Embed Size (px)
Citation preview
Scientific Computing forX-Ray Computed Tomography
Artifacts and Model Calibration
Martin S. AndersenSection for Scientific Computing
DTU Compute
DTUJanuary 19, 2017
Reconstruction Model
Model assumptions may be flawed or unwarranted
I reconstruction geometry
I calibration errors (white field is estimated)
I source spectrum, energy dependent attenuation
I detector model, nonlinearities (e.g., saturation)
I object motion, vibrations, dynamic process
I noise model
Model versus physics
I Physics → measurements
I Measurements → model+algorithm → reconstruction
1/19
Lambert–Beer revisitedConventional detector
I ≈∫ Emax
0S(E) exp
{−∫lµ(x, y, z, E) ds
}dE
discrete model
I ≈ exp{−aTX}s, Xij = µ(xi, yi, zi, µj), sj = S(Ej)
Spectral detector
Ij ≈∫ Ej+1
Ej
S(E) exp
{−∫lµ(x, y, z, E) ds
}dE, j = 1, . . . , k
discrete model
[I1 · · · Ik] ≈ exp{−aTX}diag(s)
2/19
X-ray attenuation
X-ray attenuation is primarily a function of
I X-ray energy
I atomic number of the material being imaged
I material density
Higher-energy X-rays
I penetrate more effectively than lower-energy ones
I are less sensitive to changes in material density andcomposition
Very different densities and/or atomic constituents → easy todifferentiate
3/19
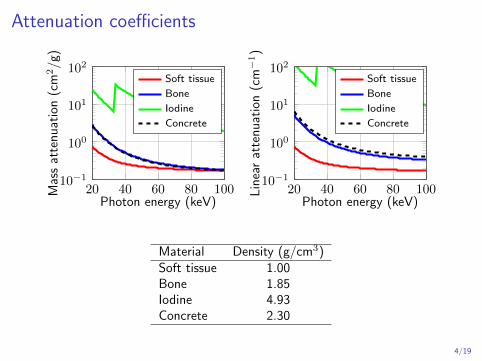
Attenuation coefficients
20 40 60 80 10010−1
100
101
102
Photon energy (keV)
Mas
sat
ten
uat
ion
(cm
2/g
)
Soft tissue
Bone
Iodine
Concrete
20 40 60 80 10010−1
100
101
102
Photon energy (keV)
Lin
ear
atte
nu
atio
n(c
m−1)
Soft tissue
Bone
Iodine
Concrete
Material Density (g/cm3)Soft tissue 1.00Bone 1.85Iodine 4.93Concrete 2.30
4/19
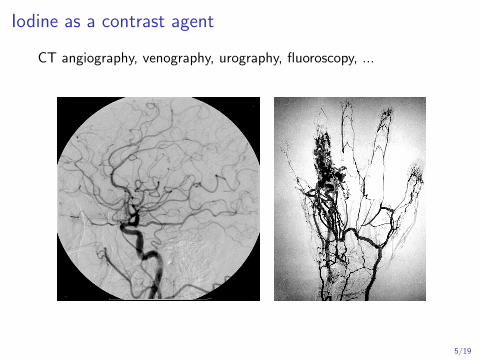
Iodine as a contrast agent
CT angiography, venography, urography, fluoroscopy, ...
5/19
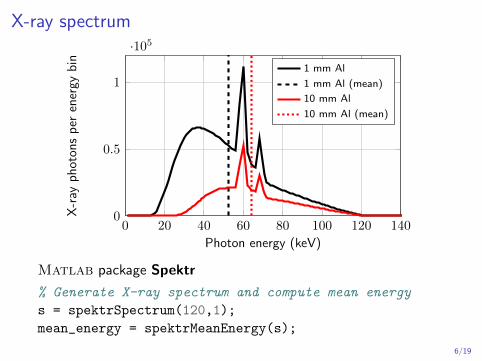
X-ray spectrum
0 20 40 60 80 100 120 1400
0.5
1
·105
Photon energy (keV)
X-r
ayp
hot
ons
per
ener
gyb
in1 mm Al
1 mm Al (mean)
10 mm Al
10 mm Al (mean)
Matlab package Spektr
% Generate X-ray spectrum and compute mean energy
s = spektrSpectrum(120,1);
mean_energy = spektrMeanEnergy(s);
6/19
Beam hardening
Reconstruction methods based on simplified model
I ≈ I0 exp
{−∫lµ(x, y, z) ds
}
I detector nonlinearities (onset threshold, saturation level)I invalid assumptions
I monochromatic beamI energy-independent attenuation
Correction methods
I pre-reconstruction (e.g. dual energy CT)
I post-reconstruction (initial reconstruction + correction)
7/19
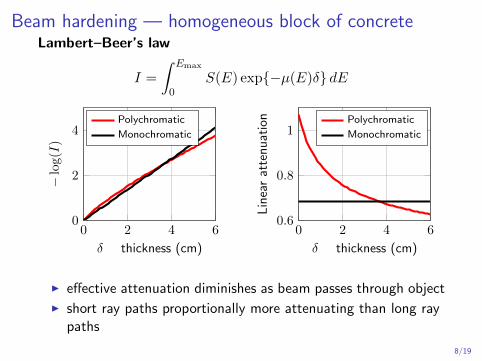
Beam hardening — homogeneous block of concreteLambert–Beer’s law
I =
∫ Emax
0S(E) exp{−µ(E)δ} dE
0 2 4 60
2
4
δ thickness (cm)
−lo
g(I
)
Polychromatic
Monochromatic
0 2 4 60.6
0.8
1
δ thickness (cm)L
inea
rat
ten
uat
ion Polychromatic
Monochromatic
I effective attenuation diminishes as beam passes through object
I short ray paths proportionally more attenuating than long raypaths
8/19
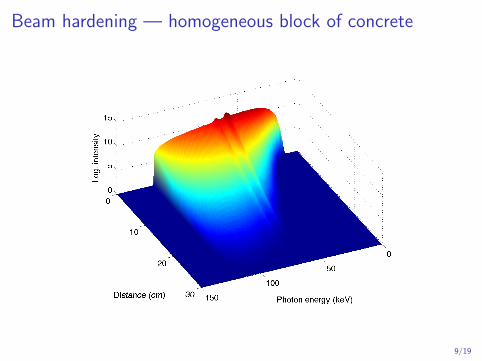
Beam hardening — homogeneous block of concrete
9/19
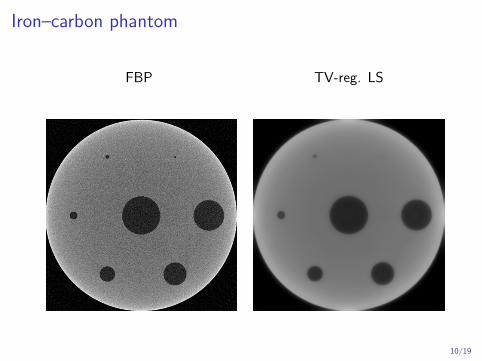
Iron–carbon phantom
FBP TV-reg. LS
10/19
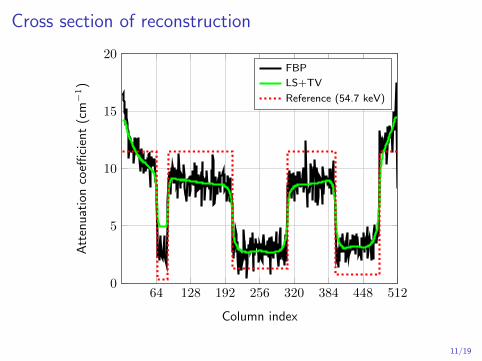
Cross section of reconstruction
64 128 192 256 320 384 448 5120
5
10
15
20
Column index
Att
enu
atio
nco
effici
ent
(cm
−1)
FBP
LS+TV
Reference (54.7 keV)
11/19
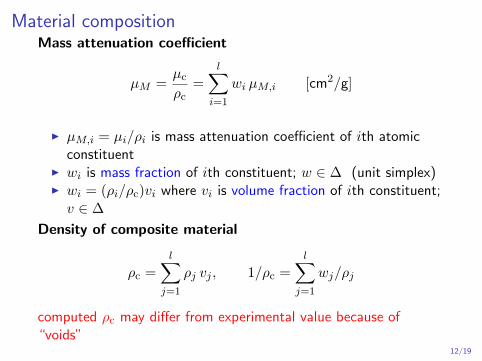
Material compositionMass attenuation coefficient
µM =µcρc
=
l∑i=1
wi µM,i [cm2/g]
I µM,i = µi/ρi is mass attenuation coefficient of ith atomicconstituent
I wi is mass fraction of ith constituent; w ∈ ∆ (unit simplex)I wi = (ρi/ρc)vi where vi is volume fraction of ith constituent;v ∈ ∆
Density of composite material
ρc =
l∑j=1
ρj vj , 1/ρc =
l∑j=1
wj/ρj
computed ρc may differ from experimental value because of“voids”
12/19
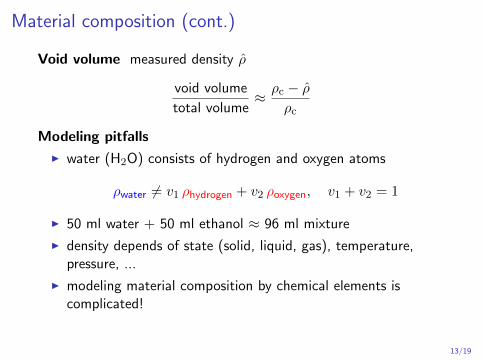
Material composition (cont.)
Void volume measured density ρ̂
void volume
total volume≈ ρc − ρ̂
ρc
Modeling pitfalls
I water (H2O) consists of hydrogen and oxygen atoms
ρwater 6= v1 ρhydrogen + v2 ρoxygen, v1 + v2 = 1
I 50 ml water + 50 ml ethanol ≈ 96 ml mixture
I density depends of state (solid, liquid, gas), temperature,pressure, ...
I modeling material composition by chemical elements iscomplicated!
13/19
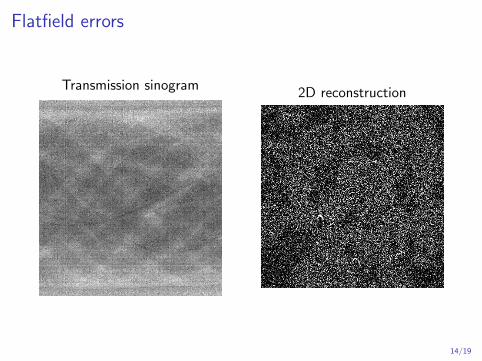
Flatfield errors
Transmission sinogram2D reconstruction
14/19
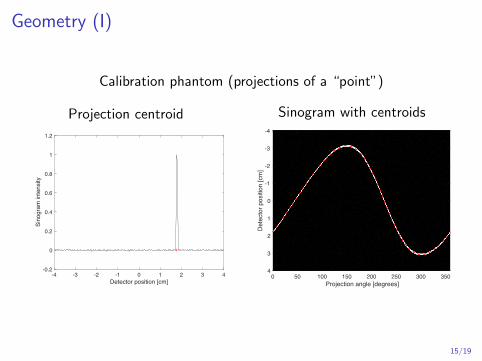
Geometry (I)
Calibration phantom (projections of a “point”)
Projection centroid
-4 -3 -2 -1 0 1 2 3 4Detector position [cm]
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Sino
gram
inte
nsity
Sinogram with centroids
0 50 100 150 200 250 300 350Projection angle [degrees]
-4
-3
-2
-1
0
1
2
3
4
Det
ecto
r pos
ition
[cm
]
15/19
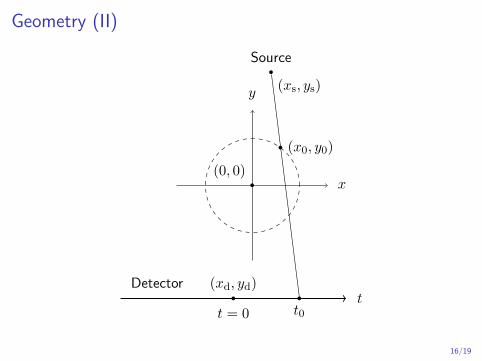
Geometry (II)
(0, 0)
(xs, ys)
(xd, yd)
Source
t = 0
(x0, y0)
Detectort
x
y
t0
16/19
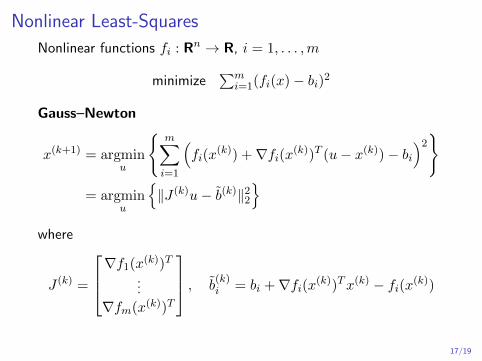
Nonlinear Least-Squares
Nonlinear functions fi : Rn → R, i = 1, . . . ,m
minimize∑m
i=1(fi(x)− bi)2
Gauss–Newton
x(k+1) = argminu
{m∑i=1
(fi(x
(k)) +∇fi(x(k))T (u− x(k))− bi)2}
= argminu
{‖J (k)u− b̃(k)‖22
}where
J (k) =
∇f1(x(k))T
...
∇fm(x(k))T
, b̃(k)i = bi +∇fi(x(k))Tx(k) − fi(x(k))
17/19
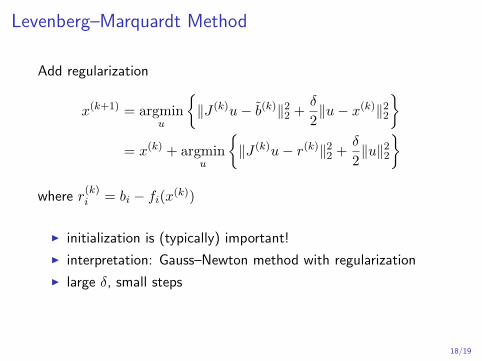
Levenberg–Marquardt Method
Add regularization
x(k+1) = argminu
{‖J (k)u− b̃(k)‖22 +
δ
2‖u− x(k)‖22
}= x(k) + argmin
u
{‖J (k)u− r(k)‖22 +
δ
2‖u‖22
}where r
(k)i = bi − fi(x(k))
I initialization is (typically) important!
I interpretation: Gauss–Newton method with regularization
I large δ, small steps
18/19
References I
[Lev44] K. Levenberg. “A Method for the Solution of Certain Non-LinearProblems in LEast Squares”. In: Quarterly of Applied Mathematics2.2 (1944), pp. 164–168. url:http://www.jstor.org/stable/43633451.
[Mar63] D. W. Marquardt. “An Algorithm for Least-Squares Estimation ofNonlinear Parameters”. In: Journal of the Society for Industrialand Applied Mathematics 11.2 (June 1963), pp. 431–441. doi:10.1137/0111030. url: https://doi.org/10.1137/0111030.
[Gul+87] G. T. Gullberg et al. “Estimation of geometrical parameters for fanbeam tomography”. In: Physics in Medicine and Biology 32.12(1987), p. 1581. url:http://stacks.iop.org/0031-9155/32/i=12/a=005.
[NW06] J. Nocedal and S. J. Wright. Numerical Optimization. 2nd.Springer, 2006.
19/19





























