Embed Size (px)
Citation preview

Sense and Avoid (SAA) Sense and Avoid (SAA) T h l i f U dT h l i f U dTechnologies for Unmanned Technologies for Unmanned
Aircraft (UA)Aircraft (UA)Aircraft (UA)Aircraft (UA)
National Cheng Kung University4 December 2008ece be 008
Dr. Won-Zon Chen
1

Outline
• Sense and Avoid (SAA) background and needSense and Avoid (SAA) background and need• SAA technology overview
– SAA architectureSAA architecture– Sensor suite– Sensor data fusion– Autonomous collision avoidance
• SAA flight test• Hardware-in-the-loop (HWIL) lab
2

Presentation ReferencesPresentation References
• “A Real-time Electro-Optical (EO) Sensor System Simulator for• A Real-time Electro-Optical (EO) Sensor System Simulator for Unmanned Vehicle SAA Development,” AUVSI Conference, San Diego, CA, June 2008
• “Sense and Avoid Flight Test (SAAFT) and Lessons Learned,” AIAA InfoTech Conference, Rohnert Park, CA, May 2007
• “SAA and TCAS Integration for Unmanned Aerial System (UAS),” AIAA S a d C S teg at o o U a ed e a Syste (U S),InfoTech Conference, Rohnert Park, CA, May 2007
• “SeFAR Integration Test Bed for SAA Technologies,” AIAA InfoTech Conference Washington D C September 2005Conference, Washington, D.C., September 2005
• SAA video, AFRL 2006
3

SAA Background and Needg
Unmanned Aircraft (UA) must meet or exceed “equivalent level of safet ” (ELOS) to ha e ro tine access to the NAS and be able tosafety” (ELOS) to have routine access to the NAS and be able to integrate with existing processes and procedures These are four layers involved in achieving air traffic separation
Procedural
Air TrafficManagementAir Traffic
ManagementConflictAvoidance
Onboard Collision Avoidance System
Pilot See and AvoidCollisionAvoidance
Sense and Avoid for UAV
4

SAA Challengesg
Must meet or exceed equivalent level of safety (ELOS)M t b li ht i ht ll i l d ff d blMust be light weight, small size, low power, and affordableMust comply/compatible with existing infrastructureMust meet UAV unique ConOps and flying characteristics q p y g
Low maneuverability and speedData link latency and reliabilityGround pilot situation awareness
Cooperative
Non-Cooperative
SAAFT Objective: In-flight demonstration of autonomous detect and
5
SAAFT Objective: In flight demonstration of autonomous detect and autonomous avoid for cooperative and non-cooperative intruder aircraft

Maturing SAA in StepsNGC SAA Integration Lab
• TCAS + ADS-B + EO + Radar Simulators• Real-time Closed-loop Simulation up to 10
Intruder Aircraft
SAA Flight Test (SAAFT)Surrogate Programmed to Fly Like Global• Surrogate Programmed to Fly Like Global Hawk
• Autonomous Avoidance with TCAS + EO• 3 Rounds of Flight Test from Oct 2006 to
Jan 2007Jan 2007Multiple Intruder Autonomous Avoidance (MIAA)
• Autonomous Avoidance with EO + Radar + TCAS + ADS-B
• 2008 - 2009
P d iProduction Transition
6 Algorithm and Software Development

AFRL SAA VideoAFRL SAA Video
0603111 See & Avoid (REVIEW) mpg0603111 See & Avoid (REVIEW).mpg
7

Outline
• Sense and Avoid (SAA) background and need• Sense and Avoid (SAA) background and need• SAA technology overview
– SAA architectureSAA architecture– Sensor suite– Sensor data fusion– Autonomous collision avoidance
• SAA flight test• Hardware-in-the-loop (HWIL) lab
8

SAA Architecture
Sensors Data Fusion AutonomousAvoidance
9

Traffic Collision Alert System (TCAS)y ( )
• Developed in late 1980s after mid-air collision at Los Angeles
• TCAS provides two primary functions– Surveillance
• Interrogates transponder equipped vehicles• Filters and tracks transponder responses to provide vehicle position and
velocity information– Traffic advisories
• Uses track data to estimate threats Traffic alert (TA)• Recommends pilot action Resolution alert (RA)
• Pilot Has Ultimate Responsibility To Respond To ThreatsThreats– TCAS I: TA only– TCAS II: TA and RA
10

TCAS II Block DiagramgDirectional Antenna
Radar Altitude
PressureAltitude
TCAS PMode-S
Transponder
(top)Altitude Altitude
TCAS Processor Transponder
TCAS
RA Display
Control Panel
RA
Omni DirectionalAntenna
Aural Annunciation
Traffic DisplayDisplay(bottom)Traffic Display
11

TCAS II Operational Descriptionp p
TCAS Goal to OptimizeVertical Separation atVertical Separation at
Closest Point of Approach
Time to Closest Point of ApproachTime to Closest Point of Approach~ 40 Seconds (Traffic Advisory)
Time to Closest Point of Approach~ 25 Seconds (Resolution Advisory)
12

Automatic Dependent Surveillance -Broadcast (ADS-B)Broadcast (ADS B)
• Broadcast ownship position to provide air traffic controller-like situational awareness
• Include vehicle position, altitude, and intent in data message• Long range and improved accuracy • Rebroadcast via ground station• Include ground Radar information in rebroadcast data message
• Provide other possible applicationsProvide other possible applications• Weather information• Terrain information
C tl th iGarmin’s UAT
• Currently three versions • Universal Access Transceiver (978 MHz)• Mode-S (1090 MHz)
VDL VHF– VDL – VHF• Asia and Europe Only
13

ADS-B Ground Station
ADS-B
ADS-B, TIS-B,
ADS-B
ADS B, TIS B, FIS-B
FISFIS Sources
UATTx/Rx
GroundStationsFIS
ADS-BSurveillance
Systems
FIS-BGround BroadcastServer(s)
ADS B
TIS-BSurveillance ProcessingSystems
Radars
ADS-B
Flight Following
TargetReports
Processing
14
Control Facility (WJHTC) (Limited)TargetReports

ADS-B/TIS-B : Principle of Operations
Class A Airspacep
Transponder N T d
PrimaryRadar
TransponderEquippedAircraft
Non-TransponderEquippedAircraft
RebroadcastEquipment
RebroadcastEquipment
TransponderEquippedNon-Transponder
E i dTransponder
EquippedAircraft
q ppAircraftEquipped
AircraftPrimaryRadar
15100nmi

EO Sensor System
• Automatic traffic detection and tracking via advanced image processing
16

EO Calibration
• Significant optics Radial Distortion
0 8
distortion due to wide camera FOVs
• The intrinsic camera 0.4
0.5
0.6
0.7
0.8
r [D
eg]
Camera1Camera2The intrinsic camera
calibration process computes
Focal Length-0.1
0
0.1
0.2
0.3
0 10 20 30 40 50
Erro
r
Camera3
– Focal Length– Principal Point – Skew Coefficient
R di l & T ti l
Azimuth [Deg]
– Radial & Tangential Distortion
• Line-of-Sight angles t d f i lcorrected from pixel
measurements via distortion map
17

ICX’s AI-130 RadarICX s AI 130 Radar
Performance• Frequency: ~ 35 GHz• Frequency: ~ 35 GHz• Detection Range: ~ 6 nmi• Azimuth Coverage: ± 85 deg• Elevation Coverage: ± 10 degElevation Coverage: ± 10 deg• Scan Rate: 120 deg/sec• Range Resolution: < 5 metersPhysicaly• Antenna Diameter: 11”• Weight: 55 lb• Power: 250
W 28 dW, 28 vdc• Environmental: -40 to +70 C• Altitude: up to 20 kftCostCost• ~ $ 170K
18A new SAA radar is being developed

Sensor Data IntegrationSensor Data IntegrationSensor Data IntegrationSensor Data Integration
Data IntegrationgFault
Detection & Isolation
Track Mgmt
Sensor Data
Fused Tracks& Isolation
Data Assoc
Data Fusion
LAPEOi
Track-EO
fusion
Track files
Track
LAPEOi
Track-EO
fusion
Track files
TrackGlobal Tracks
LAPTCASj
Track-TCAS
Track files
LAPTrack
to Track Fusion
Global Tracks
LAPTCASj
Track-TCAS
Track files
LAPTrack
to Track Fusion
19
j
fusionj
fusion

Collision Avoidance: Concept of Operation
Intruder
p p
LOSRate
Jointly OptimalPaRCA
Trajectory---
Intruder4-D Tube
AutoACASTrajectories
Trajectory
+++
---
LOS
4 D Tube
ATC Corridor ++
+++
Vector
Passive RangingAcceleration
+
Bootstrapmaneuver
20Ownship

Constrained Optimization for Collision Avoidance
Stepwise Constraint Relaxation
Avoidance
“SAA system selects appropriate response for situation”
p
ATC • ATC clearances can be recoordinated
Mi i t i t t tManeuver limits (comm, sensor, etc.)
• Mission constraints are next to go
• RoW rules obeyed until last FARs & Right of Way rules
yinstant
• Ultimately, only the limits of the airframe are observed in orderManeuver limits (airframe) airframe are observed in order to save the aircraft
21
Achieving “Equivalent Level of Behavior” to Manned A/C

Outline
• Sense and Avoid (SAA) background and need( ) g• SAA technology overview
– SAA architecture– Sensor suite– Sensor data fusion
A t lli i id– Autonomous collision avoidance
• SAA flight testH d i th l (HWIL) l b• Hardware-in-the-loop (HWIL) lab
22

SAAFT Flight Test in December 2006 g
• SAA host Learjet configuration– Electro optical (EO) and – Traffic Collision Avoidance System (TCAS) sensors
TCAS Display
RLGINSTCAS
TCASAntenna
VSS
RLG
CCDCCD
INS
CCD2CCD2
Detector
Detector
TrackingProcessing
PaRCAHost
VSS(GH-Like
Response)
SAA
CCD1CCD1
DetectorCCD3CCD3
SAAMonitor
DAAMonitor
GPS
23
5NP45-009

Surrogate UAS – Learjet In-Flight Simulator
• Owned/operated by Calspan• FAA registered as experimentalFAA registered as experimental• Four degree-of-freedom in-flight
simulation– Pitch, roll, yaw, thrust
Programmed to fly like HALE
EO Radome
• Programmed to fly like HALE
EO Radome
IR Radome
24

MIAA Flight Test in 2008/2009g
TCAS DisplayTCAS Display
TCAS
p y
TCASAntenna
RLGINSTCAS
p y
TCASAntenna
RLGINS
Detector
TrackingPaRCA
Host
VSS(GH-Like
Response)
CCD1CCD1 Detector
TrackingPaRCA
Host
VSS(GH-Like
Response)
CCD1CCD1
CCD2CCD2Detector
Detector
gProcessing
CD3CD3
SAAMonitor
DAAMonitor
GPS
CCD2CCD2Detector
Detector
gProcessing
CD3CD3
SAAMonitor
DAAMonitor
GPS
5NP45-009
CCD3CCD3
5NP45-009
CCD3CCD3
RadarRadarRADAR
ADS-BA tADS-BA t ADS-B
AntennaAntennaRADAR
25
AntennaAntenna ADS B

MIAA Round 1 Successfully Completed in MIAA Round 1 Successfully Completed in May 2008May 2008May 2008 May 2008
One week long flight test for EO and Radar performance characterization: 20+ test points in various encounter geometries and atmospheric20 test points in various encounter geometries and atmospheric conditions
Three EO Cameras
EO and RadarCameras
MISTY
100 Mi
MISTY MOA
30 M
i Restricted
(Approximation) Finished InstallationMISTY
MOA Test Site
Installation on
Calspan Learjet
26

FAA Supportpp
• FAA provided the SAAFT program: TSPI & ADS-BTSPI & ADSTSPI & ADS--BBp p g– Two intruder vehicles & flight crews
• King Air – representing “general aviation” intruder (small)C “
Z-XtremeSelf-Contained Unit
L1/L2
GPS S67-1575Antenna
ADS-B• Convair – representing “transport” intruder (large)
– Test equipment and engineering support• Automatic Dependent Surveillance-Broadcast
ADS BTransceiver
GDL 90Data Computer
Automatic Dependent Surveillance Broadcast (ADS-B)
• Time Space-Position Information (TSPI)ADS-B UAT 978 Mhz
Top / Bottom Antenna’s UAT
27Beech King Air N35 – “general
aviation” size intruderConvair 580 N39 – “transport”
size intruder

Representative Single-Intruder Test Geometries
• Level overtake • Ascending head-onAscending head on
• Level head-on
• Descending head-on
• Level abeam
28

Representative Multiple-Intruder Test Geometries
• Head-on, lateral separation • Crossing intrudersHead on, lateral separation g
• Head-on vertical separation• Head-on, vertical separation
29

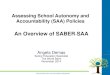
Flight Test Results: Closed-loop Collision AvoidanceAvoidance
“…This is How Pilot Would Have Done It...” Stated Dana Purifoy, Calspan Chief Test PilotCalspan Chief Test Pilot
LJ and Convair approach each other head on with 300 feet vertical and 0.2 nm lateral offsetsTA issued at 5.1nmEO detect and PaRCA
Play Movie
EO detect and PaRCA maneuver (bank to the right as required by right-of-way rules) initiated at 4 5s405_final_overlay_xvid.avi 4.5nmRA issued at 3nm and PaRCA follows the RA command to descend andcommand to descend and then level offLJ passes Convair well clear and scenario
30
clear and scenario terminated

Outline
• Sense and Avoid (SAA) background and need( ) g• SAA technology overview
– SAA architecture– Sensor suite– Sensor data fusion
A t lli i id– Autonomous collision avoidance
• SAA flight testH d i th l (HWIL) l b• Hardware-in-the-loop (HWIL) lab
31

SAA HWIL Lab
C FunctionalScene Generation
& IVMC’s Functional Equivalent
VMC’sTCAS II
Simulation Rack
Visual Displays
& Image Processing
Rack
VMCVMC Development
StationVehicle
Simulators & Control Station
32
Control Station

SAA HWIL Lab Details
33

TCAS HWIL Simulator
34

Real-time EO Sensor System Simulatory
• Vehicle SimulatorVehicle
Simulator
– Simulates Ownship and up to 10 intruder aircraft
IEEE 1394A
• Scene Generators– Simulate the
Ownship’s on-b d EO
Scene Generator
Scene Generator
Scene Generator
board EO sensors• Image Processors
– Process images d f
Ethernet TCP
Ethernet TCP
Ethernet TCP
and extract feature points of interest
• EO Track Manager
ImageProcessor
ImageProcessor
ImageProcessor
Ethernet UDP
– Associate related feature points into tracks of possible intruder aircraft
EO TrackManager
35
intruder aircraftIEEE 1394B

Scene Generation
• X-Plane version 8.60COTS Flight Simulator– COTS Flight Simulator
– Aircraft 3D Models– High Quality Graphics– Accurate Optical Effectsp
• Sun Glare, Shadows, Reflections
• Weather Management• Camera Position & FOV
-30° 30°
• X-Plane Plug-in SDK– C programs written by 3rd
party to work with X-Plane corecore
– Offers programmers access to control X-Plane’s internal variables
– Used to drive graphics of simulated vehicles
– Allow access to X-Plane OpenGL graphics
36
p g p

HWIL Lab Validation
HWIL Lab Flight 2936
37

Summaryy
• SAA capability comparable to manned aircraft is required for UA to fly freely in national and international airspace
• Northrop Grumman team has been developing enabling SAA technologies under Air Force Research Laboratory (AFRL)technologies under Air Force Research Laboratory (AFRL) sponsorship – Algorithm and software– System integration– System integration– Flight demonstration
• Northrop Grumman’s SAA HWIL lab has been used to facilitate SAA t h l d l tSAA technology development– Virtual prototyping– Lab validation
S t tifi ti t ti– System certification testing
38