Embed Size (px)
Citation preview

д-р Никола Тунески
МАТЕМАТИКА 1
- предавања и задачи за вежбање -
(работна верзија)

СОДРЖИНА
Предговор
1. Детерминанти од втор и трет ред 1.1. Детерминанти од втор ред 1.2. Детерминанти од трет ред Задачи за вежбање
2. Вектори
2.1. Собирање и одземање на вектори 2.2. Множење на вектор со скалар 2.3. Линеарна комбинација на вектори 2.4. Вектори во координатна форма 2.5. Скаларен производ 2.6. Векторски производ 2.7. Мешан производ Задачи за вежбање
3. Аналитичка геометрија
3.1. Поделба на отсечка во даден однос 3.2. Рамнина
3.2.1. Равенка на рамнина 3.2.2. Взаемна положба на две рамнини. 3.2.3. Взаемна положба на три рамнини.
3.3. Права 3.4. Взаемна положба на права и рамнина 3.5. Растојанија Задачи за вежбање
4. Одбрани делови од реални броеви
4.1. Математичка индукција 4.2. Биномна формула 4.3. Равенки и неравенки со апсолутна вредност Задачи за вежбање
5. Низи од реални броеви
5.1. Дефиниција. Ограниченост и монотоност на низа 5.2. Точка на натрупување и конвергенција на низа Задачи за вежбање
6. Реални функции
6.1. Дефиниција и основни поими 6.2. Начини на задавање на реална функција
6.2.1. Табеларно и со помош на график 6.2.2. Аналитично задавање на функција (со формула)
6.3. Инверзна функција 6.4. Операции со функции и сложена функција 6.5. Ограниченост, монотоност и екстреми на реална функција 6.6. Елементарни функции 6.7. График на функција добиена од елементарна функција Задачи за вежбање

7. Граници и непрекинатост на функции
7.1. Граница на функција 7.2. Непрекинатост на функција 7.3. Еднострани граници и непрекинатост на интервал 7.4. Граница во бесконечност, хоризонтална и коса асимптота 7.5. Конвергенција кон бесконечност и вертикални асимптоти Задачи за вежбање
8. Извод на функција од една реална променлива
8.1. Дефиниција на извод и негови својства 8.2. Пресметка на извод на функција
8.2.1. Таблицата на изводи на елементарни функции 8.2.2. Правила за пресметка на извод
8.3. Геометриско и кинематско толкување на изводот 8.4. Извод од параметарски и имплицитно зададена функција 8.5. Теореми за изводите
8.5.1. Теорема на Лопитал (Лопиталово правило) 8.5.2. Теорема на Ферма 8.5.3. Теорема на Рол 8.5.4. Теорема на Лагранж
8.6. Интервали на монотоност и екстреми на функција 8.7. Примена на извод за решавање на екстремални проблеми 8.8. Вдлабнатост и испакнатост на функција и превојни точки 8.9. Испитување на текот и скицирање на графикот на функција 8.10. Диференцијал Задачи за вежбање
Додаток 1. Испитни прашања Додаток 2. Поважни математички формули

ПРЕДГОВОР

1-1
1. Детерминанти од втор и трет ред
1.1. Детерминанти од втор ред
Детерминанта од втор ред е квадратна шема од броеви (во општ случај елементи: броеви, функции...) чија вредност се пресметува на следниот начин:
.bcaddcba
−=
Пример 1.1.1:
( ) 106432141234
=+=−⋅−⋅=−
, xxxxxxx
x 2222 sincos1cos1tgctg
tgcos1ctg
=−=⋅−⋅= .
Детерминантите од втор ред ги имаат следните особини:
1. Вредноста на детерминантата не се менува ако редиците и колоните си ги заменат местата, т.е.,
dbca
bcaddcba
=−= .
Пример 1.1.2:
1342132
=−= и 1342312
=−= .
2. Ако две редици (колони) си ги заменат местата детерминантата го менува
знакот, т.е.,
( )badc
adbcbcaddcba
−=−−=−= .
Пример 1.1.3:
1342132
=−= и 1433221
−=−= .
3. Ако детерминантата има две исти редици (колони) нејзината вредност е нула,
т.е.,
0=−= ababbaba
.
Пример 1.1.4:
0663232
=−= .
4. Ако елементите на една редица (колона) се помножат со некој број тогаш и
детерминантата е помножена со тој број, т.е.,
( )dckbka
kcbkadcbadkdcba
k =−=−=⋅ .
Пример 1.1.5:
4121621
12821
3424=−==
⋅⋅ и ( ) 414344
2132
4 =⋅=−⋅=⋅ .

1-2
5. Ако елементите на една редица (колона) се пропорционални со елементите на друга редица (колона) тогаш вредноста на детерминантата е нула, т.е.,
0=−= kabakbkbkaba
.
Пример 1.1.6:
018189632
=−= .
6. Ако елементите на една редица (колона) се помножат со некој број и се додадат
на елементите на друга редица (колона) тогаш вредноста на детерминантата не се менува, т.е.,
( ) ( )dckdbkca
kdbcdkcabcaddcba ++
=+−+=−= .
Пример 1.1.7:
1342132
=−= и 19102195
21323312
=−==⋅+⋅+
.
1.1.1. Примена на детерминанти од втор ред за решавање на систем од две линеарни равенки со две непознати
Нека е даден системот од две линеарни равенки со две непознати
⎩⎨⎧
=+=+
222
111
cybxacybxa
. (1.1)
Од него може да се формираат следните детерминанти
– 22
11
baba
D = , детерминанта составена од коефициентите пред непознатите;
– 22
11
bcbc
Dx = , во детерминанта D елементите од првата колона се заменуваат со
слободните коефициенти од системот; и
– 22
11
caca
Dx = , во детерминанта D елементите од втората колона се заменуваат
со слободните коефициенти од системот. За решенијата на системот (1.1) се разгледуваат следните случаи:
1. Ако 0≠D тогаш системот има единствено решение и тоа се пресметува со формулите:
DD
x x= и D
Dy y= .
Геометриско толкување: правите дефинирани со равенките од системот се сечат во една точка. Пример 1.1.8:
⎩⎨⎧
−=+=+
13852
yxyx
, 131352
−==D , 131158=
−=xD , 26
1382
−=−
=yD .
Системот има единствено решение, и тоа e: 1−=x и 2=y .

1-3
2. Ако 0=== yx DDD тогаш системот има бесконечно многу решенија. Геометриско толкување: правите дефинирани со равенките од системот се поклопуваат. Пример 1.1.9:
⎩⎨⎧
=+=+
1296432
yxyx
, 0=== yx DDD .
Системот има бесконечно многу решенија опишани со ⎟⎠⎞
⎜⎝⎛ −
324, xx .
3. Ако 0=D , а 0≠xD или 0≠yD , тогаш системот нема решение.
Геометриско толкување: правите дефинирани со равенките од системот се паралелни. Пример 1.1.10:
⎩⎨⎧
=+=+
8225
yxyx
, 0=D , 02 ≠=xD .
Системот нема решение.
1.2. Детерминанти од трет ред Детерминанта од трет ред е квадратна шема од броеви (во општ случај елементи: броеви, функции...):
333231
232221
131211
aaaaaaaaa
.
Вредноста на детерминантата од трет ред може да се пресмета со:
1. Сарусово правило. Пример 1.2.1:
( ) ( ) ( ) ( ) ( ) ( )[ ] 1731023241121413301221
1132
021311
432−=⋅−⋅+⋅−⋅−+⋅⋅−−⋅−⋅+⋅−⋅+⋅⋅=
−−
−−−
2. Со развивање по редици (колони).
Пример 1.2.2:
( ) 1714336221
114
0131
30231
2021311
432−=⋅+⋅−−⋅=
−−⋅+
−−⋅−
−−
⋅=−
−−
Забелешка: Знаците при развивањето се менуваат согласно следниот распоред:
+−+−+−+−+
.
Детерминантите од трет ред имаат исти особини како детерминантите од втор ред.

1-4
1.2.1. Примена на детерминанти од трет ред за решавање на систем од три линеарни равенки со три непознати
Нека е даден системот од три линеарни равенки со три непознати
⎪⎩
⎪⎨
⎧
=++=++=++
3333231
2232221
1131211
bzayaxabzayaxabzayaxa
. (1.2)
Од него може да се формираат следните детерминанти
– 333231
232221
131211
aaaaaaaaa
D = , составена од коефициентите пред непознатите;
– 33323
23222
13121
aabaabaab
Dx = , во детерминанта D елементите од првата колона се замену-
ваат со слободните коефициенти од системот;
– 33331
23221
13111
abaabaaba
Dy = , во детерминанта D елементите од втората колона се замену-
ваат со слободните коефициенти од системот;
– 33231
22221
11211
baabaabaa
Dz = , во детерминанта D елементите од третата колона се замену-
ваат со слободните коефициенти од системот. За решенијата на системот (1.2) се разгледуваат следните случаи:
1. Ако 0≠D тогаш системот има единствено решение и тоа се пресметува со формулите:
DD
x x= , D
Dy y= и
DD
z z= .
Пример 1.2.3:
⎪⎩
⎪⎨
⎧
=−+−=−+=+−
08532
123
zyxzyx
zyx, 3
111532
123−=
−−−
−=D , 6
110538
121−=
−−
−=xD ,
9101582
113−=
−−−=yD , 3
011832123
−=−
−=zD
Системот има единствено решение, и тоа e: 2=x , 3=y и 1=z .
2. Ако 0==== zyx DDDD тогаш системот има бесконечно многу решенија. Пример 1.2.4:
⎪⎩
⎪⎨
⎧
−=−−−=−+
=−+
2152
142
zyxzyxzyx
, 0==== zyx DDDD .
Системот има бесконечно многу решенија опишани со ( )zzz ,1,21 ++− .
3. Ако 0=D , а 0≠xD или 0≠yD или 0≠zD , тогаш системот нема решение.

1-5
Пример 1.2.5:
⎪⎩
⎪⎨
⎧
−=−−=−−=+−
322422522
zyxzyx
zyx, 0=D , 021≠−=xD .
Системот нема решение.
Дискусија на решенијата на даден систем во однос на некој параметар кој се содржи во него илустрирана е со следниот пример. Пример 1.2.6: Решенијата на дадениот систем од три линеарни равеники со три непознати да се дискутираат во однос на параметарот а
⎪⎩
⎪⎨
⎧
=++=++=++
102
1
zyxzayx
zyax. (1.3)
Решение: Прво се пресметуваат детерминантите:
231112111
2 +−== aaaa
D , 011120111== aDx ,
( )aaa
Dy −=−== 122211120111
, ( )11110111
2 −=−== aaaaaa
Dz .
Понатаму, се решава равенката 0=D , т.е., 0232 =+− aa
и таа има решенија 1=a и 2=a . Сега, за 1=a имаме 0=D , 0=xD , 0=yD и 0=zD ;
и за 2=a имаме 0=D , 0=xD , 2−=yD и 2=zD .
Па следуваат следните заклучоци: – Ако 1≠a и 2≠a тогаш 0≠D , односно системот (1.3) има единствено решение
023
02
=+−
==aaD
Dx x , ( )
( )( ) aaaa
DD
y y
−=
−−−
==2
221
12 и
( )( )( ) 221
1−
=−−
−==
aa
aaaa
DD
z z .
– Ако 1=a тогаш 0==== zyx DDDD , односно системот (1.3) има бесконечно многу решенија.
– Ако 2=a тогаш 0=D и 02 ≠−=yD , односно системот (1.3) нема решение. Хомоген систем равенки е систем кај кој слободните членови се нули, т.е.,
⎪⎩
⎪⎨
⎧
=++=++=++
000
333231
232221
131211
zayaxazayaxazayaxa
.
Кај него секогаш 0=== zyx DDD , па затоа важи следното: 1. Ако 0≠D тогаш системот има единствено решение 0=== zyx и тоа се
нарекува тривијално. 2. Ако 0=D тогаш системот има бесконечно многу решенија, што значи и
нетривијални.

1-6
Пример 1.2.7: Хомогениот систем
⎪⎩
⎪⎨
⎧
=++=++=++
0023
03
zyxzyx
zyx
има единствено решение (тривијалното 0=== zyx ) бидејќи
02111231113
≠==D ,
додека системот
⎪⎩
⎪⎨
⎧
=−−=−+=−+
0052042
zyxzyxzyx
има бесконечно многу решенија бидејќи
0111512421=
−−−−
=D .
Задачи за вежбање
Решенијата на дадениот систем од три линеарни равеники со три непознати да се дискутираат во однос на параметарот а
1.1. ⎪⎩
⎪⎨
⎧
−=++=++=++
1222
23
zyaxazyx
azyx 1.2.
⎪⎩
⎪⎨
⎧
=++−=++
=++
43142
2
zyaxazyx
azyx 1.3. ( )
( )⎪⎩
⎪⎨
⎧
=+−+=−++
=++
57123222
1
zyaxazaayx
zyx
2-1
2. Вектори
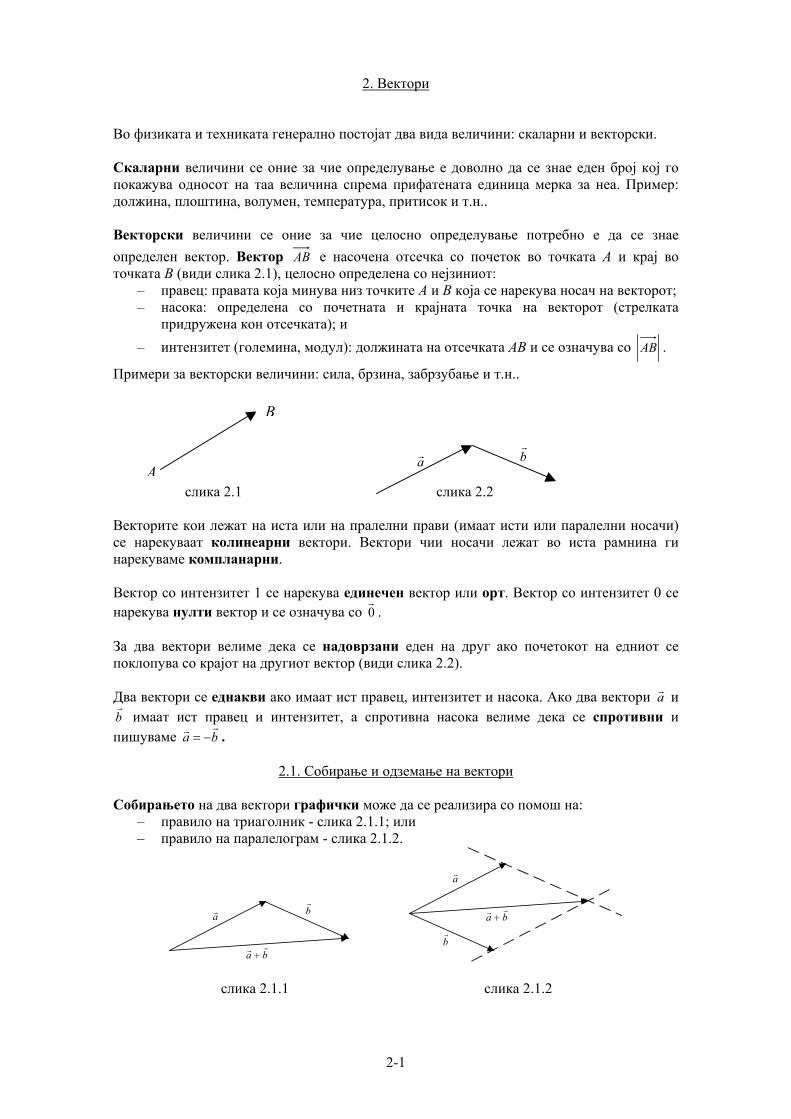
Во физиката и техниката генерално постојат два вида величини: скаларни и векторски. Скаларни величини се оние за чие определување е доволно да се знае еден број кој го покажува односот на таа величина спрема прифатената единица мерка за неа. Пример: должина, плоштина, волумен, температура, притисок и т.н.. Векторски величини се оние за чие целосно определување потребно е да се знае определен вектор. Вектор AB е насочена отсечка со почеток во точката А и крај во точката B (види слика 2.1), целосно определена со нејзиниот:
– правец: правата која минува низ точките А и B која се нарекува носач на векторот; – насока: определена со почетната и крајната точка на векторот (стрелката
придружена кон отсечката); и – интензитет (големина, модул): должината на отсечката AB и се означува со AB .
Примери за векторски величини: сила, брзина, забрзубање и т.н.. слика 2.1 слика 2.2 Векторите кои лежат на иста или на пралелни прави (имаат исти или паралелни носачи) се нарекуваат колинеарни вектори. Вектори чии носачи лежат во иста рамнина ги нарекуваме компланарни. Вектор со интензитет 1 се нарекува единечен вектор или орт. Вектор со интензитет 0 се нарекува нулти вектор и се означува со 0
r.
За два вектори велиме дека се надоврзани еден на друг ако почетокот на едниот се поклопува со крајот на другиот вектор (види слика 2.2). Два вектори се еднакви ако имаат ист правец, интензитет и насока. Ако два вектори a
r и br
имаат ист правец и интензитет, а спротивна насока велиме дека се спротивни и пишуваме ba
rr−= .
2.1. Собирање и одземање на вектори
Собирањето на два вектори графички може да се реализира со помош на:
– правило на триаголник - слика 2.1.1; или – правило на паралелограм - слика 2.1.2.
ar b
r
barr
+
ar
br
barr
+
слика 2.1.1 слика 2.1.2
Аbr
ar
B

2-2
Собирањето на вектори ги има следните особини: – комутативност: abba
rrrr+=+ ;
– асоцијативност: ( ) ( ) cbacbarrrrrr
++=++ ; – нулти елемент: aaa
rrrrr=+=+ 00 ;
– неутрален елемент: ( ) ( ) 0rrrrr
=+−=−+ aaaa . Оземањето на два вектори се сведува на собирање со спротивниот вектор:
( )babarrrr
−+=− Графичко одземање на вектори со помош на два различни методи е прикажано на сликата 2.1.3:
ar
br
( )babarrrr
−+=−
ar
br
−
barr
−
ar
br
слика 2.1.3
2.2. Множење на вектор со скалар
Производ на вектор a
r и скалар λ е вектор brопределен на следниот начин:
– векторот br
има ист правец со векторот ar ;
– интензитетот на векторот br
е еднаков на производот ar
⋅λ , т.е., abrr
⋅= λ ;
– насоката на векторот br
еднаква е со насоката на векторот ar за 0>λ и спротивна
од насоката на векторот ar за 0<λ .
Пример 2.2.1: За даден вектор ar гарфички да се определат векторите a
r2 , a
r
21 и a
r
23
− .
Решение: Решението е дадено на сликата 2.2.1.
ar
ar
2
ar2a
r
ara
r
23
−
слика 2.2.1
Својства на множењето на вектор со скалар:
– ако ar и b
r се колинеарни вектори тогаш постои скалар λ таков што ab
rr⋅= λ ;
– множење на вектор со два скалари: ( ) ( ) aarr⋅⋅=⋅⋅ μλμλ ;
– множење на вектор со збир на два скалари: ( ) aaarrr⋅+⋅=⋅+ μλμλ ;
– множење на збир на два вектори со скалар: ( ) babarrrr⋅+⋅=+⋅ λλλ .
Со множењето на вектор со скалар поврзани се следните закони за кратење:
– 00 =⇔=⋅ λλ ar или 0
rr=a ;
– 0rr
≠a и μλμλ =⇒⋅=⋅ aarr ;
– 0≠λ и babarrrr
=⇒⋅=⋅ λλ . Делење на вектор a
r со скалар λ се сведува на множење на вектор ar со скалар λ1 .

2-3
2.3. Линеарна комбинација на вектори
Нека naaa ,,, 21 K се вектори и nλλλ ,,, 21 K се реални броеви. Тогаш збирот
nn aaa ⋅++⋅+⋅ λλλ L2211
се нарекува линеарна комбинација на векторите naaa ,,, 21 K . Ако за даден вектор br
постојат реални броеви nμμμ ,,, 21 K такви што
nn aaab ⋅++⋅+⋅= μμμ Lr
2211
тогаш велиме дека векторот br
е линеарна комбинација од векторите naaa ,,, 21 K . Векторите naaa ,,, 21 K велиме дека се линеарно зависни ако постојат реални броеви
nλλλ ,,, 21 K такви што барем еден од нив е различен од нула и важи
02211
rL =⋅++⋅+⋅ nn aaa λλλ .
Векторите naaa ,,, 21 K велиме дека се линеарно независни ако
02211
rL =⋅++⋅+⋅ nn aaa λλλ
важи само за 021 ==== nλλλ L . Својства:
– ar и b
r се колинеарни ⇔ a
r и br
се линеарно зависни. – Нека a
r и br
се колинеарни. Тогаш важи следната импликација 00 ==⇒=⋅+⋅ μλμλ
rrrba .
– ar , b
r и c
r се компланарни ⇔ ar и b
r се линеарно зависни.
– Ако векторите ar , b
r и c
r се линеарно независни тогаш секој вектор dr
може на единствен начин да се претстави како нивна линеарна комбинација, т.е., постојат единствени скалари 321 ,, λλλ такви што
cbadrrrr⋅+⋅+⋅= 321 λλλ .
2.4. Вектори во координатна форма
Нека ir
, jr
и kr
се единечни вектори (ортови) со следните особини (види слика 2.4.1): – сите три вектори за почетна точка го имаат координатниот почеток на xyz
координатниот систем; – носачи на векторите се x, y и z оските, содветно; – сите три вектори се насочени кон позитивната насока на соодветната оска.
Векторите i
r, jr
и krсе линеарно независни
и согласно последното својство од претхо-дната точка секој вектор d
r може на
единствен начин да се претстави како нивна линеарна комбинација, т.е., постојат единствени скалари zyx λλλ ,, такви што
kjid zyx
rrrr⋅+⋅+⋅= λλλ .
Ова разложување скратено се запишува ( )zyxd λλλ ,,=
r. Векторот d
r има почетна
точка во координатниот почеток и крајна точка ( )zyxA λλλ ,, (види слика 2.4.1).
x
y
z
kr
ir
jr
xλ
yλ
zλ
dr
слика 2.4.1

2-4
Нека ( )zyx aaaa ,,=r , ( )zyx bbbb ,,=
r и ( )zyx cccc ,,=
r се три вектори во координатна форма. Тогал важи следното:
– zzyyxx babababa ===⇔= ,,rr
– ( )zzyyxx babababa ±±±=± ,,rr
Пример 2.4.1: ( )3,1,2=ar , ( )0,1,3=b
r, ( ) ( )3,2,503,11,32 =+++=+ ba
rr .
– ( )zyx aaaa ⋅⋅⋅=⋅ λλλλ ,,r
Пример 2.4.2: ( )3,1,2=ar , 3=λ , ( ) ( ) ( )9,3,633,13,233,1,23 =⋅⋅⋅=⋅=⋅a
rλ .
– ar и b
r се колинеарни (линеарно зависни)
z
z
y
y
x
x
ba
ba
ba
==⇔
Пример 2.4.3: ( )3,1,2=ar , ( )6,2,4=b
r се колинеарни (линеарно зависни) бидејќи
63
21
42
== .
– ar , b
r и c
r се компланарни (линеарно зависни) 0=⇔
zyx
zyx
zyx
cccbbbaaa
.
Пример 2.4.4: Векторите ( )4,2,1 −=ar , ( )5,1,2 −=b
r и ( )6,2,4 −−=c
r се колинеарни (линеарно зависни) бидејќи
0624512421=
−−−−
.
– Ако точката ( )zyx aaaA ,, е почеток, а точката ( )zyx bbbB , е крај на еден вектор тогаш тој вектор во координатна форма е
( )zzyyxx abababAB −−−= ,, . Пример 2.4.5: Дадени се точките ( )3,1,2A и ( )5,2,4B . Тогаш
( ) ( )2,1,235,12,24 =−−−=AB .
2.5. Скаларен производ
Нека ar и b
r се два ненулти вектори. Тогаш
нивниот скаларен производ barr⋅ е реален
број дефиниран со ( )bababa
rrrrrr,cos∠⋅⋅=⋅ .
ar
br
( )barr
,∠
Ако векторите a
r и br
се дадени во координатна форма, т.е., ( )zyx aaaa ,,=
r и ( )zyx bbbb ,,=r
тогаш нивниот скалрен производ се пресметува со формулата
zzyyxx babababa ⋅+⋅+⋅=⋅rr .
Пример 2.5.1: Скаларниот производ на векторите ( )3,1,2=a
r и ( )0,1,3=br
е 7031132 =⋅+⋅+⋅=⋅ba
rr .

2-5
Својства на скаларниот производ:
– abbarrrr⋅=⋅
Пример 2.5.2: ( )3,1,2=ar , ( )0,1,3=b
r, 7031132 =⋅+⋅+⋅=⋅ba
rr , 7301123 =⋅+⋅+⋅=⋅ab
rr.
– ( ) ( ) ( )bababarrrrrr⋅⋅=⋅⋅=⋅⋅ λλλ
Пример 2.5.3: ( )3,1,2=ar , ( )0,1,3=b
r, 2=λ ,
( ) 1472 =⋅=⋅⋅ barr
λ , ( ) ( ) 146,2,4 =⋅=⋅⋅ bbarrr
λ , ( ) ( ) 140,2,6 =⋅=⋅⋅ abarrr
λ
– ( ) cabacbarrrrrrr⋅+⋅=+⋅
Пример 2.5.4: ( )4,2,1 −=ar , ( )5,1,2 −=b
r, ( )2,2,4 −−=cr ,
( ) ( ) 327,1,6 =−−⋅=+⋅ acbarrrr , 32824 =+=⋅+⋅ caba
rrrr – baba
rrrr⊥⇔=⋅ 0
Пример 2.5.5: ( )3,1,2=ar , ( )2,4,1 −=b
r, ( ) 0234112 =−⋅+⋅+⋅=⋅ba
rr и затоа векторите ar и b
r се взаемно нормални.
– 2aaarrr
=⋅ , односно 2aaaarrrr
=⋅= – 222
zyx aaaa ++=r Пример 2.5.6: ( )3,1,2=a
r , 14312 222 =++=ar .
– ( )ba
baba rr
rrrr
⋅
⋅=∠ ,cos
– ( )222222
,coszyxzyx
zzyyxx
bbbaaa
babababa
++⋅++
⋅+⋅+⋅=∠
rr
Пример 2.5.7: ( )3,1,2=ar , ( )0,1,3=b
r,
( )10
3521407
10147
013312
031132,cos222222
==⋅
=++⋅++
⋅+⋅+⋅=∠ ba
rr .
2.6. Векторски производ
Нека ar и b
r се два ненулти вектори. Тогаш нивниот векторски производ ba
rr× е вектор
дефиниран на следниот начин: – Интензитетот на векторскиот производ е
( )bababarrrrrr
,sin ∠⋅⋅=× ;
– Правецот на векторот barr
× е таков што тој е нормален на двата вектори a
r и br
; – Насоката на векторот ba
rr× се опреде-
лува со помош на правилото на десна рака: a
r - палец, br
- показалец и barr
× - среден прст.
ar
br
( )barr
,∠
barr
×
Ако векторите a
r и br
се дадени во координатна форма, т.е., ( )zyx aaaa ,,=r и
( )zyx bbbb ,,=r
тогаш нивниот векторски производ се пресметува со формулата
zyx
zyx
bbbaaakji
ba
rrr
rr=× .

2-6
Пример 2.6.1: Векторскиот производ на векторите ( )3,1,2=a
r и ( )0,1,3=br
е
( )1,9,393013312 −−=−+−==× kjikji
barrr
rrr
rr .
Својства на векторскиот производ:
– abbarrrr
×−=× – ( ) ( ) ( )bababa
rrrrrr⋅×=×⋅=×⋅ λλλ
– ( ) cabacbarrrrrrr
×+×=+× и ( ) cbcacbarrrrrrr
×+×=×+ – bababa
rrrrrr⋅=×⇔⊥
– 0rrr
=×aa – ba
rr× е еднаков на плоштината на паралелограмот образуван од векторите a
r и br
(види слика 6) бидејќи ( ) Phabababa a =⋅=∠⋅⋅=×
rrrrrr,sin
br
ah
ar
слика 2.6.1
Пример 2.6.2: Да се определи плоштината на паралелограмот образуван со векторите
( )3,1,2=ar и ( )0,1,3=b
r.
Решение: Векторскиот производ на векторите ( )3,1,2=ar и ( )0,1,3=b
r е
( )1,9,393013312 −−=−+−==× kjikji
barrr
rrr
rr ,
а плоштината на паралелограмот образуван со нив е ( ) ( ) 91193 222 =−++−=×= baP
rr .
2.7. Мешан производ
Нека ar , b
r и c
r се три ненулти вектори. Тогаш нивниот мешан производ ( )cbarrr е скалар
(реален број) дефиниран на следниот начин: ( ) ( ) cbacba
rrrrrr⋅×= .
Ако векторите a
r , br
и cr се дадени во координатна форма, т.е., ( )zyx aaaa ,,=
r ,
( )zyx bbbb ,,=r
и ( )zyx cccc ,,=r тогаш нивниот мешан производ се пресметува со
формулата
( )zyx
zyx
zyx
cccbbbaaa
cba =rrr

2-7
Пример 2.7.1: Мешаниот производ на векторите ( )4,2,3 −=ar , ( )5,1,2 −=b
r и ( )2,2,4 −−=c
r изнесува
( ) 36224512423
,, −=−−−−
=cbarrr .
Својства на мешаниот производ:
– ( ) ( ) ( )acbcabcbarrrrrrrrr
=−=
– Апсолутната вредност на мешани-от производ ( )cba
rrr е еднаква на
волуменот на паралелопипедот кој е образуван од трите вектори a
r , br
и cr . (слика 2.7.1)
– ( )
ba
cba
BVH rr
rrr
×== е должината на
висината на паралелопипедот кој е образуван од трите вектори a
r , br
и cr каде за основа е земена страната образувана од векторите a
r и br
. слика 2.7.1
Пример 2.7.2: Да се определи волуменот на паралелопипедот кој е образуван од векторите ( )4,2,3 −=a
r , ( )5,1,2 −=br
и ( )2,2,4 −−=cr и неговата висина ако за
основа се зема паралелограмот образуван од векторите ar и b
r.
Решение: Мешаниот производ на векторите ( )4,2,3 −=a
r , ( )5,1,2 −=br
и ( )2,2,4 −−=c
r е
( ) 36224512423
,, −=−−−−
=cbarrr ,
а волуменот на паралелопипедот образуван со нив е 3636 =−=V .
Векторскиот производ barr
× е
( )1,7,676512423 −−=−+−=
−−=× kjikji
barrr
rrr
rr
и затоа ( ) ( ) 86176 222 =−++−=×= baB
rr .
Бараната висина е
438618
8636
===BVH .

2-8
Задачи за вежбање
2.1. Да се покаже компланарноста на векторите ( )2,0,1=ar , ( )0,1,3=b , ( )4,1,1 −−=c , а
потоа c да се изрази како линеарна комбинација од векторите ar и b
r.
2.2. Да се покаже дека векторите ( )2,0,1=ar , ( )0,1,3=b , ( )4,1,1 −−=c се линеарно
зависни, а потоа векторот br
да се изрази како линеарна комбинација од векторите a
r и cr .
2.3. Да се определи параметарот λ, така што векторите ( )λ,0,1=ar , ( )0,1,3=b ,
( )4,1,1 −−=c да бидат линеарно зависни. Потоа, векторот ar да се изрази како
линеарна комбинација од другите два вектора.
2.4. Да се покаже дека векторите ( )0,1,2=ar , ( )1,0,1=b , ( )2,3,0=c не се компланарни,
а потоа векторот ( )4,10,0=dr
да се изрази како линеарна комбинација од векторите a
r , br
и cr .
-----------------------------------------------------------------------------------------------------
2.5. Да се пресмета barr⋅ и ba
rr× ако: qpa
rrr−= 2 , qpb
rrr3+= , 3,1 == qp
rr и аголот меѓу
нив 3πα = .
2.6. Да се пресмета ar , ако qpa
rrr−= 2 , 3,1 == qp
rr и аголот меѓу нив 3πα = .
-----------------------------------------------------------------------------------------------------
2.7. Да се пресметаат плоштината и должината на едната дијагонала на паралелограмот зададен со векторите qpa
rrr−= 2 и qpb
rrr3+= , ако се знае дека
3,1 == qprr и аголот меѓу нив
3πα = .
2.8. Векторите qparrr
−= 2 и qpbrrr
3+= каде што 3,1 == qprr и аголот меѓу нив
3πα =
образуваат триаголник. Да се пресмета плоштината и една од висините на триаголникот.
2.9. Да се пресмета плоштината на триаголникот определен со векторите ( )0,1,2=ar
и ( )2,3,0=br
.
2.10. Да се пресмета аголот γ и плоштината на триаголникот ABC: ( )2,1,2A , ( )2,2,4B , ( )4,4,2C .
2.11. Да се пресмета плоштината на паралелограм определен со векторите AB и AC , каде што ( )2,1,2A , ( )2,2,4B , ( )4,4,2C .
2.12. Дадени се точките ( )2,1,2A , ( )2,2,4B , ( )xC ,4,2 . Најди го x т.ш 13=AC , а потоа
пресметај ја плоштината на паралелограмот конструиран над AB и AC .
2.13. Дадени се точките ( )0,1,2A , ( )0,2,4B , ( )1,1,3C и ( )xD ,4,2 . Да се определи x така што точките да лежат на една рамнина, а потоа да се пресмета плоштината на четириаголникот ABCD .
----------------------------------------------------------------------------------------------------

2-9
2.14. Да се пресмета висината SE на тетраедарот ABCS зададен со точките ( )1,1,1 −−A , ( )0,1,2B , ( )1,0,1C и ( )1,1,4 −S .
2.15. Да се пресмета волуменот на пирамидата определена со векторите ( )1,2,1=ar ,
( )2,1,0=br
и ( )2,0,3=cr .
2.16. Векторите ( )0,2,1=ar , ( )1,0,2=b
r и j
r образуваат паралелопипед. Да се пресмета
неговиот волумен и должината на висината спуштена кон страната образувана од векторите ar и b
r.

3-1
3. Аналитичка геометрија
Аналитичка геометрија е подрачје во математиката кое се занимава со проучување на геометриски својства на објекти со користење на аналитички изрази.
3.1. Поделба на отсечка во даден однос
Нека се дадени координатите на крајните точки на отсечката AB , т.е., нека се дадени точките ( )111 ,, zyxA и ( )222 ,, zyxB . Координатите на точката ( )zyxM ,, која ја дели отсечката AB на делови AM и MB такви што λ=MBAM : се определуваат со следните формули:
λλ
++
=1
21 xxx ,
λλ
++
=1
21 yyy и
λλ
++
=1
21 zzz .
A
BM
Пример 3.1.1: Дадени се точките ( )3,1,2A и ( )0,1,3 −B . Да се определи точка М која отсечката AB ја дели во однос 1:3.
Решение: Треба да определиме точка М таква што 3:1: =MBAM , т.е., 31
=λ . Бараната
точка е ⎟⎠⎞
⎜⎝⎛
412,
21,
412M бидејќи:
412
49
311
3312
121 ==
+
⋅+=
++
=λλxx
x , ( )
21
42
311
1311
121 ==
+
−⋅+=
++
=λλ yy
y
412
49
311
0313
121 ==
+
⋅+=
++
=λλ zz
z .
3.2. Рамнина
3.2.1. Равенка на рамнина
Равенка на рамнина во општ облик. Равенка на рамнина Π во општ облик е:
0: =+++Π DCzByAx . Векторот ( )CBAn ,,=Π
r е нормален на рам-нината и се нарекува карактеристичен вектор за рамнината.
Πnr
Π
Пример 3.2.1: Ќе покажеме дека површината определена со равенката 0442 =−+− zyx (3.1) е рамнина. Точките ( )0,0,2A , ( )0,1,0 −B , ( )4,0,0C ја задоволуваат дадената равенка и определуваат една рамнина бидејќи не лежат на иста права (зошто?). Понатаму, точката
( )yxyxM 424,, +− е произволна точка од површината определена со равенката (3.1) и лежи на иста рамнина со точките А, В и С (да се провери со пресметка на мешаниот производ на векторите AB , AC и AM ). Векторот ( )1,4,2 −=n
r е нормален на рамнината
определена со (3.1) бидејќи 0=×nABr .

3-2
Равенка на рамнина во сегментен облик. Равенка на рамнина во сегментен облик:
1: =++Πpz
ny
mx . Рамнината на координатните
оски x, y и z отсекува сегменти m, n и p, соодветно, како што е прикажано на сликата 3.2.1.
m
x
y
z
np
m
слика 3.2.1
Пример 3.2.2: Рамнината определена со равенката
1132=++
zyx
На координатните оски x, y и z отсекува сегменти 2, 3 и 1, соодветно, бидејќи точките ( )0,0,2A , ( )0,3,0B и ( )1,0,0C лежат истовремено и на оските и на рамнината.
Пример 3.2.3: Рамнината зададена со равенката во општ облик
0632 =++− zyx може да ја запишеме со равенка во сегментен облик
1623=
−++
−zyx
така што ќе ги спроведеме следните трансформации
1623
166
36
26320632 =−
++−
⇔=−
+−
−−
⇔−=+−⇔=++−zyxzyxzyxzyx .
Равенка на рамнина во нормален облик.
Равенка на рамнина во нормален облик: 0222=
++±
+++
CBA
DCzByAx , а знакот пред
квадратниот корен се зема спротивен од знакот на слободниот коефициент D. Пример 3.2.4: Рамнината зададена со равенката во општ облик
0632 =++− zyx може да ја запишеме со равенка во нормален облик
( )0
132
632122=
+−+−
++− zyx , т.е., 0146
141
143
142
=−−+− zyx .
Равенка на рамнина која минува низ дадена точка и е нормална на даден вектор. Ако е дадена точка ( )111 ,, zyxM и вектор ( )CBAn ,,=
r тогаш равенката на рамнината која минува низ точката М и е нормална на векторот n
r се добива со формулата ( ) ( ) ( ) 0111 =−+−+− zzCyyBxxA .
Пример 3.2.5: Рамнината што минува низ точката ( )3,1,2M и е нормална на векторот
( )1,3,2−=nr има равенка во општ облик
( ) ( ) ( ) 0311322 =−+−+−− zyx односно
0232 =−++− zyx .

3-3
Равенка на рамнина која минува низ три дадени точки.
Нека се дадени точките ( )1111 ,, zyxM , ( )2222 ,, zyxM и ( )3333 ,, zyxM . Равенката на рамнината која минува низ овие три точки се добива со решавање на детерминантата
131313
121212
111
zzyyxxzzyyxx
zzyyxx
−−−−−−−−−
=0.
Пример 3.2.6: Рамнината што минува низ точките ( )0,1,21M , ( )2,1,32M и ( )1,0,33M има равенка во општ облик
052 =−−+ zyx која се добива со пресметување на детерминантата
0011023021123012=
−−−−−−−−− zyx
, т.е, 0111201
012=
−
−−− zyx.
3.2.2. Взаемна положба на две рамнини. Дадени се рамнините 0: 1111 =+++Π DzCyBxA и 0: 2222 =+++Σ DzCyBxA . Нивните карактеристични вектори се ( )111 ,, CBAn =Π
r и ( )222 ,, CBAn =Σr . Тогаш можни се
следните взаемни положби на овие две рамнини:
1. Рамнините се совпаѓаат ако2
1
2
1
2
1
2
1
DD
CC
BB
AA
=== .
Пример 3.2.9: Рамнините 0432: =−+−Π zyx и 08624: =−+−Σ zyx се совпаѓаат бидејќи
84
63
21
42
−−
==−−
= .
2. Рамнините се паралелни.
2
1
2
1
2
1
2
1||||DD
CC
BB
AA
nn ≠==⇔⇔ΣΠ ΣΠrr .
Пример 3.2.7: Рамнините
0432: =−+−Π zyx и 01624: =++−Σ zyx се паралелни и не се совпаѓаат бидејќи
14
63
21
42 −
≠=−−
= . Πnr
Π
Σnr
Σ
3. Рамнините се взамено нормални.
⇔=⋅⇔⊥⇔Σ⊥Π ΣΠΣΠ 0nnnnrrrr .
0212121 =++⇔ CCBBAA Пример 3.2.8: Рамнините
0432: =−+−Π zyx и 0128: =+++Σ zyx се взаемно нормални бидејќи
( ) 0238112 =⋅+⋅−+⋅ .
Πnr
Π
Σnr
Σ

3-4
4. Аголот помеѓу две рамнини Π и Σ се
пресметува со формулата
( )
22
22
22
21
21
21
212121
cos
CBACBA
CCBBAAnnnn
++⋅++
++=
=⋅⋅
=Σ,Π∠ΣΠ
ΣΠrr
rr
.
Πnr
Π
Σnr
Σ
Пример 3.2.10: Аголот помеѓу рамнините 04474: =−++Π zyx и 0122: =+++Σ zyx е
015.642726arccos =
бидејќи
( ) .2726
122474
142724cos222222=
++⋅++
⋅+⋅+⋅=Σ,Π∠
3.2.3. Взаемна положба на три рамнини. Нека се дадени равенките на рамнините
0: 1111 =+++Π DzCyBxA , 0: 2222 =+++Σ DzCyBxA и 0: 3333 =+++Ω DzCyBxA . Нивните карактеристични вектори се
( )111 ,, CBAn =Πr , ( )222 ,, CBAn =Σ
r и ( )333 ,, CBAn =Ωr ,
a на нив им одговара системот равенки
⎪⎩
⎪⎨
⎧
−=++−=++−=++
3333
2222
1111
DzCyBxADzCyBxA
DzCyBxA. (3.2)
Можни се следните взаемни положби на овие три рамнини. 1. Трите рамнини се сечат во една
точка ако системот (3.2) има един-ствено решение, т.е., ако
0
333
222
111
≠=CBACBACBA
D
и координатите на пресечната точка се решенијата на тој систем. Π
Σ
Ω
M
Пример 3.2.11: Рамнините
008532
0123
=−+−=−−+
=−+−
zyxzyx
zyx
се сечат во една точка и тоа е точката ( )1,3,2M бидејќи

3-5
3111532
123−=
−−−
−=D , 6
110538
121−=
−−
−=xD ,
9101582
113−=
−−−=yD , 3
011832123
−=−
−=zD .
2. Трите рамнини се паралелни или се
совпаѓаат ако ΣΠ nnrr
|| и ΩΠ nnrr
|| , т.е., ако
2
1
2
1
2
1
CC
BB
AA
== и 3
1
3
1
3
1
CC
BB
AA
== .
Пример 3.2.12: Рамнините
0236908246
0123
=++−=−+−
=−+−
zyxzyx
zyx
Σ
Ω
Π се паралелни и не се совпаѓаат бидејќи
81
21
42
63
−−
≠=−−
= и 21
31
62
93 −
≠=−−
= .
3. Две рамнини се паралелни или се
совпаѓаат а трета ги сече ако еден од следните услови е исполнет а два не се исполнети
ΣΠ nnrr
|| , ΩΠ nnrr
|| , ΩΣ nnrr
|| ; т.е., ако еден од следните услови е исполнет а два не се исполнети
2
1
2
1
2
1
CC
BB
AA
== , 3
1
3
1
3
1
CC
BB
AA
== ,
3
2
3
2
3
2
CC
BB
AA
== .
Σ
Π
Ω
Пример 3.2.13: Рамнините
02569:08246:
0123:
=−+−Ω=−+−Σ=−+−Π
zyxzyx
zyx
се такви што Π и Σ се паралелни и не се совпаѓаат а Ω ги сече обете бидејќи
81
21
42
63
−−
≠=−−
= , 51
62
93
≠−−
= и 52
64
96
≠−−
= .
4. Трите рамнини се сечат во една права ако
3
21
3
21
3
21
3
21
DDD
CCC
BBB
AAA −
=−
=−
=−
Објаснувањето на ова тврдење е надвор од до-менот на овој предмет.
Π
Σ
Ω

3-6
Пример 3.2.14: Рамнините
⎪⎩
⎪⎨
⎧
=+−−=+−+=−−+
0201520142
zyxzyxzyx
се сечат во една права бидејќи ( )
211
154
112
121 −−
=−−−−
=−−
=− .
5. Трите рамнини се сечат во три
различни и паралелни прави ако 0=D и ниту еден од следните услови
не е исполнет
2
1
2
1
2
1
CC
BB
AA
== , 2
3
2
3
2
3
CC
BB
AA
== ,
1
3
1
3
1
3
CC
BB
AA
== . (3.3)
Π
Σ
Ω
Објаснување: Ако 0=D тогаш системот (3.2) или нема решение или има беско-нечно многу решенија. Ако ниту еден од условите (3.3) не е исполнет тогаш рамнините не се паралелни и не се совпаѓаат, па останува да се сечат во три различни и паралелни прави.
Пример: Рамнините
022:083:012:
=−−+Ω=−+Σ=−+Π
zyxzxyx
се сечат во три различни и паралелни прави бидејќи
0121
103012
=−
=D , 10
01
32
≠≠ , 11
02
31 −
≠≠ , 01
12
21 −
≠≠ .
3.3. Права
Равенка на права во каноничен облик е:
3
0
2
0
1
0:m
zzm
yym
xxp
−=
−=
− .
Правата p минува низ точката ( )000 ,, zyxM и е колинеарна со векторот ( )321 ,, mmmn p =
r кој се нарекува носач на правата p.
pnr
M
p
Равенка на права во параметарски облик: ⎪⎩
⎪⎨
⎧
+=+=+=
tmzztmyy
tmxxp
30
20
10
: .
Пример 3.3.1:
а) Дадена е права со равенки во каноничен облик
13
12
21:
−−
=+
=− zyxp .

3-7
Носач на правата е векторот ( )1,1,2 −=pnr и таа минува низ точката ( )3,2,1 −M .
Нејзините параметарски равенки се
⎪⎩
⎪⎨
⎧
+−=−=+=
3212
:tz
tytx
p .
б) Дадена е права со нејзините равенки во параметарски облик
⎪⎩
⎪⎨
⎧
−−=+=+=
143223
:tz
tytx
p .
Нејзините равенки во каноничен облик се
41
23
32:
−+
=−
=− zyxp .
Равенка на права во имплицитен облик е:
⎩⎨⎧
=+++=+++
00
:2222
1111
DzCyBxADzCyBxA
p .
Правата p е пресек на рамнините 0: 1111 =+++Π DzCyBxA 0: 2222 =+++Σ DzCyBxA .
Услов за правата p да постои, т.е., рамни-ните да се сечат е да не е исполнето
2
1
2
1
2
1
CC
BB
AA
== . Π
Σp
Пример 3.3.2: Една права е дадена со следните равенки во имплицитен облик:
⎩⎨⎧
=+−+−=−++
0120142
:zyxzyx
p .
Равенка на права која минува низ дадена точка и е паралелна со даден вектор.
Ако е дадена точка ( )111 ,, zyxM и вектор ( )321 ,, mmmn =
r тогаш равенката на правата p која минува низ точката М и е паралелна на векторот n
r се добива со формулата
3
1
2
1
1
1:m
zzm
yym
xxp
−=
−=
− .
nr
pM
Пример 3.3.3: Правата што минува низ точката ( )3,2,1 −M и има носач ( )1,1,2 −=n
r има равенки во каноничен облик
13
12
21:
−−
=+
=− zyxp .
Пример 3.3.4: Дадена е права со равенки во имплицитен облик
⎩⎨⎧
=+−+−=−++
0520142
:zyxzyx
p .
Нејзините равенки во каноничен облик се добиваат согласно следната постапка: – Прво се наоѓа една точка што лежи на двете рамнини така што фиксираме 0=x
во равенките на правата и го добиваме системот

3-8
⎩⎨⎧
=+−=−+
052014
zyzy
.
Со решавање на системот се добива 3−=y и 1=z , т.е., точката ( )1,3,0 −M лежи на двете рамнини.
– Потоа се наоѓа носачот на правата како векторски производ од карактеристи-чните вектори на двете рамнини
( ) ( ) ( )3,0,62,1,14,1,2 −=−−×=pnr .
– Правата р има равенки во каноничен облик
31
03
6: −
=+
=−
zyxp .
Равенка на права која минува низ две дадени точки.
Ако се дадени точките ( )1111 ,, zyxM и ( )2222 ,, zyxM тогаш равенката на правата p која
минува низ нив се добива со формулата
12
1
12
1
12
1:zz
zzyy
yyxx
xxp
−−
=−−
=−− .
p
1M 2M
Пример 3.3.5: Правата што минува низ точките ( )1,2,11 −−M и ( )3,1,22M има равенки во каноничен облик
( )( )
( )( )13
1212
121:
−−−−
=−−−−
=−− zyxp , т.е.,
41
32
11: +
=+
=− zyxp .
Взаемна положба на две прави.
Дадени се правите 3
1
2
1
1
1:m
zzm
yym
xxp
−=
−=
− и 3
2
2
2
1
2:n
zzn
yyn
xxq
−=
−=
− . Правите p и q
минуваат низ точките ( )1111 ,, zyxM и ( )2222 ,, zyxM , соодветно, а нивните носачи се векторите ( )321 ,, mmmn p =
r и ( )321 ,, nnnnq =r . Тогаш можни се следните взаемни полож-
би на овие две прави: Правите се паралелни.
3
3
2
2
1
1||||nm
nm
nm
nnqp qp ==⇔⇔rr
pnr
pqnr
q
Пример 3.3.6: Правите
41
32
11: +
=+
=−− zyxp и
127
94
31: +
=+
=−+ zyxq
се паралелни бидејќи 124
93
31
==−− .
Правите се совпаѓаат.
qp nnqprr
||⇔≡ и qM ∈1
3
3
2
2
1
1
nm
nm
nm
==⇔ и 3
21
2
21
1
21
nzz
nyy
nxx −
=−
=−
pnr
pqnr
q

3-9
Пример 3.3.7: Правите
41
32
11: +
=+
=−− zyxp и
1211
97
32: −
=−
=−+ zyxq
се совпаѓаат бидејќи 124
93
31
==−− и 1
12111
972
321
−=−−
=−−
=−+ .
Правите се сечат.
Правите p и q се сечат ако тие не се паралелни и ако векторите 21MM , pn
r и qnr се компланарни, односно ако
за мешаниот производ ( )qp nnMMrr
21 важи
( ) 0
321
321
121212
21 =−−−
=nnnmmm
zzyyxxnnMM qprr .
p
1Mq
2Mpnr
qnr
Пример 3.3.8: Правите
41
32
11: +
=+
=−− zyxp и
23
11
3: −
=−
=−
zyxq
се сечат бидејќи не се паралелни затоа што 24
13
31
≠≠−− и важи
( ) ( )0
213431
132110=
−−
−−−−−.
Агол помеѓу две прави.
Агол помеѓу правите p и q е аголот помеѓу две прави кои се сечат а се паралелни со дадените. Тој се пресметува со формулата
( )
23
22
21
23
22
21
332211
cos
nnnmmm
nmnmnm
nn
nnqp
qp
qp
++⋅++
++=
=⋅
⋅=,∠ rr
rr
. q
pnr
qnr
( )qp,∠
ppnr
Пример 3.3.9: Аголот помеѓу правите
41
72
41: +
=+
=− zyxp и
13
21
22: −
=−
=− zyxq
е ( ) 015.642726arccos =
бидејќи
( ) .2726
122474
142724,cos222222=
++⋅++
⋅+⋅+⋅=∠ qp
Правите се взаемно нормални.
00 332211 =++⇔=⋅⇔⊥⇔⊥ nmnmnmnnnnqp qpqprrrr
Пример 3.3.9: Правите
11
12
21: +
=−+
=− zyxp и
13
31
12: −
=−
=− zyxq
се взаемно нормални бидејќи ( ) 0113112 =⋅+⋅−+⋅ .

3-10
3.4. Взаемна положба на права и рамнина
Дадени се права 3
1
2
1
1
1:m
zzm
yym
xxp
−=
−=
− и рамнина 0: =+++Π DCzByAx . Правата има
носач ( )321 ,, mmmn p =r , а рамнината има карактеристичен вектор ( )CBAn ,,=Π
r . Тогаш можни се следните взаемни положби помеѓу нив: Правата и рамнината се паралелни.
0|| =⋅⇔⊥⇔Π ΠΠ nnnnp pprrrr
0321 =++⇔ CmBmAm .
Πnr
Π
pnr p
Пример 3.4.1: Правата и рамнината дадени со
31
32
11:
−+
=+
=−− zyxp и 0123: =−++−Π zyx
се паралелни бидејќи ( ) ( ) ( ) 0231331 =⋅−+⋅+−⋅− .
Правата и рамнината се сечат.
Правата p и рамнината Π се сечат ако не се паралелни, т.е., ако 0321 ≠++ CmBmAm .
Пример 3.4.2: Правата и рамнината дадени со
41
72
41: +
=+
=− zyxp и 0122: =−++Π zyx
се сечат бидејќи 026142724 ≠=⋅+⋅+⋅ .
Агол помеѓу права и рамнина.
Агол помеѓу правата p и рамнината Π е аголот помеѓу правата p и нејзината ортогонална проекција на рамнината Π. Бидејќи
( ) ( )Π∠−=Π∠ nnp prr
,90, 0 , тој се пресметува со формулата
( ) ( ) ( )
22223
22
21
321
,cos,2
sin,sin
CBAmmm
CmBmAmnn
nn
nnnnp
p
p
pp
++⋅++
++=
⋅
⋅=
=∠=⎥⎦⎤
⎢⎣⎡ ∠−=Π∠
Π
Π
ΠΠ
rr
rr
rrrrπ
Πnr
Π
pnr
p
( )Π∠ ,p
Пример 3.4.3: Аголот помеѓу правата и рамнината дадени во примерот 3.4.2 е 036.74
2726arcsin = бидејќи ( ) .
2726
122474
142724,sin222222=
++⋅++
⋅+⋅+⋅=Π∠ p
Правата и рамнината се взаемно нормални.
Cm
Bm
Am
nnp p321|| ==⇔⇔Π⊥ Π
rr
Пример 3.4.4: Правата и рамнината дадени со
41
32
11: +
=+
=−− zyxp и 011293: =−++−Π zyx
се взаемно нормални бидејќи 124
93
31
==−− .
Πnr
Π
pnr
p

3-11
3.5. Растојанија
Нека се дадени – точки ( )1111 ,, zyxM и ( )2222 ,, zyxM ;
– прави 3
1
2
1
1
1:m
zzm
yym
xxp
−=
−=
− и 3
2
2
2
1
2:n
zzn
yyn
xxq
−=
−=
− ;
– рамнини 0: 1111 =+++Π DzCyBxA и 0: 2222 =+++Σ DzCyBxA . Тогаш може да се разгледуваат следните растојанија помеѓу нив: Растојание помеѓу две точки.
Растојанието помеѓу точките 1M и 2M е всушност модулот на векторот
( )12121221 ,, zzyyxxMM −−−= , т.е.,
( ) ( ) ( ) ( )2122
122
1221 , zzyyxxMMd −+−+−= . 2M1M
Пример 3.5.1: Растојаниете помеѓу точките ( )3,1,21M и ( )1,0,32M е
( ) ( ) ( ) ( ) 6311023, 22221 =−+−+−=MMd .
Растојание од точка до рамнина.
Растојанието од точката 1M до рамнината Π е
( )21
21
21
11111111 ,
CBA
DzCyBxAMd
++
+++=Π .
Објаснувањето на оваа формула е надвор од доменот на овој предмет.
Π
1M
Пример 3.5.2: Растојанието од точката ( )5,1,21M до рамнината 0432: =−+−Π zyx е
( )( ) 7
14142
132
451322,
2221 ==
+−+
−+⋅−⋅=ΠMd .
Растојание меѓу две паралелни рамнини.
Ако рамнините Π и Σ се паралелни, т.е., ако
2
1
2
1
2
1
CC
BB
AA
== тогаш растојанието меѓу нив е
( ) ( )Σ=ΣΠ ,, 3Mdd , каде 3M е призволна точка од рамнината Π.
Пример 3.5.3: Растојанието меѓу паралелните рамнини
012264: =−+−Π zyx и 0432: =−+−Σ zyx изнесува
Π
Σ
3M
( ) ( )( ) 7
14142
132
451322,,
2223 ==
+−+
−+⋅−⋅=Σ=ΣΠ Mdd , каде точката ( )5,1,23M е призволна
точка од рамнината Π.

3-12
Растојание од точка до права.
Растојанието од точката 1M до правата p со носач ( )321 ,, mmmn p =
r е всушност висината на паралелограмот
образуван од векторите pnr и 41MM , каде како основа се
зема векторот pnr а ( )1114 ,, zyxM е произволна точка од
правата p, т.е.,
( )p
p
n
MMnpMd r
r41
1 ,×
= . pnr
p
1M
4M
Пример 3.5.4: Растојаниете од точката ( )3,1,21M до правата 4
13
211: +
=+
=−− zyxp е
( )13
26526
10,41
1 ==×
=p
p
n
MMnpMd r
r
,
каде ( )4,3,1−=pnr , ( )1,2,14 −−M , 26=pn
r , ( )4,3,141 −−−=MM , ( )6,8,041 −=× MMn pr и
1041 =× MMn pr .
Растојание меѓу две паралелни прави. Ако правите p и q со носачи ( )321 ,, mmmn p =
r и qnr се
паралелни тогаш растојанието меѓу нив е еднакво на растојанието меѓу точка ( )2225 ,, zyxM од правата q и правата р, т.е.,
( ) ( )p
p
n
MMnpMdqpd r
r45
5 ,,×
== . pnr
p
5M
4M
q
Пример 3.5.5: Растојаниете меѓу паралелните прави
41
32
11: +
=+
=−− zyxp и
83
61
22: −
=−
=−− zyxq
е
( ) ( )13
26526
10,,41
5 ==×
==p
p
n
MMnpMqpd r
r
каде ( )3,1,25M е произволна точка од правата q. За останатите пресметки погледни го претходниот пример. Растојание меѓу две разминувачки прави.
Ако правите p и q со носачи ( )321 ,, mmmn p =r и
( )321 ,, nnnnq =r се разминуваат тогаш растојанието меѓу нив е висината на паралелопипедот образуван од векторите pn
r , qnr и 45 MM , каде како основа се зема
паралелограмот образуван од векторите pnr и qn
r , а ( )1114 ,, zyxM и ( )2225 ,, zyxM се произволни точки од
правите p и q, соодветно, т.е.,
( )( )
qp
qp
nn
MMnnqpd rr
rr
×=
45, .
p
q
pnr
qnr
qnr
4M
5M

3-13
Пример 3.5.6: Растојаниете меѓу разминувачките прави
41
32
11: +
=+
=−− zyxp и
23
61
22:
−−
=−
=−− zyxq
е
( )( )
897.11010
60,
45≈
+=
×=
qp
qp
nn
MMnnqpd rr
rr
,
бидејќи ( )4,3,1−=pnr , ( )2,6,2 −−=qn
r , ( )0,10,30 −−=× qp nnrr , 1010=× qp nn
rr ,
( )1,2,14 −−M , ( )3,1,25M , ( )4,3,145 −−−=MM , ( ) 6045 =MMnn qprr .
Задачи за вежбање
3.1. Да се определи равеката на рамнината:
a. низ точката ( )0,1,2M која на координатните оски отсекува сегменти кои се во однос 2:3:1 ;
b. низ точките ( )0,1,2A , ( )0,2,1B и ( )2,3,1C .
3.2. Најди ја равенката на рамнината што минува низ точката ( )0,1,2M и е
нормална на правата дадена со равенките 1
11
32
2 −=
−=
− zyx .
3.3. Да се најде равенката на рамнината што минува низ точките ( )0,1,2A и
( )2,3,1B , а е паралелна со правата 1
12
21
2 −=
+=
− zyx .
– Да се најде равенката на рамнината Π што минува низ правата
⎩⎨⎧
=+++=+++0434
06523:
zyxzyx
p
3.4. и минува низ точката ( )0,1,2 −A ;
3.5. и е паралелна со правата 31
23:
−−
==zyxq ;
3.6. и е нормална на рамнината 08323:1 =−−+Σ zyx ;
3.7. и е паралелна со рамнината 08:1 =−+−Σ zyx .
3.8. Да се испита дали се сечат правите 3
311
22
:−
=−−
=−+ zyx
p и 11
22
:zyx
q =−−
= .
Во потврден случај да се најде нивната пресечна точка и рамнината во која лежат.
3.9. Дадени се правите: 3
78
41
:−
=−
=zyx
p и 22
11
:−−
==−+ zyx
qλ
. Да се одреди λ
така да дадените прави се сечат и за така најденото λ да се најде пресечната точка на правите.

3-14
3.10. Да се најдат равенките на правата што минува низ прободот на рамнината
03832: =+−−Π zyx со правата 3
311
22
:−
=−−
=−+ zyx
p и е нормална на
дадената рамнина.
– Дадена е правата 4
24
13:
−=
+=
− zya
xq . Да се определи a така што
3.11. правата p да минува низ точката ( )6,9,7 −−A ;
3.12. правата p да биде паралелна со рамнината 0542 =−+− zyx .
3.13. Да се определи пресечната точка и аголот помеѓу правата 1
32
12
2 −=
−=
− zyx
и рамнината 0122 =++− zyx .
3.14. Да се определи растојанието од точката ( )4,5,3A до правата
221
12
:zyx
p =−
=−− .
3.15. Да се определи растојанието од правата 22
112
:zyx
p =−
=−− до правата
41
41
21
:−
=−
=−− zyx
q .





























