Embed Size (px)
Citation preview

Research ArticleExtended State Observer Based Adaptive Back-SteppingSliding Mode Control of Electronic Throttle in TransportationCyber-Physical Systems
Yongfu Li Bin Yang Taixiong Zheng and Yinguo Li
College of Automation Chongqing University of Posts and Telecommunications Chongqing 400065 China
Correspondence should be addressed to Yongfu Li liyongfucqupteducn
Received 26 November 2014 Revised 11 January 2015 Accepted 27 January 2015
Academic Editor Xinggang Yan
Copyright copy 2015 Yongfu Li et alThis is an open access article distributed under theCreativeCommonsAttribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Considering the high accuracy requirement of information exchange via vehicle-to-vehicle (V2V) communications an extendedstate observer (ESO) is designed to estimate the opening angle change of an electronic throttle (ET) wherein the emphasis isplaced on the nonlinear uncertainties of stick-slip friction and spring in the system as well as the existence of external disturbanceIn addition a back-stepping sliding mode controller incorporating an adaptive control law is presented and the stability androbustness of the system are analyzed using Lyapunov technique Finally numerical experiments are conducted using simulationThe results show that compared with back-stepping control (BSC) the proposed controller achieves superior performance in termsof the steady-state error and rising time
1 Introduction
Transportation cyber-physical systems (T-CPS) aim toachieve full coordination and optimization of transportationsystems via the increased interaction and feedback betweenthe transportation cyber systems and transportation physicalsystems [1ndash3] For example in the vehicle platoon the desiredcontrol objective is that all vehicles in that platoonmove witha safe space headway and a safe speed Once an accidentoccurs in front of the platoon the leading car must take anemergency brake to avoid collision and then the followingvehicles will respond to the front vehicles correspondingly Inthis context the V2V-based communication of informationon the opening angle of the electronic throttle (ET) of thepreceding vehicles in a lane enables a following vehicle toreact as fast as possible to avoid a collision by adaptivelyadjusting its ET On the other hand an elegantly designedcontroller could be applied for the throttle to track the desiredvalve opening angle which can improve the fuel economyemissions and vehicle drivability [4]
Based on traffic models many researchers have demon-strated that the headway spacing between preceding vehicles
and following vehicles can be kept safe via speed controllerswhich can effectively guarantee the stability of platoon ofvehicles and avoid collision [5ndash10] Since the vehicle speedis related to the opening angle of the ET [5] the stability ofthe platoon of vehicles is associated with electronic throttlecontrol (ETC) However the ETC with high performance isa challenging problem due to the nonlinear factors such asparametric uncertainty stick-slip friction gear backlash andnonlinear spring [11ndash14] Consequently the study on controlstrategy for ET has attracted considerable attention in recentyears
Several control strategies have been proposed to improvethe performance of ETC including (i) linear control [12 13](ii) optimal control [15ndash17] (iii) slidingmode control [18ndash21](iv) model approximation control [14 22] and (v) intelligentcontrol [11 23ndash27] Deur et al [12 13] propose a proportional-integral-derivative (PID) controller that compensates theeffects of friction and limp-home using a feedback compen-sator Vasak et al [15] propose a model predictive optimalcontroller to handle with nonlinearities However themixed-integer programming cannot be implemented in a real-timemanner due to its computational complexity Subsequently
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 301656 11 pageshttpdxdoiorg1011552015301656
2 Mathematical Problems in Engineering
Vasak et al [16] deal with this problem through the pre-computation of the state feedback control in the processof dynamic programming offline Nevertheless the controllaw obtained from a look-up table will lead to the deterio-ration of control performance On the other hand slidingmode control (SMC) for ET has attracted more attentiondue to its strong robustness Horn and Reichhartinger [19]propose a high-order SMC to design ET controller and thenthe twisting and the supertwisting algorithm are used toeliminate the impacts of chattering caused by the variablestructure Furthermore Pan et al [20] put forward the slidingmode observer based SMC for ET valve However comparedwith [19] the work of [20] does not reject the influences ofchattering effectively Recently Bai and Tong [21] propose theadaptive back-stepping SMC for ET system However theyassume that the throttle opening angle change is measurablewhich is not true in practice
Recently intelligent approaches have been widely usedin the engine control such as controller design parameteridentification or fault diagnosis Sheng and Bao [26] proposea fractional order fuzzy-PID controller for ET and thefruit fly optimization algorithm is used to search for theoptimal values of the controller parameters However thegear backlash torque is ignored in this control strategy whichplays an important role in the controller design Wang andHuang [27] put forward an intelligent fuzzy controller witha feedforward term to deal with the nonlinear hystereticof ET Meanwhile the new closed-loop back-propagationtuning is also proposed for the fuzzy output membershipfunction to get better tracking performance Unfortunatelythe fuzzy rule for the feedforward controller is designedtoo simple to illustrate the characteristics of the nonlinearhysteresis Moreover with the development of automobileelectronic technology Yadav and Gaur [28] put the ETC intothe uncertain hybrid electric vehicle (HEV) speed controlwhere a self-tuning fuzzy PID controller and a special slidingmode adaptation mechanism are developed to achieve therobust performance of the ET controlled HEV Howeverthe use of the sign function in the SMC brings high-frequency chattering which usually causes serious problemsfor actuators in real applications
Since it is extremely difficult to measure those signalsincluding the opening angle change of ET the nonlinearfactors and external disturbance Hu et al [4] use a reduced-order observer to estimate the throttle opening angle changeThereafter a back-stepping controller is designed for ETCbased on Lyapunov techniques However the accuracy of theproposed method relies heavily on the precise information ofthe throttle thus its robustness to estimation error should beimproved Moreover the effect of torque caused by air flowand parameters variation is ignored in the algorithm whichis significant for the practical performance of the ETC
Regarding the aforementioned issues an extended stateobserver (ESO) based adaptive back-stepping sliding modecontroller for ET valve is proposed in this paper and thenan adaptive control law is further designed using Lyapunov-based techniques Finally the numerical experiments areconducted and the results show that the combination of
MR
uMicrocontroller
Bipolar chopper
Car battery
ia
120596m
Gearbox
Electronic throttle bodyValveplate
Returnspring
Air inflowPositionsensor
120579
Figure 1 The control structure of ET
the adaptive back-stepping and SMC can improve the per-formance of ETC in terms of the steady error and the risingtime
The rest of this paper is organized as follows Section 2describes themathematicalmodel of the ET system includingfriction nonlinear spring and gear backlash Section 3designs an ESO for ET Section 4 proposes an adaptive back-stepping SMC controller Section 5 performs simulation-based numerical experiments and compares the performanceof the proposed controller with that of BSC controllers Thefinal section provides some concluding remarks
2 Model
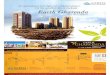
As shown in Figure 1 ET valve consists of a DC motor agearbox a valve plate a position sensor and a dual returnspring [11]
According to Kirchhoff rsquos law the model of the motorwinding circuit is as follows [4]
119871119886
d119894119886
d119905+ 119877119886119894119886= 119896ch119906 minus 119896V
120579119898 (1)
where 119871119886and 119877
119886are the armature inductance and the
overall resistance of the armature circuit respectively And119894119886 119906 represent the dc motor armature current and the input
control voltage respectively 119896ch and 119896V denote the choppergain and the electromotive force constant and 120579
119898is themotor
angular velocityIn terms of the torque balance principle the dynamic
characteristic of throttle valve is given by [4]
1198691198962
119897
120579 = 119896119897119896119905119894119886minus 119879119904minus 119879119891minus 119879119897 (2)
where 120579 is the position (opening angle) of throttle valve 119869 isthe overall moment of inertia with respect to the motor side119896119905is motor torque constant 119879
119904is the throttle return spring
torque 119879119897is the torque caused by the air flow and 119896
119897= 120579119898120579
is gear ratio 119879119891is frictional torque caused by Coulomb and
sliding friction as follows [4]
119879119891= 119896119905119891
sgn ( 120579) + 119896119891
120579 (3)
where 119896119905119891
is Coulomb friction coefficient and 119896119891is sliding
friction coefficient In addition the throttle return springtorque 119879
119904is given by [4]
119879119904= 119896sp (120579 minus 1205790) + 119896pre sgn (120579 minus 1205790) (4)
Mathematical Problems in Engineering 3
where 119896sp is spring elastic coefficient 119896pre is the springtightening torque coefficient and 120579
0is the default opening
angle of the ETThe system sampling time is chosen with respect to the
dominant time constant of the linearized ET model and isset to 119879 = 5ms [12] The armature current dynamics can beneglected since the time constant119879
119886= 119871119886119877119886le 119879Therefore
(1) can be simplified as [12 15]
119894119886=
1
119877119886
(119896ch119906 minus 119896V120579119898) (5)
Based on (2)ndash(5) the ET model is
120579 =1
1198962
119897119869[119896119897119896119905119896ch
119877119886
119906 minus (1198962
119897119896119905119896V
119877119886
+ 119896119891) 120579 minus 119896pre sgn (120579 minus 1205790)
minus 119896sp (120579 minus 1205790) minus 119896119905119891 sgn ( 120579) minus 119879119897]
(6)
Then let 1199091= 120579 and 119909
2= 120579 the state-space expression of
(6) can be written as
[
1
2
] =[[
[
0 1
minus119896sp
1198962
119897119869
1198601
]]
]
[
1199091
1199092
] + [
0
119861] 119906 + [
0
119862 (1199091 1199092)] (7)
where 1198601= minus(119896
2
119897119896119905119896V + 119896
119891119877119886)1198962
119897119869119877119886 119861 = 119896
119905119896ch119896119897119869119877119886 and
119862(1199091 1199092) = (minus119896pre sgn(120579minus1205790)+119896sp1205790)119896
2
119897119869minus(119896119905119891sgn( 120579)+119879
119897)
1198962
119897119869Let 119889(119905) represent the total disturbance including the
combining the sgn( 120579) unknown 119879119897(the torque caused by the
air flow) and the external disturbance we can rewrite (7)withconsideration that the Coulomb friction coefficient 119896
119905119891is very
small as follows
[
1
2
] =[[
[
0 1
minus119896sp
1198962
119897119869
1198601
]]
]
[
1199091
1199092
] + [
0
119861] 119906 + [
0
119862 (1199091)] + [
0
119889 (119905)]
(8)
where 1198601= minus(119896
2
119897119896119905119896V + 119896
119891119877119886)1198962
119897119869119877119886 119861 = 119896
119905119896ch119896119897119869119877119886 and
119862(1199091) = (minus119896pre sgn(120579 minus 1205790) + 119896sp1205790)119896
2
119897119869
Taking the parametric variations of ET into considera-tion (8) can be further rewritten as
1= 1199092
2= (119860 + Δ119860) 119909 + (119861 + Δ119861) 119906 + 119889 (119905)
(9)
where 119860 = [minus(120587119896sp + 2119896119896pre)1205871198962
119897119869 1198601] 119889(119905) = ((120587119896sp +
2119896119896pre)1205871198962
119897119869) 1205790+ 119889(119905) 119896 gt 0
Further we have2= 119860119909 + 119861119906 + 119865 (10)
where 119865 is the total uncertainty given by
119865 = Δ119860x + Δ119861119906 + 119889 (119905) (11)
where |119865| le 119865 Δ119860 and Δ119861 are the system parametricuncertainties
3 Extended State Observer Design
Since ESO can estimate the system states as well as distur-bance we use the ESO to estimate the opening angle changeof ET [29ndash31] Based on (8) the nonlinear system is designedas follows [29]
_1199091=
_1199092minus 1198921(_1199091minus 1199091)
_1199092=
_1199093minus 1198922(_1199091minus 1199091) + 119861119906
_1199093= minus 119892
3(_1199091minus 1199091)
(12)
where 1199093= (minus119896sp119896
2
119897119869)1199091+ 119862(119909
1) + 119889(119905) In order to facilitate
analysis we also define 119892119894(119911) = 119897
119894119892(119911) (119894 = 1 2 3) and 119892(119911)
is a nonlinear function Hence the ESO can be expressed asfollows [29]
_1199091=
_1199092minus 11989711198921(_1199091minus 1199091)
_1199092=
_1199093minus 11989721198922(_1199091minus 1199091) + 119861119906
_1199093= minus 11989731198923(_1199091minus 1199091)
(13)
Defining 1205751199091=
_1199091minus 1199091 1205751199092=
_1199092minus 1199092 1205751199093=
_1199093minus 1199093
then based on (8) and (13) we can obtain
1205751= 1205751199092minus 11989711198921(1205751199091)
1205752=
_1199092minus 11989721198922(1205751199091) + 119861119906
1205753= minus 11989731198923(1205751199091) minus 3
(14)
where 3is derivative of 119909
3
Assume that 3is bounded and the nonlinear function
119892(119911) is smooth that is 119892(0) = 0 and 119892(119911) = 0 Hence (14)can be rewritten as follows
1205751= 1205751199092minus 11989711198921(1205751199091) 1205751199091
1205752=
_1199092minus 11989721198922(1205751199091) 1205751199091+ 119861119906
1205753= minus 11989731198923(1205751199091) 1205751199091minus 3
(15)
Suppose
119897119894=
119886119894
119892 (1205751199091)
(119894 = 1 2 3) (16)
Substituting (16) into (15) the state-space equation of (15)can be expressed as
[[
[
1205751
1205752
1205753
]]
]
=[[
[
minus11988611 0
minus11988620 1
minus11988630 0
]]
]
[[
[
1205751199091
1205751199092
1205751199093
]]
]
+[[
[
0
0
minus1
]]
]
3 (17)
4 Mathematical Problems in Engineering
ESO
u
+
+
minus
minus
120579dx1z1
+
Back-steppingDuduce
slidingsurface
Adaptive back-steppingsliding mode controller
Adaptive back-steppingsliding mode controller
Lyapunov stabilityanalysis
Adaptive law
x2
x1
Figure 2 Control strategy
Define
P =[[
[
minus11988611 0
minus11988620 1
minus11988630 0
]]
]
E =[[
[
0
0
minus1
]]
]
120575X = (120575119909112057511990921205751199093)T
(18)
Then (17) can be rewritten as
120575X = P120575X + E3 (19)
It is shown from (19) that 119897119894(119894 = 1 2 3) can be determined
by 119886119894(119894 = 1 2 3) Hence we could choose appropriate
parameters 119886119894(119894 = 1 2 3) to guarantee the closed-loop
stability of system (19)Submitting (16) into (12) the ESO can be obtained as
follows_1199091=
_1199092minus
1198861
119892 (_1199091minus 1199091)
119892 (_1199091minus 1199091)
_1199092=
_1199093minus
1198862
119892 (_1199091minus 1199091)
119892 (_1199091minus 1199091) + 119861119906
_1199093= minus
1198863
119892 (_1199091minus 1199091)
119892 (_1199091minus 1199091)
(20)
where the nonlinear function119892(119895) satisfies the following threeconditions [29]
(i) 119892(119895) is continuously differentiable(ii) 119892(0) = 0(iii) d119892(119895)d119895 = 0
4 Adaptive Back-Stepping SMC Design
To overcome the disturbance and ensure the robustness ofcontroller [32ndash34] we design the adaptive back-steppingcontroller with SMC for the ET system Figure 2 illustratesthe control strategy where
_1199092is the estimation of opening
angle change for the ETThe back-stepping technique consists of a step-by-step
construction of a new systemwith state variables 119911119894= 119909119894minus119909119889119894
with 119909119889119894
being the desired value for state 119909119894 Let the desired
ET angle be 120579119889 and we start by constructing the first state
variable 1199111as the tacking error
1199111= 1199091minus 120579119889 (21)
Then we will design the second desired state 1199091198892(119905) such that
the state 1199111satisfies
1= minus11988811199111if 1199092(119905) = 119909
1198892(119905) where 119888
1is a
positive constant Then it follows from (21) and (9) that 1=
1199092minus 120579119889= 1199091198892minus 120579119889= minus11988811199111 Hence we have 119909
1198892= minus11988811199111+ 120579119889
and the second system state variable 1199112is constructed as
1199112= 1199092minus 1199091198892
= 1199092minus 120579119889+ 11988811199111 (22)
The candidate Lyapunov function can be chosen as [35]
1198811=1
21199112
1 (23)
Then we have
1= 11991111= 1199111(1199092minus 120579119889) (24)
Based on the fact that 1199112= 1199092minus 120579119889+ 11988811199111 we know that
1=
1199092minus 120579119889= 1199112minus 11988811199111 thus it is obtained that
1= 11991111= 11991111199112minus 11988811199112
1 (25)
To facilitate subsequent development a sliding surface interms of 119911
1and 1199112is defined as follows
119878 = 11989611199111+ 1199112 (26)
where 1198961gt 0
Remark 1 It is worthwhile to point out that in generalthe sliding mode surface is usually defined as 119878 = 119911
2for
traditional back-stepping based SMC [36] for which it isrequired to guarantee that the system state converges to thesliding mode surface 119878 = 119911
2= 0 in finite time and
then we can derive from (25) that 1199111will be stabilized to
origin However unlike the traditional approach we definethe sliding surface as 119878 = 119896
11199111+ 1199112in (26) other than
119878 = 1199112 and it is shown in the subsequent Theorems 2 and 3
that 1199111(119905) 1199112(119905) and 119878(119905) will asymptotically converge to zero
simultaneously which relaxes the finite-time requirement forthe sliding surface in the traditional design
Mathematical Problems in Engineering 5
Inspired by the Lyapunov-based control design methodsa controller with the capability of disturbance rejection andstrong robustness is designed as follows
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860x minus 119888
11+ 120579119889minus 119865 sgn (119878)
minus 120581 (119878 + 120578 sgn (119878))] (27)
where 120581 gt 0 120578 gt 0
Theorem 2 With the proposed controller in (27) if thefollowing condition is satisfied
|119876| gt 0 (28)
with
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(29)
Then the closed-loop system is Lyapunov stable in the sense that
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(30)
Proof Based on (23) a candidate Lyapunov function can bechosen as [37]
1198812= 1198811+1
21198782
(31)
Then
2= 1+ 119878 119878 = 119911
11199112minus 11988811199112
1+ 119878 (119896
11+ 2)
= 11991111199112minus 11988811199112
1
+ 119878 (1198961(1199112minus 11988811199111) + 119860x + 119861119906 + 119865 minus 120579
119889+ 11988811)
(32)
Based on (32) let
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860x minus 119888
11+ 120579119889minus 119865 sgn (119878)
minus 120581 (119878 + 120578 sgn (119878))] (33)
where 120581 gt 0 120578 gt 0 then
2= 1+ 119878 119878
= 11991111199112minus 11988811199112
1
+ 119878 (1198961(1199112minus 11988811199111) + 119860x + 119861119906 + 119865 minus 120579
119889+ 11988811)
= 11991111199112minus 11988811199112
1minus 1205811198782
minus 120581120578 |119878| + 119865119878 minus 119865 |119878|
le minus 11988811199112
1+ 11991111199112minus 1205811198782
minus 120581120578 |119878|
(34)
Let
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(35)
Hence
119911T119876119911 = [119911
11199112][[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
[
1199111
1199112
]
= 11988811199112
1minus 11991111199112+ 1205811198962
11199112
1+ 2120581119896
111991111199112+ 1205811199112
2
= 11988811199112
1minus 11991111199112+ 1205811198782
(36)
where 119911T = [11991111199112] Consider
|119876| = 120581 (1198881+ 1205811198962
1) minus (120581119896
1minus1
2)
2
= 120581 (1198881+ 1205811198961) minus
1
4 (37)
If 120581 1198881 and 119896
1are designed reasonably to ensure |119876| gt 0 then
119876 is a positive definite matrix Consequently
2le minus119911
T119876119911 minus 120581120578 |119878| le 0 (38)
According to 2le 0 we know that 119881
2is a nonincreasing
function when 119905 isin [0infin) so 1198812(119905) le 119881
2(0) lt infin
Since2= 11199112+ 11991112minus 2119888111991111minus 120581119878 119878 minus 120581120578 119878 sgn (119878)
+ 119865 119878 minus 119865 119878 sgn (119878) (39)
Based on (21) (26) and (32) we know that 1199111(119905) 1199112(119905) and
119878(119905) are bounded when 119905 ge 0 Since 1(119905) = 119911
2minus 11988811199111 we
know that 1(119905) isin L
infin Assuming that 120579
119889 120579119889 120579119889isin Linfin it
is known from 2(119905) =
2minus 120579119889minus 11988811that
2(119905) isin L
infin
Furthermore based on (39) we know that 2is uniformly
continuous because 2isin Linfin
In addition we have
int
infin
0
100381610038161003816100381610038162
10038161003816100381610038161003816d119905 = 10038161003816100381610038161198812 (infin)
1003816100381610038161003816 minus10038161003816100381610038161198812 (0)
1003816100381610038161003816 lt infin (40)
According to (40) we know that 2
isin L2 Hence we
know that lim119905rarrinfin
2= 0 based on Barbalatrsquos Lemma [38]
Moreover we know from 2le minus119911
T119876119911 minus 120581120578|119878| le 0 that
lim119905rarrinfin
2(119905) le lim
119905rarrinfin(minus119911
T119876119911 minus 120581120578|119878|) le 0 thus we
have lim119905rarrinfin
(119911T119876119911 + 120581120578|119878|) = 0 Consequently we have
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin1199112(119905) = 0 lim
119905rarrinfin119878(119905) = 0
Furthermore if the parametric uncertainties in ET areconsidered an adaptive controller is designed as follows
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860xminus
_119865 + 120579119889minus 11988811
minus 120581 (119878 + 120578 sgn (119878))]
=119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091minus
_119865 +
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
1199092
+ 120579119889minus (1198961+ 1198881) 1199092+ 119896111988811199111+ (1198961+ 1198881) 120579119889
minus 120581 (119878 + 120578 sgn (119878))]
(41)
6 Mathematical Problems in Engineering
where_119865 is the estimation of 119865 and the parameter updating
law is designed as
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) + 1199092minus 120579119889] (42)
Theorem 3 With the proposed adaptive controller in (41) andthe parameter estimation law in (42) if |119876| gt 0 with
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(43)
then the closed-loop system is stable in the sense that
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(44)
Proof Firstly we assume that the parametric uncertaintiesand external disturbance change slowly then = 0 Todesign the controller with adaptive capability of parametricuncertainties the candidate Lyapunov function is defined asfollows [37]
1198813= 1198812+
1
21205821198652
(45)
where 119865 = 119865 minus_119865 and
_119865 is the estimation of 119865 120582 gt 0 Then
3= 2minus1
120582119865_119865
= 11991111199112minus 11988811199112
1
+ 119878 [1198961(1199112minus 11988811199111) + 119860x + 119861119906 +
_119865 minus 120579
119889+ 11988811]
minus1
120582119865(
_119865 minus 120582119878)
(46)
Based on (46) we let
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860xminus
_119865 + 120579119889minus 11988811
minus 120581 (119878 + 120578 sgn (119878))]
=119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091minus
_119865 +
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
1199092
+ 120579119889minus (1198961+ 1198881) 1199092+ 119896111988811199111+ (1198961+ 1198881) 120579119889
minus 120581 (119878 + 120578 sgn (119878))]
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) + 1199092minus 120579119889]
(47)
Hence substituting (47) into (46) we have
3= 2minus1
120582119865_119865 = 119911
11199112minus 11988811199112
1minus 1205811198782
minus 120581120578 |119878| (48)
0 t
Clock To workspace
State
To workspace
Input Signal
Throttle Controller
Throttle Observer
Throttle Plant
Equation (51)
Equation (20)
Equation (8)
Figure 3 Simulink main program
According to (36) we can rewrite (48) as
3le minus119911
TQ119911 minus 120581120578 |119878| (49)
If 119876 is a positive definite matrix then 3le 0 Hence the
proposed adaptive controller is Lyapunov stableSimilar to the proof of Theorem 2 then we can use
Barbalatrsquos Lemma to obtain that [38]
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(50)
Based on the above discussion if the immeasurablevariable 119909
2in (47) is replaced with the estimation value
_1199092 we can obtain the back-stepping SMC incorporating the
proposed ESO as follows
119906 =119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091+
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
_1199092minus
_119865
+ 120579119889minus (1198961+ 1198881)_1199092+ (1198961+ 1198881) 120579119889+ 119896111988811199111
minus 120581 (119878 + 120578 sgn (119878))]
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) +
_1199092minus 120579119889]
(51)
5 Numerical Experiments
51 Simulations In order to verify the effectiveness of theproposed controller the simulation of ETC is conductedunder the MatlabSimulink platform based on the dynamiccharacteristics of ET valve In addition we choose 119892(119895) =
(1minus119890minus119895
)(1+119890minus119895
)Thewhole Simulinkmain program is shownin Figure 3 and the basic parameter configuration of ET islisted in Table 1
According to the requirement of ETC in engineeringapplications given in [12] the reference inputs are chosen asthe step and sine signals respectively Figure 4 depicts thesignal tracking results using the step reference signal whenthe desired throttle opening is 60∘ Figure 4 shows that theposition of ET is able to track the reference signal withoutovershoot within 100ms while the tracking results with
Mathematical Problems in Engineering 7
Table 1 Basic parameter comfiguration of ET
Parameters Value Units1205790
2 deg119896119897
1695 mdash119896119905
0016 NsdotmA119896pre 0107 Nsdotm119877119886
28 Ω
119869 4 times 10minus6 kgsdotm2
119896119905119891
00048 Nsdotm119896ch 24 mdash119896V 0016 Vsdotsrad119896119891
4 times 10minus4 Nsdotmsdotsrad119896sp 00247 Nsdotmrad
0 02 04 06 08 10
10
20
30
40
50
60
70
Time (s)
Desired inputActual output
001 002 003 004 005505254565860
Thro
ttle a
ngle
(deg
)
Figure 4 Step tracking response
the sine reference signal are shown in Figure 5 FromFigures 4and 5 the results show that the proposed controller can satisfythe ET tracking control requirement in [12] with the step andsine reference signals
As foregoing discussion those parameters (119896119905 119896119905119891 119896sp) are
designed using Lyapunov techniques Figure 6 is the stepresponse of ETC with parametric uncertainties when desiredthrottle opening is 60∘ and the parameters Δ119896
119905= plusmn00048
Δ119896119905119891
= plusmn00014 Δ119896sp = plusmn00074 Figure 6 shows that thesettling time of ETC is less than 100ms Figure 6 also showsthat the steady-state error of ETC tends to zero Figure 7 isthe adaptive estimation value of the total uncertainty 119865 Inaddition the results form Figure 6 show that the proposedcontroller has a better robustness compared with Figure 4
The discussion mentioned above demonstrates that theproposed controller has strong robustness with respect toparametric uncertaintiesThat is to say a stable vehicle speedcan be guaranteed since the adaptive controller can quicklyadjust the opening angle of ET valve when an externaldisturbance occurs
0 005 01202530354045
0 02 04 06 08 1
0
10
20
30
40
50
60
70
Time (s)
Desired inputActual output
minus10
Thro
ttle a
ngle
(deg
)
Figure 5 Sine tracking response
0
20
40
60
80
0 002 004 006565860
0 002 004 006
0 02 04 06 08 1Time (s)
0 02 04 06 08 1Time (s)
Desired inputActual output
minus60
minus40
minus20
0
20
minus6minus4minus20
Trac
king
erro
rs (d
eg)
Thro
ttle a
ngle
(deg
)
Figure 6 Step tracking response of parameters changes
In practical application the mutation of throttle openingis inevitable which has important influence on vehicle accel-erationdeceleration Furthermore traffic congestion willlead to the stop-and-go phenomenon in traffic flow furtherresulting in the vehicle speed change Hence ET should havegood responsiveness capability to track the change
Therefore it is significant to conduct analysis on the con-troller performance under the condition of input signalmuta-tion Moreover the nonlinear spring does not allow openingangles below 5∘ and above 80∘ [20] the experiment under theminimum and maximum values of square reference signalis set as 10∘ and 60∘ respectively as shown in Figure 8Figure 8 shows that the proposed controller can track thesmall values accurately (the important condition of idle speedcontrol) so does the large values (the essential condition of
8 Mathematical Problems in Engineering
Table 2 Controller performance comparison
Control methods Setting time Steady-state errors under parameter change OvershootBack-stepping control in [4] lt140ms lt2∘ a littleController of this present paper lt100ms lt01∘ little
F ad
aptiv
e val
ue
0 02 04 06 08 1Time (s)
minus1400
minus1200
minus1000
minus800
minus600
minus400
minus200
0
Figure 7 Estimation of 119865
0
20
40
60
80
0 02 04 06 08 1Time (s)
Desired inputActual output
Trac
king
erro
rs (d
eg)
0 02 04 06 08 1Time (s)
minus100
minus50
0
50
100
Thro
ttle a
ngle
(deg
)
Figure 8 Square wave tracking response
vehicle acceleration) In addition the settling time is less thanrequired 100ms On the other hand Figure 8 also showsthat the steady-state errors approximate 0 which illustratesthat the proposed controller can satisfy the requirement ofETC Hence the results from this simulation show that thedesigned controller also has a good control performanceunder square wave input signal It also implies that the vehiclein the platoon can follow the preceding vehicles with safe
space headway and safe speed via ETC when the stop-and-go phenomenon emerges
52 Performance Comparison Compared with the literature[4] this study considers not only the external disturbancebut also the parametric uncertainties and the torque causedby the air flow Then the adaptive law is designed using theLyapunov techniques Finally the experiment is conductedusing simulation and the comparison results are summarizedin Table 2 Table 2 shows that the proposed adaptive back-stepping SMC has better control performance than the back-stepping controller in [4] in terms of the settling time steady-state error and the overshoot
53 Simulated Experiment In this section we incorporatethe ET controller withmean valuemodeling of spark ignitionengine under the conditions of pressing the accelerator pedaland easing it off [39] The schematic block diagram of mainsimulation is shown in Figure 9 Figure 10 shows the throttleopening angle tracking performance It can be seen thatthe proposed controller can track the desired input signaleffectively Figures 11 12 and 13 show the manifold pressureengine speed and throttle airflow respectively The resultsshow that the proposed controller can control the engineaccurately via ETC
6 Conclusions
To improve the accuracy of the information for ETC underV2V communications an ESO based adaptive back-steppingSMC is proposed based on the Lyapunov theory in thepresence of high nonlinearity of ET and immeasurable signalsfor throttle opening angle change In addition with thedesigned adaptive law strong robustness to parametric uncer-tainties and external disturbance can be achieved Simulationresults show that the proposed controller can track thedesired reference input signal fast and accurately with strongrobustness to uncertainties and disturbances
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thiswork is jointly supported by theNationalNatural ScienceFoundation of China (Grant no 61304197) the Scientific and
Mathematical Problems in Engineering 9
Desiredinput
Mean valueModelling of spark
Ignition engines
Actual output
Manifold pressureEngine speedThrottle airflow
+
minus
Throttle Controller Throttle Model
Equation (51) Equation (8)
Figure 9 Schematic block diagram of main simulation
0 2 4 6 8 10Time (s)
0
10
20
30
40
50
60
70
Thro
ttle a
ngle
(deg
)
Desired inputActual output
Figure 10 Throttle opening angle
0 2 4 6 8 104
5
6
7
8
9
10
Man
ifold
pre
ssur
e (pa
)
Time (s)
times104
Figure 11 Manifold pressure
Technological Talents of Chongqing (Grant no cstc2014kjrc-qnrc30002) the Key Project of Application andDevelopmentof Chongqing (Grant no cstc2014yykfB40001) the NatureScience Funds of Education Committee of Chongqing (Grantno KJ130506) Natural Science Funds of Chongqing (Grantnos cstc2014jcyjA60003 and cstc2012jjA40035) and Natural
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Engi
ne sp
eed
(rpm
)
0 2 4 6 8 10Time (s)
Figure 12 Engine speed
Thro
ttle a
irflow
(gs
)
0 2 4 6 8 10Time (s)
minus15
minus10
minus5
0
5
10
15
20
25
Figure 13 Throttle airflow
Science Funds of CQUPT (Grant nos A2012-78 and A2013-27) The authors would like to express their gratitude toDr Hongchun Qu and Dr Xiaoming Tang from ChongqingUniversity of Posts and Telecommunications for their gooddiscussions on the paper preparation
References
[1] V Milanes S E Shladover J Spring C Nowakowski HKawazoe and M Nakamura ldquoCooperative adaptive cruise
10 Mathematical Problems in Engineering
control in real traffic situationsrdquo IEEETransactions on IntelligentTransportation Systems vol 15 no 1 pp 296ndash305 2014
[2] D-H Sun Y-F Li W-N Liu M Zhao and X-Y Liao ldquoResearch summary on transportation cyber physical systems andthe challenging technologiesrdquo China Journal of Highway andTransport vol 26 no 1 pp 144ndash154 2013
[3] L Li D Wen and D Yao ldquoA survey of traffic control withvehicular communicationsrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 425ndash432 2014
[4] Y FHuC Li J LiH YGuo P Y Sun andHChen ldquoObserver-based output feedback control of electronic throttlesrdquo ActaAutomatica Sinica vol 37 no 6 pp 746ndash754 2011
[5] P Ioannou and Z Xu ldquoThrottle and brake control system forautomatic vehicle followingrdquo Journal of Intelligent Transporta-tion Systems vol 1 no 4 pp 345ndash377 1994
[6] Y Li and D Sun ldquoMicroscopic car-following model for thetraffic flow the state of the artrdquo Journal of Control Theory andApplications vol 10 no 2 pp 133ndash143 2012
[7] T Tang W Shi H Shang and Y Wang ldquoA new car-followingmodel with consideration of inter-vehicle communicationrdquoNonlinear Dynamics vol 76 no 4 pp 2017ndash2023 2014
[8] J Ploeg N Van DeWouw and H Nijmeijer ldquoLp string stabilityof cascaded systems application to vehicle platooningrdquo IEEETransactions on Control Systems Technology vol 22 no 2 pp786ndash793 2014
[9] W Wang S S Liao X Li and J S Ren ldquoThe processof information propagation along a traffic stream throughintervehicle communicationrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 345ndash354 2014
[10] L Xiao and F Gao ldquoPractical string stability of platoon of adap-tive cruise control vehiclesrdquo IEEE Transactions on IntelligentTransportation Systems vol 12 no 4 pp 1184ndash1194 2011
[11] X F Yuan Y N Wang L H Wu X Z Zhang and WSun ldquoNeural network based self-learning control strategy forelectronic throttle valverdquo IEEE Transactions on Vehicular Tech-nology vol 59 no 8 pp 3757ndash3765 2010
[12] J Deur D Pavkovic N Peric M Jansz and D Hrovat ldquoAnelectronic throttle control strategy including compensation offriction and limp-home effectsrdquo IEEE Transactions on IndustryApplications vol 40 no 3 pp 821ndash834 2004
[13] D Pavkovic J DeurM Jansz andN Peric ldquoAdaptive control ofautomotive electronic throttlerdquo Control Engineering Practicevol 14 no 2 pp 121ndash136 2006
[14] X Yuan and Y Wang ldquoA novel electronic-throttle-valve con-troller based on approximate model methodrdquo IEEE Transac-tions on Industrial Electronics vol 56 no 3 pp 883ndash890 2009
[15] M Vasak M Baotic MMorari I Petrovic and N Peric ldquoCon-strained optimal control of an electronic throttlerdquo InternationalJournal of Control vol 79 no 5 pp 465ndash478 2006
[16] M Vasak M Baotic I Petrovic and N Peric ldquoHybrid theory-based time-optimal control of an electronic throttlerdquo IEEETransactions on Industrial Electronics vol 54 no 3 pp 1483ndash1494 2007
[17] D Kim H Peng S Bai and J M Maguire ldquoControl ofintegrated powertrain with electronic throttle and automatictransmissionrdquo IEEE Transactions on Control Systems Technol-ogy vol 15 no 3 pp 474ndash482 2007
[18] K Nakano U Sawut K Higuchi and Y Okajima ldquoModellingand observer-based sliding-mode control of electronic throttlesystemrdquo ECTI Transactions on Electrical Engineering Electron-ics and Communications vol 4 no 1 pp 22ndash28 2006
[19] M Horn and M Reichhartinger ldquoSecond-order sliding modecontrol of electronic throttle valvesrdquo in Proceedings of the IEEE10th International Workshop on Variable Structure Systems (VSSrsquo08) pp 280ndash284 IEEE Antalya Turkey June 2008
[20] Y D Pan U Ozguner and O H Dagci ldquoVariable-structurecontrol of electronic throttle valvesrdquo IEEE Transactions onIndustrial Electronics vol 55 no 11 pp 3899ndash3907 2008
[21] R Bai and S Tong ldquoAdaptive backstepping sliding-mode con-trol of the electronic throttle system in modern automobilesrdquoMathematical Problems in Engineering vol 2014 Article ID383064 8 pages 2014
[22] X Yuan Y Wang and L Wu ldquoSVM-based approximate modelcontrol for electronic throttle valverdquo IEEE Transactions onVehicular Technology vol 57 no 5 pp 2747ndash2756 2008
[23] M Baric I Petrovic and N Peric ldquoNeural network-basedsliding mode control of electronic throttlerdquo Engineering Appli-cations of Artificial Intelligence vol 18 no 8 pp 951ndash961 2005
[24] M Nentwig and P Mercorelli ldquoThrottle valve control using aninverse local linear model tree based on a Fuzzy neural net-workrdquo inProceedings of the 7th IEEE International Conference onCybernetic Intelligent Systems (CIS rsquo08) pp 1ndash6 London UKSeptember 2008
[25] M Baric I Petrovic and N Peric ldquoNeural network based slid-ingmode controller for a class of linear systemswith unmatcheduncertaintiesrdquo in Proceedings of the 41st IEEE Conference onDecision and Control vol 1 pp 967ndash972 Las Vegas Nev USADecember 2002
[26] W Sheng and Y Bao ldquoFruit fly optimization algorithm basedfractional order fuzzy-PID controller for electronic throttlerdquoNonlinear Dynamics vol 73 no 1-2 pp 611ndash619 2013
[27] C-H Wang and D-Y Huang ldquoA new intelligent fuzzy con-troller for nonlinear hysteretic electronic throttle in modernintelligent automobilesrdquo IEEE Transactions on Industrial Elec-tronics vol 60 no 6 pp 2332ndash2345 2013
[28] A K Yadav and P Gaur ldquoRobust adaptive speed control ofuncertain hybrid electric vehicle using electronic throttle con-trol with varying road graderdquo Nonlinear Dynamics vol 76 no1 pp 305ndash321 2014
[29] Z J Kang and X Y Chen ldquoA design method of nonlinearextension state observerrdquo Electric Machines and Control vol 5no 3 pp 199ndash203 2001
[30] A A Godbole J P Kolhe and S E Talole ldquoPerformanceanalysis of generalized extended state observer in tacklingsinusoidal disturbancesrdquo IEEE Transactions on Control SystemsTechnology vol 21 no 6 pp 2212ndash2223 2013
[31] Z Gao X Dai T Breikin and H Wang ldquoNovel parameteridentification by using a high-gain observer with applicationto a gas turbine enginerdquo IEEE Transactions on IndustrialInformatics vol 4 no 4 pp 271ndash279 2008
[32] M Morawiec ldquoThe adaptive backstepping control of perma-nent magnet synchronous motor supplied by current sourceinverterrdquo IEEE Transactions on Industrial Informatics vol 9 no2 pp 1047ndash1055 2013
[33] J R Dominguez A Navarrete M A Meza A G Loukianovand J Canedo ldquoDigital sliding-mode sensorless control forsurface-mounted PMSMrdquo IEEE Transactions on IndustrialInformatics vol 10 no 1 pp 137ndash151 2014
[34] D Zhao T Zou S Li and Q Zhu ldquoAdaptive backsteppingsliding mode control for leader-follower multi-agent systemsrdquoIET Control Theory amp Applications vol 6 no 8 pp 1109ndash11172012
Mathematical Problems in Engineering 11
[35] Y C Fang P C Wang N Sun and Y C Zhang ldquoDynamicsanalysis and nonlinear control of an offshore boom cranerdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 414ndash4272014
[36] Y Xia Z Zhu and M Fu ldquoBack-stepping sliding mode controlfor missile systems based on an extended state observerrdquo IETControl Theory amp Applications vol 5 no 1 pp 93ndash102 2011
[37] N Sun Y C Fang and H Chen ldquoA new antiswing controlmethod for underactuated cranes with unmodeled uncer-tainties theoretical design and hardware experimentsrdquo IEEETransactions on Industrial Electronics vol 62 no 1 pp 453ndash4652015
[38] X Zhang Y Fang andN Sun ldquoMinimum-time trajectory plan-ning for underactuated overhead crane systems with state andcontrol constraintsrdquo IEEETransactions on Industrial Electronicsvol 61 no 12 pp 6915ndash6925 2014
[39] E Hendricks and S C Sorenson ldquoMean value modelling ofspark ignition enginesrdquo SAE Technical Paper 900616 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
Vasak et al [16] deal with this problem through the pre-computation of the state feedback control in the processof dynamic programming offline Nevertheless the controllaw obtained from a look-up table will lead to the deterio-ration of control performance On the other hand slidingmode control (SMC) for ET has attracted more attentiondue to its strong robustness Horn and Reichhartinger [19]propose a high-order SMC to design ET controller and thenthe twisting and the supertwisting algorithm are used toeliminate the impacts of chattering caused by the variablestructure Furthermore Pan et al [20] put forward the slidingmode observer based SMC for ET valve However comparedwith [19] the work of [20] does not reject the influences ofchattering effectively Recently Bai and Tong [21] propose theadaptive back-stepping SMC for ET system However theyassume that the throttle opening angle change is measurablewhich is not true in practice
Recently intelligent approaches have been widely usedin the engine control such as controller design parameteridentification or fault diagnosis Sheng and Bao [26] proposea fractional order fuzzy-PID controller for ET and thefruit fly optimization algorithm is used to search for theoptimal values of the controller parameters However thegear backlash torque is ignored in this control strategy whichplays an important role in the controller design Wang andHuang [27] put forward an intelligent fuzzy controller witha feedforward term to deal with the nonlinear hystereticof ET Meanwhile the new closed-loop back-propagationtuning is also proposed for the fuzzy output membershipfunction to get better tracking performance Unfortunatelythe fuzzy rule for the feedforward controller is designedtoo simple to illustrate the characteristics of the nonlinearhysteresis Moreover with the development of automobileelectronic technology Yadav and Gaur [28] put the ETC intothe uncertain hybrid electric vehicle (HEV) speed controlwhere a self-tuning fuzzy PID controller and a special slidingmode adaptation mechanism are developed to achieve therobust performance of the ET controlled HEV Howeverthe use of the sign function in the SMC brings high-frequency chattering which usually causes serious problemsfor actuators in real applications
Since it is extremely difficult to measure those signalsincluding the opening angle change of ET the nonlinearfactors and external disturbance Hu et al [4] use a reduced-order observer to estimate the throttle opening angle changeThereafter a back-stepping controller is designed for ETCbased on Lyapunov techniques However the accuracy of theproposed method relies heavily on the precise information ofthe throttle thus its robustness to estimation error should beimproved Moreover the effect of torque caused by air flowand parameters variation is ignored in the algorithm whichis significant for the practical performance of the ETC
Regarding the aforementioned issues an extended stateobserver (ESO) based adaptive back-stepping sliding modecontroller for ET valve is proposed in this paper and thenan adaptive control law is further designed using Lyapunov-based techniques Finally the numerical experiments areconducted and the results show that the combination of
MR
uMicrocontroller
Bipolar chopper
Car battery
ia
120596m
Gearbox
Electronic throttle bodyValveplate
Returnspring
Air inflowPositionsensor
120579
Figure 1 The control structure of ET
the adaptive back-stepping and SMC can improve the per-formance of ETC in terms of the steady error and the risingtime
The rest of this paper is organized as follows Section 2describes themathematicalmodel of the ET system includingfriction nonlinear spring and gear backlash Section 3designs an ESO for ET Section 4 proposes an adaptive back-stepping SMC controller Section 5 performs simulation-based numerical experiments and compares the performanceof the proposed controller with that of BSC controllers Thefinal section provides some concluding remarks
2 Model
As shown in Figure 1 ET valve consists of a DC motor agearbox a valve plate a position sensor and a dual returnspring [11]
According to Kirchhoff rsquos law the model of the motorwinding circuit is as follows [4]
119871119886
d119894119886
d119905+ 119877119886119894119886= 119896ch119906 minus 119896V
120579119898 (1)
where 119871119886and 119877
119886are the armature inductance and the
overall resistance of the armature circuit respectively And119894119886 119906 represent the dc motor armature current and the input
control voltage respectively 119896ch and 119896V denote the choppergain and the electromotive force constant and 120579
119898is themotor
angular velocityIn terms of the torque balance principle the dynamic
characteristic of throttle valve is given by [4]
1198691198962
119897
120579 = 119896119897119896119905119894119886minus 119879119904minus 119879119891minus 119879119897 (2)
where 120579 is the position (opening angle) of throttle valve 119869 isthe overall moment of inertia with respect to the motor side119896119905is motor torque constant 119879
119904is the throttle return spring
torque 119879119897is the torque caused by the air flow and 119896
119897= 120579119898120579
is gear ratio 119879119891is frictional torque caused by Coulomb and
sliding friction as follows [4]
119879119891= 119896119905119891
sgn ( 120579) + 119896119891
120579 (3)
where 119896119905119891
is Coulomb friction coefficient and 119896119891is sliding
friction coefficient In addition the throttle return springtorque 119879
119904is given by [4]
119879119904= 119896sp (120579 minus 1205790) + 119896pre sgn (120579 minus 1205790) (4)
Mathematical Problems in Engineering 3
where 119896sp is spring elastic coefficient 119896pre is the springtightening torque coefficient and 120579
0is the default opening
angle of the ETThe system sampling time is chosen with respect to the
dominant time constant of the linearized ET model and isset to 119879 = 5ms [12] The armature current dynamics can beneglected since the time constant119879
119886= 119871119886119877119886le 119879Therefore
(1) can be simplified as [12 15]
119894119886=
1
119877119886
(119896ch119906 minus 119896V120579119898) (5)
Based on (2)ndash(5) the ET model is
120579 =1
1198962
119897119869[119896119897119896119905119896ch
119877119886
119906 minus (1198962
119897119896119905119896V
119877119886
+ 119896119891) 120579 minus 119896pre sgn (120579 minus 1205790)
minus 119896sp (120579 minus 1205790) minus 119896119905119891 sgn ( 120579) minus 119879119897]
(6)
Then let 1199091= 120579 and 119909
2= 120579 the state-space expression of
(6) can be written as
[
1
2
] =[[
[
0 1
minus119896sp
1198962
119897119869
1198601
]]
]
[
1199091
1199092
] + [
0
119861] 119906 + [
0
119862 (1199091 1199092)] (7)
where 1198601= minus(119896
2
119897119896119905119896V + 119896
119891119877119886)1198962
119897119869119877119886 119861 = 119896
119905119896ch119896119897119869119877119886 and
119862(1199091 1199092) = (minus119896pre sgn(120579minus1205790)+119896sp1205790)119896
2
119897119869minus(119896119905119891sgn( 120579)+119879
119897)
1198962
119897119869Let 119889(119905) represent the total disturbance including the
combining the sgn( 120579) unknown 119879119897(the torque caused by the
air flow) and the external disturbance we can rewrite (7)withconsideration that the Coulomb friction coefficient 119896
119905119891is very
small as follows
[
1
2
] =[[
[
0 1
minus119896sp
1198962
119897119869
1198601
]]
]
[
1199091
1199092
] + [
0
119861] 119906 + [
0
119862 (1199091)] + [
0
119889 (119905)]
(8)
where 1198601= minus(119896
2
119897119896119905119896V + 119896
119891119877119886)1198962
119897119869119877119886 119861 = 119896
119905119896ch119896119897119869119877119886 and
119862(1199091) = (minus119896pre sgn(120579 minus 1205790) + 119896sp1205790)119896
2
119897119869
Taking the parametric variations of ET into considera-tion (8) can be further rewritten as
1= 1199092
2= (119860 + Δ119860) 119909 + (119861 + Δ119861) 119906 + 119889 (119905)
(9)
where 119860 = [minus(120587119896sp + 2119896119896pre)1205871198962
119897119869 1198601] 119889(119905) = ((120587119896sp +
2119896119896pre)1205871198962
119897119869) 1205790+ 119889(119905) 119896 gt 0
Further we have2= 119860119909 + 119861119906 + 119865 (10)
where 119865 is the total uncertainty given by
119865 = Δ119860x + Δ119861119906 + 119889 (119905) (11)
where |119865| le 119865 Δ119860 and Δ119861 are the system parametricuncertainties
3 Extended State Observer Design
Since ESO can estimate the system states as well as distur-bance we use the ESO to estimate the opening angle changeof ET [29ndash31] Based on (8) the nonlinear system is designedas follows [29]
_1199091=
_1199092minus 1198921(_1199091minus 1199091)
_1199092=
_1199093minus 1198922(_1199091minus 1199091) + 119861119906
_1199093= minus 119892
3(_1199091minus 1199091)
(12)
where 1199093= (minus119896sp119896
2
119897119869)1199091+ 119862(119909
1) + 119889(119905) In order to facilitate
analysis we also define 119892119894(119911) = 119897
119894119892(119911) (119894 = 1 2 3) and 119892(119911)
is a nonlinear function Hence the ESO can be expressed asfollows [29]
_1199091=
_1199092minus 11989711198921(_1199091minus 1199091)
_1199092=
_1199093minus 11989721198922(_1199091minus 1199091) + 119861119906
_1199093= minus 11989731198923(_1199091minus 1199091)
(13)
Defining 1205751199091=
_1199091minus 1199091 1205751199092=
_1199092minus 1199092 1205751199093=
_1199093minus 1199093
then based on (8) and (13) we can obtain
1205751= 1205751199092minus 11989711198921(1205751199091)
1205752=
_1199092minus 11989721198922(1205751199091) + 119861119906
1205753= minus 11989731198923(1205751199091) minus 3
(14)
where 3is derivative of 119909
3
Assume that 3is bounded and the nonlinear function
119892(119911) is smooth that is 119892(0) = 0 and 119892(119911) = 0 Hence (14)can be rewritten as follows
1205751= 1205751199092minus 11989711198921(1205751199091) 1205751199091
1205752=
_1199092minus 11989721198922(1205751199091) 1205751199091+ 119861119906
1205753= minus 11989731198923(1205751199091) 1205751199091minus 3
(15)
Suppose
119897119894=
119886119894
119892 (1205751199091)
(119894 = 1 2 3) (16)
Substituting (16) into (15) the state-space equation of (15)can be expressed as
[[
[
1205751
1205752
1205753
]]
]
=[[
[
minus11988611 0
minus11988620 1
minus11988630 0
]]
]
[[
[
1205751199091
1205751199092
1205751199093
]]
]
+[[
[
0
0
minus1
]]
]
3 (17)
4 Mathematical Problems in Engineering
ESO
u
+
+
minus
minus
120579dx1z1
+
Back-steppingDuduce
slidingsurface
Adaptive back-steppingsliding mode controller
Adaptive back-steppingsliding mode controller
Lyapunov stabilityanalysis
Adaptive law
x2
x1
Figure 2 Control strategy
Define
P =[[
[
minus11988611 0
minus11988620 1
minus11988630 0
]]
]
E =[[
[
0
0
minus1
]]
]
120575X = (120575119909112057511990921205751199093)T
(18)
Then (17) can be rewritten as
120575X = P120575X + E3 (19)
It is shown from (19) that 119897119894(119894 = 1 2 3) can be determined
by 119886119894(119894 = 1 2 3) Hence we could choose appropriate
parameters 119886119894(119894 = 1 2 3) to guarantee the closed-loop
stability of system (19)Submitting (16) into (12) the ESO can be obtained as
follows_1199091=
_1199092minus
1198861
119892 (_1199091minus 1199091)
119892 (_1199091minus 1199091)
_1199092=
_1199093minus
1198862
119892 (_1199091minus 1199091)
119892 (_1199091minus 1199091) + 119861119906
_1199093= minus
1198863
119892 (_1199091minus 1199091)
119892 (_1199091minus 1199091)
(20)
where the nonlinear function119892(119895) satisfies the following threeconditions [29]
(i) 119892(119895) is continuously differentiable(ii) 119892(0) = 0(iii) d119892(119895)d119895 = 0
4 Adaptive Back-Stepping SMC Design
To overcome the disturbance and ensure the robustness ofcontroller [32ndash34] we design the adaptive back-steppingcontroller with SMC for the ET system Figure 2 illustratesthe control strategy where
_1199092is the estimation of opening
angle change for the ETThe back-stepping technique consists of a step-by-step
construction of a new systemwith state variables 119911119894= 119909119894minus119909119889119894
with 119909119889119894
being the desired value for state 119909119894 Let the desired
ET angle be 120579119889 and we start by constructing the first state
variable 1199111as the tacking error
1199111= 1199091minus 120579119889 (21)
Then we will design the second desired state 1199091198892(119905) such that
the state 1199111satisfies
1= minus11988811199111if 1199092(119905) = 119909
1198892(119905) where 119888
1is a
positive constant Then it follows from (21) and (9) that 1=
1199092minus 120579119889= 1199091198892minus 120579119889= minus11988811199111 Hence we have 119909
1198892= minus11988811199111+ 120579119889
and the second system state variable 1199112is constructed as
1199112= 1199092minus 1199091198892
= 1199092minus 120579119889+ 11988811199111 (22)
The candidate Lyapunov function can be chosen as [35]
1198811=1
21199112
1 (23)
Then we have
1= 11991111= 1199111(1199092minus 120579119889) (24)
Based on the fact that 1199112= 1199092minus 120579119889+ 11988811199111 we know that
1=
1199092minus 120579119889= 1199112minus 11988811199111 thus it is obtained that
1= 11991111= 11991111199112minus 11988811199112
1 (25)
To facilitate subsequent development a sliding surface interms of 119911
1and 1199112is defined as follows
119878 = 11989611199111+ 1199112 (26)
where 1198961gt 0
Remark 1 It is worthwhile to point out that in generalthe sliding mode surface is usually defined as 119878 = 119911
2for
traditional back-stepping based SMC [36] for which it isrequired to guarantee that the system state converges to thesliding mode surface 119878 = 119911
2= 0 in finite time and
then we can derive from (25) that 1199111will be stabilized to
origin However unlike the traditional approach we definethe sliding surface as 119878 = 119896
11199111+ 1199112in (26) other than
119878 = 1199112 and it is shown in the subsequent Theorems 2 and 3
that 1199111(119905) 1199112(119905) and 119878(119905) will asymptotically converge to zero
simultaneously which relaxes the finite-time requirement forthe sliding surface in the traditional design
Mathematical Problems in Engineering 5
Inspired by the Lyapunov-based control design methodsa controller with the capability of disturbance rejection andstrong robustness is designed as follows
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860x minus 119888
11+ 120579119889minus 119865 sgn (119878)
minus 120581 (119878 + 120578 sgn (119878))] (27)
where 120581 gt 0 120578 gt 0
Theorem 2 With the proposed controller in (27) if thefollowing condition is satisfied
|119876| gt 0 (28)
with
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(29)
Then the closed-loop system is Lyapunov stable in the sense that
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(30)
Proof Based on (23) a candidate Lyapunov function can bechosen as [37]
1198812= 1198811+1
21198782
(31)
Then
2= 1+ 119878 119878 = 119911
11199112minus 11988811199112
1+ 119878 (119896
11+ 2)
= 11991111199112minus 11988811199112
1
+ 119878 (1198961(1199112minus 11988811199111) + 119860x + 119861119906 + 119865 minus 120579
119889+ 11988811)
(32)
Based on (32) let
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860x minus 119888
11+ 120579119889minus 119865 sgn (119878)
minus 120581 (119878 + 120578 sgn (119878))] (33)
where 120581 gt 0 120578 gt 0 then
2= 1+ 119878 119878
= 11991111199112minus 11988811199112
1
+ 119878 (1198961(1199112minus 11988811199111) + 119860x + 119861119906 + 119865 minus 120579
119889+ 11988811)
= 11991111199112minus 11988811199112
1minus 1205811198782
minus 120581120578 |119878| + 119865119878 minus 119865 |119878|
le minus 11988811199112
1+ 11991111199112minus 1205811198782
minus 120581120578 |119878|
(34)
Let
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(35)
Hence
119911T119876119911 = [119911
11199112][[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
[
1199111
1199112
]
= 11988811199112
1minus 11991111199112+ 1205811198962
11199112
1+ 2120581119896
111991111199112+ 1205811199112
2
= 11988811199112
1minus 11991111199112+ 1205811198782
(36)
where 119911T = [11991111199112] Consider
|119876| = 120581 (1198881+ 1205811198962
1) minus (120581119896
1minus1
2)
2
= 120581 (1198881+ 1205811198961) minus
1
4 (37)
If 120581 1198881 and 119896
1are designed reasonably to ensure |119876| gt 0 then
119876 is a positive definite matrix Consequently
2le minus119911
T119876119911 minus 120581120578 |119878| le 0 (38)
According to 2le 0 we know that 119881
2is a nonincreasing
function when 119905 isin [0infin) so 1198812(119905) le 119881
2(0) lt infin
Since2= 11199112+ 11991112minus 2119888111991111minus 120581119878 119878 minus 120581120578 119878 sgn (119878)
+ 119865 119878 minus 119865 119878 sgn (119878) (39)
Based on (21) (26) and (32) we know that 1199111(119905) 1199112(119905) and
119878(119905) are bounded when 119905 ge 0 Since 1(119905) = 119911
2minus 11988811199111 we
know that 1(119905) isin L
infin Assuming that 120579
119889 120579119889 120579119889isin Linfin it
is known from 2(119905) =
2minus 120579119889minus 11988811that
2(119905) isin L
infin
Furthermore based on (39) we know that 2is uniformly
continuous because 2isin Linfin
In addition we have
int
infin
0
100381610038161003816100381610038162
10038161003816100381610038161003816d119905 = 10038161003816100381610038161198812 (infin)
1003816100381610038161003816 minus10038161003816100381610038161198812 (0)
1003816100381610038161003816 lt infin (40)
According to (40) we know that 2
isin L2 Hence we
know that lim119905rarrinfin
2= 0 based on Barbalatrsquos Lemma [38]
Moreover we know from 2le minus119911
T119876119911 minus 120581120578|119878| le 0 that
lim119905rarrinfin
2(119905) le lim
119905rarrinfin(minus119911
T119876119911 minus 120581120578|119878|) le 0 thus we
have lim119905rarrinfin
(119911T119876119911 + 120581120578|119878|) = 0 Consequently we have
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin1199112(119905) = 0 lim
119905rarrinfin119878(119905) = 0
Furthermore if the parametric uncertainties in ET areconsidered an adaptive controller is designed as follows
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860xminus
_119865 + 120579119889minus 11988811
minus 120581 (119878 + 120578 sgn (119878))]
=119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091minus
_119865 +
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
1199092
+ 120579119889minus (1198961+ 1198881) 1199092+ 119896111988811199111+ (1198961+ 1198881) 120579119889
minus 120581 (119878 + 120578 sgn (119878))]
(41)
6 Mathematical Problems in Engineering
where_119865 is the estimation of 119865 and the parameter updating
law is designed as
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) + 1199092minus 120579119889] (42)
Theorem 3 With the proposed adaptive controller in (41) andthe parameter estimation law in (42) if |119876| gt 0 with
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(43)
then the closed-loop system is stable in the sense that
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(44)
Proof Firstly we assume that the parametric uncertaintiesand external disturbance change slowly then = 0 Todesign the controller with adaptive capability of parametricuncertainties the candidate Lyapunov function is defined asfollows [37]
1198813= 1198812+
1
21205821198652
(45)
where 119865 = 119865 minus_119865 and
_119865 is the estimation of 119865 120582 gt 0 Then
3= 2minus1
120582119865_119865
= 11991111199112minus 11988811199112
1
+ 119878 [1198961(1199112minus 11988811199111) + 119860x + 119861119906 +
_119865 minus 120579
119889+ 11988811]
minus1
120582119865(
_119865 minus 120582119878)
(46)
Based on (46) we let
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860xminus
_119865 + 120579119889minus 11988811
minus 120581 (119878 + 120578 sgn (119878))]
=119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091minus
_119865 +
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
1199092
+ 120579119889minus (1198961+ 1198881) 1199092+ 119896111988811199111+ (1198961+ 1198881) 120579119889
minus 120581 (119878 + 120578 sgn (119878))]
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) + 1199092minus 120579119889]
(47)
Hence substituting (47) into (46) we have
3= 2minus1
120582119865_119865 = 119911
11199112minus 11988811199112
1minus 1205811198782
minus 120581120578 |119878| (48)
0 t
Clock To workspace
State
To workspace
Input Signal
Throttle Controller
Throttle Observer
Throttle Plant
Equation (51)
Equation (20)
Equation (8)
Figure 3 Simulink main program
According to (36) we can rewrite (48) as
3le minus119911
TQ119911 minus 120581120578 |119878| (49)
If 119876 is a positive definite matrix then 3le 0 Hence the
proposed adaptive controller is Lyapunov stableSimilar to the proof of Theorem 2 then we can use
Barbalatrsquos Lemma to obtain that [38]
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(50)
Based on the above discussion if the immeasurablevariable 119909
2in (47) is replaced with the estimation value
_1199092 we can obtain the back-stepping SMC incorporating the
proposed ESO as follows
119906 =119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091+
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
_1199092minus
_119865
+ 120579119889minus (1198961+ 1198881)_1199092+ (1198961+ 1198881) 120579119889+ 119896111988811199111
minus 120581 (119878 + 120578 sgn (119878))]
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) +
_1199092minus 120579119889]
(51)
5 Numerical Experiments
51 Simulations In order to verify the effectiveness of theproposed controller the simulation of ETC is conductedunder the MatlabSimulink platform based on the dynamiccharacteristics of ET valve In addition we choose 119892(119895) =
(1minus119890minus119895
)(1+119890minus119895
)Thewhole Simulinkmain program is shownin Figure 3 and the basic parameter configuration of ET islisted in Table 1
According to the requirement of ETC in engineeringapplications given in [12] the reference inputs are chosen asthe step and sine signals respectively Figure 4 depicts thesignal tracking results using the step reference signal whenthe desired throttle opening is 60∘ Figure 4 shows that theposition of ET is able to track the reference signal withoutovershoot within 100ms while the tracking results with
Mathematical Problems in Engineering 7
Table 1 Basic parameter comfiguration of ET
Parameters Value Units1205790
2 deg119896119897
1695 mdash119896119905
0016 NsdotmA119896pre 0107 Nsdotm119877119886
28 Ω
119869 4 times 10minus6 kgsdotm2
119896119905119891
00048 Nsdotm119896ch 24 mdash119896V 0016 Vsdotsrad119896119891
4 times 10minus4 Nsdotmsdotsrad119896sp 00247 Nsdotmrad
0 02 04 06 08 10
10
20
30
40
50
60
70
Time (s)
Desired inputActual output
001 002 003 004 005505254565860
Thro
ttle a
ngle
(deg
)
Figure 4 Step tracking response
the sine reference signal are shown in Figure 5 FromFigures 4and 5 the results show that the proposed controller can satisfythe ET tracking control requirement in [12] with the step andsine reference signals
As foregoing discussion those parameters (119896119905 119896119905119891 119896sp) are
designed using Lyapunov techniques Figure 6 is the stepresponse of ETC with parametric uncertainties when desiredthrottle opening is 60∘ and the parameters Δ119896
119905= plusmn00048
Δ119896119905119891
= plusmn00014 Δ119896sp = plusmn00074 Figure 6 shows that thesettling time of ETC is less than 100ms Figure 6 also showsthat the steady-state error of ETC tends to zero Figure 7 isthe adaptive estimation value of the total uncertainty 119865 Inaddition the results form Figure 6 show that the proposedcontroller has a better robustness compared with Figure 4
The discussion mentioned above demonstrates that theproposed controller has strong robustness with respect toparametric uncertaintiesThat is to say a stable vehicle speedcan be guaranteed since the adaptive controller can quicklyadjust the opening angle of ET valve when an externaldisturbance occurs
0 005 01202530354045
0 02 04 06 08 1
0
10
20
30
40
50
60
70
Time (s)
Desired inputActual output
minus10
Thro
ttle a
ngle
(deg
)
Figure 5 Sine tracking response
0
20
40
60
80
0 002 004 006565860
0 002 004 006
0 02 04 06 08 1Time (s)
0 02 04 06 08 1Time (s)
Desired inputActual output
minus60
minus40
minus20
0
20
minus6minus4minus20
Trac
king
erro
rs (d
eg)
Thro
ttle a
ngle
(deg
)
Figure 6 Step tracking response of parameters changes
In practical application the mutation of throttle openingis inevitable which has important influence on vehicle accel-erationdeceleration Furthermore traffic congestion willlead to the stop-and-go phenomenon in traffic flow furtherresulting in the vehicle speed change Hence ET should havegood responsiveness capability to track the change
Therefore it is significant to conduct analysis on the con-troller performance under the condition of input signalmuta-tion Moreover the nonlinear spring does not allow openingangles below 5∘ and above 80∘ [20] the experiment under theminimum and maximum values of square reference signalis set as 10∘ and 60∘ respectively as shown in Figure 8Figure 8 shows that the proposed controller can track thesmall values accurately (the important condition of idle speedcontrol) so does the large values (the essential condition of
8 Mathematical Problems in Engineering
Table 2 Controller performance comparison
Control methods Setting time Steady-state errors under parameter change OvershootBack-stepping control in [4] lt140ms lt2∘ a littleController of this present paper lt100ms lt01∘ little
F ad
aptiv
e val
ue
0 02 04 06 08 1Time (s)
minus1400
minus1200
minus1000
minus800
minus600
minus400
minus200
0
Figure 7 Estimation of 119865
0
20
40
60
80
0 02 04 06 08 1Time (s)
Desired inputActual output
Trac
king
erro
rs (d
eg)
0 02 04 06 08 1Time (s)
minus100
minus50
0
50
100
Thro
ttle a
ngle
(deg
)
Figure 8 Square wave tracking response
vehicle acceleration) In addition the settling time is less thanrequired 100ms On the other hand Figure 8 also showsthat the steady-state errors approximate 0 which illustratesthat the proposed controller can satisfy the requirement ofETC Hence the results from this simulation show that thedesigned controller also has a good control performanceunder square wave input signal It also implies that the vehiclein the platoon can follow the preceding vehicles with safe
space headway and safe speed via ETC when the stop-and-go phenomenon emerges
52 Performance Comparison Compared with the literature[4] this study considers not only the external disturbancebut also the parametric uncertainties and the torque causedby the air flow Then the adaptive law is designed using theLyapunov techniques Finally the experiment is conductedusing simulation and the comparison results are summarizedin Table 2 Table 2 shows that the proposed adaptive back-stepping SMC has better control performance than the back-stepping controller in [4] in terms of the settling time steady-state error and the overshoot
53 Simulated Experiment In this section we incorporatethe ET controller withmean valuemodeling of spark ignitionengine under the conditions of pressing the accelerator pedaland easing it off [39] The schematic block diagram of mainsimulation is shown in Figure 9 Figure 10 shows the throttleopening angle tracking performance It can be seen thatthe proposed controller can track the desired input signaleffectively Figures 11 12 and 13 show the manifold pressureengine speed and throttle airflow respectively The resultsshow that the proposed controller can control the engineaccurately via ETC
6 Conclusions
To improve the accuracy of the information for ETC underV2V communications an ESO based adaptive back-steppingSMC is proposed based on the Lyapunov theory in thepresence of high nonlinearity of ET and immeasurable signalsfor throttle opening angle change In addition with thedesigned adaptive law strong robustness to parametric uncer-tainties and external disturbance can be achieved Simulationresults show that the proposed controller can track thedesired reference input signal fast and accurately with strongrobustness to uncertainties and disturbances
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thiswork is jointly supported by theNationalNatural ScienceFoundation of China (Grant no 61304197) the Scientific and
Mathematical Problems in Engineering 9
Desiredinput
Mean valueModelling of spark
Ignition engines
Actual output
Manifold pressureEngine speedThrottle airflow
+
minus
Throttle Controller Throttle Model
Equation (51) Equation (8)
Figure 9 Schematic block diagram of main simulation
0 2 4 6 8 10Time (s)
0
10
20
30
40
50
60
70
Thro
ttle a
ngle
(deg
)
Desired inputActual output
Figure 10 Throttle opening angle
0 2 4 6 8 104
5
6
7
8
9
10
Man
ifold
pre
ssur
e (pa
)
Time (s)
times104
Figure 11 Manifold pressure
Technological Talents of Chongqing (Grant no cstc2014kjrc-qnrc30002) the Key Project of Application andDevelopmentof Chongqing (Grant no cstc2014yykfB40001) the NatureScience Funds of Education Committee of Chongqing (Grantno KJ130506) Natural Science Funds of Chongqing (Grantnos cstc2014jcyjA60003 and cstc2012jjA40035) and Natural
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Engi
ne sp
eed
(rpm
)
0 2 4 6 8 10Time (s)
Figure 12 Engine speed
Thro
ttle a
irflow
(gs
)
0 2 4 6 8 10Time (s)
minus15
minus10
minus5
0
5
10
15
20
25
Figure 13 Throttle airflow
Science Funds of CQUPT (Grant nos A2012-78 and A2013-27) The authors would like to express their gratitude toDr Hongchun Qu and Dr Xiaoming Tang from ChongqingUniversity of Posts and Telecommunications for their gooddiscussions on the paper preparation
References
[1] V Milanes S E Shladover J Spring C Nowakowski HKawazoe and M Nakamura ldquoCooperative adaptive cruise
10 Mathematical Problems in Engineering
control in real traffic situationsrdquo IEEETransactions on IntelligentTransportation Systems vol 15 no 1 pp 296ndash305 2014
[2] D-H Sun Y-F Li W-N Liu M Zhao and X-Y Liao ldquoResearch summary on transportation cyber physical systems andthe challenging technologiesrdquo China Journal of Highway andTransport vol 26 no 1 pp 144ndash154 2013
[3] L Li D Wen and D Yao ldquoA survey of traffic control withvehicular communicationsrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 425ndash432 2014
[4] Y FHuC Li J LiH YGuo P Y Sun andHChen ldquoObserver-based output feedback control of electronic throttlesrdquo ActaAutomatica Sinica vol 37 no 6 pp 746ndash754 2011
[5] P Ioannou and Z Xu ldquoThrottle and brake control system forautomatic vehicle followingrdquo Journal of Intelligent Transporta-tion Systems vol 1 no 4 pp 345ndash377 1994
[6] Y Li and D Sun ldquoMicroscopic car-following model for thetraffic flow the state of the artrdquo Journal of Control Theory andApplications vol 10 no 2 pp 133ndash143 2012
[7] T Tang W Shi H Shang and Y Wang ldquoA new car-followingmodel with consideration of inter-vehicle communicationrdquoNonlinear Dynamics vol 76 no 4 pp 2017ndash2023 2014
[8] J Ploeg N Van DeWouw and H Nijmeijer ldquoLp string stabilityof cascaded systems application to vehicle platooningrdquo IEEETransactions on Control Systems Technology vol 22 no 2 pp786ndash793 2014
[9] W Wang S S Liao X Li and J S Ren ldquoThe processof information propagation along a traffic stream throughintervehicle communicationrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 345ndash354 2014
[10] L Xiao and F Gao ldquoPractical string stability of platoon of adap-tive cruise control vehiclesrdquo IEEE Transactions on IntelligentTransportation Systems vol 12 no 4 pp 1184ndash1194 2011
[11] X F Yuan Y N Wang L H Wu X Z Zhang and WSun ldquoNeural network based self-learning control strategy forelectronic throttle valverdquo IEEE Transactions on Vehicular Tech-nology vol 59 no 8 pp 3757ndash3765 2010
[12] J Deur D Pavkovic N Peric M Jansz and D Hrovat ldquoAnelectronic throttle control strategy including compensation offriction and limp-home effectsrdquo IEEE Transactions on IndustryApplications vol 40 no 3 pp 821ndash834 2004
[13] D Pavkovic J DeurM Jansz andN Peric ldquoAdaptive control ofautomotive electronic throttlerdquo Control Engineering Practicevol 14 no 2 pp 121ndash136 2006
[14] X Yuan and Y Wang ldquoA novel electronic-throttle-valve con-troller based on approximate model methodrdquo IEEE Transac-tions on Industrial Electronics vol 56 no 3 pp 883ndash890 2009
[15] M Vasak M Baotic MMorari I Petrovic and N Peric ldquoCon-strained optimal control of an electronic throttlerdquo InternationalJournal of Control vol 79 no 5 pp 465ndash478 2006
[16] M Vasak M Baotic I Petrovic and N Peric ldquoHybrid theory-based time-optimal control of an electronic throttlerdquo IEEETransactions on Industrial Electronics vol 54 no 3 pp 1483ndash1494 2007
[17] D Kim H Peng S Bai and J M Maguire ldquoControl ofintegrated powertrain with electronic throttle and automatictransmissionrdquo IEEE Transactions on Control Systems Technol-ogy vol 15 no 3 pp 474ndash482 2007
[18] K Nakano U Sawut K Higuchi and Y Okajima ldquoModellingand observer-based sliding-mode control of electronic throttlesystemrdquo ECTI Transactions on Electrical Engineering Electron-ics and Communications vol 4 no 1 pp 22ndash28 2006
[19] M Horn and M Reichhartinger ldquoSecond-order sliding modecontrol of electronic throttle valvesrdquo in Proceedings of the IEEE10th International Workshop on Variable Structure Systems (VSSrsquo08) pp 280ndash284 IEEE Antalya Turkey June 2008
[20] Y D Pan U Ozguner and O H Dagci ldquoVariable-structurecontrol of electronic throttle valvesrdquo IEEE Transactions onIndustrial Electronics vol 55 no 11 pp 3899ndash3907 2008
[21] R Bai and S Tong ldquoAdaptive backstepping sliding-mode con-trol of the electronic throttle system in modern automobilesrdquoMathematical Problems in Engineering vol 2014 Article ID383064 8 pages 2014
[22] X Yuan Y Wang and L Wu ldquoSVM-based approximate modelcontrol for electronic throttle valverdquo IEEE Transactions onVehicular Technology vol 57 no 5 pp 2747ndash2756 2008
[23] M Baric I Petrovic and N Peric ldquoNeural network-basedsliding mode control of electronic throttlerdquo Engineering Appli-cations of Artificial Intelligence vol 18 no 8 pp 951ndash961 2005
[24] M Nentwig and P Mercorelli ldquoThrottle valve control using aninverse local linear model tree based on a Fuzzy neural net-workrdquo inProceedings of the 7th IEEE International Conference onCybernetic Intelligent Systems (CIS rsquo08) pp 1ndash6 London UKSeptember 2008
[25] M Baric I Petrovic and N Peric ldquoNeural network based slid-ingmode controller for a class of linear systemswith unmatcheduncertaintiesrdquo in Proceedings of the 41st IEEE Conference onDecision and Control vol 1 pp 967ndash972 Las Vegas Nev USADecember 2002
[26] W Sheng and Y Bao ldquoFruit fly optimization algorithm basedfractional order fuzzy-PID controller for electronic throttlerdquoNonlinear Dynamics vol 73 no 1-2 pp 611ndash619 2013
[27] C-H Wang and D-Y Huang ldquoA new intelligent fuzzy con-troller for nonlinear hysteretic electronic throttle in modernintelligent automobilesrdquo IEEE Transactions on Industrial Elec-tronics vol 60 no 6 pp 2332ndash2345 2013
[28] A K Yadav and P Gaur ldquoRobust adaptive speed control ofuncertain hybrid electric vehicle using electronic throttle con-trol with varying road graderdquo Nonlinear Dynamics vol 76 no1 pp 305ndash321 2014
[29] Z J Kang and X Y Chen ldquoA design method of nonlinearextension state observerrdquo Electric Machines and Control vol 5no 3 pp 199ndash203 2001
[30] A A Godbole J P Kolhe and S E Talole ldquoPerformanceanalysis of generalized extended state observer in tacklingsinusoidal disturbancesrdquo IEEE Transactions on Control SystemsTechnology vol 21 no 6 pp 2212ndash2223 2013
[31] Z Gao X Dai T Breikin and H Wang ldquoNovel parameteridentification by using a high-gain observer with applicationto a gas turbine enginerdquo IEEE Transactions on IndustrialInformatics vol 4 no 4 pp 271ndash279 2008
[32] M Morawiec ldquoThe adaptive backstepping control of perma-nent magnet synchronous motor supplied by current sourceinverterrdquo IEEE Transactions on Industrial Informatics vol 9 no2 pp 1047ndash1055 2013
[33] J R Dominguez A Navarrete M A Meza A G Loukianovand J Canedo ldquoDigital sliding-mode sensorless control forsurface-mounted PMSMrdquo IEEE Transactions on IndustrialInformatics vol 10 no 1 pp 137ndash151 2014
[34] D Zhao T Zou S Li and Q Zhu ldquoAdaptive backsteppingsliding mode control for leader-follower multi-agent systemsrdquoIET Control Theory amp Applications vol 6 no 8 pp 1109ndash11172012
Mathematical Problems in Engineering 11
[35] Y C Fang P C Wang N Sun and Y C Zhang ldquoDynamicsanalysis and nonlinear control of an offshore boom cranerdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 414ndash4272014
[36] Y Xia Z Zhu and M Fu ldquoBack-stepping sliding mode controlfor missile systems based on an extended state observerrdquo IETControl Theory amp Applications vol 5 no 1 pp 93ndash102 2011
[37] N Sun Y C Fang and H Chen ldquoA new antiswing controlmethod for underactuated cranes with unmodeled uncer-tainties theoretical design and hardware experimentsrdquo IEEETransactions on Industrial Electronics vol 62 no 1 pp 453ndash4652015
[38] X Zhang Y Fang andN Sun ldquoMinimum-time trajectory plan-ning for underactuated overhead crane systems with state andcontrol constraintsrdquo IEEETransactions on Industrial Electronicsvol 61 no 12 pp 6915ndash6925 2014
[39] E Hendricks and S C Sorenson ldquoMean value modelling ofspark ignition enginesrdquo SAE Technical Paper 900616 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
where 119896sp is spring elastic coefficient 119896pre is the springtightening torque coefficient and 120579
0is the default opening
angle of the ETThe system sampling time is chosen with respect to the
dominant time constant of the linearized ET model and isset to 119879 = 5ms [12] The armature current dynamics can beneglected since the time constant119879
119886= 119871119886119877119886le 119879Therefore
(1) can be simplified as [12 15]
119894119886=
1
119877119886
(119896ch119906 minus 119896V120579119898) (5)
Based on (2)ndash(5) the ET model is
120579 =1
1198962
119897119869[119896119897119896119905119896ch
119877119886
119906 minus (1198962
119897119896119905119896V
119877119886
+ 119896119891) 120579 minus 119896pre sgn (120579 minus 1205790)
minus 119896sp (120579 minus 1205790) minus 119896119905119891 sgn ( 120579) minus 119879119897]
(6)
Then let 1199091= 120579 and 119909
2= 120579 the state-space expression of
(6) can be written as
[
1
2
] =[[
[
0 1
minus119896sp
1198962
119897119869
1198601
]]
]
[
1199091
1199092
] + [
0
119861] 119906 + [
0
119862 (1199091 1199092)] (7)
where 1198601= minus(119896
2
119897119896119905119896V + 119896
119891119877119886)1198962
119897119869119877119886 119861 = 119896
119905119896ch119896119897119869119877119886 and
119862(1199091 1199092) = (minus119896pre sgn(120579minus1205790)+119896sp1205790)119896
2
119897119869minus(119896119905119891sgn( 120579)+119879
119897)
1198962
119897119869Let 119889(119905) represent the total disturbance including the
combining the sgn( 120579) unknown 119879119897(the torque caused by the
air flow) and the external disturbance we can rewrite (7)withconsideration that the Coulomb friction coefficient 119896
119905119891is very
small as follows
[
1
2
] =[[
[
0 1
minus119896sp
1198962
119897119869
1198601
]]
]
[
1199091
1199092
] + [
0
119861] 119906 + [
0
119862 (1199091)] + [
0
119889 (119905)]
(8)
where 1198601= minus(119896
2
119897119896119905119896V + 119896
119891119877119886)1198962
119897119869119877119886 119861 = 119896
119905119896ch119896119897119869119877119886 and
119862(1199091) = (minus119896pre sgn(120579 minus 1205790) + 119896sp1205790)119896
2
119897119869
Taking the parametric variations of ET into considera-tion (8) can be further rewritten as
1= 1199092
2= (119860 + Δ119860) 119909 + (119861 + Δ119861) 119906 + 119889 (119905)
(9)
where 119860 = [minus(120587119896sp + 2119896119896pre)1205871198962
119897119869 1198601] 119889(119905) = ((120587119896sp +
2119896119896pre)1205871198962
119897119869) 1205790+ 119889(119905) 119896 gt 0
Further we have2= 119860119909 + 119861119906 + 119865 (10)
where 119865 is the total uncertainty given by
119865 = Δ119860x + Δ119861119906 + 119889 (119905) (11)
where |119865| le 119865 Δ119860 and Δ119861 are the system parametricuncertainties
3 Extended State Observer Design
Since ESO can estimate the system states as well as distur-bance we use the ESO to estimate the opening angle changeof ET [29ndash31] Based on (8) the nonlinear system is designedas follows [29]
_1199091=
_1199092minus 1198921(_1199091minus 1199091)
_1199092=
_1199093minus 1198922(_1199091minus 1199091) + 119861119906
_1199093= minus 119892
3(_1199091minus 1199091)
(12)
where 1199093= (minus119896sp119896
2
119897119869)1199091+ 119862(119909
1) + 119889(119905) In order to facilitate
analysis we also define 119892119894(119911) = 119897
119894119892(119911) (119894 = 1 2 3) and 119892(119911)
is a nonlinear function Hence the ESO can be expressed asfollows [29]
_1199091=
_1199092minus 11989711198921(_1199091minus 1199091)
_1199092=
_1199093minus 11989721198922(_1199091minus 1199091) + 119861119906
_1199093= minus 11989731198923(_1199091minus 1199091)
(13)
Defining 1205751199091=
_1199091minus 1199091 1205751199092=
_1199092minus 1199092 1205751199093=
_1199093minus 1199093
then based on (8) and (13) we can obtain
1205751= 1205751199092minus 11989711198921(1205751199091)
1205752=
_1199092minus 11989721198922(1205751199091) + 119861119906
1205753= minus 11989731198923(1205751199091) minus 3
(14)
where 3is derivative of 119909
3
Assume that 3is bounded and the nonlinear function
119892(119911) is smooth that is 119892(0) = 0 and 119892(119911) = 0 Hence (14)can be rewritten as follows
1205751= 1205751199092minus 11989711198921(1205751199091) 1205751199091
1205752=
_1199092minus 11989721198922(1205751199091) 1205751199091+ 119861119906
1205753= minus 11989731198923(1205751199091) 1205751199091minus 3
(15)
Suppose
119897119894=
119886119894
119892 (1205751199091)
(119894 = 1 2 3) (16)
Substituting (16) into (15) the state-space equation of (15)can be expressed as
[[
[
1205751
1205752
1205753
]]
]
=[[
[
minus11988611 0
minus11988620 1
minus11988630 0
]]
]
[[
[
1205751199091
1205751199092
1205751199093
]]
]
+[[
[
0
0
minus1
]]
]
3 (17)
4 Mathematical Problems in Engineering
ESO
u
+
+
minus
minus
120579dx1z1
+
Back-steppingDuduce
slidingsurface
Adaptive back-steppingsliding mode controller
Adaptive back-steppingsliding mode controller
Lyapunov stabilityanalysis
Adaptive law
x2
x1
Figure 2 Control strategy
Define
P =[[
[
minus11988611 0
minus11988620 1
minus11988630 0
]]
]
E =[[
[
0
0
minus1
]]
]
120575X = (120575119909112057511990921205751199093)T
(18)
Then (17) can be rewritten as
120575X = P120575X + E3 (19)
It is shown from (19) that 119897119894(119894 = 1 2 3) can be determined
by 119886119894(119894 = 1 2 3) Hence we could choose appropriate
parameters 119886119894(119894 = 1 2 3) to guarantee the closed-loop
stability of system (19)Submitting (16) into (12) the ESO can be obtained as
follows_1199091=
_1199092minus
1198861
119892 (_1199091minus 1199091)
119892 (_1199091minus 1199091)
_1199092=
_1199093minus
1198862
119892 (_1199091minus 1199091)
119892 (_1199091minus 1199091) + 119861119906
_1199093= minus
1198863
119892 (_1199091minus 1199091)
119892 (_1199091minus 1199091)
(20)
where the nonlinear function119892(119895) satisfies the following threeconditions [29]
(i) 119892(119895) is continuously differentiable(ii) 119892(0) = 0(iii) d119892(119895)d119895 = 0
4 Adaptive Back-Stepping SMC Design
To overcome the disturbance and ensure the robustness ofcontroller [32ndash34] we design the adaptive back-steppingcontroller with SMC for the ET system Figure 2 illustratesthe control strategy where
_1199092is the estimation of opening
angle change for the ETThe back-stepping technique consists of a step-by-step
construction of a new systemwith state variables 119911119894= 119909119894minus119909119889119894
with 119909119889119894
being the desired value for state 119909119894 Let the desired
ET angle be 120579119889 and we start by constructing the first state
variable 1199111as the tacking error
1199111= 1199091minus 120579119889 (21)
Then we will design the second desired state 1199091198892(119905) such that
the state 1199111satisfies
1= minus11988811199111if 1199092(119905) = 119909
1198892(119905) where 119888
1is a
positive constant Then it follows from (21) and (9) that 1=
1199092minus 120579119889= 1199091198892minus 120579119889= minus11988811199111 Hence we have 119909
1198892= minus11988811199111+ 120579119889
and the second system state variable 1199112is constructed as
1199112= 1199092minus 1199091198892
= 1199092minus 120579119889+ 11988811199111 (22)
The candidate Lyapunov function can be chosen as [35]
1198811=1
21199112
1 (23)
Then we have
1= 11991111= 1199111(1199092minus 120579119889) (24)
Based on the fact that 1199112= 1199092minus 120579119889+ 11988811199111 we know that
1=
1199092minus 120579119889= 1199112minus 11988811199111 thus it is obtained that
1= 11991111= 11991111199112minus 11988811199112
1 (25)
To facilitate subsequent development a sliding surface interms of 119911
1and 1199112is defined as follows
119878 = 11989611199111+ 1199112 (26)
where 1198961gt 0
Remark 1 It is worthwhile to point out that in generalthe sliding mode surface is usually defined as 119878 = 119911
2for
traditional back-stepping based SMC [36] for which it isrequired to guarantee that the system state converges to thesliding mode surface 119878 = 119911
2= 0 in finite time and
then we can derive from (25) that 1199111will be stabilized to
origin However unlike the traditional approach we definethe sliding surface as 119878 = 119896
11199111+ 1199112in (26) other than
119878 = 1199112 and it is shown in the subsequent Theorems 2 and 3
that 1199111(119905) 1199112(119905) and 119878(119905) will asymptotically converge to zero
simultaneously which relaxes the finite-time requirement forthe sliding surface in the traditional design
Mathematical Problems in Engineering 5
Inspired by the Lyapunov-based control design methodsa controller with the capability of disturbance rejection andstrong robustness is designed as follows
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860x minus 119888
11+ 120579119889minus 119865 sgn (119878)
minus 120581 (119878 + 120578 sgn (119878))] (27)
where 120581 gt 0 120578 gt 0
Theorem 2 With the proposed controller in (27) if thefollowing condition is satisfied
|119876| gt 0 (28)
with
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(29)
Then the closed-loop system is Lyapunov stable in the sense that
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(30)
Proof Based on (23) a candidate Lyapunov function can bechosen as [37]
1198812= 1198811+1
21198782
(31)
Then
2= 1+ 119878 119878 = 119911
11199112minus 11988811199112
1+ 119878 (119896
11+ 2)
= 11991111199112minus 11988811199112
1
+ 119878 (1198961(1199112minus 11988811199111) + 119860x + 119861119906 + 119865 minus 120579
119889+ 11988811)
(32)
Based on (32) let
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860x minus 119888
11+ 120579119889minus 119865 sgn (119878)
minus 120581 (119878 + 120578 sgn (119878))] (33)
where 120581 gt 0 120578 gt 0 then
2= 1+ 119878 119878
= 11991111199112minus 11988811199112
1
+ 119878 (1198961(1199112minus 11988811199111) + 119860x + 119861119906 + 119865 minus 120579
119889+ 11988811)
= 11991111199112minus 11988811199112
1minus 1205811198782
minus 120581120578 |119878| + 119865119878 minus 119865 |119878|
le minus 11988811199112
1+ 11991111199112minus 1205811198782
minus 120581120578 |119878|
(34)
Let
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(35)
Hence
119911T119876119911 = [119911
11199112][[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
[
1199111
1199112
]
= 11988811199112
1minus 11991111199112+ 1205811198962
11199112
1+ 2120581119896
111991111199112+ 1205811199112
2
= 11988811199112
1minus 11991111199112+ 1205811198782
(36)
where 119911T = [11991111199112] Consider
|119876| = 120581 (1198881+ 1205811198962
1) minus (120581119896
1minus1
2)
2
= 120581 (1198881+ 1205811198961) minus
1
4 (37)
If 120581 1198881 and 119896
1are designed reasonably to ensure |119876| gt 0 then
119876 is a positive definite matrix Consequently
2le minus119911
T119876119911 minus 120581120578 |119878| le 0 (38)
According to 2le 0 we know that 119881
2is a nonincreasing
function when 119905 isin [0infin) so 1198812(119905) le 119881
2(0) lt infin
Since2= 11199112+ 11991112minus 2119888111991111minus 120581119878 119878 minus 120581120578 119878 sgn (119878)
+ 119865 119878 minus 119865 119878 sgn (119878) (39)
Based on (21) (26) and (32) we know that 1199111(119905) 1199112(119905) and
119878(119905) are bounded when 119905 ge 0 Since 1(119905) = 119911
2minus 11988811199111 we
know that 1(119905) isin L
infin Assuming that 120579
119889 120579119889 120579119889isin Linfin it
is known from 2(119905) =
2minus 120579119889minus 11988811that
2(119905) isin L
infin
Furthermore based on (39) we know that 2is uniformly
continuous because 2isin Linfin
In addition we have
int
infin
0
100381610038161003816100381610038162
10038161003816100381610038161003816d119905 = 10038161003816100381610038161198812 (infin)
1003816100381610038161003816 minus10038161003816100381610038161198812 (0)
1003816100381610038161003816 lt infin (40)
According to (40) we know that 2
isin L2 Hence we
know that lim119905rarrinfin
2= 0 based on Barbalatrsquos Lemma [38]
Moreover we know from 2le minus119911
T119876119911 minus 120581120578|119878| le 0 that
lim119905rarrinfin
2(119905) le lim
119905rarrinfin(minus119911
T119876119911 minus 120581120578|119878|) le 0 thus we
have lim119905rarrinfin
(119911T119876119911 + 120581120578|119878|) = 0 Consequently we have
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin1199112(119905) = 0 lim
119905rarrinfin119878(119905) = 0
Furthermore if the parametric uncertainties in ET areconsidered an adaptive controller is designed as follows
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860xminus
_119865 + 120579119889minus 11988811
minus 120581 (119878 + 120578 sgn (119878))]
=119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091minus
_119865 +
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
1199092
+ 120579119889minus (1198961+ 1198881) 1199092+ 119896111988811199111+ (1198961+ 1198881) 120579119889
minus 120581 (119878 + 120578 sgn (119878))]
(41)
6 Mathematical Problems in Engineering
where_119865 is the estimation of 119865 and the parameter updating
law is designed as
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) + 1199092minus 120579119889] (42)
Theorem 3 With the proposed adaptive controller in (41) andthe parameter estimation law in (42) if |119876| gt 0 with
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(43)
then the closed-loop system is stable in the sense that
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(44)
Proof Firstly we assume that the parametric uncertaintiesand external disturbance change slowly then = 0 Todesign the controller with adaptive capability of parametricuncertainties the candidate Lyapunov function is defined asfollows [37]
1198813= 1198812+
1
21205821198652
(45)
where 119865 = 119865 minus_119865 and
_119865 is the estimation of 119865 120582 gt 0 Then
3= 2minus1
120582119865_119865
= 11991111199112minus 11988811199112
1
+ 119878 [1198961(1199112minus 11988811199111) + 119860x + 119861119906 +
_119865 minus 120579
119889+ 11988811]
minus1
120582119865(
_119865 minus 120582119878)
(46)
Based on (46) we let
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860xminus
_119865 + 120579119889minus 11988811
minus 120581 (119878 + 120578 sgn (119878))]
=119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091minus
_119865 +
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
1199092
+ 120579119889minus (1198961+ 1198881) 1199092+ 119896111988811199111+ (1198961+ 1198881) 120579119889
minus 120581 (119878 + 120578 sgn (119878))]
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) + 1199092minus 120579119889]
(47)
Hence substituting (47) into (46) we have
3= 2minus1
120582119865_119865 = 119911
11199112minus 11988811199112
1minus 1205811198782
minus 120581120578 |119878| (48)
0 t
Clock To workspace
State
To workspace
Input Signal
Throttle Controller
Throttle Observer
Throttle Plant
Equation (51)
Equation (20)
Equation (8)
Figure 3 Simulink main program
According to (36) we can rewrite (48) as
3le minus119911
TQ119911 minus 120581120578 |119878| (49)
If 119876 is a positive definite matrix then 3le 0 Hence the
proposed adaptive controller is Lyapunov stableSimilar to the proof of Theorem 2 then we can use
Barbalatrsquos Lemma to obtain that [38]
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(50)
Based on the above discussion if the immeasurablevariable 119909
2in (47) is replaced with the estimation value
_1199092 we can obtain the back-stepping SMC incorporating the
proposed ESO as follows
119906 =119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091+
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
_1199092minus
_119865
+ 120579119889minus (1198961+ 1198881)_1199092+ (1198961+ 1198881) 120579119889+ 119896111988811199111
minus 120581 (119878 + 120578 sgn (119878))]
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) +
_1199092minus 120579119889]
(51)
5 Numerical Experiments
51 Simulations In order to verify the effectiveness of theproposed controller the simulation of ETC is conductedunder the MatlabSimulink platform based on the dynamiccharacteristics of ET valve In addition we choose 119892(119895) =
(1minus119890minus119895
)(1+119890minus119895
)Thewhole Simulinkmain program is shownin Figure 3 and the basic parameter configuration of ET islisted in Table 1
According to the requirement of ETC in engineeringapplications given in [12] the reference inputs are chosen asthe step and sine signals respectively Figure 4 depicts thesignal tracking results using the step reference signal whenthe desired throttle opening is 60∘ Figure 4 shows that theposition of ET is able to track the reference signal withoutovershoot within 100ms while the tracking results with
Mathematical Problems in Engineering 7
Table 1 Basic parameter comfiguration of ET
Parameters Value Units1205790
2 deg119896119897
1695 mdash119896119905
0016 NsdotmA119896pre 0107 Nsdotm119877119886
28 Ω
119869 4 times 10minus6 kgsdotm2
119896119905119891
00048 Nsdotm119896ch 24 mdash119896V 0016 Vsdotsrad119896119891
4 times 10minus4 Nsdotmsdotsrad119896sp 00247 Nsdotmrad
0 02 04 06 08 10
10
20
30
40
50
60
70
Time (s)
Desired inputActual output
001 002 003 004 005505254565860
Thro
ttle a
ngle
(deg
)
Figure 4 Step tracking response
the sine reference signal are shown in Figure 5 FromFigures 4and 5 the results show that the proposed controller can satisfythe ET tracking control requirement in [12] with the step andsine reference signals
As foregoing discussion those parameters (119896119905 119896119905119891 119896sp) are
designed using Lyapunov techniques Figure 6 is the stepresponse of ETC with parametric uncertainties when desiredthrottle opening is 60∘ and the parameters Δ119896
119905= plusmn00048
Δ119896119905119891
= plusmn00014 Δ119896sp = plusmn00074 Figure 6 shows that thesettling time of ETC is less than 100ms Figure 6 also showsthat the steady-state error of ETC tends to zero Figure 7 isthe adaptive estimation value of the total uncertainty 119865 Inaddition the results form Figure 6 show that the proposedcontroller has a better robustness compared with Figure 4
The discussion mentioned above demonstrates that theproposed controller has strong robustness with respect toparametric uncertaintiesThat is to say a stable vehicle speedcan be guaranteed since the adaptive controller can quicklyadjust the opening angle of ET valve when an externaldisturbance occurs
0 005 01202530354045
0 02 04 06 08 1
0
10
20
30
40
50
60
70
Time (s)
Desired inputActual output
minus10
Thro
ttle a
ngle
(deg
)
Figure 5 Sine tracking response
0
20
40
60
80
0 002 004 006565860
0 002 004 006
0 02 04 06 08 1Time (s)
0 02 04 06 08 1Time (s)
Desired inputActual output
minus60
minus40
minus20
0
20
minus6minus4minus20
Trac
king
erro
rs (d
eg)
Thro
ttle a
ngle
(deg
)
Figure 6 Step tracking response of parameters changes
In practical application the mutation of throttle openingis inevitable which has important influence on vehicle accel-erationdeceleration Furthermore traffic congestion willlead to the stop-and-go phenomenon in traffic flow furtherresulting in the vehicle speed change Hence ET should havegood responsiveness capability to track the change
Therefore it is significant to conduct analysis on the con-troller performance under the condition of input signalmuta-tion Moreover the nonlinear spring does not allow openingangles below 5∘ and above 80∘ [20] the experiment under theminimum and maximum values of square reference signalis set as 10∘ and 60∘ respectively as shown in Figure 8Figure 8 shows that the proposed controller can track thesmall values accurately (the important condition of idle speedcontrol) so does the large values (the essential condition of
8 Mathematical Problems in Engineering
Table 2 Controller performance comparison
Control methods Setting time Steady-state errors under parameter change OvershootBack-stepping control in [4] lt140ms lt2∘ a littleController of this present paper lt100ms lt01∘ little
F ad
aptiv
e val
ue
0 02 04 06 08 1Time (s)
minus1400
minus1200
minus1000
minus800
minus600
minus400
minus200
0
Figure 7 Estimation of 119865
0
20
40
60
80
0 02 04 06 08 1Time (s)
Desired inputActual output
Trac
king
erro
rs (d
eg)
0 02 04 06 08 1Time (s)
minus100
minus50
0
50
100
Thro
ttle a
ngle
(deg
)
Figure 8 Square wave tracking response
vehicle acceleration) In addition the settling time is less thanrequired 100ms On the other hand Figure 8 also showsthat the steady-state errors approximate 0 which illustratesthat the proposed controller can satisfy the requirement ofETC Hence the results from this simulation show that thedesigned controller also has a good control performanceunder square wave input signal It also implies that the vehiclein the platoon can follow the preceding vehicles with safe
space headway and safe speed via ETC when the stop-and-go phenomenon emerges
52 Performance Comparison Compared with the literature[4] this study considers not only the external disturbancebut also the parametric uncertainties and the torque causedby the air flow Then the adaptive law is designed using theLyapunov techniques Finally the experiment is conductedusing simulation and the comparison results are summarizedin Table 2 Table 2 shows that the proposed adaptive back-stepping SMC has better control performance than the back-stepping controller in [4] in terms of the settling time steady-state error and the overshoot
53 Simulated Experiment In this section we incorporatethe ET controller withmean valuemodeling of spark ignitionengine under the conditions of pressing the accelerator pedaland easing it off [39] The schematic block diagram of mainsimulation is shown in Figure 9 Figure 10 shows the throttleopening angle tracking performance It can be seen thatthe proposed controller can track the desired input signaleffectively Figures 11 12 and 13 show the manifold pressureengine speed and throttle airflow respectively The resultsshow that the proposed controller can control the engineaccurately via ETC
6 Conclusions
To improve the accuracy of the information for ETC underV2V communications an ESO based adaptive back-steppingSMC is proposed based on the Lyapunov theory in thepresence of high nonlinearity of ET and immeasurable signalsfor throttle opening angle change In addition with thedesigned adaptive law strong robustness to parametric uncer-tainties and external disturbance can be achieved Simulationresults show that the proposed controller can track thedesired reference input signal fast and accurately with strongrobustness to uncertainties and disturbances
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thiswork is jointly supported by theNationalNatural ScienceFoundation of China (Grant no 61304197) the Scientific and
Mathematical Problems in Engineering 9
Desiredinput
Mean valueModelling of spark
Ignition engines
Actual output
Manifold pressureEngine speedThrottle airflow
+
minus
Throttle Controller Throttle Model
Equation (51) Equation (8)
Figure 9 Schematic block diagram of main simulation
0 2 4 6 8 10Time (s)
0
10
20
30
40
50
60
70
Thro
ttle a
ngle
(deg
)
Desired inputActual output
Figure 10 Throttle opening angle
0 2 4 6 8 104
5
6
7
8
9
10
Man
ifold
pre
ssur
e (pa
)
Time (s)
times104
Figure 11 Manifold pressure
Technological Talents of Chongqing (Grant no cstc2014kjrc-qnrc30002) the Key Project of Application andDevelopmentof Chongqing (Grant no cstc2014yykfB40001) the NatureScience Funds of Education Committee of Chongqing (Grantno KJ130506) Natural Science Funds of Chongqing (Grantnos cstc2014jcyjA60003 and cstc2012jjA40035) and Natural
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Engi
ne sp
eed
(rpm
)
0 2 4 6 8 10Time (s)
Figure 12 Engine speed
Thro
ttle a
irflow
(gs
)
0 2 4 6 8 10Time (s)
minus15
minus10
minus5
0
5
10
15
20
25
Figure 13 Throttle airflow
Science Funds of CQUPT (Grant nos A2012-78 and A2013-27) The authors would like to express their gratitude toDr Hongchun Qu and Dr Xiaoming Tang from ChongqingUniversity of Posts and Telecommunications for their gooddiscussions on the paper preparation
References
[1] V Milanes S E Shladover J Spring C Nowakowski HKawazoe and M Nakamura ldquoCooperative adaptive cruise
10 Mathematical Problems in Engineering
control in real traffic situationsrdquo IEEETransactions on IntelligentTransportation Systems vol 15 no 1 pp 296ndash305 2014
[2] D-H Sun Y-F Li W-N Liu M Zhao and X-Y Liao ldquoResearch summary on transportation cyber physical systems andthe challenging technologiesrdquo China Journal of Highway andTransport vol 26 no 1 pp 144ndash154 2013
[3] L Li D Wen and D Yao ldquoA survey of traffic control withvehicular communicationsrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 425ndash432 2014
[4] Y FHuC Li J LiH YGuo P Y Sun andHChen ldquoObserver-based output feedback control of electronic throttlesrdquo ActaAutomatica Sinica vol 37 no 6 pp 746ndash754 2011
[5] P Ioannou and Z Xu ldquoThrottle and brake control system forautomatic vehicle followingrdquo Journal of Intelligent Transporta-tion Systems vol 1 no 4 pp 345ndash377 1994
[6] Y Li and D Sun ldquoMicroscopic car-following model for thetraffic flow the state of the artrdquo Journal of Control Theory andApplications vol 10 no 2 pp 133ndash143 2012
[7] T Tang W Shi H Shang and Y Wang ldquoA new car-followingmodel with consideration of inter-vehicle communicationrdquoNonlinear Dynamics vol 76 no 4 pp 2017ndash2023 2014
[8] J Ploeg N Van DeWouw and H Nijmeijer ldquoLp string stabilityof cascaded systems application to vehicle platooningrdquo IEEETransactions on Control Systems Technology vol 22 no 2 pp786ndash793 2014
[9] W Wang S S Liao X Li and J S Ren ldquoThe processof information propagation along a traffic stream throughintervehicle communicationrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 345ndash354 2014
[10] L Xiao and F Gao ldquoPractical string stability of platoon of adap-tive cruise control vehiclesrdquo IEEE Transactions on IntelligentTransportation Systems vol 12 no 4 pp 1184ndash1194 2011
[11] X F Yuan Y N Wang L H Wu X Z Zhang and WSun ldquoNeural network based self-learning control strategy forelectronic throttle valverdquo IEEE Transactions on Vehicular Tech-nology vol 59 no 8 pp 3757ndash3765 2010
[12] J Deur D Pavkovic N Peric M Jansz and D Hrovat ldquoAnelectronic throttle control strategy including compensation offriction and limp-home effectsrdquo IEEE Transactions on IndustryApplications vol 40 no 3 pp 821ndash834 2004
[13] D Pavkovic J DeurM Jansz andN Peric ldquoAdaptive control ofautomotive electronic throttlerdquo Control Engineering Practicevol 14 no 2 pp 121ndash136 2006
[14] X Yuan and Y Wang ldquoA novel electronic-throttle-valve con-troller based on approximate model methodrdquo IEEE Transac-tions on Industrial Electronics vol 56 no 3 pp 883ndash890 2009
[15] M Vasak M Baotic MMorari I Petrovic and N Peric ldquoCon-strained optimal control of an electronic throttlerdquo InternationalJournal of Control vol 79 no 5 pp 465ndash478 2006
[16] M Vasak M Baotic I Petrovic and N Peric ldquoHybrid theory-based time-optimal control of an electronic throttlerdquo IEEETransactions on Industrial Electronics vol 54 no 3 pp 1483ndash1494 2007
[17] D Kim H Peng S Bai and J M Maguire ldquoControl ofintegrated powertrain with electronic throttle and automatictransmissionrdquo IEEE Transactions on Control Systems Technol-ogy vol 15 no 3 pp 474ndash482 2007
[18] K Nakano U Sawut K Higuchi and Y Okajima ldquoModellingand observer-based sliding-mode control of electronic throttlesystemrdquo ECTI Transactions on Electrical Engineering Electron-ics and Communications vol 4 no 1 pp 22ndash28 2006
[19] M Horn and M Reichhartinger ldquoSecond-order sliding modecontrol of electronic throttle valvesrdquo in Proceedings of the IEEE10th International Workshop on Variable Structure Systems (VSSrsquo08) pp 280ndash284 IEEE Antalya Turkey June 2008
[20] Y D Pan U Ozguner and O H Dagci ldquoVariable-structurecontrol of electronic throttle valvesrdquo IEEE Transactions onIndustrial Electronics vol 55 no 11 pp 3899ndash3907 2008
[21] R Bai and S Tong ldquoAdaptive backstepping sliding-mode con-trol of the electronic throttle system in modern automobilesrdquoMathematical Problems in Engineering vol 2014 Article ID383064 8 pages 2014
[22] X Yuan Y Wang and L Wu ldquoSVM-based approximate modelcontrol for electronic throttle valverdquo IEEE Transactions onVehicular Technology vol 57 no 5 pp 2747ndash2756 2008
[23] M Baric I Petrovic and N Peric ldquoNeural network-basedsliding mode control of electronic throttlerdquo Engineering Appli-cations of Artificial Intelligence vol 18 no 8 pp 951ndash961 2005
[24] M Nentwig and P Mercorelli ldquoThrottle valve control using aninverse local linear model tree based on a Fuzzy neural net-workrdquo inProceedings of the 7th IEEE International Conference onCybernetic Intelligent Systems (CIS rsquo08) pp 1ndash6 London UKSeptember 2008
[25] M Baric I Petrovic and N Peric ldquoNeural network based slid-ingmode controller for a class of linear systemswith unmatcheduncertaintiesrdquo in Proceedings of the 41st IEEE Conference onDecision and Control vol 1 pp 967ndash972 Las Vegas Nev USADecember 2002
[26] W Sheng and Y Bao ldquoFruit fly optimization algorithm basedfractional order fuzzy-PID controller for electronic throttlerdquoNonlinear Dynamics vol 73 no 1-2 pp 611ndash619 2013
[27] C-H Wang and D-Y Huang ldquoA new intelligent fuzzy con-troller for nonlinear hysteretic electronic throttle in modernintelligent automobilesrdquo IEEE Transactions on Industrial Elec-tronics vol 60 no 6 pp 2332ndash2345 2013
[28] A K Yadav and P Gaur ldquoRobust adaptive speed control ofuncertain hybrid electric vehicle using electronic throttle con-trol with varying road graderdquo Nonlinear Dynamics vol 76 no1 pp 305ndash321 2014
[29] Z J Kang and X Y Chen ldquoA design method of nonlinearextension state observerrdquo Electric Machines and Control vol 5no 3 pp 199ndash203 2001
[30] A A Godbole J P Kolhe and S E Talole ldquoPerformanceanalysis of generalized extended state observer in tacklingsinusoidal disturbancesrdquo IEEE Transactions on Control SystemsTechnology vol 21 no 6 pp 2212ndash2223 2013
[31] Z Gao X Dai T Breikin and H Wang ldquoNovel parameteridentification by using a high-gain observer with applicationto a gas turbine enginerdquo IEEE Transactions on IndustrialInformatics vol 4 no 4 pp 271ndash279 2008
[32] M Morawiec ldquoThe adaptive backstepping control of perma-nent magnet synchronous motor supplied by current sourceinverterrdquo IEEE Transactions on Industrial Informatics vol 9 no2 pp 1047ndash1055 2013
[33] J R Dominguez A Navarrete M A Meza A G Loukianovand J Canedo ldquoDigital sliding-mode sensorless control forsurface-mounted PMSMrdquo IEEE Transactions on IndustrialInformatics vol 10 no 1 pp 137ndash151 2014
[34] D Zhao T Zou S Li and Q Zhu ldquoAdaptive backsteppingsliding mode control for leader-follower multi-agent systemsrdquoIET Control Theory amp Applications vol 6 no 8 pp 1109ndash11172012
Mathematical Problems in Engineering 11
[35] Y C Fang P C Wang N Sun and Y C Zhang ldquoDynamicsanalysis and nonlinear control of an offshore boom cranerdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 414ndash4272014
[36] Y Xia Z Zhu and M Fu ldquoBack-stepping sliding mode controlfor missile systems based on an extended state observerrdquo IETControl Theory amp Applications vol 5 no 1 pp 93ndash102 2011
[37] N Sun Y C Fang and H Chen ldquoA new antiswing controlmethod for underactuated cranes with unmodeled uncer-tainties theoretical design and hardware experimentsrdquo IEEETransactions on Industrial Electronics vol 62 no 1 pp 453ndash4652015
[38] X Zhang Y Fang andN Sun ldquoMinimum-time trajectory plan-ning for underactuated overhead crane systems with state andcontrol constraintsrdquo IEEETransactions on Industrial Electronicsvol 61 no 12 pp 6915ndash6925 2014
[39] E Hendricks and S C Sorenson ldquoMean value modelling ofspark ignition enginesrdquo SAE Technical Paper 900616 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
ESO
u
+
+
minus
minus
120579dx1z1
+
Back-steppingDuduce
slidingsurface
Adaptive back-steppingsliding mode controller
Adaptive back-steppingsliding mode controller
Lyapunov stabilityanalysis
Adaptive law
x2
x1
Figure 2 Control strategy
Define
P =[[
[
minus11988611 0
minus11988620 1
minus11988630 0
]]
]
E =[[
[
0
0
minus1
]]
]
120575X = (120575119909112057511990921205751199093)T
(18)
Then (17) can be rewritten as
120575X = P120575X + E3 (19)
It is shown from (19) that 119897119894(119894 = 1 2 3) can be determined
by 119886119894(119894 = 1 2 3) Hence we could choose appropriate
parameters 119886119894(119894 = 1 2 3) to guarantee the closed-loop
stability of system (19)Submitting (16) into (12) the ESO can be obtained as
follows_1199091=
_1199092minus
1198861
119892 (_1199091minus 1199091)
119892 (_1199091minus 1199091)
_1199092=
_1199093minus
1198862
119892 (_1199091minus 1199091)
119892 (_1199091minus 1199091) + 119861119906
_1199093= minus
1198863
119892 (_1199091minus 1199091)
119892 (_1199091minus 1199091)
(20)
where the nonlinear function119892(119895) satisfies the following threeconditions [29]
(i) 119892(119895) is continuously differentiable(ii) 119892(0) = 0(iii) d119892(119895)d119895 = 0
4 Adaptive Back-Stepping SMC Design
To overcome the disturbance and ensure the robustness ofcontroller [32ndash34] we design the adaptive back-steppingcontroller with SMC for the ET system Figure 2 illustratesthe control strategy where
_1199092is the estimation of opening
angle change for the ETThe back-stepping technique consists of a step-by-step
construction of a new systemwith state variables 119911119894= 119909119894minus119909119889119894
with 119909119889119894
being the desired value for state 119909119894 Let the desired
ET angle be 120579119889 and we start by constructing the first state
variable 1199111as the tacking error
1199111= 1199091minus 120579119889 (21)
Then we will design the second desired state 1199091198892(119905) such that
the state 1199111satisfies
1= minus11988811199111if 1199092(119905) = 119909
1198892(119905) where 119888
1is a
positive constant Then it follows from (21) and (9) that 1=
1199092minus 120579119889= 1199091198892minus 120579119889= minus11988811199111 Hence we have 119909
1198892= minus11988811199111+ 120579119889
and the second system state variable 1199112is constructed as
1199112= 1199092minus 1199091198892
= 1199092minus 120579119889+ 11988811199111 (22)
The candidate Lyapunov function can be chosen as [35]
1198811=1
21199112
1 (23)
Then we have
1= 11991111= 1199111(1199092minus 120579119889) (24)
Based on the fact that 1199112= 1199092minus 120579119889+ 11988811199111 we know that
1=
1199092minus 120579119889= 1199112minus 11988811199111 thus it is obtained that
1= 11991111= 11991111199112minus 11988811199112
1 (25)
To facilitate subsequent development a sliding surface interms of 119911
1and 1199112is defined as follows
119878 = 11989611199111+ 1199112 (26)
where 1198961gt 0
Remark 1 It is worthwhile to point out that in generalthe sliding mode surface is usually defined as 119878 = 119911
2for
traditional back-stepping based SMC [36] for which it isrequired to guarantee that the system state converges to thesliding mode surface 119878 = 119911
2= 0 in finite time and
then we can derive from (25) that 1199111will be stabilized to
origin However unlike the traditional approach we definethe sliding surface as 119878 = 119896
11199111+ 1199112in (26) other than
119878 = 1199112 and it is shown in the subsequent Theorems 2 and 3
that 1199111(119905) 1199112(119905) and 119878(119905) will asymptotically converge to zero
simultaneously which relaxes the finite-time requirement forthe sliding surface in the traditional design
Mathematical Problems in Engineering 5
Inspired by the Lyapunov-based control design methodsa controller with the capability of disturbance rejection andstrong robustness is designed as follows
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860x minus 119888
11+ 120579119889minus 119865 sgn (119878)
minus 120581 (119878 + 120578 sgn (119878))] (27)
where 120581 gt 0 120578 gt 0
Theorem 2 With the proposed controller in (27) if thefollowing condition is satisfied
|119876| gt 0 (28)
with
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(29)
Then the closed-loop system is Lyapunov stable in the sense that
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(30)
Proof Based on (23) a candidate Lyapunov function can bechosen as [37]
1198812= 1198811+1
21198782
(31)
Then
2= 1+ 119878 119878 = 119911
11199112minus 11988811199112
1+ 119878 (119896
11+ 2)
= 11991111199112minus 11988811199112
1
+ 119878 (1198961(1199112minus 11988811199111) + 119860x + 119861119906 + 119865 minus 120579
119889+ 11988811)
(32)
Based on (32) let
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860x minus 119888
11+ 120579119889minus 119865 sgn (119878)
minus 120581 (119878 + 120578 sgn (119878))] (33)
where 120581 gt 0 120578 gt 0 then
2= 1+ 119878 119878
= 11991111199112minus 11988811199112
1
+ 119878 (1198961(1199112minus 11988811199111) + 119860x + 119861119906 + 119865 minus 120579
119889+ 11988811)
= 11991111199112minus 11988811199112
1minus 1205811198782
minus 120581120578 |119878| + 119865119878 minus 119865 |119878|
le minus 11988811199112
1+ 11991111199112minus 1205811198782
minus 120581120578 |119878|
(34)
Let
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(35)
Hence
119911T119876119911 = [119911
11199112][[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
[
1199111
1199112
]
= 11988811199112
1minus 11991111199112+ 1205811198962
11199112
1+ 2120581119896
111991111199112+ 1205811199112
2
= 11988811199112
1minus 11991111199112+ 1205811198782
(36)
where 119911T = [11991111199112] Consider
|119876| = 120581 (1198881+ 1205811198962
1) minus (120581119896
1minus1
2)
2
= 120581 (1198881+ 1205811198961) minus
1
4 (37)
If 120581 1198881 and 119896
1are designed reasonably to ensure |119876| gt 0 then
119876 is a positive definite matrix Consequently
2le minus119911
T119876119911 minus 120581120578 |119878| le 0 (38)
According to 2le 0 we know that 119881
2is a nonincreasing
function when 119905 isin [0infin) so 1198812(119905) le 119881
2(0) lt infin
Since2= 11199112+ 11991112minus 2119888111991111minus 120581119878 119878 minus 120581120578 119878 sgn (119878)
+ 119865 119878 minus 119865 119878 sgn (119878) (39)
Based on (21) (26) and (32) we know that 1199111(119905) 1199112(119905) and
119878(119905) are bounded when 119905 ge 0 Since 1(119905) = 119911
2minus 11988811199111 we
know that 1(119905) isin L
infin Assuming that 120579
119889 120579119889 120579119889isin Linfin it
is known from 2(119905) =
2minus 120579119889minus 11988811that
2(119905) isin L
infin
Furthermore based on (39) we know that 2is uniformly
continuous because 2isin Linfin
In addition we have
int
infin
0
100381610038161003816100381610038162
10038161003816100381610038161003816d119905 = 10038161003816100381610038161198812 (infin)
1003816100381610038161003816 minus10038161003816100381610038161198812 (0)
1003816100381610038161003816 lt infin (40)
According to (40) we know that 2
isin L2 Hence we
know that lim119905rarrinfin
2= 0 based on Barbalatrsquos Lemma [38]
Moreover we know from 2le minus119911
T119876119911 minus 120581120578|119878| le 0 that
lim119905rarrinfin
2(119905) le lim
119905rarrinfin(minus119911
T119876119911 minus 120581120578|119878|) le 0 thus we
have lim119905rarrinfin
(119911T119876119911 + 120581120578|119878|) = 0 Consequently we have
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin1199112(119905) = 0 lim
119905rarrinfin119878(119905) = 0
Furthermore if the parametric uncertainties in ET areconsidered an adaptive controller is designed as follows
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860xminus
_119865 + 120579119889minus 11988811
minus 120581 (119878 + 120578 sgn (119878))]
=119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091minus
_119865 +
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
1199092
+ 120579119889minus (1198961+ 1198881) 1199092+ 119896111988811199111+ (1198961+ 1198881) 120579119889
minus 120581 (119878 + 120578 sgn (119878))]
(41)
6 Mathematical Problems in Engineering
where_119865 is the estimation of 119865 and the parameter updating
law is designed as
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) + 1199092minus 120579119889] (42)
Theorem 3 With the proposed adaptive controller in (41) andthe parameter estimation law in (42) if |119876| gt 0 with
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(43)
then the closed-loop system is stable in the sense that
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(44)
Proof Firstly we assume that the parametric uncertaintiesand external disturbance change slowly then = 0 Todesign the controller with adaptive capability of parametricuncertainties the candidate Lyapunov function is defined asfollows [37]
1198813= 1198812+
1
21205821198652
(45)
where 119865 = 119865 minus_119865 and
_119865 is the estimation of 119865 120582 gt 0 Then
3= 2minus1
120582119865_119865
= 11991111199112minus 11988811199112
1
+ 119878 [1198961(1199112minus 11988811199111) + 119860x + 119861119906 +
_119865 minus 120579
119889+ 11988811]
minus1
120582119865(
_119865 minus 120582119878)
(46)
Based on (46) we let
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860xminus
_119865 + 120579119889minus 11988811
minus 120581 (119878 + 120578 sgn (119878))]
=119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091minus
_119865 +
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
1199092
+ 120579119889minus (1198961+ 1198881) 1199092+ 119896111988811199111+ (1198961+ 1198881) 120579119889
minus 120581 (119878 + 120578 sgn (119878))]
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) + 1199092minus 120579119889]
(47)
Hence substituting (47) into (46) we have
3= 2minus1
120582119865_119865 = 119911
11199112minus 11988811199112
1minus 1205811198782
minus 120581120578 |119878| (48)
0 t
Clock To workspace
State
To workspace
Input Signal
Throttle Controller
Throttle Observer
Throttle Plant
Equation (51)
Equation (20)
Equation (8)
Figure 3 Simulink main program
According to (36) we can rewrite (48) as
3le minus119911
TQ119911 minus 120581120578 |119878| (49)
If 119876 is a positive definite matrix then 3le 0 Hence the
proposed adaptive controller is Lyapunov stableSimilar to the proof of Theorem 2 then we can use
Barbalatrsquos Lemma to obtain that [38]
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(50)
Based on the above discussion if the immeasurablevariable 119909
2in (47) is replaced with the estimation value
_1199092 we can obtain the back-stepping SMC incorporating the
proposed ESO as follows
119906 =119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091+
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
_1199092minus
_119865
+ 120579119889minus (1198961+ 1198881)_1199092+ (1198961+ 1198881) 120579119889+ 119896111988811199111
minus 120581 (119878 + 120578 sgn (119878))]
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) +
_1199092minus 120579119889]
(51)
5 Numerical Experiments
51 Simulations In order to verify the effectiveness of theproposed controller the simulation of ETC is conductedunder the MatlabSimulink platform based on the dynamiccharacteristics of ET valve In addition we choose 119892(119895) =
(1minus119890minus119895
)(1+119890minus119895
)Thewhole Simulinkmain program is shownin Figure 3 and the basic parameter configuration of ET islisted in Table 1
According to the requirement of ETC in engineeringapplications given in [12] the reference inputs are chosen asthe step and sine signals respectively Figure 4 depicts thesignal tracking results using the step reference signal whenthe desired throttle opening is 60∘ Figure 4 shows that theposition of ET is able to track the reference signal withoutovershoot within 100ms while the tracking results with
Mathematical Problems in Engineering 7
Table 1 Basic parameter comfiguration of ET
Parameters Value Units1205790
2 deg119896119897
1695 mdash119896119905
0016 NsdotmA119896pre 0107 Nsdotm119877119886
28 Ω
119869 4 times 10minus6 kgsdotm2
119896119905119891
00048 Nsdotm119896ch 24 mdash119896V 0016 Vsdotsrad119896119891
4 times 10minus4 Nsdotmsdotsrad119896sp 00247 Nsdotmrad
0 02 04 06 08 10
10
20
30
40
50
60
70
Time (s)
Desired inputActual output
001 002 003 004 005505254565860
Thro
ttle a
ngle
(deg
)
Figure 4 Step tracking response
the sine reference signal are shown in Figure 5 FromFigures 4and 5 the results show that the proposed controller can satisfythe ET tracking control requirement in [12] with the step andsine reference signals
As foregoing discussion those parameters (119896119905 119896119905119891 119896sp) are
designed using Lyapunov techniques Figure 6 is the stepresponse of ETC with parametric uncertainties when desiredthrottle opening is 60∘ and the parameters Δ119896
119905= plusmn00048
Δ119896119905119891
= plusmn00014 Δ119896sp = plusmn00074 Figure 6 shows that thesettling time of ETC is less than 100ms Figure 6 also showsthat the steady-state error of ETC tends to zero Figure 7 isthe adaptive estimation value of the total uncertainty 119865 Inaddition the results form Figure 6 show that the proposedcontroller has a better robustness compared with Figure 4
The discussion mentioned above demonstrates that theproposed controller has strong robustness with respect toparametric uncertaintiesThat is to say a stable vehicle speedcan be guaranteed since the adaptive controller can quicklyadjust the opening angle of ET valve when an externaldisturbance occurs
0 005 01202530354045
0 02 04 06 08 1
0
10
20
30
40
50
60
70
Time (s)
Desired inputActual output
minus10
Thro
ttle a
ngle
(deg
)
Figure 5 Sine tracking response
0
20
40
60
80
0 002 004 006565860
0 002 004 006
0 02 04 06 08 1Time (s)
0 02 04 06 08 1Time (s)
Desired inputActual output
minus60
minus40
minus20
0
20
minus6minus4minus20
Trac
king
erro
rs (d
eg)
Thro
ttle a
ngle
(deg
)
Figure 6 Step tracking response of parameters changes
In practical application the mutation of throttle openingis inevitable which has important influence on vehicle accel-erationdeceleration Furthermore traffic congestion willlead to the stop-and-go phenomenon in traffic flow furtherresulting in the vehicle speed change Hence ET should havegood responsiveness capability to track the change
Therefore it is significant to conduct analysis on the con-troller performance under the condition of input signalmuta-tion Moreover the nonlinear spring does not allow openingangles below 5∘ and above 80∘ [20] the experiment under theminimum and maximum values of square reference signalis set as 10∘ and 60∘ respectively as shown in Figure 8Figure 8 shows that the proposed controller can track thesmall values accurately (the important condition of idle speedcontrol) so does the large values (the essential condition of
8 Mathematical Problems in Engineering
Table 2 Controller performance comparison
Control methods Setting time Steady-state errors under parameter change OvershootBack-stepping control in [4] lt140ms lt2∘ a littleController of this present paper lt100ms lt01∘ little
F ad
aptiv
e val
ue
0 02 04 06 08 1Time (s)
minus1400
minus1200
minus1000
minus800
minus600
minus400
minus200
0
Figure 7 Estimation of 119865
0
20
40
60
80
0 02 04 06 08 1Time (s)
Desired inputActual output
Trac
king
erro
rs (d
eg)
0 02 04 06 08 1Time (s)
minus100
minus50
0
50
100
Thro
ttle a
ngle
(deg
)
Figure 8 Square wave tracking response
vehicle acceleration) In addition the settling time is less thanrequired 100ms On the other hand Figure 8 also showsthat the steady-state errors approximate 0 which illustratesthat the proposed controller can satisfy the requirement ofETC Hence the results from this simulation show that thedesigned controller also has a good control performanceunder square wave input signal It also implies that the vehiclein the platoon can follow the preceding vehicles with safe
space headway and safe speed via ETC when the stop-and-go phenomenon emerges
52 Performance Comparison Compared with the literature[4] this study considers not only the external disturbancebut also the parametric uncertainties and the torque causedby the air flow Then the adaptive law is designed using theLyapunov techniques Finally the experiment is conductedusing simulation and the comparison results are summarizedin Table 2 Table 2 shows that the proposed adaptive back-stepping SMC has better control performance than the back-stepping controller in [4] in terms of the settling time steady-state error and the overshoot
53 Simulated Experiment In this section we incorporatethe ET controller withmean valuemodeling of spark ignitionengine under the conditions of pressing the accelerator pedaland easing it off [39] The schematic block diagram of mainsimulation is shown in Figure 9 Figure 10 shows the throttleopening angle tracking performance It can be seen thatthe proposed controller can track the desired input signaleffectively Figures 11 12 and 13 show the manifold pressureengine speed and throttle airflow respectively The resultsshow that the proposed controller can control the engineaccurately via ETC
6 Conclusions
To improve the accuracy of the information for ETC underV2V communications an ESO based adaptive back-steppingSMC is proposed based on the Lyapunov theory in thepresence of high nonlinearity of ET and immeasurable signalsfor throttle opening angle change In addition with thedesigned adaptive law strong robustness to parametric uncer-tainties and external disturbance can be achieved Simulationresults show that the proposed controller can track thedesired reference input signal fast and accurately with strongrobustness to uncertainties and disturbances
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thiswork is jointly supported by theNationalNatural ScienceFoundation of China (Grant no 61304197) the Scientific and
Mathematical Problems in Engineering 9
Desiredinput
Mean valueModelling of spark
Ignition engines
Actual output
Manifold pressureEngine speedThrottle airflow
+
minus
Throttle Controller Throttle Model
Equation (51) Equation (8)
Figure 9 Schematic block diagram of main simulation
0 2 4 6 8 10Time (s)
0
10
20
30
40
50
60
70
Thro
ttle a
ngle
(deg
)
Desired inputActual output
Figure 10 Throttle opening angle
0 2 4 6 8 104
5
6
7
8
9
10
Man
ifold
pre
ssur
e (pa
)
Time (s)
times104
Figure 11 Manifold pressure
Technological Talents of Chongqing (Grant no cstc2014kjrc-qnrc30002) the Key Project of Application andDevelopmentof Chongqing (Grant no cstc2014yykfB40001) the NatureScience Funds of Education Committee of Chongqing (Grantno KJ130506) Natural Science Funds of Chongqing (Grantnos cstc2014jcyjA60003 and cstc2012jjA40035) and Natural
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Engi
ne sp
eed
(rpm
)
0 2 4 6 8 10Time (s)
Figure 12 Engine speed
Thro
ttle a
irflow
(gs
)
0 2 4 6 8 10Time (s)
minus15
minus10
minus5
0
5
10
15
20
25
Figure 13 Throttle airflow
Science Funds of CQUPT (Grant nos A2012-78 and A2013-27) The authors would like to express their gratitude toDr Hongchun Qu and Dr Xiaoming Tang from ChongqingUniversity of Posts and Telecommunications for their gooddiscussions on the paper preparation
References
[1] V Milanes S E Shladover J Spring C Nowakowski HKawazoe and M Nakamura ldquoCooperative adaptive cruise
10 Mathematical Problems in Engineering
control in real traffic situationsrdquo IEEETransactions on IntelligentTransportation Systems vol 15 no 1 pp 296ndash305 2014
[2] D-H Sun Y-F Li W-N Liu M Zhao and X-Y Liao ldquoResearch summary on transportation cyber physical systems andthe challenging technologiesrdquo China Journal of Highway andTransport vol 26 no 1 pp 144ndash154 2013
[3] L Li D Wen and D Yao ldquoA survey of traffic control withvehicular communicationsrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 425ndash432 2014
[4] Y FHuC Li J LiH YGuo P Y Sun andHChen ldquoObserver-based output feedback control of electronic throttlesrdquo ActaAutomatica Sinica vol 37 no 6 pp 746ndash754 2011
[5] P Ioannou and Z Xu ldquoThrottle and brake control system forautomatic vehicle followingrdquo Journal of Intelligent Transporta-tion Systems vol 1 no 4 pp 345ndash377 1994
[6] Y Li and D Sun ldquoMicroscopic car-following model for thetraffic flow the state of the artrdquo Journal of Control Theory andApplications vol 10 no 2 pp 133ndash143 2012
[7] T Tang W Shi H Shang and Y Wang ldquoA new car-followingmodel with consideration of inter-vehicle communicationrdquoNonlinear Dynamics vol 76 no 4 pp 2017ndash2023 2014
[8] J Ploeg N Van DeWouw and H Nijmeijer ldquoLp string stabilityof cascaded systems application to vehicle platooningrdquo IEEETransactions on Control Systems Technology vol 22 no 2 pp786ndash793 2014
[9] W Wang S S Liao X Li and J S Ren ldquoThe processof information propagation along a traffic stream throughintervehicle communicationrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 345ndash354 2014
[10] L Xiao and F Gao ldquoPractical string stability of platoon of adap-tive cruise control vehiclesrdquo IEEE Transactions on IntelligentTransportation Systems vol 12 no 4 pp 1184ndash1194 2011
[11] X F Yuan Y N Wang L H Wu X Z Zhang and WSun ldquoNeural network based self-learning control strategy forelectronic throttle valverdquo IEEE Transactions on Vehicular Tech-nology vol 59 no 8 pp 3757ndash3765 2010
[12] J Deur D Pavkovic N Peric M Jansz and D Hrovat ldquoAnelectronic throttle control strategy including compensation offriction and limp-home effectsrdquo IEEE Transactions on IndustryApplications vol 40 no 3 pp 821ndash834 2004
[13] D Pavkovic J DeurM Jansz andN Peric ldquoAdaptive control ofautomotive electronic throttlerdquo Control Engineering Practicevol 14 no 2 pp 121ndash136 2006
[14] X Yuan and Y Wang ldquoA novel electronic-throttle-valve con-troller based on approximate model methodrdquo IEEE Transac-tions on Industrial Electronics vol 56 no 3 pp 883ndash890 2009
[15] M Vasak M Baotic MMorari I Petrovic and N Peric ldquoCon-strained optimal control of an electronic throttlerdquo InternationalJournal of Control vol 79 no 5 pp 465ndash478 2006
[16] M Vasak M Baotic I Petrovic and N Peric ldquoHybrid theory-based time-optimal control of an electronic throttlerdquo IEEETransactions on Industrial Electronics vol 54 no 3 pp 1483ndash1494 2007
[17] D Kim H Peng S Bai and J M Maguire ldquoControl ofintegrated powertrain with electronic throttle and automatictransmissionrdquo IEEE Transactions on Control Systems Technol-ogy vol 15 no 3 pp 474ndash482 2007
[18] K Nakano U Sawut K Higuchi and Y Okajima ldquoModellingand observer-based sliding-mode control of electronic throttlesystemrdquo ECTI Transactions on Electrical Engineering Electron-ics and Communications vol 4 no 1 pp 22ndash28 2006
[19] M Horn and M Reichhartinger ldquoSecond-order sliding modecontrol of electronic throttle valvesrdquo in Proceedings of the IEEE10th International Workshop on Variable Structure Systems (VSSrsquo08) pp 280ndash284 IEEE Antalya Turkey June 2008
[20] Y D Pan U Ozguner and O H Dagci ldquoVariable-structurecontrol of electronic throttle valvesrdquo IEEE Transactions onIndustrial Electronics vol 55 no 11 pp 3899ndash3907 2008
[21] R Bai and S Tong ldquoAdaptive backstepping sliding-mode con-trol of the electronic throttle system in modern automobilesrdquoMathematical Problems in Engineering vol 2014 Article ID383064 8 pages 2014
[22] X Yuan Y Wang and L Wu ldquoSVM-based approximate modelcontrol for electronic throttle valverdquo IEEE Transactions onVehicular Technology vol 57 no 5 pp 2747ndash2756 2008
[23] M Baric I Petrovic and N Peric ldquoNeural network-basedsliding mode control of electronic throttlerdquo Engineering Appli-cations of Artificial Intelligence vol 18 no 8 pp 951ndash961 2005
[24] M Nentwig and P Mercorelli ldquoThrottle valve control using aninverse local linear model tree based on a Fuzzy neural net-workrdquo inProceedings of the 7th IEEE International Conference onCybernetic Intelligent Systems (CIS rsquo08) pp 1ndash6 London UKSeptember 2008
[25] M Baric I Petrovic and N Peric ldquoNeural network based slid-ingmode controller for a class of linear systemswith unmatcheduncertaintiesrdquo in Proceedings of the 41st IEEE Conference onDecision and Control vol 1 pp 967ndash972 Las Vegas Nev USADecember 2002
[26] W Sheng and Y Bao ldquoFruit fly optimization algorithm basedfractional order fuzzy-PID controller for electronic throttlerdquoNonlinear Dynamics vol 73 no 1-2 pp 611ndash619 2013
[27] C-H Wang and D-Y Huang ldquoA new intelligent fuzzy con-troller for nonlinear hysteretic electronic throttle in modernintelligent automobilesrdquo IEEE Transactions on Industrial Elec-tronics vol 60 no 6 pp 2332ndash2345 2013
[28] A K Yadav and P Gaur ldquoRobust adaptive speed control ofuncertain hybrid electric vehicle using electronic throttle con-trol with varying road graderdquo Nonlinear Dynamics vol 76 no1 pp 305ndash321 2014
[29] Z J Kang and X Y Chen ldquoA design method of nonlinearextension state observerrdquo Electric Machines and Control vol 5no 3 pp 199ndash203 2001
[30] A A Godbole J P Kolhe and S E Talole ldquoPerformanceanalysis of generalized extended state observer in tacklingsinusoidal disturbancesrdquo IEEE Transactions on Control SystemsTechnology vol 21 no 6 pp 2212ndash2223 2013
[31] Z Gao X Dai T Breikin and H Wang ldquoNovel parameteridentification by using a high-gain observer with applicationto a gas turbine enginerdquo IEEE Transactions on IndustrialInformatics vol 4 no 4 pp 271ndash279 2008
[32] M Morawiec ldquoThe adaptive backstepping control of perma-nent magnet synchronous motor supplied by current sourceinverterrdquo IEEE Transactions on Industrial Informatics vol 9 no2 pp 1047ndash1055 2013
[33] J R Dominguez A Navarrete M A Meza A G Loukianovand J Canedo ldquoDigital sliding-mode sensorless control forsurface-mounted PMSMrdquo IEEE Transactions on IndustrialInformatics vol 10 no 1 pp 137ndash151 2014
[34] D Zhao T Zou S Li and Q Zhu ldquoAdaptive backsteppingsliding mode control for leader-follower multi-agent systemsrdquoIET Control Theory amp Applications vol 6 no 8 pp 1109ndash11172012
Mathematical Problems in Engineering 11
[35] Y C Fang P C Wang N Sun and Y C Zhang ldquoDynamicsanalysis and nonlinear control of an offshore boom cranerdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 414ndash4272014
[36] Y Xia Z Zhu and M Fu ldquoBack-stepping sliding mode controlfor missile systems based on an extended state observerrdquo IETControl Theory amp Applications vol 5 no 1 pp 93ndash102 2011
[37] N Sun Y C Fang and H Chen ldquoA new antiswing controlmethod for underactuated cranes with unmodeled uncer-tainties theoretical design and hardware experimentsrdquo IEEETransactions on Industrial Electronics vol 62 no 1 pp 453ndash4652015
[38] X Zhang Y Fang andN Sun ldquoMinimum-time trajectory plan-ning for underactuated overhead crane systems with state andcontrol constraintsrdquo IEEETransactions on Industrial Electronicsvol 61 no 12 pp 6915ndash6925 2014
[39] E Hendricks and S C Sorenson ldquoMean value modelling ofspark ignition enginesrdquo SAE Technical Paper 900616 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Inspired by the Lyapunov-based control design methodsa controller with the capability of disturbance rejection andstrong robustness is designed as follows
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860x minus 119888
11+ 120579119889minus 119865 sgn (119878)
minus 120581 (119878 + 120578 sgn (119878))] (27)
where 120581 gt 0 120578 gt 0
Theorem 2 With the proposed controller in (27) if thefollowing condition is satisfied
|119876| gt 0 (28)
with
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(29)
Then the closed-loop system is Lyapunov stable in the sense that
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(30)
Proof Based on (23) a candidate Lyapunov function can bechosen as [37]
1198812= 1198811+1
21198782
(31)
Then
2= 1+ 119878 119878 = 119911
11199112minus 11988811199112
1+ 119878 (119896
11+ 2)
= 11991111199112minus 11988811199112
1
+ 119878 (1198961(1199112minus 11988811199111) + 119860x + 119861119906 + 119865 minus 120579
119889+ 11988811)
(32)
Based on (32) let
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860x minus 119888
11+ 120579119889minus 119865 sgn (119878)
minus 120581 (119878 + 120578 sgn (119878))] (33)
where 120581 gt 0 120578 gt 0 then
2= 1+ 119878 119878
= 11991111199112minus 11988811199112
1
+ 119878 (1198961(1199112minus 11988811199111) + 119860x + 119861119906 + 119865 minus 120579
119889+ 11988811)
= 11991111199112minus 11988811199112
1minus 1205811198782
minus 120581120578 |119878| + 119865119878 minus 119865 |119878|
le minus 11988811199112
1+ 11991111199112minus 1205811198782
minus 120581120578 |119878|
(34)
Let
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(35)
Hence
119911T119876119911 = [119911
11199112][[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
[
1199111
1199112
]
= 11988811199112
1minus 11991111199112+ 1205811198962
11199112
1+ 2120581119896
111991111199112+ 1205811199112
2
= 11988811199112
1minus 11991111199112+ 1205811198782
(36)
where 119911T = [11991111199112] Consider
|119876| = 120581 (1198881+ 1205811198962
1) minus (120581119896
1minus1
2)
2
= 120581 (1198881+ 1205811198961) minus
1
4 (37)
If 120581 1198881 and 119896
1are designed reasonably to ensure |119876| gt 0 then
119876 is a positive definite matrix Consequently
2le minus119911
T119876119911 minus 120581120578 |119878| le 0 (38)
According to 2le 0 we know that 119881
2is a nonincreasing
function when 119905 isin [0infin) so 1198812(119905) le 119881
2(0) lt infin
Since2= 11199112+ 11991112minus 2119888111991111minus 120581119878 119878 minus 120581120578 119878 sgn (119878)
+ 119865 119878 minus 119865 119878 sgn (119878) (39)
Based on (21) (26) and (32) we know that 1199111(119905) 1199112(119905) and
119878(119905) are bounded when 119905 ge 0 Since 1(119905) = 119911
2minus 11988811199111 we
know that 1(119905) isin L
infin Assuming that 120579
119889 120579119889 120579119889isin Linfin it
is known from 2(119905) =
2minus 120579119889minus 11988811that
2(119905) isin L
infin
Furthermore based on (39) we know that 2is uniformly
continuous because 2isin Linfin
In addition we have
int
infin
0
100381610038161003816100381610038162
10038161003816100381610038161003816d119905 = 10038161003816100381610038161198812 (infin)
1003816100381610038161003816 minus10038161003816100381610038161198812 (0)
1003816100381610038161003816 lt infin (40)
According to (40) we know that 2
isin L2 Hence we
know that lim119905rarrinfin
2= 0 based on Barbalatrsquos Lemma [38]
Moreover we know from 2le minus119911
T119876119911 minus 120581120578|119878| le 0 that
lim119905rarrinfin
2(119905) le lim
119905rarrinfin(minus119911
T119876119911 minus 120581120578|119878|) le 0 thus we
have lim119905rarrinfin
(119911T119876119911 + 120581120578|119878|) = 0 Consequently we have
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin1199112(119905) = 0 lim
119905rarrinfin119878(119905) = 0
Furthermore if the parametric uncertainties in ET areconsidered an adaptive controller is designed as follows
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860xminus
_119865 + 120579119889minus 11988811
minus 120581 (119878 + 120578 sgn (119878))]
=119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091minus
_119865 +
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
1199092
+ 120579119889minus (1198961+ 1198881) 1199092+ 119896111988811199111+ (1198961+ 1198881) 120579119889
minus 120581 (119878 + 120578 sgn (119878))]
(41)
6 Mathematical Problems in Engineering
where_119865 is the estimation of 119865 and the parameter updating
law is designed as
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) + 1199092minus 120579119889] (42)
Theorem 3 With the proposed adaptive controller in (41) andthe parameter estimation law in (42) if |119876| gt 0 with
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(43)
then the closed-loop system is stable in the sense that
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(44)
Proof Firstly we assume that the parametric uncertaintiesand external disturbance change slowly then = 0 Todesign the controller with adaptive capability of parametricuncertainties the candidate Lyapunov function is defined asfollows [37]
1198813= 1198812+
1
21205821198652
(45)
where 119865 = 119865 minus_119865 and
_119865 is the estimation of 119865 120582 gt 0 Then
3= 2minus1
120582119865_119865
= 11991111199112minus 11988811199112
1
+ 119878 [1198961(1199112minus 11988811199111) + 119860x + 119861119906 +
_119865 minus 120579
119889+ 11988811]
minus1
120582119865(
_119865 minus 120582119878)
(46)
Based on (46) we let
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860xminus
_119865 + 120579119889minus 11988811
minus 120581 (119878 + 120578 sgn (119878))]
=119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091minus
_119865 +
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
1199092
+ 120579119889minus (1198961+ 1198881) 1199092+ 119896111988811199111+ (1198961+ 1198881) 120579119889
minus 120581 (119878 + 120578 sgn (119878))]
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) + 1199092minus 120579119889]
(47)
Hence substituting (47) into (46) we have
3= 2minus1
120582119865_119865 = 119911
11199112minus 11988811199112
1minus 1205811198782
minus 120581120578 |119878| (48)
0 t
Clock To workspace
State
To workspace
Input Signal
Throttle Controller
Throttle Observer
Throttle Plant
Equation (51)
Equation (20)
Equation (8)
Figure 3 Simulink main program
According to (36) we can rewrite (48) as
3le minus119911
TQ119911 minus 120581120578 |119878| (49)
If 119876 is a positive definite matrix then 3le 0 Hence the
proposed adaptive controller is Lyapunov stableSimilar to the proof of Theorem 2 then we can use
Barbalatrsquos Lemma to obtain that [38]
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(50)
Based on the above discussion if the immeasurablevariable 119909
2in (47) is replaced with the estimation value
_1199092 we can obtain the back-stepping SMC incorporating the
proposed ESO as follows
119906 =119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091+
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
_1199092minus
_119865
+ 120579119889minus (1198961+ 1198881)_1199092+ (1198961+ 1198881) 120579119889+ 119896111988811199111
minus 120581 (119878 + 120578 sgn (119878))]
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) +
_1199092minus 120579119889]
(51)
5 Numerical Experiments
51 Simulations In order to verify the effectiveness of theproposed controller the simulation of ETC is conductedunder the MatlabSimulink platform based on the dynamiccharacteristics of ET valve In addition we choose 119892(119895) =
(1minus119890minus119895
)(1+119890minus119895
)Thewhole Simulinkmain program is shownin Figure 3 and the basic parameter configuration of ET islisted in Table 1
According to the requirement of ETC in engineeringapplications given in [12] the reference inputs are chosen asthe step and sine signals respectively Figure 4 depicts thesignal tracking results using the step reference signal whenthe desired throttle opening is 60∘ Figure 4 shows that theposition of ET is able to track the reference signal withoutovershoot within 100ms while the tracking results with
Mathematical Problems in Engineering 7
Table 1 Basic parameter comfiguration of ET
Parameters Value Units1205790
2 deg119896119897
1695 mdash119896119905
0016 NsdotmA119896pre 0107 Nsdotm119877119886
28 Ω
119869 4 times 10minus6 kgsdotm2
119896119905119891
00048 Nsdotm119896ch 24 mdash119896V 0016 Vsdotsrad119896119891
4 times 10minus4 Nsdotmsdotsrad119896sp 00247 Nsdotmrad
0 02 04 06 08 10
10
20
30
40
50
60
70
Time (s)
Desired inputActual output
001 002 003 004 005505254565860
Thro
ttle a
ngle
(deg
)
Figure 4 Step tracking response
the sine reference signal are shown in Figure 5 FromFigures 4and 5 the results show that the proposed controller can satisfythe ET tracking control requirement in [12] with the step andsine reference signals
As foregoing discussion those parameters (119896119905 119896119905119891 119896sp) are
designed using Lyapunov techniques Figure 6 is the stepresponse of ETC with parametric uncertainties when desiredthrottle opening is 60∘ and the parameters Δ119896
119905= plusmn00048
Δ119896119905119891
= plusmn00014 Δ119896sp = plusmn00074 Figure 6 shows that thesettling time of ETC is less than 100ms Figure 6 also showsthat the steady-state error of ETC tends to zero Figure 7 isthe adaptive estimation value of the total uncertainty 119865 Inaddition the results form Figure 6 show that the proposedcontroller has a better robustness compared with Figure 4
The discussion mentioned above demonstrates that theproposed controller has strong robustness with respect toparametric uncertaintiesThat is to say a stable vehicle speedcan be guaranteed since the adaptive controller can quicklyadjust the opening angle of ET valve when an externaldisturbance occurs
0 005 01202530354045
0 02 04 06 08 1
0
10
20
30
40
50
60
70
Time (s)
Desired inputActual output
minus10
Thro
ttle a
ngle
(deg
)
Figure 5 Sine tracking response
0
20
40
60
80
0 002 004 006565860
0 002 004 006
0 02 04 06 08 1Time (s)
0 02 04 06 08 1Time (s)
Desired inputActual output
minus60
minus40
minus20
0
20
minus6minus4minus20
Trac
king
erro
rs (d
eg)
Thro
ttle a
ngle
(deg
)
Figure 6 Step tracking response of parameters changes
In practical application the mutation of throttle openingis inevitable which has important influence on vehicle accel-erationdeceleration Furthermore traffic congestion willlead to the stop-and-go phenomenon in traffic flow furtherresulting in the vehicle speed change Hence ET should havegood responsiveness capability to track the change
Therefore it is significant to conduct analysis on the con-troller performance under the condition of input signalmuta-tion Moreover the nonlinear spring does not allow openingangles below 5∘ and above 80∘ [20] the experiment under theminimum and maximum values of square reference signalis set as 10∘ and 60∘ respectively as shown in Figure 8Figure 8 shows that the proposed controller can track thesmall values accurately (the important condition of idle speedcontrol) so does the large values (the essential condition of
8 Mathematical Problems in Engineering
Table 2 Controller performance comparison
Control methods Setting time Steady-state errors under parameter change OvershootBack-stepping control in [4] lt140ms lt2∘ a littleController of this present paper lt100ms lt01∘ little
F ad
aptiv
e val
ue
0 02 04 06 08 1Time (s)
minus1400
minus1200
minus1000
minus800
minus600
minus400
minus200
0
Figure 7 Estimation of 119865
0
20
40
60
80
0 02 04 06 08 1Time (s)
Desired inputActual output
Trac
king
erro
rs (d
eg)
0 02 04 06 08 1Time (s)
minus100
minus50
0
50
100
Thro
ttle a
ngle
(deg
)
Figure 8 Square wave tracking response
vehicle acceleration) In addition the settling time is less thanrequired 100ms On the other hand Figure 8 also showsthat the steady-state errors approximate 0 which illustratesthat the proposed controller can satisfy the requirement ofETC Hence the results from this simulation show that thedesigned controller also has a good control performanceunder square wave input signal It also implies that the vehiclein the platoon can follow the preceding vehicles with safe
space headway and safe speed via ETC when the stop-and-go phenomenon emerges
52 Performance Comparison Compared with the literature[4] this study considers not only the external disturbancebut also the parametric uncertainties and the torque causedby the air flow Then the adaptive law is designed using theLyapunov techniques Finally the experiment is conductedusing simulation and the comparison results are summarizedin Table 2 Table 2 shows that the proposed adaptive back-stepping SMC has better control performance than the back-stepping controller in [4] in terms of the settling time steady-state error and the overshoot
53 Simulated Experiment In this section we incorporatethe ET controller withmean valuemodeling of spark ignitionengine under the conditions of pressing the accelerator pedaland easing it off [39] The schematic block diagram of mainsimulation is shown in Figure 9 Figure 10 shows the throttleopening angle tracking performance It can be seen thatthe proposed controller can track the desired input signaleffectively Figures 11 12 and 13 show the manifold pressureengine speed and throttle airflow respectively The resultsshow that the proposed controller can control the engineaccurately via ETC
6 Conclusions
To improve the accuracy of the information for ETC underV2V communications an ESO based adaptive back-steppingSMC is proposed based on the Lyapunov theory in thepresence of high nonlinearity of ET and immeasurable signalsfor throttle opening angle change In addition with thedesigned adaptive law strong robustness to parametric uncer-tainties and external disturbance can be achieved Simulationresults show that the proposed controller can track thedesired reference input signal fast and accurately with strongrobustness to uncertainties and disturbances
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thiswork is jointly supported by theNationalNatural ScienceFoundation of China (Grant no 61304197) the Scientific and
Mathematical Problems in Engineering 9
Desiredinput
Mean valueModelling of spark
Ignition engines
Actual output
Manifold pressureEngine speedThrottle airflow
+
minus
Throttle Controller Throttle Model
Equation (51) Equation (8)
Figure 9 Schematic block diagram of main simulation
0 2 4 6 8 10Time (s)
0
10
20
30
40
50
60
70
Thro
ttle a
ngle
(deg
)
Desired inputActual output
Figure 10 Throttle opening angle
0 2 4 6 8 104
5
6
7
8
9
10
Man
ifold
pre
ssur
e (pa
)
Time (s)
times104
Figure 11 Manifold pressure
Technological Talents of Chongqing (Grant no cstc2014kjrc-qnrc30002) the Key Project of Application andDevelopmentof Chongqing (Grant no cstc2014yykfB40001) the NatureScience Funds of Education Committee of Chongqing (Grantno KJ130506) Natural Science Funds of Chongqing (Grantnos cstc2014jcyjA60003 and cstc2012jjA40035) and Natural
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Engi
ne sp
eed
(rpm
)
0 2 4 6 8 10Time (s)
Figure 12 Engine speed
Thro
ttle a
irflow
(gs
)
0 2 4 6 8 10Time (s)
minus15
minus10
minus5
0
5
10
15
20
25
Figure 13 Throttle airflow
Science Funds of CQUPT (Grant nos A2012-78 and A2013-27) The authors would like to express their gratitude toDr Hongchun Qu and Dr Xiaoming Tang from ChongqingUniversity of Posts and Telecommunications for their gooddiscussions on the paper preparation
References
[1] V Milanes S E Shladover J Spring C Nowakowski HKawazoe and M Nakamura ldquoCooperative adaptive cruise
10 Mathematical Problems in Engineering
control in real traffic situationsrdquo IEEETransactions on IntelligentTransportation Systems vol 15 no 1 pp 296ndash305 2014
[2] D-H Sun Y-F Li W-N Liu M Zhao and X-Y Liao ldquoResearch summary on transportation cyber physical systems andthe challenging technologiesrdquo China Journal of Highway andTransport vol 26 no 1 pp 144ndash154 2013
[3] L Li D Wen and D Yao ldquoA survey of traffic control withvehicular communicationsrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 425ndash432 2014
[4] Y FHuC Li J LiH YGuo P Y Sun andHChen ldquoObserver-based output feedback control of electronic throttlesrdquo ActaAutomatica Sinica vol 37 no 6 pp 746ndash754 2011
[5] P Ioannou and Z Xu ldquoThrottle and brake control system forautomatic vehicle followingrdquo Journal of Intelligent Transporta-tion Systems vol 1 no 4 pp 345ndash377 1994
[6] Y Li and D Sun ldquoMicroscopic car-following model for thetraffic flow the state of the artrdquo Journal of Control Theory andApplications vol 10 no 2 pp 133ndash143 2012
[7] T Tang W Shi H Shang and Y Wang ldquoA new car-followingmodel with consideration of inter-vehicle communicationrdquoNonlinear Dynamics vol 76 no 4 pp 2017ndash2023 2014
[8] J Ploeg N Van DeWouw and H Nijmeijer ldquoLp string stabilityof cascaded systems application to vehicle platooningrdquo IEEETransactions on Control Systems Technology vol 22 no 2 pp786ndash793 2014
[9] W Wang S S Liao X Li and J S Ren ldquoThe processof information propagation along a traffic stream throughintervehicle communicationrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 345ndash354 2014
[10] L Xiao and F Gao ldquoPractical string stability of platoon of adap-tive cruise control vehiclesrdquo IEEE Transactions on IntelligentTransportation Systems vol 12 no 4 pp 1184ndash1194 2011
[11] X F Yuan Y N Wang L H Wu X Z Zhang and WSun ldquoNeural network based self-learning control strategy forelectronic throttle valverdquo IEEE Transactions on Vehicular Tech-nology vol 59 no 8 pp 3757ndash3765 2010
[12] J Deur D Pavkovic N Peric M Jansz and D Hrovat ldquoAnelectronic throttle control strategy including compensation offriction and limp-home effectsrdquo IEEE Transactions on IndustryApplications vol 40 no 3 pp 821ndash834 2004
[13] D Pavkovic J DeurM Jansz andN Peric ldquoAdaptive control ofautomotive electronic throttlerdquo Control Engineering Practicevol 14 no 2 pp 121ndash136 2006
[14] X Yuan and Y Wang ldquoA novel electronic-throttle-valve con-troller based on approximate model methodrdquo IEEE Transac-tions on Industrial Electronics vol 56 no 3 pp 883ndash890 2009
[15] M Vasak M Baotic MMorari I Petrovic and N Peric ldquoCon-strained optimal control of an electronic throttlerdquo InternationalJournal of Control vol 79 no 5 pp 465ndash478 2006
[16] M Vasak M Baotic I Petrovic and N Peric ldquoHybrid theory-based time-optimal control of an electronic throttlerdquo IEEETransactions on Industrial Electronics vol 54 no 3 pp 1483ndash1494 2007
[17] D Kim H Peng S Bai and J M Maguire ldquoControl ofintegrated powertrain with electronic throttle and automatictransmissionrdquo IEEE Transactions on Control Systems Technol-ogy vol 15 no 3 pp 474ndash482 2007
[18] K Nakano U Sawut K Higuchi and Y Okajima ldquoModellingand observer-based sliding-mode control of electronic throttlesystemrdquo ECTI Transactions on Electrical Engineering Electron-ics and Communications vol 4 no 1 pp 22ndash28 2006
[19] M Horn and M Reichhartinger ldquoSecond-order sliding modecontrol of electronic throttle valvesrdquo in Proceedings of the IEEE10th International Workshop on Variable Structure Systems (VSSrsquo08) pp 280ndash284 IEEE Antalya Turkey June 2008
[20] Y D Pan U Ozguner and O H Dagci ldquoVariable-structurecontrol of electronic throttle valvesrdquo IEEE Transactions onIndustrial Electronics vol 55 no 11 pp 3899ndash3907 2008
[21] R Bai and S Tong ldquoAdaptive backstepping sliding-mode con-trol of the electronic throttle system in modern automobilesrdquoMathematical Problems in Engineering vol 2014 Article ID383064 8 pages 2014
[22] X Yuan Y Wang and L Wu ldquoSVM-based approximate modelcontrol for electronic throttle valverdquo IEEE Transactions onVehicular Technology vol 57 no 5 pp 2747ndash2756 2008
[23] M Baric I Petrovic and N Peric ldquoNeural network-basedsliding mode control of electronic throttlerdquo Engineering Appli-cations of Artificial Intelligence vol 18 no 8 pp 951ndash961 2005
[24] M Nentwig and P Mercorelli ldquoThrottle valve control using aninverse local linear model tree based on a Fuzzy neural net-workrdquo inProceedings of the 7th IEEE International Conference onCybernetic Intelligent Systems (CIS rsquo08) pp 1ndash6 London UKSeptember 2008
[25] M Baric I Petrovic and N Peric ldquoNeural network based slid-ingmode controller for a class of linear systemswith unmatcheduncertaintiesrdquo in Proceedings of the 41st IEEE Conference onDecision and Control vol 1 pp 967ndash972 Las Vegas Nev USADecember 2002
[26] W Sheng and Y Bao ldquoFruit fly optimization algorithm basedfractional order fuzzy-PID controller for electronic throttlerdquoNonlinear Dynamics vol 73 no 1-2 pp 611ndash619 2013
[27] C-H Wang and D-Y Huang ldquoA new intelligent fuzzy con-troller for nonlinear hysteretic electronic throttle in modernintelligent automobilesrdquo IEEE Transactions on Industrial Elec-tronics vol 60 no 6 pp 2332ndash2345 2013
[28] A K Yadav and P Gaur ldquoRobust adaptive speed control ofuncertain hybrid electric vehicle using electronic throttle con-trol with varying road graderdquo Nonlinear Dynamics vol 76 no1 pp 305ndash321 2014
[29] Z J Kang and X Y Chen ldquoA design method of nonlinearextension state observerrdquo Electric Machines and Control vol 5no 3 pp 199ndash203 2001
[30] A A Godbole J P Kolhe and S E Talole ldquoPerformanceanalysis of generalized extended state observer in tacklingsinusoidal disturbancesrdquo IEEE Transactions on Control SystemsTechnology vol 21 no 6 pp 2212ndash2223 2013
[31] Z Gao X Dai T Breikin and H Wang ldquoNovel parameteridentification by using a high-gain observer with applicationto a gas turbine enginerdquo IEEE Transactions on IndustrialInformatics vol 4 no 4 pp 271ndash279 2008
[32] M Morawiec ldquoThe adaptive backstepping control of perma-nent magnet synchronous motor supplied by current sourceinverterrdquo IEEE Transactions on Industrial Informatics vol 9 no2 pp 1047ndash1055 2013
[33] J R Dominguez A Navarrete M A Meza A G Loukianovand J Canedo ldquoDigital sliding-mode sensorless control forsurface-mounted PMSMrdquo IEEE Transactions on IndustrialInformatics vol 10 no 1 pp 137ndash151 2014
[34] D Zhao T Zou S Li and Q Zhu ldquoAdaptive backsteppingsliding mode control for leader-follower multi-agent systemsrdquoIET Control Theory amp Applications vol 6 no 8 pp 1109ndash11172012
Mathematical Problems in Engineering 11
[35] Y C Fang P C Wang N Sun and Y C Zhang ldquoDynamicsanalysis and nonlinear control of an offshore boom cranerdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 414ndash4272014
[36] Y Xia Z Zhu and M Fu ldquoBack-stepping sliding mode controlfor missile systems based on an extended state observerrdquo IETControl Theory amp Applications vol 5 no 1 pp 93ndash102 2011
[37] N Sun Y C Fang and H Chen ldquoA new antiswing controlmethod for underactuated cranes with unmodeled uncer-tainties theoretical design and hardware experimentsrdquo IEEETransactions on Industrial Electronics vol 62 no 1 pp 453ndash4652015
[38] X Zhang Y Fang andN Sun ldquoMinimum-time trajectory plan-ning for underactuated overhead crane systems with state andcontrol constraintsrdquo IEEETransactions on Industrial Electronicsvol 61 no 12 pp 6915ndash6925 2014
[39] E Hendricks and S C Sorenson ldquoMean value modelling ofspark ignition enginesrdquo SAE Technical Paper 900616 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
where_119865 is the estimation of 119865 and the parameter updating
law is designed as
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) + 1199092minus 120579119889] (42)
Theorem 3 With the proposed adaptive controller in (41) andthe parameter estimation law in (42) if |119876| gt 0 with
119876 =[[
[
1198881+ 1205811198962
11205811198961minus1
2
1205811198961minus1
2120581
]]
]
(43)
then the closed-loop system is stable in the sense that
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(44)
Proof Firstly we assume that the parametric uncertaintiesand external disturbance change slowly then = 0 Todesign the controller with adaptive capability of parametricuncertainties the candidate Lyapunov function is defined asfollows [37]
1198813= 1198812+
1
21205821198652
(45)
where 119865 = 119865 minus_119865 and
_119865 is the estimation of 119865 120582 gt 0 Then
3= 2minus1
120582119865_119865
= 11991111199112minus 11988811199112
1
+ 119878 [1198961(1199112minus 11988811199111) + 119860x + 119861119906 +
_119865 minus 120579
119889+ 11988811]
minus1
120582119865(
_119865 minus 120582119878)
(46)
Based on (46) we let
119906 =1
119861[minus1198961(1199112minus 11988811199111) minus 119860xminus
_119865 + 120579119889minus 11988811
minus 120581 (119878 + 120578 sgn (119878))]
=119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091minus
_119865 +
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
1199092
+ 120579119889minus (1198961+ 1198881) 1199092+ 119896111988811199111+ (1198961+ 1198881) 120579119889
minus 120581 (119878 + 120578 sgn (119878))]
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) + 1199092minus 120579119889]
(47)
Hence substituting (47) into (46) we have
3= 2minus1
120582119865_119865 = 119911
11199112minus 11988811199112
1minus 1205811198782
minus 120581120578 |119878| (48)
0 t
Clock To workspace
State
To workspace
Input Signal
Throttle Controller
Throttle Observer
Throttle Plant
Equation (51)
Equation (20)
Equation (8)
Figure 3 Simulink main program
According to (36) we can rewrite (48) as
3le minus119911
TQ119911 minus 120581120578 |119878| (49)
If 119876 is a positive definite matrix then 3le 0 Hence the
proposed adaptive controller is Lyapunov stableSimilar to the proof of Theorem 2 then we can use
Barbalatrsquos Lemma to obtain that [38]
lim119905rarrinfin
1199111(119905) = 0 lim
119905rarrinfin
1199112(119905) = 0 lim
119905rarrinfin
119878 (119905) = 0
(50)
Based on the above discussion if the immeasurablevariable 119909
2in (47) is replaced with the estimation value
_1199092 we can obtain the back-stepping SMC incorporating the
proposed ESO as follows
119906 =119896119897119869119877119886
119896119905119896ch
[
minus (120587119896sp + 2119896119896pre)
1205871198962
119897119869
1199091+
1198962
119897119896119905119896V + 119896119891119877119886
1198962
119897119869119877119886
_1199092minus
_119865
+ 120579119889minus (1198961+ 1198881)_1199092+ (1198961+ 1198881) 120579119889+ 119896111988811199111
minus 120581 (119878 + 120578 sgn (119878))]
_119865 = 120582119878 = 120582 [(119896
1+ 1198881) (1199091minus 120579119889) +
_1199092minus 120579119889]
(51)
5 Numerical Experiments
51 Simulations In order to verify the effectiveness of theproposed controller the simulation of ETC is conductedunder the MatlabSimulink platform based on the dynamiccharacteristics of ET valve In addition we choose 119892(119895) =
(1minus119890minus119895
)(1+119890minus119895
)Thewhole Simulinkmain program is shownin Figure 3 and the basic parameter configuration of ET islisted in Table 1
According to the requirement of ETC in engineeringapplications given in [12] the reference inputs are chosen asthe step and sine signals respectively Figure 4 depicts thesignal tracking results using the step reference signal whenthe desired throttle opening is 60∘ Figure 4 shows that theposition of ET is able to track the reference signal withoutovershoot within 100ms while the tracking results with
Mathematical Problems in Engineering 7
Table 1 Basic parameter comfiguration of ET
Parameters Value Units1205790
2 deg119896119897
1695 mdash119896119905
0016 NsdotmA119896pre 0107 Nsdotm119877119886
28 Ω
119869 4 times 10minus6 kgsdotm2
119896119905119891
00048 Nsdotm119896ch 24 mdash119896V 0016 Vsdotsrad119896119891
4 times 10minus4 Nsdotmsdotsrad119896sp 00247 Nsdotmrad
0 02 04 06 08 10
10
20
30
40
50
60
70
Time (s)
Desired inputActual output
001 002 003 004 005505254565860
Thro
ttle a
ngle
(deg
)
Figure 4 Step tracking response
the sine reference signal are shown in Figure 5 FromFigures 4and 5 the results show that the proposed controller can satisfythe ET tracking control requirement in [12] with the step andsine reference signals
As foregoing discussion those parameters (119896119905 119896119905119891 119896sp) are
designed using Lyapunov techniques Figure 6 is the stepresponse of ETC with parametric uncertainties when desiredthrottle opening is 60∘ and the parameters Δ119896
119905= plusmn00048
Δ119896119905119891
= plusmn00014 Δ119896sp = plusmn00074 Figure 6 shows that thesettling time of ETC is less than 100ms Figure 6 also showsthat the steady-state error of ETC tends to zero Figure 7 isthe adaptive estimation value of the total uncertainty 119865 Inaddition the results form Figure 6 show that the proposedcontroller has a better robustness compared with Figure 4
The discussion mentioned above demonstrates that theproposed controller has strong robustness with respect toparametric uncertaintiesThat is to say a stable vehicle speedcan be guaranteed since the adaptive controller can quicklyadjust the opening angle of ET valve when an externaldisturbance occurs
0 005 01202530354045
0 02 04 06 08 1
0
10
20
30
40
50
60
70
Time (s)
Desired inputActual output
minus10
Thro
ttle a
ngle
(deg
)
Figure 5 Sine tracking response
0
20
40
60
80
0 002 004 006565860
0 002 004 006
0 02 04 06 08 1Time (s)
0 02 04 06 08 1Time (s)
Desired inputActual output
minus60
minus40
minus20
0
20
minus6minus4minus20
Trac
king
erro
rs (d
eg)
Thro
ttle a
ngle
(deg
)
Figure 6 Step tracking response of parameters changes
In practical application the mutation of throttle openingis inevitable which has important influence on vehicle accel-erationdeceleration Furthermore traffic congestion willlead to the stop-and-go phenomenon in traffic flow furtherresulting in the vehicle speed change Hence ET should havegood responsiveness capability to track the change
Therefore it is significant to conduct analysis on the con-troller performance under the condition of input signalmuta-tion Moreover the nonlinear spring does not allow openingangles below 5∘ and above 80∘ [20] the experiment under theminimum and maximum values of square reference signalis set as 10∘ and 60∘ respectively as shown in Figure 8Figure 8 shows that the proposed controller can track thesmall values accurately (the important condition of idle speedcontrol) so does the large values (the essential condition of
8 Mathematical Problems in Engineering
Table 2 Controller performance comparison
Control methods Setting time Steady-state errors under parameter change OvershootBack-stepping control in [4] lt140ms lt2∘ a littleController of this present paper lt100ms lt01∘ little
F ad
aptiv
e val
ue
0 02 04 06 08 1Time (s)
minus1400
minus1200
minus1000
minus800
minus600
minus400
minus200
0
Figure 7 Estimation of 119865
0
20
40
60
80
0 02 04 06 08 1Time (s)
Desired inputActual output
Trac
king
erro
rs (d
eg)
0 02 04 06 08 1Time (s)
minus100
minus50
0
50
100
Thro
ttle a
ngle
(deg
)
Figure 8 Square wave tracking response
vehicle acceleration) In addition the settling time is less thanrequired 100ms On the other hand Figure 8 also showsthat the steady-state errors approximate 0 which illustratesthat the proposed controller can satisfy the requirement ofETC Hence the results from this simulation show that thedesigned controller also has a good control performanceunder square wave input signal It also implies that the vehiclein the platoon can follow the preceding vehicles with safe
space headway and safe speed via ETC when the stop-and-go phenomenon emerges
52 Performance Comparison Compared with the literature[4] this study considers not only the external disturbancebut also the parametric uncertainties and the torque causedby the air flow Then the adaptive law is designed using theLyapunov techniques Finally the experiment is conductedusing simulation and the comparison results are summarizedin Table 2 Table 2 shows that the proposed adaptive back-stepping SMC has better control performance than the back-stepping controller in [4] in terms of the settling time steady-state error and the overshoot
53 Simulated Experiment In this section we incorporatethe ET controller withmean valuemodeling of spark ignitionengine under the conditions of pressing the accelerator pedaland easing it off [39] The schematic block diagram of mainsimulation is shown in Figure 9 Figure 10 shows the throttleopening angle tracking performance It can be seen thatthe proposed controller can track the desired input signaleffectively Figures 11 12 and 13 show the manifold pressureengine speed and throttle airflow respectively The resultsshow that the proposed controller can control the engineaccurately via ETC
6 Conclusions
To improve the accuracy of the information for ETC underV2V communications an ESO based adaptive back-steppingSMC is proposed based on the Lyapunov theory in thepresence of high nonlinearity of ET and immeasurable signalsfor throttle opening angle change In addition with thedesigned adaptive law strong robustness to parametric uncer-tainties and external disturbance can be achieved Simulationresults show that the proposed controller can track thedesired reference input signal fast and accurately with strongrobustness to uncertainties and disturbances
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thiswork is jointly supported by theNationalNatural ScienceFoundation of China (Grant no 61304197) the Scientific and
Mathematical Problems in Engineering 9
Desiredinput
Mean valueModelling of spark
Ignition engines
Actual output
Manifold pressureEngine speedThrottle airflow
+
minus
Throttle Controller Throttle Model
Equation (51) Equation (8)
Figure 9 Schematic block diagram of main simulation
0 2 4 6 8 10Time (s)
0
10
20
30
40
50
60
70
Thro
ttle a
ngle
(deg
)
Desired inputActual output
Figure 10 Throttle opening angle
0 2 4 6 8 104
5
6
7
8
9
10
Man
ifold
pre
ssur
e (pa
)
Time (s)
times104
Figure 11 Manifold pressure
Technological Talents of Chongqing (Grant no cstc2014kjrc-qnrc30002) the Key Project of Application andDevelopmentof Chongqing (Grant no cstc2014yykfB40001) the NatureScience Funds of Education Committee of Chongqing (Grantno KJ130506) Natural Science Funds of Chongqing (Grantnos cstc2014jcyjA60003 and cstc2012jjA40035) and Natural
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Engi
ne sp
eed
(rpm
)
0 2 4 6 8 10Time (s)
Figure 12 Engine speed
Thro
ttle a
irflow
(gs
)
0 2 4 6 8 10Time (s)
minus15
minus10
minus5
0
5
10
15
20
25
Figure 13 Throttle airflow
Science Funds of CQUPT (Grant nos A2012-78 and A2013-27) The authors would like to express their gratitude toDr Hongchun Qu and Dr Xiaoming Tang from ChongqingUniversity of Posts and Telecommunications for their gooddiscussions on the paper preparation
References
[1] V Milanes S E Shladover J Spring C Nowakowski HKawazoe and M Nakamura ldquoCooperative adaptive cruise
10 Mathematical Problems in Engineering
control in real traffic situationsrdquo IEEETransactions on IntelligentTransportation Systems vol 15 no 1 pp 296ndash305 2014
[2] D-H Sun Y-F Li W-N Liu M Zhao and X-Y Liao ldquoResearch summary on transportation cyber physical systems andthe challenging technologiesrdquo China Journal of Highway andTransport vol 26 no 1 pp 144ndash154 2013
[3] L Li D Wen and D Yao ldquoA survey of traffic control withvehicular communicationsrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 425ndash432 2014
[4] Y FHuC Li J LiH YGuo P Y Sun andHChen ldquoObserver-based output feedback control of electronic throttlesrdquo ActaAutomatica Sinica vol 37 no 6 pp 746ndash754 2011
[5] P Ioannou and Z Xu ldquoThrottle and brake control system forautomatic vehicle followingrdquo Journal of Intelligent Transporta-tion Systems vol 1 no 4 pp 345ndash377 1994
[6] Y Li and D Sun ldquoMicroscopic car-following model for thetraffic flow the state of the artrdquo Journal of Control Theory andApplications vol 10 no 2 pp 133ndash143 2012
[7] T Tang W Shi H Shang and Y Wang ldquoA new car-followingmodel with consideration of inter-vehicle communicationrdquoNonlinear Dynamics vol 76 no 4 pp 2017ndash2023 2014
[8] J Ploeg N Van DeWouw and H Nijmeijer ldquoLp string stabilityof cascaded systems application to vehicle platooningrdquo IEEETransactions on Control Systems Technology vol 22 no 2 pp786ndash793 2014
[9] W Wang S S Liao X Li and J S Ren ldquoThe processof information propagation along a traffic stream throughintervehicle communicationrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 345ndash354 2014
[10] L Xiao and F Gao ldquoPractical string stability of platoon of adap-tive cruise control vehiclesrdquo IEEE Transactions on IntelligentTransportation Systems vol 12 no 4 pp 1184ndash1194 2011
[11] X F Yuan Y N Wang L H Wu X Z Zhang and WSun ldquoNeural network based self-learning control strategy forelectronic throttle valverdquo IEEE Transactions on Vehicular Tech-nology vol 59 no 8 pp 3757ndash3765 2010
[12] J Deur D Pavkovic N Peric M Jansz and D Hrovat ldquoAnelectronic throttle control strategy including compensation offriction and limp-home effectsrdquo IEEE Transactions on IndustryApplications vol 40 no 3 pp 821ndash834 2004
[13] D Pavkovic J DeurM Jansz andN Peric ldquoAdaptive control ofautomotive electronic throttlerdquo Control Engineering Practicevol 14 no 2 pp 121ndash136 2006
[14] X Yuan and Y Wang ldquoA novel electronic-throttle-valve con-troller based on approximate model methodrdquo IEEE Transac-tions on Industrial Electronics vol 56 no 3 pp 883ndash890 2009
[15] M Vasak M Baotic MMorari I Petrovic and N Peric ldquoCon-strained optimal control of an electronic throttlerdquo InternationalJournal of Control vol 79 no 5 pp 465ndash478 2006
[16] M Vasak M Baotic I Petrovic and N Peric ldquoHybrid theory-based time-optimal control of an electronic throttlerdquo IEEETransactions on Industrial Electronics vol 54 no 3 pp 1483ndash1494 2007
[17] D Kim H Peng S Bai and J M Maguire ldquoControl ofintegrated powertrain with electronic throttle and automatictransmissionrdquo IEEE Transactions on Control Systems Technol-ogy vol 15 no 3 pp 474ndash482 2007
[18] K Nakano U Sawut K Higuchi and Y Okajima ldquoModellingand observer-based sliding-mode control of electronic throttlesystemrdquo ECTI Transactions on Electrical Engineering Electron-ics and Communications vol 4 no 1 pp 22ndash28 2006
[19] M Horn and M Reichhartinger ldquoSecond-order sliding modecontrol of electronic throttle valvesrdquo in Proceedings of the IEEE10th International Workshop on Variable Structure Systems (VSSrsquo08) pp 280ndash284 IEEE Antalya Turkey June 2008
[20] Y D Pan U Ozguner and O H Dagci ldquoVariable-structurecontrol of electronic throttle valvesrdquo IEEE Transactions onIndustrial Electronics vol 55 no 11 pp 3899ndash3907 2008
[21] R Bai and S Tong ldquoAdaptive backstepping sliding-mode con-trol of the electronic throttle system in modern automobilesrdquoMathematical Problems in Engineering vol 2014 Article ID383064 8 pages 2014
[22] X Yuan Y Wang and L Wu ldquoSVM-based approximate modelcontrol for electronic throttle valverdquo IEEE Transactions onVehicular Technology vol 57 no 5 pp 2747ndash2756 2008
[23] M Baric I Petrovic and N Peric ldquoNeural network-basedsliding mode control of electronic throttlerdquo Engineering Appli-cations of Artificial Intelligence vol 18 no 8 pp 951ndash961 2005
[24] M Nentwig and P Mercorelli ldquoThrottle valve control using aninverse local linear model tree based on a Fuzzy neural net-workrdquo inProceedings of the 7th IEEE International Conference onCybernetic Intelligent Systems (CIS rsquo08) pp 1ndash6 London UKSeptember 2008
[25] M Baric I Petrovic and N Peric ldquoNeural network based slid-ingmode controller for a class of linear systemswith unmatcheduncertaintiesrdquo in Proceedings of the 41st IEEE Conference onDecision and Control vol 1 pp 967ndash972 Las Vegas Nev USADecember 2002
[26] W Sheng and Y Bao ldquoFruit fly optimization algorithm basedfractional order fuzzy-PID controller for electronic throttlerdquoNonlinear Dynamics vol 73 no 1-2 pp 611ndash619 2013
[27] C-H Wang and D-Y Huang ldquoA new intelligent fuzzy con-troller for nonlinear hysteretic electronic throttle in modernintelligent automobilesrdquo IEEE Transactions on Industrial Elec-tronics vol 60 no 6 pp 2332ndash2345 2013
[28] A K Yadav and P Gaur ldquoRobust adaptive speed control ofuncertain hybrid electric vehicle using electronic throttle con-trol with varying road graderdquo Nonlinear Dynamics vol 76 no1 pp 305ndash321 2014
[29] Z J Kang and X Y Chen ldquoA design method of nonlinearextension state observerrdquo Electric Machines and Control vol 5no 3 pp 199ndash203 2001
[30] A A Godbole J P Kolhe and S E Talole ldquoPerformanceanalysis of generalized extended state observer in tacklingsinusoidal disturbancesrdquo IEEE Transactions on Control SystemsTechnology vol 21 no 6 pp 2212ndash2223 2013
[31] Z Gao X Dai T Breikin and H Wang ldquoNovel parameteridentification by using a high-gain observer with applicationto a gas turbine enginerdquo IEEE Transactions on IndustrialInformatics vol 4 no 4 pp 271ndash279 2008
[32] M Morawiec ldquoThe adaptive backstepping control of perma-nent magnet synchronous motor supplied by current sourceinverterrdquo IEEE Transactions on Industrial Informatics vol 9 no2 pp 1047ndash1055 2013
[33] J R Dominguez A Navarrete M A Meza A G Loukianovand J Canedo ldquoDigital sliding-mode sensorless control forsurface-mounted PMSMrdquo IEEE Transactions on IndustrialInformatics vol 10 no 1 pp 137ndash151 2014
[34] D Zhao T Zou S Li and Q Zhu ldquoAdaptive backsteppingsliding mode control for leader-follower multi-agent systemsrdquoIET Control Theory amp Applications vol 6 no 8 pp 1109ndash11172012
Mathematical Problems in Engineering 11
[35] Y C Fang P C Wang N Sun and Y C Zhang ldquoDynamicsanalysis and nonlinear control of an offshore boom cranerdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 414ndash4272014
[36] Y Xia Z Zhu and M Fu ldquoBack-stepping sliding mode controlfor missile systems based on an extended state observerrdquo IETControl Theory amp Applications vol 5 no 1 pp 93ndash102 2011
[37] N Sun Y C Fang and H Chen ldquoA new antiswing controlmethod for underactuated cranes with unmodeled uncer-tainties theoretical design and hardware experimentsrdquo IEEETransactions on Industrial Electronics vol 62 no 1 pp 453ndash4652015
[38] X Zhang Y Fang andN Sun ldquoMinimum-time trajectory plan-ning for underactuated overhead crane systems with state andcontrol constraintsrdquo IEEETransactions on Industrial Electronicsvol 61 no 12 pp 6915ndash6925 2014
[39] E Hendricks and S C Sorenson ldquoMean value modelling ofspark ignition enginesrdquo SAE Technical Paper 900616 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Table 1 Basic parameter comfiguration of ET
Parameters Value Units1205790
2 deg119896119897
1695 mdash119896119905
0016 NsdotmA119896pre 0107 Nsdotm119877119886
28 Ω
119869 4 times 10minus6 kgsdotm2
119896119905119891
00048 Nsdotm119896ch 24 mdash119896V 0016 Vsdotsrad119896119891
4 times 10minus4 Nsdotmsdotsrad119896sp 00247 Nsdotmrad
0 02 04 06 08 10
10
20
30
40
50
60
70
Time (s)
Desired inputActual output
001 002 003 004 005505254565860
Thro
ttle a
ngle
(deg
)
Figure 4 Step tracking response
the sine reference signal are shown in Figure 5 FromFigures 4and 5 the results show that the proposed controller can satisfythe ET tracking control requirement in [12] with the step andsine reference signals
As foregoing discussion those parameters (119896119905 119896119905119891 119896sp) are
designed using Lyapunov techniques Figure 6 is the stepresponse of ETC with parametric uncertainties when desiredthrottle opening is 60∘ and the parameters Δ119896
119905= plusmn00048
Δ119896119905119891
= plusmn00014 Δ119896sp = plusmn00074 Figure 6 shows that thesettling time of ETC is less than 100ms Figure 6 also showsthat the steady-state error of ETC tends to zero Figure 7 isthe adaptive estimation value of the total uncertainty 119865 Inaddition the results form Figure 6 show that the proposedcontroller has a better robustness compared with Figure 4
The discussion mentioned above demonstrates that theproposed controller has strong robustness with respect toparametric uncertaintiesThat is to say a stable vehicle speedcan be guaranteed since the adaptive controller can quicklyadjust the opening angle of ET valve when an externaldisturbance occurs
0 005 01202530354045
0 02 04 06 08 1
0
10
20
30
40
50
60
70
Time (s)
Desired inputActual output
minus10
Thro
ttle a
ngle
(deg
)
Figure 5 Sine tracking response
0
20
40
60
80
0 002 004 006565860
0 002 004 006
0 02 04 06 08 1Time (s)
0 02 04 06 08 1Time (s)
Desired inputActual output
minus60
minus40
minus20
0
20
minus6minus4minus20
Trac
king
erro
rs (d
eg)
Thro
ttle a
ngle
(deg
)
Figure 6 Step tracking response of parameters changes
In practical application the mutation of throttle openingis inevitable which has important influence on vehicle accel-erationdeceleration Furthermore traffic congestion willlead to the stop-and-go phenomenon in traffic flow furtherresulting in the vehicle speed change Hence ET should havegood responsiveness capability to track the change
Therefore it is significant to conduct analysis on the con-troller performance under the condition of input signalmuta-tion Moreover the nonlinear spring does not allow openingangles below 5∘ and above 80∘ [20] the experiment under theminimum and maximum values of square reference signalis set as 10∘ and 60∘ respectively as shown in Figure 8Figure 8 shows that the proposed controller can track thesmall values accurately (the important condition of idle speedcontrol) so does the large values (the essential condition of
8 Mathematical Problems in Engineering
Table 2 Controller performance comparison
Control methods Setting time Steady-state errors under parameter change OvershootBack-stepping control in [4] lt140ms lt2∘ a littleController of this present paper lt100ms lt01∘ little
F ad
aptiv
e val
ue
0 02 04 06 08 1Time (s)
minus1400
minus1200
minus1000
minus800
minus600
minus400
minus200
0
Figure 7 Estimation of 119865
0
20
40
60
80
0 02 04 06 08 1Time (s)
Desired inputActual output
Trac
king
erro
rs (d
eg)
0 02 04 06 08 1Time (s)
minus100
minus50
0
50
100
Thro
ttle a
ngle
(deg
)
Figure 8 Square wave tracking response
vehicle acceleration) In addition the settling time is less thanrequired 100ms On the other hand Figure 8 also showsthat the steady-state errors approximate 0 which illustratesthat the proposed controller can satisfy the requirement ofETC Hence the results from this simulation show that thedesigned controller also has a good control performanceunder square wave input signal It also implies that the vehiclein the platoon can follow the preceding vehicles with safe
space headway and safe speed via ETC when the stop-and-go phenomenon emerges
52 Performance Comparison Compared with the literature[4] this study considers not only the external disturbancebut also the parametric uncertainties and the torque causedby the air flow Then the adaptive law is designed using theLyapunov techniques Finally the experiment is conductedusing simulation and the comparison results are summarizedin Table 2 Table 2 shows that the proposed adaptive back-stepping SMC has better control performance than the back-stepping controller in [4] in terms of the settling time steady-state error and the overshoot
53 Simulated Experiment In this section we incorporatethe ET controller withmean valuemodeling of spark ignitionengine under the conditions of pressing the accelerator pedaland easing it off [39] The schematic block diagram of mainsimulation is shown in Figure 9 Figure 10 shows the throttleopening angle tracking performance It can be seen thatthe proposed controller can track the desired input signaleffectively Figures 11 12 and 13 show the manifold pressureengine speed and throttle airflow respectively The resultsshow that the proposed controller can control the engineaccurately via ETC
6 Conclusions
To improve the accuracy of the information for ETC underV2V communications an ESO based adaptive back-steppingSMC is proposed based on the Lyapunov theory in thepresence of high nonlinearity of ET and immeasurable signalsfor throttle opening angle change In addition with thedesigned adaptive law strong robustness to parametric uncer-tainties and external disturbance can be achieved Simulationresults show that the proposed controller can track thedesired reference input signal fast and accurately with strongrobustness to uncertainties and disturbances
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thiswork is jointly supported by theNationalNatural ScienceFoundation of China (Grant no 61304197) the Scientific and
Mathematical Problems in Engineering 9
Desiredinput
Mean valueModelling of spark
Ignition engines
Actual output
Manifold pressureEngine speedThrottle airflow
+
minus
Throttle Controller Throttle Model
Equation (51) Equation (8)
Figure 9 Schematic block diagram of main simulation
0 2 4 6 8 10Time (s)
0
10
20
30
40
50
60
70
Thro
ttle a
ngle
(deg
)
Desired inputActual output
Figure 10 Throttle opening angle
0 2 4 6 8 104
5
6
7
8
9
10
Man
ifold
pre
ssur
e (pa
)
Time (s)
times104
Figure 11 Manifold pressure
Technological Talents of Chongqing (Grant no cstc2014kjrc-qnrc30002) the Key Project of Application andDevelopmentof Chongqing (Grant no cstc2014yykfB40001) the NatureScience Funds of Education Committee of Chongqing (Grantno KJ130506) Natural Science Funds of Chongqing (Grantnos cstc2014jcyjA60003 and cstc2012jjA40035) and Natural
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Engi
ne sp
eed
(rpm
)
0 2 4 6 8 10Time (s)
Figure 12 Engine speed
Thro
ttle a
irflow
(gs
)
0 2 4 6 8 10Time (s)
minus15
minus10
minus5
0
5
10
15
20
25
Figure 13 Throttle airflow
Science Funds of CQUPT (Grant nos A2012-78 and A2013-27) The authors would like to express their gratitude toDr Hongchun Qu and Dr Xiaoming Tang from ChongqingUniversity of Posts and Telecommunications for their gooddiscussions on the paper preparation
References
[1] V Milanes S E Shladover J Spring C Nowakowski HKawazoe and M Nakamura ldquoCooperative adaptive cruise
10 Mathematical Problems in Engineering
control in real traffic situationsrdquo IEEETransactions on IntelligentTransportation Systems vol 15 no 1 pp 296ndash305 2014
[2] D-H Sun Y-F Li W-N Liu M Zhao and X-Y Liao ldquoResearch summary on transportation cyber physical systems andthe challenging technologiesrdquo China Journal of Highway andTransport vol 26 no 1 pp 144ndash154 2013
[3] L Li D Wen and D Yao ldquoA survey of traffic control withvehicular communicationsrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 425ndash432 2014
[4] Y FHuC Li J LiH YGuo P Y Sun andHChen ldquoObserver-based output feedback control of electronic throttlesrdquo ActaAutomatica Sinica vol 37 no 6 pp 746ndash754 2011
[5] P Ioannou and Z Xu ldquoThrottle and brake control system forautomatic vehicle followingrdquo Journal of Intelligent Transporta-tion Systems vol 1 no 4 pp 345ndash377 1994
[6] Y Li and D Sun ldquoMicroscopic car-following model for thetraffic flow the state of the artrdquo Journal of Control Theory andApplications vol 10 no 2 pp 133ndash143 2012
[7] T Tang W Shi H Shang and Y Wang ldquoA new car-followingmodel with consideration of inter-vehicle communicationrdquoNonlinear Dynamics vol 76 no 4 pp 2017ndash2023 2014
[8] J Ploeg N Van DeWouw and H Nijmeijer ldquoLp string stabilityof cascaded systems application to vehicle platooningrdquo IEEETransactions on Control Systems Technology vol 22 no 2 pp786ndash793 2014
[9] W Wang S S Liao X Li and J S Ren ldquoThe processof information propagation along a traffic stream throughintervehicle communicationrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 345ndash354 2014
[10] L Xiao and F Gao ldquoPractical string stability of platoon of adap-tive cruise control vehiclesrdquo IEEE Transactions on IntelligentTransportation Systems vol 12 no 4 pp 1184ndash1194 2011
[11] X F Yuan Y N Wang L H Wu X Z Zhang and WSun ldquoNeural network based self-learning control strategy forelectronic throttle valverdquo IEEE Transactions on Vehicular Tech-nology vol 59 no 8 pp 3757ndash3765 2010
[12] J Deur D Pavkovic N Peric M Jansz and D Hrovat ldquoAnelectronic throttle control strategy including compensation offriction and limp-home effectsrdquo IEEE Transactions on IndustryApplications vol 40 no 3 pp 821ndash834 2004
[13] D Pavkovic J DeurM Jansz andN Peric ldquoAdaptive control ofautomotive electronic throttlerdquo Control Engineering Practicevol 14 no 2 pp 121ndash136 2006
[14] X Yuan and Y Wang ldquoA novel electronic-throttle-valve con-troller based on approximate model methodrdquo IEEE Transac-tions on Industrial Electronics vol 56 no 3 pp 883ndash890 2009
[15] M Vasak M Baotic MMorari I Petrovic and N Peric ldquoCon-strained optimal control of an electronic throttlerdquo InternationalJournal of Control vol 79 no 5 pp 465ndash478 2006
[16] M Vasak M Baotic I Petrovic and N Peric ldquoHybrid theory-based time-optimal control of an electronic throttlerdquo IEEETransactions on Industrial Electronics vol 54 no 3 pp 1483ndash1494 2007
[17] D Kim H Peng S Bai and J M Maguire ldquoControl ofintegrated powertrain with electronic throttle and automatictransmissionrdquo IEEE Transactions on Control Systems Technol-ogy vol 15 no 3 pp 474ndash482 2007
[18] K Nakano U Sawut K Higuchi and Y Okajima ldquoModellingand observer-based sliding-mode control of electronic throttlesystemrdquo ECTI Transactions on Electrical Engineering Electron-ics and Communications vol 4 no 1 pp 22ndash28 2006
[19] M Horn and M Reichhartinger ldquoSecond-order sliding modecontrol of electronic throttle valvesrdquo in Proceedings of the IEEE10th International Workshop on Variable Structure Systems (VSSrsquo08) pp 280ndash284 IEEE Antalya Turkey June 2008
[20] Y D Pan U Ozguner and O H Dagci ldquoVariable-structurecontrol of electronic throttle valvesrdquo IEEE Transactions onIndustrial Electronics vol 55 no 11 pp 3899ndash3907 2008
[21] R Bai and S Tong ldquoAdaptive backstepping sliding-mode con-trol of the electronic throttle system in modern automobilesrdquoMathematical Problems in Engineering vol 2014 Article ID383064 8 pages 2014
[22] X Yuan Y Wang and L Wu ldquoSVM-based approximate modelcontrol for electronic throttle valverdquo IEEE Transactions onVehicular Technology vol 57 no 5 pp 2747ndash2756 2008
[23] M Baric I Petrovic and N Peric ldquoNeural network-basedsliding mode control of electronic throttlerdquo Engineering Appli-cations of Artificial Intelligence vol 18 no 8 pp 951ndash961 2005
[24] M Nentwig and P Mercorelli ldquoThrottle valve control using aninverse local linear model tree based on a Fuzzy neural net-workrdquo inProceedings of the 7th IEEE International Conference onCybernetic Intelligent Systems (CIS rsquo08) pp 1ndash6 London UKSeptember 2008
[25] M Baric I Petrovic and N Peric ldquoNeural network based slid-ingmode controller for a class of linear systemswith unmatcheduncertaintiesrdquo in Proceedings of the 41st IEEE Conference onDecision and Control vol 1 pp 967ndash972 Las Vegas Nev USADecember 2002
[26] W Sheng and Y Bao ldquoFruit fly optimization algorithm basedfractional order fuzzy-PID controller for electronic throttlerdquoNonlinear Dynamics vol 73 no 1-2 pp 611ndash619 2013
[27] C-H Wang and D-Y Huang ldquoA new intelligent fuzzy con-troller for nonlinear hysteretic electronic throttle in modernintelligent automobilesrdquo IEEE Transactions on Industrial Elec-tronics vol 60 no 6 pp 2332ndash2345 2013
[28] A K Yadav and P Gaur ldquoRobust adaptive speed control ofuncertain hybrid electric vehicle using electronic throttle con-trol with varying road graderdquo Nonlinear Dynamics vol 76 no1 pp 305ndash321 2014
[29] Z J Kang and X Y Chen ldquoA design method of nonlinearextension state observerrdquo Electric Machines and Control vol 5no 3 pp 199ndash203 2001
[30] A A Godbole J P Kolhe and S E Talole ldquoPerformanceanalysis of generalized extended state observer in tacklingsinusoidal disturbancesrdquo IEEE Transactions on Control SystemsTechnology vol 21 no 6 pp 2212ndash2223 2013
[31] Z Gao X Dai T Breikin and H Wang ldquoNovel parameteridentification by using a high-gain observer with applicationto a gas turbine enginerdquo IEEE Transactions on IndustrialInformatics vol 4 no 4 pp 271ndash279 2008
[32] M Morawiec ldquoThe adaptive backstepping control of perma-nent magnet synchronous motor supplied by current sourceinverterrdquo IEEE Transactions on Industrial Informatics vol 9 no2 pp 1047ndash1055 2013
[33] J R Dominguez A Navarrete M A Meza A G Loukianovand J Canedo ldquoDigital sliding-mode sensorless control forsurface-mounted PMSMrdquo IEEE Transactions on IndustrialInformatics vol 10 no 1 pp 137ndash151 2014
[34] D Zhao T Zou S Li and Q Zhu ldquoAdaptive backsteppingsliding mode control for leader-follower multi-agent systemsrdquoIET Control Theory amp Applications vol 6 no 8 pp 1109ndash11172012
Mathematical Problems in Engineering 11
[35] Y C Fang P C Wang N Sun and Y C Zhang ldquoDynamicsanalysis and nonlinear control of an offshore boom cranerdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 414ndash4272014
[36] Y Xia Z Zhu and M Fu ldquoBack-stepping sliding mode controlfor missile systems based on an extended state observerrdquo IETControl Theory amp Applications vol 5 no 1 pp 93ndash102 2011
[37] N Sun Y C Fang and H Chen ldquoA new antiswing controlmethod for underactuated cranes with unmodeled uncer-tainties theoretical design and hardware experimentsrdquo IEEETransactions on Industrial Electronics vol 62 no 1 pp 453ndash4652015
[38] X Zhang Y Fang andN Sun ldquoMinimum-time trajectory plan-ning for underactuated overhead crane systems with state andcontrol constraintsrdquo IEEETransactions on Industrial Electronicsvol 61 no 12 pp 6915ndash6925 2014
[39] E Hendricks and S C Sorenson ldquoMean value modelling ofspark ignition enginesrdquo SAE Technical Paper 900616 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
Table 2 Controller performance comparison
Control methods Setting time Steady-state errors under parameter change OvershootBack-stepping control in [4] lt140ms lt2∘ a littleController of this present paper lt100ms lt01∘ little
F ad
aptiv
e val
ue
0 02 04 06 08 1Time (s)
minus1400
minus1200
minus1000
minus800
minus600
minus400
minus200
0
Figure 7 Estimation of 119865
0
20
40
60
80
0 02 04 06 08 1Time (s)
Desired inputActual output
Trac
king
erro
rs (d
eg)
0 02 04 06 08 1Time (s)
minus100
minus50
0
50
100
Thro
ttle a
ngle
(deg
)
Figure 8 Square wave tracking response
vehicle acceleration) In addition the settling time is less thanrequired 100ms On the other hand Figure 8 also showsthat the steady-state errors approximate 0 which illustratesthat the proposed controller can satisfy the requirement ofETC Hence the results from this simulation show that thedesigned controller also has a good control performanceunder square wave input signal It also implies that the vehiclein the platoon can follow the preceding vehicles with safe
space headway and safe speed via ETC when the stop-and-go phenomenon emerges
52 Performance Comparison Compared with the literature[4] this study considers not only the external disturbancebut also the parametric uncertainties and the torque causedby the air flow Then the adaptive law is designed using theLyapunov techniques Finally the experiment is conductedusing simulation and the comparison results are summarizedin Table 2 Table 2 shows that the proposed adaptive back-stepping SMC has better control performance than the back-stepping controller in [4] in terms of the settling time steady-state error and the overshoot
53 Simulated Experiment In this section we incorporatethe ET controller withmean valuemodeling of spark ignitionengine under the conditions of pressing the accelerator pedaland easing it off [39] The schematic block diagram of mainsimulation is shown in Figure 9 Figure 10 shows the throttleopening angle tracking performance It can be seen thatthe proposed controller can track the desired input signaleffectively Figures 11 12 and 13 show the manifold pressureengine speed and throttle airflow respectively The resultsshow that the proposed controller can control the engineaccurately via ETC
6 Conclusions
To improve the accuracy of the information for ETC underV2V communications an ESO based adaptive back-steppingSMC is proposed based on the Lyapunov theory in thepresence of high nonlinearity of ET and immeasurable signalsfor throttle opening angle change In addition with thedesigned adaptive law strong robustness to parametric uncer-tainties and external disturbance can be achieved Simulationresults show that the proposed controller can track thedesired reference input signal fast and accurately with strongrobustness to uncertainties and disturbances
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thiswork is jointly supported by theNationalNatural ScienceFoundation of China (Grant no 61304197) the Scientific and
Mathematical Problems in Engineering 9
Desiredinput
Mean valueModelling of spark
Ignition engines
Actual output
Manifold pressureEngine speedThrottle airflow
+
minus
Throttle Controller Throttle Model
Equation (51) Equation (8)
Figure 9 Schematic block diagram of main simulation
0 2 4 6 8 10Time (s)
0
10
20
30
40
50
60
70
Thro
ttle a
ngle
(deg
)
Desired inputActual output
Figure 10 Throttle opening angle
0 2 4 6 8 104
5
6
7
8
9
10
Man
ifold
pre
ssur
e (pa
)
Time (s)
times104
Figure 11 Manifold pressure
Technological Talents of Chongqing (Grant no cstc2014kjrc-qnrc30002) the Key Project of Application andDevelopmentof Chongqing (Grant no cstc2014yykfB40001) the NatureScience Funds of Education Committee of Chongqing (Grantno KJ130506) Natural Science Funds of Chongqing (Grantnos cstc2014jcyjA60003 and cstc2012jjA40035) and Natural
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Engi
ne sp
eed
(rpm
)
0 2 4 6 8 10Time (s)
Figure 12 Engine speed
Thro
ttle a
irflow
(gs
)
0 2 4 6 8 10Time (s)
minus15
minus10
minus5
0
5
10
15
20
25
Figure 13 Throttle airflow
Science Funds of CQUPT (Grant nos A2012-78 and A2013-27) The authors would like to express their gratitude toDr Hongchun Qu and Dr Xiaoming Tang from ChongqingUniversity of Posts and Telecommunications for their gooddiscussions on the paper preparation
References
[1] V Milanes S E Shladover J Spring C Nowakowski HKawazoe and M Nakamura ldquoCooperative adaptive cruise
10 Mathematical Problems in Engineering
control in real traffic situationsrdquo IEEETransactions on IntelligentTransportation Systems vol 15 no 1 pp 296ndash305 2014
[2] D-H Sun Y-F Li W-N Liu M Zhao and X-Y Liao ldquoResearch summary on transportation cyber physical systems andthe challenging technologiesrdquo China Journal of Highway andTransport vol 26 no 1 pp 144ndash154 2013
[3] L Li D Wen and D Yao ldquoA survey of traffic control withvehicular communicationsrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 425ndash432 2014
[4] Y FHuC Li J LiH YGuo P Y Sun andHChen ldquoObserver-based output feedback control of electronic throttlesrdquo ActaAutomatica Sinica vol 37 no 6 pp 746ndash754 2011
[5] P Ioannou and Z Xu ldquoThrottle and brake control system forautomatic vehicle followingrdquo Journal of Intelligent Transporta-tion Systems vol 1 no 4 pp 345ndash377 1994
[6] Y Li and D Sun ldquoMicroscopic car-following model for thetraffic flow the state of the artrdquo Journal of Control Theory andApplications vol 10 no 2 pp 133ndash143 2012
[7] T Tang W Shi H Shang and Y Wang ldquoA new car-followingmodel with consideration of inter-vehicle communicationrdquoNonlinear Dynamics vol 76 no 4 pp 2017ndash2023 2014
[8] J Ploeg N Van DeWouw and H Nijmeijer ldquoLp string stabilityof cascaded systems application to vehicle platooningrdquo IEEETransactions on Control Systems Technology vol 22 no 2 pp786ndash793 2014
[9] W Wang S S Liao X Li and J S Ren ldquoThe processof information propagation along a traffic stream throughintervehicle communicationrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 345ndash354 2014
[10] L Xiao and F Gao ldquoPractical string stability of platoon of adap-tive cruise control vehiclesrdquo IEEE Transactions on IntelligentTransportation Systems vol 12 no 4 pp 1184ndash1194 2011
[11] X F Yuan Y N Wang L H Wu X Z Zhang and WSun ldquoNeural network based self-learning control strategy forelectronic throttle valverdquo IEEE Transactions on Vehicular Tech-nology vol 59 no 8 pp 3757ndash3765 2010
[12] J Deur D Pavkovic N Peric M Jansz and D Hrovat ldquoAnelectronic throttle control strategy including compensation offriction and limp-home effectsrdquo IEEE Transactions on IndustryApplications vol 40 no 3 pp 821ndash834 2004
[13] D Pavkovic J DeurM Jansz andN Peric ldquoAdaptive control ofautomotive electronic throttlerdquo Control Engineering Practicevol 14 no 2 pp 121ndash136 2006
[14] X Yuan and Y Wang ldquoA novel electronic-throttle-valve con-troller based on approximate model methodrdquo IEEE Transac-tions on Industrial Electronics vol 56 no 3 pp 883ndash890 2009
[15] M Vasak M Baotic MMorari I Petrovic and N Peric ldquoCon-strained optimal control of an electronic throttlerdquo InternationalJournal of Control vol 79 no 5 pp 465ndash478 2006
[16] M Vasak M Baotic I Petrovic and N Peric ldquoHybrid theory-based time-optimal control of an electronic throttlerdquo IEEETransactions on Industrial Electronics vol 54 no 3 pp 1483ndash1494 2007
[17] D Kim H Peng S Bai and J M Maguire ldquoControl ofintegrated powertrain with electronic throttle and automatictransmissionrdquo IEEE Transactions on Control Systems Technol-ogy vol 15 no 3 pp 474ndash482 2007
[18] K Nakano U Sawut K Higuchi and Y Okajima ldquoModellingand observer-based sliding-mode control of electronic throttlesystemrdquo ECTI Transactions on Electrical Engineering Electron-ics and Communications vol 4 no 1 pp 22ndash28 2006
[19] M Horn and M Reichhartinger ldquoSecond-order sliding modecontrol of electronic throttle valvesrdquo in Proceedings of the IEEE10th International Workshop on Variable Structure Systems (VSSrsquo08) pp 280ndash284 IEEE Antalya Turkey June 2008
[20] Y D Pan U Ozguner and O H Dagci ldquoVariable-structurecontrol of electronic throttle valvesrdquo IEEE Transactions onIndustrial Electronics vol 55 no 11 pp 3899ndash3907 2008
[21] R Bai and S Tong ldquoAdaptive backstepping sliding-mode con-trol of the electronic throttle system in modern automobilesrdquoMathematical Problems in Engineering vol 2014 Article ID383064 8 pages 2014
[22] X Yuan Y Wang and L Wu ldquoSVM-based approximate modelcontrol for electronic throttle valverdquo IEEE Transactions onVehicular Technology vol 57 no 5 pp 2747ndash2756 2008
[23] M Baric I Petrovic and N Peric ldquoNeural network-basedsliding mode control of electronic throttlerdquo Engineering Appli-cations of Artificial Intelligence vol 18 no 8 pp 951ndash961 2005
[24] M Nentwig and P Mercorelli ldquoThrottle valve control using aninverse local linear model tree based on a Fuzzy neural net-workrdquo inProceedings of the 7th IEEE International Conference onCybernetic Intelligent Systems (CIS rsquo08) pp 1ndash6 London UKSeptember 2008
[25] M Baric I Petrovic and N Peric ldquoNeural network based slid-ingmode controller for a class of linear systemswith unmatcheduncertaintiesrdquo in Proceedings of the 41st IEEE Conference onDecision and Control vol 1 pp 967ndash972 Las Vegas Nev USADecember 2002
[26] W Sheng and Y Bao ldquoFruit fly optimization algorithm basedfractional order fuzzy-PID controller for electronic throttlerdquoNonlinear Dynamics vol 73 no 1-2 pp 611ndash619 2013
[27] C-H Wang and D-Y Huang ldquoA new intelligent fuzzy con-troller for nonlinear hysteretic electronic throttle in modernintelligent automobilesrdquo IEEE Transactions on Industrial Elec-tronics vol 60 no 6 pp 2332ndash2345 2013
[28] A K Yadav and P Gaur ldquoRobust adaptive speed control ofuncertain hybrid electric vehicle using electronic throttle con-trol with varying road graderdquo Nonlinear Dynamics vol 76 no1 pp 305ndash321 2014
[29] Z J Kang and X Y Chen ldquoA design method of nonlinearextension state observerrdquo Electric Machines and Control vol 5no 3 pp 199ndash203 2001
[30] A A Godbole J P Kolhe and S E Talole ldquoPerformanceanalysis of generalized extended state observer in tacklingsinusoidal disturbancesrdquo IEEE Transactions on Control SystemsTechnology vol 21 no 6 pp 2212ndash2223 2013
[31] Z Gao X Dai T Breikin and H Wang ldquoNovel parameteridentification by using a high-gain observer with applicationto a gas turbine enginerdquo IEEE Transactions on IndustrialInformatics vol 4 no 4 pp 271ndash279 2008
[32] M Morawiec ldquoThe adaptive backstepping control of perma-nent magnet synchronous motor supplied by current sourceinverterrdquo IEEE Transactions on Industrial Informatics vol 9 no2 pp 1047ndash1055 2013
[33] J R Dominguez A Navarrete M A Meza A G Loukianovand J Canedo ldquoDigital sliding-mode sensorless control forsurface-mounted PMSMrdquo IEEE Transactions on IndustrialInformatics vol 10 no 1 pp 137ndash151 2014
[34] D Zhao T Zou S Li and Q Zhu ldquoAdaptive backsteppingsliding mode control for leader-follower multi-agent systemsrdquoIET Control Theory amp Applications vol 6 no 8 pp 1109ndash11172012
Mathematical Problems in Engineering 11
[35] Y C Fang P C Wang N Sun and Y C Zhang ldquoDynamicsanalysis and nonlinear control of an offshore boom cranerdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 414ndash4272014
[36] Y Xia Z Zhu and M Fu ldquoBack-stepping sliding mode controlfor missile systems based on an extended state observerrdquo IETControl Theory amp Applications vol 5 no 1 pp 93ndash102 2011
[37] N Sun Y C Fang and H Chen ldquoA new antiswing controlmethod for underactuated cranes with unmodeled uncer-tainties theoretical design and hardware experimentsrdquo IEEETransactions on Industrial Electronics vol 62 no 1 pp 453ndash4652015
[38] X Zhang Y Fang andN Sun ldquoMinimum-time trajectory plan-ning for underactuated overhead crane systems with state andcontrol constraintsrdquo IEEETransactions on Industrial Electronicsvol 61 no 12 pp 6915ndash6925 2014
[39] E Hendricks and S C Sorenson ldquoMean value modelling ofspark ignition enginesrdquo SAE Technical Paper 900616 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
Desiredinput
Mean valueModelling of spark
Ignition engines
Actual output
Manifold pressureEngine speedThrottle airflow
+
minus
Throttle Controller Throttle Model
Equation (51) Equation (8)
Figure 9 Schematic block diagram of main simulation
0 2 4 6 8 10Time (s)
0
10
20
30
40
50
60
70
Thro
ttle a
ngle
(deg
)
Desired inputActual output
Figure 10 Throttle opening angle
0 2 4 6 8 104
5
6
7
8
9
10
Man
ifold
pre
ssur
e (pa
)
Time (s)
times104
Figure 11 Manifold pressure
Technological Talents of Chongqing (Grant no cstc2014kjrc-qnrc30002) the Key Project of Application andDevelopmentof Chongqing (Grant no cstc2014yykfB40001) the NatureScience Funds of Education Committee of Chongqing (Grantno KJ130506) Natural Science Funds of Chongqing (Grantnos cstc2014jcyjA60003 and cstc2012jjA40035) and Natural
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Engi
ne sp
eed
(rpm
)
0 2 4 6 8 10Time (s)
Figure 12 Engine speed
Thro
ttle a
irflow
(gs
)
0 2 4 6 8 10Time (s)
minus15
minus10
minus5
0
5
10
15
20
25
Figure 13 Throttle airflow
Science Funds of CQUPT (Grant nos A2012-78 and A2013-27) The authors would like to express their gratitude toDr Hongchun Qu and Dr Xiaoming Tang from ChongqingUniversity of Posts and Telecommunications for their gooddiscussions on the paper preparation
References
[1] V Milanes S E Shladover J Spring C Nowakowski HKawazoe and M Nakamura ldquoCooperative adaptive cruise
10 Mathematical Problems in Engineering
control in real traffic situationsrdquo IEEETransactions on IntelligentTransportation Systems vol 15 no 1 pp 296ndash305 2014
[2] D-H Sun Y-F Li W-N Liu M Zhao and X-Y Liao ldquoResearch summary on transportation cyber physical systems andthe challenging technologiesrdquo China Journal of Highway andTransport vol 26 no 1 pp 144ndash154 2013
[3] L Li D Wen and D Yao ldquoA survey of traffic control withvehicular communicationsrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 425ndash432 2014
[4] Y FHuC Li J LiH YGuo P Y Sun andHChen ldquoObserver-based output feedback control of electronic throttlesrdquo ActaAutomatica Sinica vol 37 no 6 pp 746ndash754 2011
[5] P Ioannou and Z Xu ldquoThrottle and brake control system forautomatic vehicle followingrdquo Journal of Intelligent Transporta-tion Systems vol 1 no 4 pp 345ndash377 1994
[6] Y Li and D Sun ldquoMicroscopic car-following model for thetraffic flow the state of the artrdquo Journal of Control Theory andApplications vol 10 no 2 pp 133ndash143 2012
[7] T Tang W Shi H Shang and Y Wang ldquoA new car-followingmodel with consideration of inter-vehicle communicationrdquoNonlinear Dynamics vol 76 no 4 pp 2017ndash2023 2014
[8] J Ploeg N Van DeWouw and H Nijmeijer ldquoLp string stabilityof cascaded systems application to vehicle platooningrdquo IEEETransactions on Control Systems Technology vol 22 no 2 pp786ndash793 2014
[9] W Wang S S Liao X Li and J S Ren ldquoThe processof information propagation along a traffic stream throughintervehicle communicationrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 345ndash354 2014
[10] L Xiao and F Gao ldquoPractical string stability of platoon of adap-tive cruise control vehiclesrdquo IEEE Transactions on IntelligentTransportation Systems vol 12 no 4 pp 1184ndash1194 2011
[11] X F Yuan Y N Wang L H Wu X Z Zhang and WSun ldquoNeural network based self-learning control strategy forelectronic throttle valverdquo IEEE Transactions on Vehicular Tech-nology vol 59 no 8 pp 3757ndash3765 2010
[12] J Deur D Pavkovic N Peric M Jansz and D Hrovat ldquoAnelectronic throttle control strategy including compensation offriction and limp-home effectsrdquo IEEE Transactions on IndustryApplications vol 40 no 3 pp 821ndash834 2004
[13] D Pavkovic J DeurM Jansz andN Peric ldquoAdaptive control ofautomotive electronic throttlerdquo Control Engineering Practicevol 14 no 2 pp 121ndash136 2006
[14] X Yuan and Y Wang ldquoA novel electronic-throttle-valve con-troller based on approximate model methodrdquo IEEE Transac-tions on Industrial Electronics vol 56 no 3 pp 883ndash890 2009
[15] M Vasak M Baotic MMorari I Petrovic and N Peric ldquoCon-strained optimal control of an electronic throttlerdquo InternationalJournal of Control vol 79 no 5 pp 465ndash478 2006
[16] M Vasak M Baotic I Petrovic and N Peric ldquoHybrid theory-based time-optimal control of an electronic throttlerdquo IEEETransactions on Industrial Electronics vol 54 no 3 pp 1483ndash1494 2007
[17] D Kim H Peng S Bai and J M Maguire ldquoControl ofintegrated powertrain with electronic throttle and automatictransmissionrdquo IEEE Transactions on Control Systems Technol-ogy vol 15 no 3 pp 474ndash482 2007
[18] K Nakano U Sawut K Higuchi and Y Okajima ldquoModellingand observer-based sliding-mode control of electronic throttlesystemrdquo ECTI Transactions on Electrical Engineering Electron-ics and Communications vol 4 no 1 pp 22ndash28 2006
[19] M Horn and M Reichhartinger ldquoSecond-order sliding modecontrol of electronic throttle valvesrdquo in Proceedings of the IEEE10th International Workshop on Variable Structure Systems (VSSrsquo08) pp 280ndash284 IEEE Antalya Turkey June 2008
[20] Y D Pan U Ozguner and O H Dagci ldquoVariable-structurecontrol of electronic throttle valvesrdquo IEEE Transactions onIndustrial Electronics vol 55 no 11 pp 3899ndash3907 2008
[21] R Bai and S Tong ldquoAdaptive backstepping sliding-mode con-trol of the electronic throttle system in modern automobilesrdquoMathematical Problems in Engineering vol 2014 Article ID383064 8 pages 2014
[22] X Yuan Y Wang and L Wu ldquoSVM-based approximate modelcontrol for electronic throttle valverdquo IEEE Transactions onVehicular Technology vol 57 no 5 pp 2747ndash2756 2008
[23] M Baric I Petrovic and N Peric ldquoNeural network-basedsliding mode control of electronic throttlerdquo Engineering Appli-cations of Artificial Intelligence vol 18 no 8 pp 951ndash961 2005
[24] M Nentwig and P Mercorelli ldquoThrottle valve control using aninverse local linear model tree based on a Fuzzy neural net-workrdquo inProceedings of the 7th IEEE International Conference onCybernetic Intelligent Systems (CIS rsquo08) pp 1ndash6 London UKSeptember 2008
[25] M Baric I Petrovic and N Peric ldquoNeural network based slid-ingmode controller for a class of linear systemswith unmatcheduncertaintiesrdquo in Proceedings of the 41st IEEE Conference onDecision and Control vol 1 pp 967ndash972 Las Vegas Nev USADecember 2002
[26] W Sheng and Y Bao ldquoFruit fly optimization algorithm basedfractional order fuzzy-PID controller for electronic throttlerdquoNonlinear Dynamics vol 73 no 1-2 pp 611ndash619 2013
[27] C-H Wang and D-Y Huang ldquoA new intelligent fuzzy con-troller for nonlinear hysteretic electronic throttle in modernintelligent automobilesrdquo IEEE Transactions on Industrial Elec-tronics vol 60 no 6 pp 2332ndash2345 2013
[28] A K Yadav and P Gaur ldquoRobust adaptive speed control ofuncertain hybrid electric vehicle using electronic throttle con-trol with varying road graderdquo Nonlinear Dynamics vol 76 no1 pp 305ndash321 2014
[29] Z J Kang and X Y Chen ldquoA design method of nonlinearextension state observerrdquo Electric Machines and Control vol 5no 3 pp 199ndash203 2001
[30] A A Godbole J P Kolhe and S E Talole ldquoPerformanceanalysis of generalized extended state observer in tacklingsinusoidal disturbancesrdquo IEEE Transactions on Control SystemsTechnology vol 21 no 6 pp 2212ndash2223 2013
[31] Z Gao X Dai T Breikin and H Wang ldquoNovel parameteridentification by using a high-gain observer with applicationto a gas turbine enginerdquo IEEE Transactions on IndustrialInformatics vol 4 no 4 pp 271ndash279 2008
[32] M Morawiec ldquoThe adaptive backstepping control of perma-nent magnet synchronous motor supplied by current sourceinverterrdquo IEEE Transactions on Industrial Informatics vol 9 no2 pp 1047ndash1055 2013
[33] J R Dominguez A Navarrete M A Meza A G Loukianovand J Canedo ldquoDigital sliding-mode sensorless control forsurface-mounted PMSMrdquo IEEE Transactions on IndustrialInformatics vol 10 no 1 pp 137ndash151 2014
[34] D Zhao T Zou S Li and Q Zhu ldquoAdaptive backsteppingsliding mode control for leader-follower multi-agent systemsrdquoIET Control Theory amp Applications vol 6 no 8 pp 1109ndash11172012
Mathematical Problems in Engineering 11
[35] Y C Fang P C Wang N Sun and Y C Zhang ldquoDynamicsanalysis and nonlinear control of an offshore boom cranerdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 414ndash4272014
[36] Y Xia Z Zhu and M Fu ldquoBack-stepping sliding mode controlfor missile systems based on an extended state observerrdquo IETControl Theory amp Applications vol 5 no 1 pp 93ndash102 2011
[37] N Sun Y C Fang and H Chen ldquoA new antiswing controlmethod for underactuated cranes with unmodeled uncer-tainties theoretical design and hardware experimentsrdquo IEEETransactions on Industrial Electronics vol 62 no 1 pp 453ndash4652015
[38] X Zhang Y Fang andN Sun ldquoMinimum-time trajectory plan-ning for underactuated overhead crane systems with state andcontrol constraintsrdquo IEEETransactions on Industrial Electronicsvol 61 no 12 pp 6915ndash6925 2014
[39] E Hendricks and S C Sorenson ldquoMean value modelling ofspark ignition enginesrdquo SAE Technical Paper 900616 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
control in real traffic situationsrdquo IEEETransactions on IntelligentTransportation Systems vol 15 no 1 pp 296ndash305 2014
[2] D-H Sun Y-F Li W-N Liu M Zhao and X-Y Liao ldquoResearch summary on transportation cyber physical systems andthe challenging technologiesrdquo China Journal of Highway andTransport vol 26 no 1 pp 144ndash154 2013
[3] L Li D Wen and D Yao ldquoA survey of traffic control withvehicular communicationsrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 425ndash432 2014
[4] Y FHuC Li J LiH YGuo P Y Sun andHChen ldquoObserver-based output feedback control of electronic throttlesrdquo ActaAutomatica Sinica vol 37 no 6 pp 746ndash754 2011
[5] P Ioannou and Z Xu ldquoThrottle and brake control system forautomatic vehicle followingrdquo Journal of Intelligent Transporta-tion Systems vol 1 no 4 pp 345ndash377 1994
[6] Y Li and D Sun ldquoMicroscopic car-following model for thetraffic flow the state of the artrdquo Journal of Control Theory andApplications vol 10 no 2 pp 133ndash143 2012
[7] T Tang W Shi H Shang and Y Wang ldquoA new car-followingmodel with consideration of inter-vehicle communicationrdquoNonlinear Dynamics vol 76 no 4 pp 2017ndash2023 2014
[8] J Ploeg N Van DeWouw and H Nijmeijer ldquoLp string stabilityof cascaded systems application to vehicle platooningrdquo IEEETransactions on Control Systems Technology vol 22 no 2 pp786ndash793 2014
[9] W Wang S S Liao X Li and J S Ren ldquoThe processof information propagation along a traffic stream throughintervehicle communicationrdquo IEEE Transactions on IntelligentTransportation Systems vol 15 no 1 pp 345ndash354 2014
[10] L Xiao and F Gao ldquoPractical string stability of platoon of adap-tive cruise control vehiclesrdquo IEEE Transactions on IntelligentTransportation Systems vol 12 no 4 pp 1184ndash1194 2011
[11] X F Yuan Y N Wang L H Wu X Z Zhang and WSun ldquoNeural network based self-learning control strategy forelectronic throttle valverdquo IEEE Transactions on Vehicular Tech-nology vol 59 no 8 pp 3757ndash3765 2010
[12] J Deur D Pavkovic N Peric M Jansz and D Hrovat ldquoAnelectronic throttle control strategy including compensation offriction and limp-home effectsrdquo IEEE Transactions on IndustryApplications vol 40 no 3 pp 821ndash834 2004
[13] D Pavkovic J DeurM Jansz andN Peric ldquoAdaptive control ofautomotive electronic throttlerdquo Control Engineering Practicevol 14 no 2 pp 121ndash136 2006
[14] X Yuan and Y Wang ldquoA novel electronic-throttle-valve con-troller based on approximate model methodrdquo IEEE Transac-tions on Industrial Electronics vol 56 no 3 pp 883ndash890 2009
[15] M Vasak M Baotic MMorari I Petrovic and N Peric ldquoCon-strained optimal control of an electronic throttlerdquo InternationalJournal of Control vol 79 no 5 pp 465ndash478 2006
[16] M Vasak M Baotic I Petrovic and N Peric ldquoHybrid theory-based time-optimal control of an electronic throttlerdquo IEEETransactions on Industrial Electronics vol 54 no 3 pp 1483ndash1494 2007
[17] D Kim H Peng S Bai and J M Maguire ldquoControl ofintegrated powertrain with electronic throttle and automatictransmissionrdquo IEEE Transactions on Control Systems Technol-ogy vol 15 no 3 pp 474ndash482 2007
[18] K Nakano U Sawut K Higuchi and Y Okajima ldquoModellingand observer-based sliding-mode control of electronic throttlesystemrdquo ECTI Transactions on Electrical Engineering Electron-ics and Communications vol 4 no 1 pp 22ndash28 2006
[19] M Horn and M Reichhartinger ldquoSecond-order sliding modecontrol of electronic throttle valvesrdquo in Proceedings of the IEEE10th International Workshop on Variable Structure Systems (VSSrsquo08) pp 280ndash284 IEEE Antalya Turkey June 2008
[20] Y D Pan U Ozguner and O H Dagci ldquoVariable-structurecontrol of electronic throttle valvesrdquo IEEE Transactions onIndustrial Electronics vol 55 no 11 pp 3899ndash3907 2008
[21] R Bai and S Tong ldquoAdaptive backstepping sliding-mode con-trol of the electronic throttle system in modern automobilesrdquoMathematical Problems in Engineering vol 2014 Article ID383064 8 pages 2014
[22] X Yuan Y Wang and L Wu ldquoSVM-based approximate modelcontrol for electronic throttle valverdquo IEEE Transactions onVehicular Technology vol 57 no 5 pp 2747ndash2756 2008
[23] M Baric I Petrovic and N Peric ldquoNeural network-basedsliding mode control of electronic throttlerdquo Engineering Appli-cations of Artificial Intelligence vol 18 no 8 pp 951ndash961 2005
[24] M Nentwig and P Mercorelli ldquoThrottle valve control using aninverse local linear model tree based on a Fuzzy neural net-workrdquo inProceedings of the 7th IEEE International Conference onCybernetic Intelligent Systems (CIS rsquo08) pp 1ndash6 London UKSeptember 2008
[25] M Baric I Petrovic and N Peric ldquoNeural network based slid-ingmode controller for a class of linear systemswith unmatcheduncertaintiesrdquo in Proceedings of the 41st IEEE Conference onDecision and Control vol 1 pp 967ndash972 Las Vegas Nev USADecember 2002
[26] W Sheng and Y Bao ldquoFruit fly optimization algorithm basedfractional order fuzzy-PID controller for electronic throttlerdquoNonlinear Dynamics vol 73 no 1-2 pp 611ndash619 2013
[27] C-H Wang and D-Y Huang ldquoA new intelligent fuzzy con-troller for nonlinear hysteretic electronic throttle in modernintelligent automobilesrdquo IEEE Transactions on Industrial Elec-tronics vol 60 no 6 pp 2332ndash2345 2013
[28] A K Yadav and P Gaur ldquoRobust adaptive speed control ofuncertain hybrid electric vehicle using electronic throttle con-trol with varying road graderdquo Nonlinear Dynamics vol 76 no1 pp 305ndash321 2014
[29] Z J Kang and X Y Chen ldquoA design method of nonlinearextension state observerrdquo Electric Machines and Control vol 5no 3 pp 199ndash203 2001
[30] A A Godbole J P Kolhe and S E Talole ldquoPerformanceanalysis of generalized extended state observer in tacklingsinusoidal disturbancesrdquo IEEE Transactions on Control SystemsTechnology vol 21 no 6 pp 2212ndash2223 2013
[31] Z Gao X Dai T Breikin and H Wang ldquoNovel parameteridentification by using a high-gain observer with applicationto a gas turbine enginerdquo IEEE Transactions on IndustrialInformatics vol 4 no 4 pp 271ndash279 2008
[32] M Morawiec ldquoThe adaptive backstepping control of perma-nent magnet synchronous motor supplied by current sourceinverterrdquo IEEE Transactions on Industrial Informatics vol 9 no2 pp 1047ndash1055 2013
[33] J R Dominguez A Navarrete M A Meza A G Loukianovand J Canedo ldquoDigital sliding-mode sensorless control forsurface-mounted PMSMrdquo IEEE Transactions on IndustrialInformatics vol 10 no 1 pp 137ndash151 2014
[34] D Zhao T Zou S Li and Q Zhu ldquoAdaptive backsteppingsliding mode control for leader-follower multi-agent systemsrdquoIET Control Theory amp Applications vol 6 no 8 pp 1109ndash11172012
Mathematical Problems in Engineering 11
[35] Y C Fang P C Wang N Sun and Y C Zhang ldquoDynamicsanalysis and nonlinear control of an offshore boom cranerdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 414ndash4272014
[36] Y Xia Z Zhu and M Fu ldquoBack-stepping sliding mode controlfor missile systems based on an extended state observerrdquo IETControl Theory amp Applications vol 5 no 1 pp 93ndash102 2011
[37] N Sun Y C Fang and H Chen ldquoA new antiswing controlmethod for underactuated cranes with unmodeled uncer-tainties theoretical design and hardware experimentsrdquo IEEETransactions on Industrial Electronics vol 62 no 1 pp 453ndash4652015
[38] X Zhang Y Fang andN Sun ldquoMinimum-time trajectory plan-ning for underactuated overhead crane systems with state andcontrol constraintsrdquo IEEETransactions on Industrial Electronicsvol 61 no 12 pp 6915ndash6925 2014
[39] E Hendricks and S C Sorenson ldquoMean value modelling ofspark ignition enginesrdquo SAE Technical Paper 900616 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
[35] Y C Fang P C Wang N Sun and Y C Zhang ldquoDynamicsanalysis and nonlinear control of an offshore boom cranerdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 414ndash4272014
[36] Y Xia Z Zhu and M Fu ldquoBack-stepping sliding mode controlfor missile systems based on an extended state observerrdquo IETControl Theory amp Applications vol 5 no 1 pp 93ndash102 2011
[37] N Sun Y C Fang and H Chen ldquoA new antiswing controlmethod for underactuated cranes with unmodeled uncer-tainties theoretical design and hardware experimentsrdquo IEEETransactions on Industrial Electronics vol 62 no 1 pp 453ndash4652015
[38] X Zhang Y Fang andN Sun ldquoMinimum-time trajectory plan-ning for underactuated overhead crane systems with state andcontrol constraintsrdquo IEEETransactions on Industrial Electronicsvol 61 no 12 pp 6915ndash6925 2014
[39] E Hendricks and S C Sorenson ldquoMean value modelling ofspark ignition enginesrdquo SAE Technical Paper 900616 1990
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of




![Speed Sensoless Robust Control of Permanent Magnet ......frequency injection method [18, 19], observer based approach such as Extended Kalman Filter [20], nonlinear observer [21 –](https://img.pdfslide.net/doc/110x75/60f7af01e4999636a86ab8e4/speed-sensoless-robust-control-of-permanent-magnet-frequency-injection-method.jpg)

![Observer Based Current Estimation for Coupled Neurons · observer design [19, 23]. Starting with linear time-invariant systems, this work has been extended into several directions](https://img.pdfslide.net/doc/110x75/5f0df9a27e708231d43d00fc/observer-based-current-estimation-for-coupled-observer-design-19-23-starting.jpg)