Embed Size (px)
Citation preview

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 1
!
!Reliable Operations of !
Unmanned Ground Vehicles: !Research at the !
Ground Robotics Reliability Center!!
http://grrc.engin.umich.edu/ !!
Dawn M. Tilbury, Professor!Mechanical Engineering!
College of Engineering, University of Michigan, Ann Arbor!!!
College of Engineering !University of Michigan!Ann Arbor!
TARDEC: U.S. Army Tank Automotive Research, Development and Engineering Center

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 2
Reliable Operations!
Critical Unmet Needs in Unmanned Ground Vehicles and Robotics!• Tactical Behaviors • Autonomous Controls • 360 Degree Awareness • Safe Operations of Robots Around Humans • Reliability & Manufacturing • Machine-Human Interface • Platform Mobility • Tele-Operation

Milestones of the GRRC • Established with a few projects in 2007 • Kick-off as GRRC in August 2008 • iRobot as industry member; PackBot donation • Focus on Reliable Operations of Ground Robotics Center Goals: • Develop research to support reliable performance and operation of
unmanned ground vehicles (UGVs) and robots. • Educate graduate students in reliable design and operation of
UGVs through research projects, curriculum and courses. • Increase the impact and speed of delivering cutting-edge reliable
UGV technology readiness for the soldier
Ground Robotics!Reliability Center
Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 4
Challenges in UGV Reliable Operation!
• Robotics has grown out of a hobbyist mindset (i.e., prototypes, demos)!
• Serious reliability problems!– Low mean-time-between-failures (reported
times of 6-24 hrs)!• Lack of existing research in reliable
operations of UGV!– Automotive industry produces mature,
complex products!– Industrial manipulators perform repetitive
tasks in structured environments!• Goal: Develop research to improve
reliable operation of UGVs!!
“The robotics industry faces many of the same challenges that the personal computer business faced 30 years ago”

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 5
Four Pillars of Reliable Operations!New types of sensors not proven for usage in the field
Manufacturing defects cause component failures (pinched wires in assembly)
Obstacles Slopes, ditches Dust, mud, rocks Temperature
Drive up steep slope Turn left instead of right Exceed motor limits
Manufacturing Design
User Environment
Reliable UGV
Operations
Specification
Technology
Standards Procedures
Human
Interference
Hazard
Impact
Mistakes
Slips
Machines
Interface

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 6
Reliable Behavior by Instruction!• Interactive instruction!
– Human guides robot during mission!
– Robot can independently perform known tasks!
– Robot requests guidance when unfamiliar situation occurs!
• Situational learning !– Leverage context and
shared knowledge!
Laird

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 7
Adjustable Autonomy!• Cooperative control between robot and
operator!– Robot has autonomous behaviors!– Can ask questions of the operator to gain
information about environment!• Markov Decision
Process!– Reward for states!– Cost for questions!– Goal: maximize
expected reward !
UGV
Des(na(on
Human Crowd
Human Crowd
UAV
Durfee and Bajeva

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 8
Exploration and Inventory of Human-Filled Spaced!• Long-term goals:!
– Robots in an unknown environment!
– Build a map, identify people, objects!
– Coordinate with commanders!
• Current work: Sensor fusion!– Laser plus vision!
Olson

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 9
Exploration and Inventory of Human-Filled Spaces!
2D segments extracted using image-only method: Some segment boundaries missing.
Segmentation using only a color difference criterion: Failure to segment floor and trash bin correctly.
Segmentation with only a surface normal criterion: Rear wall has missing segments
Our Method, which combines both laser and camera data.
Olson

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 10
• Team Michigan with 14 robots, competition in Australia!
• Autonomous localization,map-building, OOI detection !
• Minimal humanintervention!
MAGIC Winners!Olson

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 11
Augmented/Virtual Reality Interfaces!• Improve operator performance and reliability
through improved user interface!– Add augmented reality to video feed to indicate
distance to obstacles!– Add virtual reality for a “birds-eye” view of robot
in workspace!
Augmented Reality Scene Virtual Reality Scene Robot Platform
Tilbury

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 12
Power/energy for mobile robots!Peng & Filipi

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 13
Integrated Power Systems for Improved Mobility!• Model loads on mobile robots!
– Sensors, communication, processors, etc.!– Off-road driving cycles characterization!
• Model energy conversion/storage devices!– Understand limitations!– Design guidelines!
• Leverage hybrid cardesign methods!
• Goal: 8-hour missionduration for UGV!
Peng & Filipi

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 14
• Goal: Inspect an area with autonomous UGV while minimizing energy usage!
• Approach:!– Compare energy usage along
existing coverage paths!– Adapt paths to further reduce
energy needs!• Gradual turns instead of
turn-in-place!• Optimize velocity profile along
straight-line segments!
Energy-Aware Coverage Control!Atkins & Tilbury
Boustrophedon path
Spanning Tree path
Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 15
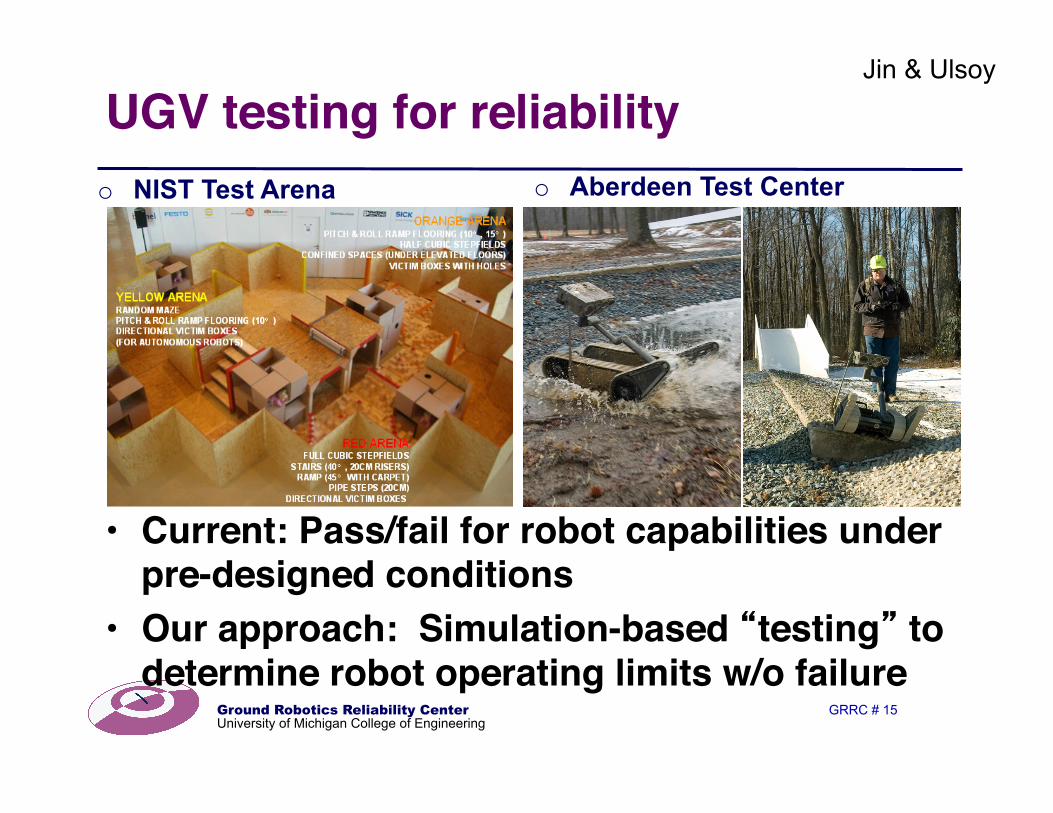
UGV testing for reliability !
• Current: Pass/fail for robot capabilities under pre-designed conditions!
• Our approach: Simulation-based “testing” to determine robot operating limits w/o failure!
o NIST Test Arena o Aberdeen Test Center
Jin & Ulsoy
Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 16
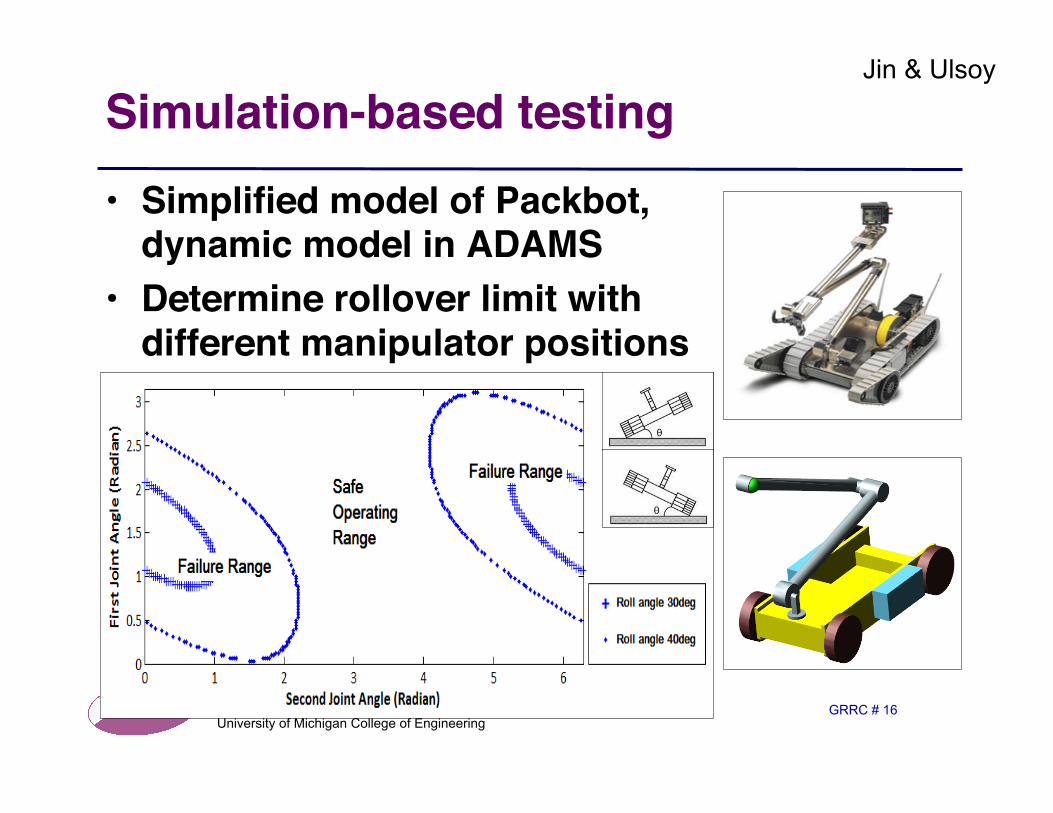
Simulation-based testing!• Simplified model of Packbot,
dynamic model in ADAMS!• Determine rollover limit with
different manipulator positions!
Jin & Ulsoy

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 17
Robust mechanical design!• Adding a torsional spring can reduce the
required torque on the manipulator arm!• Design optimized for nominal trajectory!• Q: How does the extra complexity affect
reliability?!
Figure 2) Model joint drive train schematic.
New design
New model
Ulsoy

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 18
Moving Obstacle Avoidance with Sensor Uncertainty!• Velocity occupancy space gives weights
based on probability of collision with obstacles for different robot velocities!
• Laser-scan data to estimate obstacles position and velocities!
• Combine negative weights of obstacles with positive weightfor goal position!
Peng & Ulsoy

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 19
Indoor position tracking!• GPS unavailable, video feed disorienting!• Solution: Dead-reckoning plus heuristics!
(a)
(b)
Figure 1: With our newly proposed Heuristics-enhanced Odometry (HEO) method, operators of remotely-controlled mobile robots will see the trajectory of their robot on their console, even in GPS-denied, indoor environments. (a) Conventional odometry-derived trajectory in a GPS denied indoor environment. (b) Trajectory of same indoor trip, but now with HEO.
Same gyro & odometry, after applying our
heuristics algorithm.
(a)
(b)
Figure 1: With our newly proposed Heuristics-enhanced Odometry (HEO) method, operators of remotely-controlled mobile robots will see the trajectory of their robot on their console, even in GPS-denied, indoor environments. (a) Conventional odometry-derived trajectory in a GPS denied indoor environment. (b) Trajectory of same indoor trip, but now with HEO.
Conventional gyro & odometry-derived trajectory in a GPS-denied
indoor environment.
Borenstein

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 20
Leader-Follower Navigation without Line-of-Sight!• Personal dead-reckoning on leader plus
simple IMU on robot follower!• To avoid unbounded heading errors, impose
synchronization on heading!• Up to one minute lag accommodated!
Borenstein

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 21
Robotics testbeds!• Packbot with AWARE2
software environment!• SuperDroid wheeled and
tracked robots!!
UM’s PackBot (donated by iRobot)
SuperDroid wheeled ATR robot
kit. Payload: >20 lbs
SuperDroid LT tracked ATR robot kit. Payload >10 lbs
Borenstein

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 22
Robotics testbeds!• Integrated
power testbed !
Pan/Tilt/Zoom Video Camera
3D Laser Range Finder(HOKUYO UTM-30-LX)
Solar Panel (expandable)
200 × 50 mmAll-terrain
Pneumatic tire
Double WishboneIndependent Suspension
On-board Computer and
Electronics
Li-ion Battery Pack
Fuel Tank
Muffler Modified Model Engine
Starter/Alternator
Power Electronics
Maxon EC Motor(4 Quadrant Operation, Regenerative Braking)
AdjustableShock Absorber
• Solar Integrated Plug-in Hybrid Power System• Extended mission time and capability; Quick refueling• Battery charged on board or recharge dock• Autonomous energy-sustaining strategy• Silent mode; Regenerative Braking
• Improved Mobility• Skid-steering• 6 Wheel Drive• Independent Suspension• Travel over Rough terrain• Stair Climbing
Peng & Filipi

Ground Robotics Reliability Center University of Michigan College of Engineering
GRRC # 23
Summary!• Research in Reliable Operations of UGVs!• Four research areas!
– Behavior reliability!– Power and mobility!– Design and control for reliability!– Testbeds, integration, and validation!
• Partner with US-Army TARDEC and Industry!





























