Embed Size (px)
Citation preview

Research ArticleOptimum Tuning of a Gyroscopic VibrationAbsorber Using Coupled Gyroscopes for VibrationControl of a Vertical Cantilever Beam
F Uumlnker1 and O CcediluvalcJ2
1Department of Mechanical Engineering Gumushane University 29100 Gumushane Turkey2Department of Mechanical Engineering Karadeniz Technical University 61100 Trabzon Turkey
Correspondence should be addressed to F Unker farukunkergumushaneedutr
Received 28 September 2015 Accepted 20 December 2015
Academic Editor Mickael Lallart
Copyright copy 2016 F Unker and O Cuvalcı This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
This paper deals with the investigation of optimum values of the stiffness and damping which connect two gyroscopic systemsformed by two rotors mounted in gimbal assuming negligible masses for the spring damper and gimbal support These coupledgyroscopes use two gyroscopic flywheels spinning in opposing directions to have reverse precessions to eliminate the forces dueto the torque existing in the torsional spring and the damper between gyroscopes The system is mounted on a vertical cantileverwith the purpose of studying the horizontal and vertical vibrations The equation of motion of the compound system (gyro-beamsystem) is introduced and solved to find the response measured on the primary system This is fundamental to design in someway the dynamic absorber or neutralizer On the other hand the effect of the angular velocities of the gyroscopes are studied andit is shown that the angular velocity (spin velocity) of a gyroscope has a significant effect on the behavior of the dynamic motionCorrectness of the analytical results is verified by numerical simulations The comparison with the results from the derivation ofthe corresponding frequency equations shows that the optimized stiffness and damping values are very accurate
1 Introduction
The attenuation of vibration caused by dynamic effects isdesired inmany engineering fields To reduce or eliminate theundesirable motions various types of structural control the-ories have been developed and evolved for different dynamicloads and quite a few of them have been potentially practi-cally useful Structural control methods can be classified aspassive active and semiactive control methods according totheir energy consumption [1 2] In the last decades differenttypes of structural control devices have been investigated forthe possibility of using active and semiactive controlmethodsto develop the control forces upon passive approaches formitigating structural responses [2ndash7] However the passivecontrol method is activated by the structural motion with-out requiring external force or energy to reduce structuralresponses and utilizes the motion of the structure at thelocation of the device [8] Active control method requires
considerable amount of external power to operate actuatorsthat supply a control force to the structure Due to requiringsensors and evaluatorcontroller equipment active controldevices are more complex and furthermore they do nothave reliability low cost and robustness compared to passivecontrol techniques [6] On the other hand the active controlis able to adapt to structural changes and to varying loadingconditions
The gyroscopic moment induced by a rotating objectoffers attractive means to protect structures against naturalhazards in various ways The engineering community havedeveloped various stabilizer systems as ameans formitigatingthe effects of dynamic loading on structures The use ofgyrostabilizers has emerged as they have an ability to controlvibration at low frequency and represent a weight and volumesaving and furthermore the stored kinetic energy can pro-vide emergency power [9ndash11] For roll reduction Dr Schlickcarried out such a device that has a high speed rotating
Hindawi Publishing CorporationShock and VibrationVolume 2016 Article ID 1496727 10 pageshttpdxdoiorg10115520161496727
2 Shock and Vibration
u
S
z(t)
Figure 1 Cantilever model with end mass coupled gyroscopes and horizontal base excitation
disk at a constant speed and yields producing a resistivegyroscopic torque as a source of angular momentum [12 13]Themechanism does not require any other external source ofenergy in which the rotor speed is produced by an electricmotor in a rotating gimbal Therefore this can be classifiedas a passive control device in a variation of passive vibrationcontrol systems The gyrostabilizer is effective for bendingmoments rather than shear forces because the gyrostabilizerutilizes the gyroscopic moment to reduce or eliminate theundesirable motions Consequently the purpose of this studyis to evaluate a passive coupled-gyroscopic stabilizer as amodified form of Schlickrsquos gyroscope The problem of theSchlick gyroscope is solved by using an optimum torsionalspring and damper to control the precession of the coupledgyroscopes that has also been developed for vibrationmitiga-tion of structures subjected to environmental and manmadeloads The coupled gyroscopes use two gyroscopic flywheelsspinning in opposing directions to have reverse precessions120579 to eliminate the forces due to the torque existing in thetorsional spring and the damper between gyroscopes Inthis paper the optimal values of the rotor speed torsionalspring and damper are theoretically analyzed and derivedfor a cantilever beam The rotor speed the torsional springand the viscous damping for this gyrostabilizer are so tunedthat this system is more adaptable and has smaller mass thanother conventional control devices with the same ability to beemployed for vibration control
2 Equations of Motion of the Gyros(Coupled)-Beam System for Small Vibration
Here the beam has mass density 120588 cross-sectional area 119860equivalent Youngrsquos modulus 119864 moment of inertia of planearea 119868 and moment of inertia 119868
119905of a tip mass Figure 1 shows
a beam as a vertical cantilever with an end mass 119872119905to
which an additional gyro system (coupled gyroscopes with
massless spring damper frame and gimbal) is attached Thehorizontal displacement of base subjected to a harmonic baseexcitation is 119911 The beam is assumed to be initially straightof length 119871 The horizontal and vertical elastic displacementsat the free end are V and 119906 respectively Due to elasticdeformation of the beam 119904 represents the distance along arc-length of the beam
The kinetic energy of the compound system (gyro-beamsystem) as shown in Figure 1 is
119879 =1
2120588119860int
119871
0
[(V (119904 119905) + (119905))2+ (119904 119905)
2] 119889119904
+1
2119872119905[(V (119905) + (119905))
2+ (119905)
2] +
1
21198681199052
+1
21198981[(V (119905) + (119905))
2+ (119905)
2]
+1
21198982[(V (119905) + (119905))
2+ (119905)
2] + 1198791198921
+ 1198791198922
(1)
where the motion of a gyro can be described by Eulerrsquos angles120579 and 120593 It is not difficult to show that the kinetic energy ofgyroscopes can be expressed as
1198791198921
=1
21198681199001
[2
1+ ( cos 120579
1)2
] +1
21198681199011
(Ω1+ sin 120579
1)2
1198791198922
=1
21198681199002
[2
2+ ( cos 120579
2)2
] +1
21198681199012
(Ω2+ sin 120579
2)2
(2)
The potential energy of the compound system can be writtenas
119881 =1
2119864119868int
119871
0
119902 (119904 119905)2119889119904 minus 120588119860119892int
119871
0
119906 (119904 119905) 119889119904 minus 119872119905119892119906 (119905)
+1
2119896 (1205791minus 1205792)2
minus 1198981119892119906 (119905) minus 119898
2119892119906 (119905)
(3)
Shock and Vibration 3
1205791
Mt
m1
Ω1k c
m2
Ω2
1205792
Figure 2 Coupled gyroscopes via a massless torsional spring with stiffness 119896 and a massless torsional damper with coefficient 119888
The dissipation function119863 takes the form
119863 =1
2119888 (2minus 1)2
(4)
The gyro system consists of two disks which can spin freelyabout their geometric axis via the massless gimbals mountedto the tip mass of the beam The disk masses 119898 of the gyros
at free end are assumed to have reverse angular speeds Ω
and the precessions 120579 and also resisted by a torsional springand damper torque defined by 119896(120579
2minus 1205791) and 119888(
2minus 1)
respectively as shown in Figure 2Equations of the beam and gyro have been expressed in
equations (16) (17) and (18) in [14] as follows respectively
1205881198601198661+ 1198981+ 1198982+ 119872119905+ 1198681199051198662
5+ (120588119860119866
3+ (1198981+ 1198982+ 119872119905) 1198662
4+ 1198681199051198664
5) V2 +
1
41198681199051198666
5V4
+(1198665+
1
2V211986635)
2
[1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
] + (1198665+
1
2V211986635)
2
[1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
V
+ [1205881198601198663+ (1198981+ 1198982+ 119872119905) 1198662
4+ 1198681199051198664
5+
1
21198681199051198666
5V2] VV2
+ [1198641198681198666minus 120588119860119892119866
9minus (1198981+ 1198982+ 119872119905) 1198921198664+ 2119864119868119866
7V2 +
3
41198641198681198668V4] V
+ (1198665+
1
2V211986635)
[[[[[[[[[
[
(1198681199011
minus 1198681199001) (V119866
5+
1
2V2V11986635) 1205791sin 2120579
1
+1198681199001
(VV211986635) (cos 120579
1)2
+1198681199011
(VV211986635) (sin 120579
1)2
+1198681199011Ω1
1205791cos 1205791
]]]]]]]]]
]
+ (1198665+
1
2V211986635)
[[[[[[[[[
[
(1198681199012
minus 1198681199002) (V119866
5+
1
2V2V11986635) 1205792sin 2120579
2
+1198681199002
(VV211986635) (cos 120579
2)2
+1198681199012
(VV211986635) (sin 120579
2)2
+1198681199012Ω2
1205792cos 1205792
]]]]]]]]]
]
= minus (1205881198601198662+ 1198981+ 1198982+ 119872119905)
(5)
1198681199001
1205791minus
1
2(1198681199011
minus 1198681199001) (V119866
5+
1
2V2V11986635)
2
sin 21205791minus 1198681199011Ω1(V1198665+
1
2V2V11986635) cos 120579
1minus 119888 (
2minus 1) minus 119896 (120579
2minus 1205791) = 0 (6a)
4 Shock and Vibration
1198681199002
1205792minus
1
2(1198681199012
minus 1198681199002) (V119866
5+
1
2V2V11986635)
2
sin 21205792minus 1198681199012Ω2(V1198665+
1
2V2V11986635) cos 120579
2+ 119888 (
2minus 1) + 119896 (120579
2minus 1205791) = 0 (6b)
where the constants from 1198661to 1198669are given in Table 2 After the rearrangement (5) becomes
1205721+ 1205722V2 + 120572
3V4
+(1198665+
1
2V211986635)
2
[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
V +
1205722+ 21205723V2 + 119866
3
5(1198665+
1
2V211986635)[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
VV2
+ [1205724+ 1205725V2 + 120572
6V4] V + (119866
5+
1
2V211986635)
[[[[[[[[[
[
(1198681199011
minus 1198681199001) V (119866
5+
1
2V211986635) 1205791sin 2120579
1
+ (1198681199012
minus 1198681199002) V (119866
5+
1
2V211986635) 1205792sin 2120579
2
+1198681199012Ω2
1205792cos 1205792
+1198681199011Ω1
1205791cos 1205791
]]]]]]]]]
]
= minus120574
(7)
in which
1205721= 120588119860119866
1+ 1198981+ 1198982+ 119872119905+ 1198681199051198662
5
1205722= 120588119860119866
3+ (1198981+ 1198982+ 119872119905) 1198662
4+ 1198681199051198664
5
1205723=
1
41198681199051198666
5
1205724= 119864119868119866
6minus 120588119860119892119866
9minus (1198981+ 1198982+ 119872119905) 1198921198664
1205725= 2119864119868119866
7
1205726=
3
41198641198681198668
120574 = 1205881198601198662+ 1198981+ 1198982+ 119872119905
(8)
Neglecting the terms of higher power for small vibrations (V asymp
0) (6a) and (6b) and (7) can be reduced to
1198681199001
1205791minus
1
2(1198681199011
minus 1198681199001) (V1198665)2 sin 2120579
1
minus 1198681199011Ω1(V1198665) cos 120579
1minus 119888 (
2minus 1)
minus 119896 (1205792minus 1205791) = 0
(9a)
1198681199002
1205792minus
1
2(1198681199012
minus 1198681199002) (V1198665)2 sin 2120579
2
minus 1198681199012Ω2(V1198665) cos 120579
2+ 119888 (
2minus 1)
+ 119896 (1205792minus 1205791) = 0
(9b)
1205721
+1198662
5[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
V
+
1205722+ 1198664
5[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
VV2
+ 1205724V + 1198665
[[[[[[
[
(1198681199011
minus 1198681199001) V1198665
1205791sin 2120579
1
+ (1198681199012
minus 1198681199002) V1198665
1205792sin 2120579
2
+1198681199012Ω2
1205792cos 1205792
+1198681199011Ω1
1205791cos 1205791
]]]]]]
]
= minus120574
(10)
3 Optimal Tuning aboutthe Equilibrium Position
The easiest way to approach this problem is from the point ofview of energy We have chosen the kinetic to be zero whenthe tip mass is at the bottom of its swing Setting V asymp 0 and asymp 0 about the equilibrium position (9a) and (9b) and (10)are reduced to
1198681199001
1205791minus 1198681199011Ω1(V1198665) cos 120579
1minus 119888 (
2minus 1) minus 119896 (120579
2
minus 1205791) = 0
(11a)
1198681199002
1205792minus 1198681199012Ω2(V1198665) cos 120579
2+ 119888 (
2minus 1) + 119896 (120579
2
minus 1205791) = 0
(11b)
1205721+ 1198662
5[1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+ 1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
] V + 1205724V + 1198665(1198681199011Ω1
1205791cos 1205791
+ 1198681199012Ω2
1205792cos 1205792) = minus120574
(12)
Shock and Vibration 5
The natural frequencies of gyro and beam can be determinedas follows respectively
1205962
1198921=
119896
1198681199001
1205962
1198922=
119896
1198681199002
(13a)
1205962
119899=
1205724
1205721+ 11986625[1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+ 1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
(13b)
Assume a harmonic disturbing base excitation 119911 = 119911119890119895120596119905 and
the responses may be written as angular frequency 120596
120579 = 120579119890119895120596119905
V = V119890119895120596119905(14)
Therefore (11a) and (11b) and (12) can be rewritten in thematrix form
1205791
[[[
[
11989512059611986651198681199011Ω1cos 1205791
minus11986811990011205962+ 119895119888120596 + 119896
minus119895119888120596 minus 119896
]]]
]
+ 1205792
[[[
[
11989512059611986651198681199012Ω2cos 1205792
minus119895119888120596 minus 119896
minus11986811990021205962+ 119895119888120596 + 119896
]]]
]
+ V
[[[[[[[[[[
[
minus1205962
1205721
+1198662
5[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
+ 1205724
minus1198951205961198681199011Ω11198665cos 1205791
minus1198951205961198681199012Ω21198665cos 1205792
]]]]]]]]]]
]
=[[[
[
1205962120574119911
0
0
]]]
]
(15)
The responses of gyro-1 and gyro-2must become equal (|1205791| =
|1205792|) when 119868
1199001= 1198681199002 1198681199011
= 1198681199012 andΩ
1= minusΩ2 Hence solving
these equations yields
V =
1205962120574119911 [(minus119868
1199001205962+ 119895119888120596 + 119896)
2
minus (minus119895119888120596 minus 119896)2
]
119909
(16)
1205791
=1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) [(minus119868
1199001205962+ 119895119888120596 + 119896) minus (minus119895119888120596 minus 119896)]
119909
(17a)
1205792
=minus1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) [(minus119868
1199001205962+ 119895119888120596 + 119896) minus (minus119895119888120596 minus 119896)]
119909
(17b)
where 119909 = (1198951205961198665119868119901Ω cos 120579)2[4(119895119888120596+119896)minus2119868
1199001205962]+[minus120596
21205721+
21198662
5[119868119900(cos 120579)2+119868
119901(sin 120579)
2]+1205724][(minus1198681199001205962+119895119888120596+119896)
2minus(minus119895119888120596minus
119896)2]
31 The Undamped Gyroscopic Vibration Absorber By elimi-nating terms of damping (17b) then yields
1205792=
minus1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) (minus119868
1199001205962+ 2119896)
2 (1198951205961198665119868119901Ω cos 120579)
2
(minus1198681199001205962 + 2119896) + [minus1205962 120572
1+ 211986625[119868119900(cos 120579)2 + 119868
119901(sin 120579)
2] + 120572
4] (minus1198681199001205962) (minus119868
1199001205962 + 2119896)
(18)
6 Shock and Vibration120596
max
5069450694506945069450694506945069550695506955069550695
minus1 minus05 0 05 1 15minus15
120579 (rad)
(a)
050 1 15minus1 minus05minus15
120579 (rad)
120579co
s(120579
)
minus05
minus04
minus03
minus02
minus01
00102030405
(b)
Figure 3 The theoretical limit curves natural frequency rads (a) gyro response rad (b)
When 1205962= 1205962
119899and 120579 = 120579
2= 120579max for equation of a stable
motion at120596 le 120596119899except for1205962 = 119896119868
0= 1205962
119892 (18) corresponds
to
10038161003816100381610038161003816120579max
10038161003816100381610038161003816=
120574119911120596119899
21198665119868119901Ω cos 120579max
(19)
Equation (19) can be modified into the following forms
120579max cos 120579max = plusmn120596119899120574119911
21198681199011198665Ω
120596max = plusmn21198681199011198665Ω120579max cos 120579max
120574119911
(20)
Theminimum disk speedΩmin should be chosen carefully toeliminate the instability at 120596 le 120596
119899 Suppose that a minimum
disk speed Ωmin is required for a stable motion Then thistransforms to a minimum disk speed equation
Ωmin = plusmn120596119899120574119911
21198681199011198665120579max cos 120579max
(21)
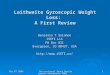
Figure 3 shows that the theoretical limit of the amplitude atresonance is one when absolute value of the precession 120579maxapproaches 086 rad Suppose that |120579max cos 120579max| = 05611
and |120579max| = 086 rad for minus1205872 le 120579 le 1205872 Equation (21) maybe rewritten as
Ωmin = 08911120596119899120574119911
1198681199011198665
(22)
where (13b) is then
120596119899= radic
1205724
1205721+ 211986625[0426119868
119900+ 0574119868
119901] (23)
For the minimum tip mass displacement |V| = 0 theexcitation frequency should be 120596
2= 2119896119868
119900obtained from
(16)
5 10 15 20 25 300Forcing frequency 120596 (rads)
0002004006008
01012014016018
02
Abs
disp
lace
men
t|| (
m)
Figure 4 The theoretical frequency response curves of tip of beamwithΩmin = 15850 rpm and 119911 = 005m for (dotted) 119896 = 0 and 119888 = 0for (dash-dot) 119896 = 119868
11990012059622 and 119888 = 0 and for (solid) 119896 = 119868
11990012059622 and
119888 = 11986811990012059624120596119892
32 The Damped Gyroscopic Vibration Absorber With thehelp of (16) in order to reach the minimum tip massdisplacement |V| = 0 it can be rewritten as
1205962120574119911 [(minus119868
1199001205962+ 119895119888120596 + 119896)
2
minus (minus119895119888120596 minus 119896)2
] = 0 (24)
Then optimal damping can be obtained
119888 = plusmn1198681199001205962minus 2119896
2120596 (25)
Set 119896 = 1198681199001205962
1198992 and 120596 = 120596
119892= radic119896119868
119900to eliminate the
instability due to the natural frequency of the added gyro-spring system Equation (25) is then
119888opt =1198681199001205962
119899
4120596119892
(26)
Figure 4 shows the possible maxima and minima of thetheoretical frequency response at the tip of beam
4 Numerical Simulations
In the following calculations a rectangle-cross beam isconsidered with thickness ℎ = 100mm width 119887 = 150mm
Shock and Vibration 7
Table 1 Physical properties of the system
Symbol Numerical values Description119864 210 times 109Nm2 Youngrsquos modulusℎ 100mm Beam thickness119887 150mm Beam width119871 5m Length of the beam120588 7850 kgm3 Density of the beam119872119905
2000 kg Tip mass119868119905119872119905
02m2 Ratio of tip mass moment of inertia119868119905
400 kgsdotm2 Tip mass moment of inertia119868 125 times 10minus5m4 Geometrical moment of inertia of beam119892 981ms2 Gravitational acceleration119860 = 119887 sdot ℎ 0015m2 Area of cross section of beam119888 119868
1199001205962
1198994120596119892Nsdotmsdotsrad Damping coefficient
119896 119868o1205962
1198992Nsdotmrad Stiffness of torsion spring
119898 = 1198981= 1198982
50 kg Disk mass of gyroscope119903 = 1199031= 1199032
02m Radius of disk119868119901= 1198681199011
= 1198681199012
= 119898 sdot 11990322 1 kgsdotm2 Rotary inertia of disk
119868119900= 1198681199001
= 1198681199002
= 1198681199012 05 kgsdotm2 Mass moment of inertia of disk
Ω = Ω1= minusΩ
20ndash30000 rpm Rotating speed of disk
Table 2 Constants of the equation of motion of the gyro-beam system in SI units
1198661
1198662
1198663
1198664
1198665
1198666
1198667
1198668
1198669
11338 18169 00552 02467 03142 00244 60087119890 minus 4 29652119890 minus 5 03669
length 119871 = 5m density 120588 = 7850 kgm3 and Youngrsquosmodulus along the axial direction 119864 = 210 times 10
9Nm2Equations may be solved by using a Matlab software toolthat involves the fourth-order Runge-Kutta method Theparameters of the numerical example are given in Table 1 Inorder to identify the dynamical behavior frequency responseis simulated with the time step size of 01 s and zero initialconditions
41 The Undamped Gyroscopic Vibration Absorber In thecase of the base excitation with 119911 = 005 cos(120596
119899119905) Figure 5
shows the rotational speed curve for case 119896 = 1198681199001205962
1198992 It can
be seen that tip response of beam is effectively reduced overminimum rotational speed (Ωmin = 15850 rpm)
Figure 6 represents the frequency response curve of thebeam and gyro for cases Ωmin = 15850 rpm and 119896 = 119868
1199001205962
1198992
It presented that the displacement response is effectivelyreduced before the case 120596 = 120596
119899 But resonance occurs when
120596 = 120596119899 However over the resonance frequency reduction
of the vibration continues to reach the optimum scale atminimum rotational speed
42 The Damped Gyroscopic Vibration Absorber In the caseof the base excitation with 119911 = 005 cos(120596
119899119905) Figure 7 shows
the rotational speed curve for cases 119896 = 1198681199001205962
1198992 and 119888opt =
1198681199001205962
1198994120596119892The response of the beam is effectively reduced and
effect reaches low rotational speeds compared to undamped
gyrosWhen damping coefficient is zero the response of gyrocan jump into unstable zone at resonance as seen in Figure 5
It can be seen that the case of 119888opt = 1198681199001205962
1198994120596119892Nsdotmsdotsrad
is an optimumdamping coefficient which effectively reducedthe response of the beam at resonance shown in Figure 8When optimum damping coefficient is chosen the frequencyresponse of the beam can improve compared to Figures 5 and6 therefore cases 119896 = 119868
1199001205962
1198992 and 119888opt = 119868
1199001205962
1198994120596119892are chosen
to reach the optimum scale for minimum rotational speedAs a result it is shown that optimum values of the stiffnessand damping which connect two gyroscopic systems have asignificant effect on the the performance of the gyroscopicvibration absorberOn the other hand the performance of thesystem is improved as we increase the rotor speed as shownin Figure 9
5 Conclusions
The optimal parameters of the rotor speed the springand damper for the minimum responses of the gyroscopesand beam are studied This paper provides some analyticalequations to investigate these optimal parameters of a gyro-beam system The effectiveness is presented by computersimulations and the numerical results agree with the analyt-ical solutions From the consistency of the present study thefollowing conclusions are found
(1) Up to a certain rotor speed there is no mitigation inthe vibration of beam at free end But beyond this
8 Shock and Vibration
05
1
15
2
25
3D
ispla
cem
ent (
m)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
01020304050607080
05 1 15 2 25 30Ω (rpm)
(b)
Figure 5 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with the base excitation
of 119911 = 005 cos(120596119899119905)
0010203040506070809
1
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
5
10
15
20
25
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(b)
Figure 6 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with
the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
Disp
lace
men
t (m
)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
02468
101214161820
05 1 15 2 25 30Ω (rpm)
(b)
Figure 7 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892=
09Nmsrad with the base excitation of 119911 = 005 cos(120596119899119905)
as we increase the rotor speed the gyro system hassignificantly reduced the vibration of beam Hencethis value is selected as the minimum rotor speed(Ωmin = 08911(120596
1198991205741199111198681199011198665)) The rotary inertia of
the rotor can be reduced by increasing rotor speedwhich is proportional to the mass of disk Thereforethe weight and volume of the system can be reduced
(2) There exist optimum parameters for the spring anddamper for minimum response of the beam Thestiffness of the spring and damper affect the per-formance of gyroscopes The gyroscopes can jumpinto unstable zone when the stiffness is not takenproperly Optimum spring and damper parametersfor minimum response are obtained from frequency
Shock and Vibration 9
0
005
01
015
02
025
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
0
2
4
6
8
10
(b)
Figure 8 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and
119888opt = 1198681199001205962
1198994120596119892= 09Nmsrad with the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
3
Disp
lace
men
t (m
)
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
2
4
6
8
10
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(b)
Figure 9 Frequency response curves for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892
= 09Nmsrad tip response of beam (a) gyroresponse (b) for (o) Ω = 0 rpm (+) Ω = 7500 rpm and (◻)Ω = 10000 rpm with the base excitation of 119911 = 005 cos(120596119905)
equation of beam The minimum displacement hav-ing optimum spring coefficient should be chosen foroptimal damper at the resonance frequency Thensetting 120596 = 120596
119892to eliminate the instability due
to the natural frequency of the added gyro-springsystem results in optimal damping Coupling thegyroscopes with the optimal spring (119896 = 119868
1199001205962
1198992) and
damper (119888 = 1198681199001205962
1198994120596119892) is a practical and effective
approach to mitigate the undesired motions of beamand gyroscopes
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This study was mainly supported by the Scientific and Tech-nological Research Council of Turkey (TUBITAK) underGrant no 114M760
References
[1] T K Datta ldquoA state-of the-art review on active control ofstructuresrdquo ISET Journal of Earthquake Technology Paper No430 vol 40 no 1 pp 1ndash17 2003
[2] G W Housner L A Bergman T K Caughey et al ldquoStruc-tural control past present and futurerdquo Journal of EngineeringMechanics vol 123 no 9 pp 897ndash971 1997
[3] T T Soong Active Structural Control Theory and PracticeLongman Scientific and Technical New York NY USA 1990
[4] B F Spencer Jr and M K Sain ldquoControlling buildings a newfrontier in feedbackrdquo IEEEControl SystemsMagazine vol 17 no6 pp 19ndash35 1997
[5] T Kobori ldquoPast present and future in seismic response controlin civil engineering structuresrdquo in Proceedings of the 3rd WorldConference on Structural Control pp 9ndash14 Wiley New YorkNY USA 2003
[6] T T Soong and B F Spencer Jr ldquoSupplemental energy dissi-pation state-of-the-art and state-of-the-practicerdquo EngineeringStructures vol 24 no 3 pp 243ndash259 2002
[7] B F Spencer Jr ldquoCivil engineering applications of smartdamping technologyrdquo in Proceedings of the 5th International
10 Shock and Vibration
Conference on Vibration Engineering pp 771ndash782 NanjingChina 2002
[8] T T Soong andG F DargushPassive EnergyDissipation Systemin Structural Engineering Wiley New York NY USA 1997
[9] N C Townsend A J Murphy and R A Shenoi ldquoA new activegyrostabiliser system for ride control of marine vehiclesrdquoOceanEngineering vol 34 no 11-12 pp 1607ndash1617 2007
[10] BThornton TUra YNose and S Turnock ldquoInternal actuationof underwater robots using control moment gyrosrdquo in Proceed-ings of the IEEE OCEANS Conference vol 1 pp 591ndash598 BrestFrance June 2005
[11] T Perez and P Steinmann ldquoAnalysis of ship roll gyrostabilisercontrolrdquo in Proceedings of the 8th IFAC Conference on Manoeu-vring and Control of Marine Craft pp 310ndash315 Guaruja BrazilSeptember 2009
[12] E O Schlick ldquoDevice for minimising the oscillatory move-ments of shipsrdquo Patent US769 493 1904
[13] E O Schlick ldquoThe gyroscopic effect of flywheels on board shiprdquoTransactions of the Institute of Naval Architects vol 23 pp 117ndash134 1904
[14] F Unker andO Cuvalcı ldquoNonlinearmotion control of a columnusing a coupled gyroscoperdquo ProcediamdashSocial and BehavioralSciences vol 195 pp 2242ndash2252 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Shock and Vibration
u
S
z(t)
Figure 1 Cantilever model with end mass coupled gyroscopes and horizontal base excitation
disk at a constant speed and yields producing a resistivegyroscopic torque as a source of angular momentum [12 13]Themechanism does not require any other external source ofenergy in which the rotor speed is produced by an electricmotor in a rotating gimbal Therefore this can be classifiedas a passive control device in a variation of passive vibrationcontrol systems The gyrostabilizer is effective for bendingmoments rather than shear forces because the gyrostabilizerutilizes the gyroscopic moment to reduce or eliminate theundesirable motions Consequently the purpose of this studyis to evaluate a passive coupled-gyroscopic stabilizer as amodified form of Schlickrsquos gyroscope The problem of theSchlick gyroscope is solved by using an optimum torsionalspring and damper to control the precession of the coupledgyroscopes that has also been developed for vibrationmitiga-tion of structures subjected to environmental and manmadeloads The coupled gyroscopes use two gyroscopic flywheelsspinning in opposing directions to have reverse precessions120579 to eliminate the forces due to the torque existing in thetorsional spring and the damper between gyroscopes Inthis paper the optimal values of the rotor speed torsionalspring and damper are theoretically analyzed and derivedfor a cantilever beam The rotor speed the torsional springand the viscous damping for this gyrostabilizer are so tunedthat this system is more adaptable and has smaller mass thanother conventional control devices with the same ability to beemployed for vibration control
2 Equations of Motion of the Gyros(Coupled)-Beam System for Small Vibration
Here the beam has mass density 120588 cross-sectional area 119860equivalent Youngrsquos modulus 119864 moment of inertia of planearea 119868 and moment of inertia 119868
119905of a tip mass Figure 1 shows
a beam as a vertical cantilever with an end mass 119872119905to
which an additional gyro system (coupled gyroscopes with
massless spring damper frame and gimbal) is attached Thehorizontal displacement of base subjected to a harmonic baseexcitation is 119911 The beam is assumed to be initially straightof length 119871 The horizontal and vertical elastic displacementsat the free end are V and 119906 respectively Due to elasticdeformation of the beam 119904 represents the distance along arc-length of the beam
The kinetic energy of the compound system (gyro-beamsystem) as shown in Figure 1 is
119879 =1
2120588119860int
119871
0
[(V (119904 119905) + (119905))2+ (119904 119905)
2] 119889119904
+1
2119872119905[(V (119905) + (119905))
2+ (119905)
2] +
1
21198681199052
+1
21198981[(V (119905) + (119905))
2+ (119905)
2]
+1
21198982[(V (119905) + (119905))
2+ (119905)
2] + 1198791198921
+ 1198791198922
(1)
where the motion of a gyro can be described by Eulerrsquos angles120579 and 120593 It is not difficult to show that the kinetic energy ofgyroscopes can be expressed as
1198791198921
=1
21198681199001
[2
1+ ( cos 120579
1)2
] +1
21198681199011
(Ω1+ sin 120579
1)2
1198791198922
=1
21198681199002
[2
2+ ( cos 120579
2)2
] +1
21198681199012
(Ω2+ sin 120579
2)2
(2)
The potential energy of the compound system can be writtenas
119881 =1
2119864119868int
119871
0
119902 (119904 119905)2119889119904 minus 120588119860119892int
119871
0
119906 (119904 119905) 119889119904 minus 119872119905119892119906 (119905)
+1
2119896 (1205791minus 1205792)2
minus 1198981119892119906 (119905) minus 119898
2119892119906 (119905)
(3)
Shock and Vibration 3
1205791
Mt
m1
Ω1k c
m2
Ω2
1205792
Figure 2 Coupled gyroscopes via a massless torsional spring with stiffness 119896 and a massless torsional damper with coefficient 119888
The dissipation function119863 takes the form
119863 =1
2119888 (2minus 1)2
(4)
The gyro system consists of two disks which can spin freelyabout their geometric axis via the massless gimbals mountedto the tip mass of the beam The disk masses 119898 of the gyros
at free end are assumed to have reverse angular speeds Ω
and the precessions 120579 and also resisted by a torsional springand damper torque defined by 119896(120579
2minus 1205791) and 119888(
2minus 1)
respectively as shown in Figure 2Equations of the beam and gyro have been expressed in
equations (16) (17) and (18) in [14] as follows respectively
1205881198601198661+ 1198981+ 1198982+ 119872119905+ 1198681199051198662
5+ (120588119860119866
3+ (1198981+ 1198982+ 119872119905) 1198662
4+ 1198681199051198664
5) V2 +
1
41198681199051198666
5V4
+(1198665+
1
2V211986635)
2
[1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
] + (1198665+
1
2V211986635)
2
[1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
V
+ [1205881198601198663+ (1198981+ 1198982+ 119872119905) 1198662
4+ 1198681199051198664
5+
1
21198681199051198666
5V2] VV2
+ [1198641198681198666minus 120588119860119892119866
9minus (1198981+ 1198982+ 119872119905) 1198921198664+ 2119864119868119866
7V2 +
3
41198641198681198668V4] V
+ (1198665+
1
2V211986635)
[[[[[[[[[
[
(1198681199011
minus 1198681199001) (V119866
5+
1
2V2V11986635) 1205791sin 2120579
1
+1198681199001
(VV211986635) (cos 120579
1)2
+1198681199011
(VV211986635) (sin 120579
1)2
+1198681199011Ω1
1205791cos 1205791
]]]]]]]]]
]
+ (1198665+
1
2V211986635)
[[[[[[[[[
[
(1198681199012
minus 1198681199002) (V119866
5+
1
2V2V11986635) 1205792sin 2120579
2
+1198681199002
(VV211986635) (cos 120579
2)2
+1198681199012
(VV211986635) (sin 120579
2)2
+1198681199012Ω2
1205792cos 1205792
]]]]]]]]]
]
= minus (1205881198601198662+ 1198981+ 1198982+ 119872119905)
(5)
1198681199001
1205791minus
1
2(1198681199011
minus 1198681199001) (V119866
5+
1
2V2V11986635)
2
sin 21205791minus 1198681199011Ω1(V1198665+
1
2V2V11986635) cos 120579
1minus 119888 (
2minus 1) minus 119896 (120579
2minus 1205791) = 0 (6a)
4 Shock and Vibration
1198681199002
1205792minus
1
2(1198681199012
minus 1198681199002) (V119866
5+
1
2V2V11986635)
2
sin 21205792minus 1198681199012Ω2(V1198665+
1
2V2V11986635) cos 120579
2+ 119888 (
2minus 1) + 119896 (120579
2minus 1205791) = 0 (6b)
where the constants from 1198661to 1198669are given in Table 2 After the rearrangement (5) becomes
1205721+ 1205722V2 + 120572
3V4
+(1198665+
1
2V211986635)
2
[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
V +
1205722+ 21205723V2 + 119866
3
5(1198665+
1
2V211986635)[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
VV2
+ [1205724+ 1205725V2 + 120572
6V4] V + (119866
5+
1
2V211986635)
[[[[[[[[[
[
(1198681199011
minus 1198681199001) V (119866
5+
1
2V211986635) 1205791sin 2120579
1
+ (1198681199012
minus 1198681199002) V (119866
5+
1
2V211986635) 1205792sin 2120579
2
+1198681199012Ω2
1205792cos 1205792
+1198681199011Ω1
1205791cos 1205791
]]]]]]]]]
]
= minus120574
(7)
in which
1205721= 120588119860119866
1+ 1198981+ 1198982+ 119872119905+ 1198681199051198662
5
1205722= 120588119860119866
3+ (1198981+ 1198982+ 119872119905) 1198662
4+ 1198681199051198664
5
1205723=
1
41198681199051198666
5
1205724= 119864119868119866
6minus 120588119860119892119866
9minus (1198981+ 1198982+ 119872119905) 1198921198664
1205725= 2119864119868119866
7
1205726=
3
41198641198681198668
120574 = 1205881198601198662+ 1198981+ 1198982+ 119872119905
(8)
Neglecting the terms of higher power for small vibrations (V asymp
0) (6a) and (6b) and (7) can be reduced to
1198681199001
1205791minus
1
2(1198681199011
minus 1198681199001) (V1198665)2 sin 2120579
1
minus 1198681199011Ω1(V1198665) cos 120579
1minus 119888 (
2minus 1)
minus 119896 (1205792minus 1205791) = 0
(9a)
1198681199002
1205792minus
1
2(1198681199012
minus 1198681199002) (V1198665)2 sin 2120579
2
minus 1198681199012Ω2(V1198665) cos 120579
2+ 119888 (
2minus 1)
+ 119896 (1205792minus 1205791) = 0
(9b)
1205721
+1198662
5[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
V
+
1205722+ 1198664
5[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
VV2
+ 1205724V + 1198665
[[[[[[
[
(1198681199011
minus 1198681199001) V1198665
1205791sin 2120579
1
+ (1198681199012
minus 1198681199002) V1198665
1205792sin 2120579
2
+1198681199012Ω2
1205792cos 1205792
+1198681199011Ω1
1205791cos 1205791
]]]]]]
]
= minus120574
(10)
3 Optimal Tuning aboutthe Equilibrium Position
The easiest way to approach this problem is from the point ofview of energy We have chosen the kinetic to be zero whenthe tip mass is at the bottom of its swing Setting V asymp 0 and asymp 0 about the equilibrium position (9a) and (9b) and (10)are reduced to
1198681199001
1205791minus 1198681199011Ω1(V1198665) cos 120579
1minus 119888 (
2minus 1) minus 119896 (120579
2
minus 1205791) = 0
(11a)
1198681199002
1205792minus 1198681199012Ω2(V1198665) cos 120579
2+ 119888 (
2minus 1) + 119896 (120579
2
minus 1205791) = 0
(11b)
1205721+ 1198662
5[1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+ 1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
] V + 1205724V + 1198665(1198681199011Ω1
1205791cos 1205791
+ 1198681199012Ω2
1205792cos 1205792) = minus120574
(12)
Shock and Vibration 5
The natural frequencies of gyro and beam can be determinedas follows respectively
1205962
1198921=
119896
1198681199001
1205962
1198922=
119896
1198681199002
(13a)
1205962
119899=
1205724
1205721+ 11986625[1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+ 1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
(13b)
Assume a harmonic disturbing base excitation 119911 = 119911119890119895120596119905 and
the responses may be written as angular frequency 120596
120579 = 120579119890119895120596119905
V = V119890119895120596119905(14)
Therefore (11a) and (11b) and (12) can be rewritten in thematrix form
1205791
[[[
[
11989512059611986651198681199011Ω1cos 1205791
minus11986811990011205962+ 119895119888120596 + 119896
minus119895119888120596 minus 119896
]]]
]
+ 1205792
[[[
[
11989512059611986651198681199012Ω2cos 1205792
minus119895119888120596 minus 119896
minus11986811990021205962+ 119895119888120596 + 119896
]]]
]
+ V
[[[[[[[[[[
[
minus1205962
1205721
+1198662
5[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
+ 1205724
minus1198951205961198681199011Ω11198665cos 1205791
minus1198951205961198681199012Ω21198665cos 1205792
]]]]]]]]]]
]
=[[[
[
1205962120574119911
0
0
]]]
]
(15)
The responses of gyro-1 and gyro-2must become equal (|1205791| =
|1205792|) when 119868
1199001= 1198681199002 1198681199011
= 1198681199012 andΩ
1= minusΩ2 Hence solving
these equations yields
V =
1205962120574119911 [(minus119868
1199001205962+ 119895119888120596 + 119896)
2
minus (minus119895119888120596 minus 119896)2
]
119909
(16)
1205791
=1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) [(minus119868
1199001205962+ 119895119888120596 + 119896) minus (minus119895119888120596 minus 119896)]
119909
(17a)
1205792
=minus1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) [(minus119868
1199001205962+ 119895119888120596 + 119896) minus (minus119895119888120596 minus 119896)]
119909
(17b)
where 119909 = (1198951205961198665119868119901Ω cos 120579)2[4(119895119888120596+119896)minus2119868
1199001205962]+[minus120596
21205721+
21198662
5[119868119900(cos 120579)2+119868
119901(sin 120579)
2]+1205724][(minus1198681199001205962+119895119888120596+119896)
2minus(minus119895119888120596minus
119896)2]
31 The Undamped Gyroscopic Vibration Absorber By elimi-nating terms of damping (17b) then yields
1205792=
minus1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) (minus119868
1199001205962+ 2119896)
2 (1198951205961198665119868119901Ω cos 120579)
2
(minus1198681199001205962 + 2119896) + [minus1205962 120572
1+ 211986625[119868119900(cos 120579)2 + 119868
119901(sin 120579)
2] + 120572
4] (minus1198681199001205962) (minus119868
1199001205962 + 2119896)
(18)
6 Shock and Vibration120596
max
5069450694506945069450694506945069550695506955069550695
minus1 minus05 0 05 1 15minus15
120579 (rad)
(a)
050 1 15minus1 minus05minus15
120579 (rad)
120579co
s(120579
)
minus05
minus04
minus03
minus02
minus01
00102030405
(b)
Figure 3 The theoretical limit curves natural frequency rads (a) gyro response rad (b)
When 1205962= 1205962
119899and 120579 = 120579
2= 120579max for equation of a stable
motion at120596 le 120596119899except for1205962 = 119896119868
0= 1205962
119892 (18) corresponds
to
10038161003816100381610038161003816120579max
10038161003816100381610038161003816=
120574119911120596119899
21198665119868119901Ω cos 120579max
(19)
Equation (19) can be modified into the following forms
120579max cos 120579max = plusmn120596119899120574119911
21198681199011198665Ω
120596max = plusmn21198681199011198665Ω120579max cos 120579max
120574119911
(20)
Theminimum disk speedΩmin should be chosen carefully toeliminate the instability at 120596 le 120596
119899 Suppose that a minimum
disk speed Ωmin is required for a stable motion Then thistransforms to a minimum disk speed equation
Ωmin = plusmn120596119899120574119911
21198681199011198665120579max cos 120579max
(21)
Figure 3 shows that the theoretical limit of the amplitude atresonance is one when absolute value of the precession 120579maxapproaches 086 rad Suppose that |120579max cos 120579max| = 05611
and |120579max| = 086 rad for minus1205872 le 120579 le 1205872 Equation (21) maybe rewritten as
Ωmin = 08911120596119899120574119911
1198681199011198665
(22)
where (13b) is then
120596119899= radic
1205724
1205721+ 211986625[0426119868
119900+ 0574119868
119901] (23)
For the minimum tip mass displacement |V| = 0 theexcitation frequency should be 120596
2= 2119896119868
119900obtained from
(16)
5 10 15 20 25 300Forcing frequency 120596 (rads)
0002004006008
01012014016018
02
Abs
disp
lace
men
t|| (
m)
Figure 4 The theoretical frequency response curves of tip of beamwithΩmin = 15850 rpm and 119911 = 005m for (dotted) 119896 = 0 and 119888 = 0for (dash-dot) 119896 = 119868
11990012059622 and 119888 = 0 and for (solid) 119896 = 119868
11990012059622 and
119888 = 11986811990012059624120596119892
32 The Damped Gyroscopic Vibration Absorber With thehelp of (16) in order to reach the minimum tip massdisplacement |V| = 0 it can be rewritten as
1205962120574119911 [(minus119868
1199001205962+ 119895119888120596 + 119896)
2
minus (minus119895119888120596 minus 119896)2
] = 0 (24)
Then optimal damping can be obtained
119888 = plusmn1198681199001205962minus 2119896
2120596 (25)
Set 119896 = 1198681199001205962
1198992 and 120596 = 120596
119892= radic119896119868
119900to eliminate the
instability due to the natural frequency of the added gyro-spring system Equation (25) is then
119888opt =1198681199001205962
119899
4120596119892
(26)
Figure 4 shows the possible maxima and minima of thetheoretical frequency response at the tip of beam
4 Numerical Simulations
In the following calculations a rectangle-cross beam isconsidered with thickness ℎ = 100mm width 119887 = 150mm
Shock and Vibration 7
Table 1 Physical properties of the system
Symbol Numerical values Description119864 210 times 109Nm2 Youngrsquos modulusℎ 100mm Beam thickness119887 150mm Beam width119871 5m Length of the beam120588 7850 kgm3 Density of the beam119872119905
2000 kg Tip mass119868119905119872119905
02m2 Ratio of tip mass moment of inertia119868119905
400 kgsdotm2 Tip mass moment of inertia119868 125 times 10minus5m4 Geometrical moment of inertia of beam119892 981ms2 Gravitational acceleration119860 = 119887 sdot ℎ 0015m2 Area of cross section of beam119888 119868
1199001205962
1198994120596119892Nsdotmsdotsrad Damping coefficient
119896 119868o1205962
1198992Nsdotmrad Stiffness of torsion spring
119898 = 1198981= 1198982
50 kg Disk mass of gyroscope119903 = 1199031= 1199032
02m Radius of disk119868119901= 1198681199011
= 1198681199012
= 119898 sdot 11990322 1 kgsdotm2 Rotary inertia of disk
119868119900= 1198681199001
= 1198681199002
= 1198681199012 05 kgsdotm2 Mass moment of inertia of disk
Ω = Ω1= minusΩ
20ndash30000 rpm Rotating speed of disk
Table 2 Constants of the equation of motion of the gyro-beam system in SI units
1198661
1198662
1198663
1198664
1198665
1198666
1198667
1198668
1198669
11338 18169 00552 02467 03142 00244 60087119890 minus 4 29652119890 minus 5 03669
length 119871 = 5m density 120588 = 7850 kgm3 and Youngrsquosmodulus along the axial direction 119864 = 210 times 10
9Nm2Equations may be solved by using a Matlab software toolthat involves the fourth-order Runge-Kutta method Theparameters of the numerical example are given in Table 1 Inorder to identify the dynamical behavior frequency responseis simulated with the time step size of 01 s and zero initialconditions
41 The Undamped Gyroscopic Vibration Absorber In thecase of the base excitation with 119911 = 005 cos(120596
119899119905) Figure 5
shows the rotational speed curve for case 119896 = 1198681199001205962
1198992 It can
be seen that tip response of beam is effectively reduced overminimum rotational speed (Ωmin = 15850 rpm)
Figure 6 represents the frequency response curve of thebeam and gyro for cases Ωmin = 15850 rpm and 119896 = 119868
1199001205962
1198992
It presented that the displacement response is effectivelyreduced before the case 120596 = 120596
119899 But resonance occurs when
120596 = 120596119899 However over the resonance frequency reduction
of the vibration continues to reach the optimum scale atminimum rotational speed
42 The Damped Gyroscopic Vibration Absorber In the caseof the base excitation with 119911 = 005 cos(120596
119899119905) Figure 7 shows
the rotational speed curve for cases 119896 = 1198681199001205962
1198992 and 119888opt =
1198681199001205962
1198994120596119892The response of the beam is effectively reduced and
effect reaches low rotational speeds compared to undamped
gyrosWhen damping coefficient is zero the response of gyrocan jump into unstable zone at resonance as seen in Figure 5
It can be seen that the case of 119888opt = 1198681199001205962
1198994120596119892Nsdotmsdotsrad
is an optimumdamping coefficient which effectively reducedthe response of the beam at resonance shown in Figure 8When optimum damping coefficient is chosen the frequencyresponse of the beam can improve compared to Figures 5 and6 therefore cases 119896 = 119868
1199001205962
1198992 and 119888opt = 119868
1199001205962
1198994120596119892are chosen
to reach the optimum scale for minimum rotational speedAs a result it is shown that optimum values of the stiffnessand damping which connect two gyroscopic systems have asignificant effect on the the performance of the gyroscopicvibration absorberOn the other hand the performance of thesystem is improved as we increase the rotor speed as shownin Figure 9
5 Conclusions
The optimal parameters of the rotor speed the springand damper for the minimum responses of the gyroscopesand beam are studied This paper provides some analyticalequations to investigate these optimal parameters of a gyro-beam system The effectiveness is presented by computersimulations and the numerical results agree with the analyt-ical solutions From the consistency of the present study thefollowing conclusions are found
(1) Up to a certain rotor speed there is no mitigation inthe vibration of beam at free end But beyond this
8 Shock and Vibration
05
1
15
2
25
3D
ispla
cem
ent (
m)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
01020304050607080
05 1 15 2 25 30Ω (rpm)
(b)
Figure 5 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with the base excitation
of 119911 = 005 cos(120596119899119905)
0010203040506070809
1
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
5
10
15
20
25
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(b)
Figure 6 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with
the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
Disp
lace
men
t (m
)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
02468
101214161820
05 1 15 2 25 30Ω (rpm)
(b)
Figure 7 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892=
09Nmsrad with the base excitation of 119911 = 005 cos(120596119899119905)
as we increase the rotor speed the gyro system hassignificantly reduced the vibration of beam Hencethis value is selected as the minimum rotor speed(Ωmin = 08911(120596
1198991205741199111198681199011198665)) The rotary inertia of
the rotor can be reduced by increasing rotor speedwhich is proportional to the mass of disk Thereforethe weight and volume of the system can be reduced
(2) There exist optimum parameters for the spring anddamper for minimum response of the beam Thestiffness of the spring and damper affect the per-formance of gyroscopes The gyroscopes can jumpinto unstable zone when the stiffness is not takenproperly Optimum spring and damper parametersfor minimum response are obtained from frequency
Shock and Vibration 9
0
005
01
015
02
025
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
0
2
4
6
8
10
(b)
Figure 8 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and
119888opt = 1198681199001205962
1198994120596119892= 09Nmsrad with the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
3
Disp
lace
men
t (m
)
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
2
4
6
8
10
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(b)
Figure 9 Frequency response curves for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892
= 09Nmsrad tip response of beam (a) gyroresponse (b) for (o) Ω = 0 rpm (+) Ω = 7500 rpm and (◻)Ω = 10000 rpm with the base excitation of 119911 = 005 cos(120596119905)
equation of beam The minimum displacement hav-ing optimum spring coefficient should be chosen foroptimal damper at the resonance frequency Thensetting 120596 = 120596
119892to eliminate the instability due
to the natural frequency of the added gyro-springsystem results in optimal damping Coupling thegyroscopes with the optimal spring (119896 = 119868
1199001205962
1198992) and
damper (119888 = 1198681199001205962
1198994120596119892) is a practical and effective
approach to mitigate the undesired motions of beamand gyroscopes
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This study was mainly supported by the Scientific and Tech-nological Research Council of Turkey (TUBITAK) underGrant no 114M760
References
[1] T K Datta ldquoA state-of the-art review on active control ofstructuresrdquo ISET Journal of Earthquake Technology Paper No430 vol 40 no 1 pp 1ndash17 2003
[2] G W Housner L A Bergman T K Caughey et al ldquoStruc-tural control past present and futurerdquo Journal of EngineeringMechanics vol 123 no 9 pp 897ndash971 1997
[3] T T Soong Active Structural Control Theory and PracticeLongman Scientific and Technical New York NY USA 1990
[4] B F Spencer Jr and M K Sain ldquoControlling buildings a newfrontier in feedbackrdquo IEEEControl SystemsMagazine vol 17 no6 pp 19ndash35 1997
[5] T Kobori ldquoPast present and future in seismic response controlin civil engineering structuresrdquo in Proceedings of the 3rd WorldConference on Structural Control pp 9ndash14 Wiley New YorkNY USA 2003
[6] T T Soong and B F Spencer Jr ldquoSupplemental energy dissi-pation state-of-the-art and state-of-the-practicerdquo EngineeringStructures vol 24 no 3 pp 243ndash259 2002
[7] B F Spencer Jr ldquoCivil engineering applications of smartdamping technologyrdquo in Proceedings of the 5th International
10 Shock and Vibration
Conference on Vibration Engineering pp 771ndash782 NanjingChina 2002
[8] T T Soong andG F DargushPassive EnergyDissipation Systemin Structural Engineering Wiley New York NY USA 1997
[9] N C Townsend A J Murphy and R A Shenoi ldquoA new activegyrostabiliser system for ride control of marine vehiclesrdquoOceanEngineering vol 34 no 11-12 pp 1607ndash1617 2007
[10] BThornton TUra YNose and S Turnock ldquoInternal actuationof underwater robots using control moment gyrosrdquo in Proceed-ings of the IEEE OCEANS Conference vol 1 pp 591ndash598 BrestFrance June 2005
[11] T Perez and P Steinmann ldquoAnalysis of ship roll gyrostabilisercontrolrdquo in Proceedings of the 8th IFAC Conference on Manoeu-vring and Control of Marine Craft pp 310ndash315 Guaruja BrazilSeptember 2009
[12] E O Schlick ldquoDevice for minimising the oscillatory move-ments of shipsrdquo Patent US769 493 1904
[13] E O Schlick ldquoThe gyroscopic effect of flywheels on board shiprdquoTransactions of the Institute of Naval Architects vol 23 pp 117ndash134 1904
[14] F Unker andO Cuvalcı ldquoNonlinearmotion control of a columnusing a coupled gyroscoperdquo ProcediamdashSocial and BehavioralSciences vol 195 pp 2242ndash2252 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 3
1205791
Mt
m1
Ω1k c
m2
Ω2
1205792
Figure 2 Coupled gyroscopes via a massless torsional spring with stiffness 119896 and a massless torsional damper with coefficient 119888
The dissipation function119863 takes the form
119863 =1
2119888 (2minus 1)2
(4)
The gyro system consists of two disks which can spin freelyabout their geometric axis via the massless gimbals mountedto the tip mass of the beam The disk masses 119898 of the gyros
at free end are assumed to have reverse angular speeds Ω
and the precessions 120579 and also resisted by a torsional springand damper torque defined by 119896(120579
2minus 1205791) and 119888(
2minus 1)
respectively as shown in Figure 2Equations of the beam and gyro have been expressed in
equations (16) (17) and (18) in [14] as follows respectively
1205881198601198661+ 1198981+ 1198982+ 119872119905+ 1198681199051198662
5+ (120588119860119866
3+ (1198981+ 1198982+ 119872119905) 1198662
4+ 1198681199051198664
5) V2 +
1
41198681199051198666
5V4
+(1198665+
1
2V211986635)
2
[1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
] + (1198665+
1
2V211986635)
2
[1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
V
+ [1205881198601198663+ (1198981+ 1198982+ 119872119905) 1198662
4+ 1198681199051198664
5+
1
21198681199051198666
5V2] VV2
+ [1198641198681198666minus 120588119860119892119866
9minus (1198981+ 1198982+ 119872119905) 1198921198664+ 2119864119868119866
7V2 +
3
41198641198681198668V4] V
+ (1198665+
1
2V211986635)
[[[[[[[[[
[
(1198681199011
minus 1198681199001) (V119866
5+
1
2V2V11986635) 1205791sin 2120579
1
+1198681199001
(VV211986635) (cos 120579
1)2
+1198681199011
(VV211986635) (sin 120579
1)2
+1198681199011Ω1
1205791cos 1205791
]]]]]]]]]
]
+ (1198665+
1
2V211986635)
[[[[[[[[[
[
(1198681199012
minus 1198681199002) (V119866
5+
1
2V2V11986635) 1205792sin 2120579
2
+1198681199002
(VV211986635) (cos 120579
2)2
+1198681199012
(VV211986635) (sin 120579
2)2
+1198681199012Ω2
1205792cos 1205792
]]]]]]]]]
]
= minus (1205881198601198662+ 1198981+ 1198982+ 119872119905)
(5)
1198681199001
1205791minus
1
2(1198681199011
minus 1198681199001) (V119866
5+
1
2V2V11986635)
2
sin 21205791minus 1198681199011Ω1(V1198665+
1
2V2V11986635) cos 120579
1minus 119888 (
2minus 1) minus 119896 (120579
2minus 1205791) = 0 (6a)
4 Shock and Vibration
1198681199002
1205792minus
1
2(1198681199012
minus 1198681199002) (V119866
5+
1
2V2V11986635)
2
sin 21205792minus 1198681199012Ω2(V1198665+
1
2V2V11986635) cos 120579
2+ 119888 (
2minus 1) + 119896 (120579
2minus 1205791) = 0 (6b)
where the constants from 1198661to 1198669are given in Table 2 After the rearrangement (5) becomes
1205721+ 1205722V2 + 120572
3V4
+(1198665+
1
2V211986635)
2
[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
V +
1205722+ 21205723V2 + 119866
3
5(1198665+
1
2V211986635)[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
VV2
+ [1205724+ 1205725V2 + 120572
6V4] V + (119866
5+
1
2V211986635)
[[[[[[[[[
[
(1198681199011
minus 1198681199001) V (119866
5+
1
2V211986635) 1205791sin 2120579
1
+ (1198681199012
minus 1198681199002) V (119866
5+
1
2V211986635) 1205792sin 2120579
2
+1198681199012Ω2
1205792cos 1205792
+1198681199011Ω1
1205791cos 1205791
]]]]]]]]]
]
= minus120574
(7)
in which
1205721= 120588119860119866
1+ 1198981+ 1198982+ 119872119905+ 1198681199051198662
5
1205722= 120588119860119866
3+ (1198981+ 1198982+ 119872119905) 1198662
4+ 1198681199051198664
5
1205723=
1
41198681199051198666
5
1205724= 119864119868119866
6minus 120588119860119892119866
9minus (1198981+ 1198982+ 119872119905) 1198921198664
1205725= 2119864119868119866
7
1205726=
3
41198641198681198668
120574 = 1205881198601198662+ 1198981+ 1198982+ 119872119905
(8)
Neglecting the terms of higher power for small vibrations (V asymp
0) (6a) and (6b) and (7) can be reduced to
1198681199001
1205791minus
1
2(1198681199011
minus 1198681199001) (V1198665)2 sin 2120579
1
minus 1198681199011Ω1(V1198665) cos 120579
1minus 119888 (
2minus 1)
minus 119896 (1205792minus 1205791) = 0
(9a)
1198681199002
1205792minus
1
2(1198681199012
minus 1198681199002) (V1198665)2 sin 2120579
2
minus 1198681199012Ω2(V1198665) cos 120579
2+ 119888 (
2minus 1)
+ 119896 (1205792minus 1205791) = 0
(9b)
1205721
+1198662
5[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
V
+
1205722+ 1198664
5[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
VV2
+ 1205724V + 1198665
[[[[[[
[
(1198681199011
minus 1198681199001) V1198665
1205791sin 2120579
1
+ (1198681199012
minus 1198681199002) V1198665
1205792sin 2120579
2
+1198681199012Ω2
1205792cos 1205792
+1198681199011Ω1
1205791cos 1205791
]]]]]]
]
= minus120574
(10)
3 Optimal Tuning aboutthe Equilibrium Position
The easiest way to approach this problem is from the point ofview of energy We have chosen the kinetic to be zero whenthe tip mass is at the bottom of its swing Setting V asymp 0 and asymp 0 about the equilibrium position (9a) and (9b) and (10)are reduced to
1198681199001
1205791minus 1198681199011Ω1(V1198665) cos 120579
1minus 119888 (
2minus 1) minus 119896 (120579
2
minus 1205791) = 0
(11a)
1198681199002
1205792minus 1198681199012Ω2(V1198665) cos 120579
2+ 119888 (
2minus 1) + 119896 (120579
2
minus 1205791) = 0
(11b)
1205721+ 1198662
5[1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+ 1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
] V + 1205724V + 1198665(1198681199011Ω1
1205791cos 1205791
+ 1198681199012Ω2
1205792cos 1205792) = minus120574
(12)
Shock and Vibration 5
The natural frequencies of gyro and beam can be determinedas follows respectively
1205962
1198921=
119896
1198681199001
1205962
1198922=
119896
1198681199002
(13a)
1205962
119899=
1205724
1205721+ 11986625[1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+ 1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
(13b)
Assume a harmonic disturbing base excitation 119911 = 119911119890119895120596119905 and
the responses may be written as angular frequency 120596
120579 = 120579119890119895120596119905
V = V119890119895120596119905(14)
Therefore (11a) and (11b) and (12) can be rewritten in thematrix form
1205791
[[[
[
11989512059611986651198681199011Ω1cos 1205791
minus11986811990011205962+ 119895119888120596 + 119896
minus119895119888120596 minus 119896
]]]
]
+ 1205792
[[[
[
11989512059611986651198681199012Ω2cos 1205792
minus119895119888120596 minus 119896
minus11986811990021205962+ 119895119888120596 + 119896
]]]
]
+ V
[[[[[[[[[[
[
minus1205962
1205721
+1198662
5[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
+ 1205724
minus1198951205961198681199011Ω11198665cos 1205791
minus1198951205961198681199012Ω21198665cos 1205792
]]]]]]]]]]
]
=[[[
[
1205962120574119911
0
0
]]]
]
(15)
The responses of gyro-1 and gyro-2must become equal (|1205791| =
|1205792|) when 119868
1199001= 1198681199002 1198681199011
= 1198681199012 andΩ
1= minusΩ2 Hence solving
these equations yields
V =
1205962120574119911 [(minus119868
1199001205962+ 119895119888120596 + 119896)
2
minus (minus119895119888120596 minus 119896)2
]
119909
(16)
1205791
=1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) [(minus119868
1199001205962+ 119895119888120596 + 119896) minus (minus119895119888120596 minus 119896)]
119909
(17a)
1205792
=minus1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) [(minus119868
1199001205962+ 119895119888120596 + 119896) minus (minus119895119888120596 minus 119896)]
119909
(17b)
where 119909 = (1198951205961198665119868119901Ω cos 120579)2[4(119895119888120596+119896)minus2119868
1199001205962]+[minus120596
21205721+
21198662
5[119868119900(cos 120579)2+119868
119901(sin 120579)
2]+1205724][(minus1198681199001205962+119895119888120596+119896)
2minus(minus119895119888120596minus
119896)2]
31 The Undamped Gyroscopic Vibration Absorber By elimi-nating terms of damping (17b) then yields
1205792=
minus1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) (minus119868
1199001205962+ 2119896)
2 (1198951205961198665119868119901Ω cos 120579)
2
(minus1198681199001205962 + 2119896) + [minus1205962 120572
1+ 211986625[119868119900(cos 120579)2 + 119868
119901(sin 120579)
2] + 120572
4] (minus1198681199001205962) (minus119868
1199001205962 + 2119896)
(18)
6 Shock and Vibration120596
max
5069450694506945069450694506945069550695506955069550695
minus1 minus05 0 05 1 15minus15
120579 (rad)
(a)
050 1 15minus1 minus05minus15
120579 (rad)
120579co
s(120579
)
minus05
minus04
minus03
minus02
minus01
00102030405
(b)
Figure 3 The theoretical limit curves natural frequency rads (a) gyro response rad (b)
When 1205962= 1205962
119899and 120579 = 120579
2= 120579max for equation of a stable
motion at120596 le 120596119899except for1205962 = 119896119868
0= 1205962
119892 (18) corresponds
to
10038161003816100381610038161003816120579max
10038161003816100381610038161003816=
120574119911120596119899
21198665119868119901Ω cos 120579max
(19)
Equation (19) can be modified into the following forms
120579max cos 120579max = plusmn120596119899120574119911
21198681199011198665Ω
120596max = plusmn21198681199011198665Ω120579max cos 120579max
120574119911
(20)
Theminimum disk speedΩmin should be chosen carefully toeliminate the instability at 120596 le 120596
119899 Suppose that a minimum
disk speed Ωmin is required for a stable motion Then thistransforms to a minimum disk speed equation
Ωmin = plusmn120596119899120574119911
21198681199011198665120579max cos 120579max
(21)
Figure 3 shows that the theoretical limit of the amplitude atresonance is one when absolute value of the precession 120579maxapproaches 086 rad Suppose that |120579max cos 120579max| = 05611
and |120579max| = 086 rad for minus1205872 le 120579 le 1205872 Equation (21) maybe rewritten as
Ωmin = 08911120596119899120574119911
1198681199011198665
(22)
where (13b) is then
120596119899= radic
1205724
1205721+ 211986625[0426119868
119900+ 0574119868
119901] (23)
For the minimum tip mass displacement |V| = 0 theexcitation frequency should be 120596
2= 2119896119868
119900obtained from
(16)
5 10 15 20 25 300Forcing frequency 120596 (rads)
0002004006008
01012014016018
02
Abs
disp
lace
men
t|| (
m)
Figure 4 The theoretical frequency response curves of tip of beamwithΩmin = 15850 rpm and 119911 = 005m for (dotted) 119896 = 0 and 119888 = 0for (dash-dot) 119896 = 119868
11990012059622 and 119888 = 0 and for (solid) 119896 = 119868
11990012059622 and
119888 = 11986811990012059624120596119892
32 The Damped Gyroscopic Vibration Absorber With thehelp of (16) in order to reach the minimum tip massdisplacement |V| = 0 it can be rewritten as
1205962120574119911 [(minus119868
1199001205962+ 119895119888120596 + 119896)
2
minus (minus119895119888120596 minus 119896)2
] = 0 (24)
Then optimal damping can be obtained
119888 = plusmn1198681199001205962minus 2119896
2120596 (25)
Set 119896 = 1198681199001205962
1198992 and 120596 = 120596
119892= radic119896119868
119900to eliminate the
instability due to the natural frequency of the added gyro-spring system Equation (25) is then
119888opt =1198681199001205962
119899
4120596119892
(26)
Figure 4 shows the possible maxima and minima of thetheoretical frequency response at the tip of beam
4 Numerical Simulations
In the following calculations a rectangle-cross beam isconsidered with thickness ℎ = 100mm width 119887 = 150mm
Shock and Vibration 7
Table 1 Physical properties of the system
Symbol Numerical values Description119864 210 times 109Nm2 Youngrsquos modulusℎ 100mm Beam thickness119887 150mm Beam width119871 5m Length of the beam120588 7850 kgm3 Density of the beam119872119905
2000 kg Tip mass119868119905119872119905
02m2 Ratio of tip mass moment of inertia119868119905
400 kgsdotm2 Tip mass moment of inertia119868 125 times 10minus5m4 Geometrical moment of inertia of beam119892 981ms2 Gravitational acceleration119860 = 119887 sdot ℎ 0015m2 Area of cross section of beam119888 119868
1199001205962
1198994120596119892Nsdotmsdotsrad Damping coefficient
119896 119868o1205962
1198992Nsdotmrad Stiffness of torsion spring
119898 = 1198981= 1198982
50 kg Disk mass of gyroscope119903 = 1199031= 1199032
02m Radius of disk119868119901= 1198681199011
= 1198681199012
= 119898 sdot 11990322 1 kgsdotm2 Rotary inertia of disk
119868119900= 1198681199001
= 1198681199002
= 1198681199012 05 kgsdotm2 Mass moment of inertia of disk
Ω = Ω1= minusΩ
20ndash30000 rpm Rotating speed of disk
Table 2 Constants of the equation of motion of the gyro-beam system in SI units
1198661
1198662
1198663
1198664
1198665
1198666
1198667
1198668
1198669
11338 18169 00552 02467 03142 00244 60087119890 minus 4 29652119890 minus 5 03669
length 119871 = 5m density 120588 = 7850 kgm3 and Youngrsquosmodulus along the axial direction 119864 = 210 times 10
9Nm2Equations may be solved by using a Matlab software toolthat involves the fourth-order Runge-Kutta method Theparameters of the numerical example are given in Table 1 Inorder to identify the dynamical behavior frequency responseis simulated with the time step size of 01 s and zero initialconditions
41 The Undamped Gyroscopic Vibration Absorber In thecase of the base excitation with 119911 = 005 cos(120596
119899119905) Figure 5
shows the rotational speed curve for case 119896 = 1198681199001205962
1198992 It can
be seen that tip response of beam is effectively reduced overminimum rotational speed (Ωmin = 15850 rpm)
Figure 6 represents the frequency response curve of thebeam and gyro for cases Ωmin = 15850 rpm and 119896 = 119868
1199001205962
1198992
It presented that the displacement response is effectivelyreduced before the case 120596 = 120596
119899 But resonance occurs when
120596 = 120596119899 However over the resonance frequency reduction
of the vibration continues to reach the optimum scale atminimum rotational speed
42 The Damped Gyroscopic Vibration Absorber In the caseof the base excitation with 119911 = 005 cos(120596
119899119905) Figure 7 shows
the rotational speed curve for cases 119896 = 1198681199001205962
1198992 and 119888opt =
1198681199001205962
1198994120596119892The response of the beam is effectively reduced and
effect reaches low rotational speeds compared to undamped
gyrosWhen damping coefficient is zero the response of gyrocan jump into unstable zone at resonance as seen in Figure 5
It can be seen that the case of 119888opt = 1198681199001205962
1198994120596119892Nsdotmsdotsrad
is an optimumdamping coefficient which effectively reducedthe response of the beam at resonance shown in Figure 8When optimum damping coefficient is chosen the frequencyresponse of the beam can improve compared to Figures 5 and6 therefore cases 119896 = 119868
1199001205962
1198992 and 119888opt = 119868
1199001205962
1198994120596119892are chosen
to reach the optimum scale for minimum rotational speedAs a result it is shown that optimum values of the stiffnessand damping which connect two gyroscopic systems have asignificant effect on the the performance of the gyroscopicvibration absorberOn the other hand the performance of thesystem is improved as we increase the rotor speed as shownin Figure 9
5 Conclusions
The optimal parameters of the rotor speed the springand damper for the minimum responses of the gyroscopesand beam are studied This paper provides some analyticalequations to investigate these optimal parameters of a gyro-beam system The effectiveness is presented by computersimulations and the numerical results agree with the analyt-ical solutions From the consistency of the present study thefollowing conclusions are found
(1) Up to a certain rotor speed there is no mitigation inthe vibration of beam at free end But beyond this
8 Shock and Vibration
05
1
15
2
25
3D
ispla
cem
ent (
m)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
01020304050607080
05 1 15 2 25 30Ω (rpm)
(b)
Figure 5 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with the base excitation
of 119911 = 005 cos(120596119899119905)
0010203040506070809
1
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
5
10
15
20
25
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(b)
Figure 6 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with
the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
Disp
lace
men
t (m
)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
02468
101214161820
05 1 15 2 25 30Ω (rpm)
(b)
Figure 7 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892=
09Nmsrad with the base excitation of 119911 = 005 cos(120596119899119905)
as we increase the rotor speed the gyro system hassignificantly reduced the vibration of beam Hencethis value is selected as the minimum rotor speed(Ωmin = 08911(120596
1198991205741199111198681199011198665)) The rotary inertia of
the rotor can be reduced by increasing rotor speedwhich is proportional to the mass of disk Thereforethe weight and volume of the system can be reduced
(2) There exist optimum parameters for the spring anddamper for minimum response of the beam Thestiffness of the spring and damper affect the per-formance of gyroscopes The gyroscopes can jumpinto unstable zone when the stiffness is not takenproperly Optimum spring and damper parametersfor minimum response are obtained from frequency
Shock and Vibration 9
0
005
01
015
02
025
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
0
2
4
6
8
10
(b)
Figure 8 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and
119888opt = 1198681199001205962
1198994120596119892= 09Nmsrad with the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
3
Disp
lace
men
t (m
)
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
2
4
6
8
10
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(b)
Figure 9 Frequency response curves for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892
= 09Nmsrad tip response of beam (a) gyroresponse (b) for (o) Ω = 0 rpm (+) Ω = 7500 rpm and (◻)Ω = 10000 rpm with the base excitation of 119911 = 005 cos(120596119905)
equation of beam The minimum displacement hav-ing optimum spring coefficient should be chosen foroptimal damper at the resonance frequency Thensetting 120596 = 120596
119892to eliminate the instability due
to the natural frequency of the added gyro-springsystem results in optimal damping Coupling thegyroscopes with the optimal spring (119896 = 119868
1199001205962
1198992) and
damper (119888 = 1198681199001205962
1198994120596119892) is a practical and effective
approach to mitigate the undesired motions of beamand gyroscopes
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This study was mainly supported by the Scientific and Tech-nological Research Council of Turkey (TUBITAK) underGrant no 114M760
References
[1] T K Datta ldquoA state-of the-art review on active control ofstructuresrdquo ISET Journal of Earthquake Technology Paper No430 vol 40 no 1 pp 1ndash17 2003
[2] G W Housner L A Bergman T K Caughey et al ldquoStruc-tural control past present and futurerdquo Journal of EngineeringMechanics vol 123 no 9 pp 897ndash971 1997
[3] T T Soong Active Structural Control Theory and PracticeLongman Scientific and Technical New York NY USA 1990
[4] B F Spencer Jr and M K Sain ldquoControlling buildings a newfrontier in feedbackrdquo IEEEControl SystemsMagazine vol 17 no6 pp 19ndash35 1997
[5] T Kobori ldquoPast present and future in seismic response controlin civil engineering structuresrdquo in Proceedings of the 3rd WorldConference on Structural Control pp 9ndash14 Wiley New YorkNY USA 2003
[6] T T Soong and B F Spencer Jr ldquoSupplemental energy dissi-pation state-of-the-art and state-of-the-practicerdquo EngineeringStructures vol 24 no 3 pp 243ndash259 2002
[7] B F Spencer Jr ldquoCivil engineering applications of smartdamping technologyrdquo in Proceedings of the 5th International
10 Shock and Vibration
Conference on Vibration Engineering pp 771ndash782 NanjingChina 2002
[8] T T Soong andG F DargushPassive EnergyDissipation Systemin Structural Engineering Wiley New York NY USA 1997
[9] N C Townsend A J Murphy and R A Shenoi ldquoA new activegyrostabiliser system for ride control of marine vehiclesrdquoOceanEngineering vol 34 no 11-12 pp 1607ndash1617 2007
[10] BThornton TUra YNose and S Turnock ldquoInternal actuationof underwater robots using control moment gyrosrdquo in Proceed-ings of the IEEE OCEANS Conference vol 1 pp 591ndash598 BrestFrance June 2005
[11] T Perez and P Steinmann ldquoAnalysis of ship roll gyrostabilisercontrolrdquo in Proceedings of the 8th IFAC Conference on Manoeu-vring and Control of Marine Craft pp 310ndash315 Guaruja BrazilSeptember 2009
[12] E O Schlick ldquoDevice for minimising the oscillatory move-ments of shipsrdquo Patent US769 493 1904
[13] E O Schlick ldquoThe gyroscopic effect of flywheels on board shiprdquoTransactions of the Institute of Naval Architects vol 23 pp 117ndash134 1904
[14] F Unker andO Cuvalcı ldquoNonlinearmotion control of a columnusing a coupled gyroscoperdquo ProcediamdashSocial and BehavioralSciences vol 195 pp 2242ndash2252 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Shock and Vibration
1198681199002
1205792minus
1
2(1198681199012
minus 1198681199002) (V119866
5+
1
2V2V11986635)
2
sin 21205792minus 1198681199012Ω2(V1198665+
1
2V2V11986635) cos 120579
2+ 119888 (
2minus 1) + 119896 (120579
2minus 1205791) = 0 (6b)
where the constants from 1198661to 1198669are given in Table 2 After the rearrangement (5) becomes
1205721+ 1205722V2 + 120572
3V4
+(1198665+
1
2V211986635)
2
[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
V +
1205722+ 21205723V2 + 119866
3
5(1198665+
1
2V211986635)[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
VV2
+ [1205724+ 1205725V2 + 120572
6V4] V + (119866
5+
1
2V211986635)
[[[[[[[[[
[
(1198681199011
minus 1198681199001) V (119866
5+
1
2V211986635) 1205791sin 2120579
1
+ (1198681199012
minus 1198681199002) V (119866
5+
1
2V211986635) 1205792sin 2120579
2
+1198681199012Ω2
1205792cos 1205792
+1198681199011Ω1
1205791cos 1205791
]]]]]]]]]
]
= minus120574
(7)
in which
1205721= 120588119860119866
1+ 1198981+ 1198982+ 119872119905+ 1198681199051198662
5
1205722= 120588119860119866
3+ (1198981+ 1198982+ 119872119905) 1198662
4+ 1198681199051198664
5
1205723=
1
41198681199051198666
5
1205724= 119864119868119866
6minus 120588119860119892119866
9minus (1198981+ 1198982+ 119872119905) 1198921198664
1205725= 2119864119868119866
7
1205726=
3
41198641198681198668
120574 = 1205881198601198662+ 1198981+ 1198982+ 119872119905
(8)
Neglecting the terms of higher power for small vibrations (V asymp
0) (6a) and (6b) and (7) can be reduced to
1198681199001
1205791minus
1
2(1198681199011
minus 1198681199001) (V1198665)2 sin 2120579
1
minus 1198681199011Ω1(V1198665) cos 120579
1minus 119888 (
2minus 1)
minus 119896 (1205792minus 1205791) = 0
(9a)
1198681199002
1205792minus
1
2(1198681199012
minus 1198681199002) (V1198665)2 sin 2120579
2
minus 1198681199012Ω2(V1198665) cos 120579
2+ 119888 (
2minus 1)
+ 119896 (1205792minus 1205791) = 0
(9b)
1205721
+1198662
5[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
V
+
1205722+ 1198664
5[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
VV2
+ 1205724V + 1198665
[[[[[[
[
(1198681199011
minus 1198681199001) V1198665
1205791sin 2120579
1
+ (1198681199012
minus 1198681199002) V1198665
1205792sin 2120579
2
+1198681199012Ω2
1205792cos 1205792
+1198681199011Ω1
1205791cos 1205791
]]]]]]
]
= minus120574
(10)
3 Optimal Tuning aboutthe Equilibrium Position
The easiest way to approach this problem is from the point ofview of energy We have chosen the kinetic to be zero whenthe tip mass is at the bottom of its swing Setting V asymp 0 and asymp 0 about the equilibrium position (9a) and (9b) and (10)are reduced to
1198681199001
1205791minus 1198681199011Ω1(V1198665) cos 120579
1minus 119888 (
2minus 1) minus 119896 (120579
2
minus 1205791) = 0
(11a)
1198681199002
1205792minus 1198681199012Ω2(V1198665) cos 120579
2+ 119888 (
2minus 1) + 119896 (120579
2
minus 1205791) = 0
(11b)
1205721+ 1198662
5[1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+ 1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
] V + 1205724V + 1198665(1198681199011Ω1
1205791cos 1205791
+ 1198681199012Ω2
1205792cos 1205792) = minus120574
(12)
Shock and Vibration 5
The natural frequencies of gyro and beam can be determinedas follows respectively
1205962
1198921=
119896
1198681199001
1205962
1198922=
119896
1198681199002
(13a)
1205962
119899=
1205724
1205721+ 11986625[1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+ 1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
(13b)
Assume a harmonic disturbing base excitation 119911 = 119911119890119895120596119905 and
the responses may be written as angular frequency 120596
120579 = 120579119890119895120596119905
V = V119890119895120596119905(14)
Therefore (11a) and (11b) and (12) can be rewritten in thematrix form
1205791
[[[
[
11989512059611986651198681199011Ω1cos 1205791
minus11986811990011205962+ 119895119888120596 + 119896
minus119895119888120596 minus 119896
]]]
]
+ 1205792
[[[
[
11989512059611986651198681199012Ω2cos 1205792
minus119895119888120596 minus 119896
minus11986811990021205962+ 119895119888120596 + 119896
]]]
]
+ V
[[[[[[[[[[
[
minus1205962
1205721
+1198662
5[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
+ 1205724
minus1198951205961198681199011Ω11198665cos 1205791
minus1198951205961198681199012Ω21198665cos 1205792
]]]]]]]]]]
]
=[[[
[
1205962120574119911
0
0
]]]
]
(15)
The responses of gyro-1 and gyro-2must become equal (|1205791| =
|1205792|) when 119868
1199001= 1198681199002 1198681199011
= 1198681199012 andΩ
1= minusΩ2 Hence solving
these equations yields
V =
1205962120574119911 [(minus119868
1199001205962+ 119895119888120596 + 119896)
2
minus (minus119895119888120596 minus 119896)2
]
119909
(16)
1205791
=1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) [(minus119868
1199001205962+ 119895119888120596 + 119896) minus (minus119895119888120596 minus 119896)]
119909
(17a)
1205792
=minus1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) [(minus119868
1199001205962+ 119895119888120596 + 119896) minus (minus119895119888120596 minus 119896)]
119909
(17b)
where 119909 = (1198951205961198665119868119901Ω cos 120579)2[4(119895119888120596+119896)minus2119868
1199001205962]+[minus120596
21205721+
21198662
5[119868119900(cos 120579)2+119868
119901(sin 120579)
2]+1205724][(minus1198681199001205962+119895119888120596+119896)
2minus(minus119895119888120596minus
119896)2]
31 The Undamped Gyroscopic Vibration Absorber By elimi-nating terms of damping (17b) then yields
1205792=
minus1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) (minus119868
1199001205962+ 2119896)
2 (1198951205961198665119868119901Ω cos 120579)
2
(minus1198681199001205962 + 2119896) + [minus1205962 120572
1+ 211986625[119868119900(cos 120579)2 + 119868
119901(sin 120579)
2] + 120572
4] (minus1198681199001205962) (minus119868
1199001205962 + 2119896)
(18)
6 Shock and Vibration120596
max
5069450694506945069450694506945069550695506955069550695
minus1 minus05 0 05 1 15minus15
120579 (rad)
(a)
050 1 15minus1 minus05minus15
120579 (rad)
120579co
s(120579
)
minus05
minus04
minus03
minus02
minus01
00102030405
(b)
Figure 3 The theoretical limit curves natural frequency rads (a) gyro response rad (b)
When 1205962= 1205962
119899and 120579 = 120579
2= 120579max for equation of a stable
motion at120596 le 120596119899except for1205962 = 119896119868
0= 1205962
119892 (18) corresponds
to
10038161003816100381610038161003816120579max
10038161003816100381610038161003816=
120574119911120596119899
21198665119868119901Ω cos 120579max
(19)
Equation (19) can be modified into the following forms
120579max cos 120579max = plusmn120596119899120574119911
21198681199011198665Ω
120596max = plusmn21198681199011198665Ω120579max cos 120579max
120574119911
(20)
Theminimum disk speedΩmin should be chosen carefully toeliminate the instability at 120596 le 120596
119899 Suppose that a minimum
disk speed Ωmin is required for a stable motion Then thistransforms to a minimum disk speed equation
Ωmin = plusmn120596119899120574119911
21198681199011198665120579max cos 120579max
(21)
Figure 3 shows that the theoretical limit of the amplitude atresonance is one when absolute value of the precession 120579maxapproaches 086 rad Suppose that |120579max cos 120579max| = 05611
and |120579max| = 086 rad for minus1205872 le 120579 le 1205872 Equation (21) maybe rewritten as
Ωmin = 08911120596119899120574119911
1198681199011198665
(22)
where (13b) is then
120596119899= radic
1205724
1205721+ 211986625[0426119868
119900+ 0574119868
119901] (23)
For the minimum tip mass displacement |V| = 0 theexcitation frequency should be 120596
2= 2119896119868
119900obtained from
(16)
5 10 15 20 25 300Forcing frequency 120596 (rads)
0002004006008
01012014016018
02
Abs
disp
lace
men
t|| (
m)
Figure 4 The theoretical frequency response curves of tip of beamwithΩmin = 15850 rpm and 119911 = 005m for (dotted) 119896 = 0 and 119888 = 0for (dash-dot) 119896 = 119868
11990012059622 and 119888 = 0 and for (solid) 119896 = 119868
11990012059622 and
119888 = 11986811990012059624120596119892
32 The Damped Gyroscopic Vibration Absorber With thehelp of (16) in order to reach the minimum tip massdisplacement |V| = 0 it can be rewritten as
1205962120574119911 [(minus119868
1199001205962+ 119895119888120596 + 119896)
2
minus (minus119895119888120596 minus 119896)2
] = 0 (24)
Then optimal damping can be obtained
119888 = plusmn1198681199001205962minus 2119896
2120596 (25)
Set 119896 = 1198681199001205962
1198992 and 120596 = 120596
119892= radic119896119868
119900to eliminate the
instability due to the natural frequency of the added gyro-spring system Equation (25) is then
119888opt =1198681199001205962
119899
4120596119892
(26)
Figure 4 shows the possible maxima and minima of thetheoretical frequency response at the tip of beam
4 Numerical Simulations
In the following calculations a rectangle-cross beam isconsidered with thickness ℎ = 100mm width 119887 = 150mm
Shock and Vibration 7
Table 1 Physical properties of the system
Symbol Numerical values Description119864 210 times 109Nm2 Youngrsquos modulusℎ 100mm Beam thickness119887 150mm Beam width119871 5m Length of the beam120588 7850 kgm3 Density of the beam119872119905
2000 kg Tip mass119868119905119872119905
02m2 Ratio of tip mass moment of inertia119868119905
400 kgsdotm2 Tip mass moment of inertia119868 125 times 10minus5m4 Geometrical moment of inertia of beam119892 981ms2 Gravitational acceleration119860 = 119887 sdot ℎ 0015m2 Area of cross section of beam119888 119868
1199001205962
1198994120596119892Nsdotmsdotsrad Damping coefficient
119896 119868o1205962
1198992Nsdotmrad Stiffness of torsion spring
119898 = 1198981= 1198982
50 kg Disk mass of gyroscope119903 = 1199031= 1199032
02m Radius of disk119868119901= 1198681199011
= 1198681199012
= 119898 sdot 11990322 1 kgsdotm2 Rotary inertia of disk
119868119900= 1198681199001
= 1198681199002
= 1198681199012 05 kgsdotm2 Mass moment of inertia of disk
Ω = Ω1= minusΩ
20ndash30000 rpm Rotating speed of disk
Table 2 Constants of the equation of motion of the gyro-beam system in SI units
1198661
1198662
1198663
1198664
1198665
1198666
1198667
1198668
1198669
11338 18169 00552 02467 03142 00244 60087119890 minus 4 29652119890 minus 5 03669
length 119871 = 5m density 120588 = 7850 kgm3 and Youngrsquosmodulus along the axial direction 119864 = 210 times 10
9Nm2Equations may be solved by using a Matlab software toolthat involves the fourth-order Runge-Kutta method Theparameters of the numerical example are given in Table 1 Inorder to identify the dynamical behavior frequency responseis simulated with the time step size of 01 s and zero initialconditions
41 The Undamped Gyroscopic Vibration Absorber In thecase of the base excitation with 119911 = 005 cos(120596
119899119905) Figure 5
shows the rotational speed curve for case 119896 = 1198681199001205962
1198992 It can
be seen that tip response of beam is effectively reduced overminimum rotational speed (Ωmin = 15850 rpm)
Figure 6 represents the frequency response curve of thebeam and gyro for cases Ωmin = 15850 rpm and 119896 = 119868
1199001205962
1198992
It presented that the displacement response is effectivelyreduced before the case 120596 = 120596
119899 But resonance occurs when
120596 = 120596119899 However over the resonance frequency reduction
of the vibration continues to reach the optimum scale atminimum rotational speed
42 The Damped Gyroscopic Vibration Absorber In the caseof the base excitation with 119911 = 005 cos(120596
119899119905) Figure 7 shows
the rotational speed curve for cases 119896 = 1198681199001205962
1198992 and 119888opt =
1198681199001205962
1198994120596119892The response of the beam is effectively reduced and
effect reaches low rotational speeds compared to undamped
gyrosWhen damping coefficient is zero the response of gyrocan jump into unstable zone at resonance as seen in Figure 5
It can be seen that the case of 119888opt = 1198681199001205962
1198994120596119892Nsdotmsdotsrad
is an optimumdamping coefficient which effectively reducedthe response of the beam at resonance shown in Figure 8When optimum damping coefficient is chosen the frequencyresponse of the beam can improve compared to Figures 5 and6 therefore cases 119896 = 119868
1199001205962
1198992 and 119888opt = 119868
1199001205962
1198994120596119892are chosen
to reach the optimum scale for minimum rotational speedAs a result it is shown that optimum values of the stiffnessand damping which connect two gyroscopic systems have asignificant effect on the the performance of the gyroscopicvibration absorberOn the other hand the performance of thesystem is improved as we increase the rotor speed as shownin Figure 9
5 Conclusions
The optimal parameters of the rotor speed the springand damper for the minimum responses of the gyroscopesand beam are studied This paper provides some analyticalequations to investigate these optimal parameters of a gyro-beam system The effectiveness is presented by computersimulations and the numerical results agree with the analyt-ical solutions From the consistency of the present study thefollowing conclusions are found
(1) Up to a certain rotor speed there is no mitigation inthe vibration of beam at free end But beyond this
8 Shock and Vibration
05
1
15
2
25
3D
ispla
cem
ent (
m)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
01020304050607080
05 1 15 2 25 30Ω (rpm)
(b)
Figure 5 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with the base excitation
of 119911 = 005 cos(120596119899119905)
0010203040506070809
1
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
5
10
15
20
25
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(b)
Figure 6 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with
the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
Disp
lace
men
t (m
)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
02468
101214161820
05 1 15 2 25 30Ω (rpm)
(b)
Figure 7 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892=
09Nmsrad with the base excitation of 119911 = 005 cos(120596119899119905)
as we increase the rotor speed the gyro system hassignificantly reduced the vibration of beam Hencethis value is selected as the minimum rotor speed(Ωmin = 08911(120596
1198991205741199111198681199011198665)) The rotary inertia of
the rotor can be reduced by increasing rotor speedwhich is proportional to the mass of disk Thereforethe weight and volume of the system can be reduced
(2) There exist optimum parameters for the spring anddamper for minimum response of the beam Thestiffness of the spring and damper affect the per-formance of gyroscopes The gyroscopes can jumpinto unstable zone when the stiffness is not takenproperly Optimum spring and damper parametersfor minimum response are obtained from frequency
Shock and Vibration 9
0
005
01
015
02
025
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
0
2
4
6
8
10
(b)
Figure 8 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and
119888opt = 1198681199001205962
1198994120596119892= 09Nmsrad with the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
3
Disp
lace
men
t (m
)
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
2
4
6
8
10
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(b)
Figure 9 Frequency response curves for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892
= 09Nmsrad tip response of beam (a) gyroresponse (b) for (o) Ω = 0 rpm (+) Ω = 7500 rpm and (◻)Ω = 10000 rpm with the base excitation of 119911 = 005 cos(120596119905)
equation of beam The minimum displacement hav-ing optimum spring coefficient should be chosen foroptimal damper at the resonance frequency Thensetting 120596 = 120596
119892to eliminate the instability due
to the natural frequency of the added gyro-springsystem results in optimal damping Coupling thegyroscopes with the optimal spring (119896 = 119868
1199001205962
1198992) and
damper (119888 = 1198681199001205962
1198994120596119892) is a practical and effective
approach to mitigate the undesired motions of beamand gyroscopes
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This study was mainly supported by the Scientific and Tech-nological Research Council of Turkey (TUBITAK) underGrant no 114M760
References
[1] T K Datta ldquoA state-of the-art review on active control ofstructuresrdquo ISET Journal of Earthquake Technology Paper No430 vol 40 no 1 pp 1ndash17 2003
[2] G W Housner L A Bergman T K Caughey et al ldquoStruc-tural control past present and futurerdquo Journal of EngineeringMechanics vol 123 no 9 pp 897ndash971 1997
[3] T T Soong Active Structural Control Theory and PracticeLongman Scientific and Technical New York NY USA 1990
[4] B F Spencer Jr and M K Sain ldquoControlling buildings a newfrontier in feedbackrdquo IEEEControl SystemsMagazine vol 17 no6 pp 19ndash35 1997
[5] T Kobori ldquoPast present and future in seismic response controlin civil engineering structuresrdquo in Proceedings of the 3rd WorldConference on Structural Control pp 9ndash14 Wiley New YorkNY USA 2003
[6] T T Soong and B F Spencer Jr ldquoSupplemental energy dissi-pation state-of-the-art and state-of-the-practicerdquo EngineeringStructures vol 24 no 3 pp 243ndash259 2002
[7] B F Spencer Jr ldquoCivil engineering applications of smartdamping technologyrdquo in Proceedings of the 5th International
10 Shock and Vibration
Conference on Vibration Engineering pp 771ndash782 NanjingChina 2002
[8] T T Soong andG F DargushPassive EnergyDissipation Systemin Structural Engineering Wiley New York NY USA 1997
[9] N C Townsend A J Murphy and R A Shenoi ldquoA new activegyrostabiliser system for ride control of marine vehiclesrdquoOceanEngineering vol 34 no 11-12 pp 1607ndash1617 2007
[10] BThornton TUra YNose and S Turnock ldquoInternal actuationof underwater robots using control moment gyrosrdquo in Proceed-ings of the IEEE OCEANS Conference vol 1 pp 591ndash598 BrestFrance June 2005
[11] T Perez and P Steinmann ldquoAnalysis of ship roll gyrostabilisercontrolrdquo in Proceedings of the 8th IFAC Conference on Manoeu-vring and Control of Marine Craft pp 310ndash315 Guaruja BrazilSeptember 2009
[12] E O Schlick ldquoDevice for minimising the oscillatory move-ments of shipsrdquo Patent US769 493 1904
[13] E O Schlick ldquoThe gyroscopic effect of flywheels on board shiprdquoTransactions of the Institute of Naval Architects vol 23 pp 117ndash134 1904
[14] F Unker andO Cuvalcı ldquoNonlinearmotion control of a columnusing a coupled gyroscoperdquo ProcediamdashSocial and BehavioralSciences vol 195 pp 2242ndash2252 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 5
The natural frequencies of gyro and beam can be determinedas follows respectively
1205962
1198921=
119896
1198681199001
1205962
1198922=
119896
1198681199002
(13a)
1205962
119899=
1205724
1205721+ 11986625[1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+ 1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
(13b)
Assume a harmonic disturbing base excitation 119911 = 119911119890119895120596119905 and
the responses may be written as angular frequency 120596
120579 = 120579119890119895120596119905
V = V119890119895120596119905(14)
Therefore (11a) and (11b) and (12) can be rewritten in thematrix form
1205791
[[[
[
11989512059611986651198681199011Ω1cos 1205791
minus11986811990011205962+ 119895119888120596 + 119896
minus119895119888120596 minus 119896
]]]
]
+ 1205792
[[[
[
11989512059611986651198681199012Ω2cos 1205792
minus119895119888120596 minus 119896
minus11986811990021205962+ 119895119888120596 + 119896
]]]
]
+ V
[[[[[[[[[[
[
minus1205962
1205721
+1198662
5[
[
1198681199001
(cos 1205791)2
+ 1198681199011
(sin 1205791)2
+1198681199002
(cos 1205792)2
+ 1198681199012
(sin 1205792)2
]
]
+ 1205724
minus1198951205961198681199011Ω11198665cos 1205791
minus1198951205961198681199012Ω21198665cos 1205792
]]]]]]]]]]
]
=[[[
[
1205962120574119911
0
0
]]]
]
(15)
The responses of gyro-1 and gyro-2must become equal (|1205791| =
|1205792|) when 119868
1199001= 1198681199002 1198681199011
= 1198681199012 andΩ
1= minusΩ2 Hence solving
these equations yields
V =
1205962120574119911 [(minus119868
1199001205962+ 119895119888120596 + 119896)
2
minus (minus119895119888120596 minus 119896)2
]
119909
(16)
1205791
=1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) [(minus119868
1199001205962+ 119895119888120596 + 119896) minus (minus119895119888120596 minus 119896)]
119909
(17a)
1205792
=minus1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) [(minus119868
1199001205962+ 119895119888120596 + 119896) minus (minus119895119888120596 minus 119896)]
119909
(17b)
where 119909 = (1198951205961198665119868119901Ω cos 120579)2[4(119895119888120596+119896)minus2119868
1199001205962]+[minus120596
21205721+
21198662
5[119868119900(cos 120579)2+119868
119901(sin 120579)
2]+1205724][(minus1198681199001205962+119895119888120596+119896)
2minus(minus119895119888120596minus
119896)2]
31 The Undamped Gyroscopic Vibration Absorber By elimi-nating terms of damping (17b) then yields
1205792=
minus1205962120574119911 (minus119895120596119868
119901Ω1198665cos 120579) (minus119868
1199001205962+ 2119896)
2 (1198951205961198665119868119901Ω cos 120579)
2
(minus1198681199001205962 + 2119896) + [minus1205962 120572
1+ 211986625[119868119900(cos 120579)2 + 119868
119901(sin 120579)
2] + 120572
4] (minus1198681199001205962) (minus119868
1199001205962 + 2119896)
(18)
6 Shock and Vibration120596
max
5069450694506945069450694506945069550695506955069550695
minus1 minus05 0 05 1 15minus15
120579 (rad)
(a)
050 1 15minus1 minus05minus15
120579 (rad)
120579co
s(120579
)
minus05
minus04
minus03
minus02
minus01
00102030405
(b)
Figure 3 The theoretical limit curves natural frequency rads (a) gyro response rad (b)
When 1205962= 1205962
119899and 120579 = 120579
2= 120579max for equation of a stable
motion at120596 le 120596119899except for1205962 = 119896119868
0= 1205962
119892 (18) corresponds
to
10038161003816100381610038161003816120579max
10038161003816100381610038161003816=
120574119911120596119899
21198665119868119901Ω cos 120579max
(19)
Equation (19) can be modified into the following forms
120579max cos 120579max = plusmn120596119899120574119911
21198681199011198665Ω
120596max = plusmn21198681199011198665Ω120579max cos 120579max
120574119911
(20)
Theminimum disk speedΩmin should be chosen carefully toeliminate the instability at 120596 le 120596
119899 Suppose that a minimum
disk speed Ωmin is required for a stable motion Then thistransforms to a minimum disk speed equation
Ωmin = plusmn120596119899120574119911
21198681199011198665120579max cos 120579max
(21)
Figure 3 shows that the theoretical limit of the amplitude atresonance is one when absolute value of the precession 120579maxapproaches 086 rad Suppose that |120579max cos 120579max| = 05611
and |120579max| = 086 rad for minus1205872 le 120579 le 1205872 Equation (21) maybe rewritten as
Ωmin = 08911120596119899120574119911
1198681199011198665
(22)
where (13b) is then
120596119899= radic
1205724
1205721+ 211986625[0426119868
119900+ 0574119868
119901] (23)
For the minimum tip mass displacement |V| = 0 theexcitation frequency should be 120596
2= 2119896119868
119900obtained from
(16)
5 10 15 20 25 300Forcing frequency 120596 (rads)
0002004006008
01012014016018
02
Abs
disp
lace
men
t|| (
m)
Figure 4 The theoretical frequency response curves of tip of beamwithΩmin = 15850 rpm and 119911 = 005m for (dotted) 119896 = 0 and 119888 = 0for (dash-dot) 119896 = 119868
11990012059622 and 119888 = 0 and for (solid) 119896 = 119868
11990012059622 and
119888 = 11986811990012059624120596119892
32 The Damped Gyroscopic Vibration Absorber With thehelp of (16) in order to reach the minimum tip massdisplacement |V| = 0 it can be rewritten as
1205962120574119911 [(minus119868
1199001205962+ 119895119888120596 + 119896)
2
minus (minus119895119888120596 minus 119896)2
] = 0 (24)
Then optimal damping can be obtained
119888 = plusmn1198681199001205962minus 2119896
2120596 (25)
Set 119896 = 1198681199001205962
1198992 and 120596 = 120596
119892= radic119896119868
119900to eliminate the
instability due to the natural frequency of the added gyro-spring system Equation (25) is then
119888opt =1198681199001205962
119899
4120596119892
(26)
Figure 4 shows the possible maxima and minima of thetheoretical frequency response at the tip of beam
4 Numerical Simulations
In the following calculations a rectangle-cross beam isconsidered with thickness ℎ = 100mm width 119887 = 150mm
Shock and Vibration 7
Table 1 Physical properties of the system
Symbol Numerical values Description119864 210 times 109Nm2 Youngrsquos modulusℎ 100mm Beam thickness119887 150mm Beam width119871 5m Length of the beam120588 7850 kgm3 Density of the beam119872119905
2000 kg Tip mass119868119905119872119905
02m2 Ratio of tip mass moment of inertia119868119905
400 kgsdotm2 Tip mass moment of inertia119868 125 times 10minus5m4 Geometrical moment of inertia of beam119892 981ms2 Gravitational acceleration119860 = 119887 sdot ℎ 0015m2 Area of cross section of beam119888 119868
1199001205962
1198994120596119892Nsdotmsdotsrad Damping coefficient
119896 119868o1205962
1198992Nsdotmrad Stiffness of torsion spring
119898 = 1198981= 1198982
50 kg Disk mass of gyroscope119903 = 1199031= 1199032
02m Radius of disk119868119901= 1198681199011
= 1198681199012
= 119898 sdot 11990322 1 kgsdotm2 Rotary inertia of disk
119868119900= 1198681199001
= 1198681199002
= 1198681199012 05 kgsdotm2 Mass moment of inertia of disk
Ω = Ω1= minusΩ
20ndash30000 rpm Rotating speed of disk
Table 2 Constants of the equation of motion of the gyro-beam system in SI units
1198661
1198662
1198663
1198664
1198665
1198666
1198667
1198668
1198669
11338 18169 00552 02467 03142 00244 60087119890 minus 4 29652119890 minus 5 03669
length 119871 = 5m density 120588 = 7850 kgm3 and Youngrsquosmodulus along the axial direction 119864 = 210 times 10
9Nm2Equations may be solved by using a Matlab software toolthat involves the fourth-order Runge-Kutta method Theparameters of the numerical example are given in Table 1 Inorder to identify the dynamical behavior frequency responseis simulated with the time step size of 01 s and zero initialconditions
41 The Undamped Gyroscopic Vibration Absorber In thecase of the base excitation with 119911 = 005 cos(120596
119899119905) Figure 5
shows the rotational speed curve for case 119896 = 1198681199001205962
1198992 It can
be seen that tip response of beam is effectively reduced overminimum rotational speed (Ωmin = 15850 rpm)
Figure 6 represents the frequency response curve of thebeam and gyro for cases Ωmin = 15850 rpm and 119896 = 119868
1199001205962
1198992
It presented that the displacement response is effectivelyreduced before the case 120596 = 120596
119899 But resonance occurs when
120596 = 120596119899 However over the resonance frequency reduction
of the vibration continues to reach the optimum scale atminimum rotational speed
42 The Damped Gyroscopic Vibration Absorber In the caseof the base excitation with 119911 = 005 cos(120596
119899119905) Figure 7 shows
the rotational speed curve for cases 119896 = 1198681199001205962
1198992 and 119888opt =
1198681199001205962
1198994120596119892The response of the beam is effectively reduced and
effect reaches low rotational speeds compared to undamped
gyrosWhen damping coefficient is zero the response of gyrocan jump into unstable zone at resonance as seen in Figure 5
It can be seen that the case of 119888opt = 1198681199001205962
1198994120596119892Nsdotmsdotsrad
is an optimumdamping coefficient which effectively reducedthe response of the beam at resonance shown in Figure 8When optimum damping coefficient is chosen the frequencyresponse of the beam can improve compared to Figures 5 and6 therefore cases 119896 = 119868
1199001205962
1198992 and 119888opt = 119868
1199001205962
1198994120596119892are chosen
to reach the optimum scale for minimum rotational speedAs a result it is shown that optimum values of the stiffnessand damping which connect two gyroscopic systems have asignificant effect on the the performance of the gyroscopicvibration absorberOn the other hand the performance of thesystem is improved as we increase the rotor speed as shownin Figure 9
5 Conclusions
The optimal parameters of the rotor speed the springand damper for the minimum responses of the gyroscopesand beam are studied This paper provides some analyticalequations to investigate these optimal parameters of a gyro-beam system The effectiveness is presented by computersimulations and the numerical results agree with the analyt-ical solutions From the consistency of the present study thefollowing conclusions are found
(1) Up to a certain rotor speed there is no mitigation inthe vibration of beam at free end But beyond this
8 Shock and Vibration
05
1
15
2
25
3D
ispla
cem
ent (
m)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
01020304050607080
05 1 15 2 25 30Ω (rpm)
(b)
Figure 5 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with the base excitation
of 119911 = 005 cos(120596119899119905)
0010203040506070809
1
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
5
10
15
20
25
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(b)
Figure 6 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with
the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
Disp
lace
men
t (m
)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
02468
101214161820
05 1 15 2 25 30Ω (rpm)
(b)
Figure 7 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892=
09Nmsrad with the base excitation of 119911 = 005 cos(120596119899119905)
as we increase the rotor speed the gyro system hassignificantly reduced the vibration of beam Hencethis value is selected as the minimum rotor speed(Ωmin = 08911(120596
1198991205741199111198681199011198665)) The rotary inertia of
the rotor can be reduced by increasing rotor speedwhich is proportional to the mass of disk Thereforethe weight and volume of the system can be reduced
(2) There exist optimum parameters for the spring anddamper for minimum response of the beam Thestiffness of the spring and damper affect the per-formance of gyroscopes The gyroscopes can jumpinto unstable zone when the stiffness is not takenproperly Optimum spring and damper parametersfor minimum response are obtained from frequency
Shock and Vibration 9
0
005
01
015
02
025
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
0
2
4
6
8
10
(b)
Figure 8 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and
119888opt = 1198681199001205962
1198994120596119892= 09Nmsrad with the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
3
Disp
lace
men
t (m
)
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
2
4
6
8
10
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(b)
Figure 9 Frequency response curves for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892
= 09Nmsrad tip response of beam (a) gyroresponse (b) for (o) Ω = 0 rpm (+) Ω = 7500 rpm and (◻)Ω = 10000 rpm with the base excitation of 119911 = 005 cos(120596119905)
equation of beam The minimum displacement hav-ing optimum spring coefficient should be chosen foroptimal damper at the resonance frequency Thensetting 120596 = 120596
119892to eliminate the instability due
to the natural frequency of the added gyro-springsystem results in optimal damping Coupling thegyroscopes with the optimal spring (119896 = 119868
1199001205962
1198992) and
damper (119888 = 1198681199001205962
1198994120596119892) is a practical and effective
approach to mitigate the undesired motions of beamand gyroscopes
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This study was mainly supported by the Scientific and Tech-nological Research Council of Turkey (TUBITAK) underGrant no 114M760
References
[1] T K Datta ldquoA state-of the-art review on active control ofstructuresrdquo ISET Journal of Earthquake Technology Paper No430 vol 40 no 1 pp 1ndash17 2003
[2] G W Housner L A Bergman T K Caughey et al ldquoStruc-tural control past present and futurerdquo Journal of EngineeringMechanics vol 123 no 9 pp 897ndash971 1997
[3] T T Soong Active Structural Control Theory and PracticeLongman Scientific and Technical New York NY USA 1990
[4] B F Spencer Jr and M K Sain ldquoControlling buildings a newfrontier in feedbackrdquo IEEEControl SystemsMagazine vol 17 no6 pp 19ndash35 1997
[5] T Kobori ldquoPast present and future in seismic response controlin civil engineering structuresrdquo in Proceedings of the 3rd WorldConference on Structural Control pp 9ndash14 Wiley New YorkNY USA 2003
[6] T T Soong and B F Spencer Jr ldquoSupplemental energy dissi-pation state-of-the-art and state-of-the-practicerdquo EngineeringStructures vol 24 no 3 pp 243ndash259 2002
[7] B F Spencer Jr ldquoCivil engineering applications of smartdamping technologyrdquo in Proceedings of the 5th International
10 Shock and Vibration
Conference on Vibration Engineering pp 771ndash782 NanjingChina 2002
[8] T T Soong andG F DargushPassive EnergyDissipation Systemin Structural Engineering Wiley New York NY USA 1997
[9] N C Townsend A J Murphy and R A Shenoi ldquoA new activegyrostabiliser system for ride control of marine vehiclesrdquoOceanEngineering vol 34 no 11-12 pp 1607ndash1617 2007
[10] BThornton TUra YNose and S Turnock ldquoInternal actuationof underwater robots using control moment gyrosrdquo in Proceed-ings of the IEEE OCEANS Conference vol 1 pp 591ndash598 BrestFrance June 2005
[11] T Perez and P Steinmann ldquoAnalysis of ship roll gyrostabilisercontrolrdquo in Proceedings of the 8th IFAC Conference on Manoeu-vring and Control of Marine Craft pp 310ndash315 Guaruja BrazilSeptember 2009
[12] E O Schlick ldquoDevice for minimising the oscillatory move-ments of shipsrdquo Patent US769 493 1904
[13] E O Schlick ldquoThe gyroscopic effect of flywheels on board shiprdquoTransactions of the Institute of Naval Architects vol 23 pp 117ndash134 1904
[14] F Unker andO Cuvalcı ldquoNonlinearmotion control of a columnusing a coupled gyroscoperdquo ProcediamdashSocial and BehavioralSciences vol 195 pp 2242ndash2252 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Shock and Vibration120596
max
5069450694506945069450694506945069550695506955069550695
minus1 minus05 0 05 1 15minus15
120579 (rad)
(a)
050 1 15minus1 minus05minus15
120579 (rad)
120579co
s(120579
)
minus05
minus04
minus03
minus02
minus01
00102030405
(b)
Figure 3 The theoretical limit curves natural frequency rads (a) gyro response rad (b)
When 1205962= 1205962
119899and 120579 = 120579
2= 120579max for equation of a stable
motion at120596 le 120596119899except for1205962 = 119896119868
0= 1205962
119892 (18) corresponds
to
10038161003816100381610038161003816120579max
10038161003816100381610038161003816=
120574119911120596119899
21198665119868119901Ω cos 120579max
(19)
Equation (19) can be modified into the following forms
120579max cos 120579max = plusmn120596119899120574119911
21198681199011198665Ω
120596max = plusmn21198681199011198665Ω120579max cos 120579max
120574119911
(20)
Theminimum disk speedΩmin should be chosen carefully toeliminate the instability at 120596 le 120596
119899 Suppose that a minimum
disk speed Ωmin is required for a stable motion Then thistransforms to a minimum disk speed equation
Ωmin = plusmn120596119899120574119911
21198681199011198665120579max cos 120579max
(21)
Figure 3 shows that the theoretical limit of the amplitude atresonance is one when absolute value of the precession 120579maxapproaches 086 rad Suppose that |120579max cos 120579max| = 05611
and |120579max| = 086 rad for minus1205872 le 120579 le 1205872 Equation (21) maybe rewritten as
Ωmin = 08911120596119899120574119911
1198681199011198665
(22)
where (13b) is then
120596119899= radic
1205724
1205721+ 211986625[0426119868
119900+ 0574119868
119901] (23)
For the minimum tip mass displacement |V| = 0 theexcitation frequency should be 120596
2= 2119896119868
119900obtained from
(16)
5 10 15 20 25 300Forcing frequency 120596 (rads)
0002004006008
01012014016018
02
Abs
disp
lace
men
t|| (
m)
Figure 4 The theoretical frequency response curves of tip of beamwithΩmin = 15850 rpm and 119911 = 005m for (dotted) 119896 = 0 and 119888 = 0for (dash-dot) 119896 = 119868
11990012059622 and 119888 = 0 and for (solid) 119896 = 119868
11990012059622 and
119888 = 11986811990012059624120596119892
32 The Damped Gyroscopic Vibration Absorber With thehelp of (16) in order to reach the minimum tip massdisplacement |V| = 0 it can be rewritten as
1205962120574119911 [(minus119868
1199001205962+ 119895119888120596 + 119896)
2
minus (minus119895119888120596 minus 119896)2
] = 0 (24)
Then optimal damping can be obtained
119888 = plusmn1198681199001205962minus 2119896
2120596 (25)
Set 119896 = 1198681199001205962
1198992 and 120596 = 120596
119892= radic119896119868
119900to eliminate the
instability due to the natural frequency of the added gyro-spring system Equation (25) is then
119888opt =1198681199001205962
119899
4120596119892
(26)
Figure 4 shows the possible maxima and minima of thetheoretical frequency response at the tip of beam
4 Numerical Simulations
In the following calculations a rectangle-cross beam isconsidered with thickness ℎ = 100mm width 119887 = 150mm
Shock and Vibration 7
Table 1 Physical properties of the system
Symbol Numerical values Description119864 210 times 109Nm2 Youngrsquos modulusℎ 100mm Beam thickness119887 150mm Beam width119871 5m Length of the beam120588 7850 kgm3 Density of the beam119872119905
2000 kg Tip mass119868119905119872119905
02m2 Ratio of tip mass moment of inertia119868119905
400 kgsdotm2 Tip mass moment of inertia119868 125 times 10minus5m4 Geometrical moment of inertia of beam119892 981ms2 Gravitational acceleration119860 = 119887 sdot ℎ 0015m2 Area of cross section of beam119888 119868
1199001205962
1198994120596119892Nsdotmsdotsrad Damping coefficient
119896 119868o1205962
1198992Nsdotmrad Stiffness of torsion spring
119898 = 1198981= 1198982
50 kg Disk mass of gyroscope119903 = 1199031= 1199032
02m Radius of disk119868119901= 1198681199011
= 1198681199012
= 119898 sdot 11990322 1 kgsdotm2 Rotary inertia of disk
119868119900= 1198681199001
= 1198681199002
= 1198681199012 05 kgsdotm2 Mass moment of inertia of disk
Ω = Ω1= minusΩ
20ndash30000 rpm Rotating speed of disk
Table 2 Constants of the equation of motion of the gyro-beam system in SI units
1198661
1198662
1198663
1198664
1198665
1198666
1198667
1198668
1198669
11338 18169 00552 02467 03142 00244 60087119890 minus 4 29652119890 minus 5 03669
length 119871 = 5m density 120588 = 7850 kgm3 and Youngrsquosmodulus along the axial direction 119864 = 210 times 10
9Nm2Equations may be solved by using a Matlab software toolthat involves the fourth-order Runge-Kutta method Theparameters of the numerical example are given in Table 1 Inorder to identify the dynamical behavior frequency responseis simulated with the time step size of 01 s and zero initialconditions
41 The Undamped Gyroscopic Vibration Absorber In thecase of the base excitation with 119911 = 005 cos(120596
119899119905) Figure 5
shows the rotational speed curve for case 119896 = 1198681199001205962
1198992 It can
be seen that tip response of beam is effectively reduced overminimum rotational speed (Ωmin = 15850 rpm)
Figure 6 represents the frequency response curve of thebeam and gyro for cases Ωmin = 15850 rpm and 119896 = 119868
1199001205962
1198992
It presented that the displacement response is effectivelyreduced before the case 120596 = 120596
119899 But resonance occurs when
120596 = 120596119899 However over the resonance frequency reduction
of the vibration continues to reach the optimum scale atminimum rotational speed
42 The Damped Gyroscopic Vibration Absorber In the caseof the base excitation with 119911 = 005 cos(120596
119899119905) Figure 7 shows
the rotational speed curve for cases 119896 = 1198681199001205962
1198992 and 119888opt =
1198681199001205962
1198994120596119892The response of the beam is effectively reduced and
effect reaches low rotational speeds compared to undamped
gyrosWhen damping coefficient is zero the response of gyrocan jump into unstable zone at resonance as seen in Figure 5
It can be seen that the case of 119888opt = 1198681199001205962
1198994120596119892Nsdotmsdotsrad
is an optimumdamping coefficient which effectively reducedthe response of the beam at resonance shown in Figure 8When optimum damping coefficient is chosen the frequencyresponse of the beam can improve compared to Figures 5 and6 therefore cases 119896 = 119868
1199001205962
1198992 and 119888opt = 119868
1199001205962
1198994120596119892are chosen
to reach the optimum scale for minimum rotational speedAs a result it is shown that optimum values of the stiffnessand damping which connect two gyroscopic systems have asignificant effect on the the performance of the gyroscopicvibration absorberOn the other hand the performance of thesystem is improved as we increase the rotor speed as shownin Figure 9
5 Conclusions
The optimal parameters of the rotor speed the springand damper for the minimum responses of the gyroscopesand beam are studied This paper provides some analyticalequations to investigate these optimal parameters of a gyro-beam system The effectiveness is presented by computersimulations and the numerical results agree with the analyt-ical solutions From the consistency of the present study thefollowing conclusions are found
(1) Up to a certain rotor speed there is no mitigation inthe vibration of beam at free end But beyond this
8 Shock and Vibration
05
1
15
2
25
3D
ispla
cem
ent (
m)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
01020304050607080
05 1 15 2 25 30Ω (rpm)
(b)
Figure 5 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with the base excitation
of 119911 = 005 cos(120596119899119905)
0010203040506070809
1
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
5
10
15
20
25
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(b)
Figure 6 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with
the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
Disp
lace
men
t (m
)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
02468
101214161820
05 1 15 2 25 30Ω (rpm)
(b)
Figure 7 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892=
09Nmsrad with the base excitation of 119911 = 005 cos(120596119899119905)
as we increase the rotor speed the gyro system hassignificantly reduced the vibration of beam Hencethis value is selected as the minimum rotor speed(Ωmin = 08911(120596
1198991205741199111198681199011198665)) The rotary inertia of
the rotor can be reduced by increasing rotor speedwhich is proportional to the mass of disk Thereforethe weight and volume of the system can be reduced
(2) There exist optimum parameters for the spring anddamper for minimum response of the beam Thestiffness of the spring and damper affect the per-formance of gyroscopes The gyroscopes can jumpinto unstable zone when the stiffness is not takenproperly Optimum spring and damper parametersfor minimum response are obtained from frequency
Shock and Vibration 9
0
005
01
015
02
025
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
0
2
4
6
8
10
(b)
Figure 8 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and
119888opt = 1198681199001205962
1198994120596119892= 09Nmsrad with the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
3
Disp
lace
men
t (m
)
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
2
4
6
8
10
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(b)
Figure 9 Frequency response curves for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892
= 09Nmsrad tip response of beam (a) gyroresponse (b) for (o) Ω = 0 rpm (+) Ω = 7500 rpm and (◻)Ω = 10000 rpm with the base excitation of 119911 = 005 cos(120596119905)
equation of beam The minimum displacement hav-ing optimum spring coefficient should be chosen foroptimal damper at the resonance frequency Thensetting 120596 = 120596
119892to eliminate the instability due
to the natural frequency of the added gyro-springsystem results in optimal damping Coupling thegyroscopes with the optimal spring (119896 = 119868
1199001205962
1198992) and
damper (119888 = 1198681199001205962
1198994120596119892) is a practical and effective
approach to mitigate the undesired motions of beamand gyroscopes
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This study was mainly supported by the Scientific and Tech-nological Research Council of Turkey (TUBITAK) underGrant no 114M760
References
[1] T K Datta ldquoA state-of the-art review on active control ofstructuresrdquo ISET Journal of Earthquake Technology Paper No430 vol 40 no 1 pp 1ndash17 2003
[2] G W Housner L A Bergman T K Caughey et al ldquoStruc-tural control past present and futurerdquo Journal of EngineeringMechanics vol 123 no 9 pp 897ndash971 1997
[3] T T Soong Active Structural Control Theory and PracticeLongman Scientific and Technical New York NY USA 1990
[4] B F Spencer Jr and M K Sain ldquoControlling buildings a newfrontier in feedbackrdquo IEEEControl SystemsMagazine vol 17 no6 pp 19ndash35 1997
[5] T Kobori ldquoPast present and future in seismic response controlin civil engineering structuresrdquo in Proceedings of the 3rd WorldConference on Structural Control pp 9ndash14 Wiley New YorkNY USA 2003
[6] T T Soong and B F Spencer Jr ldquoSupplemental energy dissi-pation state-of-the-art and state-of-the-practicerdquo EngineeringStructures vol 24 no 3 pp 243ndash259 2002
[7] B F Spencer Jr ldquoCivil engineering applications of smartdamping technologyrdquo in Proceedings of the 5th International
10 Shock and Vibration
Conference on Vibration Engineering pp 771ndash782 NanjingChina 2002
[8] T T Soong andG F DargushPassive EnergyDissipation Systemin Structural Engineering Wiley New York NY USA 1997
[9] N C Townsend A J Murphy and R A Shenoi ldquoA new activegyrostabiliser system for ride control of marine vehiclesrdquoOceanEngineering vol 34 no 11-12 pp 1607ndash1617 2007
[10] BThornton TUra YNose and S Turnock ldquoInternal actuationof underwater robots using control moment gyrosrdquo in Proceed-ings of the IEEE OCEANS Conference vol 1 pp 591ndash598 BrestFrance June 2005
[11] T Perez and P Steinmann ldquoAnalysis of ship roll gyrostabilisercontrolrdquo in Proceedings of the 8th IFAC Conference on Manoeu-vring and Control of Marine Craft pp 310ndash315 Guaruja BrazilSeptember 2009
[12] E O Schlick ldquoDevice for minimising the oscillatory move-ments of shipsrdquo Patent US769 493 1904
[13] E O Schlick ldquoThe gyroscopic effect of flywheels on board shiprdquoTransactions of the Institute of Naval Architects vol 23 pp 117ndash134 1904
[14] F Unker andO Cuvalcı ldquoNonlinearmotion control of a columnusing a coupled gyroscoperdquo ProcediamdashSocial and BehavioralSciences vol 195 pp 2242ndash2252 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 7
Table 1 Physical properties of the system
Symbol Numerical values Description119864 210 times 109Nm2 Youngrsquos modulusℎ 100mm Beam thickness119887 150mm Beam width119871 5m Length of the beam120588 7850 kgm3 Density of the beam119872119905
2000 kg Tip mass119868119905119872119905
02m2 Ratio of tip mass moment of inertia119868119905
400 kgsdotm2 Tip mass moment of inertia119868 125 times 10minus5m4 Geometrical moment of inertia of beam119892 981ms2 Gravitational acceleration119860 = 119887 sdot ℎ 0015m2 Area of cross section of beam119888 119868
1199001205962
1198994120596119892Nsdotmsdotsrad Damping coefficient
119896 119868o1205962
1198992Nsdotmrad Stiffness of torsion spring
119898 = 1198981= 1198982
50 kg Disk mass of gyroscope119903 = 1199031= 1199032
02m Radius of disk119868119901= 1198681199011
= 1198681199012
= 119898 sdot 11990322 1 kgsdotm2 Rotary inertia of disk
119868119900= 1198681199001
= 1198681199002
= 1198681199012 05 kgsdotm2 Mass moment of inertia of disk
Ω = Ω1= minusΩ
20ndash30000 rpm Rotating speed of disk
Table 2 Constants of the equation of motion of the gyro-beam system in SI units
1198661
1198662
1198663
1198664
1198665
1198666
1198667
1198668
1198669
11338 18169 00552 02467 03142 00244 60087119890 minus 4 29652119890 minus 5 03669
length 119871 = 5m density 120588 = 7850 kgm3 and Youngrsquosmodulus along the axial direction 119864 = 210 times 10
9Nm2Equations may be solved by using a Matlab software toolthat involves the fourth-order Runge-Kutta method Theparameters of the numerical example are given in Table 1 Inorder to identify the dynamical behavior frequency responseis simulated with the time step size of 01 s and zero initialconditions
41 The Undamped Gyroscopic Vibration Absorber In thecase of the base excitation with 119911 = 005 cos(120596
119899119905) Figure 5
shows the rotational speed curve for case 119896 = 1198681199001205962
1198992 It can
be seen that tip response of beam is effectively reduced overminimum rotational speed (Ωmin = 15850 rpm)
Figure 6 represents the frequency response curve of thebeam and gyro for cases Ωmin = 15850 rpm and 119896 = 119868
1199001205962
1198992
It presented that the displacement response is effectivelyreduced before the case 120596 = 120596
119899 But resonance occurs when
120596 = 120596119899 However over the resonance frequency reduction
of the vibration continues to reach the optimum scale atminimum rotational speed
42 The Damped Gyroscopic Vibration Absorber In the caseof the base excitation with 119911 = 005 cos(120596
119899119905) Figure 7 shows
the rotational speed curve for cases 119896 = 1198681199001205962
1198992 and 119888opt =
1198681199001205962
1198994120596119892The response of the beam is effectively reduced and
effect reaches low rotational speeds compared to undamped
gyrosWhen damping coefficient is zero the response of gyrocan jump into unstable zone at resonance as seen in Figure 5
It can be seen that the case of 119888opt = 1198681199001205962
1198994120596119892Nsdotmsdotsrad
is an optimumdamping coefficient which effectively reducedthe response of the beam at resonance shown in Figure 8When optimum damping coefficient is chosen the frequencyresponse of the beam can improve compared to Figures 5 and6 therefore cases 119896 = 119868
1199001205962
1198992 and 119888opt = 119868
1199001205962
1198994120596119892are chosen
to reach the optimum scale for minimum rotational speedAs a result it is shown that optimum values of the stiffnessand damping which connect two gyroscopic systems have asignificant effect on the the performance of the gyroscopicvibration absorberOn the other hand the performance of thesystem is improved as we increase the rotor speed as shownin Figure 9
5 Conclusions
The optimal parameters of the rotor speed the springand damper for the minimum responses of the gyroscopesand beam are studied This paper provides some analyticalequations to investigate these optimal parameters of a gyro-beam system The effectiveness is presented by computersimulations and the numerical results agree with the analyt-ical solutions From the consistency of the present study thefollowing conclusions are found
(1) Up to a certain rotor speed there is no mitigation inthe vibration of beam at free end But beyond this
8 Shock and Vibration
05
1
15
2
25
3D
ispla
cem
ent (
m)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
01020304050607080
05 1 15 2 25 30Ω (rpm)
(b)
Figure 5 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with the base excitation
of 119911 = 005 cos(120596119899119905)
0010203040506070809
1
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
5
10
15
20
25
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(b)
Figure 6 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with
the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
Disp
lace
men
t (m
)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
02468
101214161820
05 1 15 2 25 30Ω (rpm)
(b)
Figure 7 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892=
09Nmsrad with the base excitation of 119911 = 005 cos(120596119899119905)
as we increase the rotor speed the gyro system hassignificantly reduced the vibration of beam Hencethis value is selected as the minimum rotor speed(Ωmin = 08911(120596
1198991205741199111198681199011198665)) The rotary inertia of
the rotor can be reduced by increasing rotor speedwhich is proportional to the mass of disk Thereforethe weight and volume of the system can be reduced
(2) There exist optimum parameters for the spring anddamper for minimum response of the beam Thestiffness of the spring and damper affect the per-formance of gyroscopes The gyroscopes can jumpinto unstable zone when the stiffness is not takenproperly Optimum spring and damper parametersfor minimum response are obtained from frequency
Shock and Vibration 9
0
005
01
015
02
025
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
0
2
4
6
8
10
(b)
Figure 8 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and
119888opt = 1198681199001205962
1198994120596119892= 09Nmsrad with the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
3
Disp
lace
men
t (m
)
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
2
4
6
8
10
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(b)
Figure 9 Frequency response curves for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892
= 09Nmsrad tip response of beam (a) gyroresponse (b) for (o) Ω = 0 rpm (+) Ω = 7500 rpm and (◻)Ω = 10000 rpm with the base excitation of 119911 = 005 cos(120596119905)
equation of beam The minimum displacement hav-ing optimum spring coefficient should be chosen foroptimal damper at the resonance frequency Thensetting 120596 = 120596
119892to eliminate the instability due
to the natural frequency of the added gyro-springsystem results in optimal damping Coupling thegyroscopes with the optimal spring (119896 = 119868
1199001205962
1198992) and
damper (119888 = 1198681199001205962
1198994120596119892) is a practical and effective
approach to mitigate the undesired motions of beamand gyroscopes
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This study was mainly supported by the Scientific and Tech-nological Research Council of Turkey (TUBITAK) underGrant no 114M760
References
[1] T K Datta ldquoA state-of the-art review on active control ofstructuresrdquo ISET Journal of Earthquake Technology Paper No430 vol 40 no 1 pp 1ndash17 2003
[2] G W Housner L A Bergman T K Caughey et al ldquoStruc-tural control past present and futurerdquo Journal of EngineeringMechanics vol 123 no 9 pp 897ndash971 1997
[3] T T Soong Active Structural Control Theory and PracticeLongman Scientific and Technical New York NY USA 1990
[4] B F Spencer Jr and M K Sain ldquoControlling buildings a newfrontier in feedbackrdquo IEEEControl SystemsMagazine vol 17 no6 pp 19ndash35 1997
[5] T Kobori ldquoPast present and future in seismic response controlin civil engineering structuresrdquo in Proceedings of the 3rd WorldConference on Structural Control pp 9ndash14 Wiley New YorkNY USA 2003
[6] T T Soong and B F Spencer Jr ldquoSupplemental energy dissi-pation state-of-the-art and state-of-the-practicerdquo EngineeringStructures vol 24 no 3 pp 243ndash259 2002
[7] B F Spencer Jr ldquoCivil engineering applications of smartdamping technologyrdquo in Proceedings of the 5th International
10 Shock and Vibration
Conference on Vibration Engineering pp 771ndash782 NanjingChina 2002
[8] T T Soong andG F DargushPassive EnergyDissipation Systemin Structural Engineering Wiley New York NY USA 1997
[9] N C Townsend A J Murphy and R A Shenoi ldquoA new activegyrostabiliser system for ride control of marine vehiclesrdquoOceanEngineering vol 34 no 11-12 pp 1607ndash1617 2007
[10] BThornton TUra YNose and S Turnock ldquoInternal actuationof underwater robots using control moment gyrosrdquo in Proceed-ings of the IEEE OCEANS Conference vol 1 pp 591ndash598 BrestFrance June 2005
[11] T Perez and P Steinmann ldquoAnalysis of ship roll gyrostabilisercontrolrdquo in Proceedings of the 8th IFAC Conference on Manoeu-vring and Control of Marine Craft pp 310ndash315 Guaruja BrazilSeptember 2009
[12] E O Schlick ldquoDevice for minimising the oscillatory move-ments of shipsrdquo Patent US769 493 1904
[13] E O Schlick ldquoThe gyroscopic effect of flywheels on board shiprdquoTransactions of the Institute of Naval Architects vol 23 pp 117ndash134 1904
[14] F Unker andO Cuvalcı ldquoNonlinearmotion control of a columnusing a coupled gyroscoperdquo ProcediamdashSocial and BehavioralSciences vol 195 pp 2242ndash2252 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Shock and Vibration
05
1
15
2
25
3D
ispla
cem
ent (
m)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
01020304050607080
05 1 15 2 25 30Ω (rpm)
(b)
Figure 5 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with the base excitation
of 119911 = 005 cos(120596119899119905)
0010203040506070809
1
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
5
10
15
20
25
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(b)
Figure 6 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad with
the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
Disp
lace
men
t (m
)
times104
05 1 15 2 25 30Ω (rpm)
(a)
120579(r
ad)
times104
02468
101214161820
05 1 15 2 25 30Ω (rpm)
(b)
Figure 7 Rotational speed response curves tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892=
09Nmsrad with the base excitation of 119911 = 005 cos(120596119899119905)
as we increase the rotor speed the gyro system hassignificantly reduced the vibration of beam Hencethis value is selected as the minimum rotor speed(Ωmin = 08911(120596
1198991205741199111198681199011198665)) The rotary inertia of
the rotor can be reduced by increasing rotor speedwhich is proportional to the mass of disk Thereforethe weight and volume of the system can be reduced
(2) There exist optimum parameters for the spring anddamper for minimum response of the beam Thestiffness of the spring and damper affect the per-formance of gyroscopes The gyroscopes can jumpinto unstable zone when the stiffness is not takenproperly Optimum spring and damper parametersfor minimum response are obtained from frequency
Shock and Vibration 9
0
005
01
015
02
025
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
0
2
4
6
8
10
(b)
Figure 8 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and
119888opt = 1198681199001205962
1198994120596119892= 09Nmsrad with the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
3
Disp
lace
men
t (m
)
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
2
4
6
8
10
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(b)
Figure 9 Frequency response curves for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892
= 09Nmsrad tip response of beam (a) gyroresponse (b) for (o) Ω = 0 rpm (+) Ω = 7500 rpm and (◻)Ω = 10000 rpm with the base excitation of 119911 = 005 cos(120596119905)
equation of beam The minimum displacement hav-ing optimum spring coefficient should be chosen foroptimal damper at the resonance frequency Thensetting 120596 = 120596
119892to eliminate the instability due
to the natural frequency of the added gyro-springsystem results in optimal damping Coupling thegyroscopes with the optimal spring (119896 = 119868
1199001205962
1198992) and
damper (119888 = 1198681199001205962
1198994120596119892) is a practical and effective
approach to mitigate the undesired motions of beamand gyroscopes
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This study was mainly supported by the Scientific and Tech-nological Research Council of Turkey (TUBITAK) underGrant no 114M760
References
[1] T K Datta ldquoA state-of the-art review on active control ofstructuresrdquo ISET Journal of Earthquake Technology Paper No430 vol 40 no 1 pp 1ndash17 2003
[2] G W Housner L A Bergman T K Caughey et al ldquoStruc-tural control past present and futurerdquo Journal of EngineeringMechanics vol 123 no 9 pp 897ndash971 1997
[3] T T Soong Active Structural Control Theory and PracticeLongman Scientific and Technical New York NY USA 1990
[4] B F Spencer Jr and M K Sain ldquoControlling buildings a newfrontier in feedbackrdquo IEEEControl SystemsMagazine vol 17 no6 pp 19ndash35 1997
[5] T Kobori ldquoPast present and future in seismic response controlin civil engineering structuresrdquo in Proceedings of the 3rd WorldConference on Structural Control pp 9ndash14 Wiley New YorkNY USA 2003
[6] T T Soong and B F Spencer Jr ldquoSupplemental energy dissi-pation state-of-the-art and state-of-the-practicerdquo EngineeringStructures vol 24 no 3 pp 243ndash259 2002
[7] B F Spencer Jr ldquoCivil engineering applications of smartdamping technologyrdquo in Proceedings of the 5th International
10 Shock and Vibration
Conference on Vibration Engineering pp 771ndash782 NanjingChina 2002
[8] T T Soong andG F DargushPassive EnergyDissipation Systemin Structural Engineering Wiley New York NY USA 1997
[9] N C Townsend A J Murphy and R A Shenoi ldquoA new activegyrostabiliser system for ride control of marine vehiclesrdquoOceanEngineering vol 34 no 11-12 pp 1607ndash1617 2007
[10] BThornton TUra YNose and S Turnock ldquoInternal actuationof underwater robots using control moment gyrosrdquo in Proceed-ings of the IEEE OCEANS Conference vol 1 pp 591ndash598 BrestFrance June 2005
[11] T Perez and P Steinmann ldquoAnalysis of ship roll gyrostabilisercontrolrdquo in Proceedings of the 8th IFAC Conference on Manoeu-vring and Control of Marine Craft pp 310ndash315 Guaruja BrazilSeptember 2009
[12] E O Schlick ldquoDevice for minimising the oscillatory move-ments of shipsrdquo Patent US769 493 1904
[13] E O Schlick ldquoThe gyroscopic effect of flywheels on board shiprdquoTransactions of the Institute of Naval Architects vol 23 pp 117ndash134 1904
[14] F Unker andO Cuvalcı ldquoNonlinearmotion control of a columnusing a coupled gyroscoperdquo ProcediamdashSocial and BehavioralSciences vol 195 pp 2242ndash2252 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 9
0
005
01
015
02
025
Disp
lace
men
t (m
)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
(a)
120579(r
ad)
1 2 3 4 5 6 7 8 9 100Forcing frequency 120596 (rads)
0
2
4
6
8
10
(b)
Figure 8 Frequency response curves for Ωmin = 15850 rpm tip response of beam (a) gyro response (b) for 119896 = 1198681199001205962
1198992 = 64Nmrad and
119888opt = 1198681199001205962
1198994120596119892= 09Nmsrad with the base excitation of 119911 = 005 cos(120596119905)
05
1
15
2
25
3
Disp
lace
men
t (m
)
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(a)
120579(r
ad)
0
2
4
6
8
10
42 44 46 48 5 52 54 56 58 64Forcing frequency 120596 (rads)
(b)
Figure 9 Frequency response curves for 119896 = 1198681199001205962
1198992 = 64Nmrad and 119888opt = 119868
1199001205962
1198994120596119892
= 09Nmsrad tip response of beam (a) gyroresponse (b) for (o) Ω = 0 rpm (+) Ω = 7500 rpm and (◻)Ω = 10000 rpm with the base excitation of 119911 = 005 cos(120596119905)
equation of beam The minimum displacement hav-ing optimum spring coefficient should be chosen foroptimal damper at the resonance frequency Thensetting 120596 = 120596
119892to eliminate the instability due
to the natural frequency of the added gyro-springsystem results in optimal damping Coupling thegyroscopes with the optimal spring (119896 = 119868
1199001205962
1198992) and
damper (119888 = 1198681199001205962
1198994120596119892) is a practical and effective
approach to mitigate the undesired motions of beamand gyroscopes
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This study was mainly supported by the Scientific and Tech-nological Research Council of Turkey (TUBITAK) underGrant no 114M760
References
[1] T K Datta ldquoA state-of the-art review on active control ofstructuresrdquo ISET Journal of Earthquake Technology Paper No430 vol 40 no 1 pp 1ndash17 2003
[2] G W Housner L A Bergman T K Caughey et al ldquoStruc-tural control past present and futurerdquo Journal of EngineeringMechanics vol 123 no 9 pp 897ndash971 1997
[3] T T Soong Active Structural Control Theory and PracticeLongman Scientific and Technical New York NY USA 1990
[4] B F Spencer Jr and M K Sain ldquoControlling buildings a newfrontier in feedbackrdquo IEEEControl SystemsMagazine vol 17 no6 pp 19ndash35 1997
[5] T Kobori ldquoPast present and future in seismic response controlin civil engineering structuresrdquo in Proceedings of the 3rd WorldConference on Structural Control pp 9ndash14 Wiley New YorkNY USA 2003
[6] T T Soong and B F Spencer Jr ldquoSupplemental energy dissi-pation state-of-the-art and state-of-the-practicerdquo EngineeringStructures vol 24 no 3 pp 243ndash259 2002
[7] B F Spencer Jr ldquoCivil engineering applications of smartdamping technologyrdquo in Proceedings of the 5th International
10 Shock and Vibration
Conference on Vibration Engineering pp 771ndash782 NanjingChina 2002
[8] T T Soong andG F DargushPassive EnergyDissipation Systemin Structural Engineering Wiley New York NY USA 1997
[9] N C Townsend A J Murphy and R A Shenoi ldquoA new activegyrostabiliser system for ride control of marine vehiclesrdquoOceanEngineering vol 34 no 11-12 pp 1607ndash1617 2007
[10] BThornton TUra YNose and S Turnock ldquoInternal actuationof underwater robots using control moment gyrosrdquo in Proceed-ings of the IEEE OCEANS Conference vol 1 pp 591ndash598 BrestFrance June 2005
[11] T Perez and P Steinmann ldquoAnalysis of ship roll gyrostabilisercontrolrdquo in Proceedings of the 8th IFAC Conference on Manoeu-vring and Control of Marine Craft pp 310ndash315 Guaruja BrazilSeptember 2009
[12] E O Schlick ldquoDevice for minimising the oscillatory move-ments of shipsrdquo Patent US769 493 1904
[13] E O Schlick ldquoThe gyroscopic effect of flywheels on board shiprdquoTransactions of the Institute of Naval Architects vol 23 pp 117ndash134 1904
[14] F Unker andO Cuvalcı ldquoNonlinearmotion control of a columnusing a coupled gyroscoperdquo ProcediamdashSocial and BehavioralSciences vol 195 pp 2242ndash2252 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 Shock and Vibration
Conference on Vibration Engineering pp 771ndash782 NanjingChina 2002
[8] T T Soong andG F DargushPassive EnergyDissipation Systemin Structural Engineering Wiley New York NY USA 1997
[9] N C Townsend A J Murphy and R A Shenoi ldquoA new activegyrostabiliser system for ride control of marine vehiclesrdquoOceanEngineering vol 34 no 11-12 pp 1607ndash1617 2007
[10] BThornton TUra YNose and S Turnock ldquoInternal actuationof underwater robots using control moment gyrosrdquo in Proceed-ings of the IEEE OCEANS Conference vol 1 pp 591ndash598 BrestFrance June 2005
[11] T Perez and P Steinmann ldquoAnalysis of ship roll gyrostabilisercontrolrdquo in Proceedings of the 8th IFAC Conference on Manoeu-vring and Control of Marine Craft pp 310ndash315 Guaruja BrazilSeptember 2009
[12] E O Schlick ldquoDevice for minimising the oscillatory move-ments of shipsrdquo Patent US769 493 1904
[13] E O Schlick ldquoThe gyroscopic effect of flywheels on board shiprdquoTransactions of the Institute of Naval Architects vol 23 pp 117ndash134 1904
[14] F Unker andO Cuvalcı ldquoNonlinearmotion control of a columnusing a coupled gyroscoperdquo ProcediamdashSocial and BehavioralSciences vol 195 pp 2242ndash2252 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of