Embed Size (px)
Citation preview
Ryan O’Donnell (CMU, IAS)
joint work with
Ankur Moitra (MIT)
Binary optimization, linear objective
F ⊆ {0,1}n, “feasible solutions”
max
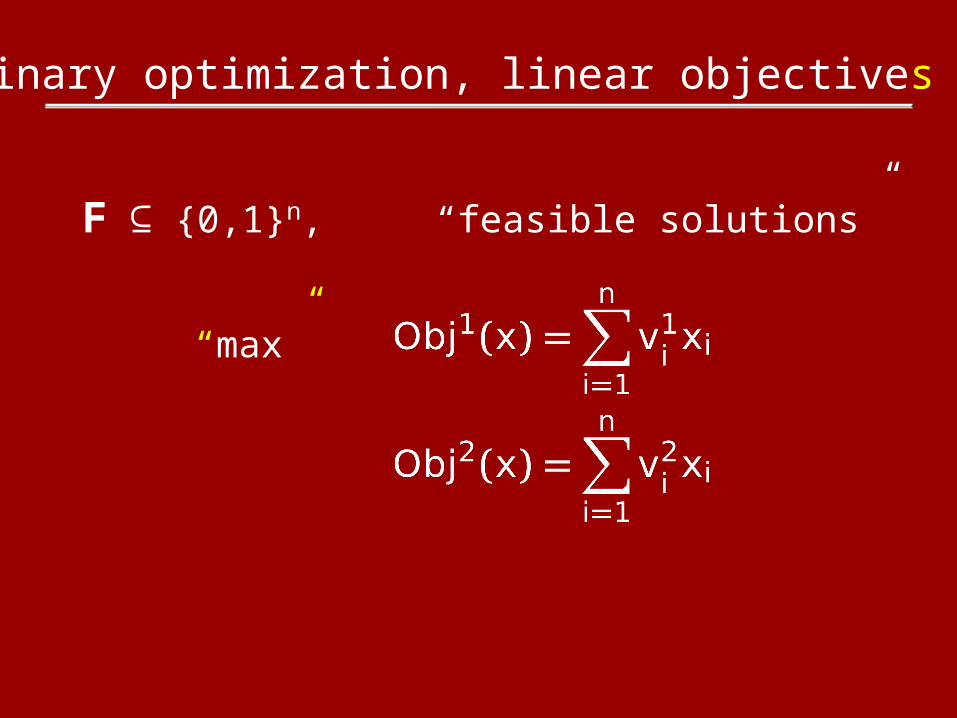
Binary optimization, linear objectives
F ⊆ {0,1}n, “feasible solutions”
“max”
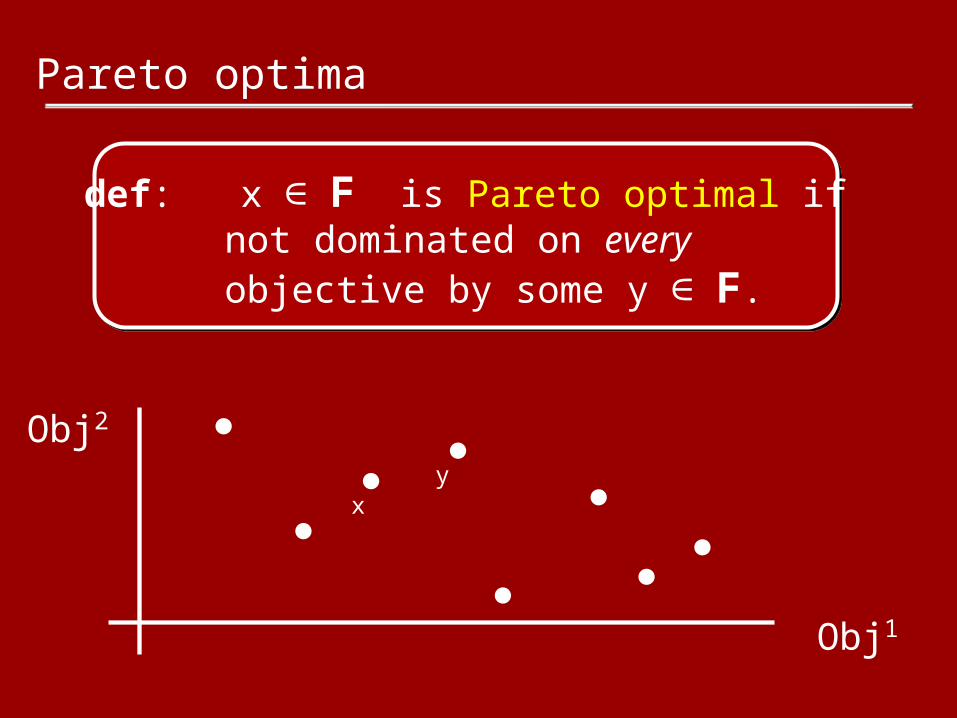
Pareto optima
def: x ∈ F is Pareto optimal if not dominated on every objective by some y ∈ F.
Obj1
Obj2
xy
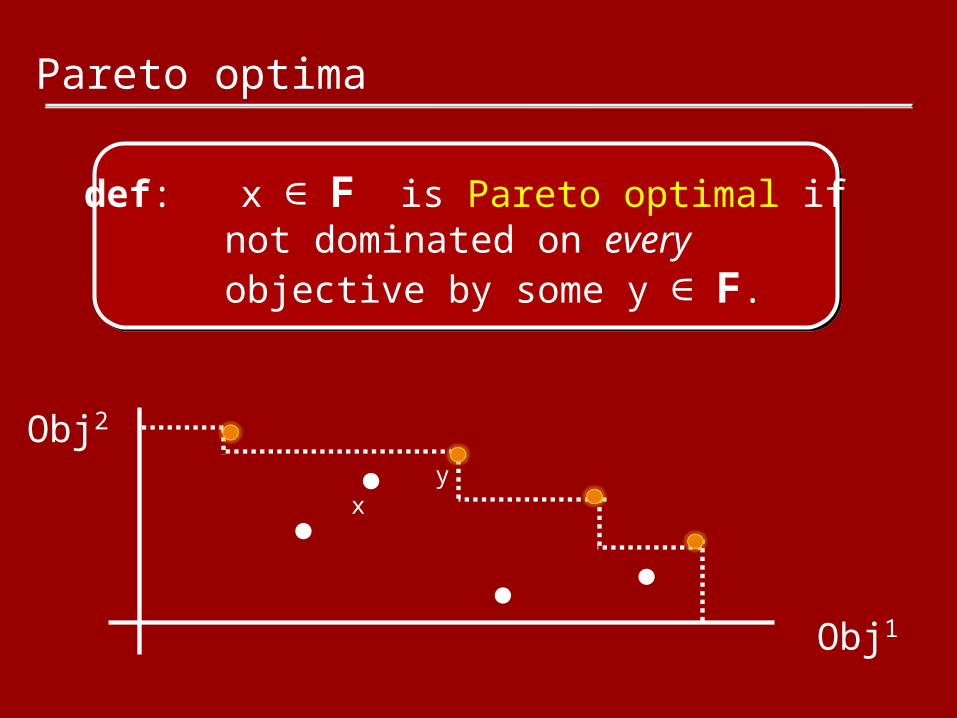
Pareto optima
Obj1
Obj2
xy
def: x ∈ F is Pareto optimal if not dominated on every objective by some y ∈ F.
Obj1
Obj2
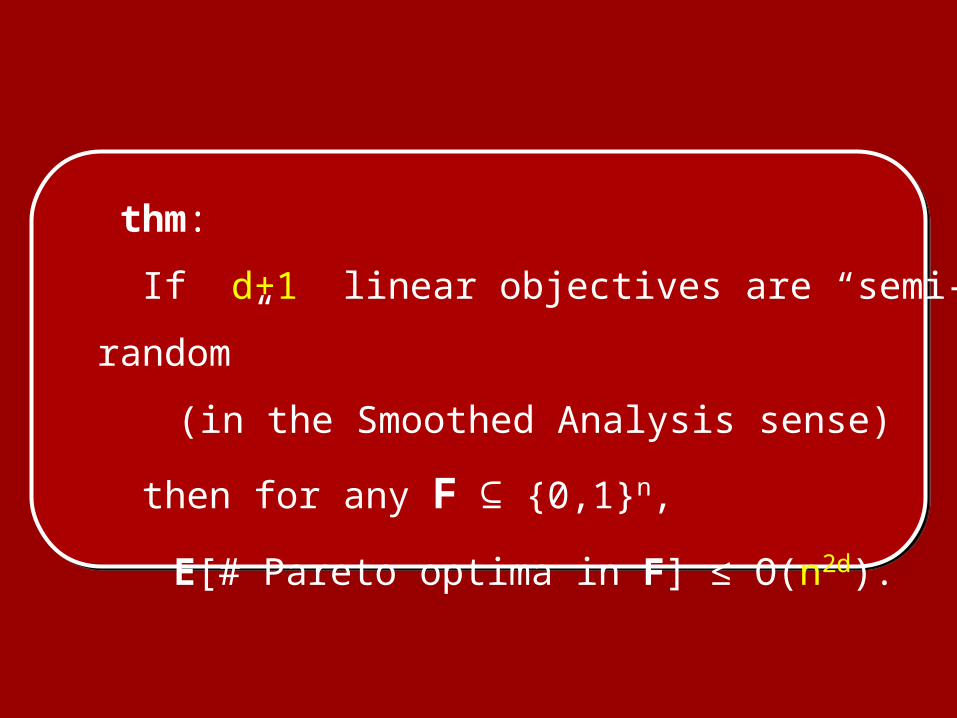
thm:
If d+1 linear objectives are “semi-random”
(in the Smoothed Analysis sense)
then for any F ⊆ {0,1}n,
E[# Pareto optima in F] ≤ O(n2d).
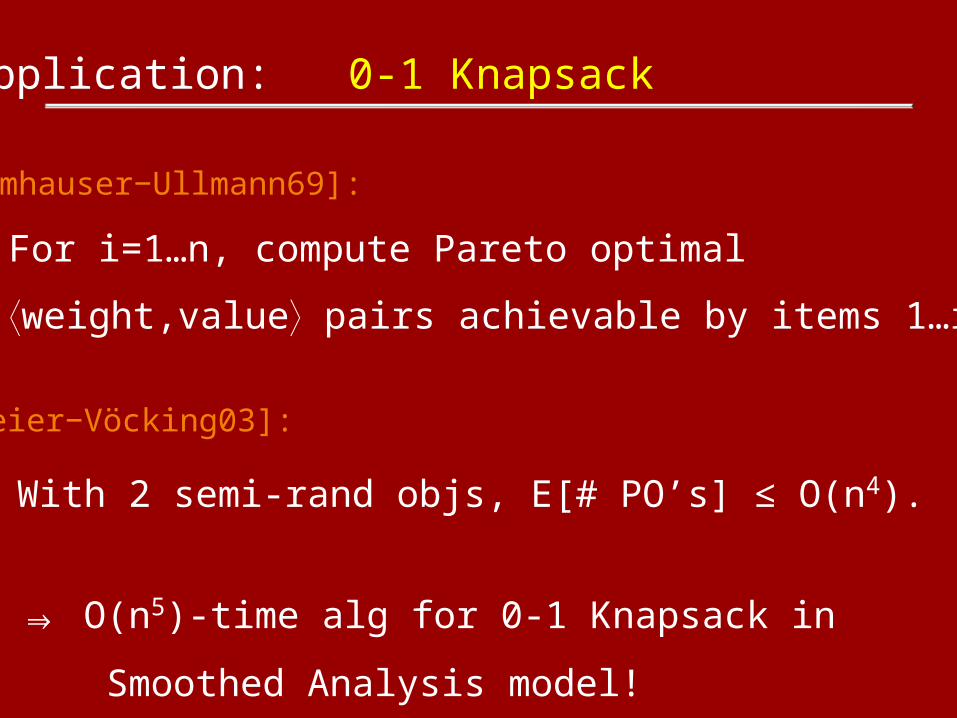
Application: 0-1 Knapsack
[Nemhauser−Ullmann69]:
For i=1…n, compute Pareto optimal
weight,value pairs achievable by items 1…i.⟨ ⟩
[Beier−Vöcking03]:
With 2 semi-rand objs, E[# PO’s] ≤ O(n4).
⇒ O(n5)-time alg for 0-1 Knapsack in
Smoothed Analysis model!
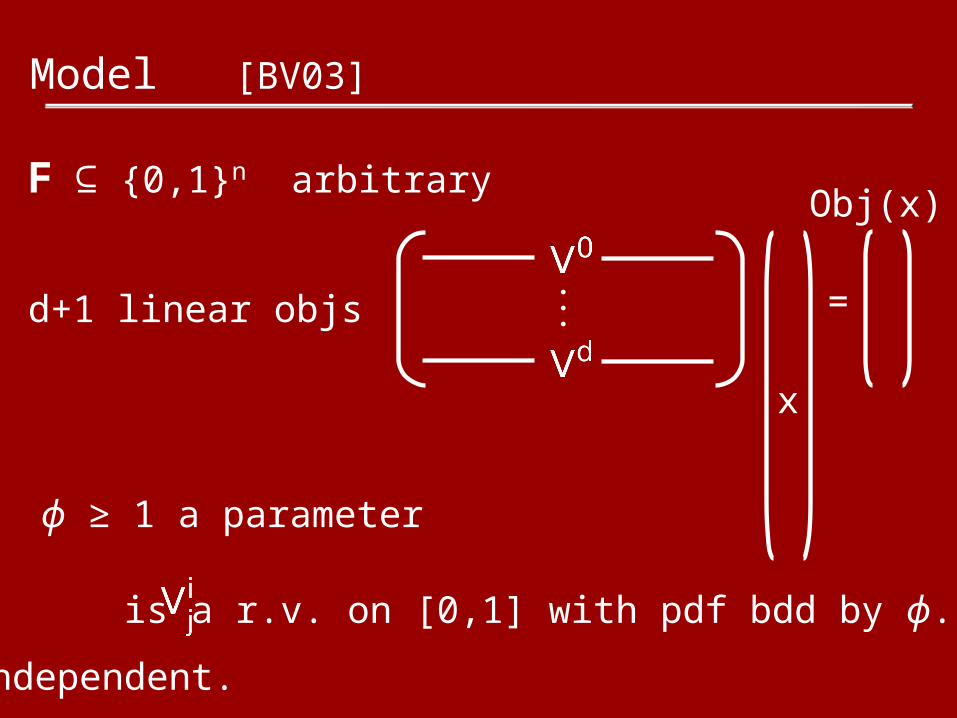
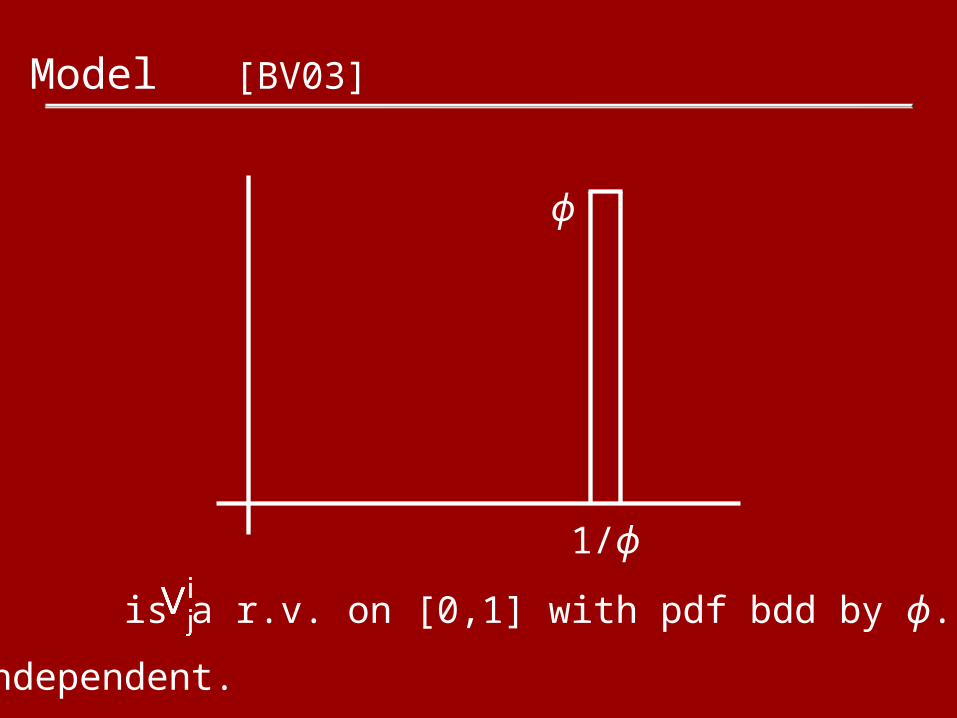
Model [BV03]
F ⊆ {0,1}n arbitrary
d+1 linear objs
x
=
Obj(x)
ϕ ≥ 1 a parameter
Each is a r.v. on [0,1] with pdf bdd by ϕ.
All independent.
Model [BV03]
Each is a r.v. on [0,1] with pdf bdd by ϕ.
All independent.
1/ϕ
ϕ
Prior work
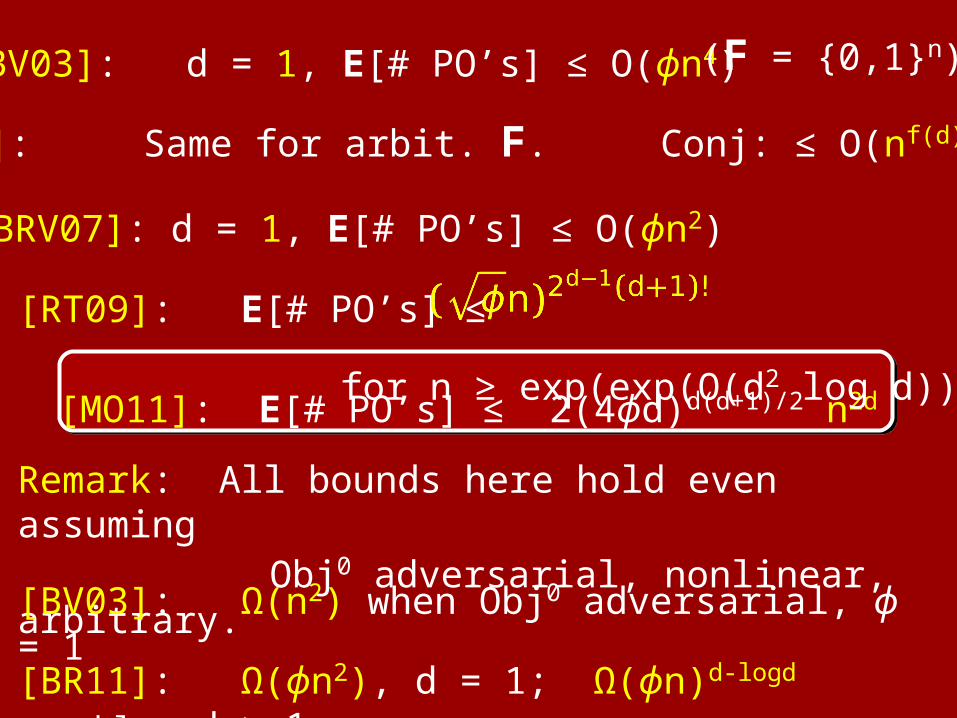
[BV03]: d = 1, E[# PO’s] ≤ O(ϕn4)
[B04]: Same for arbit. F. Conj: ≤ O(nf(d))
[BRV07]: d = 1, E[# PO’s] ≤ O(ϕn2)
[RT09]: E[# PO’s] ≤ roughly
[MO11]: E[# PO’s] ≤ 2(4ϕd)d(d+1)/2 n2d
Remark: All bounds here hold even assuming Obj0 adversarial, nonlinear, arbitrary.
for n ≥ exp(exp(O(d2 log d))
(F = {0,1}n)
[BV03]: Ω(n2) when Obj0 adversarial, ϕ = 1
[BR11]: Ω(ϕn2), d = 1; Ω(ϕn)d-logd roughly, d > 1
Warmup:
Alternate proof (sketch) for
[BRV07]’s d = 1 bound
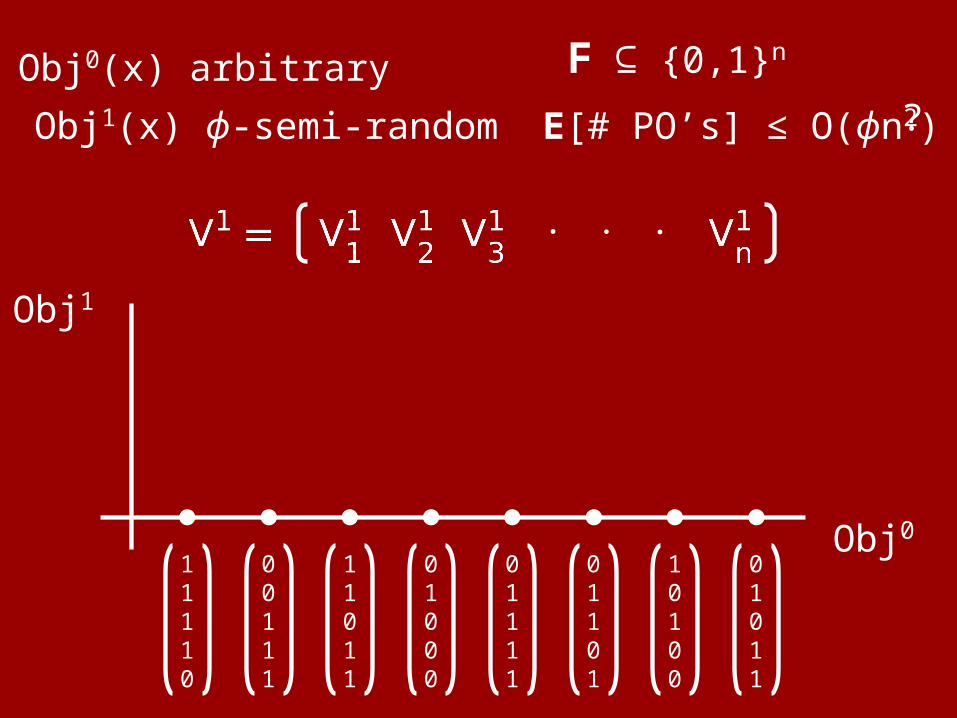
F ⊆ {0,1}nObj0(x) arbitrary
Obj1(x) ϕ-semi-random E[# PO’s] ≤ O(ϕn2) ?
Obj0 01011
10100
01101
01111
01000
11011
00111
11110
Obj1
.8.4
Obj0 01011
10100
01101
01111
01000
11011
00111
11110
.2 .9
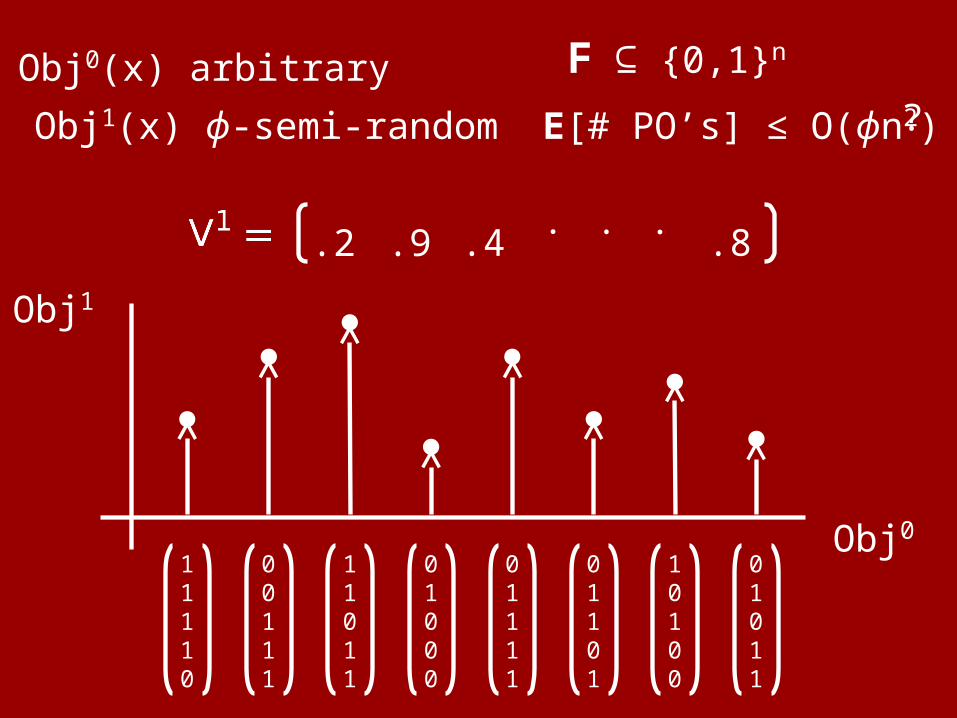
Obj0(x) arbitrary
Obj1(x) ϕ-semi-random
Obj1
F ⊆ {0,1}n
E[# PO’s] ≤ O(ϕn2) ?
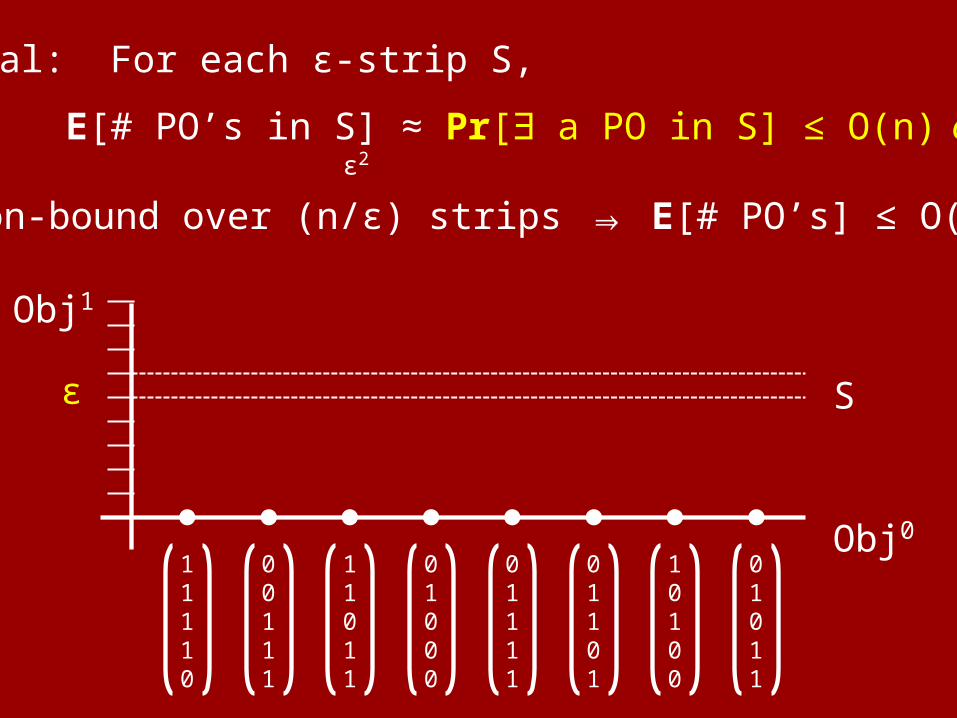
Goal: For each ϵ-strip S,
E[# PO’s in S] ≈ Pr[∃ a PO in S] ≤ O(n) ϕ ϵ
Obj0 01011
10100
01101
01111
01000
11011
00111
11110
ϵ
ϵ2
Obj1
Union-bound over (n/ϵ) strips ⇒ E[# PO’s] ≤ O(ϕn2)
S
Obj0 01011
10100
01111
01000
11011
00111
11110
ϵ
Obj1
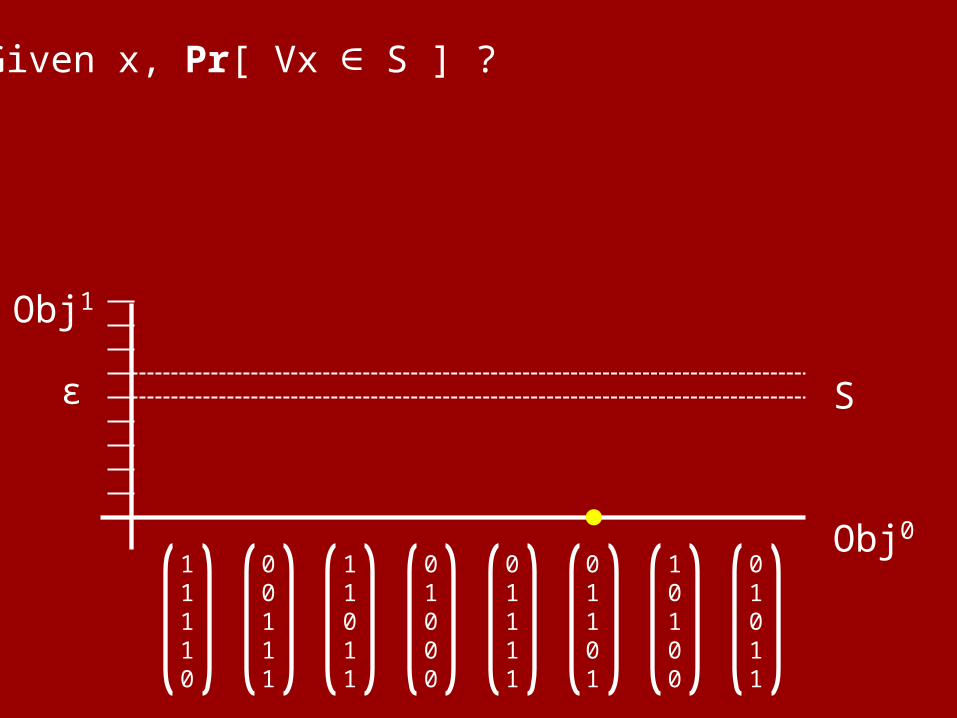
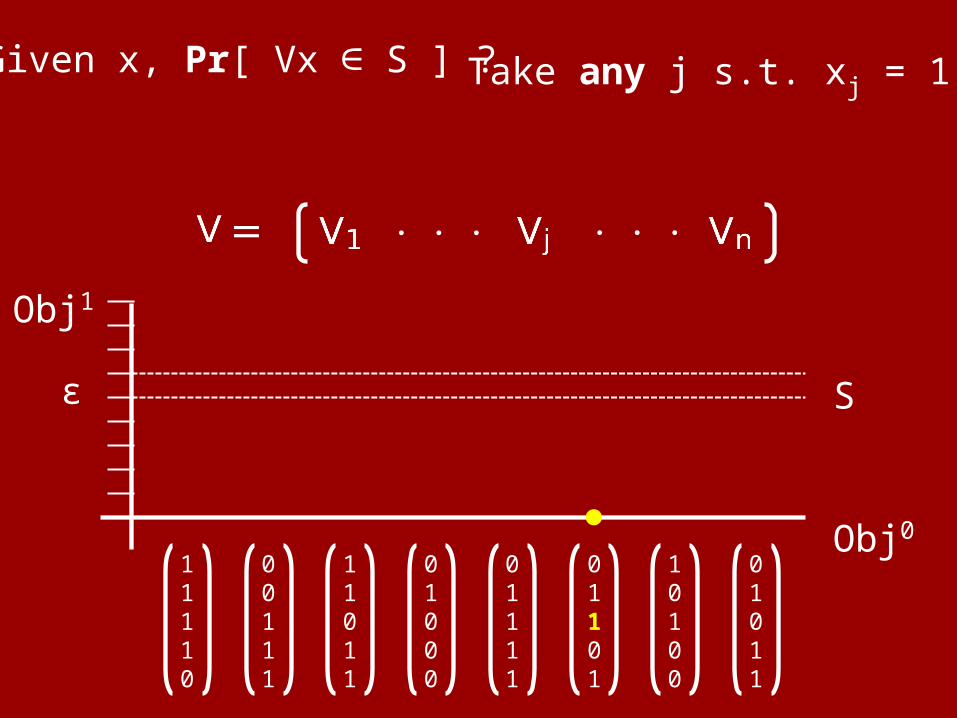
Given x, Pr[ Vx ∈ S ] ?
S
01101
Obj0 01011
10100
01111
01000
11011
00111
11110
ϵ
Obj1
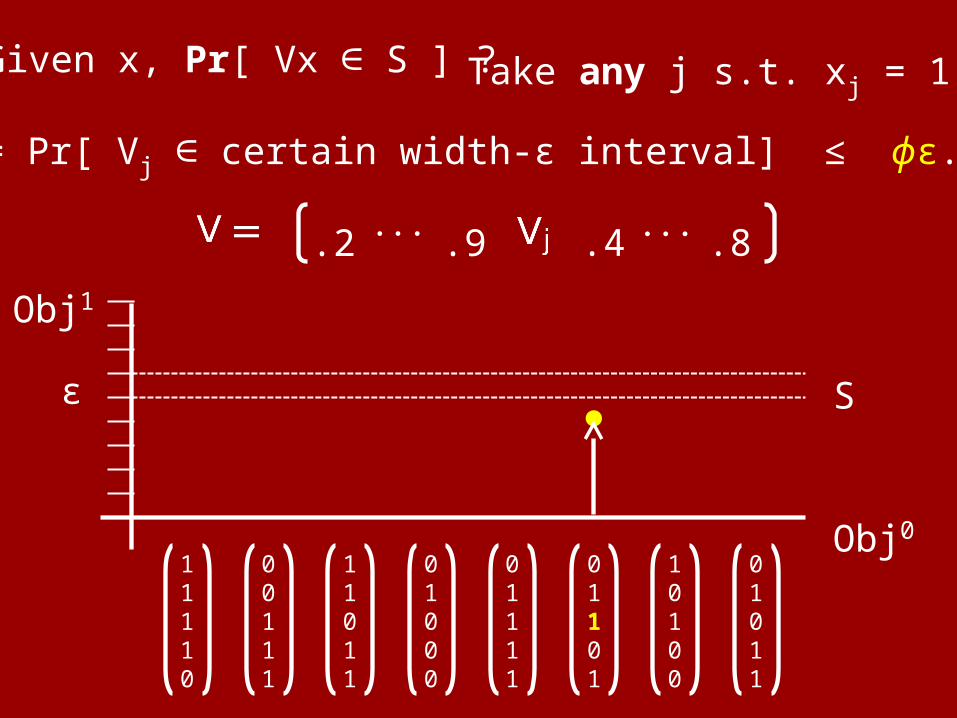
Given x, Pr[ Vx ∈ S ] ?
S
Take any j s.t. xj = 1.
01101
Obj0 01011
10100
01101
01111
01000
11011
00111
11110
ϵ
Obj1
Given x, Pr[ Vx ∈ S ] ?
S
Take any j s.t. xj = 1.
.8.4.2 .9
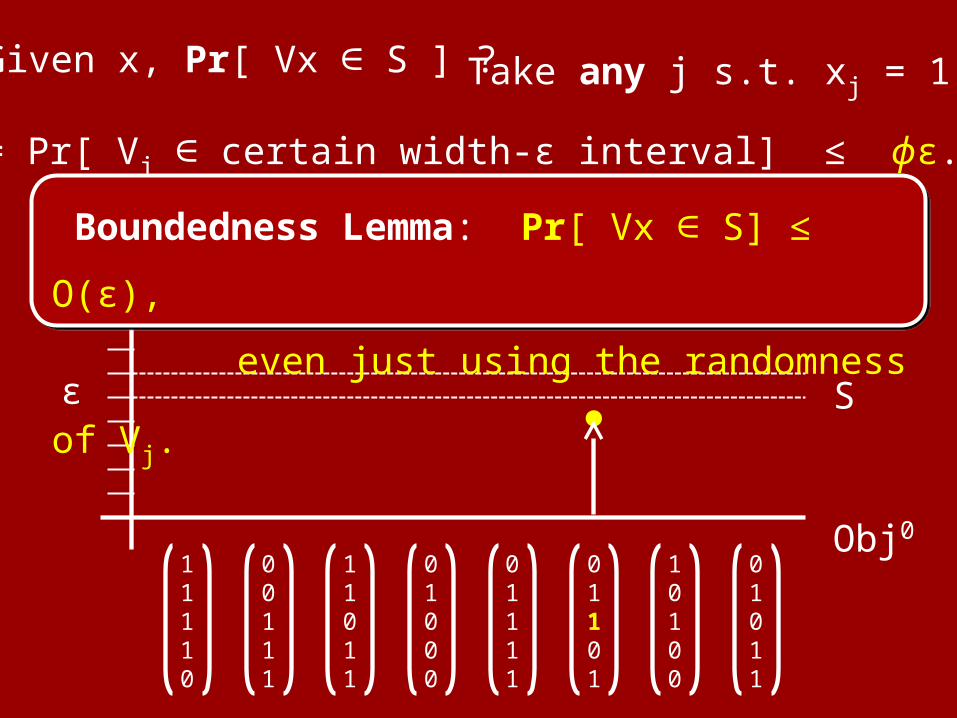
= Pr[ Vj ∈ certain width-ϵ interval] ≤ ϕϵ.
Obj0 01011
10100
01101
01111
01000
11011
00111
11110
ϵ
Given x, Pr[ Vx ∈ S ] ?
S
Take any j s.t. xj = 1.
= Pr[ Vj ∈ certain width-ϵ interval] ≤ ϕϵ.
Boundedness Lemma: Pr[ Vx ∈ S] ≤ O(ϵ),
even just using the randomness of Vj.
Obj0 01011
10100
01101
01111
01000
11011
00111
11110
ϵ
Obj1
S
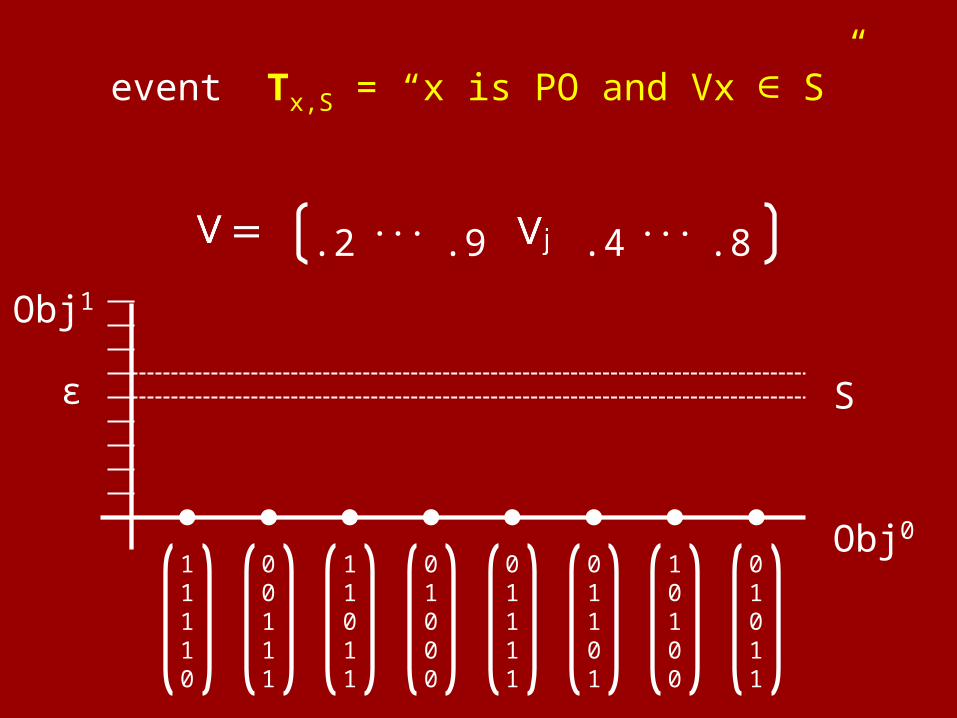
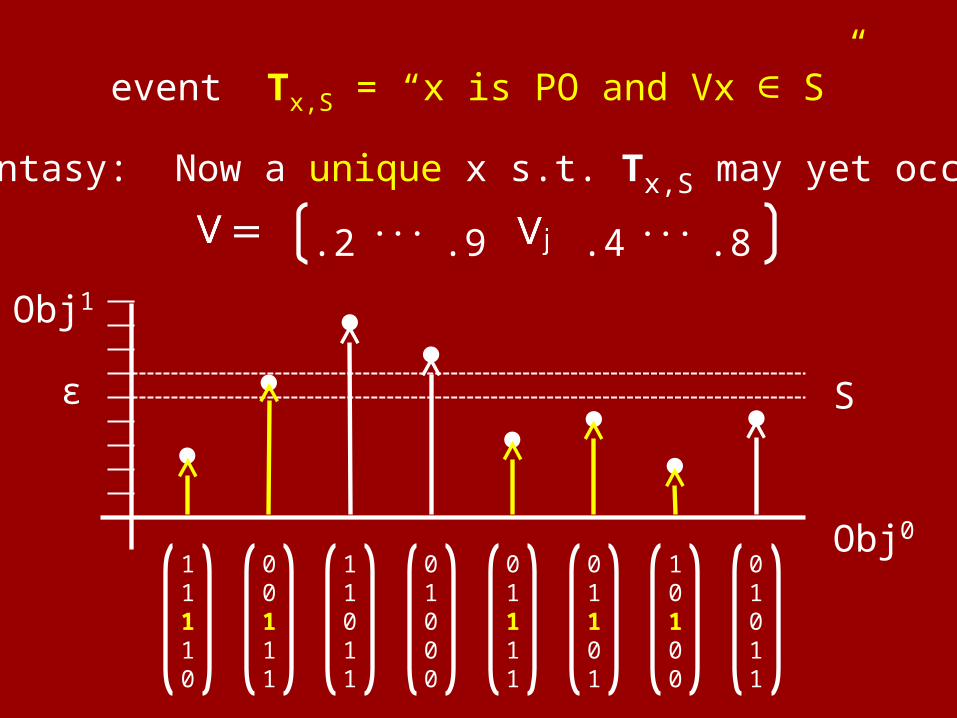
event Tx,S = “x is PO and Vx ∈ S”
.8.4.2 .9
Obj0 01011
10100
01101
01111
01000
11011
00111
11110
ϵ
Obj1
S
event Tx,S = “x is PO and Vx ∈ S”
.8.4.2 .9
Fantasy: Now a unique x s.t. Tx,S may yet occur
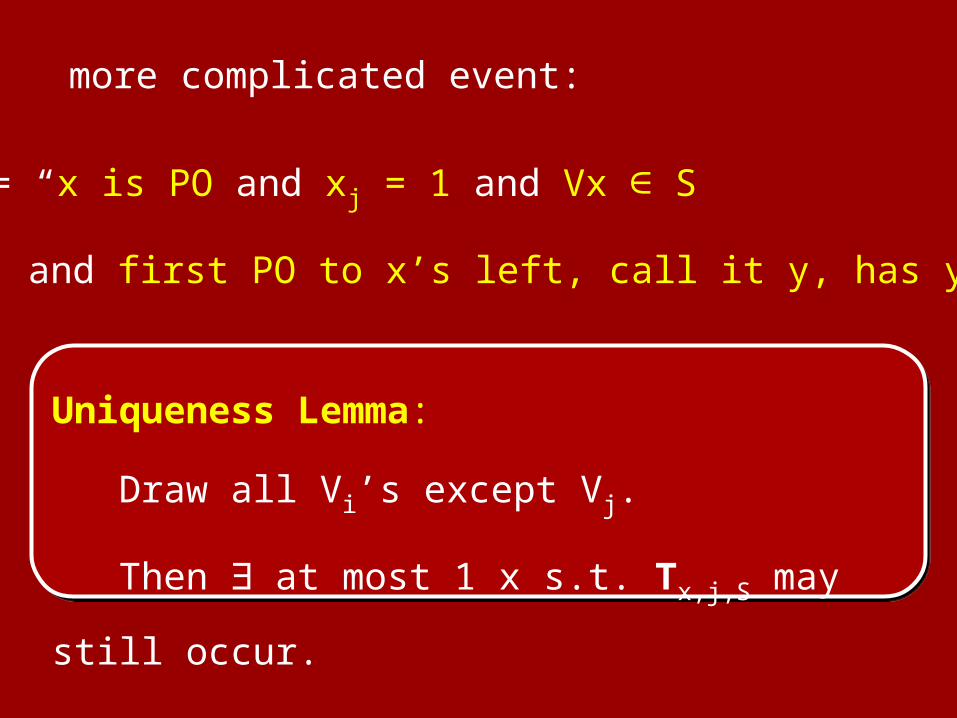
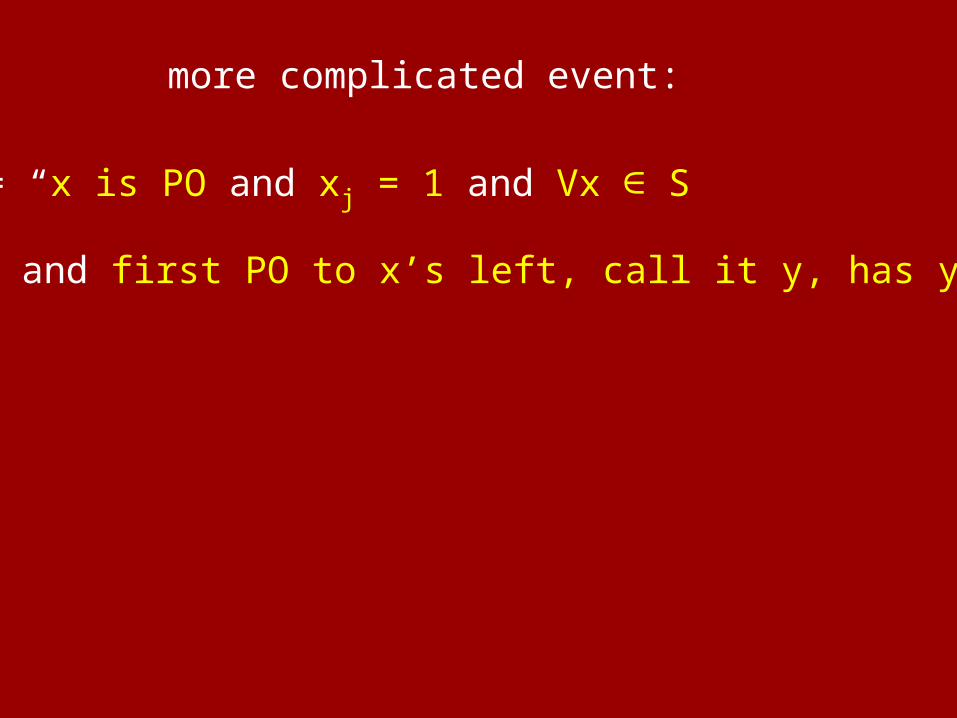
more complicated event:
Tx,j,S = “x is PO and xj = 1 and Vx ∈ S
and first PO to x’s left, call it y, has yj = 0”
Uniqueness Lemma:
Draw all Vi’s except Vj.
Then ∃ at most 1 x s.t. Tx,j,S may still occur.
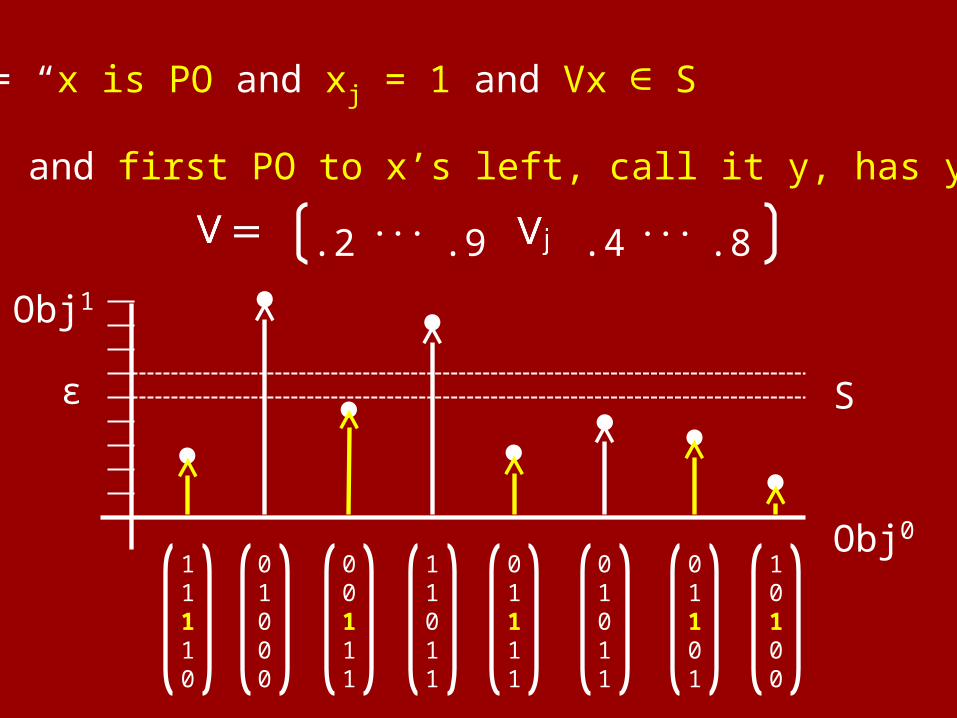
Tx,j,S = “x is PO and xj = 1 and Vx ∈ S
and first PO to x’s left, call it y, has yj = 0”
Obj0 01011
10100
01101
01111
01000
11011
00111
11110
ϵ
Obj1
S
.8.4.2 .9
Remainder of the d=1 proof sketch
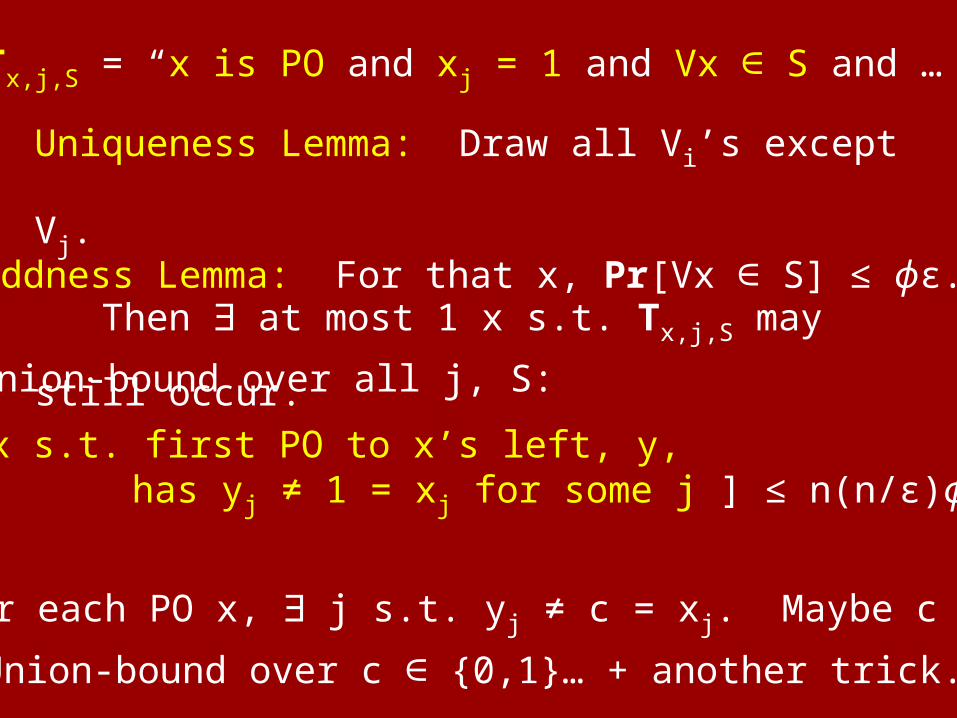
Tx,j,S = “x is PO and xj = 1 and Vx ∈ S and …”
Uniqueness Lemma: Draw all Vi’s except Vj.
Then ∃ at most 1 x s.t. Tx,j,S may still occur.Bddness Lemma: For that x, Pr[Vx ∈ S] ≤ ϕϵ.
Union-bound over all j, S:
E[ # PO x s.t. first PO to x’s left, y, has yj ≠ 1 = xj for some j ] ≤ n(n/ϵ)ϕϵ = n2ϕ.
For each PO x, ∃ j s.t. yj ≠ c = xj. Maybe c = 0…
Union-bound over c ∈ {0,1}… + another trick.
Our result: Larger d

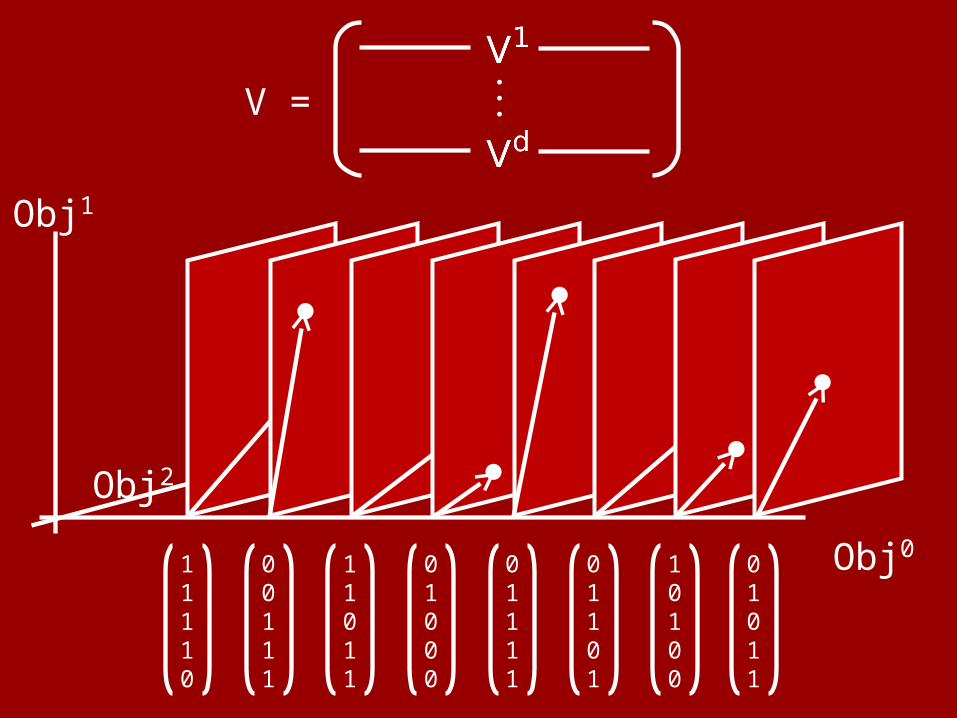
Obj0 arbitrary; Obj1, Obj2 ϕ-semi-random
01011
10100
01101
01111
01000
11011
00111
11110
d=2:
Obj0
Obj1
Obj2
Obj0 01011
10100
01101
01111
01000
11011
00111
11110
Obj1
Obj2
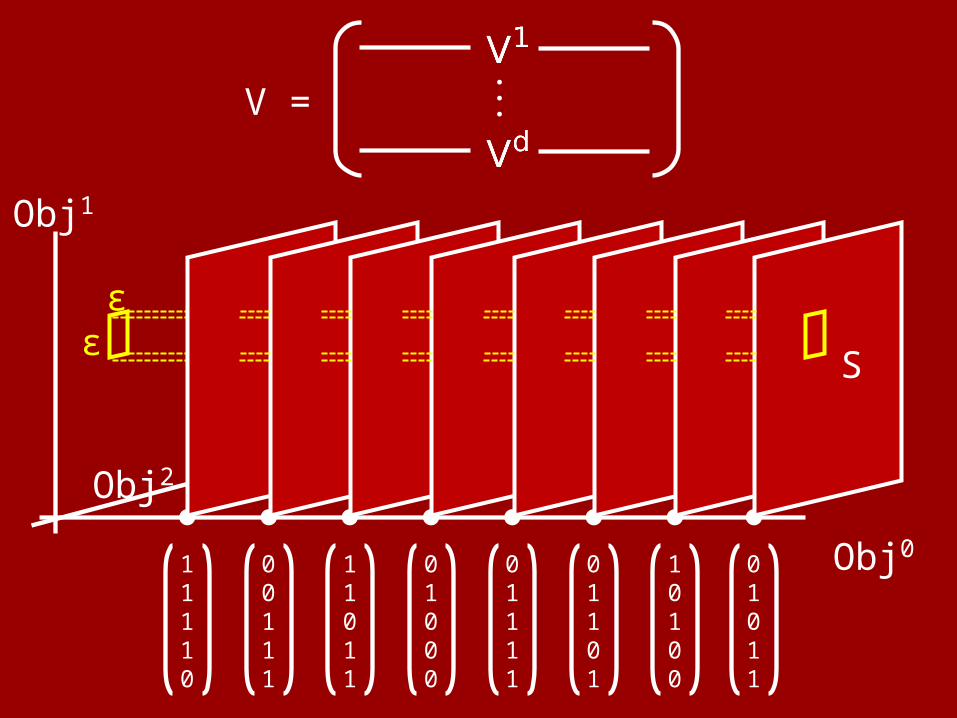
V =
Obj0 01011
10100
01101
01111
01000
11011
00111
11110
Obj2
ϵS
ϵ
Obj1
V =
more complicated event:
Tx,j,S = “x is PO and xj = 1 and Vx ∈ S
and first PO to x’s left, call it y, has yj = 0”
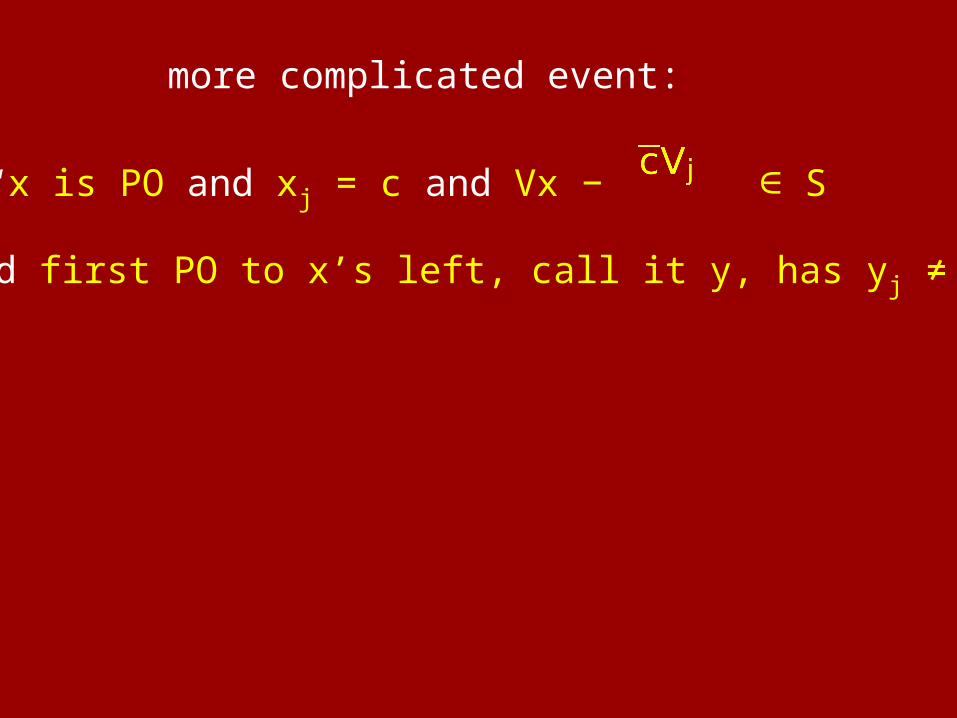
more complicated event:
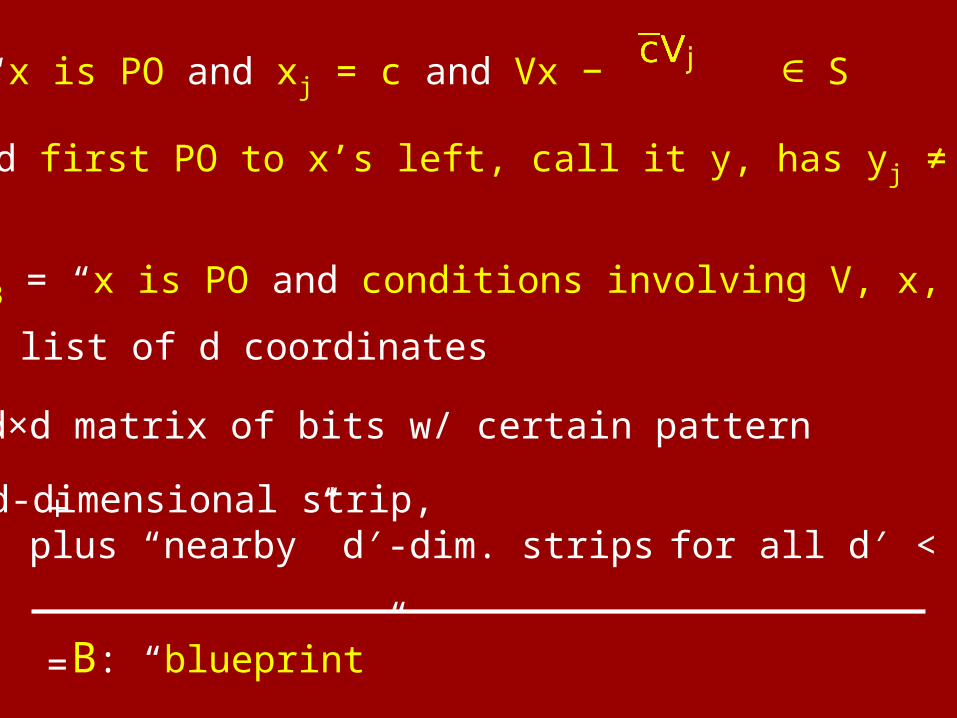
Tx,j,c,S = “x is PO and xj = c and Vx − ∈ S
and first PO to x’s left, call it y, has yj ≠ c”
more complicated event:
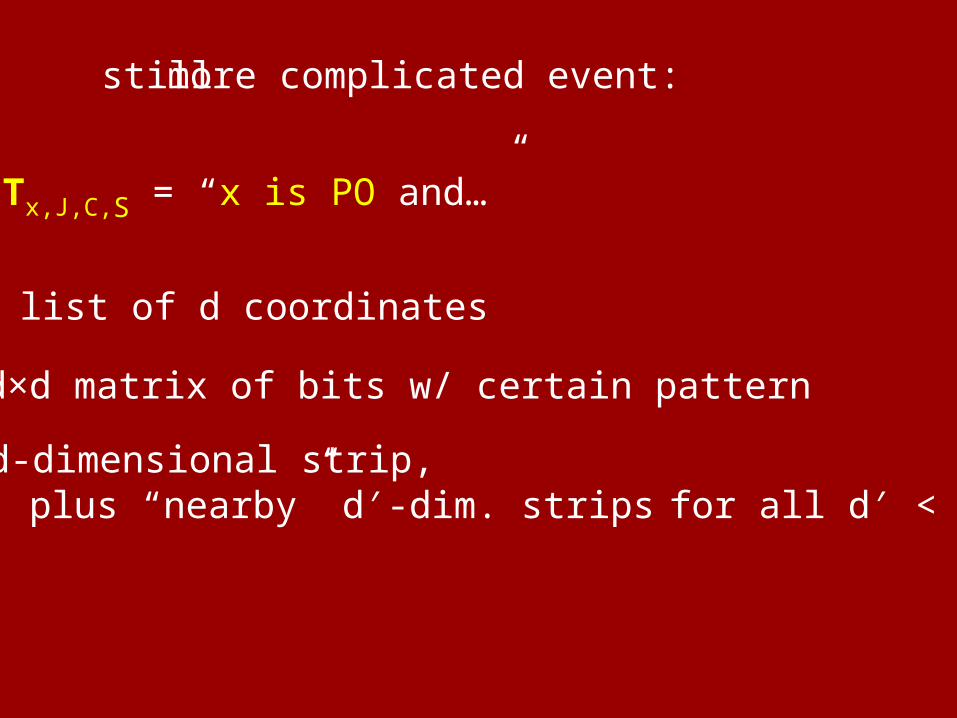
Tx,J,C,S = “x is PO and…”
still
J: list of d coordinates
C: d×d matrix of bits w/ certain pattern
S: d-dimensional strip, plus “nearby” d′-dim. strips for all d′ < d
more complicated event:
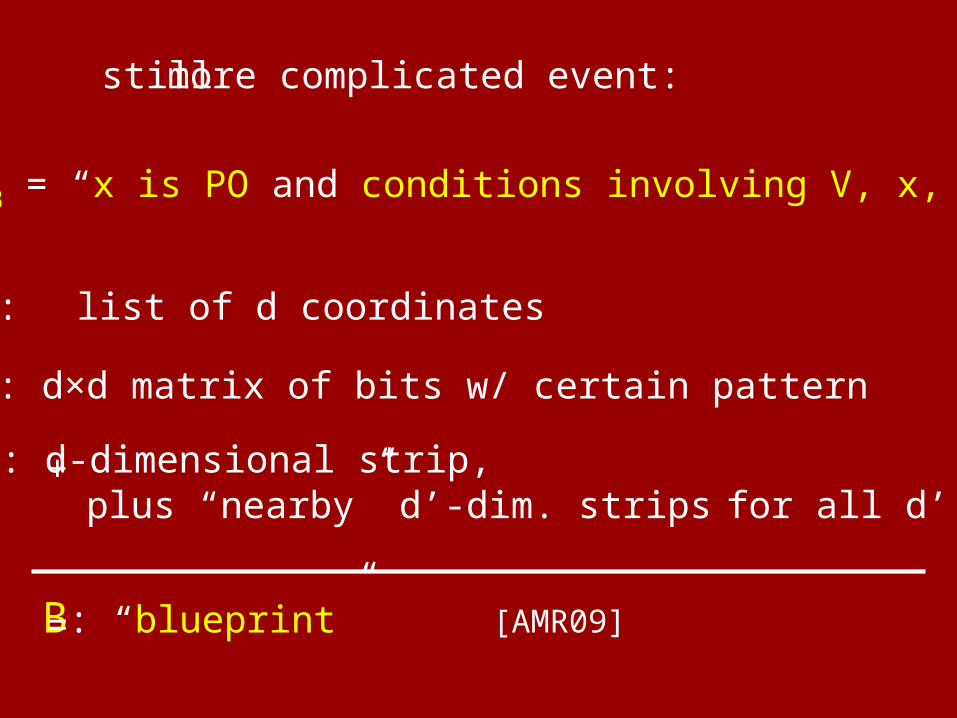
J: list of d coordinates
C: d×d matrix of bits w/ certain pattern
S: d-dimensional strip, plus “nearby” d’-dim. strips for all d’ < d
B: “blueprint” [AMR09]
+
=
Tx,B = “x is PO and conditions involving V, x, B.”
still
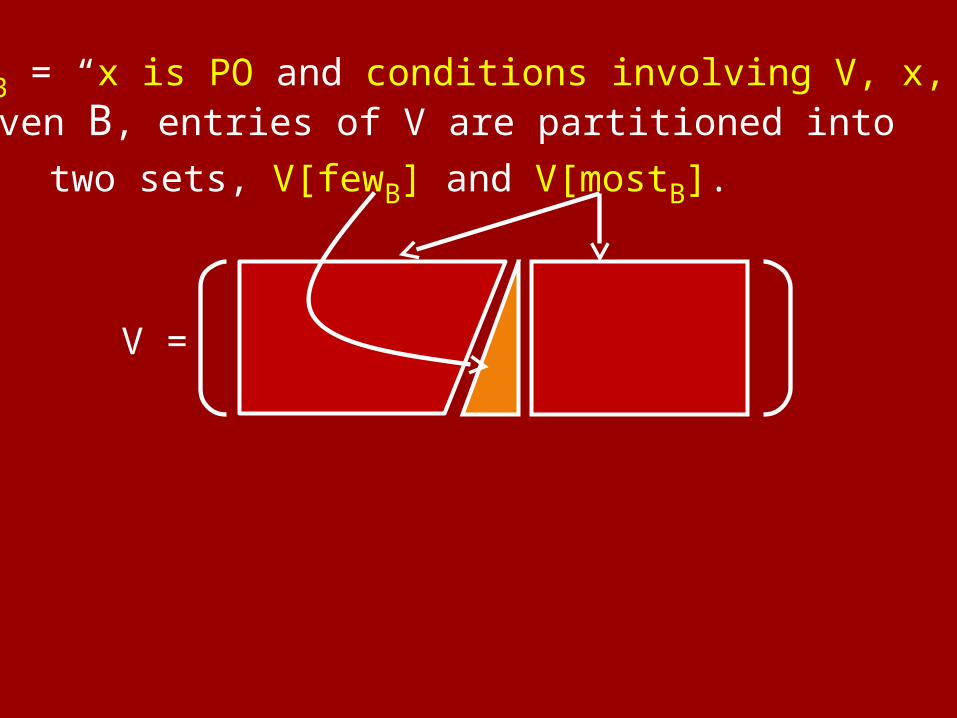
Given B, entries of V are partitioned into
two sets, V[fewB] and V[mostB].
V =
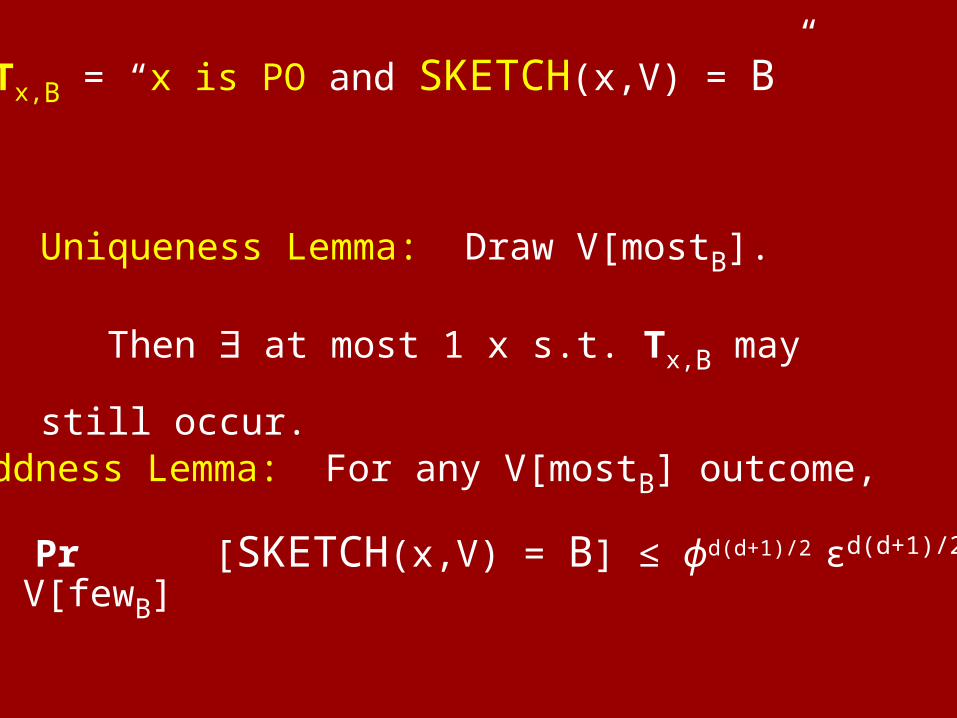
Tx,B = “x is PO and conditions involving V, x, B.”
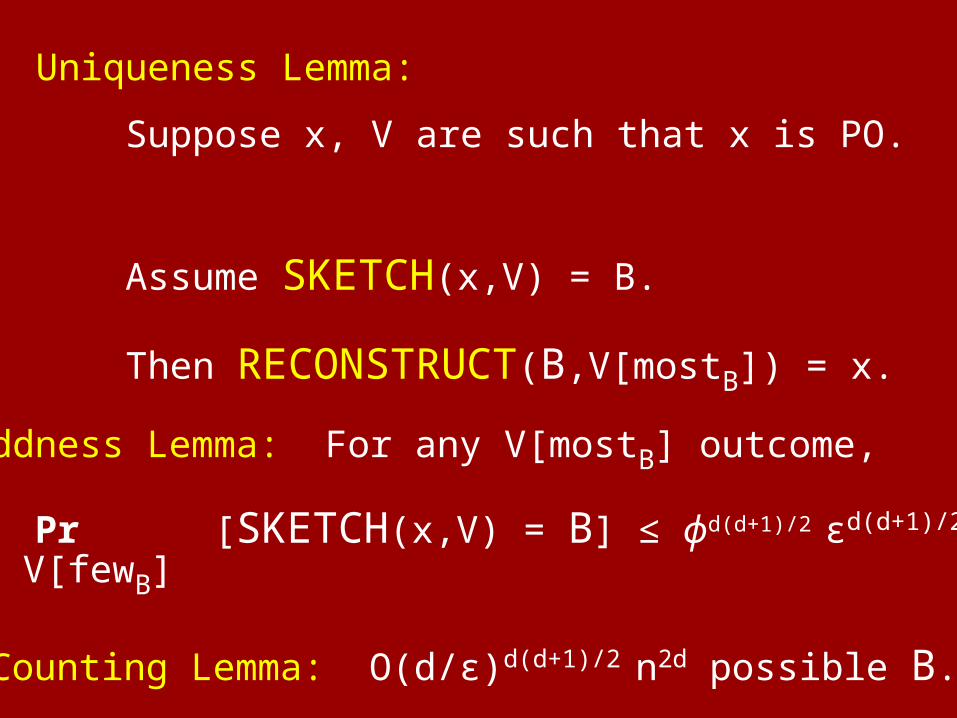
Boundedness Lemma: For any V[mostB] outcome,
Pr [condits involving V, x, B] ≤ ϕd(d+1)/2 ϵd(d+1)/2.
Uniqueness Lemma: Draw V[mostB].
Then ∃ at most 1 x s.t. Tx,B may still
occur.
Tx,B = “x is PO and conditions involving V, x, B.”
V[fewB]
Counting Lemma: O(d/ϵ)d(d+1)/2 n2d possible B.
Union bound ⇒ E[# PO’s] ≤ O(dϕ)d(d+1)/2 n2d.
Given B, entries of V are partitioned into
two sets, V[fewB] and V[mostB].
Tx,j,c,S = “x is PO and xj = c and Vx − ∈ S
and first PO to x’s left, call it y, has yj ≠ c”
J: list of d coordinates
C: d×d matrix of bits w/ certain pattern
S: d-dimensional strip, plus “nearby” d′-dim. strips for all d′ < d
B: “blueprint”
+
=
Tx,B = “x is PO and conditions involving V, x, B.”
Tx,B = “x is PO and SKETCH(x,V) = B”
where SKETCH() is a certain
deterministic algorithm.
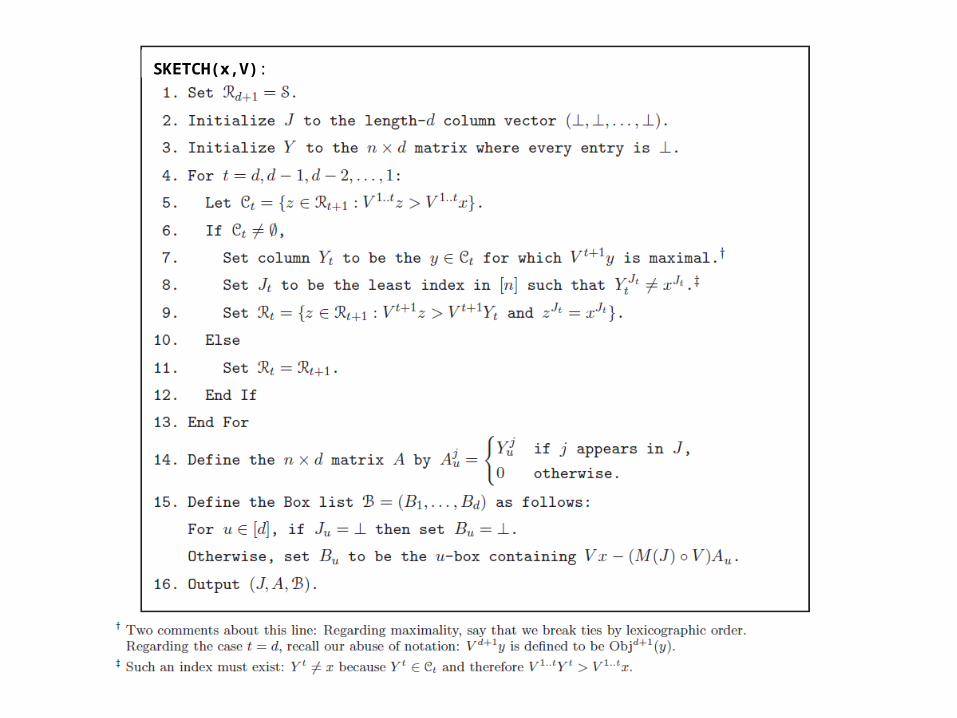
SKETCH(x,V):
Bddness Lemma: For any V[mostB] outcome,
Pr [SKETCH(x,V) = B] ≤ ϕd(d+1)/2 ϵd(d+1)/2.
Uniqueness Lemma: Draw V[mostB].
Then ∃ at most 1 x s.t. Tx,B may still occur.
V[fewB]
Tx,B = “x is PO and SKETCH(x,V) = B”
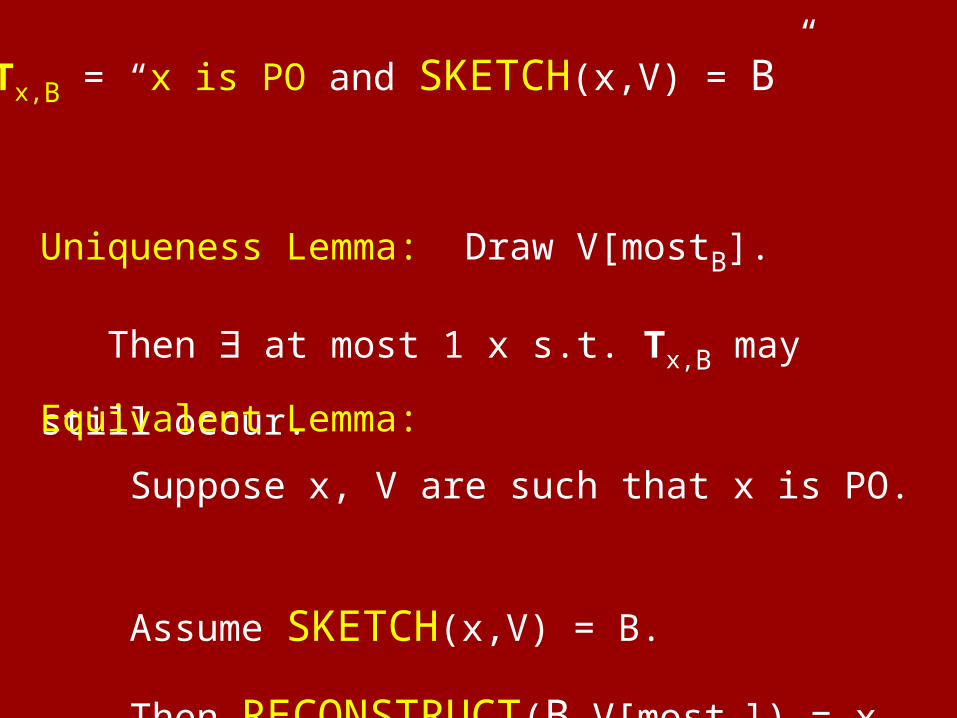
Uniqueness Lemma: Draw V[mostB].
Then ∃ at most 1 x s.t. Tx,B may still occur.
Tx,B = “x is PO and SKETCH(x,V) = B”
Equivalent Lemma:
Suppose x, V are such that x is PO.
Assume SKETCH(x,V) = B.
Then RECONSTRUCT(B,V[mostB]) = x.
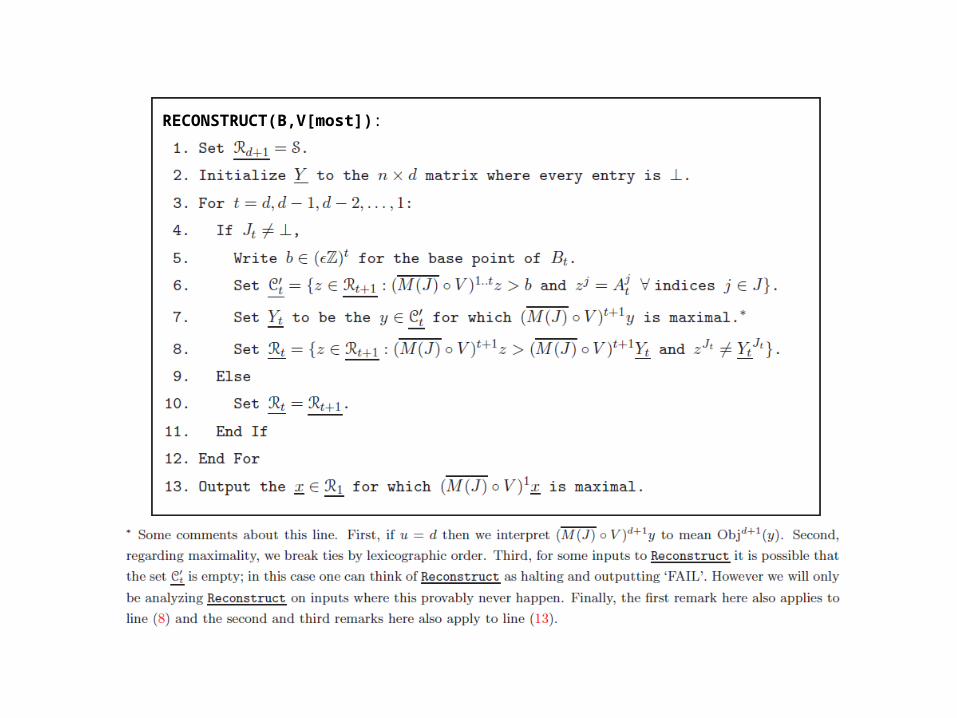
RECONSTRUCT(B,V[most]):
Bddness Lemma: For any V[mostB] outcome,
Pr [SKETCH(x,V) = B] ≤ ϕd(d+1)/2 ϵd(d+1)/2.V[fewB]
Uniqueness Lemma:
Suppose x, V are such that x is PO.
Assume SKETCH(x,V) = B.
Then RECONSTRUCT(B,V[mostB]) = x.
Counting Lemma: O(d/ϵ)d(d+1)/2 n2d possible B.
A sketch of SKETCH(x,V) for d = 2
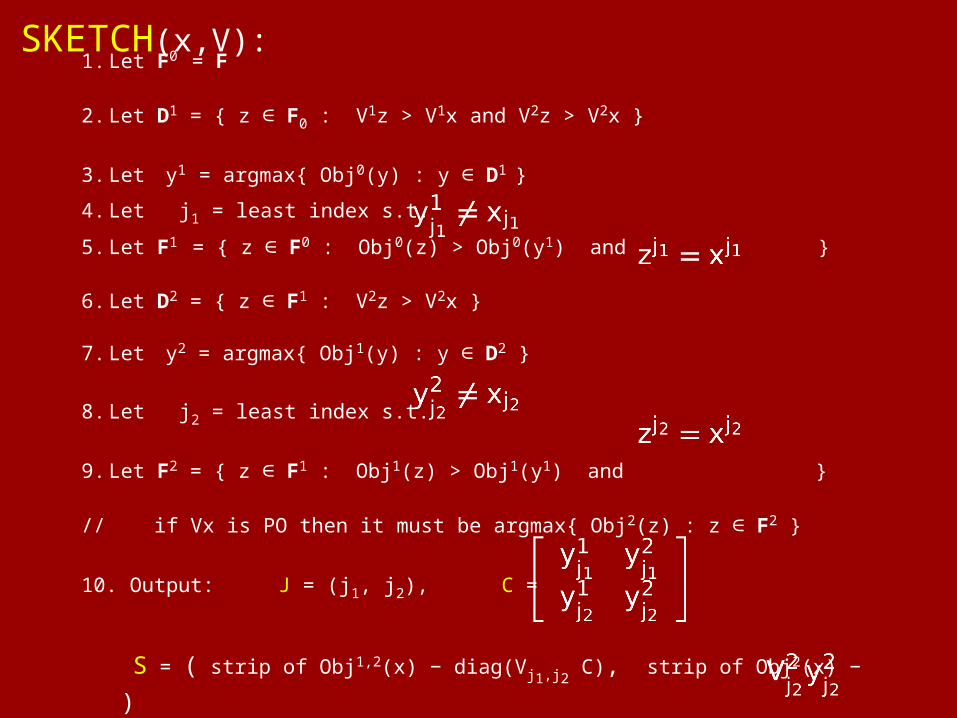
SKETCH(x,V):
1. Let F0 = F
2. Let D1 = { z ∈ F0 : V1z > V1x and V2z > V2x }
3. Let y1 = argmax{ Obj0(y) : y ∈ D1
}
4. Let j1 = least index s.t.
5. Let F1 = { z ∈ F0 : Obj0(z) > Obj0(y1) and }
6. Let D2 = { z ∈ F1 : V2z > V2x }
7. Let y2 = argmax{ Obj1(y) : y ∈ D2 }
8. Let j2 = least index s.t.
9. Let F2 = { z ∈ F1 : Obj1(z) > Obj1(y1) and }
// if Vx is PO then it must be argmax{ Obj2(z) : z ∈ F2 }
10. Output: J = (j1, j2), C =
S = ( strip of Obj1,2(x) − diag(Vj1,j2 C), strip of Obj2(x) − )
SKETCH(x,V):
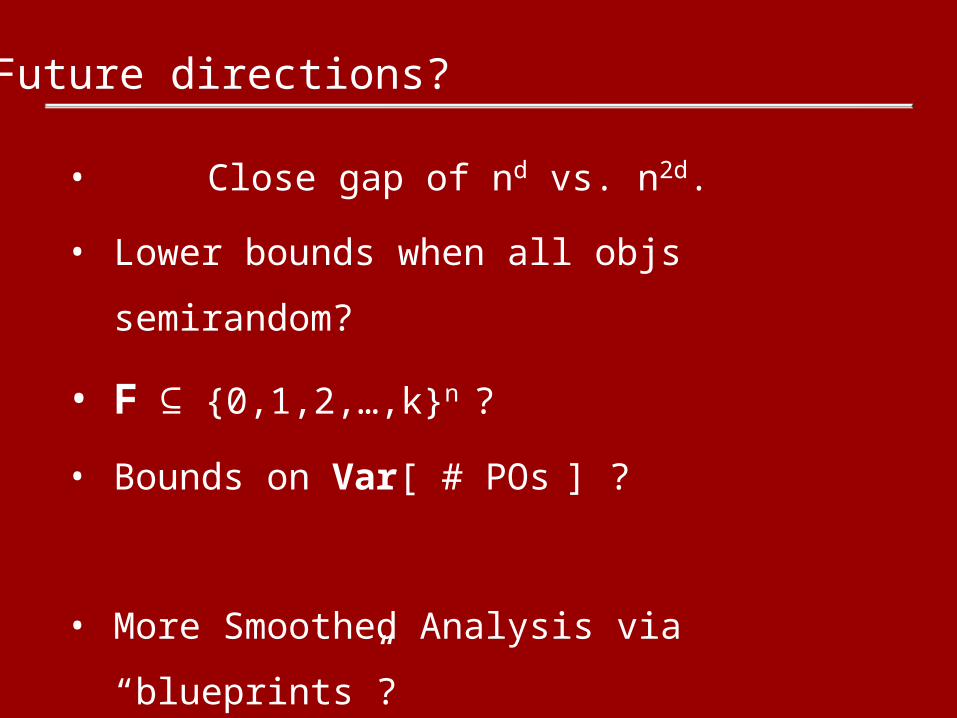
• Close gap of nd vs. n2d.
• Lower bounds when all objs semirandom?
• F ⊆ {0,1,2,…,k}n ?
• Bounds on Var[ # POs ] ?
• More Smoothed Analysis via “blueprints”?
Future directions?





![arXiv:1610.04317v2 [cs.DS] 16 Mar 2017af1p/Teaching/MCC17/Papers/LLL...Approximate Counting, the Lov asz Local Lemma and Inference in Graphical Models Ankur Moitra March 17, 2017 Abstract](https://img.pdfslide.net/doc/110x75/5ac18c8b7f8b9a433f8cfc99/arxiv161004317v2-csds-16-mar-2017-af1pteachingmcc17paperslllapproximate.jpg)