Embed Size (px)
Citation preview
Lectures inPROJECTIVEGEOMETRY
A. SEIDENBERG
DOVER PUBLICATIONS, INC.Mineola, New York
ono
GL
.
O';;
Bibliographical Note
This Dover edition, first published in 2005, is an unabridged republicationof the edition published by D. Van Nostrand Company, Inc., Princeton,New Jersey, 1962.
Library of Congress Cataloging-in-Publication Data
Seidenberg, A. (Abraham), 1916-Lectures in projective geometry / A. Seidenberg.
p. cm.Originally published: Princeton, N.J. : Van Nostrand, 1962, in series:
The university series in undergraduate mathematics.Includes bibliographical references and index.ISBN 0-486-44618-2 (pbk.)
1. Geometry, Projective. 2. Geometry, Analytic. I. Title.
QA471.S42 2005516'.5-dc22
2005051967
Manufactured in the United States of AmericaDover Publications, Inc., 31 East 2nd Street, Mineola, N.Y. 11501
fit;
tai
.+a
gyp
map
Per
...
off;,fuse.t7
ebb
PREFACE
The purpose of this book is to provide a text for an undergraduatecourse in Projective Geometry. The axiomatic approach to this subject isundoubtedly the proper one, but it seems desirable, if not necessary, tostart from what the student knows, namely high school geometry, andlead him from there to new things. Accordingly, the first chapter is devotedto introducing some of the main topics in as naive a form as possible. Thesubject is then begun on an axiomatic basis in the second chapter.
The axiomatic method began in geometry, and projective geometry isan especially suitable subject in which to illustrate the leading ideas ofthe method. In his previous studies, the student has been asked to takemany things for granted. Here, however, he is engaged in a study in whichall the elements are in clear view from the beginning.
Aside from the intrinsic interest of projective geometry, there is thefact that the main events of algebraic geometry, one of the principalbranches of mathematics, take place in projective spaces. Therefore pro-jective spaces are "something everyone has to know." To be sure, thisbasic minimum of knowledge can be conveyed efficiently by defining apoint of n-space to be a class { (pxo, pxl, . . . , px.)} of (n + 1)-tuples, etc.;but having committed ourselves to the axiomatic method, we are led toshowing how coordinates may be introduced on the basis of Pappus'Theorem (in the commutative case) and Desargues' Theorem (in thenoncommutative case).
To a large extent, the book deals only with what might be called funda-mental: homogeneous coordinates, higher-dimensional spaces, conies,linear transformations, quadric surfaces. Still, a number of topics areentered upon in order to achieve depth, always within the limitations setby the prerequisites for the book, namely, high school geometry andalgebra. Among these are the discussion on intersection multiplicities inthe case of a pair of cones, the Jordan canonical form, and the factorizationof a linear transformation into polarities.
The derivation of Euclidean geometry from projective is touched uponbut not entered into systematically: this derivation is undoubtedly a mainaspect of the subject, but it lies beyond the goal of this book. A biblio-
v
Vi PREFACE
graphical note is appended which may be helpful to the student in broad-ening and deepening his study on the topics considered, and which alsodirects him to allied but more advanced subjects.
Berkeley, California A. S.
November 1961
7e?
coo
ear
.-.404a
c°,
°., ...
1-4
CONTENTS
CHAPTER I. PROJECTIVE GEOMETRY AS AN EXTENSIONOF HIGH SCHOOL GEOMETRY 1
1. Two approaches to projective geometry 1
2. An initial question 23. Projective invariants 34. Vanishing points 45. Vanishing lines 5
6. Some projective noninvariants 67. Betweenness 78. Division of a segment in a ratio 89. Desargues' Theorem 9
10. Perspectivity; projectivity 1211. Harmonic tetrads; fourth harmonic 1512. Further theorems on harmonic tetrads 2013. The cross-ratio 2114. Fundamental Theorem of Projective Geometry 2515. Further remarks on the cross-ratio 2716. Construction of the projective plane 3017. Previous results in the constructed plane 3318. Analytic construction of the projective plane 3419. Elements of linear equations 38
CHAPTER II. THE AXIOMATIC FOUNDATION 42
1. Unproved propositions and undefined terms 422. Requirements on the axioms and undefined terms 423. Undefined terms and axioms for a projective plane 434. Initial development of the system; the Principle of Duality 435. Consistency of the axioms 496. Other models 517. Independence of the axioms 53
vii
C']
tai !''
'-4
't7
6.+
6.+
6.+
6.+
M-'
viii CONTENTS
8. Isomorphism 559. Further axioms 56
10. Consequences of Desargues' Theorem 6011. Free planes 65
CHAPTER III. ESTABLISHING COORDINATESIN A PLANE 68
1. Definition of a field 682. Consistency of the field axioms 713. The analytic model 724. Geometric description of the operations plus and times 765. Setting up coordinates in the projective plane 786. The noncommutative case 86
CHAPTER IV. RELATIONS BETWEEN THEBASIC THEOREMS 89
CHAPTER V. AXIOMATIC INTRODUCTION OFHIGHER-DIMENSIONAL SPACE 96
1. Higher-dimensional, especially 3-dimensional projective space 962. Desarguesian planes and higher-dimensional space 102
CHAPTER VI. CONICS 106
1. Study of the conic on the basis of high school geometry 1062. The conic, axiomatically treated 1123. The polar 1154. The polar, axiomatically treated 1175. Polarities 121
CHAPTER VII. HIGHER-DIMENSIONALSPACES RESUMED 122
1. Theory of dependence 1222. Application of the dependency theory to geometry 1263. Hyperplanes 1334. The dual space 1345. The analytic case 137
1-+
--4
r-1
CONTENTS ix
CHAPTER VIII. COORDINATE SYSTEMS ANDLINEAR TRANSFORMATIONS 141
1. Coordinate systems 1412. Determinants 1503. Coordinate systems resumed 1524. Coordinate changes, alias linear transformations 1535. A generalization from n = 2 to n = 1 1556. Linear transformations on a line and from one line to another 1577. Cross-ratio 1598. Coordinate systems and linear transformations in higher-
dimensional spaces 1609. Coordinates in affine space 162
CHAPTER IX. COORDINATE SYSTEMSABSTRACTLY CONSIDERED 165
1. Definition of a coordinate system 1652. Definition of a geometric object 1703. Algebraic curves 1724. A short out to PNK 1745. A result for the field of real numbers 174
CHAPTER X. CONIC SECTIONS ANALYTICALLYTREATED 177
1. Derivation of equation of conic 1772. Uniqueness of the equation 1823. Projective equivalence of conics 1834. Poles and polars 184
5. Polarities and conics 190
APPENDIX TO CHAPTER X 193
Al. Factorization of linear transformations into polarities 193
CHAPTER XI. COORDINATES ON A CONIC 197
1. Coordinates on a conic 197
2. Projectivities on a conic 199
cep
00o0X CONTENTS
CHAPTER XII. PAIRS OF CONICS 203
1. Pencils of conics 2032. Intersection multiplicities 204
CHAPTER XIII. QUADRIC SURFACES 208
1. Projectivities between pencils of planes 2082. Reguli and quadric surfaces 2103. Quadric surfaces over the complex field 2134. Some properties of the sphere 214
CHAPTER XIV. THE JORDAN CANONICAL FORM 218
BIBLIOGRAPHICAL NOTE 226
INDEX 229
pip
!'r
p,'
...
ram
C3"
°m'
^D'
IF!
'ti
+R
'
a.......
+°4
CHAPTER I
PROJECTIVE GEOMETRY AS AN EXTENSION OFHIGH SCHOOL GEOMETRY
1. Two approaches to projective geometry. There are two ways tostudy projective geometry: (1) as a continuation of Euclidean geo-metry as usually taught in high schools, and (2) as an independentdiscipline, with its own definitions, axioms, theorems, etc. Of thesetwo ways, the first corresponds to the actual historical development ofthe subject. As Euclidean geometry developed, a large body oftheorems having a common character was built up, and theorems havingthat character (which we will describe more explicitly below) were calledprojective theorems. But precisely because projective geometry arosefrom Euclidean geometry, attention began to be directed more and moreto the axioms. It was for this reason that the so-called "axiomaticmethod," which nowadays is applied in all branches of mathematics,was first applied to projective geometry, from which subject it graduallyspread to all the others.
Of the two ways of studying the subject, each has disadvantages.As to the first method, although Euclid may have been definite enoughabout his axioms, the high schools frequently are not, and as a conse-quence one is never quite sure what these axioms were. This is alsopartly the fault of Euclid, and today we can be somewhat more exactthan he was. Another disadvantage is that projective geometry con-sists of theorems of a certain special type, so that Euclid's axioms, evenif made precise, are not entirely suitable.
The axiomatic method of introducing the subject also has disadvan-tages. For one thing, one has to enter somewhat fully into what isinvolved in an axiomatic system, and this takes us away from geo-metry and other fairly familiar things to things that at first sight mayseem to be bizarre and to have no bearing on the subject. Besides, thecontent of an axiomatic system depends on what we want to study :for algebra we would have one system of axioms ; for geometry, another ;
i
.d,'4"
.24
gy'm'"
^.N
...
2 LECTURES IN PROJECTIVE GEOMETRY CaeP. 1
therefore if we really want to come to grips with geometric problems,we have to-know, first, roughly what these problems are.
Of the two methods, we will start with the first. Since we do not sayprecisely what we are assuming, we shall never be able to tell preciselywhat we are proving. This kind of situation always gives rise to mis-understandings, especially if we insist that we are actually provingthings. The first chapter will therefore not be directed toward estab-
FIG. 1.1 FIG. 1.2
lishing theorems with complete rigor, but toward supplying backgroundmaterial that will be helpful in the axiomatic method part of the book.At the same time, although we will not insist upon complete rigor,neither will we allow ourselves to make obvious mistakes in logic.
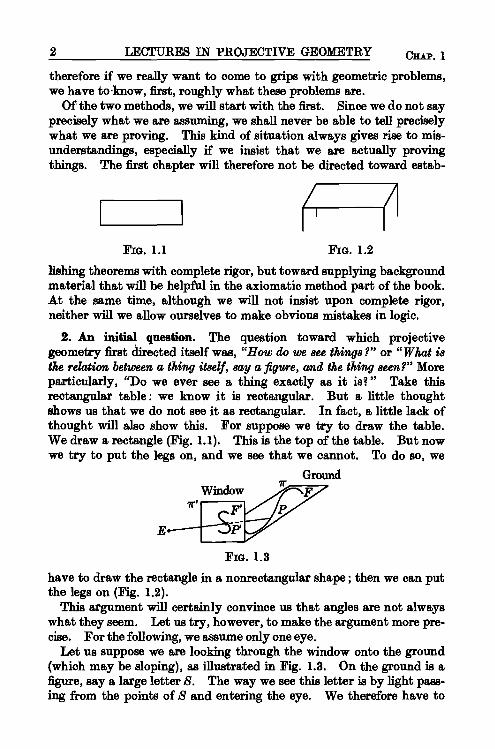
2. An initial question. The question toward which projectivegeometry first directed itself was, "How do we see things?" or "What isthe relation between a thing itself, say a figure, and the thing seen?" Moreparticularly, "Do we ever see a thing exactly as it is?" Take thisrectangular table : we know it is rectangular. But a little thoughtshows us that we do not see it as rectangular. In fact, a little lack ofthought will also show this. For suppose we try to draw the table.We draw a rectangle (Fig. 1.1). This is the top of the table. But nowwe try to put the legs on, and we see that we cannot. To do so, we
Ground
FiG. 1.3
have to draw the rectangle in a nonrectangular shape ; then we can putthe legs on (Fig. 1.2).
This argument will certainly convince us that angles are not alwayswhat they seem. Let us try, however, to make the argument more pre-cise. For the following, we assume only one eye.
Let us suppose we are looking through the window onto the ground(which may be sloping), as illustrated in Fig. 1.3. On the ground is afigure, say a large letter S. The way we see this letter is by light pass-ing from the points of S and entering the eye. We therefore have to
Zap
CD
R
Am
y
F°!
lye,r,
aid
4O'
°.°
SEC. 3 EXTENSION OF HIGH SCHOOL GEOMETRY 3
consider lines joining the point E, representing the eye, to the variouspoints of the figure S. These lines out the windowpane in variouspoints. If P is a point of S, let EP cut the windowpane in a point P',which let us call the image of P : the set of all the images of the pointsof the figure 8 will be called the image of S, or its projection (from E).We have two figures, then, the figure F, on the ground, and the figureF', on the windowpane. Since the rays of light emerging from F' andreaching E are the same as those emerging from F and reaching E, it isclear that as far as shape is concerned, we see the figure F' in preciselythe same way we see the figure F.
Our original question becomes essentially the following : What i8 therelation between a figure F, given in a plane it, and its projection inanother plane ir' ? (The projection is said to be from it to ir' with centerE.) Or "What properties of the figure F are also found in F' ?" It
Paper
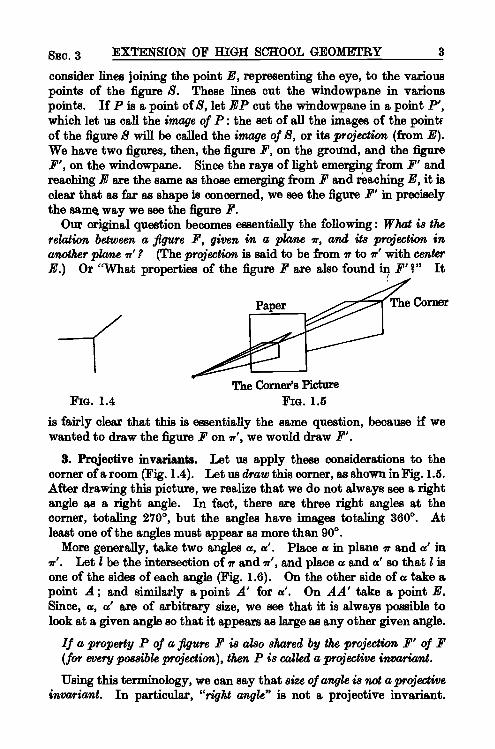
The Corner's PictureFia. 1.4 FIG. 1.5
is fairly clear that this is essentially the same question, because if wewanted to draw the figure F on ir', we would draw Y.
3. Projective invariants. Let us apply these considerations to thecorner of a room (Fig. 1.4). Let us draw this corner, as shown in Fig. 1.5.After drawing this picture, we realize that we do not always see a rightangle as a right angle. In fact, there are three right angles at thecorner, totaling 270°, but the angles have images totaling 360°. Atleast one of the angles must appear as more than 90°.
More generally, take two angles a, a'. Place a in plane it and a' inir'. Let d be the intersection of it and ir', and place a and a' so that l isone of the sides of each angle (Fig. 1.6). On the other side of a take apoint A ; and similarly a point A' for a'. On AA' take a point E.Since, a, a' are of arbitrary size, we see that it is always possible tolook at a given angle so that it appears as large as any other given angle.
If a property P of a figure F is also Shared by the projection F' of F(for every possible projection), then P is called a projective invariant.
Using this terminology, we can say that size of angle is not a projectiveinvariant. In particular, "right angle" is not a projective invariant.
j4$
4 LECTURES IN PROJECTIVE GEOMETRY CH" 1
Since A, A' in Fig. 1.6 could be taken arbitrarily far from 0, we see thatdistance is not a projective invariant.
One may now ask for an example of a property that is a projectiveinvariant. Roughly speaking, a point is a pr 5ective invariant (or theproperty of a figure that it be a point is a projective invariant-but wewill express ourselves more simply in the above way ; we will also saythat & point is a projectively invariantive concept). A line is-a projectiveinvariant, at least roughly speaking, because if we see a plane object as aline, then it is a line. (We say "roughly speaking," because there is aslight qualification that must be made, which we shall,come to shortly.)
E
Fia. 1.6
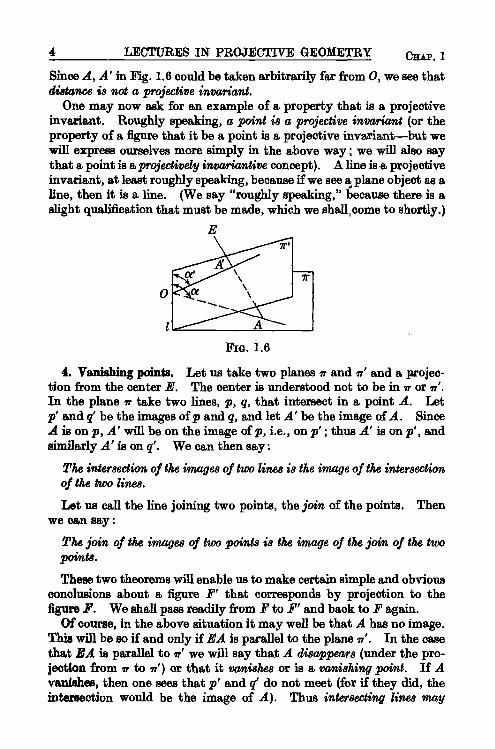
4. Vanishing points. Let us take two planes it and ir' and a projec-tion from the center E. The center is understood not to be in it or ir'.In the plane it take two lines, p, q, that intersect in a point A. Letp' and q' be the images of p and q, and let A' be the image of A. SinceA is on p, A' will be on the image of p, i.e., on p'; thus A' is on p', andsimilarly A' is on q'. We can then say :
The intersection of the images of two lines is the image of the intersectionof the two lines.
Let us call the line joining two points, the join of the points. Thenwe can say :
The join of the images of two points is the image of the join of the twopoints.
These two theorems will enable us to make certain simple and obviousconclusions about a figure F that corresponds by projection to thefigure F. We shall pass readily from F to F' and back to F again.
Of course, in the above situation it may well be that A has no image.This will be so if and only if EA is parallel to the plane a'. In the casethat EA is parallel to rr' we will say that A disappears (under the pro-jection from it to ir') or that it vanishes or is a vanishing point. If Avanishes, then one sees that p' and q' do not meet (for if they did, theintersection would be the image of A). Thus intersecting lines may
o4'r,,
P°1.-1
SEC. 5 EXTENSION OF HIGH SCHOOL GEOMETRY 5
project into parallel lines; and projecting back from Ir' to IT, we see thatparallel lines may project into intersecting lines. Parallelism is not aprojective invariant. If A is a vanishing point, then the whole systemof lines passing through A projects into a system of parallel lines in a'.Regarding this plane Ir' as the ground (as above) and IT as the window-pane, we see why a system of parallel lines appears as a system of linespassing through a point.
5. Vanishing lines. Let A be a vanishing point. Then A has noimage. Because of this we cannot. say that a point is a projectiveinvariant, because if a figure F consists of just one point A, then itsimage F' may consist of no points at all. This is a difficulty, but it is adifficulty we want to surmount. The Greeks called this saving thephenomenon. We want to save the idea that a point is a projectiveinvariant. On the other hand, size of angle is not a projective invariant,and, moreover, we do not want to save the concept.
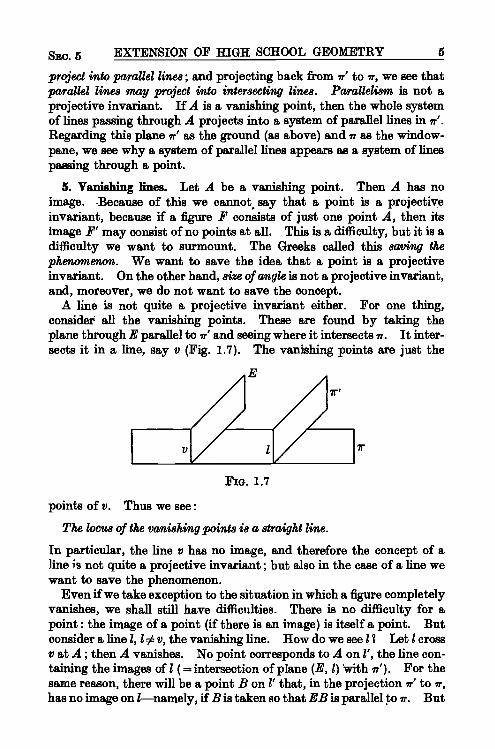
A line is not quite a projective invariant either. For one thing,consider all the vanishing points. These are found by taking theplane through E parallel to ir' and seeing where it intersects ir. It inter-sects it in a line, say v (Fig. 1.7). The vanishing points are just the
Fro. 1.7
points of v. Thus we see :
The locus of the vanishing points is a straight line.
In particular, the line v has no image, and therefore the concept of aline is not quite a projective invariant; but also in the case of a line wewant to save the phenomenon.
Even if we take exception to the situation in which a figure completelyvanishes, we shall still have difficulties. There is no difficulty for apoint : the image of a point (if there is an image) is itself a point. Butconsider a line 1, l o v, the vanishing line. How do we see l ? Let l crossv at A ; then A vanishes. No point corresponds to A on 1', the line con-taining the images of l (= intersection of plane (E, 1) with Tr'). For thesame reason, there will be a point B on l' that, in the projection ,r' to IT,has no image on 1-namely, if B is taken so that EB is parallel to ir. But
ago
f+,
BC
D
Gm
'
C+
0
ti,ra
y
Cod
ate
6 LECTURES IN PROJECTIVE GEOMETRY CH 1
then B is not the image of any point of 1. Thus the image of l is not 1',but 1' minus the point B. Thus a line is seen as a line minus a point.One might then try line minus a point as a projective invariant. But e,line minus a point would be seen as a line minus two points ; and a lineminus two points as a line minus three points, etc. The best we canget out of these considerations is :
The projection of a figure F consisting of a finite number of lines minusa finite number of points is itself a figure F' consisting of a finite numberof lines minus a finite number of points.
This saves the phenomenon, but we shall have a better way.
6. Some projective noninvariants. The kind of geometrical objectswe would like to study in projective geometry are the projectivelyinvariantive objects. Thus, distance is out, size of angle is out, and so isparallelism. Let us then consider some of the other familiar concepts,partly to clear the way. Take a circle. Does it necessarily appear as a
FIG. 1.8
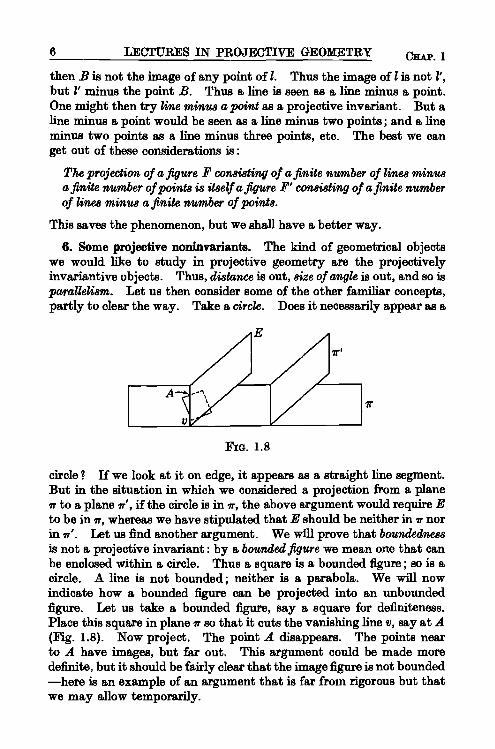
circle? If we look at it on edge, it appears as a straight line segment.But in the situation in which we considered a projection from a planeit to a plane ir', if the circle is in ir, the above argument would require Eto be in ir, whereas we have stipulated that E should be neither in it norin ir'. Let us find another argument. We will prove that boundednessis not a projective invariant : by a bounded figure we mean one that canbe enclosed within a circle. Thus a square is a bounded figure ; so is acircle. A line is not bounded ; neither is a parabola. We will nowindicate how a bounded figure can be projected into an unboundedfigure. Let us take a bounded figure, say a square for definiteness.Place this square in plane it so that it cuts the vanishing line v, say at A(Fig. 1.8). Now project. The point A disappears. The points nearto A have images, but far out. This argument could be made moredefinite, but it should be fairly clear that the image figure is not bounded-here is an example of an argument that is far from rigorous but thatwe may allow temporarily.
cry
CS
R
gym
-,go
b
?'°7
d
SEC. 7 EXTENSION OF HIGH SCHOOL GEOMETRY 7
The argument shows not only that boundedness is not a projectiveinvariant, but that any bounded figure can be projected into an un-bounded figure. In particular, a circle can be so projected, so the con-cept of a circle is not a projectively invariantive concept.
Exercises
1. If A, B are two points on a circle and P varies on the circle, then angleAPB remains constant (at least if P stays on one of the two arcs into whichA and B divide the circle). Use this fact (instead of the notion of bounded-ness) to prove that a circle is not a projective invariant.
2. Let P' be the image of a point P under a projection. We shall makeuse of the fact that if Q approaches P, then Q', the image of Q, approaches P'.Let 1, m be lines through P, l fixed, m variable ;1', m' their images. Show thatif m approaches 1, then m' approaches 1'.
3. With the notation of the preceding exercise, let 0 be a curve through Pand let Q be a point on C approaching P. Then the limiting position of PQas Q approaches P is the tangent to C at P. Two curves C, D through P arecalled tangent at P if they have the same tangent at P. Let C, D be tangentat P. Show that under projection the curves C, D go over into tangent curvesat P'. In other words, tangency is a projective invariant.
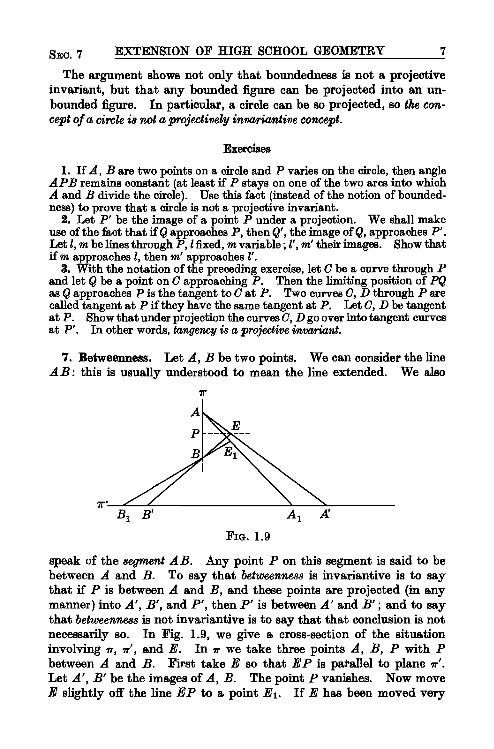
7. Betweenness. Let A, B be two points. We can consider the lineAB: this is usually understood to mean the line extended. We also
Bi B' Al
Frs. 1.9
speak of the segment AB. Any point P on this segment is said to bebetween A and B. To say that betweenness is invariantive is to saythat if P is between A and B, and these points are projected (in anymanner) into A', B', and P', then P' is between A' and B'; and to saythat betweenness is not invariantive is to say that that conclusion is notnecessarily so. In Fig. 1.9, we give a cross-section of the situationinvolving IT, Ir', and E. In it we take three points A, B, P with Pbetween A and B. First take E so that EP is patallel to plane ir'.Let A', B' be the images of A, B. The point P vanishes. Now moveE slightly off the line EP to a point El. If E has been moved very
GA
D
MA
C
cog
mom
.NO
8 LECTURES IN PROJECTIVE GEOMETRY CHAT I
little, the image Al of A from the center E1 will be near A', the imageof B1 of B near B', and the image of P will exist but be far out, hencecertainly not between Al and B1. Thus betweennes8 is not a projectiveinvariant.
Exercise. Aline divides the plane into two parts, which maybe called thesides of the line. Show that the concept side of a line is not a projectivelyinvariantive concept. (This could be done, for example, by showing that iftwo points lie in different sides of l in vr, their images may well lie in the sameside of 1', the image of 1.)
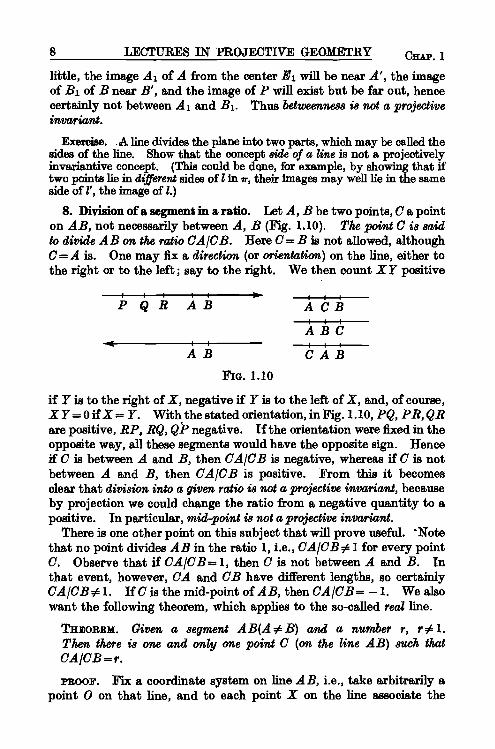
8. Division of a segment in a ratio. Let A, B be two points, C a pointon AB, not necessarily between A, B (Fig. 1.10). The point C i8 Saidto divide AB on the ratio CA/CB. Here C=B is not allowed, althoughC =A is. One may fix a direction (or orientation) on the line, either tothe right or to the left ; say to the right. We then count %Y positive
P Q R A B A CBABC
AB CABFIG}. 1.10
if Y is to the right of X, negative if Y is to the left of X, and, of course,X Y = 0 if %= Y. With the stated orientation, in Fig. 1.10, PQ, PR, QRare positive, RP, RQ, QP negative. If the orientation were fixed in theopposite way, all these segments would have the opposite sign. Henceif C is between A and B, then CA/CB is negative, whereas if C is notbetween A and B, then CA/CB is positive. From this it becomesclear that division into a given ratio is not a projective invariant, becauseby projection we could change the ratio from a negative quantity to apositive. In particular, mid-point is not a projective invariant.
There is one other point on this subject that will prove useful. -Notethat no point divides AB in the ratio 1, i.e., CA/CB # I for every pointC. Observe that if CA/CB=1, then C is not between A and B. Inthat event, however, CA and CB have different lengths, so certainlyCA/CB # 1. If C is the mid-point of AB, then CA/CB = -1. We alsowant the following theorem, which applies to the so-called real line.
TsxoBEM. Given a segment AB(A e B) and a number r, r 1.
Then there is one and only one point C (on the line AB) such thatCA/CB = r.
raooi. Fix a coordinate system on line AB, i.e., take arbitrarily apoint 0 on that line, and to each point % on the line associate the

III
k.8
off
Pam.;°a
SEC. 9 EXTENSION OF HIGH SCHOOL GEOMETRY 9
number x giving the length OX: x positive, if X is to the right of O ;x negative, if to the left. The number x is called the coordinate of thepoint X. For convenience, let us use a capital letter to indicate apoint, and the same small letter to indicate its coordinate. Then theformula for the distance AB is simply AB = b - a. In algebraic termsthe theorem states that for any number r 0 1, there is one and only onesolution c (C is the unknown) to the equation :
c-a =c-b
r.
To solve this equation, multiply both sides by c - b.
c-a = rc-rbc(1 - r) = a - rb
c = (a-rb)/(1-r).
In this last step we use 1- r 0 0 or 10 r, since division by 0 is excluded.This argument shows that there could be no solution other thanc = (a - rb)/(1- r). To show that it actually is a solution, we trace backfrom the last equality to the first. Getting c(1 - r) = a - rb andc - a = rc - rb is easy enough. Now note that c # b, for if c = b, thenb - a = rb - rb = 0, i.e., b = a and B=A, but we were given that A O B.
So c # b, c - b O 0, we can divide by c - b and get e-bb = r.
9. Desargues' Theorem. In the projection from plane IT to ir', all thepoints that have no image lie on a line. This fact can frequently beused to prove that points are collinear. The general idea is this : if wehave three points A, B, C that we conjecture to be collinear, we arrangea projection so that A, B disappear; we then try to prove that C alsodisappears, and if we can, this proves that A, B, C are collinear.
Here is an example. We say that two triangles ABC, A'B'C' arecentrally perspective if AA', BB', CC' are concurrent (Fig. 1.11a).Two triangles with sides a, b, c and a', b', c', respectively, are said to beaxially perspective if the intersections of the corresponding sides, a a ,
b b', c c', are collinear (Fig. 1.11b). (There are degenerate configura-tions that deserve some attention, i.e., configurations in which thetriangles assume very special positions, say A =A'. What should onethen mean by AA', etc.? We will not enter into these questions at thispoint, but will suppose that the configurations in question are not toospecial.)
THEOREM or DESAROUES. If two triangles are centrally perspective,then they are also axially perspective (see Fig. l.llc).
SID
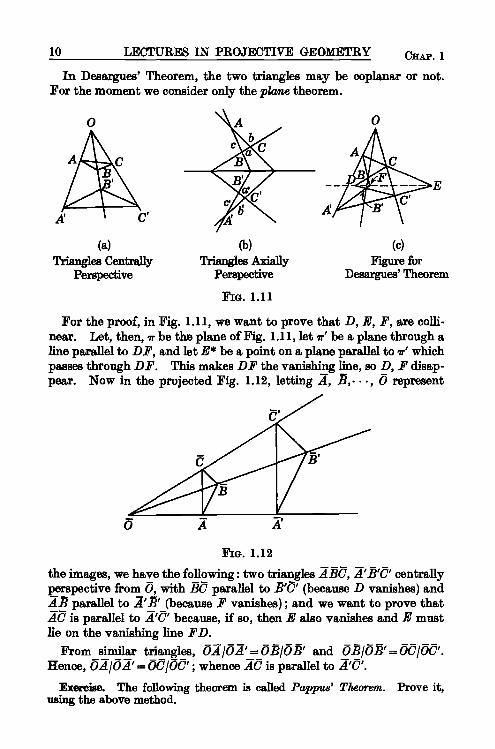
10 LECTURES IN PROJECTIVE GEOMETRY Caar 1In Desargues' Theorem, the two triangles may be coplanar or not.
For the moment we consider only the plane theorem.
(a)
Triangles CentrallyPerspective
(b)Triangles Axially
Perspective
FIa. 1.11
(c)
Figure forDesargues' Theorem
For the proof, in Fig. 1.11, we want to prove that D, E, F, are colli-near. Let, then, it be the plane of Fig. 1.11, let ir' be a plane through aline parallel to DF, and let E* be a point on a plane parallel to ir' whichpasses through DF. This makes DF the vanishing line, so D, F disap-pear. Now in the projected Fig. 1.12, letting j, B, , O represent
Fia. 1.12
the images, we have the following : two triangles ABC, A'B'C' centrallyperspective from O, with BC parallel to B'C' (because D vanishes) andAB parallel to A'B' (because F vanishes) ; and we want to prove thatAC is parallel to A'C' because, if so, then E also vanishes and E mustlie on the vanishing line FD.
From similar triangles, OA/CU'= OB/OB' and OB JOB' = OC/OC'.Hence, 0.9/0j' = OC/OC' ; whence AC is parallel to A'C'.
Exercise. The following theorem is called Pappus' Theorem. Prove it,using the above method.
9,0
SEC. 9 EXTENSION OF HIGH SCHOOL GEOMETRY 11
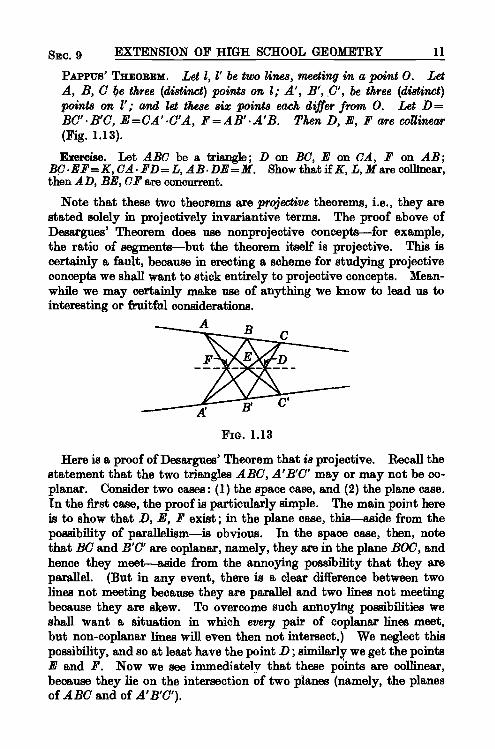
PiPPUS' THEOREM. Let 1, l' be two lanes, meeting in a point O. LetA, B, C be three (distinct) points on 1; A', B', C', be three (distinct)points on 1'; and let these six points each differ from O. Let D=BC' B'C, E =CA' C'A, F = AB' A'B. Then D, E, F are collinear(Fig. 1.13).
Exercise. Let ABC be a triangle; D on BC, E on CA, F on AB;BC EF =K, CA FD= L, AB DE =M. Show that if K, L, Mare collinear,then AD, BE, CF are concurrent.
Note that these two theorems are projective theorems, i.e., they arestated solely in projectively invariantive terms. The proof above ofDesargues' Theorem does use nonprojective concepts-for example,the ratio of segments-but the theorem itself is projective. This iscertainly a fault, because in erecting a scheme for studying projectiveconcepts we shall want to stick entirely to projective concepts. Mean-while we may certainly make use of anything we know to lead us tointeresting or fruitful considerations.
FIG}. 1.13
Here is a proof of Desargues' Theorem that is projective. Recallthestatement that the two triangles ABC, A'B'C' may or may not be co-planar. Consider two cases: (1) the space case, and (2) the plane case.In the first case, the proof is particularly simple. The main point hereis to show that D, E, F exist ; in the plane case, this-aside from thepossibility of parallelism-is obvious. In the space case, then, notethat BC and B'C' are coplanar, namely, they are in the plane BOC, andhence they meet-aside from the annoying possibility that they areparallel. (But in any event, there is a clear difference between twolines not meeting because they are parallel and two lines not meetingbecause they are skew. To overcome such annoying possibilities weshall want a situation in which every pair of coplanar lines meet,but non-coplanar lines will even then not intersect.) We neglect thispossibility, and so at least have the point D ; similarly we get the pointsE and F. Now we see immediately that these points are collinear,because they He on the intersection of two planes (namely, the planesof ABC and of A'B'C').
-m.
pub
mm
.
,,.
cam !?
y1
.n°
h°,o
Q3.
III
4.,Rio
III
a'$q0°
0.1'F'
>'v
12 LECTURES IN PROJECTIVE GEOMETRY CHAP. 1
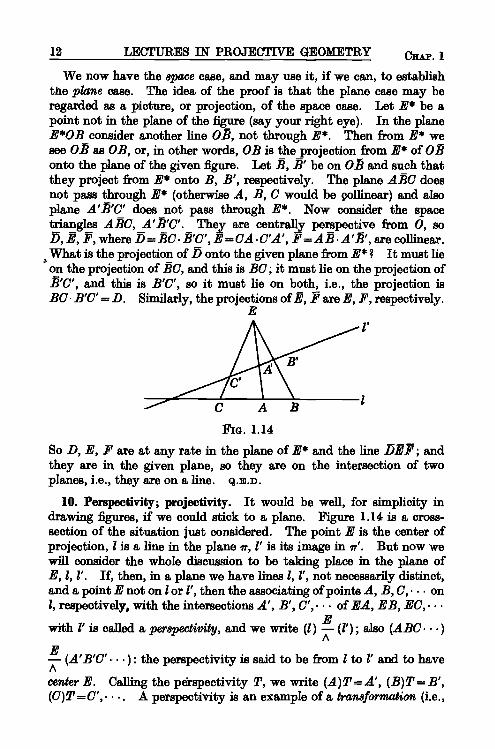
We now have the space case, and may use it, if we can, to establishthe plane case. The idea of the proof is that the plane case may beregarded as a picture, or projection, of the space case. Let E* be apoint not in the plane of the figure (say your right eye). In the planeE*OB consider another line OB, not through E*. Then from E* wesee OB as OB, or, in other words, OB is the projection from E* of OBonto the plane of the given figure. Let B, B' be on OB and such thatthey project from E* onto B, B', respectively. The plane ABC doesnot pass through E* (otherwise A, B, C would be collinear) and alsoplane A'B'C' does not pass through E*. Now consider the spacetriangles ABC, A'B'C'. They are centrally perspective from 0, soD, E, F, where are collinear.What is the projection of D onto the given plane from E* ? It must lieon the projection of BC, and this is BC; it must lie on the projection ofB'C', and this is B'C', so it must lie on both, i.e., the projection isBC-B'C'=D. Similarly, the projections of E, F are E, F, respectively.
E
FIG. 1.14
So D, E, F are at any rate in the plane of E* and the line DR P; andthey are in the given plane, so they are on the intersection of twoplanes, i.e., they are on a line. Q.E.D.
10. Perspectivity; projectivity. It would be well, for simplicity indrawing figures, if we could stick to a plane. Figure 1.14 is a cross-section of the situation just considered. The point E is the center ofprojection, l is a line in the plane s, l' is its image in a'. But now wewill consider the whole discussion to be taking place in the plane ofE, 1, 1'. If, then, in a plane we have lines 1, 1', not necessarily distinct,and a point E not on 1 or 1', then the associating of points A, B, C, on1, respectively, with the intersections A', B', C', of EA, EB, EC,
with 1' is called a perspectivity, and we write (1) E (l'); also (ABC... )
E (A'B'C' . ) : the perspectivity is said to be from l to l' and to have
center E. Calling the perspectivity T, we write (A)T=A', (B)T=B',(C)T =C', . A perspectivity is an example of a transformation (i.e.,
ohm
Sao. 10 EXTENSION OF HIGH SCHOOL GEOMETRY 13
a method of passing from certain points A, B, C, to other pointsA', B', C', ; a rotation is a transformation ; so is reflection in a line),and for a transformation to be perspectivity, it must be of the specialcharacter just described.
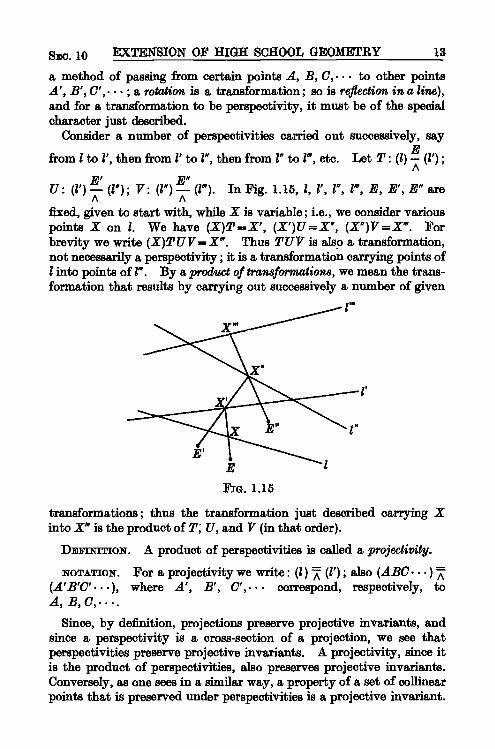
Consider a number of perspectivities carried out successively, say
from I to 1', then from l' to 1", then from l" to l', etc. Let T : (1) E (I');
U : (l') - (d") ; V : (l")E"
(l""). In Fig. 1.15, 1, 1', l", I-, E, E', E" are
fixed, given to start with, while X is variable ; i.e., we consider variouspoints X on 1. We have (X)T=X', (X')U=X', (X")V=%'". Forbrevity we write (X )T UV = %'". Thus T UV is also a transformation,not necessarily a perspectivity ; it is a transformation carrying points ofl into points of l'". By a product of traneformation8, we mean the trans-formation that results by carrying out successively a number of given
transformations; thus the transformation just described carrying Xinto %' is the product of T; U, and V (in that order).
DEFINITION. A product of perspectivities is called a projectivity.
NOTATION. For a projectivity we write : (1) = (I'); also (ABC.. .) n(A'B'C'. . ), where A', B', C', correspond, respectively, toA, B, C, .
Since, by definition, projections preserve projective invariants, andsince a perspectivity is a cross-section of a projection, we see thatperspectivities preserve projective invariants. A projectivity, since itis the product of perspectivities, also preserves projective invariants.Conversely, as one sees in a similar way, a property of a set of collinearpoints that is preserved under perspectivities is a projective invariant.
o'1
,0U
'0^
f",
111qua
14 LECTURES IN PROJECTIVE GEOMETRY CHAP I
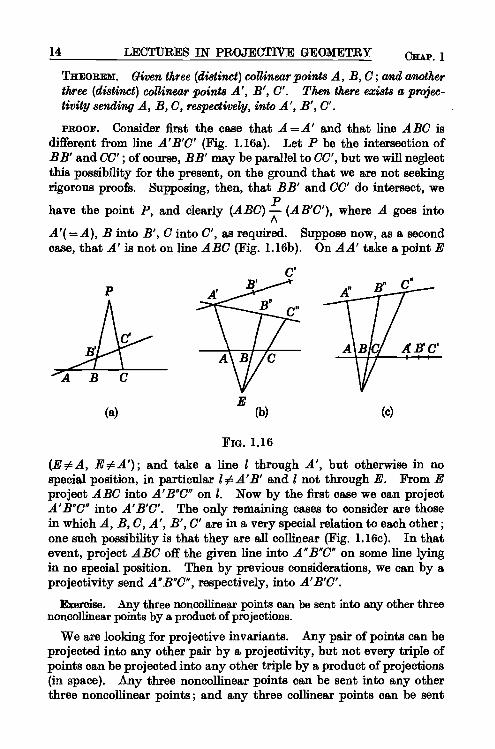
TEnoREM. Given three (distinct) collinear points A, B, C; and anotherthree (distinct) collinear points A', B', C'. Then there exists a projec-tivity sending A, B, C, respectively, into A', B', C'.
PRooF. Consider first the case that A= A' and that line ABC isdifferent from line A'B'C' (Fig. 1.16a). Let P be the intersection ofBB' and CC' ; of course, BB' may be parallel to CC', but we will neglectthis possibility for the present, on the ground that we are not seekingrigorous proofs. Supposing, then, that BB' and CC' do intersect, we
have the point P, and clearly (ABC) P (AB'C'), where A goes into
A'(=A), B into B', C into C', as required. Suppose now, as a secondcase, that A' is not on line ABC (Fig. 1.16b). On AA' take a point E
C,
L
1 B AB'C'
(a)E
FIG. 1.16
(b) (c)
(BOA, E O A') ; and take a line l through A', but otherwise in nospecial position, in particular 10 A'B' and l not through E. From Eproject ABC into A'B"C" on 1. Now by the first case we can projectA'B"C" into A'B'C'. The only remaining cases to consider are thosein which A, B, C, A', B', C' are in a very special relation to each other ;one such possibility is that they are all collinear (Fig. 1.16c). In thatevent, project ABC off the given line into A"B"C" on some line lyingin no special position. Then by previous considerations, we can by aprojectivity send A"B"C", respectively, into A'B'C'.
Exercise. Any three noncollinear points can be sent into any other threenoncollinear points by a product of projections.
We are looking for projective invariants. Any pair of points can beprojected into any other pair by a projectivity, but not every triple ofpoints can be projected into any other triple by a product of projections(in space). Any three noncollinear points can be sent into any otherthree noncollinear points; and any three collinear points can be sent
III
n.,
'B'
aim
yam
AD
''y'
c°)
m+
'
°1D
Sac. 11 EXTENSION OF HIGH SCHOOL GEOMETRY 15
into any other three. But collinearity is a projective invariant, and soprojectively we can distinguish the one kind of triple from the other.Considering now the collinear triples, we see that there is no way pro-jectively to distinguish one triple from another. In ordinary geometry,to make an analogy, one studies the so-called rigid motions, i.e., thetransformations in the plane which are such that if A, B are sent intoA', B' then distance AB =distance A'B' (for all pairs A, B). In suchgeometry, one counts two figures as equivalent if one can be transformedinto the other by a rigid motion : and it is clear that no general assertioncan be made of the first figure that cannot be made of the second, andvice versa ; the two figures are equivalent under the study in question.Similarly in projective geometry, any three collinear points are equiva-lent to any other three collinear points.
The next question to ask is whether any four collinear points are pro-jectively equivalent to any other four. We shall see that the answeris No.
C.
A=A F=F' B=B'(b)
FIG. 1.17
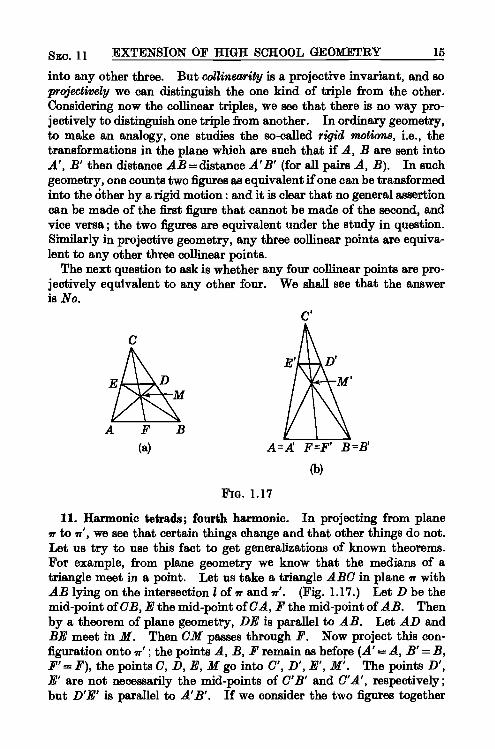
11. Harmonic tetrads; fourth harmonic. In projecting from planeIT to iT', we see that certain things change and that other things do not.Let us try to use this fact to get generalizations of known theorems.For example, from plane geometry we know that the medians of atriangle meet in a point. Let us take a triangle ABC in plane a withAB lying on the intersection l of Tr and nr'. (Fig. 1.17.) Let D be themid-point of CB, E the mid-point of CA, F the mid-point of AB. Thenby a theorem of plane geometry, DE is parallel to AB. Let AD andBE meet in M. Then CM passes through F. Now project this con-figuration onto 1T'; the points A, B, F remain as before (A'= A, B'= B,P= F), the points C, D, E, M go into C', D', E', M'. The points D',E' are not necessarily the mid-points of C'B' and C'A', respectively;but D'E' is parallel to A'B'. If we consider the two figures together
`'m
...
°+m
9,m
SAW
a+'
,IIIcam
ac"
IoW
ate'
adsz."
16 LECTURES IN PROJECTIVE GEOMETRY Caep I
we begin to suspect that the fact that CM bisects AB (where M=BEintersected with AD-let us write this : K=BE-AD) does not dependso much on the fact that D, E are mid-points of CB, CA, but only onthe fact that ED is parallel to AB; because in the second figure C'M'bisects A'B', although E', D' are not mid-points of the correspondingsides. We are thus led to conjecture the following theorem.
THEOBEM. If a line parallel to the base AB of a triangle ABC cutsthe sides CB, CA in D, E, respectively, and M =BE -AD, then CMpasses through the mid point of AB.
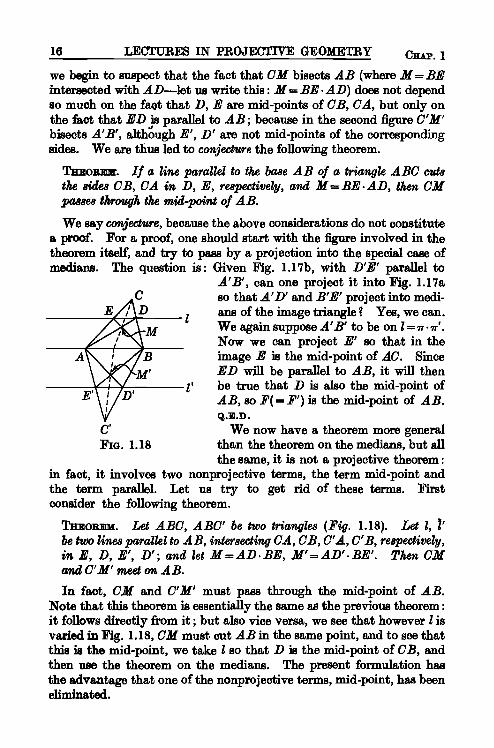
We say conjecture, because the above considerations do not constitutea proof. For a proof, one should start with the figure involved in thetheorem itself, and try to pass by a projection into the special case ofmedians. The question is : Given Fig. 1.17b, with D'E' parallel to
A'B', can one project it into Fig. 1.17aC so that A'D' and B'E' project into medi-
C'Fin. 1.18
ans of the image triangle ? Yes, we can.We again suppose A'B' to be on l = a - ar'.Now we can project E' so that in theimage E is the mid-point of AC. SinceED will be parallel to AB, it will thenbe true that D is also the mid-point ofAB, so F(= F) is the mid-point of AB.Q.E.D.
We now have a theorem more generalthan the theorem on the medians, but allthe same, it is not a projective theorem :
in fact, it involves two nonprojective terms, the term mid-point andthe term parallel. Let us try to get rid of these terms. Firstconsider the following theorem.
THEOREM. Let ABC, ABC' be two triangles (Fig. 1.18). Let 1, l'be two lines parallel to AB, intersecting CA, CB, C'A, C'B, respectively,in E, D, E', D'; and let M=AD-BE, M'=AY-BE'. Then CMand C'M' meet on AB.
In fact, CM and C'M' must pass through the mid-point of AB.Note that this theorem is essentially the same as the previous theorem :it follows directly from it ; but also vice versa, we see that however l isvaried in Fig. 1.18, CM must cut AB in the same point, and to see thatthis is the mid-point, we take 1 so that D is the mid-point of CB, andthen use the theorem on the medians. The present formulation hasthe advantage that one of the nonprojective terms, mid-point, has beeneliminated.
SEC. 11 EXTENSION OF HIGH SCHOOL GEOMETRY 17
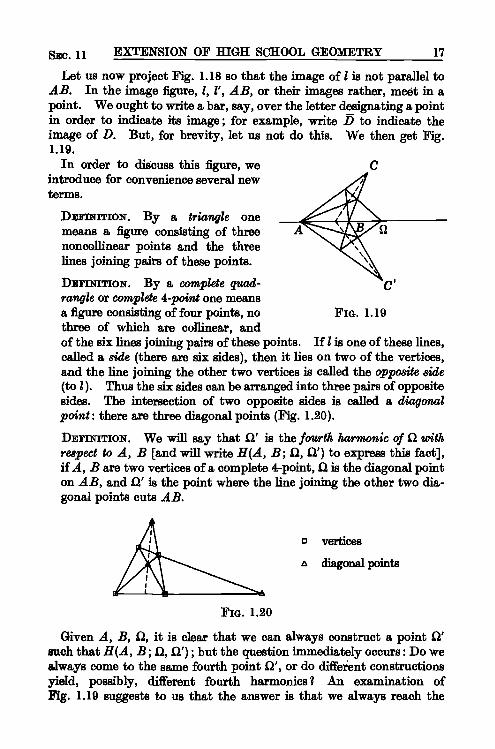
Let us now project Fig. 1.18 so that the image of l is not parallel toAB. In the image figure, 1, l', AB, or their images rather, meet in apoint. We ought to write a bar, say, over the letter designating a pointin order to indicate its image ; for example, write D to indicate theimage of D. But, for brevity, let us not do this. We then get Fig.1.19.
In order to discuss this figure, weintroduce for convenience several newterms.
DEFINITION. By a triangle onemeans a figure consisting of threenoncollinear points and the threelines joining pairs of these points.
C
DEFINITION. By a complete quad- _C'rangle or complete 4-point one meansa figure consisting of four points, nothree of which are collinear, and
FIG. 1.19
of the six lines joining pairs of these points. If l is one of these lines,called a side (there are six sides), then it lies on two of the vertices,and the line joining the other two vertices is called the apposite side(to 1). Thus the six sides can be arranged into three pairs of oppositesides. The intersection of two opposite sides is called a diagonalpoint : there are three diagonal points (Fig. 1.20).
DEFINITION. We will say that if is the fourth harmonic of b2 withrespect to A, B [and will write H(A, B; L1, Q') to express this fact],if A, B are two vertices of a complete 4-point, Sl is the diagonal pointon AB, and if is the point where the line joining the other two dia-gonal points cuts AB.
FIG. 1.20
o vertices
n diagonal points
Given A, B, Q, it is clear that we can always construct a point ifsuch that H(A, B ; S2, il') ; but the question immediately occurs : Do wealways come to the same fourth point if, or do different constructionsyield, possibly, different fourth harmonics? An examination ofFig. 1.19 suggests to us that the answer is that we always reach the
'-;
18 LECTURES IN PROJECTIVE GEOMETRY CHAP. 1
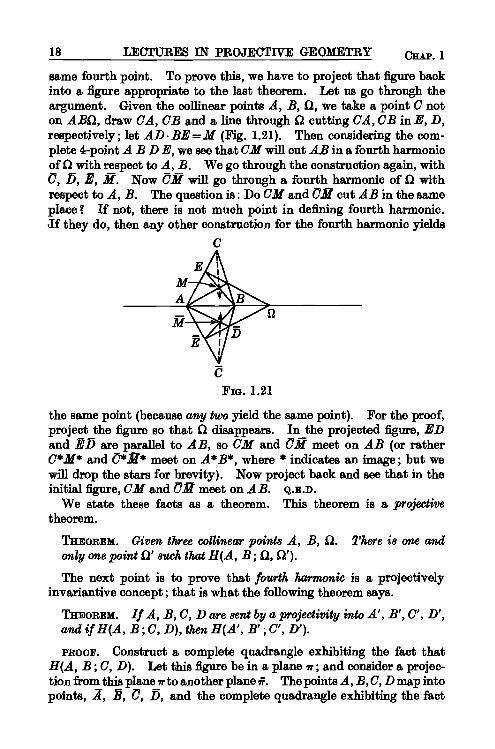
same fourth point. To prove this, we have to project that figure backinto a figure appropriate to the last theorem. Let us go through theargument. Given the collinear points A, B, f2, we take a point C noton ABS2, draw CA, CB and a line through S2 cutting CA, CB in E, D,respectively ; let AD BE = M (Fig. 1.21). Then considering the com-plete 4-point A B D E, we see that CM will cut AB in a fourth harmonicof 0 with respect to A, B. We go through the construction again, withC, D, E, M. Now CM will go through a fourth harmonic of S2 withrespect to A, B. The question is : Do CM and CM cut AB in the sameplace? If not, there is not much point in defining fourth harmonic.,If they do, then any other construction for the fourth harmonic yields
C
C
Fia. 1.21
the same point (because any two yield the same point). For the proof,project the figure so that Q disappears. In the projected figure, EDand ED are parallel to AB, so CM and CM meet on AB (or ratherC*M* and C*M* meet on A *B*, where * indicates an image; but wewill drop the stars for brevity). Now project back and see that in theinitial figure, CM and CM meet on AB. Q.E.D.
We state these facts as a theorem. This theorem is a projectivetheorem.
TaEonEns. Given three collinear points A, B, Q. There is one andonly one point S2' such that H(A, B; 0, S2').
The next point is to prove that fourth harmonic is a projectivelyinvariantive concept; that is what the following theorem says.
TaEOREM. If A, B, C, D are sent by a projectivity into A', B', C', D',and if H(A, B ; C, D), then H(A', B' ; C', D').
PROOF. Construct a complete quadrangle exhibiting the fact thatH(A, B ; C, D). Let this figure be in a plane i ; and consider a projec-tion from this plane it to another plane fr. The points A, B, C, D map intopoints, j, 2, C, D, and the complete quadrangle exhibiting the fact
.-m
mob
0.1
AA
Ap~5
Leo
Pi,
0.,o
k4-
Sxo. 11 EXTENSION OF HIGH SCHOOL GEOMETRY 19
that H(A, B; C, D) maps into a complete quadrangle showing thatH(A, B ; C, D). We have proved that a harmonic tetrad maps under aprojection into a 'harmonic tetrad. Any perspectivity can be regardedas a cross-section of a projection (see §10, first paragraph) ; thereforeunder a perspectivity, a harmonic tetrad goes into a harmonic tetrad.A similar conclusion for a projectivity, i.e., a product of perspectivities,is immediate.
COROLLARY. There exist projectivety nonequivalent collinear tetrads,i.e., there exist collinear points A, B, C, D and collinear points A', B',C', D' such that A, B, C, D cannot be sent into A', B', C', D' by aprojectivity.PROOF. Take A, B, C, D such that H(A, B; C, D). Now take
collinear points A', B', C', X, D' such that H(A', B'; C', X) and suchthat D'96 X. By the uniqueness of the fourth harmonic we know, then,that H(A', B'; C', D') is not the case. Then A, B, C, D cannot by aprojectivity be sent into A', B', C', D'.
Exercise. Let ABA'B' be a complete quadrangle; letbe the diagonal points; and let
D= PQ .AB. We have H(A, B ; B, D) and ABBD P A'B'RD'. Hence bythe preceding theorem we also have H(A', B'; R, D'). Draw this same con-clusion directly from the figure, rather than by the above theorem. Alsowithout using that theorem show that H(P, Q; D', D).
Here is another proof that, under a projectivity, harmonic tetrads gointo harmonic tetrads. This proof uses only the plane, not space.Later on, when we set up our axioms, these will be for plane geometry,partly to simplify the drawing of pictures. Many of the things we sayin this part of the book will carry over to the second part. The follow-ing proof, for example, will carry over immediately ; the first proof notat all or, at any rate, not immediately.
Now we come to the proof. We have to prove (ABCD) = (A'B'C'D')and H(A, B; C, D) imply H(A', B'; C', D'). Instead of a projectivity,it is sufficient to consider a single perspectivity. Suppose then that
(ABCD) P (A'B'C'D') ; say this perspectivity is from l to 1': (1) P (l').
The lines l and l' may be in some very special position, for example 1'might be passing through A. Let us introduce a third line 1, and con-
sider (1) P (1) P (1'), where 1 is in some general position. It is then
sufficient to consider the perspectivities l P (1) and (1) P (1') ; and, in
fact, we only have to consider one of them, the considerations for the
+D
'20 LECTURES IN PROJECTIVE GEOMETRY CHAP 1
other being quite the same. So far the considerations have beenlargely preparatory : we need consider only a single perspectivity
(l) P (l'), and may further suppose that l and l' lie in no special relation
to the points A, , D' (Fig. 1.22). Consider the line CD', and letAi = CD' AA', Bi =CD' BB'. By the exercise on page 19,H(A, B; C, D) implies H(Ai, Bi ; C, D'), and this, in turn, by the sameexercise implies H(A,' B'; C', D'). Q.E.D.
12. Further theorems on harmonic tetrads.
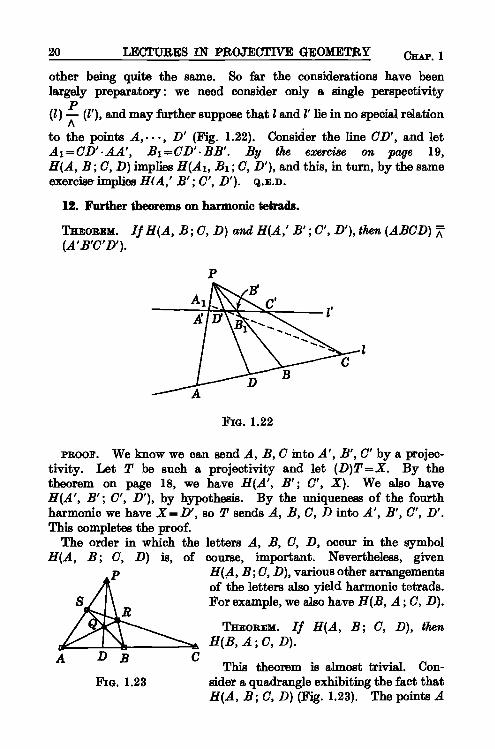
THEOREM. If H(A, B ; C, D) and H(A,' B'; C', D'), then (ABCD)(A'B'C'D').
FIG. 1.22
PROOF. We know we can send A, B, C into A', B', C' by a projec-tivity. Let T be such a projectivity and let (D)T=X. By thetheorem on page 18, we have H(A', B'; C', %). We also haveH(A', B'; C', D'), by hypothesis. By the uniqueness of the fourthharmonic we have X = D', so T sends A, B, C, D into A', B', C', Y.This completes the proof.
The order in which theH(A, B ; C, D) is, of
FIG. 1.23
letters A, B, C, D, occur in the symbolcourse, important. Nevertheless, givenH(A, B; C, D), various other arrangementsof the letters also yield harmonic tetrads.For example, we also have H(B, A ; C, D).
THEOREM. If H(A, B; C, D), thenH(B, A ; C, D).
This theorem is almost trivial. Con-sider a quadrangle exhibiting the fact thatH(A, B ; C, D) (Fig. 1.23). The points A
R.,
min
ono
GS'
cep.G
1
oar
C4+
m~
'chi
d00
0.`
Eli
Sac. 13 EXTENSION OF HIGH SCHOOL GEOMETRY 21
and B are vertices of this quadrilateral. But so are B and A and there-fore the same quadrangle shows that H(B, A; C, D).
Just a little less trivial is the following.
THEOREM. If H(A, B ; C, D), then H(A, B ; D, C).
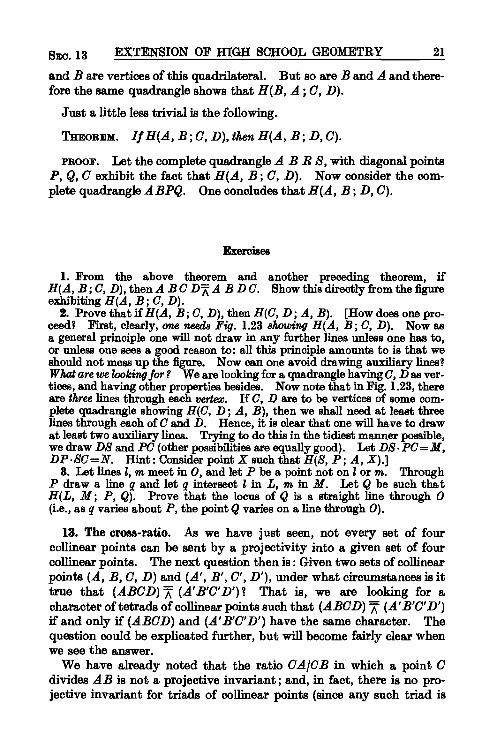
PROOF. Let the complete quadrangle A B R S, with diagonal pointsP, Q, C exhibit the fact that H(A, B ; C, D). Now consider the com-plete quadrangle ABPQ. One concludes that H(A, B ; D, C).
Exercises
1. From the above theorem and another preceding theorem, ifH(A, B ; C, D), then A B C D n A B D C. Show this directly from the figureexhibiting H(A, B ; C, D).
2. Prove that if H(A, B ; C, D), then H(C, D ; A, B). [How does one pro-ceed? First, clearly, one needs Fig. 1.23 showing H(A, B; C, D). Now asa general principle one will not draw in any further lines unless one has to,or unless one sees a good reason to: all this principle amounts to is that weshould not mess up the figure. Now can one avoid drawing auxiliary lines?What are we looking for ? We are looking for a quadrangle having C, D as ver-tices, and having other properties besides. Now note that in Fig. 1.23, thereare three lines through each vertex. If C, I? are to be vertices of some com-plete quadrangle showing H(C, D ; A, B), then we shall need at least threelines through each of C and D. Hence, it is clear that one will have to drawat least two auxiliary lines. Trying to do this in the tidiest manner possible,we draw DS and PC (other possibilities are equally good). Let DS PC=M,DP-SC=N. Hint : Consider point X such that H(S, P ; A, X).]
3. Let lines 1, m meet in 0, and let P be a point not on l or m. ThroughP draw a line q and let q intersect l in L, m in M. Let Q be such thatH(L, M; P, Q). Prove that the locus of Q is a straight line through 0(i.e., as q varies about P, the point Q varies on a line through 0).
13. The cross-ratio. As we have just seen, not every set of fourcollinear points can be sent by a projectivity into a given set of fourcollinear points. The next question then is : Given two sets of collinearpoints (A, B, C, D) and (A', B', C', D'), under what circumstances is ittrue that (ABCD) = (A'B'C'D')? That is, we are looking for acharacter of tetrads of collinear points such that (ABCD) ` (A'B'C'D')if and only if (ABCD) and (A'B'C'D') have the same character. Thequestion could be explicated further, but will become fairly clear whenwe see the answer.
We have already noted that the ratio CA/CB in which a point Cdivides AB is not a projective invariant; and, in fact, there is no pro-jective invariant for triads of collinear points (since any such triad is
atom
Gay
22 LECTURES IN PROJECTIVE GEOMETRY QffAF. I
projectively equivalent to any other). For four collinear points A,B,C,D, let us now consider the number
CA/CBDA/DB
This number is called the cross-ratio of C, D with respect to A, B andis written R(A, B; C, D). We shall see that two collinear tetrads(A, B, C, D), (A', B', C', D') are projectively equivalent, i.e., (ABCD)(A'B'C'D'), if and only if B(A, B; C, D) = R(A', B'; C', D').
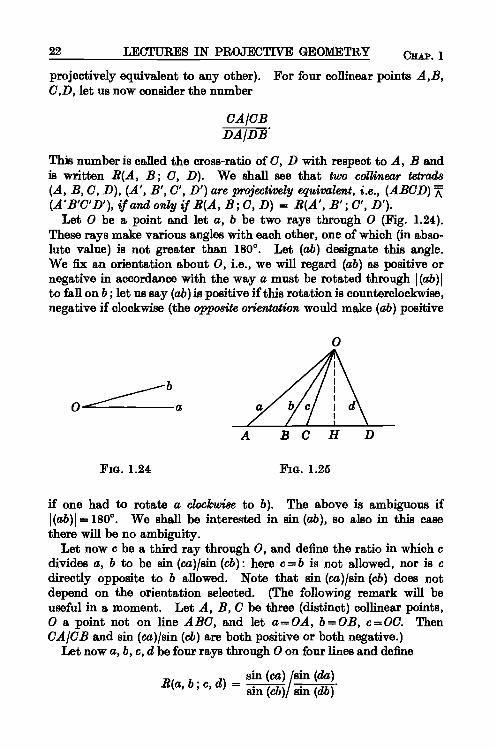
Let 0 be a point and let a, b be two rays through 0 (Fig. 1.24).These rays make various angles with each other, one of which (in abso-lute value) is not greater than 180°. Let (ab) designate this angle.We fix an orientation about 0, i.e., we will regard (ab) as positive ornegative in accordance with the way a must be rotated through I (ab)to fall on b ; let us say (ab) is positive if this rotation is counterclockwise,negative if clockwise (the opposite orientation would make (ab) positive
b
O a
Fm. 1.24 FIG. 1.25
if one had to rotate a clockwise to b). The above is ambiguous ifI (ab) I =180°. We shall be interested in sin (ab), so also in this casethere will be no ambiguity.
Let now c be a third ray through 0, and define the ratio in which cdivides a, b to be sin (ca)/sin (cb): here c=b is not allowed, nor is cdirectly opposite to b allowed. Note that sin (ca)/sin (cb) does notdepend on the orientation selected. (The following remark will beuseful in a moment. Let A, B, C be three (distinct) collinear points,0 a point not on line ABC, and let a = OA, b = OB, c=00. ThenCA/CB and sin (ca)/sin (cb) are both positive or both negative.)
Let now a, b, c, d be four rays through 0 on four lines and define
R(a, b ; c, d) =sin (ca) /sin (da)sin (cb)/sin (db)
>11
07i
coo
coo
.acs
a°,
aid
'.'
ESA
p.,
GL
,...
SEC. 13 EXTENSION OF HIGH SCHOOL GEOMETRY 23
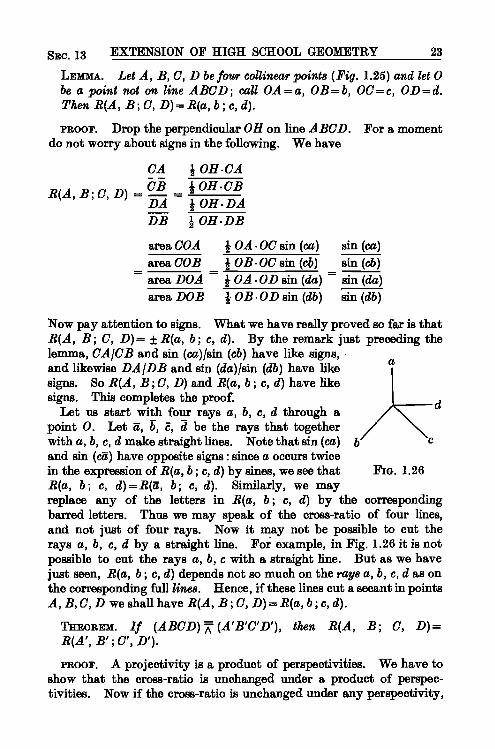
LEMMA. Let A, B, C, D be four collinear points (Fig. 1.25) and let 0be a point not on line ABCD ; call OA = a, OB = b, OC = c, OD = d.Then R(A, B ; C, D) = R(a, b ; c, d).
PROOF. Drop the perpendicular OH on line ABCD. For a momentdo not worry about signs in the following. We have
CA 4 OH -CA
R(A, B ; C, D) = CB _ 4 OH CBDA
4area 4 OC sin sin (cb)
area DOA 4 OA OD sin (da) - sin (da)area DOB 4 OB OD sin (db) sin (db)
Now pay attention to signs. What we have really proved so far is thatR(A, B; C, D) = ± R(a, b; c, d). By the remark just preceding thelemma, CA/CB and sin (ca)/sin (cb) have like signs,and likewise DA/DB and sin (da)/sin (db) have likesigns. So R(A, B ; C, D) and R(a, b ; c, d) have like
a
signs. This completes the proof. dLet us start with four rays a, b, c, d through a
point 0. Let a, b, c, d be the rays that togetherwith a, b, c, d make straight lines. Note that sin (ca)and sin (ca) have opposite signs : since a occurs twicein the expression of R(a, b ; c, d) by sines, we see that FIG. 1.26R(a, b ; c, d) = R(a, b; c, d). Similarly, we mayreplace any of the letters in R(a, b ; c, d) by the correspondingbarred letters. Thus we may speak of the cross-ratio of four lines,and not just of four rays. Now it may not be possible to cut therays a, b, c, d by a straight line. For example, in Fig. 1.26 it is notpossible to cut the rays a, b, c with a straight line. But as we havejust seen, R(a, b ; c, d) depends not so much on the rays a, b, c, d as onthe corresponding full lines. Hence, if these lines cut a secant in pointsA, B, C, D we shall have R(A, B ; C, D) = R(a, b ; c, d).
THEOREM. If (ABCD) A (A'B'C'D'), then R(A, B; C, D)R(A', B'; C', D').
PROOF. A projectivity is a product of perspectivifies. We have toshow that the cross-ratio is unchanged under a product of perspec-tivities. Now if the cross-ratio is unchanged under any perspectivity,
F..
Quo
24 LECTURES IN PROJECTIVE GEOMETRY CEeP. 1
then obviously it will also be unchanged under a product of perspecti-vities. In short, it is sufficient to consider a perspectivity instead of a
projectivity. Let then (ABCD) 0 (A'B'C'D') (Fig. 1.27). By the
lemma, R(A, B ; C, D) = R(a, b ; c, d) = R(A', B'; C', D'). Q.E.D.Conversely, i8 2t true that R(A, B; C, D)=R(A', B'; C', D') implies
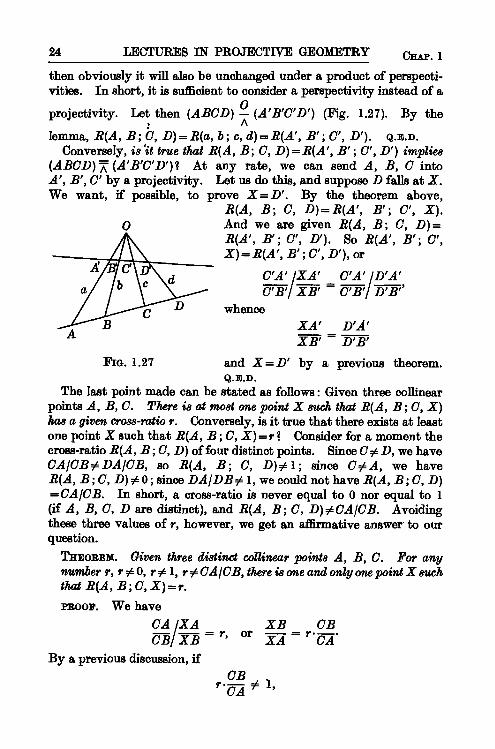
(ABCD) A (A'B'C'D')? At any rate, we can send A, B, C intoA', B', C' by a projectivity. Let us do this, and suppose D falls at X.We want, if possible, to prove X=D'. By the theorem above,
0
FIG. 1.27
R(A, B; C, D)=R(A', B'; C', X).And we are given R(A, B; C, D) =R(A', B'; C', D'). So R(A', B'; C',X)=R(A', B'; C', D'), or
C'A' XA' _ C'A' D'A'C'B'%B' C'B'/T'B''
whenceXA' _ D'A'%B' D'B'
and X=D' by a previous theorem.Q.E.D.
The last point made can be stated as follows : Given three collinearpoints A, B, C. There is at most one point X such that R(A, B ; C, X)has a given cross-ratio r. Conversely, is it true that there exists at leastone point X such that R(A, B ; C, X)=r? Consider for a moment thecross-ratio B(A, B ; C, D) of four distinct points. Since C 96 D, we haveCA/CB O DA/CB, so R(A, B ; C, D) 1; since C A, we haveR(A, B ; C, D) # 0 ; since DA/DB 1, we could not have R(A, B ; C, D)=CA/CB. In short, a cross-ratio is never equal to 0 nor equal to 1(if A, B, C, D are distinct), and R(A, B ; C, D) o CA/CB. Avoidingthese three values of r, however, we get an affirmative answer' to ourquestion.
THEOREM. Given three distinct collinear points A, B, C. For anynumber r, r 0 0, r 01, r CA/CB, there is one and only one point X suchthat B(A, B ; C, X) = r.
YRooF. We haveCA XA XB CBCB/%B = r, or XA = r-
CABy a previous discussion, if
rCA#1'
p''
'!1
10k
why
`d~
mph
`d"
......
gyp,
SEC. 14 EXTENSION OF HIGH SCHOOL GEOMETRY 25
there is one and only one such point X. Since rCA/CB, alsor CB/CA 0 1, and our one and only X exists.
14. Fundamental theorem of projective geometry. Given three(distinct) collinear points A, B, C and three (distinct) collinear pointsA', B', C'. We know that there exists at least one projectivity sendingA, B, C, respectively, into A', B', C'. Can there be more than one? LetT, U be projectivities sending A, B, C, respectively, into A', B', C'.We write (A)T=A', (B)T=B', (C)T=C', and similarly (A)U=A',(B)U=B', (C)U=C'. Now let us be quite clear as to what is meantby T # U or T = U. The projectivities T and U are products of per-spectivities. In saying T = U or T 0 U, we do not have regardfor the way T and U are composed of perspectivities, but onlyhave regard for the effects that T and U have upon the points ofline ABC, i.e., T= U if (X)T= (X) U for every point on line ABC.And to say that T U is to say that for at least one point X on lineABC we have (X)T # (X)U.
FUNDAMENTAL THEOREM. There is one and only one prajectivitysending three given collinear points A, B, C, respectively, into three givencollinear points A', B', C'.
(The "one" we already have : it is the "only one" that is the importantpoint.)
PR.oor. Let T, U be projectivities sending A, B, C, respectively,into A', B', C'. To prove : T = U. Let X be any point on line A B C(XA,XOB,XC). ThenR(A,B;C,X)=R(A',B';C',(X)T);andB(A, B; C, X)=R(A', B'; C',(X)U). Thus R(A', B'; C',(X)T)=B(A', B'; C', (X) U), whence (X )T = (X) U and T= U. Q.E.D.
Note the following fact about the Fundamental Theorem : it is statedin projective terms (i.e., later, in building up projective geometry, weare going to retain the concepts "points," "line," "perspectivity," and"projectivity"). It is true that the proof has made use of nonprojectiveterms (namely "distance"), but the theorem is itself in suitable termsfor a strictly projective study.
Earlier we gave an exercise to prove Pappus' Theorem. Theproof involved distances, and so was not projective in nature. Weshall show how to prove Pappus' Theorem using the FundamentalTheorem ; but first we prove the following consequence of the Funda-mental Theorem.
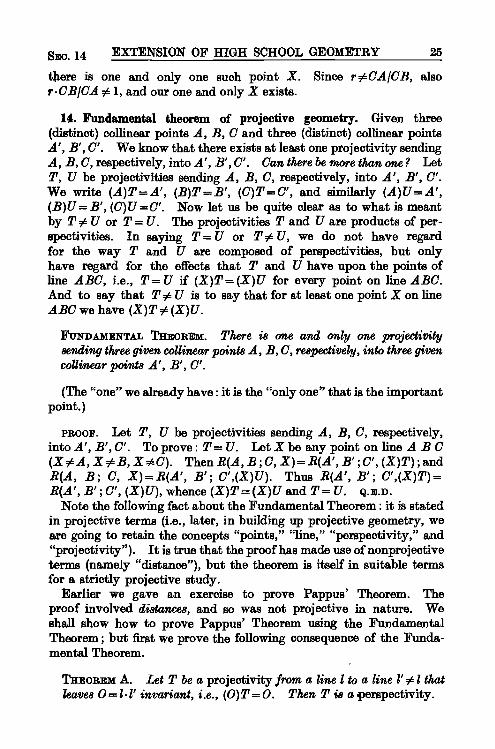
THEOREM A. Let T be a projectivity from a line I to a line 1'9& 1 thatleaves O= I. I' invariant, i.e., (O)T = O. Then T is a Perspectivity.
oil
rayO
-¢'
cow
o."
H'S
°'°
mph
'''
26 LECTURES I N PROJECTIVE GEOMETRY NAP. i
PROOF. Take two points A, B on i (Fig. 1.28). Let A' = (A)T,
B'=(B)T. Let E = AA' . BB'. Let U be the perspectivity l E if.
Then (O) U = 0, (A) U = A', (B) U = B'; therefore T and U have the same
Eeffects on three distinct points. Bythe Fundamental Theorem, T = U,so T is a perspectivity.
This last theorem suggests amethod that frequently can beapplied to prove three points D, E,F collinear Su ose one has app.
B -A
FIG}. 1.28geometric situation in which onesuspects that three of the pointsD, E, F are collinear. Consider
two of them, say D and F. First see whether there is anyprojectivity, from a line l to a line 1', sending D into F. Second, ifone has found such a projectivity, check to see whether it leavesl l' invariant. If it does, then it is a perspectivity. Supposing it is,compute its center, hoping that it will be E. If it is, then D, E, Fare collinear, since the join of the corresponding points D, F must gothrough the center. However, all this is very general ; let us see if itcan be applied to prove Pappus' Theorem.
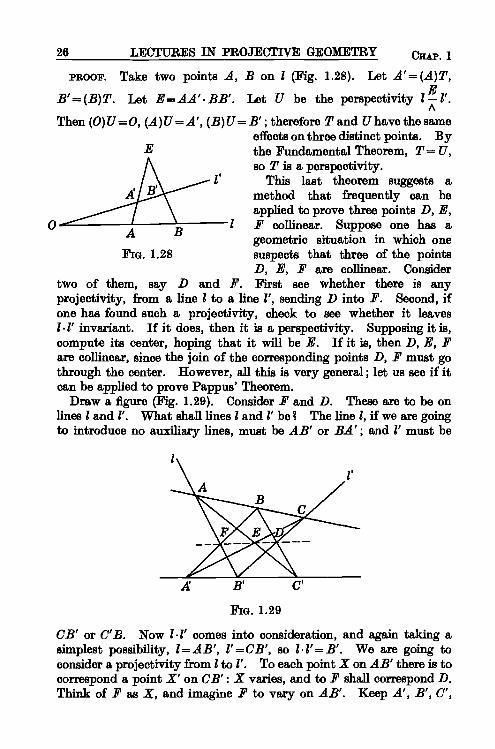
Draw a figure (Fig. 1.29). Consider F and D. These are to be onlines l and 1'. What shall lines l and l' be ? The line 1, if we are goingto introduce no auxiliary lines, must be AB' or BA'; and 1' must be
FIG. 1.29
CB' or C'B. Now 1.1' comes into consideration, and again taking asimplest possibility, l = AB', 1'=CB', so l l' = B'. We are going toconsider a projectivity from I to 1'. To each point % on AB' there is tocorrespond a point X' on CB': % varies, and to F shall correspond D.Think of F as $, and imagine F to vary on AB'. Keep A', B', C',
9Z.!
'm
op°O
`.a
t.{.
''!C
S'
off
w+
,!+
-4r`
o7.
"°"
tipR
.,o.50
A.,
;'0a
a3',
`off
p.,
ca.
Sxo. 15 EXTENSION OF HIGH SCHOOL GEOMETRY 27
A, C fixed, and vary F ? What happens? B varies on AC and D varieson B'C. The variation in F causes a variation in D. How? Via B.Now F -- B is a perspectivity from l to m (= AC), with center A'.And B -- D is a perspectivity from m to 1', with center C'. The pro-duct of these two perspectivities sends F into D. So, first, we see aprojectivity sending F into D. Second, is the projectivity a perspecti-vity? We must examine B'. What happens to B' under the per-
,
apectivity (l) n4(m) ? Well, B'--> W = AB A'B'. And what happens01
(1') ? We have W -- B'. So ourto W under the perspectivity (m) ^
projectivity sends B' into B', hence is a perspectivity. Third, what isthe center of this perspectivity ? Compute it. The center must lie onlines joining corresponding points. Of course, F and D correspond,but let us save this information. Try another point on 1. The pointA looks promising. What happens to A ? Well, A - A -+'S =AC'. B'C. Therefore the center must be on AS, which is AC'. Thisfits in with the hope that E is the center. We need another pair ofcorresponding points, and the line joining them, we hope, passesthrough E. A'C is a line through E; let it cut AB' in B. If to Bcorresponds C, then BC passes through the center. Does B go into C?Yes : B C --- C. So BC AS = E is the center. F --* B --+ D, soFD passes through the center ; F, B, D are collinear. Q.E.D.
Exercise. Prove Desargues' Theorem using the Fundamental Theorem.
15. Further remarks on the cross-ratio. Let A, B, C, D be four(distinct) collinear points. The cross-ratio of four points depends uponthe order in which they are taken; for example, B(A, B; C, D) andB(A, B ; C) are not usually the same. We now ask : What are allthe possible cross-ratios for four points, and what are the relationsbetween these cross-ratios? First, we have to consider in how manyways we can take the four points, i.e., how many ordered ways. Wecan take the first point in 4 ways, then the second in 3 ways, leaving2 ways for the third choice, and only 1 way for the fourth choice. Thisgives us 4.3.2.1= 24 ways ; and hence certainly at most 24 cross-ratios :but some of these may be equal. Incidentally, to write down the24 cross-ratios systematically, think of the four letters as composing aword, and order "words" lexicographically. Thus we would start :
A B C DA B D CA C B DA C D BA D B. C, etc.
arc
0-=
QU
A
0'0
28 LECTURES IN PROJECTIVE GEOMETRY CHAP. 1
Let us now consider the relations between the various cross-ratios.We have R(A, B; C, D) = (CA/CB)/(DA/DB) = (CAInterchange C and D. Then clearly the cross-ratio is inverted.
THEOREM. R(A, B ; D, C) =1/R(A, B; C, D).
This theorem, incidentally, tells us what the cross-ratio of a harmonictetrad must be. First, recall that if H(A, B ; C, D) and H(A', B'; C' D'),then (ABCD) A (A'B'C'D'), whence R(A, B ; C, D) = R(A', BI; C', D').So all harmonic tetrads must have the same cross-ratio, Let this be x.What is x? Well, if H(A, B; C, D), then also H(A, B; D, C), sox = R(A, B ; C, D) = B(A, B ; D, C). But quite generally R(A, B ; D, C)= 1/B(A, B ; C, D). So we have x =1 /x, whence x2 =1 and x= ± 1.Now 1 is not a cross-ratio, so x = -1. Hence we have the followingtheorem.
THEOREM. If H(A, B; C, D), then R(A, B; C, D) = -1.
THEOREM. Conversely, if R(A, B; C, D) = -1, then H(A, B ; C, D).
PROOF. Let A', B', C', D' be a harmonic tetrad. ThenR(A', B'; C', D') _ -1. Hence, by a previous theorem, (A'B'C'D') A(ABCD).. So, also by a previous theorem, H(A, B; C, D). Q.E.n.
Resume the previous discussion : A, B, C, D a general tetrad ofcollinear .points. In B(A, B; C, D), interchange A and B; then onereciprocates both the numerator and denominator of (CA/CB)/(DA/DB),and so inverts the whole cross-ratio. Hence :
THEOREM. B(B, A ; C, D) =1/B(A, B ; C, D).
Exercise. Using cross-ratios, prove that if H(A, B ; C, D), thenH(B, A; C, D). (Our previous way of doing this was better, as it was entirelyprojective. This way shows us how cross-ratios may point the way totruth.)
Thus, interchanging the first two letters inverts the cross-ratio, andinterchanging the last two letters inverts the cross-ratio. Combiningthese two facts, we obtain the following theorem.
THEOREM. R(A, B; C, D) = R(B, A ; D, C).
This theorem shows that the 24 ordered tetrads will yield at most12 cross-ratios.
So far we have interchanged the first two letters, and the last two,but have not interchanged letters from the two pairs. Let us thenconsider R(A, C; B, D). We have R(A, C ; B, D) = (BA/BC)/(DA/DC) = (BA DC)/(BC DA). Except for sign, the denominator
.,,
'`'
SEC. 15 EXTENSION OF HIGH SCHOOL GEOMETRY 29
here is the same as above for R(A, B ; C, D). To study these cross-ratios further, set up a coordinate system : let a, b, c, d be the coordinatesof A, B, C, D (Fig. 1.30). Then
(a-c).(b-d) = ab-ad-cb+cdand
BA-DC = ac-ad-bc+bd.subtracting,
ab-ac+cd-bd = (a-d)(b-c) = DA.CB.Therefore
DB BA-DCR(A, B ; C, D) + R(A, C ; B, D) =
CACB
DA_
CB DA
_ CA.DB-BA.DCCB-DA CB-DA
THEOREM. B(A, C ; B, D) =1- R(A, B ; C, D). In words : Inter-changing the middle two letters gives the difference from 1.
0 A B C D
o a b c d
FIG. 1.30
COROLLARY. B(D, B ; C, A) =1- R(A, B ; C, D), i.e., interchangingthe outer two letters also gives the difference from 1.
PROOF. We first put the outer letters in the middle : R(A, B ; C, D)= R(B, A ; D, C). Now we can interchange the middle letters :R(B, D; A, C)=1-B(B, A; D, C), whence R(D, B; C, A)=1- R(A, B ; C, D).
COROLLARY. R(A, B ; C, D) = B(D, C ; B, A), i.e., interchanging themiddle letters and also the other letters leaves the cross-ratio invariant.
PROOF. 1 - (1- x) = X.
THEOREM. The cross-ratio of A, B, C, D taken in any given order isequal to a cross-ratio of these points with A taken first.
PROOF. Suppose A is in the second place, and say we are consideringB(C, A ; B, D). Then B(C, A ; B, D) = R(A, C ; D, B). Suppose A isin the third place, and say we are considering R(C, B ; A, D). Then

P,.°9
30 LECTURES IN PROJECTIVE GEOMETRY Cusp 1
R(C, B ; A, D) = R(D, A ; B, C) = R(A, D ; C, B). A similar argumentholds if A is in the fourth place.
This theorem shows that the 24 ordered tetrads will yield at most6 cross-ratios. We need consider only R(A, B; C, D), R(A, B; D, C),R(A, C; B, D), R(A, C; D, B), R(A, D; B, C), R(A, D; C, B). Let ustry to calculate these six in terms of one of them, say the first : call thefirst A. We have
B(A, B; C, D) = A.R(A, B; D, C) = 1/R(A, B; C, D) = 1/A.R(A,C; B, D) = 1-R(A, B; C, D) = 1-A.R(A, C; D, B) = 1/R(A, C; B, D) = 1/(1-A).R(A, D ; B, C) = 1- R(A, B ; D, C) = 1-1/A.R(A, D;C, B) = 1-R(A,C; D, B) = 1-1/(1-A) = -A/(1-A).The question now is : Is 6 really the final answer, or can some of these
be equal? To see whether two of these can be equal, equate theirexpressions in A. Since the first cross-ratio, R(A, B ; C, D) was anarbitrary one of the six, we need only inquire whether any of the lastfive can equal the first. For the second to equal the first, we need
A = 1/A or A2 = 1.
This can happen only for special values of A, since by the FundamentalTheorem of Algebra, any polynomial equation of degree n has at mostn roots. In the present case, A= ± 1, and even A= + 1 is excluded.The value A= -1 corresponds to a harmonic tetrad.
Exercise. If H(A, B ; C, D), then how many cross-ratios are there?
In the same way, we ought to see what happens upon placing thethird equal to the first. This gives A =1- ,1, whence A = 1/2. Then,however, R(A, D; B, C)=1-1/,1=1-2=-1, so H(A, D; B, C):again we have, for an appropriate order, a harmonic tetrad.
Exercise. Study the three remaining cases.
Summing up we can say : In general there are exactly 6 cross-ratios,but for some special cases there may be less.
16. Construction of the projective plane. By now it is probably fairlyclear what type of theorem we would like to study in projective geo-metry. The existence of parallel lines in the plane is the main cause oftrouble. We have been, in the last few pages, simply neglecting theexistence of parallel lines ; except for this neglect, most of the con-siderations were quite rigorous. We will, therefore, try to constructan object that shall have the following properties : it should be very
,.,e'
'O
ate
...
...
...
(CD
R..
a,,
C',
tea.
Lt'
chi
et-
ti,
4''
't1ala7
CID
4-q
mam
bo
tip0,0
...
(D,
SEc. 16 EXTENSION OF HIGH SCHOOL GEOMETRY 31
much like the ordinary, Euclidean plane, but the parallel postulateshould not hold ; rather, any two lines should meet in one and only onepoint. To achieve this end, we are going to start with an ordinaryEuclidean plane and modify the meaning of the words point, line, etc.,so that the parallel postulate will fail and so that any two lines meet inone and only one point ; but the modification should not be so drasticthat the resulting object, which we will call the projective plane, wouldbear no obvious relation to the plane we start with.
In the following we are making a construction, and the material is theordinary plane ; the procedure is not the axiomatic one we shall studyshortly. Meanwhile the ordinary plane rests on an axiomatic founda-tion that we are not examining. Nonetheless, in order to be fairlyexact, let us put down precisely what we are going to use in the con-struction. The main propositions used will be :
I. On any two points there is one and only one line.II. Given a line and a point not on the line, there is one and only one
line on the given point not meeting the given line.
The term "Euclidean" usually has the connotation that the conceptof distance is involved ; to avoid this connotation, one speaks of theaffine plane. That is, in what immediately follows, we use propositionsI and II, but in no manner use the concept of distance. One may saythat one is starting from the affine plane.
Consider two parallel lines in the affine plane. They do not meet.We are going to so modify the meaning of the word line that the lineswill meet. In order to distinguish the kind of lines we start with fromthe kind we finish with, which will be like but not the same as those westart with, we will call the second kind Lines, i.e., write the word with acapital letter. In speaking, we may say projective line, setting thisphrase in opposition to affine line. We will also modify the concept ofpoint, speaking then of projective points and affine points, and writingPoint for a point of the new kind.
For each line we are going to introduce a new object, a Point, a pro-jective point; and for parallel lines, the same object; for nonparallellines, different objects. What are these new objects? Anything atall, just so long as for parallel lines we take the same object and forintersecting lines, different objects. For concreteness' sake, we couldtake the various pencils of parallel lines as the new objects, and wouldthen say that on the given line l there now lies the parallel pencil deter-mined by 1; but such definite choice is not necessary and is even incon-venient. Let us call these new objects Ideal Points. (By a pencil oflines one means all the lines parallel to a given line or all the linesthrough a given point.)
500
Via'
Q'41
°+'.
32 LECTURES IN PROJECTIVE GEOMETRY CH". 1
DEF rrioN. By a Point, or projective point, we will mean either anordinary point or an Ideal point.
Suppose now we take as the definition of a Line, or projective line,the following :
A Line, or projective line, shall consist of an ordinary line and theIdeal Point that it determines.
(This will not be the final definition : we want to see what happenswith the above definition.)
With these definitions, do any two Lines meet ? Yes. Take twoLines. Each Line consists of an ordinary line l and an Ideal Point P;let us write this line, notationally, as (1, P). Now take two Lines :(1, P), (m, Q). Here d and m are affine lines that may or may not meet.(a) If l and m do not meet, then they are parallel, so P=Q, and (1, P) and(m, Q) meet in one and only one Point, namely, P. (b) If l and m domeet, say in a point R, then P#Q, and (1, P) and (m, Q) meet in oneand only one Point, namely R. Therefore we would have, instead ofII, the proposition :
II'. On any two Lines there is one and only one Point.This is what we want : but we also want our old proposition I.I. On any two Points there is one and only one Line.
Do we have it? No, because each Line, according to the abovedefinition, has on it just one Ideal Point ; therefore, if we take two IdealPoints, there could be no Line on both of them. We get around thisdifficulty by defining Line as follows.
DErzNmoN. A Line, or projective line, shall consist of an ordinaryline and the Ideal Point which it determines : also the totality ofIdeal Points shall be said to constitute a Line.
This new Line, consisting of all the Ideal Points, we may call theIdeal Line : any other Line has on it just one Ideal Point.
Now do we have proposition 11 We have to take two Points, P andQ, and see if there is one and only one Line on them. If P and Q areboth Ideal Points, then the Ideal Line, and no other, is on both P andQ. Suppose P is Ideal, but Q is not. The Ideal Point P is determinedby a pencil of parallel lines, and we are asking how many of them areon Q. Obviously one, and only one. Now, what if neither P nor Qis Ideal. Then P, Q determine an ordinary line 1; 1 determines a Line(1, R) ; and (1, R) is the one and only Line on P and Q.
So we have I. But how about II'? In checking this before, wewere not using our final definition of Line, so we have to go throughthe proof again, if we can.
,,..,;
S$c. 17 EXTENSION OF HIGH SCHOOL GEOMETRY 33
Exercise. Can we?
It turns out that we can, and so the object we have just constructedhas the basic properties I and IF and is called a projective plane.
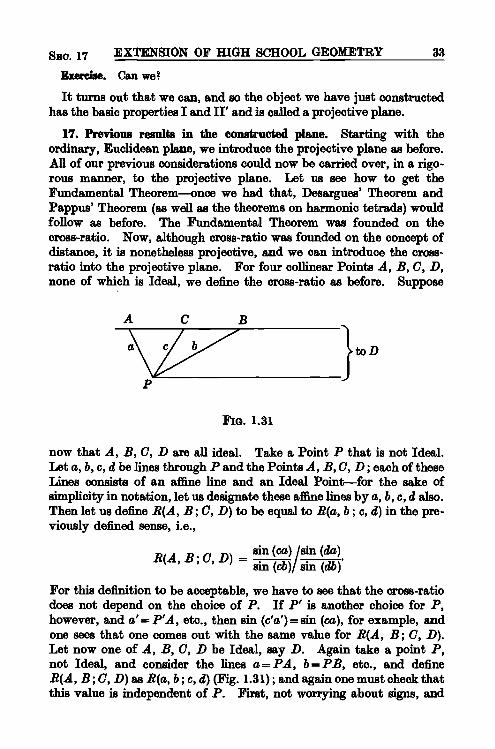
17. Previous results in the constructed plane. Starting with theordinary, Euclidean plane, we introduce the projective plane as before.All of our previous considerations could now be carried over, in a rigo-rous manner, to the projective plane. Let us see how to get theFundamental Theorem-once we had that, Desargues' Theorem andPappus' Theorem (as well as the theorems on harmonic tetrads) wouldfollow as before. The Fundamental Theorem was founded on thecross-ratio. Now, although cross-ratio was founded on the concept ofdistance, it is nonetheless projective, and we can introduce the cross-ratio into the projective plane. For four collinear Points A, B, C, D,none of which is Ideal, we define the cross-ratio as before. Suppose
A C B
a c b to D
P
Fia. 1.31
now that A, B, C, D are all ideal. Take a Point P that is not Ideal.Let a, b, c, d be lines through P and the Points A, B, C, D ; each of theseLines consists of an affine line and an Ideal Point-for the sake ofsimplicity in notation, let us designate these affine lines by a, b, c, d also.Then let us define B(A, B; C, D) to be equal to R(a, b ; c, d) in the pre-viously defined sense, i.e.,
R(A, B; C, D) = sin (ca) Jsin (da)sin (cb) sin (db).
For this definition to be acceptable, we have to see that the cross-ratiodoes not depend on the choice of P. If P' is another choice for P,however, and a' = P'A, etc., then sin (c'a') = sin (ca), for example, andone sees that one comes out with the same value for R(A, B; C, D).Let now one of A, B, C, D be Ideal, say D. Again take a point P,not Ideal, and consider the lines a = PA, b = PB, etc., and defineB(A, B ; C, D) as B(a, b ; c, d) (Fig. 1.31) ; and again one must check thatthis value is independent of P. First, not worrying about signs, and
M$`
`ad,
...
gyp.
o-..
.4b
tom
aim
91.
'M.4
34 LECTURES IN PROJECTIVE GEOMETRY CH". 1
recalling that the area of a triangle is given by one-half the product ofany two sides and the sine of the included angle, we have :
R(AB, CD) = sin (ca) /sin (da)sin (cb)/sin (db)
2(area CPA)/CP AP 2(area CPA)/(CA AP) _ CA2(area CPB)/CP BP/2(area CPB)/(CB. BP) CB
Therefore, except possibly for sign, R(A, B; C, D)=CA/CB. As forthe sign, sin (da)/sin (db) is certainly positive and sin (ca)/sin (cb) clearlyhas the same sign as CA/CB. So the sign is right, too.
Thus we can at least define cross-ratio, but we still have to see thatit is invariant under a projectivity. It is sufficient to see that
(A BCD)P
(A'B'C'D') implies R(A, B ; C, D) = R(A', B'; C', D').
If P is not an ideal point and if a, b, c, d are the lines PA, PB, PC, PD,then
R(A, B; C, D) = sin (ca) /sin (da)sin (cb)/sin (db)
either by definition if at least one of the points A, B, C, D is ideal, orby previous results if none of the points A, B, C, D are ideal. ThatR(A, B ; C, D) = B(A', B'; C', D') follows immediately. There is stillthe case to consider that P is ideal. We will not write out the detailsof the proof, which is entirely straightforward.
With the Dross-ratio in hand, we could easily make rigorous all, oralmost all, of our previous considerations. Even so, we would, in thisway, always have with us, in the foundation at any rate, concepts foreignto the center of our interest, namely, the projectively invariantive typeof theorem. The most satisfying way to proceed now is to start allover again and lay the foundations of projective geometry axiomatically-and what that means, we shall see.
18. Analytic construction of the projective plane. Before doing that,however, there is one topic that may most conveniently be dealt withhere. Starting with the ordinary, Euclidean plane, we introducecoordinates in the familiar manner. Each point then has an orderedpair of numbers (x, y) as coordinates, different points have differentcoordinates, and a line consists of all the points whose coordinates(x, y) satisfy a given linear equation ax + by + c = 0, where a 0 0 or b :h 0.To free ourselves from any doubt as to what Euclid's axioms were, wecould proceed as follows : we define a point to be an ordered pair of
m+
aa~
mob
t.4
°p°
...C
::
amp
coo
Its
pro
O'''f
f
Gay
C::
o-°
...a3
.
`"1
map
.m,
awl
cm.
fluIII
Sxc. 18 EXTENSION OF HIGH SCHOOL GEOMETRY 35
numbers (x, y), and a line to be the set of solutions (x, y) to a linearequation ax + by + c = 0, where a 0 0 or b # 0. It is a simple algebraicexercise to prove that with point and line thus defined, the followingpropositions hold.
I. On any two points, there is one and only one line.II. Given any line and a point not on the line, there is one and only,
one line through the point not meeting the given line.
Exercise. Translate these propositions into directly algebraic statements.Solution. To say that there is & line ax+by+c=O through points (x1, y1),
(X2, y2) is to say that the system of simultaneous equations
axi+byi+c = 0axs+by2+c = 0,
in the unknowns a, b, c, has a solution with a # 0 or b # 0. Assume that thepoints (x1, yl), (x2, ya) are distinct, i.e., that x10 xa or yl # yQ. The statementthat there is only one line through the points comes to.saying that if (a, b, c)and (a', b', c') are solutions of the above equations, with a0 or b0 anda'3& 0 orb' # 0, then any solution (x, y) of either of the equations ax+by+c =0,a'x+b'y+c'=0 is a solution of the other. (Under these circumstances, onecan prove that (a', b', c') is a multiple of (a, b, c), i.e., that there is a numberA such that a' = Aa, b' =,1b, c' = Ac. Thus all equations of a given line arerelated simply to one another : each is a multiple of the others. Because ofthis, one speaks of the equation of a line, although this is not an exact way ofspeaking, since a line has many equations.)
As to proposition II, this can be stated as follows. Let a, b, c, x1, yl benumbers with a # 0 or b # 0 and ax 1+ by1+c # 0. Then there are numbersa', b', c' with a'00 or b'960 such that a'x1+b'y1+c'=0 and such that theequations ax+by+c=0 and a'x+b'y+c'=0 have no common solution; andif a", b", c" have the properties just stated for a', b', c', then any solution ofeither of the equations a'x+b'y+c'=0 and a"x+b"y+c"=0 is a solution ofthe other.
In other words, points and lines, thus defined, together constitute anaffine plane. To this plane can be adjoined new points, the so-calledIdeal Points, so that the resulting object is a projective plane. Wedid this, before, synthetically, and want to show now how to do itanalytically ; the only difference is that now we want to define the newpoint to be added to a line in terms of the equation of the line.
Let ax + by + c = 0 be a line (or equation of a line). Here we think ofa, b, c fixed and x and y as variables, or letters. One also has occasion,however, to consider (x, y) as fixed, and a, b, c as variables. For ex-ample, suppose one asks about the lines through the given point(u, v) ; any such line would be of the form ax + by + c = 0 and we wouldbe concerned to know those triples (a, b, c) for which au + by + c = 0.
Consider equations of the form ax + by + c = 0 solely from the algebraic
D4°
N°,
'''''d
m+
+'-,
...
2.c,
&-?
dby
"
God
.+,
...
bay
,,,
°a.
.-0
V-+
5III
.j.
5'0
"lo
o$"a
+a
....+
,..+
P+°
.C!
...
``a
PEA
g;,
fly`'"
++
.t!too
4,".,.
36 LECTURES IN PROJECTIVE GEOMETRY CH". 1
point of view for a moment. If a, b, c are understood to be fixed num-bers, and x and y letters, this equation is of the first degree in x and y,because each term involves x and y multiplied together only to thefirst power at most (dxPys is said to be of degree p + q in x and y, if d isfixed and not equal to zero-so ax and by are of degree 1, and c is ofdegree 0, provided they are different from zero : zero is not given adegree). If we regard x, y as fixed, and a, b, c as variables, thenax + by +c = 0 is also of the first degree in a, b, c. If all the terms of anequation are of equal degree, we say it is homogeneous--otherwise,nonhomogeneous. Thus ax + by + c = 0 is nonhomogeneous in x and y(provided c O 0), but is homogeneous in a, b, c.
In studying the equation ax + by + c = 0, it is sometimes convenientto bring it into association with the equation aX + b Y + cZ = 0, whichhas the advantage of being homogeneous. Any information we haveon aX + b Y + cZ = O could be translated into information on ax + by + c= 0, and vice versa. Suppose, for example, that (X, Y, Z) is a tripleof numbers satisfying the equation aX + b Y + cZ = 0 ; and supposeZOO. Then X/Z, Y/Z will be a pair of numbers satisfying ax + by + c=0, i.e., a(X/Z)+b(Y/Z)+c=0. Conversely, if (x, y) is a pair ofnumbers satisfying ax + by + c = 0, then (x, y, 1) will be a triple satisfyingaX + b Y + cZ = 0, as will (,1x, Ay, .1), and in fact any triple (X, Y, Z)will be a solution if X 1Z = x, Y/Z = y. There are further solutions toaX + b Y + cZ = 0, which do not correspond to solutions of ax + by + c = 0,namely, those for which Z = 0. The solution (0, 0, 0) will, of course,give us no information on ax + by + c = 0, because every equation of theform aX + b Y + cZ = 0 has (0, 0, 0) as a solution, and this solution istherefore called the trivial solution : any other solution (X, Y, 0), withX # 0 or Y # 0, would yield information on the equation ax + by + c = 0;it would tell us, in fact, that a and b are such that aX + b Y = 0.
Let us now consider the situation also from the geometric point ofview. We are interested in (ordered) pairs of numbers (x, y) and also(ordered) triples (X, Y, Z) : let us associate the pair (x, y) with a triple(X, Y, Z) if Z # 0, X/Z = x, and Y/Z = y. The pair (x, y) represents, oris, a point. If X/Z = x, Y/Z = y, then the triple (X, Y, Z) may alsorepresent the point, because given these three numbers, and knowingthat they are related to x and y in the above way, we can say with whatpoint the triple is associated. That being so, we may speak of (X, Y, Z)as being homogeneous coordinates of the point (x, y). Note that if(X, Y, Z) are homogeneous coordinates of a point, then (AX, AY, AZ),if A 96 0, are also homogeneous coordinates of the same point. If wewant to speak of the point with coordinates (X, Y, Z) we may sometimessay "the point (X, Y, Z)," but this is not an exact expression. We will,however, refer to the point with coordinates X, Y, Z as "the point
-4o
err
°-~
erg
"`'
`~y .5--
.m1`
Zlo
b'H
.'H
.
boy
coo
her
O'+
e0+
f3'
yap
9"f"
,-I
-",
y'.Y
mO
.
p.°
e`'
y°+
Ge}
Nom
'L3
..11
p.;
SAE
°9,+ ."w
ado
0.,
Sac. 18 EXTENSION OF HIGH SCHOOL GEOMETRY 37
% 2 4
P Y " : this is exact--P 13 and P 6 , for example, are the mmZ 5 10
point.Let us separate all ordered triples of numbers (not all of which are
zero) into classes, putting two triples (X, Y, Z), (X', Y', Z') into thesame class if there is a A # 0 such that X'= AX, Y' = AY, Z'= AZ. Inthis way, all the triples corresponding to a point form a single class.Note that if (X, Y, Z) is a solution to the equation aX + b Y + cZ = 0,then so is (AX, AY, AZ) : together with a nontrivial solution (X, Y, Z)we get a whole class of solutions to aX + b Y + cZ = 0. It is convenientto speak of these clasaea as solutions, but note that the word "solution"now has a slightly different meaning-in particular, in this new sense,we do not refer to (0, 0, 0) as being a solution at all.
Let now a line be given by the equation ax + by + c = 0, and consideralong with it the corresponding homogeneous equation a% + b Y + cZ = 0.By a solution of this homogeneous equation we mean a class of triples,as explained above. Then every solution (x, y) of ax + by + c = 0 yieldsa solution {(AX, AY, AZ)} of aX+bY+cZ=0 for which Z#0; and con-versely, every solution {(AX, AY, AZ)} of aX+bY+cZ=0 for whichZ#0 yields a solution (x, y) of ax+by+c=0. (The symbol {. . .} isused to indicate a whole set of objects, and between the braces is placedeither the whole set or a typical element of the set.) Thus there is aone-to-one correspondence between the solutions of ax + by + c = 0 andthose of aX+bY+cZ=0 in which the third coordinate does not equalzero. How many solutions of aX + b Y + cZ = 0 are there for whichZ = 0 ? Recall, (0, 0, 0) does not count as a solution. Recall also that,since ax + by + c = 0 represents a line, we have a # 0, or b # 0. Therefore(- b, a, 0) is a solution, or rather, we should say, represents a solutionof aX + b Y + cZ = 0. Either a # 0 or b # 0; let us proceed under theassumption that a o 0-were a = 0, then b # 0, and the considerationswould be quite the same except for notation. Now we are looking fortriples (X, Y, 0) satisfying aX + b Y + cZ = 0. Were Y = 0, then aX +b 0 + c 0 = 0, so also 1=0, but (0, 0, 0) is out. So Y0 for any solu-tion (X, Y, 0). Fixing Y # 0, we solve for X : X = - b Y/a. Therefore,every solution with Z = 0 must be of the form ((- bra) Y, Y, 0), andthese, we observe, constitute precisely one class, i.e., there is just onesolution more to the equation aX + b Y + cZ = 0 than was already con-sidered previously. (Note that the word "solution" is used in twosenses-and that with each use of the word one must understand fromthe context in what sense it is being used.)
Let us now call the classes that are the solutions of aX + b Y + cZ = 0Points. There is then a close relation between the points of ax+by+c
,am
e++
mom
G2+ '-'
...
ear
...
mm
.
''C
c°.
'LS
0'O..y ..y.o"
.tipr"
quo
38 LECTURES IN PROJECTIVE GEOMETRY CH" 1
= 0 and the Points of aX + b Y + cZ = 0: they are, in fact, in one-to-onecorrespondence except for just one Point. The equation aX+bY+cZ= 0 has, so to speak, room for just one more solution than doesax + by + c = 0. Let us take this extra solution, this Point with Z = 0,as the object to be specified as the Ideal Point on the line ax + by + c = 0.We must here observe that a line does not have only one equation, butif a x + by + c = 0 is an equation, then Aax + Aby + Ac = 0, A 0, is also anequation, and conversely, if ax + by + c = 0 and a'x + b'y + c' = 0 areequations of the same line (i.e., have the same set of solutions), thenthere is a A, A 0, such that a' = Aa, b' = Ab, c' = Ac. Thus the solutionof aX + b Y + cZ = 0 for which Z=0 is the same as that of AaX + Ab Y +AcZ = 0 for which Z = 0. That is, we have specified just one IdealPoint to each line. Also, distinct lines ax + by + c = 0 and ax + b'y +c'= 0 do not have a solution in common, i.e., are parallel, if and only ifthere is a A 0 0 such that a' = Aa, b' = Ab. Thus the same Ideal Point isassigned to parallel lines, different Ideal Points to intersecting lines.
We now come to the following curious consideration. The linesax + by + c = 0 give rise to almost all the equations of the form aX +b Y + cZ = 0-the only one, or ones, that they do not give rise to is theequation cZ = 0: since this equation and the equation Z = 0 have pre-cisely the same solutions, we may say that there is just one equationaX + b Y + cZ = 0 not arising from a line, namely, the equation Z = 0.Now this equation is precisely the condition (or equation) on thecoordinates of an Ideal Point. Hence, if by a Line we mean the setof Points satisfying an equation aX + b Y + cZ = 0, with not all a, b, c = 0,then we have coordinates for all the Points of the projective plane andlinear equations for all the Lines.
19. Elements of linear equations. In the above analytical construc-tion we omitted a number of details that we proceed to fill in :
THEOREM. If xt r' x2 or y10 y2, then the simultaneous system ofequations :
(1) axl+byl+c = 0(2) axe+by2+c = 0in the unknowns a, b, c have a solution with a 0 or b 0 0. Moreover,if (a, b, c) and (a', b', c') are solutions with a00 or b00 and a'960 orb' :A 0, then there is a number A such that a' = Aa, b' = Ab, c' = Ac.
PROOF. Observe first that if (a, b, c) is a solution, then also (Aa, Ab, Ac)is a solution for every A O 0. This leads us, just as in the previous sec-tion, to put two triples (a, b, c), (a', b', c') into the same class if one is amultiple (by a A 96 0) of the other : we then speak of the class as a solu-

ass
.°,'
obi
dew
SEC. 19 EXTENSION OF HIGH SCHOOL GEOMETRY 39
tion, and the theorem can then be restated as saying that (1) and (2)have one and only one nontrivial solution.
We proceed to solve (1) and (2) simultaneously in the familiar way.If (a, b, c) is a solution of (1) and (2), then, subtracting (1) from (2), weobtain :
(3) a(x2-xl)+b(y2-yl) = 0.We have x2 0 xl or y2 0 yl, say x2 # xl. Then we get
a = -b y2-yx2-xl
c= -byl-ax1 = b y1-xl Y2x2-Y1-x11L
-b[y1(x2-xi)-xl(y2-y1)1x2-xl
-Thus a, b, c are btimes, respectively, y2 - yl, - (x2 - xl),
x2 x1yl(x2-x1)-xl(y2-yl). We reach a similar conclusion if after (3) weproceed under the assumption y2 A y1, rather than x2 * xl. So far,then, we have established that there is at most one nontrivial solutionof (1) and (2), namely, the solution, if any, must be the class of (y2- y1,- (x2-xl), y1(x2-x1)-x1(Y2-y1))
To see that there is a solution we check that (Y2-Y1,-(X2-X1),y1(x2 - x1) - xl(y2 - yl)) satisfies (1) and (2). It is not the trivial solutionsince y2-y1#0 or -(x2-x1)00.
COROLLARY. Through two points (xi, y1), (x2, y2) there passes one andonly one line.
TREORErl. Let a, b, c ; a', b', c' be numbers with a 0 or b # 0 anda'54 0 or b' 0. If ab' - a'b 0 0, then the simultaneous system
(1) ax+by+c = 0
(2) ax + b'y + c' = 0
in the unknowns x, y has exactly one solution. If ab' - a'b = 0, theneither the system has no solution; or if it has a solution, then it has atleast two solutions (whence by the previous theorem (a', b', c') is a mul-tiple of (a, b, c) and every solution of either (1) or (2) is a solution of theother).

Peg
rope
s
cam
CF
O
CSC
40 LECTURES IN PROJECTIVE GEOMETRY Clop I
PROOF. Multiplying (1) by b' and (2) by b and subtracting, we get
(3) (ab'-a'b)x+b'c-bc' = 0.Multiplying (1) by a' and (2) by a and subtracting, we get
(4) (a'b - ab')y + a'c - ac' = 0.
If ab' - a'b # 0, then from (3) and (4) we see that if (x, y) satisfies (1)and (2) then x=(-b'c+bc')/(ab'-a'b) and y=(ac'-a'c)/(a'b-ab').Thus there is at most one solution to (1) and (2) : conversely, onechecks directly that these values of (x, y) satisfy (1) and (2).
If ab' - a'b = 0, then there is a number A00 such that a' = Aa,
b'= Ab : in fact, a :A 0 or b 0 0 ; if a # 0 we can write b'=a
b and a'= aa,a a
so A= a'/a ; a similar result holds if b:00. Dividing (2) by A (whichdoes not equal zero since a' 0 or b'96 0), we get an equation (5) havingthe same solutions as (2) :
(5) ax+by+d = 0, where d = c'/A.
If d#c, then clearly (1) and (5), hence also (1) and (2), have no commonsolution. If d=c, then every solution of (1) is a solution of (2); in thiscase it remains to see that (1) has at least two solutions. If a 9k 0, thenplacing y = 0, 1 successively in (1), we solve for x to get two solutions.Similarly if b o 0.
From the proof, any line not meeting ax + by + c = 0 has an equationof the form ax+by+d=0. Hence if (xi, yl) is not on ax+by+c=0,there is one and only one line on (xi, yi) that does not meet ax +by+c=0, namely, ax + by - ax, - by, = 0.
In sum, we have proved in detail propositions I and II of the previoussection.
Exercises
1. The following properties of points, lines, and planes are familiar fromhigh school solid geometry.
1. On any two points there is one and only one line.2. On any three noncollinear points there is one and only one plane.3. If two points of a line are on a plane, then the line is on the plane.4. Two planes cannot meet in a single point.5. Not all points are on the same plane.
6A. Every plane is an affine plane. (Since each plane is affine, the ParallelPostulate holds in each of them. Parallel lines, then, are coplanar linesthat do not meet; in addition, a line is said to be parallel to itself.)
7A. Lines parallel to the same line are parallel to each other.
SEC. 19 EXTENSION OF HIGH SCHOOL GEOMETRY 41
These properties characterize a so-called affine 3-space. A projective3-space is characterized by conditions 1 through 5, but this time we require :
6P. Every plane is a projective plane.
The exercise is as follows. Given an affine 3-space, show how to introduceideal points to obtain a projective 3-apace.
2. Introduce the ideal points for projective 3-space using coordinates.
pro
AC
A
LM
.''+
...af
t sib
U-0
.0s
o-!
mss
L,+
c°.t'.
apooz's
-;,,,
Bob
°04-0
..,
+O
'cad
CHAPTER II
THE AXIOMATIC FOUNDATION
1. Unproved propositions and undefined terms. One way to establisha theorem is to prove it, and that means to show how it follows fromprevious theorems, i.e., theorems we already regard as established. Ifnow we demand that these previous theorems be proved, we have to goback to still earlier theorems, and so on. It becomes clear that if weare going to prove anything, there must also be propositions that weregard as true but for which we demand no proof. In order to goforward, we must stop going backward. When certain propositionsare laid down as the starting point of a deductive theory, and no proofsare required for these propositions, then these propositions are calledaxioms.
Axioms are sometimes said to be obvious truths. Sometimes peoplesay that a thing is obvious when they are in no position to offer a proof.We, too, will use this convenient word, but only to indicate that certaindetails of a proof are being left out, and that anyone who has otherwisefollowed the argument can easily supply the missing details for himself.In this sense, it is incorrect to speak of axioms as being obvious, becausethere is no question of proof involved.
Just as it is with propositions, so is it with definitions. To define anobject or term is to give its meaning in terms of other objects and terms,and to define these would mean to relate them to still other objects andterms, and so on. Again it is clear that if anything is to be defined,there must also be undefined terms.
2. Requirements on the axioms and undefined terms. The aboveseems to leave the axioms in such a nebulous state that one can askwhat it is that makes us choose certain statements as axioms and notothers. Part of these doubts can be easily laid to rest : the axioms wechoose will depend upon the kind of things we want to study. If wewant to study algebra, our axioms will have an algebraic sound tothem : and if we want to study geometry, then they will have a geo-
42
i1.°
.
...
..,
axePad
L.'
c0.
SEC. 3 THE AXIOMATIC FOUNDATION 43
metric sound. The axioms are thus roughly determined by the subjectmatter we want to consider and by the theorems that we would like toestablish. It is for this reason that a preliminary and not whollyrigorous consideration of various geometric theorems was entirely inorder.
Actually there are absolutely no requirements on an axiom system,but only desiderata. What these are we shall see in a moment. Mean-while, to make the argument definite, let us write down the axioms thatwill mainly interest us in the near future.
3. Undefined terms and axioms for a projective plane. The kind ofthing we roughly have in mind for study is the projective plane. Asundefined terms we take point, line, and a relation on. There is no usein asking what we mean by a point, because we are taking points asundefined ; and the same is true for lines. We have a certain set ofobjects, absolutely unrestricted in character, and these are to be calledpoints; another set of objects, also unrestricted, are to be called lines.We also have an undefined relation between points and lines : a point Pand a line l may be in such a relation that we say P is on 1; again, wedo not ask what this means, taking it as undefined. If P is on l we willalso say l is on P : this is already a definition, but it is of such a triflingnature that we will not label it. We will also say that l passes through Pif P is on 1--we do not need this extra phrase, but there is nothingillogical in its use. If l and m are lines, and P is on l and P is on m, wewill say that l and m meet at P, or cross at P, or intersect in P ; ifpoints P and Q are on 1, we will say that l joins P and Q. If it is notthe case that P is on l we will say P is not on 1.
We take the following as axioms :
0. There exist at least one point and at least one line.I . If P and Q are distinct points, then there is at least one line on both
of them.2. If P and Q are distinct points, then there is at most one line on both
of them.3. If m and n are distinct lines, then there is at least one point on both of
them.4. There are at least three points on any line.5. Not all points are on the same line.
4. Initial development of the system; the Principle of Duality. Beforediscussing the suitability of the above system, let us develop it some-what. In the course of doing so, we shall draw figures. These figuresare only intended to help us keep in mind the objects being spokenabout. They may sometimes suggest the truth to us, but they may
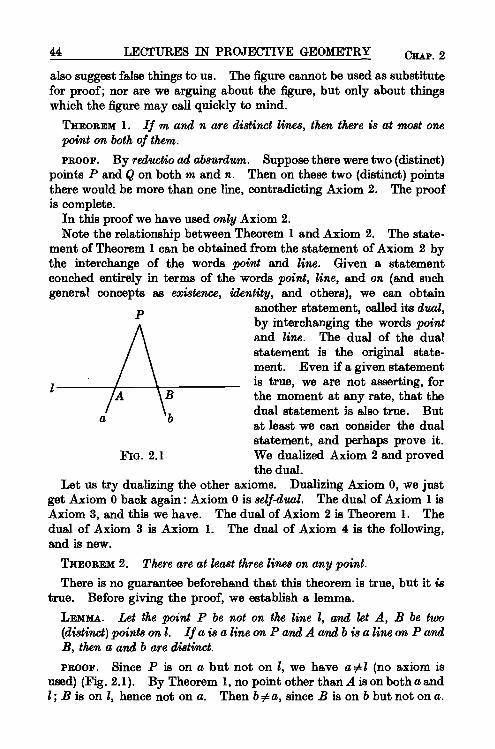
5,4
o°°
ti..0b
y,;
,.a,y+
c+7
a.,
44 LECTURES IN PROJECTIVE GEOMETRY Cser 2
also suggest false things to us. The figure cannot be used as substitutefor proof ; nor are we arguing about the figure, but only about thingswhich the figure may call quickly to mind.
THEOREM 1. If m and n are distinct lines, then there is at most onepoint on both of them.
PROOF. By reductio ad absurdum. Suppose there were two (distinct)points P and Q on both m and n. Then on these two (distinct) pointsthere would be more than one line, contradicting Axiom 2. The proofis complete.
In this proof we have used only Axiom 2.Note the relationship between Theorem 1 and Axiom 2. The state-
ment of Theorem 1 can be obtained from the statement of Axiom 2 bythe interchange of the words point and line. Given a statementcouched entirely in terms of the words point, line, and on (and suchgeneral concepts as existence, identity, and others), we can obtain
P another statement, called its dual,by interchanging the words pointand line. The dual of the dualstatement is the original state-ment. Even if a given statementis true we are not assertin for, g,l T
FIG. 2.1
the moment at any rate, that thedual statement is also true. Butat least we can consider the dualstatement, and perhaps prove it.We dualized Axiom 2 and provedthe dual.
Let us try dualizing the other axioms. Dualizing Axiom 0, we justget Axiom 0 back again : Axiom 0 is self-dual. The dual of Axiom 1 isAxiom 3, and this we have. The dual of Axiom 2 is Theorem 1. Thedual of Axiom 3 is Axiom 1. The dual of Axiom 4 is the following,and is new.
THEOREM 2. There are at least three lines on any point.
There is no guarantee beforehand that this theorem is true, but it istrue. Before giving the proof, we establish a lemma.
LEMMA. Let the point P be not on the line 1, and let A, B be two(distinct) points on 1. If a is a line on P and A and b is a line on P andB, then a and b are distinct.
PROOF. Since P is on a but not on 1, we have a # 1 (no axiom isused) (Fig. 2.1). By Theorem 1, no point other than A is on both a and1; B is on 1, hence not on a. Then b 0 a, since B is on b but not on a.
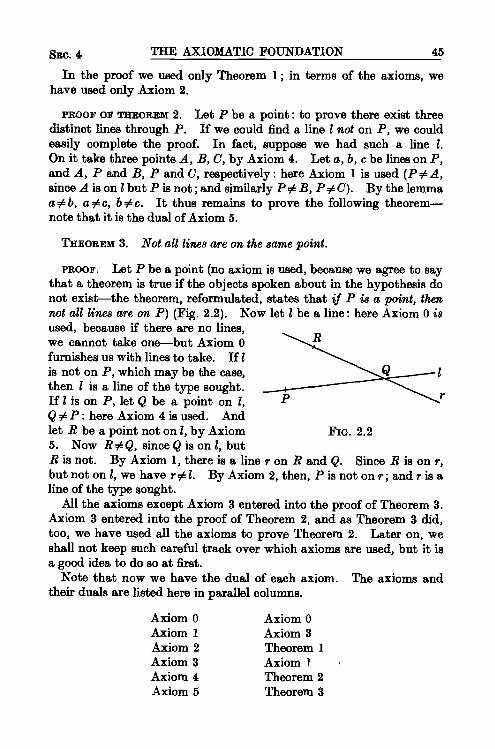
0W5
.-4
0
wry
SEc. 4 THE AXIOMATIC FOUNDATION 45
In the proof we used only Theorem 1; in terms of the axioms, wehave used only Axiom 2.
PROOF OF THEOREM 2. Let P be a point : to prove there exist threedistinct lines through P. If we could find a line l not on P, we couldeasily complete the proof. In fact, suppose we had such a line 1.On it take three points A, B, C, by Axiom 4. Let a, b, c be lines on P,and A, P and B, P and C, respectively : here Axiom 1 is used (P,e A,since A is on l but P is not ; and similarly P O B, P # C). By the lemmaa # b, a 0 c, b # c. It thus remains to prove the following theorem-note that it is the dual of Axiom 5.
THEOREM 3. Not all lines are on the same point.
PROOF. Let P be a point (no axiom is used, because we agree to saythat a theorem is true if the objects spoken about in the hypothesis donot exist-the theorem, reformulated, states that if P is a point, thennot all lines are on P) (Fig. 2.2). Now let l be a line : here Axiom 0 isused, because if there are no lines,we cannot take one-but Axiom 0furnishes us with lines to take. If 1is not on P, which may be the case,then l is a line of the type sought.If l is on P, let Q be a point on 1,Q 0 P : here Axiom 4 is used. Andlet R be a point not on 1, by Axiom5. Now R 0 Q, since Q is on 1, but
FIG. 2.2
R is not. By Axiom 1, there is a line r on R and Q. Since R is on r,but not on 1, we have r,E 1. By Axiom 2, then, P is not on r ; and r is aline of the type sought.
All the axioms except Axiom 3 entered into the proof of Theorem 3.Axiom 3 entered into the proof of Theorem 2, and as Theorem 3 did,too, we have used all the axioms to prove Theorem 2. Later on, weshall not keep such careful track over which axioms are used, but it isa good idea to do so at first.
Note that now we have the dual of each axiom. The axioms andtheir duals are listed here in parallel columns.
Axiom 0 Axiom 0Axiom 1 Axiom 3Axiom 2 Theorem 1Axiom 3 Axiom 1Axiom 4 Theorem 2Axiom 5 Theorem 3
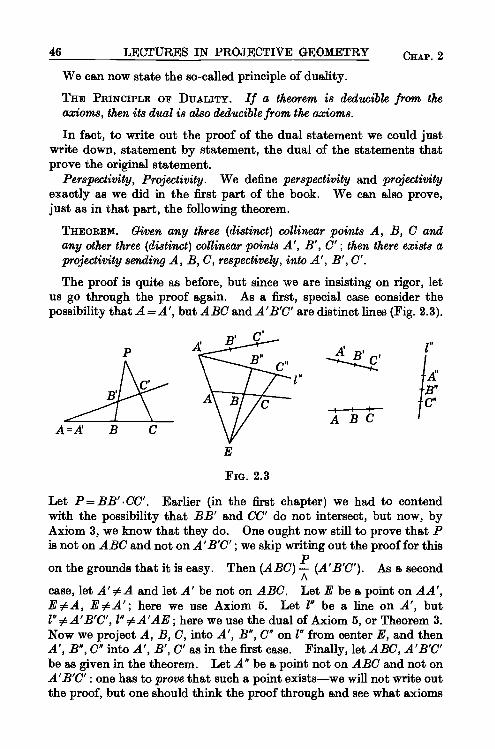
Dip
c0+
"..t'
0
uce
aft
46 LECTURES IN PROJECTIVE GEOMETRY CHAP 2
We can now state the so-called principle of duality.
THE PRINCIPLE OF DUALITY. If a theorem is deducible from theaxioms, then its dual is also deducible from the axioms.
In fact, to write out the proof of the dual statement we could justwrite down, statement by statement, the dual of the statements thatprove the original statement.
Perspectivity, Projectivity. We define perspectivity and projectivityexactly as we did in the first part of the book. We can also prove,just as in that part, the following theorem.
THEOREM. Given any three (distinct) collinear points A, B, C andany other three (distinct) collinear points A', B', C'; then there exists aprojectivity sending A, B, C, respectively, into A', B', C'.
The proof is quite as before, but since we are insisting on rigor, letus go through the proof again. As a first, special case consider thepossibility that A =A', but ABC and A'B'C' are distinct lines (Fig. 2.3).
B, CI l- 11
E
FIG. 2.3
Let P = BB' . CC'. Earlier (in the first chapter) we had to contendwith the possibility that BB' and CC' do not intersect, but now, byAxiom 3, we know that they do. One ought now still to prove that Pis not on ABC and not on A'B'C'; we skip writing out the proof for this
on the grounds that it is easy. Then (ABC) P (A'B'C'). As a second
case, let A' O A and let A' be not on ABC. Let E be a point on AA',BOA, BOA'; here we use Axiom 5. Let l" be a line on A', butl" A'B'C', l" O A'AE ; here we use the dual of Axiom 5, or Theorem 3.Now we project A, B, C, into A', B", C" on l" from center E, and thenA', B", C" into A', B', C' as in the first case. Finally, let ABC, A'B'C'be as given in the theorem. Let A" be a point not on ABC and not onA'B'C': one has to prove that such a point exists-we will not write outthe proof, but one should think the proof through and see what axioms
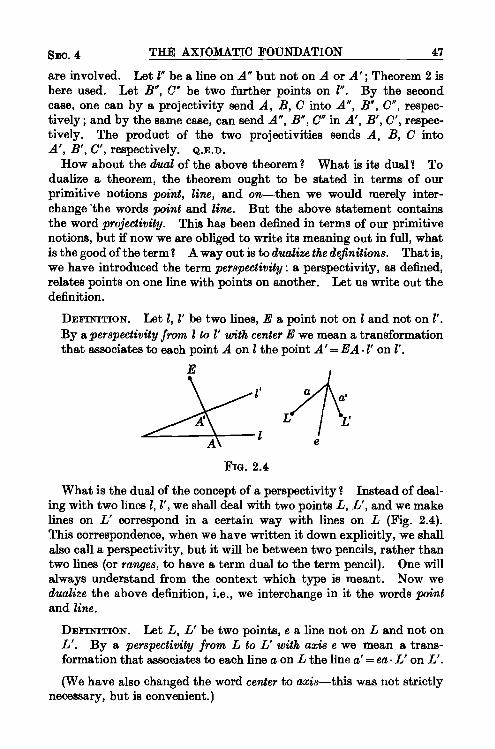
`C'
":dQ
P.a'
0(D
"'a
.,.
ti'
t".
._c
Rim
R-.
SEC. 4 THE AXIOMATIC FOUNDATION 47
are involved. Let l" be a line on A" but not on A or A'; Theorem 2 ishere used. Let B", C" be two further points on l". By the secondcase, one can by a projectivity send A, B, C into A", B", C", respec-tively ; and by the same case, can send A", B", C" in A', B', C', respec-tively. The product of the two projectivities sends A, B, C intoA', B', C', respectively. Q.E.D.
How about the dual of the above theorem? What is its dual? Todualize a theorem, the theorem ought to be stated in terms of ourprimitive notions point, line, and on-then we would merely inter-change'the words point and line. But the above statement containsthe word projectivity. This has been defined in terms of our primitivenotions, but if now we are obliged to write its meaning out in full, whatis the good of the term? Away out is to dualize the definitions. That is,we have introduced the term perspectivity : a perspectivity, as defined,relates points on one line with points on another. Let us write out thedefinition.
DEFINITION. Let 1, 1' be two lines, E a point not on l and not on l'.By a perspectivity from l to l' with center E we mean a transformationthat associates to each point A on l the point A'= EA l' on 1'.
E
FIG. 2.4
What is the dual of the concept of a perspectivity? Instead of deal-ing with two lines 1, l', we shall deal with two points L, L', and we makelines on L' correspond in a certain way with lines on L (Fig. 2.4).This correspondence, when we have written it down explicitly, we shallalso call a perspectivity, but it will be between two pencils, rather thantwo lines (or ranges, to have a term dual to the term pencil). One willalways understand from the context which type is meant. Now wedualize the above definition, i.e., we interchange in it the words pointand line.
DEFINITION. Let L, L' be two points, e a line not on L and not onL'. By a perspectivity from L to L' with axis e we mean a trans-formation that associates to each line a on L the line a' = ea L' on L'.
(We have also changed the word center to axis-this was not strictlynecessary, but is convenient.)
cue
coy-
p`4
E-+
48 LECTURES IN PROJECTIVE GEOMETRY CHAP. 2
These two definitions are duals of each other, and in dualizing wesimply replace the one definition by the other. In verbal statements,we have to change perspectivity to perspectivity, i.e., there is a realchange, but verbally there is none. The dual of our previous theoremnow reads as fgllows.
THEOREM. Given any three (distinct) concurrent lines a, b, c and anyother three (distinct) concurrent lines a', b', c'; then there exists a pro-jectivity sending a, b, c, respectively, into a', b', c'.
Exercises
1. The above theorem follows from the Principle of Duality. Prove thistheorem by dualizing, step by step, the proof of the dual theorem.
2. The complete 4-line or quadrilateral is dual to the complete 4-point orquadrangle. Write out the definition of a complete 4-line. Draw a figure.What is the diagonal triangle?
THEOREM. If there are at least n points on some line 1, then there areat least n points on any line 1'.
PROOF. Let E be a point not on l or l' (Theorem 2 is used), and
consider the perspectivity l E1'. By a lemma above, if A, B are
distinct points on 1, then EA and EB are distinct lines. Let these linescut l' in A', B', respectively. Since E' is not on 1', we have E O A',E # B'. Were A' = B', the lines EA, EB would have two points incommon, and that is not so ; so A' # B'. In short, to distinct points on1 there correspond by the perspectivity distinct points on 1'. Thereforeon l' there are at least n distinct points.
As we shall see shortly, it does not follow from the axioms that thereare necessarily infinitely many points on a line. The following theoremis quite sensible.
THEOREM. If there are at most n points on some line 1, then there areat most n points on any line 1'.
This theorem follows easily from the preceding one.Combining the two theorems we get the following.
THEOREM (P). If there are exactly n points on one line, then there areexactly n points on every line.
The dual of this theorem is the following.
THEOREM (Q). If there are exactly n lines on one point, then there areexactly n lines on every point.
Nam
8.5'
."5
td'
SEC. 5 THE AXIOMATIC FOUNDATION 49
In order not to confuse the n of Theorem (P) with the n of Theorem(Q) let us write :
THEOREM (Q'). If there are exactly m lines on one point, then there areexactly m lines on every point.
Theorem (Q') does follow by duality from Theorem (P), but theequality m=n does not follow by appeal to duality. The reason is thatTheorem (P) involves, in addition to our axioms, an extra assumption,namely, that there are exactly n points on some one line. The con-clusion drawn in Theorem (P) is not drawn from the axioms alone.
Although the equality m = n does not follow from duality, nonethe-less it is true that m = n. That is, the following is true.
THEOREM. If there are exactly n points on some (hence any) line,then there are exactly n lines on any point.
PROOF. Let l have on it exactly n points. Let P be a point not on 1.Distinct lines on P cut l in distinct points, and, conversely, if A, B aredistinct points on 1, then PA, PB are distinct lines on P. Thereforethere are exactly as many lines on P as points on 1, namely, n. By aprevious theorem, then, there are exactly n lines on any point.
THEOREM. If there are exactly n points on a line, then altogether thereare n2 - n + 1 points.
PROOF. Let P be a point ; every point Q is on a line through P.Consider the lines through P. On each such line there are, not countingP, n -1 points. There are n such lines, so, not counting P, there aren(n - 1) points. Counting P, we have n2 - n + 1 points.
Exercise. By the duality principle there are n2-n+1 lines (given thatsome line has on it exactly n points). Draw the same conclusion withoutappeal to duality.
5. Consistency of the axioms. As we said before, there are absolutelyno conditions on an axiom system, not even the condition that theaxioms be consistent. Of course, the moment we found an inconsis-tency, the system would lose all interest for us. But if a system wereactually inconsistent without our knowing it beforehand, the only waywe could detect the inconsistency would be to study the system, andthat means that we allow ourselves to study inconsistent systems.
Since, however, .inconsistent systems are not interesting, one usuallytries to pay some attention to this point at the very beginning. Thequestion here arises, How can one prove that a system of axioms is consis-tent? One way is to build a model of the system ; what this means wenow explain.

0 0
e`+
c_.
4))F
50 LECTURES IN PROJECTIVE GEOMETRY CH" 2To build a model of our axiom system (Axioms 0 to 5) means to
specify certain objects as points, certain objects as lines, to specify ameaning for on, and to do this in such manner that the axioms becomeverifiable theorems. This will become clearer if we actually constructa model.
Take seven objects, any objects whatsoever-a tree, a book, a dream,etc., any seven different things-and designate them A, B, C, D, E, F, G.These objects we will call points : note that now, in building the model,point is not undefined-a point is one of the objects A, , G. By lineswe will mean certain triplets of points, namely, the triplets of points inthe columns of the following array.
A A A B B C CB D F D E D EC E G F G G F.
Thus the set {A, B, C} is specified to be a line, likewise {C, D, G}, andthere are five others. By on we will mean is a .,ember of : thus C is amember of {C, B, F}, and we shall say that C is on the line {C, E, F}.
We now try to prove the statements 0 to 5 which we previously called(and in the future shall still call) axioms. In trying to build a model,we want the axioms to become true and proved theorems.
PROOF OF 0. A is a point, and {A, B, C} is a line, so 0 is checked.
PROOF OF 1. We list all pairs of points. Before doing so, we askhow many pairs there are ; in this way, we get a check on the list. Wecan pick a point in 7 ways, and a second point then in 6 ways, so alto-gether, there are 7.6 = 42 pairs if we insist on order, i.e., regard AB asdifferent from BA. If we do not care about the order, and for presentpurposes that is the case, there are 7.62 = 21 pairs. Now list them.They are :
AB, AC, AD, AE, AF, AG,BC, BD, BE, BF, BG,
CD, CE, CF, CG,DE, DF, DG,
EF, EG,FG.
For each of these pairs we examine the preceding array to see whethersome column contains the pair. Each of the 21 trials turns out to besuccessful. This proves 1.
PROOF OF 2. Here we could check that each of the above pairsoccurs in just one column. We have to do this in one way or another
k...
p`r
CS.
p`9
',v
..j
.^r
::.
S."
mo.
+°'
cm.
-.3
c0.
C/1Sxc. 6 THE AXIOMATIC FOUNDATION 51
and could do it by a direct enumeration of cases. But that would beinelegant. Here is a typical kind of argument which occurs in suchproblems. We have to see that if X, Y are two letters, then X Y doesnot occur in more than one column ; by 1, it occurs in at least onecolumn. Suppose we were to write down all the pairs occurring in agiven column. Since there are 3 letters in a column, we would bewriting down 3 pairs (3 = 3.22). There are 7 columns, so we would bewriting down 7.3 = 21 pairs. The question is : would we have writtendown any pair twice or more? By 1 we know that we would be writingdown at least 21 distinct pairs, and since we would have written downonly 21 pairs in any event, there could be no duplication.
PROOF OF 3. We have to check that every two columns contain aletter in common. There are 21 details to check.
PROOF OF 4. Check that no letter occurs twice in the same column.(This, incidentally, we know already from the argument given for 2.)
PROOF OF 5. There are only 3 points on a line, and there are 7 points,so they could not all be on one line.
The existence of the above model shows that our axiom system is con-sistent : because if we could deduce a contradiction from the axioms,then we could also deduce a contradiction from the existence of 7 dis-tinct objects, namely, by forming them into a model as above anddrawing the contradiction in the model. (If the existence of 7 objectsinvolves a contradiction, then there do not exist 7 objects. We willnot attempt to prove that there do exist 7 objects, and, to this extent,the consistency proof is incomplete.)
Exercise. Show that the diagonal points of any complete quadrangle inthe 7-point plane are collinear.
6. Other models. How was the above model come upon? IfAxiom 5 was to be satisfied, then at least three points would be on anyline. Using the principle that we do not introduce into considerationmore than we have to, we try to find a model with just three points oneach line. By a theorem, there would have to be 32 - 3 + 1= 7 pointsaltogether. So if a model with just 3 points on each line could beconstructed at all, there would have to be 7 points. On any point,say A, by a theorem, there would have to be 3 lines, and on each ofthese, 2 points besides A. So 3 lines must be (except for notation)
A A AB D FC E G
Now on B there must be 2 other lines : BDF is a possibility, as is BDG,but these two possibilities differ only in notation, nothing else. Take,
'CD
coo
mss "T
1
040
'ca
4)).m
ot'
52. LECTURES IN PROJECTIVE GEOMETRY CHAP. 2
say, BDF. This leaves BEG as the other possibility for a line on B.On C and D there must be a line, and one sees that the third point couldonly be G, i.e., CDG must be a line. Similarly CEF must be a line. Bythis time there are 7 lines. If a model (with 3 points on each line) couldbe built at all, there would be exactly 7 lines (by a theorem). So thelines must be, except for notation, ABC, ADE, etc. That is, nothingelse would do, but it still remained to show that the above does yield amodel.
Exercises
1. Try to find a model with just 4 points on each line. (The word "try" isused, because nothing guarantees beforehand that any such model exists.But it does.)
2. Using familiar facts from solid geometry, show that the following yieldsa model of our system : first fix a point 0 in space ; by a "point" shall bemeant a line (ordinary space line) through the point 0; by a "line" shall bemeant a plane through 0; a "point" P shall be said to be on a "line" l if theline P is on the plane 1.
3. Show that no 7 points of a 13-point plane (4 points per line) can form a7-point plane. (Of course, three points A, B, C are to be called collinear inthe proposed 7-point plane if and only if they are collinear in the 13-pointplane.) Hence conclude that the diagonal points of any complete 4-pointin the 13-point plane are not collinear.
Starting from the Euclidean plane, we can construct a model of theprojective plane (i.e., of the above axiom system) by the adjunction ofideal points, as in the first part of the book. Although this really yieldsa model, this model is not as satisfactory for the purpose of showing con-sistency as the 7-point geometry, because in the present case the consis-tency would be made to depend upon that of Euclidean geometry,whereas above the consistency was made to depend only on the exis-tence of 7 objects. We might, of course, lay down axioms for the affineplane and see that we would get a projective plane by the adjunction ofideal points. Let us do this.
AXIOMS FOR AN AFFINE PLANE.
AO. There exist at least one point and at least one line.Al. On any two points there is at least one line.A2. On any two points there is at most one line.A3. If l is a line and P a point not on 1, then there is one and only one
line l' on P that does not intersect 1. (We may call this the ParallelPostulate.)
A4. There are at least two points on every line.A5. Not all points are on the same line.
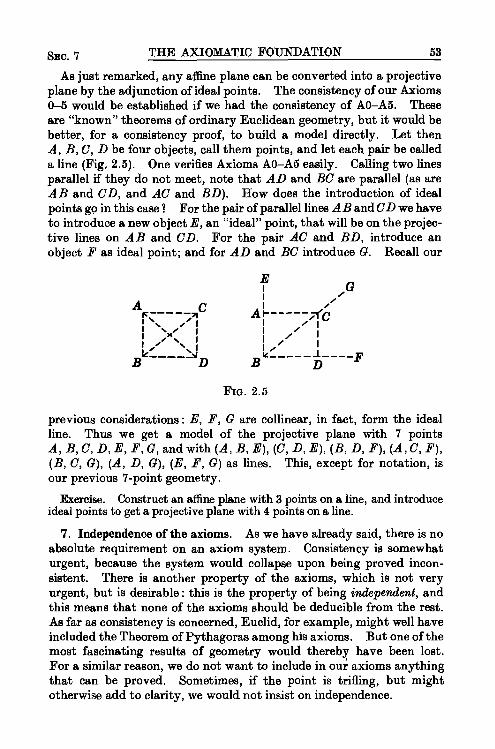
gyp'
I1+
SUE
Sxc. 7 THE AXIOMATIC FOUNDATION 53
As just remarked, any affine plane can be converted into a projectiveplane by the adjunction of ideal points. The consistency of our Axioms0-5 would be established if we had the consistency of A0-A5. Theseare "known" theorems of ordinary Euclidean geometry, but it would bebetter, for a consistency proof, to build a model directly. Let thenA, B, C, D be four objects, call them points, and let each pair be calleda line (Fig. 2.5). One verifies Axioms AO-A5 easily. Calling two linesparallel if they do not meet, note that AD and BC are parallel (as areAB and CD, and AC and BD). How does the introduction of idealpoints go in this case? For the pair of parallel lines AB and CD we haveto introduce a new object E, an "ideal" point, that will be on the projec-tive lines on AB and CD. For the pair AC and BD, introduce anobject F as ideal point; and for AD and BC introduce G. Recall our
E /GA C I .'
i I I / I
D
FIG. 2.5
previous considerations : E, F, G are collinear, in fact, form the idealline. Thus we get a model of the projective plane with 7 pointsA, B, C, D, E, F, G, and with (A, B, E), (C, D, E), (B, D, F), (A, C, F),(B, C, G), (A, D, G), (E, F, G) as lines. This, except for notation, isour previous 7-point geometry.
Exercise. Construct an affine plane with 3 points on a line, and introduceideal points to get a projective plane with 4 points on a line.
7. Independence of the axioms. As we have already said, there is noabsolute requirement on an axiom system. Consistency is somewhaturgent, because the system would collapse upon being proved incon-sistent. There is another property of the axioms, which is not veryurgent, but is desirable : this is the property of being independent, andthis means that none of the axioms should be deducible from the rest.As far as consistency is concerned, Euclid, for example, might well haveincluded the Theorem of Pythagoras among his axioms. But one of themost fascinating results of geometry would thereby have been lost.For a similar reason, we do not want to include in our axioms anythingthat can be proved. Sometimes, if the point is trifling, but mightotherwise add to clarity, we would not insist on independence.
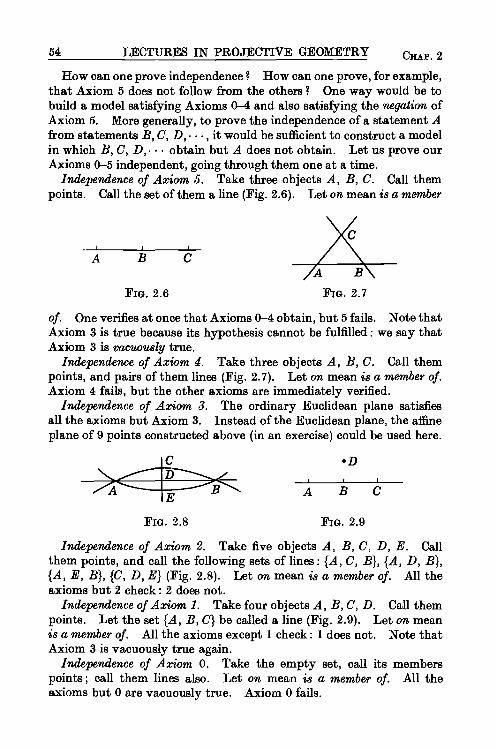
cue
c1'
-ID
Off,, "O
y
Ado
cadC
4.
7;4
54 LECTURES IN PROJECTIVE GEOMETRY CHAP. 2
How can one prove independence? How can one prove, for example,that Axiom 5 does not follow from the others? One way would be tobuild a model satisfying Axioms 0-4 and also satisfying the negation ofAxiom 5. More generally, to prove the independence of a statement Afrom statements B, C, D, , it would be sufficient to construct a modelin which B, C, D, obtain but A does not obtain. Let us prove ourAxioms 0-5 independent, going through them one at a time.
Independence of Axiom 5. Take three objects A, B, C. Call thempoints. Call the set of them a line (Fig. 2.6). Let on mean is a member
A B C
FIG. 2.6
of. One verifies at once that Axioms 0-4 obtain, but 5 fails. Note thatAxiom 3 is true because its hypothesis cannot be fulfilled : we say thatAxiom 3 is vacuously true.
Independence of Axiom 4. Take three objects A, B, C. Call thempoints, and pairs of them lines (Fig. 2.7). Let on mean is a member of.Axiom 4 fails, but the other axioms are immediately verified.
Independence of Axiom 3. The ordinary Euclidean plane satisfiesall the axioms but Axiom 3. Instead of the Euclidean plane, the affineplane of 9 points constructed above (in an exercise) could be used here.
C DA A B C
FIG. 2.8 FIG. 2.9
Independence of Axiom 2. Take five objects A, B, C, D, E. Callthem points, and call the following sets of lines : {A, C, B}, {A, D, B},{A, E, B}, {C, D, E} (Fig. 2.8). Let on mean is a member of. All theaxioms but 2 check : 2 does not.
Independence of Axiom 1. Take four objects A, B, C, D. Call thempoints. Let the set {A, B, C} be called a line (Fig. 2.9). Let on meanis a member of. All the axioms except 1 check : 1 does not. Note thatAxiom 3 is vacuously true again.
Independence of Axiom 0. Take the empty set, call its memberspoints ; call them lines also. Let on mean is a member of. All theaxioms but 0 are vacuously true. Axiom 0 fails.

p'+
... t.
7
CO
O
0G4
`4.
I'd'-'
cue
0°.
,..,,
p.,
ear
f3+
'.'p'
+
G/-
,Ic
y
,ti
4'i
Off,
r0,s0°.
SEC. 8 THE AXIOMATIC FOUNDATION 55
If the axiom system is sufficiently simple, checking the independ-ence of each axiom from the others is desirable. In more complicatedsituations one will merely guard against adding as an axiom somethingthat can be proved on the basis of the axioms already laid down.
Exercises
1. Split Axiom 0 into two axioms :Axiom 0'. There is at least one point.Axiom 0". There is at least one line.
Prove that Axioms 0', 0", 1, 2, 3, 4, 5 are not independent.2. Find all the models satisfying Axioms 0, 1, 2, 3, 5, but for which
Axiom 4 fails.3. Show that the following Axiom 4* can replace Axioms 0, 4, and 5.
Axiom 4* : There exist four points, no three of which are collinear.
8. Isomorphism. An axiom system consists of several sets Sl, S2,of undefined objects together with undefined relations R1, B2,between them (plus axioms). For example, the axiom system we havebeen studying consists of two sets of objects Si, S2, one set called points,the other lines, together with the relation incidence-for later purposeswe refer to such a system as a system of type E. Let .9' be a systemmade up from sets Si, S2, through relations Rl, B2, ; let 8' beanother system made up from sets Si', S2', through relationsBill B2', : we say .9' and Y' are isomorphic if there is a one-to-onecorrespondence of Sl with Si', of S2 with S2', etc., in such a way that arelation Ri holds between certain elements of Si, S2, if and only ifRi' holds between the corresponding elements of Sl', S2', .. Forexample, two systems of type E are isomorphic if the points and linesof one system are put in one-to-one correspondence, respectively, withthe points and lines of the other in such way that a point and line of thefirst system are incident if and only if the corresponding point and lineof the second system are incident.
Roughly speaking, two systems are isomorphic if they look alike,although made up of different materials.
THEOREM. Any two 7-point geometries are isomorphic.
PROOF. This follows from our previous considerations as a result ofthe fact that there is at any stage essentially only one way to proceed inconverting seven objects into a geometry. In writing down a detailedproof, though, we will follow a different idea. Let then A, B, C be anythree noncollinear points in the first plane; let A', B', C' be any threenoncollinear points in the second plane. On BC there is a third point-call it D ; on B'C' there is a third point-call it Y. Similarly, let E beon CA ; E' on C'A' ; F on AB ; F' on A'B'. Finally there is a seventh
orb
56 LECTURES IN PROJECTIVE GEOMETRY CHAP. 2
point G in the first plane and a seventh point G' in the second. Thelines of the first plane are {A, B, F), {A, G, D), etc. ; the lines of thesecond are {A', B', F'}, {A', G', D'}, etc. Then associating A with A', Bwith B', etc; and {A, B, F) with {A', B', F'}, {A, G, D} with {A', G', D'},etc. we have an isomorphism.
REaunK. The above theorem is frequently expressed by saying thatthere is only one 7-point geometry, but what is meant is that there isonly one up to form, and this last point is tacit.
Exercises
1. If 7r1 and trg are two isomorphic systems of type E and one is a plane(i.e., satisfies our axioms), then so is the other.
2. Let .9' be a system of type E. Define another system .9' of type E asfollows : the points of .9i' are just the points of Y ; a line l' of .9' consists ofthe set of points on a given line l of Y; incidence in So' is defined throughmembership. Show that .9' and Y' are isomorphic.
9. Further axioms. The above axioms (Axioms 0-5, p. 43) are calledthe axioms of alignment. For sake of explicitness it may be well todefine a projective plans.
DnmITTON. A projective plane is the composite notion of two non-empty sets, the members of one of which are called points, those of theother lines, and a relation on between points and lines for which theaxioms of alignment are verified.
But we are going to add further axioms to our system. If the theoremof Desargues holds in a projective plane, whether deduced or by assump-tion, we will call the plane Desarguesian. Similarly if Pappus' Theoremholds, we will call the plane Pappian. If the Fundamental Theoremholds, we will speak of the classical projective plane. Note that allthree of these theorems can be stated in any projective plane : whetherthey are true is another matter.
It is difficult to do much on the basis of the axioms of alignmentalone. There are some combinatorial theorems of the type alreadymentioned, but there is relatively little scope for further geometricaldevelopment. Here is a theorem that follows from the axioms ofalignment alone.
TnEoxx. If A, B, C, D are four collinear points, then there exists aprO ectivity sending A into B, B into A, C into D, and D into C.
moor. Let l bea line on A, l # AB (Fig. 2.10). Let D" be not on 1"
and not on AB. Let ABCD AB'C'D', where B', C', D' are on 1.
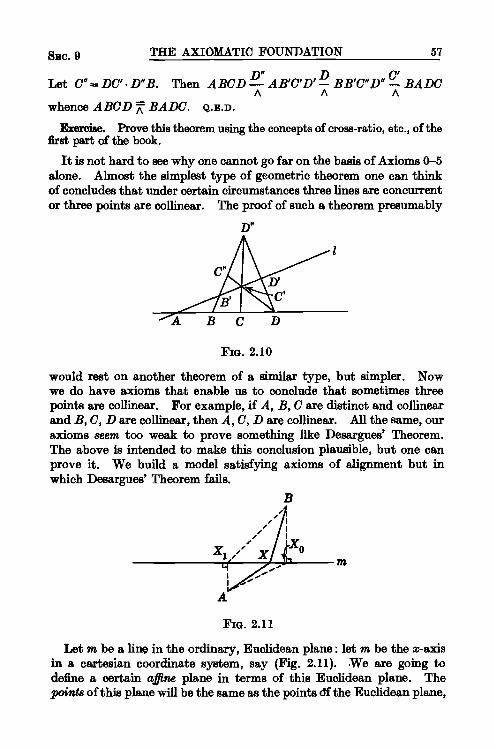
0-m
coo
8310. 9 THE AXIOMATIC FOUNDATION 57
Let C" = DC' D"B. Then ABCD D" AB'C'D' D BB'C"D"C'
BADCA A n
whence ABCD BADC. Q.E.D.
Exercise. Prove this theorem using the concepts of cross-ratio, etc., of thefirst part of the book.
It is not hard to see why one cannot go far on the basis of Axioms 0-5alone. Almost the simplest type of geometric theorem one can thinkof concludes that under certain circumstances three lines are concurrentor three points are collinear. The proof of such a theorem presumably
D"
Fia. 2.10
would rest on another theorem of a similar type, but simpler. Nowwe do have axioms that enable us to conclude that sometimes threepoints are collinear. For example, if A, B, C are distinct and collinearand B, C, D are collinear, then A, C, D are collinear. All the same, ouraxioms seem too weak to prove something like Desargues' Theorem.The above is intended to make this conclusion plausible, but one canprove it. We build a model satisfying axioms of alignment but inwhich Desargues' Theorem fails.
m
Fia. 2.11
Let m be a line in the ordinary, Euclidean plane : let m be the x-axisin a cartesian coordinate system, say (Fig. 2.11). We are going todefine a certain affine plane in terms of this Euclidean plane. Thepoints of this plane will be the same as the points df the Euclidean plane,
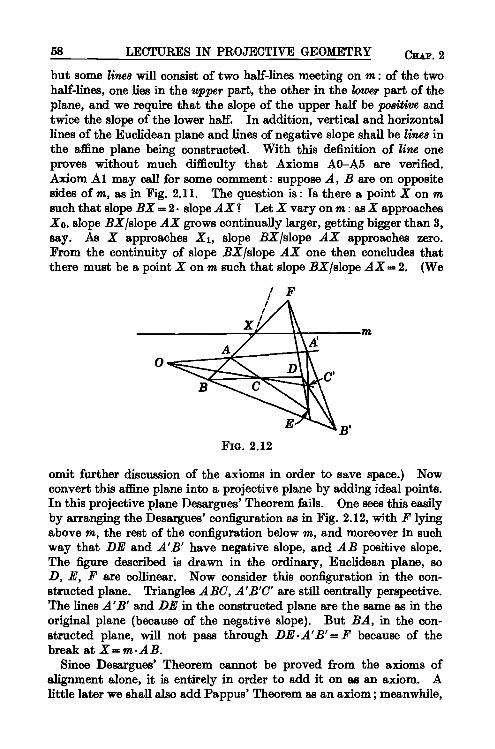
LT'
map
-v.
"S,
nor:
ear
o4)
ate.,
58 LECTURES IN PROJECTIVE GEOMETRY CHAP 2
but some lines will consist of two half-lines meeting on m : of the twohalf-lines, one lies in the upper part, the other in the lower part of theplane, and we require that the slope of the upper half be positive andtwice the slope of the lower half. In addition, vertical and horizontallines of the Euclidean plane and lines of negative slope shall be lines inthe affine plane being constructed. With this definition of line oneproves without much difficulty that Axioms AOA5 are verified.Axiom Al may call for some comment : suppose A, B are on oppositesides of m, as in Fig. 2.11. The question is : Is there a point X on msuch that slope BX = 2. slope AX ? Let X vary on m : as X approachesXo, slope BX/slope AX grows continually larger, getting bigger than 3,say. As X approaches X 1, slope BX/slope AX approaches zero.From the continuity of slope BX/slope AX one then concludes thatthere must be a point X on m such that slope BX/slope AX = 2. (We
FIG. 2.12
omit further discussion of the axioms in order to save space.) Nowconvert this affine plane into a projective plane by adding ideal points.In this projective plane Desargues' Theorem fails. One sees this easilyby arranging the Desargues' configuration as in Fig. 2.12, with F lyingabove m, the rest of the configuration below m, and moreover in suchway that DE and A'B' have negative slope, and AB positive slope.The figure described is drawn in the ordinary, Euclidean plane, soD, E, F are collinear. Now consider this configuration in the con-structed plane. Triangles ABC, A'B'C' are still centrally perspective.The lines A'B' and DE in the constructed plane are the same as in theoriginal plane (because of the negative slope). But BA, in the con-structed plane, will not pass through DE A'B'=.F because of thebreak at X = m AB.
Since Desargues' Theorem cannot be proved from the axioms ofalignment alone, it is entirely in order to add it on as an axiom. Alittle later we shall also add Pappus' Theorem as an axiom ; meanwhile,
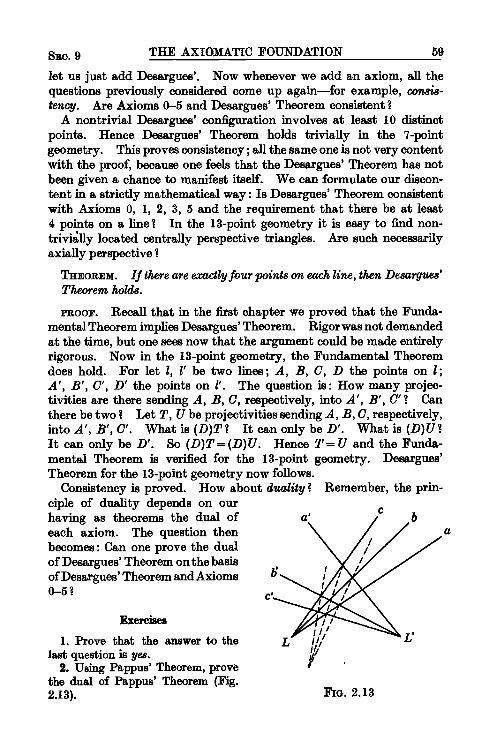
.^r
...
coo
e+°
M+
.
R_.
^U'
cod
4-i
'L'
9=H
11_4°
+3'
m°°
Sxc. 9 THE AXIOMATIC FOUNDATION 59
let us just add Desargues'. Now whenever we add an axiom, all thequestions previously considered come up again-for example, consis-tency. Are Axioms 0-5 and Desargues' Theorem consistent?
A nontrivial Desargues' configuration involves at least 10 distinctpoints. Hence Desargues' Theorem holds trivially in the 7-pointgeometry. This proves consistency ; all the same one is not very contentwith the proof, because one feels that the Desargues' Theorem has notbeen given a chance to manifest itself. We can formulate our discon-tent in a strictly mathematical way : Is Desargues' Theorem consistentwith Axioms 0, 1, 2, 3, 5 and the requirement that there be at least4 points on a line? In the 13-point geometry it is easy to find non-trivially located centrally perspective triangles. Are such necessarilyaxially perspective?
THEOREM. If there are exactly four points on each line, then Desargues'Theorem holds.
PROOF. Recall that in the first chapter we proved that the Funda-mental Theorem implies Desargues' Theorem. Rigor was not demandedat the time, but one sees now that the argument could be made entirelyrigorous. Now in the 13-point geometry, the Fundamental Theoremdoes hold. For let 1, 1' be two lines ; A, B, C, D the points on 1;A', B', C', D' the points on 1'. The question is : How many projec-tivities are there sending A, B, C, respectively, into A', B', C' V Canthere be two ? Let T, U be projectivities sending A, B, C, respectively,into A', B', C'. What is (D)T? It can only be D'. What is (D)U?It can only be D'. So(D)T=(D)U. Hence T= U and the Funda-mental Theorem is verified for the 13-point geometry. Desargues'Theorem for the 13-point geometry now follows.
Consistency is proved. How about duality? Remember, the prin-ciple of duality depends on ourhaving as theorems the dual ofeach axiom. The question thenbecomes : Can one prove the dualof Desargues' Theorem on the basisof Desargues' Theorem and Axioms0-5?
Exercises
1. Prove that the answer to thelast question is yes.
2. Using Pappus' Theorem, provethe dual of Pappus' Theorem (Fig.2.13). Pta. 2.13
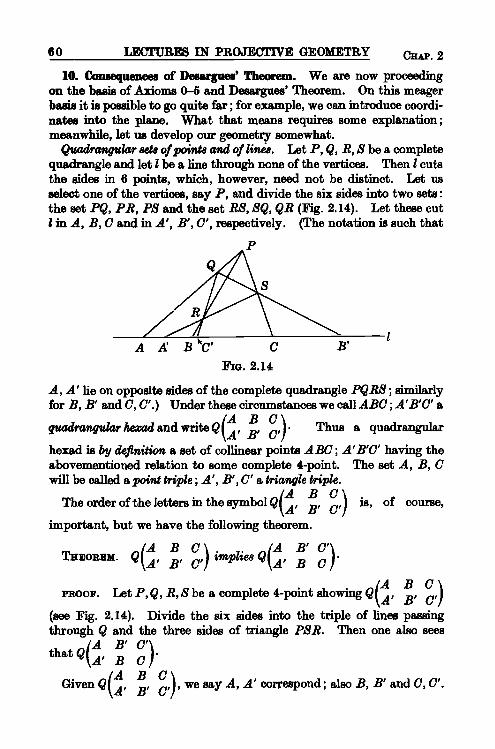
a.,
60 LECTURES IN PROJECTIVE GEOMETRY Case. 2
10. Consequences of Desargues' Theorem. We are now proceedingon the basis of Axioms 0-5 and Desargues' Theorem. On this meagerbasis it is possible to go quite far; for example, we can introduce coordi-nates into the plane. What that means requires some explanation ;meanwhile, let us develop our geometry somewhat.
Quadrangular sets of points and of lines. Let P, Q, R, S be a completequadrangle and let l be a line through none of the vertices. Then d cutsthe sides in 6 points, which, however, need not be distinct. Let usselect one of the vertices, say P, and divide the six sides into two sets :the set PQ, PR, PS and the set RS, SQ, QR (Fig. 2.14). Let these outl in A, B, C and in A', B', C', respectively. (The notation is such that
A A B 'C' C B'
Fix. 2.14
A, A' lie on opposite sides of the complete quadrangle PQRS ; similarlyfor B, B' and C, C'.) Under these circumstances we call ABC ; A'B'C' &
quadrangular hexad and write Q (A, B, c,) . Thus a quadrangular
hexad is by definition a set of collinear points ABC; A'B'C' having theabovementioned relation to some complete 4-point. The set A, B, Cwill be called a point triple ; A', B', C' a triangle triple.
The order of the letters in the symbol Q(A' B' C') is, of course,
important, but we have the following theorem.
Tmcoxxns. Q(AA
' B' C') implies Q(AA B'
' B Cmtoor. Let P, Q, R, S be a complete 4-point showing Q(A'
B, C')(see Fig. 2.14). Divide the six sides into the triple of lines passingthrough Q and the three sides of triangle PSR. Then one also sees
A B' 0'that Q (A ' B 0)
A BGiven
CQ(A' B'
C')' we say A, A' correspond ; also B, B' and C, C.

4'g
°"p
per'
on-
0'I
E-+
Fl-
0.'i
SEC. 10 THE AXIOMATIC FOUNDATION 61
THEOREM. Given QI A'BB
' C')' Then A, B, C are distinct;
A', B', C' are distinct; if a point of the point triple is the same as a pointof the triangle triple, then they correspond (i.e., for example, A = B' isimpossible, as is A=C').
PROOF. From the definition of a complete 4-point, no 3 vertices arecollinear. So PQ :A PR ; for the same reason PQ, PR, PS are distinct.Since l does not pass through P, the points A, B, C are distinct. Simi-
larly, A', B', C' are distinct. Since Q A' B C )' we see that A= B'
is impossible, as is A =C'.This theorem tells us that in a quadrangular set of points certain of
them are unequal. We will refer to the inequalities given by the lasttheorem as the necessary inequalities on quadrangular hexads.
THEOREM. Given five collinear points A, B, C, A', B'. Then there
exists a point C' such that Q(A,B,
C')' provided A, B, C, A', B'satisfy the necessary inequalities (namely, A 0 B, A # C, B o C, A'* B,A'96C, B'# A, B'#C).
PROOF. Take any point P not on 1. Through A' take a line(# A'P, # 1) cutting PB, PC in R, S, respectively. Let Q = PA B'S.Then C' =QR l is a desired point C'.
REMARK. If Q (A' B' '), then BB'CA' n BB'AC'.
PROOF. Consider 1S
m Q 1, where l = AB, m = PB (see Fig. 2.14).
THEOREM. With hypotheses of last theorem, there is only one point C'
such thatQ(A'B' C').
PROOF. One has to go through the construction given in the proof ofthe last theorem twice and see that one comes both times to the samepoint C'. Take any point P not on 1. Through A' take a line(0 A'P, 9& 1) cutting PB, PC in R, S, respectively. Let Q = .PA B'S,and C' =QR 1 (Fig. 2.15). We have to see that 0'=0'.
Suppose, now, in order to see the main point of the proof, that thereis nothing special about the configuration in question, for example,we do not have R = R. Then we have to show that QRS and QRS areaxially perspective. To do this, it would be sufficient to show that theyare centrally perspective, i.e., that QQ, RR, 89 are concurrent. Since
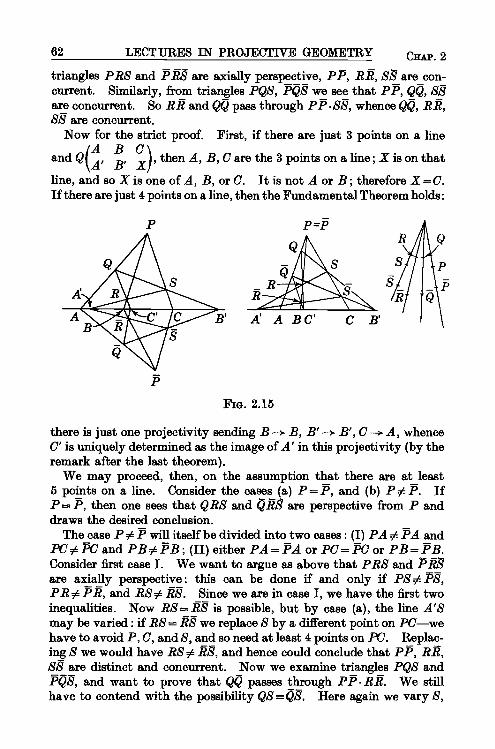
...m
See
8.4
lam
,+o
HM
I
'IQ
coo
coo
'ti
sirI0.
;caIII
45aM
0.;
0!;5
Its
slaw
62 LECTURES IN PROJECTIVE GEOMETRY CHAP. 2
triangles PBS and PRE are axially perspective, PP, RR, SS are con-current. Similarly, from triangles PQS, PQS we see that PP, QQ, SSare concurrent. So BR and QQ pass through PP SS, whence QQ, BR,SS are concurrent.
Now for the strict proof. First, if there are just 3 points on a line
and Q(A, B, X), then A, B, C are the 3 points on a line ; X is on that
line, and so X isone
of A, B, or C. It is not A or B ; therefore X =C.If there are just 4 points on a line, then the Fundamental Theorem holds:
P
P=P
A' A B C'
Fm. 2.15
C B'
there is just one projectivity sending B --->- B, B'---> B', C -> A, whenceC' is uniquely determined as the image of A' in this projectivity (by theremark after the last theorem).
We may proceed, then, on the assumption that there are at least5 points on a line. Consider the cases (a) P = P, and (b) P P. IfP=P, then one sees that QRS and QRS are perspective from P anddraws the desired conclusion.
The case P VzP will itself be divided into two cases : (I) PA O PA andP C O PC and PB PB ; (II) either PA = PA or PC =P0 or PB = PB.Consider first case I. We want to argue as above that PRS and PRSare axially perspective : this can be done if and only if PS PS,PR 96PR, and RS ORS. Since we are in case I, we have the first twoinequalities. Now RS=RS is possible, but by case (a), the line A'Smay be varied : if RS = RS we replace S by a different point on PC-wehave to avoid P, C, and S, and so need at least 4 points on PC. Replac-ing S we would have RS 96 RS, and hence could conclude that PP, RR,SS are distinct and concurrent. Now we examine triangles PQS andPQS, and want to prove that QQ passes through PP BR. We stillhave to contend with the possibility QS=QS. Here again we vary S,
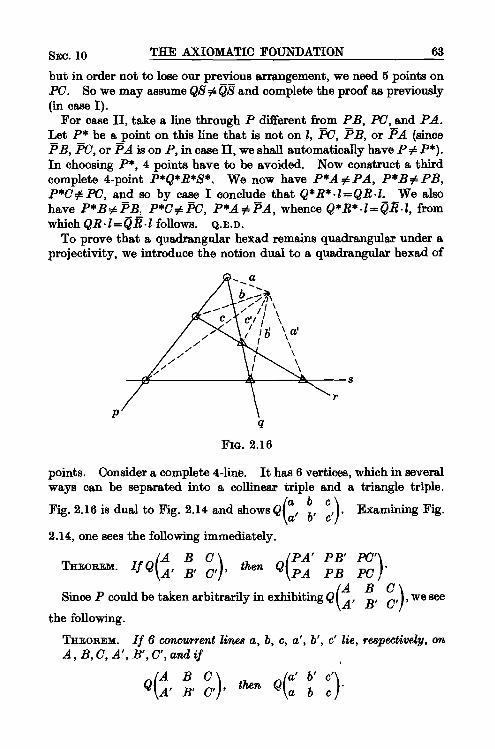
°.c
aim
'b'
SEa. 10 THE AXIOMATIC FOUNDATION 63
but in order not to lose our previous arrangement, we need 5 points onPC. So we may assume QS QS and complete the proof as previously(in case I).
For case II, take a line through P different from PB, PC, and PA.Let P* be a point on this line that is not on 1, PC, PB, or PA (sincePB, PC, or PA is on P, in case II, we shall automatically have P 0 P*).In choosing P*, 4 points have to be avoided. Now construct a thirdcomplete 4-point P*Q*R*S*. We now have P*A 0 PA, P*B # PB,P*C 0 PC, and so by case I conclude that Q*R* l =QR 1. We alsohave P*B 0 PB, P*C O PC, P*A PA, whence Q*R* l = Q.ll 1, fromwhichQB-l=QR.l follows. Q.E.D.
To prove that a quadrangular hexad remains quadrangular under aprojectivity, we introduce the notion dual to a quadrangular hexad of
q
FIG. 2.16
points. Consider a complete 4-line. It has 6 vertices, which in severalways can be separated into a collinear /triple and a triangle triple.
Fig. 2.16 is dual to Fig. 2.14 and shows QIa' b'cExamining Fig.
2.14, one sees the following immediately. \
CTHEOREM. If Q(A4' B' Gc')' then
Q(PPA' PB' PC,.
A PB PC )
Since P could be `taken arbitrarily in exhibiting Q(A' B, C,), we see
the following.
THEOREM. If 6 concurrent lines a, b, c, a', b', c' lie, respectively, onA, B, C, A', B', C', and if
A B Cthen Q
a' b' c'Q(A' B' C')' (a b c )-
IQ"
64 LECTURES IN PROJECTIVE GEOMETRY CHAP. 2
The dual of this, the following theorem, is also true.
THEOREM. 1/6 concurrent lines a, b, c, a', b', c' are out by a secant inA, B, 0, A', B', C', respectively, and if
a b c A' B' C'Q(a b, c') ' then Q(A B CJ-
Combining these two theorems we can prove the following.
THEOREM. If ABCA'B'C' A ABCA'B'C' and if
Q(A' B' C,)' then Q(A' B'C') .
PROOF. We need only /consider a perspectivity. So suppose
ABCA'B'C'E ABCA'$'C' and let a = EA, b = EB, etc. Then
A B C a' b' c'Q(A' B, C)
implies Q(ab c),
by the first of the last two theorems; and the second now implies
Q(A, B' Cc-') Q.E.D.
Recall how, in an earlier part of the book, we proved that ABCDA'B'C'D' and H(A, B ; C, D) imply H(A', B'; C', D'). We gave twoproofs. One used space and regarded the given perspectivity as asection of a projection. The configuration showing H(A, B ; C, D) thenprojected into a figure showing H(A', B'; C', D'). If we had spaceavailable, we could give the same proof for quadrangular hexads : aquadrangle showing
Q (A' B' C) would go into one showing Q(A'B, C')
We do not have space, but the idea of that proof can be used. Weconsider transformations of the plane into itself that send collinearpoints into collinear points. Such transformations are called collinea-tions. If distinct points go into distinct points, then the collineation iscalled nonsingular. Suppose, now, it were possible to regard a givenperspectivity as part of some nonsingular collineation ; i.e., given aperspectivity T : 1 n l', suppose there were a coffineation U such that(X)T= (X) U for the points X on 1. Then U would transform a 4-point
showingQ(-A4,
B, CC, { (where A, B, are on 1) into a 4-point showing
..,
C`-
....m
y
°m°
"a'
9L0
....~
.m
oo'
.°°
off.
mom
...y
C.'
+'A
`'"P.4
boygyp.
aopOO
aim.C
I
ti4.:9
'r,
Sxc. 11 THE AXIOMATIC FOUNDATION 65
Q(A, B,C) ( w h e r e A = (A)T, B = (B)T, ). We leave the proof
that U does exist as an exercise.
Exercise. Let E be a point and q a line not on E. Define a transformationof the (points and lines of the) plane as follows : E goes into E, every point ofq goes into itself, every other point A goes into A' with H(A, A'; E, EA q) ;q goes into q, every line l on E goes into itself, every other line l goes into l' withH(l, I'; q, (q 1) E). Show that this transformation is an isomorphism of theplane with itself.
11. Free planes. Previously we remarked that the axioms of align-ment seem too weak to prove something like Desargues' Theorem. Inwhat follows we bring this feeling to rigorous expression and show thatit is correct.
By a partial plane one means the composite notion of a set of objectscalled points, a set of objects called lines, and a relation on betweenpoints and lines satisfying the following axiom :
Axzox. On any two (distinct) points there is at most one line.
For partial planes the theorem holds that on any two lines there is atmost one (common) point.
Any set of points together with any set of lines of a given projectiveplane, along with the notion on of the projective plane, furnishes anexample of a partial plane.
By a finite partial plane one means a partial plane involving only afinite set of points and lines. A finite partial plane is also called aconfiguration.
A configuration is said to be confined if, in the configuration, there areat least three points on every line and at least three lines on every point.Roughly speaking, every theorem, or at any rate every theorem whichconcludes that some three points are collinear or some three lines areconcurrent, must involve a confined configuration ; for if in the con-figuration, there is a line on which there are only two points, the factthat this line is in the configuration does not tell us much, and so mightbe deleted from the configuration ; similarly with any point on whichthere are at most two lines. The last two sentences need not be scruti-nized for rigor, but one should check that the various theorems we havehad, such as Desargues' Theorem, or Pappus' Theorem, or the theoremon the uniqueness of the fourth harmonic, do involve confined con-figurations.
Starting from a given partial plane vro, we construct a partial plane Trlas follows : for each pair of points in Tro on which there is no line weintroduce a new object, whch we will call a line, and we will say that
-'r-,
+
'F'
`JO
`"'
pp'
c+-
...`r
3p,
,.+
.i1
.
CS'
Ks'
CS'
~`'
o-'
cab
't1
I'dQ
,.
[t'
«°,
'Z1
C,'
9'-o...
car)
^t1
p°.>
=1
"P4A
CA
..,f."
't}
t".
...C
.'
.'~
c°,
C."
,cacam
C/1
P04 401
66 LECTURES IN PROJECTIVE GEOMETRY CsA . 2
this line is on the two points ; i.e., we define a new partial plane bykeeping the points and lines of iro together with the incidence relationsof iro, but we enrich pro with new lines and new incidence relations. Of7rl we can say : (a) on any two points there is at least one line. Nowstarting from 7rl, we construct a partial plane 1r2 as follows : for eachpair of lines in 7rj on which there is no (common) point we introduce anew object, which we shall call a point, and we will say that this point ison the two lines. Of a2 we can say : (b) on any two lines there is atleast one point. The partial plane 1r2i however, may not satisfy (a) :so we proceed to patch it up by constructing Tr3 from IN just as we con-structed irl from iro. Then 1r3 satisfies (a) ; but (b) may be destroyed.So we patch 1r3 up, by constructing its from its just as we did ir2 from ?ri.And so we go, successively constructing 7ri, it, 7r3, 14i . Each ,r{with an odd subscript satisfies (a) ; each ir{ with an even subscriptsatisfies (b). Let, now, it be the partial plane defined as follows : thepoints and lines of a shall be the points and lines of the 7%, for all i ; asfor incidence relations, letting P, l be a point and a line and letting ir, bethe first of the partial planes containing P and 1, the incidence relationbetween P and l in irj is the same as the incidence relation of P and l inany succeeding its, and we define this to be the incidence relation betweenP and l in it. One checks now that it satisfies (a) and (b) ; for if P, Qare two points of it, then they occur in some its, i, even, and if in 7rJthere is no line on P and Q, then in Ira+i, and hence in it, there is such aline. Thus (a) is verified for Tr; and similarly (b) is verified.
If iro contains four points, no three of which are collinear, then it is,as one easily checks, a projective plane, called the free extension of iro.
TxxonEM. it contains no confined configurations except those alreadycontained in zro.
PROOF. To each point P and each line l of it assign a rank, namely,the least i such that Sri contains the point or line. Let C be a confinedconfiguration in a : to see that all the lines and points of C belong to 7ro.Since C contains only a finite number of points and lines, there is someelement of C, either a point or a line, that has highest rank : say this is aline 1, of rank i-a similar argument will hold if the element of highestrank is a point. We have to see that i = 0. Suppose i > 0. Since l isnot in ,rs_l, but is in 7r;, it must have arisen in the above construction ofir{ from Tr{_l. Hence i -1 is even and l is on exactly two points of 7r(_l.In passing from ori_1 to 7rg we adjoined no points, so all points of 7r; arein Tr{_1; and since all points of C are in Tr;, all points of C are in 7rt_l.Hence on the line l of C there are only two points of C. This is a contra-diction, since C is confined. Thus i = 0; and all elements of C belongto oro. Q.E.D.
~''
tai
dye
Car
.'3
rid
`F,
coo
coo
caw
Q''
°r7
t{+am
''G
2+
0.x.4
SEC. 11 THE AXIOMATIC FOUNDATION 67
Let now oro be the partial plane consisting of four points A, B, C, Dand no lines (in particular, therefore, no three of A, B, C, D are colli-near). The free extension 7r could not contain a nontrivial configura-tion of Desargues' Theorem, since such a configuration is confined,hence would be in Iro, whereas ITo contains no confined configurations.Thus Desargues' Theorem fails inn unless perhaps it holds trivially.The remainder of the proof consists in showing that there are enoughpoints and lines in or so that Desargues' Theorem could not hold trivially.
Proceeding to construct Tr as above, we introduce in wl the six linesAB, AC, etc. ; then in orz the intersections of these lines-this introducesthree new points F, G, H, the diagonal points of the complete 4-pointABCD. The points F, 0, H are not collinear. Hence in yr there mustbe at least four points on each line. Let 0 be a point of a. Through 0take, in IT, three lines 1, m, n ; on 1, points A, A' ; on m, points B, B'; andmake this choice so that 0, A, A', B, B' are distinct. Take C on n sothat ABC is a triangle, C 0 0 ; take C' on n so that A'B'C' is a triangle,C' 94-0, C' *C. Point C' can be chosen this way since on any line thereare at least four points. Let D = BC - B'C', E = CA C'A', F = AB A' B'.One verifies that 0, A, B, C, A', B', C', D, E, F are ten distinct points.Were D, E, F collinear, then this figure for Desargues' Theorem wouldbe a confined configuration (this involves checking certain lines to bedistinct). By the above theorem, then, the figure would be in 'rro,which is impossible, since in, contains no confined configurations.

era
GP.
t!1
erg
...
...r+
'
v`+
"t3
e°+
(9.
app
SGT
e4~
mgt
Phi
91O
CHAPTER III
ESTABLISHING COORDINATES IN A PLANE
1. Definition of a field. We are now almost in position to show howcoordinates may be set up in the plane; but to understand just whatthis means, we have first to look at the finished product, i.e., what wewant to attain. We have done this more or less in the first part of thebook, but now we want to be more exact. Before, we constructed aprojective plane analytically, i.e., using numbers. The numbers we hadin mind were the so-called real numbers, but looking over what we havedone, we see that, for example, all the considerations could equallyhave been made for complex numbers. More generally, let us treatnumbers axiomatically, just as we have treated points and lines axio-matically. Here "numbers" will be the undefined terms : and therewill be certain undefined operations, which we may call plus and times.Our axioms will be certain theorems, or rather, like certain theorems onreal numbers with which we are familiar and which have proved fruitful.For example, consider the rule a (b +c) _ (a b) + (a c). This is a truetheorem if a, b, c are real numbers and + and are the ordinary opera-tions-this theorem can be proved, and its proof is not simple : we havejust been taking it for granted. Nor are we going to prove it now.What we are going to do is to take it as an axiom, but now a, b, c are notunderstood to be real numbers, but merely objects having the statedproperty. Let us write down some of the familiar rules.
1. RULES FOR + :(a) a + b = b + a. (So-called commutative rule for plus.)(b) (a+b)+c=a+(b+ c). (So-called associative rule for plus.)(c) For every a and b, there is an x such that a+x=b. (So-
called solvability rule for plus.)(d) There exists one and only one z such that a + z = a for some a.
(We usually write 0 for z, and call it zero.)II. RULES FOR :
(a) a b = b a. (Commutative rule for times.)68
coo
pip
.,.
maw
OB
I
..,
jai
Poi
SEC. 1 ESTABLISHING COORDINATES IN A PLANE 69
(b) (a b) c = a (b c). (Associative rule for times.)(c) For every a and b, with a # 0, there is an x such that a x = b.
(Right Solvability rule for times.)(o') For every a and b, with a 96 0, there is a y such that y a = b.
(Left solvability rule for times.)III. RULES COMBINING + AND :
(a) (Left distributive rule.)(b) (b (Right distributive rule.)
We are going to take these rules as axioms : i.e., we have a collectionof undefined objects, which we will call a field, in which there are twoundefined relations + and such that the above rules hold. Moreover,we suppose that a + b and a b, for any elements a, b in the field, alsorepresent elements of the field. We express this assumption by sayingthat the collection is closed under plus and times. We will also supposethe collection has at least two elements in it. We sum all this up in thefollowing definition.
DEFINITION. A commutative field is a set of at least two elementsthat is closed under two operations, plus and times, that satisfy theten axioms written above.
The word commutative in the definition refers specifically to the rulea b = b a. If we do not take this as an assumption we speak of a notnecessarily commutative field; if a b 0 b a for some a, b, then we speakof a noncommutative field.
The above rules, taken as axioms, are not independent : for example,the right distributive rule follows at once from the left distributive ruleand commutativity of times ; and IIc' follows from He in virtue of IIa.In the case, though, that one would wish to speak of a not necessarilycommutative field, i.e., if one dropped IIa, then it would be necessaryto include IIc' as well as IIc and IIIb as well as IIIa. Even then, how-ever, the system is not independent, as Id follows from Ia, b, c : we pro-ceed to prove this.
THEOREM 1. If a + x = a for some a, then a + x = a for all a.
PROOF. Given a +x = a for some a, we have to show that also b + x = bfor any b. By Ic, there is a t such that a + t = b. Then t + a = b also,from Ia. Now t+(a+x)=t+a, whence (t+a)+x=t+a, by lb.Hence b+x=b.
DEFINITION. An element z such that a + z = a for all a is called aneutral element under plus.
COROLLARY. If a + x = a for some a, then x is a neutral element underplus.
4-4m
ow.
70 LECTURES IN PROJECTIVE GEOMETRY CaAv 3
THEOREM 2. There exists at least one neutral element under plus.
PROOF. Let a be any element (a field contains at least two elements).By Ic, there exists a z such that a + z = a, for this particular a. ByTheorem 1, a + z = a for all a.
THEOREM 3. There exists at most one neutral element under plus: thiselement is also called zero.
PROOF. Let z and w be neutral elements under plus. We havez + w = w + z by Ia. Now z + w = z, because w is neutral, and w + z = wbecause z is neutral ; therefore w = z.
Rule Id follows at once from the above theorems, and since thesewere proved solely on the basis of Ia, b, o, we see that Id follows fromIa, b, c. Since this is the case, why did we include it in the definitionof field? Because the zero element is used in IIc, and if we had notwritten down Id, we would have had to stop in the middle of thedefinition and establish it before proceeding. Incidentally, this showsone reason for not insisting upon independence.
THEOREM 4. Given a, b, there exists at most one x such that a + x = b.
PROOF. Let a + x = b, a + y = b. To prove x = y. We have a + x =a + Y. Let a' be such that a'+ a = z (use Ic and Ia), where z is the zeroelement. Then a'+ (a + x) = a'+ (a + y), whence (a'+ a) + x = (a'+ a) + y,z+x=z+yandx=y. Q.E.D.
DEFINITION. The solution of a + x = z is called - a. (There existsa solution by Ic and only one by Theorem 4.)
THEOREM 5. - (- a) = a.
PROOF. -(-a) is the solution of x + (- a) = z. Now a + (- a) = z,since -a is the solution of a + t = z. So a is the solution of x + (- a) = z.
THEOREM 6. -(a+b)=(-a)+(-b).Exercise. Prove Theorem 6.
DEFINITION. We write a - b for a + (- b) and - a + b for (- a) + b.
Exercise. Prove that - (a - b) = - a + b.
THEOREM 7. a z = z for every a.
PROOF. For some b, b + z = b. Therefore a (b + z) = a b, whence(a b) + (a z) = a b, whence az = z by Theorem 1, Corollary, and Theorem3.
THEOREM 8. a(-b)=

.r.
.+.
t.7f3
.
ear
coo
m°$
04.
o-.,
e0+
.+.
(OD
...
aim4°q
.s7
f3,
.o^
C"'
c°7
,mom
;,I
SEc. 2 ESTABLISHING COORDINATES IN A PLANE 71
PROOF. b+(-b)=z, soa(-b) = - (a b). Q.E.D.
Exercise. Prove that (- a) (- b) = a b.Using IIa (and other axioms) one can prove the existence of a unique
neutral element under times, i.e., there is one and only one element esuch that a e = e a = a for all a (one first gets this for a # z, but z. e = e z=z by Theorem 7). Actually one can get this result, with a little extra
effort, without using IIa. It would be very instructive to carry out allour considerations without using IIa, but this is not practicable in anintroductory two-term course. Unfortunately, this will have the con-sequence that one cannot, in such a course, set up coordinates usingDesargues' Theorem alone : another assumption will have to be made,and we shall make it at the point needed. (We do briefly consider thenoncommutative case; see p. 86).
Having a unique neutral element under times, one can prove, just asin the corresponding situation with plus, that ax = b, with a 0 0, hasjust one solution. This we write as z = b/a.
Exercise. Prove that b+d=ad+bc
2. Consistency of the field axioms. Just as with the axioms for a pro-jective plane, so here for the field axioms, we raise the question ofconsistency. As before we establish consistency by means of a model.
Every field must contain at least two elements. Let us then taketwo objects a, b and try to make them into a field : this means that wemust define plus and times in such way that the field axioms hold.
Every field contains a neutral element under plus, usually denoted 0.One of a, b is therefore neutral and will conveniently be denoted by 0;say a = 0, so our two elements are denoted 0, b.
Every field contains a neutral element e under times. Note thate00, for if e=0, then for every a, a = a e = a 0 = 0, so the field wouldcontain just one element, 0. Hence we denote our two elements by0, e.
From theorems already established we must have (if we are to have afield at all) the following : 0.0 = 0, 0 e = e 0 = 0, e e = e. These rulesare conveniently summarized in a table :
0
0
0
e
0
e 0 e
TABLE FOR TIMES
.l.
72 LECTURES IN PROJECTIVE GEOMETRY CHAP. 3
As for plus, we must have 0+0=02 0+5 = e + 0 = e. Thereremainsthe question of how to define a+e. In fact, we have no liberty, ase + e = e implies e is a solution of e + x = e, hence (by a previous theorem)e = 0, which is not so. So we must place e + e = 0. These rules may besummarized as follows :
0
e
0
0
e
TABLE FOR PLUS
The considerations so far can be summed up in the following theorem.
T EOREM. There is at most one field containing exactly two elements.
To show that there is at least one field containing exactly two ele-ments, we have to verify that with plus and times as defined, the fieldaxioms obtain. For example, we have to verify the associative rule :a (b c) = (a b) c. To do this we have to substitute 0 ore for each ofa, b, c in this equation, apply the times table, and see that both sidesare equal. To do this in detail would require verification of eightequalities (since there are two choices for each of a, b, c). In this wayassociativity of times can be checked : but one can argue more expedi-tiously as follows : if either a, b, or c is 0, then both sides are 0. Thusseven of the eight possibilities are taken care of ; as for the eighth, herewe must take a'= b = c = e, in which case both sides are e.
In a similar way one verifies that all the field axioms obtain. Thus :
THEOREM. There is one and only one field with exactly two elements.
Exercise. Show that there is one and only one field with exactly threeelements.
8. The Analytic Model. On the basis of the commutative fieldaxioms, we can introduce subtraction and division, and so one computesin a field, as far as +, , -, and = are concerned, exactly in thefamiliar way. We can now form a projective plane over any (commu-tative) field F very much as we did in the first part of the book, but,because at that time we had not specified the axioms, let us go over this
a abriefly again. By a point P b we shall mean a triple b , not all
(0) cas
a, b, c = 0. and all its multiples;kb
, A :A 0; i.e., a point is a class of1c
II.
Snc. 3 ESTABLISHING COORDINATES IN A PLANE 73
column triples. A line is defined in quite the same way as a class of row/a\
triples. We say P b is on l (r, 8, t) if ra + sb + tc = 0. With these\c/
definitions one can easily verify, with the algebra set as a prerequisitefor this book, the axioms of alignment : we will not go into the detailsfor these axioms, but will pay some attention to Desargues' Theorem.Let us call the plane, so constructed, the projective number planeover F.
a aIf P b is a point, then b are called coordinates of the point ; we
c
aalso say that the triple b represents the point, and, if no misunder-
c
standing is to be feared, is the point. Similarly, we speak of coordi-nates of a line. If l(a, b, c) is a line, then a point is on this line if andonly if its coordinates satisfy the equation ax + by + cz = 0. Thisequation is called an equation of the line. Given a line we can write downits equations ; and conversely, given an equation ax + by + cz = 0, not alla, b, c = 0, we can write down a line one of whose equations is the givenequation, viz., the line l(a, b, c). If in ax + by + cz = 0, we think of x, y, z
xas the coordinates of some fixed point P(y) , and the equation as a con-
x
xdition on the variable line l(a, b, c) to be on P y , then the equation is
(Z)called a (line) equation of the point.
xl ylare distinct points, then for any A theTHEOREM. If P( x$ , PC1
\x/s ys
xl+Aylnumbers x{ + Ayt, i =1, 2, 3 are not all = 0, and P xs + Aye is collinear
xs + ayswith the first two points.
PROOF. Were xl + Aye = 0, x2 + Ays = 0, and x s + Ays = 0, then the xtwould be all the same multiple of the corresponding yt and the points
xl yl
P x$ , P y2 would be the same. Therefore the x t + Ayt are notxs ys
ear
cue
coo
000
titIII
74 LECTURES IN PROJECTIVE GEOMETRY
CX3
i+Ayiall = 0, and we may speak of the point P X2 + Ays .
+ Aysxl yi
l(ai, as, as) be a line on both P X2 and P y2 .
x3 ys
Then
CRAP. 3
Let, now,
aixi+asxs+asxs = 0alyi+asys+aays = 0.
Multiplying the second equation by A and adding to the first, we get
al(xi+Ayi)+as(xs+Ays)+aa(xa+Ays) = 0,
xl+Ayiwhence P xs+Ays lies on l(ai, as, a3). Q.E.D.
xa + Aysxl
For simplicity in notation, we will write x for xs(X3)
and x + Ay for
xi+AyiX2 + Aysxa + Ays
COROLLARY (to last theorem). With hypotheses as before, the sameconclusion holds for Ax +µy if not both A= 0 and µ = 0. (PROOF : If
A 9& 0, say, apply the theorem to x + y.)
THEOREM. If x, y, z are coordinates of three distinct collinear points,then there exists A, µ such that z=Ax+µy.
PROOF. Let l(ai, as, as) be the line on these three points. Thenwe have :
aixi+asxs+asxs = 0aryl+asys+asya = 0a1zi+a2x2 +a3z3 = 0.
Not all xi, xs, xs = 0. Say xi 96 0. Now
yj = -.x1, ys = xi xs, y3 = xi xs
are not all possible since the points Px, Py are distinct. The first ofthese equations holds, so the second or third does not. Say the seconddoes not. We have, then, ysxl - ylxs # 0. Now solve the equations
Axi+µyi = ziAx$+µys = zs.
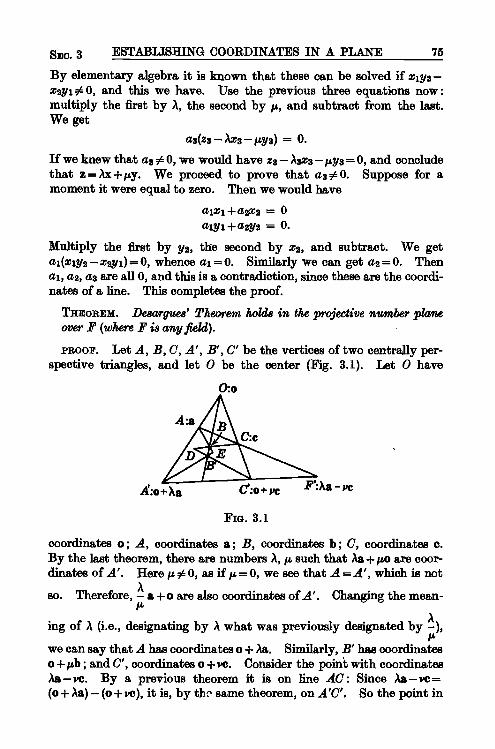
mho
coo
`QC
s
SEc. 3 ESTABLISHING COORDINATES IN A PLANE 75
By elementary algebra it is known that these can be solved if xiys-xsyl 2A 0, and this we have. Use the previous three equations now :multiply the first by A, the second by µ, and subtract from the last.We get
as(xs - Axs - µys) = 0.
If we knew that as 96 0, we would have zs - Aaxa - µys = 0, and concludethat z = Ax +µy. We proceed to prove that as 0 0. Suppose for amoment it were equal to zero. Then we would have
alxl+asxs = 0aiyi+asys = 0.
Multiply the first by ys, the second by xs, and subtract. We getai(xlys - xsyi) = 0, whence ai = 0. Similarly we can get as = 0. Thenai, as, as are all 0, and this is a contradiction, since these are the coordi-nates of a line. This completes the proof.
THEOREM. De8argue8' Theorem holds in the projective number planeover F (where F i8 any field).
rRooF. Let A, B, C, A', B', C' be the vertices of two centrally per-spective triangles, and let 0 be the center (Fig. 3.1). Let 0 have
0:0
FIG}. 3.1
coordinates o; A, coordinates a; B, coordinates b; C, coordinates c.By the last theorem, there are numbers A, µ such that Aa+µo are coor-dinates of A'. Here µ 96 0, as if µ = 0, we see that A = A', which is not
so. Therefore, A a +o are also coordinates of A'. Changing the mean-
i of A (i.e., designating by A what was previously designated by 4we can say that A has coordinates o+ Aa. Similarly, B' has coordinateso+µb; and C', coordinates o+vc. Consider the point with coordinatesas - vc. By a previous theorem it is on line AC : Since Aa - vo =(o + ha) - (o +vc), it is, by th:' same theorem, on A'C'. So the point in
FO
O
`m'
"XI
cap
y1,
C+
.
a.,
IIIcep
'al
Cam
-'
mop
III
76 LECTURES IN PROJECTIVE GEOMETRY CHAP. 3
question is F = AC A'C' ; F has coordinates Aa - ve. Similarly one seesthat D has coordinates vc - µb, and E has coordinates pb - Aa. SinceAa -,ub = (Aa - vc) + (vc - µb), the points D, E, F are collinear. Q.E.D.
In setting up the above problem, we could have taken Aa instead of aas coordinates of A. With a change of notation, this makes A havecoordinates a, A', coordinates o + a. Similarly, we might have sup-posed B' to have coordinates o + b ; C', coordinates o + c. Usually suchsimplifying methods, elimination of unnecessary letters, are helpful.The above proof was so simple, however, that to }lave introduced theidea at once would have obscured the proof.
Exercises
1. Let a, b, a+Ab be the coordinates of three distinct collinear pointsA, B, C. Find coordinates of the point D such that H(A, B ; C, D). (Answer:a-Ab are such coordinates.)
2. Establish Pappus' Theorem analytically.
4. Geometric description of the operations plus and times. Start witha commutative field F, and construct the projective number planeover F. We now ask whether the field makes itself manifest in anyfairly direct manner in the geometry of this plane.
Let us introduce nonhomogeneous coordinates xi/xs, x2/x$ for thepoint x, where xs 0 0 is assumed. Every point, then, except those onthe line xs = 0, has nonhomogeneous coordinates. Every point on the
1
line x2 = 0, except the point P 0 , has nonhomogeneous coordinates of0
the form (x, 0), where x=x1/xs. Conversely, for any number x in F,we see that (x, 0) are the coordinates of some point on xs = 0, namely,
the point P(0). Thus we see that the points of the line X2 = 0 mints
one point are in one-to-one correspondence with the elements of F.We can visualize to ourselves the field F as spread out on the line X2 = 0,
1
covering it completely except for the point P 0 . Label this point1 (0)
P(0) with the letter Q.0
Let us take two points A, B on X2 = 0, A 5&SZ, B 0 Q. Let A havecoordinates (a, 0), B, coordinates (b, 0). Now we can combine a and bby the field operations and form a+ b. There is a point C such that 0
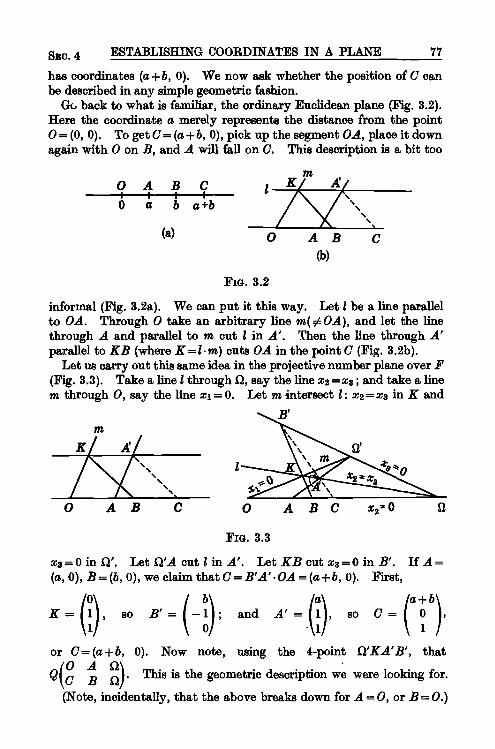
'ti'
Sicc. 4 ESTABLISHING COORDINATES IN A PLANE 77
has coordinates (a+ b, 0). We now ask whether the position of C canbe described in any simple geometric fashion.
Gc, back to what is familiar, the ordinary Euclidean plane (Fig. 3.2).Here the coordinate a merely represents the distance from the point0 = (0, 0). To get C = (a + b, 0), pick up the segment OA, place it downagain with 0 on B, and A will fall on C. This description is a bit too
O A B C
0 a b a+b
(a)
FIG}. 3.2
informal (Fig. 3.2a). We can put it this way. Let l be a line parallelto OA. Through 0 take an arbitrary line m(O OA), and let the linethrough A and parallel to m out l in A'. Then the line through A'parallel to KB (where K = l m) cuts OA in the point C (Fig. 3.2b).
Let us carry out this same idea in the projective number plane over .F(Fig. 3.3). Take a line l through 0, say the line x2 = x3; and take a linem through 0, say the line x1= 0. Let m intersect l : X2=XS in K and
Fi&. 3.3
xe = 0 in 0'. Let i2'A out l in A'. Let KB out x8 = 0 in B'. If A =(a, 0), B = (b, 0), we claim that C = B'A'. OA = (a + b, 0). First,
0 b
(1)
+bK= 1 so B' = (_i'; and A' so C 0
(1) 0 1
or C=(a+b, 0). Now note, using the 4-point S2'KA'B', that0
BB t s2). This is the geometric description we were looking for.Q(C C
(Note, incidentally, that the above breaks down for A = 0, or B = 0.)
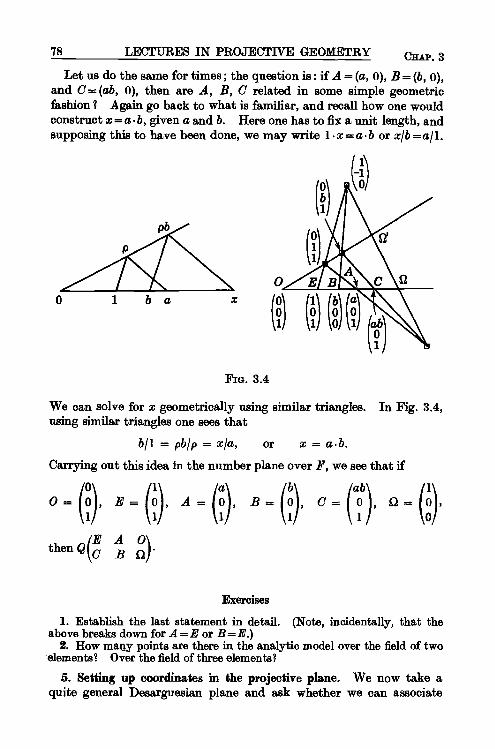
"Z%
'r2
78 LECTURES IN PROJECTIVE GEOMETRY Caep 3
Let us do the same for times ; the question is : if A = (a, 0), B = (b, 0),and C = (ab, 0), then are A, B, C related in some simple geometricfashion? Again go back to what is familiar, and recall how one wouldconstruct x = a b, given a and b. Here one has to fix a unit length, andsupposing this to have been done, we may write 1 x = a b or x/b =a/ 1.
Fia. 3.4
We can solve for x geometrically using similar triangles. In Fig. 3.4,using similar triangles one sees that
b/1 = pb/p = x/a, or x = a.b.
Carrying out this idea in the number plane over F, we see that if
0 1 a b ab0= 0 E= 0, A= 0, B = 0, C = 0 , 0= 0,
1 1 1 1 1 0
then QGE.,A OB S2
Exercises
1. Establish the last statement in detail. (Note, incidentally, that theabove breaks down for A = E or B = E.)
2. How many points are there in the analytic model over the field of twoelements? Over the field of three elements?
5. Setting up coordinates in the projective plane. We now take aquite general Desarguesian plane and ask whether we can associate
I71
aim
f3,
+m
Oaim
.000
"t7
may
Q,''
[7+
Q,+
SEC. 5 ESTABLISHING COORDINATES IN A PLANE 79
coordinates to its points in such manner that the plane becomes a pro-jective number plane over some field ; or we can put the question asfollows : Can we assign coordinates to the points in such manner thatthe lines have linear equations? Keep in mind that we are not given anyfield! If a field is to enter the discussion, we must construct it our-selves in terms of the given plane.
The work of the last section was by way of analysis. It in no way entersinto the work of this section except as a guide. We proceed on the basisof Axioms 0-5 and Desargues' Theorem : at a certain point we shall addanother axiom.
What, then, shall be our field F? Keeping in mind the analysis ofthe last section, we see that if we are to be successful in introducingcoordinates, then the points of any line of our plane minus one pointwill be in one-to-one correspondence with the elements of F. We there-fore take a line 1, fix on it a point S2, and try to make l - S2 into a field.We further select two points 0 and E on 1, and try to make l -Q into afield such that 0 be the zero, E the identity of the field.
Still being guided by the analysis of the last section, we write downthe following definition.
DEFINITION. Let A, B be two points on 1, A 9& 0, B 0 SZ, A 0 0,
B 0 0. Let C be the point such that Q(C B ). Then we place
C = A + B by definition (i.e., we are defining + ). We also placeX + O = O + X = X for any X on 1, X q& Q.
Our problem now is to show that plus so defined satisfies the fieldaxioms. Note first that l - S2 is closed under plus ; i.e., A + B is never.Q. This is so because of the necessary inequalities on quadrangularhexads.
We have to check that A + B = B + A. For A=O or B=O, this isimmediate, by definition. Consider, then, the other case. Let
A+B=C, B+A=D. To prove C=D. We haveQ(C B0)
and
`0 B 11Q D A Why is C = D? By a theorem we can interchange a0)pair from above and below, so interchanging A with B and Sl with g
we get Q (C A il) . Now there is only one solution to Q AA JQ)so C = D.
How about solvability? Can we solve A + X = B ? This comes to0asking: Can we solve Q(B X Ql ? Yes, we certainly can, by our
theorems on quadrangular hexads, at least if A 0 0, 0 B. If A = 0,
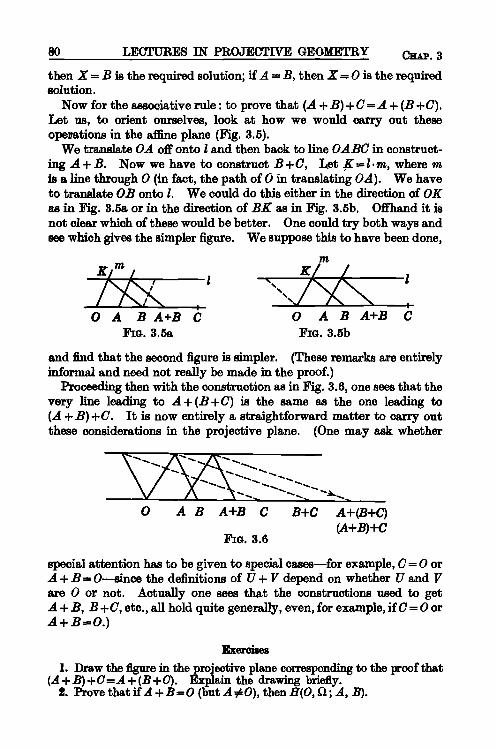
80 LECTURES IN PROJECTIVE GEOMETRY Carp. 3
then X = B is the required solution; if A = B, then X = 0 is the requiredsolution.
Now for the associative rule : to prove that (A + B) +C = A + (B +C).Let us, to orient ourselves, look at how we would carry out theseoperations in the affine plane (Fig. 3.5).
We translate OA off onto l and then back to line OABC in construct-ing A + B. Now we have to construct B +0, Let .C - l m, where mis a line through 0 (in fact, the path of 0 in translating OA). We haveto translate OB onto 1. We could do this either in the direction of OKas in Fig. 3.5a or in the direction of BK as in Fig. 3.5b. Offhand it isnot clear which of these would be better. One could try both ways andsee which gives the simpler figure. We suppose this to have been done,
0 A B A+BFIG. 3.5a
C 0 B A+B CA
(A+B)+C
FiG. 3.5b
and find that the second figure is simpler. (These remarks are entirelyinformal and need not really be made in the proof.)
Proceeding then with the construction as in Fig. 3.6, one sees that thevery line leading to A + (B + C) is the same as the one leading to(A + B) +C. It is now entirely a straightforward matter to carry outthese considerations in the projective plane. (One may ask whether
0 A B A+B C B+C A+(B+C)
FIG 3.6
special attention has to be given to special cases-for example, C = 0 orA + B = 0-since the definitions of U + V depend on whether U and Vare 0 or not. Actually one sees that the constructions used to getA + B, B +0, etc., all hold quite generally, even, for example, if C = 0 orA+B-0.)
Exercises
1. Draw the figure in the projective plane corresponding to the proof that(A+B)+C=A+(B+C). Explain the drawing briefly.
2. Prove that if A + B = 0 (but A 0 0), then H(O, Q; A, B).
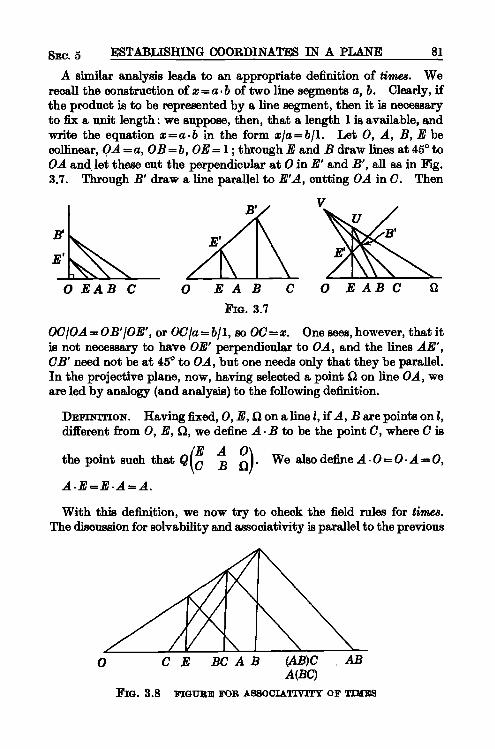
SEC. 5 ESTABLISHING COORDINATES IN A PLANE 81
A similar analysis leads to an appropriate definition of times. Werecall the construction of x = a b of two line segments a, b. Clearly, ifthe product is to be represented by a line segment, then it is necessaryto fix a unit length : we suppose, then, that a length 1 is available, andwrite the equation x = a b in the form x/a = b/ l . Let 0, A, B, E becollinear, OA = a, OB = b, OE =1; through E and B draw lines at 45° toOA and, let these out the perpendicular at 0 in E' and B', all as in Fig.3.7. Through B' draw a line parallel to E'A, cutting OA in C. Then
O EAB C B A B C 0FIa. 3.7
E
OC/OA = OB'/OE', or OC/a = b/ 1, so OC = x. One sees, however, that itis not necessary to have OE' perpendicular to OA, and the lines AE',CB' need not be at 45° to OA, but one needs only that they be parallel.In the projective plane, now, having selected a point S2 on line OA, weare led by analogy (and analysis) to the following definition.
DEFINITIOx. Having fixed, 0, E, Q on a line 1, if A, B are points on 1,different from 0, E, Q, we define A A. B to be the point C, where C is
the point such that QC, B ) . We also define A-0=04=0,
With this definition, we now try to check the field rules for times.The discussion for solvability and associativity is parallel to the previous
C E BC A B (AB)CA(BC)
AB
FIG. 3.8 FIGURE FOR ASSOCIATIVITY OF TIMES

ICI
Ilk
G.782 LECTURES IN PROJECTIVE GEOMETRY CHAP 3
discussion of these items for plus and shall not be written out here(Fig. 3.8). We postpone discussion of commutativity and consider nextthe distributive rules.
Let A be a point on our line 1, A i4 0, A 0 U. Consider the operationof passing from a point X on l to the point A X. We call such an opera-tion a left multiplication. Similarly we define a right multiplication.
THEOREM. The transformation X A X is a projectivity.The transformation X - X A is a projectivity.
PROOF. In the construction of A B (Fig. 3.7), think of A as fixedand X = B as variable. The points E', U, V are also fixed. Then thepassage from B to C = A B = A X can be described as follows. Con-
sider the projectivity l U m n 1. Then B goes into C under this pro-
jectivity. That is, X -->A X is a projectivity. The second statementof the theorem is proved similarly.
COROLLARY. The above projectivities send 0 into 0, SZ into Q.
THEOREM. A (B +C) _ (A B) + (A - C)(B+C).A =
PROOF. We have Q(OB+CC .)° by definition of B+C. Now
apply the left multiplication by A. This operation is a projectivity,and therefore sends quadrangular sets into quadrangular sets. Thus
O AB S2 0, 0, SZ-Q under the projectivity inQ(A(B+C) ACQS 2
question. But by definition of plus, we then get (A B) + (A C) _A (B+C). Q.E.D.
We proceed to the commutative rule. Here one comes upon a diffi-culty, and to overcome it we will assume Pappus' Theorem ; i.e., it issufficient to assume Pappus' Theorem in order to prove the commuta-tive rule : it is also necessary, but this point is not under immediatediscussion.
To our axioms, then, we at this point add Pappus' Theorem.
THEOREM. A B = B . A ; multiplication satisfies the commutative rulein a Pappian plane.
PROOF. It is important to keep in mind that A and B play essen-tially distinct roles in the construction of A A. B. In the construction ofB. A, the roles of the two letters are reversed. First, to orient our-selves, let us construct B B. A, in the Euclidean plane, reversing the roles
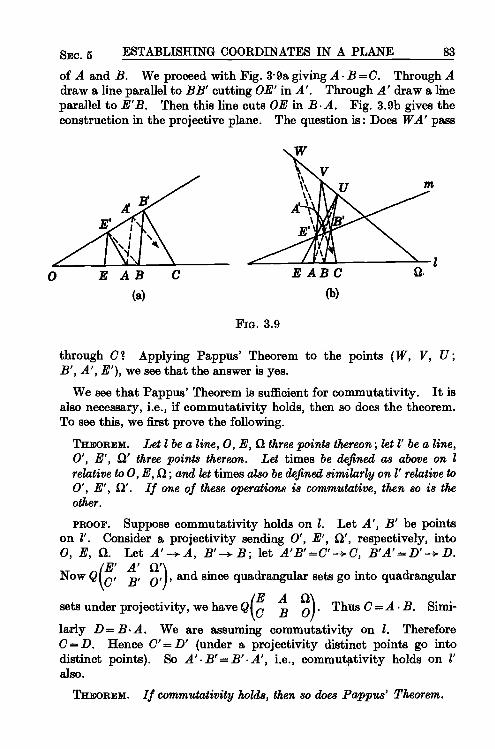
Cam
' and
Has
off'
SEC. 5 ESTABLISHING COORDINATES IN A PLANE 83
of A and B. We proceed with Fig. 3.9a giving A B=C. Through Adraw a line parallel to BB' cutting OE' in A'. Through A' draw a lineparallel to E'B. Then this line cuts OE in B A. Fig. 3.9b gives theconstruction in the projective plane. The question is : Does WA' pass
Fra. 3.9
AB(b)
through 0? Applying Pappus' Theorem to the points (W, V, U ;B', A', E'), we see that the answer is yes.
We see that Pappus' Theorem is sufficient for commutativity. It isalso necessary, i.e., if commutativity holds, then so does the theorem.To see this, we first prove the following.
THEOREM. Let l be a line, 0, E, SZ three points thereon ; let l' be a line,0', E', KY three points thereon. Let times be defined as above on lrelative to 0, E, £ ; and let times also be defined similarly on l' relative to0', E', KY. If one of these operations is commutative, then so is theother.
PROOF. Suppose commutativity holds on 1. Let A', B' be pointson 1'. Consider a projectivity sending 0', E', V, respectively, into0, E, Q. Let A' A, B'-->- B ; let A'B'=C'--> C, B'A'= D'--->- D.
E' A' 0Now Q(C' B' 0')° and since quadrangular sets go into quadrangular
sets under projectivity, we have Q(C B 0)' Thus C = A B. Simi-
larly D = B A. We are assuming commutativity on 1. ThereforeC=D. Hence C'=D' (under a projectivity distinct points go intodistinct points). So A'-B'=B'-A', i.e., holds on l'also.
THEOREM. If commutativity holds, then so does Pappus' Theorem.
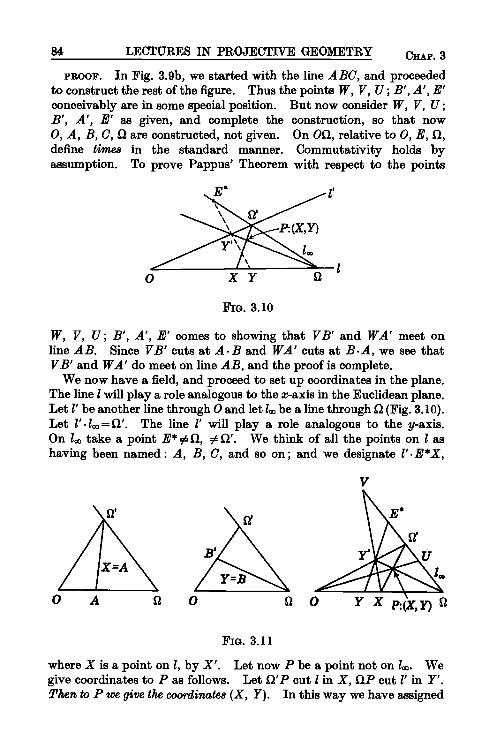
"'O
84 LECTURES IN PROJECTIVE GEOMETRY CHAP. 3
PROOF. In Fig. 3.9b, we started with the line ABC, and proceededto construct the rest of the figure. Thus the points W, V, U; B', A', E'conceivably are in some special position. But now consider W, V, U;B', A', E' as given, and complete the construction, so that now0, A, B, C, SZ are constructed, not given. On 052, relative to 0, E, S2,define times in the standard manner. Commutativity holds byassumption. To prove Pappus' Theorem with respect to the points
FIG. 3.10
W, V, U; B', A', E' comes to showing that VB' and WA' meet online AB. Since VB' cuts at A. B and WA' cuts at B A, we see thatVB' and WA' do meet on line AB, and the proof is complete.
We now have a field, and proceed to set up coordinates in the plane.The line l will play a role analogous to the x-axis in the Euclidean plane.Let l' be another line through 0 and let lm be a line through 52 (Fig. 3.10).Let 1'. 1. = S2'. The line l' will play a role analogous to the y-axis.On 1. take a point E* oil, # 52'. We think of all the points on l ashaving been named : A, B, C, and so on ; and we designate l' E*X,
V
sz 0 Y X P.-X, Y) sz
FIG. 3.11
where X is a point on 1, by X. Let now P be a point not on L. Wegive coordinates to P as follows. Let S2'P cut l in X, UP cut l' in Y'.Then to P we give the coordinates (X, Y). In this way we have assigned
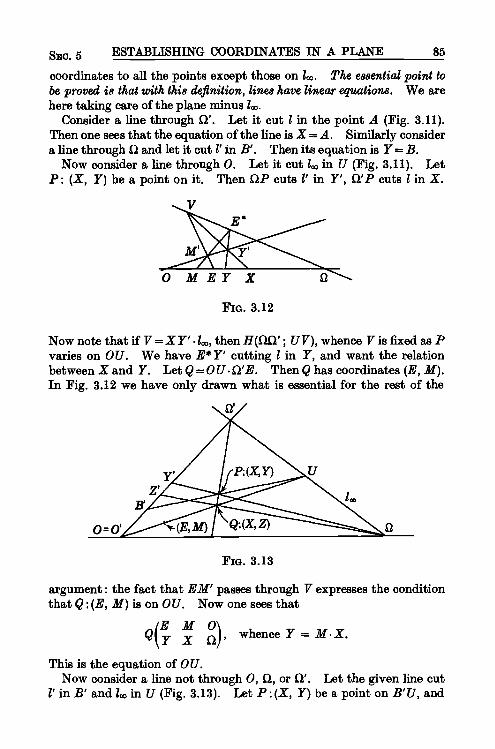
gyp'
Sxc. 5 ESTABLISHING COORDINATES IN A PLANE 85
coordinates to all the points except those on I.. The essential point tobe proved is that with this definition, lines have linear equations. We arehere taking care of the plane minus l..
Consider a line through SI'. Let it cut l in the point A (Fig. 3.11).Then one sees that the equation of the line is X = A. Similarly considera line through SI and let it cut l' in B'. Then its equation is Y= B.
Now consider a line through 0. Let it cut l.in U (Fig. 3.11). LetP: (X, Y) be a point on it. Then SIP cuts l' in Y', SI'P cuts l in X.
Fm. 3.12
Now note that if V = X Y'- I., then H(SISI' ; UV ), whence V is fixed as Pvaries on 0 U. We have E* Y' cutting l in Y, and want the relationbetween X and Y. Let Q = O U SI'E. Then Q has coordinates (E, M).In Fig. 3.12 we have only drawn what is essential for the rest of the
FIG. 3.13
argument : the fact that EM' passes through V expresses the conditionthat Q : (E, M) is on 0 U. Now one sees that
E M Owhence Y = M. X.Q (Y X SI)'
This is the equation of O U.Now consider a line not through 0, SZ, or SI'. Let the given line cut
l' in B' and 1. in U (Fig. 3.13). Let P : (X, Y) be a point on B'U, and
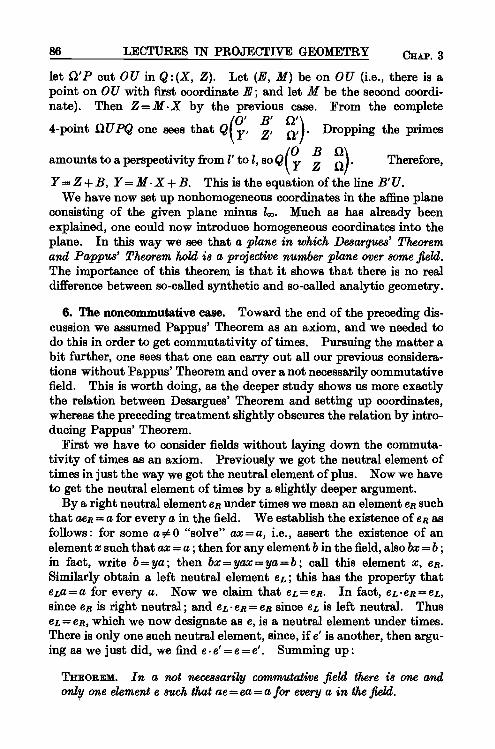
:9.
pH.
0
Lam
.eg
o
...
coo
..,
F,,
C7'
pip
GE
C ?04
e+.
..,
0°4p.+
s",
coati
cm.
a..
Carp
dabapp
yaw'}' .4'
F.'
...
86 LECTURES IN PROJECTIVE GEOMETRY Canr 3
let SZ'P cut OU in Q:(X, Z). Let (E, M) be on OU (i.e., there is apoint on O U with first coordinate E ; and let M be the second coordi-nate). Then Z = M X by the previous case. From the complete
4-point SZ UPQ one sees that Q Z, ,). Dropping the primes
amounts to a perspectivity from l' to 1, so Q ( YB
Q) . Therefore,
Y = Z + B, Y = M X + B. This is the equation of the line B'U.We have now set up nonhomogeneous coordinates in the affine plane
consisting of the given plane minus L. Much as has already beenexplained, one could now introduce homogeneous coordinates into theplane. In this way we see that a plane in which Desargues' Theoremand Pappu8' Theorem hold i8 a projective number plane over some field.The importance of this theorem is that it shows that there is no realdifference between so-called synthetic and so-called analytic geometry.
6. The noncommutative case. Toward the end of the preceding dis-cussion we assumed Pappus' Theorem as an axiom, and we needed todo this in order to get commutativity of times. Pursuing the matter abit further, one sees that one can carry out all our previous considera-tions without Pappus' Theorem and over a not necessarily commutativefield. This is worth doing, as the deeper study shows us more exactlythe relation between Desargues' Theorem and setting up coordinates,whereas the preceding treatment slightly obscures the relation by intro-ducing Pappus' Theorem.
First we have to consider fields without laying down the commuta-tivity of times as an axiom. Previously we got the neutral element oftimes in just the way we got the neutral element of plus. Now we haveto get the neutral element of times by a slightly deeper argument.
By a right neutral element eR under times we mean an element eR suchthat aeR = a for every a in the field. We establish the existence of eR asfollows : for some a00 "solve" ax=a, i.e., assert the existence of anelement x such that ax = a ; then for any element b in the field, also bx = b ;in fact, write b = ya ; then bx = yax = ya = b ; call this element x, eR.Similarly obtain a left neutral element eL; this has the property thateLa = a for every a. Now we claim that eL = eR. In fact, e L eR = eL,since eR is right neutral ; and eL eR = eR since eL is left neutral. ThuseL=eR, which we now designate as e, is a neutral element under times.There is only one such neutral element, since, if e' is another, then argu-ing as we just did, we find e e' = e = e'. Summing up :
THEOREM. In a not necessarily commutative field there is one andonly one element e such that ae = ea = a for every a in the field.
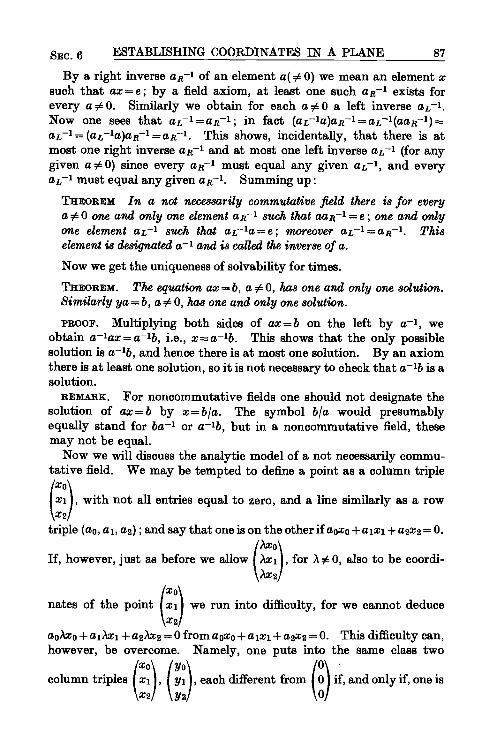
0app
SEC. 6 ESTABLISHING COORDINATES IN A PLANE 87
By a right inverse aR1 of an element a( 0) we mean an element xsuch that ax=e; by a field axiom, at least one such aR-1 exists forevery a =AO. Similarly we obtain for each a00 a left inverse ac'.Now one sees that aL 1= aR1 ; in fact (aL 1a)aR 1= aL-1(aaR 1) =aL 1= (aL 1a)aR1= aR1. This shows, incidentally, that there is atmost one right inverse aR1 and at most one left inverse aL 1 (for anygiven a 96O) since every aR1 must equal any given aL 1, and everyaL 1 must equal any given an 1. Summing up :
THEOREM In a not necessarily commutative field there is for everya # 0 one and only one element ail such that aai1= e ; one and onlyone element aL 1 such that aL 1a = e ; moreover aL 1= aR1. Thiselement is designated a-1 and is called the inverse of a.
Now we get the uniqueness of solvability for times.
THEOREM. The equation ax = b, a 0 0, has one and only one solution.Similarly ya = b, a 0 0, has one and only one solution.
PROOF. Multiplying both sides of ax = b on the left by a-1, weobtain a-lax = a-1b, i.e., x = a-1b. This shows that the only possiblesolution is a-1b, and hence there is at most one solution. By an axiomthere is at least one solution, so it is not necessary to check that a-1b is asolution.
REMARK. For noncommutative fields one should not designate thesolution of ax = b by x= b/a. The symbol bra would presumablyequally stand for ba-1 or a-1b, but in a noncommutative field, thesemay not be equal.
Now we will discuss the analytic model of a not necessarily commu-tative field. We may be tempted to define a point as a column triple
xox1 , with not all entries equal to zero, and a line similarly as a rowx2
triple (ao, a 1, a2) ; and say that one is on the other if aoxo + a1x1 + a2x2 = 0.Axo
If, however, just as before we allow Ax1 , for A 0 0, also to be coordi-Ax2
xo
nates of the point x1 we run into difficulty, for we cannot deduce
(X2)aoAxo+alAxl+a2Ax2=Ofromaoxo+alxl+a2x2=0. This difficulty can,however, be overcome. Namely, one puts into the same class two
xo yo 0
column triples x1 y1 , each different from 0 if, and only if, one isx2 y2 (0)
88 LECTURES IN PROJECTIVE GEOMETRY Cam 3
a right multiple of the other (in which case the other is a right multiplexo yo
of the one) : i.e., xl yl go into the same class if and only if there isxs ys
a A such that xo = yoA, xi = yiA, x2 = ysA Similarly we put two rowtriples (not equal (0, 0, 0)) into the same class if and only if one is aleft multiple of the other. Now defining point as a class of column
xoAtriples x1.1 and line as a class of row triples {(µao, µa1, µa2)}, and
xsA
incidence by the condition that µao xoA+µa1 x1A+µas xsA = 0, onecan verify that the axioms of alignment and Desargues' Theorem obtain.
Exercises
1. Go over our previous considerations for homogeneous linear equations,but this time over a not necessarily commutative field.
2. Establish Pesargues' Theorem analytically over a not necessarilycommutative field. The technique is the same as before.
3. Show analytically that Pappus' Theorem does not hold over a non-commutative field.
The remainder of the considerations in the noncommutative case arequite like those already made in the commutative case : the axioms ofalignment and Desargues' Theorem are sufficient for establishing coor-dinates with entries from a not necessarily commutative field.
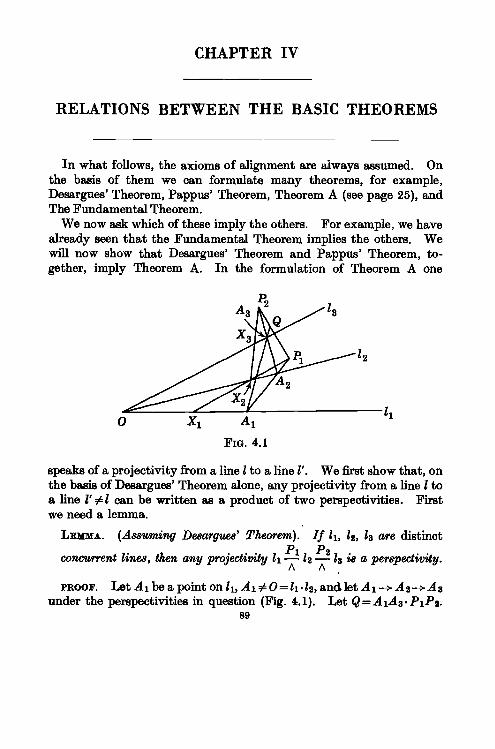
CHAPTER IV
RELATIONS BETWEEN THE BASIC THEOREMS
In what follows, the axioms of alignment are always assumed. Onthe basis of them we can formulate many theorems, for example,Desargues' Theorem, Pappus' Theorem, Theorem A (see page 25), andThe Fundamental Theorem.
We now ask which of these imply the others. For example, we havealready seen that the Fundamental Theorem implies the others. Wewill now show that Desargues' Theorem and Pappus' Theorem, to-gether, imply Theorem A. In the formulation of Theorem A one
speaks of a projectivity from a line l to a line 1'. We first show that, onthe basis of Desargues' Theorem alone, any projectivity from a line l toa line l' # 1 can be written as a product of two perspectivities. Firstwe need a lemma.
LEMMA. (Assuming Desargue8' Theorem). If 11i 12, Is are distinct
concurrent lines, then any projectivity 11 P1 12 P2 lg is a perspectivity.
PROOF. Let A 1 be a point on 11, A.100=11-12, and let Al - A2 A3under the perspectivities in question (Fig. 4.1). Let Q=A1A3.P1P2.
89
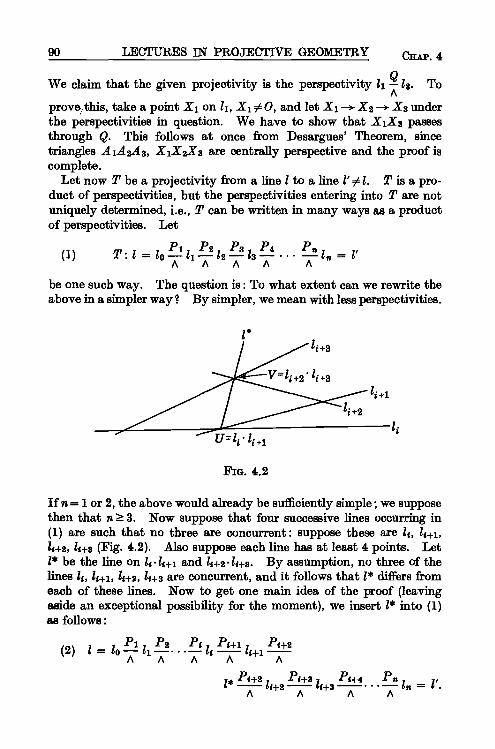
gyp'
+90 LECTURES IN PROJECTIVE GEOMETRY CIUP 4
We claim that the given projectivity is the perspectivity SiQ
Is. To
prove,this, take a point X 1 on 11, X 1 j4 0, and let X1-* X 2 - X3 underthe perspectivities in question. We have to show that X1X3 passesthrough Q. This follows at once from Desargues' Theorem, sincetriangles A1A2A3i X1X2X3 are centrally perspective and the proof iscomplete.
Let now T be a projectivity from a line I to a line I'01. T is a pro-duct of perspectivities, but the perspectivities entering into T are notuniquely determined, i.e., T can be written in many ways as a productof perspectivities. Let
(1) T: l = 1oP111P212P313P4 ...P.nln
= 1,
A n n n n
be one such way. The question is : To what extent can we rewrite theabove in a simpler way? By simpler, we mean with less perspectivities.
Ii
Fia. 4.2
If n =1 or 2, the above would already be sufficiently simple ; we supposethen that n > 3. Now suppose that four successive lines occurring in(1) are such that no three are concurrent: suppose these are lt, It+1,62, It+s (Fig. 4.2). Also suppose each line has at least 4 points. Letl* be the line on It It+1 and 62.11+3. By assumption, no three of thelines It, It+L 62, 4+3 are concurrent, and it follows that l* differs fromeach of these lines. Now to get one main idea of the proof (leavingaside an exceptional possibility for the moment), we insert l* into (1)as follows :
P1 P2 Pt Pt+1 Pt+2(2) l = 1o ^ ll n ... ^ 11 ^ 11+1A
P+11+2 Pt+311+1 P+... P1*
n In = l'.A A A A
.+.
°''
e+,
"h3
'`S'
`.r
p,,
."3
...d(
2
o,.
(MD
`CD
c..
III
°P, ^0"
.°:
Pam
Ram
'.,
P..0.1
0''Zm
ay'
a+'
''O.c7
ca,"
,c. i RELATIONS BETWEEN THE BASIC THEOREMS 91SF
Note that (2) is a way of writing T. Now by the lemma, 1t+1 and 1t+2can be dropped from (2), i.e.,
(3) 1 = 1o P,1, .-..Pt It -l* -lt+s Pt+4...L- I = 1'A n n n n n n
is also a way of writing T. Since we have inserted one line, but removedtwo, we have written T with one less perspectivity. This is the mainpoint in the proof of the following theorem.
THEOREM. (Assuming Desargues' Theorem.) Any projectivity froma line l to a line 1'961 can be written as a product of two perspectivities.
There are two gaps in the above proof. First, there is the possibilitythat l* lies on Pt+2, so that we do not have perspectivities as indicated.To overcome this difficulty (supposing Pt}2 on l*), we change It+ias follows : Let I1+1' be a line through It+1 It+2, It+i' 96 It+1, 0It+a, and
let It+i' be not on Pt+i. In the part of (2) that reads ItPt+i
AI{+1
P"1t+2
Pt+i,
nPt+1 Pt+2
1t+insert It+i' to obtain It It+i 1t+i 62; and then apply the
previous lemma to remove It+, : in this way we change It+1 to It+i'. Atthe same time we get a new Pt+2 and a new l*. Why does not the newPt+2 he on the new 1* ? To answer this, let U = It It+1, V = 62 63 ;then U V under the given projectivity from It to It+3. ChangingIt+1 changes U but not V, so the new U does not go into V.
The other thing that remains to be proved is that there are, or maybe assumed to be, four lines in the position mentioned. Let us thenlook at 1, 11,12i I3. It may well be that 13 = 1, but we will now show thatT can be written with l3 j4 1. First, if in (1) we have n = 3, then 13 = l'and we were given 1'0 1, so 13 # 1: suppose, then, that n > 3 and that13 = 1. We may, of course, assume 12 0 13; were 12 =13, then l2 n 13 wouldbe the identity, and we could drop 12, thus shortening the product (1).Let now 1* be a line on 12.13, l* # l2, l* # I3, 1* not on P4. Then
12 P3 13P4
14 can be rewritten 12P3
13 P4 I* P4 l4, and then, by theA n n n n
lemma, rewritten as l2 n 1* n 14 : thus I* replaces 13, and since 13 = 1, wehave 1* 0 1. In short, the new l3 (i.e., l*) is different from 1. We nowproceed under the assumption 13 0 1. We already said that, for obviousreasons, we assume l2 13; also we assume 10 11 i 11 i412, as otherwise weobviously can simplify (1). It is quite possible, however, that 11=13:but if that is so, then just as previously we changed I3, so here we canchange 11. Thus we may assume 11:01s. We may then still have12=1, in which case we change 12. So now we may assume that 104,19612, 1013,11:012, l1 16I3i 12 # 13, i.e., 1, l1, 12, l3 are distinct. It remains
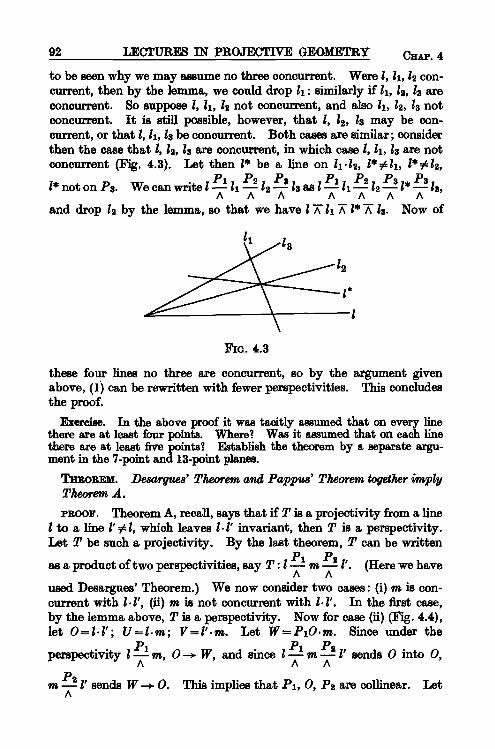
oar
e0+
coin
92 LECTURES IN PROJECTIVE GEOMETRY Cner. 4
to be seen why we may assume no three concurrent. Were 1, 11, l2 con-current, then by the lemma, we could drop 11: similarly if 11i 12, 13 areconcurrent. So suppose 1, 11, 12 not concurrent, and also 11, 12, 13 notconcurrent. It is still possible, however, that 1, 12i 13 may be con-current, or that 1, 11, 13 be concurrent. Both cases are similar; considerthen the case that 1, l2, is are concurrent, in which case 1, 11, 13 are notconcurrent (Fig. 4.3). Let then l* be a line on l1.12, l* # 11, 1* 96 12,
l* not on P2. We can write l Pl li f2 l2 Psis as 1
Pl11
P212 Ps I* Ps1s,
A A A A A A A
and drop l2 by the lemma, so that we have l 11 X 1* Is. Now of
FIG. 4.3
these four lines no three are concurrent, so by the argument givenabove, (1) can be rewritten with fewer perspectivities. This concludesthe proof.
Exercise. In the above proof it was tacitly assumed that on every linethere are at least four points. Where? Was it assumed that on each linethere are at least five points? Establish the theorem by a separate argu-ment in the 7-point and 13-point planes.
ThEo nM. Desargues' Theorem and Pappu8' Theorem together implyTheorem A.
PROOF. Theorem A, recall, says that if T is a projectivity from a lined to a line 1'941, which leaves 1.1' invariant, then T is a perspectivity.Let T be such a projectivity. By the last theorem, T can be written
as a product of two perspectivities, say T : l P1 m PZ 1'. (Here we have
used Desargues' Theorem.) We now consider two cases: (i) m is con-current with l 1', (ii) m is not concurrent with 1.1'. In the first case,by the lemma above, T is a perspectivity. Now for case (ii) (Fig. 4.4),let 0=1.1'; Let Since under the
perspectivity l Pl m, 0 -* W, and since l - m PZ l' sends 0 into 0,
m Pa 1' sends W -+ 0. This implies that P1, 0, P2 are collinear. Let
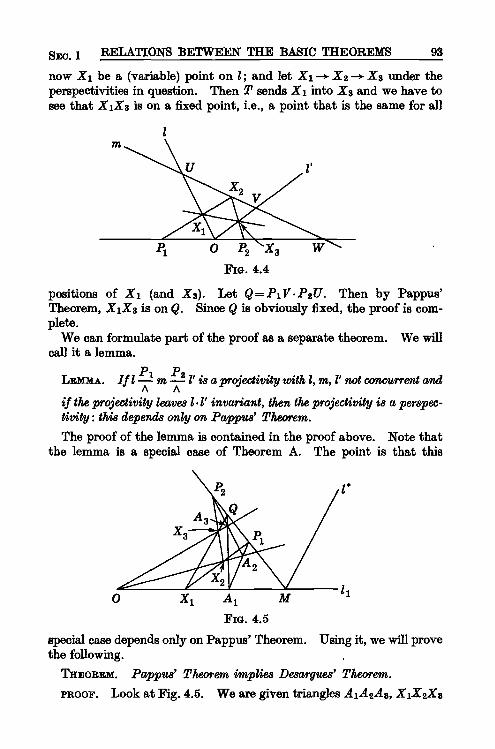
z..
SEC. 1 RELATIONS BETWEEN THE BASIC THEOREMS 93
now X1 be a (variable) point on 1; and let XI -- X2 -+ X3 under theperspectivities in question. Then T sends Xl into X3 and we have tosee that X1X3 is on a fixed point, i.e., a point that is the same for all
1
positions of X1 (and X3). Let Q = PlV P2U. Then by Pappus'Theorem, X 1X g is on Q. Since Q is obviously fixed, the proof is com-plete.
We can formulate part of the proof as a separate theorem. We willcall it a lemma.
LEMMA. If t - m P2 1 ' is a projectivity with 1, m, l' not concurrent and
if the projectivity leaves l l' invariant, then the projectivity is a perspec-tivity : this depends only on Pappus' Theorem.
The proof of the lemma is contained in the proof above. Note thatthe lemma is a special case of Theorem A. The point is that this
Al M
Fia. 4.5
special case depends only on Pappus' Theorem. Using it, we will provethe following.
THEOREM. Pappus' Theorem implies Desargues' Theorem.
PRooF. Look at Fig. 4.5. We are given triangles A1A2As, X1X2X3

cm'
cod
000
pro
.-.
Ix'
ti,
c3.
coo
00.
P',
...
0.'(
off RB
A
c0,
E-1
4)°
94 LECTURES IN PROJECTIVE GEOMETRY CHAr. 4
centrally perspective from 0, and wish to prove Pi, Q, P2 are collinear.We have to consider separately the possibilities (i) P2P1 passes through0, (ii) P2P1 does not pass through 0. We first consider case (ii) andthen come back to (i). Through M = P1P2 l1 take a line l*, l* li,
1* 9& P1P2i l* not on P2. Now T : ll P112 P2 13 can be written asn n
11PI
12 P2 I*P2
ls. By the last lemma, 11PI
12 P2 l* is a perspectivity.A n n n n
So T can be written llA
l*P2
13. Now T leaves O=11 is invariant:
this is given. So, again applying the last lemma, T is a perspectivity.This proves case (ii).
Now consider case (i). Observe that the points P1i P2, Q all playsimilar roles in the statement of Desargues' Theorem. If P1P2 goesthrough 0, we can try P1Q. If P1Q does not pass through 0, then weare through by case (ii). So suppose P1Q also passes through 0. Butthen certainly P1, P2, Q are collinear, and the proof is complete.
Since Pappus' Theorem implies Desargues' Theorem, we also havethat Pappus' Theorem implies Theorem A.
We are now going to prove that Theorem A implies the FundamentalTheorem. We have already seen that the Fundamental Theorem im-plies Theorem A: in fact, Theorem A is a special case of the FundamentalTheorem.
THEOREM. Any special case of the Fundamental Theorem implies theFundamental Theorem.
By a special case, we mean : given some lines 1, l' with A, B, C distinctpoints on 1, and A', B', C' distinct points on 1', there is just one pro-jectivity sending A, B, C, respectively, into A', B', C'. We have toprove that a similar situation obtains for any lines 1, 1', points A, B, Con l and A', B', C' on 1'. Suppose then that there are lines 1, withA, B, C (distinct) on 1, a', B', C' on 1', and two projectivities sendingA, B, C, respectively, into a'. B', C'. We will show that there alsoexist two projectivities sending A, B, C, respectively, into A', B', C'(Fig. 4.6).
To say that there are two projectivities V1, V2 sending A, B, C intoA', B', C', respectively, is to say that for some X, V 1 sends X into X 1',and V2 sends X into X2', where X 2' # X 1' (and also, of course, thatV1, V2 send A, B, C, respectively, into A', B', C'). Let now T be anyprojectivity sending A, B, C, respectively, into A, T3, 0, and let U beany projectivity sending a', B', C', respectively, into A', B', C'. LetT-1 be the projectivity that carries points of 1 back into the points of lfrom which they came under T. If T-1 sends X into X, then T sends
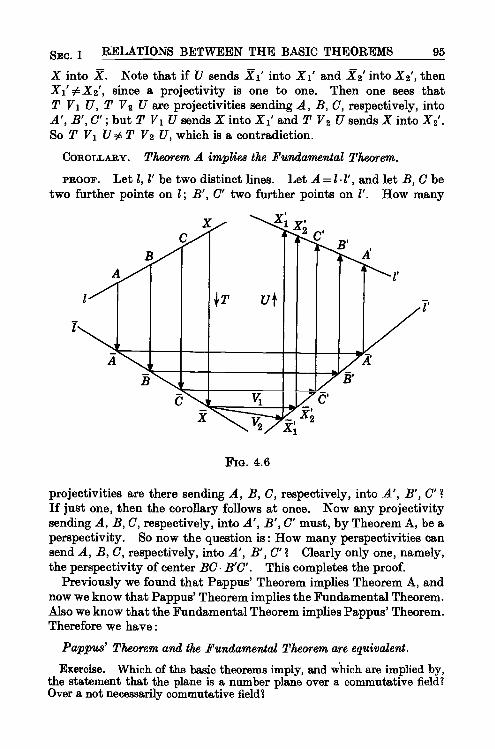
D-8
Ham
''
DA
D
SC
I
-¢°
Snc. 1 RELATIONS BETWEEN THE BASIC THEOREMS 95
X into X. Note that if U sends X 1' into X 1' and X2' into X2', thenX1' X2', since a projectivity is one to one. Then one sees thatT V, U, T V2 U are projectivities sending A, B, C, respectively, intoA', B', C'; but T V 1 U sends X into X 1' and T V2 U sends X into X2'.So T V 1 U T V2 U, which is a contradiction.
CORor.LARY. Theorem A implies the Fundamental Theorem.
PROOF. Let 1, l' be two distinct lines. Let A = l 1', and let B, C betwo further points on 1; B', C' two further points on 1'. How many
Fia. 4.6
projectivities are there sending A, B, C, respectively, into A', B', C'?If just one, then the corollary follows at once. Now any projectivitysending A, B, C, respectively, into A', B', C' must, by Theorem A, be aperspectivity. So now the question is : How many perspectivities cansend A, B, C, respectively, into A', B', C'? Clearly only one, namely,the perspectivity of center BC B'C'. This completes the proof.
Previously we found that Pappus' Theorem implies Theorem A, andnow we know that Pappus' Theorem implies the Fundamental Theorem.Also we know that the Fundamental Theorem implies Pappus' Theorem.Therefore we have :
Pappus' Theorem and the Fundamental Theorem are equivalent.
Exercise. Which of the basic theorems imply, and which are implied by,the statement that the plane is a number plane over a commutative field?Over a not necessarily commutative field?
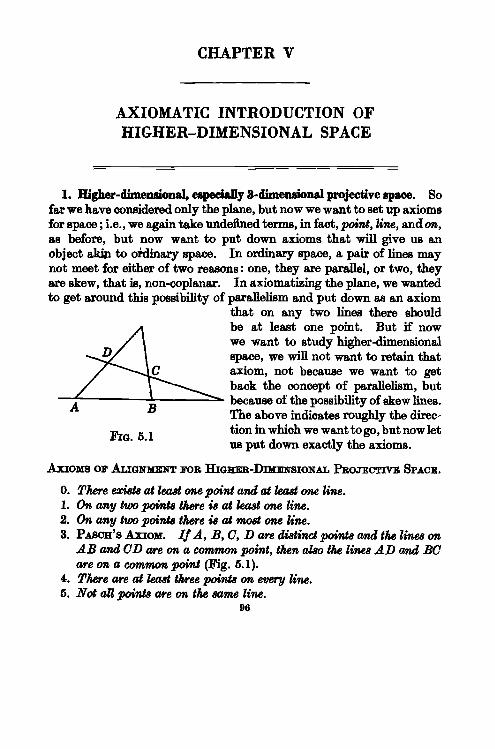
bum
`off
S'°
CHAPTER V
AXIOMATIC INTRODUCTION OFHIGHER-DIMENSIONAL SPACE
1. Higher-dimensional, especially 3-dimensional projective space. Sofar we have considered only the plane, but now we want to set up axiomsfor space ; i.e., we again take undefined terms, in fact, point, line, and on,as before, but now want to put down axioms that will give us anobject akin to ordinary space. In ordinary space, a pair of lines maynot meet for either of two reasons : one, they are parallel, or two, theyare skew, that is, non-coplanar. In axiomatizing the plane, we wantedto get around this possibility of parallelism and put down as an axiom
that on any two lines there shouldbe at least one point. But if nowwe want to study higher-dimensionalspace, we will not want to retain thataxiom, not because we want to getback the concept of parallelism, butbecause of the possibility of skew lines
B
FiG. 5.1
Tns above mdicates roughly the direc-tion in which we want to go, but now letus put down exactly the axioms.
Axioms of ALIGNMENT Fox HIGHER-DI INSloNAL PROJECTIVE SPACE.
0. There exists at least one point and at least one line.1. On any two points there is at least one line.2. On any two points there is at most one line.3. PAscH's Axiom. If A, B, C, D are distinct points and the lines on
AB and CD are on a common point, then also the lines AD and BCare on a common point (Fig. 5.1).
4. There are at least three points on every line.5. Not all points are on the same line.
96
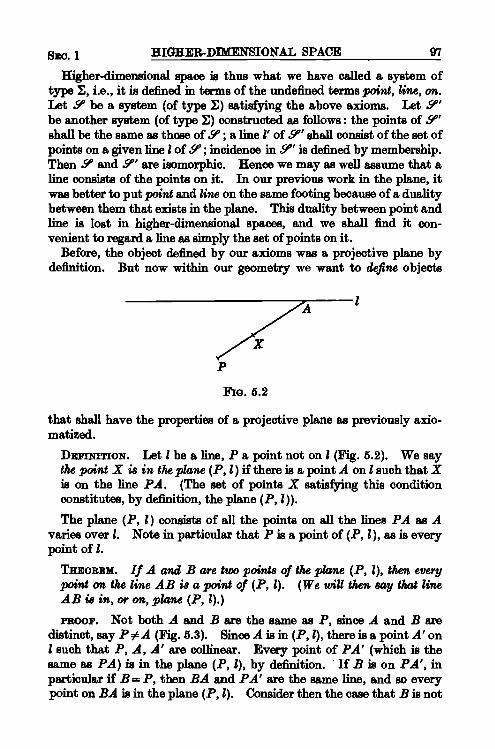
Suo. 1 HIGHER-DIMENSIONAL SPACE 97
Higher-dimensional space is thus what we have called a system oftype E, i.e., it is defined in terms of the undefined terms point, line, on.Let .9' be a system (of type E) satisfying the above axioms. Let So'be another system (of type E) constructed as follows : the points of 9'shall be the same as those of Y; a line 1' of .So' shall consist of the set ofpoints on a given line l of Y; incidence in 59' is defined by membership.Then .9' and .9' are isomorphic. Hence we may as well assume that aline consists of the points on it. In our previous work in the plane, itwas better to put point and line on the same footing because of a dualitybetween them that exists in the plane. This duality between point andline is lost in higher-dimensional spaces, and we shall find it con-venient to regard a line as simply the set of points on it.
Before, the object defined by our axioms was a projective plane bydefinition. But now within our geometry we want to define objects
l
P
Fia. 5.2
that shall have the properties of a projective plane as previously axio-matized.
DRFnNTroN. Let l be a line, P a point not on 1 (Fig. 5.2). We saythe point X is in the plane (P, l) if there is a point A on 1 such that Xis on the line PA. (The set of points X satisfying this conditionconstitutes, by definition, the plane (P, l)).
The plane (P, 1) consists of all the points on all the lines PA as Avaries over 1. Note in particular that P is a point of (P, 1), as is everypoint of 1.
TREoREM. If A and B are two points of the plane (P, l), then everypoint on the line AB is a point of (P, l). (We will then say that lineAB is in, or on, plane (P, d).)
PnooF. Not both A and B are the same as P, since A and B aredistinct, say P # A (Fig. 5.3). Since A is in (P, 1), there is a point A' onl such that P, A, A' are collinear. Every point of PA' (which is thesame as PA) is in the plane (P, 1), by definition. 'If B is on PA', inparticular if B = P, then BA and PA' are the same line, and so everypoint on BA is in the plane (P, 1). Consider then the case that B is not
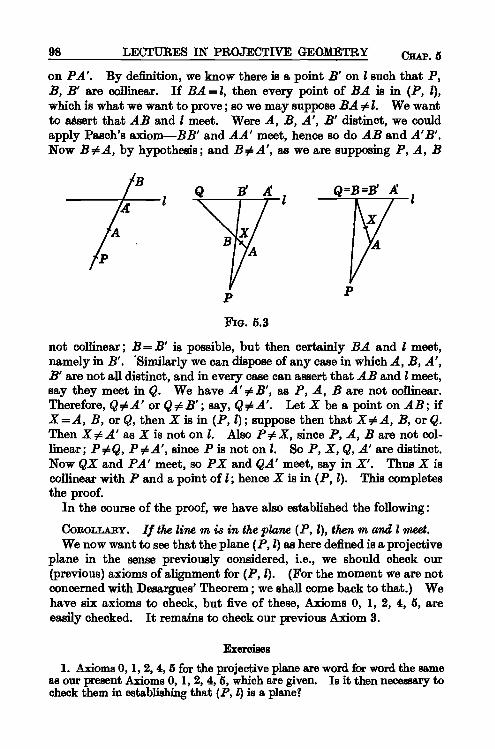
coq
518
-.p
mom
`
spa
III
;r'
CT'
`°W
"
98 LECTURES IN PROJECTIVE GEOMETRY CHAP. 5
on PA'. By definition, we know there is a point B' on l such that P,B, B' are collinear. If BA = 1, then every point of BA is in (P, 1),which is what we want to prove ; so we may suppose BA # 1. We wantto assert that AB and l meet. Were A, B, A', B' distinct, we couldapply Pasch's axiom-BB' and AA' meet, hence so do AB and A'B'.Now B # A, by hypothesis ; and B # A', as we are supposing P, A, B
not collinear ; B = B' is possible, but then certainly BA and 1 meet,namely in H. 'Similarly we can dispose of any case in which A, B, A',B' are not all distinct, and in every case can assert that AB and l meet,say they meet in Q. We have A' O B', as P, A, B are not collinear.Therefore, QA' or Q # B' ; say, Q O A'. Let X be a point on AB ; ifX =A, B, or Q, then X is in (P, 1) ; suppose then that X :O A, B, or Q.Then X 0 A' as X is not on 1. Also P # X, since P, A, B are not col-linear; POQ, P#A', since P is not on 1. So P, X, Q, A' are distinct.Now QX and PA' meet, so PX and QA' meet, say in X'. Thus X iscollinear with P and a point of 1; hence X is in (P, 1). This completesthe proof.
In the course of the proof, we have also established the following :
COROLLARY. If the line m is in the plane (P, 1), then m and l meet.We now want to see that the plane (P, 1) as here defined is a projective
plane in the sense previously considered, i.e., we should check our(previous) axioms of alignment for (P, 1). (For the moment we are notconcerned with Desargues' Theorem; we shall come back to that.) Wehave six axioms to check, but five of these, Axioms 0, 1, 2, 4, 5, areeasily checked. It remains to check our previous Axiom 3.
Exercises
1. Axioms 0, 1, 2, 4, 5 for the projective plane are word for word the sameas our present Axioms 0, 1, 2, 4, 5, which are given. Is it then necessary tocheck them in establishing that (P, 1) is a plane?
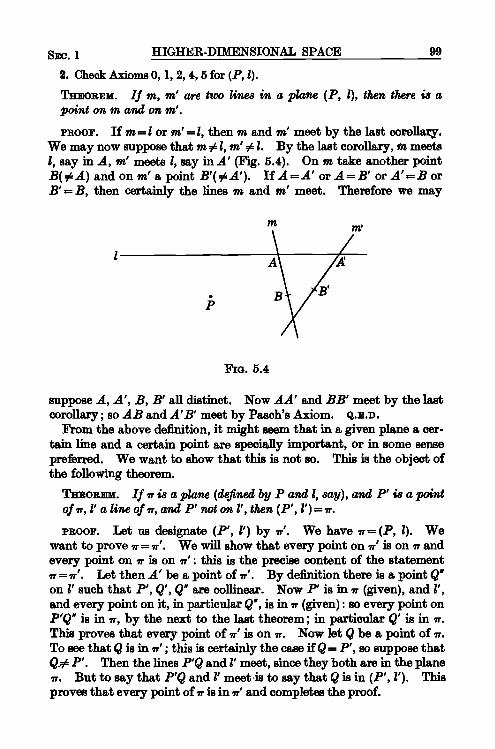
SEC. 1 HIGHER-DIMENSIONAL SPACE 99
2. Check Axioms 0, 1, 2, 4, 5 for (P, 1).
THEOREM. If m, m' are two lines in a plane (P, 1), then there is apoint on m and on W.
PROOF. If m =1 or W= 1, then m and m' meet by the last corollary.We may now suppose that m 0 1, W o 1. By the last corollary, m meets1, say in A, m' meets 1, say in A' (Fig. 5.4). On m take another pointB(# A) and on W a point B'(#A'). IfA=A'orA=B'orA'=B orB' = B, then certainly the lines m and m' meet. Therefore we may
1
FIG. 5.4
suppose A, A', B, B' all distinct. Now AA' and BB' meet by the lastcorollary; so AB and A'B' meet by Pasch's Axiom. Q.E.D.
From the above definition, it might seem that in a given plane a cer-tain line and a certain point are specially important, or in some sensepreferred. We want to show that this is not so. This is the object ofthe following theorem.
THEOREM. If it is a plane (defined by P and 1, say), and P' is a pointof ir, l' a line of zr, and P' not on 1', then (P', l') = ir.
PROOF. Let us designate (P', 1') by ir'. We have it=(P, 1). Wewant to prove it = ir'. We will show that every point on 7r' is on it andevery point on 7r is on ir': this is the precise content of the statementit = ir'. Let then A' be a point of 7r'. By definition there is a point Q'on l' such that P', Q', Q" are collinear. Now P' is in 7r (given), and 1',and every point on it, in particular Q', is in 7r (given) : so every point onP'Q" is in ir, by the next to the last theorem ; in particular Q' is in ir.This proves that every point of ir' is on 7r. Now let Q be a point of ir.To see that Q is in ir'; this is certainly the case if Q = P', so suppose thatQ.# P'. Then the lines P'Q and 1' meet, since they both are in the planeir. But to say that P'Q and 1' meet is to say that Q is in (P', 1'). Thisproves that every point of it is inir' and completes the proof.
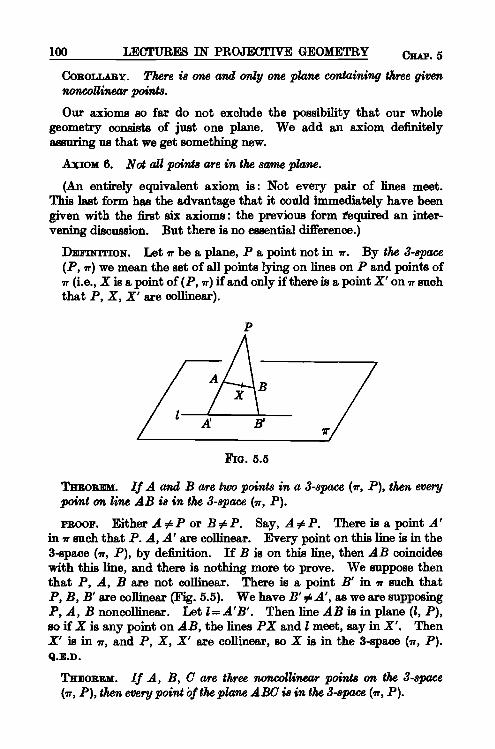
°'d...
bbd
100 LECTURES IN PROJECTIVE GEOMETRY CH". 5
CoRora.uRY. There is one and only one plane containing three givennoncollinear points.
Our axioms so far do not exclude the possibility that our wholegeometry consists of just one plane. We add an axiom definitelyassuring us that we get something new.
AxIOM 6. Not all points are in the same plane.
(An entirely equivalent axiom is : Not every pair of lines meet.This last form has the advantage that it could immediately have beengiven with the first six axioms : the previous form required an inter-vening discussion. But there is no essential difference.)
DEFINITION. Let it be a plane, P a point not in ir. By the 3-space(P, ir) we mean the set of all points lying on lines on P and points ofit (i.e., X is a point of (P, ir) if and only if there is a point X' on 7r suchthat P, X, %' are collinear).
Fio. 5.5
THEOREM. If A and B are two points in a 3-space (ir, P), then everypoint on line AB is in the 3-space (a, P).
PRooir. Either A:0 P or B:0 P. Say, A:0 P. There is a point A'in it such that P. A, A' are collinear. Every point on this line is in the3-space (w, P), by definition. If B is on this line, then AB coincideswith this line, and there is nothing more to prove. We suppose thenthat P, A, B are not collinear. There is a point B' in Tr such thatP, B, B' are collinear (Fig. 5.5). We have B' & A', as we are supposingP, A, B noncollinear. Let l=A'B'. Then line AB is in plane (1, P),so if X is any point on AB, the lines PX and l meet, say in X'. Then%' is in nr, and P, X, %' are collinear, so % is in the 3-space (Ir, P).Q.E.D.
THEOREM. If A, B, C are three noncollinear points on the 3-spaceOr, P), then every point of the plane ABC is in the 3-space (Ir, P).

erg
...°°
'gy
p'
IoM
.'.O
S" yea
e0+
"_b
mid
'.v°.
.
"r3
Ir.
'."
;.ti.Q0.'
.m;
G+
"0.i
Pom
p'O
..parm
ar'W
'
ti'.:°
SEC. 1 HIGHER-DIMENSIONAL SPACE 101
PRooF. Let % be a point in the plane A, B, C. We may supposeX e A. Then AX and BC meet, say in Y. Now Y is in (n, P) by theprevious theorem, and now one can assert that X is in (n, P), again bythe previous theorem.
Just as no line or point is preferred in a plane, so in a 3-space there isno preferred plane or point, in spite of the definition, which appears togive such a preference. The following theorem shows this.
TEuonEM. Let V be a 3-space (defined by n and P, say), and P' apoint of V, a' a plane of V, and P' not on n', then (n', P') = V.
PROOF. Let us designate (Tr', P') by V'. Let Q' be a point of V.Then there is a point Q" on n' such that P', Q', Q' are collinear. NowP', Q" are in V, so Q' is in V by a previous theorem. This shows thatevery point of V' is in V. It does not follow "similarly," that everypoint of V is in V', i.e., V, V' do not enter into the argument symmetric-ally. If we knew that P and n were in V', then we could say, similarly,that every point of V is in V. We proceed, then, to prove this, butfirst will consider two special cases : (a) n = ,, (b) P = P'.
Case (a). Here we are given IT = n', and would have nothing to proveif P = P'; we suppose, then, that P 0 P'. We want to show that P isin V' = (7r'; P'). Since P' is in V, there is a point P" inn such thatP, F', P" are collinear. But this also shows that P is in (n, P'), whichis V'.
Case (b). Here we are given P=P' and will suppose or . Wewant to show that n is in V' (ir', F'). Let A', B', C' be three non-eollinear points in ff'. Let A", B", C" be in n ; P', A', A" collinear ;P', B', B" collinear ; P', C', C" collinear : the points A", B", C" existsince nr' is in V. Now A", B", C" could not be collinear, since if theywere collinear, the plane containing them and P' would contain A', B',U; this is impossible, since the one and only plane containing A', B', C'is Ir' and P' is not on n'. Now A", B", C" are in V', so the plane onthem, i.e., n, is also in V.
Consider now any situation. We may, and will, suppose n 34 nr' andPOP'. It is possible that P is on n' and P' on n, but suppose that isnot the case, at first, and we shall come back to this possibility. Saythat P is not on vr'. Then (n, F) _ (jr', P), by case (b), and (n', P) =(n', P') by case (a), so (n, P) = (n', P'). Similarly if P' is not on n.Finally consider the case that P is on nr' and P' on n. The line PP'is not on n, since P is not on IT, and it is not on ir', since P' is not on n'.So PP' has no point in common with n but P, and, no point in commonwith i7 but P'. Let P" be a point on PP', P 0 P", P' O P". ThenOr, P) = (n, P") = (n', P") = (n', P'). This completes the proof.
sib
'7'
c°9
yea
per=
ti,
ma,
102 LECTURES IN PROJECTIVE GEOMETRY CaAP 5
THEOREM. If it and l are a plane and a line in a 3-space V, then 7rand 1 meet.
PRooF. If t is in 7r, there is nothing to prove, so suppose l is not in ir.Let P be a point of l not in ir. We may use a and P to define V, i.e.,by the last theorem V = (7r, P). Let now P be another point of 1,i.e., PO P. Since l is in V, so is P'; hence, by definition of (ir, P),there is a point P" in 7r such that P, P', P" are collinear. Thus lmeets 7r in P'. Q.E.D.
THEOREM. If 4r, ir' are distinct planes in a 3-8pace V, then it and ir'meet in a line.
PROOF. Let P be a point of ir' not in ir. Then V = (ir, P). Let Abe a point of ,r', A # P. Then there exists a point A* in it such thatP, A, A* are collinear. Let B be a point of Ir', B not on PA. Thenthere exists a point B* in 7r such that P, B, B* are collinear. More-over, B* O A*, since B is not on PA. The line A*B* is on both it andir'. Q.E.D.
We may still point out explicitly that if not all points are in the sameplane (Axiom 6), then every plane is Desarguesian; the proof is alongthe lines of one of our proofs at the beginning of the book, but now, ofcourse, could be given in an entirely rigorous manner.
Later we will continue the study of higher-dimensional space. Mean-while we mention that 4-space may be defined as a system of type Econsisting of all the points on all the lines joining the points of a 3-spaceto a point not in the 3-space, together with the lines on the pairs of thesepoints. Similarly 5-space can be defined ; and, by induction, n-space.
Exercises
1. Develop the geometry of 4-dimensional space. In particular show thattwo planes meet in one and only one point if and only if they are not togetherin some 3-space.
2. The analytic model. Let F be a field, not necessarily commutative.Define a point to be a (n+ 1)-tuple (xo, , x.), n> 2, of elements from Ftogether with all of its right multiples, (xoa, , A in F, A # 0; and definea line as all right linear combinations (xoA+ yop, , x,,.1 + ynµ) 54 (0,. , 0) oftwo (n + 1)-tuples (xo, , x,,), (yo,, , y,), neither of which is a right multipleof the other. Show that with these definitions we get a model of our system.This standard model will be called PFn (=projective number space over Fof dimension n).
2. Desarguesian planes and higher-dimensional space. We havealready observed that if space is more than 2-dimensional, i.e., if not all
-yam
f+,
,4.
(OD
f+,
0b°
4 F`
'f3
+ch
i'--
d.+
,
O+
,co
w
...C
-4
r°+
,
coo
CD
,m
ss'
Cc!
'-!'T
3
''a
P''
'LS
:3'
;:;u.el
.b'0.i
.-.
r.4
fir
SirP.,
0.1-4-
...
.+1
.+y
F.'...
¢+m
cabjai
P-1
fi,
..:.F
,
,5,,"
SEc. 2 HIGHER-DIMENSIONAL SPACE 103
points lie in a plane, then Desargues' theorem holds, whence everyplane of space is Desarguesian. Conversely, every Desarguesian planeis part of a 3-space. In fact, let it be a Desarguesian plane. Then wecan coordinatize it by means of a not necessarily commutative field F.The points of Tr then become triples (xo, X1, x2), not all x{ = 0, togetherwith all multiples (xoA, x1A, x2A), A O 0. Using a notation introduced inthe last exercise, we see that it is isomorphic to PF2. Now consider thestandard analytic model PF3: this consists of classes of quadruples(xo, X1, x2, x3) as points, and of lines as previously defined. In PF3consider all the points in which the representatives have the fourthentry equal to zero. If one makes P(xo, xi, x2, 0) correspond toP(xo, x1, x2) (and similarly with lines), then one sees that PF3 containsa plane isomorphic with PF2 and hence with ir. This shows that it isisomorphic with a plane f1 of PF3. By a technique into the details ofwhich we will not enter, we remove irl from PF3 putting jr in its place:the result is a 3-space containing it as a part.
Later we will resume the study of higher-dimensional spaces, butthere is one further point that we can conveniently take up here, andthat is the introduction of coordinates. Since in the plane this dependedon Desargues' Theorem, and here we have Desargues' Theorem, weshould perhaps expect no essential difficulty, and this, in fact, with ourprevious work, is so. Still there is a technical detail or two worthexamining.
It is not difficult to show that any two 3-spaces each of which hasjust three points per line are isomorphic, hence isomorphic to PF3,where F is the field of two elements ; hence such 3-spaces can be coor-dinatized. In what follows we suppose that every line contains at leastfour points.
By an affine 3-space one means a system of type E obtained from aprojective 3-space by deletion of a 2-dimensional subspace : i.e., if S is3-dimensional and H is a 2-dimensional subspace, an affine 3-space A isobtained by defining the points of A to be those of S - H ; a line l of Ato be a line 1' of S, not in H, minus I'. H ; and P incident with l if andonly if P is incident with the (corresponding) 1'. Every affine 3-spacecan (by definition) be obtained in this way.
THEOREM. Let A be an affine 3-space with each line containing at leastthree points. Then to A it is possible to adjoin "ideal" points, one perline, to obtain a projective 3-space S in which the adjoined points forma 2-dimensional subspace H of S and such that A can be obtained from Sby deletion of H ; and this can be done in only one way.
moor. By definition, A is obtained from a 3-space S by deletion ofa 2-space H, from which it is clear that the ideal points can be adjoined
17'
9".
o-+
,
Cry
'ti
c,-
C-0
-2T
C7'
'"J
i"3
°+,p
coo
tam
".'
...n,^
0.i
0.'
anti
-45
0.'¢'b
0.'t14
o.-
°'h6
p0+'
L".
t",t"+
99??
104 LECTURES IN PROJECTIVE GEOMETRY CHAP. 5
in at least one way : the main point is to see that this adjunction can bemade in only one way.
Let A be obtained from S by deletion of H and from S' by deletionof H'. To each point P of S we will associate a point P' of S', eachpoint of A being associated with itself, in such way that collinear pointsof S will correspond to collinear points of S', and vice versa ; and we willshow that this can be done in only one way.
Let P be a point of H, l a line through P, l not in H. To l correspondsa line l of A ; and to l corresponds a line l' of S'; this line l' cuts H' in apoint P'. If collinearity is to be preserved, one must associate P' withP. This gives the uniqueness of our procedure.
Let l1 be a second line through P (giving rise via 11 to 11' in S'). Inthe plane of l and 11 take a point Q not on H, 1, or 11: here we use the factthat there are at least three points on every line of A, hence at leastfour on every line of S. On Q take two lines cutting l and l1 in R, S, T,U, none in H. Using Pasch's axiom, one sees that l' and 11' must meet,in fact, in P'. To P we associate P', and the present argument showsthat P' depends only on P, not on a special line chosen through P.
Let now P, Q, B be three collinear points of S. If all of them are in A,then clearly collinearity is preserved. We suppose, then, that just oneor all three of P, Q, R are in H. In the first case, we see by definitionof P' that P', Q, R are collinear. In the second case, let 0 be a point ofA and in the plane OPQR take a line not through 0, P, Q, R, cuttingOP in Pl, OQ in Ql, OR in R1. Then P', Q', R' lie in H' and in planeOP1Q1R1, whence .P', Q', 1?' are collinear. The same argument showsthat if P', Q', R' are collinear, then P,' Q, R are collinear, hence ifP, Q, R are not collinear, then P', Q', B' are not collinear. The proofis now complete.
REMARK. In the case that each line of A has just two points, thepreceding theorem is false.
TuxoREM. Every projective 3-space is isomorphic to a PF3.
PROOF. Fix four points 0, 12, S2', Q", no three of which are coplanar.Space minus the plane flf2' l" will turn out to be an affine 3-space withOQ, Oil', Oil" as, respectively, x, y, z axes. On Oil, Oil', Oil" we fixthree points E, E', E" as "unit" points. Let the plane of EE'E" meetQhI12" in the line m. On OEi1 fix coordinates as explained in our workon planes. Then using the pencil of planes through m, map the fieldof line OES2 onto the lines OE12' and OE"S2" (in our work on planes, wemapped the field on OES2 onto the field on OE'S2' by means of the pencilof lines on EE' il'). Since corresponding elements of the fields onthe three axes are out out by a single plane on m, the three axes enter
'`C
to.
°'L3
'b,
tap
°.adam
6i'..r ..,
tea;
e''
bas
SEC. 2 HIGHER-DIMENSIONAL SPACE 105
symmetrically into our considerations. In analogy with the procedurein the plane case, we identify the fields on the three axes : one and thesame field F is imagined as spread out on the three axes ; and if Cis the field element of a point P on Oil (different from 11), then C isalso the field element for the points cut out on O11', O12" by the planethrough m and P.
Let a plane through 11'12" cut 011 in a point with associated fieldelement C ; then we give each point of this plane a first coordinate,namely, C. Similarly we give every point of space minus plane 1111'12"a second and third coordinate.
Let l be a line not in plane 1111'12". We seek conditions on thecoordinates x, y, z of a point in order that the point He on 1. The line lcannot meet all three sides of 1111'1", say it does not meet 1211'. From12 project l onto plane 011"12', getting line 11; and from 12' project lonto plane O0"11, getting line 12. The projection of (x, y, z) from 11onto plane O0"11' is (0, y, z). Taking, as we may, the last two coordi-nates as coordinates in plane 012"12', we see that equation of 11 is :
(1) ay+bz+c = 0.Similarly, in OS1"11 we find as equation of 12:
(2) dx+ez+f = 0.Since l does not meet 1211', line 11 does not pass through 11', whencea 0 0 ; similarly d :A 0. Solving (1) and (2) for y and x (and writing tfor z), we see that all the points (x, y, z) of l (not on plane 1112'11") areobtained from equations
(3) X = xo+uty = yo+vtz = zo + wt, not all u, v, w = 0,
by assigning values to t. Moreover, every value oft (i.e., of z) yields apoint of 1; (namely, fixing z arbitrarily, we solve for y and x from (1)and (2) and make use of the fact that l is the intersection of planes (1)and (2)). Introducing homogeneous coordinates we see that the pointsof l are given by all right linear combinations (1, xo, yo, zo)A + (0, u, v, w)µof (1, xo, yo, zo) and (0, u, v, w) with A # 0. Conversely, any such set ofright linear combinations of (1, xo, yo, zo) and (0, u, v, w) arise from aline.In this way we see that space minus plane 1211'11" is isomorphic to aPFs minus the plane xo = 0 (the locus xo = 0 is a plane). Applying thepreceding theorem, we conclude that every 3-space is isomorphic toa PF2.
...
Roc C
)-pap
+`Q
4N,
oar.
'LS
dimb4c
Off'.4a
CHAPTER VI
CONICS
1. Study of the conic on the basis of high school geometry. We havenow laid a firm axiomatic foundation for projective geometry and wantto pursue geometry as a strictly deductive discipline. To do this, eachnew object introduced must be defined in terms of things previouslydiscussed. We want now to introduce conics, and will, in a little while,define them in terms of projectivities, but if we do this right away, thedefinition will appear as a mystery. We prefer to start with what isfamiliar, even if not rigorously conceived, and later make the con-siderations rigorous. This does not mean that we abandon our axio-matic foundation, but simply that we put it aside temporarily.
We take the circle as our starting point. Since we are interested onlyin projective properties, however, the projection of a circle r from oneplane 7r to another planer' yields a curve F' in ?r' that should claim asmuch of our attention as the circle P ; similarly, the projection from 7r'to a third plane ir" yields a curve r,, and the properties of r that interestus are also properties of r; and so on for further projections. Wetherefore lay down the following definition.
DEFn ITioN. A conic is a figure obtained from a circle by a productof a finite number of projections.
Note that a figure obtained from a conic by projection is also a conic.Let A be a point on a circle P. Every line through A with one excep-
tion cuts 1' in exactly one more point. Hence we get the followingprojective theorem.
THEOREM. Let r be a conic, A a point on r. Every line through Awith one exception cuts Pin exactly one more point.
DEiNrrtoN. The exceptional line through A is called the tangentto r at A.Let r be a circle, and A a point on P. Let 1, m be lines through A
cutting r in points B, C. The circle r, lines 1, m, and points A, B, and106
6'4b
'IV
cad
'ca'p^
C/1
tap
tai
SEC. 1 CONICS 107
C are in the ordinary Euclidean plane. If this plane is Tr and B, C aretaken on the vanishing line of a projection to a second plane w', thenthe images 1', m' of 1, m will pass through A', the image of A, but willnot again out r,, the image of r. This is a type of difficulty we havealready encountered at the beginning of the book and we know it is notserious : we can either introduce ideal points in both I' and r, in orderto get around the difficulty, or we can simply dismiss such difficultieson the ground that for the time being we are not concerned with rigor.
Let A, B be two points on a circle P. We recall the property of acircle that states that angle APB is constant as P varies on r : at leastthis is true if P remains on one of the arcs bounded by A and B; and ifP passes to the other are, then angle APB passes into its supplement.Hence we can say that the sine of angle APB remains constant. Wecan also allow P =A if by PA we mean, as we shall, the tangent to rat A.
Let now A, B, C, D be four points on a circle r, and let P be a variablefifth point on P. Since
R(PA, PB; PC, PD) = sin CPA /sin DPAsin CPB sin DPB'
we see that R(PA, PB; PC, PD) remains constant as P varies over thecircle. Since cross-ratio is invariant under projection, we have thefollowing theorem.
THEOREM. Let r be a conic, A, B, C, D four points thereon; and let Pbe a variable fifth point on r. Then R(PA, PB; PC, PD) remainsconstant as P varies over the conic P.
Let r be a circle, and A, B, C, D, P five points on P. Let
R(PA, PB; PC, PD) = k.
If Q is on r, then we know that R(QA, QB ; QC, QD) = k. What if Qis not on r? Is it then true that R(QA, QB ; QC, QD) k ? Theanswer is yes. To prove this, suppose otherwise and consider thelines QA, QB, QC, QD (Fig. 6.1). The point Q is on at most one of thesides of the complete quadrangle ABCD, so we may suppose (by chang-ing the lettering if necessary) that Q is not on AB or CD. Since from Qone can draw at most two tangents to r, at least one of the lines QA,QB, QC, QD is not a tangent ; say, QC is not a tangent. Since QC is nota tangent, QC cuts r in a second point R ; and R 0 D since Q is not onCD. Since R is on r we have
R(RA, RB; RC, RD) = R(PA, PB; PC, PD) = R(QA, QB; QC, QD).
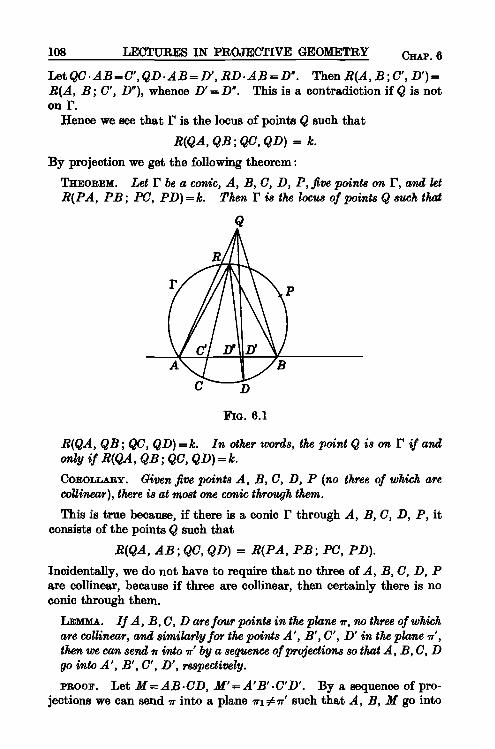
bop
108 LECTURES IN PROJECTIVE GEOMETRY CHAP. 6
Then R(A, B; C', D')=R(A, B; C', D"), whence D' = If. This is a contradiction if Q is noton r.
Hence we see that r is the locus of points Q such that
R(QA, QB ; QC, QD) = k.
By projection we get the following theorem :
THEOREM. Let r be a conic, A, B, C, D, P, five points on r, and letR(PA, PB ; PC, PD) = k. Then r is the locus of points Q such that
Q
D
FIG. 6.1
R(QA, QB ; QC, QD) = k. In other words, the point Q is on r if andonly if R(QA, QB ; QC, QD) = k.
COROLLARY. Given five points A, B, C, D, P (no three of which arecollinear), there is at most one conic through them.
This is true because, if there is a conic r through A, B, C, D, P, itconsists of the points Q such that
R(QA, AB; QC, QD) = R(PA, PB ; PC, PD).
Incidentally, we do not have to require that no three of A, B, C, D, Pare collinear, because if three are collinear, then certainly there is noconic through them.
LEMMA. If A, B, C, D are four points in the plane ir, no three of whichare collinear, and similarly for the points A', B', C', D' in the plane ir',then we can send 77 into ir' by a sequence of projections so that A, B, C, Dgo into A', B', C', D', respectively.
PROOF. Let M=AB.CD, By a sequence of pro-jections we can send 7r into a plane 7rl 0 ir' such that A, B, M go into
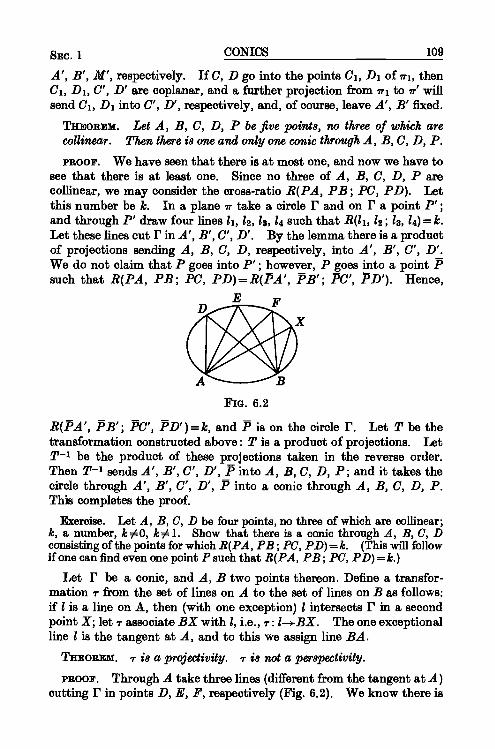
co.
SEC. 1 CONICS 109
A', B', M', respectively. If C, D go into the points Ci, D1 of 7r1, thenC1, Dl, C', D' are coplanar, and a further projection from ir, to ir' willsend C1, D1 into C', D', respectively, and, of course, leave A', B' fixed.
TBEOREM. Let A, B, C, D, P be five points, no three of which arecollinear. Then there is one and only one conic through A, B, C, D, P.
PROOF. We have seen that there is at most one, and now we have tosee that there is at least one. Since no three of A, B, C, D, P arecollinear, we may consider the cross-ratio R(PA, PB; PC, PD). Letthis number be k. In a plane in take a circle r and on r a point P;and through P draw four lines 11, 12, 1g, 14 such that R(11, 12; 13, 14) = k.Let these lines cut r in A', B', C', Y. By the lemma there is a productof projections sending A, B, C, D, respectively, into A', B', C, Y.We do not claim that P goes into P; however, P goes into a point Psuch that R(PA, PB ; PC, PD) = R(PA', PB'; PC', PD'). Hence,
FIG. 6.2
R(PA', PB'; PC', PD') = k, and P is on the circle P. Let T be thetransformation constructed above : T is a product of projections. LetT-1 be the product of these projections taken in the reverse order.Then T-1 sends A', B', C', D', P into A, B, C, D, P ; and it takes thecircle through A', B', C', D', P into a conic through A, B, C, D, P.This completes the proof.
Exercise. Let A, B, C, D be four points, no three of which are collinear;k, a number, k 0 0, k 0 1. Show that there is a conic through A, B, C, Dconsisting of the points for which R(PA, PB ; PC, PD)=k. (This will followif one can find even one point P such that R(PA, PB ; PC, PD) = k.)
Let r be a conic, and A, B two points thereon. Define a transfor-mation r from the set of lines on A to the set of lines on B as follows:if 1 is a line on A, then (with one exception) l intersects r in a secondpoint X; let r associate BX with 1, i.e., r: I-.BX. The one exceptionalline 1 is the tangent at A, and to this we assign line BA.
THEOREM. r is a projectivity. r is not a perspectivity.
PROOF. Through A take three lines (different from the tangent at A)cutting r in points D, E, F, respectively (Fig. 6.2). We know there is
It-.mgt
-.:
a''
4-P4per''
110 LECTURES IN PROJECTIVE GEOMETRY CHAP 6
one and only one projectivity sending lines AD, AE, AF, respectively,into lines BD, BE, BF; call this projectivity T. (Since r sends AD,AE, AF, respectively, into lines BD, BE, BE, if we can prove thetheorem at all, we must have r = z.) Let now l be any other line throughA ; l cuts r in a second point X. We claim z : AX -+ BX. To see this,let f : AX --> m and recall that
R(AD, AE ; AF, AX) = R(BD, BE ; BE, m),
since T is a projectivity and projectivities preserve cross-ratio. Butwe also have, by a proved property of conics, R(AD, AE ; AF, AX) _R(BD, BE ; BF, BX ). Hence, m = BX, i.e., T : AX PBX ; but this isjust the definition of T, namely, r : AX -+ BX. Hence, T = z. Since fis a projectivity by construction, T is a projectivity. To see that T isnot a perspectivity, recall explicitly the definition of a perspectivitybetween two pencils : a perspectivity between pencils at A and at B isdetermined by means of an axis of perspectivity a ; and correspondinglines on A and B meet on a, hence the locus of intersections of thecorresponding lines is a line. That is not the case with T, since D, E,F are not collinear ; hence, ,r is not a perspectivity.
NOTATION. The above theorem determines for any conic r anddistinct points A, B on r a projectivity r. Designate this projectivityas follows: T=T(r; A, B).
THEOREM. Let A, B be two distinct points, T a projectivity between thepencils at A and at B, T not a perspectivity. Then there exists a conic rsuch that T=T(r; A, B).
pRoop. Consider the locus of intersections of corresponding lines onA and B (i.e., lines corresponding under T). Of these, take three pointsD, E, F distinct from A, B. Let r be the conic through A, B, D, E, F.Let Tl =T(r ; A, B). Since T and Tl both send AD, AE, AF, respec-tively, into BD, BE, BE, we have T=T1 and T=T(r; A, B).
COROLLARY. The conic r of the theorem is uniquely determined.
The last two theorems will motivate the definition of conic in theaxiomatic treatment to be taken up in a moment. Before doing that,we still want to prove a famous theorem of Pascal on hexagons inscribedin a conic ; later we shall prove the theorem again from the axioms.
PASCAL'S THEOREM. The intersections of the opposite sides of ahexagon inscribed in a conic are collinear (Fig. 6.3).
PROOF. Let r be the given conic, A, B, C, D, E, F the successivevertices of the given inscribed hexagon. We are to prove that AB DE,
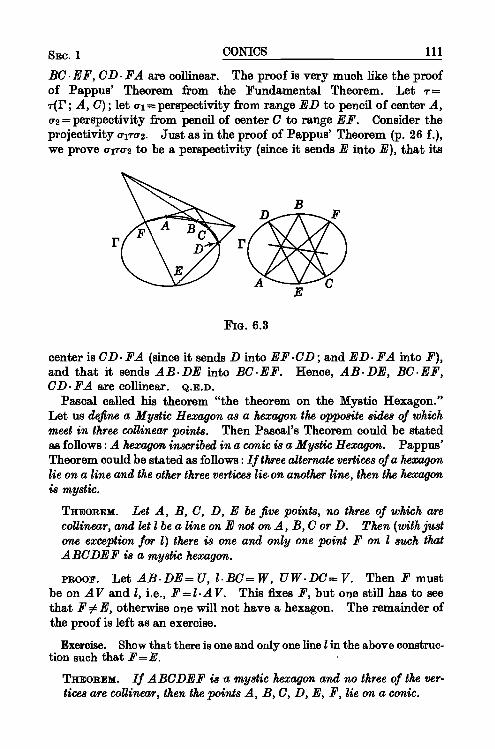
ti!
`,a
...
Cry may
cwt
s°.
SEC. 1 CONICS 111
BC EF, CD FA are collinear. The proof is very much like the proofof Pappus' Theorem from the Fundamental Theorem. Let T =T([' ; A, C) ; let a1= perspectivity from range ED to pencil of center A,a2 = perspectivity from pencil of center C to range EF. Consider theprojectivity a1Ta2. Just as in the proof of Pappus' Theorem (p. 26 f.),we prove a1T0`2 to be a perspectivity (since it sends E into E), that its
FIG. 6.3
center is CD- FA (since it sends D into EF -CD; and ED. FA into F),and that it sends AB-DE into BC EF. Hence, AB-DE, BC EF,CD. FA are collinear. Q.E.D.
Pascal called his theorem "the theorem on the Mystic Hexagon."Let us define a Mystic Hexagon as a hexagon the opposite sides of whichmeet in three collinear points. Then Pascal's Theorem could be statedas follows : A hexagon inscribed in a conic is a Mystic Hexagon. Pappus'Theorem could be stated as follows : If three alternate vertices of a hexagonlie on a line and the other three vertices lie on another line, then the hexagonis mystic.
THEOREM. Let A, B, C, D, E be five points, no three of which arecollinear, and let l be a line on E not on A, B, C or D. Then (with justone exception for 1) there is one and only one point F on l such thatABCDEF is a mystic hexagon.
PROOF. Let AB. DE = U, 1. BC = W, UW DC = V. Then F mustbe on AV and 1, i.e., This fixes F, but one stillhas to seethat F 0 E, otherwise one will not have a hexagon. The remainder ofthe proof is left as an exercise.
Exercise. Show that there is one and only one line l in the above construc-tion such that F=E.
THEOREM. If ABCDEF is -a mystic hexagon and no three of the ver-tices are collinear, then the points A, B, C, D, E, F, lie on a conic.
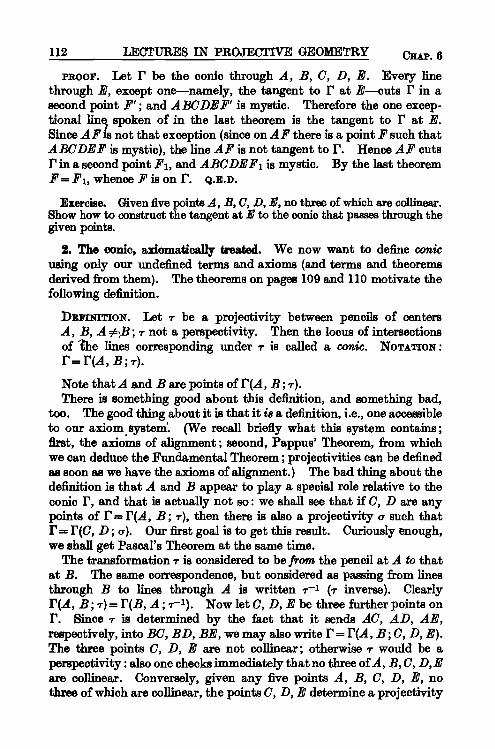
~'"
,.y
o°4
m..
''d
lam
'-d
,.q '-O'L
S
pr--+
a
.a:...
CA
R
boo
'~Am
+'
°+'
°+'
bow
AB
C
112 LECTURES IN PROJECTIVE GEOMETRY CHAT. 6
rxoor. Let r be the conic through A, B, C, D, E. Every linethrough E, except one-namely, the tangent to r at E-outs r in asecond point F'; and ABCDEF' is mystic. Therefore the one excep-tional linq spoken of in the last theorem is the tangent to r at E.Since Al is not that exception (since on Al there is a point F such thatABCDEF is mystic), the line AF is not tangent to r. Hence AF cutsr in a second point Fl, and ABCDEFI is mystic. By the last theoremF=FI, whence F is on r. Q.E.D.
Exercise. Given five points A, B, C, D, E, no three of which are collinear.Show how to construct the tangent at E to the conic that passes through thegiven points.
2. The conic, axiomatically treated. We now want to define conicusing only our undefined terms and axioms (and terms and theoremsderived from them). The theorems on pages 109 and 110 motivate thefollowing definition.
DEFINITION. Let r be a projectivity between pencils of centersA, B, A #;B ; r not a perspectivity. Then the locus of intersectionsof the lines corresponding under r is called a conic. NOTATION :r=r(A, B;r).Note that A and B are points of r(A, B; T).There is something good about this definition, and something bad,
too. The good thing about it is that it i8 a definition, i.e., one accessibleto our axiom system: (We recall briefly what this system contains ;first, the axioms of alignment; second, Pappus' Theorem, from whichwe can deduce the Fundamental Theorem; projectivities can be definedas soon as we have the axioms of alignment.) The bad thing about thedefinition is that A and B appear to play a special role relative to theconic r, and that is actually not so : we shall see that if C, D are anypoints of r = r(A, B ; r), then there is also a projectivity a such thatr = r(c, D ; a). Our first goal is to get this result. Curiously enough,we shall get Pascal's Theorem at the same time.
The transformation r is considered to be from the pencil at A to thatat B. The same correspondence, but considered as passing from linesthrough B to lines through A is written r-1 (r inverse). Clearlyr(A, B; r) = r(B, A ; T 1). Now let C, D, E be three further points onr. Since r is determined by the fact that it sends AC, AD, AE,respectively, into BC, BD, BE, we may also write r = r(A, B ; C, D, E).The three points C, D, E are not collinear; otherwise r would be aperspeotivity : also one checks immediately that no three of A, B, C, D, Eare collinear. Conversely, given any five points A, B, C, D, E, nothree of which are collinear, the points C, D, E determine a projectivity
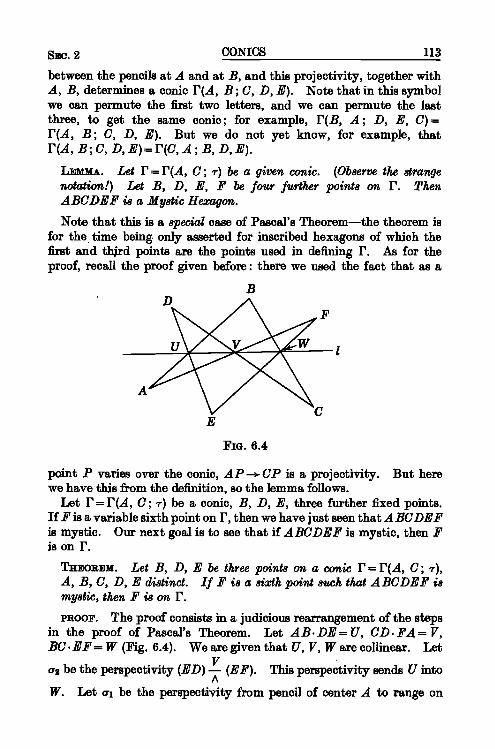
loo
SEe. 2 CONICS 113
between the pencils at A and at B, and this projectivity, together withA, B, determines a conic P(A, B; C, D, E). Note that in this symbolwe can permute the first two letters, and we can permute the lastthree, to get the same conic ; for example, P(B, A ; D, E, C) =P(A, B; C, D, E). But we do not yet know, for example, thatP(A, B ; C, D, E) = P(C, A ; B, D, E).
LEMMA. Let P = P(A, C; T) be a given conic. (Observe the strangenotation!) Let B, D, E, F be four further points on P. ThenABCDEF is a Mystic Hexagon.
Note that this is a special case of Pascal's Theorem-the theorem isfor the time being only asserted for inscribed hexagons of which thefirst and thjrd points are the points used in defining P. As for theproof, recall the proof given before: there we used the fact that as a
B
E
Fm. 6.4
point P varies over the conic, AP -+ CP is a projectivity. But herewe have this from the definition, so the lemma follows.
Let ['= P(A, C; T) be a conic, B, D, E, three further fixed points.If F is a variable sixth point on r, then we have just seen that ABCDEFis mystic. Our next goal is to see that if ABCDEF is mystic, then Fis on P.
THEOREM. Let B, D, E be three points on a conic P= P(A, C; T),A, B, C, D, E distinct. If F is a sixth point such that ABCDEF ismystic, then F is on P.
PROOF. The proof consists in a judicious rearrangement of the stepsin the proof of Pascal's Theorem. Let AB DE = U, CD FA = V,BC EF = W (Fig. 6.4). We are given that U, V, W are collinear. Let
as be the perspectivity (ED)^
(EF). This perspectivity sends U into
W. Let al be the perspectivity from pencil of center A to range on

n".
'"'
ti, bin
alb
"^e{
1
aye
m0°
NH
Sm
ow
°a.Wpb
114 LECTURES IN PROJECTIVE GEOMETRY CHAP 6
line DE ; and let as be the perspectivity from range on line EF topencil at C. Then, by definition,
aIa2a3 : AD - D -. R(= DC EF) CD ;1 a2 as
AB U- W GCB;AE -3 E - E -- CE.
Therefore ala2a3 has the same effect on AD, AB, AE as does T; by theFundamental Theorem, then, ala2a3 =T. Now by definition a1a2a3 :AF --.)-S(= AF DE) -*F --> CF, and therefore T : AF-4-CF; whenceF is on r. Q.E.D.
By the above theorem, we can characterize r(A, C; B, D, E) asfollows : r(A, C ; B, D, E) = set of points F such that ABCDEF ismystic ; plus points A, B, C, D, E. Now the order of points in ahexagon is important ; and, for example, hexagon ABCDEF 0 hexagonBACDEF. But hexagon ABCDEF = hexagon EDCBAF. Hencewe can say : r(A, C; B, D, E) =set of points F such that EDCBAF ismystic ; plus points A, B, C, D, E. But by the last theorem :r(E, C ; D, B, A) = set of points F such that EDCBAF is mystic ; pluspoints A, B, C, D, E.
Hence : r(A, C; B, D, E) = r(E, C; D, B, A). In words : One caninterchange one of the last three letters in the symbol r(A, B; C, D, E) withone of the first two to get a symbol for the same conic. It is true we showonly how to interchange the last of C, D, E with the first of A, B ; butwe know already that the order of C, D, E is immaterial, as is that ofA, B. Moreover, we can interchange both of the first two letters for two ofthe last thrree : we only have to interchange the letters one at a time toget the desired result.
The above result shows that the points A, B used in defining a conicr = r(A, B; T) are in no way special for r : if C, D are any other two pointson r, we can write r = r(A, B ; C, D, E) for some E ; hence,
r = r(C, D; A, B, E) = r(C, D; a)
for some projectivity a (a not a perspectivity).We conclude at the same time that Pascal's Theorem holds quite
generally : the only reason the Lemma did not give us Pascal's Theoremin full generality is that at that stage A and C were special, but nowwe know that they are not really special, since any two points on rmay play the roles of A and C.
THEOREM. Let r = r(A, B ; T) be a conic. Every line through B, withone exception, cuts r in exactly one more point; the exceptional line doesnot cut r again. The exceptional line is T(AB).
why
end
Sxc. 3 CONICS 115
FaooF. Let m be a line through B, l a line through A such thatT(1) = m. Except for B, the intersection l m is the only other point onm and r. Thus m cuts r in exactly two points except in the case thatl passes through B. Q.E.D.
CoEoLLeB.Y. For any point P on a conic r, every line through P, withone exception, cute r in exactly one more point. The exceptional line,by definition called the tangent at P to r, cuts r only in P.
Note that the theorem itself could have been proved easily at thebeginning of our discussion; not so the corollary.
In the proof of Pascal's Theorem, the main fact used was that thelines AB, AD, AE, AF could be sent projectively into CB, CD, CE, CF,respectively. This fact remains true if we let B = C and if we mean byCB the tangent at B to r. Hence we have the following theorem.
ThEon,EM. Let ACDEF be a pentagon inscribed in a conic r ; 1, thetangent at C. Then AC DE, I EF, CD FA are collinear.
In exactly the same way we can get a theorem by letting (B=C and)F=A. Note that the theorems we get this way are just what we mightexpect if we could use a limit argument : i.e., we let B approach C, finallyfalling on C ; the line BC becomes the tangent at C ; and the three pointsof Pascal's Theorem become the three points mentioned in the theorem.[Of course, the argument establishing the theorem (and given above)does not use limits because these have not been introduced axio-matically.] Similarly if F approaches A. Further, we should conjec-ture and prove a theorem corresponding to letting D approach E : weleave the discussion of this as an exercise.
Exercise. Write down a theorem conjectured from Pascal's Theorem byletting B=C, F=A, D=E. Prove the theorem (from the axioms, i.e.,without a limit argument).
T nonEM. Given five points A, B, C, D, E, no three of which arecollinear, there i8 one and only one conic on them.
F$ooF. r(A, B ; C, D, E) is one such conic. Let r = r(U, V; ,r) bea conic through A, B, C, D, E. Then r = r(U, V ; A, B, E) _r(A, B; U, V, E)= r(A, B; C, D, E). Q.E.D.
Exercise. Let A, B, C, D, be 4 points, no three of which are collinear, l aline through none of them. Call a pair of lines a degenerate conic. For anypoint X on l there is one and only one conic through A, B, C, D, X. Thiscuts l in a second point Y (Y = X if l is tangent to the conic). Prove that% -+ Y is a projectivity.
3. The polar. We start with a motivation from elementary geo-metry. Let r be a circle, 0 its center, P a point not on r. Through P
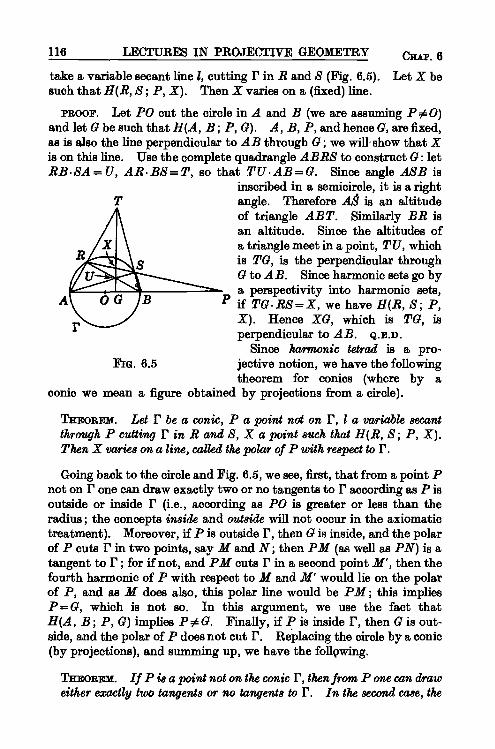
...
ice
.°7
F+
+
ti''z
2
bye
r.,
f-+
Qom
ear+
;,
+'',
C3'
E-4
Fit'L
!
Q0.
116 LECTURES IN PROJECTIVE GEOMETRY CHAP 6
take a variable secant line 1, cutting r in R and S (Fig. 6.5). Let X besuch that H(R, S; P, X). Then X varies on a (fixed) line.
PROOF. Let PO out the circle in A and B (we are assuming P 0 0)and let 0 be such that H(A, B ; P, 0). A, B, P, and hence 0, are fixed,as is also the line perpendicular to AB through G; we will- show that Xis on this line. Use the complete quadrangle ABRS to construct G: letRB SA = U, AR. BS = T, so that TU. AB = 0. Since angle ASB is
FIG. 6.5
inscribed in a semicircle, it is a rightangle. Therefore ASS is an altitudeof triangle ABT. Similarly BR isan altitude. Since the altitudes ofa triangle meet in a point, T U, whichis TO, is the perpendicular throughO to AB. Since harmonic sets go bya perspectivity into harmonic sets,
P if TO RS= X, we have H(R, S ; P,X). Hence X0, which is TO, isperpendicular to AB. Q.E.D.
Since harmonic tetrad is a pro-jective notion, we have the followingtheorem for conics (where by a
conic we mean a figure obtained by projections from a circle).
THEOREM. Let r be a conic, P a point not on r, l a variable secantthrough P cutting r in R and S, X a point such that H(R, S ; P, X).Then X varies on a line, called the polar of P with respect to P.
Going back to the circle and Fig. 6.5, we see, first, that from a point Pnot on r one can draw exactly two or no tangents to r according as P isoutside or inside r (i.e., according as PO is greater or less than theradius ; the concepts inside and outside will not occur in the axiomatictreatment). Moreover, if P is outside r, then 0 is inside, and the polarof P cuts 1' in two points, say M and N ; then PM (as well as PN) is atangent to P ; for if not, and PM cuts r in a second point M', then thefourth harmonic of P with respect to M and M' would lie on the polarof P, and as M does also, this polar line would be PM; this impliesP=0, which is not so. In this argument, we use the fact thatH(A, B ; P, 0) implies P 0 G. Finally, if P is inside r, then 0 is out-side, and the polar of P does not out P. Replacing the circle by a conic(by projections), and summing up, we have the foll9wing.
THEOREM. If P is a point not on the conic P, then from P one can draweither exactly two tangents or no tangents to P. In the second case, the

't2
y{,
'perO
CR
SEC. 4 CONICS 117
polar of P does not cut r ; in the first case, it cuts r in two points Mand N, and PM and PN are the tangents.
4. The polar, axiomatically treated. To define polar, we will makeuse of the relation H(A, B; C, D). Most of the properties of this rela-tion that we shall want follow from our considerations on quadrangularsets, for example, the theorem that, given three distinct collinear pointsA, B, C, there is one and only one point D such that H(A, B; C, D).However, DOC does not follow: to see that it does not, just considerour 7-point geometry. Since we shall want DOC, we introduce anaxiom precisely for this purpose.
Axiom. The diagonal points of a complete quadrangle are not collinear.
The theorem that H(A, B ; C, D) implies C D is immediate. Thistheorem is, in fact, obviously equivalent to the axiom.
(In terms of a coordinate system over a field K, this axiom meansthat 1-F 1 9 0 in K. )
Exercise. The dual of the above axiom is a true theorem.
THEOREM. Let r be a conic (defined from our axiom system), and letP be a point not on r. If from P one can draw one tangent PM tor(M on r), then one can draw a second tangent from P to r.
PROOF. Let R be a point on r, R # M. If PR is not a secant, thenit is a second tangent. So suppose PR cuts r again in S. Let Q besuch that H(R, S ; P, Q). Since MQ O MP, MQ is a secant, cutting rin a second point N. Let -r be the projectivity such that r = r(N, M; r).On RS consider the transformation al : X -> Y, where Y is the pointsuch that H(R, S; X, Y) (and R - R, S --> S). One sees that al is aprojectivity and sends R a R, S - S, P -- Q, and Q -- P. Now userto define a projectivity a2: X -> Y, where Y = RS r(NX ). Then a2sends R --> R, S -> S, and Q -* P. By the Fundamental Theorem,al = U2; hence a2: P -> Q. For r, this means that r : NP -* MN, orI r-1: MN -> NP. Hence, NP is tangent to r at N. Q.E.D.
THEOREM. Let r be a conic, P a point not on r. From P one candraw at most two tangents to r.
PROOF. The proof is a rearrangement of the steps of the last proof.Let PM, PN be two tangents to r, M, N on r (if two do not exist, thenthe theorem follows at once). Let R be a point on r, R # M, R 0 N.We want to prove that PR is a secant. Let Q = PR-. MN, and let S besuch that H(R, S; P, Q). Then using an argument like that occurringin the last proof, one proves that S is on r.

off
Ram
C"+
118 LECTURES IN PROJECTIVE GEOMETRY CHAP. 6
THEOREM. Let r be a conic, P a point not on r, l a variable secantthrough P cutting r in R and S, X a point such that H(R, S ; P, X).Then X varies on a line, called the polar of P with respect to P.
PROOF. Let PAB, with A, B on r, be a fixed secant through P.Let G be such that H(A, B; P, G). Let a, b be the tangents at A, B,respectively. Let a, b meet at H. Consider the "hexagon" AARBBS.Then a b = H, AR BS = U, RB SA = V are collinear ; moreover UVpasses through G. Hence, as secant PRS varies on P, the points U, Vvary on the fixed line HG. Let X = UV RS. Then H(R, S ; P, X),and X varies on HG. Q.E.D.
DEFINITION. If P is on r, the polar of P with respect to r is the tan-gent at P to P.
THEOREM. A point P is on P if and only if it is on the polar of P.
PROOF. This follows immediately from the axiom on the diagonalpoints of a complete quadrangle.
THEOREM. If P is not on the conic r, then the polar of P is nottangent to P.
PROOF. Suppose the polar p of P touches r at Q. Since p is not onP, p 0 PQ. Therefore PQ is a secant, cutting r in a second point R.Let S be such that H(Q, R ; P, S). Then S is on p. This makesp = QS = PQ ; contradiction.
THEOREM. Let r be a conic, P a point not on r. If from P twotangents PM, PN (M, N on P) can be drawn, then MN is the polar of P.
PROOF. In a previous theorem, given the tangent PM, we showedhow to construct the tangent PN. A reconsideration of that construc-tion gives the present theorem.
THEOREM. Let r be a conic, P a point not on P. We know that thepolar p of P either does not cut r, or cuts it in two points, M, N. In thelatter case, PM, PN are tangents.
PROOF. Immediate.
THEOREM. If the polar of P passes through Q, then the polar of Qpasses through P.
PROOF. If P is on the conic r, then its polar is the tangent at P ;QP is tangent at P ; and the polar of Q passes through P. Similarly ifQ is on r. So suppose neither P nor Q is on P. Take a secant PBS,with R, Son P. We assume that Q is not on RS, as in that case the proofis immediate. If QR and QS are tangent to r, then RS is the polar of Q

0.,SEC. 4 CONICS 119
and passes through P. Suppose QR or QS, say QR, is not a tangent;QR cuts 1' again in T. We claim that PT is not a tangent; for if itwere, then TQ would be the polar of P ; but the polar of P does not passthrough R, since it passes, rather, through the point X on RS such thatH(R, S; P, X). Let PT cut P again in U. Let Q1=RT SU. Usingthe quadrangle RST U, we see that the polar of P passes through Q1.Were Q1#Q, this polar would be QQ1; not so. Therefore, Q=Q1.Using the quadrangle RST U again, we see that the polar of Q(=Q1)passes through P. Q.E.D.
THEOREM. Every line l is the polar of some point (with respect to agiven conic P).
rxooF. Let P, Q be two points on 1, p, q their polars, R a point onp and q (actually, p # q, so R =p q). Then the polar of R passesthrough P and through Q, hence PQ = l is the polar of R. Q.E.D.
DEFINr oN. R is called the pole of 1. I.e., R is pole of l if l ispolar of R.
Exercise. Distinct points have distinct polars.
THEOREM. Let I' be a conic, P a point, p its polar. Let X be avariable point on p and consider the transformation r : X -p- polar of X.Then,r is a projectivity (from the range on p to the pencil on P).
PROOF. First assume p is not a tangent, or, stated otherwise, P isnot on p or P. The polar of X passes through P. To construct thispolar, take a fixed point Q on r, Q not on p. Let QX meet r again in Y.(Generally, if Z is such thatH(Q, Y ; X, Z), then PZ is the requiredpolar.)Since P is not on r, Q o P ; let QP p = S ; S 0 Q, S :A P, since neither Pnor Q is on p. Since the polar of P is not on Q, the polar of Q, i.e., thetangent at Q, is not on P ; so QP is a secant ; let it out r again in R.Then H(Q, R ; S, P). Let YR p = W. Then (unless W = S)
H(WQ, WR; WS, WP)
and therefore WP is the polar of X (also if W=S). PW -, BY is aperspectivity. BY -* Q Y is a projectivity ; Q Y -a- X is a perspectivity.Hence, PW - X is a projectivity. This completes the proof for thecase that p is not tangent to P.
Exercise. Give the proof for the case that p is tangent to P.
By the exercise, the proof is complete.
THEOREM. Let r be a conic, a, b, two tangents to r (at A and B).Let X be a point on a. Through X (if X 0 A) there is a second tangent
a°,
.°Sand
...!3r
nom
'LS
q!-+
p'
,.Q4-4
p.,.o"
.,,n,,
120 LECTURES IN PROJECTIVE GEOMETRY CHAP. 6
to r; let this second tangent (if 0 b) cut b in Y. Then X -+ Y i8 aprojectivity, not a perepectivity. (For X = A, we define Y = a b ; andfor we define Y=B.)
PROOF. Let XY touch r in Z. Then AZ is the polar of X and BZis the polarof Y. X-* AZ, Y -+ BZ, and AZ -+ BZ are projectivities.Hence, X-+ AZ -- BZ -- Y is a projectivity. Since a b -- AB-* b-*Boa b, the projectivity is not a perspectivity. This completes theproof.
Let us dualize our considerations. What will be the dual of a conic?A conic is a set of points ; so its dual will be a set of lines. To have aconvenient term, let us call the conics so far considered "point-conies";the dual notion will be that of a "line-conic." As for the definition,let a, b be two lines, T a projectivity from a to b, T not a perspectivity.For any point X on a, consider the line on X and r(X ). This set oflines forms a line-conic.
THEOREM. The set of tangents to a point-conic is a line-conic.
PROOF. This is a reformulation of the last theorem.
What is the dual of "tangent to a point-conic"? If r is a point-conic, a line either cuts r in two points, no points, or exactly one pointif it is a tangent. Let us speak of "no-cut, one-cut, two-cut lines."Let r* be a line-conic. The dual of a "line cutting r- is a "point lyingon a line of r*,,; let us use the term "subtend" as dual of "cut." Wethen can speak of "ho-subtend, one-subtend, two-subtend points."The dual of "tangent," i.e., "one-out line" is "one-subtend point." Aone-subtend point is a point on which there is just one line of r*.
Let I' be a point-conic. Its set of one-cut lines is a line-conic r*.Dually, the set of one-subtend points of r* is a point-conic r**. Itdoes not follow from duality that r** = P ; but this is in fact so, as oneeasily sees.
BRIANCHON's THEOREM. Let r be a point-conic, a, b, c, d, e, f sixtangents thereto. Then the lines ab de, be ef, ed fa are concurrent.
PROOF. This theorem sounds a little like the dual of Pascal's, but itcould not be the dual : Pascal's Theorem is about a point-conic, so thatits dual is about a line-conic, whereas Brianchon's Theorem is not abouta line-conic, but about a point-conic. Still, the lines a, b, c, d, e, f aresix lines of a line-conic, and applying the dual of Pascal's Theorem weget Brianchon's.
If we define conic to mean the set of points of a point-conic plus itsset of tangents, then conic becomes a self-dual concept ; and deleting the
ti`p+
_'Z
7
;T'°
'L3
C7'
ate
(D'
...w
..
t+,
gym
'
Q''
ti,
amp
m;.
+m
' 'cacaw
..r404
+°a
...
#r'f,,
"LS
I-fl;`ti
'"O
+°3
a1'
off+
O,
C.'
4-t
4.4 gym,
.+7
.,.
--+C
".
,c;
...
SEC. 5 CONICS 121
word point from the statement of Brianchon's Theorem we do get atheorem of the same content and one that is the dual of Pascal's.
5. Polarities. Let ir, ir' be two planes ; each consists of a set ofpoints and a set of lines. An isomorphism of it onto ir' is a one-to-onemapping of the set of points of it onto the set of points of ir' and of theset of lines of it onto the set of lines of ir' such that incidence is preserved,i.e., if P is on l in 7r, then the image of P is on the image of l in n'. (Seep. 55.) If ,r=,r', the isomorphism is called an automorphism. Let a bean automorphism, l any line of ir, 1' = a(l). Then a induces a transforma-tion from the range on l to that on 1'. If this is a projectivity for each1, then a is called a projective collineation. A correlation is much like aprojective collineation, the only difference being that it sends pointsinto lines and lines into points. Let a be a correlation. Let P be apoint, a(P) =1, a(l) =Q. In general, we need not have Q = P. Werea2( = a a) the identity transformation, then we would have P=Q. Atransformation whose square is the identity is called an involution. Acorrelation that is an involution is called a polarity.
Let r be a conic. Let a be the transformation of 7r that sends eachpoint into its polar and each line into its pole. By theorems establishedpreviously one sees that a is a polarity.
In a polarity a, if X and Y are points and Y lies on a(X), then X lieson a(Y), as one easily proves. In this situation one calls X and Yconjugate to each other. A point X is self-conjugate if it is conjugate toX, or, what is the same thing, if X is on a(X).
Let r be a conic, a the associated polarity described in the next to thelast paragraph. Then clearly r consists of the self-conjugate elements ofa. Conversely, start with a polarity a (no conic given) : we want, ifpossible, to associate a conic with a. It may be that a has no self-conjugate elements. but if it has at least one, we can show that the setof self-conjugate elements is a conic P ; moreover, for any point X,a(X) will be the polar of X with respect to P. Due to lack of space, wewill not write out a synthetic proof, though we will later give an analy-tical proof (see Chapter X, §5). One consequence of the facts juststated, however, is the following. At the very beginning of our dis-cussion on conics, we could have defined the term polarity, and thencould have defined conic as the set of self-conjugate elements in a polar-ity that has at least one self-conjugate element. The advantage ofsuch a definition is that no point (or line) of the conic appears, from thedefinition, to be special. The disadvantages are obvious.
for
0
`ti
"off
CHAPTER VII
HIGHER-DIMENSIONAL SPACES RESUMED
1. Theory of dependence. Preparatory to the further developmentof higher-dimensional projective spaces, we consider the so-called theoryof dependence. This theory, if given axiomatically, has a greatnumber of applications, the application to projective geometry beingonly one.
We are given a set S. Using the set S we build strings of elementsfrom S : a string is simply a finite sequence <ai, , a,,>, where the atare elements of S. The order of the elements is of importance; forexample, if a1:0 a2, then the string <ai, a2> is different from the string<a2, a,>. Thus string and set (or subset) do not mean the same thing :the set {ai, a2} is the same as the set {a2, al} ; two sets are called equalif they contain the same items. Note also that the string <a,, ai> isdifferent from the string <ai, al, ai>, but that the sets {a,, a,} and{ai, al, al} are the same.
Given an element a of S and a string <ai, , an>, we will sometimessay that a depends on <ai, , a.>. The term depends on shall be unde-fined : it is a primitive term. The axioms concern this term.
The axioms are as follows :
I. THE IDENTITY Axiom. Given a string <a,, . , a >, eachat(i =1, , n) depends on <ai, . , a.>.
II. ThE EXCHANGE Axiom. If a depends on <ai, , an> but not on<ai, , an_i>, then an depends on <ai, , a._i, a>.
III. THE TRANSITIVITY Axiom. If c depends on <bi, , b.> andeach bt(i =1, , n) depends on <ai, , am>, then c depends on<ai,..., a.>.
THEOREM 1. Let <ai, , a.>, <bi, , be two strings and assumethat {ai, , am}={bi, , Then c depends on <ai, , am> ifand only if c depends on <b i, ,
In other words, whether c depends on <ai, , am> depends solely onthe set {ai, , am} and not on the order in which the at occur in the
122
''g
Am
y
mm
'20
'C
ps
0(D
...
SEc. 1 HIGHER-DIMENSIONAL SPACES RESUMED 123
string <ai,. - , am>. Because of this, we sometimes speak of c beingdependent on the set {al,. , am}, as this can usually be done withoutconfusion.
PROOF OF THEOREM 1. Assume c is dependent on <ai, , am>.Each at is dependent on <b i, , b.> by Axiom I. Hence by transiti-vity, c is dependent on <b i, . , b.>. Similarly, if c is dependent on<bi, , b,>, then it is dependent on <ai, - , am>.
DEFINITION. A string <ai, , am> is said to be dependent if, forsome i, at is dependent on <ai, . , at_i, at+i, , am> (or morebriefly : if one of the at is dependent on the others). A string is calledindependent if it is not dependent.
One also sometimes speaks of a set being independent, but here thereare good chances for confusion. For example, suppose the string<ai, . , am> is independent : then one would also say that the set{ai, , a,} is independent. Now <ai, a,,, a2, , am> is dependent(any string with replicas is dependent, by Axiom I). Presumably thenone would say that {ai, ai, a2, -, am} is dependent. But the set{ai, a2, , am} is the same as the set {ai, ai, a2, , am}. Still, with alittle caution, one can avoid such ambiguities. (The best way to avoidsuch ambiguities is to use the word string when one means string.)
The empty string, i.e., the string with no elements, is independent, asone sees from the definition. A string <a> with one element a is de-pendent if and only if a is dependent on the empty string. We neednot, in fact should not, puzzle our heads as to what could be meant byan element depending on the empty string, since quite generally what ismeant by an element being dependent on a string is undefined.
THEOREM 2. If <ai, , is independent, but <ai, , a.> is notindependent, then a is dependent on <ai, , an_i>.
PROOF. Some at are dependent on the others : if one of these is an,then the proof is complete. So suppose that one of ai, , an_i isdependent on the other at. By Theorem 1, since order is immaterial, wemay suppose this to be ai : notationally, then, ai is dependent on<a2i , an_i, an>. Now ai is not dependent on <a2, - , an_i>.Hence, by the exchange axiom an is dependent on <a2, , an_i, ai>.By Theorem 1, then, an is dependent on <ai, , an_i>. Q.E.D.
THEOREM 3. Given a set {ai, . ., am}, there is a string built from the atwhich is independent and on which each at is dependent.
PROOF. Using the at, one can build at least one independent string :for example, the empty string. Consider all such independent strings :
124 LECTURES IN PROJECTIVE GEOMETRY CHAP. 7
an independent string cannot contain replicas, so every such string hasat most m elements ; take one such string that is longest. Notationally,say this is <al, -, a,>. Then each at is dependent on <al,- - , a,>.For <al, , as, at> is dependent ; hence by Theorem 2, at is dependenton <a,, ... , a,>. Q.E.D.
DEFINITION. Two strings <al, , <b 1, , b n> are calledequivalent if each at depends on <b1, - , bn), and each bt depends on<al,...,Note that any string is equivalent to itself and that strings equivalent
to the same string are equivalent to each other.
THEOREM 4. (THE EXCHANGE THEOREM). Let <al, - -, a,> be anindependent string, <bl, - - . , b,> a string (not necessarily independent),with each at dependent on <bl, - , b,>. Then there exists a string<c1, , c,> equivalent to <bl, - , b,> and such that each at occurs inthe string <c1, -, c,).
PRooF. Suppose we have a string <c1, , c,> equivalent to<b 1, , b,> and containing t of the at. (Note that the at are distinct.)If t = r, the proof is complete, so suppose t < r. We now show how toget a string equivalent to <c 1, , c,> and containing one more at.Repeating the argument r - t times, the proof will be complete.
The string <c1, ... , c,> contains t of the at ; since the order Qf the atis immaterial, we may suppose these are al, , at ; and since the orderof the c1 is immaterial, we may suppose cl = a,i c2 = a2, , ct = at.Thus at+, is not dependent on <cl, - -, ct>, but it is dependent on<°j,.. , Ct, , Consider the strings <cl, , <cl, .., et+1X01, , ct+2>, , <cl, , e,) ; and take the shortest one on which at+1depends : say this is <cl,we know that n a 1. Thenat+l does not depend on <cl, , ct+n-1), so by the exchange axiom,ct+n depends on <cl, , ct+n-1, at+i>. Now consider the strings<c1, - .. , et+n-1, at+1, ct+n+1, - , c,> and <cl, , et+n-1, et+n, et+n+l,
, c,). Then one sees that these two strings are equivalent ; andthe first contains t + 1 of the at. The proof is complete.
CoRoraARY. With the assumption of the theorem, s >_ r.
THEOREM 5. If <al, . , a,> and <bl, . , b,> are independent andequivalent, then r = s.
PROOF. By the corollary, r 2- s and 8 r, so r = s.The strings that we consider will always be finite (by definition),
but the set S may be infinite, and we will also consider various, possiblyinfinite, subsets of S. Let M be a subset of S. By a basis of M wemean an independent string on which each element of M depends.
^--
----
map
p""
42c'
U'"
sa'c=i`vim
SEC. 1 HIGHER-DIMENSIONAL SPACES RESUMED 125
A set M may not have a basis ; but if it does, then by Theorem 5, anytwo bases of M have the same length. This common length is calledthe rank of M.
THEOREM 6. If M has a basis, then any independent string<a,, ... , am>
with the a{ in M can be completed to a basis of M; i.e., there is a basis ofthe form <ai, , am, a.+,,,, *>, with the a= in M.
rRoor. Let r= rank (M). Then by Theorem 4, Corollary, no inde-pendent string of elements from M can be of length greater than r.Consider all independent strings of the form <ai, , am, am+i, , an>,with the ai in M. Then n:5 r. So among these strings there is a longest.By the argument of the proof of Theorem 3, such longest string will bea basis.
COROLLARY. If rank (M) = r, then any independent string of elementsfrom M is of length at most r.
COROLLARY. If N is a subset of M and M has a basis, then N has abasis, and rank N :!g rank M.
Exercises
1. Show that a model of the axiom system we are considering can beobtained as follows : Let S be an arbitrary set, and let "a depends on < ai, ,am > " be taken to mean "a is one of the a{".
2. Show that a model can be obtained as follows. Let F be a commutativefield. Consider all ordered n-tuples of elements from F, where n is a fixed(positive) integer : this shall be the set S. Let "a depends on <a,,. , am > "be taken to mean that the n-tuple a is a linear combination of the n-tuplesai, , am, if m > 0; for m = 0, "a depends on the empty string" shall meanthat a consists of n zeros. (See remark below.)
3. Same as the last exercise except that F is to be a not necessarily com-mutative field, and the linear combinations are restricted to be right linearcombinations.
4. Write out the proof of the last corollary.5. In Exercise 2 above, take n = 3 and answer the following questions.
2 5 2 5Are (33 ), (6) dependent? Or, more exactly, is <(3 ), (6 )> dependent? Is
9 5)>
dependent? Is <(3 /), 16), (88 )> dependent?5
7
<`4). (67 15 4) (12
REMARx ON THE SECOND EXERCISE. In building a model we must say what"a depends on < ai, , am > " shall mean, whatever the string < ai, , am >be, in particular if it is the empty string. Suppose we have suggested toourselves that "a depends on < ai, , am >, m > 0" shall mean a is a linearcombination of ai, , am. Still, what could "a dependent on the empty
cep
cue
Imo, a-
-
Win
°r, w
pb
D,0
o?;
126 LECTURES IN PROJECTIVE GEOMETRY CHAP 7
string" mean? It makes no sense to take a linear combination of nothing.Here we argue to ourselves as follows. Let b be any n-tuple. If a is todepend on the empty string (and we are to come out with a model), then, forevery b, a depends on < b >, since by Axioms I and III, if a depends on astring < al, , am >, it depends on any longer string < a1, , am, >.Hence if a depends on the empty string, then a is a multiple of every n-tupleb. The only n-tuple with this property is the n-tuple consisting of n zeros :call this z. We thus have two possibilities: (1) either say z depends on theempty string, or (2) say no n-tuple depends on the empty string. Actually(2) is also excluded ; because let b be any n-tuple, b 0 z, and suppose we havesaid (2). Then < z > is independent, but < z, b > is dependent : this makesb a multiple of z, hence equal to z, which is not so. Hence we are left with(1) as the only possibility. By the exercise, (1) does work.
2. Application of the dependency theory to geometry. We takepoint, line, and on as primitive terms and take as axioms the ones givenon p. 96, in particular Axiom 3, which is Pasch's Axiom. Wewant to build a model of the dependency theory using geometricnotions. The set S shall be simply the set of points. The first thingis to define depends on, i.e., given a point P and a string of points<P1i , Pn>, we must say what it shall mean to say that P depends on<P1i , P,>. To facilitate this, we give a preparatory definition.
DEFINITION. We say Q depends directly on <P,,. , Pm> if Q is oneof the Pi or if Q is collinear with some pair Pj, P1i P{ # P,.
DEFINITION. We say Q depends on <P1, , P.> if there are pointsQ1, Qs, , Q8 such that Qj depends directly on
<P1, ... , Pn, Q1, ... , Qi-i>
for i =1, , s and Q = Q,,. No point is to depend on the empty string.
Now to check the axioms. Axioms I and III are immediately veri-fied. Axiom II gives some difficulty. The following lemma will beuseful. (This lemma is rephrased in Theorem 5, p. 130).
LEi&i &. If Q is dependent on <P1i , P,>, and Q 96 Pn, then thereis a point Z on the line QPn that is dependent on < P 1 ,--- , Pn_i>.
PROOF. Let Ql, , Q8 be such that Qf is directly dependent on<P1, , Pn, Q1, , Qa_1> f o r i =1, , s and Q =Q 8. There may bemany choices for Q1, , Q8 but we suppose them taken in such waythat s is as small as possible. Then we make an induction on s. Con-sider first the case s = 1. Then Q depends directly on <P1, , Pn),hence is either one of the Pt or is collinear with a distinct pair P{, P j.In the first case, Q = Pt, we have i 0 n, since Q 0 Pn, whence Q is depen-dent on <P1, , Pn-,> and we take Q = Z. In the second case, with Qcollinear with P j, P1, if i 0 n, j n, then Q is dependent <P1, , P,_I>and we take Z = Q ; if j = n, then we take Z = Pj.
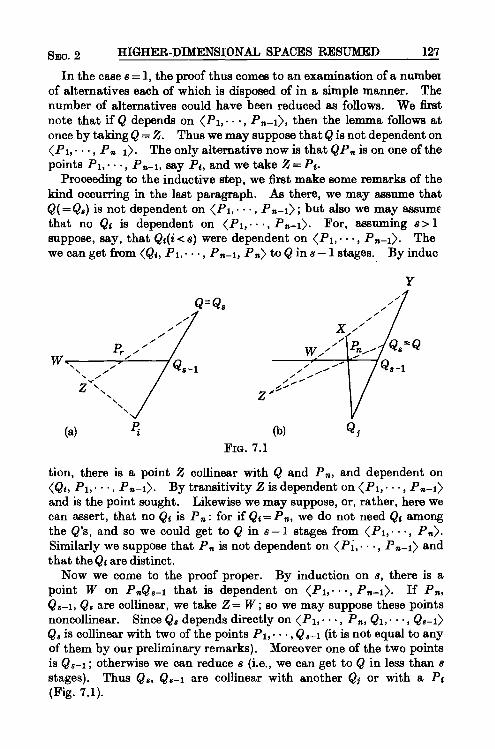
bop C
ps
4-+
gays
Pal
SEC. 2 HIGHER-DIMENSIONAL SPACES RESUMED 127
In the case s =1, the proof thus comes to an examination of a numberof alternatives each of which is disposed of in a simple manner. Thenumber of alternatives could have been reduced as follows. We firstnote that if Q depends on <P1, , Pn_j>, then the lemma follows atonce by taking Q = Z. Thus we may suppose that Q is not dependent on<Pl, , Pn_i>. The only alternative now is that QPn is on one of thepoints P1, , Pn_1, say Pj, and we take Z = P1.
Proceeding to the inductive step, we first make some remarks of thekind occurring in the last paragraph. As there, we may assume thatQ(=Q8) is not dependent on <P1i , Pn-i>; but also we may assumethat no Q{ is dependent on <P', , Pn-1>. For, assuming 8 >Isuppose, say, that Q{(i < s) were dependent on <P,,. , P.-,>. Thewe can get from <Q{, P1,- , P,,-,, Pn> to Q in s -1 stages. By induc
Y
Q=`cs
(a)r
(b)
FIG. 7.1
tion, there is a point Z collinear with Q and Pn, and dependent on<Qi, P1, , Ps_'>. By transitivity Z is dependent on <P,,. , Pn_1>and is the point sought. Likewise we may suppose, or, rather, here wecan assert, that no Qt is P.: for if Q1=P, we do not need Qj amongthe Q's, and so we could get to Q in s - 1 stages from <P', , Pn>.Similarly we suppose that R. is not dependent on <P1, , P.-,> andthat the Qg are distinct.
Now we come to the proof proper. By induction on s, there is apoint W on PnQs_1 that is dependent on <P1, , Pn-1>. If Pn,Q8-1, Q8 are collinear, we take Z= W ; so we may suppose these pointsnoncollinear. Since Q8 depends directly on ( F 1 , . . . , Pn, Ql, , Q8-1>Q8 is collinear with two of the points P1, , Qa_1 (it is not equal to anyof them by our preliminary remarks). Moreover one of the two pointsis Q8_l; otherwise we can reduce s (i.e., we can get to Q in less than sstages). Thus Q8, Q8_1 are collinear with another Qp or with a P1(Fig. 7.1).
bow
,40
pp,
gym
.
ti;co
o
Qua
Obi
>'o
0.r°"°
0.'
o0.'cm
.
`"''!3a
f.'v+
.
,,y,.q
ELI
'Em
.'
128 LECTURES IN PROJECTIVE GEOMETRY CH". 7
Consider the two cases separately. The second one mentioned(Fig. 7.1a) is easier and will be considered first. The points W, Q,_i, P;determine a triangle (i.e., these points are distinct and noncollinear-this follows from the preliminary remarks). We also have Q#Q,_1and P. 9& Q,_l, so by Pasch's Axiom, QPn and WP; meet in a point Z.The point Z b dependent on < W, P1i , P.-,>, hence, by transitivity,also on <Pj, , Pn_'>. Therefore Z is the point sought.
In the second case (Fig. 7.1b), we first note that there is a point Xon Q1Pn that is dependent on «l, , this follows because ofthe induction assumption on s. From the preliminary remarks,W # P., X 96 Pn ; applying Pasch's Axiom to triangle Pn.Q5Q,_l, we geta point Y collinear with W and % and on QjQ,_l. Since W # X, Ydepends on <W, I>, and since W, % each depend on <Pj, , Pn_1),by transitivity Y depends on <Pj, , P.-,>. Now applying Pasch'sAxiom to triangle Y WQ,_1-note that Y, W, Q8-1 are not collinear-we get a point Z on P.Q. that is collinear with W and Y. Again usingtransitivity, we conclude that Z is dependent on <Pj, , P.-,>. Theproof of the lemma is complete.
To check Axiom II of the dependency theory, let P depend on<Pj, , Pn_l, P, > but not on <Pj, , Pn_1) : to see that P. dependson <Pl, , P,_l, P>. If P=P., this is immediate ; so supposeP # P. By the lemma, there is a point Z on PPn that is dependenton <P1, , Pn_i>. Then there are points Q1, . , Q. such that Qidepends directly on <Pj, , P.-I, Q,, , Qs-1>, for each i, and Q, = Z.Moreover P. depends directly on <P, P1, , P.-I, Q1, , Q8>.Hence P. depends on <P, P1, , Pn_1). Axiom II is thus verifiedand the theory of dependency established in the geometric situation.
DEFnNrrioN. A subset M of S shall be called a space if M has a(finite) basis and if it contains togethgr with any P1, , P. in M anyP in S that depends on <P1, , Pn>. (Note that this definitioncould be given in the abstract theory, but we shall be concerned Dulywith the geometric model.)
Th oREM 1. A subset M of S is a space if and only if it has a basis andcontains with any two of its points A, B, A # B, all the points % col-linear with A, B.
The proof is immediate.
THEOREM 2. The intersection of two spaces is also a space.
rxooF. Let N be the intersection of spaces Ml, M2. Since Mi hasfinite rank, also N has finite rank (see p. 125, Theorem 6, second corol-lary). Thus N has one of the two required properties. Let A, B be
¢,O
CD
'pi
pgy
p'
DT
I
r-,
SEC. 2 HIGHER-DIMENSIONAL SPACES RESUMED 129
points in N, A # B, and let % be collinear with A, B. Since A, B arein M1i also % is in M1; since A, B are in Ms, also % is in Ms ; so % is inthe intersection N. Q.E.D.
ConozranY. The intersection of any number of spaces, finitely orinfinitely many, is also a apace.
Notation. N=M1nMs=intersection of M1 and Ms.
If { P 1 , . . . , is any finite set of points, the set of points dependenton <P,,. - , P > is a space, which we designate by [P,, - ., P ]. Here<P1i - - , P, > need not be independent. Any space M is of the form[P,, , with <P1, , even independent : in fact, let<P1, - - - , be a basis of M, then M = [P1, - , P.], as one readilychecks.
Any two spaces are contained together in a space. In fact, ifM = [P,, - , Pm], N = [Q,, . . , Q ], then M and N are both in[P,,- Pm,Q1,---,Qn]
DBFn rrION. The intersection of all spaces containing the spaces Mand N is called the join of M and N.
If M = [P,, , P,,,] and N = [Q1, - , Q.], then any space containingM and N must contain the points P1, -, P,,, Q1, - - , Q,,, hence alsocontain [PL" ', Pm, Ql, , Q»] Thus [P,,., Pm, Q1,- ., Q%] isthe join of M and N. This join is also denoted [M,N].
With a definition like the one above, one can easily define the join ofa finite number of spaces, and the join will be a space. Given infinitelymany spaces, there may not be a space containing all of them, so wewill not define the join in this ease.
If M = [Pi, - - -, P,x], we say that P 1, , Pm generate M, that M isgenerated by P1, , Pm, or spans P1, , Pm. Thus if P1, , Pmgenerate M and Q1, , Q. generate N, then P2,- , Q. generate thejoin of M and N.
Any point P generates a space, namely, the space [P] : this spaceconsists of just the one point P. If P, Q are distinct points, then thespace they generate, [P, Q], consists of the points on the line PQ. Anyline spans any pair of its points ; any line is the join of any two of itspoints.
DEFINITION. The dimension of a space is one less than its rank,i.e., one less than the number of elements in a basis.
Thus a point is a 0-dimensional space, a line is a 1-dimensional space.The empty set is a space; its dimension is -1.
THEoBzm 3. Let M be a space of dimension 2. Then any two lines in
(O+
`.3.
poi
CA
D
0`a ...
fop
bay
a'd'
d
Ll.
CPL
°P4
130 LECTURES IN PROJECTIVE GEOMETRY C$ep 7
M meet. (We say that a line l is in M if every point on l is in M; notethat if A, B are points of M, A 0 B, then the line AB is in M.)
PROOF. Let 1, m be two given distinct lines. Let P be a point on mthat is not on 1. Let P1, P2 be two distinct points on 1. <Pl> is inde-pendent, and since P2 does not depend on P1, the string <P1, P2> isindependent (Theorem 2, p. 123) ; since P is not dependent on <P1, P2>,<P11 P2, P> is independent. The string <P1, P2, P> can be completedto a basis of M (Theorem 6, p. 125) ; but no independent string in M canbe longer than 3 (Theorem 6, Cor.), so <P1, P2i P> is itself a basis. Nowlet Q be any point of m other than P. Then Q is dependent on<P1i P2, P>. Hence by the lemma on p. 126, QP has on it a point Zthat is dependent on <P1i P2>, i.e., is on P,P2. Thus P1P2 and QPmeet in Z. Q.E.D.
THEOREM 4. Let M be a space of dimension > 3. Then some pair oflines in M do not meet.
PROOF. Let <A, B, C, D> be independent. , Then AB and CD do notmeet. In fact, suppose they meet in X. Then D depends on C and X ;and C and X each depend on <A, B, C>. Thus D depends on <A, B, C>,a contradiction.
We have a definition of plane, but using present notions, let us defineplane as a 2-dimensional space. We should see, however, that the twodefinitions describe the same objects. Let ir, then, be a plane accordingto the old definition. We have to see that IT is 2-dimensional. Let,then, A, B, C be three noncollinear points : they are independent, andwe have to see that any fourth point D depends on them. Let CDmeet AB in X. We have : X depends on <A, B>; D depends on<C, X); whence D depends on <A, B, C>. Q.E.D.
Conversely, let it be a 2-dimensional space. We have to see that anytwo lines of ir meet. This was just proved as Theorem 3.
Exercise. In a 3-space, every line meets every plane.
The lemma on p. 126 has the following important formulation.
THEOREM 5. I f Q is in the space ( P I ,--- , and Q OP., then theline QP meets the s p a c e [ P I ,--- ,
Exercises
1. In a 4-space, every line meets every 3-space.
2. In a 4-space, every pair of planes meet.3. In a 5-space, there are planes that do not meet.4. Let orl, 1r2 be distinct planes in a 4-space. [171, ire] is either 3-dimensional
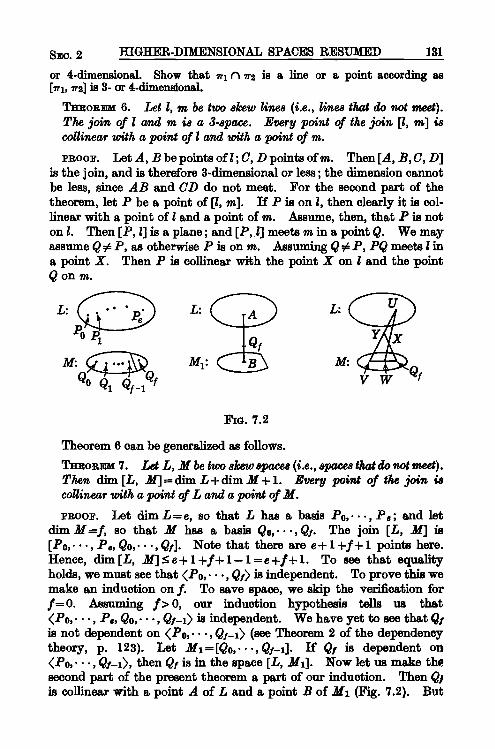
!CD
coo
SEC. 2 HIGHER-DIMENSIONAL SPACES RESUMED 131
or 4-dimensional. Show that irl r) a2 is a line or a point according as[irl, 7r2] is 3- or 4-dimensional.
THEOREM 6. Let 1, m be two skew lines (i.e., lines that do not meet).The join of l and m is a 3-space. Every point of the join [1, m] iscollinear with a point of l and with a point of m.
PROOF. Let A, B be points of 1; C, D points of m. Then [A, B, C, D]is the join, and is therefore 3-dimensional or less; the dimension cannotbe less, since AB and CD do not meet. For the second part of thetheorem, let P be a point of [1, m]. If P is on 1, then clearly it is col-linear with a point of l and a point of m. Assume, then, that P is noton 1. Then [P, 1] is a plane ; and [P, l] meets in in a point Q. We mayassume Q # P, as otherwise P is on m. Assuming Q 9& P, PQ meets l ina point X. Then P is collinear with the point X on l and the pointQ on m.
Fmc. 7.2
Theorem 6 can be generalized as follows.
THEOREM 7. Let L, M be two skew spaces (i.e., spaces that do not meet).Then dim [L, M] = dim L + dim M + 1. Every point of the join iscollinear with a point of L and a point of M.
PROOF. Let dim L = e, so that L has a basis Po, , P, ; and letdim M= f, so that M has a basis Qo, , Qf. The join [L, M] is[Po, , P., Qo, , Qf]. Note that there are e + 1 +f + 1 points here.Hence, dim [L, M] <_ e + 1 +f + 1-1= e +f + 1. To we that equalityholds, we must see that <Po, , Qf) is independent. To prove this wemake an induction on f. To save space, we skip the verification forf= 0. Assuming f > 0, our induction hypothesis tells us that<Po, , Pa, Qo, - - , Qt-i> is independent. We have yet to see that Q fis not dependent on <Po, , Qf-1) (see Theorem 2 of the dependencytheory, p. 123). Let M1=[Qo, ,Qf_1]. If Qf is dependent on<Po, , Qf-1), then Qf is in the space [L, Ml]. Now let us make thesecond part of the present theorem a part of our induction. Then Qfis collinear with a point A of L and a point B of M1 (Fig. 7.2). But
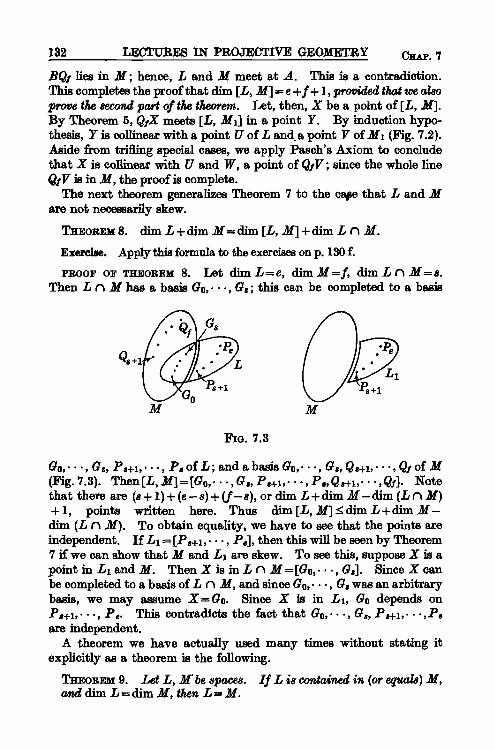
fn'
t+,
ale
a8'
132 LECTURES IN PROJECTIVE GEOMETRY Casi'. 7
BQf lies in M; hence, L and M meet at A. This is a contradiction.This completes the proof that dim [L, M] = e +f + 1, provided that we alsoprove the second part of the theorem. Let, then, X be a point of [L, M].By Theorem 5, QfX meets [L, M1] in a point Y. By induction hypo-thesis, Y is collinear with a point U of L and.a point V of Mi (Fig. 7.2).Aside from trifling special cases, we apply Pasch's Axiom to concludethat X is collinear with U and W, a point of QfV ; since the whole lineQfV is in M, the proof is complete.
The next theorem generalizes Theorem 7 to the cape that L and Mare not necessarily skew.
TsEORFw 8. dim L + dim M = dim [L, M] + dim L n M.
Exercise. Apply this formula to the exercises on p. 130 f.
PROOF of THEOREM 8. Let dim L = e, dim M =f, dim L n M = 8.Then L (1 M has a basis Go, , G,; this can be completed to a basis
FIG. 7.3
Go,* , G8, Pa+19 , P. of L ; and a basis Go, ... , G8, Q 8+1P .. , Qf of M(Fig. 7.3). Then [L, M] = [Go, ... , G a, P1+i, ... , Ps, Q s+i, ... , Qf]. Notethat there are (8 +1)+(e-8)+(f-8), or dim L+dimM-dim(LC M)+ 1, points written here. Thus dim [L, M]:5 dim L + dim M -dim (L n M). To obtain equality, we have to see that the points areindependent. If Li = [Pa+1, , P,], then this will be seen by Theorem7 if we can show that M and L1 are skew. To see this, suppose X is apoint in L1 and M. Then X is in L n M = [Go, , G,]. Since X canbe completed to a basis of L r M, and since Go, , G, was an arbitrarybasis, we may assume X =Go. Since X is in L1, Go depends onPs+1, , P E. This contradicts the fact that G0,. , G a, P 8+1, , P,are independent.
A theorem we have actually used many times without stating itexplicitly as a theorem is the following.
THEOREM 9. Let L, Mbe Spaces. If L is contained in (or equals) M,and dim L = dim M, then L = M.
yea L1+
`ti0.'
C."
0.,
L.'
C."
C.'
°++
P410.'
SEC. 3 HIGHER-DIMENSIONAL SPACES RESUMED 133
PROOF. Let L = [Po, , P.], where e =dim L = dim M. The string<Po, , Pe> is rank M long, so every point in M depends on<Po,... , Pe>, whence M = [Po, ... , P,]=L. Q.F.D.
3. Hyperplanes. Let S bean n-dimensional space. For the next fewtheorems we shall be working in S.
By a hyperplane, we mean an (n-1)-dimensional subspace of S. Aplane, as has already been said, is a 2-dimensional space. In 3-space,the two concepts fall together, but not in n-space if n > 3 (or even ifn # 3).
THEOREM 10. Let A be an r-dimensional space in S, H a hyperplane.Then either H contains A or H intersects A in an (r-1)-dimensionalspace.
PROOF. Assume that H does not contain A. Then the join [A, H]contains H, and since it does not equal H, it must be of dimension> dim H = n - 1. Therefore, dim [A, H] = n (it cannot be > n, sincewe are in n-space). Hence, dim A n H = dim A + dim H - dim [A, H]=r+n-1-n=r-1. Q.E.D.
Conversely, we have the following.
THEOREM 11. Let A be an r-space, Ban (r- 1)-space in A. Thenthere is a hyperplane H such that B = A n H.
PROOF. Let P 0 ,--- , Pr_1 be a basis for B. Complete this to a basisP 0 , . . . , Pr-1, Pr for A, and to a basis Po, P1. , Pr, Pr+1, , P. forS. The space [ P O ,--- , Pr-1, Pr+1, , P,,] is a hyperplane H. It doesnot contain A, since Pr is not dependent on Po, , Pr-1, Pr+1, , P,,.Hence, H n A is an (r-1)-space. H n A also contains B, sinceH n A contains P 0 ,--- , Pr_1. By Theorem 9, H n A = B.
THEOREM 12. Every r-space is the intersection of n - r, but no fewer,hyperplanes.
PROOF. Let A be a given r-space, Po, , Pr a basis for A. Let thisbasis be completed to a basis P 0 , --- , Pr, Pr+l, , P. for S. Considerthe spaces A = Ao = [Po, ... , Pr], A1= [Po, ... , Pr, Pr+1], A2 =[Po, , Pr+l, Pr+2], , [Po, , The last of these is ahyperplane, and every other one can be obtained from the next one byintersecting with a hyperplane. In this way we get A as the intersectionof n - r hyperplanes. Moreover, A cannot be the intersection of fewerthan n - r hyperplanes. For, suppose A = Hl n H2 n ... n H,iwhere H1, H2, are hyperplanes. Consider the spaces H1, H1 n H2,H1 n H2 n H a ,--- . Each of these spaces (after the first) has dimen-sion at most one less than the preceding one (if H1 n ... n Ht=H1 0 ... n Ht+1, however, one does not need Ht+1 in the representation
;F'
Boa
ram 'f,
?'+
ti'(C
Dx'
't/2
°+.
e°+
any
Ks'
ram
`cam
cop
ti'
ors
CI.
yCD
VII
rpm
off.
'Q'
:a0
moo
tap
mad
.>~
...tap
w-4
tapR
ap
IIIy0,40
Q',
......
134 LECTURES IN PROJECTIVE GEOMETRY Cser. 7
A = Hl n . n H8). Hence, Hl n ... n Hg Z n - t, and for t = s, weget r__:n-s. Hence, s>-n-r. Q.E.D.
Exercise, What familiar fact does the preceding theorem give for n=3,r=1?
4. The dual space. Starting from the n-space 8, we will show how toconstruct from it another projective space S'. This other space is a setof objects satisfying certain properties, and these objects we wouldordinarily call "points." But if the word "point" is already reservedfor denoting the objects of 8, we need another word to denote the objectsof S'. To get around this difficulty, we will refer to the objects of S' asPoints (with a capital P).
Now to state what these objects, these Points, are. They are thehyperplanes of S. A Point of S' is a hyperplane of S.
To have a projective space, we need not only points, but also lines.Again, to avoid confusion, we will write Line (with a capital L) whenreferring to "lines" of S'.
Let A, B, C be three Points, i.e., hyperplanes of S. We will say theyare on a Line if the hyperplanes A, B, C are on an (n- 2)-space.
Exercise. What is being said for n=3? What for n=4? What forn=2?
Thus, a Line will consist of all the Points, i.e., hyperplanes, on agiven (n - 2)-dimensional space in S. If is a given (n-2)-spacein S, then it is convenient to refer to the Line S._2i although strictlyspeaking that is not correct, because Sn_2 is a set of points, whereas aLine is a set of hyperplanes. What we really mean when we speak ofthe Line is the set of hyperplanes through
The problem now is to show that for Points and Lines thus defined,S' becomes a projective space.
Let us check Axiom 2, that on any two distinct Points there is atmost one Line. Let us make clear to ourselves what property of hyper-planes is comprised in this statement. Let A, B be Points, i.e., hyper-planes. The space A n B is an (n - 2)-space, and so A and B are on theLine which consists of all hyperplanes on this (n - 2)-space: this is thecontent of Axiom 1, however, not of Axiom 2. Axiom 2 comes to say-ing that there is at most one (n - 2)-space on which both A and B are.If is an (n - 2)-space and Sn_2 is contained in A and in B, then it iscontained in A n B, and since A n B is itself an (n - 2)-space, we have
=A n B. In other words, the set of hyperplanes on A n B is theLine in question.
Let us check Pasch's Axiom. In Fig. 7.4, let A, B represent hyper-planes of S, or, in other words, Points of S'. The part connecting A
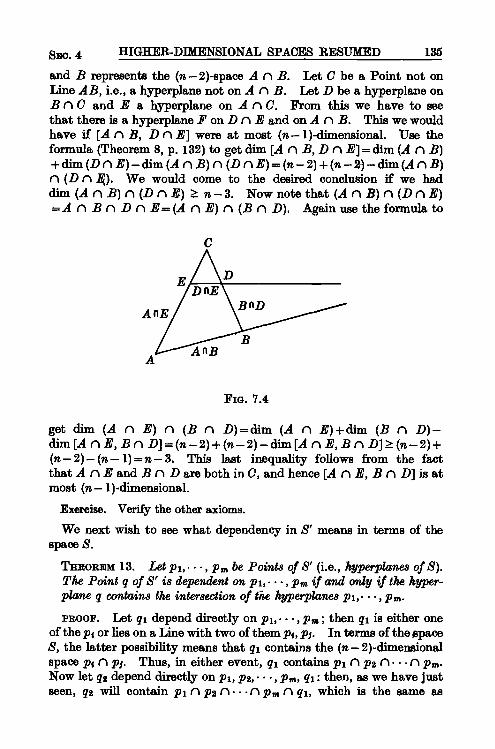
0
coo
'a'
'-'
a+~
Coq
s,"
Sse. 4 HIGHER-DIMENSIONAL SPACES RESUMED 135
and B represents the (n - 2)-space A n B. Let C be a Point not onLine AB, i.e., a hyperplane not on A n B. Let D be a hyperplane onB n C and E a hyperplane on A n C. From this we have to seethat there is a hyperplane F on D n E and on A n B. This we wouldhave if [A n B, D n E] were at most (n-1)-dimensional. Use theformula (Theorem 8, p. 132) to get dim [A n B, D n E] = dim (A n B)+dim(DnE)-dim(Ac B)n(DnE)=(n-2)+(n-2)-dim(AnB)n (D n E). We would come to the desired conclusion if we haddim (A n B) n (D n E) >- n - 3. Now note that (A n B) n (D n E)=A n B n D n E=(A n E) n (B n D). Again use the formula to
FIG. 7.4
get dim (A n E) n (B n D)=dim (A n E)+dim (B n D)-dim [A n E, B n D] = (n - 2) + (n - 2) -dim [A n E, B n D] 2: (n-2)+(n - 2) - (n - 1) = n - 3. This last inequality follows from the factthat A n E and B n D are both in 0, and hence [A n E, B n D] is atmost (n -1)-dimensional.
Exercise. Verify the other axioms.
We next wish to see what dependency in S' means in terms of thespace S.
THEOREM 13. Let pl, , pm be Points of S' (i.e., hyperplanes of 8).The Point q of S' is dependent on p1, , pm if and only if the hyper-plane q contains the intersection of the hyperplanes pi, -, p..rRooF. Let qi depend directly on pi,- , pm; then q1 is either one
of the pi or lies on a Line with two of them pi, pp. In terms of the spaceS, the latter possibility means that qi contains the (n - 2)-dimensionalspace pin pl. Thus, in either event, qi contains pin P2 n n P.-Now let q2 depend directly on pi, P2, -, pm, q1: then, as we have justseen, q2 will contain P1 n P2 n . . n pm n qi, which is the same as
oft
'-'...
... o-'
°+,
arm
~'D
$"...
coo
ti,re
'
...
X20
,:3.
coo
`''>
n.
`°'
may
-
0.'ipp.,
.am.
ti'q-,
ti.,,tea.
e°°Z
°,c`"
owl
136 LECTURES IN PROJECTIVE GEOMETRY CHAP 7
pi n ... n pm. Proceeding in this way in several steps to q, we seethat if q is dependent on pl, - , pm, then q contains pi n p2 n n pm.
Conversely, suppose q contains pi n n pm = T. The proof is byinduction on in. If q contains pi r1 n p._1= R, then we are throughby induction. We suppose, then, that q does not contain B ; but q doescontain R r1'pm. Thus, if R is r-dimensional, then T is (r-1)-dimen-sional. Let U=pm r' q. We seek a hyperplane q' that will containR and U. To see why, suppose we had such a hyperplane. Then q'depends on pm and q, but not on p.-otherwise it would be pm and pmwould contain B, which is not so ; so by dependency theory in S',q depends on pm and q'. By induction q' depends on pl, , pm-1,hence by transitivity of dependence in S', q depends on pl, , pm.Thus it remains to find q'. Now
dim[R, U] = r+n-2-dim (R r1 U) = r+n-2-(r-1) = n-1,so [R, U] is the desired hyperplane q'.
THEOREM 14. Every subspace of S' consists of all the hyperplanescontaining a subspace of S; and conversely, all the hyperplane8 contain-ing a given subspace of S constitute a Subspace of S'. All thehyperplanes on an r-dimensional subspace of S' form an (n - r -1)-dimensional subspace of S'. In particular, S' is n-dimensional.
MOOF. Every subspace of S' consists of the Points Q dependent onsome Points pi,- , i.e., consists of all hyperplanes q containingpi r1 n pm. 'This proves the first point and the second point isproved similarly. If L is an r-dimensional subspace of S, then byTheorem 12 it is the intersection of n - r but no fewer hyperplanes, sayof pl, - , p, Thus the Points q that are the hyperplanes containingL are the Points depending on pi, -, pn-r The Points pi, - - , pn-rare independent, as otherwise the Points dependent on these would alsobe dependent on some proper subset of them, so that L would be theintersection of fewer than n - r hyperplanes. Hence the space ofPoints q is (n-r- I)-dimensional. Since the empty set is (- 1)-dimen-sional, S' is n - (- 1) -1= n-dimensional.
Starting from S', we can build its dual space S". The points of S"are the hyperplanes of S'; we will write Hyperplanes when referring tothe (n-1)-dimensional subspaces of S'. Given a subspace L of S weassociate with it a subspace L' of S', namely, the set of hyperplanes on L.Similarly we associate with L' a space L" of S". Our next object is toprove the following theorem.
THnoREM 15. The dual of the dual of S is isomorphic to S. Moreover,if L is a point of 8 and L" is the corresponding point of S" described
QE
D
...
coo
gym
,moo
DA
'
red
+a+
3
a_.
0.,e,
^^^111
Sxc. 5 HIGHER-DIMENSIONAL SPACES RESUMED 137
above, then the mapping L - L" is an isomorphism of S and S", calledthe canonical isomorphism (of S with S").The main point of the proof is contained in the following lemma.
LEMMA. Let H1, H2, H3 be three points (of S) and consider the corres-ponding three hyperplanes Hl', H2', Hs' (of S'). Then Hl', H2', Hs'are on a common Line (of S") if and only if H1, H2, H3 are on a commonline.
rROOF OF THE LEMMA. Hl', H2', H3' are on a common Line if andonly if Hi' n H2' r) Hs' is (n-2)-dimensional. Here Hi n H2' n Hs'means the set of hyperplanes on H1 and on H2,and on H3. By Theorem14, the dimension of this set (space) is n -1- dim [Hl, H2, Hs]; and thisis n - 2 if and only if dim [H1, H2, H3] is 1, i.e., if and only if H1, H2, Hsare on a line. Q.E.D.
5. The analytic case. Let K be a (commutative) field. By a point(in the analytic case) we will mean a class of (n+1)-tuples
{(AXo, Axl,..., AX'n)},
where the x= are numbers from K not all zero and A varies over K exceptthat A 96 0 : a n y one of the n-tuples (Axo, Ax1, , Ax,) is called a repre-sentative of the point. We abbreviate, writing x for (xo, , andAx for (Axo, - , Ax, ). We write Px or Px for the point having x as repre-sentative ; where no confusion is likely, we refer to the point x (ratherthan Px). We say that Px, Py, Pz are collinear if one of x, y, z is alinear combination of the others. If n >- 2, as we shall assume through-out, then there exists noncollinear points. The other axioms for pro-jective space can be easily verified (for arbitrary n) by techniques wehave already studied. This model of projective space is designatedPNKn (= projective number space over K of dimension n). (Also forn = 0, 1 one refers to the spaces PNKO, PNK1.)
Dependence is defined in terms of collinearity, but for PNKn wewant an analytic expression of dependency. If Px is directly depen-dent on Py, Pz, Pw, - -, then x is a linear combination of (one or twoof) y, z, w, ; and since a linear combination of linear combinationsof y, z, w, is a linear combination of y, z, w, , one sees that if Pxis dependent on Py, Pz, Pw, , then x is a linear combination of y, z,w, .. Conversely, if x # (0,. , 0), and if x is a linear combination ofy, z, w, . . . , then one sees that Px is a dependent on Py, Pz, Pw, .
Of the points
eo = (1, 0,..., 0), el = (0, 1, 0,..., 0), e2 = (0, 0, 1, 0,..., 0),...,one sees that none is a linear combination of the others ; hence these
004
CD
°SI
NN
coo
.-.
138 LECTURES IN PROJECTIVE GEOMETRY CHAP. 7
n + 1 points are independent. Since every (n + 1)-tuple is clearly alinear combination of eo, - , en, these form a basis of PNKn. ThusPNKn is an n-dimensional space.
The next main point is incorporated in the following two theorems.
THEOREM. The set of solutions (different from (0, 0, , 0)) of a linearequation aoxo + + anxn = 0, where not all at = 0, is an (n -1)-dimensional space.
]PROOF. If y, z are two solutions of the equation, then so is Ay+µz,from which one sees that the set of solutions yields a space (see p. 128).Next we find a basis for this space. Not all at = 0, say ao # 0. If we fixthe values of xl, -, xn, the equation aoxo + + anxn = 0 determinesuniquely a solution xo, x1, , xn. Let us fix successively x1=1,X2=0, , xn = 0 ; then xi = 0, x2 =1, xs = 0, ; etc. We get solutionsu1= (Cl, 1, 0, ... , 0), u2 = (C2, 0, 1, 0, .. , 0), us = (C8, 0, 0, 1, 0, .. , 0), etc.These are n independent points. Thus the space in question is either(n -1)-dimensional or n-dimensional ; but as not every point yields asolution to aoxo+ + anxn = 0, the possibility of being n-dimensionalis excluded.
TsEOREM. Every (n-1)-dimensional subspace H consists of thesolutions (not counting (0, 0, ,0)) of a linear equation aoxo + +anxn = 0 with not all at = 0.
PROOF. Let x(1), , x(n) be a basis of H. We propose to find alinear equation aoxo + + anxn = 0, with not all at = 0, havingx(1), , x(n) as solutions. In that event, the (n -1)-dimensional spacegiven by the equation contains the (n -1)-dimensional space H, andhence, by a previous theorem, must coincide with H.
To complete the proof, we need the following lemma.
LEMMA. A system
aooxo+aolxl+ +aonxn = 0
amoxo+amixl+ +amnxn = 0of homogeneous linear equations in which the number of equations is lessthan the number of unknowns always has a nontrivial solution.
The proof is by induction on the number of unknowns and followseasily by eliminating one of the unknowns. To save space, we omitwriting out the details.
To continue with the proof of the theorem, we are looking for num-bers ao, , an such that
...!:
J
coo
"by
°+b
ti!°°
''F
L"
n^R
o&'
'a.
coo
L'.
m'6
O,^ ..q
...'ca
-4Z3.'F
_m%
.o'm
f""
''1
'E"
ti,m
4°m
ho
X00
L14
c. 5 HIGHER-DIMENSIONAL SPACES RESUMED 139
aoxo(1)+alxl(1)+... +anxn(') = 0aoxo(2)+ajxj(2)+ ... +anxn(2) = 0
aoxo(n) +alxl(n) + ... +anxn(") = 0.
By the lemma, this system has a nontrivial solution (ao, , an). Q.E.D.
Just as in the case n = 2, one can show for arbitrary n that aoxo + +anxn=0 and boxo+ +bnxn=0 have the same solutions if and only if(ao, , an) and (bo, , bn) are multiples of each other. Thus thehyperplanes of PNKn can be represented, in one-to-one fashion, as thepoints of a second PNKn. This second PNKn is the dual of the first;but there is one thing that remains to be proved for this to be estab-lished. Dependency is defined in a standard way in the dual space andis also defined in a standard way in the second PNKn referred to. Itremains to be seen that the two ways coincide. Since dependence isdefined in terms of collinearity, it is sufficient to see that the notion ofcollinearity in the dual space coincides with that notion in the secondPNKn. This comes to establishing the following theorem.
TaEOREM. Let H,: aoxo+ +anxn=0; Hb: boxo+ +bnxn=0;H.: coxo + + cnxn = 0 be three distinct hyperplanes. Then H.contains H. n Hb if and only if c is a linear combination of a and b.
Fi&ooF. If c=Aa+µb, then clearly every common solution ofaoxo+ +anxn=0 and boxo+ +bxn=0 is a solution of coxo++ cnxn = 0, so H. contains H. n Hb. Conversely, let H. containH. n Hb. The space H. n Hb is (n - 2)-dimensional. Let P, be apoint in H. not in H. n Hb. Write down the condition that somelinear combination of aoxo + +anxn and boxo+ +bnxn vanish atv: namely, write A(aovo+ +avn)+p(bovo+ +bnvn)=0. This isone equation in two unknowns (A, µ), which therefore has a nontrivialsolution : let us designate one such as (A, µ). Moreover, d = .1a + µb # 0 ;otherwise H. would equal Hb. Consider now the hyperplane Hd : it isspanned by a basis of H. n Hb and P,; hence Hd is contained in H.,because the mentioned basis for Hd belongs to H.. Hence Hd = H0since Hd, H. have the same dimension. Therefore c is a multiple of dand so is a linear combination of a and b. Q.E.D.
We leave it as a not difficult exercise to show that all the above con-siderations hold also for K not necessarily commutative. As a pre-caution, we emphasize that one will speak of a right PNKn and a leftPNKn : in a right PNKn a point consists of a (n + 1)-tuple (96 (0,. .,0))and its nonzero right multiples ; similarly for a left PNKn. The dualof a right PNKn turns out to be a left PNKn. (In the case that K isnot commutative, a given PNKn and its dual do not look alike ; in case
amp
140 LECTURES IN PROJECTIVE GEOMETRY Cases. 7
K is commutative it would appear that the given PNKn and its dualPNKn are alike. Well, they are alike, but they are not the same, so itis convenient to regard a point as a class of column (n + 1)-tuples and ahyperplane as a class of row (n + 1)-tuples ; this is a convenient rota-tional device.)
Exercises
1. Let P. be a point of a PNKn. The hyperplanes on P. constitute ahyperplane of the dual space ; and this hyperplane is represented as a (column)(n+ 1)-tuple b (and its non-zero multiples) in the dual of the dual of the givenPNKn. Show that b is a multiple of a.
2. Let Pa(o), Pa(i), , Pa(n) be points in a PNKm, and let themgenerate a c-dimensional space. Show that the points P. for whicha(°)xo+ +a(n)xn=0 form an (n-c-1)-dimensional subspace of PNKn.Hence, exhibiting a(°), , a(n) in the form
ao(0)'
.. '
fi(n)
am(O), am(n) ,
show that the rows of this array generate a c-dimensional space in PNKn.
By the column rank of a matrix one means the dimension of the spacegenerated by the columns ; similarly for row rank. The last exerciseshows that column rank = row rank ; and this number is called the rankof the matrix.
Exercise. Let U, V be matrices such that UV is defined. The columnsof U V are linear combinations of the columns of U; hence rank U V:5 rank U.By a similar argument on the rows of V, rank UV 5 rank V.

G."
CHAPTER VIII
COORDINATE SYSTEMS AND LINEARTRANSFORMATIONS
1. Coordinate systems. Let K be a commutative field and considerthe analytic model of the plane which was constructed in Chapter III,
xoSection 3. We recall that a point P is a column (XX'1) of numbers, not
oall zero, together with all multiples .1x1 , A # 0. It is incorrect to refer
x2xo
to xl as a point, since a point is not just one triple, but a collection ofx2
xotriples; it is correct, however, to refer to the point P xl . Similarly a
x2line is a triple (ao, a1, a2), not all zero, together with its multiples(µao, µa1, µa2),µ 540. We use the abbreviated notation x to stand for
xothe triple xl ; and similarly a to stand for the triple (ao, al, a2).
x2
One will have to tell from the context whether a triple c is a row tripleor a column triple. We say that x represents the point P., or is arepreeentative of P,
Two triples x, y are called equivalent if x = Ay, A 960. In mathe-matics, whenever the word equivalent is used, say in the expression xis equivalent to y, or notationally x-y, it is important to check thefollowing three properties :
r : x - x for every x (reflexivity)s : if x - y, then y - x (symmetry)t: if x-y and y-z, then x-z (transitivity).
141
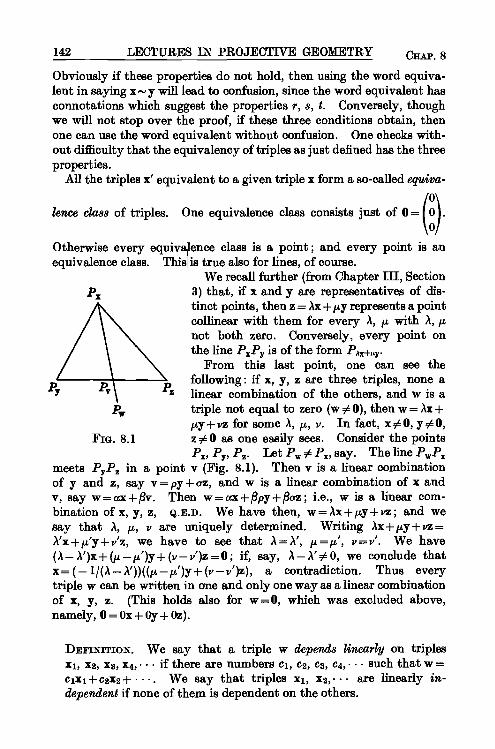
--4
Cps
(ND
a,-
III
%p-
ego
rye
'.3
F.'doF.'
s7'III
.°a
142 LECTURES IN PROJECTIVE GEOMETRY CHAT 8
Obviously if these properties do not hold, then using the word equiva-lent in saying x - y will lead to confusion, since the word equivalent hasconnotations which suggest the properties r, 8, t. Conversely, thoughwe will not stop over the proof, if these three conditions obtain, thenone can use the word equivalent without confusion. One checks with-out difficulty that the equivalency of triples as just defined has the threeproperties.
All the triples x' equivalent to a given triple x form a so-called equiva-0
knee class of triples. One equivalence class consists just of 0 = (0)_0
Otherwise every equiv ence class is a point ; and every point is anequivalence class. true also for lines, of course.
P.
FIG. 8.1
We recall further (from Chapter III, Section3) that, if x and y are representatives of dis-tinct points, then z = Ax +µy represents a pointcollinear with them for every A, µ with A, µnot both zero. Conversely, every point onthe line PxP7, is of the form Pox+,.y.
From this last point, one can see thefollowing : if x, y, z are three triples, none alinear combination of the others, and w is atriple not equal to zero (w 0), then w = .1x +µy + vz for some A, p, v. In fact, x :A 0, y ;A 0,z zA 0 as one easily sees. Consider the pointsPx, Ps., P. Let P. :A Px, say. The line PWPx
meets PyPE in a point v (Fig. 8.1). Then v is a linear combinationof y and z, say v = py + oz, and w is a linear combination of x andv, say w=ax+fv. Then w=ax+Ppy+Paz; i.e., w is a linear com-bination of x, y, z, Q.E.D. We have then, w=Ax+µy+vz; and wesay that A, µ, v are uniquely determined. Writing Ax + µy + vz =A'x+µ'y+vz, we have to see that A= A', µ=p,', v=v'. We have(A-A')x+(p-14')y+(v-v')z=0; if, say, A-A' 0, we conclude thatx=(-1/(A-,1'))((µ-µ')y+(v-v')z), a contradiction. Thus everytriple w can be written in one and only one way as a linear combinationof x, y, z. (This holds also for w = 0, which was excluded above,namely, 0 = Ox + Oy + Oz).
DEFINITION. We say that a triple w depends linearly on triplesxl, x2, X3, x4, if there are numbers cl, G2, C3, C4i such that w =clxl+c2x2+ . We say that triples xi, x2, are linearly in-dependent if none of them is dependent on the others.

oft
CS'
ear
o-3
o-+
Abp
°;` cu
e
.O.
0-+
r,o-
.3
.-ti
a".
0...
-'ad"+
y'4
SEC. 1 COORDINATE SYSTEMS, LINEAR TRANSFORMATIONS 143
Exercise. Prove that xl, x2i are independent if and only if clxl+e2x2+ ... =0 implies c1=c2= ... =0.
We can sum up the last paragraph as follows.THEOREM. Let x, y, z be linearly independent triples. Then anytriple w can be written uniquely in the form w = Ax+µy+vz.
Let PX, Py, PZ be three noncoMnear points, P,, a fourth point. Onecould try to introduce new coordinates for Pa, relative to Pz, Py, P. asfollows': write w = Ax + µy + vz and take (A, µ, v) as the new coordinates.This fails, though, because by varying the representative x of P,, onecan vary A at will; similarly for µ, v. Clearly, if we can vary (A, µ, v)at will, they cannot serve as coordinates for P.
One can remedy the defect as follows. Let P6 be a fourth point notcollinear with any two of P,r, Py, P. Let g be a representative for Pgand let us impose the condition that representatives x, y, z be taken sothat g = 1 x + 1 y + 1 z, i.e., the multipliers should be 1. We cando this, because if x, y, z are any representatives of P=, Py, P., we haveg = px + oy +Tz and it is only necessary to take px, ay, -rz instead ofx, y, z as representatives to get the multipliers to be equal to 1. More-over, since p, a, T are uniquely determined, we see that there is (one and)only one way to select the representatives of P., Py, PE, so that g willbe the sum of them. For any point P.,, we write (for the x, y, z selected
A
as stated) w = Ax +,uy + vz and call µ the coordinates of PW relative tov
Px, Py, PZ, Pg. We also note that if Kw instead of w were taken asrepresentative of P.,, then we come out with coordinates (KA, Kµ, Kv)instead of (A, it, v). But this does not disturb us, since even for the old,or original coordinates, there was an arbitrary factor coming in. Alsoobserve that if Kg instead of g is taken as representative of PB, thenthis changes the x, y, z to be selected to Kx, Ky, Kz, where x, y, z are
the representatives first selected. Writing w = (Kx) + () (Ky) +K K
(L) K(Kz) we get (ASK, PIK, vIK) instead of (A, p, v), again a change by a
factor. (The last three sentences show that the variable elementsentering the definition influence the result (A, µ, v) only by a factor.)To sum up:
DEFINITION. Let P,r, Py, PE, Pg be four points, no three collinear.Let x, y, z, g be representatives for them such that g = x + y + z. Let
A
Pw be an arbitrary point and write w = Ax + µy + vz. Then (/) arev
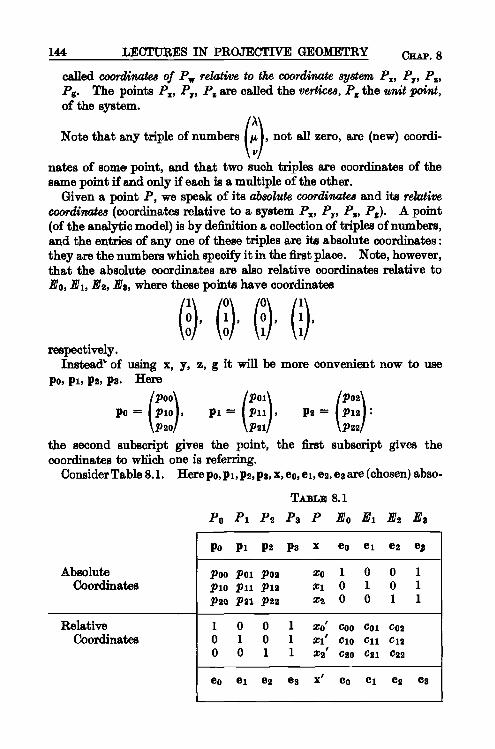
°O~
.,M
rte-
.-r
144 LECTURES IN PROJECTIVE GEOMETRY Cser. 8
called coordinates of P. relative to the coordinate system PZ7 Py, P,,Pg. The points P=, Py, P, are called the vertices, Pg the unit point,of the system.
not all zero, are (new) coordi-Note that any triple of numbers (/:) ,A
nates of some point, and that two such triples are coordinates of thesame point if and only if each is a multiple of the other.
Given a point P, we speak of its absolute coordinates and its relativecoordinates (coordinates relative to a system P=, Py, P., Pg). A point(of the analytic model) is by definition a collection of triples of numbers,and the entries of any one of these triples are its absolute coordinates :they are the numbers which specify it in the first place. Note, however,that the absolute coordinates are also relative coordinates relative toEo, E1, E2, Es, where these points have coordinates
1 0 0 1
0 1 0 1,0 0 1 1
respectively.Instead` of using x, y, z, g it will be more convenient now to use
P0, P1, P2, pa. Herepoo pol po2
PO = (P10), P1 = p11 , P2 = p12V20
p2l p22
the second subscript gives the point, the first subscript gives the
coordinates to which one is referring.Consider Table 8.1. Here po, p1, P2, ps, x, eo, ei, e2, eg are (chosen) abso-
TABLE 8.1
Po P1 P2 P$ P Eo E1 B2 B3
AbsoluteCoordinates
RelativeCoordinates
p0 P1 P2 p3 x eo el e2 ee
Poo P01 p02 xo 1 0 0 1
plo P11 p12 xl 0 1 0 1
p20 P21 p22 X2 0 0 1 1
1 0 0 1 xo' coo col eo2
0 1 0 1 x1' C1o X11 C12
0 0 1 1 x2' C20 C21 C22
e0 el e2 es x' CO C1 C2 Cg
ado
no.'
0.1
°14
obi0'-.
a-8
f."0.1
Snc. 1 COORDINATE SYSTEMS, LINEAR TRANSFORMATIONS 145
lute coordinates of Po, Pi, P2, P3, P, Eo, El, E2, E3, respectively; andeo, ei, e2, e3, x', co, ci, C2, c3 are the respective relative coordinates(uniquely determined through po, pi, p2). We set the following twoproblems :
(a) Given the absolute coordinates x of an arbitrary point P, how
does one compute its relative coordinates x'?(b) Given the relative coordinates x' of an arbitrary point P, how
does one compute its absolute coordinates x?Before entering into the solution proper, we consider some compu-
tational rules that ease what has to be written. These rules concernmatrices : a matrix is simply a rectangular array of numbers (entries
/ail a12 ... al,,
a21 a22 ... as,,
am, amt ... amnlfrom K). Note that the first subscript gives the row, the second sub-
bl
b2
bscript the column. Let (al, , a 1 x n matrix and I an
n x 1 matrix (number of rows is given first). We define the product ofthese two matrices as follows :
(a,,..., a.) - (aibi+a2b2+ ...bb i\
in other words, as the number (or more strictly speaking, the 1 x 1matrix) albl+ +a,,b,,. This way of combining two n-tuples is veryfrequently encountered and is called the inner product of a and b ;notation a b ; it is also called the scalar product. More generally wewill define the product A A. B of an r x 8 matrix A by an 8 X t matrix B.Note that we require the number of columns of A to be equal to thenumber of rows of B. This will be necessary because the product A Bis defined in terms of the inner products of the rows of A by the columnsof B. In fact, by definition A B i8 an r x t matrix whose entry c{5 inthe ith row and jth column is obtained a8 follows : c;i i8 the inner productof the ith row of A and the jth column of B.
Exercises1. Compute 2 3 4 5 1 0 2
-1 2 3) 6 1 0 -11 1 0 3

coo
Cry.,y
146 LECTURES IN PROJECTIVE GEOMETRY CHAP 8
2. Find two 2 x 2 matrices A, B with numerical (not literal) entries suchthat ABOBA.
Let A, B, C be matrices, r x 8, 8 x t, and t x u, respectively. One canform A A. B ; the result is r x t ; and this can be combined with C to give(A B) C. Similarly we can form B B. C, then combine it with A to getA (B - C). The following theorem is a basic one, called the associativityof matrix multiplication.
THEOREM.
Exercise. Verify the theorem for_ all a12'1 _ bll b12l = c11 C12).A_ \a21 a22,
B_ \b21 b221
C - \C21 C22PROOFOF THE THEOREM. We compute the element in the ith row
and the lth column of (A B) C ; and similarly compute the element inthe ith row and the lth column of A A. (B C). Then we compare thetwo, and see that they are equal : this will give the proof.
To get the element in the ith row and lth column of (A B) C, weneed to know the whole ith row of A A. B. This is obtained by multiply-ing the ith row of A by the various columns of B ; we get
j=a j=8 j=a
atjbji, I aijbja, ... , aijbja,j=1 j=1 j=1
j=ewhere aijbjl abbreviates atlbij+a12b21+ +ai8b8i. Now we have
j=1to take the inner product of this row with the lth column of C. This
gives I I (j atjbjk )cxaI Similarly we compute the element in the:k=1 L\j=1 /
ith row and lth column of A A. (B C), and find it to be
;1 l ail(k t bjkckl)I.
Now the question is : Why are these two expressions equal. Applyingfamiliar rules on the first expression, i.e., expanding it and eliminatingparentheses, one finds that it is the sum of the terms aijbjkckl for allpossible values of j (j =1, . , 8) and k (k =1, , t). Similarly for theother expression. The two expressions are the sums of the same terms,hence equal. Q.E.D.
We go back to the questions raised on p. 145. Let P= (po, p1, p2);P is a 3 x 3 matrix. Consider the point P, which has relative coordi-nates x'. By definition, then, poxo'+pix1'+p2xa' are absolute coordi-nates for P. This last column can be written Px', i.e., (po, p1, p2)x'.The result can be put as follows.

GI'
."`Q
SEC. 1 COORDINATE SYSTEMS, LINEAR TRANSFORMATIONS 147
THEOREM. To get the absolute coordinate8 of a point, multiply its(column of) relative coordinates (on the left) by the matrix P = (P0, P1, P2).Here po, P1, P2 are the absolute coordinates selected for the vertices uf'the coordinate system POP1P2P8.
This theorem can be easily remembered. One cannot forget thatthe change in coordinates takes place by multiplying by a 3 x 3 matrix ;the only question is : Which matrix? Now note that any 3 x 3 matrix
1 0 0times 0 gives its first column, times 1 its second, times 0 its
0 0 (1)third. On the other hand, the change transforms
1 poo(01)
pol 0 pot0 to pio , to p11 0 to p12 ,
0 p2o 0 p21 1 p22
poo poi p02so that the matrix must be p1o p11 p12
p20 P21 P22)
Now to go from the absolute to the relative. We have :
X0 1 0 0 xoxl = 0 1 0 xl = (eo, el, e2)xX2 0 0 1 x2
= (PoCOO+plCio+p2C2o, POCO1+P1c11+p2C21, POC02+P1C12+p2C22)x
poo POI p02 coo 001 Cot x0p1o P11 P12 C10 C11 C12
XI= (PC)x = P(Cx)
P20 p21 p22 C20 021 022 x2
(by associativity)
(:)_ (P0, P1, P2) ,
z2
z0 x0 z0
where zl = C xl ; but then, by definition, zl are relative coordi-z2 x2 z2
xonates of P, and these, in Table 8.1, we called x1 . Therefore x' =Cx.
x2
THEOREM. To get the relative coordinates of a point, multiply its

iii
goo
148 LECTURES IN PROJECTIVE GEOMETRY CHAP. 8
(column of) absolute coordinates (on the left) by the matrix C = (co, cl, c2).Here (CO, Cl, c2) are the relative coordinates for the points Eo, El, E2.
Of course, for this theorem really to answer the question of how topass from absolute to relative coordinates, we should know how tofind C. We shall take this up systematically ; meanwhile, here is anexercise.
/1 2 6Exercise. Let Po: 121, Pl : (00), P2 : 31, Pg : (6 ). Find the coordinates
3 1 4 7
of Eo, El, E2, E3 relative to the coordinate system POP1P2P3
1
Let A be a matrix with 3 columns. Note that A 0 gives the first0
column of A, and that Ax will yield the first column of A for all A only1
imilarly for the second and third columns. We designateif X= (.00 S
1 0 0
the matrix 0 1 0 by E. It is neutral on the right : AE = A ; and1
it is the only matrix with this property for all A. Similarly EB = B forany 3-rowed matrix B.
One further remark on matrix notation. Just as for vectors wexo cxo
write c xl = cxl , so for matrices we writex2 ex2
aoo aoi aso oo calo ca2o
C a10 all as = calo call caal
ago all a22 ca2o call ca22
A similar notation holds for arbitrary matrices. Note that cAB =AcB for any matrices A, B that can be multiplied.
THEOREM. PC=E. CP=E.
PROOF. Let P be a point having absolute coordinates x. Then Cxare relative and therefore P(Cx) are absolute coordinates of P. Thisdoes not quite give PCx = x but only PCx = Kx. This is enough to show
K 0 0that PC is of the form 0 K 0 ; moreover K does not depend on x,
00 0 K
since forming PC does not depend on x. It remains to be seen that

SEC. 1 COORDINATE SYSTEMS, LINEAR TRANSFORMATIONS 149
K =1. This will be seen if we see that for some point with coordinates1
x we get PCx = x. Consider the point with absolute coordinates 0 .0
1
Then C 0 =coo
010 and these numbers were taken so that pocoo+0 02o
1
plcl0+p2c20= 0 . Hence for x=eo, PCeo=eo, so K=1. (Computa-0
tions on p. 147 also show that PC = E.)
A 0CP= 0 A
0 0
Similarly we find
0
0,A
and want still to prove that A =1. We get PCP=PA, whence P = PA(since PC=E). This gives A=1.
THEOREM. PD=E implies D=C. DP=E implie8 D=C.
PROOF. PD = E implies CPD =C ; CP = E, whence D=C; similarlyfor the second statement.
The matrix P arose from a geometrical situation, but obviously anymatrix P with its 3 columns linearly independent can occur in such asituation ; we simply take for Po, P1, P2 the points whose coordinatesare given by the columns of P. Hence :
THEOREM. For any matrix P with linearly independent columns,there is a matrix C such that PC = E, CP = E.
THEOREM. For P as in the last theorem, there is only one C such thatPC = E ; and there is only one C such that CP = E.
PROOF. From PC = E and PD=Ewe are to prove C=D; here wemay assume C to be the C of the last theorem. Then CPD =CE =C, soED=C or D=C. Similarly suppose DP=E. Then DPC=C andD=C.
THEOREM. The columns of C (where PC=E) are linearly independent.
PROOF. We have to see that 00x0 + clxl + 02x2 = 0 implies xo = x1=X2 = 0. The given equality can be written Cx = 0. Multiplying by P,we get PCx = 0, whence x=0. Q.E.D.
The relations between P and C are symmetric : P and C both havetheir columns linearly independent and each times the other, in either
BC
D Moo
...
150 LECTURES IN PROJECTIVE GEOMETRY CH". 8order, is E. Each is called the inverse of the other, and one writes0 =P-1, P=C-1.
2. Determinants. We suppose that determinants and their basicproperties are known from other courses, but let us recall some of them.First a determinant is a number associated in a certain way with asquare matrix. For the matrix
(all ... aln
aril ... ann
the notation isall ... a is
aril ... aria
For a 2 x 2 matrix (Ca d) the determinant has the value ad - be.
Notationally lc dl =ad -/be. We may regard this as a definition.
all a12 a13
To give the value of a 3 x 3 determinant a21 azz ass , it is convenientasl ass ass
to define the cofactors : the cofactor of any element aq is ± the 2 x 2determinant obtained upon deleting the row and column containing au ;
+ - +the, + or - is taken according to the pattern - + - Thus the
+ - +
cofactor of an is +laze azzl . the cofactor of azs is -lall a12l. Theasl a32 aal ass
value of the determinant is the inner product of any row or column bythe corresponding row or column of cofactors. For example, takingthe second column :
O=all a12 a13
a21 a22 azs
asl ass ass
= -alz a21 ass
a31 ass
all+aza1a31
asal-a321a21 azsl'
or taking the third row :
- aslla22 anal- as2la21
azsl
+assla211 a12
a 1 azz
Letting Atl represent the cofactor of a{5, the first equality can be writtenA=a12A12+a22A22+as2As2; the second A=as1As1+as2A32+as3A8sIn this way we get six expressions for A. We could take any one ofthem as the definition, but then it would be a theorem that the otherfive give the same result. For the time being, however, we are notconcerned with an elegant treatment of determinants, but only a rapidrecollection of some of the basic facts.
'flu
SEC. 2 COORDINATE SYSTEMS, LINEAR TRANSFORMATIONS 151
We recall:
(I)
all cats aiaall case asa
as, cass as
= Call ais alsasi a22 a23
as1 a32 ass
and similarly, a factor can be removed from any row or column.
all ala + b12 ais
ash ass + bas asa
as, ass+b32 ass
all an aiaa21 a22 asa
as, a32 ass
all
aai
aai
bis aisb22 ass
bas ass
and similarly for any row or column.(III) Interchange of two rows or two columns negates the determi-
nant.1 0 0
0 1 0
0 0 1
= 1.
(V) determinant (AB) = (determinant A) (determinant B).
IABI =IAI IBI(VI) Inner product of any row of A by cofactors of the same row
gives IAI; and inner product of any row by cofactors of adifferent row= 0; similarly for columns.
(VII) With appropriate notational changes, properties I-VI holdalso for n x n determinants.
ThEOREM. If P ha8 linearly independent column, then det P#0.
PROOF. PC = E for some C. det P det C = det E (by V) and =1(by(IV). Hence, det P # 0. Q.E.D.
all ais ala
The tranpoee of a21 ass ass is obtained by interchanging rowsasi ass ass
ail a21 as,
and columns; in other words, it is als a22a32).
A square matrixais a23 ass
A and its transpose AT have equal determinants : IAI = I AT I .
all a12 als Aii A21 A31 0 0THEOREM. fasl ass ass A12 A22 Ass = A
C0 ,
asi a32 ass A13 Ass Aas 0o A
where A =alla12
ais aiaass asa .
asi asa ass
PROOF. The entries in the product are obtained by multiplying the
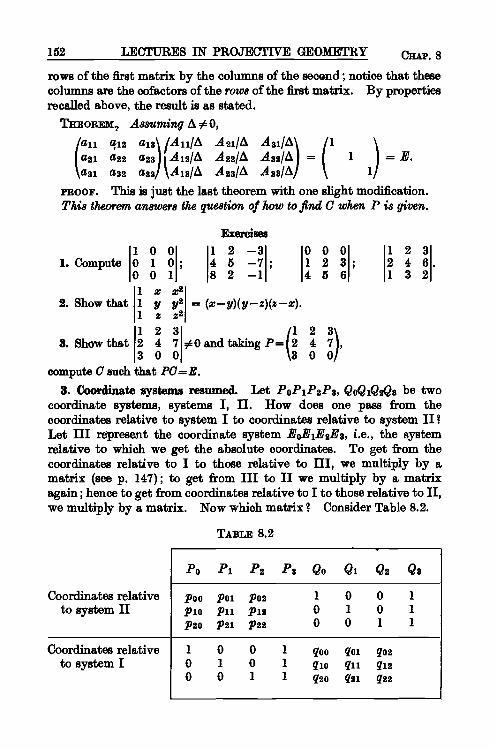
0I0
moo
G'9
e+,
.-1
152 LECTURES IN PROJECTIVE GEOMETRY CHAP. 8
rows of the first matrix by the columns of the second ; notice that thesecolumns are the cofactors of the rows of the first matrix. By propertiesrecalled above, the result is as stated.
TBEomcm. Assuming A # 0,all a12 ais fAli/A A21/0 As1/0 1
a21 a22 ass Ail/b A22/A A32/O = 1 J = E.a31 ass ass `A1a/A A2s/0 A33/A) 1
PnooF. This is just the last theorem with one slight modification.This theorem answers the question of how to find C when P is given.
Exercises
4 5 -7 1 2 3 2 4 61. Compute 10 0 1I 18 2 -1 I
14
5 61 11 3 2
1 x x22. Show that 11 y y2l = (x-y)(y-z)(z-x).
1 z z2
1 2 3 1 2 33. Show that 2 4 7
00and taking P = (2 4 71,
3 0 0 3 0 0/compute C such that PC=E.
3. Coordinate systems resumed. Let P0P1P2Pa, QoQ1Q2Qs be twocoordinate systems, systems I, II. How does one pass from thecoordinates relative to system I to coordinates relative to system II?Let III represent the coordinate system E0E1E2E3, i.e., the systemrelative to which we get the absolute coordinates. To get from thecoordinates relative to I to those relative to III, we multiply by amatrix (see p. 147); to get from III to II we multiply by a matrixagain ; hence to get from coordinates relative to I to those relative to II,we multiply by a matrix. Now which matrix? Consider Table 8.2.
Coordinates relativeto system II
Coordinates relative
to system I
TABLE 8.2
Po P1 P2 P3 Qo Q1 Q2 Qa
p00 P01 P02 1 0 0 1
P10 111 P12 0 1 0 1
P20 P21 p22 0 0 1 1
1 0 0 1 qoo qol qo21
0 1 0 1 q1o q11 q120 0 1 1 q2o q21 q22
p,,
o''
Is'
C+
-O
''F-
1
Is'
:..
a..
e+.
...e+
-'.y
...co
o
R''
o-+
,
Sic. 4 COORDINATE SYSTEMS, LINEAR TRANSFORMATIONS 153
THEOREM. (Compare pp. 147-148). To get the coordinates of a pointrelative to system I, multiply its column of coordinates relative tosystem II (on the left) by the matrix whose columns are the coordinatesin system I of the vertices of the coordinate system II.
PROOF. We need the matrix which times eo gives qo, times el givesql, times e2 gives q2. This is the matrix (qo, qi, q2)-
4. Coordinate changes, alias linear transformations. Let x, x' be thecoordinates of a point P in two coordinate systems. Then we haveseen that x, x' are related by equations : x'=Ax. Here the matrix Ahas linearly independent columns.
The equations x'= Ax tell us how to pass from the old name of a pointto a new name of the point. There is another way, however, of lookingat these very same equations, namely, as a way of passing from the pointx to another point x' whose coordinates (in the original coordinatesystem) are given by Ax. In the first way of looking at x'=Ax we havetwo coordinate systems and no transformation of points ; in the secondway, we have only one coordinate system, but the points are movedabout according to the rule : x - Ax. In the first way, points areassigned new names, and one speaks of an alias transformation ; in thesecond way, points are assigned new locations, and one speaks of analibi transformation. We thus have two distinct interpretations ofthe formula x'=Ax. It is clear that results for one interpretation canbe translated into results for the other ; because of this, in consideringthe formula x'=Ax one may shift back and forth between the twointerpretations, and sometimes it is convenient to do this.
The transformation x'=Ax, regarded as an alibi transformation, iscalled a linear transformation. In the above discussion of coordinatechanges, the matrix A had, and necessarily had, linearly independentcolumns ; but one can also consider a transformation of points given byx'=Ax, where A is arbitrary. It is true, here, that if A has linearlydependent columns, then for some point (or points) x we shall have
0Ax = (0), so that x is not assigned to a point : all the same one can study
0such transformations-they are called singular. However, we willconfine ourselves to the so-called nonsingular linear transformations.
Of course, distinct points in a coordinate change get distinct names.Therefore in terms of alibi transformations we have :
T EOREM. A (nonsingular) linear transformation sends distinct pointsinto distinct points. (Transformations that map distinct points intodistinct points are called univalent or one to one.)
`-I
arm
p,.
CD
R
(CD
154 LECTURES IN PROJECTIVE GEOMETRY CHAP. 8
Exercise. Prove this anew and directly.
Having chosen P., P,,, P,, Pg as the vertices and unit point of a newcoordinate system, one obtains the new coordinates of a point P. bywriting w in the form w = Ax +,uy + vz, and then A, µ, v are the newcoordinates of w. But conversely, any three numbers A,,u, v not all= 0are the new coordinates of some point, namely, of w=,lx+µy+vz(w * 0, since x, y, z are linearly independent). Thus every name is thealias of some point. In terms of alibi transformations we have :
THEOREM. A linear transformation maps the plane onto itself, i.e.,every point arises as an image. In terms of a formula, this says thatif x' 0, then x'=Ax has a nontrivial solution (where, since we haveagreed to confine ourselves to the so-called nonsingular linear transfor-mations, it is understood that the columns of A are linearly independent).
Exercises
1. Prove the last theorem anew and directly.2. Translations, i.e., the transformations given in the affine plane by
equations of the form x'=x+a, y'=y+b are linear transformations. Thisis true also for rotations of the (real) Euclidean plane.
THEOREM. A linear transformation sends collinear points into collin-ear points.
PROOF. We may as well assume that the three points u, v, w aredistinct. Then w = Au + µv. The transformed points are Au, Av, andAw=A(,to+µv)=A(Au)+A(µv)=A(Au)+µ(Av), whence the trans-formed points are collinear. Q.E.D.
Thus a linear transformation induces a transformation of the lines,namely, we send a line l into the line l' that carries the images of thepoints of 1. How does one obtain the equation of I'?
Let (to, ei, fz) be the coordinates of 1, so that its equation is eoxl+eixi + e2x2 = 0, or more compactly, i; x = 0. Let the linear transforma-tion be given by x--> x'=Ax. Then x= A-lx' and we obtain g A-lx' =0; conversely, from g A-1x' = 0 one obtains g x = 0. Thus the con-dition on x' is that V-1 x' = 0; in other words, EA-1 are the coordinatesof l' (and gA-lx = 0 is its equation).
Exercise. Carry out all the above considerations for 3-dimensional pro-jective space.
We have defined a linear transformation of a plane as a (certain kindof) transformation of its points ; but in a plane, the points and the linesappear on the same level, dually, neither to be preferred over the other.

CD
.
I3+
YO
.
SEC. 5 COORDINATE SYSTEMS, LINEAR TRANSFORMATIONS 155
The linear transformation does, indeed, induce a transformation onthe lines, but if we want to maintain our impartiality to points andlines, then a linear transformation should be defined as a transformationon the points and on the lines simultaneously. It is a matter of aslight change in point of view, but if we want to proceed that way, wecome to the following definition :
DEFrxrrioN. A linear transformation is a transformation given byequations of the form
x>x' =Ax
where the first line gives the effect on points, the second the effect onlines.
From g'=gA-1 we see that lines are transformed by a matrix multi-plication, just as points are, and hence the last three theorems apply tolines also : i.e., the set of lines is mapped univalently onto itself, con-current lines being mapped into concurrent lines.
Exercise. Since the linear transformation x -k x' = Ax,, F' = A-1g mapsthe set of points univalently onto itself, and likewise for lines, it has an inversetransformation, namely, the one that sends x'-> x and g'--> g if the givetransformation sends x -- x', Show that this inverse is also a lineartransformation.
Linear transformations are incidence preserving, i.e., if x -+ x' and-- g', then x incident with g implies x' is incident with g,'. This is prac-
tically obvious, since the definition was put down in accordance withthe requirement of such an incidence preservation. Still we may notethat 9'. x'= A-'Ax = g x, in particular that g x = 0 implies g'. x' = 0,which proves that incidence is preserved. Also note that if g is notincident with x, that g' is not incident with x'.
Summing up these remarks we see that a linear transformation is aunivalent, onto, incidence preserving mapping of the set of points andset of lines of a plane, points going into points, lines into lines. Thus alinear transformation is an isomorphism of the plane onto itself. An"isomorphism onto self" is, however, an automorphism, so we can say :
THEOREM. A linear transformation is an automorphism.
The converse question of whether an automorphism is necessarily alinear transformation will be taken up in the next chapter.
Exercise: There is one and only one linear transformation taking thevertices and unit point of one coordinate system respectively into those ofanother.
5. A generalization from n - = 2 to n =1. For the most part the above
ZS
'
""'
2,4
Cs]
mm
"
..b
156 LECTURES IN PROJECTIVE GEOMETRY CHAP. 8
considerations can be extended without difficulty to higher-dimensionalspaces : instead of speaking of triples, one speaks of (n + 1)-tuples.Except for some basic facts on the linear dependence and independenceof such (n+1)-tuples, the considerations needed for the extension in-volve little more than changes in notation. Moreover, whatever thedifficulties are, if we are content to stick to the plane, they need not bemet. On the other hand, even confining ourselves to the plane, a2-space, we cannot avoid generalization entirely, because within the2-space, there are the 1-spaces, the lines; and as we shall see, one canspeak of coordinates on a line. Here there already arises a basicallynew phenomenon, namely, one will deal not only with a space itself,but also with the space relative to its subspaces : in the case of the plane,with the plane in relation to its lines ; in the case of 3-space, with the3-space in relation to its planes and its lines.
Let then l be a line in a plane, and let P4, PQ, be two points on 1.
For any third point P., we can write c2 = x000 + x,el, and try to take (x°)
as coordinates on l of P.,; but since co, Cl can be .varied, still remainingrepresentatives of P., Po1, we see, as similarly once before, that xoand xl can be varied arbitrarily. As before, we remedy the difficultyby taking three points Pte, Po4, P,;, on 1 and limiting ourselves torepresentatives co, cl, 02 such that c2=eo+cl. For any point Po on 1,if we write c=x000+x101, then we take xo, xl as the coordinates of P.on 1; and the points Pte, P4,, are called the vertices of the coordinatesystem, P,, the unit point.
Let now co, cl, c2 = co + ei be the vertices and unit point of one systemon 1, call it system I ; and let pop p1, p2 = po +pi be the vertices and unitpoint of another system, system II, on the same line. Writing any
point x of 1 in the form x0co+x1e1 and in the form xo'po+xl'pl, (x0)
will be coordinates of x in system I and (0,) will be coordinates of x
in system II. Let Co = Aoopo + Aolpl, c1= Alopo + Allpl, so that
xoco+x101 = (xoAoo+xlAlo)po+(xoAol+xlAl1)pl;
whence one finds that (x1, - (Aol All) (x1).Thus, just as for coor-
dinate systems of the plane, one passes from one system to another by amatrix multiplication ; and one finds that, having fixed on the repre-sentatives co, cl, pop p1, the matrices for passing from system I to systemII and from system II to system I are inverses of each other.

5-o
SEC. 6 COORDINATE SYSTEMS, LINEAR TRANSFORMATIONS 157
Exercises
1 0 1
1. Letco=,0 c1=(1),c2=I1). What are the coordinates, with respect0 0/ 0
xo 0to this choice of vertices and unit point, of the point (xi )? Let po= (1),
0 01
11p1= 0), p2= 0).What are the matrices connecting the coordinates of a
point in these two systems?2. Given the vertices and unit point P,., P0l, P,.+Ol of a coordinate system
on 1, show that one can take a coordinate system Pc0, Pcl, Pte, Pcg in the planeso that the coordinates of a point P,, on l relative to Pc, Pcl, P00+01 are thefirst two of the three coordinates of P. relative to P4, P., P", Peg.
6. Linear transformations on a line and from one line to another.Just as in the plane, the matrix multiplication applied to coordinates
on on a line may be regarded in the alias or alibi sense. In the former
case we have a change of coordinates, of names ; in the latter, a changeof place, a transformation, and such transformation is called linear.
Let 1, 1' be two lines and fix coordinate systems on each. (l may beequal to l' but the coordinate systems may even then be distinct.)
Let A= raoo ao11 be a 2 x 2 matrix having an inverse, and consider``alo all/the transformation from l to l' defined by the rule
\xc/ - \xo,/ = A \xo/
Such a transformation is called linear, a linear transformation froml to 1'. It has an inverse, and the inverse is also linear.
Exercises
1. Show that coordinate systems on l and l' may be taken so that a givenlinear transformation takes the form xo = x0, xl' = x1.
2. Every linear transformation from l to 1' is induced by a linear transfor-mation of the plane.
THEOREM. Every perspectivity and every projectivity from one line toanother (or the same) line is a linear transformation.
PROOF. Let a be the center of a perspectivity from l to 1'. Letxo, xi, xo + x1 be the vertices and unit point of a given coordinate systemon 1. Then the line joining a and xo meets l' in a point pa+axo. Since
Fr'
158 LECTURES IN PROJECTIVE GEOMETRY CHAP 8
u :A 0, one may divide by a and take as representative for this point atriple of the form coa+xo. Similarly we may say that a joined to ximeets l' in cia + xi. Now take any third point Axo + µx1 on 1. Wheredoes it meet l' ? Clearly A(coa + xo) + µ(cia + xi) is on I'; but since thistriple equals (Aco+µci)a+(Axo+µxi), it represents a point on the joinofato Axo+µxi. Thus the sought point isA(coa+xo)+µ(cia+xi). If wetake coa+xo, cia + xi, and their sum (coa+xo)+(cia+xi) as the verticesand unit point of a coordinate system on 1', the coordinates of that point
in this system are A, µ. Thus if ('k) are the coordinates of a point in
the first system, and (A,'1 coordinates in the second, the transforma-
tion is given by A' = A, u'= µ, or in matrix notation
\01
/(A
which proves that a perspectivity is a linear transformation. If we nowpass from l' to l" by a perspectivity, we may suppose the equations ofthis transformation are given by
1 A,
(µ") = (0 1)
where\) are coordinates on l". Thus, for an appropriate coordinate
system on 1", the product of the two transformations is given by
J1" = A, µ" = µ, or") = `0
1)\µ ("') '
therefore the transformation is linear. In this way, we see that anyprojectivity is linear. In fact, if the projectivity is from l to 1, then byan appropriate choice of a coordinate system on 1, the multiplying
matrix is simply (0 1). But note, further, that whatever the coordi-
nate system on 1, the transformation from l to l is given by a matrixmultiplication, since a shift of coordinates on 1 merely involves multi-plication by a 2 x 2 matrix ; a product of 2 x 2 matrices is a 2 x 2 matrix.
Exercise. In 3-space, every projectivity from one plane to another (oritself) is a linear transformation.
Converse to the last theorem, we have the following.
THEOREM. Every linear transformation between two lines of a planeis a projectivity.
pp'
BC
Do-
".+
0.,
SEC. 7 COORDINATE SYSTEMS, LINEAR TRANSFORMATIONS 159
FROOa. Let A, B, C be three points of the first line, A', B', C' thepoints on the second line into which they are sent. The main point isthat there is only one linear transformation taking A, B, C, respectively,into A', B', C': since there is a projectivity which takes A, B, C intoA', B', C', and the projectivity is linear, this will prove that everylinear transformation is a projectivity. To see that there is only onelinear transformation taking A, B, C into A', B', C', let us take A, B, Cas vertices and unit point of a coordinate system on first line ; andsimilarly with A', B', C' for the second line. Then we are looking for
the 2 x\2 matrices that will take (), (), (1), respectively, iinto
l/ (i I (i) The matrices taking() (1), ``respectively, into (01)
lol are of the form (0 Q) ; and if in /addition I it goes into (i)' we
`must have p=a. Thus the desired matrices are of the form (00P)
All of these represent the same linear transformation. This completesthe proof.
We shall resume the present topic in higher-dimensional space afterthe next section.
REMARx. Even in the case of a noncommutative field K, a linear
transformation sending (10), \01, \11 into themselves is given by a
matrix of the form (0 P), but a matrix of this form need not give the
identity transformation.
7. Cross-ratio. Let Pa, Pb, P., Pd be four collinear points in PNK's.Write c = as + µb, d = pa + ab. For the present we define the cross-ratio R(Pa, Pb; P., Pd) to be (µ/A)/(a/p), leaving aside for the momentwhether this agrees with our previous definition.
The first point to be observed is that the cross-ratio (though definedin terms of representatives) does not depend on the representativeschosen. Thus, if we take aa, Pb,1'c, Sd as representatives of Pa, Pb, P.,Pd, and write
ye = (yA/a)aa+(yµffl)(b), Sd = (Sp/a)aa+(Sa/P)(fb),we find
[(y4f)/(ya/a)]/[(Sa/IB)/(SP/a)] _ (N-la)/(a/P)The next thing to observe is that cross-ratio is invariant under a
(nonsingular) linear transformation. If the transformation is effectedby the matrix A, then Pa, Pb, Pa, Pd go over into PAa, PAb, PAC, PAd,
H,,
°A.,
"t,
...r.
.0'
g!`+
e
.'v...
m`'
...m
1,
e°,
coo
"''
'°'`'
ear
Is'
rob
moo
°O°0
c'"c
"``O
r
C",
mss
coo
1,57C)
0
aye
0.'
0.,
w'0
160 LECTURES IN PROJECTIVE GEOMETRY CHAP 8
and since Ac = AAa +,uAb, Ad = pAa + aAb, we see that the cross-ratioof the second four points is the same as the cross-ratio of the first fourpoints.
Another way. of expressing the content of the last paragraph is to saythat cross-ratio is independent of the coordinate system. Actually,in the next chapter we shall define coordinate system abstractly andshall we that the coordinate systems of this chapter form a proper sub-set of all coordinate systems. However, the coordinate systems of-thischapter are sufficient for many purposes, and cross-ratio is invariantunder shift of coordinate system in the sense of the present chapter.
Exercise. Show that the cross-ratio, as defined above, agrees (whenapplicable) with our previous definition (in terms of distances).
8. Coordinate systems and linear transformations in higher-dimen-sional spaces. The facts considered above for planes have easygeneralizations to PNK". First, a coordinate system is determined byn + 2 points, any n + 1 of which are independent. Let Pyo, Pi, ... ,Pyn, P. be such points and choose representatives for them such thatg = y° + + yn: If y= Aoy°+ + Anyn, then Ao, ., An are called thecoordinates of Pe with respect to the coordinate system havingPyo, ... , Pe, as vertices and Pg as unit point. Passage from one coordi-nate system to another is given by matrix multiplication. Making theusual distinction between alibi and alias transformations, the alibitransformations effected by nonsingular matrix multiplication definelinear transformations. As in the plane, there is one and only one lineartransformation taking the vertices and unit point of one coordinatesystem respectively into those of another.
Let Sm be an m-dimensional subspace of PNK". Let Pyo, , P,- bem + 1 independent points of Sm and let an (m + 2)-th point Pa, of Sm bechosen. Let representatives of Pro, ... , Pe., be chosen so that g'=y° + + ym. The points P,o, . , P. P. are said to be the verticesand unit point of a coordinate system of Sm (immersed in PNKn).If Py is a point of Sm and y = Aoy° + + Amy-, then Ao, -, A. are thecoordinates of P , relative to the coordinate system P,o, . , PP'", Pe,.If Sm is another (or the same) m-dimensional subspace of PNK" andP r ,--- , Pyo, P1, is a coordinate system of Sm, then the formula
a=(Ao,..., A.)-+AX -X=(Ao,..., Am), i.e.,
PA,$o+... Pao;°+... y'",
where A is a nonsingular (m + 1) x (m + 1)-matrix, defines a lineartransformation from Sin onto Sm. There is one and only one lineartransformation taking the vertices of a given coordinate system of S-respectively into the vertices of a given coordinate system of Sm.
SEC. 8 COORDINATE SYSTEMS, LINEAR TRANSFORMATIONS 161
Exercises
1. The coordinates in Sm relative to P7o, , Py, Ps, are the first m+ 1coordinates in Sn relative to some coordinate system.
2. Let P, Q, R, S be four collinear points in Sm. The cross-ratioR(P, Q ; R, S) is defined relative to Sm and to Ss (= PNK%). Show that thedefinitions coincide.
Let Sm, Sm be two m-dimensional spaces in PNKn and let Sn-m-1 bea space skew to both of them. By the formula dim L+dim M=dim [L, M]+dim (L n M), one sees that the join of Sin and Sn-m-1 is
the whole space; this is also true for the join of Sm and Sn-m-1 Nowlet y be a point of Sm. The join of y and Sn-m-1 is an Sn-m ; and theformula just referred to shows that the intersection of Sn-m with 3m isa single point y. The transformation y --> y is called a perspectivity fromSm to Sm with axis Sn-m-1. A prajectivity is by definition a product ofperspectivities.
TREOREM. A perspectivity is a (nonsingular) linear transformation.
r'nooF. Sn-m-1 is the intersection of n - (n -- m -1) = m,+ 1 hyper-planes. Let these have the equations
u°x = 0, umx = 0,
where uix = 0 abbreviates uoixo + uiix1 + - + u.'xn = O. Let x1, - ,
xn-m be a basis of Sn-m-1. Then y, x1,. xn-m forma basis of the joinof y and Sn-m-1 and hence
y = by+A1x1+ ...Moreover we may suppose A =1 (A # 0, since y is not in Sn-m-1). Sincex1, , xn-m are in Sn-m-1, taking the inner product of both sides of thelast equality successively by u°, - - , um, we find
u°y = u°y = flomy = u'y = Al
u" =umy=RmHaving chosen a coordinate system in Sm, let yo, , ym be the coordi-nates of y = (yo, - , y, ). Then the yi are certain linear combinationsof the y y and hence the fi are linear combinations of the yJ :
A = Sioyo+ +8imym.
By a similar argument we findp/+i = EttYO+ . . +Eimym,
where (y0, , y'm) are the coordinates of y with respect to some coordi-nate system in Sm. In matrix notation, we have 3 = (8)y and (i = (e)y,

9.v'
tit
;21
162 LECTURES IN PROJECTIVE GEOMETRY CEnr 8
where (8) and (e) are (m + 1) x (m + 1) matrices. Moreover the columnsof (8) are linearly independent; for, if there were a nontrivial set ofvalues yo, , ym such that (8)y = 0, then we would find that uoy =0,. . ., umy=0, i.e., that y lies in Sn-m-1, which is not so. Hence they's can be solved for in terms of the p's : y = (8-1)(i. Similarly (e 1)(3.We have y = (S-1E)y and Y = (E 18)y. From our discussion on determi-nants (extended to n x n matrices) one sees that 8-1E is nonsingular.Hence y and y are connected by a nonsingular linear transformation.Q.E.D.
COROLLARY. A projectivity between Sm and Sm' is a (nonsingular)linear transformation.
Let Pyo, , Pym, Pg and Py , , Py, Pa be the vertices of coordinatesystems in Sm, Sm, respectively, m<n. We leave it as an exercise toshow that there is a projectivity sending Pyo -- Pyo, , Pg - Pg. Thistransformation is linear, and since there is only one linear transforma-tion sending Pyo -- Py , , Pg -j Pg, we see that every linear transfor-mation between an Sm and an Sm, m < n, is a projectivity. Thus :
THEOREM. The notions of linear transformation and projectivity froman Sm to an Sm, m < n, coincide.
REMARK. To see what a linear transformation of Ss onto itself is insynthetic terms, embed the Sn in an Sn+1.
9. Coordinates in affine space. By definition, an affine n-space arisesfrom a projective n-space by deletion of a hyperplane. For sim-plicity, let us restrict ourselves to projective spaces isomorphic to aPNKn with K commutative. By appropriate choice of a coordinatesystem, the deleted hyperplane can be made to have xo = 0 as equation.Thus every point (xo, , xn) in the affine space is such that xo 0.
The numbers L". ,xn
are called the nonhomogeneous coordinates ofX0 xo
the point. Three points P : (yl, , yn), P': (yl', , yn'), P":(yl", , yn") are collinear if and only if
(1, y1,..., yn), (1, y1',..., yn'), (1, y1",..., y,n")
are linearly dependent ; in the case P 0 P', if and only if, for some A, µ,
(1, y1",..., yn") = A(1, y1,..., yn)+P(yl',..., yn').
Thus P, P', P" are collinear if and only if either P = P or
(yl",..., yn") = A(yl,..., YO +p.(yl',..., yn')
with A+µ=1.
FB
I
y},
i.'
SEC. 9 COORDINATE SYSTEMS, LINEAR TRANSFORMATIONS 163
DEFnvmox. By ANKn we mean the set of ordered n-tuples(yl, , yn) with yi, , yn in K together with the specification thatP: (yi,..., yn), P': (yi',..., yn'), P": (yi",..., y.') are collinear ifP=P' or
(yi",..., yn") yn)+µ(yi ,.. , yn')
with A+µ=1.The previous paragraph can be summed by saying that every affine
n-space (at least the ones to which we are restricting ourselves) is iso-morphic to an ANKn. Moreover, going over the steps of that para-graph in slightly different order, one sees that ANKn is an affine spacefor every K. In short, the concept of an affine space coincides with thatof an ANKn.
By a linear transformation of an affine space we mean a transformationinduced by a linear transformation in the associated projective spacethat leaves the deleted hyperplane invariant. Let
xO = aooxo+ .. +aonxn, , xn' = anoxo+ +annxn
be equations of a linear transformation in PNKn. If xo = 0 is invariant,the point (0, 1, 0, , 0) goes into a point on xo = 0; since it goes into(aol, a l l , " ,* , ani), we conclude that ao1= 0; similarly that ao2 = =aon = 0. Then aoo # 0, since det (a{g) . 0. The transformation effectedby matrix A is the same as that determined by pA, p # 0; hence we maysuppose aoo = 1. In terms of the nonhomogeneous coordinates, thelinear transformation is given by the formulas :
yi = alo+ailyi+ +ainynY2' = a2o+a21y1+ +a2nyn
yn = ano+anlyi+ +annyn,
withall ... a in
lani ... ann1
A vector space of dimension n is the notion made up of an affinen-space together with the specification of one of its points O. It isconvenient, and possible, to take coordinates so that 0 = (0, , 0) : wesuppose this done. By a linear transformation of the vector space wemean a linear transformation of the associated affine space which leavesO fixed : in the above formulas, then, aio = = ano = 0. Thus thelinear transformations of a vector space are given ' by : y' = Ay, where Ais a nonsingular n x n matrix. Alongside these linear transformationsone considers coordinate system changes of the form y'=Ay.

164 LECTURES IN PROJECTIVE GEOMETRY CHAP. 8
Exercise. Let A be an n-dimensional vector space. A projective(n -1)-space S can be defined as follows. The points of S are the lines of Athrough O ; and the lines of S are the planes of A through O. Show that thelinear transformations of A induce linear transformations of S.

...w
.+
car
'L3
"t1
-.a
c09
417
...41
7
'M'
ear
:-'
ran
4Z+
BC
D.`
+
R.'
CHAPTER IX
COORDINATE SYSTEMS ABSTRACTLYCONSIDERED
1. Definition of coordinate system. So far we have consideredcoordinate systems only in the analytic model, in the projective modelbuilt up from a given commutative field K :t we will refer to such amodel as a PNK (= projective number-plane over the field K). Herethe points are by definition triples of numbers, or rather classes of such,and the numbers are then referred to as coordinates ; in addition tothese absolute coordinates, we have also explained how to specify thepoints in other ways, by the relative coordinates. Each of these waysof assigning numbers to points so that the points can be specified bymeans of the numbers we can call a coordinate system.
Now we want to consider the matter somewhat more abstractly, i.e.,directly in terms of a given projective plane Tr (defined by means of theaxioms of alignment, Desargues' and Pappus' Theorems). There areno coordinates given at the start; these will have to be introduced.First a definition :
DEFINITION. By a coordinate system of a plane it one means an iso-morphic mapping of IT onto some PNK, i.e., an assignment, one toone, of the points P of 7r to the points P' of PNK and of the lines lof TT to the lines l' of PNK in such a way that if Pis assigned to P and
xo1' to 1, then P on l implies P' on l'. If P' is the point xl , then P is
xsxo
said to have coordinates xl in the coordinate system in question.x2
t The assumption that K is commutative is made solely in order to simplify initialstudy.The results of the section, as well as the proofs-aside from slight modifications-also holdfor noncommutative K.
165
tap
166 LECTURES IN PROJECTIVE GEOMETRY CHAP 9
Exercise. If the conditions of the definition are met, then P not on Zimplies P' not on 1'. (Recall that by saying onto, we mean that each pointP' of PNK and each line l' of PNK arise from a point of it and a line of ir.)
The definition can be made vivid by imagining the given plane aspread out in front of one, like a blank sheet of paper (see Fig. 9.1);the PNK is pictured as a sheet of graph paper, with the points (and lines)marked with numbers. The graph paper is placed on top of the blanksheet (or, rather, the blank sheet is placed under the graph paper).A point P of a is then specified by the point P' of the graph paper which
1. PNK
FIG. 9.1
lies over P. By moving the graph sheet around, one gets differentcoordinate systems.
Earlier we showed how, on the basis of the axioms, one can introducecoordinates into the projective plane Tr. Our work there can be phrasedas in the following theorem.
THEOREM. Every projective plane has at least one coordinate system.
The problem we set ourselves is this : What are all the coordinatesystems of a given projective plane Tr?
Let (91 be a coordinate system of Tr; the definition of %1 involves afield K1. Let (I2 be another coordinate system of ir, with associatedfield K2. There is nothing in the definition of coordinate system thatstates we must have K1= K2 or Kl isomorphic to K2.
THEOREM. Let q1, (2 be coordinate systems of a relative to fields K1, K2.Then K1 and K2 are isomorphic.
1 0 0 1
PROOF. Let E0('), E1(1), E2(1), E3(1) be the points 0 , f1 0 1
0 0 1 (1)of the plane PNK1; here the entries 0, 1 are from K1. Let E0(2), E1(2),
1 0 0 1
E2(2), E3(2) be the points 0 1 0 1 of the plane PNK2 ; here0 0 1 1
the entries 0, 1 are from K2. Let F0, Fl, F2i F3 be the points of Tr whichmap under (1 into Eo(1), El(l), E2(1), E3( ), respectively. It is notnecessarily the case that under (92 the points F0, F1, F2, F3 go intoEom2m, E1(2), E2(2), E3(2), respectively; but we will show why we may
O"`
C
.n.
e0+
°o1
p"".
...l=
1
S3.
(OD
f1'
CO
Dr+
.
'11
per,
c0+
"C1
F"1
'S1
0.P
E-+
cart
Pi's
`p"
boo.can
r.'
«'f
(1)
SEc. 1 COORDINATE SYSTEMS ABSTRACTLY CONSIDERED 167
assume they do. Let, in fact, (92 send Fo, F1, F2, F3 into Go, G1, G2, Gs.Since (92 is an isomorphism, no three of the points Go, G1, G2i G3 arecollinear. Hence there is a linear transformation LA (given by matrixA) that sends Go, G1, G2, G3, respectively, into Eo(2), E1(2), E2(2), E3(2).One checks that 2LA (=the mapping l2 followed by LA) is also anisomorphic mapping of Tr onto PNK2. Replacing (s2 by the coordinatesystem (f2'=%2LA, we may suppose (writing (2 for (92') that (92 sendsFo, F1, F2, F3, respectively, into E0(2), E1(2), E2(2), E3(2).
The transformation (91-lq2 maps PNK1 onto PNK2 and sendsE0(1), E1(1), E2(1), E3(1) into Eo(2), E1(2), E2(2), E3(2) (Fig. 9.2). Since(91-1(92 sends Eo(1) into Eo(2) and E1(1) into E1(2), it sends every point
E (v0
PNK1
qi1_0.
1
F0
7
FIG. 9.2
(2)
0
PNK2
(1, x, 0) on line Ec(1)E1(1) into a point on Eo(2)E1(2), i.e., into a point(1, x', 0). In this way we get a mapping a:x-*x' of the field K1 ontoK2. We claim : a is an isomorphism. Proof : consider the construc-tion by straight lines that leads from the points (1, x, 0), (1, y, 0) to thepoint (1, x+y, 0); see p. 77. Let (91-1(92 send these points, respec-tively, into (1, x', 0), (1, y', 0), (1, u', 0). Then the configuration thatconnects (1, x+y, 0) to (1, x, 0) and (1, y, 0) is mapped by q1_'(92 into aconfiguration that connects (1, u', 0) to (1, x', 0), (1, y', 0) in a similarway ; this shows that u'= x' + y', or what comes to the same thing(x + y)a = xa + ya. Similarly one proves (xy)(a) = x(a) y(a). Thus a isan isomorphism, and maps K1 isomorphically onto K2. Q.E.D.
Let l be a given coordinate system of -rr, say, into PNK. Then theabove theorem tells us in effect that in looking for all the coordinatesystems of it we may as well restrict ourselves to the one field K andthe corresponding PNK. We can simply neglect the fields isomorphicto K, since whatever we can say for K we can say for the isomorphicfields, and vice versa. On the other hand, we cannot neglect the iso-morphisms of K onto itself, the so-called automorphisms of K.
Exercise. Let K be the field of complex numbers. Each number in Kcan be written in one and only one way in the form a+ bi, where a, b are realand i is a specified square root of -1. Show that the mapping a + bi -* a - biis an automorphism of K. (The number a-bi is called the complex conju-gate of a+bi.)
"..
(.j
pea
KK
K
0l1
l91°..+
0.1F+
"
pipim
p
Imo
168 LECTURES IN PROJECTIVE GEOMETRY CHAP. 9
Starting with the given (9, let W be another coordinate system intoPNK. Then %-1(9' is an isomorphic mapping T of PNK onto itself.Since (9' = (Z we would know all coordinate systems of 77 if we knew allisomorphisms of PNK onto itself, i.e., all automorphisms of PNK.
Let a be a given automorphism of the field K. We define a mappingxo
of PNK as follows. Let xl be coordinates of a point. Then wex2
xo
send this point into xi: , where for notational purposes we have writ-x2a
ten the effect on a number x by a as xa. Note that xoa, xla, x2a are notall = 0, since not all of x0, xl, x2 are = 0, and an isomorphism sends only0 into 0. Thus xoa, x1-, x2a are the coordinates of some point. Note
x0 .1x0
also that if we take other coordinates of f xl , say .1x1 , then the proX2 .1 x2
Aaxoa
cess described yields Aax1- , i.e., the same point : so we really have a(A'X2'')
mapping of the points of PNK into points of PNK. One verifies thatthis is a univalent, onto mapping. Similarly we map the line (co, c1, e2)into the line (coa, ce, c2a).
x0This mapping preserves incidence : i.e., if xl is on (CO, e1, c2), then
(X2)XOI
xl- , the image of the point, is on (co-, cla, 02a), the image of the line.x2a
To see this we have to see that cox0 + c 1x1 + c2x2 = 0 implies coaxoa +claxla+c2-x2a=0. Applying a to both sides of the equation cox0+C1x1 +C2x2 = 0, we get
(Coxo + clxl + c2x2)a = 0a,
hence (coxo)a + (01x1)a + (c2x2)a = 0a, since an automorphism maps sumsinto sums; and coaxoa+claxla+c2-xf=0, since an automorphism mapsproducts into products and 0 into 0.
Thus an automorphism a of K gives rise to an automorphism ofPNK. We designate this automorphism P. Moreover we can recovera from Pa, because if Pa sends (x, 1, 0) into (x', 1, 0), then clearly x' = xa.Another way of stating this is that distinct automorphisms al, a2 of Kyield distinct automorphisms Pal, 111%2 of PNK.
yI-
loo
'm,
v..
m5'
°C.
wpm
pro
cue
ti.°.
3
p,,
'a.
b`+
0.,
!0I00o
Ssc. 1 COORDINATE SYSTEMS ABSTRACTLY CONSIDERED 169
The automorphism Pa leaves the points Eo, El, E2, ES invariant.Now we prove the converse.
THEOREM. If an automorphism T of PNK leaves the points Eo, E1,E2, Es invariant, then T is of the form Pa for some automorphism a ofthe field K.
PROOF. Since T sends Eo into Eo and El into El, it sends any point(1, x, 0) of E0E1 into a point (1, x', 0) of E0E1. The argument abovethat showed that any two coordinate systems of a plane 9r must berelative to isomorphic fields here shows that the mapping x x' is anautomorphism. Call this automorphism a, and consider the auto-morphism Pa of PNK. Then clearly T and Pa coincide on E0E1, i.e.,have the same effects on the points of E0E1. One also sees that T andPa coincide on the lines E1E2, E2Eo. Since any line l cuts the sides ofthe triangle E0E1E2 in at least two points, say C and D, the auto-morphisms T and Pa have the same effect on l : if T and Pa send C, Dinto C', D', then they must both send 1 into C'D'. Let now P be anypoint. On P take two lines m, n. If T and Pa take m, n into m', n',they must both take P into m' n'. Thus T and Pa have the sameeffect on all points and all lines, and hence T = Pa. Q.E.D.
THEOREM. Every automorphism of PNK is of the form LAPa, WhereLA is the linear transformation of matrix A. and a is an automorphi8mof K.
PROOF. Let T be the given automorphism of PNK and let T-1 sendE0, El, E2, E3 into Go, G1i G2, G3, so that T sends Go, G1, Gz, Gs intoEo, E1, K2, Es. There also exists a linear transformation, LA, takingGo, G1i G2, G$ into Eo, El, Es, E8. Hence, LA 1T sends Eo, El, E2,E3 into Eo, El, K2, Es. By the last theorem, then, there exists anautomorphism a such that LA-'T=P-, whence T = LAPa. Q.E.D.
Exercise. Using the fact that the inverse of an automorphism is also anautomorphism, show that every automorphism of PNK is also of theform PsLB.
The following theorem is a corollary of the last one, and answers thequestion we set ourselves above.
THEOREM. Let (1 be a given coordinate system of a, tl; : r - PNK.Then every coordinate system of 9r is (except for isomorphisms of K) ofthe form (EL AP-, where LA is a linear transformation of PNK and a isan automorphism of K.
DEFINITION. Transformations of the form LAPa are called semi-linear transformations.
yon
car
try`ti
00.2
170 LECTURES IN PROJECTIVE GEOMETRY CA"p 9
THEOREM. Every semilinear transformation of PNK is an auto-morphism of PNK and, conversely, every automorphism is a semilineartransformation.
FROOF. The first part is immediately verified. For the second,consider the identity coordinate system of PNK, i.e., the one which
xo xoassigns to xl the coordinates Xj J. Any automorphism of PNK is
x2 xg
an isomorphism of PNK onto itself, i.e., it is a coordinate system, henceby the last theorem is of the form: identity x LAP*. Q.E.D.
2. Definition of a geometric object. Given a projective plane IT,(plane) projective geometry is, of course, the study of the plane or andespecially of the configurations in 7r. In studying 7r, however, we some-times introduce a coordinate system, and the study becomes analytical.As long as the objects one is dealing with come directly from 7r, there isno question that these objects are of interest in a projective study. Buthaving initiated an analytical study, one sometimes defines thingsanalytically ; for example, we defined a linear transformation as a trans-formation given in a PNK by matrix multiplication. Since any plane7r can be viewed as a PNK, it would appear that linear transformationsare of projective interest. Actually, however, "linear transformation"as thus defined is rather a property of or and a particular coordinatesystem than of a itself. To see that "linear transformation" is reallyof projective interest, we should see that a transformation given bymatrix multiplication in one coordinate system is also given by matrixmultiplication in any other. If that turns out to be so, then a lineartransformation will be a property of Tr itself, and not of-7r and somespecial coordinate system. (We shall in a moment prove this to be so ;meanwhile, we are making general remarks of an orientating character.)Thus we can say :
Analytic projective geometry is the study in PNK of properties that,though perhap8 expressed in terms of a coordinate system, are independentof the coordinate system in which they are expressed.
Another way of stating the same thing is this :
Analytic projective geometry is the study in PNK of properties ofanalytic expressions that are invariant under a change of coordinatesystem.
Or still another way is :
Analytic projective geometry is the study in PNK of invariants of the8emilinear transformations.
PV
C
gym
yin
p:+
F',
e°+
yam
Ssc. 2 COORDINATE SYSTEMS ABSTRACTLY CONSIDERED 171
As an illustration, consider the line 1 whose equation in a givencoordinate system is xo= 0. Usually a linear equation has three terms.Does the fact that the equation for l has only one term have any projec-tive significance? No, since in other coordinate systems the equationof l may well have three terms. The fact that xo = 0 has only one termis a property of l relative to a certain coordinate system.
As another example, let us consider cross-ratio. In 9r take fourcollinear points P1, P2, Pa, P4. Take a coordinate system in suchthat these points lie on X2=0 and let P1 have coordinates (1, xi, 0).
Define B(P1, P2; Pa, P4) in the expected way as X3-X1 X3-X2. Thex4-x x4-x2question is : Does this concept have projective significance? Is itinvariant under all automorphisms of 70 The answer depends on thefield K of or. Suppose K is the complex number field and
B(Pi, P2; Pa, P4) = i.
By an automorphism of a, the points P1 can be sent into points P1' suchthat B(P1', P2'; P$', P4') = - i. Hence, R(P1, P2 ; Pa, P4) is notinvariant under all semilinear transformations (though it is invariantunder the linear transformations). For the real field, it does turn outthat the cross-ratio is invariant under all semilinear transformations,as we shall see. (In fact, we shall also see that for the real field, anysemilinear transformation is linear.)
On the other hand, let us take the property that R(Pj, P2 ; Pa, P4) _-1. Since -1-- -1 under an automorphism, one finds that for anyautomorphism of ir, which sends P1 into P1', B(P1', P2' ; Pa', P4')Thus the property of four points expressed by saying
R(Pi, P2 ; Pa, P4) _ -1is definitely of projective interest.
Let us now check the assertion that if a transformation T of -,r is givenin one coordinate system by matrix multiplication, namely, T : x -* y = Bx,then it i8 given similarly in any other coordinate system.
xoPROOF. Let (s = LAPa be a coordinate system. If xl are the old
(X2xo
coordinates, the new coordinates X1 are given by x' = (Ax)a. Simi-x$
larly, the new coordinates of y are y'= (Ay)a. From x' = (Ax)a, we find(x')--"=Ax and x=A-1(x')a-'. Similarly y=A-1(y')a-'. Hence,A-1(y')a-' = BA-1(x')a-', so (y')a-1= ABA-'(x')a-' and y' = (ABA-1)ax'.
...o
...co
o
172 LECTURES IN PROJECTIVE GEOMETRY CHAP. 9
In other words, in the new coordinate system T is also given by amatrix multiplication, namely, T : x' -* y' = (ABA-1)'x'. Q.E.D.
We sometimes express the fact just proved by saying that a lineartransformation is a geometric olject.
3. Algebraic curves. As another example, we will define the notionof an algebraic curve in the plane IT. Here the field K is definitelyassumed to be commutative. First we give a preliminary definition.
DEFINITION. By a power product in three letters %o, %1, X2 onemeans an expression of the form Xo'oXj iX2{9, where io, i1, i2 arenonnegative integers ; a monomial is an expression of the formc%o'o$1{1X2{9, where the coefficient c is an element of a given field; apolynomial is a sum of monomials, therefore an expression of theform :Ecto;1sXoioX1{1%2{9. The degree of cXo'oXI'1X'2 is defined asio + it + i2; thus every monomial except 0 has one and only one degree ;0 shall be assigned every nonnegative integer as a degree. Combiningthe monomials that are multiples of the same power-product, everypolynomial (# 0) can be written uniquely as a linear combination ofdistinct- power products with coefficients different from zero; andwhen this is done, the monomials involved are called the terms of thepolynomial. The degree of a polynomial (# 0) is the maximum ofthe degrees of its terms ; the subdegree is the minimum. A poly-nomial (0 0) is called homogeneous if all of its terms are of the samedegree, or in other words, if the degree of the polynomial equals itssubdegree ; also 0 is called homogeneous.
We will not verify the following theorem.
THEOREM. The product of two polynomials different from zero (thecoefficients being in a given field), is different from zero; and the degreeof the product is the sum of the degrees of the factors ; likewise for thesubdegrees-whence it follows that if a homo eneou8 polynomial is fac-tored into two polynomials, the factors must also be homogeneous.
By a polynomial equation one means the condition on numbersxo, x1, x2 that they annihilate a given polynomial F(%o, XI, %2), i.e.,that F(xo, x1, x2) = 0. The equation is usually written :
F(%o, X1, 12) = 0(which, of course, does not mean that F(%o, XI, %2) is the polynomial 0).
DEF]Nmow. Let or be a plane and (9: IT -a PNK, a coordinate sys-xo
tem. By an algebraic curve one means the set of points x1 ,(X2)

912
ear
ova
Cr. .N
-
SEC. 3 COORDINATE SYSTEMS ABSTRACTLY CONSIDERED 173
x{ in K, that satisfy a polynomial equation F(Xo, X1, X2) = 0, where Fis a homogeneous polynomial different from zero with coefficients in K.
The homogeneity condition is put in in order to assure us that ifF(xo, xl, x2) = 0, then also F(Axo, Axl, Axe) = 0; in other words, theequation is a condition on points and not merely on triples.
The first question is whether an algebraic curve is a geometric object,or, more explicitly stated, whether an algebraic curve is given by ahomogeneous polynomial equation in every coordinate system.
Let the change of coordinates be given by the semilinear transforma-tion LAP', so that if x is the old and x' the new coordinates of a point,then x' = (Ax)'. It is convenient to break up this change into twochanges: first from x to Ax; and then to (Ax)'. Thus we considerchanges of the form x' = Ax and of the form x' = x-; and this simplifiesmatters notationally a little.
Let F(X0, Xl, X2) _ lci*ot,f2Xof0X1hX212 and let F = 0 be the givenequation. We have x'=Ax; whence also x = Bx', B=A-I. Or inexpanded notation :
xo = booxo'+bo1xi +bo2x2'xl = b,oxo'+b11x1'+b12x2'X2 = b2oxo'+b2lxl'+b22x2'.
Clearly lciot,s2xo{oxl{1x2{2 = 0 if and only if
lctor,t2(booxo'+bolxl'+bo2xti )so(bloxo'+bllxl'+bl2x2'){1(b2oxo'+b21xi +b22x2')'2 = 0,
i.e., if and only if z0', x1', x2' satisfy the polynomial condition
lctoi1t2(booXo' + ...)t°(bloXo' + ...)"(b201o' + ... )t2 ='O;
and this is a homogeneous polynomial condition. Note that we canrecover the polynomial F(Xo, Xl, X2) from the polynomial
F'(X o', Xl', X2') _ lctot1i2(booXo' + ...)to(bloXo' + ...)t1(b20Xo' + ... )r2
by replacing Xo', X1', X2' by
aooXo+ao,X,+ao2X2, alolo+a11X1+a12X2, a2oXo+a21X1+a22X2,
respectively; hence F'(Xo , Xl', X2') is not the polynomial zero, as thiswould imply that F(Xo, X1, X2) is zero.
(If we look at x' = Ax not as a coordinate change but as a lineartransformation, then the given curve goes over into the curve given bythe equation F'(Xo, Xl, X2) = 0-)
.-0
CA
D
(D1
"CD
...
cam174 LECTURES IN PROJECTIVE GEOMETRY CHAP. 9
We have still to consider transformations of the form x'=x,. Herewe see that
1cfOf,tzx0;0x1"X2ta = 0
if and only if
Gc 0 1E x0 {Oxl'{1x2 {2 = 0;
or in other words, if and only if xo', xl', x2' satisfy the polynomialcondition
C°`{0;1E2X0{oX 1 0.
In this way we see that an algebraic curve is a geometric object. Onecould also put the matter thus :
T uOREM. Under a semilinear transformation, an algebraic curvegoes into an algebraic curve.
REMARK. In studying a problem analytically, the object of makinga coordinate change is to simplify the analytical situation. It may beconvenient, then, to consider a proper subset of all coordinate changes,rather than all of them. For example, we may consider all coordinatechanges of the form x' = Bx : this has the advantage that we need notthen take into account the automorphisms of the base field. This setof coordinate changes is often sufficient, so much so that projectivegeometry has been defined in terms of this set of coordinate changesrather than in terms of'the full set. For convenience of exposition wewill also adopt this point of view in later chapters : in other words, wewill not bother with the automorphisms of the base field.
4. A short cut to PNK. A system of type E satisfying certainaxioms is a PNK-the axioms have been so selected that we come outwith a PNK. The reason for the choice is that one knows that a PNKis an interesting object of study. Buf if what we want to study is aPNK, why not say so to start with, and thus make a short cut to thedesired object of study? One objection is that a certain coordinatesystem is selected as absolute, and this is undesirable. To get aroundthis difficulty, we can define a projective plane to be a system of type Ethat is isomorphic to some PNK. Then we define coordinate system, asabove, as an isomorphic mapping of the plane into some PNK. In thisway one comes immediately to the main object of study, the PNK,without being saddled with an absolute coordinate system.
5. A result for the field of real numbers. Having made the assump-tion that Desargues' Theorem holds, we know that the study of projec-
1.4
`°y
G:'
'L3
...
`+'
...
'°G
G.'
fin'
Fr"
egoR
.,
E-1
...
..i
r..,^
ago
Pr,...
3,Q
SEO. 5 COORDINATE SYSTEMS ABSTRACTLY CONSIDERED 175
tive geometry comes to the study of space over a field K. One cantherefore abandon, if one wishes, axioms of a synthetic type and insteadmake assumptions on the field K. Thus, instead of assuming thatPappus' Theorem holds, we may equivalently assume that K is com-mutative. The intuitive geometric notion of order on a line can bemade explicit by means of synthetic axioms and corresponds to the ideathat the field K is a so-called ordered field; further notions, of a geo-metric sort, lead to the study of space over the real field. A short outto this stage of study is simply to assume that the field K is the realfield. The main line of development of projective geometry, especiallyits continuation into so-called algebraic geometry, does not give to thereal field any dominating role ; but because of the general significanceof the real field for mathematics, the study of this particular case-though aside from the main line-is undoubtedly significant. In thisregard, we prove a result promised above, namely the following.
THEOREM. The real field has no automorphiems but the identity.
PROOF. We first observe that in any automorphism 0 - 0. Thereason is that 0 may be characterized as the unique solution of theequation a + x = a (for any a). Applying the automorphism r : u -- u' toboth sides of this equality, we get a' + x'= a', whence the image x' of xis seen to be zero. In a similar way one proves that 1--. 1. Then1 + 1- 1 + 1, 1+1+1-->1+1+1, etc. ; therefore all the positiveintegers, as well as zero, are fixed under r. From a + x = 0 one getsa' + x'= 0, whence the image of -a is minus the image of a ; hence alsothe negative integers, hence all integers, are fixed under T.
Next we show that r sends any rational number m/n, where m, n areintegers, into itself. Write m/n = x. Then m = nx. Apply r to getm = n . x', whence x' = m/n. Thus -r keeps the rational numbers fixed.
Next we prove that r sends every positive number x into a positivenumber. In fact, if x > 0, then x is a square, x = a2. Hence, r(x) =x'=a'2, where a' =r(a). Since x' is a square, it must also be positiveor zero. It could not be zero, since r is univalent (one to one) and sends0 -. 0 and therefore does not send any x different from zero into zero.Thus x'> 0.
Finally we prove r : x ---> x for every x. In fact, let r : x -+ x' andsuppose x' x. Let m/n be a rational number between x and x'. Thenwe have x < m/n < x' or x' < m/n < x. We treat the first case, the secondbeing similar. From x < m/n, we get m/n - x > 0, whence applying r,m/n - x' > 0, so m/n > x'. This contradicts the assumption m/n < x'.Hence the assumption x' :Ax is untenable, i.e., r : x --a- x, every x. Thisproves that r is the identity automorphism and completes the proof.
,l;
176 LECTURES IN PROJECTIVE GEOMETRY eff". 9
COROLLARY. The only collineations (or automorphiems) of PNK2, forK the field of real numbers, are the linear transformations.
REMARH. A similar theorem for the complex field is false : there areinfinitely many_automorphisms of the complex field. In fact, there areinfinitely many complex numbers satisfying no nontrivial polynomialrelation over the rationale, and if xi and x2 are two such quantities,then there is an automorphism of the complex field sending xi into X2.
loo
°°0C
+
-...
ors
r..
m(y
D
1111111-r'
V."
..,
.a,
^y'
O0.,
c,.,...
CHAPTER X
CONIC SECTIONS ANALYTICALLY TREATED
1. Derivation of equation of conic. Our object now is to studyconies analytically, at least to the extent that we studied them syn-thetically. That is, we have already studied conies directly in terms ofthe primitive notions of point, line, and incidence ; whereas now we willtake advantage of the fact that our plane IT has a coordinate system :the study shall now be in terms of the coordinates of points and of lines.
We start from the definition of the conic as the locus of the inter-section of corresponding rays in a projectivity that is not a perspectivity.Let L, L' be two distinct points, a a projectivity from the pencil of lineson L to the pencil of lines on L'; and a not a perspectivity. If l is anyline on L, then l and (l)a meet in just one point, 1.1(a); recall thatd = l(a) is impossible, as l = (l )a would mean that LL' goes into L'L undera, and this would imply that a is a perspectivity. The conic wasdefined as the locus of l l(a) as l varies through the pencil at L. Nota-tion: P=P(L, L'; a).
Since our object is to study conies analytically, we should retain aslittle as possible from our synthetic study. Actually we will keep onlythe following : a line through L meets P(L, L'; a) in at most one pointdifferent from L ; and similarly for L'; in particular, no point of LL'except Land L' are on the conic ; and Land L' are on the conic. Thesefacts follow directly from the definition.
Our first object is to get an algebraic condition (or conditions) on thecoordinates of a point P. that will be necessary and sufficient for thepoint to lie on the conic.
Let P = P(L, L'; a). We first study r in an especially convenientcoordinate system, later in an arbitrary coordinate system. Thecoordinate system we have in mind will have L, L' as vertices. LetDo, D1, D2, D be the vertices of a coordinate system with D1= L,D2=L'. Let P. be a point on P ; and let us first restrict ourselves topoints not on LL' (Fig. 10.1). Let D2P meet DoD1 in A; D1P meetDoD2 in A'. Since A - AD2 is a perspectivity (from the range on
177
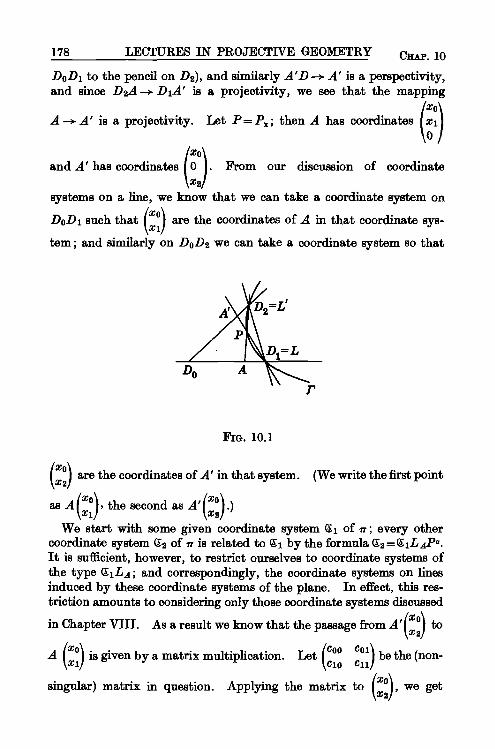
2,m
178 LECTURES IN PROJECTIVE GEOMETRY CH". 10
D°D1 to the pencil on D2), and similarly A'D -* A' is a perspectivity,and since D2A -* D1A' is a projectivity, we see that the mapping
fx°A -* A' is a projectivity. Let P= Px ; then A has coordinates xl
0x°
and A' has coordinates 0 . From our discussion of coordinatex2
systems on a line, we know that we can take a coordinate system on
D°D1 such that (X0) are the coordinates of A in that coordinate sys-
tem; and similarly on D°D2 we can take a coordinate system so that
FIG. 10.1
(°) are the coordinates of A' in that system. (We write the first point
/as A 1 0'I , the second as A' I x°2). )
We start with some given coordinate system (91 of ir; every othercoordinate system f2 of Tr is related to L11. by the formula l2=O1LAP".
It is sufficient, however, to restrict ourselves to coordinate systems ofthe type (f1LA; and correspondingly, the coordinate systems on linesinduced by these coordinate systems of the plane. In effect, this res-triction amounts to considering only those coordinate systems discussed
in Chapter VIII. As a result we know that the passage from 0) to
A I xi p is given by a matrix multiplication. Let ('01) be theC11
singular) matrix in question. Applying the matrix to x2 we getI f ,
S3+
11.
cad
E"{
a.4..7
SEc. 1 CONIC SECTIONS ANALYTICALLY TREATED 179
cooxo+colx2, cooxo+611x2 as coordinates of A(x0). This does not
mean that xo=cooxo+6°1x2, x1=c10xo+cl1x2, but\only that
pxo = cooxo+colx2px1 = 610x0+611x2
for some p # 0 ; here p may depend on the point P.. (In fact, thoughthis point need not enter the considerations, the number p definitelyvaries with Px ; it could not be constant, for if it were, all the points ofthe conic (not on LL') would lie on the line pxo = cooxo +co1x2i and thisis not so.) Since we are considering first the points for which xo 76 0,we can write :
x1 _ 610x0+611x2x° cooxo+C°lx2
xi(cooxo+601x2) _ xo(c1oxo+611x2).
Thus every point of the conic not on LL' satisfies the condition (2) ;the restriction to points not on LL' may now be removed, since one
0 0sees that 0 and 1 satisfy the condition.
1 0Conversely, let x satisfy (2) : to see that P, lies on the conic. First
consider the points for which xo # 0. We have to see that A'
A(x°J are corresponding points under u; this amounts to establishing
equation (1); and we have (2). We can divide (2) through by xo, sincexo 0 ; but we wish also to divide by cooxo +co1x2, and must see that thisnumber is not zero. That is so, because if it were zero, we would alsohave xo(cloxo+cllx2)=0, and since x0 0, cllxo+611x2=0. Thus wewould have
cooxo+colx2 = 0cooxo+cl1x2 = 0,
and since coocul-clocol#0, the only solution of these equations isxo = 0, x1= 0 ; this is a contradiction, since xo 0 0. Hence we can divideboth sides of (2) by xo(cooxo+colx2) and get (1). This shows that P,lies on the conic, at least if xo 0. It remains to consider the pointssatisfying (2) for which xo = 0. Here we note that col # 0 ; in fact, if
col = 0, then the transformation from DOL to DOL' defined by (coo coil\clo cull
]it-
'Q
''
.,,1-
1ti,
''d
ti,
cue
.yam
P'+
yet
...G
EC
°3.
""s
(fl
C,,
tip
.rol
lR
.."s
'p°
°m
...
''.
uce
..,
180 LECTURES IN PROJECTIVE GEOMETRY CHAP. 10
would send L =A (1linto A'(0) = L', whence a would send LL' into
L'L, making a atperspectivity;
and this is not so. Hence in (2), ifxo = 0, we find x1= 0 or x2 = 0. There is only one point for whichxo = 0, x1= 0, and this is L'; similarly, xo = 0, x2 = 0 corresponds to L.Thus every point satisfying (2) lies on the given conic.
Summing up the considerations so far, we have the following theorem.
THEOREM. Every conic is given in an appropriate coordinate systemby an equation of the form x1(e0ox0 +coixo)-xo(e1ox2+c11x2)=0, with(coocll - 0 0.
In a previous chapter we saw that if a locus is given in one coordinatesystem by an equation of the form F(xo, X1, x2) = 0, where F(xo, X1, X2)is a homogeneous polynomial of degree n, then it is given in any othercoordinate system by an equation G(xo, x1i x2) = 0, where 0 is a homo-geneous polynomial of degree n. Thus in any coordinate system a conicis given by an equation of the form G(xo, x1i x2) = 0, where G is a homo-geneous polynomial of degree 2. Moreover if the conic is given byG = 0, with G homogeneous of degree 2, then G cannot be properlyfactored (i.e., into several factors at least two of which involve the xi) ;a priori G could only factor into two homogeneous linear forms (andfactors not involving the x{). The easiest way to see that this cannotactually happen is to observe that if it did, the conic would consist ofthe points on one or two lines, in fact of one or two lines on the pointsL and L' (these would be the lines whose equations would be given bysetting the factors equal to zero) ; this would imply that some linethrough L or L' meets the conic in at least three points, whereas a linethrough L meets the conic in at most one point different from L ; andsimilarly for L'. Thus we have the following theorem :
THEOREM. Every conic is given in every coordinate system by anequation Q(xo, x1, x2) = 0, where Q is a homogeneous irreducible poly-nomial of degree 2. (Moreover the locus Q(xo, X1, x2) = 0 has in it at leasttwo points, since, in fact, the locus is the conic and a conic always hason it at least two points.)
Let us consider the converse question, whether a locus given by anirreducible homogeneous equation of degree 2 is a conic. The answerto this depends on the field K ; it is yes if K is the complex field, but noif K is the real field. Thus over the real field consider the locus givenby the irreducible equation xo2 + x12 + X22 = 0; if real numbers xo, xl, x2satisfy this condition, then xo = x1= x2 = 0, so there are no points on thislocus, and hence it could not be a conic, which from the definition alwayscontains at least two points. Another instructive example is the locus

Sec. 1 CONIC SECTIONS ANALYTICALLY TREATED 181
given by the equation xo2 + x12 = 0; over the real field, this equation isirreducible ; and it has on it just the one point xo = 0, x1= 0, x$ =1.Clearly, in order that a locus Q = 0 be a conic it is necessary that it con-tain at least two points. With this extra condition we get the converseof the last theorem. Thus :
THEOREM. Let Q(xo, xi, x2) be a homogeneous polynomial of degree 2with coefficients in a field K and let Q be irreducible over K (i.e., whenthe proposed factors have their coefficients restricted to K). If the locusQ = 0 has in it at least two points, then the locus is a conic.
moor. Our locus is given by Q = 0 in some definite coordinatesystem. If we pass to a new coordinate system, the equation Q = 0transforms into an equation Q' = 0, where Q' is homogeneous of degree 2.Moreover Q' is also irreducible, for if it factored, then returning to theold coordinates the factors of Q' would transform into factors of Q. Ofcourse the locus of Q' = 0 has in it at least two points, for this locus is justthe locus Q = 0 we started with. Thus we may change our coordinatesystem at will, without losing our hypotheses.
Let L, L' be two points of our locus and let us take them as twopoints Dl, D2 of a coordinate system. Every homogeneous equationof degree 2 is of the form :
aooxo2+aoixoxi+ao2xox2+aiixi2+a12x1x2+a22x22 = 0,
and in particular our locus is given by such an equation. Since the0
locus passes through Di = (1), we see that a11= 0 ; and similarly,0
using D2, that a22=0. The equation can then be written :
xi(aoixo + a12x2) - xo(- aooxo - ao2x2) = 0,
or, what is the same,
(3) xi(cooxo+coix2) -xo(cioxo+ciix2) = 0,
where aol=coo, ai2=co1, -aoo=cio, -ao2=cii. Compare this withequation (2) in the argument leading to the first theorem above. Here
we also have 1c'Ocoil # 0, as otherwise there exists a A 0 0 such thatco ell
cio = Acoo, cii = Aco1 (or coo = Acio, coi = Hell) ; in either case one wouldsee that the left-hand side of (3) has a linear factor, and this is not so.Also cot # 0, as otherwise xo would be a factor of the left-hand side of (3).
Since IColo colt 0 0, there is a projectivity A -* A' from DOD, to DoD2
W°'
...
Iii
Z41
.'3
`.Y
!11;
iC
D.
chi
bp'
,°7
G.,
F"v
Pip
P°;
caw
001
182 LECTURES IN PROJECTIVE GEOMETRY CHAP. 10
defined b the matrix (CIOoo coily cool ,
and correspondingly, a projectivity
a : D1A' --p- D2A from the pencil at L to the pencil at L'. From the factthat co, 0, one sees that in the former projectivity, D1 and D2 do notcorrespond, so that under a, D1D2 and D2D1 do not correspond, so ais not a perspectivity. Now consider the conic U(L, L'; a). Its equa-tion as deduced before is (2), which is the same as (3). Hence (3) is thelocus of a conic, which was to be proved.
A definition is merely the starting point of a logical argument, and assuch is somewhat arbitrary. For example, a set of points that is aconic can be characterized in several ways ; and any one of these wayscan equally well be taken as the definition. The intention is to cometo a certain body of theorems, and the particular way of fixing thedefinition depends on how one proposes to come into possession of thetheorems. Our definition of conic is a convenient one for a synthetictreatment ; but if our considerations are to be analytic, it is convenientto start from a purely analytic definition. Thus in the case of a conic,we could have defined it as a locus containing at least two points whichis given by an irreducible homogeneous equation of degree 2, and itwould have been convenient to do so. Moreover, having decided on adefinition, it is not necessary, within a given logical development, tocompare it with other definitions ; the reason for comparison is to showthat two different logical developments amount to the same thing.Previously we did this for two definitions of the conic. Subsequentlywe are going to give new (analytical) definitions for terms already en-countered, for example, polar. Having, say, defined polar, we do nothave to compare this with our previous definition, but as the intentionis that we are talking about the same thing previously called polar, theargument is developed at least to the point where the identity can beseen.
2. Uniqueness of the equation. Let a conic I' be given by thehomogeneous equation F(x) = 0 of degree 2 in a given coordinate sys-tem & Of course, the conic is also given by cF(x) = 0, where c is anynumber different from zero. Since definitions will frequently be givenin terms of an equation F(x) = 0, it is important to know whether thereare perhaps several equations for P. Actually, we shall show, ifG(x) = 0 is also a homogeneous equation of degree 2 for r (in the givencoordinate system (9), then G(x) = cF(x) for some c 54 0. We express thisfact by saying that the equation of r is "essentially unique," where theword "essentially" refers to the fact that an arbitrary factor c 0 0 canbe introduced into the equation. Also we frequently leave out theword "essentially," supposing it then to be understood.

BC
D
.`Y
Lm
.
r-1
QT
Y
SEC. 3 CONIC SECTIONS ANALYTICALLY TREATED 183
Let, then, F(x) = 0, G(x) = 0 be equations for P in the coordinatesystem (9. Let Do, D1, D2 be three noncollinear points on P. From %go over by a matrix multiplication to a coordinate system %1 havingDo, D1, D2 as vertices. Under x--->-x'=Ax, F(x) goes over intoF(A-lx') = Fi(x') and G(x) goes over into Gl(x'). If we can show thatG1(x')=cFl(x'), it will follow that G(x)=cF(x).
As explained above, in (1 we find
.Fl(x') = C2xo'xl'+cox1'x2'+clx2'x0', COC1e200Gl(x') = d2xo'xl'+doxl'x2'+dlx2'xo', dodld2 0 0.
Hence we find that all points of P satisfy d1F1(x') -c1G1(x') = 0; butd1F1(x')-c1G1(x')=xl'[dl(c2xo'+cox2')-cl(d2xo'+dox2')], so that (ifd1F1 c1G1) all the points of r would lie on two lines. Suppose for amoment that on r there are at least 5 points ; since no 3 are collinear,the 5 points could not distribute themselves on two lines, and the proofin this case is complete.
Can a conic contain less than 5 points? From the definition, we seethat there is a one-to-one correspondence between the lines on L and thepoints on P(L, L'; a). Thus there are as many points on r as there arelines on a point, or points on a line. This leaves the theorem to beverified in the projective planes with 7 and 13 points, respectively; orwhat is the same thing, in PNK2'for K the two element field and K thethree element field, respectively. For the two element field, there isa priori only one possibility for Fl(x'), namely, xoxl'+xl'x2'+x2'xo';and similarly for Gl(x'), so Gl(x') = Fi(x'). For the three element field,extra considerations are necessary, and we leave this remaining case asan exercise.
3. Projective equivalence of conies. Let r= P(L, L'; a) be a conic.Let l be a line on L such that 10 LL', (l)a L'L ; then l (l)a is a pointof r not collinear with L, L'. Take three noncollinear points on P(say L, L', l (l)a) and make them the vertices Do, D1, D2 of a coordinatesystem. In this system r' has the equation
aooxo2+aolxoxl+ao2xox2+a11x12+a12xlx2+a22x22 = 0;
but since Do lies on the conic, one finds aoo 12 = 0. Similarly becauseD1, D2 are on the conic, one finds a11= 0, a22=0. Therefore the equa-tion appears as :
aolxoxl+ao2xox2+al2xlx2 = 0.
Here aol 54 0, as otherwise, x2 would be a factor of the left-hand side.Similarly a0200 and a1200. Now consider a change of coordinatesgiven by
xo = a12xo', xl = a02xl', x2 = aolx2'.
via
mm
's
184 LECTURES IN PROJECTIVE GEOMETRY Cser. 10
Then in the new coordinate system, the conic is given by
xo'xi +x0'x2'+x1'x2' = 0
If we refer only-to this last coordinate system, there is no point, nota-tionally, in keeping the primes ; and one has the following theorem :
THEOREM. Every conic r has, in an appropriate coordinate system,the equation : xoxl + xox2 + x1x2 = 0.
Let now Pi, P2 be two conies. Fix a coordinate system, with sayEo, E1, E2, E as vertices and unit point. Previously we took threepoints Do, D1, D2 on Pas vertices of a new coordinate system. We canregard this process as a linear transformation taking Do, D1, D2,respectively, into E0, E1, E2. Thus we can say that by a linear trans-formation one can send the conic Pl into the conic XOX 1 + x lx2 + x2x0 = 0.Similarly, by a linear transformation we can send P2 into XOX 1 + X1X2 +x2xo = 0. The first of these transformations times the inverse of thesecond is a linear transformation taking 171 into P2. Hence we have :
T xonxzr. Any conic can be sent into any other by a linear transfor-mation.
Exercise. In the preceding theorem one can make the transformationtake any three assigned points of the first conic into any three assignedpoints of the second; and this can be done in only one way.
4. Poles and polars. Let F(x) be a homogeneous polynomial ofdegree 2 in the letters xo, xl, x2. Then F(u + x) is a homogeneous poly-nomial of degree 2 in the six letters xo, xi, x2, u0i u1, u2. Each term ofF(u+x) has two u's as factors, or two x's as factors, or one u and one x.Placing x=0, we see that F(u) is the sum of the terms in F(u+x) whichare of degree 2 in uo, ul, u2; and similarly, by placing u = 0, that F(x) isthe sum of the terms of degree 2 in the x's. Thus G(u, x) = F(u + x) -F(u)-F(x) is the sum of the terms in F(u + x) which are of degree 1in the u's and of degree 1 in the x's; and hence G(u, x) is homogeneousof degree 1 in the u's and homogeneous of degree 1 in the x's. Let ube the coordinates of a point and let x be variable ; then G(u, x) is alinear form in x0, x1, x2.
DEFINITION. If the coefficients of G(u, x) are not all zero thenG(u, x) = 0 is a line, called the polar of the point P. with respect toF(x). If F(x) = 0 is a conic or one or two straight lines, we will alsosay that the polar is with respect to the locus F(x) = 0.
To see that this definition is any good, or in other words, whether thepolar is a geometric object, we have to consider a change of coordinates,compute the polar in the new system, and see that we get the same line.
-1i
IIIm,0,
°..4
1.21
SFc. 4 CONIC SECTIONS ANALYTICALLY TREATED 185
Consider a change of coordinates given by the formula x = A x'.Then F(x) goes over into the form F(Ax') = F'(x') ; and F(u + x) goesover into F(Au'+Ax')=F(A(u'+x'))=F'(u'+x'); whence G(u, x)goes over into F'(u'+ x') - F'(u') - F'(x'). Call this G'(u', x'). ThenG'(u', x') = G(u, x). In particular, one sees that G'(u', x'), regarded as alinear form in xo , xi , x2', does not have all its coefficients zero, as other-wise G(u', x') would vanish for every point x', and hence G(u, x) wouldvanish for every point x. The locus G(u', x') = 0 is the polar as com-puted in the new coordinates ; and since G(u', x') = G(u, x), this is thesame as the locus G(u, x) = 0, which is what was to be seen.
Exercise. Consider also a coordinate system change of the form x -* xa,where a is an automorphism of K.
TnxoRx i. If F(x)=0 is the locus of a conic, then every point has apolar with respect to the locus F(x) = 0 (unless 1 + 1= 0, in which casethis is not so).
PROOF. We take a coordinate system in such way that F(x) _xoxl+xix2+x2xo. Computing F(u + x) - F(u) - F(x), we find
G(u, x) = (obi+u2)xo+(u2+uo)xi+(uo+ui)x2.
The question now is whether there is any point u such that the coeffi-cients ui+u2, u2+uo, uo+ul are allzero. We know that
ul+u2 = 0uo + n2=0uo+ui = 0
have a nontrivial solution if and only if = 0. Computing
the determinant, we find its value to be 2. Thus if 1 + 10 0, everypoint has a polar with respect to every conic.
If 1 + 1= 0, then the point (1, 1, 1) does not have a polar with respectto the above conic. Thus the case in which 1 + 1= 0 in K forms anexception and will be excluded from. our further considerations onconies. Recall that in the synthetic treatment we also made thisrestriction.
For computational purposes we seek a good expression for G(u, x).Recall that in calculus one defines derivatives in such way that it turnsout that the derivative of xn is nxn-i. There the definition depends onlimit concepts, but if here we define the derivative of the polynomialaxn+bxn-i+cxn-2+..., where a, b, c... are in K, to be naxn-'+(n - 1)bxn-2 + (n - 2 )cxn-3 + , then one finds that the familiar rules
old
186 LECTURES IN PROJECTIVE GEOMETRY CHAP. 10
of computation obtain, in particular, (f (x)g(x))' = f'(x)g(x) +g'(x) f (x)and (f(x)+g(x))'=f'(x)+g'(x), where' stands for derivative. One alsoproves that f(x + h) =f(x) +f'(x)h + terms of degree ?2 in h; this is aspecial case of Taylor's theorem-we will need the result only for poly-nomials of degree <- 2, where the result is easily checked directly. Inthe case of a polynomial f in several variables, say f = f (xo, x1, x2) onefinds similarly that
aOff ul+v u2f(xo+uo, xl+ul, x2+u2) _ f(xo, x1, x2)+Ox uo+
0 l 2
+terms of degree > 2 in uo, ul, u2.
Here If means the derivative of f(xo, x1, x2) relative to the letter xoOX0
(i.e., we think of f(xo, xl, x2) as a polynomial in the one letter xo, andtake the derivative as explained). We can also write
-Lff(xo+uo, xl+ul, x2+u2) = f(u0, ul, u2)+ 0 xo+au xl+ -Lf X2OU2
+terms of degree >_ 2 in xo, x1, x2.
Here f means the derivative of f(uo, ul, u2) relative to the letter uo;fto
sometimes we like to think of uo, u1, u2 as fixed and in that case could
describe Of as the result of substituting uo for xo, ul for x1, u2 for x2 in
of8xo
The assertions above will only be needed for f (xo, xl, x2) of degree
< 2 in xo, xl, x2 and can be verified easily by a direct computation.Let now F(xo, xl, x2) be homogeneous of degree 2:
F(xo, x1, x2) = aoox02+aoixox1+a02xox2+a11x12+a12x1x2+a22x22.
Since G(x, u) = F(x + u) - F(x) - F(u) is the sum of the linear terms in xof F(x + u), we find :
G(x, u) =OF
xo+ -ul xl+_FU 2
x2.
HereOF
2aoouo + aolul + a02u28uo
OF8u1
OF
aoluo + gal lul + a12u2
ao2uo + a12u1 + 2a22u2.
ris
T.'
s~,
Size. 4 CONIC SECTIONS ANALYTICALLY TREATED 187
Applying the criterion for the linear equationso
= 0, l = 0,aF
= 0
to have a nontrivial solution, we get the following theorem.
THEOREM. A necessary and sufficient condition for the locus F = 0 tohave a polar with respect to every point u is that
2aoo aol a02
aol tall a12
ao2 ail 2a22
00.
The following is a corollary of the last two theorems.
COROLLARY. If F(x) is irreducible, homogeneous, and of degree 2, andthe locus of F = 0 contains at least two points, then A 0.
Note that we can write
8F eF 2F 2aoo
= (uo, n1, u2) aolau0 aul 8n2)
a02
aol ao2
tall a12 = uTA,a12 2a22
where uT stands for the row matrix (uo, ul, u2), and A stands for thematrix exhibited. The matrix A is symmetric, i.e., the entry in the ithrow and jth column is the same as that in the jth row and ith column.Letting AT designate the matrix obtained from an arbitrarily givenmatrix by interchange of rows and columns-first row of A becomingfirst column of AT, second row of A becoming second column of AT,etc.-the symmetry of A can be expressed by saying A=AT.
Exercise. Show that (AB)T = BTAT.
We can write : G(x, u) = uTAx. Replacing u by x, we see thatG(x, x) =xTAx ; moreover, G(x, x) = F(2x) - F(x) - F(x) = 4F(x) -2F(x) = 2F(x). Thus :
or
where
2F(x) = xTAxF(x) = xTBx,
aoo aol/2 a02/2B = JA = aol/2 all a12/2 .
a02/2 al2/2 a22-
Thus we see that any homogeneous polynomial F(x) can be written
°a+
0bu
m
.._.
,''0
188 LECTURES IN PROJECTIVE GEOMETRY CH", 10
in the form xTCx in at least one way. Actually this can be done inseveral ways. Expanding
coo col cos xo
(xo, x1, x2) 010 Cii 012 xl , we getego Cal 022 x2
xTCx = coox02+(eol+clo)xoxl+(co2+020)xox2 +011x12+(C1 2 + c21)X1X2 +022x22,
and comparing this with
F(x) = aooxo2+aolxoxl+ao2xox2+allx12+al2xix2+a22x22,
we see that xTCx=F(x) if and only if coo=aoo, col+clo=aol, c02+020=ao2, 011=a11, c1a+021=a12, c22=a22. There are several ways to pickthe c{p so that these conditions obtain, but we restore uniqueness byrequiring C to be symmetric, and then C = B.
Recalling that we are excluding the case that 1 + 1 = 0, we cansummarize the above computations as follows :
THEOREM. Every homogeneous polynomial F(x) of degree 2 can bewritten in the form xTAx, with AT=A, in one and only one way; thepolar of P. with respect to F(x) is (if it exists) uTAx=0.
Exercise. If the polar of P lies on Q, then the polar of Q lies on P.
THEOREM. Every point P. has a polar with respect to xTAx if andonly if det A 0 0. (In this statement, as in other similar ones, wetacitly assume A to be symmetric.)
PROOF. The polar, if it exists, is given by uTAx = 0; and it exists ifand only if uTA 0 0. To say uTA # 0 for every u (960) comes to sayingthat the rows of A are linearly independent, and this is so if and only ifdet A # 0.
COROLLARY. If the locus of xTAx = 0 is a conic, then det A # 0.
The corollary follows from the theorem and a previous theorem tothe effect that every point has a polar with respect to every conic. Onecan see this point anew as follows. Making a coordinate changex=Bx', the form xTAx goes over into x'TBTABx', so that the matrixof the form xTAx in the new system is BTAB : note that BTAB issymmetric, as (BTAB)T=product of transposes in reverse order=BTATBTT = BTAB. The determinant of the matrix does, in general,change with a change of coordinate system, in fact, det BTAB=(det B)2 det A ; but whether the determinant is zero or not does notchange. Since any two conies are projectively equivalent, the corollarywill hold in general if it holds for some conic. It is thus sufficient tocheck the corollary for some conic, say xoxl + xlxa + x2xo = 0.
Cs'
...
3.m
:..
$'o
Sue. 4 CONIC SECTIONS ANALYTICALLY TREATED 189
Exercises
1. Using the idea of the last paragraph, show that if xTAx=O is one or twolines, then det A=O.
2. If xTAx=O consists of two distinct lines, then rank A'(=number oflinear independent columns of A)=2; if xTAx=O consists of just one line,then rank A = 1.
3. Two points are called conjugate with respect to a conic if each is on thepolar of the other. Show that if two pairs of opposite vertices of a completequadrilateral are conjugate with respect to a conic r, then so are the remain-ing pair of vertices.
Over the real field one can separate the irreducible polynomialsxTAx into three categories : (i) those for which the locus xTAx = 0 has atleast two points, hence is a conic, (ii) those for which the locus xTAx=0has no points, (iii) those for which the locus xTAx = 0 has just one point.Over the complex field the division into cases disappears, since thereare always plenty of points satisfying xTAx = 0, as we see from thefollowing theorem.
THEOREM. Over the complex field, every locus xTAx = 0 has a pointon every line. In fact, if F(x) is any homogeneous polynomial, thenevery line meets the locus F(x) = 0.
PROOF. Let l be a given line, and take a coordinate system in which lhas the equation xo = 0. In effect, then, the theorem has only to beproved for the line xo = 0.
Let xTAx=aooxo2+aolxoxl+aoaxoxa+allxl$+alaxlxs+a28x22. Weseek the intersection of x0=0 with xTAx = 0. Placing x0=0 in xTAx,we have to see for which values of x1, xa we have allxla +a12x1x2 +a22x22=0. If a22=0, then x1=0, xa=1 is a solution. If ass 0 0, notefirst that in no solution can we have xl = 0, for then a22x22=0 andx2 = 0; this gives (0, 0, 0) as a "solution," which does not count, however,since it does not represent a point. Since any solution (0, xl, x2) needonly be determined within a factor, we seek for (0, 1, x2/,xl). The con-dition on x2/X1 is obtained from al1x12+a12xlx2+a22x22=0 by dividingthis equation by x12. This yields the equation all+ala(xa/xi)+a22(x2/x1)2 = 0. Over the reals, such an equation need not have asolution, but over the complexes there always exists at least one solu-tion. Thus every line meets the locus xTAx = 0. A similar argumentholds for any homogeneous F(x).
CoRoiannY. On every locus F(x) = 0 there are, over the complex field,infinitely many points.
PROOF. Let P I . --- , P. be any finite number of points on F(x)=O;we show that there is at least one more point on F(x) = 0. In the com-plex projective plane there are infinitely many points on a line, hence
...
II`s
ue
.:.'d
+co
o
...
lam
,
coo
cue
f7.
.D'
VA
N
'o'°,..
R.,
Cod
190 LECTURES IN PROJECTIVE GEOMETRY CHAP. 10
infinitely many lines on every point. Let A be a point different fromthe Pi ; and let 1 be a line through A different from the lines APE.Let l meet F(x) = 0 in a point Q. Then Q cannot be one of the points PE,say P1, as otherwise l would be the line AP1, which is not so.
THEOREM. Over the complex field, the polynomial xTAx (assumed 00)is either reducible, in which case det A = 0 and xTAx = 0 represents oneor two dines ; or it is irreducible, in which case det A 0 and xTAxrepresents a conic.
This is a corollary to the previous theorem, since over the complexesa locus xTAx = 0 cannot be empty or even contain a sole point.
Exercises
1. Let A be a symmetric matrix with real entries. If the locus xTAx = 0has only one point (over the reals), then over the complex field xTAx=Oconsists of two distinct lines. On the other hand, if xTAx=O is empty (overthe reels), then over the complex field xTAx=0 is a conic.
2. Let A be a symmetric matrix with entries from a field K. Consider theform xTAx. Show that rank A is a geometric object. For K the complexfield, give a synthetic interpretation of the rank.
We are now going to verify that the previous definition of polar andthe present one coincide. The verification is straightforward. Thereare two cases : (i) the point a is not on the conic xTAx = 0, (ii) the pointa is on the conic. We will consider case (i), leaving (ii) as an exercise.
Let u be a point on xTAx=0 and let us ask where the line joininga and u meets the conic : analytically we ask for the values of d suchthat Aa+uis onthe conic, i.e., (AaT+uT)A(Aa+u)=0. SinceuTAu=O,this comes to solving AS(aTAa)+2AuTAa=0. One root of this equa-tion is d= 0, which corresponds to the fact that u is on the conic. Theother root is d= - 2uTAa/aTAa, and one concludes that for this value ofA, the point .1a + u is on the conic.
Now we compute the fourth harmonic µa+u of a with respect to uand Aa + u. We require then, that R(a, µa + u ; u, .1a + u) _ -1, or,what is the same thing, R(a, u ; µa + u, .1a + u) = 2. This gives(1/1L)I (1/A) = 2, or u = A/2.
We now have to verify that (-uTAa/aTAa)a+u lies on the polar ofa; i.e., that aTA{[-uTAa/aTAa]a+u}=0. This is immediate andcompletes the verification.
5. Polarities and conics. We recall that a projective collineation ofPNK is an automorphism of the plane that induces a projectivity onthe ranges of corresponding lines. Every automorphism is of the

cell-
F'1
coo
'C?
SEC. 5 CONIC SECTIONS ANALYTICALLY TREATED 191
form LAP-, where LA is a linear transformation and P- is an auto-morphism of PNK induced by an automorphism a of K. Since pro-jectivities preserve cross-ratio, so do projective collineations. Letx, y, Ax +µy, px+ay be four collinear points, of cross-ratio (1i/,1)/(a/p).Then LAP- sends them into four collinear points of cross-ratio[(µ/.1)/(a/p)]-. Hence if LAP- is a projective collineation, we musthave a=1. Conversely, the linear transformations are projectivecollineations.
Bringing in the lines on a level with the points, we have seen that alinear transformation, or what is the same thing, a projective collinea-tion, has equations of the form
x-*x' = Axu - u' = uA-1.
Hence a correlation has equations of the form
X -* u' = (Ax)T = xTATu-*x' = (uA-1)T = (A-1)TuT = (AT)-1UT.
For the correlation to be a polarity, the line xTAT, into which x goes,itself must go into x : in other words, (A T)-1(XTAT)T = px, for some p.This yields (A T)-IAx= px. Placing x successively equal to (1, 0, 0),
P(0, 1, 0), (0, 0, 1) one sees that (AT)-1A= P J. Thus we get A
pAT. Applying T to both sides, we get AT = pA; and from this andA=pAT we get A = p2A. Since A is nonsingular, it has a non-zeroentry, from which we conclude that p2 = 1, hence p = + 1 or -1. Thevalue p = -1 is excluded, for if p = -1, we get that AT = - A ; and,since A is 3 x 3, that det AT = (-1)3 det A ; whence det A = det AT =- det A and det A = 0. This is a contradiction, since A is nonsingular.Thus, in every polarity, A= AT. Conversely, every correlation withA = AT is a polarity. To sum up :
THEOREM. The polarities are the correlation
x->- u' = xTAu- x' = A-1AT
with A= AT.
Thus every polarity is associated with a nonsingular symmetricmatrix A. It is also true that every conic is associated with a non-singular symmetric matrix A : namely, the conic xTAx = 0 is associatedwith the matrix A. Through A, the conic is associated with a polarity-the matrix pA gives the same polarity. Moreover we see that the
+-'
oar
...
.ti
..p
+
192 LECTURES IN PROJECTIVE GEOMETRY Cuup. 10
polarity associated with the conic xTAx = 0 sends each point into itspole with respect to the conic and each line into its polar.
The question now is whether every polarity (of matrix A) arises inthis way from a conic. This amounts to asking whether the locusxTAx = 0 is a conic. The answer is : not necessarily so. Thus for
1
A=( 1 ), the transformation x ->x T, u-+ u T is a polarity, but,1
over the real field, the locus xTx = O, i.e., x02 +x12 +x22 = 0 is empty,since the only numbers for which x02+xl2+x22=0 are xo=xi=x2=0,and (0, 0, 0) is not a point. We can prove, however, that if xTAx = 0is not empty, then it is a conic. Of course, if xTAx = 0 has two points(at least), then we know it is a conic (since det A :A 0, xTAx is irredu-cible). Thus we have to show that if xTAx=O is not empty, then itcontains at least two points.
First a lemma.
LEMMA. By a change of coordinates, any quadratic form
aooxo2 + 2aoixoxl + 2ao2xox2 + ailxi2 + 2al2xix2 +a22x22
can be brought to the form axo'2+bxl'2+0x2'2.
PROOF. If all the ail are zero, then the quadratic is already in thedesired form. Assume, then, that some all 0. If aoo, aii, a22 are notall zero, one of them, aoo say, is not zero : if aoo, all, a22 are all zero,then aoi, ao2, ail are not all zero, say aoi 0 0; in this case we make thesubstitution xo = xo' + x i', x1= xo' - xl', X2=X2' and in the resultingform find the coefficient of xo'2 to be different from zero. Thus we maysuppose aoo 0 0. The quadr//atic may now be written as
aoo(xo+aooxi, 2+2aO2X04aoo01aoo2)x12
ao2aoi+2 alt-aoo
)xlx2+a22x22,
and making the substitution xo+a°i xl=xo , xl=Xi , x2=x2', one findsaoo
in the resulting expression that the coefficient of xo'xi is zero and thecoefficient of X012 is not zero. Thus we may assume the quadraticalready to be in the form
aooxo2 + 2ao2xox2 + allxi2 + 2al2xix2 +a22x22
with aoo 0 0. By a second application of the above argument, we may
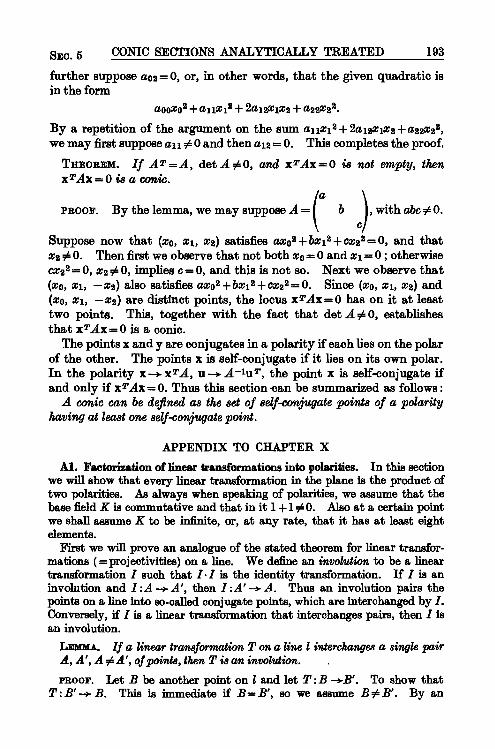
acs
v'!
ear
...
'.3ch
i
?I1
Ill
w.. C+
0
8100. 5 CONIC SECTIONS ANALYTICALLY TREATED 193
further suppose aoa = 0, or, in other words, that the given quadratic isin the form
aooxo2 +a11x12 + 2aiaxlxa + a22x22.
By a repetition of the argument on the sum aiix12+2a12xix2+a22x22,we may first suppose all # 0 and then ale = 0. This completes the proof.
THEOREM. If AT = A, det A 96 0, and x TAx = 0 is not empty, thenxTAx = 0 is a conc.
PROOF. By the lemma, we may suppose A = b J, with abc 0 0.C
Suppose now that (Xo, X1, X2) satisfies ax02+bxi2+ex22=0, and thatX200. Then first we observe that not both x0=0 and x1=0; otherwisecx22=0, x2 # 0, implies c = 0, and this is not so. Next we observe that(Xe, Xj, -X2) also satisfies axo2+bxi2+cx22=0. Since (Xo, X1, X2) and(Xe, X1, - X2) are distinct points, the locus x TAx = 0 has on it at leasttwo points. This, together with the fact that det A :A 0, establishesthat x TAX = 0 is a conic.
The points x and y are conjugates in a polarity if each lies on the polarof the other. The points x is self-conjugate if it lies on its own polar.In the polarity x __> X TA, u --> A-1u T, the point x is self-conjugate ifand only if xTAx = 0. Thus this section -can be summarized as follows :
A conic can be defined as the set of self-conjugate points of a polarityhaving at least one self-conjugate point.
APPENDIX TO CHAPTER X
Al. Factorization of linear transformations into polarities. In this sectionwe will show that every linear transformation in the plane is the product oftwo polarities. As always when speaking of polarities, we assume that thebase field K is commutative and that in it 1 + 10 0. Also at a certain pointwe shall assume K to be infinite, or, at any rate, that it has at least eightelements.
First we will prove an analogue of the stated theorem for linear transfor-mations (=projectivities) on a line. We define an involution to be a lineartransformation I such that 1.1 is the identity transformation. If I is aninvolution and 1: A--> A', then I : A'--->- A. Thus an involution pairs thepoints on a line into so-called conjugate points, which are interchanged by I.Conversely, if I is a linear transformation that interchanges pairs, then I isan involution.
LEMMA. If a linear transformation Ton a line l interchanges a single pairA, A', A # A', of points, then T is an involution.
PROOF. Let B be another point on l and let T : B ->B'. To show thatT : B'--.*. B. This is immediate if B = B', so we assume B 96 H. By an
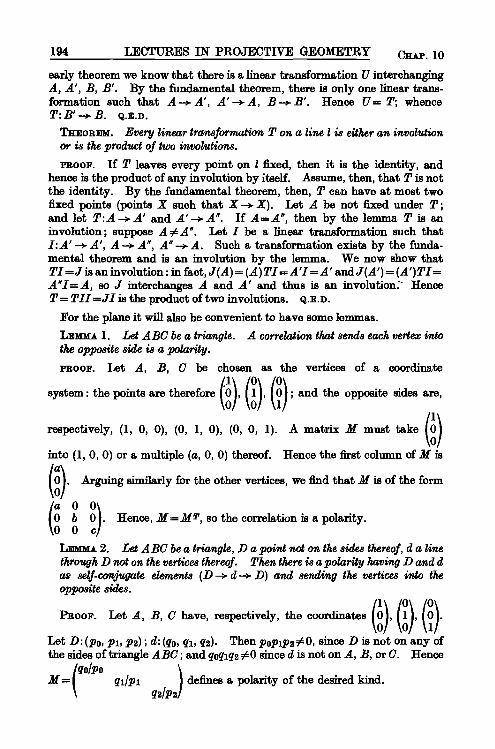
OO
P194 LECTURES IN PROJECTIVE GEOMETRY CRAP. 10
early theorem we know that there is a linear transformation U interchangingA, A', B, B'. By the fundamental theorem, there is only one linear trans-formation such that A -- A', A'--.*. A, B -a B'. Hence U = T; whenceT: B'-+ B. Q.E.D.
THEOREM. Every linear transformation T on a line l is either an involutionor is the product of two involutions.
PRooF. If T leaves every point on l fixed, then it is the identity, andhence is the product of any involution by itself. Assume, then, that T is notthe identity. By the fundamental theorem, then, T can have at most twofixed points (points X such that X -a X). Let A be not fixed under T ;and let T : A -* A' and A'-->. A If A = A", then by the lemma T is aninvolution ; suppose A # A". Let I be a linear transformation such thatI: A' -a A', A -s A", A" Such a transformation exists by the funda-mental theorem and is an involution by the lemma. We now show thatTI =J is an involution : in fact, J(A) = (A) TI = A'I = A' and J(A') = (A')TI =AI=A, so J interchanges A and A' and thus is an involution. HenceT= TII =JI is the product of two involutions. Q.E.D.
For the plane it will also be convenient to have some lemmas.
LEMMA 1. Let ABC be a triangle. A correlation that sends each vertex intothe opposite side is a polarity.
PROOF. Let A, B, C be chosen as the vertices of a coordinate
system :the points are therefore 01, (11, (01; and the opposite sides are,0/ \0/ \1/
1
respectively, (1, 0, 0), (0, 1, 0), (0, 0, 1). A matrix M must take (0)0
into (1, 0, 0) or a multiple (a, 0, 0) thereof. Hence the first column of M isa0 . Arguing similarly for the other vertices, we find that M is of the form0a 0 00 b 0 . Hence, M=MT, so the correlation is a polarity.0 0 c
LEMMA 2. Let ABC be a triangle, D a point not on the sides thereof, d a linethrough D not on the vertices thereof. Then there is a polarity having D and das self-conjugate elements (D -a d D) and sending the vertices into theopposite sides.
0 0PROOF. Let A, B, C have, respectively, the coordinates (01), 1), (0).
0/ 0 1
Let D: (po, p1, p2) ; d: (qo, qi, q2). Then poplp2 0 0, since D is not on any ofthe sides of triangle ABC; and goglg2 0 since d is not on A, B, or C. Hence
qo/1ooM= ql/pl defines a polarity of the desired kind.
g2/1o2

f9a
`'nea
r
a..
cry
,bb
car
0°4
,.O
CS
I gy'
0.o
'=3
Obi
F.,
`'"
Chi
F"m
F"+
r°.
iris
pap
eon-gm
SEC. 5 CONIC SECTIONS ANALYTICALLY TREATED 195
ThEOREM. Every linear transformation T in the plane is the product of twopolarities.
PBOOF. Let A be a point, a a line on A. Consider the transforms underT : A - - A' -*-A" and a -. a' -. a". In order to get at one main idea of theproof, let us assume that A, A', A" are not collinear, a, a', a" not concurrent,and that each of the lines a, a', a" is on just one of A, A', A" (namely, A, A',A", respectively).
We haveT : AA'aa' -i A'A"a'a",
and claim there is a polarity P such that
P: A'A"a'a" a'aA'A,
namely, the polarity, given by Lemma 2, which sends each vertex of thetriangle AA" (a a") into its opposite side and sends A' into a'. Then
TP:AA'aa' - a'aA'A.Thus TP=Q sends each vertex of triangle AA'(a.a') into its opposite side,hence, by Lemma 1, is a polarity. Therefore, T = T T. P P. P=Q P, whichshows that T is a product of two polarities.
It is possible that A, A', A" are collinear for every choice of A ; let us sup-pose that this is so. We can also suppose that T does not have three non-collinear fixed points, for if it does, then taking them as the three vertices of
aa coordinate system, T is affected by a matrix of the form b ), for
cwhich the theorem is readily verified. Thus, if there are fixed points for Twe may suppose them on some line 1. Let A be a point not on 1. ThenA 0 A'; and since A" is collinear with A, A', T takes line AA' into itself.Let now B be a point not on l and not on- AA'. Then BB' is also invariantunder T (where B'=T(B)). So is a fixed point of T. Nowlet C be any further point. If C is not fixed for T, then CC' must passthrough 0, as otherwise the vertices of the triangle of sides AA', BB', CC'would be fixed points. Let now C
C must go into a point on A'B' and into a point of OC, i.e., it must gointo OC A' B', which is C. Now take a = AB. Then a, a', a" are concurrentat C. Using the argument of the proof of Lemma 2, one can find a polarityP such that P: A'A"a'a" -a a'aA'A. The conclusion of the proof (in thepresently supposed case) is now exactly as in the last paragraph.
Going back to the case that A, A', A" are not always collinear, let A, A' A"be noncollinear. For a we must avoid the lines AA', AA". For a' we mustavoid A'A and A'A" and therefore for a we must avoid the lines which underT go into A'A and A'A". Similarly for a" we must avoid A"A, A"A', andthis comes to avoiding two other lines through A. Thus, if six lines throughA are avoided, one will find that of the lines a, a', a" at most one goes througheach of A, A', A" (namely a, a', a", respectively). We also wish to havea, a', a" not concurrent. Suppose a, a', a" are concurrent for three choices

Dip
e+' .
-.
"'m
."7q
CJ'
x14
Pam
.°°
.y"
`4`C
ell-
boo
:`C
360
P-1
196 LECTURES IN PROJECTIVE GEOMETRY CHA. 10
of a. The point of concurrency of a, a', a" is fixed for T, and so we get threefixed points. Assuming as we may by an argument of the last paragraphthat T does not have three noncollinear fixed points, we get three collinearpoints, and hence a whole line of fixed points. The case of a line of fixedpoints is dual to the case treated in the last paragraph. Therefore we mayassume that for three choices of a, not all three times are a, a', a" concurrent.Thus if we avoid eight lines through A in choosing a, we shall have the situa-tion supposed in the first paragraph, and the proof is complete.
DEFINITION. A plane figure consisting of points and lines is called self-dualif there is a one-to-one mapping of points to lines and lines to points pre-serving incidence.
COROLLARY TO THE THEOREM. The set of fixed points and fixed lines of alinear transformation forms a self-dual figure.
¶ Note: The above corollary holds with no restriction on the base field K. As thecase that K is infinite has already been covered, we may assume K finite. In the caseK is finite, one can show that any automorphism of PK2 has the same number of fixedpoints as fixed lines: see M. Hall, The Theory of Groups, p. 400. Now if A and B aretwo fixed points of an automorphism of PK2, the line AB is also fixed; similarly, if aand b are fixed lines, then ab is a fixed point. Thus the set of fixed points and linessatisfy our axioms 1, 2, and 3 (p. 43) for the set to be a plane. If there are four fixedpoints, no three of which are collinear, then our axiom 4* (p. 55) is satisfied, and theset of fixed points and lines forms a projective plane, hence certainly a self-dual figure.If axiom 4* does not obtain, the given set of points and lines (which satisfy axioms 1,2, 3) is called a degenerate plane. A simple analysis shows that a degenerate planehaving the same finite number of points as lines is a self-dual figure.
rROOF. Let the given linear transformation T be written as the productof two polarities : T= PQ. Let A be a fixed point of T. Then (A)P=a is afixed line of T : for (a)Q=A, whence (a)PQ=(A)Q=a. Similarly, if a is afixed line of T, then (a)P=A is a fixed point of T. Thus the polarity Psends the figure of fixed points and lines into itself.
Exercises
1. Find the different possible fixed figures of points and lines for lineartransformations. Excepting the identity, the figures are :
No fixed elements
I II III IV V VI VII
For K the complex field, the type VI cannot occur, though for K real itoccurs. Type VII cannot occur for K real or complex.
2. Write down equations for a linear transformation of each of the typesmentioned in the previous exercise.
3. A translation in the Euclidean plane induces in the associated projectiveplane a linear transformation of type IV.
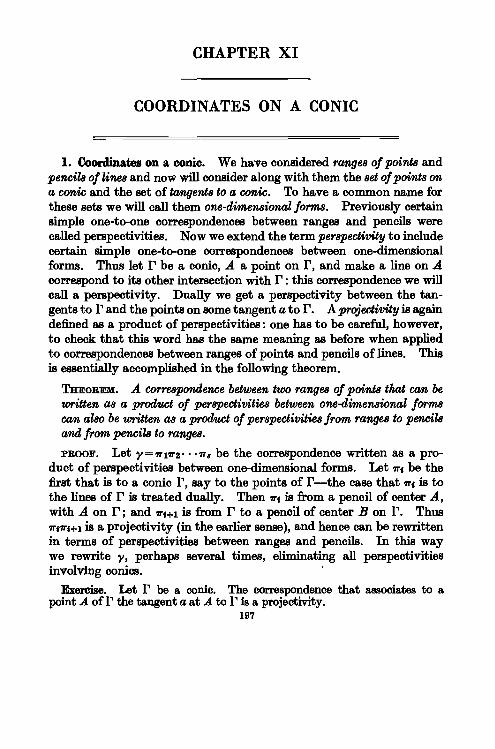
't!co
o
60'
`CD
f-,
Rim
.::
`ti
chi
L,"
`ti
.=I
wpm
CHAPTER XI
COORDINATES ON A CONIC
1. Coordinates on a conic. We have considered ranges of points andpencils of dines and now will consider along with them the set of points ona conic and the set of tangents to a conic. To have a common name forthese sets we will call them one-dimensional forms. Previously certainsimple one-to-one correspondences between ranges and pencils werecalled perspectivities. Now we extend the term perspectivity to includecertain simple one-to-one correspondences between one-dimensionalforms. Thus let r be a conic, A a point on r, and make a line on Acorrespond to its other intersection with P : this correspondence we willcall a perspectivity. Dually we get a perspectivity between the tan-gents to P and the points on some tangent a to P. A projectivity is againdefined as a product of perspeetivities : one has to be careful, however,to check that this word has the same meaning as before when appliedto correspondences between ranges of points and pencils of lines. Thisis essentially accomplished in the following theorem.
THEOREM. A correspondence between two ranges of points that can bewritten as a product of perspeetivities between one-dimensional formscan also be written as a product of perspeetivities from ranges to pencilsand from pencils to ranges.
PROOF. Let y = irlir$ . . 77, be the correspondence written as a pro-duct of perspectivities between one-dimensional forms. Let is be thefirst that is to a conic r, say to the points of P-the case that 4r{ is tothe lines of r is treated dually. Then vs is from a pencil of center A,with A on P ; and irs+j is from P to a pencil of center B on P. Thusassns+i is a projectivity (in the earlier sense), and hence can be rewrittenin terms of perspectivities between ranges and pencils. In this waywe rewrite y, perhaps several times, eliminating all perspectivitiesinvolving conics.
Exercise. Let P be a conic. The correspondence that associates to apoint A of r the tangent a at A to r is a projectivity.
197
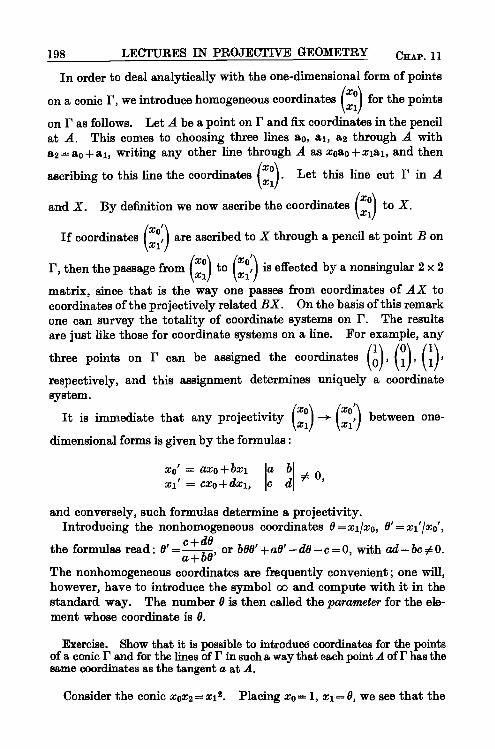
a`+
poi
dap
ZS
'
CAD
CAD
,r.
.:. 0
CD
7
-F)
0
198 LECTURES IN PROJECTIVE GEOMETRY Cs:A . 11
In order to deal analytically with the one-dimensional form of points
on a conic P, we introduce homogeneous coordinates (o) for the points
on P as follows. Let A be a point on P and fix coordinates in the pencilat A. This comes to choosing three lines ac, al, a2 through A witha2 = ao + al, writing any other line through A as xoao + xlal, and then
ascribing to this line the coordinates x0 . Let this line out P in A1)
and X. By definition we now ascribe the coordinates ( xc) to X.
If coordinates(X0,) are ascribed to X through a pencil at point B on
P, then the passage from (xi ) to (xo,) is effected by a nonsingular 2 x 2
matrix, since that is the way one passes from coordinates of AX tocoordinates of the projectively related BX. On the basis of this remarkone can survey the totality of coordinate systems on P. The results
anyare just like those for coordinate systems on a line. For example,
(11),three points on P can be assigned the coordinates (Q), (01),
respectively, and this assignment determines uniquely\\a coordinatesystem.
It is immediate that any projectivity (XO
)(x0,\ , ) between one-
dimensional forms is given by the formulas :
xo' = axo+bxl a b
xl' = cxo+dxl, I c d # 0'
and conversely, such formulas determine a projectivity.Introducing the nonhomogeneous coordinates 0 = xl/xo, 9' = xl'/xo
the formulas read : 0' = e + dB or boo' + a6'- dO - c = 0 with ad - be 0 0.a+bB' '
The nonhomogeneous coordinates are frequently convenient ; one will,however, have to introduce the symbol eo and compute with it in thestandard way. The number 0 is then called the parameter for the ele-ment whose coordinate is 0.
Exercise. Show that it is possible to introduce coordinates for the pointsof a conic r and for the lines of I' in such a way that each point A of P has thesame coordinates as the tangent a at A.
Consider the conic XOX2 = x12. Placing xo =1, x1=0, we see that the
CD
'
,,,
b`+
p'.
add
,,,
`ti.'"
'LS
'..
car
+I~'
'.oP.,
.,,
.v,
Size. 2 COORDINATES ON A CONIC 199
point (1, 0, 02) is on the conic; and that conversely every point on theconic for which x000, can be written in the form (1, 0, 02). Moreover,
0coordinates in the pencil of center (0) can be so chosen that the line
1
xl - 9xo = 0 has coordinate 0. Since any conic is projectively equivalentto xox2 -X,2=0, we can sum up the argument as follows :
TsEoREM. Given a conic 1', one can choose coordinates in the planeand coordinates on r so that the point on r of parameter 0 has coordinates
(1, 0, 02). (In homogeneous form: the point of conical coordinates61(°)
has plane coordinates (602, 6091, 012).)
2. Projectivities on a conic. Let 1' be a conic, P a point not on 1'.Let X be a point on 1', and let X' be the other intersection of PX with1' (X' = X if PX is tangent to 1'). The question is : Is the mappingX -> X' a projectivity?
That the answer is yes, at least for the complex field, can be madeplausible as follows. Introduce coordinates on r and let 0, 0' be thecoordinates of X, X', respectively. Given 0, we can, by algebraicformulas that mirror the geometric facts, find 0'. We find, or wouldfind, that 0, 0' are related by a formula f (O, 0') = 0, where f is a poly-nomial. We may suppose f free of multiple factors, since, if there aremultiple factors, we suppress the multiplicity-i.e., for example, if wehad, say, f = grh, with r> 1, we simply replace f by gh. Supposing nowthat f (6, 9') is free of multiple factors, it is not difficult to show that for ageneral value of 0 the polynomial f(6, 0') has no multiple factors (as apolynomial in 0'), although for special values of 0 there may well bemultiple factors. Thus, we see (or may suppose) that the degree off (O, 0') is the number of (distinct) roots 0' of f (O, 0') = 0 for general 0.Since X determines X' uniquely, the degree off (6, 0') in 0' is 1. By thesame argument, degree of f(9, 0') in 0 is 1. Thus, 0, 0' are related by a
formula: a66'+b6+c6'+d=0 or 6'= -b6-da6 +c
Here bc#ad; otherwise
0' would be constant. Hence 0, 0' are projectively related.What we have made plausible is that, if two variables 0, 0' are
algebraically related and if the correspondence 0 -* 0' is one-to-one,then 0, 0' are projectively related. This statement can be made preciseand given a rigorous proof-but not with the limited amount of algebrapresupposed for the book. Meanwhile the ideas expressed can be usedheuristically to guide us to some of the geometric facts.
Let us now proceed to a bona fide proof. In order to introduce a

area
CA
D
CD
R'2
'
CR
S
R.»
,"8 L
".4m
,
V.4
f,',4;
..b
NIA
°d°
.Zed",
nom`'"
.p+
mw
-,H
04
200 LECTURES IN PROJECTIVE GEOMETRY Cxar. 11
simplifying line of thought, we will first suppose K is the field of com-plex numbers. In this case the polar p of P meets r in two points.Let A be one of them. We may suppose the coordinates on P to beestablished via the pencil of center A. We have H(AP, p; AX, AX').By an early theorem, then, AX -> AX' is a proj ectivity; hence alsoX -->. X' is a projectivity.
For K the field of reals we can get a proof in the following instructivemanner. We consider simultaneously PNK and PNK, where K isthe field of complex numbers. We think of PNK as a subplane ofPNK : PNK consist of the points in PNK that have real coordinates.The conic r is given by some quadratic equation : we use this quadraticequation to define a conic r in PNK. The conic r then consists of thepoints on r' having real coordinates. The correspondence X -+ X' on Pis part of a similar correspondence on P. Applying the result for r,
we have O'= ao +S,
with a, P, y, S complex. Write a = a + ia', where
a, a' are real and i and similarly for f6, y, S. Then we haveB, = aB + b + i(a'B + b')
Consider this equation for real 0 only ; then 0'cO+d +i(c'B+d')
is also real, since (1, 0', 0'2) is a point in PNK. Cross-multiplying and
comparing real parts of both sides, we get O'=ae + b ; here ad be,c9+dsince 0' is not constant. Hence 0, 0' are projectively related, whichcompletes the proof for K real.
(For arbitrary K, at least if 1 + 1 0 in K, a similar line of argumentleads to the desired conclusion. Here again one would have to makeuse of certain advanced, although simple, algebraic notions not pre-supposed for the book ; and therefore we will not pursue this pointfurther. Besides we claim that the correspondence X -->. Xisprojectivein every case, even if 1 + 1= 0: we have made use of the inequality1 + 1 54 0 in bringing in the theory of polars.)
For a completely general proof, we follow up our initial suggestion offinding 0' when 0 is given ; we do this directly, and therefore haveno need for the heuristic remarks above. In order to bring thesecomputations within an expedient radius, we choose coordinate systemsin the plane and on the conic in such way that the computations aresimplified. According to the last theorem, we take r to be the conicxox2 = x12, with 0 as parameter, and {(1, 0, 02)} as the points of P. LetP : (a, b, c). Then we have :
a b c
1 0 02 =0.1 0' 0'2

(CD
AC
C
.-d.U
4'
q'ty'
.m0
J.'
0.'
AC
V
SEC. 2 COORDINATES ON A CONIC 201
Subtracting the second row from the third, we get
a b c
1 0 02
0 0'-9 0'2-02= 0, (0,-0).
a b c1 0 02
0 1 0'+9= 0.
This determinantal equation expresses the condition that the point X'(of coordinate 0') be simultaneously collinear with P and X and on r :there are two points X' that satisfy this condition, namely, X itselfsatisfies the condition, and there is one "other" point X' that satisfiesit. The fact that there are "two" values of X' is reflected in the factthat the equation is of degree 2 in 0'. The equation has 0'-0 as afactor. We get the "two" points X' by setting the factors separatelyequal to zero. The equation 0' - 9 = 0 gives one value of X', namely X.
a b cThe equation 1 0 02 =0 gives another value of X' (which may
0 1 0'+Bcoincide with X). It is this second value of X' that is originally put
a b cinto correspondence with X. Therefore 1 0 02 1=0 gives the
0 1 +0desired relation between 0 and 0'.
Expanding we find: a99'-b(9'+0)+c=0, or0'=b9-c;
and b20ac,a0-bas P : (a, b, c) is not on r : xex2 =x12. Hence 0 and 0' are projectivelyrelated. This completes the proof in the most general case.
Defining an involution to be a projectivity whose square is the iden-tity, we can sum the above and its converse in the following theorem.
THEOREM. Let F be a conic, P a point not on F. Let X be a point onF and let PX cut r again in X'. Then the mapping X X' is aninvolution. Conversely, every involution can be obtained this way.
PROOF. For the converse, let X1 E-a X1', X2 H X2' in some involu-tion. Consider the involution determined on r by the pencil of centerP = X 1X1' X 2X2'. Both involutions coincide on X 1, X 1', X2, henceare identical.
Exercises
1. Find the equation of the involution sending oo --* oo, 0 - Bo.2. Show that the following is a construction for 01+02 on a conic. Join
01 and 02 and let this line cut the tangent at oo at P. Then the line joiningP to 0 intersects the conic again at 01+02. Show'that the following is aconstruction for 91.02. Join 01 and 02 and let this cut the join of 0 and oo atP. Then the line joining P to 1 cuts the conic again at 0102.
min
04'
"
.'Y
map
aim
c°°
'damP4'm
aw
3.S
°°wm
om'
mw
.
°F'
202 LECTURES IN PROJECTIVE GEOMETRY CHAP. 11
3. Consider the Euclidean plane, and on its line at infinity establish apairing of points X -+ X' by making X and X' correspond if lines throughX and X' (and entering the Euclidean plane) are perpendicular. Show thatX -s. X' is an involution. Hence, show that if r is a conic and A a pointthereon, then the chords BC (B on r, C on P) which subtend a right angle atA (i.e., for which BAC is right) all pass through a point on the normal to rat A (normal at A =line perpendicular to tangent at A).
4. By a change of coordinates, bring the conic 3x02+x12-5x22-2x1x2+x0x2=0 into the form x1'2=X0 x2'. Hence, find a parametrization of thegiven conic of the form :
xo = a00e2+a01e+a02, xl = a1002+alle+a12, x2 = a20e2+a210+a22Here det (a{& 0; otherwise the points (x0, x1, x2) would all lie on a line.
5. If 0 varies over K, the point (a0092+a01e+a02, a1002+a110+a12,a2002+a210+a22) traces out a conic, provided det (a{q) &0.
6. Let 0-> 0' be a projectivity on a conic P. If 0--* 0' is an involution,then the line joining 0 and 0' passes through a fixed point ; if 0 - 0' is not aninvolution, then the line joining 0 and 0' is tangent to a fixed conic.
7. Let r, P' be two conics. Any linear transformation taking r into r,induces a projectivity between r and r'. Conversely, every projectivitybetween r, r' can be obtained this way. Recall a previous exercise to theeffect that there is one and only one linear transformation taking r into P'and three given points A, B, o of r, respectively, into three given pointsA', B', C' of P'.
Fl.
',n`r
3...
I`?
ti,
l08
e°+
ear
o0.
8,'
V.-
1.4^.,
m-0
4310m.,
CHAPTER XII
PAIRS OF CONICS
1. Pencils of Conics.t Let xTAx = 0 and xT Bx = 0 be conies (AT = A,BT = B). By a pencil of conies we mean all the conies of the formxT (AA +,uB)x = 0. We can fix (A, µ) as coordinates of a conic in thepencil : introducing A/µ, instead of A, µ, one frequently writes the pencilin the form xT (AA + B)x = 0, where A = oo comes into consideration.
The locus x T(AA + B)x = 0 need not be a conic : necessary andsufficient for it to be a conic is that AAA + BI 0. The conditionAA + B = 0 is a cubic in A ; therefore, in K there is at least one solution ;
and there are exactly three if each root Ao is counted to the numberof times A - Ao is a factor of the polynomial I AA + B 1. For any suchroot A0, the locus xT(AoA + B)x = 0 consists of two lines, or just one ifxT(AoA + B)x is a perfect square, in which case we say the line is countedtwice. A locus consisting of two lines, or one counted twice, is con-veniently referred to as a degenerate conic; and the degenerate coniesare also conveniently included in the pencil xT (AA + B)x = 0 (i.e., in orderto include degenerate conies, we change slightly the definition of pencilgiven in the previous paragraph).
Let A, B, C, D be four points, no three of which are collinear. Thenthe conies through A, B, C, D (including the degenerate ones) form apencil. In fact, let f = 0, g = 0 be two nondegenerate conies throughA, B, C, D, where f, g are polynomials of degree 2. Then of+g=0is also a conic, possibly degenerate, through A, B, C, D, as one immedi-ately checks. Conversely, any conic, possibly degenerate, throughA, B, C, D, is of the form Af + g = 0. To see this, first consider a non-degenerate conic h = 0 through A, B, C, D. We can suppose that h isnot a multiple off, as in this case we get h from of + g by placing A= Co.Let E be a point on the conic h = 0 not on the conic f = 0 (any point Eon h = 0 distinct from A, B, C, D will have this property). We nowsubstitute the coordinates of E into of + g = 0 arid solve for A. This
t In the present chapter, the base field K is taken to be the complex number field.203
ti,...
coo
;..m
`+,
r..
...
coo
cm,
off
......
.O-
.+,
CO
C
"lo
mod
'C
s.
erg
R-'
AC
S
`4~
'-ti
,'aan
dof
f'
e°+
G':
V'!
DD
".'3
..,
P40
Few
..,tow
R''
.go°0H
+.q
E''
&',
.,.''y
c°+
,II
E.1
'«+.C
:
+°i
.`D0010.
Pig
204 LECTURES IN PROJECTIVE GEOMETRY CHAP. 12
gives a locus of+g=0 which passes through A, B, C, D, E. This locusis nondegenerate, since no three of A, B, C, D, E are collinear. Thusthe conics h = 0 and of + g = 0 have five points, no three of which areoollinear, in common, and therefore coincide. This completes the prooffor A= 0 nondegenerate, and the degenerate case is handled similarly.
Exercises
1. Prove that a pencil of conics is a geometric object.2. Let f=0, g=0 be two conics (not necessarily meeting in four distinct
points). Let h=0 be a conic in the pencil ,1f+µg=0 different from f=0.Then f= 0 and h = 0 determine the same pencil as f = 0 and g = 0.
2. Intersection multiplicities. Previously we defined an algebraiccurve to be a locus given by a homogeneous polynomial equation :f (xc, x1, x2) = 0. The degree of f = 0 is called the order of the curve.Let f = 0, g = 0 be two curves having only a finite number of points incommon. There is a famous theorem, the theorem of Bezout, thatstates that there are certain geometric objects associated with thepoints of intersection of the curves, certain positive integers, the so-called intersection multiplicities, such that the sum of the intersectionmultiplicities equals (dog f) (deg g).
The establishment of Bezout's Theorem, though perhaps possible onthe basis of the algebra presupposed, lies beyond the scope of this text.Instead, we will make an ad hoe attempt to understand Bezout'sTheorem for the case of two conics. The main point is to defineintersection multiplicity at a point P of two conics passing through P.
We make some heuristic remarks. Above we saw that the conicsthrough four points A, B, C, D, no three of which are collinear, form apencil. Let f = 0, g = 0 be two conics through A, B, C, D. Since byBezout's Theorem, the sum of the intersection multiplicities is 4, thisshows us that we should define the intersection multiplicity at A, B, C, Dto be 1 each. Other cases of pencils can heuristically be thought of asarising by our letting some of the points A, B, C, D come together ; if mpoints come together at A, we should define the intersection multiplicityat A as m. If we consider the pencil hf + g = 0, then the points A, B, C,D are the same for any two members of the pencil. Hence to definethe intersection multiplicity of f = 0, g = 0 at A, a point of intersection,we may (or should be able to) replace f, g by any two members of thepencil Af + g = 0. Let us replace them by f and one of the degeneratemembers of the pencil. The degenerate conic consists of two lines, 11, 12.It is clear how we should define the intersection multiplicity of 11 withf=0 at A-namely, it should be 0 if ll does not pass through A ; itshould be 1 if l1 passes through A but is not tangent to f = 0; and it
and
ti,co
o
III
'-ti
e+-
..mea
rca
r
...ca
r
`C'
cry
f+,
'.3
.07
(OD
'fl
r'{
`ti
'C+
4-J.6a
Q''
"°h4110
._,im
p
.0+...
4-D.4'
Sac. 2 PAIRS OF CONICS 205
should be 2 if l1 passes through A but is tangent to f = 0. This shouldbe true also for l2 ; and the intersection multiplicity at A of 11+12should be the sum of the individual multiplicities.
There is one difficulty in the above suggestion for defining the inter-section multiplicity of 1=0 and g = 0 at A ; namely, in the pencilof + g = 0, there may be two distinct degenerate conics l1 + l2 and 1s +14;and conceivably the intersection multiplicity as defined by l1 + l2 is notthe same as that defined by 13+14- Conjecturing that this is not so,we are led to the following theorem :
THEOREM. Sum of intersection multiplicities of l1 and of l2 at A = sumof intersection multiplicities of i3 and of l4 at A.
Before giving the proof, we classify the possible ways a pair of linescan meet a conic. We take into consideration (a) whether the lines aredistinct, (b) if they are, whether their intersection is on the conic, and(c) whether one or more of the lines is tangent to the conic.
CASE (i) : the lines are distinct, do not meet on the conic, and neitheris tangent to the conic.
CASE (ii) : the lines are distinct, do not meet on the conic, and justone of them is tangent to the conic.
CASE (iii) : the lines are distinct, do not meet on the conic, and bothof them are tangent to the conic.
CASE (iv) : the lines are distinct, meet on the conic, and neither istangent to the conic.
CASE (v) : the lines are distinct, meet on the conic, and just one ofthem is tangent to the conic.
CASE (vi) : the lines consist of a line not tangent to the conic countedtwice.
CASE (vii) : the lines consist of a tangent counted twice.
PROOF OF THE THEOREM. Let l i + l2 present case (i) relative to f = 0.Then l1 and l2 intersect f, = 0 in four distinct points A, B, C, D, with,say l1= AB, 12=CD. The possibilities for 1s, l4 are 13=AC, 14=BDand Is=AD, 14=BC. In every case one checks the theorem : bothsides of the equality are equal to 1.
Let 11+12 present case (ii) relative to f = 0. Let li be tangent to theconic at A and l2 cut the conic in BC (B0C). Introduce nonhomo-geneous coordinates by taking a line at infinity not through A, B, C ;taking A to be the origin ; and taking l1 to be the x-axis (y = 0 ). Then fhas the form ax+by+Q(x, y), where Q(x, y) is the sum of quadraticterms. We know how to compute the tangent at A = (0, 0) to f = 0;and doing this, we find that it is ax + by = 0. Since we took y = 0 to bethe tangent, f has the form y + Q(x, y) (or a constant c 0 times this,
4z%
4,-
Is.
p,,
(OD
may
'mom
ti,
(C'
t'".+
,,'n
C+
-
t:,II
Ica
r:..
fin.
,'a.a
+.-
.!'"
'.y
aid
4.,
tap"'d
=-P
tomago
-42
'ti
C.'
11°
`++
c'''
4-D
mad °Q
0R
,.
206 LECTURES IN PROJECTIVE GEOMETRY CHAP. 12
but we may take c = 1). Let ux+vy+w=0 be equation of 12; w#0since 12 does not pass through A. Let h = y(ux + vy + w). Sinceh = rf+ sg, r, 8 constants, 8 # 0, the linear combinations off and g are thesame as the linear combinations of f and h; therefore, in looking for thedegenerate members Af+µg, we may as well look for the degeneratemembers of + ph. Suppose, then, that of + µh = 0 consists of twostraight lines. If both lines pass through A, then these lines must beAB and AC (since of +µh vanishes at B and at C) ; and in this case thetheorem can be verified at once. If just one of the lines passes throughA, then A f + µh = (ax + by) (ex + dy + 1) ; therefore the linear terms ofof + µh are ax + by : but the linear terms off and of h are y ; thereforeof+µh=by(cx+dy+1). Of the two lines of+µh=0, then, one mustbe y = 0; and since Af + µh vanishes at B and at C, the other line mustbe BC. In this case, the theorem is trivially verified.
Let 11+12 present case (iii), and let 11 be tangent at A and 12 tangentat C. Let 13 + 14 be a degenerate member of the pencil of +,ug = 0. Ifjust one of l2, 14 passes through A, then by the argument of the lastparagraph this must be the tangent at A ; in that event, only one oflg, 14 passes through C, and, by the same argument, it is the tangent at C.Thus l1 + 12 = l2 + l4 in this case, and the theorem is verified. Theremaining case is that both l2i 14 pass through both A and C. In thiscase 13 = 14 and again the theorem is immediately checked.
Let 11+12 present case (iv), 11, 12 meeting at A and cutting the conicat B and C. Introduce nonhomogeneous coordinates with a line atinfinity not through A, B, or C ; with A at the origin ; and with y = 0 astangent to f = 0 at origin. We want now to consider the degenerateconics of the form of + µh = 0, where h = 0 is equation of l1 + 12 (andhence h has no linear terms ; /= y + quadratic terms). Requiringhf + µh = 0 to pass through a point D on BC, DOB, DC, makesof + µh = 0 breakup into two lines, one of which is BC. The other mustpass through A. Moreover, this other one is y = 0, since the linearterms of AAf+µh are Ay. Thus, we are in case (ii), and the theoremis proved in this case.
Let l1 + l2 present case (v). Let them meet at A. Introduce non-homogeneous coordinates with A the origin, y = 0 the tangent, andx = 0 the other line (so that xy = 0 is the equation for 11+12; andf= y + quadratic terms) ; let this other line cut the conic again at B.We first observe that both lines 13, l4 of a degenerate conic Af + µxy = 0must pass through A. If only one did, then by a previous argumentone sees that this must be y = 0 ; say y = 0 is 12. The other line, l4, thenwould pass through B ; and since the total intersection of l2 + l4 withf= 0 is A + B, l4 would have to be the tangent at B. But then l2 + l4presents case (iii), and we saw under case (iii) that if one of the degene-
.'3
r+.
colic
)
.....,
`ti
'til
eye
III
...
p+°
"lo
coo
e+-
C+
,
I'd(C
D
°.,
L".
SID
C".
-4-y-.
°'o
+s'
o..,.43
'ti
+°'
a_")
...a°)
SEC. 2 PAIRS OF CONICS 207
rate conics is in case (iii), the only other one is in case (vi), whereas itis in case (v). Thus both ls, l4 must pass through A. Therefore, theequation of l8 + 14 must have no linear terms. Now Af + µxy = 0 is anequation for 13+14. Therefore, A=O (as there must be no linear terms).Hence 13+14=11+12 and the theorem is verified in case (v). (Note thatin case (i) there are three distinct degenerate members in the pencilof + µg = 0; in cases (ii), (iii), (iv) there are just two degenerate mem-bers ; whereas in case (v) there is just one degenerate member.)
Let 11 + l2 present case (vi), so that 11= 12 and l1 cuts f = 0 in pointsA and B. Introduce nonhomogeneous coordinates with a line atinfinity not through A or B, with A the origin, y = 0 as tangent at A tof=0, and x = 0 as line AB (so that 11+12 has the equation X2=0;f=y+ax2+bxy+cy2). In the pencil AAf+µx2=0, consider y+ax2+bxy + cy2 - axe = 0. This is a degenerate conic : y(l + bx + cy) = 0. Oneof these lines, y = 0, passes through A and is tangent there-thereforedoes not pass through B ; hence the other line 1 + bx + cy = 0 passesthrough B. The conic y(1 + bx + cy) = 0 cuts f = 0 in A + B, and there-fore 1 + bx + cy = 0 cuts f = 0 in at most A + B ; but since this line doesnot pass through A, it must cut f = 0 only in B, hence is the tangent at B.Thus we come back to case (iii), and the theorem is verified in this case.
Finally, let 11 + 12 present case (vii). Let 11 + 12 out f = 0 at A. Thepoint A is the total intersection of f = 0 and g = 0; hence also the totalintersection of f = 0 and any degenerate conic is + 14 in the pencil A f +µg=0. Hence 13=14= (tangent to f = 0 at A)= 11=12- In this case thetheorem is, of course, verified at once.
To sum up : we define the intersection multiplicity of f = 0 and g = 0at P to be sum of intersection multiplicity of l1 with f = 0 at P andintersection multiplicity of l2 with f = 0 at P, where 11 + l2 is any degene-rate member of the pencil of + µg = 0. With this definition, Bezout'sTheorem is verified for conics.
COROLLARY. Let h = 0 be any conic in the pencil Af + µg = 0. Thenthe intersection multiplicity of h = 0 with f = 0 at P is the same as that ofg=0 with f=0 at P.
PROOF. Both intersection multiplicities are defined via the samedegenerate member of the pencil of + µg = 0.
Exercises
1. Let P be a point not on the conic 1':f=O. Let 1=0 be the polar of Pwith respect to P. Then 12(P)f-f(P)12=0 is the equation for the pair oftangents from P to P.
2. Two conics f=0, g=0 meeting at P have intersection multiplicity 1there if and only if the tangents at P to f = 0 and g = 0 are distinct.
t-+
r'3
-.q
L"+
t'.4.5
S2+
4)i%
)i+
-1
a.0
CHAPTER XIII
QUADRIC SURFACES
1. Projectivities between pencils of planes. In this chapter we willwork in a PNK3, with K, at least at first, an arbitrary commutativefield. By a pencil of planes we mean the set of planes on a line. Letaoxo+alxl+a2x2+a3x2=0, boxo+blxl+b2x2+bsx2=0 be two (dis-tinct) planes : we refer to the planes a and b, where a abbreviates(ao, al, a2, a3). Clearly every plane Aa+µb passes through the inter-section of a and b, since ax = 0, bx = 0 implies (Aa + µb)x = .tax + µbx =0 + 0 = 0. Conversely, every plane through the intersection of a and bis of the form Aa + µb. In fact, let c be such a plane and let x be a pointof c not on the intersection of a and b. Solving sax + µbx = 0 for A, µ,we get a plane passing through the intersection of a and b and throughx, hence coinciding with c.
We establish coordinates in the pencil of planes on a line l as follows.Take three planes Tr irb, a. on 1. Then c = Aa + µb. Replacing a byAa, b by µb, we adjust the 4-tuples a and b so that c=a+b. Then anyplane d on l is such that d = pa + ab and (p, a) are called the coordinatesof d in the coordinate system (7r 7Tb, 7r.).
In a similar way, in fact dually, we establish coordinates in a range ofpoints.
Now let p be a pencil of planes on a line 1; and let m be a line notmeeting 1. Then we define a perspectivity from p to m as follows : aplane Tr of p goes into the point of intersection Tr n m. Similarly wedefine a perspectivity from m to p. A projectivity is then, by definition,a product of perspectivities. (In defining projectivity we presumablyought also to allow the perspectivities between ranges of points and(plane) pencils of lines: this is so, but the above procedure will besufficient for our immediate purposes.)
On a line, let (PA, Pb, P.+b), (P.,, Pb', Pa'+b') be two coordinate sys-tems. Let a=Aa'+µb', b=pa'+ab'. Then xoa+xlb=(Axo+pxi)a'+
208
rte
't3 icy
,-A
SEC. 1 QUADRIC SURFACES 209
(xo1 p ol A p(µxo + vxl)b', whence
\xl,l= ( \A
µ Q) ('x ;moreoverµ 10 0. Thus
new coordinates = nonsingular` 2 x 2 matrix times old coordinates.Conversely, any nonsingular 2 x 2 matrix yields a coordinate change.Similar considerations hold for pencils of planes.
Now we obtain equations for a perspectivity between a pencil p anda range m. Let p be determined by two planes a, b ; and let Tra, Trk, aa+bdetermine a coordinate system in p. Let m intersect a, b in x, y,respectively; and adjust x, y so that m intersects 7Ta+b in x+y. Thenax=O, by=O, (a + b) (x + y) = 0, whence ay + bx = 0. Then Tray+µbintersects m in P4+,.Y: in fact, (Aa+µb)(Ax+µy)=A2ax+Aµ(ay+bx)+
AAt
µ2by = 0 + 0 + 0 = 0. Hence, if the perspectivity is\µ/
- (''i),then, in
the coordinate systems determined by Trb, Tra+b)`a////nd(Ps, PY, PP+Y),
the transformation is given by ( µ \/ = \1
0) ), i.e., the transforma-0 1 µ
tion is effected by a matrix multiplication (namely, by (0 )).From our knowledge of all coordinate systems in p and in m, we seethat in any coordinate systems, the perspectivity is effected by a 2 x 2matrix. Hence also any projectivity is given by a 2 x 2 (nonsingular)matrix. Since the analytic expressions for the projectivities here con-sidered are the same as those previously considered between lines in aplane, the same, or corresponding, theorems of existence and uniquenesshold here as before. In particular we have the following theorem.
THEOREM. There is one and only one projectivity sending three givenplanes of one pencil respectively into three given planes of another pencil.
Exercises
1. Establish this theorem in a purely synthetic way, assuming that thefundamental theorem holds in some plane.
2. Define (as before) a perspectivity between a range of points and apencil of lines ; and dually define perspectivity between a pencil of planes anda pencil of lines. Let these additional perspectivities intervene in a newdefinition of projectivity between two pencils of planes. Show that the newdefinition is equivalent with the old. Use analytic methods if this seemspreferable.
THEOREM. Let p, p' be two pencils of planes on two skew lines 1, 1'.Let m be a line skew to both 1, 1'. Let a be a (variable) plane on 1.Then Tr -+ 7r'= (v n m) l' is a projectivity between p and p'. Con-versely, every projectivity between p and p' arises in this way.
PROOF. That 7r--.>- 7r'=(7r n m) l' is a projectivity is immediate from
p,.
ado
ado
'01
Mpg
'CS
p,,
C'.
ear
paw
'41
--s
ti'co
o
cue
60,
`''ce
pti"
cue
"pp
.-r
f+,
t«+
210 LECTURES IN PROJECTIVE GEOMETRY CaA. 13
the definition. Conversely, let -r be a projectivity between p and p'.Let orli or2, 1r3 be three planes on 1; and let orl', 1r2', ors' be their imagesunder r. Let 7rl 0 ?rl' = nl, 112 r) 7r2' = n2, ors Pl 7r3'=n3. The threelines n1, n3, ns, meet 1, 1' and are distinct from them (for example,n1 # 1, since nl is in a plane on l' but l is not). The lines n1, n2, n8 aremutually skew : in fact, n1, n2 could not meet on 1', as then in wouldequal 1r2; and similarly nli n2 do not meet on 1; hence they do not meetat all, as otherwise by Pasch's axiom 1, 1' would meet. Now let Ql beany point of n1; then through Ql there is one and only one line meetingn1, n2, n3. Certainly at most one line, otherwise n2, ns would be co-planar with these lines, and this is not so. To get the one line, join Q1to n2 and let this plane cut n3 in Q3. Then QiQ3 cuts n3 in a point Q2;and Q1Q2Q3 is the desired line. Take Ql not on 1 or l' and call theresulting line m. Then m is skew to 1, otherwise at least two of n1, n2, n3are coplanar ; and m is similarly skew to 1'. Let a : rr -* 7r'= (?r r) m) 1'.Then a and r coincide at three elements of p, i.e., at orli ore, i3 Hence,a=-r by the previous theorem. Q.E.D.
2. Reguli and quadric surfaces. By a regulu8 one means the set oflines meeting three mutually skew lines. By a quadric surface onemeans the set of points lying on the lines of a regulus.
NOTATION. The quadric surface consisting of the points on the linesmeeting three mutually skew lines 1, 1', m is designated Q(l, 1', m). Ifr : a --> 7r'= (or n m) l' (where 7l is on 1), then the surface is also desig-nated Q(l, I'; -r).
The regulus of lines meeting 1, 1', m is called the first regulus ofQ(l, l', m).
Exercise. Any two lines of a regulus are skew to each other.
THEOREM. If a line meets three lines of a regulus, in particular, thefirst regulus of Q(l, 1', m), then it meets them all. Hence the lines meetingall the lines of the first regulus themselves form a regulus, called thesecond regulus of Q(l, 1', m). The first regulus consists of all lines meet-ing all lines of the second regulus. Through any point of any line of thefirst regulus goes one and only one line of the second ; and through anypoint of a line of the second regulus goes one and only one line of the first.
PROOF. Let m meet three lines l1, 12, is of the first regulus. By anotation considered above, let Q(l, 1', m) =Q(l, I'; T); and similarly, letQ(l, 1', m) =Q(l, 1' ; f). Both r and z send the planes llli 112, 113 intoI'll, l'12i l'13, respectively. Hence r=r; and so the first regulus ofQ(l, 1', m) (which consists of the intersections of corresponding elementsunder r) coincides with the first regulus of Q(l, 1', m). This proves thefirst point of the theorem. The lines that meet all the lines of the first

Ha.
cep
cep
'GO
obi
.'+
F'+
zap
caw
E..
.N_
r°4sm
.
SEC. 2 QUADRIC SURFACES 211
regulus are the lines that meet some specified three of them, hence forma regulus : this proves the second point. The set of lines meeting thesecond regulus is, by what has already been proved, the same as the setmeeting any three of them, in particular, 1, 1', m, and thus is the firstregulus : this proves the third point. Let P be a point on a line of thefirst regulus. Through P take a line meeting two other lines of thefirst regulus ; this line will belong to the second regulus ; similarly if Pis on a line of the second regulus. The proof is now complete.
COROLLARY. Let 11, ll', m1 be distinct lines of either the first or of thesecond regulus of Q(l, l', m). Then Q(l, 1', m)=Q(l1i ll', m1).
THEOREM. If a line meets a quadric in three points, then the line belongseither to the first or to the second regulus.
PROOF. Let n meet the quadric in P1i P2, P3. Suppose n does notbelong to the first regulus. Then n meets the lines through P1, P2, P3that do belong to the first regulus. Hence n belongs to the secondregulus.
Exercises
1. No two lines of the same regulus meet. Every line of the first regulusmeets every line of the second. No plane can lie entirely in a quadric.
2. On a quadric there are no reguli except the two already accounted for.
THEOREM. If a plane cuts a quadric in one line, it cuts it in a secondline; the two lines belong to the two reguli.
PROOF. Let 7r go through 1; and let l belong, say, to the first regulus.Let l' be another line of the first regulus, and write the quadric in theform Q(l, l' ; r). Let r(ar) = a'. Then yr r) ir' = m is a line of the secondregulus, and it passes through m.
DEFINITION. Let P be any point of a quadric and let 1, m be thelines of the first and second reguli through P. Then plane (1, m) iscalled the tangent plane to the quadric at P.
THEOREM. If a plane is not tangent to a quadric, then it cuts the quadricin a (nondegenerate) conic.
PROOF. The plane vr* contains no line in the quadric. Let thequadric be Q(l, I'; r). Let r : a -; Tr'. Then it (1 rr* -+ 4r' (1 ,r* is aprojectivity, not a perspectivity, as otherwise the fixed line of theperspectivity would be in Tr* and on the quadric. The section ur* riQ(l, V; r) is the set of intersections of corresponding elements of thisprojectivity, and so is a conic. Q.E.D.
..,
p.,
mop
o"[
212 LECTURES IN PROJECTIVE GEOMETRY CRer. 13
THEOREM. Every quadric surface has in some coordinate system theequation xox3 = xlx2.
mooF. Let ii, 12, 13 be three lines of the first regulus, m1, ms, m3three lines of the other. Let ll ml = A, Is-m,=B, ll m3 =C, 13-ms=D,l2 m2 = E. No three of A, B, C, D, E are collinear, so they may begiven coordinates
1 0 0 0
(1),
0 1
(00),
0
0 0 1 00 01), 1 1
respectively. Let 12-MI=P, Il m2 = 0, 13 ms = H, 12-MS=I- Thepoints F, E, I are collinear : hence the coordinates of E are a linear com-bination of those of F and I. The first two coordinates of I are zero.Hence the first two coordinates of F are proportional to the first two
1
of B ; hence equal. Thus the coordinates of F are (001)_ Similarly
1 0 0
"00C: H: , I: . Let P:x2
0 (011) 1 xs
be on the quadric. Let the line of the first regulus through P out ml,m3 in B, U, respectively; let the line of the second regulus through Pout ll, is in S, T, respectively. Then by an argument of the type justemployed for F, one finds the coordinates of R, S, T, U to be, respec-tively,
x xo 0 0
x 0 xl 0
0)(x2 ' 0 x2
0 0 xs x3
xo 0
Let ST meet 12 in V; then V : p(o)+1()O1
where p # 0, a A 0.
0 xs
This point is a linear combination of F and I ; hence the first twocoordinates are equal, and so are the last two. Therefore, pxo = axl,px2 = ax3, whence
pa(xlx2 - xoxs) ='O and x1x2 - xox3 = 0.
SEC. 3 QUADRIC SURFACES 213
Conversely, suppose a point satisfies the condition x1x2 - xoxs = 0.If one of the coordinates, say xo, is zero, then also one of x1, x2, sayxl = 0; the point is then on line CD, hence on the surface. Therefore,we may suppose xoxlx2x3 # 0. Let
xo
(X:)'
0 0
(x1)
(0) lxl 0
0 0 xs0 x3 x3
be labeled 11, S, T, U, respectively. The point
xo 0 xlxo
xl 0+xo
xl = xixaX2 0 xlxs
0 x3 xoxa
o
is on FI. Hence ST is a line of the second regulus, and on it lies (XX1
a
CoRoLLARY. Any two quadric surfaces are projectively equivalent:any one can be sent into any other by a linear transformation.
COROLLARY. In any coordinate system a quadric is given by a homo-geneous quadratic equation.
3. Quadric surfaces over the complex field. Let
f (xo, x1, x2, 23) = aooxo2+aolxoxl+ao2XOx2+aosxoxa+ al lx l2 + al2xlx2 + alsx ixa + a22x22 + a23x2x3 + a33x32
be an arbitrary quadratic form in four variables. As in the case of threevariables, we can write f in one and only one way in the form xTAxwith AT=A.
Starting with PNK3, we consider the coordinate changes of ChapterVIII. If a locus in one coordinate system is given by xTAx=O, withAT = A, then in any other coordinate system it is given by x' T BTABx' =0. Here, if x = Bx', one finds xTAx = x'TBTABx'. Note that
(BTAB)T = BTATBT T = BTAB.
THEOREM. If xTAx = 0, with AT = A, is a quadric, then det A:)4- 0.
'-d
117
boy
.+.
'.sC
3+
ti,ID
.'`3
of.
,.C,°
f, acs
pea
a°g
ear
War
41o
coo
rO'
F->+
.d
9.-
+b,
214 LECTURES IN PROJECTIVE GEOMETRY Caer. 13
PROOF. Change of coordinates brings xTAx into the form xl'x2' -xo'x3' = 0. The matrix for X1'X2' - XO'X3' is
0 0 0 -1/2G,- 0 0 1/2
)0
0 1/2 0 0
-1/2 0 0 0
i.e., xl'x2'-xo'x3'=x'TCx'. Hence, for some matrix B, BTAB=C.Since det C= (det B)2. det A, and det C 0, we have det A 0. Q.E.D.
Conversely, for the complex number field, we have :
THEoREM. If det A O 0, then xTAx = 0, with AT=A, is a quadric.
PROOF. Given any homogeneous quadratic form f(xo, X1i X2, Xs) wecan by a nonsingular linear transformation bring it to the form axo2+bx12 + CX22 + dx32 = 0. The method of doing this has already beenemployed in the case of conics. If f=xTAx and axo2+bx12+ex22+dx32 = xTBTABx, then det BTAB = (det B)2 det A # 0. Moreover,det BTAB = abed. Therefore a 96O, b0, c960, d zA0. Making thetransformation x0' =1/ax0i xl' _ '%/bxl, x2' ='y/Cx2, X3'=/X3, one canbring f=0 to the form xo2+x12+xst+x32=0. Thus every locusxTAx = 0 is projectively equivalent with any other locus xTAx = 0provided det A # 0 and det j zA 0. In particular every such locus isprojectively equivalent with XIX3 - x0x2 = 0 ; i.e., it is projectivelyequivalent to a quadric, and so it is a quadric. Q.E.D.
Exercise. The theorem is false for K=real field.
4. Some properties of the sphere. In this section we start with theEuclidean 3-space (over the reals) and assume an elementary knowledgeof Euclidean geometry. Just how much is assumed is intentionallybeing left a little vague, as we wish to make some illustrations withoutcommitting ourselves either to a detailed development of the subjector to a linking of it with projective geometry.
First, some properties of circles in the plane will be considered. Theplane is the Euclidean plane, but we adjoin the line at infinity as ex-plained earlier.
So far in studying projective geometry we have always posited a basefield K. Now, however, we will employ a useful concept, namely, thatof extending the base field. Let L be, a field containing K and let analgebraic curve in PNK be given by an equation f(xo, x1, x2) = 0 withcoefficients in K-we will say the curve is over K or defined over K.The idea is to study f = 0 over L and from the study get information onthe curve over K. Below we always take K = reals, L = complexes.
Let f*(xo, x1, X2) = 0 be an algebraic curve in the plane, where f * is
,rye
'-ti
'-«
-0.
ti."I
F
In'
ti,II
I
ti.
CO
D`O
ra+
-
ob.
2,Q
coo
III
ear
.m7
.c''.,,
H'a
m-°
.k.114
+°,
aye
.45'-'
`ti
H.°
'ti.;''d
O".
SEC. 4 QUADRIC SURFACES 215
homogeneous of degree n ; and assume that f* is not divisible by xo.Placing xo =1, xl = x, x2 = y, we get an equation f *(l, x, y) = 0, wheref *(I, x, y) = f (x, y) is a polynomial of degree n in x, y. Conversely, givenany polynomial f (x, y) of degree n, there is, as one easily sees, one andonly one homogeneous polynomial f*(xo, x1, x2) of degree n such thatf *(1, x, y) = f (x, y) ; moreover f* is not divisible by xo. The locif *(xo, X1, X2) = 0 and f (x, y) = 0 are not necessarily the same-usuallyf *(xo, x1i X2) = 0 cuts lco, while f (x, y) = 0 is in the affine portion of theplane-but all the same we refer to f*(xo, x1, x2) = 0 and f (x, y) = 0 asthe same curve : this is justified by the fact that f*(xo, x1, x2) = 0 andf (x, y) = 0 coincide in the affine portion of the plane, and from the factthat we have a standard way of passing from f* to f and from f to f *.
To illustrate, let f = xy - 1. Then f* = xlx2 - xo 2. The locus f * = 0contains just two more points than f =0, namely, (0, 1, 0) and (0, 0, 1).Because we call f = 0 and f * = 0 the same curve, we also call xy =1 aconic.
Consider f=x2+y2-1. Then f*=x12+x22-x02. Over the realfield f = 0 and f* = 0 have the same locus. The locus f* = 0 over thecomplex field is a much larger set than f = 0 over the real field. None-theless, we study f* = 0 over the complex field to get information onf = 0 over the real field.
Consider f=x2+y2+1. Then f*=x12+x22+xo2. Over the com-plex field, both loci are conics. Over the real field, both loci are empty,so neither is a conic.
THEOREM. All the circles in the Euclidean plane cut the line at infinityin the same two points, I, J. Conversely, any conic defined over thereals that passes through I, J is a circle.
PROOF. Every circle has equation of the form x2 + y2 + ax + by +c = 0, or, in homogeneous coordinates, x12 +X2 2+ axlxo + bx2xo + CX02 = 0.Placing x0=0, we get x12+x22=(xl+ix2)(xl-ix2), from which onesees that all circles pass through the point (0, 1, i) and (0, 1, - i). Theseare the points I, J.
Conversely, suppose dx2 + exy + fy2 + ax +Iiy + c = 0 passes throughI, J. Then one finds d + ei +f i2 = 0 and d - ei +fi2 =,0, i.e., d - f + ei = 0and d -f - ei = 0. Adding and subtracting these equations, one findse = 0 and d -f = 0, or d =f. Here d # 0, as otherwise the given equa-tion is not that of a conic. Supposing, as we may, that d = 1, the givenconic has equation x2+y2+ax+by+c=0. This represents a circle ifit is not empty ; and it is not empty since a conic by definition is notempty.
DEFINITION. The lines through a point P joining I, J are called theisotropic lines through P.
ti:...
a"'
°m°
Q'm
......
{7i
w..
its
'tiII
{
m..
mho
ma,
F2'
am,
'.s
>~'
Its
.r"P'''^"
0.'
.C'
F'+1"r
.-.Its
t''"b"
+"'
..,
0-0,v.
II'
c,"
+°'
0°o
,':
216 LECTURES IN PROJECTIVE GEOMETRY CHAP. 13
THEOREM. The cross-ratio that two lines, defined over the reals andmeeting in P, make with the isotropic lines (in one order) is (1- i tan B)/(1+i tan 0), where 0 is the angle between the lines.
PRoop. Take Pas origin and let the lines be y = mlx, y = m2x. Theisotropic lines are y = ix, y = - ix. These lines meet lao at (0, 1, ml),
i(0, 1, m2) (OS 1, i ), (0, 1, - i ). The cross-ratio is ml - 2 /m2 - , whichml+i m2+isimplifies to the expression given in the theorem.
COROLLARY. The angles between lines ll, l2 and ll, l2 are equal if andonly if the cross-ratios between them and the isotropic lines through theirintersections are equal. (If the isotropic lines through P = ll - l2 aretaken in the order P1, PJ, then the isotropic lines through P = l1 l2 areto be taken in the order P1, PJ.)
REMARK. In a systematic linking up of projective with Euclideangeometry, the content of the above theorem can be taken as a basis onwhich to define angle between two lines.
THEoR x. Parallel planes have the same I, J points.
PROOF. Take a circle r in one of the planes. A transformationT : x' = x + a, y' y + b, z' = z + c takes the first plane IT into the otherplane ir' and the circle 1' into a circle I". If we identify the planes 7rand Ir' with their projective extensions, and the transformation T withthe transformation r* : xi = x1 + ax0, x2' = x2 + bxo, x3' = x3 + cx0, thenthe line at infinity of IT goes into the line at infinity in Ir'. HenceI,,, J. go into I, J.,: this assertion would hold for any congruenttransformation T, not merely for those of the special kind being con-sidered. Now we make use of the fact that T, or T* rather, leaves everypoint at infinity fixed. Hence, {I,,, J,}={In Jr,), Q.E.D.
Let S be a sphere: it has equation x2+y2+z2+ax+by+cz+d=0,a, b, c, d real. We regard S as the real part of a locus S given by thesame equation over the complex field. S is a quadric surface (as oneeasily checks). Let P be a point of S. Then P is a point of S, and Shas, according to our discussion of quadrics, a tangent plane at P. Wewant to verify that this tangent plane (or its real part, rather) is whatordinarily would be called the tangent plane in Euclidean geometry.
Take coordinates so that P is at the origin and the center of the sphereis on the z-axis. Then S has equation x2 + y2 + z2 - az = 0. The inter-
section with z = 0 isrx2
+ yz _ O' or, from the point of view of the geo-
metry of the z-plane, simply : x2 + y2 = 0. Over the complex field,x2 + y2 = (x + iy) (x - iy), i.e., the intersection is the set of isotropic lines
r,,,''
mil
0.,2°,
SEC. 4 QUADRIC SURFACES 217
through P, whence z = 0 is the tangent to the sphere in the sense of ourdiscussion on quadrics. We can put the matter thus :
THEOREM. The plane 7r through a point P of a sphere S perpendicularto the radius through P intersects S in the isotropic lines of Tr through P.
Exercise. A plane section of a sphere, if not empty, is a circle.
DEFINITION. Let N, S be diametrically opposite points of a sphere9', and let rr be the tangent plane to .5o at S. Let P be a (variable)point of 9', P :AN. The mapping P -* P' = NP n ,r is called astereographic projection. The point N is called the center of the pro-jection.
THEOREM. A stereographic projection maps circles not through itscenter into circles.
PROOF. Let r be a circle on 9' not through N. Using the definitionof conic, one proves immediately that the projection of r onto ir, thetangent plane at the antipode S of N, is a conic r. It is now a matterof seeing that r, passes through the I, J points of ir. Let r be cut outon . by the plane a. This plane cuts the lines NIA and NJ,. Let rr'be the tangent plane to 91 at N. Then {I JA} = {IA,, so NI NJ,are the isotropic lines of rr' through N, hence lie on the sphere by thelast theorem. Hence, a n NIA lies on r, as does a n NJ,. Hence theprojections onto 7r of these two points he on the projection of r, whencer, passes through IA, J, and so is a circle. Q.E.D.
THEOREM. A stereographic projection from a sphere . to a plane itmaps the isotropic lines through any point P of the tangent plane at Pinto the isotropic lines through P' of the plane a,'where P' is the imageof P.
PROOF. If one designates by r the pair of isotropic lines at P, andtheir projection in IT by r,, the proof of the present theorem is just likethe proof of the last theorem.
Exercise. By the angle between two curves (say circles) on a sphere .9' at apoint of intersection P of the curves one means the angle between the tangentsto the curves at P. A similar definition holds for plane curves. Prove thatstereographic projection preserves angles.
f"+
CHAPTER XIV
THE JORDAN CANONICAL FORM
Let- A be an (n + 1) x (n + 1) nonsingular matrix defining a lineartransformation x - y = Ax in a projective n-space S over the complexfield K. If x' = Bx is a change of coordinates, then x' y' = By =BAx BAB-lx', so that in the new coordinate system the transforma-tion is effected by the matrix BAB-'. By varying B, the matrixBAB-' can be given various, and hence simple, forms ; and from theforms various information on the transformation can be read off.
By a fixed splice of a linear transformation T one means a subspaceF of S such that T(P) is in F for every point P of F. Suppose S canbe written as the join of two fixed spaces F, G that are skew to eachother. Then dim F+dim G=n-1. Let dim F=r, dim G=n-r-1.Let Po, , Pr be a basis for F; Pr+1, P. a basis for G. Choose acoordinate system such that
1 0
0 1
Po : 0
( ) P1:0 , etc.
( )0 0
and let T be effected by A in this coordinate system. The pointsPr+1, , P. go into points of G, hence into points whose first r + 1coordinates are zero ; and since the images of Pr+1, - , P, are given bythe (r + 1)th, , nth columns of A, we conclude that the first r + 1 rowsof the last n - r columns of A are all zeros. Similarly the last n - r rowsof the first r + 1 columns are all zeros. Schematically A has the follow-ing appearance:
r+1 x-r
n±r ( )The transformation T induces a linear transformation on F, and in factthis is given, as one easily sees, by the matrix C in a coordinate system
218
'N`
iii'
.'7.
PO
P
tea,
car'
SEO. 1 THE JORDAN CANONICAL FORM 219
having PO, , Pr as its vertices ; and similarly for G and D. Thestudy of A thus reduces to the study of two smaller matrices, C and D.
Referring to the above situation, we say "A has the blocks C, Dalong the diagonal and zeros elsewhere." Note that by a change of thesubscripts on the Pt, the positions of C and D can be interchanged.
We write 0 = F1 + F2 + + Ft if each Ft is a fixed space of A andis skew to the join of the other F f : and we say that 0 is the direct sumof F 1 ,--- , Ft. If a fixed space F can be written as F1 + F2, withF1, F2 nonempty, then F is called reducible; otherwise it is calledirreducible. [N.B. All definitions are with respect to a given matrix Aor the corresponding transformation T.]
If G=F1+ +Ft and Ft=Ft'+Ft", then0 = F1+ - +Ft-1+Ft'+Ft".
as one easily checks. To simplify A, then, we first write S as a directsum of irreducible spaces : this gives A the form of a number of blocksalong the diagonal with zeros elsewhere ; and the problem reduces tosimplifying the appearance of the blocks, which operate on irreduciblespaces.
Now we get some information 6n the fixed spaces.
TnEoREM. Every linear transformation has a fixed point; and, dually,a fixed hyperplane.
PRooP. We have to see that there is an x such that Ax = Ax forsome A. This is the same as saying that (A - AE)x = 0 for some A.And this system will have a solution x(# 0) if det (A - AE) = 0. Sincewe are supposing K to be the complex field, the Fundamental Theoremof Algebra assures us of a solution of the equation det (A - AE) = 0; andhence of an x and A such that Ax = Ax.
ConoLLARY. Every fixed k-space contains a fixed (k - 1)-space.
The polynomial det (A - AE) is called the characteristic. polynomialof A. Note that BAB-1 has the same characteristic polynomial, since
BAB-1- AE = BAB-1- ABEB-1 = B(A - AE)B-'1,
and, applying the rule det UV= det U. det V,det (BAB-1- AE) = det B det (A - AE) det B-1
= det (A - AE) det(B B-1) = det (A - AE).Thus, in changing coordinate systems we do not change the characteris-tic polynomial.
A root of det (A - AE) = 0 is called a characteristic root. If Ax = Ax,then A is called the associated characteristic root of the fixed point x.To each fixed point there is associated one and only one characteristic

CD
.
pip
r.,
0R,
...
'gyQ,°
'^"
C".
°'o
220 LECTURES IN PROJECTIVE GEOMETRY CHAP. 14
root. The characteristic roots are necessarily distinct from zero sincedet A, the constant term in det (A - AE), is different from zero.
TauoaEni. The characteristic roots of A-1 are the reciprocals of thecharacteristic roots of A.
PROOF. Let det (A-1- µE) = 0. Then p 0 and
11 x+1 det A det (A-1- µE) = det E - A)
so 1/µ is a characteristic root of A. Similarly, the reciprocal of a charac-teristic root of A is a characteristic root of A-1
If x - y = Ax, then the induced transformation on the hyperplanesis u v = uA-1.
THEOREM. If T has at least two fixed points, then it has at least twofixed hyperplanes; and conversely by duality.
PROOF. If A has two distinct characteristic roots, then also A-1 hastwo distinct characteristic roots, and these yield distinct associatedhyperplanes. Assume, then, that A has only one characteristic root,AO. Then (A - AoE)x = 0 has at least two linearly independent- solu-tions. This conclusion can be translated into a statement on the rankof A - AoE (namely, rank (A - AoE) <_ n - 1). Recall that, for anyappropriate matrices U, V, rank UV <_ rank V, and hence in particularthat, if U is square and det U0 0, then rank UV=rank V. Hencerank(A - AoE) = rank (A-1- Ao-'E), and we get in turn two linearly inde-pendent solutions to u(A-1- Ao-'E) = 0.
We next want to prove that an irreducible subspace has only onefixed point, but for purposes of induction we make a slightly strongerstatement.
THEOREM. If S has more than one fixed point, then it is reducible.Moreover if P is a fixed point, then S can be written as S = F 1 + Fziwith F, containing P.PROOF. Let Q be a second fixed point. By the previous theorem
there are two distinct fixed hyperplanes g, h. If one of g, h does notpass through P, say g does not, then P + g is a desired decomposition.Thus we may suppose both g, h pass through P. If now one does notpass through Q, say g, then Q + g is a desired decomposition. Thus wemay suppose both g, h pass through P and Q.
Consider now the space S' of lines through P, i.e., a point of S' is aline of S through P, and a line of S' Is a plane of S through P. If S isn-dimensional, then S' is (n-1)-dimensional : we are going to make aninduction on n. The spaces g, h represent for S' two hyperplanes. Thetransformation T induces in S' a linear transformation, and g and h are
GC
sm
CD
III
".4
Cry
......
BO
O
fir,
coo
Cs' .!xa
m
m'om
'"
0"C
(3a-00
'..
81Ma. 1 THE JORDAN CANONICAL FORM 221
fixed in this transformation. Hence S' has two fixed points (one ofwhich is the line PQ), and so, by induction on n, S' is the direct sum oftwo spaces, F1', P2', one of which, say F1', contains PQ. Thus S'=Fl' + F2'. In terms of S, one can say that S is the join of two fixedspaces F1, F2 with P, Q in F1 and F1 n F2 = P.
In F1, the transformation T induces a linear transformation havingP, Q as fixed points, hence by induction F1= F3 + F4i with P in F2.Applying the rule dim L + dim M = dim (L n M) + dim [L, M], oneshows that F4 is skew to the join [F2, F21. Hence S= [F2, F2] +F4,and the proof is complete.
We now study A under the assumption that S is irreducible for A.Since S is irreducible, there is only one fixed point, F0, and hence only
one fixed hyperplane Fn_1. The transformation induced in by Thas only Fo as fixed point ; therefore in there is only one fixed(n-2)-space F.-2; etc. Thus for each k there is one and only onefixed k-space Fz ; and S contains which contains whichcontains Fo.
Take vertices E0, E1, , E. of a coordinate system as follows.Let Eo = Fo ; E1 any other point in Fl ; E2, any point in F2 not colli-near with EoE1i etc. Consider the appearance of A in this coordinatesystem. Since Bo goes into itself, the first column of A must be zerosexcept for the first element ; since E1 goes into a linear combination of
1 010 1
0 and 0
0 (0)the second column of A consists of zeros below the second element ; etc.In this way one sees that A has zeros below the main diagonal. Sucha matrix is called triangular. If Ao, , A. are the diagonal elements,then n(At - A) is the characteristic polynomial, hence the elements inthe diagonal are the characteristic roots; and since there is only onecharacteristic root, A is triangular with equal elements in the diagonal.
Now we are going to show that, by an appropriate choice of thevertices Eo, , E. and unit point 0, A can be made to take the form
i.e., the characteristic root Al of A down the main diagonal, ones alongthe diagonal just above it, and zeros elsewhere. This is the so-called
CD
R
`rte
CID
'.7
ion
`.4
Era
222 LECTURES IN PROJECTIVE GEOMETRY Ca". 14
Jordan canonical form for an irreducible matrix (i.e., S is irreducibleunder TA).
Let Eo, E1, , E. be taken as above. Then T induces a transfor-mation on F,_1 given by a matrix B, where B is obtained from A bydeleting the last row and last column of A. By induction on n we maysuppose vertices E0, , E,_1 and unit point G' taken so that B is inJordan canonical form. Only the last column of A will perhaps notnow be in the desired form, and we will show that it takes the desiredform upon appropriate choice of the unit point of the coordinate system.
Note that has equation x = 0. We take E. arbitrarily not inx = 0. That this can be done is an additional assertion, but we assertit and make it part of our induction. Let E = T (En). Then E O Es'.The line cuts x = 0 in a point V. The point V could not be in
otherwise the join of E. and would be a fixed hyperplanedifferent from F.-I, and there is only one fixed hyperplane. By induc-tion, then, we may suppose V = En_1.
We have0 0 1
1
E.: 0 E'_1 10 G':
0 1
1 0 0
We can choose
1
G: 1
1
a r b i t r a r i l y on E Gri , except that 0 0 ' , G o E,a. Let
H:
Then HG meets in
K:
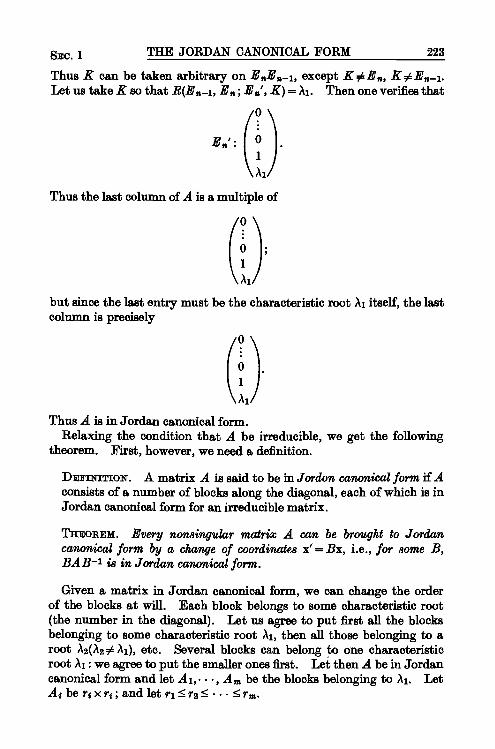
coo
Cs'
`cm
coo
a'.
coo
'ti
SEC. 1 THE JORDAN CANONICAL FORM 223
Thus K can be taken arbitrary on except K O En, K #Let us take K so that B(En_1i E.; E,;, K) = A1. Then one verifies that
0
Eri: 0
1
Al
Thus the last column of A is a multiple of
0
0 1;
1
Al
but since the last entry must be the characteristic root Al itself, the lastcolumn is precisely
Thus A is in Jordan canonical form.Relaxing the condition that A be irreducible, we get the following
theorem. First, however, we need a definition.
DEFINITION. A matrix A is said to be in Jordon canonical form if Aconsists of a number of blocks along the diagonal, each of which is inJordan canonical form for an irreducible matrix.
THEOREM. Every nonsingular matrix A can be brought to Jordancanonical form by a change of coordinates x' = Bx, i.e., for some B,BAB-' is in Jordan canonical form.
Given a matrix in Jordan canonical form, we can change the orderof the blocks at will. Each block belongs to some characteristic root(the number in the diagonal). Let us agree to put first all the blocksbelonging to some characteristic root A,, then all those belonging to aroot A2(A20A1), etc. Several blocks can belong to one characteristicroot Al : we agree to put the smaller ones first. Let then A be in Jordancanonical form and let A1,- -,A. be the blocks belonging to Al. LetA{ be rsxrj;and let rl<_r2<_---<r,,.
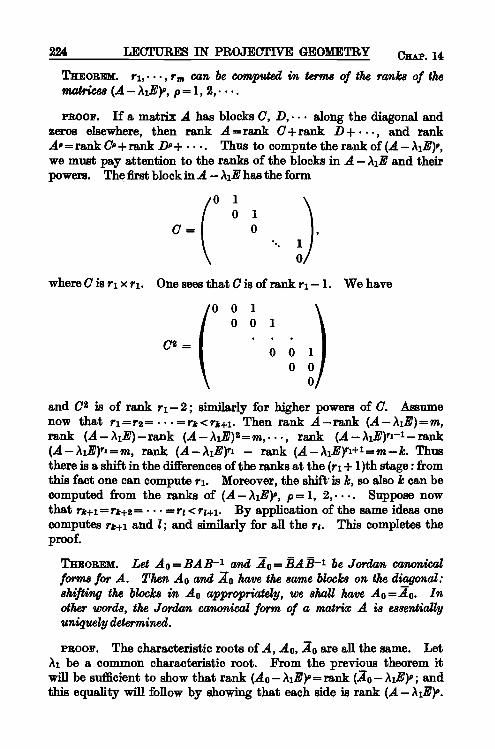
ti,
09114.
.4im
oo
III
224 LECTURES IN PROJECTIVE GEOMETRY CH". 14TRFOREM. ri, , r,x can be computed in terms of the ranks of them a t r i c e s (A - )k1E)P, p =1, 2, .
PROOF. If a matrix A has blocks C, D, along the diagonal andz e r o s elsewhere, then rank A = rank C + rank D + , and rankAP = rank CP +rank DP+ . Thus to compute the rank of (A - AE)P,we must pay attention to the ranks of the blocks in A - A1E and theirpowers. The first block in A - A1E has the form
C=
1
0 1
0
where C is rl x ri. One sees that C is of rank rl - 1. We have
0 0 1
0 0 1
C2 =0 0 1
0 0
0
and 02 is of rank r l - 2 ; similarly for higher powers of C. Assumenow that rl = r2 _ = rk < rk+1. Then rank A - rank (A - A1E) = m,rank (A - A1E) -rank (A - A1E) 2 = m, . , rank (A - A1E)rl-l _ rank(A - )klE)r1= m, rank (A - AE)rl - rank (A - A1E)r1+1= m - k. Thusthere is a shift in the differences of the ranks at the (rl + 1)th stage : fromthis fact one can compute rl. Moreover, the shift- is k, so also k can becomputed from the ranks of (A - AiE)P, p =1, 2,. .. Suppose nowthat rk+1= rk+8 = = r= < r=+i. By application of the same ideas onecomputes rk+l and l ; and similarly for all the r{. This completes theproof.
THEOREM. Let Ao = BAB-1 and Ao = BAB-' be Jordan canonicalforms for A. Then A0 and Ao have the same blocks on the diagonal:shifting the blocks in Ao appropriately, we shall have Ao=Ao. Inother words, the Jordan canonical form of a matrix A is essentiallyuniquely determined.
PROOF. The characteristic roots of A, A0, Ao are all the same. LetAl be a common characteristic root. From the previous theorem itwill be sufficient to show that rank (Ao - AlE)P =rank (Ao - A1E)P ; andthis equality will follow by showing that each side is rank (A - AlE)P.
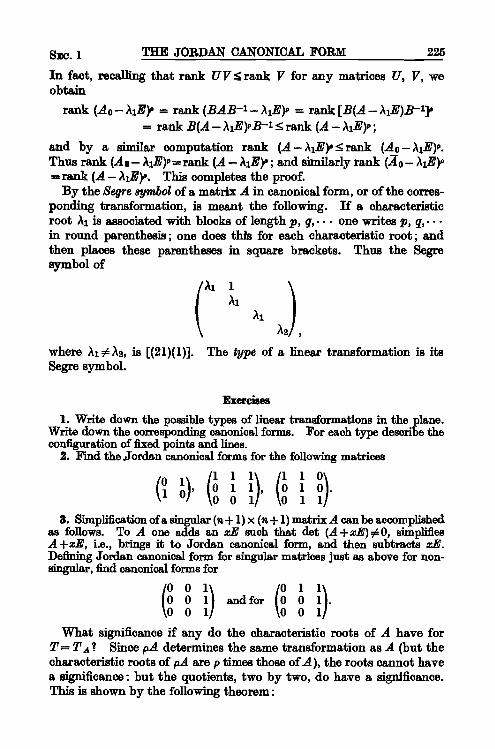
mm.
t/1
-400
Sxc. 1 THE JORDAN CANONICAL FORM 225
In fact, recalling that rank UV 4 rank V for any matrices U, V, weobtain
rank (Ao - AiE)P = rank (BAB-1- A1E)P = rank [B(A - AiE)B-1]P= rank B(A - A1E)PB-15 rank (A - AlE),,;
and by a similar computation rank (A - A1E)P 5 rank (A o - A1E)P.Thus rank (A o - A1E)P = rank (A - AiE)P ; and similarly rank (Ao - A1E)P= rank (A - AlE),,. This completes the proof.
By the Segre symbol of a matrix A in canonical form, or of the corres-ponding transformation, is meant the following. If a characteristicroot Al is associated with blocks of length p, q, one writes p, q,in round parenthesis ; one does this for each characteristic root ; andthen places these parentheses in square brackets. Thus the Segresymbol of
Al
As,
where Al O As, is [(21)(1)]. The type of a linear transformation is itsSegre symbol.
Exercises
1. Write down the possible types of linear transformations in the plane.Write down the corresponding canonical forms. For each type describe theconfiguration of fixed points and lines.
2. Find the.Jordan canonical forms for the following matrices
/0 11
1 0' (01 (0 1
0 0 10 1 1)
3. Simplification of a singular (n + 1) x (n + 1) matrix A can be accomplishedas follows. To A one adds an xE such that det (A+xE) #0, simplifiesA +xE, i.e., brings it to Jordan canonical form, and then subtracts xE.Defining Jordan canonical form for singular matrices just as above for non-singular, find canonical forms for
0 0 1 0 1 10 0 ll and for (0 0 11.0 0 1/ \0 0 1
What significance if any do the characteristic roots of A have forT = T A ? Since pA determines the same transformation as A (but thecharacteristic roots of pA are p times those of A), the roots cannot havea significance : but the quotients, two by two, do have a significance.This is shown by the following theorem :
I»;
ado
"`l
Kr"
try
'.b
"°D
aim
!'din
"
cue
lye6z'
P,_
.3'q_'
,ti
q;;pp,,
:t:1:!
226 LECTURES IN PROJECTIVE GEOMETRY Cur. 14THEOREM. Let P, Q be distinct fixed points for A and let A, µ be thecorresponding associated characteristic roots. Let S be a third pointon PQ and let A : S ->S'. Then R(P, Q ; S, S') = A/µ.
.PROOF. Let P : x, Q : y. Then Ax=Ax, Ay.= µy. Let x, y be chosenso that S:x+y. Then A(x+y)=Ax+l,y and R(P, Q; S, S')=1111µ1A=A/p. Q.E.D.
Exercises
1. Let S = F+ F' be a decomposition of space for a transformation T.Let P, Q be fixed points of F, F, respectively. Let U be a point on PQ andT: U -->V. Then. T is uniquely determined by the transformations inducedin F and in Fand by R(P,Q; U,V).
2. For each type of linear transformation in the plane describe the con-figuration of fixed points and lines.
3. Use the theorem developed above to show that every involution I onthe line different from the identity is given in some coordinate system by thematrix (0 _ 01) ; hence, that it has two distinct fixed points P, Q ; and thatif I : U V, then U, V separate P, Q harmonically.
BIBLIOGRAPHICAL NOTE
An excellent work on projective geometry is O. Veblen and J. W. Young,Projective Geometry, 2 vols., Boston (1910, 1918). See especially Volume 11for a systematic linking up on an axiomatic basis of Euclidean (and non-Euclidean) geometry with projective geometry.
For non-Euclidean geometry, see H. Busemann and P. J. Kelly, ProjectiveGeometry and Projective Metrics, New York (1953).
For projective geometry without Desargues' Theorem, see M. Hall, Jr.,Projective Planes and Related Topics, California Institute of Technology(1954); and his book The Theory of Groups, New York (1959), especiallypp. 346-420. See also G. Pickert, Projective Ebenen, Berlin (1955), whichcontains an extensive bibliography.
On the introduction of coordinates, see E. Artin, Geometric Algebra, NewYork (1957).
For a development of geometry on an axiomatic, but not projective, basis,see D. Hilbert, Grundlagen der Geometrie, 7th ed., Berlin (1930). In Englishtranslation there is only the first edition of this work : Foundations of Geo-metry, Illinois (1938).
Once Desargues' Theorem is assumed, a field K makes its appearance andthe powerful methods of linear algebra are available. For this, see R. Baer,Linear Algebra and Projective Geometry, New York (1952).
To some extent nonlinear geometry can be studied over a noncommutativefield. For example, B. Segre, "Elementi di geometria non lineare sopra unoorpo sghembo," Rend. Circ. Mat. Palermo, Vol. 7 (1958), pp. 81-122, definesa quadric surface as the set of points swept out by the lines (called generators)which meet three mutually skew lines in 3-space, and a conic to be the inter-section of a quadric with a plane not through a generator. For the most part,
'ti
Cm
` rim
',-.FSINo. 1 THE JORDAN CANONICAL FORM 227
however, the commutativity of K is essential in nonlinear algebro-geometricdevelopments.
With K commutative, one is on the road to algebraic geometry. For anelementary text which continues the study of algebraic curves and surfacesto those of order three, see J. G. Semple and G. T. Kneebone, AlgebraicProjective Geometry, Oxford (1952).
For algebraic curves, see R. J. Walker, Algebraic Curves, Princeton (1950).For algebraic varieties of arbitrary dimension, an excellent textbook isB. L. van der Waerden's, Einfiihrung in die algebraische Geometric, New York(1945). See also W. V. D. lodge and D. Pedoe, Methods of Algebraic Geo-metry, 3 vols., Cambridge (1954) ; S. Lang, Introduction to Algebraic Geometry,New York (1958); S. Lefschetz, Algebraic Geometry, Princeton (1953);J. G. Semple and L. Roth, Introduction to Algebraic Geometry, Oxford (1949).
Algebraic geometry is closely associated with commutative algebra. Forthis, see O. Zariski and P. Samuel, Commutative Algebra, Vols. 1 and 2,D. Van Nostrand Co., Inc., Princeton, N.J. (1958, 1960).
For the geometric derivation of the Jordan canonical form, see St. Cohn-Vossen, Mathematieche Annalen, Vol. 115 (1939), pp. 80-86. For analgebraic derivation, see B. L. van der Waerden, Modern Algebra, Vol. 2,pp. 119-122, New York (1950).
OH
O
M`"
rob
-.w
0,m
amp
umb
em.
m..
.20
.7'
ed'JC
L0.X
0+S °"'
o-c
F.'
41-0>
O.
d,°3
.q.
INDEX
Affine line, 31Affine plane, 31, 52Affine space, 162Affine 3-space, 103Algebraic curve, 172Alias transformation, 153Alibi transformation, 153Analytic model, 72, 137ANK-(= AK-), 163Associativity, 68 f.Automorphism, 121, 167Axially perspective, 9Axioms, 42
of alignment, 43, 56, 96, 117, 126Axis, 47Basis, 124Betweenness, 7Bezout's Theorem, 204Bounded figure, 6Boundedness, 6Brianchon's Theorem, 120Center, of a perspectivity, 12, 47
of a projection, 3Centrally perspective, 9Characteristic root, 219Class, 37, 140, 142Collineation, 64, 121Commutativity, 68 f., 82Complete 4-line, 63Complete quadrangle or 4-point, 17, 117Configuration, 65Confined, 65Conics, 106 if., 177 if.
degenerate, 115, 203point conic, 120line conic, 120
Conjugate, 121Consistency, 49 if., 71Coordinates, 34, 36, 68 if., 73, 143, 162,
165, 208on a conic, 197 if.
Coordinate systems, 141 if., 165 if.Correlation, 121Cross-ratio, 21 if., 27 if., 159Dependent, 123, 126, 142Desargues' Theorem, 9, 56, 60 if., 75, 88,
89,102Determinant, 150
Diagonal point, 17Dimension, 129Direction, 8Distributivity, 69, 81Division of a segment in a ratio, 8Duality, 43, 46, 134 if.Equivalent, 124, 141, 183Euclidean plane, 31Exchange Axiom, 122Exchange Theorem, 124Field, 68 if.Fixed space, 218Four-line, 63Four-point, 17, 117Fourth harmonic, 15, 17Free plane, 65Fundamental Theorem, 25, 89, 94, 95Generate, 129Geometric object, 170Harmonic tetrad, 15, 19, 20 f., 28, 116Higher-dimensional space, 96 if., 122 if.Homogeneous coordinates, 36Hyperplane, 133Ideal points, 31Identity Axiom, 122Image, 3Incidence, 55Independence, 53 if.Independent, 123, 142Inner product, 145Intersection multiplicity, 204Involution, 121, 201Irreducible space, 219Isomorphism, 55Isotropic lines, 215Join, of two points, 4
of two spaces, 129Jordan canonical form, 218 if.Left multiplication, 82Linear dependence, 142Linear equations, 38Linear transformations, 141 if., 153, 155,
160, 163Matrix, 145Model, 49, 51, 72Mystic hexagon, 111Neutral element, 69, 71Noncommutative, 69, 86 if.
229
;J.
m».
.+.
+t+
bye
°'p
m$'
f+-
000
QO
Mgy
p.
(D=
DE
W
cm.
w'~
m00
..a .-.tim
w
co.
F-4
.-.23r
p+'
OE
Mti^e"
rm.
+»V
M..
c.,cam
,cam
.P60
230 INDEX
Notation, for a conic, 112for a cross-ratio, 22for a harmonic tetrad, 17for the intersection of two spaces, 129for the join of two spaces, 129for an n-space over a field, 137for a perspectivity, 12for a projectivity, 13for a quadrangular hexed, 60for a quadric surface, 210for a 3-space, 137
Onto, 154Opposite sides, of a complete qua-
drangle, 17of a hexagon, 110
Orientation, 8, 22Pappus' Theorem, 11, 26, 56, 76, 82, 88,
89Partial plane, 65Pascal's Theorem, 110Pasch's Axiom, 96Pencil, of lines, 31
of conics, 203of planes, 208
Perspective, 9Perspectivity, 12, 46, 47 f., 161, 197, 208PNK (= PNK2), 165PNK" (= PK°), 102, 137
right, 139left, 139
Point triple, 60Polar, 115 if., 184Polarity, 121, 190Pole, 119, 184Polynomial, 172Polynomial equation, 172Product of transformations, 13Projection, 3Projective invariants, 3 if.Projective line, 31Projective plane, 30, 34, 43, 56, 97Projective theorems, 1, 11, 18Projectivity, 12, 46, 157, 158, 197, 208Quadrangular hexad, 60Quadric surfaces, 208 if.Range, 47
Rank, 125, 140Regulus, 210Representative, 36, 73, 141Right multiplication, 82Scalar product, 145Segment, 7Segre symbol, 225Self-conjugate, 121Self-dual, 44, 196Semilinear, 169Solvability, 68, 69Space, 128
3-dimensional, 96 if.4-dimensional, 102
Span, 129Sphere, 214Stereographic projection, 217Symmetric, 187System of type E, 55Tangent, 7, 106, 115, 211Theorem A, 25, 89, 95Theory of Dependence, 122Three-space, 96, 100Transformation, 12 f.
incidence-preserving, 155
linear, 153, 155, 157 if., 162, 163nonsingular, 153one-to-one, 153onto, 154semilinear, 169singular, 153univalent, 153
Transpose, 151Triangle, 17
triple, 60Trivial solution, 36Type of a linear transformation, 225Undefined terms, 42, 43Unit point, 144, 156Unproved propositions, 42, 43Vanishing line, 5Vanishing points, 4Vector space, 163Vertices of a complete 4-point, 17
of a coordinate system, 144, 156Zero, 70
A CATALOG OF SELECTEDDOVER BOOKS
IN SCIENCE AND MATHEMATICS