Embed Size (px)
Citation preview

Redundancy Resolution for Singularity Avoidance of Wheeled Mobile Manipulators
Adel Abbaspour
Research Assistant, Faculty of Mechanical Engineering, K. N. Toosi University of Technology
Tehran, Iran
Hadi Zare Jafari
Research Assistant, Faculty of Mechanical Engineering, K. N. Toosi University of Technology
Tehran, Iran
Mohammad Ali Askari Hemmat Research Assistant, Faculty of Mechanical
Engineering, Concordia Univeristy Montreal, Canada
Khalil Alipour Assistant Professor, University of Tehran
Faculty of New Sciences and Technologies
Tehran, Iran
ABSTRACT Mobile robots consist of a mobile platform with
manipulator can provide interesting functionalities in a
number of applications, since, combination of platform and
manipulator causes robot operates in extended work space.
The analysis of these systems includes kinematics redundancy
that makes more complicated problem. However, it gives more
feasibility to robotic systems because of the existence of
multiple solutions in a specified workspace. This paper
presents a novel combination of evolutionary algorithms and
artificial potential field theory for motion planning of mobile
manipulator which guaranteed collision and singularity
avoidance. In the proposed algorithm, the developed concepts
of potential field method are applied to obstacle avoidance
and interaction of mobile base with manipulator is used as a
new idea for singularity avoidance ability of intermediate
links for mobile operations. For this purpose, kinematic and
dynamic modeling is derived to define redundant solutions.
Afterward, methods from potential field theory combine with
evolutionary algorithms to provide an optimum solution
among possibly of redundancy resolution scheme. A controller
based on dynamic feedback linearization is augmented to
track the selective motion trajectory. Simulation results verify
obstacle avoidance, singularity avoidance for the
manipulators and asymptotic convergence of the robots
errors.
NOMENCLATURE 𝑥𝑐 The coordinate (𝑥) of point 𝑃𝑐
𝑦𝑐 The coordinate (𝑦) of point 𝑃𝑐
𝜃1 Joint angle of first link
𝜃2 Joint angle of second link
𝜃3 Joint angle of third link
𝜃𝑟 Rotation angle of right wheel of platform
𝜃𝑙 Rotation angle of left wheel of platform
𝑃 Center point of differential axle
𝑃𝑐 Center of gravity of mobile platform
d
Distance of 𝑃 to 𝑃𝑐
R
Wheel radius of platform
b
Half of distance between wheels
𝑙1 Length of the first link
𝑙2 Length of the second link
𝑙3 Length of the third link
𝜏𝑟 Right wheel torque of platform
𝜏𝑙 Left wheel torque of platform
𝜏1 Torque of first joint
𝜏2 Torque of second joint
𝜏3 Torque of third joint
𝜑 Orientation of the platform
𝜂 Coefficient of the repulsive function
𝜉 Coefficient of the attractive function
Proceedings of the ASME 2014 International Mechanical Engineering Congress and Exposition IMECE2014
November 14-20, 2014, Montreal, Quebec, Canada
IMECE2014-38639
1 Copyright © 2014 by ASME

1. INTRODUCTION
Robots, which include the combinations of the mobile
robots and manipulators, are widely used for different
applications such as material handling, spray painting,
mechanical and electronic devices assembly, material removal
and payload transport [1,2, 12]. To realize all the above
functionalities, the fundamental problem is getting a robot to
move from an initial configuration to a desired final
configuration without collides with any obstacles. However,
for a given motion, there might be singularity postures which
can affect the performance of a robot, since; the inverse
kinematics of a mobile manipulator does not have a
meaningful solution. A redundant mobile manipulator can
avoid singular postures by exploiting the set of all possible
motions and its extra DOFs than that required for a given main
task [3]. Mobile manipulators thus have adaptability and
flexibility for executing complex or even dexterous tasks.
Motion planning for nonholonomic wheeled mobile
manipulators has always been a challenging problem which
attracted significant attention in recent years [4]. No general
solutions have been proposed for online navigation of mobile
manipulators, partly due to the complexity of the problem and
the fact that robots should have ability to avoid singularity and
obstacle simultaneously [5, 6]. Motion planning strategies for
mobile robots are based on differential geometry [6], flatness
properties [5] of nonhonolomic systems have been exploited
[7] and other forms of input parameterization can lead to multi
rate [8] and time varying control laws [6].
However, researchers have developed various algorithms
to avoid singularities in the workspace of fixed base
manipulators [14] or platform type parallel manipulators [3, 8]
but these methods cannot be applied in mobile base
manipulators. On the other hand, other proposals for avoiding
obstacles and singular points have included the use of
dumping element perturbations [5], and regulation of the
dumping element [10]. More recent research on redundant
manipulators has involved minimum time path-tracking
control [9], online kinematic control algorithms [11], and a
real-time approach to singularity avoidance in resolved motion
rate control [6] to solve problems of finding an arm form that
does not collide with an obstacle and how to use redundant
flexibility.
Obstacle avoidance refers to the methodologies of
shaping the robot’s path to overcome unexpected obstacles
and some of the techniques developed for path planning are
classified as geometric path planners [6] with several
variations [10] and solution to the path planning problem is
generally sought by graph searching techniques. An
alternative methodology is artificial potential field approach
which has been the most popular technique used to avoid
obstacles [13]. This technique is used to guide the robot to a
given goal at the same time that the robot is avoiding
obstacles.
Moreover, robot control can be defined as the task of
getting the robot to follow a planned desired motion. Robot
control, involves taking the planned motion as the desired
motion and the planned torque inputs to produce the
appropriate input torques to asymptotically follow the desired
motion. In [13] was found a method to compute input
acceleration based on a nonlinear feedback control law
derived from a previous work [15], where the accelerations of
the robot are computed based on a reference mobile robot of
the same class. These accelerations are applied to the robot
dynamic extension model to compute torque commands. This
way is possible to control the kinematic model of the robot
and extend the effects to the dynamic model by computing
motor torque commands for the robot. The method in [13]
shows asymptotic stability guaranteed by Lyapunov theory.
Due to the lack of detailed information of the singular
posture in a Wheeled Mobile Manipulator (WMM), the robot
may specify a trajectory that partly lies close to the singular
points. In this paper, the objective of the singularity avoidance
algorithm would be to find an alternate path, close to the
specified one. In view of the above, by considering the base
mobility, number of arms formations to achieve the desired
position approach to infinity. For this aim, multi objective
genetic algorithm is employed for finding position of robot
mobile base with respect to avoiding the singularity in joints
and collision avoidance.
The rest of this paper is organized as follows: The
kinematics and dynamics model of a mobile manipulator are
derived as the case of study system in Section 2. In Section 3,
the problem of motion planning which contains obstacle and
singularity avoidance and achieving to target is proposed and
the proposed algorithm for desired path planning for the
mobile manipulator is obtained. Then, a control law based on
feed-back linearization has been designed for tracking the
desired path in Section 4. In Section 5, the relative merits and
drawbacks of the proposed method are detailed in simulation
results. Finally, Section 6 concludes the paper with a
discussion of the results and future works.
2. SYSTEM MODELING
Mobile manipulators are built based on diverse mobile
platform designs which are different by the driving
mechanisms. The most commonly available mobile platforms
apply either a differential drive which employs two
independently actuated driven wheels with a common axis,
and casters or spherical wheels that add stability to the mobile
platform. In this section, a robotic system made of a
nonholonomic mobile platform with two independently
actuated driven wheels carrying a manipulator is considered
and differential kinematics and dynamics equations for these
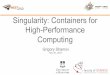
types of mobile manipulator systems is derived (see Fig. 1).
The manipulator is mounted on the center of mass of the
platform and all of the manipulator joints are revolute and
separately actuated. First link can rotate around Z axis, and the
other links can rotate about their joints that are perpendicular
to the plane of motion in the figure shown. This design allows
the end-effecter to work in a 3D task space.
Kinematics Modeling
The configuration of a nonholonomic mobile manipulator
can be 𝐪 = [𝐪𝑝 𝐪𝑚 ]T , where 𝐪𝑝 ∈ 𝑛𝑝 and 𝐪𝑚 ∈ 𝑛𝑚 are
the generalized coordinates of a mobile based and manipulator
respectively. These variables can describe the task space of a
nonholonomic mobile manipulator which are related to 𝐪 with
the kinematics map:
2 Copyright © 2014 by ASME

𝐗 = 𝓕 (𝐪p , 𝐪m) (1)
Figure 1: The mobile manipulator and the platform
where 𝐗 ∈ s describe the task space. By considering the
pure rolling of mobile base robot wheels on the ground, the
nonholonomic mobile base platform kinematic model is then
given by:
�̇�𝑝 = 𝐒(𝐪𝑝)𝐯𝑝 (2)
where 𝐯p ∈ p
are the velocities input of a
nonholonomic mobile base with p < np and the columns of
np × p matrix 𝐒(𝐪p) span the admissible velocity space at
each platform configuration. From a kinematic point of view,
the manipulator is instead a completely unconstrained system,
i.e.:
�̇�𝑚 = 𝐯𝑚 (3)
where 𝐯𝑚 ∈ 𝑚 are the velocity inputs for the
manipulator, therefore, the velocity input vector of the
nonholonomic mobile manipulator is then, 𝐯 = [𝐯pT 𝐯m
T ]T∈
p+m. When the total number of velocity inputs
(equivalently, of DOF’s) exceeds the dimension of the task,
i.e., p + nm > 𝑠 , a kinematic (motion) redundancy occurs.
This is the relevant basic definition which is used in the rest of
this paper for the aforementioned algorithm. So differentiating
the Eq. (1), we have:
�̇� =𝜕𝓕
𝜕𝐪𝑝 �̇�𝑝 +
𝜕𝓕
𝜕𝐪𝑚 �̇�𝑚 = 𝐉𝑝(𝐪)𝐒(𝐪𝑝)𝐯𝑝 + 𝐉𝑚(𝐪)𝐯𝑚
= [𝐉𝑝(𝐪)𝐒(𝐪𝑝) 𝐉𝑚(𝐪)] [𝐯𝑝𝐯𝑚]
= 𝐉(𝐪)𝐯
(4)
The s × (p + nm ) matrix 𝐉 will be simply called the
Jacobian of the nonholonomic mobile manipulator. A
configuration 𝐪 is singular if rank( 𝐉(𝐪)) < 𝑠. The addition
of a mobile base platform to a given manipulator can often
delete many of the singularities that would affect the
manipulator taken alone and this fact is illustrated in Motion
Planning Section.
For the system which is depicted in Fig. (1), position of
the robot in an inertial Cartesian frame {X, Y, Z} is completely
specified by the vector 𝐪 = [𝑥𝑐 𝑦𝑐 𝜑 𝜃1 𝜃2 𝜃3 ]T ∈
6; 𝐪p = [𝑥𝑐 𝑦𝑐 𝜑]T ∈ 3 & 𝐪m = [𝜃1 𝜃2 𝜃3 ]T ∈
3
, where (𝑥𝑐,𝑦𝑐) and 𝜑 are the coordinates of the point Pc ,
and the orientation of the mobile platform with respect to the
inertial frame respectively and 𝜃1 , 𝜃2 ,𝜃3 denotes the joint
angles of manipulator links. The platform is driven by two
driving fixed wheels; consequently mobile manipulator is
subjected to a nonholonomic constraint due to non-slipping
condition imposed on wheels from the surface of motion [16].
This constraint yields to the following relation:
𝑥̇𝑐 𝑠𝑖𝑛(𝜑) − �̇�𝑐 𝑐𝑜𝑠(𝜑) + 𝑑�̇� = 0 (5)
Therefore, it can be written in the following matrix form
of 𝐀(𝐪𝑝)�̇�𝑝 = 𝟎. Let 𝐒(𝐪𝑝) be a full rank (3 × 2) matrix
formed by a set of smooth and linearly independent vector
fields spanning the null space of matrix 𝐀(𝐪𝑝), i.e.
𝐒T(𝐪𝑝)𝐀T(𝐪𝑝) = 𝟎. It is easy to choose matrix 𝐒(𝐪𝑝) as:
𝐒(𝐪𝑝)
=
[ 𝑅
2𝑏(𝑏𝑐𝑜𝑠(𝜑) − 𝑑𝑠𝑖𝑛(𝜑))
𝑅
2𝑏(𝑏𝑐𝑜𝑠(𝜑) +𝑑𝑠𝑖𝑛(𝜑))
𝑅
2𝑏(𝑏𝑠𝑖𝑛(𝜑) + 𝑑𝑐𝑜𝑠(𝜑))
𝑅
2𝑏(𝑏𝑠𝑖𝑛(𝜑) − 𝑑𝑐𝑜𝑠(𝜑))
𝑅
2𝑏−𝑅
2𝑏 ]
(6)
In the above equation, R is the radius of the driving wheel
and 2b is the distance of two differential wheels. The vectors
of S(qp) are closed related to the nature of the constraints as is
pointed out in [16].
Since, 𝑣 = [𝑣𝑝𝑇 𝑣𝑚
𝑇 ]𝑇= [�̇�𝑟 �̇�𝐿 �̇�1 �̇�2 �̇�3]
𝑇 ∈ 5 , the
degree of kinematic redundancy is 2 in Cartesian space.
Moreover, θ̇r, θ̇L are the velocities of the right and left wheels
respectively. Considering that l1, l2, l3 as the length of
manipulator links, the coordinates of the end-effecter can be
written as:
3 Copyright © 2014 by ASME

{
𝑥𝑒 = 𝑥𝑐 + 𝑙3 𝑐𝑜𝑠(𝜃2 + 𝜃3 ) 𝑐𝑜𝑠(𝜑 + 𝜃1 ) + 𝑙2 𝑐𝑜𝑠(𝜑 + 𝜃1 ) 𝑐𝑜𝑠(𝜃2 )
𝑦𝑒 = 𝑦𝑐 + 𝑙3 𝑐𝑜𝑠(𝜃2 +𝜃3) 𝑠𝑖𝑛(𝜑 + 𝜃1 ) + 𝑙2 𝑐𝑜𝑠(𝜃2 ) 𝑠𝑖𝑛(𝜑 + 𝜃1)
𝑧𝑒 = 𝑙1+ 𝑙2 𝑠𝑖𝑛(𝜃2 ) + 𝑙3 𝑠𝑖𝑛(𝜃2 + 𝜃3 )
(7)
By derivation of Eq. (7), the end-effecter velocities are
derived as the following equation:
{
𝑥̇𝑒 = 𝑥̇𝑐 − 𝐴1(�̇� + �̇�1) − 𝐴2�̇�2 − [𝑙3 𝑠𝑖𝑛 (𝜃2 + 𝜃3) 𝑐𝑜𝑠(𝜑 + 𝜃1)]�̇�3
�̇�𝑒 = �̇�𝑐 + 𝐵1(�̇� + �̇�1) − 𝐵2 �̇�2 − [𝑙3 𝑠𝑖𝑛 (𝜃2 + 𝜃3) 𝑠𝑖𝑛(𝜑 + 𝜃1)]�̇�3
𝑧 ̇𝑒 = [𝑙2 𝑐𝑜𝑠(𝜃2 ) + 𝑙3 𝑐𝑜𝑠(𝜃2 + 𝜃3)]�̇�2 + 𝑙3 𝑐𝑜𝑠(𝜃2 + 𝜃3) �̇�3
(8)
where,
𝐴1 = [𝑙2 𝑐𝑜𝑠(𝜃2 )𝑠𝑖𝑛(𝜑 +𝜃1 )
+ 𝑙3𝑐𝑜𝑠(𝜃2 + 𝜃3 ) 𝑠𝑖𝑛(𝜑 + 𝜃1 )] 𝐴2 = [𝑙2𝑠𝑖𝑛(𝜃2 )𝑐𝑜𝑠(𝜑 + 𝜃1)
+ 𝑙3𝑠𝑖𝑛(𝜃2 + 𝜃3 ) 𝑐𝑜𝑠(𝜑 + 𝜃1 )] 𝐵1 = [𝑙2 𝑐𝑜𝑠(𝜃2 )𝑐𝑜𝑠(𝜑 + 𝜃1 )
+ 𝑙3 𝑐𝑜𝑠(𝜃2 + 𝜃3 )𝑐𝑜𝑠(𝜑 + 𝜃1 )] 𝐵2 = [𝑙2𝑠𝑖𝑛(𝜃2 ) 𝑠𝑖𝑛(𝜑 + 𝜃1)
+ 𝑙3 𝑠𝑖𝑛(𝜃2 + 𝜃3 )𝑠𝑖𝑛(𝜑 + 𝜃1 )]
By choosing �̇� = [𝑥̇𝑒 �̇�𝑒 �̇�𝑒 𝑥̇𝑐 �̇�𝑐 ]T, the above equations
can be expressed as following matrix form:
�̇� = 𝐉(𝐪)𝐯 (9)
For more details about the matrix 𝐉(𝐪), refer to appendix I.
Dynamics Modeling
To attain the dynamics modeling of the wheeled mobile
manipulator system, two methods can be considered. The first
method is Newton-Euler approach, which this method deals
with the coupling correlation of forces acted on the joints and
the displacements of links, but it is not very easy to deal with
when there are many joints. Lagrange method is the second
approach, which is the equilibrium equation of energy. The
second method is used to obtain the equations of motion. By
using the total kinetic and potential energies in Lagrange
equations and simplifying, the equations of motion will be
obtained in the following matrix form:
𝐌(𝐪)�̈� + 𝐂(𝐪, �̇�) + 𝐆(𝐪) = 𝐁(𝐪)𝛕 + 𝐀T(𝐪)𝛌 (10)
where 𝐌(𝐪) is the symmetric, positive definite inertia
matrix, 𝐂(𝐪, �̇�) is the centripetal and coriolis vector, 𝐆(𝐪) is
the gravitational vector, 𝛌 is Lagrange multiplied coefficient,
𝐁(𝐪) is the input transformation matrix and 𝛕 =[𝜏𝑟 𝜏𝑙 𝜏1 𝜏2 𝜏3]
T is torques vector of wheels and manipulator
actuators. More details about the kinetic and potential energy
are presented in appendix II.
Substituting Eq. (6) into 𝓗(𝐪) = [𝐒 (𝐪𝑝) 𝟎𝟑×𝟑𝟎𝟑×𝟐 𝐈𝟑×𝟑
]6×5
, and
then multiplying by 𝓗T(𝐪), the constraint forces 𝐀T(𝐪)𝛌 can
be eliminated. Therefore complete equations of motion of the
nonholonomic mobile platform are given by:
𝐌(𝐪) �̇� + 𝐂(𝐪, �̇�) + 𝐆(𝐪) = 𝐁(𝐪)𝛕
(11)
where,
𝐌(𝐪) = 𝓗T𝐌𝓗
C(q, q̇) = ℋTMℋ̇v + ℋTC
G(q) = ℋTG
B(q) = ℋTB
3. MOTION PLANNING
The results of this paper are motivated by the problem of
singularity postures of robotic manipulator in an environment
with obstacles under additional task constraints. Though, the
main objective of this section is to introduce a new
architecture in order to make the mobile base navigate amidst
of the obstacles while the manipulator avoids singularity
points and end-effector reach to a specified target
simultaneously. The general architecture is shown in Fig. (2) which contains
several levels. At the first level, the system path is planned, for
doing this, the location of the target and obstacles are given to the
artificial potential field algorithm. As a result, the desired
trajectory of the robot will be determined which is an input for the
control system. At the next level, the generated commands as a
control law assign to the end-effector to track the desired
trajectory in the task space. For conformity of mobile base and
end-effector, motion feedback can produce with �̃� by the control
system where the result is the nonlinear gain called α(�̃�). Motion
feedback is the input to the path generator which can adjust the
velocity of the end-effector and mobile base in tracking the
desired trajectory.
Discussions of singularity avoidance ability include three
topics, i.e., singular configuration of the manipulator which
should be avoided, optimization of performance criteria, e.g.
energy consumption and minimum traveling angle of the
joints. In the case of a redundant mobile manipulator, the
number of inverse kinematic solutions may become infinite
and closed form solutions are impossible to find in general.
One of the methods available for solving these problems are
intelligent optimization approaches such as Genetic
Algorithm.
Figure 2: Basic architecture of the proposed approach
In the mentioned architecture, a multi objective Genetic
Algorithm is applied to find the best displacement for the
MULTI OBJECTIVE
GENETIC ALGORITHM
SINGULARITY AVOIDANCE
MINIMUM ENERGY CONSUMPTION
MINIMUM ANGLE TRAVELING
ARTIFICIAL
POTENTIAL FIELD ALGORITHM
ENVIRONMENT
Location of
Target
Location of
Obstacles
PATH
GENERATO
R
CONTROLLER
WHEELED
MOBILE
MANIPULATO
R
𝛼(�̃�)
𝐪 𝐗𝑑𝑒𝑠
𝐗
4 Copyright © 2014 by ASME

mobile platform which can delete many of the singularities
that would affect the manipulator taken alone. The
contribution in multi objective Genetic Algorithm is motivated
by the following challengeable problems:
(I) The characteristics of inverse kinematic solution
gained by the Genetic Algorithm inversion scheme depends on
the fitness value of final solution gotten from genetic
algorithm. Therefore, stopping criteria of genetic algorithm
must be set in a way that genetic algorithm generation process
to be continued until end-effector position error from desired
point satisfied pre-determined accurate value.
(II) In order to satisfy the joint angle constraints, it is
necessary to provide the appropriate constraints to limit
genetic algorithm solutions to valid interval for joint angles
and having minimum angle travel from current angle vector to
singularity avoided angle vector.
(III) Since a redundant manipulator can reach a given
target through multiple joint angle vectors, it is desirable to
find the best solution based on minimum energy consumption
for moving to proposed position. Singularity avoided posture
with minimum energy consumption is found with genetic
algorithm. Therefore, as robot close to singularity postures,
longer displacement is required. Meanwhile, in singularity
avoided situations, the proposed displacement is zero because
of minimum energy consumption objective.
(IV) The proposed displacement must consider the
environment properties such as obstacle and target position, so
obstacle avoidance algorithm should also take to account
avoiding from singularity postures. In this work, to avoid the
obstacle and singularity avoidance algorithm conflict , defined
points for displacement by GA create an attraction forces in
artificial potential algorithm for mobile platform which can
provide alternate and simpler solutions to overcome
singularity problems.
The objectives of genetic algorithm are minimizing
energy consumption and minimum traveling angle with
constraint of singularity avoidance. The consequences of local
learning will also be analyzed in detail in this section aims to
learn a local solution around the current robot configuration.
In the simulation section, it will be shown that this.
Singularity Avoidance Algorithm
Existing potential field methods are based on the
assumption that the system can be represented by a point in
the workspace. In its simplest form, such potential field
method can be implemented quickly and provide acceptable
results without requiring many refinements. In fact, this
method is suitable for real-time implementation requiring only
local gradient information and without requiring global
information. While the target is ideally at the minimum, all
obstacle, or walls, are assumed to create high potential hills.
The robot is under the influence of forces exerted from
potential fields and will move in the configuration space based
on the direction of total forces exert on it. Target location
exerts an attractive force and obstacles exert repulsive forces
on the robot. Therefore sum of both potentials, determines the
direction and speed of travel for the mobile manipulator.
Typically, the attractive potential field and the repulsive
potential fields are formulated separately, and the total
potential field of the workspace is obtained by linear
superposition of the two fields. The overall potential is the
sum of these two types of potentials and can be written as:
Utotal (𝐪) = Uatt (𝐪) + Urep (𝐪) (12)
where Utotal(𝐪) denotes the total artificial potential
field; Uatt (𝐪) denotes the attractive potential field and
Urep (𝐪) is the repulsive potential field. While many different
attractive potential functions have been proposed in the
literature, the applicable attractive potential field takes the
form of:
Uatt (𝐪)
=
{
1
2𝜉1‖𝒒𝑡𝑎𝑟 − 𝒒𝑟𝑜𝑏‖
𝑚1 , 𝑖𝑓‖𝒒𝐺𝐴 − 𝒒𝑟𝑜𝑏‖ > 𝐷
1
2𝜉1‖𝒒𝑡𝑎𝑟 − 𝒒𝑟𝑜𝑏‖
𝑚1 +1
2𝜉2‖𝒒𝐺𝐴 − 𝒒𝑟𝑜𝑏‖
𝑚2 ,
𝑖𝑓‖𝒒𝐺𝐴 − 𝒒𝑟𝑜𝑏‖ < 𝐷
(13)
where 𝜉𝑖 is a positive scaling factor, 𝐪tar and 𝐪rob denote
the position for the target and the robot, respectively.
Moreover, 𝐪GA is the result of multi objective Genetic
Algorithm which means, GA produce a local and temporary
target for mobile platform in order to avoid singular postures
while define optimized (above-mentioned) displacement. D is
defined tolerance for adding attractive aspect to singularity
avoided posture to the attractive potential field. ‖𝐪tar− 𝐪rob ‖
and ‖𝐪GA − 𝐪rob‖ are the Euclidean distances between the
robot and the targets, which are only a function of position,
and m𝑖 is any positive number greater than zero.
Various types of repulsive potential functions were
proposed in the literatures. A common problem found in most
potential field methods, the goals non-reachable with obstacle
nearby, or the GNRON problem, identified by S.S. Ge and Y.J
Cui [17], can be handled using their proposed potential fields.
This function takes the following form:
Urep(𝐪) = {
1
2η (
1
ρRo−1
ρ0)2
ρRTn , 𝑖𝑓 ρRo ≤ 0
0, 𝑖𝑓 ρRo > 0
(14)
where 𝜂 is a positive scaling factor, 𝜌Ro = ‖𝐪obs − 𝐪rob‖
is the shortest Euclidean distance between the robot from the
obstacle surface, and 𝜌0 is the limit distance of the repulsive
potential field influence. In the mentioned equation, 𝜌RT
denotes the minimal Euclidean distance from robot to the
target. The introduction of the term 𝜌RTn ensures that the total
potential will reach its global minimum, if and only if the
robot reaches the target where 𝜌RT = 0.
End-Effector – Platform Path Planning
The gradient information is used for path planning of an
artificial potential field created using potential functions as an
input force in the system’s dynamics equations that drives the
robot to its desired destination while avoid collisions with
obstacles. For all the points beside the target point in the
5 Copyright © 2014 by ASME

configuration space, gradient information always exists and
serves as the input to the controller. This is simply letting:
𝐮 = −Kf∇𝐪Utotal (15)
In the kinematics or dynamics equations of the robot,
where 𝐮 is the input to the rrllcrnnoc; 𝐪 is the position vector
of the robot, Kf is a positive diagonal scaling matrix, and
Utotal is the total potential field of the workspace defined in
previous section. For the end-effecter we consider 𝐪𝑒 =[𝑥𝑒 𝑦𝑒 𝑧𝑒]
T and for the platform 𝐪𝑐 = [𝑥𝑐 𝑦𝑐 ]T, so the
velocities of the end-effecter and the platform can be obtained
from Eq. (16) and then the orientation of the platform will be
obtained from the nonholonomic constraint in Eq. (5).
�̇� = −Kf∇𝐪Utotal (16)
Note that, the value of 𝑚𝑖, 𝜉𝑖, η and Kf must be properly
select such that it will not create a sudden drop or exceed the
speed limit of the robot, however it is inevitable in online
motion planning. For avoiding this, velocity of the mobile
platform and end-effector should be coordinated in motion.
For this aim, the motion planning part should get feedback
consist of errors of end-effector and platform. By defining
error formation vector as form as [13]:
𝐳𝑒 = [
𝑥e𝑦e𝑧e
], 𝐳𝑐 = [𝑥𝑐𝑦𝑐] , 𝐙 = [𝐳𝑒 𝐳𝑐 ]T ,
𝐳𝑑𝑒 = [
𝑥𝑑𝑒𝑦𝑑𝑒𝑧𝑑𝑒
] , 𝐳𝑑𝑐 = [𝑥𝑑𝑐𝑦𝑑𝑐
] ,𝐙d = [𝐳𝑑𝑒 𝐳𝑑𝑐 ]T
�̃� = 𝐙d − 𝐙
(17)
while 𝐳𝑑𝑒 and 𝐳𝑑𝑐 denote vector of desired position of the
end-effector and platform respectively, 𝐳𝑒 and 𝐳𝑐 are the
vector of real position for end-effector and platform. Now,
motion feedback function can obtain as form as:
β(Z̃) = Z̃T Z̃ (18)
In order to include motion feedback we augment gradient
information by a nonlinear gain depend on the quantity �̃�. For
designing this nonlinear gain, we would like the robot to slow
down and stop as the robot get out of desired path or exceed
the speed limit. If the robot moves with an appropriate
velocity or track the desired trajectory, it is desired to move
towards its final goal, therefore, this function is given by:
�̇� = −α(�̃�) ∗ ∇𝐪UTotal (19)
where �̇� is the velocity of the robot and α(�̃�) is the
nonlinear gain as define by Eq. (18) as form as:
α(�̃�) =1
Kf ∗ β(�̃�) +1K
(20)
By selecting proper positive values for Kf, K the velocity
of the robot can control such that it will not exceed the speed
limit and have a smooth path.
4. MODEL-BASED CONTROL DESIGN
To complete the ideas which is presented in Fig. (2), the
focus of this section is the development of a dynamic-level
controller for the wheeled mobile manipulator that allows the
end-effector and platform to track a desired trajectory at the
task space. For achieving this, the dynamic model should be
rewritten in task space (Cartesian Space), so the nonlinear
control method separates the equations of motion into the end-
effector and platform independently.
In Eq. (4), the task space velocities are defined by the
vector �̇� and the independent joint-space velocities by 𝐯. For a
kinematically redundant system, a resolved acceleration for
the independent joint rates can be obtained by differentiating
of Eq. (9):
�̇� = 𝐉−1(�̈� − 𝐉̇𝐯) (21)
The final dynamic model equation of the system can be
achieved by substituting the Equation (21) in (11) and then
expressed in task space in the following form:
𝛕 = 𝐌x(�̈�) + 𝐂x + 𝐆x (22)
where,
𝐌x = (𝐁(𝐪))−1(𝐌(𝐪)𝐉−1)
Cx = (B(q))−1(C(q, q̇) − M(q)J−1J̇v)
Gx = (B(q))−1(G(q))
Since we use dynamically consistent equations for the
controller, equivalent-controlled closed loop control law in the
independent task space may be written, �̈� = �̈�d + 𝐤v�̇�+ 𝐤p𝐞,
where, �̈�d is the desired acceleration and 𝐞 = 𝐗d −𝐗 , so the
error dynamics is:
�̈� + 𝐤v�̇� + 𝐤p𝐞 = 𝟎 (23)
Therefore, by selecting gain matrices 𝐤v , 𝐤p and 𝐤 i
diagonal and positive definite guarantee the error dynamics
asymptotically converges to the origin. Finally, Computed
Torque Control law which affects the end-effector and
platform of the robot can be derived from Eq. (22):
𝛕eq = 𝐌x(�̈�d + 𝐤v�̇� + 𝐤p𝐞) + 𝐂x + 𝐆x (24)
5. SIMULATION RESULTS
In this section a nonholonomic mobile manipulator is
simulated in MATLAB to show how the combination of
mobile platform and redundant manipulator can eliminate the
set of singular points by performing extensive test. To discuss
about the singularity and obstacle avoidance algorithms which
proposed in section 3, four obstacles are chosen in such a way
that the robots have to pass through them.
The initial position of the end-effector of the robot is 𝑥𝑒 =−2.2, 𝑦𝑒 = −4.5 with 𝑧𝑒 = 0.4 and the mobile base 𝑥𝐶 =−2.2, 𝑦𝐶 = −4.5 with 𝜑 = 0 and the desired trajectory of the
end-effector and mobile base of the robot which artificial
potential field produce it, start from 𝑥𝑑𝑒 = −2, 𝑦𝑑𝑒 = −4 with
𝑧𝑑𝑒 = 0.5 𝑥𝐶𝑑 = −2, 𝑦𝐶𝑑 = −4 with 𝜑𝑑 =π
2. Center
6 Copyright © 2014 by ASME

coordinates (X,Y) and radii (R) of the obstacles are defined in
table III. The parameters of the artificial potential field are 𝜉 =0.5,𝜂 = 0.8, 𝑚1 = 𝑚2 = 𝑛 = 2.
TABLE 1: T HE PROPERTIES OF THE LINKS
Link Length Mass Center of
gravity 𝐈𝐱𝐱 𝐈𝐲𝐲 𝐈𝐳𝐳
1 0.5 0.6 0.25 0.04 0.04 0.0013
2 0.5 0.6 0.25 0.04 0.04 0.0013
3 0.5 0.6 0.25 0.04 0.04 0.0013
TAB . 2: T HE PROPERTIES OF THE PLATFORM
Distance from P to Pc d = 0.2 [m]
Distance from wheel to P b = 0.3 [m]
Radius of wheel r = 0.1 [m]
Mass of platform M = 70 [kg]
Moment of inertia of platform IZ = 6.12 [kg.m2]
TABLE III: OBSTACLES PROPERTIES
O bstacles X Y R
Obstacle 1 5.5 -1 2
Obstacle 2 -3 7 3
Obstacle 3 5.5 10 2
Obstacle 4 16 10 3
Units of length, moment of inertia and mass are (m),
(kg. m2) and (kg) respectively. The controller gains were
chosen so that the closed-loop system exhibits a critical
damping behavior and have been conducted by employing the
dynamical equations of the composite mobile robot system to
validate the designed control law given by eq. (24). Figures
(5) and (7) illustrate the path traversed by the mobile base and
End-effector in 3D and 2D respectively. As expected, the
mobile base starts from initial location (−2.2, −4.5) and
passes through target location at (6.5,14). End-effector starts
from initial location (0.4, −2, −4) and passes through target
location at (6.5,14,0.7). The Figure (4), (5) illustrate the
errors of the End-effector and platform respectively.
By using the mentioned algorithm which is proposed in
Section 3, it is possible to find inverse kinematic solutions for
all points within a reasonable amount of time. Figures (3) and
(4) are the joint angles and displacement of the mobile base
respectively. Therefore, by these variations, the robot avoids
from singular points and move towards to the goal while
avoids from obstacles.
Figure 3: Variation of joint angles versus time
Figure 4: Mobile base displacement
Figure 5: Desired path and path of End-effector and position of the obstacles
0 20 40 60 80 100-80
-60
-40
-20
0
20
40
60
Time[s]
Arm
s A
ng
les [D
eg
ree
]
1
2
3
0 20 40 60 80 100-5
0
5
10
15
Time[s]
Po
stio
n o
f R
ob
ot B
ase
[m
]
x-axis Positon of Robot Base
Y-axis Positon of Robot Base
-5 0 5 10 15 20
-5
0
5
10
15
0
1
2
X [m]
Y [m]
Z [m
]
7 Copyright © 2014 by ASME

Figure 6: Errors of the End-effector position
Figure 7: Desired path and path of platform and position of the obstacles in
X, Y plane
Figure 8: Errors of the platform position
6. CONCLUSIONS
In this paper, an efficient inverse-forward scheme based
on evolutionary algorithm is used to solve the inverse
kinematic problem of a redundant manipulator. In this method,
an evolutionary algorithm is used to find optimum solution to
escape from singularity and approach to desired target of end-
effector position. First of all, optimum singularity avoided
postures are found by evolutionary algorithm and then,
artificial potential field considered singularity avoided
postures as attractive potential points . The artificial potential
field is used to navigate the wheeled mobile manipulator in an
environment containing both repulsive and attractive
potentials that steer the mobile manipulator to avoid the
obstacles and singularity postures and attract to the target
simultaneously. Kinematics and dynamics modeling of robot
manipulator is derived to define redundant solutions. A
dynamic controller is designed for motion control of a mobile
manipulator as a nonholonomic system in an environment
with obstacles. The powerful aspects of evolutionary
algorithms and artificial potential field are combined for the
purpose of singularity and obstacle avoidance problems in
robot manipulator control. The simulation analysis has
demonstrated that the proposed intelligent redundant
manipulator can effectively solved singularity and obstacle
avoidance problems.
REFERENCES
[1] Farbod Fahimi, “Autonomous Robots, Modeling, Path
Planning, and Control”, Springer Science Business Media,
LLC 2009. [2] Viswanathan, A., Jouaneh, M., Datseris , P. and Palm, W.,
“A manufacturing system for automated production of
polystyrene molds”, IEEE Robotics & Automation
Magazine, Vol. 3, No. 3, 1996.
[3] S. Bhattacharya, h. Hatwal and a. Ghosh, “Comparison of
an Exact and an Approximate Method of Singularity
Avoidance in Platform Type Parallel Manipulators”, Mech.
Mach. Theory Vol. 33, No. 7, pp. 965±974, 1998.
[4] Dietrich, A., Wimbock, Albu-Schaffer; Hirzinger, G.
“Reactive Whole-Body Control: Dynamic Mobile
Manipulation Using a Large Number of Actuated Degrees
of Freedom” Robotics & Automation Magazine, IEEE
Volume: 19, Issue: 2, 2012.
[5] Herbert G. Tanner , Savvas G. Loizou and Kostas J.
Kyriakopoulos “Nonholonomic Navigation and Control of
Cooperating Mobile Manipulators” Journal of Transactions
on Robotics and Automation, IEEE, Volume: 19, Issue: 1,
2003.
[6] Swagat Kumar, Laxmidhar Behera, T.M. McGinnity
“Kinematic control of a redundant manipulator using an
inverse-forward adaptive scheme with a KSOM based hint
generator”, Journal of Robotics and Autonomous Systems
pp. 622-633, 2010.
[7] Glenn D. White, Rajankumar M. Bhatt, Venkat Krovi,
“Dynamic Redundancy Resolution in a Nonholonomic
Wheeled Mobile Manipulator”, Journal of Robotica,
Volume: 25, Issue: 2, 2007.
[8] E. Macho, O. Altuzarra, E. Amezua, A. Hernandez,
“Obtaining configuration space and singularity maps for
parallel manipulators”, Journal of Mechanism and Machine
Theory Volume: 44, 2009.
[9] M.H. Korayem, M. Nazemizadeh, V. Azimirad, “Optimal
trajectory planning of wheeled mobile manipulators in
cluttered environments using potential functions”, Journal
of Scientia Iranica, 2011.
[10] Mamoru Minami, Hiroshi Tanaka and Yasushi Mae
“Avoidance Ability of Redundant Mobile Manipulators
0 20 40 60 80 100-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Time [s]
Err
or
Error of X [m] of End-Effector
Error of Y [m] of End-Effector
Error of Z [m] of End-Effector
-5 0 5 10 15 20-5
0
5
10
15
X [m]
Y [m
]
0 20 40 60 80 100
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Time [s]
Err
or
Error of X [m] of mobile base
Error of Y [m] of mobile base
Error of [rad] of mobile base
8 Copyright © 2014 by ASME

During Hand Trajectory Tracking”, Journal of Advanced
Computational Intelligence and Intelligent Informatics,
Vol.11 No.2, 2007. [11] Alessandro De Luca, Giuseppe Oriolo Paolo,
Robuffo Giordano “Kinematic Modeling and
Redundancy Resolution for Nonholonomic Mobile
Manipulators”, Proceedings of the 2006 IEEE International
Conference on Robotics and Automation Orlando, Florida,
2006.
[12] Henzeh Leeghim, Hyoung Lee, Dong-Hun Lee, Hyochoong Bang and Jong-Oh Park, “Singularity Avoidance of Control Moment Gyros by Predicted Singularity Robustness: Ground Experiment”, IEEE Transactions on Control Systems Technology, Vol. 17, No. 4, 2009.
[13] Adel Abbaspour, S. Ali A. Moosavian, Hadi Zare and Khalil Alipour, “Formation Control and Obstacle Avoidance of Cooperative Wheeled Mobile Robots,” First RSI/ISM International Conference on Robotics and Mechatronics, IEEE, ICRoM 2013, Sharif University, Tehran, Iran.
[14] Oriol Bohigas, Michael E. Henderson, Llu ı́s Ros, Montserrat Manubens, and Josep M. Porta, “Planning Singularity-Free Paths on Closed-Chain Manipulators”, IEEE Transactions on Robotics, Vol. 29, No. 4, 2013.
[15] Alexander Dietrich, Thomas Wimb¨ock, Alin Albu-Sch¨affer, and Gerd Hirzinger, “Singularity Avoidance for Nonholonomic, Omnidirectional Wheeled Mobile Platforms with Variable Footprint”, IEEE International Conference on Robotics and Automation, 2011.
[16] Adel Abbaspour, Khalil Alipour and S. Ali. A Moosavian, “Finding Near-Optimal Formation of Cooperative Wheeled Mobile Robots in Payload Transportation,” 20th Annual International Conference on Mechanical Engineering, ISME 2012, Shiraz, Iran.
[17] S. S. Ge and Y. J. Cui “New Potential Functions for Mobile Robot Path Planning”, IEEE Transactions on Robotics and Automation, vol. 16, no. 5, 2000.
Appendix I: The details of matrix J:
[ J11 J12 J13 J14 J15J21 J22 J23 J24 J250J41J51
0J42J52
000
J3400
J3500 ]
And:
J11 =𝑅
2𝑏[𝑏𝑐𝑜𝑠(𝜑) − 𝑑𝑠𝑖𝑛(𝜑)] −
𝑅
2𝑏[𝑙2 𝑐𝑜𝑠(𝜃2) 𝑠𝑖𝑛(𝜑 + 𝜃1) +
𝑙3 𝑐𝑜𝑠(𝜃2 +𝜃3) 𝑠𝑖𝑛(𝜑 +𝜃1)]
J12 =𝑅
2𝑏[𝑏𝑐𝑜𝑠(𝜑) + 𝑑𝑠𝑖𝑛(𝜑)] +
𝑅
2𝑏[𝑙2 𝑐𝑜𝑠(𝜃2) 𝑠𝑖𝑛(𝜑 + 𝜃1) +
𝑙3 𝑐𝑜𝑠(𝜃2 +𝜃3) 𝑠𝑖𝑛(𝜑 +𝜃1)]
J13 = −[𝑙2 𝑐𝑜𝑠(𝜃2) 𝑠𝑖𝑛(𝜑 + 𝜃1) + 𝑙3 𝑐𝑜𝑠(𝜃2 + 𝜃3) 𝑠𝑖𝑛(𝜑 + 𝜃1)]
J14 = −[𝑙2 𝑠𝑖𝑛(𝜃2) 𝑐𝑜𝑠(𝜑 + 𝜃1) + 𝑙3 𝑠𝑖𝑛(𝜃2 +𝜃3) 𝑐𝑜𝑠(𝜑 + 𝜃1)]
J15 = −[𝑙3 𝑠𝑖𝑛(𝜃2 + 𝜃3) 𝑐𝑜𝑠(𝜑 + 𝜃1)]
J21 =𝑅
2𝑏[𝑏𝑠𝑖𝑛(𝜑) + 𝑑𝑠𝑖𝑛(𝜑)] +
𝑅
2𝑏[𝑙2 𝑐𝑜𝑠(𝜃2) 𝑐𝑜𝑠(𝜑 + 𝜃1)+
𝑙3 𝑐𝑜𝑠(𝜃2 +𝜃3) 𝑐𝑜𝑠(𝜑 + 𝜃1)]
J22 =𝑅
2𝑏[𝑏𝑠𝑖𝑛(𝜑) − 𝑑𝑠𝑖𝑛(𝜑)] −
𝑅
2𝑏[𝑙2 𝑐𝑜𝑠(𝜃2) 𝑐𝑜𝑠(𝜑 + 𝜃1)+
𝑙3 𝑐𝑜𝑠(𝜃2 +𝜃3) 𝑐𝑜𝑠(𝜑 + 𝜃1)]
J23 = 𝑙2 𝑐𝑜𝑠(𝜃2) 𝑐𝑜𝑠(𝜑 + 𝜃1)+ 𝑙3 𝑐𝑜𝑠(𝜃2 + 𝜃3) 𝑐𝑜𝑠(𝜑 +𝜃1)
J24 = −[𝑙2 𝑠𝑖𝑛(𝜃2) 𝑠𝑖𝑛(𝜑 + 𝜃1) + 𝑙3 𝑠𝑖𝑛(𝜃2 +𝜃3) 𝑠𝑖𝑛(𝜑 +𝜃1)]
J25 = −[𝑙3 𝑠𝑖𝑛(𝜃2 + 𝜃3) 𝑠𝑖𝑛(𝜑 + 𝜃1)]
J34 = 𝑙2 𝑐𝑜𝑠(𝜃2)+ 𝑙3 𝑐𝑜𝑠(𝜃2 + 𝜃3)
J35 = 𝑙3 𝑐𝑜𝑠(𝜃2 + 𝜃3)
J41 =𝑅
2𝑏[𝑏𝑐𝑜𝑠(𝜑) −𝑑𝑠𝑖𝑛(𝜑)]
J42 =𝑅
2𝑏[𝑏𝑐𝑜𝑠(𝜑) +𝑑𝑠𝑖𝑛(𝜑)]
J51 =𝑅
2𝑏[𝑏𝑠𝑖𝑛(𝜑) + 𝑑𝑐𝑜𝑠(𝜑)]
J52 =𝑅
2𝑏[𝑏𝑠𝑖𝑛(𝜑) − 𝑑𝑐𝑜𝑠(𝜑)]
We can obtain the determinant of the J as form as:
𝑑𝑒𝑡(J) = 0.003(cos(𝜃3) + 1)(sin(𝜃2 + 𝜃3) − sin (𝜃2))
Appendix II: The model of dynamic
Let 𝑟1 , 𝑟2 , 𝑟3 denote the distance between joints and the center
of mass of links, as shown in fig. 1, the coordinates of the
center of mass of first link can be obtain:
{
𝑥1 = 𝑥𝑐𝑦1 = 𝑦𝑐𝑧1 = 𝑟1
The coordinates of the center of mass of second link can be
express as follows:
{𝑥2 = 𝑥1+ 𝑟2 𝑐𝑜𝑠 (𝜃2 )𝑐𝑜𝑠(𝜑 + 𝜃1)𝑦2 = 𝑦1 + 𝑟2𝑐𝑜𝑠 (𝜃2 )𝑠𝑖𝑛(𝜑 + 𝜃1 )
𝑧2 = 𝑙1+ 𝑟2 𝑠𝑖𝑛(𝜃2 )
The coordinates of the center of mass of third link is:
{𝑥2 = 𝑥1+ 𝑙2 𝑐𝑜𝑠(𝜃2 ) 𝑐𝑜𝑠(𝜑 +𝜃1 ) + 𝑟3 𝑐𝑜𝑠(𝜃2 + 𝜃3 )𝑐𝑜𝑠(𝜑 + 𝜃1 )
𝑦2 = 𝑦1 + 𝑟2 𝑐𝑜𝑠(𝜃2 ) 𝑠𝑖𝑛(𝜑 + 𝜃1 ) + 𝑟3 𝑐𝑜𝑠(𝜃2 + 𝜃3 ) 𝑠𝑖𝑛(𝜑 + 𝜃1 )
𝑧2 = 𝑙1+ 𝑙2 𝑠𝑖𝑛(𝜃2 ) + 𝑟3𝑠𝑖𝑛 (𝜃2 + 𝜃3 )
9 Copyright © 2014 by ASME

The totally kinematic energy can be written as form as:
𝑇 =1
2(𝑚𝑝 + 2𝑚𝑤)(𝑥̇𝑐
2+ �̇�𝑐2)+
1
2(𝐼𝑧𝑝 + 2𝐼𝑧𝑤 +
2𝑚𝑤(𝑑2+ 𝑏2)) �̇� 2+
1
2(𝐼𝑤𝑦 �̇�𝑟
2) +
1
2(𝐼𝑤𝑦 �̇�𝐿
2) +
2𝑚𝑤𝑑�̇�(𝑥̇𝑐 𝑠𝑖𝑛(𝜑) − �̇�𝑐 𝑐𝑜𝑠(𝜑)) +1
2𝑚1(𝑥̇1
2+ �̇�12 + �̇�1
2)+1
2𝐼𝑧𝑧(�̇�1+ �̇�1)
2+
1
2𝑚2(𝑥̇2
2+ �̇�22 + �̇�2
2)+1
2𝐼𝑥𝑥 (�̇�2
2) +
1
2𝐼𝑦𝑦 ((�̇� + �̇�1)𝑐𝑜𝑠 (𝜃2 ))
2
+1
2𝐼𝑧𝑧 ((�̇� + �̇�1)𝑠𝑖𝑛 (𝜃2 ))
2
+1
2𝑚3(𝑥̇3
2+ �̇�32+ �̇�3
2)+1
2𝐼𝑥𝑥(�̇�2 + �̇�3)
2+
1
2𝐼𝑦𝑦 ((�̇� +
�̇�1)𝑐𝑜𝑠 (𝜃2 ))2
+1
2𝐼𝑧𝑧 ((�̇� + �̇�1)𝑠𝑖𝑛 (𝜃2 ))
2
And the totally potential energy is:
𝑈 = 𝑚1𝑔𝑟1 +𝑚2𝑔(𝑙1+ 𝑟2 𝑠𝑖𝑛(𝜃2 )) + 𝑚3𝑔(𝑙1+𝑙2𝑠𝑖𝑛(𝜃2 ) + 𝑟3𝑠𝑖𝑛 (𝜃2 + 𝜃3 ))
The dynamical equations of the composite mobile robot arm
system are obtained from Lagrange's equations:
𝑑
𝑑𝑡(𝜕ℒ
𝜕�̇�𝑘) − (
𝜕ℒ
𝜕𝑞𝑘) = 𝑓𝑘 − ∑ 𝜆𝑗
𝑚𝑗=1 𝑎𝑗𝑘
Where ℒ(𝑞, �̇�) = 𝑇(𝑞, �̇�) − 𝑈(𝑞), 𝑓𝑘 are the forces or torques
acted on the platform and the links, 𝜆𝑗 is the Lagrange
multiplied coefficient. Now we can determine the dynamic
equation of the robot.
𝐌(𝐪) �̈� + 𝐂(𝐪, �̇�) +𝐆(𝐪) = 𝐁(𝐪)𝛕 +𝐀T (𝐪)𝛌
10 Copyright © 2014 by ASME




![Singularity - easybuilders.github.ioeasybuilders.github.io/easybuild/files/EUM17/20170208-1_Singularity… · Singularity Workflow 1. Create image file $ sudo singularity create [image]](https://img.pdfslide.net/doc/110x75/5f0991027e708231d4277151/singularity-singularity-workflow-1-create-image-file-sudo-singularity-create.jpg)





















![[William Sleator] Singularity](https://img.pdfslide.net/doc/110x75/5466dabbb4af9f4e3f8b55e2/william-sleator-singularity.jpg)