoyancy (hence depth) via an external bladder, which expands or contracts. It can also control both pitch and roll by moving a weight inside the glider. By varying pitch and roll in combination with changing buoyancy and fixed wings and tail fin, the vehicle is able to drive itself forward and steer, even though it has no propeller or movable rudder. At every surfacing, the glider communicates via an Iridium RUDICs connection to a base-‐station at Oregon State University. The glider pilot on the ship can also communicate with this base-‐station via the ship's internet connection, to monitor data acquisition and adjust flying parameters. For this 24-‐hour operation, the assistance of shore-‐based pilots is gratefully acknowledged (Dr. Anatoli Erofeev and Selene Fregosi, Oregon State University).
Real-‐time data, including tracks and transects, are available at the OSU website at http://gliderfs2.coas.oregonstate.edu/sgliderweb/seagliders/sg607/current/procdata/index.php.
The Seaglider measures temperature, conductivity, and pressure at a 4 s rate, using a built-‐in unpumped CT Sail (Sea-‐bird Electronics, Inc.). The glider for this project is also equipped with a proprietary recording system called a WISPR (Oregon State University and University of Washington). It turns on at depths below 25 m and records at a 125 kHz sampling rate, 16 bit. The hydrophone is built by Hydroacoustic Technology, Inc. and has a sensitivity of -‐176.1 dB (HTI-‐92 s/n 638006). The PAM program “WISPR” is version

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐11
“beaked whale”, build date 27 May 2015. Early indications are that all of the data streams are of good quality.
Figure 2-‐6. Seaglider on the R/V Pelican with Sara Heimlich and Sean Griffin shortly before deployment.
After the R/V Pelican cruise, the Seaglider will continue data collection on its path
around the three points for approximately one month. Oregon State University scientists will continue to pilot the glider (Pierce, Erofeev, and Fregosi) until planned recovery in July 2017. The second glider, which had been planned for the 2017 deployment, was damaged during shipping from OSU to LUMCON and was not deployed.
2.6 Visual Observations
Visual observations were conducted during daylight hours with the aid of two Fujinon big eye binoculars (25 x 150) with a maximum visibility distance of just under 5 nautical miles, and a handheld Garmin GPS. . The big eyes were mounted on the port and starboard side of the bridge deck. “On effort” observations were made with at least two observers using the big eye binoculars for dedicated scanning, with a 20° overlap of scanning area across the bow of the ship. When weather conditions were too rough (BSS >4, swell height >4 ft) for big eye observations to be effective, “half effort” observations were made with at least two observers scanning the entire forward field of view (180°) with 7 × 35 handheld binoculars and naked eye. Data sheets were completed for each sighting, noting sighting time and location (latitude and longitude), bearing and distance of sighting from the vessel, group size, species ID, group composition, the first cue of the sighting, environmental data, and behavioral data. After the completion of each observation day, data sheets were converted to digital records and compiled for the duration of the

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐12
cruise. A summary of all observations is provided in Appendix 7-‐2. Ethogram codes are provided in Appendix 7-‐3.
Observer abbreviations: Greenhow (DG), Whitt (AW), Hahn (AH), Heimlich (SH), Firneno (MF), Sidorovskaia (NS).
Figure 2-‐7. Port-‐side Fujinon big eye binocular installed on the bridge deck.
2.7 Oceanographic Measurements
2.7.1 CTD Underwater Unit
Seawater conductivity, temperature, pressure, oxygen concentration, fluorescence, and turbidity were measured at each site using a Sea-‐Bird SBE 911 CTD underwater unit equipped with a twelve-‐bottle carousel water sampler (Fig. 2-‐8). The SBE 911 is designed to collect vertical profiles of all parameters at 24 scans per second (24 Hz) in marine or freshwater environments of up to 10,500 m water depth (Sea-‐Bird Electronics, 2005).
SEASAVE software, a CTD acquisition software by Sea-‐Bird provided real-‐time graphical representation during acquisition on the screen. After each station, the raw CTD data were run through the Sea-‐Bird SBE data processing software modules Data Conversion and Bin Average, to convert from HEX to ASCII and to average the 24 Hz-‐data over one-‐meter intervals (for details see Appendix 7-‐4).
The Sea-‐Bird CTD cast configuration was as follows: Frequency 1 – Temperature Frequency 2 – Conductivity sensor Frequency 3 – Digiquartz with TC Pressure sensor

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐13
Frequency 4 – Free Frequency 5 – Free A/D voltage 0 – Oxygen SBE 43 A/D voltage 1 – Oxygen SBE 43, 2 A/D voltage 2 – Altimeter A/D voltage 3 -‐ Transmissometer, WET Labs C-‐star A/D voltage 4 – pH (until Cast #5) A/D voltage 5 – Oxidation Reduction Potential A/D voltage 6 – PAR/Irradiance, Biospherical/Licor A/D voltage 7 – Fluorometer, Seapoint SPAR voltage – Unavailable SPAR voltage – SPAR/Surface Irradiance s/n 20367
Figure 2-‐8. Sea-‐Bird SBE 911 CTD underwater unit In this report, only data from the temperature, conductivity, oxygen, and
fluorometer sensors are presented. The remaining data are available from the raw data archives. 2.7.2 Expendable Bathythermographs (XBTs)
Expendable bathythermograph probes provide a measure of water temperature versus depth, which is used to calculate the sound speed profile of the water beneath the vessel. The sound speed structure in the water column controls the path followed by acoustic energy produced either on or by the vessel or by marine mammals in the area of operation. The XBT probe consists of a weighted sensor, hydro-‐dynamically shaped to

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐14
descend at a constant known speed. The probe has a metal nose that provides a grounding path to the data acquisition system on the ship, which is triggered when the probe hits the water. Probe depth is calculated from the time elapsed since the probe entered the water. XBT probes sample temperature using an integrated thermistor and send the measurements to the data acquisition system along a two-‐conductor insulated wire.
Acoustic velocity is calculated from temperature using the method of Chen and Millero (1977) and Fofonoff and Millard (1983), which also requires the salinity of the water. Because salinity is not measured by the XBT, an average value of 35 ppt was estimated based on results from the CTD drops.
2.7.2.1 XBT launcher and data acquisition system
The XBT system comprised of a hand-‐held launcher and a Lockheed Martin Sippican, Inc. MK21 I/O module (serial number 590, running November 15, 2001 firmware) connected via USB to a laptop PC (Fig. 2-‐9).
The data acquisition software was Win MK21 version 7.0.0 (Build 13), which was configured to automatically save an Export Data File (EDF) and automatically backup data as they were acquired. The probes were deployed over the starboard rail adjacent to the aft entry door to the wet lab of the R/V Pelican (Fig. 2-‐10).
The T-‐5 XBT probes reach a maximum depth of 1860 m and can be deployed while the vessel is travelling at less than 6 knots, i.e., the traveling speed of the Pelican while being accompanied by the USV.
Figure 2-‐9: A. The XBT hand-‐held launcher ready with a T-‐5 probe in its launch tube (top), and an unused T-‐5 probe (bottom). B. The Lockheed Martin Sippican MK21 I/O module installed in the wet lab of the R/V Pelican.
Figure 2-‐10: The launch location (red dot) for the XBT probes on the main deck directly behind the aft entry to the bottle lab (modified from LUMCON).

Chapter 2. Methods Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
2-‐15
2.8 R/V Pelican Underway Data
The ship is equipped with an underway data system that continuously measures surface water properties, including temperature, salinity, and light transmission. Atmospheric air temperature, barometric pressure, relative humidity, and wind speed and direction are also recorded continuously. The underway data stream is available in real time via the shipboard network and available from the data archives.
2.9 References
Chen, C.-‐T. and Millero, J., 1977. Speed of sound in seawater at high pressures. J. Acoust. Soc. Am., 62, 1129-‐1135.
Fofonoff, N.P. and Millard, R.C., 1983. Algorithms for computation of fundamental properties of water. UNESCO Technical Papers in Marine Science, 44, UNESCO Division of Marine Science (Paris).
Sea-‐Bird Electronics, 2005. 911plus CTD System Operating and Repair Manual.

Chapter 3. Northern Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
3-‐1
3. Port call and Northern Site
3.1 Port Call Activities and Transit to Northern Site
Port call activities in Cocodrie, Louisiana, commenced on 7 June, 2017 and included refueling, loading supplies and equipment for the LADC-‐GEMM expedition. Shortly before departure on 8 June, 2017 a safety meeting with a presentation by the captain was held for all LADC-‐GEMM participants.
The R/V Pelican departed for Cruise PE17-‐23 from the Cocodrie port at 1641 hrs on 8 June 2017, on route to the Northern Site. Note, all times are given in local times (= UTC – 5 hours). To save transit time, it was decided to tow the USV C-Worker 5 close to the first deployment site (Northern Site). The surface fluorometer was turned on in the evening and a science meeting was held by the chief scientist to provide an overview of the scientific goals and the planned operations. The ship averaged 7.0-‐8.0 knots on the ~140 nmi (185 km) transit and arrived near the Northern Site (28° 38.0874’ N/88° 33.1720’ W) at 0900 hrs on 9 June 2017 (Fig. 3-‐1). The transit in calm, one ft-‐seas was pleasant and uneventful.
3.2 Northern Site Operations
Operations near the Northern Site began at 0700 hrs on 9 June with preparations for the mooring deployment. The weather was nearly perfect, 0.5 feet seas, sunny. Currents were 0.3 knots E on the surface, and 0.3 knots (E-‐component) and 0.3 knots (N-‐component) at 60 m depth.
The USV was un-‐roped at 0900 hrs at 28° 38.1147’ N/88° 33.047’ W and the hydrophone array unreeled. The first XBT probe (SN: 370890) was dropped at 0910 hrs at 28° 38.1139’ N/88° 32.968’ W. At 0940 hrs the Pelican was moved to a position (28° 38.08’N/88° 32.535’W) to deploy the first mooring. Deployment started in perfect weather at 0945 hrs at 28° 38.06’ N/88° 32.53’ W, about 2 km from the target.
The first EARS mooring was deployed in 1586-‐m water depth at 1008 hrs (anchor drop). The anchor drop coordinates are 28° 38.08’ N/88° 33.497’ W, 400 m passed the target location (28° 38.0874’ N/88° 33.1720’ W) to account for the “pendulum” effect.
At 1043 hrs the R/V Pelican was moved to a position to deploy the second mooring at the Northern Site in 1615-‐m water depth at 28° 37.793’ N/88° 31.842’ W. The target location for the second mooring was 700 m from the first mooring down the drift line. The visual observation team detected unidentified species of dolphins at that location. Deployment of the second mooring commenced at 1100 hrs at 28° 38.101’ N/88° 32.695’ W with the anchor drop at 1120 hrs at 28° 38.090’ N/88° 33.842’ W (captain’s GPS) in 1569-‐m deep water.
By 1130 hrs operations at the second mooring site were complete and preparations for the deployment of the glider commenced. At 1300 hrs the glider was loaded onto a small boat for deployment at a significant distance away from the R/V Pelican. The glider was deployed at 1320 hrs at coordinates 28° 38.59’ N/88° 32.45’ W (Fig. 3-‐1), tested, and started on its predetermined path. At 1430 hrs, in celebration of the successful deployment

Chapter 3. Northern Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
3-‐2
several (4?, one smaller size) sperm whale blows were observed (327° of North) when ship was at 28° 39.083’ N/88° 31.915’ W.
After recovery of the small boat and preparing the third mooring for deployment the R/V Pelican was moved to coordinates 28° 38.344’ N/88° 32.388’ W at 1525 hrs in position to install the third mooring at the Northern Site to complete the equilateral triangle configuration of the three moorings. At 15:30 the third sperm whale fluked and group went to a deep dive. The deployment started at 1537 hrs and ended successfully with the anchor drop at 1555 hrs at 28° 38.418’ N/88° 33.627’ W in 1565-‐m deep water.
Figure 3-‐1. EARS deployment at the Northern Site. Top left: Mooring ready for deployment; top right: floats in the water; bottom left: release deployment; bottom right: anchor drop.
Positioning of the three installed moorings commenced immediately after the last deployment and ended at around 1930 hrs. Both releases on each mooring were communicated with and successfully responded. Subsequent calculations of the positioning data did not converge into a meaningful solution. The reason for this failure could be problems with the default time delay in the Teledyne deck box or a short horizontal distance (500 m) from the presumed mooring position, or a combination thereof. For operational reasons it was decided to postpone a repeat of the positioning procedure with greater distance from the target and the release-‐native EdgeTech ranging deck unit at a later time during the expedition.

Chapter 3. Northern Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
3-‐3
Note: The R/V Pelican returned on 12 June to the Northern Site and successfully positioned the three installed moorings (see Section 5.1; Table 5-‐1 for results).
Operations at the Northern Site continued until 0123 on 10 June with two passes of the USV in a box pattern around the moorings for the cross-‐platform comparison. The box coordinates are: SW corner (28° 38.082’ N/88° 35.376’ W), NW corner (28° 38.431’ N/88° 35.385’ W), NE corner (28° 38.399’ N/88° 31.646’ W), and SE corner (28° 38.090’ N/88° 31.641’ W).
The real-‐time PAM had many sperm whale encounters and possibly one Risso’s dolphin encounter inside the box during the passes. At 0123 hrs on 10 June operations at the Northern Site ended and the R/V Pelican was underway for the short 28 nmi transit to the Western Site.
3.3 Unmanned Surface Vehicle and Real-‐time Passive Acoustic Monitoring System
After arrival at the Northern Site the USV was un-‐roped at 0900 hrs at 28° 38.1147’ N/88° 33.047’ W and released from the tow. All went according to plan, the systems were locked off and connected and everything was working as expected. The rest of the day was spent in a box pattern around the North Site while the ship was mainly stationary or on pre-‐determined path during the deployment of the EARS buoys and the glider. After deployment operations at the Northern Site ended in the evening of 9 June and the USV continued the box-‐shaped survey pattern until 0123 hrs on 10 June. Detections with the passive acoustic monitoring system mounted on the USV are detailed in Table 3-‐1.
Table 3-‐1: Dolphin and whale detections from the PAM system at the Northern Site.
3.4 Environmental Acoustic Recording System (EARS) Buoys
After leaving port on 8 June mooring assembly continued until completed in the evening. On 9 June at 0630 hrs another visual inspection was performed on each mooring and then the process of verifying proper performance of the electronic packages began. EARS buoys have diagnostic tests that were performed and the acoustic releases were checked for proper operation. The moorings include MMI-‐513-‐12iBCN Iridium beacons and MMF-‐7500 Novatech Mini LED Flashers to decrease the risk of mooring loss during

Chapter 3. Northern Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
3-‐4
accidental surfacing. Satellite communication was activated before the start of the deployment and test messages were received. The ship arrived on station at 0940 hrs. The beacon of the first mooring was deployed first, then the mooring floats, the EARS, more floats, the acoustic releases, and then the anchor (for details see Methods Chapter). After the deployment of the second mooring at 1120 hrs the glider was launched from a small boat at 1320 hrs followed by the successful deployment of the third mooring at the Northern Site at 1555 hrs. 3.5 Glider
The underwater autonomous vehicle, a Seaglider, was deployed on 9 June at 1320 hrs near the Northern Site. The physical deployment was by small boat lowered by the ship's crane off the port side some distance away from the R/V Pelican (Fig. 3-‐3). The Seaglider was programmed to perform a sawtooth cycle which takes about 4.5-‐5 hours to complete (surface to surface), goes down to a depth of about 1000 m, and moves about 4 km horizontally (with currents).
Following deployment, the Seaglider was programmed to stay at the Northern site until 16 June to complete the cross-‐platform comparison. The target dive pattern was the straight line between the NE and SW corners of the USV box. After R/V Pelican leaves the operation area, the glider will be reprogrammed to run a continuous clockwise circuit around the three waypoints: North, South, and West (Fig. 3-‐2) corresponding to the EARS mooring sites to the end of its operations, one month after the deployment. At every surfacing, the glider communicates via an Iridium RUDICs connection to a base-‐station at Oregon State University (Table 3-‐2).
Figure 3-‐2. Glider track and planned path for the 2017 LADC-‐GEMM expedition (OSU website; accessed June 16, 2017).

Chapter 3. Northern Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
3-‐5
Figure 3-‐3. Glider deployment.
Table 3-‐2. Glider dives during the 2017 LADC-‐GEMM expedition near the Northern site (OSU website; accessed June 16, 2017).
3.6 Visual Observations
Visual observations were conducted during daylight hours on 9 June from 0820 to 1800 hrs on effort with the aid of two big eye binoculars (25 x 150) and a handheld Garmin GPS. With the exception of three sightings of a group of unidentified dolphins in the morning and six sightings of sperm whales in the afternoon, the day remained uneventful (Table 3-‐3).

Chapter 3. Northern Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
3-‐6
Table 3-‐3: Visual observations at the Northern Site
3.7 Oceanographic Measurements
The oceanographic measurement program was aimed at characterizing the physical properties of the seawater, with an emphasis on determining the sound speed at the Northern Site. One single XBT probe was launched right before the EARS deployment at 0910 hrs on June 9 at 28° 38.1139’ N/88° 32.968’ W.
The XBT probe was successfully dropped at the mooring site with the goal of measuring the water temperature versus depth, which is then used to calculate the sound speed profile of the water column (Fig. 3.4). The average sound speed based on this profile is 1497 m/s. In addition, two CTD casts, C1 (28.65277°N/88.56328°W) and C7 (28.69033°N/88.48033°W) were deployed during the transects (see Table 6-‐3 and Fig. 6-‐3 for details). Results are depicted in Figure 3.5. The fluorescence serves as a proxy for the chlorophyll concentration in phytoplankton and plant material and shows a distinct peak at 100 m below sea surface (Fig. 3-‐3). Below the peak, the fluorescence values remain very low. Surface salinity is around 36 PSU in the top 120 m and drops to <35 PSU below 500 m. Temperature steadily declines from 27°C at the surface to 4°C at the bottom of the cast. Sound speed decreases from 1540 m/s near the surface to 1493 m/s at 1500 m with an average of 1497 m/s (Fig. 3-‐3).
Figure 3-‐4. Temperature data from the XBT probe (in black) and calculated sound speed (in green) at the Northern Site.

Chapter 3. Northern Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
3-‐7
Figure 3-‐5. CTD data collected at the Northern Site (left: C1; right: C7).

Chapter 4. Western Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
4-‐1
4. Western Site
4.1 Transit to Western Site and Operations
The R/V Pelican departed the Northern Site at 0123 hrs on 10 June 2017 for the short, ~28 nmi transit to the Western Site with the USV C-Worker traveling ahead about 1-‐2 km on the starboard side. The ship averaged 4.5 knots and arrived at the Western Site in the early morning hours (0700 hrs) of 10 June 2017. The weather continued to be sunny, with 2-‐ft seas in choppy pattern in the morning, with predicted deterioration to 3-‐4 ft seas later in the day. Many small fishing boats were on the horizon in the vicinity of the “Who-‐Dat” platform (Fig. 4-‐1).
Operations near the site began at 0630 hrs with preparations for the EARS installation. A CTD cast was started at 0750 hrs with the ship positioned not to drift into the 1 nmi radius of the rig. The R/V Pelican moved into position at 0905 hrs and deployment started shortly after at 0922 hrs at 28° 24.195’ N/89° 0.186’ W. The anchor was dropped at 0940 hrs at 28° 23.757’ N/88° 59.209’ W at a water depth of 1034 m. A GPS and ranging positioning survey (Table 4-‐1) was conducted immediately after the EARS deployment and finished successfully at 1300 hrs with the determination of the final position of the mooring at 28° 23.8355’ N/88° 59.2313’ W (Fig. 4-‐2). The positioning was conducted on the “old” release using the “old” EdgeTech deck unit and the “new” release was checked and responded accordingly. The pinging transducer depth was 12 m and the acoustic release depth used in the positioning calculations was 779 m.
In expectation of deteriorating weather conditions over the next few days a personnel transfer by small boat planned for 11 June was moved ahead to the morning of 10 June. The boat arrived at 1030 hrs and left with videographer Jesse Achtenberg in exchange for an additional visual observer, Matthew Firneno (UNO), at 1100 hrs.
Table 4-‐1. Coordinates, slant range, and calculated travel time for positioning sites at the Western mooring.

Chapter 4. Western Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
4-‐2
Figure 4-‐1. EARS deployment at the Northern Site. Top left: Mooring ready for deployment; top right: deployment of floats; bottom left: release deployment; bottom right: anchor drop. Who-‐dat platform visible in the background.
Fig. 4-‐2. Positioning result of the EARS mooring (cross: anchor drop; red dot: final position).
After the successful deployment and positioning of the Western mooring, the C-worker started at 1300 hrs in deteriorating weather conditions on the planned transects

Chapter 4. Western Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
4-‐3
(Figs. 2-‐3 and 6-‐1), to waypoint 28 and then to waypoints 1-‐8, with the R/V Pelican ending operations at the Western Site. The plan was to complete about 120 nm of the transects before departing for the Southern mooring deployment during the afternoon of the next day (June 11). Sperm whales were acoustically detected between 1400 and 1600 hrs. At 1600 hrs the C-Worker was refueled. Its telemetry range was consistently about 2.5 km. A science meeting was held at 1730 hrs. Between the hours of 18.30 and 1900 a tanker and a cruise ship were spotted on the USV site as the R/V Pelican was moving from waypoint 28 to waypoint 1 on the transects. At 1930 hrs a second CTD cast started near waypoint 1 in water depth of 800 m with sperm whale clicks detected at that time. 4.2 Unmanned Surface Vehicle and Passive Acoustic Monitoring System
Detections at the Western Site with the passive acoustic monitoring system mounted on the USV are detailed in Table 4-‐2.
.
Table 4-‐2: Dolphin and whale detections from the PAM system at the Western Site. 4.3 Visual Observations
Visual observations were conducted during daylight hours on 10 June from 0700 to 1700 hrs at different effort levels with the aid of big eye binoculars (25 x 150) and a handheld Garmin GPS. With the exception of a sighting of a blow of an unidentified whale in the early afternoon the day remained uneventful (Table 4-‐3).
Table 4-‐3: Visual observations at the Southern Site 4.4 Oceanographic Measurements
The oceanographic measurement program was aimed at characterizing the physical properties of the seawater, with an emphasis on determining the sound speed at the Western Site. One single XBT probe was launched during the transects near the site at 1442 hrs on June 16 at 28.36000° N/89.02607° W (Fig. 4-‐3).

Chapter 4. Western Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
4-‐4
In addition, a CTD cast, C2 (28.37782°N/89.00810°W) was deployed on 11 June at 750 hrs (see Table 6-‐3 and Fig. 6-‐3 for details) before the mooring deployment. Results are depicted in Figure 4.3. The fluorescence serves as a proxy for the chlorophyll concentration in phytoplankton and plant material and shows a distinct peak at 100 m below sea surface (Fig. 4-‐4). Below the peak, the fluorescence values remain very low. Surface salinity is around 36 PSU in the top 120 m and drops to <35 PSU below 500 m. Temperature steadily declines from 27°C at the surface to 4°C at the bottom of the cast. Sound speed decreases from 1540 m/s near the surface to 1485 m/s at 1000 m with an average of 1501 m/s (Fig. 4-‐4).
Figure 4-‐3. Temperature data from the XBT probe (in black) and calculated sound speed (in green) at the Western Site (X5).
Figure 4-‐4. CTD data collected at the Western Site (C2).

Chapter 5. Return to Northern Site and Southern Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
5-‐1
5. Return to Northern Site and Southern Site
5.1 Return to Northern Site
The R/V Pelican departed the Western Site at 1300 hrs on 10 June 2017 with the initial plan of deploying the final mooring at the Southern Site on 11 June. However, weather conditions were deteriorating quickly with the weather forecast calling for 5-‐6 ft seas building up to 11 June and subsiding soon afterwards. It was decided not to risk the mooring installation in bad weather, but to continue with the USV transects through 11 June and then repeat the failed positioning attempt at the Northern Site and deploy the mooring at the Southern Site when the weather conditions improve.
In the morning of 12 June the sea state had improved slightly and the R/V Pelican had arrived at the Northern Site for positioning of the moorings. The weather was overcast with 3-‐4 ft seas. At 0615 hrs an acoustic encounter with “loud” dolphins and possibly pilot whales occurred near waypoint 11 on the transects. After this encounter the R/V Pelican departed from the transects at waypoint 11. The ranging and GPS survey started at 0730 hrs and continued until 1030 hrs when all three moorings were successfully positioned. Table 5-‐1 details the GPS positions and ranges, and Figure 5-‐1 shows the positioning results of the moorings. A map of the final positions of the three moorings (Fig. 5-‐2) demonstrates the great precision with which the instruments were placed.
Additional notes for the positioning operations and calculations are as follows. The pinger depth was 12 m. The acoustic release depths were about 505 m above the bottom. The N1-‐mooring acoustic release depth was assumed to be 1081 m below surface and it was pinged between 0930 and 1000 hrs. The N2-‐mooring acoustic release depth was assumed to be 1063 m below surface and it was pinged between 0842 and 0915 hrs. The N3-‐mooring acoustic release depth was assumed to be 1059 m below surface and it was pinged between 0739 and 0815 hrs.
Positioning operations at the Northern Site ended at 1030 hrs with a visit of pan-‐tropical dolphins at the bow of the R/V Pelican underway to the Southern Site for one final mooring deployment.

Chapter 5. Return to Northern Site and Southern Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
5-‐2
Table 5-‐1. Coordinates, slant range, and calculated travel time for positioning sites at the Northern moorings.
Fig. 5-‐1. Positioning result of the EARS mooring (cross: guessed position, usually the anchor drop); red: final position). Left: mooring N1, middle: mooring N2 , right: mooring N3

Chapter 5. Return to Northern Site and Southern Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
5-‐3
Fig. 5-‐2. Screen shot of the actual EARS mooring positions (triangle corners) versus anchor drop coordinates.
5.2 Southern Site
The ship averaged 4.5 knots with the USV C-Worker 1-‐2 km ahead on the starboard site for communication purposes and arrived at the Southern Site at 1255 hrs on 12 June 2017. Deployment started immediately at 1300 hrs with the beacon in the water first at 28° 28.464’ N/88° 36.7739’ W (2 km away from the target location). At 1323 hrs the deployment ended with the drop of the anchor at 28° 27.486’ N/88° 36.1153’ W, 400 m past the target location at 28° 27.693’ N/88° 36.2766’ W in 1481 m deep water. Several sperm whale blows where seen at the mooring site right after the anchor drop and four sperm whales with a calf could be observed near the surface at the port site for about one hour (Fig. 5-‐3). Sperm whale codas were recorded.
Fig. 5-‐3. Visit of sperm whales at the Southern Site after mooring deployment.
After deployment and whale observation the ranging and GPS positioning of the
mooring started at 1422 hrs. Table 5-‐2 details the GPS positions and ranges, and Figure 5-‐4 shows the positioning results of the moorings.

Chapter 5. Return to Northern Site and Southern Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
5-‐4
Table 5-‐2. Coordinates, slant range, and calculated travel time for positioning sites at the Southern mooring.
Fig. 5-‐4. Positioning result of the EARS mooring (cross: anchor drop; red: final position). By 1500 hrs on 12 June, 2017, operations at the Southern Site had ended and the
R/V Pelican was underway to execute the planned visual observation and PAM transects to obtain estimates of the marine mammal populations in the survey area. The transects were resumed at point 11 with the plan to complete about 225 nmi of the transects 11-‐12..-‐23 in the next 50 hours with average speed of 4.5 knots. On the way from point 23 to 24 (at point 11) we planned to depart from the transects for the 24-‐hour cross-‐platform comparison at the Northern site.
5.3 Unmanned Surface Vehicle and Passive Acoustic Monitoring System
Detections at the Northern and Southern Sites on June 12 with the passive acoustic monitoring system mounted on the USV are detailed in Table 5-‐3.
.

Chapter 5. Return to Northern Site and Southern Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
5-‐5
Table 5-‐3: Dolphin and whale detections from the PAM system at the Northern and Southern Site.
5.4 Visual Observations
Visual observations were conducted during daylight hours at the Northern Site, the transit to the Southern Site, at the Southern Site, and during the following transect survey on 12 June from 0700 to 1730 hrs with the aid of big eye binoculars (25 x 150) and a handheld Garmin GPS. The day was relatively successful for marine mammal observations with six sightings of dolphins and sperm whales (Table 5-‐3; Fig. 5-‐2; Appendix 7-‐3 for details).
Table 5-‐4: Visual observations at the Northern and Southern Sites on June 12.
5.5 Oceanographic Measurements
The oceanographic measurement program was aimed at characterizing the physical properties of the seawater, with an emphasis on determining the sound speed at the Southern Site. One single CTD cast (C4) was deployed near the site at 1951 hrs on June 12 at 28.47273° N/88.59687° W (Fig. 5-‐5).
The fluorescence serves as a proxy for the chlorophyll concentration in phytoplankton and plant material and shows a distinct peak at 100 m below sea surface (Fig. 5-‐5). Surface salinity is around 36 PSU in the top 120 m and drops to <35 PSU below 500 m. Temperature steadily declines from 27°C at the surface to 4°C at the bottom of the cast. Sound speed decreases from 1541 m/s near the surface to 1488 m/s at 800 m with an average of 1498 m/s (Fig. 5-‐5).

Chapter 5. Return to Northern Site and Southern Site Proceedings of the LADC-‐GEMM 2017 Gulf of Mexico Experiment
5-‐6
Figure 5-‐5. CTD data collected at the Southern Site (C4).

Chapter 6. Surface PAM and Proceedings of the LADC-‐GEMM Visual Observation Tracks 2017 Gulf of Mexico Experiment
6-‐1
6. Surface PAM and Visual Observation Tracks
6.1 Operations
The R/V Pelican departed the Western Site location in deteriorating weather conditions at 1300 hrs on 10 June 2017 with the goal of collecting overlapping PAM observations between the USV-‐mounted monitoring system, the glider-‐mounted system, the EARS moorings, and the visual observations. Data collection along the transect was interrupted 12 June from 0730 to 1500 hrs for the positioning of the moorings at the Northern Site and the deployment of the EARS buoy at the Southern Site. Because the glider was left collecting data along at the Northern site (Fig. 6-‐1) for the PAM effectiveness comparison across three platforms, this area was identified as highest priority for the data collection process. In addition, CTD casts and XBT data were collected at strategic locations along the way.
Figure 6-‐1. Planned transect and waywaypoints with mooring sites indicated by red triangles.
Daily summaries of the transect events are detailed below.
June 11, 2017 The weather is cloudy, 5-‐6 feet seas. At 0730 hrs we passed waypoint 4. Some
delphinids and sperm whale encounters were recorded during the night. The USV and R/V

Chapter 6. Surface PAM and Proceedings of the LADC-‐GEMM Visual Observation Tracks 2017 Gulf of Mexico Experiment
6-‐2
Pelican were averaging 4.5-‐5 knots over night. At 0900 hrs an XBT probe was dropped near waypoint 5 (28° 27.8771’ N/88° 53.2946’ W, termination depth of 1100 m). At 11.45 hrs a second XBT probe was dropped near waypoint 6 as the R/V Pelican was moving at 4.8 knots (28° 40.9952’ N/88° 57.2670’ W, termination depth of 800 m). The decision was made to delay the Southern site deployment due to weather and continue with transects to waypoint 11 over night. At 2000 hrs a CTD cast was deployed in the vicinity of the Southern site.
June 13, 2017 Overcast, 1-‐2 ft seas. R/V Pelican continues on transects. At 11.10 hrs a CTD cast was
deployed in the vicinity of the Southern site (waypoint 16) at 28° 40.759’ N/88° 01.529’ W in water depth of ~2155 m, however the CTD was stopped at 1200 m due to the limited depth rating for the PH sensor (-‐1200 m). A deepwater drill ship was located on the horizon. We observed low oxygen and salinity at the surface (and whales had not been detected for a while). At 1300 hrs an XBT drop was dropped to determine the temperature profile below 1200 m (28° 41.8614’ N/88° 02.9591’ W, termination depth of 1800 m limited by probe). The east transects were terminated at waypoint 17 to stay on schedule. At 1410 hrs sperm whale blows were seen on the port side. At 1630 hrs the ocean surface is completely flat, no more than 1 ft seas, pilot whales acoustic and visual encounters. At 1900 hrs a CTD cast was deployed in shallow water near waypoint 21 (29° 02.064’ N/88° 16.603’ W, in water depth of 765 m).
June 14, 2017 Sunny, 1 ft seas, pilot whales, dolphins, and sperm whales were heard overnight. At
0730 hrs the R/V Pelican passed by the drill ship “Deepwater Asgard” while moving from waypoint 23 to 11. The 16 and 70 kHz pings were heard from the ship. A special safety protocol was put into place during the planned 24-‐hr cross-‐platform comparison at the Northern site. Each glider surfacing was monitored directly through a phone call with the glider pilot at OSU (Selene Fregosi) to avoid any chance of collision with the R/V Pelican or the USV. There were indications that the glider was fighting currents and required two dives to the SW box corner and one dive to proceed from the SW to NE corner of the box. At 1030 hrs a CTD cast was lowered near waypoint 11 (water depth of 1336 m) and ADCP profiles at 1200 kHz, 300 kHz, and 75 kHz were briefly switched on to assess the deep water currents.
The current summary is: surface-‐ 0.9 knots 53° E of N, 5-‐15 m – 0.8 knots 26° E of N, 20-‐60 m – 0.4 knots 20° E of N, and 200-‐700 m – 1.6 knots 340° E of N.
Based on the positioning results from June 13, the comparison box tracks for the USV C-Worker -5 were redefined as: NE corner (28° 38.482’ N/88° 31.751’ W), SE corner (28° 38.147’ N/88° 31.744’ W), SW corner (28° 38.143’ N/88° 35.206’ W), and NW corner (28° 38.479’ N/88° 35.217’ W). The USV started the box tracks at 1354 hrs (turning the NW corner at 1520 hrs, the total perimeter of the box was 13 km) moving counter clockwise to insure the robust telemetry with the ship stationed to the south of the box. The comparison operational details are presented in Fig. 6-‐2.

Chapter 6. Surface PAM and Proceedings of the LADC-‐GEMM Visual Observation Tracks 2017 Gulf of Mexico Experiment
6-‐3
Figure 6-‐2: Screen shot of cross-‐platform comparison operation map. To synchronize the EARS clocks and assess the site-‐specific transmission losses,
scheduled pings were conducted at the Northern and Western sites using the EdgeTech deck box (see detailed ping schedule in Appendix 7-‐5). At 1410 hrs the first two pings were sent.
At 1510 hrs dolphin clicks and whistles were detected behind and ahead of the USV. Later, bottlenose deep water dolphins and pantropical spotted (white nose tip) dolphins showed up to play at the bow. At 1601 hrs the glider surfaced west of the SW corner (the pilot call was received but there were no website update and glider did not pick up a command and continued moving south surfacing at waypoint “glider 4” at 2015 hrs). At 2041 hrs two synchronizing pings were sent at 11 kHz (source depth 12 m).
The cross-‐platform comparison operation was continued overnight with the USV moving in a counterclockwise pattern along the box perimeter. The glider surfaced at waypoint “g5” at 0115 hrs (waypoint 30 on the website) and at waypoint “g6” at 0519 (15 m north of the northern box line, the USV was on the southern line at this time).
June 15, 2017 Sunny, 0-‐1 ft seas. Sperm and pilot whales where detected overnight. A ping was
sent early in the morning. At 0939 hrs the glider surfaced at waypoint “g7” 300 m away from the SW box corner with the next task to dive to the NE corner. At 1000 hrs the R/V Pelican started moving clockwise along a large circle (about 14 nmi in perimeter) at about 9 knots towing the Proteus’ volumetric array Tridon. At 1330 hrs the Tridon was put back on the back deck after being towed twice over a large perimeter circle. At 1440 hrs Danielle Greenhow spotted the glider surfaced at waypoint “g8”. At 1510 hrs a ping sequence was

Chapter 6. Surface PAM and Proceedings of the LADC-‐GEMM Visual Observation Tracks 2017 Gulf of Mexico Experiment
6-‐4
initiated 1 km SW of the center of the box as the ship started moving back to transects (waypoint 11 to continue SW on segments 23-‐24). The ship had to come out south of waypoint 11 due to the proximity of the Oceaneering ROV ship “Intervention-‐Two”. At 1815 hrs waypoint 24 was reached. An XBT probe was dropped near waypoint 24 at 1920 hrs (water depth of 1733 m). After a turn in the transect the Tridon-‐array was returned into the water. Later this evening fast and loud dolphins sounds were encountered, which seemed to follow and play with the Tridon-‐array. The array stopped working and was brought back on deck. After servicing, the array was returned back into the water and remained there overnight.
June 16, 2017 At 0500 hrs a 15-‐min long beaked whale encounter was detected, followed by a
sperm whale encounter later. The Tridon array had to be returned to deck because it had stopped working. At 0950 hrs the last CTD was casted near waypoint 27 (water depth of 540 m, surface water temperature was noticeably 1°C warmer). Afterwards the R/V Pelican continued to waypoint 3 to finish transects and ping at the Western site. At 1338 hrs at least three sperm whales were tracked acoustically and at 1344 hrs pinging at the Western Site had commenced (7 sites).
Operations at the transects ended when the final waypoint was reached at 1430 hrs on June 16, 2017. At 1440 hrs the last XBR was dropped at location 28° 21.5999’ N/89° 01.5640’ W and four sperm whales were spotted on the surface. At 1500 hrs the USV PAM array was reeled in using the automatic winch and public USV driving took place before it was roped in for towing back to port (Fig. 6-‐4) and the R/V Pelican was back on her way to port. After a ~100 nmi transit from the last survey waypoint near the Western Site, Expedition PE17-‐23 of the R/V Pelican ended at 0418 hrs on 17 June, with the first line ashore in Cocodrie, Louisiana. In total about 450 nmi of transects were completed during the cruise.
As we were finishing compiling this report, tropical storm Cindy passed near the deployed buoys. At 1900 hrs on June 20, 2017 the center of the storm was nearly stationary at 26.2 N/90.3 W with 45 mph winds. The marine weather forecast predicted SE to S 30-‐40 knots winds E of 90 W with 16-‐18 ft seas in E to SE swells.
6.2 Unmanned Surface Vehicle and Passive Acoustic Monitoring System
Detections with the passive acoustic monitoring system mounted on the USV are numerous and detailed in Table 6-‐1. The species spectral detection examples are shown in Figure 6-‐3.

Chapter 6. Surface PAM and Proceedings of the LADC-‐GEMM Visual Observation Tracks 2017 Gulf of Mexico Experiment
6-‐5

Chapter 6. Surface PAM and Proceedings of the LADC-‐GEMM Visual Observation Tracks 2017 Gulf of Mexico Experiment
6-‐6
Table 6-‐1: Whale and dolphin detections from the PAM system during the survey (10 -‐ 16 June), interrupted 12 June by operations at the Northern and Southern sites. .

Chapter 6. Surface PAM and Proceedings of the LADC-‐GEMM Visual Observation Tracks 2017 Gulf of Mexico Experiment
6-‐7
Figure 6-‐3: Two examples of real-‐time marine mammal detections from the USV-‐towed Seiche array in the PamGuard environment: three sperm whales (top) and clymene dolphins (bottom).

Chapter 6. Surface PAM and Proceedings of the LADC-‐GEMM Visual Observation Tracks 2017 Gulf of Mexico Experiment
6-‐8
Figure 6-‐4: USV C-Worker roped and on transit back to port. 6.3 Visual Observations
Visual observations were conducted during daylight hours mostly “on effort” with several of the shipboard science party participating with the aid of big eye binoculars (25 x 150) and a handheld Garmin GPS. Different species of marine mammals were observed on many occasions, a summary is provided in Table 6-‐2 and Figure 6-‐5 and detailed results presented in Appendix 7-‐2.

Chapter 6. Surface PAM and Proceedings of the LADC-‐GEMM Visual Observation Tracks 2017 Gulf of Mexico Experiment
6-‐9
Table 6-‐2: Visual observations during the surface PAM and visual observation survey (10 -‐ 16 June), interrupted 12 June by operations at the Northern and Southern sites.
Figure 6-‐5: Summary of the visual observations during the entire expedition. Number of sightings per species.
6.4 Oceanographic Measurements
The measurement program with the CTD and XBT during the ship tracks within and around the operational area is summarized in Table 6-‐3, locations are depicted in Figure 6-‐6. Although the general characteristics are similar to the measurements at the primary mooring sites, the physical and chemical data exhibit quite a bit of variability especially in the top 100 m (Figs. 6-‐7 and 6-‐8).

Chapter 6. Surface PAM and Proceedings of the LADC-‐GEMM Visual Observation Tracks 2017 Gulf of Mexico Experiment
6-‐10
Table. 6-‐3. Summary table of XBT and CTD deployments
Fig. 6-‐6. Map of XBT (red) and CTD (green) locations with respect to the primary mooring sites (yellow).

Chapter 6. Surface PAM and Proceedings of the LADC-‐GEMM Visual Observation Tracks 2017 Gulf of Mexico Experiment
6-‐11
Fig. 6-‐7. Profiles of fluorescence, oxygen, salinity, temperature and sound velocity at C3, C5, C6, C8 obtained with the CTD Underwater Unit.
During the ship tracks four XBT probes were dropped at various locations with the goal of measuring the water temperature versus depth, which is then used to calculate the sound velocity of the water column. Results from Sites X1 through X4 are presented in Figure 6-‐5 and the locations are shown on Figure 6-‐4 and in Table 6-‐3.

Chapter 6. Surface PAM and Proceedings of the LADC-‐GEMM Visual Observation Tracks 2017 Gulf of Mexico Experiment
6-‐12
Figure 6-‐8. Profiles of temperature and calculated sound speed from the XBT probe deployments (left to right: X1, X2, X3, and X4).

Appendix 1. Mooring informationMooring # Description Actual Latitude Actual Longitude EARS #1 Bottom Hydrophone EARS #2 Top Hydrophone Separation Release #1 Release #2 Beacon Beacon IMEI Strobe
1 North #1 28deg 38.1453' 88 deg 33.2844' 21 HTI short 18 15048-‐3 38 inches 50463 30873 E07-‐036 1810 E07-‐0332 North #2 28deg 38.1394' 88 deg 33.6792' 19 Q749-‐05 13 15048-‐7 39 inches 52862 30875 4010 E12-‐0133 North #3 28deg 38.4803' 88 deg 33.4911' 12 Q749-‐03 16 15048-‐1 38 inches 30876 52558 E07-‐035 8880 E12-‐0124 West 28deg 23.8355' 88 deg 59.2313' 14 Q749-‐04 17 HTI 523112 39 inches 30872 50462 E12-‐009 5990 E12-‐0115 South 28deg 27.6292' 88 deg 36.1685' 15 15048-‐4 20 HTI 523113 39 inches 50464 52557 E12-‐008 9910 NA

Appendix 7-‐2. Encounter Date Time Observers Ethogram Boat speed Weather Sea state Glare Cloud cover Depth Heading Lat Lon Species Cue Voyage type Dis to RV (nm) Pos to RV (degrees) Group size Adults Calves Juveniles Behaviors Equip Notes
1 6/9/17 8:34 AM DG, AW DG 9.2 kts FAC 1 1 1 1599 m 101.2 28 38.563 88 35.612 UD BA P 0.17 0 2-‐4 T, SS ASV in tow naked eye sighting2 6/9/17 9:58 AM DG, AW DG 2.8 kts FAC 1 1 1 1570 m 280 28 38.085 88 33.404 UD DF DT/DPL 0.6 100 L 2-‐4 T, FO, J/L, GS ASV w/array out3 6/9/17 10:23 AM DG, AW AW 2 kts FAC, HZ 1 1 1 1586 m 50 28 38.158 88 33.552 UD DF P 0.5 30 R 2-‐3 1-‐2 1 T, PS ASV w/array out4 6/9/17 2:21 PM DG, AH DG 0.2 kts FAC, HZ 2 1 2 1553 m 296.3 28 39.056 88 31.879 SP BL DPL 1.2 290 2-‐3 GS ASV w/array out5 6/9/17 2:58 PM AH, AW AH 0.2 kts FAC 2 2 2 1548 m 66.2 28 39.216 88 32.053 SP BL Other -‐ Idle 1.3 276 1-‐3 BL, GS, FOD ASV w/array out naked eye sighting6 6/9/17 3:18 PM DG, AW DG 0.8 kts FAC 2 2 1 1589 m 290 28 39.098 88 32.237 SP BL P 0.9 90 R 1-‐3 BL, T, GS, FOD ASV w/array out7 6/9/17 3:35 PM DG, AW AW 3.8 kts FAC 2 2 1 1589 m 265 28 38.391 88 32.482 SP BL DT 0.7 95 L 2 1 1 0 PS, T, BL, FOD ASV w/array out8 6/9/17 4:16 PM DG, AW AW 3.8 kts FAC 2 2 1 1600 m 265 28 38.691 88 33.633 SP BA DPT 1 55 R 3 3 0 0 T, GS, FOD ASV w/array out9 6/9/17 4:31 PM AH, AW AH 3.8 kts FAC 2 2 1 1600 m 265 28 38.455 88 33.348 SP BL DPT 2 20 R 2 2 0 0 BL, T, GS ASV w/array out ship turned/animals lost in the stern, small cargo ship nearby10 6/10/17 2:05 PM SH, AW AW 4.9 kts FAC 4 1 3 1600 m 270 28 17.388 88 59.727 UW BL DT 0.21 10 L 1 1 0 0 BL ASV w/array out 4 cargo ships nearby11 6/12/17 10:18 AM MF, DG MF 6.4 kts FAC 2 1 3 1575 m 192 28 37.420 88 33.512 PD BR DT 0 0 5-‐8 BR, GS ASV w/array out12 6/12/17 12:32 PM MF, SH MF 4.4 kts FAC, DR 3 0 3 1490 m 196 28 28.196 88 36.052 SP DF DT 0.18 310 1 BL, SS ASV w/array out13 6/12/17 1:20 PM DG, AW DG 2.6 kts DR 3 0 3 1483 m 150 28 28.058 88 36.059 SP BL DT/DPL 0.53 150 3-‐5 2-‐4 1 GS, PS, FOD, FLW, SOC ASV w/array out 2 adults and calf in echelon, other pair separated14 6/12/17 2:56 PM MF, SH MF 2.6 kts FAC 2.5 0 3 1486 m 30 28 27.761 88 35.667 SP BL DT 0.85 50 R 2 GS, T ASV w/array out15 6/12/17 3:42 PM DG, AW AW 4.3 kts FAC 3 0 4 1500 m 9.6 28 27.761 88 35.667 SP BL DT 0.7 90 R 1 BL, SS, T ASV w/array out16 6/12/17 5:45 PM AH, CP AH 4.6 kts FAC 4 0 3 1499 m 26.9 28 39.456 88 30.835 PD BA DT 0 0 15-‐20 1 1GS, VEN, SIS, SOC, P,J/L, BR, VOC ASV w/array out17 6/13/17 2:10 PM AH, AW AH 2.6 kts FAC 2 1 2 1550 m 332 28 48.983 88 04.990 SF DF DT 2.3 301 15-‐20 BL, GS, SOC, LO ASV w/array out18 6/13/17 4:14 PM SH, DG SH 4.3 kts FAC 2 2 2 1214 m 307 28 54.633 88 07.925 UW BA DT 0.14 5 1 LO ASV w/array out likely sperm whale based on size and vocalizations recorded on array19 6/13/17 4:37 PM AW, DG AW 3.8 kts FAC 2.5 2 2 1500 m 309.1 28 55.726 88 09.229 SF BL DT 3.7 / 0.39 285 / 40 6-‐9 / 15-‐25 BL, T, BR, L ASV w/array out two groups simultaneously
206/14/17 3:09 PM
AW, DG AH 0.3 kts FAC 2 1 2 1577 m 342 28 37.766 88 33.545 PD/BND DF Other -‐ Idle 0.48 30 L / 45 R15-‐25/ 8-‐10 1/1
J/L, L/R, M, T, SOC, GS, PS, FUS, SIS, AWB, SP
ASV w/array outmultiple subgroups joined together (mixed species); PD came to bow but BND continued travel
21 6/14/17 6:00 PM MF, AW AW 0.54 kts FAC 2 2 2 1571 m 242.6 28 38.295 88 33.193 UD DF DT 1.1 50 R 2-‐4 T ASV w/array out only surfaced once22 6/14/17 7:11 PM DG, AW AW 0 FAC 2 2 1 1580 m 226.6 28 37.942 88 33.319 UD BI Other -‐ Idle 3.7 15 R 5-‐25 J/L, T ASV w/array out23 6/15/17 12:10 PM DG, AW AW 9.1 kts FAC 1 0 3 1398 m 42.1 28 38.316 88 36.522 UD BA DT 2 35 L 1 J/L ASV w/array out24 6/15/17 12:42 PM AH, SH SH 9.5 kts FAC 1 0 2 1541 m 90 28 39.528 88 31.512 UW BA DT 2.6 60 R 1-‐2 LO ASV w/array out originally possible sperm whale, acoustic detections make it likely pilot whale25 6/15/17 3:13 PM AH, SH SH 1 kt FAC 1 1 2 1589 m 103 28 38.461 88 32.847 UW BL DT 0.46 0 1 BL ASV w/array out saw by off effort crew, only once26 6/16/17 7:13 AM SH, MF SH 5.7 kts FAC 2 0 1 1000 m 170 28 28.789 88 54.048 UD BA DT 0.5 0 1-‐10 J/L ASV w/array out Stenellids 27 6/16/17 12:15 PM DG, AW DG 5.7 kts FAC 2 1 2 838 m 170 28 30.240 88 02.048 SP BL DT 1.85 354 3-‐4 BL, T, FOD, FID ASV w/array out 1 cargo ship and 3 fishing boats; birds nearby28 6/16/17 2:01 PM MF, AW AW 2.1 kts FAC 2 3 1 1050 m 222.5 28 23.151 88 59.884 SP BL DT 1.7 332 2 BL, FOD ASV w/array out 1 cargo ship and 1 fishing boat; 2 animals about 0.5 miles apart
For abbreviations and ethogram codes see Appendix 3.

Environmental Data: Sightings:
Sea State: 0 glassy mirror-like
Voyage
Type: DT Definite Track/Transect
Species
codes: RT Rough Toothed Dolphin
0.5 faintest ripples H Hunch BD Bottlenose Dolphin
1 scale ripples P Passage FD Fraser's Dolphin
2 small wavelets DPL Deployment PD Pantropical Spotted Dolphin
3 occassional whitecap OTH Other AS Atlantic Spotted Dolphin
3.5 persistent whitecap CD Clymene Dolphin
4 numerous whitecaps Cue type: DF Dorsal Fin SD Striped Dolphin
5 many whitecap/spray BA Back SN Spinner Dolphin
6 too rough BI Birds RD Risso's Dolphin
BL Blow OC Orca
Glare: 0 none BR Breach FO False Killer Whale
1 litte, non-interferring V Vocalize PO Pygmy Killer Whale
2 some, could interfere S Sound SP Sperm Whale
3 much, interferes SM Smell PS Pygmy Sperm Whale
SP Splash DS Dwarf Sperm Whale
Weather: FA Fair U Underwater SF Short-finned Pilot Whale
FAC Fair w/ cloud cover BO Boil BW Bryde's/Eden's Whale
H Haze FI Fish MH Melon-headed Whale
FO Fog AWB Associated w/ boat CB Cuvier's Beaked Whale
M Mist T Traveling GB Gervais' Beaked Whale
DR Drizzle OTH Other DB Dense (Blainville) Beaked Whale
R Rain SBW Sowerby's Beaked Whale
ST Storm HB Humpack Whale
BLU Blue Whale
Cloud cover: 0 No clouds Visibility: 1 >5 nm MW Minke Whale
1 Few clouds 2 >2 <5 nm FIN Fin Whale
2 Partly cloudy 3 <2 nm SEI Sei Whale
3 Mostly cloudy 4 Rain / Fog UD/UWUnid Dolphin/Whale
4 Overcast U Unknown
T Turtle
M Manatee
SH Shark

Behavior: SS Solo Swim
Birds: AU Auk PS Pair swim Boats/Ships: 1 Sailboat
AN Anhinga GS Group Swim 2 Small Sailboat (5ft-10ft)
PE Pelican VEN Ventral Swim 3 Medium Sailboat (10ft-25ft)
GA Gannet SIS Side swim 4 Large Sailboat (>25ft)
GU Gull FOD Fluke out dive 5 Recreation
KI Kittiwake FID Fluke in dive 6 Small Recreation (5ft-10ft)
LO Loon FUS Fluke slap 7 Medium Recreation (10ft-25ft)
EG Egret FLW Fluke wave 8 Large Recreation (>25ft)
CO Cormorants PCS Pec slap 9 Fishing
HE Heron PWA Pec wave 10 Small Fishing (5ft-10ft)
MI Misc. CHIN Chin slap 11 Medium Fishing (10ft-25ft)
SH Shag FO Foraging 12 Large Fishing (>25ft)
SK Skua FT Fish toss 13 Shrimp Boat
SW Shearwater FK Fish kick 14 Barge/Shipping
TE Tern SOC Social 15 Ferry
WF Waterfowl GSB Group social ball 16 Tug
R/T Rub/tactile 17 Other
SEX Sexual behavior
CHS Chase
AVF Avoid/Flee
B/R Bite/Rake
MOU Mouthing
BUB Bubbles
VOC Vocalize
CHUF Chuffing
PWO Play w/ object
OTH Other

Appendix 7-‐4.
Extracting Excel compatible files from CTD files
The CTD software generates four files per cast: .bl (bottle information for water sampling), .hdr, .hex (the data in hex format), .XMLCON (the configuration of the CTD). To extract the data in an Excel compatible format, they first have to be converted into ASCII with the “Data conversion” module of the SBE Data Processing software and then averaged per meter with the “Bin Average” module.
1. Open the SBE Data Processing software
2. Run the “Data conversion” module
Not sure what the Program Setup file is, but it just appears. The instrument configuration file .XMLCON is part of the CTD output files and can be selected from the directory with the data. The input file (data file) is the .hex file from the data directory.

In the Data Setup module under “Select Output Variables” select the variables to be extracted, in our case Depth (m), Fluorescence (ug/l), Conductivity (S/m), Sound velocity (m/s), Temperature (C), Salinity (PSU).
Hit Start Process and a .CNV file is generated in the output directory.
3. Exit the Data Conversion module and run the “Bin Average” module. This module uses the file created by the Data Conversion module, the .CNV file, and averages the about 80 readings taken per meter into one value per meter.
4. Select input and output directories and the file to be averaged.

In the Data Setup tab, make sure the bin type is “Depth” and the bin size is 1. “Start Process” and a _binavg file compatible with Excel is generated.

Appendix 7-‐5. Ping scheduleDate Time (local) Latitude Longitude Water depth (m) Notes
6/14/17 14:10 28° 37.9418' 88° 33.3337'6/14/17 28° 37.9434' 88° 33.3324'6/14/17 20:41 28° 37.9449' 88° 33.1421'6/14/17 28° 37.9454' 88° 33.1418'6/15/17 6:26 28° 37.8759' 88° 33.4950' 2 pings 20 s apart at 11 kHz, source depth 12 m (39 ft)6/15/17 6:27 28° 37.8791' 88° 33.4933'6/15/17 15:10 28° 38.0698' 88° 34.0703' 1562 SW corner of the box, 1 km away from the triangle center, ASV is in front of R/V Pelican 1 km of the baw 6/15/17 28° 38.0716' 88° 34.0660'6/15/17 15:20 28° 38.1729' 88° 33.7544' 1568 500 m away from the triangle center6/15/17 28° 38.1745' 88° 33.7483'6/15/17 15:25 28° 38.2864' 88° 33.4626' 1570 center of the triangle6/15/17 28° 38.2870' 88° 33.4615'6/15/17 15:29 28° 38.3612' 88° 33.1734' 1573 500 m away from the triangle center6/15/17 28° 38.3623' 88° 33.1650'6/15/17 15:33 28° 38.4570' 88° 32.8718' 1577 1000 m away from the center6/15/17 28° 38.4588' 88° 32.8620'6/15/17 15:40 28° 38.6552' 88° 32.2827' 1579 2000 m away from the center6/15/17 28° 38.6590' 88° 32.2763'6/15/17 15:46 28° 38.8351' 88° 31.7368' 1575 3000 m away6/15/17 28° 38.8351' 88° 31.7368'6/15/17 15:53 28° 38.9974' 88° 31.1537' 1569 4000 m away6/15/17 28° 38.9990' 88° 31.1479'6/15/17 16:00 28° 39.1695' 88° 30.5682' 1554 5000 m away, moving toward transect point 116/15/17 28° 39.1705' 88° 30.5650'
Western site, sperm whales are tracked simultaneously6/16/17 13:44 28° 23.8280' 88° 59.2193' 1037 Over the mooring6/16/17 28° 23.8269' 88° 59.2176'6/16/17 13:51 28° 23.6196' 88° 59.4168' 1034 500 m away6/16/17 28° 23.6175' 88° 59.4162'6/16/17 13:57 28° 23.4007' 88° 59.6181' 1037 1000 m away6/16/17 28° 23.3990' 88° 59.6176'6/16/17 14:07 28° 23.0039' 89° 00.0378'6/16/17 28° 23.0026' 89° 00.0375' 1029 2000 m 6/16/17 14:16 28° 22.6045' 89° 00.4480' 1038 3000 m 6/16/17 28° 22.6005' 89° 00.4466'6/16/17 14:24 28° 22.2357' 89° 00.9063' 1036 4000 m6/16/17 28° 22.2344' 89° 00.9046'6/16/17 14:33 28° 21.8492' 89° 01.3724' 1019 5000 m6/16/17 28° 21.8484' 89° 01.3713'