Embed Size (px)
Citation preview

1
CMEMS Service Evolution 21-SE-CALL1
QA best practices and protocols
on QC for radial and total HF
radar data (D3.1)
March 6th, 2017

QA best practices and protocols on QC for radial and total HF radar data
2
FOREWORD
This document is the deliverable D.3.1 from INCREASE WP3. In the last months, there
has been intense exchange within the European HFR experts for the definition of
standards QA and QC procedures. This progress has been achieved in collaboration
with JERICO-Next project and has been shared and supported by the HF radar
community through INCREASE project efforts (INCREASE HFR Experts Workshop,
September 2016). In this context, WP3 will make a step forward, focusing on the
practical aspects linked to their implementation to real data. The main goal of this
deliverable is to provide a demonstration on the application of these procedures, which
will be the basis for the development of INCREASE HFR basic products (M3.1).

QA best practices and protocols on QC for radial and total HF radar data
3
Abbreviations list
APM: Antenna Pattern Measurement
BF: Beam Forming
BoB: Bay of Biscay
CMEMS: Copernicus Marine Environment Monitoring Service
CODAR: Coastal Ocean Dynamics Application Radar
DF: Direction Finding
GDOP: Geometric Dilution Of Precision
GoM: Gulf of Manfredonia
HFR: High Frequency Radar
JERICO-NEXT: Joint European Research Infrastructure network for Coastal
Observatory – Novel European eXpertise for coastal observaTories
NaN: Not a Number
OMA: Open-boundary Modal Analysis
QA/QC: Quality Assessment/Quality Control
QARTOD: Quality Assurance/Quality Control of Real-Time Oceanographic Data
SDN: SeaDataNet
SNR: Signal to Noise Ratios
TAC: Thematic Assembly Centres
WERA: WavE Radar
WP: Work Package

QA best practices and protocols on QC for radial and total HF radar data
4
Index
Abbreviations list ................................................................................................................................ 3
1 List of Figures .............................................................................................................................. 6
2 Contributing Experts ................................................................................................................. 9
3 Introduction ................................................................................................................................. 10
3.1 Objectives of INCREASE project .............................................................................. 10
3.2 Objectives of this report .......................................................................................... 10
4 QA recommendations ............................................................................................................. 11
5 Data, metadata and QC standards .................................................................................... 17
5.1.1 QC tests for radial and total data ................................................................... 18
5.1.2 Demonstration on QC tests application to two real cases .......................... 19
6 Implementation of QC tests to radial data ..................................................................... 23
6.1 Syntax Test .............................................................................................................. 23
6.1.1 Definition and computation .............................................................................. 23
6.2 Over-water .............................................................................................................. 23
6.2.1 Definition and computation .............................................................................. 23
6.2.2 Application ......................................................................................................... 24
6.3 Velocity threshold ................................................................................................... 25
6.3.1 Definition and computation .............................................................................. 25
6.3.2 Application ......................................................................................................... 25
6.4 Variance threshold .................................................................................................. 29
6.4.1 Definition and computation .............................................................................. 29
6.4.2 Application ......................................................................................................... 30
6.5 Average radial bearing ............................................................................................ 32
6.5.1 Definition and computation .............................................................................. 32
6.5.2 Application ......................................................................................................... 33
6.6 Median filter ............................................................................................................ 34
6.6.1 Definition and computation .............................................................................. 34
6.6.2 Application ......................................................................................................... 35

QA best practices and protocols on QC for radial and total HF radar data
5
7 Implementation of QC tests to total data ....................................................................... 39
7.1 Syntax Test .............................................................................................................. 39
7.1.1 Definition and computation .............................................................................. 39
7.2 Data Density threshold ............................................................................................ 39
7.2.1 Definition and computation .............................................................................. 39
7.2.2 Application ......................................................................................................... 40
7.3 Velocity threshold ................................................................................................... 41
7.3.1 Definition and computation .............................................................................. 41
7.3.2 Application ......................................................................................................... 41
7.4 Variance threshold .................................................................................................. 44
7.4.1 Definition and computation .............................................................................. 44
7.4.2 Application ......................................................................................................... 44
7.5 Balance of contributing radials................................................................................ 47
7.5.1 Definition and computation .............................................................................. 47
7.5.2 Application ......................................................................................................... 47
7.6 GDOP Threshold ...................................................................................................... 49
7.6.1 Definition and computation .............................................................................. 49
7.6.2 Application ......................................................................................................... 49
8 Conclusions ................................................................................................................................ 54
9 Bibliography ............................................................................................................................... 55

QA best practices and protocols on QC for radial and total HF radar data
6
1 List of Figures
Figure 1 – Trajectory (in green) of the boat carrying the transponder used to calibrate the
antenna of Matxitxako (Basque County HFR network in the SE Bay of Biscay) in
September 2014. Yellow marker shows the position of the receiving antenna (courtesy
of QUALITAS)................................................................................................................. 12 Figure 2 – Example of the antenna patterns measured for Gulf of Manfredonia HFR network in
one APM campaign. Crossed Loop antenna patterns are shown in the upper 4 panels,
monopole antenna patterns are shown in the 4 lower panels. ....................................... 13 Figure 3 – Example of the scheduled maintenance procedures for the 2-site HFR network in the
SE Bay of Biscay. Minimum recommended frequency for APM is one every two years.
........................................................................................................................................ 14 Figure 4 – Example of a total velocity map generated by the GoM network. The network was
located in the Southern Adriatic Sea, in the Gulf of Manfredonia and it is composed by
four sites: Vieste (VIES), Pugnochiuso (PUGN), Mattinatella (MATT) and Manfredonia
(MANF). The four HFRs have been operating at a frequency of 25 MHz. ..................... 20 Figure 5 – Example of a total velocity map generated by the BoB network. The network is
located in the South-eastern BoB and it is composed by two sites: Higer (HIGE) and
Matxitxako (MATX). The two HFRs operate at a frequency of 4.5 MHz. ....................... 21 Figure 6 – Example of radial velocity data (a) and related over-water QC variable (b). This data
has been measured by the CNR-ISMAR HFR network in the Ligurian Sea (TINO
station) on 7th November 2016. ...................................................................................... 24
Figure 7 – Evolution in time of the maximum radial velocity during year 2014 for MATX station
(a), belonging to the BoB HFR network, and for the MATT station (b), belonging to the
GoM HFR network. ......................................................................................................... 26 Figure 8 – Sensitivity to the maximum radial velocity threshold. The number of times the
maximum radial velocity threshold labelled as “bad data” the original velocity field is
given in the vertical (z) axis, normalized on the number of times the specific cell has
content (i.e. is not a NaN value). The horizontal plane (axes x, y) provide the range and
bearing of the radial data cells. The colour patches of the surfaces report the average
differences between the radial velocities and the threshold for each spatial cell. Panels
(a) and (c) refer to MATX site using 0.6 m/s and 1 m/s as threshold respectively. Panels
(b) and (d) refer to MATT site using 0.6 m/s and 1 m/s as threshold respectively. ....... 27 Figure 9 – Evolution in time (December 2014) of the average radial velocity module with and
without the application of different velocity thresholds for MATX (a) and MATT (b) sites.
........................................................................................................................................ 29 Figure 10 – Evolution in time of the maximum temporal variance during year 2014 for MATX
station (a), belonging to the BoB HFR network, and for the MATT station (b), belonging
to the GoM HFR network. ............................................................................................... 30 Figure 11 – Sensitivity to the maximum temporal variance threshold. The number of times the
maximum temporal variance threshold labelled as “bad data” the original velocity field is
given in the vertical (z) axis, normalized on the number of times the specific cell has
content (i.e. is not a NaN value). The horizontal plane (axes x, y) provide the range and
bearing of the radial data cells. The color patches of the surfaces report the average
differences between the original temporal variances and the threshold for each spatial
cell. Panels (a) and (c) refer to MATX site using 0.15 m2/s
2 and 0.35 m
2/s
2 as threshold
respectively. Panels (b) and (d) refer to MATT site using 0.15 m2/s
2 and 0.35 m
2/s
2 as
threshold respectively. .................................................................................................... 31

QA best practices and protocols on QC for radial and total HF radar data
7
Figure 12 – Evolution in time (December 2014) of the average radial velocity with and without
the application of different variance thresholds for MATX (a) and MATT (b) sites. ....... 32 Figure 13 – Evolution in time of the average bearing of radial velocity vectors during year 2014
for MATX station (a), belonging to the BoB HFR network, and for the MATT station (b),
belonging to the GoM HFR network. .............................................................................. 33 Figure 14 – (a) Time series of the total number of valid radial data, maximum and mean range
and mean bearing angle for Higer and Matxitxako antennas. The three arrows in the
lower panel show the dates of the antenna reparation, and the two APMs, respectively.
(b) Total and radial fields for June 1, 23:00 during the period of malfunctioning (before
the antenna reparation). (c) Total and radial fields for June 2, 14:00 during the period of
normal operation (after the antenna reparation) ............................................................ 34 Figure 15 – Sensitivity to the median filter thresholds. The number of times the median filter
labelled as “bad data” the original velocity field is given in the vertical (z) axis,
normalized on the number of times the specific cell has content (i.e. is not a NaN value).
The horizontal plane (axes x, y) provides the range and bearing of the radial data cells.
The color patches of the surfaces report the average differences between the original
velocities and the median values for each spatial cell. Panels (a) and (c) refer to MATX
site using RCLim = 10 km, AngLim = 30°, CurLim = 0.5 m/s and RCLim = 5 km, AngLim
= 10°, CurLim = 0.02 m/s respectively. Panels (b) and (d) refer to MATT site using
RCLim = 10 km, AngLim = 30°, CurLim = 0.5 m/s and RCLim = 5 km, AngLim = 10°,
CurLim = 0.02 m/s respectively. ..................................................................................... 36 Figure 16 – Radial velocity maps without and with applying the median filter for MATX and
MATT sites. Panels (a), (c) and (e) refer to MATX site using no median filter, RCLim =
10 km, AngLim = 30°, CurLim = 0.5 m/s and RCLim = 5 km, AngLim = 10°, CurLim =
0.02 m/s respectively. Panels (b), (d) and (f) refer to MATT site using no median filter,
RCLim = 10 km, AngLim = 30°, CurLim = 0.5 m/s and RCLim = 5 km, AngLim = 10°,
CurLim = 0.02 m/s respectively. ..................................................................................... 38 Figure 17 – Evolution in time (December 2014) of the average radial velocity with and without
the application of different median filter thresholds for MATX (a) and MATT (b) sites. . 39 Figure 18 – Histogram of the number of radials used for total combination on the BoB HFR
system in 2014. .............................................................................................................. 40 Figure 19 – (a) Spatial distribution of the mean number of radials used for total combination. (b)
Standard deviation with respect to the mean values...................................................... 41 Figure 20 – Evolution in time of the maximum total velocity during year 2014 for BoB network (a)
and for GoM network (b). ............................................................................................... 42 Figure 21 – Sensitivity to the maximum total velocity threshold. The number of times the
maximum total velocity threshold labelled as “bad data” the original velocity field is
given in the vertical (z) axis, normalized on the number of times the specific cell has
content (i.e. is not a NaN value). The horizontal plane (axes x, y) provides the latitude
and longitude of the total data cells. The colour patches of the surfaces report the
average differences between the total velocities and the threshold for each spatial cell.
Panels (a) and (c) refer to BoB site using 0.6 m/s and 1 m/s as threshold respectively.
Panels (b) and (d) refer to GoM site using 0.6 m/s and 1 m/s as threshold respectively.
........................................................................................................................................ 43 Figure 22 – Evolution in time (December 2014) of the average total velocity with and without the
application of different velocity thresholds for BoB (a) and GoM (b) networks. ............. 44 Figure 23 – Evolution in time of the maximum variance during year 2014 for BoB (a) and GoM
(b) networks. ................................................................................................................... 45 Figure 24 – Sensitivity to the maximum variance threshold. The number of times the maximum
variance threshold labelled as “bad data” the original velocity field is given in the vertical
(z) axis, normalized on the number of times the specific cell has content (i.e. is not a

QA best practices and protocols on QC for radial and total HF radar data
8
NaN value). The horizontal plane (axes x, y) provides the latitude and longitude of the
total data cells. The colour patches of the surfaces report the average differences
between the original variances and the threshold for each spatial cell. Panels (a) and (c)
refer to BoB network using 0.15 m2/s
2 and 0.35 m
2/s
2 as threshold respectively. Panels
(b) and (d) refer to GoM network using 0.15 m2/s
2 and 0.35 m
2/s
2 as threshold
respectively. .................................................................................................................... 46 Figure 25 – Evolution in time (December 2014) of the average total velocity with and without the
application of different variance thresholds for BoB (a) and GoM (b) networks. ........... 47
Figure 26 – Histogram of the percent of radials from MATX and HIGE sites respectively, used
for total combination ....................................................................................................... 48
Figure 27 – (a) Spatial distribution of the percent of number of radials coming from the different
contributing sites. (b) Standard deviation with respect to the mean values. .................. 48 Figure 28 – Evolution in time of the maximum GDOP and related maximum and minimum
incidence angles during year 2014 for BoB (a) and GoM (b) networks. ........................ 50 Figure 29 – Sensitivity to the maximum GDOP threshold. The number of times the maximum
GDOP threshold labelled as “bad data” the original velocity field is given in the vertical
(z) axis, normalized on the number of times the specific cell has content (i.e. is not a
NaN value). The horizontal plane (axes x, y) provide the latitude and longitude of the
total data cells. The colour patches of the surfaces report the average differences
between the original GDOP and the threshold for each spatial cell. Panels (a) and (c)
refer to BoB network using 2.20 and 1.41 as threshold respectively. Panels (b) and (d)
refer to GoM network using 2.20 and 1.41 as threshold respectively. ........................... 51 Figure 30 – Total velocity maps without and with applying the GDOP thresholds for BoB and
GoM networks. Panels (a), (c) and (e) refer to BoB network using no GDOP
thresholding, 2.20 and 1.41 as threshold respectively. Panels (b), (d) and (f) refer to
GoM network using no GDOP thresholding, 2.20 and 1.41 as threshold respectively. . 52 Figure 31 – Evolution in time of the number of velocity vectors present in the total velocity field
with and without applying GDOP thresholds for BoB (a) and GoM (b) networks. ......... 53 Figure 32 – Evolution in time (December 2014) of the average total velocity with and without the
application of different GDOP thresholds for BoB (a) and GoM (b) networks. .............. 53

QA best practices and protocols on QC for radial and total HF radar data
9
2 Contributing Experts
L. Corgnati (CNR-ISMAR, EuroGOOS HFR Task Team)
A. Rubio (AZTI, INCREASE TEAM)
C. Mantovani (CNR-ISMAR, EuroGOOS HFR Task Team)
J.L. Asensio (AZTI, INCREASE TEAM)
J. Mader (AZTI, INCREASE TEAM)
A. Novellino (ETT, INCREASE TEAM)
M. Alba (ETT, INCREASE TEAM)
A. Griffa (CNR-ISMAR, EuroGOOS HFR Task Team)
In addition, C. Quentin (CNRS, Mediterranean Institute of Oceanography) was asked to
review this document and contribute to the contents of this deliverable in relation to the
application of the QC to WERA systems.

QA best practices and protocols on QC for radial and total HF radar data
10
3 Introduction
The accurate monitoring of ocean surface transport, which is inherently chaotic and
depends on the details of the surface velocity field at several scales, is key for the
effective integrated management of coastal areas, where many human activities
concentrate. This has been the main driver for the growth of coastal observatories
along the global ocean coasts. Among the different measuring systems, coastal High
Frequency Radar (HFR) is the unique technology that offers the means to map ocean
surface currents over wide areas and temporal resolution. The European HFR systems
are playing an increasing role in the overall operational oceanography marine services.
Their inclusion into CMEMS is crucial to ensure the improved management of several
related key issues as Marine Safety, Marine Resources, Coastal & Marine
Environment, Weather, Climate & Seasonal Forecast.
3.1 Objectives of INCREASE project
INCREASE will set the necessary developments towards the integration of the existing
European HFR operational systems into the CMEMS, following four main objectives:
(i) Provide HFR quality controlled real-time surface currents and key derived products.
(ii) Set the basis for the management of historical data and methodologies for
advanced delayed mode quality-control techniques.
(iii) Boost the use of HFR data for improving CMEMS numerical modelling systems
(iv) Enable an HFR European operational node to ensure the link with operational
CMEMS.
After the fulfilment of WP1 (definition of data and metadata formats), in WP3 the main
objective will be to set the recommendations and methodologies to help the adoption of
these standards, including Quality Assessment/Quality Control (hereinafter QA/QC)
procedures, by the HFR community.
3.2 Objectives of this report
This report is the main deliverable for INCREASE WP3 and focuses on the
development of QA/QC operational basic data, which will be in turn the basis for the
development of additional data products.
QA is an important component to ensure good quality of the operational data
and the main QA procedures are today quite well defined. They will not be further
investigated here, just quickly described and enriched with recommendations on
existing protocols to follow. Concerning QC tests, and based on the discussion
engaged in the INCREASE HFR Experts Workshop, the focus of this document is
to provide basic recommendations for the correct application of the QC tests
identified by the community to be necessary for ensuring the good quality of
real-time data. Most of these tests are ranked as mandatory for the future
European HF radar metadata and data model, while some are still under
discussion in order to be tuned according to the community needs.

QA best practices and protocols on QC for radial and total HF radar data
11
4 QA recommendations
QA means ensuring that the measurement process is taking place in the best available
conditions, knowing exactly the state of the system and all the parameters that can
affect the quality of the measurements time by time and trying to optimize them. QA
involves processes that are mostly employed with hardware. HFRs are land-based
remote sensing platforms, which, in comparison with other ocean observational
techniques, allow the operations of maintenance and restitution of hardware
components be relatively easy and less costly.
QA procedures strictly depend on the type of antenna processing performed by the
device. The HFR systems belong to two categories, characterized by different antenna
processing: Direction Finding (DF) and Phased Array (PA) antennas. DF refers to
receiving antennas and can be implemented with a compact n-element directional
antenna mounted on a single post, or with an array of antennas arranged in a specific
geometry. PA can refer either to transmitting or receiving antennas, and use
beamforming to maximize the transmitted energy in a specific direction or for the
determination of the bearing angle. The simplest configuration of a Phased Array is a
linear phased array whips with λ/2 spacing, where λ is the transmit wavelength
(Stewart and Joy, 1974). CODAR systems are the most used DF systems (Barrick et
al., 1977; Fernandez and Paduan, 1996), WERA devices are the most common PA
systems (Gurgel et al., 1999), even if WERA receiving antennas can be used also in
DF mode.
Several aspects at different stages have to be taken into account from the beginning of
the antenna installation to ensure the best performances of the equipment. Of course,
a basic knowledge of radio equipment and best practices related to their usage is
required. For instance, the attenuation of the HFR signal depends on the working
frequency and the range of the measurement can also be reduced by high sea states,
because in that case the noise floor rises up and weaker echoes become invisible. On
the other hands, “long range” systems working at lower frequencies (4-5MHz) may not
work properly in specific basins (e.g. Mediterranean sea) because ocean waves
needed for the Bragg scattering are missing in that areas, and consequently no echo is
sent back to the receiving antenna.
Also, since HFR signals propagates better through the conductive sea surface than
through the ground, placing the transmitting antenna far from the sea will result in a
power loss and in a smaller SNR in the received signal, again.
At the time of installation, a series of hardware tests should be performed. They include
basic hardware tests to identify possible malfunctioning at the signal generation or
amplification stage (self-generated signal noise or distortion), cable loss (due to
excessive length, damages, improper connector installation), antenna performances
(damages, wrong cable connection, improper grounding). Once the quality is assessed,
operational parameters will be associated with such setup and then monitored during
the life of the system. Any changes on these parameters will be an indicator that most
likely something has changed in the hardware setup, and it shall be investigated.

QA best practices and protocols on QC for radial and total HF radar data
12
Specific guidelines are provided by manufacturers regarding maximum distances from
the sea and position of the antennas versus each other, as well as environmental
requirements. For instance, in a common setup of a Phased Array (PA) HFR system,
the separation between receiving and transmitting antennas must be at least 100 m; for
long range systems a distance of 250 m is recommended; nearby metallic objects
should be avoided as well as big buildings or cliff faces, because they produce
distortions in the antenna pattern or unwanted reflections.
Antenna pattern measurement (APM), especially for direction finding configurations, is
a key step on Quality Assurance. Direction Finding (DF) antennas need regular
calibration of the receive antenna, since its response pattern can be affected by
changes in the near environment, especially when these changes involve metallic
objects or structures. If differences between the current beam pattern and the one
adopted (either ideal or previously measured) are not taken into account, angular bias
may occur as large as 35 degrees (Barrick and Lipa, 1986). Kohut and Glenn (2003)
also showed that system accuracy depends on the amount of distortion of the
measured pattern. It is recommended to calibrate direction finding antennas each year
or when changes that could distort the pattern are suspected or detected (Kohut and
Glenn, 2003). For CODAR receive antennas, the ideal or theoretical patterns of the two
crossed-loop elements are cosine-dependent and oriented orthogonal to each other.
Their measured or real patterns can be obtained through a calibration process in which
a transponder is carried on a boat along a circular trajectory centred on the shore site.
A typical APM (Antenna Pattern Measurement) scenario is represented in Figure 1, in
the SE Bay of Biscay. An example of measured patterns from one APM campaign in
the Gulf of Manfredonia is shown in Figure 2, where it is visible that MANF antenna
pattern is close to an ideal pattern with a bearing of 200 degrees, while VIES antenna
pattern is more distorted and so radial velocities maps probably have greater
uncertainty (Laws et al., 2010).
Figure 1 – Trajectory (in green) of the boat carrying the transponder used to calibrate
the antenna of Matxitxako (Basque County HFR network in the SE Bay of Biscay) in
September 2014. Yellow marker shows the position of the receiving antenna (courtesy of
QUALITAS).

QA best practices and protocols on QC for radial and total HF radar data
13
Figure 2 – Example of the antenna patterns measured for Gulf of Manfredonia HFR
network in one APM campaign. Crossed Loop antenna patterns are shown in the upper
4 panels, monopole antenna patterns are shown in the 4 lower panels.

QA best practices and protocols on QC for radial and total HF radar data
14
To ensure QA, operators in Europe follow the main recommendations of the HFRs
manufacturers, but do not apply common procedure sets (see INCREASE D1.1, for
more detail). While most part of the systems (74%) are controlled in situ periodically
(every 3-6 months or yearly), other systems only benefit from sporadic visits. For
several of the systems additional remote check is performed in a monthly basis or even
daily. Figure 3 provides an example of site maintenance, including the frequency of
remote, in situ and APM operations.
Figure 3 – Example of the scheduled maintenance procedures for the 2-site HFR
network in the SE Bay of Biscay. Minimum recommended frequency for APM is one
every two years.
Assessment of environmental noise or interferences at specific frequencies is another
key step on QA. The presence of noise in the frequency bands allocated for HFRs can
cause significant signal degradation and consequently measurement inaccuracy or
even data loss. Noise in those frequency bands is mostly originated by human
activities; however, the influence of the ionosphere is also frequent, mostly near noon
or in the early afternoon, with a peak during periods of greatest sunspot activity.
Atmospheric intense events, like heavy rain, and high sea status, can both increase the
noise level of the signal. From the recent inventory of European HFRs, the occurrence
of interferences has been reported as a significant issue. Indeed, around 30% of the 50
European HFR systems are experiencing interferences at some level (Mader et al.
2016). In the cases where a persistent interference has been reported, it has been
observed mostly in the 13.5 MHz band, during the afternoon. Such interferences are
avoided in some cases by shifting the system operational bandwidth, however when
this workaround is not possible they represent a critical issue. Before selecting a site,
the frequency spectrum in that location should be scanned for few days for detecting
any persistent interference in advance.
Other guidelines for site planning take into account aspects, like energy supply, internet
communications, accessibility, that are not directly related to data quality, but that are
important for the overall quality service in case it is provided in operational way.
Besides, risk prevention should be taken into account as well. Several
recommendations can be provided to reduce the risk of damages due to severe
weather conditions (wind, humidity, heat, lightning), or the action of animals (for
instance rodents that can damage the cables). Site maintenance is capital to ensure a
high-quality data flow so frequent remote diagnostics of hardware performance are
recommended. Then, quarterly (or when any problems arises) visits to the sites are
needed to check connections, cables and antenna status.

QA best practices and protocols on QC for radial and total HF radar data
15
Another remarkable aspect in QA is the proper setup of the processing software.
Although data can be reprocessed later, and mistakes can be amended, a careful
check of the processing parameters should be performed at the installation time, and
periodically repeated. For instance, crucial settings in CODAR systems have impact on
the automatic selection of the first order settings, i.e. the part of the spectrum which is
supposed to contain all the information on currents velocity. Such settings depend on
the site, but also on the sea state, so optimal settings can slightly change for the same
site within different periods of time.
As the network grows, there will be a growing need for a defined set of QA protocols.
During the INCREASE HFR Experts Workshop (La Spezia, September 2016) this issue
was discussed, and as a first step, it was agreed to refer to the protocols set by the
experts from the Southern California Coastal Ocean Observing System
(www.sccoos.org). Their document entitled: “The Deployment & Maintenance of a
High-Frequency Radar (HFR) for Ocean Surface Current Mapping: Best Practices”
(U.S. IOOS, 2016a), defines a set of best practices developed from the collective
experience of the operators usage of compact direction finding radar systems,
specifically, the SeaSonde® family of direction-finding HFRs manufactured by CODAR
Ocean Sensors, Ltd. This is also the reference document used by the US Integrated
Ocean Observing System (IOOS), cited in the last manual of the “Quality Assurance of
Real-Time Oceanographic Data” (QARTOD) program (see U.S. IOOS, 2016b).
The best practices discussed in this document focus mainly on the installation,
operation, and maintenance of CODAR SeaSonde. Further revisions of this document
are expected to include other manufacturers of HFR equipment. This is an important
aspect for the European community, where 20% of the existing systems provide from
other manufacturers.
The Radiowave Operators Working Group (ROWG) is also pushing towards this
direction through the organization of periodic workshops since 2005, which bring
together the technical and managerial personnel involved in all aspects of operating an
HFR system or network within the IOOS context. The three main pillars of the ROWG
Charter are:
1. To foster collaboration between new and experienced HFR operators.
2. To develop procedures governing HFR operations including:
◦Site logistics
◦Processing to component vectors
◦Total vector products and data management
3. To provide recommendations to users, developers, manufacturers, and
program managers.
The participation of European experts involved in HFR operations in this forum is
especially encouraged.
Finally, it is worth mentioning the ongoing work in JERICO-Next project. Indeed, Task
2.3 of JERICO-Next deals specifically with the harmonization of the different observing
elements within the JERICO infrastructure network, whose specific Task 2.3.1 deals

QA best practices and protocols on QC for radial and total HF radar data
16
with HFRs. Subtask 2.3.1 aims to review and discuss the state-of-the art
methodologies utilized for processing and analysing the data that such systems
generate, including Quality Assurance procedures, computation of error maps, etc., in
order to define Best Practices. The first deliverable (D2.1 report on the status of HF-
radar systems and cabled coastal observatories and Cabled Observatories, October
2016) provided an overview of the state-of-the-art methodologies utilized during the
planning and installation phase of HF-radar sites, and reviews the main relevant
operational aspects, applications, and quality assessment and data management
issues. A devoted meeting held in Mars 2016 in San Sebastian contributed to set the
basis of this work (see http://www.jerico-ri.eu/project-information/meeting-reports/).

QA best practices and protocols on QC for radial and total HF radar data
17
5 Data, metadata and QC standards
While all the radars share the same principles of operation, differences in signal
transmission, reception and processing yield variations in metadata, quality control
metrics and spatial registration. Even within the same type, HFRs may have different
spatial ranges and resolutions, depending typically on the working frequency and
available bandwidth. Quality Control (QC) procedures depend on the antenna
processing (Direction Finding for CODAR and WERA, or Beam Forming for phased
arrays as WERA) of the specific system.
During the fruitful days of the INCREASE HFR Experts Workshop, the main issues
concerning data formats and QC procedures have been discussed in order to meet the
needs of both the HFR community and CMEMS operational services. In particular, the
main points that have been analysed for achieving a common consensus are data
format, metadata structure, QC flagging scheme and QC tests. The final goal of this
task, together with the continuous discussion in the framework of JERICO-Next project,
is the implementation of the European common model for data and metadata for real
time HFR data. The roadmap for achieving this goal was presented in INCREASE
deliverable D1.1 and the reader is referred to this document for further information. The
main elements of this model are summarized as follows:
-Data Format: the HFR community agreed in the decision of producing data
using netCDF-4 classic model format, in order to apply the state of the art
version. For the specific purposes of the INCREASE project, the netCDF-4
classic data will be then converted in netCDF-3.6.1 by the central HFR node to
be developed by WP4. This double data production will meet both HFR
community needs and CMEMS IN-SITU TAC needs.
-Metadata Structure: the CMEMS IN-SITU TAC reference conventions for the
metadata attributes are CF-1.6 and OceanSITES. Thus Mandatory Attributes
have been defined and include attributes necessary to comply with CF-1.6 and
OceanSITES conventions. For the data variables the SDN P09 vocabulary is
used.
-Standards on dimension, naming, definition and syntax of coordinate variables
and data variables, including QC variables derived from the established QC
tests, have been defined and implemented.
-A preliminary set of mandatory and recommended QC tests which are
manufacturer-independent, i.e. they do not rely on particular variables or
information provided only by a specific device, have been defined for total and
radial data. These sets of QC tests are the required ones for labelling the data
as Level 2B (for radial velocity) and Level 3B (for total velocity) data. Please
refer to Table 8 of D1.1 for the processing level definition.
- Reference QC flagging scheme to be used it the one from CMEMS IN-SITU
TAC, i.e. the OceanSITES one, that is reported in Table 1. As also described in
the comments of Table 1, the CMEMS IN-SITU TAC strategy for quality flagging

QA best practices and protocols on QC for radial and total HF radar data
18
states that a “good data” flag is to be assigned to a data if and only if all QC
tests are passed by the data. This strategy will obviously be adopted as a
standard by the HFR community and it has been decided to include in each file
a gridded variable reporting QC flags for each velocity vector (for radial files and
for total files). In order to complement this QC flagging strategy, it has also been
decided to include in each file a QC variable for each performed QC test, in
order to have an overall file quality flagging and all the specific flagging for the
QC tests.
Table 1 – OceanSITES QC Flagging scheme.
Code Meaning Comment
0 unknown No QC was performed
1 good data All QC tests passed
2 probably good data
3 potentially correctable bad data
These data are not to be used without scientific correction or re-calibration
4 bad data Data have failed one or more QC tests
5 - Not used
6 - Not used
7 nominal value Data were not observed but reported (e.g. instrument target depth)
8 interpolated value
9 missing value
5.1.1 QC tests for radial and total data
The selected QC tests have been chosen among the ones listed in the QARTOD
manual, reported in INCREASE D1.1 and after the discussion with the European
experts engaged at the INCREASE HFR Experts Workshop (La Spezia, September
2016). The choice of the tests was made in order to ensure that they are manufacturer-
independent, i.e. they do not rely on particular variables or information provided only by
a specific device. From the work on the application of these tests, through the
development of the scripts and identification of the needed variables, we realize that
this is not always the case. Indeed as we will discuss later on, some of the tests are not
needed for WERA PA systems. Consequently, we will need to work further on these
definitions, probably changing some of the “mandatory tests” into “recommended”
tests, which could be avoided by the users from WERA PA systems, when necessary.
In any case, the sets of standard tests that are further developed in the next sections
have been defined both for radial and total velocity data. The final goal is to select and
define the QC battery of tests required for labelling the data as Level 2B (for radial
velocity) and Level 3B (for total velocity) data.

QA best practices and protocols on QC for radial and total HF radar data
19
The tests chosen for radial data are:
Syntax test
Over-water test
Velocity Threshold test
Variance Threshold test
Median Filter test
Average Radial Bearing test
The tests chosen for total data are:
Syntax test
Data Density Threshold
Balance of contributing radials
Velocity Threshold
Variance Threshold
GDOP Threshold
The definition and the application guidelines of each of these tests are provided in the
next sections. For some of them, HFR operators will need to select the best thresholds.
Since a successful QC effort is highly dependent upon selection of the proper
thresholds, this choice is not straightforward, and may require trial and error before
final selections are made. These thresholds should not be determined arbitrarily, but
based on historical knowledge or statistics derived from historical data. In the next
sections we provide recommendations on how to choose these thresholds through the
application of the listed battery of tests to two different HFR systems.
5.1.2 Demonstration on QC tests application to two real cases
The processing from raw data to the final products, as well as the data formats, are
different, depending on the system configuration and/or manufacturer, but also on the
software used. Apart from the manufacturer’s software (CODAR’s Radial Suite and
WERA software, SeaView software), an extended tool for HFR data processing is the
HFR_Progs toolbox, developed by the University of California and NPS (see
https://cencalarchive.org/~cocmpmb/COCMP-wiki). HFR_Progs toolbox, developed in
Matlab®, allows different methods and error quantification, starting from radial files
generated by a WERA or a CODAR system. Files are converted into Matlab® binary
files and all the initial information contained in radial data is kept in the Matlab® file
structure.
For this demonstration our starting point will be the CODAR radial and total data files
provided by the manufacturer. This is done for practical reasons since the partners of
INCREASE project operate CODAR systems and this is also the most extended
technology in Europe at the moment. Please note that, although for this demonstration
we are focusing in two CODAR HFRs, efforts are done to orient WERA PA and other
types of HFR systems operators through the recommendations, following QARTOD
indications (U.S. IOOS, 2016b).

QA best practices and protocols on QC for radial and total HF radar data
20
CODAR files contain data in ASCII format and a header with information on the system
configuration and processing information, which are needed to build the metadata and
feed the mandatory QC tests.
In particular, throughout this document, examples of application and impact of the QC
tests will be reported with reference to two different case studies:
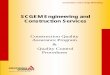
the Adriatic deployment of the CNR-ISMAR HFR network (GoM), deployed in
the Gulf of Manfredonia in the Southern Adriatic Sea and composed by the four
sites of Vieste (VIES), Pugnochiuso (PUGN), Mattinatella (MATT) and
Manfredonia (MANF), which are equipped with four 25 MHz CODAR SeaSonde
Systems (Corgnati et al., 2015). This network (Figure 4) has been operational in
the period May 2013 – June 2015, and it was then moved in the Ligurian Sea,
where is now operational.
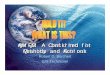
the Euskalmet Basque Country HFR network (BoB), deployed in the Bay of
Biscay and composed by the two sites of Higer (HIGE) and Matxitxako (MATX),
which operates two 4.5 MHz CODAR SeaSonde systems (Rubio et al., 2011,
Figure 5);
Figure 4 – Example of a total velocity map generated by the GoM network. The network
was located in the Southern Adriatic Sea, in the Gulf of Manfredonia and it is composed
by four sites: Vieste (VIES), Pugnochiuso (PUGN), Mattinatella (MATT) and
Manfredonia (MANF). The four HFRs have been operating at a frequency of 25 MHz.

QA best practices and protocols on QC for radial and total HF radar data
21
Figure 5 – Example of a total velocity map generated by the BoB network. The network
is located in the South-eastern BoB and it is composed by two sites: Higer (HIGE) and
Matxitxako (MATX). The two HFRs operate at a frequency of 4.5 MHz.
These two networks are characterized by different operating frequencies and provide
data with different spatial resolution and coverage. The detailed technical aspects of
these two networks are provided in Table 2.
Table 2 – Main characteristics of the systems used for the demonstration.
HFR NETWORK
Gulf of Manfredonia Basque Country
Numbser of SITES
4 2
Name of sites VIES PUGN MATT MANF MATX HIGE
Sites lat , lon coordinates
41,89 41,78 41,73 41,62 43,45 43,38
16,18 16,19 16,12 15,93 -2,75 -1,78
Manufacturer CODAR CODAR
Type of radar Direction Finding Direction Finding
Temporal resolution (minutes)
60 60
Spatial resolution of total velocity
grid (m)
1500 5000
Tansmit Fequency
(MHz) 24,525 26,275 4,525
Tansmit Bandwidth
(KHz) 150 40

QA best practices and protocols on QC for radial and total HF radar data
22
In addition to the differences in sampling and coverages, they are located in areas
which are affected by different ocean processes.
The circulation in the area the Southern Adriatic Sea is part of the general cyclonic
circulation of the Adriatic (Poulain, 2001), forced by buoyancy input and wind. A well-
defined boundary current, the Western Adriatic Current (WAC), flows to the southeast
on the shelf with a core centred on the 100 m isobaths. The WAC is energetic (surface
speeds up to 0.5 m s-1) and with significant fluctuations especially close to the tip of
the Gargano Cape, where the current tends to detach rejoining the coast south of the
Gulf (Taillandier et al., 2008). The flow in the Gulf of Manfredonia (at the lee of the
Cape) is characterised by high variability, with both cyclonic and anticyclonic
recirculations and typical root means square (RMS) velocities of the order of 0.20
m/sec.
The primary surface circulation pattern in the BoB area presents a marked seasonal
variability. A key component of this variability is the slope Iberian Poleward Current
(IPC). In winter, the IPC flows eastward along the Spanish coast and northward along
the French coast, affecting the upper water column and presenting velocities up to 0.7
m/s. In summer, the flow is reversed and three times weaker than in winter [-
Solabarrieta et al. 2014]. Overlaid to the density-driven slope circulation, wind-induced
currents are the main drivers of the surface ocean circulation in the area and can be at
the origin of intense surface velocities. Mesoscale coherent structures have also been
observed within the HFR footprint area (Rubio et al, 2013).
For both networks, the time period considered for the examples of application of the
QC tests is the year 2014.

QA best practices and protocols on QC for radial and total HF radar data
23
6 Implementation of QC tests to radial data
Six QC tests are being tested for radial data. All of them have been defined as
mandatory for the European common data and metadata model for real-time HFR data.
6.1 Syntax Test
6.1.1 Definition and computation
This test will ensure the proper formatting and the existence of all the necessary fields
within the radial netCDF file. This test is performed on the netCDF files and it assesses
the presence and correctness of all data and attribute fields and the correct syntax
throughout the file. The reference schemes for data and metadata structures and
syntax are described in the deliverable 5.13 of the JERICO-Next project
(http://www.jerico-ri.eu/project-information/deliverables/).
Other complementary test to verify some of the fields contained in the metadata can be
also applied, and the correct values should be stablished by the operators. This can
include verification of the timestamp value (the timestamp should be coherent with the
actual time for operational data and coincide with the filename and within a consistent
range in any case), existence and consistent data concerning site names, site codes,
time zones, site locations. For instance for EU systems the site location should be in a
range defined by [-10 +35]°E Latitude and [-25 70]°N Longitude. The suit of
verifications made by the IOOS National network on radial data can be found at
QUARTOD manual (U.S. IOOS, 2016b).
The result of the test is a scalar QC variable that is inserted into the netCDF file after
the test completion.
6.2 Over-water
6.2.1 Definition and computation
This test labels radial vectors that lie on land with a “bad data” flag and radial vectors
that lie on water with a “good data” flag. The output is a gridded QC variable, with the
same dimensions of the radial velocity data variable, containing, for each cell, the flag
related to the vector lying in that cell.
In CODAR data, the variable VFLG is used for the implementation of the test, since this
variable takes values of 0 to indicate that the vector lies on water and takes the value
of 128 indicating that the vector lies on land.
Although it is always present in the CODAR data format, the convenience of this
variable depends on the SeaSonde Radial Site software release. It is only properly
implemented for Release 7 or higher and for previous software versions it can be
always hosting values equal to zero (or other values) and does not allow discriminating
between vectors in and out the angular filter area.

QA best practices and protocols on QC for radial and total HF radar data
24
For WERA PA systems, the angle of view of the radar is limited to 120° and on land the
SNR is to low and don’t provide any solution. Thus, the Seaview Sensing software
removes all cells on land before any processing is done. In this case, the QC flag for
the over-water test should be automatically produced containing all “good data” values.
It is left to the HFR operator to apply an additional masking if none of these solutions is
working.
6.2.2 Application
Figure 6 shows an example of application of the over-water test on a radial velocity
map measured by the CNR-ISMAR HFR network in the Ligurian Sea (TINO station).
We have chosen this specific station (not in the GoM, nor in the BoB networks) system
since it provides an example of how this test can be crucial for some installations which
produce a high number of vectors on land.
Panel (a) shows a map of radial velocities, including a number of velocity vectors lying
on land. The colour palette refers to velocity values. The panel (b) shows the map of
over-water flags related to the velocity field of panel (a). In panel (b) the colour palette
is referred to the values of the flag: 1 if the vector lies on water (blue cells), 4 if the
vector lies on land (red cells).
This structure allows for having the velocity field and the mask within the same data
file.
(a) Radial velocity measured at TINO
(b) Land mask for radial velocity at TINO
Figure 6 – Example of radial velocity data (a) and related over-water QC variable (b).
This data has been measured by the CNR-ISMAR HFR network in the Ligurian Sea
(TINO station) on 7th
November 2016.
It has to be noticed that the presence of velocity vectors on land can be significant in
particular situations, like for instance the one reported in Figure 6, where the radar
antenna is installed on top of a little island surrounded by the sea but with land
separated by the island just by a small portion of water.

QA best practices and protocols on QC for radial and total HF radar data
25
6.3 Velocity threshold
6.3.1 Definition and computation
This test labels radial velocity vectors whose module is bigger than a maximum velocity
threshold with a “bad data” flag and radial vectors whose module is smaller than the
threshold with a “good data” flag. The output is a gridded QC variable with the same
dimensions of the radial velocity data variable, containing, for each cell, the flag related
to the vector lying in that cell.
The threshold for the implementation of this test has to be applied to the absolute value
of the variable VELO, present in both CODAR and WERA radial LLUV formats,
containing the amplitude of the radial current vector velocity (negative velocity implies
180° direction change).
The choice of the maximum radial velocity threshold has to be made carefully, since
using a tight threshold can lead to the elimination of accurate data. The
recommendation in this case is to examine the time-series of the maximum radial
velocity of the data (during at least one complete seasonal cycle for which the proper
functioning of the device is assessed) and consult the literature.
Furthermore, it is also recommended to analyse the impact of the selected threshold
(or of the candidate thresholds) on the velocity fields of the dataset containing at least
one complete seasonal cycle.
The aim of this filter is to identify unexpected extremely high velocities for further
investigation. It reinforces the median filter (see paragraph 6.6), which also contributes
to tag unexpected high values, and gives further information on the nature of the
suspect values.
Examples of application of this test are provided in the next subsection for the two case
study areas.
6.3.2 Application
With reference to BoB and GoM HFR networks, Figure 7 shows the evolution in time of
the maximum radial velocity for MATX (a) and MATT (b) stations during the year 2014.

QA best practices and protocols on QC for radial and total HF radar data
26
(a) MATX (b) MATT
Figure 7 – Evolution in time of the maximum radial velocity during year 2014 for
MATX station (a), belonging to the BoB HFR network, and for the MATT station (b),
belonging to the GoM HFR network.
The two graphs are a precious aid in determining the range where maximum velocities
lie: Figure 7 shows that (for year 2014) in MATX station the maximum velocity mainly
ranges in [0.4 – 0.7] m/s, while in MATT station the maximum velocity normally lies in
the range [0.2 – 0.6] m/s. On these bases, it is now possible to define a maximum
velocity threshold compatible with the velocity values measured by the stations of the
network. For this example let us consider two different thresholds, 0.6 m/s and 1 m/s, in
order to verify the impact they have on the velocity fields. This approach is
recommended, since it allows for comparing the effects of different thresholding
strategies.
Figure 8 shows (on z axis) the number of times the maximum velocity threshold
labelled as “bad data” the original velocity fields in MATX and MATT stations using the
two thresholds listed above. The z-axis values are normalized on the number of times
the specific cell has content (i.e. is not a NaN value). The colour patches of the
surfaces report the average differences between the radial velocity and the threshold
for each spatial cell. The X-Y axes grid is the exact range-bearing (which provides the
radial direction in degrees clockwise from true North) of the original data. In this way it
is possible to localize each radial velocity cell.
Figure 8(a) shows that in MATX site the velocity vectors exceeding the 0.6 m/s
thresholds very often lie at the farthest border of the coverage. Indeed, for this
installation values over 0.6 m/s are quite frequent and realistic in this area, linked to the
intensification of the shelf-slope current (see Figure 5).
When increasing the threshold to 1 m/s (Figure 8(c)), the velocity vectors are more
rarely cut by the threshold and, as expected, the values exceeding the threshold lie at
the farthest border of the coverage.
Figure 8(b) shows that in MATT site the threshold is active along all ranges for bearing
in [100 – 130]° but very often for small differences between velocities and thresholds. If
the threshold is set to 1 m/s, the test acts very rarely, as depicted in Figure 8(d).

QA best practices and protocols on QC for radial and total HF radar data
27
(a) MATX – velocity threshold 0.6 m/s
(b) MATT – velocity threshold 0.6 m/s
(c) MATX – velocity threshold 1 m/s
(d) MATT – velocity threshold 1 m/s
Figure 8 – Sensitivity to the maximum radial velocity threshold. The number of times
the maximum radial velocity threshold labelled as “bad data” the original velocity field
is given in the vertical (z) axis, normalized on the number of times the specific cell has
content (i.e. is not a NaN value). The horizontal plane (axes x, y) provide the range and
bearing of the radial data cells. The colour patches of the surfaces report the average
differences between the radial velocities and the threshold for each spatial cell. Panels
(a) and (c) refer to MATX site using 0.6 m/s and 1 m/s as threshold respectively. Panels
(b) and (d) refer to MATT site using 0.6 m/s and 1 m/s as threshold respectively.
This representation allows for identifying areas of the coverage where the test is acting
frequently or rarely and for small or big differences with respect to the original velocity
field.
If the threshold is put to zero, we expect to see a flat graph with value 1 (filter is acting
100% of times), with colours reflecting the average velocity in each cell over the period
of time considered. While the threshold increases, a non-uniform modification of the
plateau is expected, indeed in some cells velocities could remain all the time below the
new threshold, in some others they could remain below the new threshold many times,
in some others few times. In general then rising up the threshold will result in a non-
proportional modification of every cell’s peak, until a uniform zero is reached (threshold
higher than all the velocities). At every step, the colour is reflecting the average
difference between the exceeding velocities and the threshold. Consider two cases a)
and b) for the same cell in which we have five exceeding values giving the following

QA best practices and protocols on QC for radial and total HF radar data
28
five differences a=(1 cm/s; 2 cm/s; 1 cm/s; 1 cm/s; 20 cm/s) or b=(5 cm/s; 5 cm/s; 5
cm/s; 4 cm/s; 6 cm/s). Peak is of course the same in both cases. Since the average is
always 5 cm/s, also the colour will be the same in both cases, and will be hiding some
information. Imagine now to increase the threshold of 2 cm/s. Now differences will be
a=(18 cm/s) and b=(3 cm/s; 3 cm/s; 3 cm/s; 2 cm/s; 4 cm/s), with average value of a-
average=18 cm/s, b-average=3 cm/s. The a-case graph will result in smaller peak with
much higher average value (colour turning very much toward red), while the b-case
graph will result in the same peak as before with a colour turning slightly toward blue.
The a-case shows a more suspect value of velocity than the b-case, thus the way the
peaks and the colours change in function of the threshold’s values should be taken into
account.
In a general way, if the test is acting often and on a wide area for small amounts
(plateau with high z-values and with colours associated to small differences between
threshold and original velocity), it means that a) we have unexpected extremely high
velocities everywhere and very often, which is a suspect circumstance, or b) the
threshold is too low and should be increased, in order to avoid these frequent small
corrections.
A plateau with colours associated to high differences between threshold and original
velocity means that the filter is active very frequently on wide areas and for huge
amounts. This situation could indicate that the threshold is too low, thus being always
active.
The presence of peaks with colours associated to small differences between threshold
and original velocity indicates frequent corrections for small amounts in specific cells,
or, in other words, very often we have slightly exceeding velocities. If peaks are close
each other, we could suppose a) critical area of the coverage, or b) very energetic
area. If peaks are isolated and randomly spaced, we could suppose spikes. In both
cases the threshold could be increased, because the little difference between the
velocity value and the threshold suggests that the exceeding velocities are very close
to the threshold. Increasing the threshold in this case could reveal more information.
If the test is acting very frequently just in some random cells (high peaks in separate
cells), or specific zones where high velocities are not expected, for huge amounts
(peaks with colours associated to big differences between threshold and original
velocity), the threshold could be adequate, since it corrects recurring extremely high
velocity values, without affecting at all the values in the rest of the domain.
Anyway, all these situations have to be investigated by the operator before choosing
the threshold, according to the local history, to his experience and to literature.
Another useful and simple check to do when choosing the threshold for the QC test, is
to examine the evolution in time of the average radial velocity module with and without
the application of the candidate thresholds. In this way, it is possible to have a quick
overview of the effects of the test (that keeps only velocities whose absolute value is
lower than the threshold) on the velocity field. Figure 9 reports this comparison.

QA best practices and protocols on QC for radial and total HF radar data
29
(a) MATX
(b) MATT
Figure 9 – Evolution in time (December 2014) of the average radial velocity module
with and without the application of different velocity thresholds for MATX (a) and
MATT (b) sites.
6.4 Variance threshold
6.4.1 Definition and computation
This test labels radial vectors whose temporal variance is bigger than a maximum
threshold with a “bad data” flag and radial vectors whose temporal variance is smaller
than the threshold with a “good data” flag. The output is a gridded QC variable with the
same dimensions of the radial velocity data variable, containing, for each cell, the flag
related to the vector lying in that cell.
High values of variance are mostly due to radio interference (low SNR) that are
translated in Doppler lines and abnormal value in radial velocity. In DF systems, the
origin of a big variance when SNR is low is also due to the wrong attribution of the
direction of arrival of the radar echo. In this case, the algorithm assigns to a given
range cell velocities that come from other cells, thus generating high uncertainty.
Another source of high variance could be the occasional or persistent high variability of
the currents over the time, in a specific part of the coverage area.
To implement this test on CODAR data, the variance field has to be evaluated from the
variable STDV, which contains the radial temporal standard deviation of current velocity
over the coverage period (referred to the integration period necessary for the
production of the hourly radial velocity data). In previous releases of the CODAR LLUV
file format, the variable STDV was named ETMP.
For WERA systems, the variance threshold has to be applied to the variable EVAR,
containing the radial variance of current velocity over coverage period (referred to the
integration period necessary for the production of the hourly radial velocity data).
The choice of the maximum variance threshold has to be made carefully, since using a
tight threshold can lead to the elimination of accurate data. The recommendation in this
case is to examine the time-series of the maximum variance of the data (during at least

QA best practices and protocols on QC for radial and total HF radar data
30
one complete seasonal cycle for which the proper functioning of the device is
assessed) and consult the literature.
Furthermore, it is also recommended to analyse the impact of the selected threshold
(or of the candidate thresholds) on the velocity fields of the dataset containing at least
one complete seasonal cycle.
Examples of application of this test are provided in the next subsection for the two case
study areas.
6.4.2 Application
Figure 10 shows the evolution in time of the maximum temporal variance for the sites
MATX (a) and MATT (b), belonging to the two case studies presented in Section 5.
(a) MATX (b) MATT
Figure 10 – Evolution in time of the maximum temporal variance during year 2014 for
MATX station (a), belonging to the BoB HFR network, and for the MATT station (b),
belonging to the GoM HFR network.
Based on the variance trends in the two stations (the maximum temporal variance
mainly ranges in [0 – 1] m2/s2 for MATX site and in the range [0 – 0.25] m2/s2 for MATT
site) it is possible to define an adequate maximum temporal variance threshold. For
this example let us consider two different thresholds, 0.15 m2/s2 and 0.35 m2/s2, in
order to verify the impact they have on the velocity fields. This approach is
recommended for comparing the effects of different thresholding strategies.
Figure 11 shows (on z axis) the number of times the maximum temporal variance
threshold labelled as “bad data” the original velocity fields in MATX and MATT stations
using the two thresholds listed above. The z-axis values are normalized on the number
of times the specific cell has content (i.e. is not a NaN value). The colour patches of the
surfaces report the average difference between the original temporal variances and the
threshold for each spatial cell. The X-Y axes grid is the exact range-bearing grid of the
original data. In this way, it is possible to localize each radial velocity cell.

QA best practices and protocols on QC for radial and total HF radar data
31
As explained in Section 6.3.2, Figure 11 shows the frequency and the amount of the
intervention of the test and the precise localization of the cell affected by the test, thus
being a valuable aid in the definition of the threshold to apply to data.
Figure 11(a) and Figure 11(b) show that the 0.15 m2/s2 threshold is acting on the whole
grid very often but with small amounts for both sites. Figure 11(c) and Figure 11(d)
show that a higher threshold (0.35 m2/s2) acts less frequently in both sites: in MATX the
action of the test is still spread, while in MATT the filter is active very rarely. As
expected, in MATX site the vectors with higher variance lie on the farthest border of the
coverage. The 0.35 m2/s2 seems to be still too low for MATX, since the number of
correction over the whole domain is still high.
Again, the recommendation is to investigate any particular situation emerging from
these graphics before to define the operational threshold.
(a) MATX – variance threshold 0.15 m
2/s
2
(b) MATT – variance threshold 0.15 m
2/s
2
(c) MATX – variance threshold 0.35 m
2/s
2
(d) MATT – variance threshold 0.35 m
2/s
2
Figure 11 – Sensitivity to the maximum temporal variance threshold. The number of
times the maximum temporal variance threshold labelled as “bad data” the original
velocity field is given in the vertical (z) axis, normalized on the number of times the
specific cell has content (i.e. is not a NaN value). The horizontal plane (axes x, y)
provide the range and bearing of the radial data cells. The colour patches of the
surfaces report the average differences between the original temporal variances and the
threshold for each spatial cell. Panels (a) and (c) refer to MATX site using 0.15 m2/s
2
and 0.35 m2/s
2 as threshold respectively. Panels (b) and (d) refer to MATT site using
0.15 m2/s
2 and 0.35 m
2/s
2 as threshold respectively.

QA best practices and protocols on QC for radial and total HF radar data
32
As for the previous test, a useful and simple check to do when choosing the threshold
is to examine the evolution in time of the average velocity module with and without the
application of the candidate thresholds. In this way it is possible to have a quick
overview of the effects of the test (that keeps only vectors whose variance is lower than
the threshold) on the velocity field. Figure 12 reports this comparison.
(a) MATX
(b) MATT
Figure 12 – Evolution in time (December 2014) of the average radial velocity with and
without the application of different variance thresholds for MATX (a) and MATT (b)
sites.
6.5 Average radial bearing
6.5.1 Definition and computation
Test determining that the average bearing of the radial velocity vectors lies within a
specified interval centred on the expected value for proper operation. The value of
proper operation has to be defined within a time interval when the proper functioning of
the device is assessed. The interval has to be set according to the site-specific
properties. The output is a scalar QC variable assuming “good data” value if the
average radial bearing lies in the proper range and the “bad data” value if not.
This test is linked to the antenna pattern evolution, and it is very important for a
compact antenna, i.e. for DF systems. It has not a significant meaning for PA, even if it
can be evaluated for both kind of devices.
For both CODAR and WERA systems, the average radial bearing of a velocity field has
to be evaluated by averaging the variable BEAR, which contains the current vector
bearing in degrees clockwise from true North from the site origin.
The choice of the valid bearing range has to be made on the basis of the installation
geometry and on the trend in historical series. The recommendation in this case is to
examine the time-series of the average bearing of radial velocities (during at least one
complete seasonal cycle for which the proper functioning of the device is assessed).

QA best practices and protocols on QC for radial and total HF radar data
33
Figure 13 shows the evolution in time of the average bearing of radial velocities for the
sites MATX (a) and MATT (b), belonging to the two case studies presented in Section
5.
An example of application of this test is provided in the next subsection.
(a) MATX (b) MATT
Figure 13 – Evolution in time of the average bearing of radial velocity vectors during
year 2014 for MATX station (a), belonging to the BoB HFR network, and for the MATT
station (b), belonging to the GoM HFR network.
6.5.2 Application
To illustrate the efficacy and application of this test, we will use a specific situation
occurred in the BoB HFR in May-June 2015 (Figure 14). At the end of May the antenna
at HIGE site was seriously damaged. For several days, the antenna laid over the floor
while continuing to emit. During this period of malfunctioning, the maximum and
medium total range covered by the antenna remained unchanged. However there was
a drastic change in the angular coverage and thus in the mean bearing of the area
covered by the antenna (see map in Figure 14(b)), with the consequent decrease in the
total number of valid radial and total data (Figure 14.a).
Due to the location of the two antennas in the BoB HFR and the change in the coast
direction, the mean bearing angle of the oceanic area covered by the two antennas is
different. The mean bearing angle for HIGE antenna is higher than that of Matxitxako
antenna.
In figure 14, it can be observed how the mean bearing angle for HIGE antenna was
lower than that for MATX antenna during the period of hardware problems (May 30 –
June 2). The system was fixed on June 2 (see first arrow in Figure 14(a), lower panel)
and the following days the APM of both antennas were performed (second and third
arrows in Figure 14(a), lower panel). From the date of the last APM on the system
restarted a normal operation (See Figure 14(c)).
As it can be observed in the temporal series of the mean bearing angles, small
changes in the mean bearing angle during normal operation can occur. However any
major change of the mean bearing angle is a good indicator of bad quality data. The

QA best practices and protocols on QC for radial and total HF radar data
34
threshold has to be chosen in order to allow the small variations and detect any
significant drift from the normal values. For instance, for the BoB HFR the optimal
thresholds are [160 200] for MATX and [140 160] for HIGE.
Figure 14 – (a) Time series of the total number of valid radial data, maximum and mean
range and mean bearing angle for HIGE and MATX antennas. The three arrows in the
lower panel show the dates of the antenna reparation, and the two APMs, respectively.
(b) Total and radial fields for June 1, 23:00 during the period of malfunctioning (before
the antenna reparation). (c) Total and radial fields for June 2, 14:00 during the period
of normal operation (after the antenna reparation)
6.6 Median filter
6.6.1 Definition and computation
This QC test aims at assessing the smoothness of the distribution of the velocity
vectors in the radial field. For each source radial vector (i.e. radial bin), the median of
all velocities within a radius of <RCLim> and whose vector bearing (angle of arrival at
site) is also within an angular distance of <AngLim> degrees from the source vector's
bearing is evaluated. If the difference between the vector's velocity and the median
velocity is greater than a threshold <CurLim>, then the vector is labelled as “bad data”.
Otherwise the vector is labelled as “good data”. The output is a gridded QC variable
with the same dimensions of the radial velocity data variable, containing the flag values
for each cell.

QA best practices and protocols on QC for radial and total HF radar data
35
In the application of this test there is also the possibility, if the difference between the
vector's velocity and the median velocity is greater than the <CurLim> threshold, of
substituting the velocity vector with the median evaluated in the surrounding window
and label it as “interpolated data”. The choice is up to the operator. Anyway, the
recommendation is to keep the original values and to flag velocity vectors as “good
data” or “bad data”, in order not to lose the measured information.
It has to be noticed that this test could be tricky when applied in situations with high
heterogeneity due to islands or small structures present in the HFR coverage. In these
cases some information can be lost.
To apply this test to both CODAR and WERA data, the window for the computation of
the median value has to be built using the variables VELO, containing the current vector
velocity, and BEAR, containing the current vector bearing.
The choice of the three thresholds (RCLim, AngLim and CurLim) has to be made
carefully, after having analysed the behaviour of the current fields in the monitored area
and according to literature indications. Also it must be taken into account the bearing
and range resolution of the original data.
Furthermore, it is also recommended to analyse the impact of the selected threshold
(or of the candidate thresholds) on the velocity fields of the dataset containing at least
one complete seasonal cycle.
Examples of application of this test are provided in the next subsection for the two case
study areas.
6.6.2 Application
For this example, two sets of thresholds are defined, in order to evaluate the impact on
velocity fields of two different approaches.
The first set of thresholds is defined as:
RCLim = 10 km
AngLim = 30°
CurLim = 0.5 m/s
It is characterized by high values of all three parameters, thus acting only if the
difference between the measured current vector under investigation and the median is
big, and also by large range and bearing limits, thus evaluating the median velocity
over wide areas around the analysed vector. It is expected that evaluating the median
velocity over a wide area likely brings to bigger differences between the median and
the original value. This setup keeps smooth velocities over large areas.
The second set of thresholds is defined as:
RCLim = 5 km
AngLim = 10°
CurLim = 0.02 m/s

QA best practices and protocols on QC for radial and total HF radar data
36
This setup acts more frequently on the velocity field, since the velocity difference
required for triggering the filter is much lower (0.02 m/s). In this case the median
velocity is evaluated on a smaller area than in the previous case.
Figure 15 shows (on z axis) the number of times the median filter labelled as “bad data”
the original radial velocity fields in MATX and MATT station using the two sets of
thresholds listed above. The z-axis values are normalized on the number of times the
specific cell has content (i.e. is not a NaN value).
(a) MATX
RCLim = 10 km, AngLim = 30°, CurLim = 0.5 m/s
(b) MATT
RCLim = 10 km, AngLim = 30°, CurLim = 0.5 m/s
(c) MATX
RCLim = 5 km, AngLim = 10°, CurLim = 0.02 m/s
(d) MATT
RCLim = 5 km, AngLim = 10°, CurLim = 0.02 m/s
Figure 15 – Sensitivity to the median filter thresholds. The number of times the median
filter labelled as “bad data” the original velocity field is given in the vertical (z) axis,
normalized on the number of times the specific cell has content (i.e. is not a NaN value).
The horizontal plane (axes x, y) provides the range and bearing of the radial data cells.
The colour patches of the surfaces report the average differences between the original
velocities and the median values for each spatial cell. Panels (a) and (c) refer to MATX
site using RCLim = 10 km, AngLim = 30°, CurLim = 0.5 m/s and RCLim = 5 km,
AngLim = 10°, CurLim = 0.02 m/s respectively. Panels (b) and (d) refer to MATT site
using RCLim = 10 km, AngLim = 30°, CurLim = 0.5 m/s and RCLim = 5 km, AngLim =
10°, CurLim = 0.02 m/s respectively.

QA best practices and protocols on QC for radial and total HF radar data
37
The colour patches of the surfaces report the average differences between the original
velocities and the median velocities for each spatial cell. The X-Y axes grid is the exact
range-bearing grid of the original data. In this way it is possible to localize each radial
velocity cell.
As explained in Section 6.3.2, Figure 15 shows the frequency and the amount of the
intervention of the test and the precise localization of the cell affected by the test, thus
being a valuable aid in the definition of the thresholds to apply to data.
Figure 15(a) and Figure 15(b) show that the first set of thresholds is acting widely but
not so frequently on both MATX and MATT data. In particular, it is acting rarely on
MATT data and a little more frequently on MATX data. In MATX data, the more
corrected values are the ones belonging to the farthest border of the coverage, as
usual.
The second set of thresholds is acting very widely and very frequently on both data
(Figure 15(c) and Figure 15(d)). This situation seems to suggest to increase the CurLim
value (in order to let the filter act less) or to low down the RCLim and AngLim values, in
order to reduce the area where to evaluate the median velocity (the biggest the area
the most diverse the median and original velocity).
As for the previous tests, the recommendation is to investigate any particular situation
emerging from these graphics before to define the operational thresholds.
Figure 16 shows an example of how the median filter would modify the different
velocity fields. As expected, the second set of thresholds smooths the fields in a
significant way, thus the filtered fields are very different from the original one. This
visualization is very useful to manage the trade off in selecting the thresholds. Indeed,
for the BoB system the results suggest that even the second threshold is too restrictive,
since it is smoothing significantly the data along the radial directions. Since the range
resolution of BoB is lower than that of GoM system the RCLim and CurLim should be
probably higher in this case. This illustrates again the importance of choosing the
correct thresholds taking into account the system and data characteristics.
A useful and simple check to do when choosing the thresholds for the test, is to
examine the evolution in time of the average velocity with and without the application of
the candidate threshold sets. In this way it is possible to have a quick overview of the
effects of the test (that keeps only velocities fulfilling the median filter constraint) on the
velocity field. Figure 17 reports this comparison.

QA best practices and protocols on QC for radial and total HF radar data
38
(a) MATX
Original radial velocity field
(b) MATT
Original radial velocity field
(c) MATX
RCLim = 10 km, AngLim = 30°, CurLim = 0.5 m/s
(d) MATT
RCLim = 10 km, AngLim = 30°, CurLim = 0.5 m/s
(e) MATX
RCLim = 5 km, AngLim = 10°, CurLim = 0.02 m/s
(f) MATT
RCLim = 5 km, AngLim = 10°, CurLim = 0.02 m/s
Figure 16 – Radial velocity maps without and with applying the median filter for MATX
and MATT sites. Panels (a), (c) and (e) refer to MATX site using no median filter,
RCLim = 10 km, AngLim = 30°, CurLim = 0.5 m/s and RCLim = 5 km, AngLim = 10°,
CurLim = 0.02 m/s respectively. Panels (b), (d) and (f) refer to MATT site using no
median filter, RCLim = 10 km, AngLim = 30°, CurLim = 0.5 m/s and RCLim = 5 km,
AngLim = 10°, CurLim = 0.02 m/s respectively.

QA best practices and protocols on QC for radial and total HF radar data
39
(a) MATX
(b) MATT
Figure 17 – Evolution in time (December 2014) of the average radial velocity with and
without the application of different median filter thresholds for MATX (a) and MATT (b)
sites.
7 Implementation of QC tests to total data
Six QC tests are being tested for total data. Five of them have been defined as
mandatory for the European Common data and metadata model for real-time HFR
data. The “Balance Of Contributing Radials” test has been defined as recommended
for CODAR operators.
7.1 Syntax Test
7.1.1 Definition and computation
This test will ensure the proper formatting and the existence of all the necessary fields
within the total netCDF file. This test is performed on the netCDF files and it assesses
the presence and correctness of all data and attribute fields and the correct syntax
throughout the file. The reference schemes for data and metadata structures and
syntax are described in the deliverable 5.13 of the JERICO-Next project.
As for radials (see section 6.1.1) complementary test to verify some of the fields
contained in the metadata (timestamp, site names, site codes, time zones, site
locations) can be also applied, and the correct values should be established by the
operators.
The result of the test is a scalar QC variable that is entered into the netCDF file after
the test completion.
7.2 Data Density threshold
7.2.1 Definition and computation
This test labels total velocity vectors with a number of contributing radials bigger than
the threshold with a “good data” flag and total velocity vectors with a number of

QA best practices and protocols on QC for radial and total HF radar data
40
contributing radials smaller than the threshold with a “bad data” flag. The output is a
gridded QC variable with the same dimensions of the total velocity components data
variable, containing, for each cell, the flag related to the vector lying in that cell.
For data produced by CODAR systems, the information about the number of
contributing radials has to be inferred from the variables S1CN, S2CN, …, SnCN (n is
the total number of contributing sites), which contain the number of contributing radial
vectors per site to each total.
This test aims at assessing the robustness of the total velocity vectors. The higher is
the number of the contributing radials, the more the resulting total vector can be
considered reliable, provided that the variance of the values is not too high.
7.2.2 Application
As for other QC tests, the correct threshold for the application of this test has to be
chosen in view of the historical data set. Two plots are useful to establish an adequate
threshold. On one hand, we show in Figure 18 the histogram of the number of radials
that are contributing to the total vectors for the BoB installation. The distribution
corresponds to one year of data (2014) and considers all the total grid cells. We can
observe that the most frequent number of radials available for total combination is
between 30 and 60, being the number of totals whose combination is done from less
than 10 radials relatively small. If we look at the distribution of the number of radials
used for total combination in space (Figure 19), the areas where the number of radial is
small are mostly located at the periphery of the radar coverage. So for this case using
a threshold of 10 radial vectors seems adequate.
Figure 18 – Histogram of the number of radials used for total combination on the BoB
HFR system in 2014.

QA best practices and protocols on QC for radial and total HF radar data
41
Figure 19 – (a) Spatial distribution of the mean number of radials used for total
combination. (b) Standard deviation with respect to the mean values.
7.3 Velocity threshold
7.3.1 Definition and computation
This test labels total velocity vectors whose module is bigger than a maximum velocity
threshold with a “bad data” flag and total vectors whose module is smaller than the
threshold with a “good data” flag. The output is a gridded QC variable with the same
dimensions of the total velocity data variable, containing, for each cell, the flag related
to the vector lying in that cell.
It has to be noticed that both CODAR and WERA LLUV data formats contain the zonal
(U) and meridional (V) components of the total velocity vectors. Thus, the module of
the total velocity, that is the quantity to be compared with the threshold, has to be
evaluated from the two components.
For both data type, the module of the total velocity vectors have to be computed using
the variables VELU and VELV present in CODAR and WERA data structure.
The choice of the maximum total velocity threshold has to be made carefully, since
using a tight threshold can lead to the elimination of accurate data. The
recommendation in this case is to examine the time-series of the maximum total
velocity of the data (during at least one complete seasonal cycle for which the proper
functioning of the device is assessed) and consult the literature.
Furthermore, it is also recommended to analyse the impact of the selected threshold
(or of the candidate thresholds) on the velocity fields of the dataset containing at least
one complete seasonal cycle.
Examples of application of this test are provided in the next subsection for the two case
study areas.
7.3.2 Application
With reference to BoB and GoM HFR networks, Figure 20 shows the evolution in time
of the maximum total velocity for both the networks during the year 2014.

QA best practices and protocols on QC for radial and total HF radar data
42
(a) BoB (b) GoM
Figure 20 – Evolution in time of the maximum total velocity during year 2014 for BoB
network (a) and for GoM network (b).
The two graphs show that (for year 2014) the maximum total velocity mainly ranges in
[0 – 4] m/s for BoB network and in [0.2 – 0.8] m/s for GoM network. Based on these
trends, it is possible to define a maximum velocity threshold compatible with the
velocity values measured by the networks. For this example let us consider two
different thresholds, 0.6 m/s and 1 m/s, in order to verify the impact they have on the
velocity fields. This approach is recommended, since it allows for comparing the effects
of different thresholding strategies.
Figure 21 shows (on z axis) the number of times the maximum total velocity threshold
labelled as “bad data” the original velocity fields in BoB and GoM data using the two
thresholds listed above. The z-axis values are normalized on the number of times the
specific cell has content (i.e. is not a NaN value). The colour patches of the surfaces
report the average differences between the original total velocities and the threshold for
each spatial cell. The X-Y axes grid is the exact latitude-longitude grid of the original
data. In this way, it is possible to localize each total velocity cell.
As explained in Section 6.3.2, Figure 21 shows the frequency and the amount of the
intervention of the test and the precise localization of the cell affected by the test, thus
being a valuable aid in the definition of the threshold to apply to data.
Figure 21(a) shows that in BoB data the 0.6 m/s threshold is acting on the whole grid
very often but with small amounts except for the area bounded by latitude in [-3 -2]° E
and longitude in [43.4 43.6]° N, where big differences between velocity and threshold
are present. Figure 21(c) highlights that a bigger threshold (1 m/s) acts less frequently
all over the coverage, keeping big differences in the area described above. Unless a
scientific reason is provided, those data look suspect.
Concerning GoM data, Figure 21(b) shows that the test acts mainly in the central part
of the coverage. As expected from the trend depicted in Figure 20, in Figure 21(d) it is
evident that the 1 m/s threshold is not acting at all on data.
As mentioned before, the recommendation is to investigate any particular situation
emerging from these graphics before to define the operational threshold.

QA best practices and protocols on QC for radial and total HF radar data
43
(a) BoB – velocity threshold 0.6 m/s
(b) GoM – velocity threshold 0.6 m/s
(c) BoB – velocity threshold 1 m/s
(d) GoM – velocity threshold 1 m/s
Figure 21 – Sensitivity to the maximum total velocity threshold. The number of times the
maximum total velocity threshold labelled as “bad data” the original velocity field is
given in the vertical (z) axis, normalized on the number of times the specific cell has
content (i.e. is not a NaN value). The horizontal plane (axes x, y) provides the latitude
and longitude of the total data cells. The colour patches of the surfaces report the
average differences between the total velocities and the threshold for each spatial cell.
Panels (a) and (c) refer to BoB site using 0.6 m/s and 1 m/s as threshold respectively.
Panels (b) and (d) refer to GoM site using 0.6 m/s and 1 m/s as threshold respectively.
As for the tests on radial data, a useful and simple check to do when choosing the
threshold is to examine the evolution in time of the average total velocity with and
without the application of the candidate thresholds. In this way it is possible to have a
quick overview of the effects of the test (that keeps only velocities whose amplitude is
smaller than the threshold) on the velocity field. Figure 22 reports this comparison.

QA best practices and protocols on QC for radial and total HF radar data
44
(a) BoB
(b) GoM
Figure 22 – Evolution in time (December 2014) of the average total velocity with and
without the application of different velocity thresholds for BoB (a) and GoM (b)
networks.
7.4 Variance threshold
7.4.1 Definition and computation
This test labels total velocity vectors whose variance is bigger than a maximum
threshold with a “bad data” flag and total vectors whose variance is smaller than the
threshold with a “good data” flag. The output is a gridded QC variable with the same
dimensions of the total velocity component data variables, containing, for each cell, the
flag related to the vector lying in that cell.
To implement this test on CODAR data, the total velocity variance field has to be
evaluated from the standard deviations of the U and V components of the total vectors.
These standard deviations are contained in the variables UQAL and VQAL present in
the total data structure.
The choice of the maximum variance threshold has to be made carefully, since using a
tight threshold can lead to the elimination of accurate data. The recommendation in this
case is to examine the time-series of the maximum variance of the data (during at least
one complete seasonal cycle for which the proper functioning of the device is
assessed) and consult the literature.
Furthermore, it is also recommended to analyse the impact of the selected threshold
(or of the candidate thresholds) on the velocity fields of the dataset containing at least
one complete seasonal cycle.
Examples of application of this test are provided in the next subsection for the two case
study areas.
7.4.2 Application
Figure 23 shows the evolution in time of the maximum variance for the BoB (a) and
GoM (b) networks, the two case studies presented in Section 5.

QA best practices and protocols on QC for radial and total HF radar data
45
(a) BoB (b) GoM
Figure 23 – Evolution in time of the maximum variance during year 2014 for BoB (a)
and GoM (b) networks.
Based on the variance trends in the two networks (the maximum variance mainly
ranges in [0 – 0.12] m2/s2 for BoB data and in the range [0 – 0.07] m2/s2 for GoM data)
it is possible to define an adequate maximum variance threshold. For this example let
us consider two different thresholds, 0.15 m2/s2 and 0.35 m2/s2, in order to verify the
impact they have on the velocity fields. This approach is recommended for comparing
the effects of different thresholding strategies.
Figure 24 shows (on z axis) the number of times the maximum variance threshold
labelled as “bad data” the original velocity fields in BoB and GoM networks using the
two thresholds listed above. The z-axis values are normalized on the number of times
the specific cell has content (i.e. is not a NaN value). The colour patches of the
surfaces reports the average difference between the original variances and the
threshold for each spatial cell. The X-Y axes grid is the exact latitude-longitude grid of
the original data. In this way, it is possible to localize each radial velocity cell.
As explained in Section 6.3.2, Figure 24 shows the frequency and amount of the
intervention of the test and the precise localization of the cell affected by the test, thus
being a valuable aid in the definition of the threshold to apply to data.
As expected from the trends depicted in Figure 23, Figure 24 shows that the selected
thresholds do not act on BoB and GoM data.
Again, the recommendation is to investigate any particular situation emerging from
these graphics before to define the operational threshold.

QA best practices and protocols on QC for radial and total HF radar data
46
(a) BoB – variance threshold 0.15 m
2/s
2
(b) GoM – variance threshold 0.15 m
2/s
2
(c) BoB – variance threshold 0.35 m
2/s
2
(d) GoM – variance threshold 0.35 m
2/s
2
Figure 24 – Sensitivity to the maximum variance threshold. The number of times the
maximum variance threshold labelled as “bad data” the original velocity field is given
in the vertical (z) axis, normalized on the number of times the specific cell has content
(i.e. is not a NaN value). The horizontal plane (axes x, y) provides the latitude and
longitude of the total data cells. The colour patches of the surfaces report the average
differences between the original variances and the threshold for each spatial cell.
Panels (a) and (c) refer to BoB network using 0.15 m2/s
2 and 0.35 m
2/s
2 as threshold
respectively. Panels (b) and (d) refer to GoM network using 0.15 m2/s
2 and 0.35 m
2/s
2
as threshold respectively.
As for the previous test, a useful and simple check to do when choosing the threshold
is to examine the evolution in time of the average velocity with and without the
application of the candidate thresholds. In this way it is possible to have a quick
overview of the effects of the test (that keeps only velocities whose variance is lower
than the threshold) on the velocity field. Figure 25 reports this comparison.

QA best practices and protocols on QC for radial and total HF radar data
47
(a) BoB
(b) GoM
Figure 25 – Evolution in time (December 2014) of the average total velocity with and
without the application of different variance thresholds for BoB (a) and GoM (b)
networks.
7.5 Balance of contributing radials
7.5.1 Definition and computation
This test checks if the number of radials coming from the different contributing sites are
balanced for the combination into the total velocity vectors. Each data cell is labelled
with a “bad data” flag if the requested balance ratio is not achieved and with a “good
data” flag if the balance ratio is achieved. The output is a gridded QC variable with the
same dimensions of the total velocity component data variables, containing, for each
cell, the flag related to the vector lying in that cell.
In CODAR data, the information about the number of contributing radial vectors per site
to each total vector is contained in the variables S1CN, S2CN, …, SnCN, where n is
the total number of contributing sites.
7.5.2 Application
In Figure 26 we can observe that the most part of the total data produced in the BoB
HFR come from a balanced number of radials (up to 60% coming from one site).
However the number of total data produced with less balanced contribution (with 70 –
80 % coming from one site) is quite high and choosing a threshold too tight would imply
to lose a significant quantity of data. The spatial distribution of the percent of radials
from the different sites is shown in Figure 27. For the BoB installation the areas where
there is less balance are those located near each antenna, where indeed each antenna
produces its highest radial data density. This suggests that the application of this QC
test is not straightforward, at least not using a unique threshold for the whole coverage
area.

QA best practices and protocols on QC for radial and total HF radar data
48
Figure 26 – Histogram of the percent of radials from MATX and HIGE sites
respectively, used for total combination
It has also to be noticed that, if the Data Density test is passed, velocity vectors could
be good even if the balance is poor. The suggested approach is not to choose a
threshold too low, but to keep a non-extremely-unbalanced ratio between the radials
coming from the contributing sites. For instance, a reasonable threshold would be to
keep a limit of not more than 90% from one radial site since a lower one 70-80% would
imply too much data loss. Another strategy could be applying the test only when the
number of radials from one site is very low, in order not to lose much info near the
antennas.
(a)
(b)
Figure 27 – (a) Spatial distribution of the percent of number of radials coming from the
different contributing sites. (b) Standard deviation with respect to the mean values.

QA best practices and protocols on QC for radial and total HF radar data
49
7.6 GDOP Threshold
7.6.1 Definition and computation
This test labels total velocity vectors whose GDOP is bigger than a maximum threshold
with a “bad data” flag and the vectors whose GDOP is smaller than the threshold with a
“good data” flag. The output is a gridded QC variable with the same dimensions of the
total velocity component data variables, containing, for each cell, the flag related to the
vector lying in that cell.
To implement this test on CODAR data, the GDOP threshold has to be applied to the
variable CQAL present in the CODAR total files. This variable contains the covariance
matrix of the angle of incidence of radial vectors. The GDOP error is evaluated as the
square root of the trace of this matrix. This means that the GDOP value constraints the
range of incidence angles allowed for combining radial vectors into total vectors.
For WERA systems, the GDOP information is contained in the file GDOP.dat. To
enable WERA systems to generate this file, it is necessary to insert the line
“WRITE_GDO=.TRUE.” in the configuration file in the file params.cfg.
The choice of the maximum GDOP threshold has to be made carefully, since using a
tight threshold can lead to the elimination of accurate data and to a dramatic reduction
of the velocity field coverage. The recommendation in this case is to examine the time-
series of the maximum GDOP and the related incidence angle ranges (during at least
one complete seasonal cycle for which the proper functioning of the device is
assessed) and consult the literature.
Furthermore, it is also recommended to analyse the impact of the selected threshold
(or of the candidate thresholds) on the velocity fields of the dataset containing at least
one complete seasonal cycle.
Examples of application of this test are provided in the next subsection for the two case
study areas.
7.6.2 Application
Figure 28 shows the evolution in time of the maximum GDOP and related incidence
angle ranges for the BoB (a) and GoM (b) networks, the two case studies presented in
Section 5.

QA best practices and protocols on QC for radial and total HF radar data
50
(a) BoB (b) GoM
Figure 28 – Evolution in time of the maximum GDOP and related maximum and
minimum incidence angles during year 2014 for BoB (a) and GoM (b) networks.
Figure 28 shows that maximum GDOP ranges in [2 - 5] in BoB network. This means
that radial vectors are mainly combined when lying in the range [45 - 130]°. For GoM
network, maximum GDOP ranges in [0 -1.4], thus meaning that radial vectors are
mainly combined when lying in the range [30 - 150]°. Based on these trends, it is
possible to define an adequate maximum GDOP threshold. For this example let us
consider two different thresholds, 2.20 and 1.41, in order to verify the impact they have
on the velocity fields. This approach is recommended for comparing the effects of
different thresholding strategies.
Figure 29 shows (on z axis) the number of times the maximum GDOP threshold
labelled as “bad data” the original velocity fields in BoB and GoM networks using the
two thresholds listed above. The z-axis values are normalized on the number of times
the specific cell has content (i.e. is not a NaN value). The colour patches of the
surfaces report the average difference between the original GDOP and the threshold
for each spatial cell. The X-Y axes grid is the exact latitude-longitude grid of the original
data. In this way, it is possible to localize each radial velocity cell.
As explained in Section 6.3.2, Figure 29 shows the frequency and amount of the
intervention of the test and the precise localization of the cell affected by the test, thus
being a valuable aid in the definition of the threshold to apply to data.
Figure 29 (a) and Figure 29 (b) show that the first threshold is acting very rarely and
always on the border of the coverage for both networks. This is a consistent result,
since the coverage borders are usually affected by higher GDOP. As expected, Figure
29 (c) and Figure 29 (d) show that the second threshold is more rigid, thus acting more
frequently. Anyway, the threshold mainly operates on the coverage borders.

QA best practices and protocols on QC for radial and total HF radar data
51
(a) BoB – GDOP threshold 2.20
(b) GoM – GDOP threshold 2.20
(c) BoB – GDOP threshold 1.41
(d) GoM – GDOP threshold 1.41
Figure 29 – Sensitivity to the maximum GDOP threshold. The number of times the
maximum GDOP threshold labelled as “bad data” the original velocity field is given in
the vertical (z) axis, normalized on the number of times the specific cell has content (i.e.
is not a NaN value). The horizontal plane (axes x, y) provide the latitude and longitude
of the total data cells. The colour patches of the surfaces report the average differences
between the original GDOP and the threshold for each spatial cell. Panels (a) and (c)
refer to BoB network using 2.20 and 1.41 as threshold respectively. Panels (b) and (d)
refer to GoM network using 2.20 and 1.41 as threshold respectively.
As for the previous tests, the recommendation is to investigate any particular situation
emerging from these graphics before to define the operational thresholds.
It has to be noticed that limiting the GDOP, i.e. limiting the incidence angle range for
radial vector combination, means reducing the coverage of the velocity field, since only
the total vectors whose contributing radials have an allowed incidence angle are kept in
the field. Figure 30 shows the different coverages of the velocity fields for the two case
studies applying the two thresholds used above, with respect to the original data. As
expected, the second threshold reduces the coverage in a significant way. This
visualization is very useful to manage the trade off in selecting the thresholds.
Another way to assess the impact of GDOP thresholding on the spatial coverage is to
analyse the evolution in time of the number of velocity vectors present in the field,
without any GDOP thresholding and with different GDOP thresholds, as shown in
Figure 31.

QA best practices and protocols on QC for radial and total HF radar data
52
(a) BoB
Original total velocity field
(b) GoM
Original total velocity field
(c) BoB
GDOP threshold = 2.20
(d) GoM
GDOP threshold = 2.20
(e) BoB
GDOP threshold = 1.41
(f) GoM
GDOP threshold = 1.41
Figure 30 – Total velocity maps without and with applying the GDOP thresholds for
BoB and GoM networks. Panels (a), (c) and (e) refer to BoB network using no GDOP
thresholding, 2.20 and 1.41 as threshold respectively. Panels (b), (d) and (f) refer to
GoM network using no GDOP thresholding, 2.20 and 1.41 as threshold respectively.
As expected, the lower the GDOP threshold, the smaller the spatial coverage and the
fewer the velocity vectors.

QA best practices and protocols on QC for radial and total HF radar data
53
(a) BoB (b) GoM
Figure 31 – Evolution in time of the number of velocity vectors present in the total
velocity field with and without applying GDOP thresholds for BoB (a) and GoM (b)
networks.
As for the previous test, a useful and simple check to do when choosing the threshold
is to examine the evolution in time of the average velocity with and without the
application of the candidate thresholds. In this way it is possible to have a quick
overview of the effects of the test (that keeps only velocities whose GDOP is lower than
the threshold) on the velocity field. Figure 32 reports this comparison and shows that
GDOP threshold has a significant effect on the average total velocity since it is a very
effective method to exclude areas with high current uncertainty and high inaccurate
speeds.
(a) BoB
(b) GoM
Figure 32 – Evolution in time (December 2014) of the average total velocity with and
without the application of different GDOP thresholds for BoB (a) and GoM (b)
networks.

QA best practices and protocols on QC for radial and total HF radar data
54
8 Conclusions
HFRs offer the means to map ocean surface currents over wide areas and with a good
temporal resolution. To make HFR information beneficial for the integrated
management of coastal areas and ensure the HFRs play an increasing role in the
overall operational oceanography marine services, the quality of the data has to be
controlled operationally.
Two major steps towards optimized HFR data quality are the Quality Assessment of
the measuring processes and the operational Quality Control of the data.
QA involves processes that are mostly employed with hardware. Since, HFRs are land-
based remote sensing platforms, the operations of maintenance and restitution of
hardware components can be relatively easy and less costly. However several aspects
at different stages have to be taken into account from the beginning of the antenna
installation to ensure the best performances of the equipment. The main QA
procedures for HFR operation are today quite well defined. On this base, this document
has provided an enriched description of the existing protocols and basic
recommendations to follow.
QC involves follow-on steps that support the delivery of high quality data involving
processes employed with software. While all the radars share the same principles of
operation, differences in signal transmission, reception and processing yield variations
in metadata, quality control metrics and spatial registration. Thus, in addition to the
efforts made by the HFR community during the fruitful days of the INCREASE HFR
Experts Workshop on defining the main QC procedures necessary to the integration of
HFRs into CMEMS operational services, the aim of this document is to showcase the
application of this procedures to real data in order to provide practical
recommendations on their implementation.
Although the two chosen systems for the exercises are CODAR DF HFRs, a special
effort has been done to consider the particularities of WERA HFRs. A detailed
definition and a practical description of the different tests and how should they be
computed for radial and total data is provided. The election of the required thresholds
has proven not to be straightforward for most of the cases. The general
recommendation is to examine the historical data time-series during at least one
complete seasonal cycle for which the proper functioning of the device is assessed,
and consult the literature. In addition, different useful diagnostics and approaches to
guide the operators in the choice of adequate thresholds and for comparing the effects
of different thresholding strategies are provided.
From the ensemble of tests checked for radial and total data in this work, the “Balance
of contributing radial test” (QC test on total data) is the only one that has shown major
technical drawbacks. Our analysis suggests that the application of this QC test is not
straightforward, at least not using a unique threshold for the whole coverage area.
Accordingly, our recommendation would be not to consider it as a mandatory test.

QA best practices and protocols on QC for radial and total HF radar data
55
9 Bibliography
D. E. Barrick, M. Evans, and B. Weber, 1977. Ocean surface currents mapped by
radar, Science, vol. 198, no. 4313, pp. 138–144.
Barrick, D.E. and B.J. Lipa, 1986: Correcting for distorted antenna patterns in CODAR
ocean surface measurements. IEEE J. Ocean. Eng, OE-11, 304-309.
Corgnati, L.; Mantovani, C.; Griffa, A.; Bellomo, L.; Carlson, D.F.; Magaldi, M.G.; Berta,
M.; Pazienza, G.; D'Adamo, R., 2015. "The ISMAR high frequency coastal radar
network: Monitoring surface currents for management of marine resources," in
OCEANS 2015 - Genova , vol., no., pp.1-8, 18-21 May 2015. doi:
10.1109/OCEANS-Genova.2015.7271524. WOS:000380485500206
Fernandez D.M. and Paduan, J.D., 1996. Simultaneous CODAR and OSCR
measurements of ocean surface currents in Monterey Bay,” in Geoscience and
Remote Sensing Symposium, 1996. IGARSS’96. Remote Sensing for a
Sustainable Future. International, vol. 3. IEEE, pp. 1749–1752.
Gurgel, K-W., Antonischki, G., Essen, H-H. and Schlick, T., 1999. Wellen radar
(WERA): a new ground-wave HF radar for ocean remote sensing, Coastal
Engineering, vol. 37, no. 3, pp. 219–234.
Kohut, J. T., Glenn, S. M., 2003. Improving HF radar surface current measurements
with measured antenna beam patterns. J. Atmos. Ocean. Tech., 20, 1303–1316,
2003.
Laws K, Paduan J., Vescky J., 2010. Estimation and Assessment of Errors Related to
Antenna Pattern Distortion in CODAR SeaSonde High-Frequency Radar Ocean
Current Measurements, Journal of atmospheric and oceanic Technology, June
2010,DOI: http://dx.doi.org/10.1175/2009JTECHO658.1
Poulain, P.-M., 2001. Adriatic Sea surface circulation as derived from the drifter data
between 1990 and 1999, J. Mar. Syst., 29, 3–32.
Rubio A, Solabarrieta L, González M, Mader J, Castanedo S, Medina R, Charria G &
Aranda JA, 2013. Surface circulation and Lagrangian transport in the SE Bay of
Biscay from HF radar data. OCEANS - Bergen, 2013
Solabarrieta L, Rubio A, Castanedo S, Medina R, Fontán A, González M, Fernández V,
Charria G & Hernández C, 2014. Surface water circulation patterns in the
southeastern Bay of Biscay: New evidences from HF radar data. Cont. Shelf.
Res., 74: 60-76.
Stewart, R.H. and Joy, J.W., 1974. HF radio measurements of surface currents,” in
Deep Sea Research and Oceanographic Abstracts, vol. 21, no. 12. Elsevier, pp.
1039–1049.
Taillandier, V., A. Griffa, P. M. Poulain, R. Signell, J. Chiggiato, and S. Carniel, 2008.
Variational analysis of drifter positions and model outputs for the reconstruction of
surface currents in the central Adriatic during fall 2002, J. Geophys. Res., 113,
C04004, doi:10.1029/2007JC004148.
U.S. IOOS - Integrated Ocean Observing System, 2016a. Manual for Real-Time
Quality Control of High Frequency Radar Surface Currents Data: A Guide to
Quality Control and Quality Assurance of High Frequency Radar Surface

QA best practices and protocols on QC for radial and total HF radar data
56
Currents Data Observations. 57 pp.
(https://cordc.ucsd.edu/projects/mapping/documents/SCCOOS-BestPractices.pdf)
U.S. IOOS - Integrated Ocean Observing System, 2016b. Manual for Real-Time
Quality Control of High Frequency Radar Surface Currents Data: A Guide to
Quality Control and Quality Assurance of High Frequency Radar Surface
Currents Data Observations. 58 pp. (https://ioos.noaa.gov/wp-
content/uploads/2016/06/ HFR_QARTOD_Manual_05_26_16.pdf)