Embed Size (px)
Citation preview

Research ArticleModified Cross Feedback Control for a Magnetically SuspendedFlywheel Rotor with Significant Gyroscopic Effects
Yuan Ren1,2 and Jiancheng Fang2
1 Department of Space Equipment, Equipment Academy, Beijing 101416, China2 School of Instrumentation Science & Opto-Electronics Engineering, Beihang University, Beijing 100191, China
Correspondence should be addressed to Yuan Ren; renyuan [email protected]
Received 25 July 2013; Revised 12 November 2013; Accepted 26 November 2013; Published 14 January 2014
Academic Editor: Xinkai Chen
Copyright © 2014 Y. Ren and J. Fang. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
For magnetically suspended rigid rotors (MSRs) with significant gyroscopic effects, phase lag of the control channel is the mainfactor influencing the system nutation stability and decoupling performance. At first, this paper proves that the phase lag of thecross channel instead of the decentralized channel is often the main factor influencing the system nutation stability at high speeds.Then a modified cross feedback control strategy based on the phase compensation of cross channel is proposed to improve thestability and decoupling performances. The common issues associated with the traditional control methods have been successfullyresolved by this method. Analysis, simulation, and experimental results are presented to demonstrate the feasibility and superiorityof the proposed control method.
1. Introduction
High speed flywheel systems are being widely employed inpower industry, aerospace, transportation, military applica-tions, and so on, which show promise as an alternative toenergy storage and attitude control for spacecraft, such asstorage energy flywheels, reaction wheels, and momentumflywheels in control moment gyroscopes [1–3]. With theadvance of high performance magnetic bearings, a magnet-ically suspended flywheel (MSFW) is becoming an excitingalternative to the traditional mechanical flywheel due to itsinherent superior features such as contact-free operation,small noise, and adjustable damping and stiffness as wellas the potential for low vibration and super high rotationalspeeds [4–7].
To maximize the energy storage capacity, the magnet-ically suspended rotor (MSR) is often designed as a plotstructure [8]. In this case, the gyroscopic effects are especiallysignificant, which puts a challenging issue on the high-stability and high-precision control of the system. Recentlythe demand for higher power density and efficiency has ledto more significant gyroscopic effects and higher operatingspeed, making the stability control more difficult [9, 10].
Over the years, considerable research has been conductedto resolve the gyroscopic effects, and various approaches havebeen proposed. Ahrens et al. [11] proposed decentralized PIDplus speed cross feedback control approach to attain this goal.Although this method is relatively simple to implement, itinevitably introduces noise amplification due to derivativeoperation. Brown et al. [12] further presented the filteredcross-axis proportional gains method, which not only cangreatly improve the stability of the gyroscopic modes, butalso can effectively avoid excessive noise enhancement causedby the cross feedback arithmetic. Unfortunately, this methodis relatively complex due to multicoordinate transformation.In addition, to realize the separate control of the stiffnessand damping of the rotor’s rigid modes, Dever et al. [13]proposed a modal controller. However, this method cannotrealize the decoupling between the rotation modes of theMSR. Accordingly, it cannot reject radically the gyroscopiceffects. To realize the high-precision control of a magneti-cally suspended control moment gyro (MSCMG), Fang andRen [6] proposed a channel decoupling strategy based oncurrent-mode inverse system method and phase compensa-tion filters. This method can realize the decoupling controlamong the four radial channels of the MSR. Nevertheless,
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014, Article ID 325913, 11 pageshttp://dx.doi.org/10.1155/2014/325913

2 Mathematical Problems in Engineering
this decoupling algorithm is not away from complexitybecause of complex inversion arithmetic and the combinedrobust controllers. To overcome the shortcomings of thechannel decoupling method, the modal decoupling controlbased on modified modal separation and rotation motionsdecoupling strategy has been further proposed [17]. Althoughthe robustness and simplicity have been improved greatly,it is relatively complex compared with the traditional crossfeedback control.
All in all, the common issues of the existing methodsmainly lie in the contradictions among the high decouplingprecision, high stability, and simplicity.
Moreover, all the methods above have some difficultyin achieving satisfactory control performances at high rotorspeeds due to phase lag of the control system, which evenendangers the whirling mode stability [14]. There are threemain factors which introduce phase lag into the controlsystem. The first one is all kinds of low-pass filters, suchas digital or analog antialias filters employed to cut off thefrequency components above the band of interest.The secondone is the switching power amplifiers delay since themagneticbearings are typical inductive loads. The third one is thedigital control delay. Among these, the switching poweramplifier delay is the dominating factor as for a high speedMSR system.
Therefore, to improve the system nutation stability andcontrol performances, it is necessary to develop phase com-pensation for the control system. In early work [6, 8, 9], high-pass filters to compensate for the unmodeled dynamic ofthe system have been employed to improve the decouplingperformance of the current-mode inverse system method.However, this method inevitably causes large computationresources and noise amplification. Ren and Fang [15] pro-posed a phase compensation method based on unsymmetri-cal sampling resistance networks to decrease the systemphaselag resulted by the coil inductance and digital control delayfor a magnetic bearing switching power amplifier. Althoughthis method does not induce extra computation resources,it also results in noise amplification since all the couplingchannels need to perform phase compensation. Concretelyspeaking, when these methods are employed in a 5-degree-of-freedom (DOF) MSR, they need to compensate for thefour radial channels, that is, four coupling channels. For thesake of the convenience, the phase compensation methodsmentioned above are collectively called the coupling channelcompensation method in this paper.
In this paper, the solution is oriented to resolve thecommon issues above. Based on the decentralized PID pluscross feedback control, a modified cross feedback controlstrategy is proposed to improve the system nutation stabilityand decoupling precision without extra computation effortand system noise. The main contribution of this paper liesin that the common contradictions of the existing controlmethods for a MSR can be successfully resolved with theproposed method.
The remainder of this paper is organized as follows.First, in Section 2, the system is modeled and its phase lagcharacteristics are analyzed. Then, the proof is developedand the modified cross feedback control strategy based
AY, fay
A
AX, fax
ZΩ
Y, fy, py
𝛽
O
𝛼
X, fx, px
lmBY, fby
B
BX, fbx
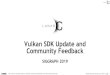
Figure 1: Rotor forces and the coordinate systems.
on phase compensation of cross channel is proposed inSection 3. Comparative simulation and experiments betweenthe modified method and the traditional one (couplingchannel compensation method) are developed in Section 4.Finally, Section 5 concludes this paper.
2. Modeling of the Whole ControlSystem for MSR
2.1. Dynamic Modeling of the Cross Feedback Controller.Here we review the model of a MSR, which has been wellestablished [6]. A schematic of the rotor forces and thecoordinate systems is shown in Figure 1, where 𝑂 is thegeometric center of the magnetic bearing stator; x-, y-, andz-axes form the generalized coordinate system of the rotorposition; 𝛼 and 𝛽 are the rotor angular displacements aboutthe x- and y-axes.𝑓
𝑎𝑥,𝑓𝑎𝑦,𝑓𝑏𝑥, and𝑓
𝑏𝑦are themagnetic forces
along themagnetic bearing coordinate systemAX-,AY-, BX-,and BY-axes; 𝑓
𝑥and 𝑓
𝑦are the magnetic forces in the x- and
y-axes, respectively; 𝑝𝑥and 𝑝
𝑦are the torques in the x- and y-
directions;Ω is the rotor speed of the MSR; 𝑙𝑚is the distance
from 𝑂 to the center of the radial magnetic bearing.According to Newton’s second law and the principle
of rotor dynamics, the dynamic model of the rigid rotorsupported by magnetic bearings can be described as
𝑚�� = 𝑓𝑎𝑥+ 𝑓𝑏𝑥,
𝐽𝑦
𝛽 − 𝐽𝑧Ω�� = 𝑝
𝑦= 𝑙𝑚(𝑓𝑎𝑥− 𝑓𝑏𝑥) ,
𝑚 𝑦 = 𝑓𝑎𝑦+ 𝑓𝑏𝑦,
𝐽𝑥�� + 𝐽𝑧Ω 𝛽 = 𝑝
𝑥= 𝑙𝑚(𝑓𝑏𝑦− 𝑓𝑎𝑦) ,
(1)
where 𝐽𝑥, 𝐽𝑦and 𝐽𝑧are the moments of inertia of the rotor
about the x-, y-, and z-axes, respectively;𝑥 and𝑦 are the lineardisplacements of the mass center of the rotor from 𝑂 in thex- and y-axes.
Figure 2 shows the schematic of the cross feedbackcontroller, where 𝑔
𝑑(𝑠) and 𝑔cr(𝑠) are the transfer functions
of the basic controller (such as a PID controller) and thecross feedback controller; 𝑔
𝑓(𝑠) is the transfer function of the
filters, including the antialias filter and notch filter; 𝑔𝜏(𝑠) is
the delay unit of the control channel; 𝑔𝜏(𝑠) = 𝑒
−𝜏𝑠, 𝑘𝑐and
𝑘ℎdenote, respectively, the force-current factor and force-
displacement factor of the radial magnetic bearings; 𝑘𝑠is the
proportional coefficient of the current sensor.

Mathematical Problems in Engineering 3
𝛽r
−
𝛼r
−
−
gf(s)
gf(s)
gd(s)
gd(s)
gcr (s)
gcr (s)
Cross feedbackcontroller
+g𝜏(s) ga(s)
g𝜏(s) ga(s)
2lmlskiks
2lmlskiks
2l2mkh
2l2mkh
+
+
+
−
1
Jr
1
Jr
1
s
1
s
1
s
1
s
JzΩ
JzΩ
Cross couplingcontrolled plant
𝛽
𝛼
Figure 2: Schematic diagram of decentralized control plus cross feedback.
Combing the dynamic equation of the MSR, the rota-tional modes of the closed-loop MSR system based on crossfeedback controller can be described as follows:
𝐽𝑦
𝛽 (𝑡) − 𝐻�� (𝑡) − 2𝑘ℎ𝑙2
𝑚𝛽 (𝑡)
= −2𝑙𝑚𝑙𝑠𝑘𝑐𝑘𝑠𝑔𝑎𝑔𝜏𝑔𝑓[𝑔𝑑𝛽 (𝑡) + 2𝑔cr𝛼 (𝑡)] ,
𝐽𝑥�� (𝑡) + 𝐻 𝛽 (𝑡) − 2𝑘
ℎ𝑙2
𝑚𝛼 (𝑡)
= −2𝑙𝑚𝑙𝑠𝑘𝑐𝑘𝑠𝑔𝑎𝑔𝜏𝑔𝑓[𝑔𝑑𝛼 (𝑡) − 2𝑔cr𝛽 (𝑡)] ,
(2)
where 𝑔𝑎(𝑠) and 𝑔
𝑓(𝑠) denote the power amplifier and the
antialias filter, respectively, 𝑙𝑠is the distance from 𝑂 to the
center of the radial displacement sensor, and𝐻 = 𝐽𝑧Ω.
2.2. Characteristic Analysis of Phase Lag of the Control System.According to the coordinate system definition shown inFigure 1, the rotating direction of the rotor speed is from𝑥-axis to 𝑦-axis. Note that 𝛼 and 𝛽 are the rotor angulardisplacements about the x- and y-axes, respectively, and 𝑋-axis and 𝑌-axis are upright. Accordingly, 𝛼 leads 𝛽 by 90degrees. Define 𝜑 = 𝛼 + 𝑗𝛽, where 𝑗 is the imaginary numberunit and 𝑗2 = −1. As for the symmetrical magnetic bearing,𝐽𝑥= 𝐽𝑦. Note that the antisymmetry of (2), multiplying the
first equation by 𝑗 and then adding the result to the secondone yields,
𝐽𝑟�� (𝑡) − 𝑗𝐻�� (𝑡) − 2𝑘
ℎ𝑙2
𝑚𝜑 (𝑡)
= −2𝑙𝑚𝑙𝑠𝑘𝑐𝑔𝑎𝑔𝜏𝑔𝑓(𝑔𝑑+ 𝑗2𝑔cr) 𝜑 (𝑡) ,
(3)
where 𝐽𝑟= 𝐽𝑥= 𝐽𝑦.
The above equation is the differential equation of therotation modes with the decentralized control plus crossfeedback. Its Laplace conversion can be resolved as
𝐽𝑟𝑠2
− 𝑗𝐻𝑠 − 2𝑘ℎ𝑙2
𝑚
= −2𝑙𝑚𝑙𝑠𝑘𝑐𝑘𝑠𝑔𝑎(𝑠) 𝑔𝑓(𝑠) (𝑔𝑑(𝑠) + 𝑗2𝑔cr (𝑠)) 𝑒
−𝜏𝑠
.
(4)
Then the original systems described as (4) can be equiv-alent to a feedback control system. Its equivalent controlled
plant and equivalent transfer function of the control channelcan be described, respectively, as
𝐻(𝑠) =2𝑙𝑚𝑙𝑠𝑘𝑐𝑘𝑠
𝐽𝑟𝑠2 − 𝑗𝐻𝑠 − 2𝑘
ℎ𝑙2𝑚
, (5)
𝐺 (𝑠) = 𝑔𝑎(𝑠) 𝑔𝑓(𝑠) [𝑔𝑑(𝑠) + 𝑗2𝑔cr (𝑠)] 𝑒
−𝜏𝑠
. (6)
Accordingly, the system open-loop translation functioncan be described as
𝐺 (𝑠)𝐻 (𝑠) =2𝑙𝑚𝑙𝑠𝑘𝑐𝑘𝑠𝑔𝑎(𝑠) 𝑔𝑓(𝑠) [𝑔𝑑(𝑠) + 𝑗2𝑔cr (𝑠)] 𝑒
−𝜏𝑠
𝐽𝑟𝑠2 − 𝑗𝐻𝑠 − 2𝑘
ℎ𝑙2𝑚
.
(7)
From (7), it can be found that, as for the high-frequencyphase lag, there are four phase lag units in the whole opentranslation function, including switching power amplifier𝑔𝑎(𝑠), antialias filter 𝑔
𝑓(𝑠), digital control delay 𝑒−𝜏𝑠, and the
controlled objective delay. As for the phase lag at the lowfrequencies, the integral operation of the decentralized PIDcontroller is the main factor.
According to the gyroscopic theory, the nutation fre-quency increases with the rotor speed. Contrarily, the pre-cession frequency decreases with the rotor speed. Therefore,the high frequency phase lag is the key factor of the nutationinstability of the MSR, and the low frequency phase lag is thecause of the precession instability.
Notice that the phase lag in low frequencies is limited andthe low-pass filter of the filtered cross feedback control caneffectively realize phase compensation; therefore, the preces-sion stability of the MSR is relatively easy to be guaranteed.Contrarily, as for the phase lag at high frequencies, the largerthe frequency is, the larger the phase lag is. Simultaneously,as for the same frequency, the larger the digital control delayis, the larger the phase lag is. Accordingly, compared withthe precession instability, the nutation instability is a morechallenging issue. Therefore, it is very necessary to develophigh frequency phase compensation of the MSR.
3. Modified Cross Feedback Control
3.1. Strategy of the ProposedController. As for theMSR systemwith high speed, there are four possible phase compensation

4 Mathematical Problems in Engineering
strategies according to (7). The first one is to compensate forthe whole decentralized PID control channel.The second oneis to compensate for the derivative item of the PID controller.The third one is to compensate for both the decentralizedcontrol channels and the cross feedback channels, whichis the traditional compensation strategy. All of the threemethods need four phase compensation filters since there arefour coupling channels. The last one is to compensate for thecross feedback channels only, which needs only two phasecompensation filters.
Define 𝜑(𝜔) as the phase synthesis of the whole controlchannel; that is, 𝜑(𝜔) = ∠𝐺(𝑗𝜔), and 𝜃(𝜔) is the lag phaseof the control channel without the controller; namely, 𝜃(𝜔) =−(∠𝑔𝑎(𝑗𝜔)+∠𝑔
𝑓(𝑗𝜔)+∠𝑒
−𝜏𝑗𝜔
).Therefore, 𝜃(𝜔) increases with𝜔. As for the existing decentralized PID plus cross feedbackcontrol, note that the decentralized control channel and thecross feedback channel are of parallel connection; therefore,their phase lags are the same. For ease of presentation, 𝜃
1(𝜔)
and 𝜃2(𝜔) are employed to describe them, respectively; then
we have 𝜃1(𝜔) = 𝜃
2(𝜔) = 𝜃(𝜔).
According to the nutation stability criterion of the MSR[16], the sufficient and necessary condition of the nutationstability is that the phase of the control channel is within therange of 0 to 180 degrees. Note that the maximum leadingphases of the cross feedback controller, 𝑗2𝑔cr(𝑠), and the basicPID controller,𝑔
𝑑(𝑠), are within the range of 90 to 180 degrees
and 0 to 90 degrees, respectively. Therefore when the phasesynthesis of the whole control channel, 𝐺(𝑠), is zero degree,𝜋/2 < 𝜃(𝜔) < 𝜋. According to the principle of the crossfeedback control, the cross feedback control is designed tocounteract the gyroscopic effects; therefore, the effect of thecross item can be equivalent to𝐻𝜔𝑒𝑗(180
∘
−𝜃(𝜔)) theoretically.Accordingly, under the condition 𝜋/2 < 𝜃(𝜔) < 𝜋, the
phase synthesis of the decentralized PID plus cross feedbackcontroller can be described as
𝜑 (𝜔)
= arctan((𝐾𝑑𝜔 cos 𝜃
1(𝜔) − 𝐾
𝑝sin 𝜃1(𝜔)
−𝐾𝑖
𝜔cos 𝜃1(𝜔) + 𝐻𝜔 sin 𝜃
2(𝜔))
× (𝐾𝑝cos 𝜃1(𝜔) + 𝐾
𝑑𝜔 sin 𝜃
1(𝜔)
−𝐾𝑖
𝜔sin 𝜃1(𝜔) − 𝐻𝜔 cos 𝜃
2(𝜔))
−1
) ,
(8)
where 𝐾𝑝
= 2𝑙𝑚𝑙𝑠𝑘𝑐𝑘𝑠𝑘𝑝, 𝐾𝑖= 2𝑙𝑚𝑙𝑠𝑘𝑐𝑘𝑠𝑘𝑖, and 𝐾
𝑑=
2𝑙𝑚𝑙𝑠𝑘𝑐𝑘𝑠𝑘𝑑, where 𝑘
𝑝, 𝑘𝑖, and 𝑘
𝑑are the proportional,
integral, and differential coefficients of the decentralized PIDcontroller.
Note that the critical nutation frequency is high fre-quency; the phase effect of the integral is small enoughto be ignored compared with that of the proportional and
differential as well as the cross feedback control. Accordingly,(8) can be simplified as
𝜑 (𝜔)
≈ arctan𝐾𝑑𝜔 cos 𝜃
1(𝜔) − 𝐾
𝑝sin 𝜃1(𝜔) + 𝐻𝜔 sin 𝜃
2(𝜔)
𝐾𝑝cos 𝜃1(𝜔) + 𝐾
𝑑𝜔 sin 𝜃
1(𝜔) − 𝐻𝜔 cos 𝜃
2(𝜔)
.
(9)
Then
𝜕𝜑 (𝜔)
𝜕𝜃2(𝜔)
≈1
1 + 𝜉2
𝐻𝜔 cos 𝜃2(𝜔) 𝛾 − 𝐻𝜔 sin 𝜃
2(𝜔) 𝜅
𝛾2,
𝜕𝜑 (𝜔)
𝜕𝜃1(𝜔)
≈1
1 + 𝜉2( ((−𝐾
𝑑𝜔 sin 𝜃
1(𝜔) − 𝐾
𝑝cos 𝜃1(𝜔)) 𝛾
− (−𝐾𝑝sin 𝜃1(𝜔) + 𝐾
𝑑𝜔 cos 𝜃
1(𝜔)) 𝜅)
×(𝛾2
)−1
) ,
(10)
where
𝛾 = 𝐾𝑝cos 𝜃1(𝜔) + 𝐾
𝑑𝜔 sin 𝜃
1(𝜔) − 𝐻𝜔 cos 𝜃
2(𝜔) ,
𝜅 = 𝐾𝑑𝜔 cos 𝜃
1(𝜔) − 𝐾
𝑝sin 𝜃1(𝜔) + 𝐻𝜔 sin 𝜃
2(𝜔) ,
𝜉 =𝐾𝑑𝜔 cos 𝜃
1(𝜔) − 𝐾
𝑝sin 𝜃1(𝜔) + 𝐻𝜔 sin 𝜃
2(𝜔)
𝐾𝑝cos 𝜃1(𝜔) + 𝐾
𝑑𝜔 sin 𝜃
1(𝜔) − 𝐻𝜔 cos 𝜃
2(𝜔)
.
(11)
Therefore, lim𝜑→0
−(𝜅/𝛾) = 0.Accordingly,
lim𝜑(𝜔)→0
−
𝜕𝜑 (𝜔) /𝜕𝜃2(𝜔)
𝜕𝜑 (𝜔) /𝜕𝜃1(𝜔)
≈𝐻𝜔 cos 𝜃
2(𝜔)
−𝐾𝑑𝜔 sin 𝜃
1(𝜔) − 𝐾
𝑝cos 𝜃1(𝜔)
.
(12)
Let 𝜑(𝜔) = 0; we have
𝐾𝑑𝜔 cos 𝜃
1(𝜔) − 𝐾
𝑝sin 𝜃1(𝜔) + 𝐻𝜔 sin 𝜃
1(𝜔) = 0. (13)
Note that, under the condition 𝜋/2 < 𝜃(𝜔) < 𝜋,cos 𝜃(𝜔) = 0 yields
tan 𝜃 (𝜔) =𝐾𝑑𝜔
𝐾𝑝− 𝐻𝜔
. (14)
Substituting (14) into (12) produces
lim𝜑(𝜔)→0
−
𝜕𝜑 (𝜔) /𝜕𝜃2(𝜔)
𝜕𝜑 (𝜔) /𝜕𝜃1(𝜔)
≈𝐻𝜔
𝐾2
𝑑𝜔2 (1/ (𝐻𝜔 − 𝐾
𝑝)) − 𝐾
𝑝
=𝐻2
𝜔2
− 𝐻𝜔𝐾𝑝
𝐾2
𝑑𝜔2 − 𝐾2
𝑝− 𝐻𝜔𝐾
𝑝
.
(15)

Mathematical Problems in Engineering 5
gf(s)
gf(s)
gf(s)
gf(s) gd(s)
gd(s)
gd(s)
gd(s)
gcr (s)
gcr (s)
ga(s)
ga(s)
ga(s)
ga(s)gc(s)
gc(s)
gc(s)
gc(s)hax
hbx
hay
hsby
hfax
hfbx
hfay
hfby
+
+
+
−
−−
−
−
−
−
+
−
irax
irbx
iray
irby
iax
ibx
iay
iby
Phasecompensation
Figure 3: Schematic diagram of the cross feedback controller withphase compensation of coupling channels.
gf(s)
gf(s)
gf(s)
gf(s)
gd(s)
gd(s)
gd(s)
gd(s)
gcr (s)
gcr (s)
gc(s)
gc(s)
gc(s)
gc(s)
gc(s)
gc(s)+
−
−−
−
−
+−
hax
hbx
hay
hsby
hfax
hfbx
hfay
hfby
+
−
+
−
irax
irbx
iray
irby
Dynamiccompensation
Figure 4: Schematic diagram of themodified cross feedback controlbased on phase compensation of cross channels.
Note that 𝐻𝜔 ≫ 𝐾𝑝and 𝐻2𝜔2 ≫ 𝐾
2
𝑑𝜔2
− 𝐾2
𝑝at high
rotating speeds, (𝐻2𝜔2 −𝐻𝜔𝐾𝑝)/(𝐾2
𝑑𝜔2
−𝐾2
𝑝−𝐻𝜔𝐾
𝑝) ≫ 1.
Therefore, as for theMSRwith high speed, comparedwith thephase lag of the decentralized channel, the phase lag of thecross channels is the main factor which influences the wholedecentralized PID plus cross feedback controller.
According to the analysis above, we can draw a conclusionthat, compared with the other compensation methods, thephase compensation based on cross feedback channel cangive attention to both the improvement of nutation stabilityand rejection of noise amplification. Just based on this, amodified cross feedback controller with phase compensationof cross channel is presented in this paper.
3.2. Modified Cross Feedback Controller with Phase Compen-sation of Cross Channel. Figures 3 and 4 show the traditionalphase compensation strategy based on coupling channelsand the proposed modified cross feedback control strategybased on cross channel, respectively. Compared with thetraditional cross feedback control (see Figure 1), the dynamiccompensation filter𝑔
𝑐(𝑠) is introduced into the cross channel.
Different from the existing cross feedback control with phasecompensation of cross channel, the presented method does
not need to compensate for every radial channel of theMSR. Only the two rotation modes of the MSR need tobe compensated instead of the four modes (two rotationmodes and two translation modes). That is, there are onlytwo compensation filters instead of four.Therefore, comparedto the traditional methods, computation resources and noiseamplification introduced by the phase compensation can begreatly reduced.
Combing (6), the control channel transfer function afterdynamic compensation can be described as
𝐺𝑐(𝑠) = 𝑔
𝑎(𝑠) 𝑔𝑓(𝑠) [𝑔𝑑(𝑠) + 𝑗2𝑔cr (𝑠) 𝑔𝑐 (𝑠)] 𝑒
−𝜏𝑠
. (16)
In is necessary to note that the quantitative analysis of thephase compensation filter 𝑔
𝑐(𝑠) can be further developed by
the nutation stability criterion of MSR [16] in practice.As for the laboratory setup (Figure 6), its rated rotor
speed is 200Hz, and its nutation frequency needed to becontrolled is about 290Hz. The frequency responses of thewhole control channel can be measured via a sine sweep testusing a dynamic signal analyzer.Thenwe can get the phase lagat the rated nutation frequency. According to system nutationstability criterion [16] and the desired performances, we caneasily resolve the least phase needed to be compensated.Based on these, considering the simplicity of realization andnoise rejection, a second-order filter can be designed, whosetransfer function is written as
𝑔𝑐(𝑠) =
5.3𝑠2
+ 8600𝑠 + 1.2 × 107
2.5𝑠2 + 5200𝑠 + 1.2 × 107. (17)
According to the nutation stability criterion of the MSR[16], the positive-frequency response curve can reveal thesystem nutation stability, including the critical nutationfrequency and its corresponding critical rotor speed. Thefrequency response comparisons among the three methodsare shown in Figure 5, which is drawn with MATLAB. FromFigure 5, compared with the cross feedback control withoutphase compensation, the magnitude and the phase lag ofthe control channel around 290Hz have been compensatedeffectively. According to the stability criterion of the nutationmode, the critical nutation frequency has been increasedfrom 300Hz to 468Hz, which means that the critical rotorspeed of nutation mode can be greatly improved. Althoughthe phase compensation method of radial channels can alsoincrease the critical nutation frequency to about 468Hz, itscorresponding amplitude of the amplitude response curveat this frequency is larger than that of the proposed one.Also according to the critical rotor speed of the nutationmode [16], the critical rotor speed of the nutation modeis smaller than that of the proposed method. Additionally,from Figure 5, it can be seen that the amplitude of the radialchannel compensation method is far larger than that of theproposed one in the whole high frequency range, whichinevitably introduces extra system noise.
Note that this phase compensation strategy adapts tonot only the decentralized PID plus filtered cross feedbackcontrol, but also other kinds of cross decoupling controlmethod, such as speed cross, filtered cross feedback control.

6 Mathematical Problems in Engineering
0
0.05
0.1
0.15
0.2Bode diagram
Frequency (Hz)
Without phase compensationWith phase compensation of radial channelsWith phase compensation of cross channels
101 102 103−135
−90
−45
0
45
90
𝜔n0 = 300Hz
𝜔n1 = 468Hz𝜔n2 = 468Hz
ik0 = 0.085
ik1 = 0.172
ik2 = 0.088
Mag
nitu
de (a
bs)
Phas
e (de
g)
Figure 5: Frequency response comparison of control channel.
Dynamic signalanalyzer
Controller andamplifier
Vacuum pump
MSCMG
Figure 6: Photograph of the fabricated laboratory setup.
3.3. Robustness to Model Errors of the Proposed Method. Asfor the linear stationary system of the rotational modes of theMSR, it can be described in the following differential operatorequations:
T (𝐷) x = U (𝐷)u,
y = V (𝐷) x +W (𝐷) u,(18)
where, u is 2-dimensional-input vector [𝑖𝛽𝑖𝛼]T, y is 2-
dimensional-output vector [𝛽 𝛼]T, x is the state vector of
the system [𝛽 𝛼]T, 𝐷 is the differential operator, and T(𝐷),
U(𝐷), W(𝐷), and V(𝐷) are, respectively, the polynomial of𝐷. The Laplace transformation of (18) under the zero initialcondition is
T (𝑠) x = U (𝑠)u,
y = V (𝑠) x +W (𝑠) u,(19)
where
T (𝑠) = [𝐽𝑟𝑠2
− 2𝑘ℎ𝑙2
𝑚−𝐽𝑧Ω𝑠
𝐽𝑧Ω𝑠 𝐽
𝑟𝑠2
− 2𝑘ℎ𝑙2
𝑚
] ,
U (𝑠) = [2𝑙𝑚𝑙𝑠𝑘𝑖𝑘𝑠 0
0 2𝑙𝑚𝑙𝑠𝑘𝑖𝑘𝑠
] ,
W (𝑠) = 02×2, V (𝑠) = I2×2.
(20)
Accordingly, the transfer function matrix of the con-trolled plant can be resolved as
P (𝑠) = V (𝑠)T−1 (𝑠)U (𝑠) +W (𝑠)
=2𝑙𝑚𝑙𝑠𝑘𝑖𝑘𝑠
(𝐽𝑟𝑠2 − 2𝑘
ℎ𝑙2𝑚)2
+ (𝐽𝑧Ω𝑠)2
× [𝐽𝑟𝑠2
− 2𝑘ℎ𝑙2
𝑚𝐽𝑧Ω𝑠
−𝐽𝑧Ω𝑠 𝐽
𝑟𝑠2
− 2𝑘ℎ𝑙2
𝑚
] .
(21)
According to Figure 4, the transfer functionmatrix of theforward channel of the control system can be written as
K (𝑠) = 𝑔𝑎(𝑠) 𝑒−𝜏𝑠
[𝑔𝑑(𝑠) 𝑔cr (𝑠) + 𝑔com (𝑠)
−𝑔cr (𝑠) − 𝑔com (𝑠) 𝑔𝑑(𝑠)
] .
(22)
Therefore the open-loop transfer function matrix of theMIMO system can be resolved as
Q (𝑠) = g𝑓(s)P (𝑠)K (𝑠)
=2𝑙𝑚𝑙𝑠𝑘𝑖𝑘𝑠𝑔𝑎(𝑠) 𝑔𝑓(𝑠) 𝑒−𝜏𝑠
(𝐽𝑟𝑠2 − 2𝑘
ℎ𝑙2𝑚)2
+ (𝐽𝑧Ω𝑠)2[𝜎1(𝑠) 𝜎
2(𝑠)
−𝜎2(𝑠) 𝜎1(𝑠)] ,
(23)
where
𝜎1(𝑠) = (𝐽
𝑟𝑠2
− 2𝑘ℎ𝑙2
𝑚) 𝑔𝑑(𝑠) − 𝐽
𝑧Ω𝑠 (𝑔cr (𝑠) + 𝑔com (𝑠)) ,
𝜎2(𝑠) = (𝐽
𝑟𝑠2
− 2𝑘ℎ𝑙2
𝑚) (𝑔cr (𝑠) + 𝑔com (𝑠)) + 𝐽𝑧Ω𝑔𝑑 (𝑠) 𝑠.
(24)
Accordingly, the open-loop transfer function matrix oftheMIMO system is a normal algebra matrix [14]. Accordingto the multiple-variable frequency-domain theory [18], thesystem has good robust performance to model errors sincethe open-loop transfer function matrix is a normal matrix.Therefore, the proposed phase compensation method isrobust to model errors of the controlled plant.
4. Simulation and Experimental Results
In order to demonstrate the effectiveness and validity ofthe proposed control strategy and to reveal how closely thetheory represented the physical system, both simulation andexperiments have been developed.

Mathematical Problems in Engineering 7
4.1. Simulation and Experimental Setup. As for the hardwarerealization is concerned, a TMS320C31 digital signal proces-sor (DSP) is employed. Both the sampling time and servotime are set to 150 𝜇s and the switching period is set to 50 𝜇s.The controller is well integrated in power electronics, whichoperates with a supply voltage of 28VDC.
Considering the interest bandwidths of the current loopand the position loop of the MSR and the simplicity of therealization, second-order antialias filters are introduced intoboth the displacement and current AD sampling of the MSRsystem, whose transfer function is given as
𝑔𝑓(𝑠) =
1
(3.3 × 10−5𝑠 + 1)2. (25)
For fair comparison of the decoupling, stability, and com-puter run time of the different methods, both the proposedcontroller and the channel decoupling approach employ thesame decentralized PID plus cross feedback controller andthe same phase compensation filter described as (17). Themain system parameters and the controller coefficients usedin simulations and experiments are listed in Tables 1 and 2 inthe Appendix.
The computer run time, that is, the computation delay, ofthe two methods is compared, and the test results are givenin Table 3. From Table 3, the proposed method has a muchshorter computer run time than that of the radial channelcompensation one. This verifies that the modified crossfeedback control method can largely simplify the industrialrealization with smaller computer resources than that of theexisting radial channel compensation, method, which is inaccordance with the analysis in Section 1.
4.2. Stability Performance and Noise Level. To verify theeffectiveness of the proposed control strategy to improve thesystem stability, rotor speed root locus method is employed.As for the rotor speed root locus, the speed range is from0 to 350Hz, and it is drawn every 7Hz. Figure 7 givesthe comparative results among the cross feedback controlwithout phase compensation, the cross feedback control withthe radial channel phase compensation and the modifiedcross feedback control strategy.
From Figure 7, as for the controller without phase com-pensation, the critical rotor speed of the nutation stabilityis only 203Hz and the critical rotor speed of precessionmode can reach to 315Hz. Obviously, the nutation stabilityis the main contradictory for the traditional cross feed-back controller, which is in agreement with the analysisin Section 1. From Figure 7(b), after employing the radialchannel phase compensation, the critical rotor speeds of thenutation and precession modes can increase to about 315Hzand 322Hz, respectively. With the proposed method, thecritical nutation rotor speed can be further increased to about336Hz, and the critical precession rotor speed has remainedapproximately constant. This indicates that the proposedmethod can greatly improve the stability of the nutationmode, improving effectively the system stability.
Table 1: System parameters of the MSCMG.
Parameter Value𝑚 56 kg𝐽𝑦
0.6032 kg⋅m2
𝑙𝑠
0.177m𝑘𝑖0
1140N/A𝐽𝑥
0.6032 kg⋅m2
𝐽𝑧
0.7958 kg⋅m2
𝑙𝑚
0.113m𝑘ℎ0
2.83N/𝜇m
Table 2: Parameters of the controller.
Parameter Value𝑘am 2.0𝑘𝑝
2.5𝑘𝑑
0. 008𝑘lc 0.00015𝑓h 300Hz𝑖𝑐
10𝑘𝑖
25𝑘hc 0.0045𝑘cr 1.0𝑓l 30Hz
Table 3: Computer run time of different control methods.
Method Computer run timeModified cross feedback control based onphase compensation of cross channels 108.1 𝜇s
Cross feedback control based on phasecompensation of radial channels 135.2 𝜇s
Figures 8 and 9 show the radical displacement responsesof the MSR with the cross feedback control with the tradi-tional phase compensation and the modified cross feedbackcontrol method, respectively. Comparing Figure 8(a) withFigure 9(a), it is obvious that the peak-peak value of the radialdisplacements has been greatly decreased. Also, comparingFigure 9(a) with Figure 9(b), the nutation amplitude of chan-nel𝐴𝑥has been decreased from about −40 dB to −44 dB, and
the frequency spectrum noise has been greatly alleviated tooby employing the proposed cross feedback control method.All of these demonstrate that the modified cross feedbackcontrol method cannot only improve the system nutationstability, but also can alleviate the system noises, which is inaccordance with the analysis made above.
From Figures 8 and 9, it can be found that the peak-peak amplitude of the radial channel with the proposedmethod is only about 10 𝜇m. Contrarily, it is about 15 𝜇mwiththe channel method. To be sure, it is dubious to judge thedecoupling performance of the controller presented in thispaper simply by the peak-peak amplitude since a good controlperformance may be achieved with the traditional con-troller by selecting carefully controller coefficients. However,

8 Mathematical Problems in Engineering
Image axis (rad/s)
Real
axis
Nutation
Precession
Nutation
Precession
100 101 102 103 104−500
−400
−300
−200
−100
0
100
200
Ωp2 = 315Hz Ωn1 = 21Hz
Ωn2 = 203HzΩp1 =
56Hz
(a)
Image axis (rad/s)
Real
axis
Nutation
PrecessionNutation
Precession
100 101 102 103 104−1000
−800
−600
−400
−200
0
200
Ωp2 = 322Hz Ωn1 = 14Hz Ωp1 = 35HzΩn2 = 315Hz
(b)
Nutation
Precession
Nutation
Precession
Image axis (rad/s)101 102 103 104
Real
axis
−500
−400
−300
−200
−100
0
100
200
Ωp2 = 315Hz Ωn1 = 28HzΩp1 = 42Hz
Ωn2 = 336Hz
(c)
Figure 7: Rotor speed root locus comparison for the MSR with the increase of the rotor speed. (a) Cross feedback control without phasecompensation. (b) Cross feedback control with traditional phase compensation method. (c) Modified cross feedback control. Note: thearrowhead denotes the increased direction of rotor speed.
0 0.1 0.2 0.3 0.4 0.5
0 0.1 0.2 0.3 0.4 0.5
0 0.1 0.2 0.3 0.4 0.5
0 0.1 0.2 0.3 0.4 0.5t (s)
10
0
−10
10
0
−10
10
0
−10
10
0
−10hax
(𝜇m
)hay
(𝜇m
)hbx
(𝜇m
)hby
(𝜇m
)
(a)
0 200 400 600 800 1000
Am
plitu
de (d
B)
Frequency (Hz)
Rotor speed
Nutation frequency
−55
−50
−45
−40
−35
−30
−25
−20
−15
(b)
Figure 8: Experimental results of the cross feedback control with the traditional phase compensation method. (a) Radical displacementresponses of the MSR. (b) Frequency spectrum of displacement ℎ
𝑎𝑥.

Mathematical Problems in Engineering 9
0 0.1 0.2 0.3 0.4 0.5
0 0.1 0.2 0.3 0.4 0.5
0 0.1 0.2 0.3 0.4 0.5
0 0.1 0.2 0.3 0.4 0.5t (s)
10
0
−10
10
0
−10
10
0
−10
10
0
−10hax
(𝜇m
)hay
(𝜇m
)hbx
(𝜇m
)hby
(𝜇m
)
(a)
Rotor speed
Nutation frequency
0 200 400 600 800 1000Frequency (Hz)
Am
plitu
de (d
B)
−55
−50
−45
−40
−35
−30
−25
−20
−15
(b)
Figure 9: Experimental results of themodified cross feedback control method. (a) Radical displacement responses of theMSR. (b) Frequencyspectrum of displacement ℎ
𝑎𝑥.
02040
−20020
−20020
−20020
0 0.4 0.8 1.2 1.6 2.0
0 0.4 0.8 1.2 1.6 2.0
0 0.4 0.8 1.2 1.6 2.0
0 0.4 0.8 1.2 1.6 2.0
t (s)
hax
(𝜇m
)hay
(𝜇m
)hbx
(𝜇m
)hby
(𝜇m
)
(a)
02040
−20020
−20020
−20020
0 0.4 0.8 1.2 1.6 2.0
0 0.4 0.8 1.2 1.6 2.0
0 0.4 0.8 1.2 1.6 2.0
0 0.4 0.8 1.2 1.6 2.0
t (s)
hax
(𝜇m
)hay
(𝜇m
)hbx
(𝜇m
)hby
(𝜇m
)
(b)
Figure 10: Experimental comparison of displacement responses based on two different controllers under the conditionΩ = 12000 r/min.(a) Decentralized PID plus cross decoupling control. (b) The proposed control.
the changes on the steady-state peak-peak amplitude with thesame controller and the same coefficients can undoubtedlyindicate the precision performance of a controller. In fact,for the traditional control, the steady-state precision is yetrelatively high. Extra control system delay degrades thedecoupling performance and extra high-pass filters result inextra system noise.
4.3. Decoupling Performance. In order to further provethat the proposed method can effectively improve the sys-tem decoupling performance, comparative simulations andexperiments have been developed too.
Under the condition Ω = 10000 r/min, at time 𝑡 = 0.2 s,the reference displacement of channel 𝐴
𝑥varies from 0 to
20𝜇m; the comparative experimental results are shown inFigure 10.
Obviously, the simulation and experimental results arein good agreement too. As seen in Figure 10(a), the stepresponses of channel𝐴
𝑥with the traditional controller result
in distinct fluctuations within the other three channels. Onthe other hand, the proposed controller brings few fluctua-tions into the other three channels, as shown in Figure 10(b).That is, one displacement step input almost does not affectthe other three outputs. Therefore, it can be suggested thatcompared with the traditional cross feedback control themodified method can realize higher decoupling precisionthan that of the traditional method, which also agrees verywell with the analysis in Section 2.

10 Mathematical Problems in Engineering
In fact, the traditional decentralized PID plus crossdecoupling control can restrain the coupling betweenx- and y-directions to a certain degree. However, it cannotcompletely eliminate the coupling owing to the phase lag ofthe control system.
5. Conclusion
To improve the nutation stability and the decoupling perfor-mances of the high-speed MSR with significant gyroscopiceffects, this paper proves at first that the phase lag of thecross channels is often themain factor influencing the systemnutation stability. Then a modified cross feedback controlbased on the dynamic compensation of the cross feedbackchannel is proposed, and its robustness to model errors isanalyzed. Simulation and experimental results demonstratethat compared with the traditional channel compensationmethod, the presented one not only can effectively enhancethe stability abundance and the decoupling performances, butalso can reduce computation resources and reject the systemnoises greatly.
Appendix
In Table 1, 𝑘𝑖0
and 𝑘ℎ0
are the current-force factor anddisplacement-force factor of the radial magnetic bearingsunder the conditions 𝑖
𝛾= 0 and ℎ
𝑚𝛾= 0 (𝛾 = 𝑎𝑥, 𝑎𝑦, 𝑏𝑥, 𝑏𝑦);
𝑅 and 𝐿 are the coil resistance and inductance of the radialmagnetic bearings.
In Table 2, 𝑘𝑎𝑚
and 𝑖𝑐are the proportional and feedback
coefficients of the current controller for the MSR system,which are the same as that of the proposed controller; 𝑘
ℎ𝑐
and 𝑘𝑙𝑐are the cross coefficients of the high-pass and low-
pass filters, respectively; 𝑘cr is the total cross coefficient; 𝑓ℎ
and 𝑓𝑙are the cut-off frequencies of the two-order high-pass
and low-pass filters.
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper.
Acknowledgments
This work was supported in part by the National BasicResearch Program of China, under Grant 2009CB72400101C,and by the National Natural Science Foundation of China.
References
[1] S. P. Bhat and P. K. Tiwari, “Controllability of spacecraftattitude using control moment gyroscopes,” IEEE Transactionson Automatic Control, vol. 54, no. 3, pp. 585–590, 2009.
[2] M. D. Carpenter and M. A. Peck, “Dynamics of a high-agility,low-power imaging payload,” IEEE Transactions on Robotics,vol. 24, no. 3, pp. 666–675, 2008.
[3] B. Thornton, T. Ura, Y. Nose, and S. Turnock, “Zero-G classunderwater robots: Unrestricted attitude control using control
moment gyros,” IEEE Journal of Oceanic Engineering, vol. 32, no.3, pp. 565–583, 2007.
[4] M. D. Carpenter and M. A. Peck, “Reducing base reactionswith gyroscopic actuation of space-robotic systems,” IEEETransactions on Robotics, vol. 25, no. 6, pp. 1262–1270, 2009.
[5] T. Schuhmann, W. Hofmann, and R. Werner, “Improvingoperational performance of active magnetic bearings usingKalman filter and state feedback control,” IEEE Transactions onIndustrial Electronics, vol. 59, no. 2, pp. 821–829, 2012.
[6] J. Fang and Y. Ren, “High-precision control for a single-gimbalmagnetically suspended control moment gyro based on inversesystem method,” IEEE Transactions on Industrial Electronics,vol. 58, no. 9, pp. 4331–4342, 2011.
[7] S.-L. Chen and C.-C. Weng, “Robust control of a voltage-controlled three-pole active magnetic bearing system,”IEEE/ASME Transactions on Mechatronics, vol. 15, no. 3, pp.381–388, 2010.
[8] J. Fang and Y. Ren, “Decoupling control of magnetically sus-pended rotor system in control moment gyros based on aninverse system method,” IEEE/ASME Transactions on Mecha-tronics, vol. 17, pp. 1133–1144, 2012.
[9] J. Fang and Y. Ren, “Self-adaptive phase-lead compensationbased on unsymmetrical current sampling resistance networkfor magnetic bearing switching power amplifiers,” IEEE Trans-actions on Industrial Electronics, vol. 59, no. 2, pp. 1218–1227,2012.
[10] J.-W. Kim, S.-Y. Yoo, Y.-C. Bae, and M. D. Noh, “Optimaldesign of magnetically-levitated flywheel energy storage systemconsidering system stability,” in Proceedings of the ICROS-SICEInternational Joint Conference (ICCAS-SICE ’09), pp. 4401–4406, Fukuoka, Japan, August 2009.
[11] M. Ahrens, L. Kucera, and R. Larsonneur, “Performance of amagnetically suspended flywheel energy storage device,” IEEETransactions on Control Systems Technology, vol. 4, no. 5, pp.494–502, 1996.
[12] G.V. Brown,A.Kascak, R.H. Jansen, T. P.Dever, andK. P.Duffy,“Stabilizing gyroscopic modes in magnetic-bearing-supportedflywheels by using cross-axis proportional gains,” in Proceedingsof the AIAA Guidance, Navigation, and Control Conference, pp.1132–1143, AIAA, San Francisco, Calif, USA, August 2005.
[13] T. P. Dever, G. V. Brown, K. P. Duffy, and R. H. Jansen,“Modeling and development of a magnetic bearing controllerfor a high speed flywheel system,” in Proceedings of the 2ndInternational Energy Conversion Engineering Conference, pp.888–899, AIAA, Providence, RI, USA, August 2004.
[14] Y. Ren, D. Su, and J. Fang, “Whirling modes stability criterionfor a magnetically suspended flywheel rotor with significantgyroscopic effects and bending modes,” IEEE Transactions onPower Electronics, vol. 28, pp. 5890–5901, 2013.
[15] Y. Ren and J. Fang, “Current-sensing resistor design to includecurrent derivative in PWMH-bridge unipolar switching poweramplifiers for magnetic bearings,” IEEE Transactions on Indus-trial Electronics, vol. 59, pp. 4590–4600, 2012.
[16] J. Fang, Y. Ren, and Y. Fan, “Nutation and precession sta-bility criterion of magnetically suspended rigid rotors withgyroscopic effects based on positive and negative frequencycharacteristics,” IEEE Transactions on Industrial Electronics, vol.61, pp. 2003–2014, 2014.

Mathematical Problems in Engineering 11
[17] Y. Ren and J. Fang, “High-precision and strong-robustnesscontrol for a MSCMG based on modal separation and rotationmotion decoupling strategy,” IEEE Transactions on IndustrialElectronics, vol. 61, pp. 1539–1551, 2014.
[18] A. Postlethwaite and G. J. MacFarlane, A Complex VariableApproach To the Analysis of Linear Multivariable FeedbackSystems, Springer, Berlin, Germany, 1979.

Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
CombinatoricsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Stochastic AnalysisInternational Journal of