Embed Size (px)
Citation preview
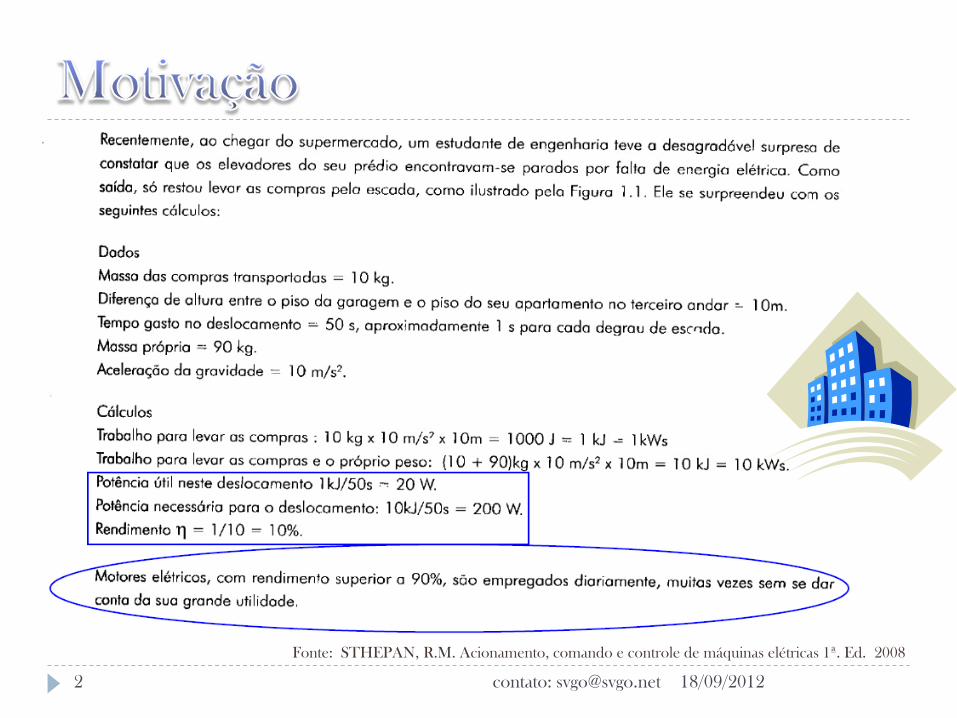
18/09/2012 contato: [email protected] 2
Fonte: STHEPAN, R.M. Acionamento, comando e controle de máquinas elétricas 1ª. Ed. 2008
18/09/2012 contato: [email protected] 3
Fonte: STHEPAN, R.M. Acionamento, comando e controle de máquinas elétricas 1ª. Ed. 2008
Porque usar motores elétricos? O aperfeiçoamento das máquinas a vapor pelo cientista escocês Watt, no
final do século XVIII, permitiu ao homem a libertação do trabalho braçal. O rendimento destas máquinas, da ordem de 30%, já era bastante superior ao rendimento humano, o que justifica o seu grande sucesso.
Os motores elétricos que começaram a ser empregados no final do século XIX, representaram um grande avanço nos diversos campos da atividade humana.
Os avanços na área de materiais elétricos, magnéticos e semicondutores, predominantemente no final do século XX, colocam os motores elétricos em uma posição de destaque nas aplicações industriais, comerciais e residenciais.
Quando os resultados acima são comparados com o consumo mensal de energia de muitas residências, superior a 100 kWh = 3,6 x 105 kWs, constata-se quão insignificante é a capacidade do homem sem a sua inteligência e talvez, também, o quanto o homem do século XXI desperdiça energia.
18/09/2012 contato: [email protected] 4
Por que usar motores elétricos? Além disso, deve-se destacar que, quando há disponibilidade de
energia elétrica, os motores elétricos representam normalmente a melhor opção para a execução de movimentos mecânicos cobrindo uma ampla faixa de potências, de mW até MW.
Algumas exceções, como os motores de brocas de dentistas, empregam pressão do ar e de fluidos, por questões de tamanho e segurança. No entanto, quando se considera o volume ocupado pelos compressores, necessários no acionamento destes motores, verifica-se que o espaço necessário para um acionamento puramente elétrico é sempre menor que as demais opções.
Por outro lado, os automóveis e outros veículos de transporte, que se valem de motores a combustão, só não foram ainda substituídos por acionamentos integralmente elétricos pelo fato da energia elétrica nestas aplicações móveis ainda depender de pesadas e caras baterias.
Fonte: STHEPAN, R.M. Acionamento, comando e controle de máquinas elétricas 1ª. Ed. 2008
18/09/2012 contato: [email protected] 5
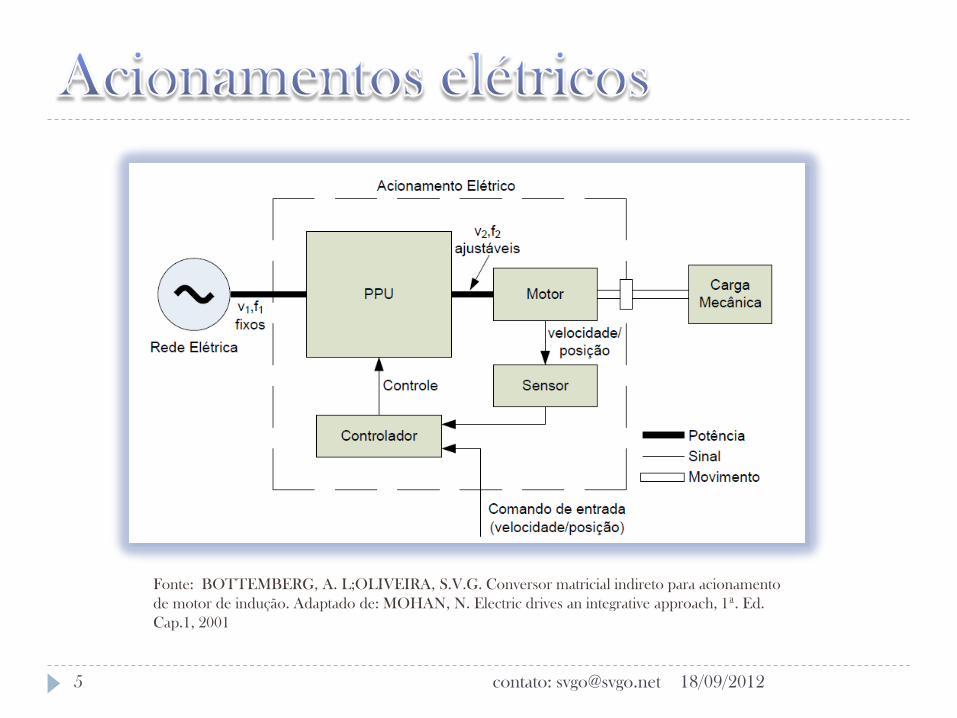
Fonte: BOTTEMBERG, A. L;OLIVEIRA, S.V.G. Conversor matricial indireto para acionamento de motor de indução. Adaptado de: MOHAN, N. Electric drives an integrative approach, 1ª. Ed. Cap.1, 2001

18/09/2012 contato: [email protected] 7
Fonte: MOHAN, N. Electric drives an integrative approach, 1ª. Ed. Cap.1, 2001
18/09/2012 contato: [email protected] 8
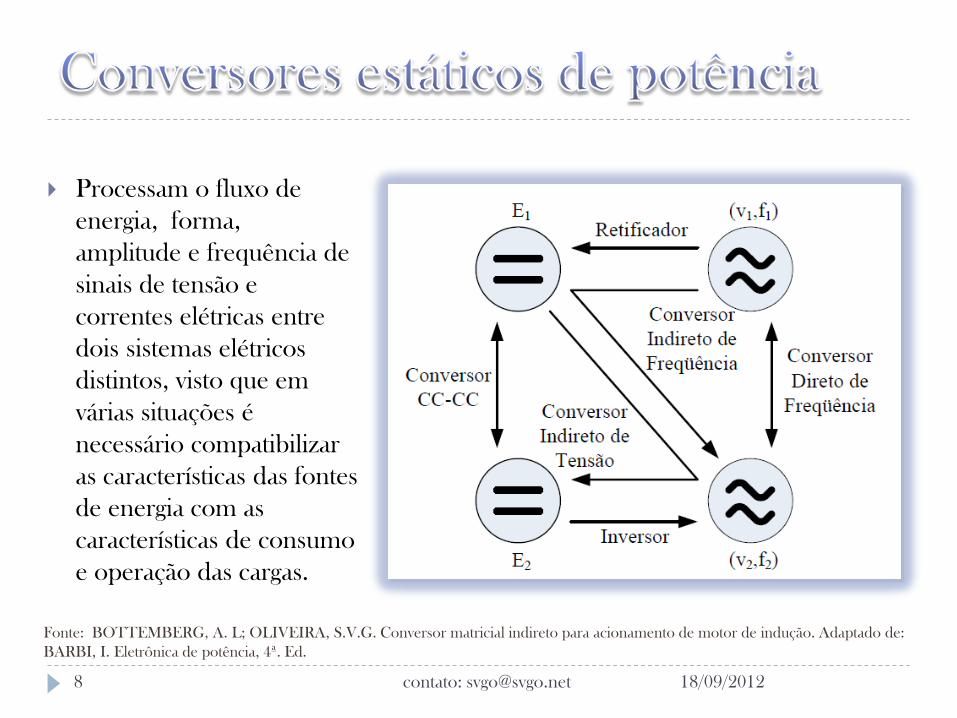
Processam o fluxo de energia, forma, amplitude e frequência de sinais de tensão e correntes elétricas entre dois sistemas elétricos distintos, visto que em várias situações é necessário compatibilizar as características das fontes de energia com as características de consumo e operação das cargas.
Fonte: BOTTEMBERG, A. L; OLIVEIRA, S.V.G. Conversor matricial indireto para acionamento de motor de indução. Adaptado de: BARBI, I. Eletrônica de potência, 4ª. Ed.

18/09/2012 contato: [email protected] 9
Fonte: KASMIERKOWSKI, M. P. et al.. High performance drives. In: IEEE Industrial electronics magazine. September 2011.

Fonte: MOHAN, N. Electric drives an integrative approach, 1ª. Ed. Cap.4, 2001
18/09/2012 contato: [email protected] 10
18/09/2012 contato: [email protected] 11
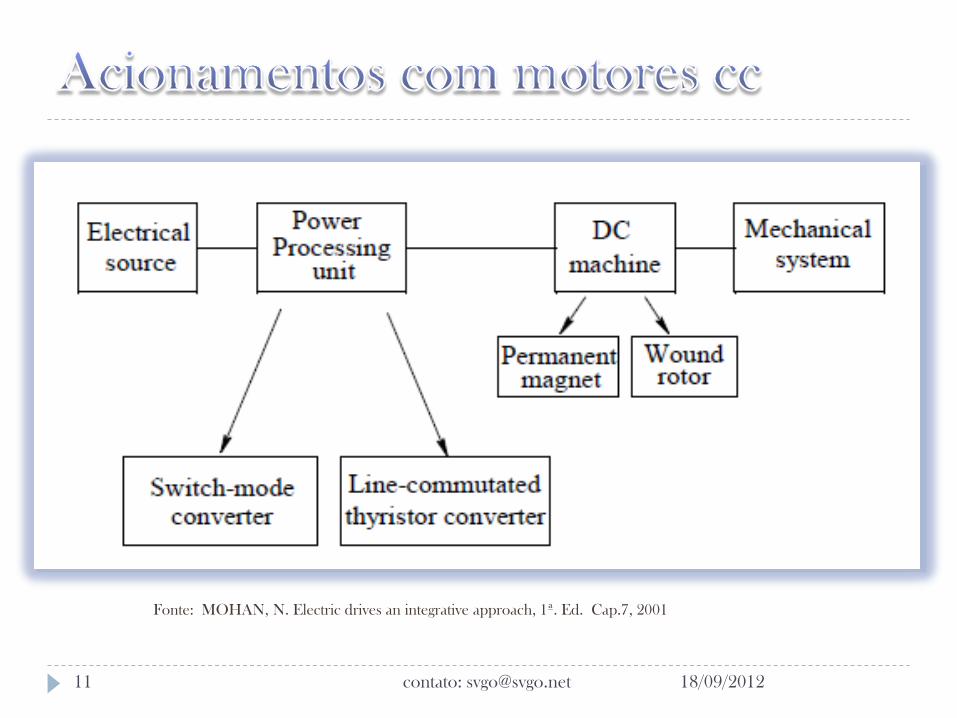
Fonte: MOHAN, N. Electric drives an integrative approach, 1ª. Ed. Cap.7, 2001

18/09/2012 contato: [email protected] 12
Fonte: MOHAN, N. Electric drives an integrative approach, 1ª. Ed. Cap.7, 2001

18/09/2012 contato: [email protected] 13
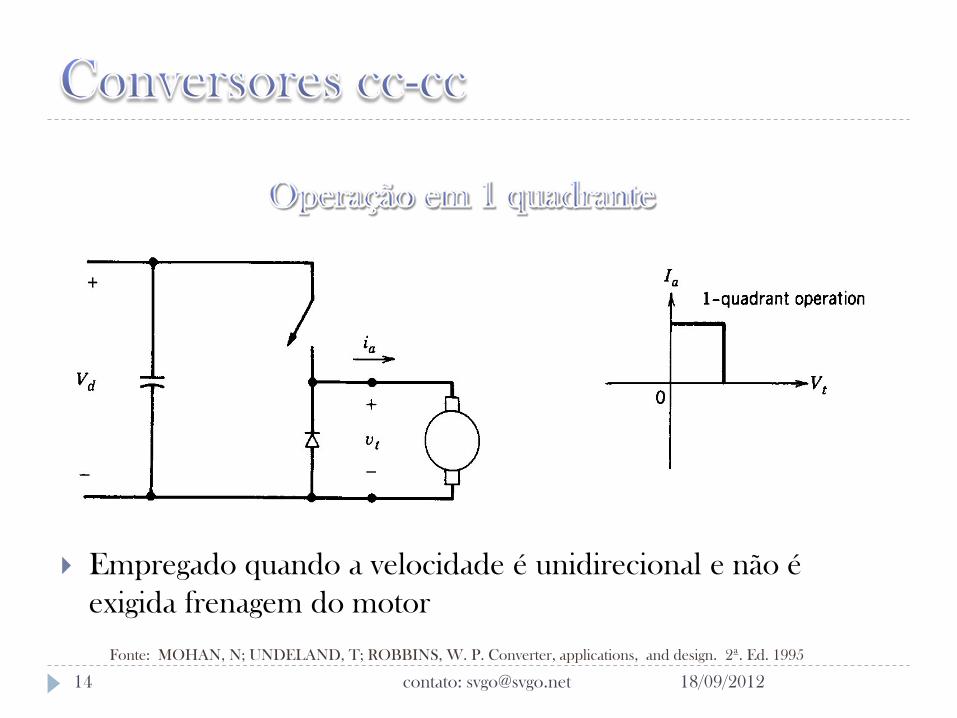
Empregado quando a velocidade é unidirecional e não é exigida frenagem do motor
Fonte: MOHAN, N; UNDELAND, T; ROBBINS, W. P. Converter, applications, and design. 2ª. Ed. 1995
18/09/2012 contato: [email protected] 14
Empregado quando a velocidade é unidirecional e não é exigida frenagem do motor
Fonte: MOHAN, N; UNDELAND, T; ROBBINS, W. P. Converter, applications, and design. 2ª. Ed. 1995

Empregado quando a velocidade é unidirecional e é exigida frenagem do motor.
18/09/2012 contato: [email protected] 15
Fonte: MOHAN, N; UNDELAND, T; ROBBINS, W. P. Converter, applications, and design. 2ª. Ed. 1995
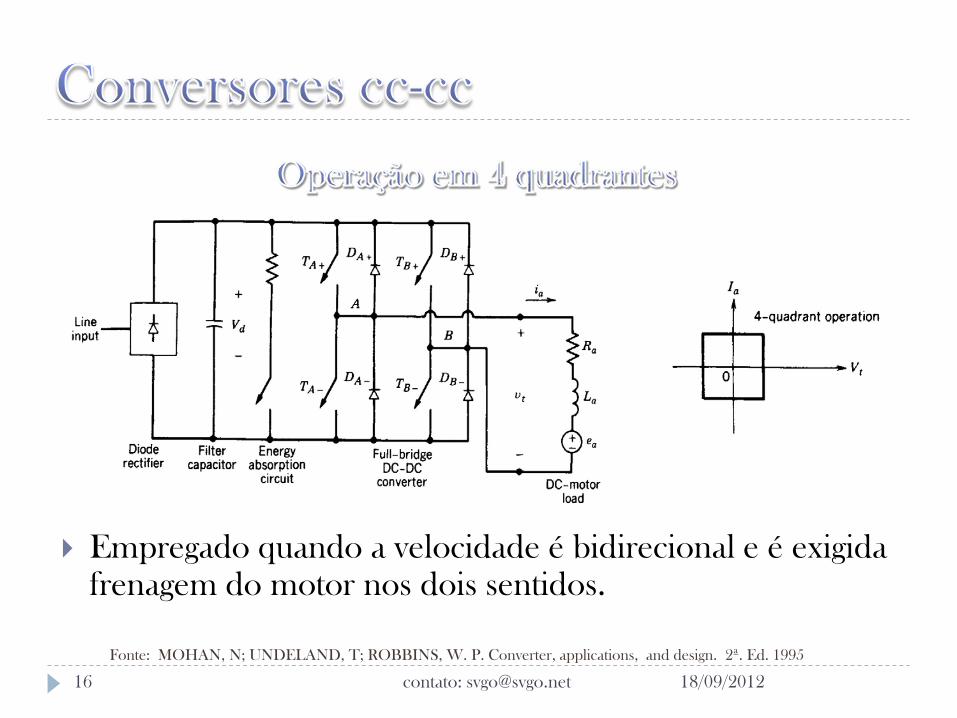
Empregado quando a velocidade é bidirecional e é exigida frenagem do motor nos dois sentidos.
18/09/2012 contato: [email protected] 16
Fonte: MOHAN, N; UNDELAND, T; ROBBINS, W. P. Converter, applications, and design. 2ª. Ed. 1995
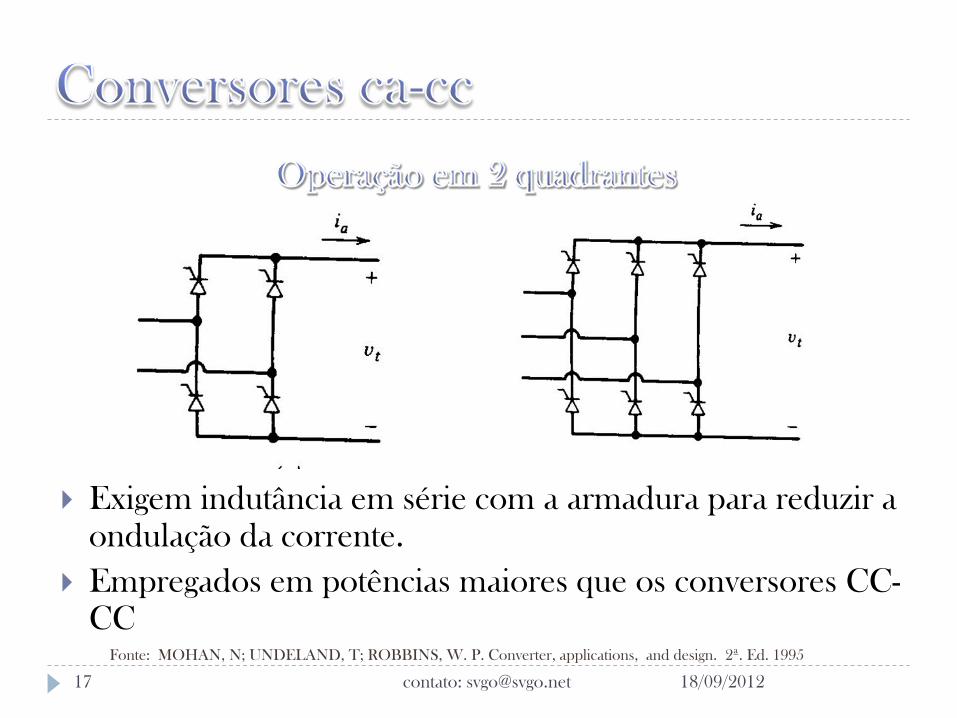
Exigem indutância em série com a armadura para reduzir a ondulação da corrente.
Empregados em potências maiores que os conversores CC-CC
18/09/2012 contato: [email protected] 17
Fonte: MOHAN, N; UNDELAND, T; ROBBINS, W. P. Converter, applications, and design. 2ª. Ed. 1995
18/09/2012 contato: [email protected] 18
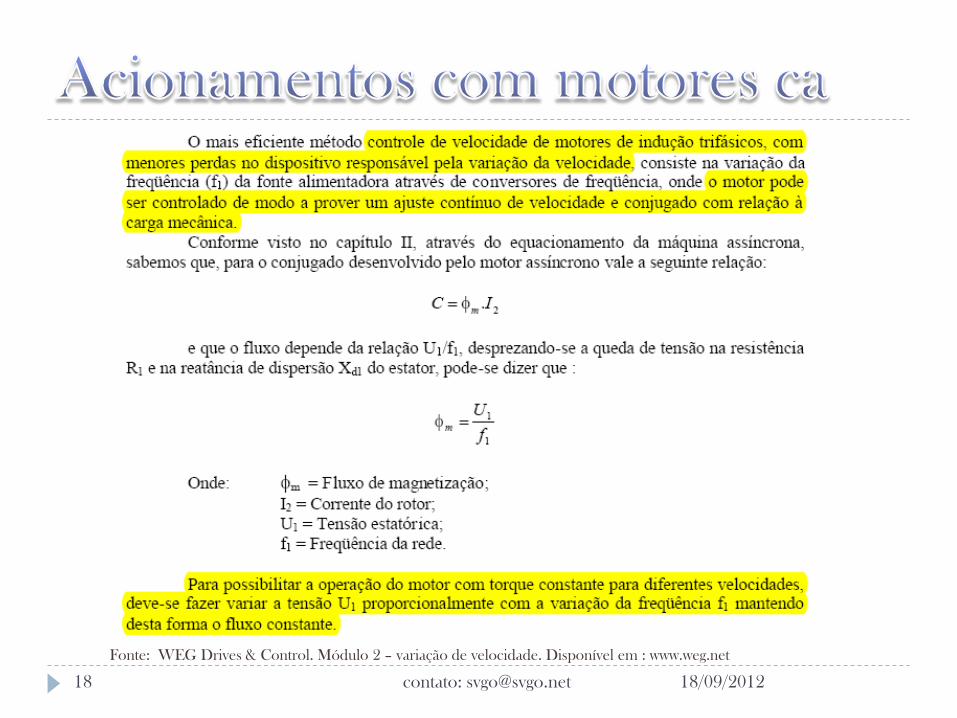
Fonte: WEG Drives & Control. Módulo 2 – variação de velocidade. Disponível em : www.weg.net
18/09/2012 contato: [email protected] 19
18/09/2012 contato: [email protected] 20
18/09/2012 contato: [email protected] 21

18/09/2012 contato: [email protected] 22
18/09/2012 contato: [email protected] 23
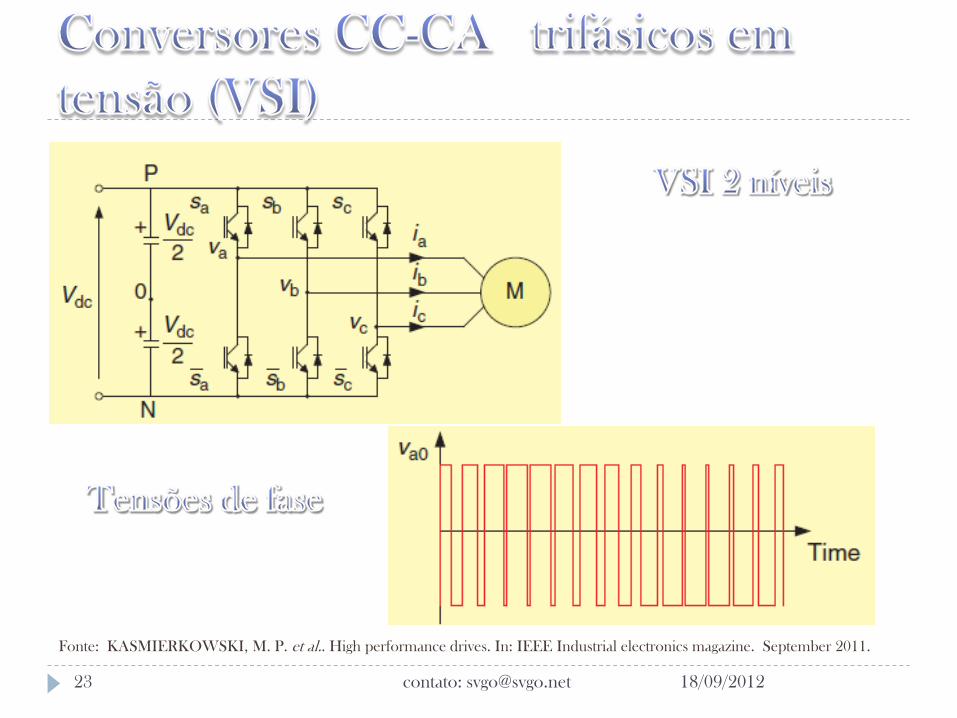
Fonte: KASMIERKOWSKI, M. P. et al.. High performance drives. In: IEEE Industrial electronics magazine. September 2011.
18/09/2012 contato: [email protected] 24
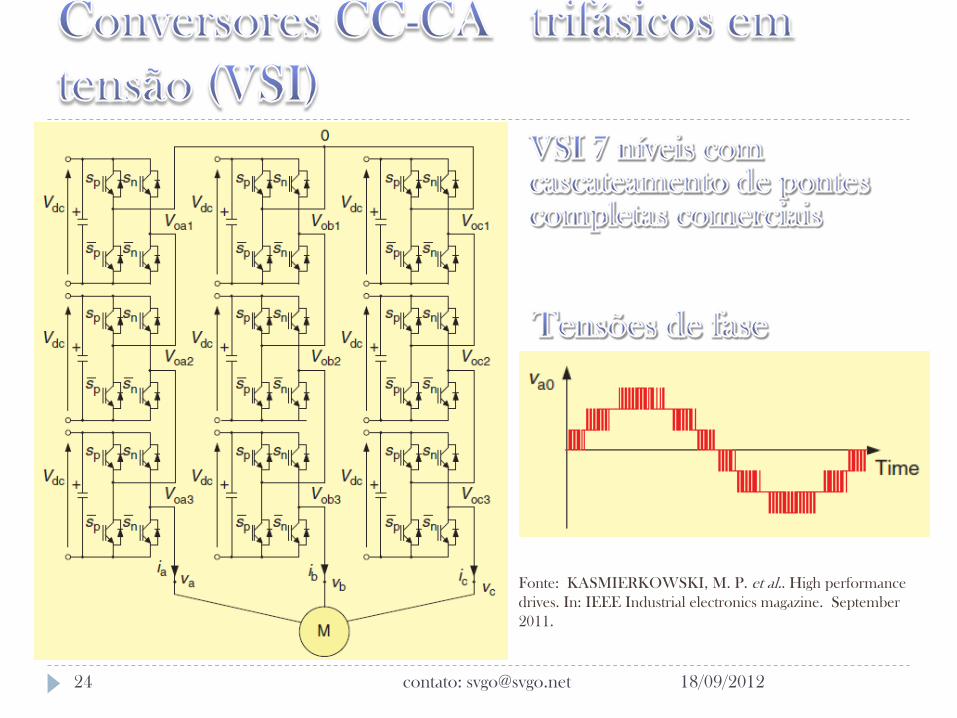
Fonte: KASMIERKOWSKI, M. P. et al.. High performance drives. In: IEEE Industrial electronics magazine. September 2011.

18/09/2012 contato: [email protected] 25
Fonte: KASMIERKOWSKI, M. P. et al.. High performance drives. In: IEEE Industrial electronics magazine. September 2011.
18/09/2012 contato: [email protected] 26
Desde a revolução industrial a sociedade vem utilizando equipamentos com funções especificas para a realização de tarefas outrora manualmente desempenhadas.
Dentre estes, motores elétricos cada vez mais são em processos onde a fonte de energia é elétrica e o processo requer alguma atuação mecânica.
Os acionamentos modernos de motores elétricos exigem desempenhos dinâmicos cada vez melhores, aumentando o grau de automação dos processos, industriais, comerciais e residenciais.
Para propiciar estas e outras características técnicas, topologias de conversores estáticos cada vez mais complexas e versáteis veem sendo propostas na literatura.
Nesta aula foram apresentadas as topologias clássicas de conversores estáticos aplicados no acionamento de motores, tanto de corrente contínua quanto de corrente alternada.
Nos acionamentos de motores de cc, podem ser utilizados conversores semicontrolados a tiristores (ca-cc), bem como, conversores totalmente controlados empregando transistores de potência (cc-cc).

18/09/2012 contato: [email protected] 27
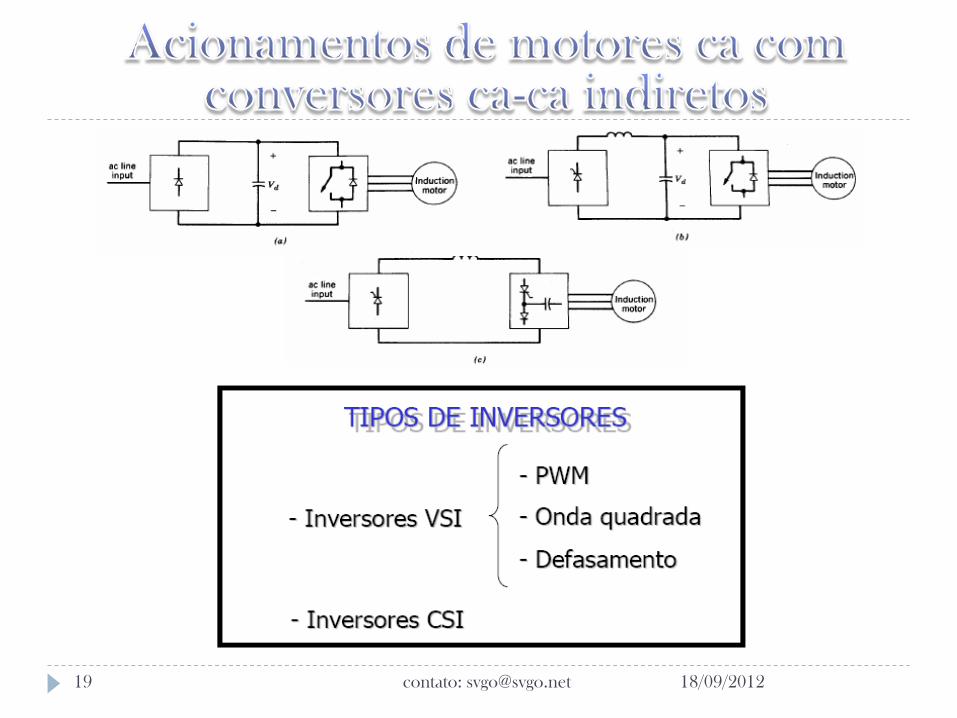
Nos acionamentos de motores de ca, os conversores podem ser ca-ca diretos, onde não existe elementos acumuladores de energia na interface entre a fonte de energia e a carga ou, ca-ca indiretos, onde há, na interface elementos armazenadores de energia de grande volume como indutores e/ou capacitores.
A natureza do circuito de acumulação de energia (por tensão ou por corrente) determina outra classificação aos conversores ca-ca, quanto à natureza da acumulação, se capacitiva, os conversores ca-cc-ca serão do tipo VSI, se indutiva, os conversores ca-cc-ca serão do tipo CSI.
O conhecimento, o entendimento e o desenvolvimentos das topologias clássicas, propiciará embasamento teórico para que o aluno iniciante nos acionamentos elétricos, entenda e desenvolva topologias mais complexas como as do tipo multiníveis e matriciais.

18/09/2012 contato: [email protected] 28
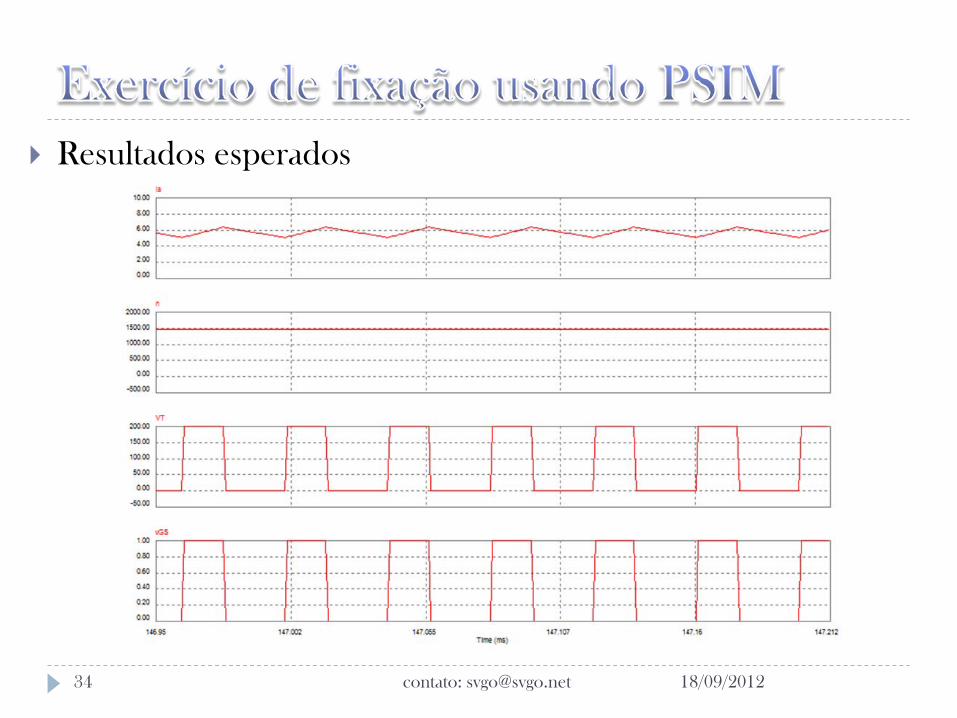
Acionamento de um motor de CC utilizando um conversor CC-CC para operação em 1 quadrante O objetivo da aula é verificar as características necessárias de um conversor CC-CC para que
este acione um motor de corrente contínua, com excitação independente e os seguintes parâmetros característicos: Ra= 0,35Ω, La=1,5mH, J=0.02 kg.m2, Rf= 150Ω, Vf=15V; T= 3 N.m, kE=0,5 V/rad/s, kT=0,5 N.m/A. Deseja-se que o motor rode com uma velocidade de n = 1500 rpm.
Dados do conversor CC-CC: Tensão de alimentação: E=200VCC Tensão média de saída: V_T=E_a+R_a I_a Frequências de comutação: 25 kHz
Análise teórica Força Eletromotriz: E_a = k_E ω_n Velocidade angular: ω_n = n π/30=1500 π/30 = 50π rad/s E_a=0,5 V/(rad/s)∙50π rad/s=78,54V Tensão terminal: V_T = E_a+R_a I_a = V_T=78,54V+0,35Ω∙6A=80,64V Corrente de armadura: I_a = T/k_T = (3N.m)/(0,5 N.m/A)=6A Razão cíclica do conversor: D=V_T/E = 80,64V/200V = 0,403
Conversão razão cíclica em ângulo: D = 1 →360° @ D= 0,403 →145,15°
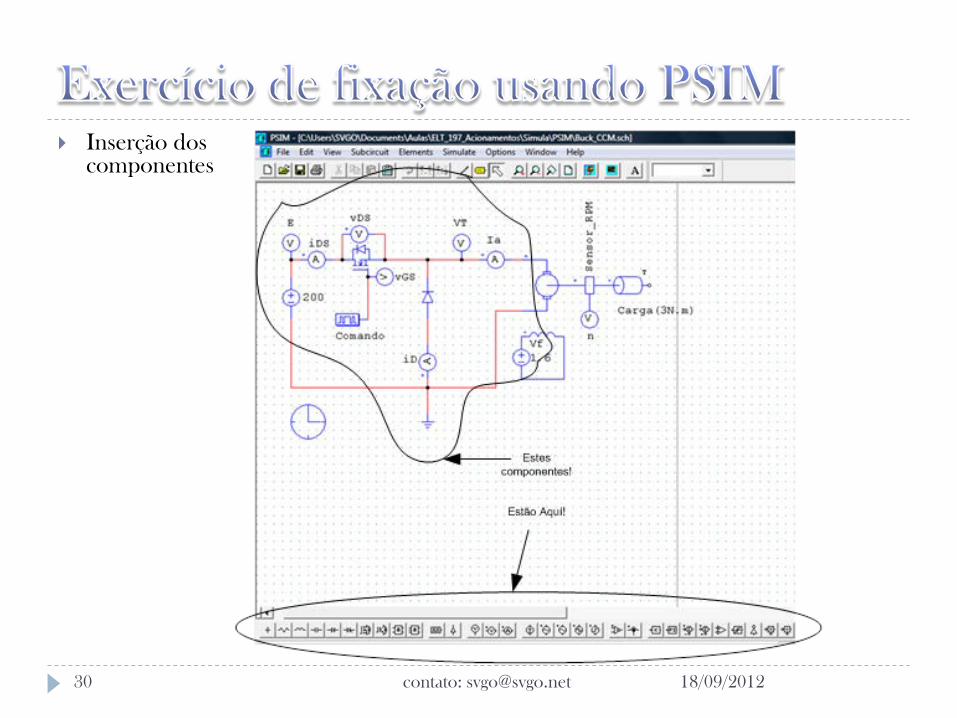
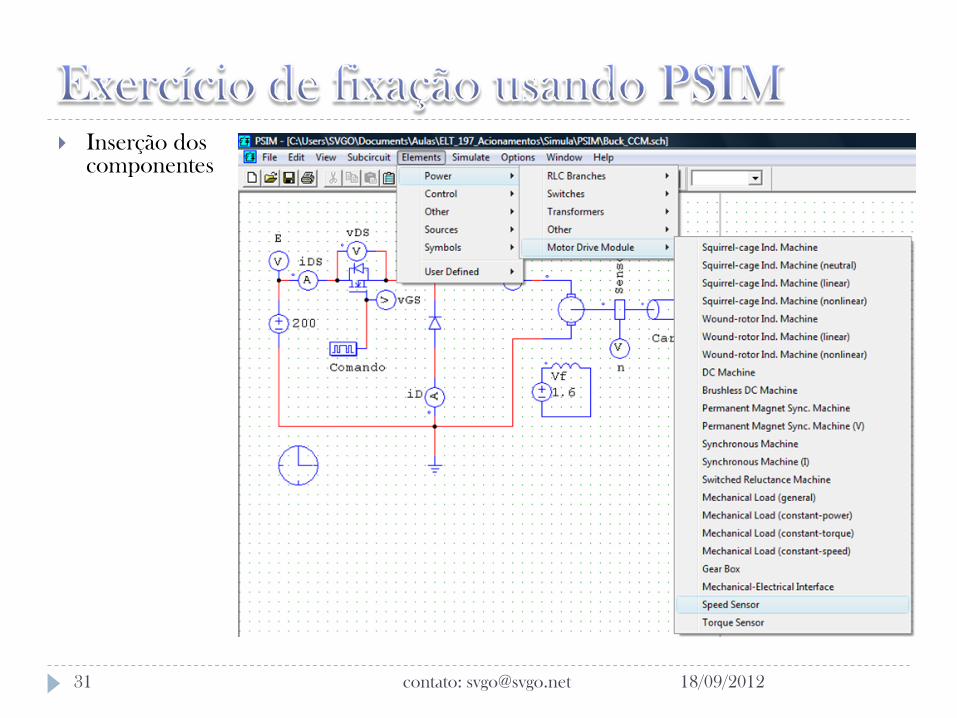
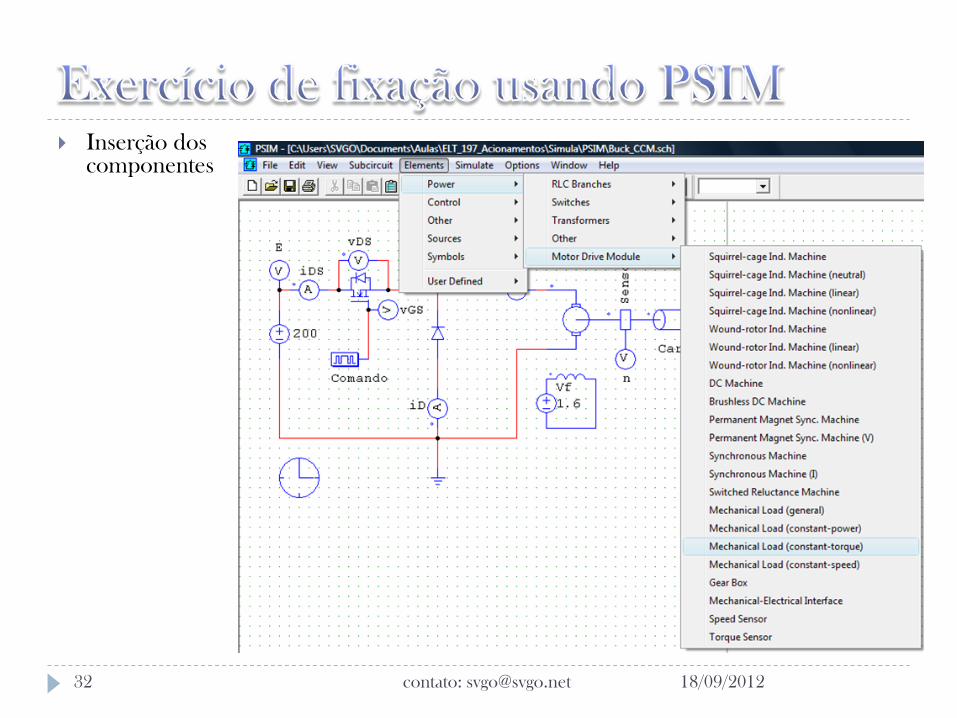
Estes dados serão usados no bloco COMANDO para determinar a função de chaveamento do MOSFET do conversor BUCK, feita pelo componente (GATING)