-
Risers, Pipelines & Subsea Systems
Reducing Uncertainty & Gaining Confidence by Monitoring
Tze King Lim, Hugh Howells
AOG 2015, Perth
12th March 2015
-
Agenda
� Introduction – Fatigue Sources and Uncertainties
� Selecting Correct Instrumentation
� Getting Best Value from Measurements
� Screening
� Filtering
� Conversion to Useful Parameters
� Correlation with Environment
� Benefits
� Conclusions
Applicable to all subsea systems subjected to cyclic loads3 of
32
-
Wellhead and Conductor Fatigue
4 of 32
-
Fatigue Failure
� West of Shetland Region, 440m depth
� Reference DOT paper 1983, C. Hopper, Britoil
� Risk increasing due to larger BOP stacks, longer well
duration
5 of 32
-
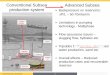
Fatigue Sources
� Riser motions from:
� Wave loads on riser
� Wave-induced vessel motions
� VIV (Vortex Induced Vibrations)
� Internal flow e.g. slugging
� VIV of pipeline and jumper spans
� Transportation and installation
Vessel motions
6 of 32
-
7 of 32
Example Components
Infield and riser base spools, tree connectors: VIV,
slugging
Pipeline spans: VIV, slugging
Jacket platforms and conductors: waves, VIV
Mid-water flow bundles: towing, installation, in-place
waves & VIV
-
Introduction – Causes of Uncertainties
� Variability and unknowns exist in:
� Metocean conditions – not all waves/currents in metocean
reports will be seen during drilling
� Vessel motions – vessel heading
� Hydrodynamic properties – drag coefficients, damping
� Soil strength – range of strengths specified
� Well installation – stickup, cement shortfall, casing
preload
� Internal fluids – density variations, flow regimes
� Fatigue details – S-N curves and SCFs
� Large uncertainties exist
8 of 32
-
Case Study – Conductor Connector, North West Shelf
Analysis Parameter
Input Giving Low
Fatigue Damage
Input Giving High
Fatigue Damage
Factor ofChange in
Fatigue Damage
Soil strength Stiff soil Soft soil 2.2
Wave dataDifferent combination of
waves during drilling1.5
Vessel heading -10% surge +10% surge 2.2
Structural damping 0.3% 0% 2.5
Background current 0.2m/s 0m/s 51.6
Drag coefficient 1.2 1.0 2.9
Wellhead stickup 2.5m 3.5m 17.9
Cement level around conductor No shortfall 2m shortfall 1.59 of
32
-
Introduction – Approach to Fatigue Design
� Conservative parameters considered in analysis
� Large safety factors (e.g. 10)
� Design code objective to obtain target probability of failure
(~10-5)
10 of 32
-
Calculated Fatigue Damage vs Fatigue Resistance
A < B
FSF
11 of 32
-
To gain the best value from monitoring, we need:
Robust Instrument Selection
Execute Monitoring Campaign
Accurate Data
Processing
Correlation with
Environment
Feedback into Future
Design
Monitoring Steps
*not in this presentation
Wellhead and
Conductor Design
12 of 32
-
Instrument Selection
� Understand expected behaviour based on analysis predictions:
what are range of motions?
� What parameters to monitor – acceleration, angular rates,
strain?
� What accuracy is required?
� What uncertainties will be introduced from monitoring system:
calibration error, resolution, noise
� Testing to verify calibration and noise
13 of 32
-
Instrument Selection Case Study -Accelerometers
More precision required for worse fatigue detail
Sensor noise level
with filtering
14 of 32
-
Instrument Selection Case Study –Angular Rate Sensors
Sensor noise level
with filtering
Angular rate sensors
selected in this example
– better signal to
noise ratio
15 of 32
-
Data Processing Steps
Data Management
ScreeningData
Correction
Inspect Frequency Spectra
FilteringConversion to Useful
Parameters
Robust Instrument Selection
Execute Monitoring Campaign
Accurate Data
Processing
Correlation with
Environment
Feedback into Future
Design
Wellhead and
Conductor Design
16 of 32
-
Data Management Challenges
� Large volumes of data are collected:
� 1 motion measurement device, 3 accelerometer, 2 angular rate,
1 temperature for 1 year = 2.4 Gb
� How and where to store?
� Providing reliable access to data and results
� Handover responsibility with change in personnel
17 of 32
-
Screening
� High level review of data
� Checks that instrument is working as expected
� Data collected is in line with expectations
� Identify events with significant motions to be investigated
further
18 of 32
-
Screening Case Study
Events to investigate
further
19 of 32
-
Data Correction
� Gravity correction:
� Component of gravity is measured by accelerometers when
inclined
� Results in over or under-prediction of fatigue depending on
deflected shape
� Unexpected Responses – remove measurements of installation
/retrieval, drilling vibration, impacts
� Clock Drift – needed if data from multiple devices are
combined
� Temperature Drift – calibration changes with temperature
L o g g e r o n U n d e fo rm e d R is e r
θ
g a
A c c e le ra t io n s a t P e a k R is e r D e fo rm a t io
n
θ
g c o s θ
M e a s u re d A c c e le ra t io n s a t P e a k R is e r D e
fo rm a t io n
g -C o n ta m in a te d A c c e le ra t io n
a + g s in θ θ
20 of 32
-
Inspect Frequency Spectra
21 of 32
-
Angula
r ra
te (
deg/s
)
Filtering
High pass –remove drift
Low pass: remove noise
� Noise affects magnitude of measurements and introduce
errors
� Integration amplifies error at low frequencies
� Uncertainty in fatigue life is ^3 or ^4 uncertainty in
stress
� Noise can be minimised by correct filtering
22 of 32
-
Filtering Case Study – 10Hz Sampling Rate
� 10Hz sampling rateFiltering Method
Signal to Noise Ratio
Measured Parameter
Integrated Parameter
Double Integrated Parameter
No filtering 3.60 1.25 0.01
Averaging over 1s (slow varying parameters)
11.38 - -
Low pass (f>1Hz removed) 8.00 1.25 0.01
High pass (f1Hz and
-
Conversion to Useful Parameters
Measured parameters: accelerations, angular rates, curvature
Stress range & number of cycles
Accumulated fatigue damage & remaining fatigue life
Is it safe to continue operations?
Is the component performance up to spec?
When is it recommended to inspect?
Can unplanned workover be performed?
Can service life be extended?
Transfer functions, fatigue details
Calibration
Feed into operations
24 of 32
-
Example Conversion to Accumulated Fatigue
25 of 32Most fatigue accumulated during few events with large
waves
-
Correlation with Environment
� Compare wave and VIV motion measurements with environmental
conditions
� Compare slugging motion measurements with flow conditions
� Allows calibration of analysis models and reduces
conservatisms
26 of 32
-
Assessing Conservatism
Probability of fatigue failure revised
Bias in measurement mean vs design
27 of 32
-
Effects of Reducing Uncertainty
Probability of fatigue failure reduced
Variability reduced
28 of 32Reliability analysis can be used to justify less
conservative design
-
Example Calibration of VIV Parameters
� Calculated VIV fatigue is conservative compared to calculated
VIV
� Adjusted input parameters which are less conservative can be
justified
� Ref: M. Tognarelli, S. Taggart (BP), M. Campbell (2H) –
“Actual VIV Fatigue Response of Full Scale Drilling Risers: With
and Without Suppression Devices”, OMAE 2008 29 of 32
-
Feedback into Present and Future Design
� Final step is to implement the findings from monitoring:
� Refined fatigue lives for present wells
� Optimised wellhead and conductor for future wells
� Justified reduction in safety factors
� Use calibrated analysis models for future wells
� Enables cost savings
-
Conclusions
� To obtain best value from monitoring, the following is
required:
� Robust instrument selection
� Accurate data processing methods
� Correlation with metocean/internal fluid conditions
� Feedback into ongoing inspections and future design
� Benefits:
� Justify less demanding safety factors
� Reduce over-design
� Reduce costs
� Calibrated models – better predictions for future design
31 of 32
-
Questions?
Further information:
2H Offshore Engineering
www.2hoffshore.com
+61 8 9222 5000












![37424265 Directed Studies Subsea Pipelines[1]](https://img.pdfslide.net/doc/110x75/544c8b3faf7959eb138b4638/37424265-directed-studies-subsea-pipelines1.jpg)














