Embed Size (px)
DESCRIPTION
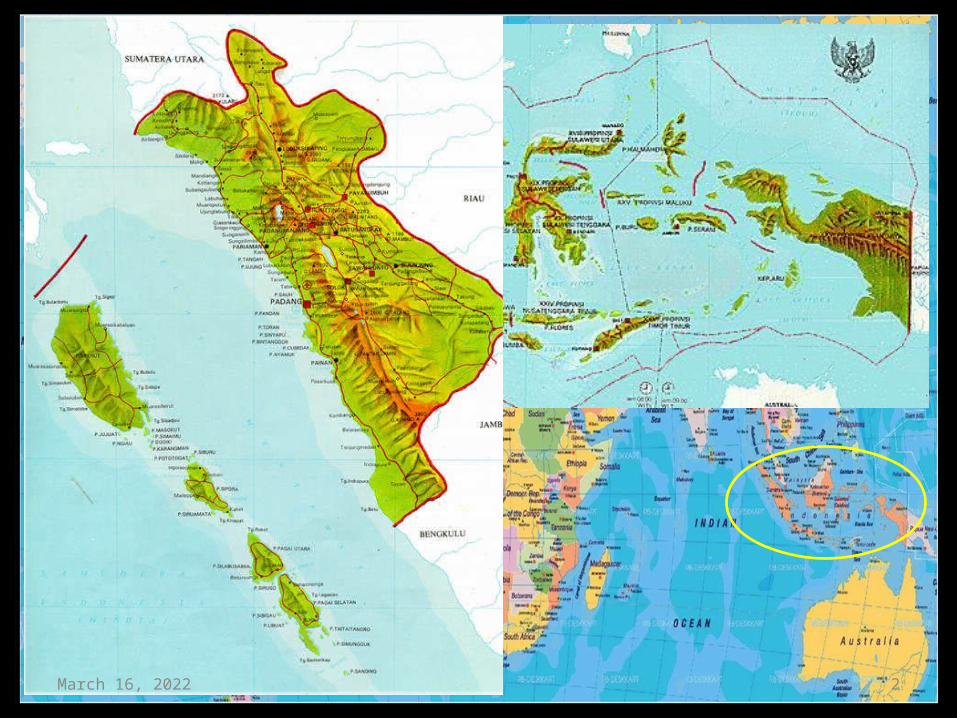
Risfendra. da 220210. Rendang 'West Sumatran caramelized beef curry‘. In 2011 an online poll by 35,000 people held by CNN International chose Rendang as the number one dish of their 'World’s 50 Most Delicious Foods list. ( http://en.wikipedia.org/wiki/Rendang ). Seminar Class. Risfendra. - PowerPoint PPT Presentation
Citation preview

April 21, 2023 1

April 21, 2023 3

April 21, 2023 4
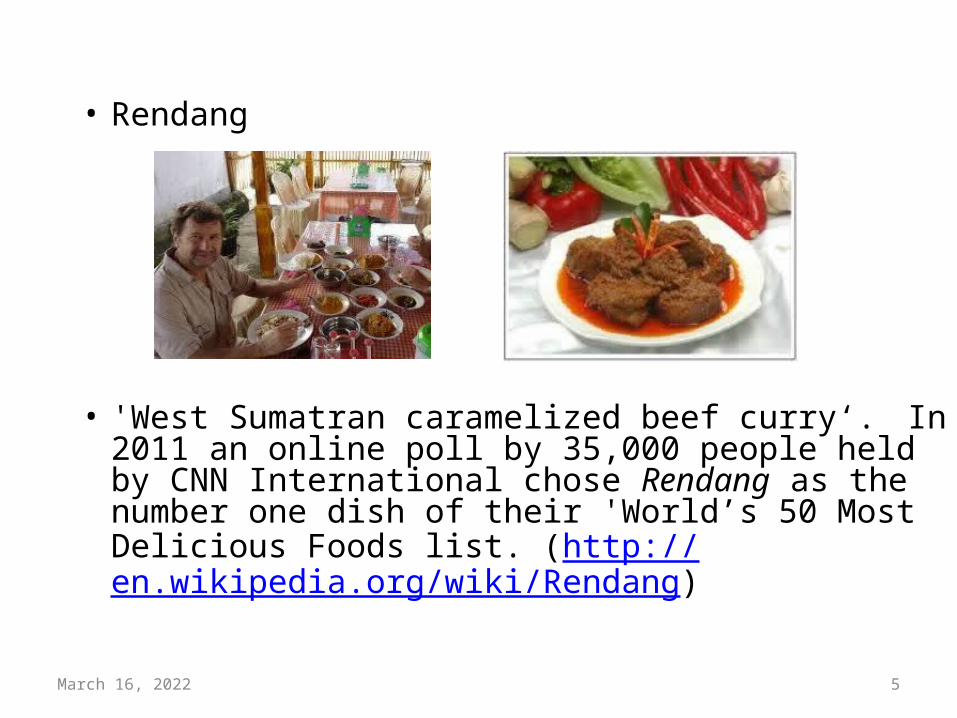
• Rendang
• 'West Sumatran caramelized beef curry‘. In 2011 an online poll by 35,000 people held by CNN International chose Rendang as the number one dish of their 'World’s 50 Most Delicious Foods list. (http://en.wikipedia.org/wiki/Rendang)
April 21, 2023 5

April 21, 2023 6
Teaching Activity
Industrial Automation Workshop
PLC-based Automation
Microcontroller, Mechatronics/Robotics
April 21, 2023 7
Professional Course
PLC-based Automation Upgrading course for Vocational High School Teacher.
April 21, 2023 8

9
Professional Course
Governor Automatic Control and SCADA OJT for State Electricity Company Employee
April 21, 2023
Research Activity• Decision Making Algorithm on Keeper Robot soccer.
Indonesian Symposium on Robot Soccer Competision. ISRSC (2013)
• PC-based identification and PID controller Design for Temperature Process Control Trainer (2010-2011)
• Implementation of Fuzzy Logic for tuning PI controller in Motor DC speed control system (2009)
• Design and Implementation of Robust Cascade Controller for Pressure Control Trainer (Feedback 38-714). (2008)
April 21, 2023 10
Design and Implemetation of Robust Cascade Controller Design and Implemetation of Robust Cascade Controller for Pressure Control Trainer (Feedback 38-714).for Pressure Control Trainer (Feedback 38-714).
ABSTRACTABSTRACT
This research aim to design and implement cascade controller in pressure control trainer, Feedback 38-714. The device has been equipped with PID controller which is a single-loop controller structure applied widely in industry. The controller is easily implemented and relatively easy in tuning. However, in the other hand, it is unable to reduce load disturbance effect. In process control system, load disturbance becomes a main problem. Cascade control can be used to overcome the problem. To guarantee closed-loop system stability while plant parameters changing happen due to load disturbance, the cascade controller is designed to achieve robust H-infinity criterion.
Cascade control design in this research uses classical method approach. The objective design is to guarantee closed-loop system stability and performance while load disturbance occurs. The controller gained is simulated and implemented to the real plant Pressure Control Trainer (Feedback 38-714).
The simulation result shown that design of closed-loop system has achieved robust stability criteria based on small gain theorem. So, the system stability can be guaranteed due to plant parameters changing. The implementation result shown that closed-loop system was able to reach set-point while plant parameters changing happen due to load disturbance.
Key words : cascade control, H-infinity, pressure control trainer, robust, uncertainty
11April 21, 2023
12April 21, 2023
13
IntroductionWide application of ELECTRO-PNEUMATIK System in Industry• Explosive resistant• Simplicity• Easy Maintenance
April 21, 2023
Technology Performance Plant parameters changes stability Load changes stability Steady-state error ≈ 0 Overshoot ≈ 0
April 21, 2023 14
single loop Structure of PID controllerProportionalProportionalIntegralIntegralDifferentialDifferential
Industrial automation standard, because the benefits are easy to implement and relatively easy to be tuned
The disadvantage • unable to eliminate disturbances• unable to maintain the desired criteria on various
system parameter changes.
Introduction…
15
Cascade control StructureCascade control Structure• Effective for disturbances reductionEffective for disturbances reduction• Improve response system performanceImprove response system performance
April 21, 2023
Problem
Plant parameter ChangesPlant parameter Changes Model UncertaintiesModel Uncertainties
Solutions
Robust Cascade Robust Cascade ControlControl

April 21, 2023 16
Research aims:
Design interface circuit for model identification and control Obtain model of Pressure Control Trainer Feedback 38-714
with model identification Design cascade controller refer to robust H-infinity criteria Controller Implementation to Pressure Control Trainer
(Feedback 38-714) Robustness Analysis of closed-loop respon system to plant
parameter changes

April 21, 2023 17
Industrial standard component
signal conditioning (output:4-20mA) for each sensors
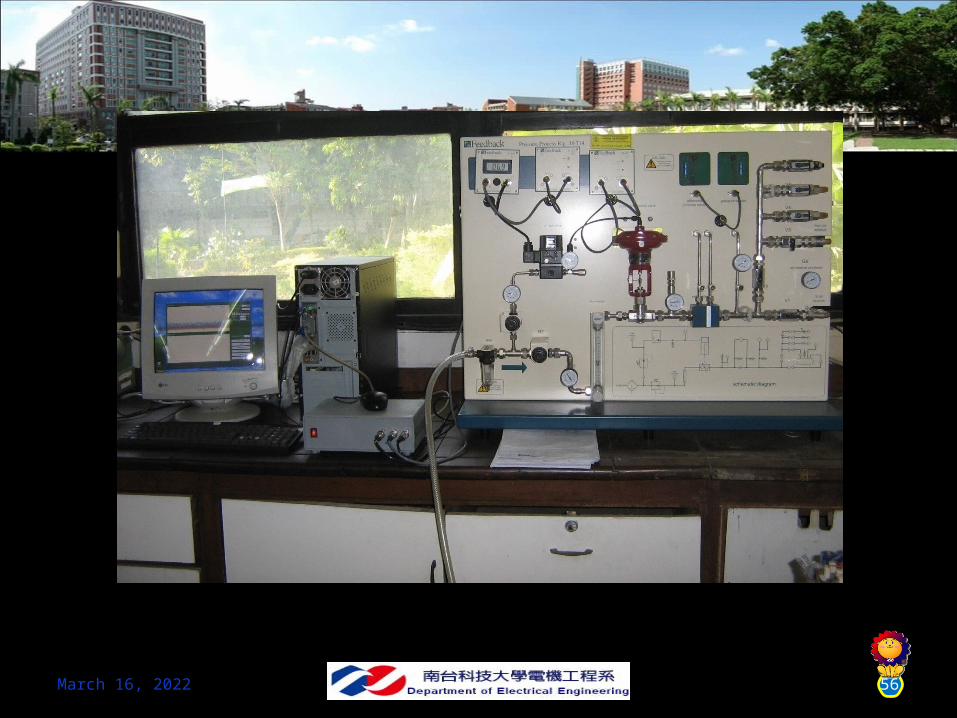
equipped with Pressure Sensor and Differential pressure sensor
Pressure Control Trainer (Feedback 38-714)Pressure Control Trainer (Feedback 38-714)
April 21, 2023 18
Struktur Kontrol Kaskade
• Tujuan kontroler kaskade (Luyben,1997):– Mengeliminasi pengaruh gangguan– Meningkatkan performansi sistem kontrol
• Requirement : inner loop respons >> outer loop respons
Gc1(s) G2(s) G1(s)-+ +
+
++
d2 d1
r2r1 e1 e2 u y2 y1
-+
Inner loop
Gc2(s)
Master / primaryMaster / primaryControllerController
auxiliary / auxiliary / secondarysecondaryControllerController
April 21, 2023 19
Robust Control (1)• Adanya ketidak pastian dalam pemodelan• Adanya perubahan parameter plant:
– Akibat usia pemakaian– Karena variasi operasional
• Obyektif Kontrol:– Sistem tetap kokoh dalam perubahan dinamika plant– Sistem tetap stabil dalam perubahan parameter plant– Memiliki gain tinggi pada frekuensi rendah setelah itu gain
kontroler turun dengan cepat setelah mencapai frekuensi crossover.
April 21, 2023 20
Robust Control (2)• Uncertainty:
– Additif:• Parallel dengan model nominal• Untuk uncertainty pada frekuensi tinggi• G + ∆
– Multiplicative:• Seri dengan model nominal• Untuk uncertainty pada frekuensi rendah• G ( I + ∆ ) = G + G∆
21
Robust Control (3)
121
112122 )(),( MMIMMMFU
April 21, 2023
• LFT (linear fractional transformation)– Untuk memodelkan variasi plant sebagai variabel gain linier
pada suatu feedback– Untuk memetakan ketidakpastian real plant ke dalam
kerangka matematik sistem linier• Upper LFT
• Lower LFT
211
221211 )(),( MMIKMMKMFL
April 21, 2023 22
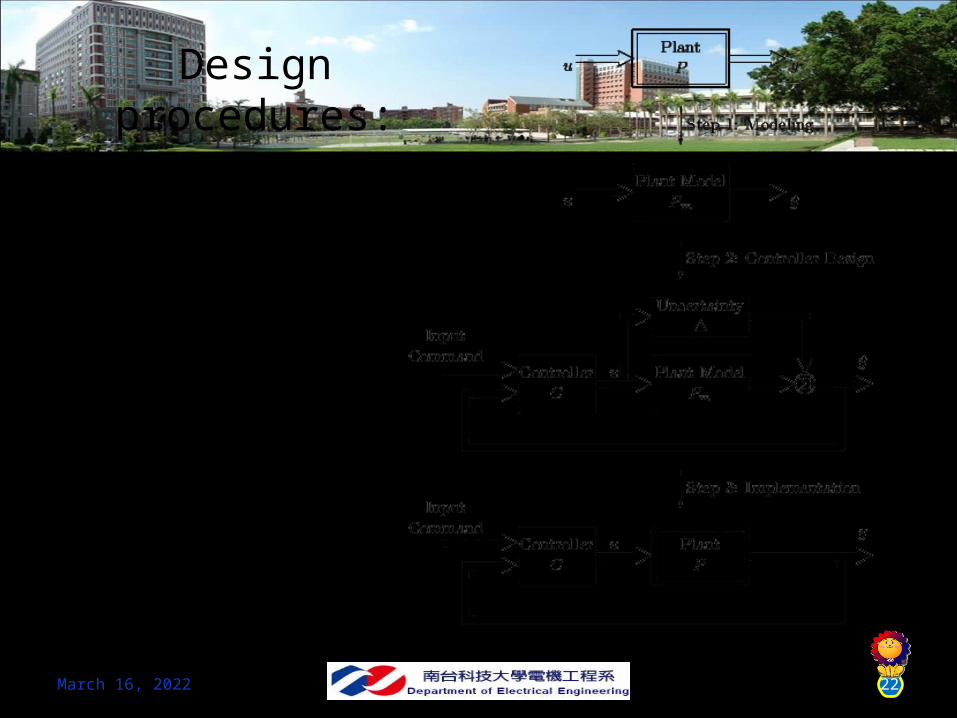
Design procedures:
April 21, 2023 23
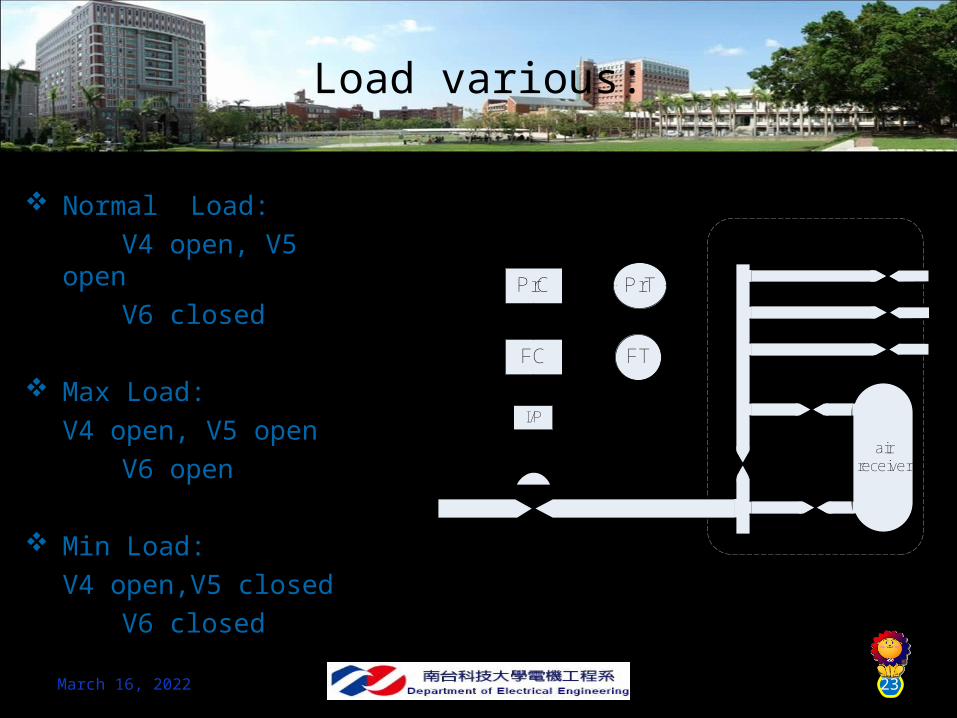
Load various:
PROCESS
FTFC
PrTPrC
control valve
airsupply
SP
auxiliary controller
airreceiver
V1
V2
V3
V4
V5
V6
I/P
Normal Load:Normal Load:
V4 open, V5 V4 open, V5 openopen
V6 closedV6 closed
Max Load:Max Load:
V4 open, V5 V4 open, V5 openopen
V6 openV6 open
Min Load:Min Load:
V4 open,V5 V4 open,V5 closedclosed
V6 closedV6 closed
April 21, 2023 24
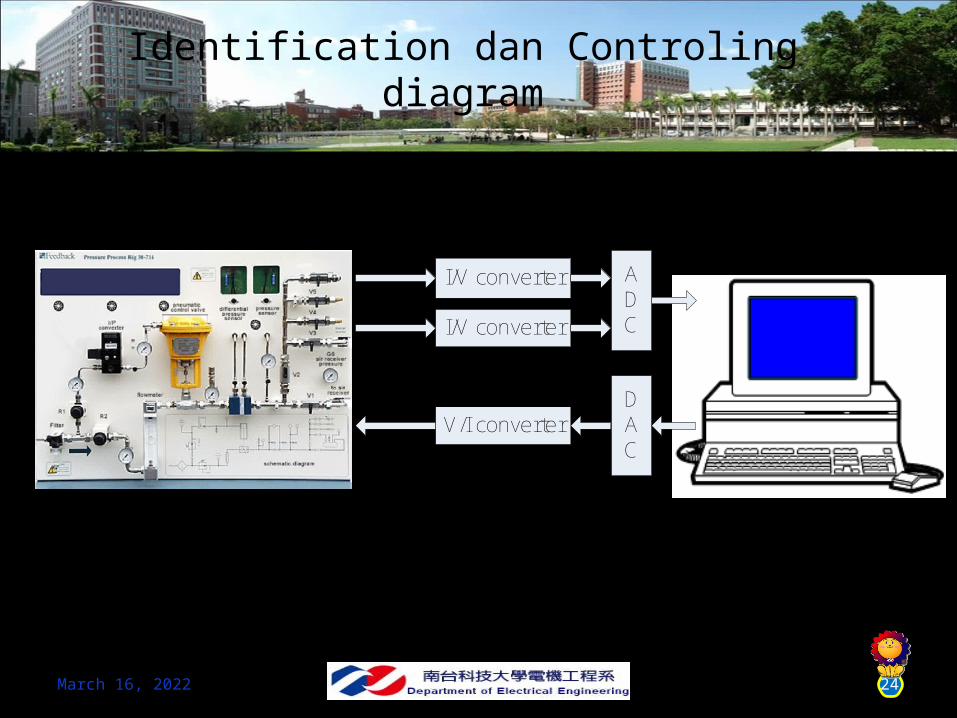
Identification dan Controling diagram
ComputerPressure Control Trainer Feedback 38-714
ADC
I/V converter
DAC
I/V converter
menujuI/P converter
dari sensor tekanan
dari sensor laju aliran
V/I converter
April 21, 2023 25
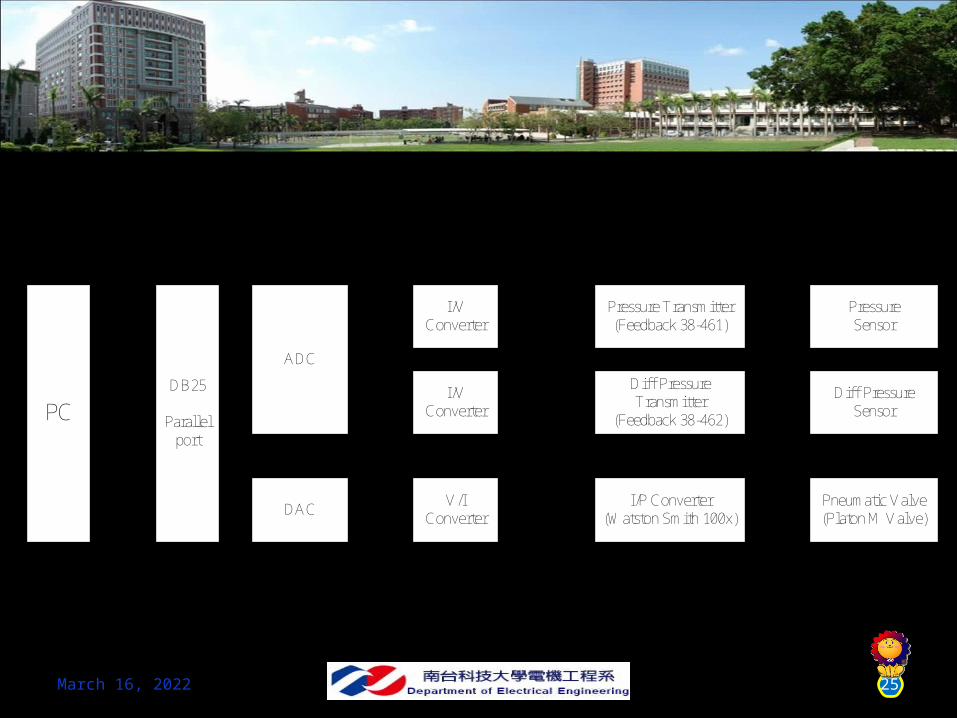
Pressure Transmitter(Feedback 38-461)
Diff PressureSensor
PressureSensor
Diff Pressure Transmitter
(Feedback 38-462)
ADC
I/VConverter
I/VConverter
DACV/I
ConverterI/P Converter
(Watston Smith 100x)Pneumatic Valve(Platon M Valve)
DB25
Parallel port
PC
Process Control Adapter
.
.
.
4-20 mA
4-20 mA
4-20 mA 3-15 psi
0-5 V
0-5 V
0-5 V
April 21, 2023 26
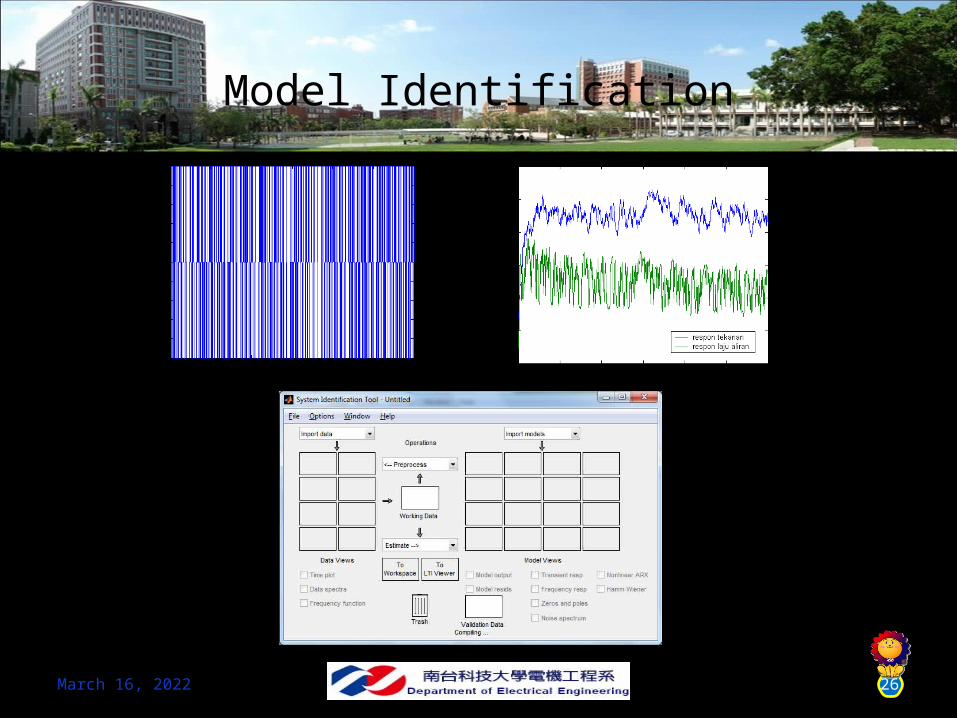
Model Identification
April 21, 202327
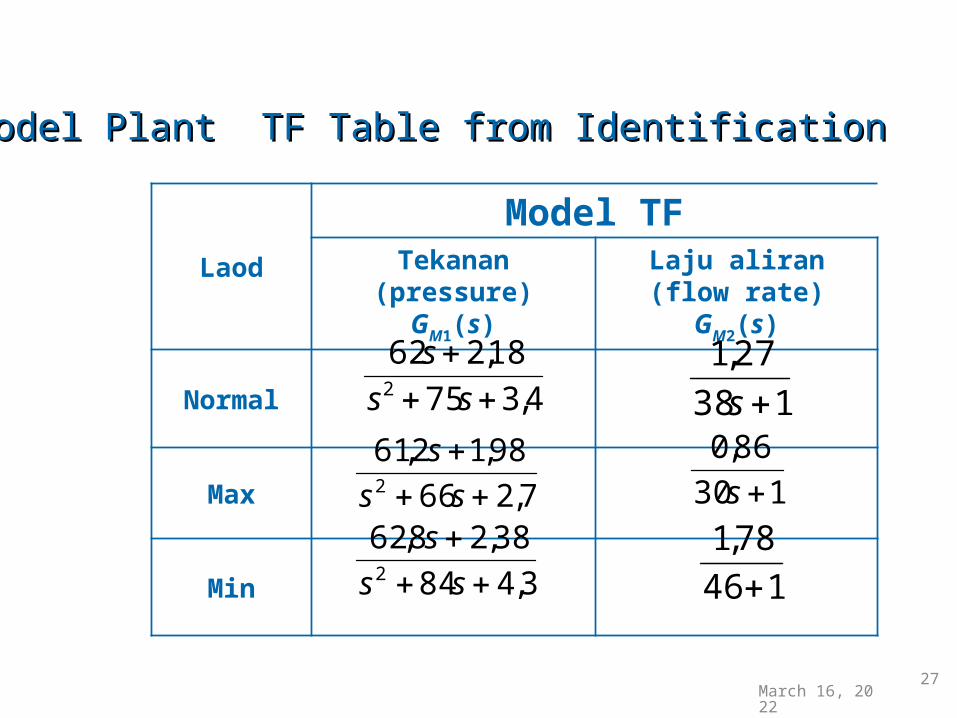
Laod
Model TFTekanan (pressure)
GM1(s)Laju aliran (flow rate)
GM2(s)
Normal
Max
Min
Model Plant TF Table from IdentificationModel Plant TF Table from Identification
4,375
18,2622
ss
s
7,266
98,12,612
ss
s
3,484
38,28,622
ss
s
138
27,1
s
130
86,0
s
146
78,1

April 21, 2023 28
Ketidakpastian Parameter Plant
1)(1
s
ksGM
78,186,0 k4630
(nominal 1,27)
(nominal 38)
122
3
122 )(
asasa
bsbsGM
8,622,61 2 b
38,298,1 1 b
8466 2 a
3,47,2 1 a
(nominal 62)
(nominal 2.18)
(nominal 75)
(nominal 3.4)
April 21, 2023 29
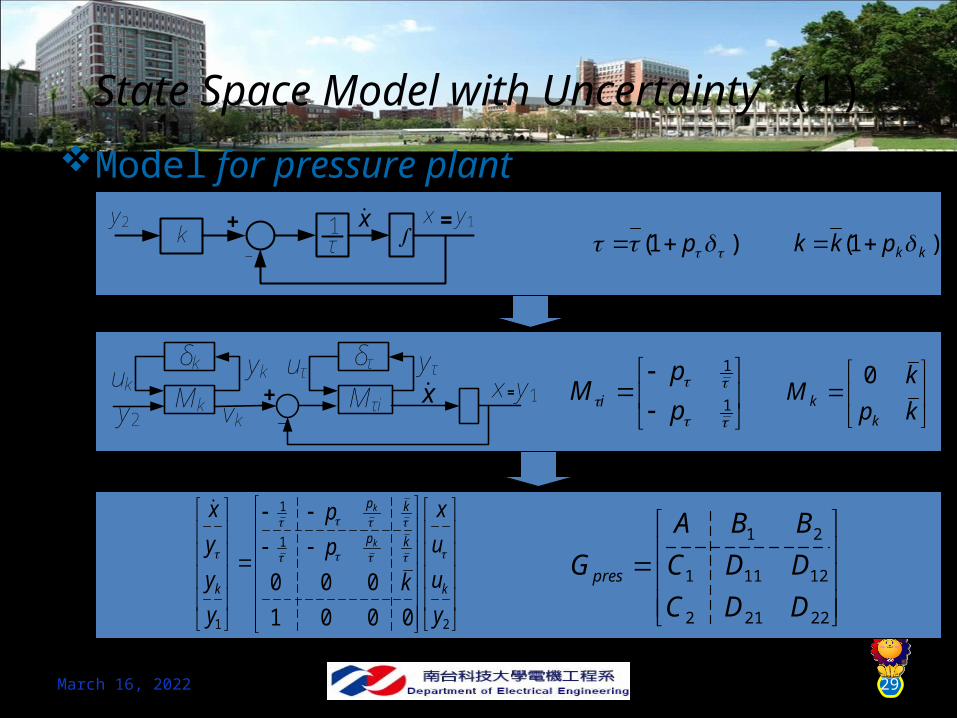
State Space Model with Uncertainty (1)
ky2
-
+ 1τ ∫
x x y1=)1( p )1( kkpkk
ModelModel for pressure plant for pressure plant
Mky2 -+ xMτi
δkuk
yk
vk
δτuτ yτx y1=
1
1
p
pM i
kp
kM
k
k
0
2
1
1
1 0001
000
y
u
u
x
k
p
p
y
y
y
x
k
kp
kp
k
k
k
22212
12111
21
DDC
DDC
BBA
G pres
April 21, 2023 30
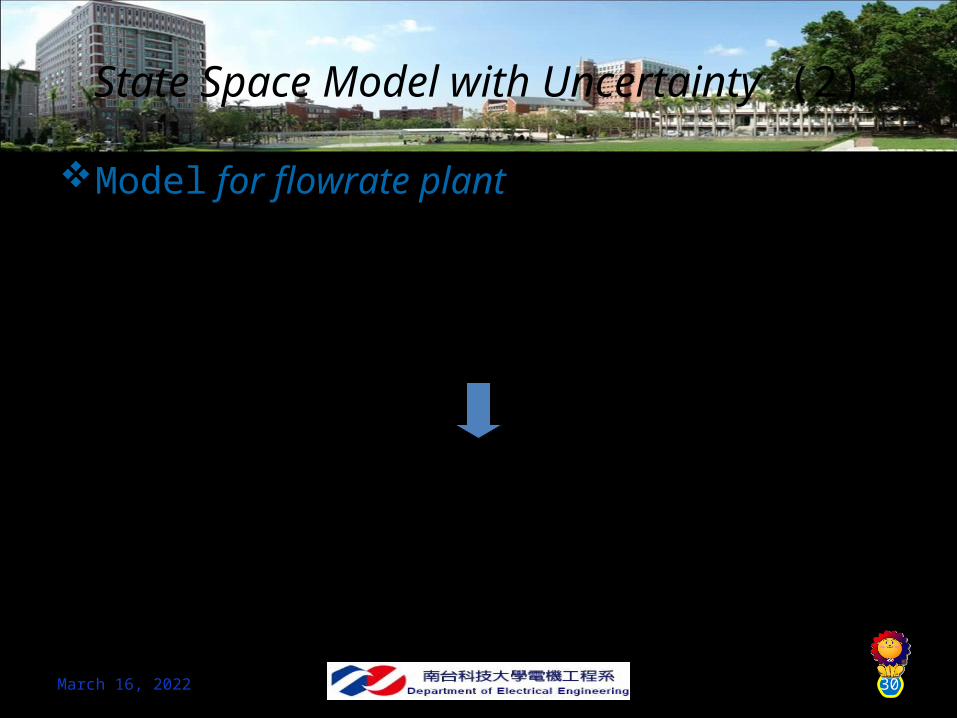
State Space Model with Uncertainty (2)
ModelModel for flowrate plant for flowrate plant
b1u
-+ ∫
1xb2
∫2x=2x
+
+
a1
a2+
+
x1 y2=
u -+ 1x 2x=2x
+
+
+
+ Ma2
δa2
Mb1
δb1ub1
yb1
δb2
Ma1
δa1
Mb2
ub2yb2
va1
vb2
va2
ya2
ya1
ua2
ua1
x1 y2=
),()1( 222222 bbU MFbpbbb ),()1( 111111 bbU MFbpbbb ),()1( 222222 aaU MFapaaa
),()1( 111111 aaU MFapaaa
22
22
0
bp
bM
bb
11
11
0
bp
bM
b
b
22
22
0
ap
aM
aa
11
11
0
ap
aM
aa
April 21, 2023 31
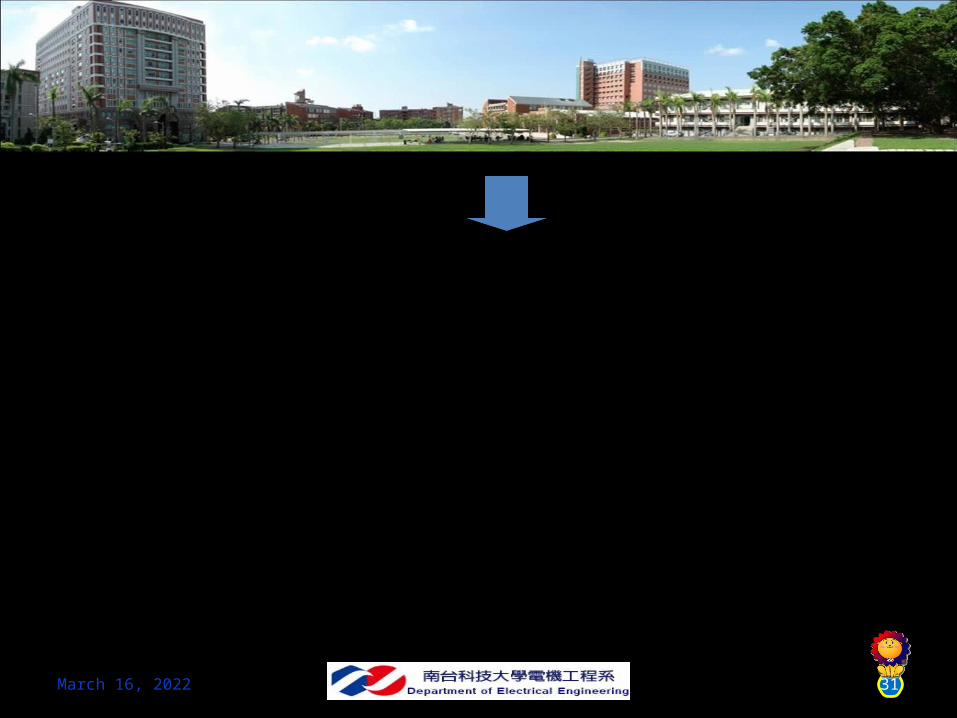
u
u
u
u
u
x
x
a
a
b
b
bpppaa
bp
y
y
y
y
y
x
x
a
a
b
b
aab
b
a
a
b
b
1
2
1
2
2
1
1
2
1
2
112121
22
2
1
2
1
2
2
1
0000001
000000
000000
000000
000000
0
00010
22212
12111
21
DDC
DDC
BBA
G flow
April 21, 2023 32
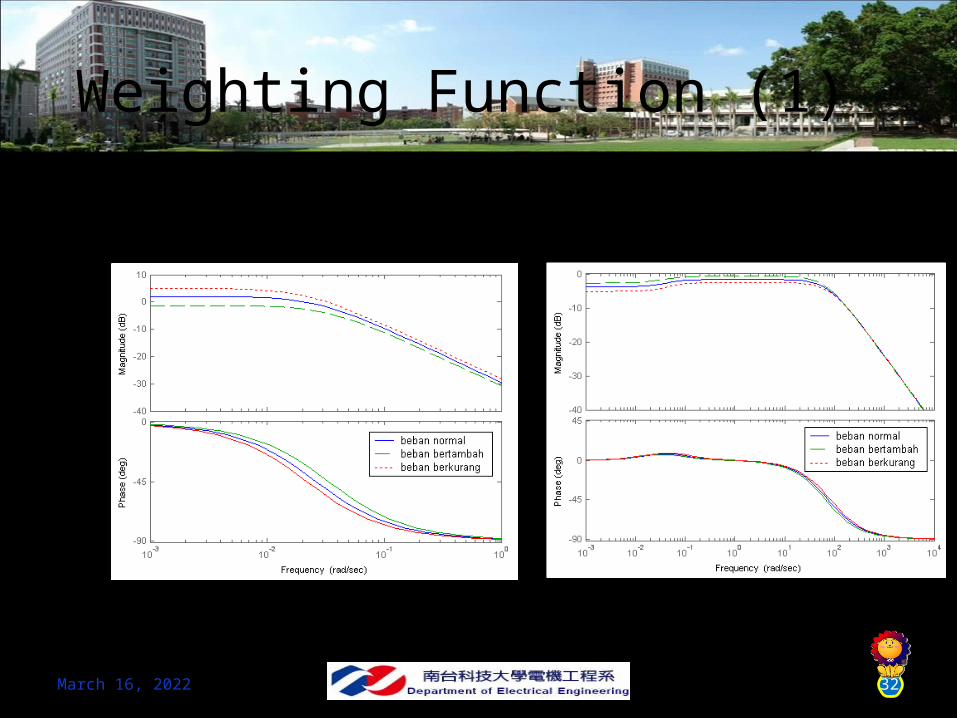
Weighting Function (1) Choosen value refer to open-loop plant Characteristic in
Frequency Domain
April 21, 2023 33
Weighting Function (2)Pressure plant performance WF (wPressure plant performance WF (wpppp))
Flowrate plant performance WF (wFlowrate plant performance WF (wpfpf))
01,04,11
8,1296,0)(
2
2
ss
ssswpp
92
2
10
12231,0)(
ss
ssswpf
“ Note that finding appropriate weighting functions is a crucial step in robust control design and usually needs a few trials. For
complex systems, significant efforts may be required ” (Gu, 2005)
April 21, 2023 34
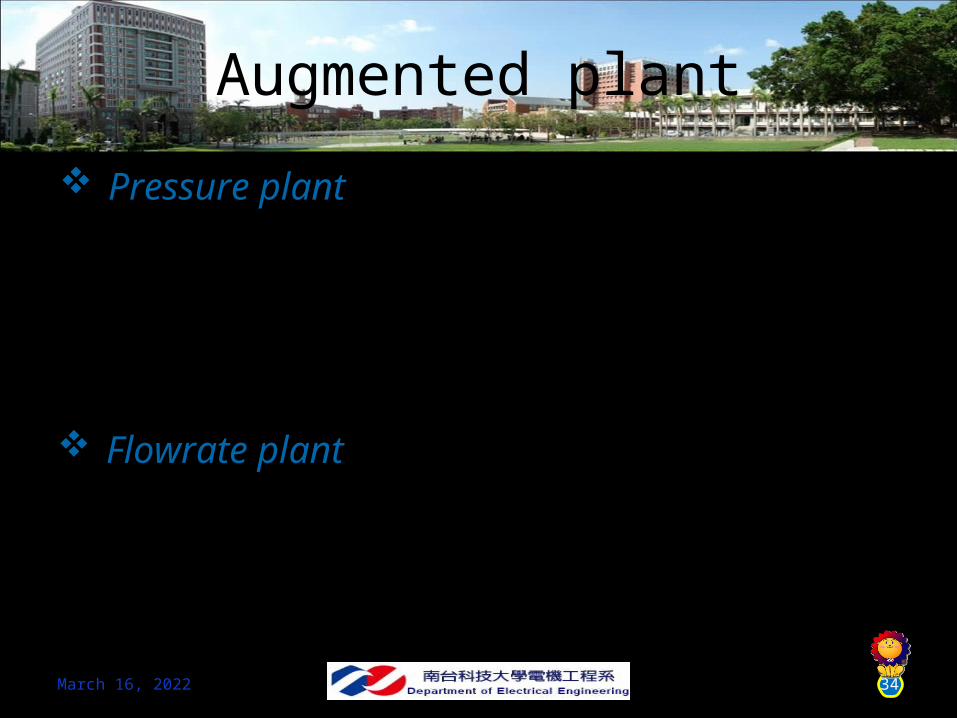
Augmented plant
Gpres
∆
Wpp
-Wup
Gc+- ++
G
r = 0 u
depp
eup
Gflow
∆
Wpf
-Wuf
Gc+- ++
G
r = 0 u
depf
euf
Pressure plantPressure plant
Flowrate plantFlowrate plant

April 21, 2023 35
Controller Parameter
Primary Controller
0,00328 3,75s s73,11s
0,4608 17,51s 0,0006262s 23
2
presGc
Secondary Controller
007-1,785e 90,34s 165,5s 77,16ss
114,6 2590s s1407s 18,3234
23
flowGc
April 21, 2023 36
Result and analysis
37
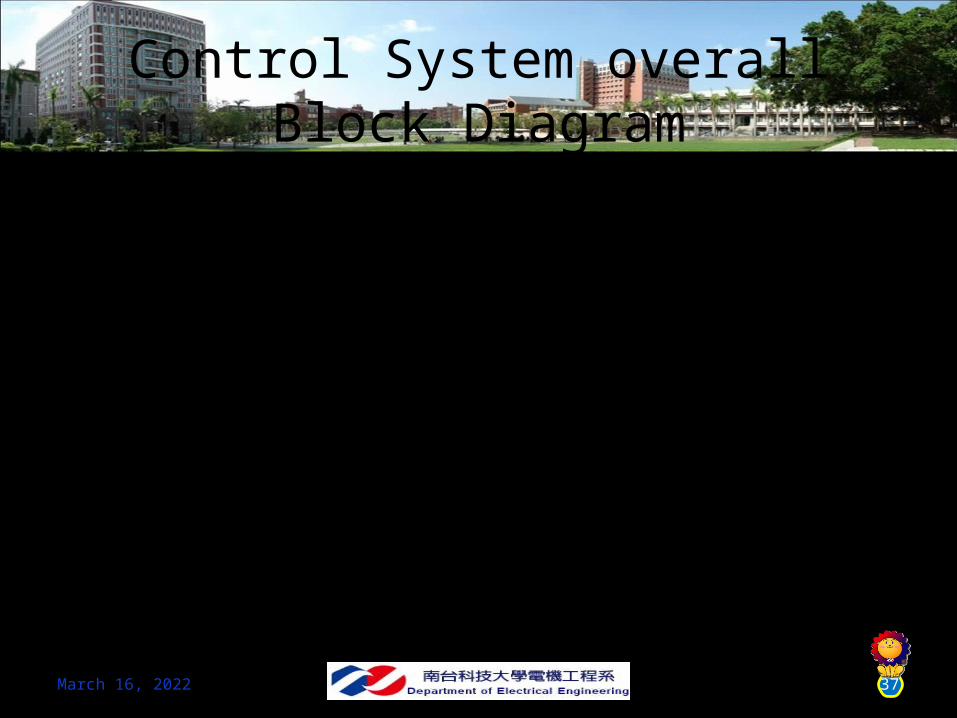
Control System overall Block Diagram
Gcpres(s) Gpres(s)CV1SP e1 e2
Inner loop
Gcflow(s) Gflow(s)PV1
-+ -+ PV2CV2
April 21, 2023
0,00328 3,75s s73,11s
0,4608 17,51s 0,0006262s 23
2
presGc
007-1,785e 90,34s 165,5s 77,16ss
114,6 2590s s1407s 18,3234
23
flowGc
April 21, 2023 38
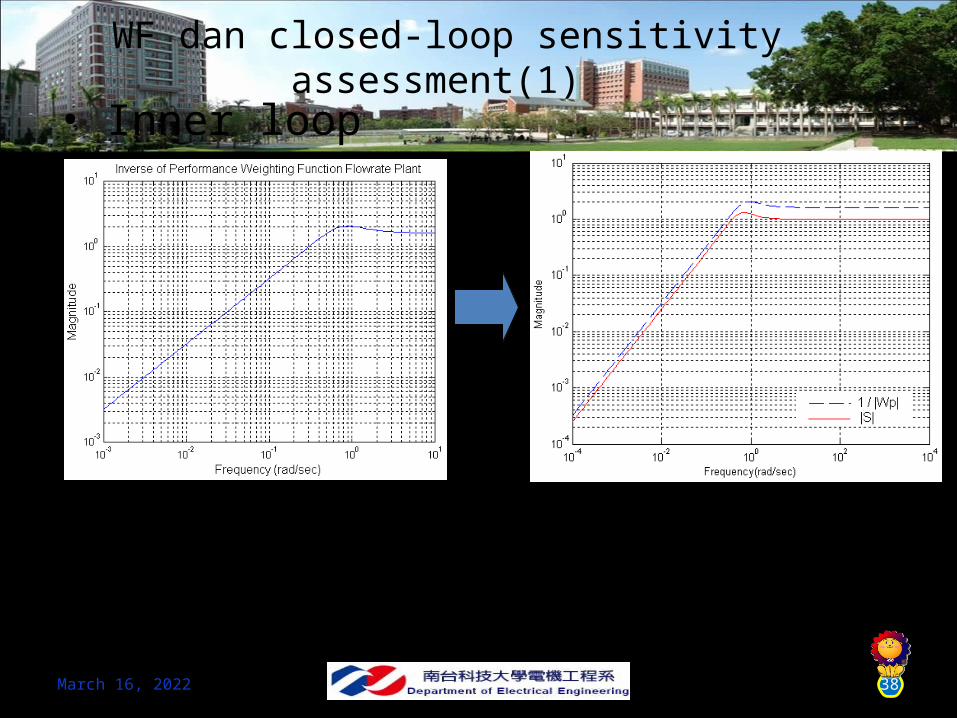
WF dan closed-loop sensitivity assessment(1)
• Inner loop
12 )()( GcGIGS flowflow
,)(
1)(
jwjS
P
1,1
SwSw PP
||wpfS||∞ = 0.7531 < 1
April 21, 2023 39
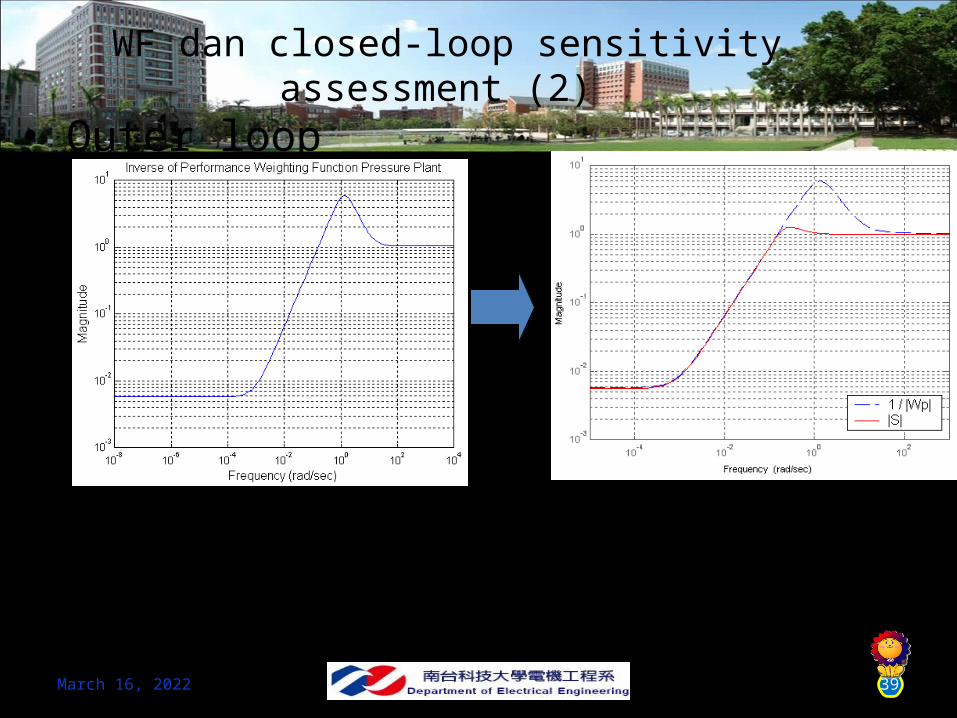
WF dan closed-loop sensitivity assessment (2)
• Outer loop
,)(
1)(
jwjS
P
1,1
SwSw PP
||wppS||∞ = 0.9854 < 1
11)()( GcGIGS prespres
April 21, 2023 40
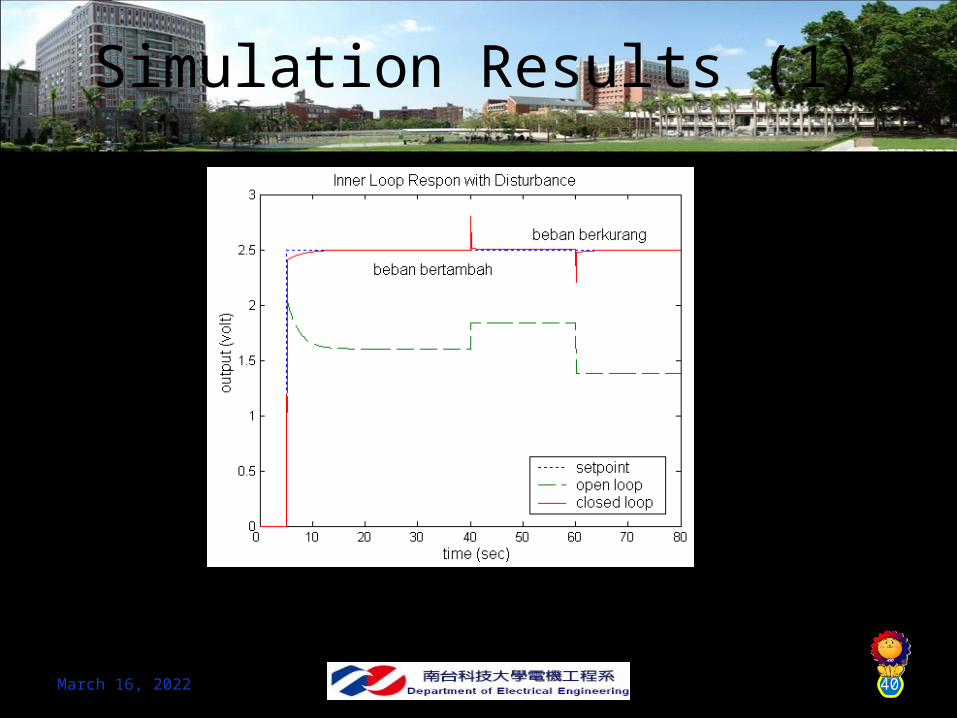
Simulation Results (1)
Inner loop respons with secondary controller
April 21, 2023 41
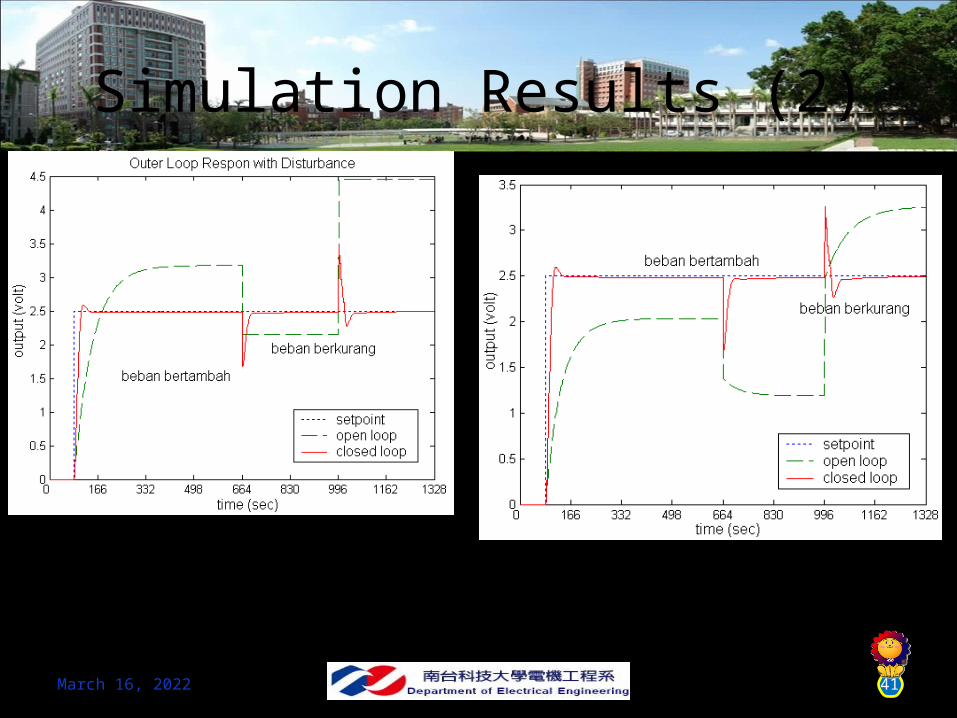
Simulation Results (2)
Outer loop responsewith primary controller
System response withCascade controller
April 21, 2023 42
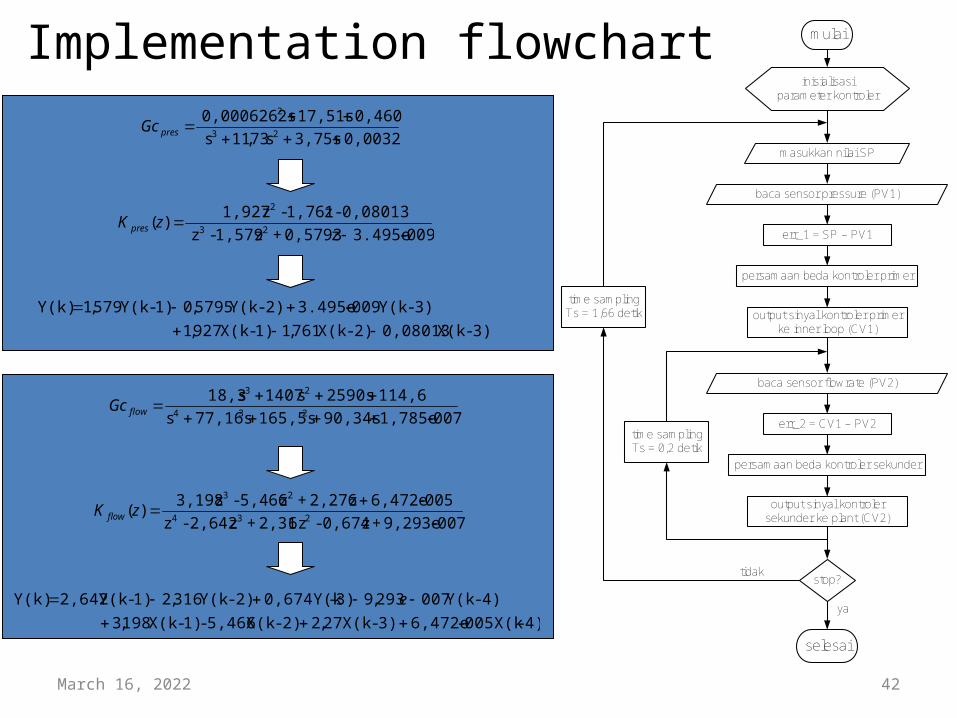
Implementation flowchart
0,00328 3,75s s73,11s
0,4608 17,51s 0,0006262s 23
2
presGc
mulai
err_1 = SP – PV1
output sinyal kontroler primer ke inner loop (CV1)
selesai
persamaan beda kontroler primer
masukkan nilai SP
inisialisasi parameter kontroler
baca sensor pressure (PV1)
err_2 = CV1 – PV2
output sinyal kontroler sekunder ke plant (CV2)
persamaan beda kontroler sekunder
stop?tidak
ya
baca sensor flowrate (PV2)
time samplingTs = 1,66 detik
time samplingTs = 0,2 detik
3)-X(k 0,080132)-X(k 761,11)-X(k 927,1
3)-Y(k 009-3.495e 2)-Y(k 5795,01)-Y(k 579,1Y(k)
009-3.495e z 0,5793 + z 1,579 - z
0,08013 - z 1,761 - z 1,927)(
23
2
zK pres
4)-005X(k-6,472e 3)-X(k 27,22)-X(k 5,466-1)-X(k 198,3
4)-Y(k007293,93)-0,674Y(k2)-Y(k316,21)-Y(k 2,642 Y(k)
e
007-9,293e + z 0,674 - 6z 2,31 + z 2,642 - z
005-6,472e z 2,276 + z 5,466 - z 3,198)(
234
23 zK flow
007-1,785e 90,34s 165,5s 77,16ss
114,6 2590s s1407s 18,3234
23
flowGc
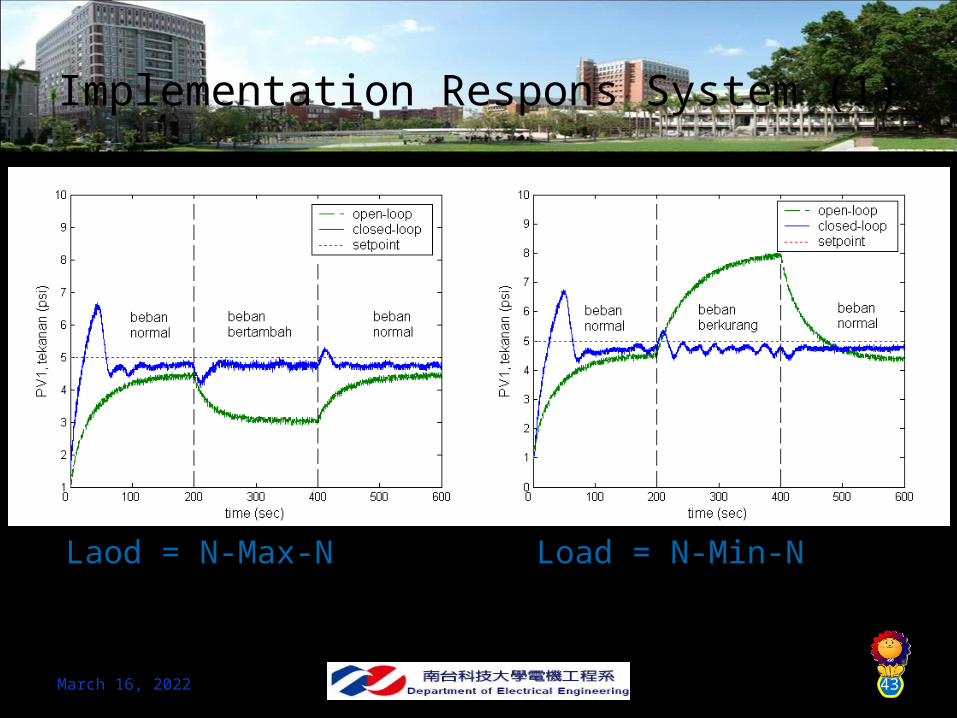
43
Implementation Respons System (1)
April 21, 2023
Laod = N-Max-N Load = N-Min-N
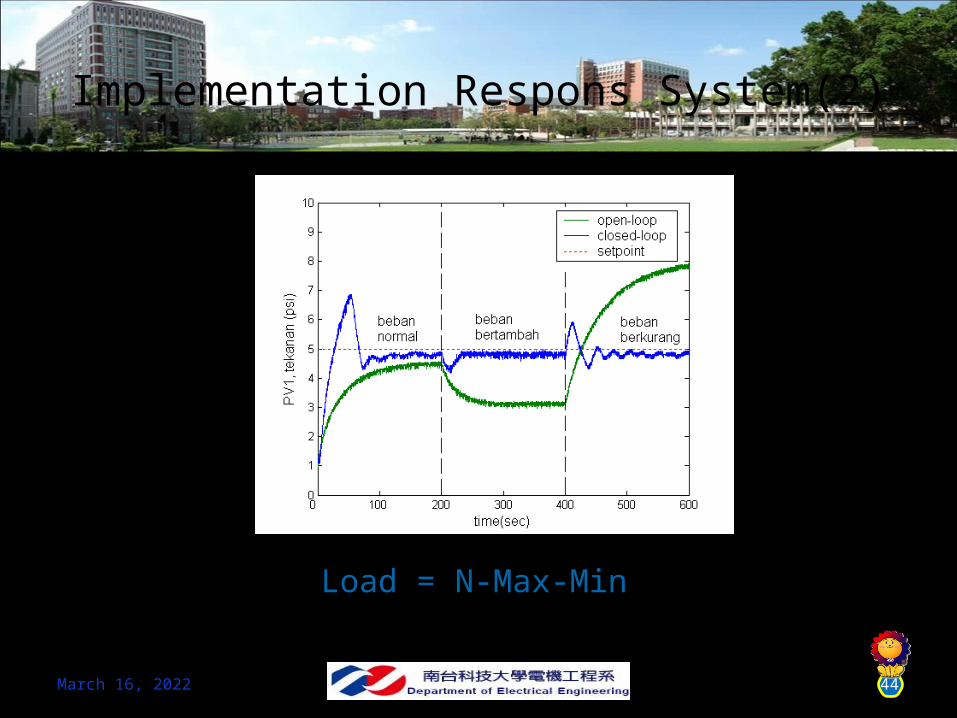
April 21, 2023 44
Implementation Respons System(2)
Load = N-Max-Min
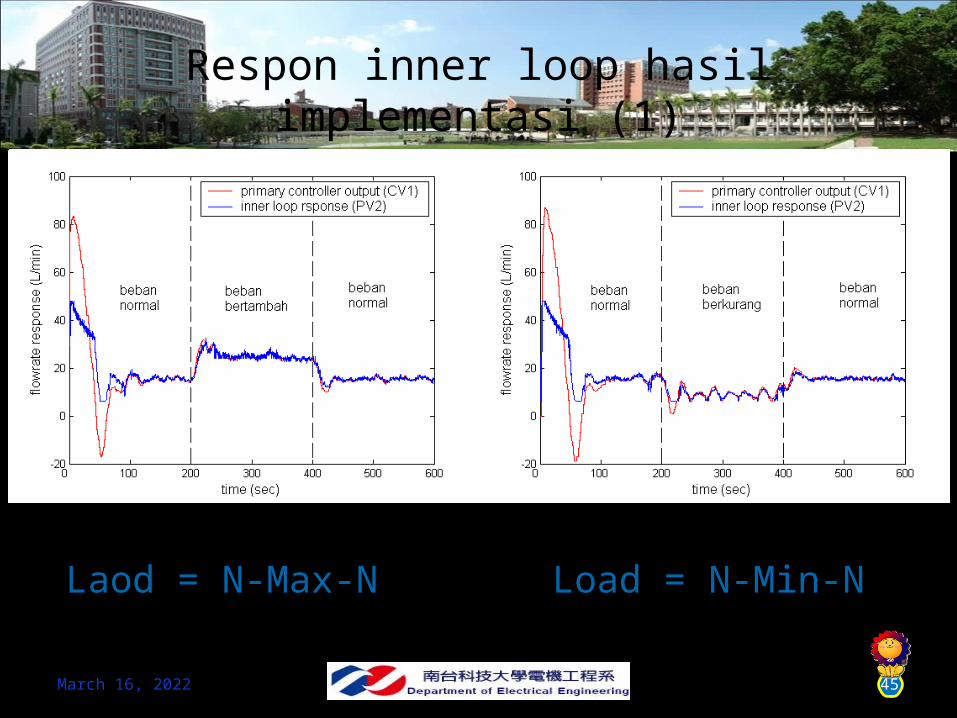
April 21, 2023 45
Respon inner loop hasil implementasi (1)
Laod = N-Max-N Load = N-Min-N
April 21, 2023 46
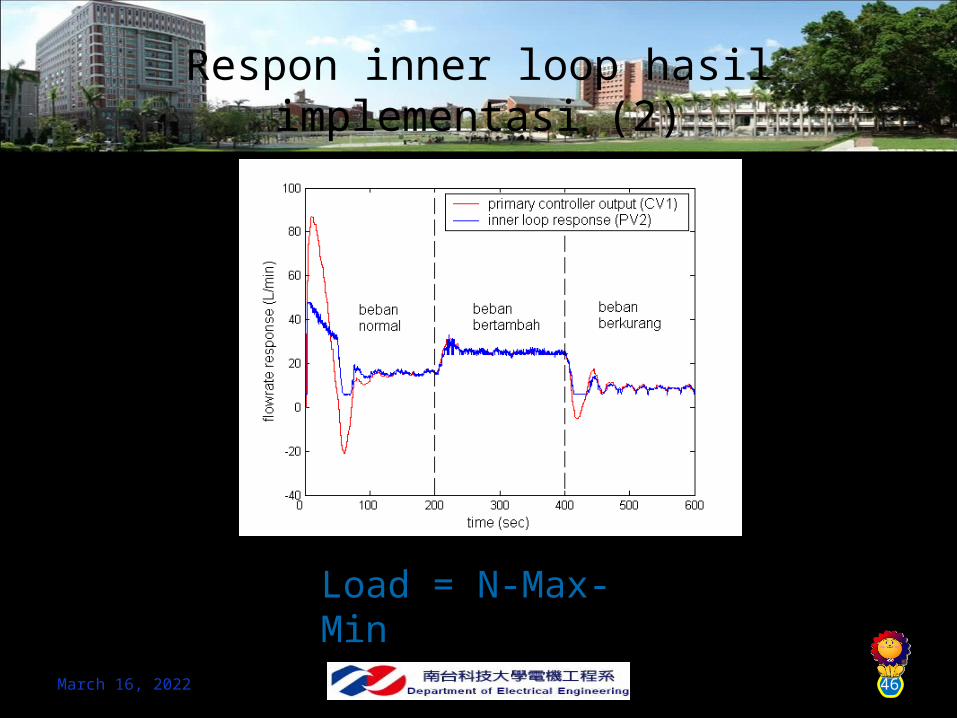
Respon inner loop hasil implementasi (2)
Load = N-Max-Min
April 21, 2023 47
Conclusion
The results of closed-loop design with cascade control in this research, are qualified robust stability and robust performance based on the small gain theorem, so that the stability and performance of the system can be maintained in the event of changes in plant parameters
Classical methods approach can be used to design a robust cascade controller. Thus, resolving can use SISO (single input single output) system calculation.
Implementation result shows good achievement. Thus, performance robustness and stability robustness can be maintained in the event of changes in plant parameters
April 21, 2023 48
April 21, 202349
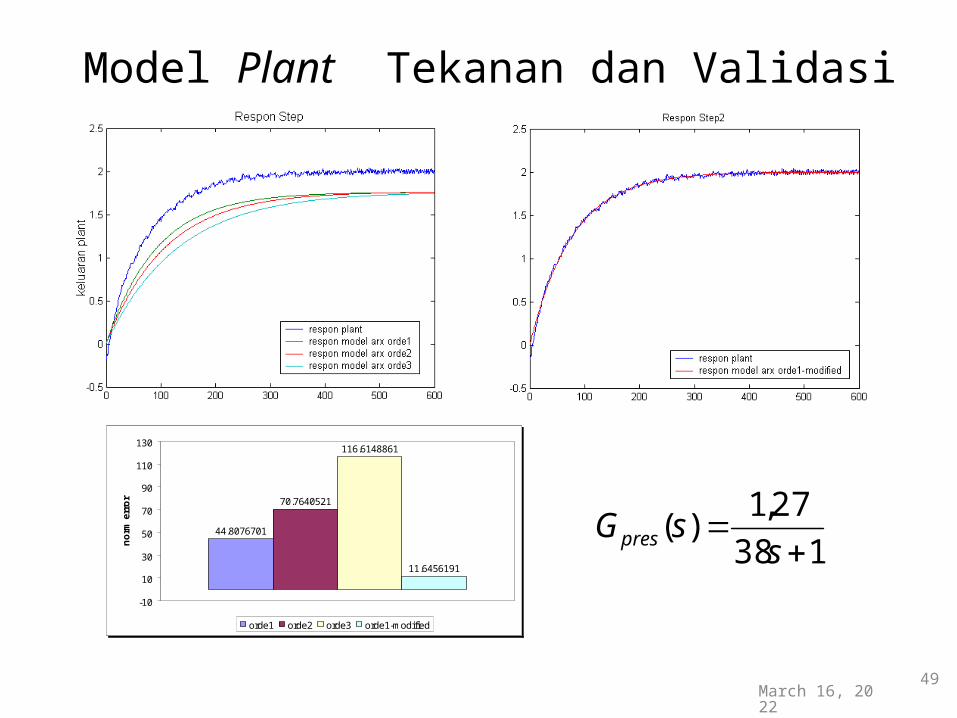
44.8076701
70.7640521
116.6148861
11.6456191
-10
10
30
50
70
90
110
130
no
rm e
rro
r
orde1 orde2 orde3 orde1-modified
138
27,1)(
ssGpres
Model Plant Tekanan dan Validasi
April 21, 202350
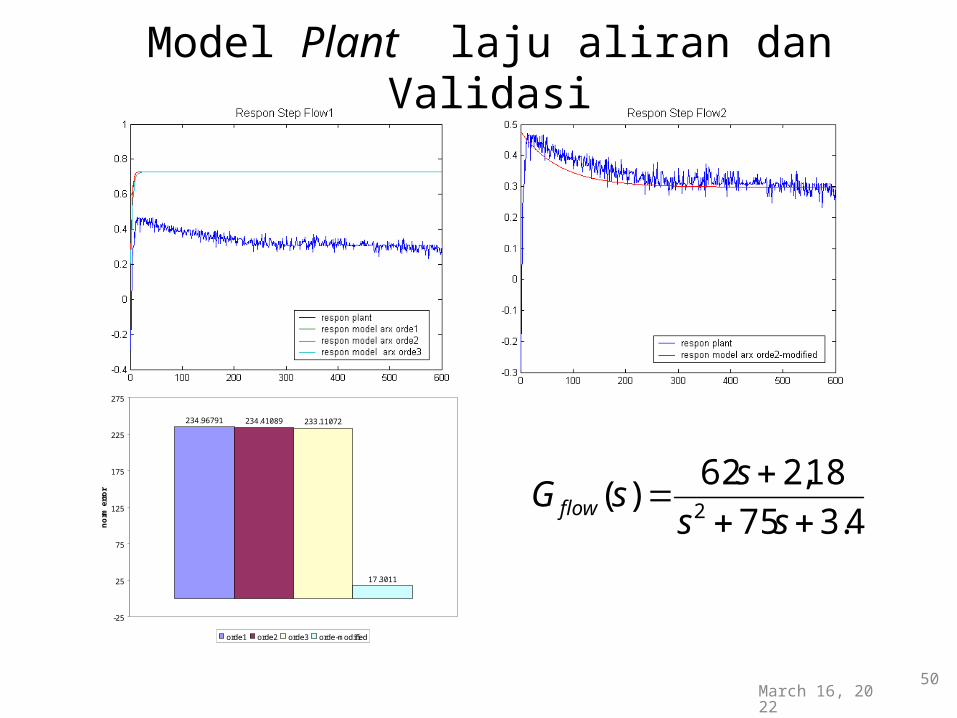
234.96791 234.41089 233.11072
17.3011
-25
25
75
125
175
225
275
no
rm e
rro
r
orde1 orde2 orde3 orde-modified
4.375
18,262)(
2
ss
ssG flow
Model Plant laju aliran dan Validasi
April 21, 202351
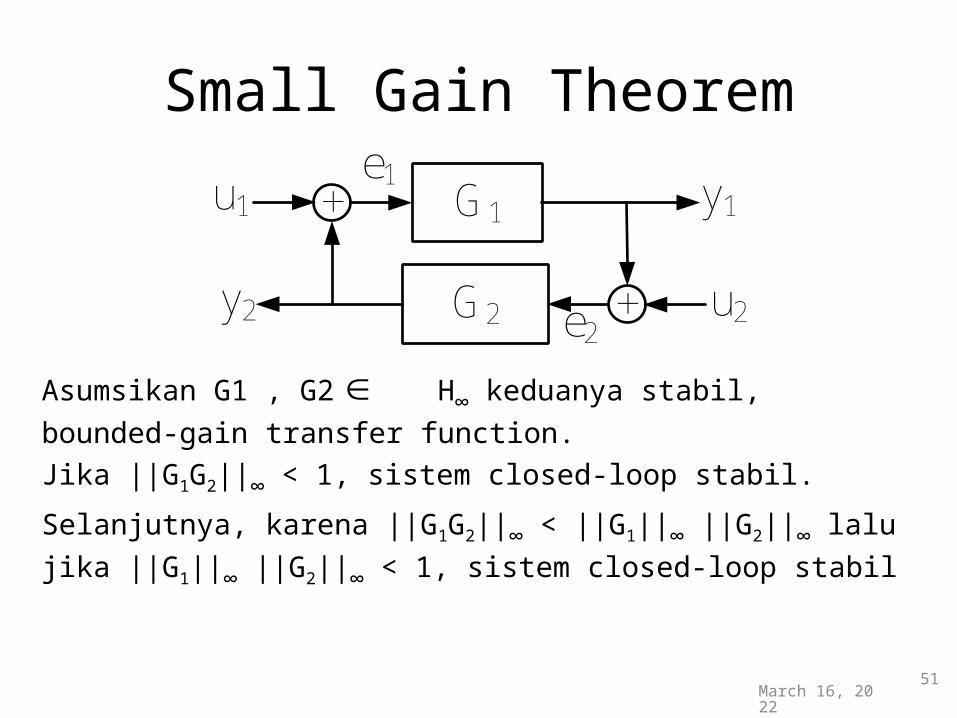
Small Gain Theorem
Asumsikan G1 , G2 H∞ keduanya stabil, bounded-gain transfer function.Jika ||G1G2||∞ < 1, sistem closed-loop stabil.
Selanjutnya, karena ||G1G2||∞ < ||G1||∞ ||G2||∞ lalu jika ||G1||∞ ||G2||∞ < 1, sistem closed-loop stabil
G1
G2
e1+
+e2u2
y1
y2
u1
April 21, 2023 52
Vektor Norm Matrix Norm
n
iixx
11
n
iixx
1
2
2
ii
xx max
m
iij
jaA
11
max
n
jij
iaA
1
max
AA 2
53
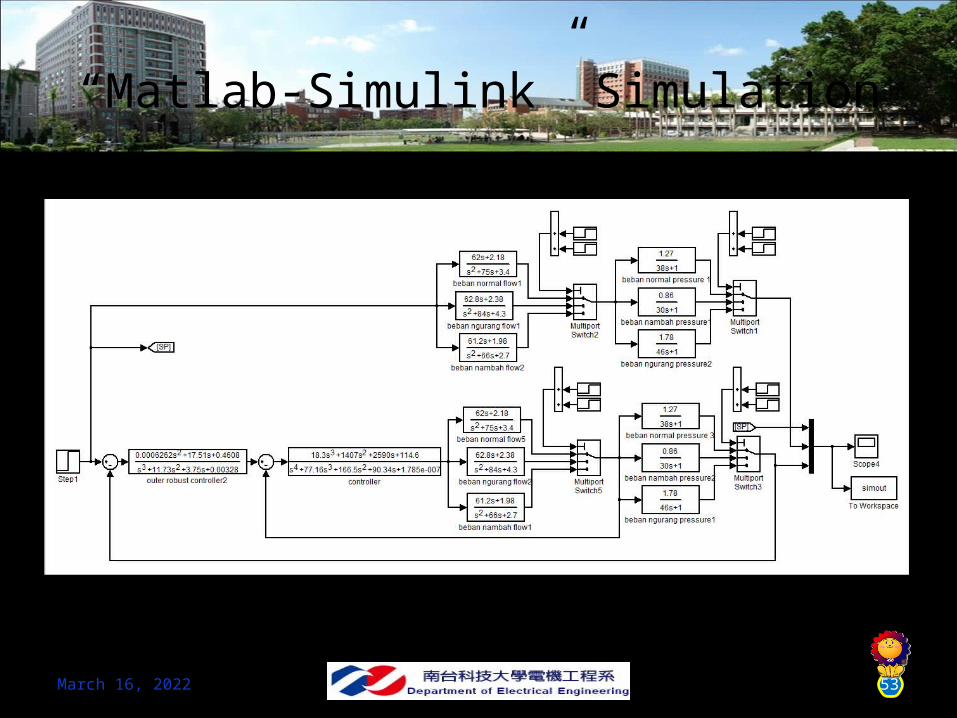
“Matlab-Simulink” Simulation
April 21, 2023
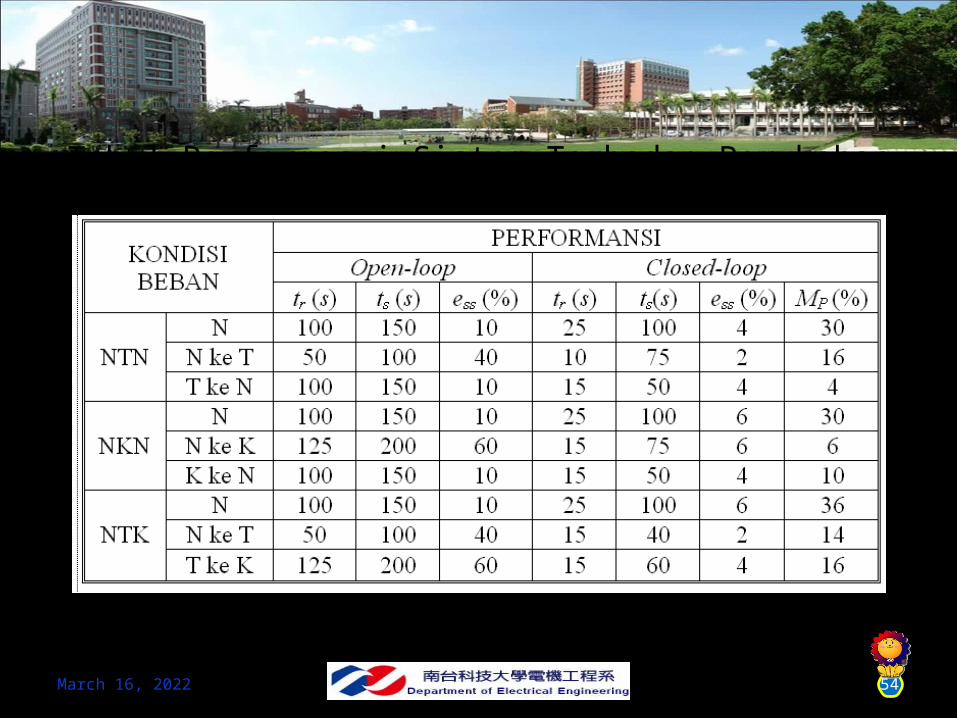
April 21, 2023 54
Tabel Performansi Sistem Terhadap Perubahan Beban
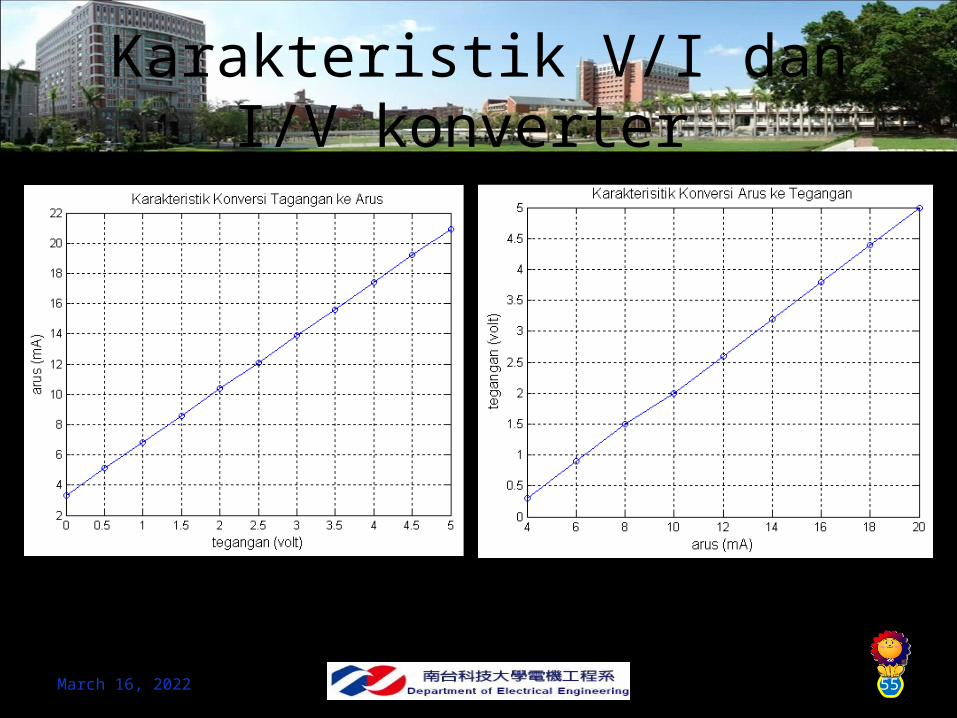
April 21, 2023 55
Karakteristik V/I dan I/V konverter
56April 21, 2023

57April 21, 2023

58April 21, 2023