Embed Size (px)
Citation preview

Hindawi Publishing CorporationJournal of SensorsVolume 2013 Article ID 619570 10 pageshttpdxdoiorg1011552013619570
Research ArticleAugmented Reality to Support On-Field Post-ImpactMaintenance Operations on Thin Structures
Luca De Marchi1 Alessandro Ceruti2 Alessandro Marzani3 and Alfredo Liverani2
1 Department of Electrical Electronic and Information Engineering (DEI) University of Bologna Viale del Risorgimento 2 40136 Italy2 Department of Industrial Engineering (DIN) University of Bologna Viale del Risorgimento 2 40136 Italy3 Department of Civil Chemical Environmental and Materials Engineering (DICAM) University of Bologna Viale del Risorgimento2 40136 Italy
Correspondence should be addressed to Alessandro Marzani alessandromarzaniuniboit
Received 25 July 2013 Accepted 18 September 2013
Academic Editor Salvatore Salamone
Copyright copy 2013 Luca De Marchi et alThis is an open access article distributed under theCreative CommonsAttribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper proposes an augmented reality (AR) strategy in which a Lamb waves based impact detection methodology dynamicallyinteracts with a head portable visualization device allowing the inspector to see the estimated impact position (with its uncertainty)and impact energy directly on the plate-like structure The impact detection methodology uses a network of piezosensors bondedon the structure to be monitored and a signal processing algorithm (the Warped Frequency Transform) able to compensate fordispersion the acquired waveformsThe compensated waveforms yield to a robust estimation of Lamb waves difference in distanceof propagation (DDOP) used to feed hyperbolic algorithms for impact location determination and allow an estimation of theuncertainty of the impact positioning as well as of the impact energy The outputs of the impact methodology are passed to avisualization technology that yielding their representation in Augmented Reality (AR) is meant to support the inspector duringthe on-field inspectiondiagnosis as well as the maintenance operations The inspector in fact can see interactively in real time theimpact data directly on the surface of the structure To validate the proposed approach tests on an aluminum plate are presentedResults confirm the feasibility of the method and its exploitability in maintenance practice
1 Introduction
Augmented reality (AR) is a live direct or indirect viewof a physical real-world environment whose elements areaugmented (or supplemented) by computer-generated inputsuch as sound graphics images or video data AR was firstused for military industrial and medical applications butit was soon applied to numerous commercial and enter-tainment areas [1] Numerous studies developments and app-lications ofARhave been proposed as reported in the surveysby Azuma [2] Azuma et al [3] Krevelen and Poleman [4]and Wang et al [5] and modern trends on AR can befound in some very recent papers [6ndash8] However to thebest of the authorsrsquo knowledge AR has been scarcely usedin nondestructive testing and structural health monitoring
(NDTSHM) applications probably due to the requiredmultidisciplinary expertises including but not limited tosolid mechanics numerical simulation signal processingand data visualizationThe idea to harness AR for developingsupporting and improving NDTSHM is an innovative topicwhich should be better addressed by the literature
Theuse of augmented reality (AR) in fact could boost theusability of some NDTSHM applications in both technicaland economic sense For instance AR can be used inconjunction with visual based techniques to gain insight onthe structural health status from the visual appearance ofcracks [9] or to provide information in dead angle areas suchas black walls or partitions [10] Alternatively in ultrasonicbased approaches AR can be exploited to provide to theinspector an immediate visual representation of the target of
2 Journal of Sensors
the ultrasonic inspection generally a flawholedamage over-imposed to the structure under testing This would supportthe inspector in the inspectiondiagnosis and maintenanceprocess through
(i) facilitating the understanding of the results of theinspection
(ii) providing an immediate real size dimension of thedamage compared to that of the structure
(iii) avoiding delay and possible mistakes while transfer-ring the inspection results to the structure
In this paper an AR approach is proposed to visualizethe outcomes of a nondestructive Lamb waves based impactdetection methodology directly on plate-like structures Forthe sake of validating the proposed approach the plate isimpacted through the stroke of an instrumented hammerby the experimenter in known positions and the AR visu-alization is performed in real time In a realistic industrialscenario such AR approach could be exploited during themaintenance phase after the impact has taken place drivingthe operator on the impact position to check if the componenthas been damaged or not and supporting the final decisionwhether maintenance actions are required
Impact detection in plate-like structures via guided waveshas been the focus of many researches over the last years[11ndash20] Generally a network of piezoelectric sensors is usedto detect in passive mode the Lamb waves produced inthe plate by the impact The information gathered by thesensors is sent to a central unit where the acquired responsesare processed to estimate the position of the impact andeventually its energy
Thanks to the low weight and low power consumptionof the technology such approaches can be proficiently usedin SHM of plate-like structures In practice whenever animpact occurs the SHM system activate an alert Once thealert is detected an operator should retrieve the acquiredinformation and take a decision about the maintenancestrategy In particular the operator has to carefully verifywhether the impact has damaged or not the monitoredstructure This is particularly important for composite plate-like structures since the impact effects may generate damageinvisible or barely visible at human eyes complicating thusthe maintenance operator tasks Therefore the effectivenessof methods and tools such as AR aimed at improving thedamage detectability should be investigated
In such direction this paper proposes a first attempton the use of AR for post-impact data visualization on thestructure In particular from the acquired waveforms theimplemented tool provides to the inspector the estimatedimpact position a measure of the uncertainty in the localiza-tion and an estimation of the impact energy To the authorsrsquoopinion both pieces of information could avoid false alarmsof the SHM system and prevent false assumptions duringthe inspection phase A case study is proposed to show themethodology and its final outcome
The work is organized as follows Basic information onAR is provided in Section 2 The proposed algorithm forimpact localization including uncertainty and impact energy
estimation is presented in Section 3 In Section 4 the ARenvironment and tools are presented and an experimentalvalidation is proposed through a case study in Section 5 Theconclusions end the paper
2 Augmented Reality
Augmented reality (AR) is a real-time technique [21 22]allowing the experimenter to see virtual objects or scenariosuperimposed on real-world images interactively [2 3 23]Image acquisition Calibration Tracking Registration andDisplay are the main process steps required for AR [24] Abrief description of each step is provided in the following
Image Acquisition The Image acquisition is usually obtainedthrough a camera embedded in a device generally carried onthe experimenterrsquos head as the one represented in Figure 1(a)
Calibration The Calibration step is required to measureprecisely the internal camera parameters and to evaluate andcorrect image distortion This operation must be performedonly once since it depends on the camera features only
Tracking Tracking is required to evaluate the pose (ieorientation in space in terms of pitch roll and yaw angles)and position of the camera with respect to an external ref-erence system several techniques can be applied dependingon the need of the final application but all these methodscan be grouped in sensor-based and vision-based track-ing techniques Sensor-based tracking techniques requireGPSaccelerometers magnetometers acoustical and opticalor mechanical devices to detect the pose and position ofthe experimenter [25] Vision-based tracking techniques arebased upon the evaluation of the size and optical deformationof a geometrical marker to estimate the relative positionbetween the marker and the camera reference system [26]
Registration The Registration is the procedure applied tosynchronize the virtual image or scenario with the externalview (real-word image) accordingly with the userrsquos headmovements [27] It uses the information gathered by Calibra-tion and Tacking phases and exploits the spatial coordinatestransformation from the 3D scene to a 2D image
For this purpose first the simple pinhole camera model(see Figure 2 and [28]) based on a perspective projectionis used to describe the relationship between the coordinatesof the generic point 119876 equiv 119909
119888 119910119888 119911119888 in the 3D space and
its projection onto the 2D screen plane 119902 equiv 119909119904 119910119904 Simple
geometry shows that if the distance of the screen plane tothe centre of projection 119874
119888 that is the ideal pinhole of the
camera is denoted by 119891 the screen coordinates are related tothe object coordinates as
[119909119904
119910119904
] =119891
119911119888
[119909119888
119910119888
] (1)
Next each point 119902 on the screen plane can be related toa pixel of an image if the dimensions of the screen plane are
Journal of Sensors 3
(a)
80mm
80m
m
(b)
Figure 1 (a) Vuzix STAR 1200 glasses and (b) Marker features
Principal planeScreen plane
Optical axisxs
ys
0s0c
q
xc
yc
zmym xm xy
OΔy Δx
Q
Zc equiv Zs
PZT-iPlate
Camera
f
Figure 2 Plate 119909 119910 Marker 119909119898 119910119898 119911119898 Camera 119909
119888 119910119888 119911119888 and
Screen 119909119904 119910119904 119911119904 coordinate systems
known Denoting by 119906 and V the row and column of the pixelwith respect to 119906
0and V
0 the row and column of the pixel
in the origin of the screen plane coordinate system (119874119904) and
being 119878119909and 119878119910scale factors in 119909
119904and 119910
119904axis (pixelmeter)
respectively such relation is
[119906
V] = [
119878119909
0 1199060
0 119878119910
V0
][
[
119909119904
119910119904
1
]
]
(2)
Combining (1) and (2) and exploiting homogeneous coor-dinates (4-dimensional) a transformation between pixels andcoordinates in the 3D space can be obtained as
[[[
[
119911119888119906
119911119888V
119911119888
1
]]]
]
=[[[
[
119878119909119891 120574 119906
00
0 119878119910119891 V0
0
0 0 1 0
0 0 0 1
]]]
]
[[[
[
119909119888
119910119888
119911119888
1
]]]
]
= P[[[
[
119909119888
119910119888
119911119888
1
]]]
]
(3)
in which the parameter 120574 related to the camera features isintroduced to account for the distortion effects between theaxis 119906 and V [29] The parameters of the matrix P known
as camerarsquos perspective matrix are obtained by means of theCalibration process
Subsequently the relative position in the 3D spacebetween the marker and the camera coordinate systems isintroduced
[[[
[
119909119888
119910119888
119911119888
1
]]]
]
=[[[
[
11987711
11987712
11987713
119879119909
11987721
11987722
11987723
119879119910
11987731
11987732
11987733
119879119911
0 0 0 1
]]]
]
[[[
[
119909119898
119910119898
119911119898
1
]]]
]
= [R T
01times3
1][[[
[
119909119898
119910119898
119911119898
1
]]]
]
= M[[[
[
119909119898
119910119898
119911119898
1
]]]
]
(4)
where the 3 times 3 Rotation matrix (R) and a 3 times 1 Translationvector (T) computed in real time by the Tracking phasedescribe the pose and position of the camera with respect tothe marker reference system The matrixM is also known asthe external parameters matrix Finally substituting (4) into(3) yields a dynamic relation between each point described in3D marker coordinate system and its representation on a 2Dvirtual image
[[[
[
119911119888119906
119911119888V
119911119888
1
]]]
]
=[[[
[
119878119909119891 119896 119906
00
0 119878119910119891 V0
0
0 0 1 0
0 0 0 1
]]]
]
[[[
[
11987711
11987712
11987713
119879119909
11987721
11987722
11987723
119879119910
11987731
11987732
11987733
119879119911
0 0 0 1
]]]
]
[[[
[
119909119898
119909119898
119911119898
1
]]]
]
= PM[[[
[
119909119898
119910119898
119911119898
1
]]]
]
(5)
Since the marker and the plate reference systems areparallel and shifted of known quantities along the 119909 and 119910
axis that is Δ119909and Δ
119910(see Figure 2) the coordinates of a
point 119901 equiv 119909119901 119910119901 with respect to to the plate coordinate
4 Journal of Sensors
system can be directly related to 119906 and V by means of (5)taking 119909
119898= 119909119901minus Δ119909and 119910
119898= 119910119901minus Δ119910 In this application
the point 119901 is the impact point
Display Finally the Display phase is meant to show to theexperimenter the AR scene The available devices can bedivided into one of the two main groups depending whetherthey show a computer generated image of the external worldand synthetic environment (HeadMountedDisplay (HMD))or a synchronized combination of real-world eyesight andcomputer-generated image (Optical See-Through devices)HMDs are composed by a dark head helmet equipped with apair of projectors displaying external world images acquiredby a camera mounted on the HMD itself the device isso able to combine a background image streaming comingfrom the camera (external view) and a foreground syntheticimage synchronized with the localized optical markers Onthe other hand see-through displays are usually equippedwith a camera projectors and semitransparent lenses theexperimenter can see through the lenses the real-worldeyesight while the virtual scene represented by the virtualelaboration of the image acquired by the camera is projectedonto the lenses
According to [30] also new devices like mobile platforms(eg Android) can be used for AR in which the augmentedimage is displayed onto the screen of a mobile phone or atablet using the device camera to acquire the external image
3 Impact Detection Methodology
In this section the guided waves based methodology toestimate the impact position 119909
119901 119910119901 the uncertainty in such
estimation 120575cr and impact energy 119864119901is presented
31 Hyperbolic Positioning Hyperbolic positioning alsocalled 119898119906119897119905119894119897119886119905119890119903119886119905119894119900119899 is a powerful method to locate theimpact position (119909
119901 119910119901) in a plate Given the positions of at
least three sensors (119909119894 119910119894) on the plate with 119894 = 1 2 3 such
method exploits the differences in distance of propagation(DDOP) traveled by the waves from the impact point to thesensors Δ
119894119895
Δ12= radic(119909
1minus 119909119901)2
+ (1199101minus 119910119901)2
minus radic(1199092minus 119909119901)2
+ (1199102minus 119910119901)2
Δ13= radic(119909
1minus 119909119901)2
+ (1199101minus 119910119901)2
minus radic(1199093minus 119909119901)2
+ (1199103minus 119910119901)2
Δ23= radic(119909
2minus 119909119901)2
+ (1199102minus 119910119901)2
minus radic(1199093minus 119909119901)2
+ (1199103minus 119910119901)2
(6)
in order to determine hyperbolas on which the impact pointmust lie The intersection of the three different hyperbolasΔ12 Δ13 and Δ
23 obtained by solving the system of equa-
tions with the Levenberg-Marquardt algorithm [31] is takento be the impact position
Generally the difference in distance of propagation(DDOP) is obtained by multiplying the difference in time ofarrival (DTOA) measured from the acquired signals as thefirst arrival over a certain threshold by a nominal wave prop-agation speed Unfortunately the potential of such approachis limited in plates where several dispersive modes that iswith a frequency-dependent velocity and attenuation appearsimultaneously in the received signals and the selection ofa wave speed and thus the transformation from DTOA toDDOP is not trivial
To overcome this detrimental effect it was shown in [19]that processing the acquired signals with a suitable transformnamely the Warped Frequency Transform (WFT) a robustestimation of the DDOP is obtained without the need ofmeasuring the DTOA (some details are given in the nextsubsection)
32 DDOP Estimation viaWarped Frequency Transform Letus consider a guided wave signal 119904(119905 119863) detected passivelyin an isotropic plate where 119905 denotes the time and 119863 isthe unknown traveled distance and assume that the 119860
0
mode is within the signal as generally happen when a plateundergoes to an impact The group velocity curve 119888
119872
119892(119891)
of the 1198600mode can be used to compute a warping map
119908(119891) that defines uniquely a Frequency Warping operatorW119908[32] Such operator applied to a 119904(119905 119863) yields to a so-
calledwarped signal 119904119908(119905 119863) = W
119908119904(119905 119863)whose frequency
transform is defined as
FW119908119904 (119905 119863) = [radic (119891)119878 (119908 (119891) 0)] sdot 119890
minus1198952120587119891119870119863 (7)
being (119891) the first derivative of the warpingmap 119878(119908(119891) 0)the warped frequency spectra of the exciting pulse at thepoint of impact (zero traveled distance) and 119870 a warpingmap normalization parameter The dispersive signal 119904(119905 119863)
is thus transformed as in (7) where the dispersive effect ofthe distance is converted into a simple warped time delay119870119863proportional to the distance itself
If so the cross-correlation in the frequency domain of twowarped signals acquired at sensors 119894 = 1 and 119894 = 2 is
FW119908119904 (119905 119863
1) sdot FWlowast
119908119904 (119905 119863
2)
= (119891) sdot10038161003816100381610038161198780 (119908 (119891) 0)
10038161003816100381610038162
sdot 119890minus1198952120587119891119870(119863
1minus1198632)
(8)
where the DDOP Δ12
= 1198631minus 1198632appears in the phase
term Thus the abscissa value at which the cross-correlationenvelope of two signal peaks in the frequencywarped domaincan be directly related to the DDOP of the dispersive signalacquired passively at two different sensors
33 Theoretical Estimation Error of the Impact PositionThe proposed impact localization strategy has an intrinsic
Journal of Sensors 5
uncertainty due to the imperfect knowledge of the materialproperties of the plate the limited sampling frequency andthe unavoidable presence of noise in the measurements Suchuncertainty is strictly related to the sensor topology and itslower bound that is the minimum theoretical estimationerror of the source positions can be estimated by using theCramer-Rao algorithm
Considering 119898 = 3 DDOP measurements the Cramer-Rao value for a point 119901 equiv 119909
119901 119910119901 on the plate is calculated
as
120575cr (119909119901 119910119901) = [C119879A119879 sdot (A sdot R sdot A119879)minus1
sdot AC]minus1
(9)
C is the119898 times 2matrix whose elements are
1198621198941=
1
119888119908
119909119901minus 119909119894
radic(119909119901minus 119909119894)2
+ (119910119901minus 119910119894)2
1198621198942=
1
119888119908
119910119901minus 119910119894
radic(119909119901minus 119909119894)2
+ (119910119901minus 119910119894)2
(10)
where 119888119908
= 119870 sdot 119891119904is the equivalent wave speed obtained
through the time distance mapping described in the warpingprocedure 119870 is the warping map normalization parameterand 119891
119904is the considered sampling frequency
A is the full-rank (119898 minus 1) times 119898matrix
A = [1 minus1 0
1 0 minus1] (11)
R is a 119898 times 119898 diagonal matrix which represents theerror in the measurements The measurement errors areconsidered as independent identically distributed Gaussianrandom variables with zero mean and standard deviation120590119889= 2119888119908119891119904 so that the nonnull elements of R are equal to
1205902
119889
34 Impact Energy Estimation Because of the acousticenergy confinement in the waveguide Lamb waves expe-rience a low attenuation with distance In particular theacquired signal amplitude is inversely proportional to thesquared root of the distance of propagation The estimationof impact energy deserves attention since it can be related tothe level of damage in the component Since the WFT is aunitary transform which preserves the energy of the signal[19] the impact energy 119864
119901can be estimated from the energy
of the warped signals as
119864119901= 119896119864
3
sum
119894=0
int
119905
0
119904119908119894(119905 119863119894)2d119905 (12)
where 119904119908119894(119905 119863119894) with 119894 isin 1 2 3 are the warped versions
of the signals acquired by the three sensors and 119896119864is a
calibration constant
Table 1 Sensor topology
PZT-1 PZT-2 PZT-3119909119894[mm] 250 250 750
119910119894[mm] 250 750 250
4 Impact Data Visualization in AR
Hardware and software settings and testing procedures usedin this work to visualize the outcomes of the impact detectionmethodology in AR are described in the following
An aluminum 1050A square plate 1000mm times 1000mmand 3mm thick was considered (see Figure 3) The nominalproperties considered for the plate are Youngrsquos modulus 119864 =
69GPa Poissonrsquos coefficient ] = 03 andmaterial density 120588 =
2700 kgm3 Three piezoelectric sensors (PZT discs PIC181diameter 10mm thickness 1mm) were bonded to the platesurface at positions reported in Table 1
In this study a vision-based tracking technique isadopted Such approach is usually preferred to sensor-basedtechniques in internal applications due to its higher precisionand easier hardware implementation To such purpose themarker of Figure 1(b) is fixed on the plate at the 119909 119910 = 0 0
mm coordinates The marker has been simply sketched withgraphical software and printed on a paper sheet Differentmarker shapes could be used provided they are asymmetricblack and white and easily recognizable by the AR softwareThe tracking is performed by means of the AR toolkitan available library for augmented reality shared by theUniversity of Washington [33] The AR toolkit is used todetect the marker to measure the image distortion and torelate in time the marker reference system to the image
The experimenter wears a pair of Vuzix STAR 1200 glasses(see Figure 1(a)) a see-trough device specifically designedfor AR applications [34] These glasses include a camera inthe front and two miniaturized projectors displaying imageson the transparent lenses two USB plugs connect the Vuzixglasses with a notebook or a PCThe resolution of the cameraof this see-through glasses can be changed up to 1920 times
1080 pixels and the two projectors support video displayresolutions up to 1280 times 720 At first an image in which themarker is framed with a preset distance and pose (knownposition) of the Vuzix glasses camera is taken the AR toolkitmacros automatically detect the marker in the image andperforms the Calibration computing 120574 (the other camerafeatures are generally known)
The experimenter strikes the plate with the instrumentedhammer (PCB Piezotronics) used to simulate impacts andthe guided waves are signals gathered by the sensors throughan oscilloscope (LC534 series LeCroy) at a sampling fre-quency of 119891
119904= 300 kHz Acquisitions are triggered when the
signal received from one of the sensors reaches a thresholdlevel of 140mV pretrigger recording is enabled to obtainthe previous history of each signal The detected waveformsare directly processed in a PC to find the position 119909
119901 119910119901
position uncertainty 120575cr and energy 119864119901of the impact Such
data are passed to the AR algorithm for the final visualization
6 Journal of Sensors
PC for impactdetection (positionuncertainty and energy)and image processing(AR toolkit software)
Wuzix glasses
Marker
hammer
MarkerOscilloscope connected via GPIB to the PC
PZT-1
PZT-1PZT-2
PZT-3
Instrumented impact
Y
XO
Figure 3 Experimental setup for impact localization and highlight of PZT-1 placed at 119909 119910 = 250 250mm and the marker placed atcorner 119909 119910 = 0 0mm
(a) (b) (c)
(d) (e) (f)
Figure 4 Image analysis image acquired by Vuzix camera (a) thresholded image (b) connection of pixel to detect objects (c) contoursdetection (d) marker edges detection and pose estimation (e) and impact point detection in AR (f)
During tracking each frame acquired by the glassesrsquocamera is processed by the AR toolkit software followingthese steps application of threshold detection of connectedobjects detection of objects contours detection of markeredges computation of image distance and pose with respectto the camera reference system by the evaluation of the
marker distortion and projection of the impact point coor-dinates 119909
119901 119910119901 on the image in terms of 119906 and V
Finally a designed virtual symbol or image centered inthe right position (119906 and V) can be projected to the realworld image in real time (see Figure 4) exploiting the glassesprojectors
Journal of Sensors 7y
(m)
x (m)
6070
4060
50 60 70
3040
405060
70
304060 50
506070
40507080
506070
30
30 3030
30
30
20
20
20
20
20
2020
40
40
4040
10
10
10
10
50
6040
60
PZT-1
PZT-2
PZT-3
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
80
80
80
5070
80
80
8080
Figure 5 Cramer-Rao lower bound expressed in [mm]
Themarker detection procedure does not require that theexperimentersrsquo point of view is perpendicular to the surfaceon which the marker lies so that the experimenter can viewthe impact point from several points of view rotating the headin a natural way
5 Results of the Case Study
51 Impact Location Estimation To process the acquiredsignals with the WFT first a guided mode must be selectedand its warpingmap119908(119891) is designed Here the fundamentalmode 119860
0was selected since the contribution of 119860
0in the
signal is expected to be much more relevant than the oneof 1198780for two main reasons (i) the wavelength tuning effect
imposed by the sensorsplate properties filters out most ofthe 1198780wave (ii) due to the out-of-plane excitation the energy
in the 1198600mode is considerably greater than that retained
by the 1198780mode Therefore the group velocity curve of the
1198600mode was predicted [35] used to compute the warping
map 119908(119891) and the normalization parameter 119870 as well as theproper Frequency Warping operator W
119908 At this point for
the given coordinates of the transducers 119909119894 119910119894 the selected
sampling frequency119891119904 and the parameter119870 theCramer-Rao
lower bound was computed for each point of the plate andrepresented in Figure 5 as a contour plot
Then the plate was impacted the signals acquired andthe cross-correlation (Xcorr) of thewarped signals computedFor instance the Xcorr between 119904
1199081(119905 1198631) and 119904
1199082(119905 1198632) for
an impact 119909119901
= 395mm and 119910119901
= 554mm is depictedin Figure 6(a) together with its envelope computed as themodulus of the Hilbert Transform Similarly in Figure 6(b)is shown the Xcorr and its envelope for 119904
1199081(119905 1198631) and
1199041199083(119905 1198633)
As can be seen the abscissas of envelope maxima corre-spond to the actual difference in distance of propagation Δ
12
and Δ13 respectively Similar accuracy was obtained for Δ
23
not shown in Figure 6 Such DDOP define the hyperbolasused to estimate the impact position
Such approach was used next to locate 18 impacts onthe plate surface The results of the proposed procedure canbe seen in Figure 7 where the crosses denote the positionswhere the plate has been impacted the centre of the circlesthe impact positions estimated by the proposed procedureand whereas the circlesrsquo radii were set equal to the valueof 120575cr(119909119901 119910119901) for the estimated impact position It is worthnoting how the circles always surround the true impactpositions
52 Impact Energy Estimation The impact energy 119864119901for
the 18 different impacts considered was estimated as detailedin Section 34 and represented in Figure 8 as small circlesSuch estimated impact energies were compared with thosemeasured by the instrumented hammer 119864
ℎ In particular
119864ℎwas computed as the squared value of the velocity time-
history obtained by integrating the acceleration time-historyregistered by the instrumented hammer As can be seen avery good agreement between the two quantities was foundthus verifying that an efficient impact energy estimation canbe performed from warped waveforms 119904
119908119894 The discrepancy
in the energy estimation that appears in cases 10 and 14 maybe due to several factors such as the suboptimal selectionof the calibration constant 119896
119864 or the jamming effect due
to edge reflections Most likely the discrepancy is due tothe difference in the frequency response between the impacthammer (which acts as low pass filter in the 0ndash4 kHz range)and the piezoelectric sensors (which have a much broaderfrequency response)
53 AR Visualization Following the descried AR approachthe experimenter wears a pair of AR glasses and frames boththe marker and the zone in which the impact is applied Thealuminum panel is hit with the hammer the impact detectionprocedure starts and the estimated coordinates of the impactpoint with respect to the marker system 119909
119898= 119909119901minus Δ119909and
119910119898= 119910119901minusΔ119910are passed to the visualization algorithm along
with the 120575cr and 119864119901As shown in Figure 9 a symbol formed by three squares
has been designed to represent the data obtained from theimpact methodology the centre of the red square showsthe estimated impact position 119909
119901 119910119901 the side length of
the green square denotes the uncertainty in the estimatedposition 120575cr(119909119901 119910119901) whereas the yellow square denotes thestrength of the impact a yellow square close to the red squaremeans low energy 119864
119901asymp 0 while a yellow square close to the
green square means high energy 119864119901asymp 1 The experimenter
can thus visually evaluate the energy at the impact in anintuitive way Figure 9 shows the view through the glasseslenses after the augmentation
8 Journal of Sensors
Difference in distance of propagation (DDOP) (m)
Envelope
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
XcorrActual Δ12
sw1 and sw2
(a)
Difference in distance of propagation (DDOP) (m)
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
Envelope
XcorrActual Δ13
sw1 and sw3
(b)
Figure 6 Cross-correlated warped signals and their envelope obtained as the modulus of the Hilbert Transform for an impact at position119909119901= 395mm and 119910
119901= 554mm
03 04 05 06 07 0802
025
03
035
04
045
05
055
06
065
07
31 2
5
11 12
9
14 15
17 18
6 7 8
4
10
16
13
x (m)
y(m
)
Figure 7 Localization results for the 18 impacts denoted by thesmall numbers crosses denote the true impact positions the centreof the circles the estimated impact positions 119909
119901 119910119901 and the radii
of the circles is taken equal to 120575cr(119909119901 119910119901)
6 Conclusions
In this work an augmented reality (AR) strategy is proposedto visualize on plate-like structures the outcomes of an impactdetectionmethodology In particular the impact position andenergy are considered To such aim first previous contribu-tions of the authors devoted to signal processing strategiesfor impact localization are exploited and extended to theestimation of the impact energy The experimental resultson an isotropic plate show the accuracy of the methodologyon both impact location and energy estimation Next as anew original contribution to the research the visualization inaugmented reality (AR) of impact position uncertainty andimpact energy is provided The experimental results show
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
08
09
1
Impact number
Nor
mal
ized
ener
gy (a
u)
EhammerEwarped signals
Figure 8 Energy estimation results for the 18 impacts considered
Figure 9 Image on the Vuzix glasses the impact indicator issuperimposed to the external real-world image
how such data can be viewed by the experimenter in real-timedirectly overimposed on the structure
The proposed strategy shows good potential to be used indamage detection andmaintenance operations In fact beside
Journal of Sensors 9
the precise and low computational cost for impact detection(position and energy) it can ease the maintenance practicesince data can be presented directly on the component tomonitor in an effective and intuitive wayThe AR is preferredto the Virtual Reality since the augmented scene is obtainedby adding virtual objects to the real-world eyesight mitigat-ing thus the unphysical feeling that the end-user experiencefrom a complete virtual approach while still supporting himduring the operations in the real-world environment
Further studies are needed to assess the reliability of theproposed technology and the applicability to more complexstructures (eg stiffened plates) and to anisotropic materials
Conflict of Interests
The authors did not receive any financial support from thecommercial identities mentioned in the work The authorsdeclare that there is no conflict of interests regarding thepublication of this paper
References
[1] httpsenwikipediaorgwikiaugmented reality[2] R T Azuma ldquoA survey of augmented realityrdquo Presence vol 6
no 4 pp 355ndash385 1997[3] R Azuma Y Baillot R Behringer S Feiner S Julier and
B MacIntyre ldquoRecent advances in augmented realityrdquo IEEEComputer Graphics and Applications vol 21 no 6 pp 34ndash472001
[4] D Krevelen and R Poleman ldquoA survey of augmented realitytechnologies applications and limitationsrdquo The InternationalJournal of Virtual Reality vol 9 no 2 pp 1ndash20 2010
[5] X Wang M J Kim P E Love and S C Kang ldquoAugmentedreality in built environment classification and implications forfuture researchrdquo Automation in Construction vol 32 pp 1ndash132013
[6] H L Chi S C Kang and X Wang ldquoResearch trends andopportunities of augmented reality applications in architectureengineering and constructionrdquo Automation in Constructionvol 33 pp 116ndash122 2013
[7] S Benbelkacem M Belhocine A Bellarbi N Zenati-Hendaand M Tadjine ldquoAugmented reality for photovoltaic pumpingsystemsmaintenance tasksrdquoRenewable Energy vol 55 pp 428ndash437 2013
[8] J M Antonio S R J Luis and S P Faustino ldquoAugmented andvirtual reality techniques for footwearrdquo Computers in Industry2013
[9] A Farhidzadeh E Dehghan-Niri A Moustafa S Salamoneand A Whittaker ldquoDamage assessment of reinforced concretestructures using fractal analysis of residual crack patternsrdquoExperimental Mechanics pp 1ndash13 2012
[10] B Koo H Choi and T Shon ldquoWiva Wsn monitoringframework based on 3D visualization and augmented realityin mobile devicesrdquo in Ambient Assistive Health and WellnessManagement in the Heart of the City M Mokhtari I KhalilJ Bauchet D Zhang and C Nugent Eds vol 5597 ofLecture Notes in Computer Science pp 158ndash165 Springer BerlinGermany 2009
[11] J L Rose Ultrasonic Waves in Solid Media Cambridge Univer-sity Press 1999
[12] R Seydel and F-K Chang ldquoImpact identification of stiffenedcomposite panels I System developmentrdquo Smart Materials andStructures vol 10 no 2 pp 354ndash369 2001
[13] B Wang J Takatsubo Y Akimune and H Tsuda ldquoDevel-opment of a remote impact damage identification systemrdquoStructural Control and Health Monitoring vol 12 no 3-4 pp301ndash314 2005
[14] Z Su L Ye and Y Lu ldquoGuided Lamb waves for identificationof damage in composite structures a reviewrdquo Journal of Soundand Vibration vol 295 no 3ndash5 pp 753ndash780 2006
[15] T Kundu S Das and K V Jata ldquoPoint of impact predictionin isotropic and anisotropic plates from the acoustic emissiondatardquo Journal of the Acoustical Society of America vol 122 no4 pp 2057ndash2066 2007
[16] T Kundu S Das and K V Jata ldquoDetection of the point ofimpact on a stiffened plate by the acoustic emission techniquerdquoSmartMaterials and Structures vol 18 no 3 Article ID 0350062009
[17] F Ciampa and M Meo ldquoAcoustic emission source localizationand velocity determination of the fundamental mode A
0using
wavelet analysis and a newton-based optimization techniquerdquoSmart Materials and Structures vol 19 no 4 Article ID 0450272010
[18] S Salamone I Bartoli P di Leo et al ldquoHigh-velocity impactlocation on aircraft panels using macro-fiber composite piezo-electric rosettesrdquo Journal of Intelligent Material Systems andStructures vol 21 no 9 pp 887ndash896 2010
[19] A Perelli L de Marchi A Marzani and N Speciale ldquoAcousticemission localization in plates with dispersion and reverber-ations using sparse PZT sensors in passive moderdquo SmartMaterials and Structures vol 21 no 2 Article ID 025010 2012
[20] E D Niri A Farhidzadeh and S Salamone ldquoNonlinear kalmanfiltering for acoustic emission source localization in anisotropicpanelsrdquo Ultrasonics 2013
[21] A Liverani and A Ceruti ldquoInteractive GT code managementfor mechanical part similarity search and cost predictionrdquoComputer-Aided Design and Applications vol 7 no 1 pp 1ndash152010
[22] A Liverani A Ceruti and G Caligiana ldquoTablet-based 3Dsketching and curve reverse modellingrdquo International Journalof Computer Aided Engineering and Technology vol 5 no 2-32013
[23] S Debernardis M Fiorentino M Gattullo G Monno and AE Uva ldquoText readability in head-worn displays color and styleoptimization in video vs optical see-through devicesrdquo IEEETransactions on Visualization and Computer Graphics vol PPno 99 p 1 2013
[24] F Zhou H B-L Dun and M Billinghurst ldquoTrends in aug-mented reality tracking interaction and display a review of tenyears of ISMARrdquo in Proceedings of the 7th IEEE InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo08) pp193ndash202 Cambridge UK September 2008
[25] GWelch and E Foxlin ldquoMotion tracking no silver bullet but arespectable arsenalrdquo IEEE Computer Graphics and Applicationsvol 22 no 6 pp 24ndash38 2002
[26] M Pressigout and E Marchand ldquoHybrid tracking algorithmsfor planar and non-planar structures subject to illuminationchangesrdquo in Proceedings of the 5th IEEE and ACM InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo06)pp 52ndash55 IEEE Computer Society Santa Barbara Calif USAOctober 2006
10 Journal of Sensors
[27] P P Valentini and E Pezzuti ldquoInteractive multibody simula-tion in augmented realityrdquo Journal of Theoretical and AppliedMechanics vol 48 no 3 pp 733ndash750 2010
[28] A David and P Jean Computer Vision A Modern Approach2002
[29] HWu Z Cai and YWang ldquoVision-based auxiliary navigationmethod using augmented reality for unmanned aerial vehiclesrdquoin Proceedings of the 10th IEEE International Conference onIndustrial Informatics (INDIN rsquo12) pp 520ndash525 Beijing ChinaJuly 2012
[30] S Yuen G Yaoyuneyong and E Johnson ldquoAugmented realityan overview and five directions for ar in educationrdquo Journal ofEducational Technology Development and Exchange vol 4 no1 pp 2119ndash2140 2011
[31] D Marquardt ldquoAn algorithm for least-squares estimation ofnonlinear parametersrdquo Journal of the Society For Industrial andApplied Mathematics vol 11 no 2 pp 431ndash441 1963
[32] S Caporale L de Marchi and N Speciale ldquoFrequency warpingbiorthogonal framesrdquo IEEE Transactions on Signal Processingvol 59 no 6 pp 2575ndash2584 2011
[33] httpwwwhitlwashingtoneduartoolkit[34] httpwwwvuzixcomaugmented-realityproducts star1200
html[35] P Bocchini A Marzani and E Viola ldquoGraphical user interface
for guided acoustic wavesrdquo Journal of Computing in CivilEngineering vol 25 no 3 pp 202ndash210 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Journal of Sensors
the ultrasonic inspection generally a flawholedamage over-imposed to the structure under testing This would supportthe inspector in the inspectiondiagnosis and maintenanceprocess through
(i) facilitating the understanding of the results of theinspection
(ii) providing an immediate real size dimension of thedamage compared to that of the structure
(iii) avoiding delay and possible mistakes while transfer-ring the inspection results to the structure
In this paper an AR approach is proposed to visualizethe outcomes of a nondestructive Lamb waves based impactdetection methodology directly on plate-like structures Forthe sake of validating the proposed approach the plate isimpacted through the stroke of an instrumented hammerby the experimenter in known positions and the AR visu-alization is performed in real time In a realistic industrialscenario such AR approach could be exploited during themaintenance phase after the impact has taken place drivingthe operator on the impact position to check if the componenthas been damaged or not and supporting the final decisionwhether maintenance actions are required
Impact detection in plate-like structures via guided waveshas been the focus of many researches over the last years[11ndash20] Generally a network of piezoelectric sensors is usedto detect in passive mode the Lamb waves produced inthe plate by the impact The information gathered by thesensors is sent to a central unit where the acquired responsesare processed to estimate the position of the impact andeventually its energy
Thanks to the low weight and low power consumptionof the technology such approaches can be proficiently usedin SHM of plate-like structures In practice whenever animpact occurs the SHM system activate an alert Once thealert is detected an operator should retrieve the acquiredinformation and take a decision about the maintenancestrategy In particular the operator has to carefully verifywhether the impact has damaged or not the monitoredstructure This is particularly important for composite plate-like structures since the impact effects may generate damageinvisible or barely visible at human eyes complicating thusthe maintenance operator tasks Therefore the effectivenessof methods and tools such as AR aimed at improving thedamage detectability should be investigated
In such direction this paper proposes a first attempton the use of AR for post-impact data visualization on thestructure In particular from the acquired waveforms theimplemented tool provides to the inspector the estimatedimpact position a measure of the uncertainty in the localiza-tion and an estimation of the impact energy To the authorsrsquoopinion both pieces of information could avoid false alarmsof the SHM system and prevent false assumptions duringthe inspection phase A case study is proposed to show themethodology and its final outcome
The work is organized as follows Basic information onAR is provided in Section 2 The proposed algorithm forimpact localization including uncertainty and impact energy
estimation is presented in Section 3 In Section 4 the ARenvironment and tools are presented and an experimentalvalidation is proposed through a case study in Section 5 Theconclusions end the paper
2 Augmented Reality
Augmented reality (AR) is a real-time technique [21 22]allowing the experimenter to see virtual objects or scenariosuperimposed on real-world images interactively [2 3 23]Image acquisition Calibration Tracking Registration andDisplay are the main process steps required for AR [24] Abrief description of each step is provided in the following
Image Acquisition The Image acquisition is usually obtainedthrough a camera embedded in a device generally carried onthe experimenterrsquos head as the one represented in Figure 1(a)
Calibration The Calibration step is required to measureprecisely the internal camera parameters and to evaluate andcorrect image distortion This operation must be performedonly once since it depends on the camera features only
Tracking Tracking is required to evaluate the pose (ieorientation in space in terms of pitch roll and yaw angles)and position of the camera with respect to an external ref-erence system several techniques can be applied dependingon the need of the final application but all these methodscan be grouped in sensor-based and vision-based track-ing techniques Sensor-based tracking techniques requireGPSaccelerometers magnetometers acoustical and opticalor mechanical devices to detect the pose and position ofthe experimenter [25] Vision-based tracking techniques arebased upon the evaluation of the size and optical deformationof a geometrical marker to estimate the relative positionbetween the marker and the camera reference system [26]
Registration The Registration is the procedure applied tosynchronize the virtual image or scenario with the externalview (real-word image) accordingly with the userrsquos headmovements [27] It uses the information gathered by Calibra-tion and Tacking phases and exploits the spatial coordinatestransformation from the 3D scene to a 2D image
For this purpose first the simple pinhole camera model(see Figure 2 and [28]) based on a perspective projectionis used to describe the relationship between the coordinatesof the generic point 119876 equiv 119909
119888 119910119888 119911119888 in the 3D space and
its projection onto the 2D screen plane 119902 equiv 119909119904 119910119904 Simple
geometry shows that if the distance of the screen plane tothe centre of projection 119874
119888 that is the ideal pinhole of the
camera is denoted by 119891 the screen coordinates are related tothe object coordinates as
[119909119904
119910119904
] =119891
119911119888
[119909119888
119910119888
] (1)
Next each point 119902 on the screen plane can be related toa pixel of an image if the dimensions of the screen plane are
Journal of Sensors 3
(a)
80mm
80m
m
(b)
Figure 1 (a) Vuzix STAR 1200 glasses and (b) Marker features
Principal planeScreen plane
Optical axisxs
ys
0s0c
q
xc
yc
zmym xm xy
OΔy Δx
Q
Zc equiv Zs
PZT-iPlate
Camera
f
Figure 2 Plate 119909 119910 Marker 119909119898 119910119898 119911119898 Camera 119909
119888 119910119888 119911119888 and
Screen 119909119904 119910119904 119911119904 coordinate systems
known Denoting by 119906 and V the row and column of the pixelwith respect to 119906
0and V
0 the row and column of the pixel
in the origin of the screen plane coordinate system (119874119904) and
being 119878119909and 119878119910scale factors in 119909
119904and 119910
119904axis (pixelmeter)
respectively such relation is
[119906
V] = [
119878119909
0 1199060
0 119878119910
V0
][
[
119909119904
119910119904
1
]
]
(2)
Combining (1) and (2) and exploiting homogeneous coor-dinates (4-dimensional) a transformation between pixels andcoordinates in the 3D space can be obtained as
[[[
[
119911119888119906
119911119888V
119911119888
1
]]]
]
=[[[
[
119878119909119891 120574 119906
00
0 119878119910119891 V0
0
0 0 1 0
0 0 0 1
]]]
]
[[[
[
119909119888
119910119888
119911119888
1
]]]
]
= P[[[
[
119909119888
119910119888
119911119888
1
]]]
]
(3)
in which the parameter 120574 related to the camera features isintroduced to account for the distortion effects between theaxis 119906 and V [29] The parameters of the matrix P known
as camerarsquos perspective matrix are obtained by means of theCalibration process
Subsequently the relative position in the 3D spacebetween the marker and the camera coordinate systems isintroduced
[[[
[
119909119888
119910119888
119911119888
1
]]]
]
=[[[
[
11987711
11987712
11987713
119879119909
11987721
11987722
11987723
119879119910
11987731
11987732
11987733
119879119911
0 0 0 1
]]]
]
[[[
[
119909119898
119910119898
119911119898
1
]]]
]
= [R T
01times3
1][[[
[
119909119898
119910119898
119911119898
1
]]]
]
= M[[[
[
119909119898
119910119898
119911119898
1
]]]
]
(4)
where the 3 times 3 Rotation matrix (R) and a 3 times 1 Translationvector (T) computed in real time by the Tracking phasedescribe the pose and position of the camera with respect tothe marker reference system The matrixM is also known asthe external parameters matrix Finally substituting (4) into(3) yields a dynamic relation between each point described in3D marker coordinate system and its representation on a 2Dvirtual image
[[[
[
119911119888119906
119911119888V
119911119888
1
]]]
]
=[[[
[
119878119909119891 119896 119906
00
0 119878119910119891 V0
0
0 0 1 0
0 0 0 1
]]]
]
[[[
[
11987711
11987712
11987713
119879119909
11987721
11987722
11987723
119879119910
11987731
11987732
11987733
119879119911
0 0 0 1
]]]
]
[[[
[
119909119898
119909119898
119911119898
1
]]]
]
= PM[[[
[
119909119898
119910119898
119911119898
1
]]]
]
(5)
Since the marker and the plate reference systems areparallel and shifted of known quantities along the 119909 and 119910
axis that is Δ119909and Δ
119910(see Figure 2) the coordinates of a
point 119901 equiv 119909119901 119910119901 with respect to to the plate coordinate
4 Journal of Sensors
system can be directly related to 119906 and V by means of (5)taking 119909
119898= 119909119901minus Δ119909and 119910
119898= 119910119901minus Δ119910 In this application
the point 119901 is the impact point
Display Finally the Display phase is meant to show to theexperimenter the AR scene The available devices can bedivided into one of the two main groups depending whetherthey show a computer generated image of the external worldand synthetic environment (HeadMountedDisplay (HMD))or a synchronized combination of real-world eyesight andcomputer-generated image (Optical See-Through devices)HMDs are composed by a dark head helmet equipped with apair of projectors displaying external world images acquiredby a camera mounted on the HMD itself the device isso able to combine a background image streaming comingfrom the camera (external view) and a foreground syntheticimage synchronized with the localized optical markers Onthe other hand see-through displays are usually equippedwith a camera projectors and semitransparent lenses theexperimenter can see through the lenses the real-worldeyesight while the virtual scene represented by the virtualelaboration of the image acquired by the camera is projectedonto the lenses
According to [30] also new devices like mobile platforms(eg Android) can be used for AR in which the augmentedimage is displayed onto the screen of a mobile phone or atablet using the device camera to acquire the external image
3 Impact Detection Methodology
In this section the guided waves based methodology toestimate the impact position 119909
119901 119910119901 the uncertainty in such
estimation 120575cr and impact energy 119864119901is presented
31 Hyperbolic Positioning Hyperbolic positioning alsocalled 119898119906119897119905119894119897119886119905119890119903119886119905119894119900119899 is a powerful method to locate theimpact position (119909
119901 119910119901) in a plate Given the positions of at
least three sensors (119909119894 119910119894) on the plate with 119894 = 1 2 3 such
method exploits the differences in distance of propagation(DDOP) traveled by the waves from the impact point to thesensors Δ
119894119895
Δ12= radic(119909
1minus 119909119901)2
+ (1199101minus 119910119901)2
minus radic(1199092minus 119909119901)2
+ (1199102minus 119910119901)2
Δ13= radic(119909
1minus 119909119901)2
+ (1199101minus 119910119901)2
minus radic(1199093minus 119909119901)2
+ (1199103minus 119910119901)2
Δ23= radic(119909
2minus 119909119901)2
+ (1199102minus 119910119901)2
minus radic(1199093minus 119909119901)2
+ (1199103minus 119910119901)2
(6)
in order to determine hyperbolas on which the impact pointmust lie The intersection of the three different hyperbolasΔ12 Δ13 and Δ
23 obtained by solving the system of equa-
tions with the Levenberg-Marquardt algorithm [31] is takento be the impact position
Generally the difference in distance of propagation(DDOP) is obtained by multiplying the difference in time ofarrival (DTOA) measured from the acquired signals as thefirst arrival over a certain threshold by a nominal wave prop-agation speed Unfortunately the potential of such approachis limited in plates where several dispersive modes that iswith a frequency-dependent velocity and attenuation appearsimultaneously in the received signals and the selection ofa wave speed and thus the transformation from DTOA toDDOP is not trivial
To overcome this detrimental effect it was shown in [19]that processing the acquired signals with a suitable transformnamely the Warped Frequency Transform (WFT) a robustestimation of the DDOP is obtained without the need ofmeasuring the DTOA (some details are given in the nextsubsection)
32 DDOP Estimation viaWarped Frequency Transform Letus consider a guided wave signal 119904(119905 119863) detected passivelyin an isotropic plate where 119905 denotes the time and 119863 isthe unknown traveled distance and assume that the 119860
0
mode is within the signal as generally happen when a plateundergoes to an impact The group velocity curve 119888
119872
119892(119891)
of the 1198600mode can be used to compute a warping map
119908(119891) that defines uniquely a Frequency Warping operatorW119908[32] Such operator applied to a 119904(119905 119863) yields to a so-
calledwarped signal 119904119908(119905 119863) = W
119908119904(119905 119863)whose frequency
transform is defined as
FW119908119904 (119905 119863) = [radic (119891)119878 (119908 (119891) 0)] sdot 119890
minus1198952120587119891119870119863 (7)
being (119891) the first derivative of the warpingmap 119878(119908(119891) 0)the warped frequency spectra of the exciting pulse at thepoint of impact (zero traveled distance) and 119870 a warpingmap normalization parameter The dispersive signal 119904(119905 119863)
is thus transformed as in (7) where the dispersive effect ofthe distance is converted into a simple warped time delay119870119863proportional to the distance itself
If so the cross-correlation in the frequency domain of twowarped signals acquired at sensors 119894 = 1 and 119894 = 2 is
FW119908119904 (119905 119863
1) sdot FWlowast
119908119904 (119905 119863
2)
= (119891) sdot10038161003816100381610038161198780 (119908 (119891) 0)
10038161003816100381610038162
sdot 119890minus1198952120587119891119870(119863
1minus1198632)
(8)
where the DDOP Δ12
= 1198631minus 1198632appears in the phase
term Thus the abscissa value at which the cross-correlationenvelope of two signal peaks in the frequencywarped domaincan be directly related to the DDOP of the dispersive signalacquired passively at two different sensors
33 Theoretical Estimation Error of the Impact PositionThe proposed impact localization strategy has an intrinsic
Journal of Sensors 5
uncertainty due to the imperfect knowledge of the materialproperties of the plate the limited sampling frequency andthe unavoidable presence of noise in the measurements Suchuncertainty is strictly related to the sensor topology and itslower bound that is the minimum theoretical estimationerror of the source positions can be estimated by using theCramer-Rao algorithm
Considering 119898 = 3 DDOP measurements the Cramer-Rao value for a point 119901 equiv 119909
119901 119910119901 on the plate is calculated
as
120575cr (119909119901 119910119901) = [C119879A119879 sdot (A sdot R sdot A119879)minus1
sdot AC]minus1
(9)
C is the119898 times 2matrix whose elements are
1198621198941=
1
119888119908
119909119901minus 119909119894
radic(119909119901minus 119909119894)2
+ (119910119901minus 119910119894)2
1198621198942=
1
119888119908
119910119901minus 119910119894
radic(119909119901minus 119909119894)2
+ (119910119901minus 119910119894)2
(10)
where 119888119908
= 119870 sdot 119891119904is the equivalent wave speed obtained
through the time distance mapping described in the warpingprocedure 119870 is the warping map normalization parameterand 119891
119904is the considered sampling frequency
A is the full-rank (119898 minus 1) times 119898matrix
A = [1 minus1 0
1 0 minus1] (11)
R is a 119898 times 119898 diagonal matrix which represents theerror in the measurements The measurement errors areconsidered as independent identically distributed Gaussianrandom variables with zero mean and standard deviation120590119889= 2119888119908119891119904 so that the nonnull elements of R are equal to
1205902
119889
34 Impact Energy Estimation Because of the acousticenergy confinement in the waveguide Lamb waves expe-rience a low attenuation with distance In particular theacquired signal amplitude is inversely proportional to thesquared root of the distance of propagation The estimationof impact energy deserves attention since it can be related tothe level of damage in the component Since the WFT is aunitary transform which preserves the energy of the signal[19] the impact energy 119864
119901can be estimated from the energy
of the warped signals as
119864119901= 119896119864
3
sum
119894=0
int
119905
0
119904119908119894(119905 119863119894)2d119905 (12)
where 119904119908119894(119905 119863119894) with 119894 isin 1 2 3 are the warped versions
of the signals acquired by the three sensors and 119896119864is a
calibration constant
Table 1 Sensor topology
PZT-1 PZT-2 PZT-3119909119894[mm] 250 250 750
119910119894[mm] 250 750 250
4 Impact Data Visualization in AR
Hardware and software settings and testing procedures usedin this work to visualize the outcomes of the impact detectionmethodology in AR are described in the following
An aluminum 1050A square plate 1000mm times 1000mmand 3mm thick was considered (see Figure 3) The nominalproperties considered for the plate are Youngrsquos modulus 119864 =
69GPa Poissonrsquos coefficient ] = 03 andmaterial density 120588 =
2700 kgm3 Three piezoelectric sensors (PZT discs PIC181diameter 10mm thickness 1mm) were bonded to the platesurface at positions reported in Table 1
In this study a vision-based tracking technique isadopted Such approach is usually preferred to sensor-basedtechniques in internal applications due to its higher precisionand easier hardware implementation To such purpose themarker of Figure 1(b) is fixed on the plate at the 119909 119910 = 0 0
mm coordinates The marker has been simply sketched withgraphical software and printed on a paper sheet Differentmarker shapes could be used provided they are asymmetricblack and white and easily recognizable by the AR softwareThe tracking is performed by means of the AR toolkitan available library for augmented reality shared by theUniversity of Washington [33] The AR toolkit is used todetect the marker to measure the image distortion and torelate in time the marker reference system to the image
The experimenter wears a pair of Vuzix STAR 1200 glasses(see Figure 1(a)) a see-trough device specifically designedfor AR applications [34] These glasses include a camera inthe front and two miniaturized projectors displaying imageson the transparent lenses two USB plugs connect the Vuzixglasses with a notebook or a PCThe resolution of the cameraof this see-through glasses can be changed up to 1920 times
1080 pixels and the two projectors support video displayresolutions up to 1280 times 720 At first an image in which themarker is framed with a preset distance and pose (knownposition) of the Vuzix glasses camera is taken the AR toolkitmacros automatically detect the marker in the image andperforms the Calibration computing 120574 (the other camerafeatures are generally known)
The experimenter strikes the plate with the instrumentedhammer (PCB Piezotronics) used to simulate impacts andthe guided waves are signals gathered by the sensors throughan oscilloscope (LC534 series LeCroy) at a sampling fre-quency of 119891
119904= 300 kHz Acquisitions are triggered when the
signal received from one of the sensors reaches a thresholdlevel of 140mV pretrigger recording is enabled to obtainthe previous history of each signal The detected waveformsare directly processed in a PC to find the position 119909
119901 119910119901
position uncertainty 120575cr and energy 119864119901of the impact Such
data are passed to the AR algorithm for the final visualization
6 Journal of Sensors
PC for impactdetection (positionuncertainty and energy)and image processing(AR toolkit software)
Wuzix glasses
Marker
hammer
MarkerOscilloscope connected via GPIB to the PC
PZT-1
PZT-1PZT-2
PZT-3
Instrumented impact
Y
XO
Figure 3 Experimental setup for impact localization and highlight of PZT-1 placed at 119909 119910 = 250 250mm and the marker placed atcorner 119909 119910 = 0 0mm
(a) (b) (c)
(d) (e) (f)
Figure 4 Image analysis image acquired by Vuzix camera (a) thresholded image (b) connection of pixel to detect objects (c) contoursdetection (d) marker edges detection and pose estimation (e) and impact point detection in AR (f)
During tracking each frame acquired by the glassesrsquocamera is processed by the AR toolkit software followingthese steps application of threshold detection of connectedobjects detection of objects contours detection of markeredges computation of image distance and pose with respectto the camera reference system by the evaluation of the
marker distortion and projection of the impact point coor-dinates 119909
119901 119910119901 on the image in terms of 119906 and V
Finally a designed virtual symbol or image centered inthe right position (119906 and V) can be projected to the realworld image in real time (see Figure 4) exploiting the glassesprojectors
Journal of Sensors 7y
(m)
x (m)
6070
4060
50 60 70
3040
405060
70
304060 50
506070
40507080
506070
30
30 3030
30
30
20
20
20
20
20
2020
40
40
4040
10
10
10
10
50
6040
60
PZT-1
PZT-2
PZT-3
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
80
80
80
5070
80
80
8080
Figure 5 Cramer-Rao lower bound expressed in [mm]
Themarker detection procedure does not require that theexperimentersrsquo point of view is perpendicular to the surfaceon which the marker lies so that the experimenter can viewthe impact point from several points of view rotating the headin a natural way
5 Results of the Case Study
51 Impact Location Estimation To process the acquiredsignals with the WFT first a guided mode must be selectedand its warpingmap119908(119891) is designed Here the fundamentalmode 119860
0was selected since the contribution of 119860
0in the
signal is expected to be much more relevant than the oneof 1198780for two main reasons (i) the wavelength tuning effect
imposed by the sensorsplate properties filters out most ofthe 1198780wave (ii) due to the out-of-plane excitation the energy
in the 1198600mode is considerably greater than that retained
by the 1198780mode Therefore the group velocity curve of the
1198600mode was predicted [35] used to compute the warping
map 119908(119891) and the normalization parameter 119870 as well as theproper Frequency Warping operator W
119908 At this point for
the given coordinates of the transducers 119909119894 119910119894 the selected
sampling frequency119891119904 and the parameter119870 theCramer-Rao
lower bound was computed for each point of the plate andrepresented in Figure 5 as a contour plot
Then the plate was impacted the signals acquired andthe cross-correlation (Xcorr) of thewarped signals computedFor instance the Xcorr between 119904
1199081(119905 1198631) and 119904
1199082(119905 1198632) for
an impact 119909119901
= 395mm and 119910119901
= 554mm is depictedin Figure 6(a) together with its envelope computed as themodulus of the Hilbert Transform Similarly in Figure 6(b)is shown the Xcorr and its envelope for 119904
1199081(119905 1198631) and
1199041199083(119905 1198633)
As can be seen the abscissas of envelope maxima corre-spond to the actual difference in distance of propagation Δ
12
and Δ13 respectively Similar accuracy was obtained for Δ
23
not shown in Figure 6 Such DDOP define the hyperbolasused to estimate the impact position
Such approach was used next to locate 18 impacts onthe plate surface The results of the proposed procedure canbe seen in Figure 7 where the crosses denote the positionswhere the plate has been impacted the centre of the circlesthe impact positions estimated by the proposed procedureand whereas the circlesrsquo radii were set equal to the valueof 120575cr(119909119901 119910119901) for the estimated impact position It is worthnoting how the circles always surround the true impactpositions
52 Impact Energy Estimation The impact energy 119864119901for
the 18 different impacts considered was estimated as detailedin Section 34 and represented in Figure 8 as small circlesSuch estimated impact energies were compared with thosemeasured by the instrumented hammer 119864
ℎ In particular
119864ℎwas computed as the squared value of the velocity time-
history obtained by integrating the acceleration time-historyregistered by the instrumented hammer As can be seen avery good agreement between the two quantities was foundthus verifying that an efficient impact energy estimation canbe performed from warped waveforms 119904
119908119894 The discrepancy
in the energy estimation that appears in cases 10 and 14 maybe due to several factors such as the suboptimal selectionof the calibration constant 119896
119864 or the jamming effect due
to edge reflections Most likely the discrepancy is due tothe difference in the frequency response between the impacthammer (which acts as low pass filter in the 0ndash4 kHz range)and the piezoelectric sensors (which have a much broaderfrequency response)
53 AR Visualization Following the descried AR approachthe experimenter wears a pair of AR glasses and frames boththe marker and the zone in which the impact is applied Thealuminum panel is hit with the hammer the impact detectionprocedure starts and the estimated coordinates of the impactpoint with respect to the marker system 119909
119898= 119909119901minus Δ119909and
119910119898= 119910119901minusΔ119910are passed to the visualization algorithm along
with the 120575cr and 119864119901As shown in Figure 9 a symbol formed by three squares
has been designed to represent the data obtained from theimpact methodology the centre of the red square showsthe estimated impact position 119909
119901 119910119901 the side length of
the green square denotes the uncertainty in the estimatedposition 120575cr(119909119901 119910119901) whereas the yellow square denotes thestrength of the impact a yellow square close to the red squaremeans low energy 119864
119901asymp 0 while a yellow square close to the
green square means high energy 119864119901asymp 1 The experimenter
can thus visually evaluate the energy at the impact in anintuitive way Figure 9 shows the view through the glasseslenses after the augmentation
8 Journal of Sensors
Difference in distance of propagation (DDOP) (m)
Envelope
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
XcorrActual Δ12
sw1 and sw2
(a)
Difference in distance of propagation (DDOP) (m)
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
Envelope
XcorrActual Δ13
sw1 and sw3
(b)
Figure 6 Cross-correlated warped signals and their envelope obtained as the modulus of the Hilbert Transform for an impact at position119909119901= 395mm and 119910
119901= 554mm
03 04 05 06 07 0802
025
03
035
04
045
05
055
06
065
07
31 2
5
11 12
9
14 15
17 18
6 7 8
4
10
16
13
x (m)
y(m
)
Figure 7 Localization results for the 18 impacts denoted by thesmall numbers crosses denote the true impact positions the centreof the circles the estimated impact positions 119909
119901 119910119901 and the radii
of the circles is taken equal to 120575cr(119909119901 119910119901)
6 Conclusions
In this work an augmented reality (AR) strategy is proposedto visualize on plate-like structures the outcomes of an impactdetectionmethodology In particular the impact position andenergy are considered To such aim first previous contribu-tions of the authors devoted to signal processing strategiesfor impact localization are exploited and extended to theestimation of the impact energy The experimental resultson an isotropic plate show the accuracy of the methodologyon both impact location and energy estimation Next as anew original contribution to the research the visualization inaugmented reality (AR) of impact position uncertainty andimpact energy is provided The experimental results show
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
08
09
1
Impact number
Nor
mal
ized
ener
gy (a
u)
EhammerEwarped signals
Figure 8 Energy estimation results for the 18 impacts considered
Figure 9 Image on the Vuzix glasses the impact indicator issuperimposed to the external real-world image
how such data can be viewed by the experimenter in real-timedirectly overimposed on the structure
The proposed strategy shows good potential to be used indamage detection andmaintenance operations In fact beside
Journal of Sensors 9
the precise and low computational cost for impact detection(position and energy) it can ease the maintenance practicesince data can be presented directly on the component tomonitor in an effective and intuitive wayThe AR is preferredto the Virtual Reality since the augmented scene is obtainedby adding virtual objects to the real-world eyesight mitigat-ing thus the unphysical feeling that the end-user experiencefrom a complete virtual approach while still supporting himduring the operations in the real-world environment
Further studies are needed to assess the reliability of theproposed technology and the applicability to more complexstructures (eg stiffened plates) and to anisotropic materials
Conflict of Interests
The authors did not receive any financial support from thecommercial identities mentioned in the work The authorsdeclare that there is no conflict of interests regarding thepublication of this paper
References
[1] httpsenwikipediaorgwikiaugmented reality[2] R T Azuma ldquoA survey of augmented realityrdquo Presence vol 6
no 4 pp 355ndash385 1997[3] R Azuma Y Baillot R Behringer S Feiner S Julier and
B MacIntyre ldquoRecent advances in augmented realityrdquo IEEEComputer Graphics and Applications vol 21 no 6 pp 34ndash472001
[4] D Krevelen and R Poleman ldquoA survey of augmented realitytechnologies applications and limitationsrdquo The InternationalJournal of Virtual Reality vol 9 no 2 pp 1ndash20 2010
[5] X Wang M J Kim P E Love and S C Kang ldquoAugmentedreality in built environment classification and implications forfuture researchrdquo Automation in Construction vol 32 pp 1ndash132013
[6] H L Chi S C Kang and X Wang ldquoResearch trends andopportunities of augmented reality applications in architectureengineering and constructionrdquo Automation in Constructionvol 33 pp 116ndash122 2013
[7] S Benbelkacem M Belhocine A Bellarbi N Zenati-Hendaand M Tadjine ldquoAugmented reality for photovoltaic pumpingsystemsmaintenance tasksrdquoRenewable Energy vol 55 pp 428ndash437 2013
[8] J M Antonio S R J Luis and S P Faustino ldquoAugmented andvirtual reality techniques for footwearrdquo Computers in Industry2013
[9] A Farhidzadeh E Dehghan-Niri A Moustafa S Salamoneand A Whittaker ldquoDamage assessment of reinforced concretestructures using fractal analysis of residual crack patternsrdquoExperimental Mechanics pp 1ndash13 2012
[10] B Koo H Choi and T Shon ldquoWiva Wsn monitoringframework based on 3D visualization and augmented realityin mobile devicesrdquo in Ambient Assistive Health and WellnessManagement in the Heart of the City M Mokhtari I KhalilJ Bauchet D Zhang and C Nugent Eds vol 5597 ofLecture Notes in Computer Science pp 158ndash165 Springer BerlinGermany 2009
[11] J L Rose Ultrasonic Waves in Solid Media Cambridge Univer-sity Press 1999
[12] R Seydel and F-K Chang ldquoImpact identification of stiffenedcomposite panels I System developmentrdquo Smart Materials andStructures vol 10 no 2 pp 354ndash369 2001
[13] B Wang J Takatsubo Y Akimune and H Tsuda ldquoDevel-opment of a remote impact damage identification systemrdquoStructural Control and Health Monitoring vol 12 no 3-4 pp301ndash314 2005
[14] Z Su L Ye and Y Lu ldquoGuided Lamb waves for identificationof damage in composite structures a reviewrdquo Journal of Soundand Vibration vol 295 no 3ndash5 pp 753ndash780 2006
[15] T Kundu S Das and K V Jata ldquoPoint of impact predictionin isotropic and anisotropic plates from the acoustic emissiondatardquo Journal of the Acoustical Society of America vol 122 no4 pp 2057ndash2066 2007
[16] T Kundu S Das and K V Jata ldquoDetection of the point ofimpact on a stiffened plate by the acoustic emission techniquerdquoSmartMaterials and Structures vol 18 no 3 Article ID 0350062009
[17] F Ciampa and M Meo ldquoAcoustic emission source localizationand velocity determination of the fundamental mode A
0using
wavelet analysis and a newton-based optimization techniquerdquoSmart Materials and Structures vol 19 no 4 Article ID 0450272010
[18] S Salamone I Bartoli P di Leo et al ldquoHigh-velocity impactlocation on aircraft panels using macro-fiber composite piezo-electric rosettesrdquo Journal of Intelligent Material Systems andStructures vol 21 no 9 pp 887ndash896 2010
[19] A Perelli L de Marchi A Marzani and N Speciale ldquoAcousticemission localization in plates with dispersion and reverber-ations using sparse PZT sensors in passive moderdquo SmartMaterials and Structures vol 21 no 2 Article ID 025010 2012
[20] E D Niri A Farhidzadeh and S Salamone ldquoNonlinear kalmanfiltering for acoustic emission source localization in anisotropicpanelsrdquo Ultrasonics 2013
[21] A Liverani and A Ceruti ldquoInteractive GT code managementfor mechanical part similarity search and cost predictionrdquoComputer-Aided Design and Applications vol 7 no 1 pp 1ndash152010
[22] A Liverani A Ceruti and G Caligiana ldquoTablet-based 3Dsketching and curve reverse modellingrdquo International Journalof Computer Aided Engineering and Technology vol 5 no 2-32013
[23] S Debernardis M Fiorentino M Gattullo G Monno and AE Uva ldquoText readability in head-worn displays color and styleoptimization in video vs optical see-through devicesrdquo IEEETransactions on Visualization and Computer Graphics vol PPno 99 p 1 2013
[24] F Zhou H B-L Dun and M Billinghurst ldquoTrends in aug-mented reality tracking interaction and display a review of tenyears of ISMARrdquo in Proceedings of the 7th IEEE InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo08) pp193ndash202 Cambridge UK September 2008
[25] GWelch and E Foxlin ldquoMotion tracking no silver bullet but arespectable arsenalrdquo IEEE Computer Graphics and Applicationsvol 22 no 6 pp 24ndash38 2002
[26] M Pressigout and E Marchand ldquoHybrid tracking algorithmsfor planar and non-planar structures subject to illuminationchangesrdquo in Proceedings of the 5th IEEE and ACM InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo06)pp 52ndash55 IEEE Computer Society Santa Barbara Calif USAOctober 2006
10 Journal of Sensors
[27] P P Valentini and E Pezzuti ldquoInteractive multibody simula-tion in augmented realityrdquo Journal of Theoretical and AppliedMechanics vol 48 no 3 pp 733ndash750 2010
[28] A David and P Jean Computer Vision A Modern Approach2002
[29] HWu Z Cai and YWang ldquoVision-based auxiliary navigationmethod using augmented reality for unmanned aerial vehiclesrdquoin Proceedings of the 10th IEEE International Conference onIndustrial Informatics (INDIN rsquo12) pp 520ndash525 Beijing ChinaJuly 2012
[30] S Yuen G Yaoyuneyong and E Johnson ldquoAugmented realityan overview and five directions for ar in educationrdquo Journal ofEducational Technology Development and Exchange vol 4 no1 pp 2119ndash2140 2011
[31] D Marquardt ldquoAn algorithm for least-squares estimation ofnonlinear parametersrdquo Journal of the Society For Industrial andApplied Mathematics vol 11 no 2 pp 431ndash441 1963
[32] S Caporale L de Marchi and N Speciale ldquoFrequency warpingbiorthogonal framesrdquo IEEE Transactions on Signal Processingvol 59 no 6 pp 2575ndash2584 2011
[33] httpwwwhitlwashingtoneduartoolkit[34] httpwwwvuzixcomaugmented-realityproducts star1200
html[35] P Bocchini A Marzani and E Viola ldquoGraphical user interface
for guided acoustic wavesrdquo Journal of Computing in CivilEngineering vol 25 no 3 pp 202ndash210 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Sensors 3
(a)
80mm
80m
m
(b)
Figure 1 (a) Vuzix STAR 1200 glasses and (b) Marker features
Principal planeScreen plane
Optical axisxs
ys
0s0c
q
xc
yc
zmym xm xy
OΔy Δx
Q
Zc equiv Zs
PZT-iPlate
Camera
f
Figure 2 Plate 119909 119910 Marker 119909119898 119910119898 119911119898 Camera 119909
119888 119910119888 119911119888 and
Screen 119909119904 119910119904 119911119904 coordinate systems
known Denoting by 119906 and V the row and column of the pixelwith respect to 119906
0and V
0 the row and column of the pixel
in the origin of the screen plane coordinate system (119874119904) and
being 119878119909and 119878119910scale factors in 119909
119904and 119910
119904axis (pixelmeter)
respectively such relation is
[119906
V] = [
119878119909
0 1199060
0 119878119910
V0
][
[
119909119904
119910119904
1
]
]
(2)
Combining (1) and (2) and exploiting homogeneous coor-dinates (4-dimensional) a transformation between pixels andcoordinates in the 3D space can be obtained as
[[[
[
119911119888119906
119911119888V
119911119888
1
]]]
]
=[[[
[
119878119909119891 120574 119906
00
0 119878119910119891 V0
0
0 0 1 0
0 0 0 1
]]]
]
[[[
[
119909119888
119910119888
119911119888
1
]]]
]
= P[[[
[
119909119888
119910119888
119911119888
1
]]]
]
(3)
in which the parameter 120574 related to the camera features isintroduced to account for the distortion effects between theaxis 119906 and V [29] The parameters of the matrix P known
as camerarsquos perspective matrix are obtained by means of theCalibration process
Subsequently the relative position in the 3D spacebetween the marker and the camera coordinate systems isintroduced
[[[
[
119909119888
119910119888
119911119888
1
]]]
]
=[[[
[
11987711
11987712
11987713
119879119909
11987721
11987722
11987723
119879119910
11987731
11987732
11987733
119879119911
0 0 0 1
]]]
]
[[[
[
119909119898
119910119898
119911119898
1
]]]
]
= [R T
01times3
1][[[
[
119909119898
119910119898
119911119898
1
]]]
]
= M[[[
[
119909119898
119910119898
119911119898
1
]]]
]
(4)
where the 3 times 3 Rotation matrix (R) and a 3 times 1 Translationvector (T) computed in real time by the Tracking phasedescribe the pose and position of the camera with respect tothe marker reference system The matrixM is also known asthe external parameters matrix Finally substituting (4) into(3) yields a dynamic relation between each point described in3D marker coordinate system and its representation on a 2Dvirtual image
[[[
[
119911119888119906
119911119888V
119911119888
1
]]]
]
=[[[
[
119878119909119891 119896 119906
00
0 119878119910119891 V0
0
0 0 1 0
0 0 0 1
]]]
]
[[[
[
11987711
11987712
11987713
119879119909
11987721
11987722
11987723
119879119910
11987731
11987732
11987733
119879119911
0 0 0 1
]]]
]
[[[
[
119909119898
119909119898
119911119898
1
]]]
]
= PM[[[
[
119909119898
119910119898
119911119898
1
]]]
]
(5)
Since the marker and the plate reference systems areparallel and shifted of known quantities along the 119909 and 119910
axis that is Δ119909and Δ
119910(see Figure 2) the coordinates of a
point 119901 equiv 119909119901 119910119901 with respect to to the plate coordinate
4 Journal of Sensors
system can be directly related to 119906 and V by means of (5)taking 119909
119898= 119909119901minus Δ119909and 119910
119898= 119910119901minus Δ119910 In this application
the point 119901 is the impact point
Display Finally the Display phase is meant to show to theexperimenter the AR scene The available devices can bedivided into one of the two main groups depending whetherthey show a computer generated image of the external worldand synthetic environment (HeadMountedDisplay (HMD))or a synchronized combination of real-world eyesight andcomputer-generated image (Optical See-Through devices)HMDs are composed by a dark head helmet equipped with apair of projectors displaying external world images acquiredby a camera mounted on the HMD itself the device isso able to combine a background image streaming comingfrom the camera (external view) and a foreground syntheticimage synchronized with the localized optical markers Onthe other hand see-through displays are usually equippedwith a camera projectors and semitransparent lenses theexperimenter can see through the lenses the real-worldeyesight while the virtual scene represented by the virtualelaboration of the image acquired by the camera is projectedonto the lenses
According to [30] also new devices like mobile platforms(eg Android) can be used for AR in which the augmentedimage is displayed onto the screen of a mobile phone or atablet using the device camera to acquire the external image
3 Impact Detection Methodology
In this section the guided waves based methodology toestimate the impact position 119909
119901 119910119901 the uncertainty in such
estimation 120575cr and impact energy 119864119901is presented
31 Hyperbolic Positioning Hyperbolic positioning alsocalled 119898119906119897119905119894119897119886119905119890119903119886119905119894119900119899 is a powerful method to locate theimpact position (119909
119901 119910119901) in a plate Given the positions of at
least three sensors (119909119894 119910119894) on the plate with 119894 = 1 2 3 such
method exploits the differences in distance of propagation(DDOP) traveled by the waves from the impact point to thesensors Δ
119894119895
Δ12= radic(119909
1minus 119909119901)2
+ (1199101minus 119910119901)2
minus radic(1199092minus 119909119901)2
+ (1199102minus 119910119901)2
Δ13= radic(119909
1minus 119909119901)2
+ (1199101minus 119910119901)2
minus radic(1199093minus 119909119901)2
+ (1199103minus 119910119901)2
Δ23= radic(119909
2minus 119909119901)2
+ (1199102minus 119910119901)2
minus radic(1199093minus 119909119901)2
+ (1199103minus 119910119901)2
(6)
in order to determine hyperbolas on which the impact pointmust lie The intersection of the three different hyperbolasΔ12 Δ13 and Δ
23 obtained by solving the system of equa-
tions with the Levenberg-Marquardt algorithm [31] is takento be the impact position
Generally the difference in distance of propagation(DDOP) is obtained by multiplying the difference in time ofarrival (DTOA) measured from the acquired signals as thefirst arrival over a certain threshold by a nominal wave prop-agation speed Unfortunately the potential of such approachis limited in plates where several dispersive modes that iswith a frequency-dependent velocity and attenuation appearsimultaneously in the received signals and the selection ofa wave speed and thus the transformation from DTOA toDDOP is not trivial
To overcome this detrimental effect it was shown in [19]that processing the acquired signals with a suitable transformnamely the Warped Frequency Transform (WFT) a robustestimation of the DDOP is obtained without the need ofmeasuring the DTOA (some details are given in the nextsubsection)
32 DDOP Estimation viaWarped Frequency Transform Letus consider a guided wave signal 119904(119905 119863) detected passivelyin an isotropic plate where 119905 denotes the time and 119863 isthe unknown traveled distance and assume that the 119860
0
mode is within the signal as generally happen when a plateundergoes to an impact The group velocity curve 119888
119872
119892(119891)
of the 1198600mode can be used to compute a warping map
119908(119891) that defines uniquely a Frequency Warping operatorW119908[32] Such operator applied to a 119904(119905 119863) yields to a so-
calledwarped signal 119904119908(119905 119863) = W
119908119904(119905 119863)whose frequency
transform is defined as
FW119908119904 (119905 119863) = [radic (119891)119878 (119908 (119891) 0)] sdot 119890
minus1198952120587119891119870119863 (7)
being (119891) the first derivative of the warpingmap 119878(119908(119891) 0)the warped frequency spectra of the exciting pulse at thepoint of impact (zero traveled distance) and 119870 a warpingmap normalization parameter The dispersive signal 119904(119905 119863)
is thus transformed as in (7) where the dispersive effect ofthe distance is converted into a simple warped time delay119870119863proportional to the distance itself
If so the cross-correlation in the frequency domain of twowarped signals acquired at sensors 119894 = 1 and 119894 = 2 is
FW119908119904 (119905 119863
1) sdot FWlowast
119908119904 (119905 119863
2)
= (119891) sdot10038161003816100381610038161198780 (119908 (119891) 0)
10038161003816100381610038162
sdot 119890minus1198952120587119891119870(119863
1minus1198632)
(8)
where the DDOP Δ12
= 1198631minus 1198632appears in the phase
term Thus the abscissa value at which the cross-correlationenvelope of two signal peaks in the frequencywarped domaincan be directly related to the DDOP of the dispersive signalacquired passively at two different sensors
33 Theoretical Estimation Error of the Impact PositionThe proposed impact localization strategy has an intrinsic
Journal of Sensors 5
uncertainty due to the imperfect knowledge of the materialproperties of the plate the limited sampling frequency andthe unavoidable presence of noise in the measurements Suchuncertainty is strictly related to the sensor topology and itslower bound that is the minimum theoretical estimationerror of the source positions can be estimated by using theCramer-Rao algorithm
Considering 119898 = 3 DDOP measurements the Cramer-Rao value for a point 119901 equiv 119909
119901 119910119901 on the plate is calculated
as
120575cr (119909119901 119910119901) = [C119879A119879 sdot (A sdot R sdot A119879)minus1
sdot AC]minus1
(9)
C is the119898 times 2matrix whose elements are
1198621198941=
1
119888119908
119909119901minus 119909119894
radic(119909119901minus 119909119894)2
+ (119910119901minus 119910119894)2
1198621198942=
1
119888119908
119910119901minus 119910119894
radic(119909119901minus 119909119894)2
+ (119910119901minus 119910119894)2
(10)
where 119888119908
= 119870 sdot 119891119904is the equivalent wave speed obtained
through the time distance mapping described in the warpingprocedure 119870 is the warping map normalization parameterand 119891
119904is the considered sampling frequency
A is the full-rank (119898 minus 1) times 119898matrix
A = [1 minus1 0
1 0 minus1] (11)
R is a 119898 times 119898 diagonal matrix which represents theerror in the measurements The measurement errors areconsidered as independent identically distributed Gaussianrandom variables with zero mean and standard deviation120590119889= 2119888119908119891119904 so that the nonnull elements of R are equal to
1205902
119889
34 Impact Energy Estimation Because of the acousticenergy confinement in the waveguide Lamb waves expe-rience a low attenuation with distance In particular theacquired signal amplitude is inversely proportional to thesquared root of the distance of propagation The estimationof impact energy deserves attention since it can be related tothe level of damage in the component Since the WFT is aunitary transform which preserves the energy of the signal[19] the impact energy 119864
119901can be estimated from the energy
of the warped signals as
119864119901= 119896119864
3
sum
119894=0
int
119905
0
119904119908119894(119905 119863119894)2d119905 (12)
where 119904119908119894(119905 119863119894) with 119894 isin 1 2 3 are the warped versions
of the signals acquired by the three sensors and 119896119864is a
calibration constant
Table 1 Sensor topology
PZT-1 PZT-2 PZT-3119909119894[mm] 250 250 750
119910119894[mm] 250 750 250
4 Impact Data Visualization in AR
Hardware and software settings and testing procedures usedin this work to visualize the outcomes of the impact detectionmethodology in AR are described in the following
An aluminum 1050A square plate 1000mm times 1000mmand 3mm thick was considered (see Figure 3) The nominalproperties considered for the plate are Youngrsquos modulus 119864 =
69GPa Poissonrsquos coefficient ] = 03 andmaterial density 120588 =
2700 kgm3 Three piezoelectric sensors (PZT discs PIC181diameter 10mm thickness 1mm) were bonded to the platesurface at positions reported in Table 1
In this study a vision-based tracking technique isadopted Such approach is usually preferred to sensor-basedtechniques in internal applications due to its higher precisionand easier hardware implementation To such purpose themarker of Figure 1(b) is fixed on the plate at the 119909 119910 = 0 0
mm coordinates The marker has been simply sketched withgraphical software and printed on a paper sheet Differentmarker shapes could be used provided they are asymmetricblack and white and easily recognizable by the AR softwareThe tracking is performed by means of the AR toolkitan available library for augmented reality shared by theUniversity of Washington [33] The AR toolkit is used todetect the marker to measure the image distortion and torelate in time the marker reference system to the image
The experimenter wears a pair of Vuzix STAR 1200 glasses(see Figure 1(a)) a see-trough device specifically designedfor AR applications [34] These glasses include a camera inthe front and two miniaturized projectors displaying imageson the transparent lenses two USB plugs connect the Vuzixglasses with a notebook or a PCThe resolution of the cameraof this see-through glasses can be changed up to 1920 times
1080 pixels and the two projectors support video displayresolutions up to 1280 times 720 At first an image in which themarker is framed with a preset distance and pose (knownposition) of the Vuzix glasses camera is taken the AR toolkitmacros automatically detect the marker in the image andperforms the Calibration computing 120574 (the other camerafeatures are generally known)
The experimenter strikes the plate with the instrumentedhammer (PCB Piezotronics) used to simulate impacts andthe guided waves are signals gathered by the sensors throughan oscilloscope (LC534 series LeCroy) at a sampling fre-quency of 119891
119904= 300 kHz Acquisitions are triggered when the
signal received from one of the sensors reaches a thresholdlevel of 140mV pretrigger recording is enabled to obtainthe previous history of each signal The detected waveformsare directly processed in a PC to find the position 119909
119901 119910119901
position uncertainty 120575cr and energy 119864119901of the impact Such
data are passed to the AR algorithm for the final visualization
6 Journal of Sensors
PC for impactdetection (positionuncertainty and energy)and image processing(AR toolkit software)
Wuzix glasses
Marker
hammer
MarkerOscilloscope connected via GPIB to the PC
PZT-1
PZT-1PZT-2
PZT-3
Instrumented impact
Y
XO
Figure 3 Experimental setup for impact localization and highlight of PZT-1 placed at 119909 119910 = 250 250mm and the marker placed atcorner 119909 119910 = 0 0mm
(a) (b) (c)
(d) (e) (f)
Figure 4 Image analysis image acquired by Vuzix camera (a) thresholded image (b) connection of pixel to detect objects (c) contoursdetection (d) marker edges detection and pose estimation (e) and impact point detection in AR (f)
During tracking each frame acquired by the glassesrsquocamera is processed by the AR toolkit software followingthese steps application of threshold detection of connectedobjects detection of objects contours detection of markeredges computation of image distance and pose with respectto the camera reference system by the evaluation of the
marker distortion and projection of the impact point coor-dinates 119909
119901 119910119901 on the image in terms of 119906 and V
Finally a designed virtual symbol or image centered inthe right position (119906 and V) can be projected to the realworld image in real time (see Figure 4) exploiting the glassesprojectors
Journal of Sensors 7y
(m)
x (m)
6070
4060
50 60 70
3040
405060
70
304060 50
506070
40507080
506070
30
30 3030
30
30
20
20
20
20
20
2020
40
40
4040
10
10
10
10
50
6040
60
PZT-1
PZT-2
PZT-3
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
80
80
80
5070
80
80
8080
Figure 5 Cramer-Rao lower bound expressed in [mm]
Themarker detection procedure does not require that theexperimentersrsquo point of view is perpendicular to the surfaceon which the marker lies so that the experimenter can viewthe impact point from several points of view rotating the headin a natural way
5 Results of the Case Study
51 Impact Location Estimation To process the acquiredsignals with the WFT first a guided mode must be selectedand its warpingmap119908(119891) is designed Here the fundamentalmode 119860
0was selected since the contribution of 119860
0in the
signal is expected to be much more relevant than the oneof 1198780for two main reasons (i) the wavelength tuning effect
imposed by the sensorsplate properties filters out most ofthe 1198780wave (ii) due to the out-of-plane excitation the energy
in the 1198600mode is considerably greater than that retained
by the 1198780mode Therefore the group velocity curve of the
1198600mode was predicted [35] used to compute the warping
map 119908(119891) and the normalization parameter 119870 as well as theproper Frequency Warping operator W
119908 At this point for
the given coordinates of the transducers 119909119894 119910119894 the selected
sampling frequency119891119904 and the parameter119870 theCramer-Rao
lower bound was computed for each point of the plate andrepresented in Figure 5 as a contour plot
Then the plate was impacted the signals acquired andthe cross-correlation (Xcorr) of thewarped signals computedFor instance the Xcorr between 119904
1199081(119905 1198631) and 119904
1199082(119905 1198632) for
an impact 119909119901
= 395mm and 119910119901
= 554mm is depictedin Figure 6(a) together with its envelope computed as themodulus of the Hilbert Transform Similarly in Figure 6(b)is shown the Xcorr and its envelope for 119904
1199081(119905 1198631) and
1199041199083(119905 1198633)
As can be seen the abscissas of envelope maxima corre-spond to the actual difference in distance of propagation Δ
12
and Δ13 respectively Similar accuracy was obtained for Δ
23
not shown in Figure 6 Such DDOP define the hyperbolasused to estimate the impact position
Such approach was used next to locate 18 impacts onthe plate surface The results of the proposed procedure canbe seen in Figure 7 where the crosses denote the positionswhere the plate has been impacted the centre of the circlesthe impact positions estimated by the proposed procedureand whereas the circlesrsquo radii were set equal to the valueof 120575cr(119909119901 119910119901) for the estimated impact position It is worthnoting how the circles always surround the true impactpositions
52 Impact Energy Estimation The impact energy 119864119901for
the 18 different impacts considered was estimated as detailedin Section 34 and represented in Figure 8 as small circlesSuch estimated impact energies were compared with thosemeasured by the instrumented hammer 119864
ℎ In particular
119864ℎwas computed as the squared value of the velocity time-
history obtained by integrating the acceleration time-historyregistered by the instrumented hammer As can be seen avery good agreement between the two quantities was foundthus verifying that an efficient impact energy estimation canbe performed from warped waveforms 119904
119908119894 The discrepancy
in the energy estimation that appears in cases 10 and 14 maybe due to several factors such as the suboptimal selectionof the calibration constant 119896
119864 or the jamming effect due
to edge reflections Most likely the discrepancy is due tothe difference in the frequency response between the impacthammer (which acts as low pass filter in the 0ndash4 kHz range)and the piezoelectric sensors (which have a much broaderfrequency response)
53 AR Visualization Following the descried AR approachthe experimenter wears a pair of AR glasses and frames boththe marker and the zone in which the impact is applied Thealuminum panel is hit with the hammer the impact detectionprocedure starts and the estimated coordinates of the impactpoint with respect to the marker system 119909
119898= 119909119901minus Δ119909and
119910119898= 119910119901minusΔ119910are passed to the visualization algorithm along
with the 120575cr and 119864119901As shown in Figure 9 a symbol formed by three squares
has been designed to represent the data obtained from theimpact methodology the centre of the red square showsthe estimated impact position 119909
119901 119910119901 the side length of
the green square denotes the uncertainty in the estimatedposition 120575cr(119909119901 119910119901) whereas the yellow square denotes thestrength of the impact a yellow square close to the red squaremeans low energy 119864
119901asymp 0 while a yellow square close to the
green square means high energy 119864119901asymp 1 The experimenter
can thus visually evaluate the energy at the impact in anintuitive way Figure 9 shows the view through the glasseslenses after the augmentation
8 Journal of Sensors
Difference in distance of propagation (DDOP) (m)
Envelope
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
XcorrActual Δ12
sw1 and sw2
(a)
Difference in distance of propagation (DDOP) (m)
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
Envelope
XcorrActual Δ13
sw1 and sw3
(b)
Figure 6 Cross-correlated warped signals and their envelope obtained as the modulus of the Hilbert Transform for an impact at position119909119901= 395mm and 119910
119901= 554mm
03 04 05 06 07 0802
025
03
035
04
045
05
055
06
065
07
31 2
5
11 12
9
14 15
17 18
6 7 8
4
10
16
13
x (m)
y(m
)
Figure 7 Localization results for the 18 impacts denoted by thesmall numbers crosses denote the true impact positions the centreof the circles the estimated impact positions 119909
119901 119910119901 and the radii
of the circles is taken equal to 120575cr(119909119901 119910119901)
6 Conclusions
In this work an augmented reality (AR) strategy is proposedto visualize on plate-like structures the outcomes of an impactdetectionmethodology In particular the impact position andenergy are considered To such aim first previous contribu-tions of the authors devoted to signal processing strategiesfor impact localization are exploited and extended to theestimation of the impact energy The experimental resultson an isotropic plate show the accuracy of the methodologyon both impact location and energy estimation Next as anew original contribution to the research the visualization inaugmented reality (AR) of impact position uncertainty andimpact energy is provided The experimental results show
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
08
09
1
Impact number
Nor
mal
ized
ener
gy (a
u)
EhammerEwarped signals
Figure 8 Energy estimation results for the 18 impacts considered
Figure 9 Image on the Vuzix glasses the impact indicator issuperimposed to the external real-world image
how such data can be viewed by the experimenter in real-timedirectly overimposed on the structure
The proposed strategy shows good potential to be used indamage detection andmaintenance operations In fact beside
Journal of Sensors 9
the precise and low computational cost for impact detection(position and energy) it can ease the maintenance practicesince data can be presented directly on the component tomonitor in an effective and intuitive wayThe AR is preferredto the Virtual Reality since the augmented scene is obtainedby adding virtual objects to the real-world eyesight mitigat-ing thus the unphysical feeling that the end-user experiencefrom a complete virtual approach while still supporting himduring the operations in the real-world environment
Further studies are needed to assess the reliability of theproposed technology and the applicability to more complexstructures (eg stiffened plates) and to anisotropic materials
Conflict of Interests
The authors did not receive any financial support from thecommercial identities mentioned in the work The authorsdeclare that there is no conflict of interests regarding thepublication of this paper
References
[1] httpsenwikipediaorgwikiaugmented reality[2] R T Azuma ldquoA survey of augmented realityrdquo Presence vol 6
no 4 pp 355ndash385 1997[3] R Azuma Y Baillot R Behringer S Feiner S Julier and
B MacIntyre ldquoRecent advances in augmented realityrdquo IEEEComputer Graphics and Applications vol 21 no 6 pp 34ndash472001
[4] D Krevelen and R Poleman ldquoA survey of augmented realitytechnologies applications and limitationsrdquo The InternationalJournal of Virtual Reality vol 9 no 2 pp 1ndash20 2010
[5] X Wang M J Kim P E Love and S C Kang ldquoAugmentedreality in built environment classification and implications forfuture researchrdquo Automation in Construction vol 32 pp 1ndash132013
[6] H L Chi S C Kang and X Wang ldquoResearch trends andopportunities of augmented reality applications in architectureengineering and constructionrdquo Automation in Constructionvol 33 pp 116ndash122 2013
[7] S Benbelkacem M Belhocine A Bellarbi N Zenati-Hendaand M Tadjine ldquoAugmented reality for photovoltaic pumpingsystemsmaintenance tasksrdquoRenewable Energy vol 55 pp 428ndash437 2013
[8] J M Antonio S R J Luis and S P Faustino ldquoAugmented andvirtual reality techniques for footwearrdquo Computers in Industry2013
[9] A Farhidzadeh E Dehghan-Niri A Moustafa S Salamoneand A Whittaker ldquoDamage assessment of reinforced concretestructures using fractal analysis of residual crack patternsrdquoExperimental Mechanics pp 1ndash13 2012
[10] B Koo H Choi and T Shon ldquoWiva Wsn monitoringframework based on 3D visualization and augmented realityin mobile devicesrdquo in Ambient Assistive Health and WellnessManagement in the Heart of the City M Mokhtari I KhalilJ Bauchet D Zhang and C Nugent Eds vol 5597 ofLecture Notes in Computer Science pp 158ndash165 Springer BerlinGermany 2009
[11] J L Rose Ultrasonic Waves in Solid Media Cambridge Univer-sity Press 1999
[12] R Seydel and F-K Chang ldquoImpact identification of stiffenedcomposite panels I System developmentrdquo Smart Materials andStructures vol 10 no 2 pp 354ndash369 2001
[13] B Wang J Takatsubo Y Akimune and H Tsuda ldquoDevel-opment of a remote impact damage identification systemrdquoStructural Control and Health Monitoring vol 12 no 3-4 pp301ndash314 2005
[14] Z Su L Ye and Y Lu ldquoGuided Lamb waves for identificationof damage in composite structures a reviewrdquo Journal of Soundand Vibration vol 295 no 3ndash5 pp 753ndash780 2006
[15] T Kundu S Das and K V Jata ldquoPoint of impact predictionin isotropic and anisotropic plates from the acoustic emissiondatardquo Journal of the Acoustical Society of America vol 122 no4 pp 2057ndash2066 2007
[16] T Kundu S Das and K V Jata ldquoDetection of the point ofimpact on a stiffened plate by the acoustic emission techniquerdquoSmartMaterials and Structures vol 18 no 3 Article ID 0350062009
[17] F Ciampa and M Meo ldquoAcoustic emission source localizationand velocity determination of the fundamental mode A
0using
wavelet analysis and a newton-based optimization techniquerdquoSmart Materials and Structures vol 19 no 4 Article ID 0450272010
[18] S Salamone I Bartoli P di Leo et al ldquoHigh-velocity impactlocation on aircraft panels using macro-fiber composite piezo-electric rosettesrdquo Journal of Intelligent Material Systems andStructures vol 21 no 9 pp 887ndash896 2010
[19] A Perelli L de Marchi A Marzani and N Speciale ldquoAcousticemission localization in plates with dispersion and reverber-ations using sparse PZT sensors in passive moderdquo SmartMaterials and Structures vol 21 no 2 Article ID 025010 2012
[20] E D Niri A Farhidzadeh and S Salamone ldquoNonlinear kalmanfiltering for acoustic emission source localization in anisotropicpanelsrdquo Ultrasonics 2013
[21] A Liverani and A Ceruti ldquoInteractive GT code managementfor mechanical part similarity search and cost predictionrdquoComputer-Aided Design and Applications vol 7 no 1 pp 1ndash152010
[22] A Liverani A Ceruti and G Caligiana ldquoTablet-based 3Dsketching and curve reverse modellingrdquo International Journalof Computer Aided Engineering and Technology vol 5 no 2-32013
[23] S Debernardis M Fiorentino M Gattullo G Monno and AE Uva ldquoText readability in head-worn displays color and styleoptimization in video vs optical see-through devicesrdquo IEEETransactions on Visualization and Computer Graphics vol PPno 99 p 1 2013
[24] F Zhou H B-L Dun and M Billinghurst ldquoTrends in aug-mented reality tracking interaction and display a review of tenyears of ISMARrdquo in Proceedings of the 7th IEEE InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo08) pp193ndash202 Cambridge UK September 2008
[25] GWelch and E Foxlin ldquoMotion tracking no silver bullet but arespectable arsenalrdquo IEEE Computer Graphics and Applicationsvol 22 no 6 pp 24ndash38 2002
[26] M Pressigout and E Marchand ldquoHybrid tracking algorithmsfor planar and non-planar structures subject to illuminationchangesrdquo in Proceedings of the 5th IEEE and ACM InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo06)pp 52ndash55 IEEE Computer Society Santa Barbara Calif USAOctober 2006
10 Journal of Sensors
[27] P P Valentini and E Pezzuti ldquoInteractive multibody simula-tion in augmented realityrdquo Journal of Theoretical and AppliedMechanics vol 48 no 3 pp 733ndash750 2010
[28] A David and P Jean Computer Vision A Modern Approach2002
[29] HWu Z Cai and YWang ldquoVision-based auxiliary navigationmethod using augmented reality for unmanned aerial vehiclesrdquoin Proceedings of the 10th IEEE International Conference onIndustrial Informatics (INDIN rsquo12) pp 520ndash525 Beijing ChinaJuly 2012
[30] S Yuen G Yaoyuneyong and E Johnson ldquoAugmented realityan overview and five directions for ar in educationrdquo Journal ofEducational Technology Development and Exchange vol 4 no1 pp 2119ndash2140 2011
[31] D Marquardt ldquoAn algorithm for least-squares estimation ofnonlinear parametersrdquo Journal of the Society For Industrial andApplied Mathematics vol 11 no 2 pp 431ndash441 1963
[32] S Caporale L de Marchi and N Speciale ldquoFrequency warpingbiorthogonal framesrdquo IEEE Transactions on Signal Processingvol 59 no 6 pp 2575ndash2584 2011
[33] httpwwwhitlwashingtoneduartoolkit[34] httpwwwvuzixcomaugmented-realityproducts star1200
html[35] P Bocchini A Marzani and E Viola ldquoGraphical user interface
for guided acoustic wavesrdquo Journal of Computing in CivilEngineering vol 25 no 3 pp 202ndash210 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Journal of Sensors
system can be directly related to 119906 and V by means of (5)taking 119909
119898= 119909119901minus Δ119909and 119910
119898= 119910119901minus Δ119910 In this application
the point 119901 is the impact point
Display Finally the Display phase is meant to show to theexperimenter the AR scene The available devices can bedivided into one of the two main groups depending whetherthey show a computer generated image of the external worldand synthetic environment (HeadMountedDisplay (HMD))or a synchronized combination of real-world eyesight andcomputer-generated image (Optical See-Through devices)HMDs are composed by a dark head helmet equipped with apair of projectors displaying external world images acquiredby a camera mounted on the HMD itself the device isso able to combine a background image streaming comingfrom the camera (external view) and a foreground syntheticimage synchronized with the localized optical markers Onthe other hand see-through displays are usually equippedwith a camera projectors and semitransparent lenses theexperimenter can see through the lenses the real-worldeyesight while the virtual scene represented by the virtualelaboration of the image acquired by the camera is projectedonto the lenses
According to [30] also new devices like mobile platforms(eg Android) can be used for AR in which the augmentedimage is displayed onto the screen of a mobile phone or atablet using the device camera to acquire the external image
3 Impact Detection Methodology
In this section the guided waves based methodology toestimate the impact position 119909
119901 119910119901 the uncertainty in such
estimation 120575cr and impact energy 119864119901is presented
31 Hyperbolic Positioning Hyperbolic positioning alsocalled 119898119906119897119905119894119897119886119905119890119903119886119905119894119900119899 is a powerful method to locate theimpact position (119909
119901 119910119901) in a plate Given the positions of at
least three sensors (119909119894 119910119894) on the plate with 119894 = 1 2 3 such
method exploits the differences in distance of propagation(DDOP) traveled by the waves from the impact point to thesensors Δ
119894119895
Δ12= radic(119909
1minus 119909119901)2
+ (1199101minus 119910119901)2
minus radic(1199092minus 119909119901)2
+ (1199102minus 119910119901)2
Δ13= radic(119909
1minus 119909119901)2
+ (1199101minus 119910119901)2
minus radic(1199093minus 119909119901)2
+ (1199103minus 119910119901)2
Δ23= radic(119909
2minus 119909119901)2
+ (1199102minus 119910119901)2
minus radic(1199093minus 119909119901)2
+ (1199103minus 119910119901)2
(6)
in order to determine hyperbolas on which the impact pointmust lie The intersection of the three different hyperbolasΔ12 Δ13 and Δ
23 obtained by solving the system of equa-
tions with the Levenberg-Marquardt algorithm [31] is takento be the impact position
Generally the difference in distance of propagation(DDOP) is obtained by multiplying the difference in time ofarrival (DTOA) measured from the acquired signals as thefirst arrival over a certain threshold by a nominal wave prop-agation speed Unfortunately the potential of such approachis limited in plates where several dispersive modes that iswith a frequency-dependent velocity and attenuation appearsimultaneously in the received signals and the selection ofa wave speed and thus the transformation from DTOA toDDOP is not trivial
To overcome this detrimental effect it was shown in [19]that processing the acquired signals with a suitable transformnamely the Warped Frequency Transform (WFT) a robustestimation of the DDOP is obtained without the need ofmeasuring the DTOA (some details are given in the nextsubsection)
32 DDOP Estimation viaWarped Frequency Transform Letus consider a guided wave signal 119904(119905 119863) detected passivelyin an isotropic plate where 119905 denotes the time and 119863 isthe unknown traveled distance and assume that the 119860
0
mode is within the signal as generally happen when a plateundergoes to an impact The group velocity curve 119888
119872
119892(119891)
of the 1198600mode can be used to compute a warping map
119908(119891) that defines uniquely a Frequency Warping operatorW119908[32] Such operator applied to a 119904(119905 119863) yields to a so-
calledwarped signal 119904119908(119905 119863) = W
119908119904(119905 119863)whose frequency
transform is defined as
FW119908119904 (119905 119863) = [radic (119891)119878 (119908 (119891) 0)] sdot 119890
minus1198952120587119891119870119863 (7)
being (119891) the first derivative of the warpingmap 119878(119908(119891) 0)the warped frequency spectra of the exciting pulse at thepoint of impact (zero traveled distance) and 119870 a warpingmap normalization parameter The dispersive signal 119904(119905 119863)
is thus transformed as in (7) where the dispersive effect ofthe distance is converted into a simple warped time delay119870119863proportional to the distance itself
If so the cross-correlation in the frequency domain of twowarped signals acquired at sensors 119894 = 1 and 119894 = 2 is
FW119908119904 (119905 119863
1) sdot FWlowast
119908119904 (119905 119863
2)
= (119891) sdot10038161003816100381610038161198780 (119908 (119891) 0)
10038161003816100381610038162
sdot 119890minus1198952120587119891119870(119863
1minus1198632)
(8)
where the DDOP Δ12
= 1198631minus 1198632appears in the phase
term Thus the abscissa value at which the cross-correlationenvelope of two signal peaks in the frequencywarped domaincan be directly related to the DDOP of the dispersive signalacquired passively at two different sensors
33 Theoretical Estimation Error of the Impact PositionThe proposed impact localization strategy has an intrinsic
Journal of Sensors 5
uncertainty due to the imperfect knowledge of the materialproperties of the plate the limited sampling frequency andthe unavoidable presence of noise in the measurements Suchuncertainty is strictly related to the sensor topology and itslower bound that is the minimum theoretical estimationerror of the source positions can be estimated by using theCramer-Rao algorithm
Considering 119898 = 3 DDOP measurements the Cramer-Rao value for a point 119901 equiv 119909
119901 119910119901 on the plate is calculated
as
120575cr (119909119901 119910119901) = [C119879A119879 sdot (A sdot R sdot A119879)minus1
sdot AC]minus1
(9)
C is the119898 times 2matrix whose elements are
1198621198941=
1
119888119908
119909119901minus 119909119894
radic(119909119901minus 119909119894)2
+ (119910119901minus 119910119894)2
1198621198942=
1
119888119908
119910119901minus 119910119894
radic(119909119901minus 119909119894)2
+ (119910119901minus 119910119894)2
(10)
where 119888119908
= 119870 sdot 119891119904is the equivalent wave speed obtained
through the time distance mapping described in the warpingprocedure 119870 is the warping map normalization parameterand 119891
119904is the considered sampling frequency
A is the full-rank (119898 minus 1) times 119898matrix
A = [1 minus1 0
1 0 minus1] (11)
R is a 119898 times 119898 diagonal matrix which represents theerror in the measurements The measurement errors areconsidered as independent identically distributed Gaussianrandom variables with zero mean and standard deviation120590119889= 2119888119908119891119904 so that the nonnull elements of R are equal to
1205902
119889
34 Impact Energy Estimation Because of the acousticenergy confinement in the waveguide Lamb waves expe-rience a low attenuation with distance In particular theacquired signal amplitude is inversely proportional to thesquared root of the distance of propagation The estimationof impact energy deserves attention since it can be related tothe level of damage in the component Since the WFT is aunitary transform which preserves the energy of the signal[19] the impact energy 119864
119901can be estimated from the energy
of the warped signals as
119864119901= 119896119864
3
sum
119894=0
int
119905
0
119904119908119894(119905 119863119894)2d119905 (12)
where 119904119908119894(119905 119863119894) with 119894 isin 1 2 3 are the warped versions
of the signals acquired by the three sensors and 119896119864is a
calibration constant
Table 1 Sensor topology
PZT-1 PZT-2 PZT-3119909119894[mm] 250 250 750
119910119894[mm] 250 750 250
4 Impact Data Visualization in AR
Hardware and software settings and testing procedures usedin this work to visualize the outcomes of the impact detectionmethodology in AR are described in the following
An aluminum 1050A square plate 1000mm times 1000mmand 3mm thick was considered (see Figure 3) The nominalproperties considered for the plate are Youngrsquos modulus 119864 =
69GPa Poissonrsquos coefficient ] = 03 andmaterial density 120588 =
2700 kgm3 Three piezoelectric sensors (PZT discs PIC181diameter 10mm thickness 1mm) were bonded to the platesurface at positions reported in Table 1
In this study a vision-based tracking technique isadopted Such approach is usually preferred to sensor-basedtechniques in internal applications due to its higher precisionand easier hardware implementation To such purpose themarker of Figure 1(b) is fixed on the plate at the 119909 119910 = 0 0
mm coordinates The marker has been simply sketched withgraphical software and printed on a paper sheet Differentmarker shapes could be used provided they are asymmetricblack and white and easily recognizable by the AR softwareThe tracking is performed by means of the AR toolkitan available library for augmented reality shared by theUniversity of Washington [33] The AR toolkit is used todetect the marker to measure the image distortion and torelate in time the marker reference system to the image
The experimenter wears a pair of Vuzix STAR 1200 glasses(see Figure 1(a)) a see-trough device specifically designedfor AR applications [34] These glasses include a camera inthe front and two miniaturized projectors displaying imageson the transparent lenses two USB plugs connect the Vuzixglasses with a notebook or a PCThe resolution of the cameraof this see-through glasses can be changed up to 1920 times
1080 pixels and the two projectors support video displayresolutions up to 1280 times 720 At first an image in which themarker is framed with a preset distance and pose (knownposition) of the Vuzix glasses camera is taken the AR toolkitmacros automatically detect the marker in the image andperforms the Calibration computing 120574 (the other camerafeatures are generally known)
The experimenter strikes the plate with the instrumentedhammer (PCB Piezotronics) used to simulate impacts andthe guided waves are signals gathered by the sensors throughan oscilloscope (LC534 series LeCroy) at a sampling fre-quency of 119891
119904= 300 kHz Acquisitions are triggered when the
signal received from one of the sensors reaches a thresholdlevel of 140mV pretrigger recording is enabled to obtainthe previous history of each signal The detected waveformsare directly processed in a PC to find the position 119909
119901 119910119901
position uncertainty 120575cr and energy 119864119901of the impact Such
data are passed to the AR algorithm for the final visualization
6 Journal of Sensors
PC for impactdetection (positionuncertainty and energy)and image processing(AR toolkit software)
Wuzix glasses
Marker
hammer
MarkerOscilloscope connected via GPIB to the PC
PZT-1
PZT-1PZT-2
PZT-3
Instrumented impact
Y
XO
Figure 3 Experimental setup for impact localization and highlight of PZT-1 placed at 119909 119910 = 250 250mm and the marker placed atcorner 119909 119910 = 0 0mm
(a) (b) (c)
(d) (e) (f)
Figure 4 Image analysis image acquired by Vuzix camera (a) thresholded image (b) connection of pixel to detect objects (c) contoursdetection (d) marker edges detection and pose estimation (e) and impact point detection in AR (f)
During tracking each frame acquired by the glassesrsquocamera is processed by the AR toolkit software followingthese steps application of threshold detection of connectedobjects detection of objects contours detection of markeredges computation of image distance and pose with respectto the camera reference system by the evaluation of the
marker distortion and projection of the impact point coor-dinates 119909
119901 119910119901 on the image in terms of 119906 and V
Finally a designed virtual symbol or image centered inthe right position (119906 and V) can be projected to the realworld image in real time (see Figure 4) exploiting the glassesprojectors
Journal of Sensors 7y
(m)
x (m)
6070
4060
50 60 70
3040
405060
70
304060 50
506070
40507080
506070
30
30 3030
30
30
20
20
20
20
20
2020
40
40
4040
10
10
10
10
50
6040
60
PZT-1
PZT-2
PZT-3
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
80
80
80
5070
80
80
8080
Figure 5 Cramer-Rao lower bound expressed in [mm]
Themarker detection procedure does not require that theexperimentersrsquo point of view is perpendicular to the surfaceon which the marker lies so that the experimenter can viewthe impact point from several points of view rotating the headin a natural way
5 Results of the Case Study
51 Impact Location Estimation To process the acquiredsignals with the WFT first a guided mode must be selectedand its warpingmap119908(119891) is designed Here the fundamentalmode 119860
0was selected since the contribution of 119860
0in the
signal is expected to be much more relevant than the oneof 1198780for two main reasons (i) the wavelength tuning effect
imposed by the sensorsplate properties filters out most ofthe 1198780wave (ii) due to the out-of-plane excitation the energy
in the 1198600mode is considerably greater than that retained
by the 1198780mode Therefore the group velocity curve of the
1198600mode was predicted [35] used to compute the warping
map 119908(119891) and the normalization parameter 119870 as well as theproper Frequency Warping operator W
119908 At this point for
the given coordinates of the transducers 119909119894 119910119894 the selected
sampling frequency119891119904 and the parameter119870 theCramer-Rao
lower bound was computed for each point of the plate andrepresented in Figure 5 as a contour plot
Then the plate was impacted the signals acquired andthe cross-correlation (Xcorr) of thewarped signals computedFor instance the Xcorr between 119904
1199081(119905 1198631) and 119904
1199082(119905 1198632) for
an impact 119909119901
= 395mm and 119910119901
= 554mm is depictedin Figure 6(a) together with its envelope computed as themodulus of the Hilbert Transform Similarly in Figure 6(b)is shown the Xcorr and its envelope for 119904
1199081(119905 1198631) and
1199041199083(119905 1198633)
As can be seen the abscissas of envelope maxima corre-spond to the actual difference in distance of propagation Δ
12
and Δ13 respectively Similar accuracy was obtained for Δ
23
not shown in Figure 6 Such DDOP define the hyperbolasused to estimate the impact position
Such approach was used next to locate 18 impacts onthe plate surface The results of the proposed procedure canbe seen in Figure 7 where the crosses denote the positionswhere the plate has been impacted the centre of the circlesthe impact positions estimated by the proposed procedureand whereas the circlesrsquo radii were set equal to the valueof 120575cr(119909119901 119910119901) for the estimated impact position It is worthnoting how the circles always surround the true impactpositions
52 Impact Energy Estimation The impact energy 119864119901for
the 18 different impacts considered was estimated as detailedin Section 34 and represented in Figure 8 as small circlesSuch estimated impact energies were compared with thosemeasured by the instrumented hammer 119864
ℎ In particular
119864ℎwas computed as the squared value of the velocity time-
history obtained by integrating the acceleration time-historyregistered by the instrumented hammer As can be seen avery good agreement between the two quantities was foundthus verifying that an efficient impact energy estimation canbe performed from warped waveforms 119904
119908119894 The discrepancy
in the energy estimation that appears in cases 10 and 14 maybe due to several factors such as the suboptimal selectionof the calibration constant 119896
119864 or the jamming effect due
to edge reflections Most likely the discrepancy is due tothe difference in the frequency response between the impacthammer (which acts as low pass filter in the 0ndash4 kHz range)and the piezoelectric sensors (which have a much broaderfrequency response)
53 AR Visualization Following the descried AR approachthe experimenter wears a pair of AR glasses and frames boththe marker and the zone in which the impact is applied Thealuminum panel is hit with the hammer the impact detectionprocedure starts and the estimated coordinates of the impactpoint with respect to the marker system 119909
119898= 119909119901minus Δ119909and
119910119898= 119910119901minusΔ119910are passed to the visualization algorithm along
with the 120575cr and 119864119901As shown in Figure 9 a symbol formed by three squares
has been designed to represent the data obtained from theimpact methodology the centre of the red square showsthe estimated impact position 119909
119901 119910119901 the side length of
the green square denotes the uncertainty in the estimatedposition 120575cr(119909119901 119910119901) whereas the yellow square denotes thestrength of the impact a yellow square close to the red squaremeans low energy 119864
119901asymp 0 while a yellow square close to the
green square means high energy 119864119901asymp 1 The experimenter
can thus visually evaluate the energy at the impact in anintuitive way Figure 9 shows the view through the glasseslenses after the augmentation
8 Journal of Sensors
Difference in distance of propagation (DDOP) (m)
Envelope
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
XcorrActual Δ12
sw1 and sw2
(a)
Difference in distance of propagation (DDOP) (m)
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
Envelope
XcorrActual Δ13
sw1 and sw3
(b)
Figure 6 Cross-correlated warped signals and their envelope obtained as the modulus of the Hilbert Transform for an impact at position119909119901= 395mm and 119910
119901= 554mm
03 04 05 06 07 0802
025
03
035
04
045
05
055
06
065
07
31 2
5
11 12
9
14 15
17 18
6 7 8
4
10
16
13
x (m)
y(m
)
Figure 7 Localization results for the 18 impacts denoted by thesmall numbers crosses denote the true impact positions the centreof the circles the estimated impact positions 119909
119901 119910119901 and the radii
of the circles is taken equal to 120575cr(119909119901 119910119901)
6 Conclusions
In this work an augmented reality (AR) strategy is proposedto visualize on plate-like structures the outcomes of an impactdetectionmethodology In particular the impact position andenergy are considered To such aim first previous contribu-tions of the authors devoted to signal processing strategiesfor impact localization are exploited and extended to theestimation of the impact energy The experimental resultson an isotropic plate show the accuracy of the methodologyon both impact location and energy estimation Next as anew original contribution to the research the visualization inaugmented reality (AR) of impact position uncertainty andimpact energy is provided The experimental results show
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
08
09
1
Impact number
Nor
mal
ized
ener
gy (a
u)
EhammerEwarped signals
Figure 8 Energy estimation results for the 18 impacts considered
Figure 9 Image on the Vuzix glasses the impact indicator issuperimposed to the external real-world image
how such data can be viewed by the experimenter in real-timedirectly overimposed on the structure
The proposed strategy shows good potential to be used indamage detection andmaintenance operations In fact beside
Journal of Sensors 9
the precise and low computational cost for impact detection(position and energy) it can ease the maintenance practicesince data can be presented directly on the component tomonitor in an effective and intuitive wayThe AR is preferredto the Virtual Reality since the augmented scene is obtainedby adding virtual objects to the real-world eyesight mitigat-ing thus the unphysical feeling that the end-user experiencefrom a complete virtual approach while still supporting himduring the operations in the real-world environment
Further studies are needed to assess the reliability of theproposed technology and the applicability to more complexstructures (eg stiffened plates) and to anisotropic materials
Conflict of Interests
The authors did not receive any financial support from thecommercial identities mentioned in the work The authorsdeclare that there is no conflict of interests regarding thepublication of this paper
References
[1] httpsenwikipediaorgwikiaugmented reality[2] R T Azuma ldquoA survey of augmented realityrdquo Presence vol 6
no 4 pp 355ndash385 1997[3] R Azuma Y Baillot R Behringer S Feiner S Julier and
B MacIntyre ldquoRecent advances in augmented realityrdquo IEEEComputer Graphics and Applications vol 21 no 6 pp 34ndash472001
[4] D Krevelen and R Poleman ldquoA survey of augmented realitytechnologies applications and limitationsrdquo The InternationalJournal of Virtual Reality vol 9 no 2 pp 1ndash20 2010
[5] X Wang M J Kim P E Love and S C Kang ldquoAugmentedreality in built environment classification and implications forfuture researchrdquo Automation in Construction vol 32 pp 1ndash132013
[6] H L Chi S C Kang and X Wang ldquoResearch trends andopportunities of augmented reality applications in architectureengineering and constructionrdquo Automation in Constructionvol 33 pp 116ndash122 2013
[7] S Benbelkacem M Belhocine A Bellarbi N Zenati-Hendaand M Tadjine ldquoAugmented reality for photovoltaic pumpingsystemsmaintenance tasksrdquoRenewable Energy vol 55 pp 428ndash437 2013
[8] J M Antonio S R J Luis and S P Faustino ldquoAugmented andvirtual reality techniques for footwearrdquo Computers in Industry2013
[9] A Farhidzadeh E Dehghan-Niri A Moustafa S Salamoneand A Whittaker ldquoDamage assessment of reinforced concretestructures using fractal analysis of residual crack patternsrdquoExperimental Mechanics pp 1ndash13 2012
[10] B Koo H Choi and T Shon ldquoWiva Wsn monitoringframework based on 3D visualization and augmented realityin mobile devicesrdquo in Ambient Assistive Health and WellnessManagement in the Heart of the City M Mokhtari I KhalilJ Bauchet D Zhang and C Nugent Eds vol 5597 ofLecture Notes in Computer Science pp 158ndash165 Springer BerlinGermany 2009
[11] J L Rose Ultrasonic Waves in Solid Media Cambridge Univer-sity Press 1999
[12] R Seydel and F-K Chang ldquoImpact identification of stiffenedcomposite panels I System developmentrdquo Smart Materials andStructures vol 10 no 2 pp 354ndash369 2001
[13] B Wang J Takatsubo Y Akimune and H Tsuda ldquoDevel-opment of a remote impact damage identification systemrdquoStructural Control and Health Monitoring vol 12 no 3-4 pp301ndash314 2005
[14] Z Su L Ye and Y Lu ldquoGuided Lamb waves for identificationof damage in composite structures a reviewrdquo Journal of Soundand Vibration vol 295 no 3ndash5 pp 753ndash780 2006
[15] T Kundu S Das and K V Jata ldquoPoint of impact predictionin isotropic and anisotropic plates from the acoustic emissiondatardquo Journal of the Acoustical Society of America vol 122 no4 pp 2057ndash2066 2007
[16] T Kundu S Das and K V Jata ldquoDetection of the point ofimpact on a stiffened plate by the acoustic emission techniquerdquoSmartMaterials and Structures vol 18 no 3 Article ID 0350062009
[17] F Ciampa and M Meo ldquoAcoustic emission source localizationand velocity determination of the fundamental mode A
0using
wavelet analysis and a newton-based optimization techniquerdquoSmart Materials and Structures vol 19 no 4 Article ID 0450272010
[18] S Salamone I Bartoli P di Leo et al ldquoHigh-velocity impactlocation on aircraft panels using macro-fiber composite piezo-electric rosettesrdquo Journal of Intelligent Material Systems andStructures vol 21 no 9 pp 887ndash896 2010
[19] A Perelli L de Marchi A Marzani and N Speciale ldquoAcousticemission localization in plates with dispersion and reverber-ations using sparse PZT sensors in passive moderdquo SmartMaterials and Structures vol 21 no 2 Article ID 025010 2012
[20] E D Niri A Farhidzadeh and S Salamone ldquoNonlinear kalmanfiltering for acoustic emission source localization in anisotropicpanelsrdquo Ultrasonics 2013
[21] A Liverani and A Ceruti ldquoInteractive GT code managementfor mechanical part similarity search and cost predictionrdquoComputer-Aided Design and Applications vol 7 no 1 pp 1ndash152010
[22] A Liverani A Ceruti and G Caligiana ldquoTablet-based 3Dsketching and curve reverse modellingrdquo International Journalof Computer Aided Engineering and Technology vol 5 no 2-32013
[23] S Debernardis M Fiorentino M Gattullo G Monno and AE Uva ldquoText readability in head-worn displays color and styleoptimization in video vs optical see-through devicesrdquo IEEETransactions on Visualization and Computer Graphics vol PPno 99 p 1 2013
[24] F Zhou H B-L Dun and M Billinghurst ldquoTrends in aug-mented reality tracking interaction and display a review of tenyears of ISMARrdquo in Proceedings of the 7th IEEE InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo08) pp193ndash202 Cambridge UK September 2008
[25] GWelch and E Foxlin ldquoMotion tracking no silver bullet but arespectable arsenalrdquo IEEE Computer Graphics and Applicationsvol 22 no 6 pp 24ndash38 2002
[26] M Pressigout and E Marchand ldquoHybrid tracking algorithmsfor planar and non-planar structures subject to illuminationchangesrdquo in Proceedings of the 5th IEEE and ACM InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo06)pp 52ndash55 IEEE Computer Society Santa Barbara Calif USAOctober 2006
10 Journal of Sensors
[27] P P Valentini and E Pezzuti ldquoInteractive multibody simula-tion in augmented realityrdquo Journal of Theoretical and AppliedMechanics vol 48 no 3 pp 733ndash750 2010
[28] A David and P Jean Computer Vision A Modern Approach2002
[29] HWu Z Cai and YWang ldquoVision-based auxiliary navigationmethod using augmented reality for unmanned aerial vehiclesrdquoin Proceedings of the 10th IEEE International Conference onIndustrial Informatics (INDIN rsquo12) pp 520ndash525 Beijing ChinaJuly 2012
[30] S Yuen G Yaoyuneyong and E Johnson ldquoAugmented realityan overview and five directions for ar in educationrdquo Journal ofEducational Technology Development and Exchange vol 4 no1 pp 2119ndash2140 2011
[31] D Marquardt ldquoAn algorithm for least-squares estimation ofnonlinear parametersrdquo Journal of the Society For Industrial andApplied Mathematics vol 11 no 2 pp 431ndash441 1963
[32] S Caporale L de Marchi and N Speciale ldquoFrequency warpingbiorthogonal framesrdquo IEEE Transactions on Signal Processingvol 59 no 6 pp 2575ndash2584 2011
[33] httpwwwhitlwashingtoneduartoolkit[34] httpwwwvuzixcomaugmented-realityproducts star1200
html[35] P Bocchini A Marzani and E Viola ldquoGraphical user interface
for guided acoustic wavesrdquo Journal of Computing in CivilEngineering vol 25 no 3 pp 202ndash210 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Sensors 5
uncertainty due to the imperfect knowledge of the materialproperties of the plate the limited sampling frequency andthe unavoidable presence of noise in the measurements Suchuncertainty is strictly related to the sensor topology and itslower bound that is the minimum theoretical estimationerror of the source positions can be estimated by using theCramer-Rao algorithm
Considering 119898 = 3 DDOP measurements the Cramer-Rao value for a point 119901 equiv 119909
119901 119910119901 on the plate is calculated
as
120575cr (119909119901 119910119901) = [C119879A119879 sdot (A sdot R sdot A119879)minus1
sdot AC]minus1
(9)
C is the119898 times 2matrix whose elements are
1198621198941=
1
119888119908
119909119901minus 119909119894
radic(119909119901minus 119909119894)2
+ (119910119901minus 119910119894)2
1198621198942=
1
119888119908
119910119901minus 119910119894
radic(119909119901minus 119909119894)2
+ (119910119901minus 119910119894)2
(10)
where 119888119908
= 119870 sdot 119891119904is the equivalent wave speed obtained
through the time distance mapping described in the warpingprocedure 119870 is the warping map normalization parameterand 119891
119904is the considered sampling frequency
A is the full-rank (119898 minus 1) times 119898matrix
A = [1 minus1 0
1 0 minus1] (11)
R is a 119898 times 119898 diagonal matrix which represents theerror in the measurements The measurement errors areconsidered as independent identically distributed Gaussianrandom variables with zero mean and standard deviation120590119889= 2119888119908119891119904 so that the nonnull elements of R are equal to
1205902
119889
34 Impact Energy Estimation Because of the acousticenergy confinement in the waveguide Lamb waves expe-rience a low attenuation with distance In particular theacquired signal amplitude is inversely proportional to thesquared root of the distance of propagation The estimationof impact energy deserves attention since it can be related tothe level of damage in the component Since the WFT is aunitary transform which preserves the energy of the signal[19] the impact energy 119864
119901can be estimated from the energy
of the warped signals as
119864119901= 119896119864
3
sum
119894=0
int
119905
0
119904119908119894(119905 119863119894)2d119905 (12)
where 119904119908119894(119905 119863119894) with 119894 isin 1 2 3 are the warped versions
of the signals acquired by the three sensors and 119896119864is a
calibration constant
Table 1 Sensor topology
PZT-1 PZT-2 PZT-3119909119894[mm] 250 250 750
119910119894[mm] 250 750 250
4 Impact Data Visualization in AR
Hardware and software settings and testing procedures usedin this work to visualize the outcomes of the impact detectionmethodology in AR are described in the following
An aluminum 1050A square plate 1000mm times 1000mmand 3mm thick was considered (see Figure 3) The nominalproperties considered for the plate are Youngrsquos modulus 119864 =
69GPa Poissonrsquos coefficient ] = 03 andmaterial density 120588 =
2700 kgm3 Three piezoelectric sensors (PZT discs PIC181diameter 10mm thickness 1mm) were bonded to the platesurface at positions reported in Table 1
In this study a vision-based tracking technique isadopted Such approach is usually preferred to sensor-basedtechniques in internal applications due to its higher precisionand easier hardware implementation To such purpose themarker of Figure 1(b) is fixed on the plate at the 119909 119910 = 0 0
mm coordinates The marker has been simply sketched withgraphical software and printed on a paper sheet Differentmarker shapes could be used provided they are asymmetricblack and white and easily recognizable by the AR softwareThe tracking is performed by means of the AR toolkitan available library for augmented reality shared by theUniversity of Washington [33] The AR toolkit is used todetect the marker to measure the image distortion and torelate in time the marker reference system to the image
The experimenter wears a pair of Vuzix STAR 1200 glasses(see Figure 1(a)) a see-trough device specifically designedfor AR applications [34] These glasses include a camera inthe front and two miniaturized projectors displaying imageson the transparent lenses two USB plugs connect the Vuzixglasses with a notebook or a PCThe resolution of the cameraof this see-through glasses can be changed up to 1920 times
1080 pixels and the two projectors support video displayresolutions up to 1280 times 720 At first an image in which themarker is framed with a preset distance and pose (knownposition) of the Vuzix glasses camera is taken the AR toolkitmacros automatically detect the marker in the image andperforms the Calibration computing 120574 (the other camerafeatures are generally known)
The experimenter strikes the plate with the instrumentedhammer (PCB Piezotronics) used to simulate impacts andthe guided waves are signals gathered by the sensors throughan oscilloscope (LC534 series LeCroy) at a sampling fre-quency of 119891
119904= 300 kHz Acquisitions are triggered when the
signal received from one of the sensors reaches a thresholdlevel of 140mV pretrigger recording is enabled to obtainthe previous history of each signal The detected waveformsare directly processed in a PC to find the position 119909
119901 119910119901
position uncertainty 120575cr and energy 119864119901of the impact Such
data are passed to the AR algorithm for the final visualization
6 Journal of Sensors
PC for impactdetection (positionuncertainty and energy)and image processing(AR toolkit software)
Wuzix glasses
Marker
hammer
MarkerOscilloscope connected via GPIB to the PC
PZT-1
PZT-1PZT-2
PZT-3
Instrumented impact
Y
XO
Figure 3 Experimental setup for impact localization and highlight of PZT-1 placed at 119909 119910 = 250 250mm and the marker placed atcorner 119909 119910 = 0 0mm
(a) (b) (c)
(d) (e) (f)
Figure 4 Image analysis image acquired by Vuzix camera (a) thresholded image (b) connection of pixel to detect objects (c) contoursdetection (d) marker edges detection and pose estimation (e) and impact point detection in AR (f)
During tracking each frame acquired by the glassesrsquocamera is processed by the AR toolkit software followingthese steps application of threshold detection of connectedobjects detection of objects contours detection of markeredges computation of image distance and pose with respectto the camera reference system by the evaluation of the
marker distortion and projection of the impact point coor-dinates 119909
119901 119910119901 on the image in terms of 119906 and V
Finally a designed virtual symbol or image centered inthe right position (119906 and V) can be projected to the realworld image in real time (see Figure 4) exploiting the glassesprojectors
Journal of Sensors 7y
(m)
x (m)
6070
4060
50 60 70
3040
405060
70
304060 50
506070
40507080
506070
30
30 3030
30
30
20
20
20
20
20
2020
40
40
4040
10
10
10
10
50
6040
60
PZT-1
PZT-2
PZT-3
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
80
80
80
5070
80
80
8080
Figure 5 Cramer-Rao lower bound expressed in [mm]
Themarker detection procedure does not require that theexperimentersrsquo point of view is perpendicular to the surfaceon which the marker lies so that the experimenter can viewthe impact point from several points of view rotating the headin a natural way
5 Results of the Case Study
51 Impact Location Estimation To process the acquiredsignals with the WFT first a guided mode must be selectedand its warpingmap119908(119891) is designed Here the fundamentalmode 119860
0was selected since the contribution of 119860
0in the
signal is expected to be much more relevant than the oneof 1198780for two main reasons (i) the wavelength tuning effect
imposed by the sensorsplate properties filters out most ofthe 1198780wave (ii) due to the out-of-plane excitation the energy
in the 1198600mode is considerably greater than that retained
by the 1198780mode Therefore the group velocity curve of the
1198600mode was predicted [35] used to compute the warping
map 119908(119891) and the normalization parameter 119870 as well as theproper Frequency Warping operator W
119908 At this point for
the given coordinates of the transducers 119909119894 119910119894 the selected
sampling frequency119891119904 and the parameter119870 theCramer-Rao
lower bound was computed for each point of the plate andrepresented in Figure 5 as a contour plot
Then the plate was impacted the signals acquired andthe cross-correlation (Xcorr) of thewarped signals computedFor instance the Xcorr between 119904
1199081(119905 1198631) and 119904
1199082(119905 1198632) for
an impact 119909119901
= 395mm and 119910119901
= 554mm is depictedin Figure 6(a) together with its envelope computed as themodulus of the Hilbert Transform Similarly in Figure 6(b)is shown the Xcorr and its envelope for 119904
1199081(119905 1198631) and
1199041199083(119905 1198633)
As can be seen the abscissas of envelope maxima corre-spond to the actual difference in distance of propagation Δ
12
and Δ13 respectively Similar accuracy was obtained for Δ
23
not shown in Figure 6 Such DDOP define the hyperbolasused to estimate the impact position
Such approach was used next to locate 18 impacts onthe plate surface The results of the proposed procedure canbe seen in Figure 7 where the crosses denote the positionswhere the plate has been impacted the centre of the circlesthe impact positions estimated by the proposed procedureand whereas the circlesrsquo radii were set equal to the valueof 120575cr(119909119901 119910119901) for the estimated impact position It is worthnoting how the circles always surround the true impactpositions
52 Impact Energy Estimation The impact energy 119864119901for
the 18 different impacts considered was estimated as detailedin Section 34 and represented in Figure 8 as small circlesSuch estimated impact energies were compared with thosemeasured by the instrumented hammer 119864
ℎ In particular
119864ℎwas computed as the squared value of the velocity time-
history obtained by integrating the acceleration time-historyregistered by the instrumented hammer As can be seen avery good agreement between the two quantities was foundthus verifying that an efficient impact energy estimation canbe performed from warped waveforms 119904
119908119894 The discrepancy
in the energy estimation that appears in cases 10 and 14 maybe due to several factors such as the suboptimal selectionof the calibration constant 119896
119864 or the jamming effect due
to edge reflections Most likely the discrepancy is due tothe difference in the frequency response between the impacthammer (which acts as low pass filter in the 0ndash4 kHz range)and the piezoelectric sensors (which have a much broaderfrequency response)
53 AR Visualization Following the descried AR approachthe experimenter wears a pair of AR glasses and frames boththe marker and the zone in which the impact is applied Thealuminum panel is hit with the hammer the impact detectionprocedure starts and the estimated coordinates of the impactpoint with respect to the marker system 119909
119898= 119909119901minus Δ119909and
119910119898= 119910119901minusΔ119910are passed to the visualization algorithm along
with the 120575cr and 119864119901As shown in Figure 9 a symbol formed by three squares
has been designed to represent the data obtained from theimpact methodology the centre of the red square showsthe estimated impact position 119909
119901 119910119901 the side length of
the green square denotes the uncertainty in the estimatedposition 120575cr(119909119901 119910119901) whereas the yellow square denotes thestrength of the impact a yellow square close to the red squaremeans low energy 119864
119901asymp 0 while a yellow square close to the
green square means high energy 119864119901asymp 1 The experimenter
can thus visually evaluate the energy at the impact in anintuitive way Figure 9 shows the view through the glasseslenses after the augmentation
8 Journal of Sensors
Difference in distance of propagation (DDOP) (m)
Envelope
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
XcorrActual Δ12
sw1 and sw2
(a)
Difference in distance of propagation (DDOP) (m)
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
Envelope
XcorrActual Δ13
sw1 and sw3
(b)
Figure 6 Cross-correlated warped signals and their envelope obtained as the modulus of the Hilbert Transform for an impact at position119909119901= 395mm and 119910
119901= 554mm
03 04 05 06 07 0802
025
03
035
04
045
05
055
06
065
07
31 2
5
11 12
9
14 15
17 18
6 7 8
4
10
16
13
x (m)
y(m
)
Figure 7 Localization results for the 18 impacts denoted by thesmall numbers crosses denote the true impact positions the centreof the circles the estimated impact positions 119909
119901 119910119901 and the radii
of the circles is taken equal to 120575cr(119909119901 119910119901)
6 Conclusions
In this work an augmented reality (AR) strategy is proposedto visualize on plate-like structures the outcomes of an impactdetectionmethodology In particular the impact position andenergy are considered To such aim first previous contribu-tions of the authors devoted to signal processing strategiesfor impact localization are exploited and extended to theestimation of the impact energy The experimental resultson an isotropic plate show the accuracy of the methodologyon both impact location and energy estimation Next as anew original contribution to the research the visualization inaugmented reality (AR) of impact position uncertainty andimpact energy is provided The experimental results show
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
08
09
1
Impact number
Nor
mal
ized
ener
gy (a
u)
EhammerEwarped signals
Figure 8 Energy estimation results for the 18 impacts considered
Figure 9 Image on the Vuzix glasses the impact indicator issuperimposed to the external real-world image
how such data can be viewed by the experimenter in real-timedirectly overimposed on the structure
The proposed strategy shows good potential to be used indamage detection andmaintenance operations In fact beside
Journal of Sensors 9
the precise and low computational cost for impact detection(position and energy) it can ease the maintenance practicesince data can be presented directly on the component tomonitor in an effective and intuitive wayThe AR is preferredto the Virtual Reality since the augmented scene is obtainedby adding virtual objects to the real-world eyesight mitigat-ing thus the unphysical feeling that the end-user experiencefrom a complete virtual approach while still supporting himduring the operations in the real-world environment
Further studies are needed to assess the reliability of theproposed technology and the applicability to more complexstructures (eg stiffened plates) and to anisotropic materials
Conflict of Interests
The authors did not receive any financial support from thecommercial identities mentioned in the work The authorsdeclare that there is no conflict of interests regarding thepublication of this paper
References
[1] httpsenwikipediaorgwikiaugmented reality[2] R T Azuma ldquoA survey of augmented realityrdquo Presence vol 6
no 4 pp 355ndash385 1997[3] R Azuma Y Baillot R Behringer S Feiner S Julier and
B MacIntyre ldquoRecent advances in augmented realityrdquo IEEEComputer Graphics and Applications vol 21 no 6 pp 34ndash472001
[4] D Krevelen and R Poleman ldquoA survey of augmented realitytechnologies applications and limitationsrdquo The InternationalJournal of Virtual Reality vol 9 no 2 pp 1ndash20 2010
[5] X Wang M J Kim P E Love and S C Kang ldquoAugmentedreality in built environment classification and implications forfuture researchrdquo Automation in Construction vol 32 pp 1ndash132013
[6] H L Chi S C Kang and X Wang ldquoResearch trends andopportunities of augmented reality applications in architectureengineering and constructionrdquo Automation in Constructionvol 33 pp 116ndash122 2013
[7] S Benbelkacem M Belhocine A Bellarbi N Zenati-Hendaand M Tadjine ldquoAugmented reality for photovoltaic pumpingsystemsmaintenance tasksrdquoRenewable Energy vol 55 pp 428ndash437 2013
[8] J M Antonio S R J Luis and S P Faustino ldquoAugmented andvirtual reality techniques for footwearrdquo Computers in Industry2013
[9] A Farhidzadeh E Dehghan-Niri A Moustafa S Salamoneand A Whittaker ldquoDamage assessment of reinforced concretestructures using fractal analysis of residual crack patternsrdquoExperimental Mechanics pp 1ndash13 2012
[10] B Koo H Choi and T Shon ldquoWiva Wsn monitoringframework based on 3D visualization and augmented realityin mobile devicesrdquo in Ambient Assistive Health and WellnessManagement in the Heart of the City M Mokhtari I KhalilJ Bauchet D Zhang and C Nugent Eds vol 5597 ofLecture Notes in Computer Science pp 158ndash165 Springer BerlinGermany 2009
[11] J L Rose Ultrasonic Waves in Solid Media Cambridge Univer-sity Press 1999
[12] R Seydel and F-K Chang ldquoImpact identification of stiffenedcomposite panels I System developmentrdquo Smart Materials andStructures vol 10 no 2 pp 354ndash369 2001
[13] B Wang J Takatsubo Y Akimune and H Tsuda ldquoDevel-opment of a remote impact damage identification systemrdquoStructural Control and Health Monitoring vol 12 no 3-4 pp301ndash314 2005
[14] Z Su L Ye and Y Lu ldquoGuided Lamb waves for identificationof damage in composite structures a reviewrdquo Journal of Soundand Vibration vol 295 no 3ndash5 pp 753ndash780 2006
[15] T Kundu S Das and K V Jata ldquoPoint of impact predictionin isotropic and anisotropic plates from the acoustic emissiondatardquo Journal of the Acoustical Society of America vol 122 no4 pp 2057ndash2066 2007
[16] T Kundu S Das and K V Jata ldquoDetection of the point ofimpact on a stiffened plate by the acoustic emission techniquerdquoSmartMaterials and Structures vol 18 no 3 Article ID 0350062009
[17] F Ciampa and M Meo ldquoAcoustic emission source localizationand velocity determination of the fundamental mode A
0using
wavelet analysis and a newton-based optimization techniquerdquoSmart Materials and Structures vol 19 no 4 Article ID 0450272010
[18] S Salamone I Bartoli P di Leo et al ldquoHigh-velocity impactlocation on aircraft panels using macro-fiber composite piezo-electric rosettesrdquo Journal of Intelligent Material Systems andStructures vol 21 no 9 pp 887ndash896 2010
[19] A Perelli L de Marchi A Marzani and N Speciale ldquoAcousticemission localization in plates with dispersion and reverber-ations using sparse PZT sensors in passive moderdquo SmartMaterials and Structures vol 21 no 2 Article ID 025010 2012
[20] E D Niri A Farhidzadeh and S Salamone ldquoNonlinear kalmanfiltering for acoustic emission source localization in anisotropicpanelsrdquo Ultrasonics 2013
[21] A Liverani and A Ceruti ldquoInteractive GT code managementfor mechanical part similarity search and cost predictionrdquoComputer-Aided Design and Applications vol 7 no 1 pp 1ndash152010
[22] A Liverani A Ceruti and G Caligiana ldquoTablet-based 3Dsketching and curve reverse modellingrdquo International Journalof Computer Aided Engineering and Technology vol 5 no 2-32013
[23] S Debernardis M Fiorentino M Gattullo G Monno and AE Uva ldquoText readability in head-worn displays color and styleoptimization in video vs optical see-through devicesrdquo IEEETransactions on Visualization and Computer Graphics vol PPno 99 p 1 2013
[24] F Zhou H B-L Dun and M Billinghurst ldquoTrends in aug-mented reality tracking interaction and display a review of tenyears of ISMARrdquo in Proceedings of the 7th IEEE InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo08) pp193ndash202 Cambridge UK September 2008
[25] GWelch and E Foxlin ldquoMotion tracking no silver bullet but arespectable arsenalrdquo IEEE Computer Graphics and Applicationsvol 22 no 6 pp 24ndash38 2002
[26] M Pressigout and E Marchand ldquoHybrid tracking algorithmsfor planar and non-planar structures subject to illuminationchangesrdquo in Proceedings of the 5th IEEE and ACM InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo06)pp 52ndash55 IEEE Computer Society Santa Barbara Calif USAOctober 2006
10 Journal of Sensors
[27] P P Valentini and E Pezzuti ldquoInteractive multibody simula-tion in augmented realityrdquo Journal of Theoretical and AppliedMechanics vol 48 no 3 pp 733ndash750 2010
[28] A David and P Jean Computer Vision A Modern Approach2002
[29] HWu Z Cai and YWang ldquoVision-based auxiliary navigationmethod using augmented reality for unmanned aerial vehiclesrdquoin Proceedings of the 10th IEEE International Conference onIndustrial Informatics (INDIN rsquo12) pp 520ndash525 Beijing ChinaJuly 2012
[30] S Yuen G Yaoyuneyong and E Johnson ldquoAugmented realityan overview and five directions for ar in educationrdquo Journal ofEducational Technology Development and Exchange vol 4 no1 pp 2119ndash2140 2011
[31] D Marquardt ldquoAn algorithm for least-squares estimation ofnonlinear parametersrdquo Journal of the Society For Industrial andApplied Mathematics vol 11 no 2 pp 431ndash441 1963
[32] S Caporale L de Marchi and N Speciale ldquoFrequency warpingbiorthogonal framesrdquo IEEE Transactions on Signal Processingvol 59 no 6 pp 2575ndash2584 2011
[33] httpwwwhitlwashingtoneduartoolkit[34] httpwwwvuzixcomaugmented-realityproducts star1200
html[35] P Bocchini A Marzani and E Viola ldquoGraphical user interface
for guided acoustic wavesrdquo Journal of Computing in CivilEngineering vol 25 no 3 pp 202ndash210 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Journal of Sensors
PC for impactdetection (positionuncertainty and energy)and image processing(AR toolkit software)
Wuzix glasses
Marker
hammer
MarkerOscilloscope connected via GPIB to the PC
PZT-1
PZT-1PZT-2
PZT-3
Instrumented impact
Y
XO
Figure 3 Experimental setup for impact localization and highlight of PZT-1 placed at 119909 119910 = 250 250mm and the marker placed atcorner 119909 119910 = 0 0mm
(a) (b) (c)
(d) (e) (f)
Figure 4 Image analysis image acquired by Vuzix camera (a) thresholded image (b) connection of pixel to detect objects (c) contoursdetection (d) marker edges detection and pose estimation (e) and impact point detection in AR (f)
During tracking each frame acquired by the glassesrsquocamera is processed by the AR toolkit software followingthese steps application of threshold detection of connectedobjects detection of objects contours detection of markeredges computation of image distance and pose with respectto the camera reference system by the evaluation of the
marker distortion and projection of the impact point coor-dinates 119909
119901 119910119901 on the image in terms of 119906 and V
Finally a designed virtual symbol or image centered inthe right position (119906 and V) can be projected to the realworld image in real time (see Figure 4) exploiting the glassesprojectors
Journal of Sensors 7y
(m)
x (m)
6070
4060
50 60 70
3040
405060
70
304060 50
506070
40507080
506070
30
30 3030
30
30
20
20
20
20
20
2020
40
40
4040
10
10
10
10
50
6040
60
PZT-1
PZT-2
PZT-3
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
80
80
80
5070
80
80
8080
Figure 5 Cramer-Rao lower bound expressed in [mm]
Themarker detection procedure does not require that theexperimentersrsquo point of view is perpendicular to the surfaceon which the marker lies so that the experimenter can viewthe impact point from several points of view rotating the headin a natural way
5 Results of the Case Study
51 Impact Location Estimation To process the acquiredsignals with the WFT first a guided mode must be selectedand its warpingmap119908(119891) is designed Here the fundamentalmode 119860
0was selected since the contribution of 119860
0in the
signal is expected to be much more relevant than the oneof 1198780for two main reasons (i) the wavelength tuning effect
imposed by the sensorsplate properties filters out most ofthe 1198780wave (ii) due to the out-of-plane excitation the energy
in the 1198600mode is considerably greater than that retained
by the 1198780mode Therefore the group velocity curve of the
1198600mode was predicted [35] used to compute the warping
map 119908(119891) and the normalization parameter 119870 as well as theproper Frequency Warping operator W
119908 At this point for
the given coordinates of the transducers 119909119894 119910119894 the selected
sampling frequency119891119904 and the parameter119870 theCramer-Rao
lower bound was computed for each point of the plate andrepresented in Figure 5 as a contour plot
Then the plate was impacted the signals acquired andthe cross-correlation (Xcorr) of thewarped signals computedFor instance the Xcorr between 119904
1199081(119905 1198631) and 119904
1199082(119905 1198632) for
an impact 119909119901
= 395mm and 119910119901
= 554mm is depictedin Figure 6(a) together with its envelope computed as themodulus of the Hilbert Transform Similarly in Figure 6(b)is shown the Xcorr and its envelope for 119904
1199081(119905 1198631) and
1199041199083(119905 1198633)
As can be seen the abscissas of envelope maxima corre-spond to the actual difference in distance of propagation Δ
12
and Δ13 respectively Similar accuracy was obtained for Δ
23
not shown in Figure 6 Such DDOP define the hyperbolasused to estimate the impact position
Such approach was used next to locate 18 impacts onthe plate surface The results of the proposed procedure canbe seen in Figure 7 where the crosses denote the positionswhere the plate has been impacted the centre of the circlesthe impact positions estimated by the proposed procedureand whereas the circlesrsquo radii were set equal to the valueof 120575cr(119909119901 119910119901) for the estimated impact position It is worthnoting how the circles always surround the true impactpositions
52 Impact Energy Estimation The impact energy 119864119901for
the 18 different impacts considered was estimated as detailedin Section 34 and represented in Figure 8 as small circlesSuch estimated impact energies were compared with thosemeasured by the instrumented hammer 119864
ℎ In particular
119864ℎwas computed as the squared value of the velocity time-
history obtained by integrating the acceleration time-historyregistered by the instrumented hammer As can be seen avery good agreement between the two quantities was foundthus verifying that an efficient impact energy estimation canbe performed from warped waveforms 119904
119908119894 The discrepancy
in the energy estimation that appears in cases 10 and 14 maybe due to several factors such as the suboptimal selectionof the calibration constant 119896
119864 or the jamming effect due
to edge reflections Most likely the discrepancy is due tothe difference in the frequency response between the impacthammer (which acts as low pass filter in the 0ndash4 kHz range)and the piezoelectric sensors (which have a much broaderfrequency response)
53 AR Visualization Following the descried AR approachthe experimenter wears a pair of AR glasses and frames boththe marker and the zone in which the impact is applied Thealuminum panel is hit with the hammer the impact detectionprocedure starts and the estimated coordinates of the impactpoint with respect to the marker system 119909
119898= 119909119901minus Δ119909and
119910119898= 119910119901minusΔ119910are passed to the visualization algorithm along
with the 120575cr and 119864119901As shown in Figure 9 a symbol formed by three squares
has been designed to represent the data obtained from theimpact methodology the centre of the red square showsthe estimated impact position 119909
119901 119910119901 the side length of
the green square denotes the uncertainty in the estimatedposition 120575cr(119909119901 119910119901) whereas the yellow square denotes thestrength of the impact a yellow square close to the red squaremeans low energy 119864
119901asymp 0 while a yellow square close to the
green square means high energy 119864119901asymp 1 The experimenter
can thus visually evaluate the energy at the impact in anintuitive way Figure 9 shows the view through the glasseslenses after the augmentation
8 Journal of Sensors
Difference in distance of propagation (DDOP) (m)
Envelope
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
XcorrActual Δ12
sw1 and sw2
(a)
Difference in distance of propagation (DDOP) (m)
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
Envelope
XcorrActual Δ13
sw1 and sw3
(b)
Figure 6 Cross-correlated warped signals and their envelope obtained as the modulus of the Hilbert Transform for an impact at position119909119901= 395mm and 119910
119901= 554mm
03 04 05 06 07 0802
025
03
035
04
045
05
055
06
065
07
31 2
5
11 12
9
14 15
17 18
6 7 8
4
10
16
13
x (m)
y(m
)
Figure 7 Localization results for the 18 impacts denoted by thesmall numbers crosses denote the true impact positions the centreof the circles the estimated impact positions 119909
119901 119910119901 and the radii
of the circles is taken equal to 120575cr(119909119901 119910119901)
6 Conclusions
In this work an augmented reality (AR) strategy is proposedto visualize on plate-like structures the outcomes of an impactdetectionmethodology In particular the impact position andenergy are considered To such aim first previous contribu-tions of the authors devoted to signal processing strategiesfor impact localization are exploited and extended to theestimation of the impact energy The experimental resultson an isotropic plate show the accuracy of the methodologyon both impact location and energy estimation Next as anew original contribution to the research the visualization inaugmented reality (AR) of impact position uncertainty andimpact energy is provided The experimental results show
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
08
09
1
Impact number
Nor
mal
ized
ener
gy (a
u)
EhammerEwarped signals
Figure 8 Energy estimation results for the 18 impacts considered
Figure 9 Image on the Vuzix glasses the impact indicator issuperimposed to the external real-world image
how such data can be viewed by the experimenter in real-timedirectly overimposed on the structure
The proposed strategy shows good potential to be used indamage detection andmaintenance operations In fact beside
Journal of Sensors 9
the precise and low computational cost for impact detection(position and energy) it can ease the maintenance practicesince data can be presented directly on the component tomonitor in an effective and intuitive wayThe AR is preferredto the Virtual Reality since the augmented scene is obtainedby adding virtual objects to the real-world eyesight mitigat-ing thus the unphysical feeling that the end-user experiencefrom a complete virtual approach while still supporting himduring the operations in the real-world environment
Further studies are needed to assess the reliability of theproposed technology and the applicability to more complexstructures (eg stiffened plates) and to anisotropic materials
Conflict of Interests
The authors did not receive any financial support from thecommercial identities mentioned in the work The authorsdeclare that there is no conflict of interests regarding thepublication of this paper
References
[1] httpsenwikipediaorgwikiaugmented reality[2] R T Azuma ldquoA survey of augmented realityrdquo Presence vol 6
no 4 pp 355ndash385 1997[3] R Azuma Y Baillot R Behringer S Feiner S Julier and
B MacIntyre ldquoRecent advances in augmented realityrdquo IEEEComputer Graphics and Applications vol 21 no 6 pp 34ndash472001
[4] D Krevelen and R Poleman ldquoA survey of augmented realitytechnologies applications and limitationsrdquo The InternationalJournal of Virtual Reality vol 9 no 2 pp 1ndash20 2010
[5] X Wang M J Kim P E Love and S C Kang ldquoAugmentedreality in built environment classification and implications forfuture researchrdquo Automation in Construction vol 32 pp 1ndash132013
[6] H L Chi S C Kang and X Wang ldquoResearch trends andopportunities of augmented reality applications in architectureengineering and constructionrdquo Automation in Constructionvol 33 pp 116ndash122 2013
[7] S Benbelkacem M Belhocine A Bellarbi N Zenati-Hendaand M Tadjine ldquoAugmented reality for photovoltaic pumpingsystemsmaintenance tasksrdquoRenewable Energy vol 55 pp 428ndash437 2013
[8] J M Antonio S R J Luis and S P Faustino ldquoAugmented andvirtual reality techniques for footwearrdquo Computers in Industry2013
[9] A Farhidzadeh E Dehghan-Niri A Moustafa S Salamoneand A Whittaker ldquoDamage assessment of reinforced concretestructures using fractal analysis of residual crack patternsrdquoExperimental Mechanics pp 1ndash13 2012
[10] B Koo H Choi and T Shon ldquoWiva Wsn monitoringframework based on 3D visualization and augmented realityin mobile devicesrdquo in Ambient Assistive Health and WellnessManagement in the Heart of the City M Mokhtari I KhalilJ Bauchet D Zhang and C Nugent Eds vol 5597 ofLecture Notes in Computer Science pp 158ndash165 Springer BerlinGermany 2009
[11] J L Rose Ultrasonic Waves in Solid Media Cambridge Univer-sity Press 1999
[12] R Seydel and F-K Chang ldquoImpact identification of stiffenedcomposite panels I System developmentrdquo Smart Materials andStructures vol 10 no 2 pp 354ndash369 2001
[13] B Wang J Takatsubo Y Akimune and H Tsuda ldquoDevel-opment of a remote impact damage identification systemrdquoStructural Control and Health Monitoring vol 12 no 3-4 pp301ndash314 2005
[14] Z Su L Ye and Y Lu ldquoGuided Lamb waves for identificationof damage in composite structures a reviewrdquo Journal of Soundand Vibration vol 295 no 3ndash5 pp 753ndash780 2006
[15] T Kundu S Das and K V Jata ldquoPoint of impact predictionin isotropic and anisotropic plates from the acoustic emissiondatardquo Journal of the Acoustical Society of America vol 122 no4 pp 2057ndash2066 2007
[16] T Kundu S Das and K V Jata ldquoDetection of the point ofimpact on a stiffened plate by the acoustic emission techniquerdquoSmartMaterials and Structures vol 18 no 3 Article ID 0350062009
[17] F Ciampa and M Meo ldquoAcoustic emission source localizationand velocity determination of the fundamental mode A
0using
wavelet analysis and a newton-based optimization techniquerdquoSmart Materials and Structures vol 19 no 4 Article ID 0450272010
[18] S Salamone I Bartoli P di Leo et al ldquoHigh-velocity impactlocation on aircraft panels using macro-fiber composite piezo-electric rosettesrdquo Journal of Intelligent Material Systems andStructures vol 21 no 9 pp 887ndash896 2010
[19] A Perelli L de Marchi A Marzani and N Speciale ldquoAcousticemission localization in plates with dispersion and reverber-ations using sparse PZT sensors in passive moderdquo SmartMaterials and Structures vol 21 no 2 Article ID 025010 2012
[20] E D Niri A Farhidzadeh and S Salamone ldquoNonlinear kalmanfiltering for acoustic emission source localization in anisotropicpanelsrdquo Ultrasonics 2013
[21] A Liverani and A Ceruti ldquoInteractive GT code managementfor mechanical part similarity search and cost predictionrdquoComputer-Aided Design and Applications vol 7 no 1 pp 1ndash152010
[22] A Liverani A Ceruti and G Caligiana ldquoTablet-based 3Dsketching and curve reverse modellingrdquo International Journalof Computer Aided Engineering and Technology vol 5 no 2-32013
[23] S Debernardis M Fiorentino M Gattullo G Monno and AE Uva ldquoText readability in head-worn displays color and styleoptimization in video vs optical see-through devicesrdquo IEEETransactions on Visualization and Computer Graphics vol PPno 99 p 1 2013
[24] F Zhou H B-L Dun and M Billinghurst ldquoTrends in aug-mented reality tracking interaction and display a review of tenyears of ISMARrdquo in Proceedings of the 7th IEEE InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo08) pp193ndash202 Cambridge UK September 2008
[25] GWelch and E Foxlin ldquoMotion tracking no silver bullet but arespectable arsenalrdquo IEEE Computer Graphics and Applicationsvol 22 no 6 pp 24ndash38 2002
[26] M Pressigout and E Marchand ldquoHybrid tracking algorithmsfor planar and non-planar structures subject to illuminationchangesrdquo in Proceedings of the 5th IEEE and ACM InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo06)pp 52ndash55 IEEE Computer Society Santa Barbara Calif USAOctober 2006
10 Journal of Sensors
[27] P P Valentini and E Pezzuti ldquoInteractive multibody simula-tion in augmented realityrdquo Journal of Theoretical and AppliedMechanics vol 48 no 3 pp 733ndash750 2010
[28] A David and P Jean Computer Vision A Modern Approach2002
[29] HWu Z Cai and YWang ldquoVision-based auxiliary navigationmethod using augmented reality for unmanned aerial vehiclesrdquoin Proceedings of the 10th IEEE International Conference onIndustrial Informatics (INDIN rsquo12) pp 520ndash525 Beijing ChinaJuly 2012
[30] S Yuen G Yaoyuneyong and E Johnson ldquoAugmented realityan overview and five directions for ar in educationrdquo Journal ofEducational Technology Development and Exchange vol 4 no1 pp 2119ndash2140 2011
[31] D Marquardt ldquoAn algorithm for least-squares estimation ofnonlinear parametersrdquo Journal of the Society For Industrial andApplied Mathematics vol 11 no 2 pp 431ndash441 1963
[32] S Caporale L de Marchi and N Speciale ldquoFrequency warpingbiorthogonal framesrdquo IEEE Transactions on Signal Processingvol 59 no 6 pp 2575ndash2584 2011
[33] httpwwwhitlwashingtoneduartoolkit[34] httpwwwvuzixcomaugmented-realityproducts star1200
html[35] P Bocchini A Marzani and E Viola ldquoGraphical user interface
for guided acoustic wavesrdquo Journal of Computing in CivilEngineering vol 25 no 3 pp 202ndash210 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Sensors 7y
(m)
x (m)
6070
4060
50 60 70
3040
405060
70
304060 50
506070
40507080
506070
30
30 3030
30
30
20
20
20
20
20
2020
40
40
4040
10
10
10
10
50
6040
60
PZT-1
PZT-2
PZT-3
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
80
80
80
5070
80
80
8080
Figure 5 Cramer-Rao lower bound expressed in [mm]
Themarker detection procedure does not require that theexperimentersrsquo point of view is perpendicular to the surfaceon which the marker lies so that the experimenter can viewthe impact point from several points of view rotating the headin a natural way
5 Results of the Case Study
51 Impact Location Estimation To process the acquiredsignals with the WFT first a guided mode must be selectedand its warpingmap119908(119891) is designed Here the fundamentalmode 119860
0was selected since the contribution of 119860
0in the
signal is expected to be much more relevant than the oneof 1198780for two main reasons (i) the wavelength tuning effect
imposed by the sensorsplate properties filters out most ofthe 1198780wave (ii) due to the out-of-plane excitation the energy
in the 1198600mode is considerably greater than that retained
by the 1198780mode Therefore the group velocity curve of the
1198600mode was predicted [35] used to compute the warping
map 119908(119891) and the normalization parameter 119870 as well as theproper Frequency Warping operator W
119908 At this point for
the given coordinates of the transducers 119909119894 119910119894 the selected
sampling frequency119891119904 and the parameter119870 theCramer-Rao
lower bound was computed for each point of the plate andrepresented in Figure 5 as a contour plot
Then the plate was impacted the signals acquired andthe cross-correlation (Xcorr) of thewarped signals computedFor instance the Xcorr between 119904
1199081(119905 1198631) and 119904
1199082(119905 1198632) for
an impact 119909119901
= 395mm and 119910119901
= 554mm is depictedin Figure 6(a) together with its envelope computed as themodulus of the Hilbert Transform Similarly in Figure 6(b)is shown the Xcorr and its envelope for 119904
1199081(119905 1198631) and
1199041199083(119905 1198633)
As can be seen the abscissas of envelope maxima corre-spond to the actual difference in distance of propagation Δ
12
and Δ13 respectively Similar accuracy was obtained for Δ
23
not shown in Figure 6 Such DDOP define the hyperbolasused to estimate the impact position
Such approach was used next to locate 18 impacts onthe plate surface The results of the proposed procedure canbe seen in Figure 7 where the crosses denote the positionswhere the plate has been impacted the centre of the circlesthe impact positions estimated by the proposed procedureand whereas the circlesrsquo radii were set equal to the valueof 120575cr(119909119901 119910119901) for the estimated impact position It is worthnoting how the circles always surround the true impactpositions
52 Impact Energy Estimation The impact energy 119864119901for
the 18 different impacts considered was estimated as detailedin Section 34 and represented in Figure 8 as small circlesSuch estimated impact energies were compared with thosemeasured by the instrumented hammer 119864
ℎ In particular
119864ℎwas computed as the squared value of the velocity time-
history obtained by integrating the acceleration time-historyregistered by the instrumented hammer As can be seen avery good agreement between the two quantities was foundthus verifying that an efficient impact energy estimation canbe performed from warped waveforms 119904
119908119894 The discrepancy
in the energy estimation that appears in cases 10 and 14 maybe due to several factors such as the suboptimal selectionof the calibration constant 119896
119864 or the jamming effect due
to edge reflections Most likely the discrepancy is due tothe difference in the frequency response between the impacthammer (which acts as low pass filter in the 0ndash4 kHz range)and the piezoelectric sensors (which have a much broaderfrequency response)
53 AR Visualization Following the descried AR approachthe experimenter wears a pair of AR glasses and frames boththe marker and the zone in which the impact is applied Thealuminum panel is hit with the hammer the impact detectionprocedure starts and the estimated coordinates of the impactpoint with respect to the marker system 119909
119898= 119909119901minus Δ119909and
119910119898= 119910119901minusΔ119910are passed to the visualization algorithm along
with the 120575cr and 119864119901As shown in Figure 9 a symbol formed by three squares
has been designed to represent the data obtained from theimpact methodology the centre of the red square showsthe estimated impact position 119909
119901 119910119901 the side length of
the green square denotes the uncertainty in the estimatedposition 120575cr(119909119901 119910119901) whereas the yellow square denotes thestrength of the impact a yellow square close to the red squaremeans low energy 119864
119901asymp 0 while a yellow square close to the
green square means high energy 119864119901asymp 1 The experimenter
can thus visually evaluate the energy at the impact in anintuitive way Figure 9 shows the view through the glasseslenses after the augmentation
8 Journal of Sensors
Difference in distance of propagation (DDOP) (m)
Envelope
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
XcorrActual Δ12
sw1 and sw2
(a)
Difference in distance of propagation (DDOP) (m)
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
Envelope
XcorrActual Δ13
sw1 and sw3
(b)
Figure 6 Cross-correlated warped signals and their envelope obtained as the modulus of the Hilbert Transform for an impact at position119909119901= 395mm and 119910
119901= 554mm
03 04 05 06 07 0802
025
03
035
04
045
05
055
06
065
07
31 2
5
11 12
9
14 15
17 18
6 7 8
4
10
16
13
x (m)
y(m
)
Figure 7 Localization results for the 18 impacts denoted by thesmall numbers crosses denote the true impact positions the centreof the circles the estimated impact positions 119909
119901 119910119901 and the radii
of the circles is taken equal to 120575cr(119909119901 119910119901)
6 Conclusions
In this work an augmented reality (AR) strategy is proposedto visualize on plate-like structures the outcomes of an impactdetectionmethodology In particular the impact position andenergy are considered To such aim first previous contribu-tions of the authors devoted to signal processing strategiesfor impact localization are exploited and extended to theestimation of the impact energy The experimental resultson an isotropic plate show the accuracy of the methodologyon both impact location and energy estimation Next as anew original contribution to the research the visualization inaugmented reality (AR) of impact position uncertainty andimpact energy is provided The experimental results show
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
08
09
1
Impact number
Nor
mal
ized
ener
gy (a
u)
EhammerEwarped signals
Figure 8 Energy estimation results for the 18 impacts considered
Figure 9 Image on the Vuzix glasses the impact indicator issuperimposed to the external real-world image
how such data can be viewed by the experimenter in real-timedirectly overimposed on the structure
The proposed strategy shows good potential to be used indamage detection andmaintenance operations In fact beside
Journal of Sensors 9
the precise and low computational cost for impact detection(position and energy) it can ease the maintenance practicesince data can be presented directly on the component tomonitor in an effective and intuitive wayThe AR is preferredto the Virtual Reality since the augmented scene is obtainedby adding virtual objects to the real-world eyesight mitigat-ing thus the unphysical feeling that the end-user experiencefrom a complete virtual approach while still supporting himduring the operations in the real-world environment
Further studies are needed to assess the reliability of theproposed technology and the applicability to more complexstructures (eg stiffened plates) and to anisotropic materials
Conflict of Interests
The authors did not receive any financial support from thecommercial identities mentioned in the work The authorsdeclare that there is no conflict of interests regarding thepublication of this paper
References
[1] httpsenwikipediaorgwikiaugmented reality[2] R T Azuma ldquoA survey of augmented realityrdquo Presence vol 6
no 4 pp 355ndash385 1997[3] R Azuma Y Baillot R Behringer S Feiner S Julier and
B MacIntyre ldquoRecent advances in augmented realityrdquo IEEEComputer Graphics and Applications vol 21 no 6 pp 34ndash472001
[4] D Krevelen and R Poleman ldquoA survey of augmented realitytechnologies applications and limitationsrdquo The InternationalJournal of Virtual Reality vol 9 no 2 pp 1ndash20 2010
[5] X Wang M J Kim P E Love and S C Kang ldquoAugmentedreality in built environment classification and implications forfuture researchrdquo Automation in Construction vol 32 pp 1ndash132013
[6] H L Chi S C Kang and X Wang ldquoResearch trends andopportunities of augmented reality applications in architectureengineering and constructionrdquo Automation in Constructionvol 33 pp 116ndash122 2013
[7] S Benbelkacem M Belhocine A Bellarbi N Zenati-Hendaand M Tadjine ldquoAugmented reality for photovoltaic pumpingsystemsmaintenance tasksrdquoRenewable Energy vol 55 pp 428ndash437 2013
[8] J M Antonio S R J Luis and S P Faustino ldquoAugmented andvirtual reality techniques for footwearrdquo Computers in Industry2013
[9] A Farhidzadeh E Dehghan-Niri A Moustafa S Salamoneand A Whittaker ldquoDamage assessment of reinforced concretestructures using fractal analysis of residual crack patternsrdquoExperimental Mechanics pp 1ndash13 2012
[10] B Koo H Choi and T Shon ldquoWiva Wsn monitoringframework based on 3D visualization and augmented realityin mobile devicesrdquo in Ambient Assistive Health and WellnessManagement in the Heart of the City M Mokhtari I KhalilJ Bauchet D Zhang and C Nugent Eds vol 5597 ofLecture Notes in Computer Science pp 158ndash165 Springer BerlinGermany 2009
[11] J L Rose Ultrasonic Waves in Solid Media Cambridge Univer-sity Press 1999
[12] R Seydel and F-K Chang ldquoImpact identification of stiffenedcomposite panels I System developmentrdquo Smart Materials andStructures vol 10 no 2 pp 354ndash369 2001
[13] B Wang J Takatsubo Y Akimune and H Tsuda ldquoDevel-opment of a remote impact damage identification systemrdquoStructural Control and Health Monitoring vol 12 no 3-4 pp301ndash314 2005
[14] Z Su L Ye and Y Lu ldquoGuided Lamb waves for identificationof damage in composite structures a reviewrdquo Journal of Soundand Vibration vol 295 no 3ndash5 pp 753ndash780 2006
[15] T Kundu S Das and K V Jata ldquoPoint of impact predictionin isotropic and anisotropic plates from the acoustic emissiondatardquo Journal of the Acoustical Society of America vol 122 no4 pp 2057ndash2066 2007
[16] T Kundu S Das and K V Jata ldquoDetection of the point ofimpact on a stiffened plate by the acoustic emission techniquerdquoSmartMaterials and Structures vol 18 no 3 Article ID 0350062009
[17] F Ciampa and M Meo ldquoAcoustic emission source localizationand velocity determination of the fundamental mode A
0using
wavelet analysis and a newton-based optimization techniquerdquoSmart Materials and Structures vol 19 no 4 Article ID 0450272010
[18] S Salamone I Bartoli P di Leo et al ldquoHigh-velocity impactlocation on aircraft panels using macro-fiber composite piezo-electric rosettesrdquo Journal of Intelligent Material Systems andStructures vol 21 no 9 pp 887ndash896 2010
[19] A Perelli L de Marchi A Marzani and N Speciale ldquoAcousticemission localization in plates with dispersion and reverber-ations using sparse PZT sensors in passive moderdquo SmartMaterials and Structures vol 21 no 2 Article ID 025010 2012
[20] E D Niri A Farhidzadeh and S Salamone ldquoNonlinear kalmanfiltering for acoustic emission source localization in anisotropicpanelsrdquo Ultrasonics 2013
[21] A Liverani and A Ceruti ldquoInteractive GT code managementfor mechanical part similarity search and cost predictionrdquoComputer-Aided Design and Applications vol 7 no 1 pp 1ndash152010
[22] A Liverani A Ceruti and G Caligiana ldquoTablet-based 3Dsketching and curve reverse modellingrdquo International Journalof Computer Aided Engineering and Technology vol 5 no 2-32013
[23] S Debernardis M Fiorentino M Gattullo G Monno and AE Uva ldquoText readability in head-worn displays color and styleoptimization in video vs optical see-through devicesrdquo IEEETransactions on Visualization and Computer Graphics vol PPno 99 p 1 2013
[24] F Zhou H B-L Dun and M Billinghurst ldquoTrends in aug-mented reality tracking interaction and display a review of tenyears of ISMARrdquo in Proceedings of the 7th IEEE InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo08) pp193ndash202 Cambridge UK September 2008
[25] GWelch and E Foxlin ldquoMotion tracking no silver bullet but arespectable arsenalrdquo IEEE Computer Graphics and Applicationsvol 22 no 6 pp 24ndash38 2002
[26] M Pressigout and E Marchand ldquoHybrid tracking algorithmsfor planar and non-planar structures subject to illuminationchangesrdquo in Proceedings of the 5th IEEE and ACM InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo06)pp 52ndash55 IEEE Computer Society Santa Barbara Calif USAOctober 2006
10 Journal of Sensors
[27] P P Valentini and E Pezzuti ldquoInteractive multibody simula-tion in augmented realityrdquo Journal of Theoretical and AppliedMechanics vol 48 no 3 pp 733ndash750 2010
[28] A David and P Jean Computer Vision A Modern Approach2002
[29] HWu Z Cai and YWang ldquoVision-based auxiliary navigationmethod using augmented reality for unmanned aerial vehiclesrdquoin Proceedings of the 10th IEEE International Conference onIndustrial Informatics (INDIN rsquo12) pp 520ndash525 Beijing ChinaJuly 2012
[30] S Yuen G Yaoyuneyong and E Johnson ldquoAugmented realityan overview and five directions for ar in educationrdquo Journal ofEducational Technology Development and Exchange vol 4 no1 pp 2119ndash2140 2011
[31] D Marquardt ldquoAn algorithm for least-squares estimation ofnonlinear parametersrdquo Journal of the Society For Industrial andApplied Mathematics vol 11 no 2 pp 431ndash441 1963
[32] S Caporale L de Marchi and N Speciale ldquoFrequency warpingbiorthogonal framesrdquo IEEE Transactions on Signal Processingvol 59 no 6 pp 2575ndash2584 2011
[33] httpwwwhitlwashingtoneduartoolkit[34] httpwwwvuzixcomaugmented-realityproducts star1200
html[35] P Bocchini A Marzani and E Viola ldquoGraphical user interface
for guided acoustic wavesrdquo Journal of Computing in CivilEngineering vol 25 no 3 pp 202ndash210 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Journal of Sensors
Difference in distance of propagation (DDOP) (m)
Envelope
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
XcorrActual Δ12
sw1 and sw2
(a)
Difference in distance of propagation (DDOP) (m)
minus100
minus50
0
50
100
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08 1
Envelope
XcorrActual Δ13
sw1 and sw3
(b)
Figure 6 Cross-correlated warped signals and their envelope obtained as the modulus of the Hilbert Transform for an impact at position119909119901= 395mm and 119910
119901= 554mm
03 04 05 06 07 0802
025
03
035
04
045
05
055
06
065
07
31 2
5
11 12
9
14 15
17 18
6 7 8
4
10
16
13
x (m)
y(m
)
Figure 7 Localization results for the 18 impacts denoted by thesmall numbers crosses denote the true impact positions the centreof the circles the estimated impact positions 119909
119901 119910119901 and the radii
of the circles is taken equal to 120575cr(119909119901 119910119901)
6 Conclusions
In this work an augmented reality (AR) strategy is proposedto visualize on plate-like structures the outcomes of an impactdetectionmethodology In particular the impact position andenergy are considered To such aim first previous contribu-tions of the authors devoted to signal processing strategiesfor impact localization are exploited and extended to theestimation of the impact energy The experimental resultson an isotropic plate show the accuracy of the methodologyon both impact location and energy estimation Next as anew original contribution to the research the visualization inaugmented reality (AR) of impact position uncertainty andimpact energy is provided The experimental results show
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
08
09
1
Impact number
Nor
mal
ized
ener
gy (a
u)
EhammerEwarped signals
Figure 8 Energy estimation results for the 18 impacts considered
Figure 9 Image on the Vuzix glasses the impact indicator issuperimposed to the external real-world image
how such data can be viewed by the experimenter in real-timedirectly overimposed on the structure
The proposed strategy shows good potential to be used indamage detection andmaintenance operations In fact beside
Journal of Sensors 9
the precise and low computational cost for impact detection(position and energy) it can ease the maintenance practicesince data can be presented directly on the component tomonitor in an effective and intuitive wayThe AR is preferredto the Virtual Reality since the augmented scene is obtainedby adding virtual objects to the real-world eyesight mitigat-ing thus the unphysical feeling that the end-user experiencefrom a complete virtual approach while still supporting himduring the operations in the real-world environment
Further studies are needed to assess the reliability of theproposed technology and the applicability to more complexstructures (eg stiffened plates) and to anisotropic materials
Conflict of Interests
The authors did not receive any financial support from thecommercial identities mentioned in the work The authorsdeclare that there is no conflict of interests regarding thepublication of this paper
References
[1] httpsenwikipediaorgwikiaugmented reality[2] R T Azuma ldquoA survey of augmented realityrdquo Presence vol 6
no 4 pp 355ndash385 1997[3] R Azuma Y Baillot R Behringer S Feiner S Julier and
B MacIntyre ldquoRecent advances in augmented realityrdquo IEEEComputer Graphics and Applications vol 21 no 6 pp 34ndash472001
[4] D Krevelen and R Poleman ldquoA survey of augmented realitytechnologies applications and limitationsrdquo The InternationalJournal of Virtual Reality vol 9 no 2 pp 1ndash20 2010
[5] X Wang M J Kim P E Love and S C Kang ldquoAugmentedreality in built environment classification and implications forfuture researchrdquo Automation in Construction vol 32 pp 1ndash132013
[6] H L Chi S C Kang and X Wang ldquoResearch trends andopportunities of augmented reality applications in architectureengineering and constructionrdquo Automation in Constructionvol 33 pp 116ndash122 2013
[7] S Benbelkacem M Belhocine A Bellarbi N Zenati-Hendaand M Tadjine ldquoAugmented reality for photovoltaic pumpingsystemsmaintenance tasksrdquoRenewable Energy vol 55 pp 428ndash437 2013
[8] J M Antonio S R J Luis and S P Faustino ldquoAugmented andvirtual reality techniques for footwearrdquo Computers in Industry2013
[9] A Farhidzadeh E Dehghan-Niri A Moustafa S Salamoneand A Whittaker ldquoDamage assessment of reinforced concretestructures using fractal analysis of residual crack patternsrdquoExperimental Mechanics pp 1ndash13 2012
[10] B Koo H Choi and T Shon ldquoWiva Wsn monitoringframework based on 3D visualization and augmented realityin mobile devicesrdquo in Ambient Assistive Health and WellnessManagement in the Heart of the City M Mokhtari I KhalilJ Bauchet D Zhang and C Nugent Eds vol 5597 ofLecture Notes in Computer Science pp 158ndash165 Springer BerlinGermany 2009
[11] J L Rose Ultrasonic Waves in Solid Media Cambridge Univer-sity Press 1999
[12] R Seydel and F-K Chang ldquoImpact identification of stiffenedcomposite panels I System developmentrdquo Smart Materials andStructures vol 10 no 2 pp 354ndash369 2001
[13] B Wang J Takatsubo Y Akimune and H Tsuda ldquoDevel-opment of a remote impact damage identification systemrdquoStructural Control and Health Monitoring vol 12 no 3-4 pp301ndash314 2005
[14] Z Su L Ye and Y Lu ldquoGuided Lamb waves for identificationof damage in composite structures a reviewrdquo Journal of Soundand Vibration vol 295 no 3ndash5 pp 753ndash780 2006
[15] T Kundu S Das and K V Jata ldquoPoint of impact predictionin isotropic and anisotropic plates from the acoustic emissiondatardquo Journal of the Acoustical Society of America vol 122 no4 pp 2057ndash2066 2007
[16] T Kundu S Das and K V Jata ldquoDetection of the point ofimpact on a stiffened plate by the acoustic emission techniquerdquoSmartMaterials and Structures vol 18 no 3 Article ID 0350062009
[17] F Ciampa and M Meo ldquoAcoustic emission source localizationand velocity determination of the fundamental mode A
0using
wavelet analysis and a newton-based optimization techniquerdquoSmart Materials and Structures vol 19 no 4 Article ID 0450272010
[18] S Salamone I Bartoli P di Leo et al ldquoHigh-velocity impactlocation on aircraft panels using macro-fiber composite piezo-electric rosettesrdquo Journal of Intelligent Material Systems andStructures vol 21 no 9 pp 887ndash896 2010
[19] A Perelli L de Marchi A Marzani and N Speciale ldquoAcousticemission localization in plates with dispersion and reverber-ations using sparse PZT sensors in passive moderdquo SmartMaterials and Structures vol 21 no 2 Article ID 025010 2012
[20] E D Niri A Farhidzadeh and S Salamone ldquoNonlinear kalmanfiltering for acoustic emission source localization in anisotropicpanelsrdquo Ultrasonics 2013
[21] A Liverani and A Ceruti ldquoInteractive GT code managementfor mechanical part similarity search and cost predictionrdquoComputer-Aided Design and Applications vol 7 no 1 pp 1ndash152010
[22] A Liverani A Ceruti and G Caligiana ldquoTablet-based 3Dsketching and curve reverse modellingrdquo International Journalof Computer Aided Engineering and Technology vol 5 no 2-32013
[23] S Debernardis M Fiorentino M Gattullo G Monno and AE Uva ldquoText readability in head-worn displays color and styleoptimization in video vs optical see-through devicesrdquo IEEETransactions on Visualization and Computer Graphics vol PPno 99 p 1 2013
[24] F Zhou H B-L Dun and M Billinghurst ldquoTrends in aug-mented reality tracking interaction and display a review of tenyears of ISMARrdquo in Proceedings of the 7th IEEE InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo08) pp193ndash202 Cambridge UK September 2008
[25] GWelch and E Foxlin ldquoMotion tracking no silver bullet but arespectable arsenalrdquo IEEE Computer Graphics and Applicationsvol 22 no 6 pp 24ndash38 2002
[26] M Pressigout and E Marchand ldquoHybrid tracking algorithmsfor planar and non-planar structures subject to illuminationchangesrdquo in Proceedings of the 5th IEEE and ACM InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo06)pp 52ndash55 IEEE Computer Society Santa Barbara Calif USAOctober 2006
10 Journal of Sensors
[27] P P Valentini and E Pezzuti ldquoInteractive multibody simula-tion in augmented realityrdquo Journal of Theoretical and AppliedMechanics vol 48 no 3 pp 733ndash750 2010
[28] A David and P Jean Computer Vision A Modern Approach2002
[29] HWu Z Cai and YWang ldquoVision-based auxiliary navigationmethod using augmented reality for unmanned aerial vehiclesrdquoin Proceedings of the 10th IEEE International Conference onIndustrial Informatics (INDIN rsquo12) pp 520ndash525 Beijing ChinaJuly 2012
[30] S Yuen G Yaoyuneyong and E Johnson ldquoAugmented realityan overview and five directions for ar in educationrdquo Journal ofEducational Technology Development and Exchange vol 4 no1 pp 2119ndash2140 2011
[31] D Marquardt ldquoAn algorithm for least-squares estimation ofnonlinear parametersrdquo Journal of the Society For Industrial andApplied Mathematics vol 11 no 2 pp 431ndash441 1963
[32] S Caporale L de Marchi and N Speciale ldquoFrequency warpingbiorthogonal framesrdquo IEEE Transactions on Signal Processingvol 59 no 6 pp 2575ndash2584 2011
[33] httpwwwhitlwashingtoneduartoolkit[34] httpwwwvuzixcomaugmented-realityproducts star1200
html[35] P Bocchini A Marzani and E Viola ldquoGraphical user interface
for guided acoustic wavesrdquo Journal of Computing in CivilEngineering vol 25 no 3 pp 202ndash210 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Sensors 9
the precise and low computational cost for impact detection(position and energy) it can ease the maintenance practicesince data can be presented directly on the component tomonitor in an effective and intuitive wayThe AR is preferredto the Virtual Reality since the augmented scene is obtainedby adding virtual objects to the real-world eyesight mitigat-ing thus the unphysical feeling that the end-user experiencefrom a complete virtual approach while still supporting himduring the operations in the real-world environment
Further studies are needed to assess the reliability of theproposed technology and the applicability to more complexstructures (eg stiffened plates) and to anisotropic materials
Conflict of Interests
The authors did not receive any financial support from thecommercial identities mentioned in the work The authorsdeclare that there is no conflict of interests regarding thepublication of this paper
References
[1] httpsenwikipediaorgwikiaugmented reality[2] R T Azuma ldquoA survey of augmented realityrdquo Presence vol 6
no 4 pp 355ndash385 1997[3] R Azuma Y Baillot R Behringer S Feiner S Julier and
B MacIntyre ldquoRecent advances in augmented realityrdquo IEEEComputer Graphics and Applications vol 21 no 6 pp 34ndash472001
[4] D Krevelen and R Poleman ldquoA survey of augmented realitytechnologies applications and limitationsrdquo The InternationalJournal of Virtual Reality vol 9 no 2 pp 1ndash20 2010
[5] X Wang M J Kim P E Love and S C Kang ldquoAugmentedreality in built environment classification and implications forfuture researchrdquo Automation in Construction vol 32 pp 1ndash132013
[6] H L Chi S C Kang and X Wang ldquoResearch trends andopportunities of augmented reality applications in architectureengineering and constructionrdquo Automation in Constructionvol 33 pp 116ndash122 2013
[7] S Benbelkacem M Belhocine A Bellarbi N Zenati-Hendaand M Tadjine ldquoAugmented reality for photovoltaic pumpingsystemsmaintenance tasksrdquoRenewable Energy vol 55 pp 428ndash437 2013
[8] J M Antonio S R J Luis and S P Faustino ldquoAugmented andvirtual reality techniques for footwearrdquo Computers in Industry2013
[9] A Farhidzadeh E Dehghan-Niri A Moustafa S Salamoneand A Whittaker ldquoDamage assessment of reinforced concretestructures using fractal analysis of residual crack patternsrdquoExperimental Mechanics pp 1ndash13 2012
[10] B Koo H Choi and T Shon ldquoWiva Wsn monitoringframework based on 3D visualization and augmented realityin mobile devicesrdquo in Ambient Assistive Health and WellnessManagement in the Heart of the City M Mokhtari I KhalilJ Bauchet D Zhang and C Nugent Eds vol 5597 ofLecture Notes in Computer Science pp 158ndash165 Springer BerlinGermany 2009
[11] J L Rose Ultrasonic Waves in Solid Media Cambridge Univer-sity Press 1999
[12] R Seydel and F-K Chang ldquoImpact identification of stiffenedcomposite panels I System developmentrdquo Smart Materials andStructures vol 10 no 2 pp 354ndash369 2001
[13] B Wang J Takatsubo Y Akimune and H Tsuda ldquoDevel-opment of a remote impact damage identification systemrdquoStructural Control and Health Monitoring vol 12 no 3-4 pp301ndash314 2005
[14] Z Su L Ye and Y Lu ldquoGuided Lamb waves for identificationof damage in composite structures a reviewrdquo Journal of Soundand Vibration vol 295 no 3ndash5 pp 753ndash780 2006
[15] T Kundu S Das and K V Jata ldquoPoint of impact predictionin isotropic and anisotropic plates from the acoustic emissiondatardquo Journal of the Acoustical Society of America vol 122 no4 pp 2057ndash2066 2007
[16] T Kundu S Das and K V Jata ldquoDetection of the point ofimpact on a stiffened plate by the acoustic emission techniquerdquoSmartMaterials and Structures vol 18 no 3 Article ID 0350062009
[17] F Ciampa and M Meo ldquoAcoustic emission source localizationand velocity determination of the fundamental mode A
0using
wavelet analysis and a newton-based optimization techniquerdquoSmart Materials and Structures vol 19 no 4 Article ID 0450272010
[18] S Salamone I Bartoli P di Leo et al ldquoHigh-velocity impactlocation on aircraft panels using macro-fiber composite piezo-electric rosettesrdquo Journal of Intelligent Material Systems andStructures vol 21 no 9 pp 887ndash896 2010
[19] A Perelli L de Marchi A Marzani and N Speciale ldquoAcousticemission localization in plates with dispersion and reverber-ations using sparse PZT sensors in passive moderdquo SmartMaterials and Structures vol 21 no 2 Article ID 025010 2012
[20] E D Niri A Farhidzadeh and S Salamone ldquoNonlinear kalmanfiltering for acoustic emission source localization in anisotropicpanelsrdquo Ultrasonics 2013
[21] A Liverani and A Ceruti ldquoInteractive GT code managementfor mechanical part similarity search and cost predictionrdquoComputer-Aided Design and Applications vol 7 no 1 pp 1ndash152010
[22] A Liverani A Ceruti and G Caligiana ldquoTablet-based 3Dsketching and curve reverse modellingrdquo International Journalof Computer Aided Engineering and Technology vol 5 no 2-32013
[23] S Debernardis M Fiorentino M Gattullo G Monno and AE Uva ldquoText readability in head-worn displays color and styleoptimization in video vs optical see-through devicesrdquo IEEETransactions on Visualization and Computer Graphics vol PPno 99 p 1 2013
[24] F Zhou H B-L Dun and M Billinghurst ldquoTrends in aug-mented reality tracking interaction and display a review of tenyears of ISMARrdquo in Proceedings of the 7th IEEE InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo08) pp193ndash202 Cambridge UK September 2008
[25] GWelch and E Foxlin ldquoMotion tracking no silver bullet but arespectable arsenalrdquo IEEE Computer Graphics and Applicationsvol 22 no 6 pp 24ndash38 2002
[26] M Pressigout and E Marchand ldquoHybrid tracking algorithmsfor planar and non-planar structures subject to illuminationchangesrdquo in Proceedings of the 5th IEEE and ACM InternationalSymposium on Mixed and Augmented Reality (ISMAR rsquo06)pp 52ndash55 IEEE Computer Society Santa Barbara Calif USAOctober 2006
10 Journal of Sensors
[27] P P Valentini and E Pezzuti ldquoInteractive multibody simula-tion in augmented realityrdquo Journal of Theoretical and AppliedMechanics vol 48 no 3 pp 733ndash750 2010
[28] A David and P Jean Computer Vision A Modern Approach2002
[29] HWu Z Cai and YWang ldquoVision-based auxiliary navigationmethod using augmented reality for unmanned aerial vehiclesrdquoin Proceedings of the 10th IEEE International Conference onIndustrial Informatics (INDIN rsquo12) pp 520ndash525 Beijing ChinaJuly 2012
[30] S Yuen G Yaoyuneyong and E Johnson ldquoAugmented realityan overview and five directions for ar in educationrdquo Journal ofEducational Technology Development and Exchange vol 4 no1 pp 2119ndash2140 2011
[31] D Marquardt ldquoAn algorithm for least-squares estimation ofnonlinear parametersrdquo Journal of the Society For Industrial andApplied Mathematics vol 11 no 2 pp 431ndash441 1963
[32] S Caporale L de Marchi and N Speciale ldquoFrequency warpingbiorthogonal framesrdquo IEEE Transactions on Signal Processingvol 59 no 6 pp 2575ndash2584 2011
[33] httpwwwhitlwashingtoneduartoolkit[34] httpwwwvuzixcomaugmented-realityproducts star1200
html[35] P Bocchini A Marzani and E Viola ldquoGraphical user interface
for guided acoustic wavesrdquo Journal of Computing in CivilEngineering vol 25 no 3 pp 202ndash210 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 Journal of Sensors
[27] P P Valentini and E Pezzuti ldquoInteractive multibody simula-tion in augmented realityrdquo Journal of Theoretical and AppliedMechanics vol 48 no 3 pp 733ndash750 2010
[28] A David and P Jean Computer Vision A Modern Approach2002
[29] HWu Z Cai and YWang ldquoVision-based auxiliary navigationmethod using augmented reality for unmanned aerial vehiclesrdquoin Proceedings of the 10th IEEE International Conference onIndustrial Informatics (INDIN rsquo12) pp 520ndash525 Beijing ChinaJuly 2012
[30] S Yuen G Yaoyuneyong and E Johnson ldquoAugmented realityan overview and five directions for ar in educationrdquo Journal ofEducational Technology Development and Exchange vol 4 no1 pp 2119ndash2140 2011
[31] D Marquardt ldquoAn algorithm for least-squares estimation ofnonlinear parametersrdquo Journal of the Society For Industrial andApplied Mathematics vol 11 no 2 pp 431ndash441 1963
[32] S Caporale L de Marchi and N Speciale ldquoFrequency warpingbiorthogonal framesrdquo IEEE Transactions on Signal Processingvol 59 no 6 pp 2575ndash2584 2011
[33] httpwwwhitlwashingtoneduartoolkit[34] httpwwwvuzixcomaugmented-realityproducts star1200
html[35] P Bocchini A Marzani and E Viola ldquoGraphical user interface
for guided acoustic wavesrdquo Journal of Computing in CivilEngineering vol 25 no 3 pp 202ndash210 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of







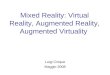





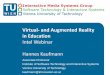

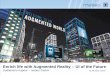
![State of Augmented Reality, Virtual Reality and Mixed Reality · State of Augmented Reality, Virtual Reality and Mixed Reality [Microsoft Hololen] [Ready Player One] Augmented Reality](https://img.pdfslide.net/doc/110x75/5f82ab6da2d89130b90d78c7/state-of-augmented-reality-virtual-reality-and-mixed-reality-state-of-augmented.jpg)


![Augmented Reality...Virtual Environment Augmented Reality Real Environment Support Archeological Field Work [Benkoet al, 2005, Columbia] [[]video] Overlay Assembly Instructions [Feiner](https://img.pdfslide.net/doc/110x75/5fa67eafd645cf3fe37fc4eb/augmented-reality-virtual-environment-augmented-reality-real-environment-support.jpg)








