-
National Instruments Measurement Fundamentals Series
1
National Instruments Measurement Fundamentals Series
Sensor Fundamentals
Sensor Terminology
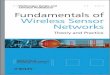
Sensitivity: The sensitivity of the sensor is defined as the
slope of the output characteristic curve
(DY/DX in Figure 1) or, more generally, the minimum input of
physical parameter that will create a
detectable output change. In some sensors, the sensitivity is
defined as the input parameter
change required to produce a standardized output change. In
others, it is defined as an output
voltage change for a given change in input parameter. For
example, a typical blood pressure
transducer may have a sensitivity rating of 10 mV/V/mm Hg; that
is, there will be a 10-mV output
voltage for each volt of excitation potential and each mm Hg of
applied pressure.
Sensitivity Error
The sensitivity error (shown as a dotted curve in Figure 1) is a
departure from the ideal slope of
the characteristic curve. For example, the pressure transducer
discussed above may have an actual
sensitivity of 7.8 mV/V/mm Hg instead of 10 mV/V/mm Hg.
Range: The range of the sensor is the maximum and minimum values
of applied parameter that
can be measured. For example, a given pressure sensor may have a
range of -400 to +400 mm Hg.
Alternatively, the positive and negative ranges often are
unequal. For example, a certain medical
blood pressure transducer is specified to have a minimum
(vacuum) limit of -50 mm Hg (Ymin in
Figure 1) and a maximum (pressure) limit of +450 mm Hg (Ymax in
Figure 1). This specification is
common, incidentally, and is one reason doctors and nurses
sometimes destroy blood pressure
sensors when attempting to draw blood through an arterial line
without being mindful of the
position of the fluid stopcocks in the system. A small syringe
can exert a tremendous vacuum on a
closed system.
-
National Instruments Measurement Fundamentals Series
2
Figure 1. Ideal curve and sensitivity error. Source: J.J. Carr,
Sensors and Circuits Prentice Hall.
Dynamic Range
The dynamic range is the total range of the sensor from minimum
to maximum. That is, in terms of
Figure 1, Rdyn = Ymax - l -Yminl.
Precision: The concept of precision refers to the degree of
reproducibility of a measurement. In
other words, if exactly the same value were measured a number of
times, an ideal sensor would
output exactly the same value every time. But real sensors
output a range of values distributed in
some manner relative to the actual correct value. For example,
suppose a pressure of exactly 150
mm Hg is applied to a sensor. Even if the applied pressure never
changes, the output values from
the sensor will vary considerably. Some subtle problems arise in
the matter of precision when the
true value and the sensor's mean value are not within a certain
distance of each other
(e.g., the 1-s range of the normal distribution curve).
Resolution: This specification is the smallest detectable
incremental change of input parameter
that can be detected in the output signal. Resolution can be
expressed either as a proportion of
the reading (or the full-scale reading) or in absolute
terms.
-
National Instruments Measurement Fundamentals Series
3
Accuracy: The accuracy of the sensor is the maximum difference
that will exist between the actual
value (which must be measured by a primary or good secondary
standard) and the indicated value
at the output of the sensor. Again, the accuracy can be
expressed either as a percentage of full
scale or in absolute terms.
Offset: The offset error of a transducer is defined as the
output that will exist when it should be
zero or, alternatively, the difference between the actual output
value and the specified output
value under some particular set of conditions. An example of the
first situation in terms of Figure 1
would exist if the characteristic curve had the same sensitivity
slope as the ideal but crossed the Y-
axis (output) at b instead of zero. An example of the other form
of offset is seen in the
characteristic curve of a pH electrode shown in Figure 2. The
ideal curve will exist only at one
temperature (usually 25C), while the actual curve will be
between the minimum temperature and
maximum temperature limits depending on the temperature of the
sample and electrode.
Figure 2. Typical pH electrode characteristic curve showing
temperature sensitivity. Source: J.J. Carr, Sensors and
Circuits Prentice Hall.
Linearity: The linearity of the transducer is an expression of
the extent to which the actual
measured curve of a sensor departs from the ideal curve. Figure
3 shows a somewhat exaggerated
relationship between the ideal, or least squares fit, line and
the actual measured or calibration line
(Note in most cases, the static curve is used to determine
linearity, and this may deviate
somewhat from a dynamic linearity) Linearity is often specified
in terms of percentage of
nonlinearity, which is defined as:
-
National Instruments Measurement Fundamentals Series
4
where
Nonlinearity (%) is the percentage of nonlinearity
Din(max) is the maximum input deviation
INf.s. is the maximum, full-scale input
The static nonlinearity defined by Equation 6-1 is often subject
to environmental factors, including
temperature, vibration, acoustic noise level, and humidity. It
is important to know under what
conditions the specification is valid and departures from those
conditions may not yield linear
changes of linearity.
Hysteresis: A transducer should be capable of following the
changes of the input parameter
regardless of which direction the change is made; hysteresis is
the measure of this property. Figure
4 shows a typical hysteresis curve. Note that it matters from
which direction the change is made.
Approaching a fixed input value (point B in Figure 4) from a
higher value (point P) will result in a
different indication than approaching the same value from a
lesser value (point Q or zero). Note
that input value B can be represented by F(X)1, F(X)2, or F(X)3
depending on the immediate
previous valueclearly an error due to hysteresis.
Figure 3. Ideal versus measured curve showing linearity error.
Source: J J Carr, Sensors and Circuits Prentice Hall
-
National Instruments Measurement Fundamentals Series
5
Figure 4. Hysteresis curve. Source: J.J. Carr, Sensors and
Circuits Prentice Hall.
Response Time: Sensors do not change output state immediately
when an input parameter change occurs. Rather, it will change to
the new state over a period of time, called the response
time (Tr in Figure 5). The response time can be defined as the
time required for a sensor output to
change from its previous state to a final settled value within a
tolerance band of the correct new
value. This concept is somewhat different from the notion of the
time constant (T) of the system.
This term can be defined in a manner similar to that for a
capacitor charging through a resistance
and is usually less than the response time.
The curves in Figure 5 show two types of response time. In
Figure 5a the curve represents the
response time following an abrupt positive going step-function
change of the input parameter.
The form shown in Figure 5b is a decay time (Td to distinguish
from Tr, for they are not always the
same) in response to a negative going step-function change of
the input parameter.
-
National Instruments Measurement Fundamentals Series
6
Figure 5. (a) Rise-time definition; (b) fall-time definition.
Source: J.J. Carr, Sensors and Circuits Prentice Hall.
Dynamic Linearity: The dynamic linearity of the sensor is a
measure of its ability to follow rapid changes in the input
parameter. Amplitude distortion characteristics, phase
distortion
characteristics, and response time are important in determining
dynamic linearity. Given a system
of low hysteresis (always desirable), the amplitude response is
represented by:
F(X) = aX + bX2 + cX
3
+ dX4 + + K (6-2)
In Equation 6-2, the term F(X) is the output signal, while the X
terms represent the input
parameter and its harmonics, and K is an offset constant (if
any). The harmonics become especially
important when the error harmonics generated by the sensor
action fall into the same frequency
bands as the natural harmonics produced by the dynamic action of
the input parameter. All
continuous waveforms are represented by a Fourier series of a
fundamental sinewave and its
harmonics. In any nonsinusoidal waveform (including time -
varying changes of a physical
parameter). Harmonics present will be that can be affected by
the action of the sensor.
-
National Instruments Measurement Fundamentals Series
7
Figure 6. Output versus input signal curves showing (a)
quadratic error; (b) cubic error. Source: J.J. Carr, Sensors
and
Circuits Prentice Hall.
The nature of the nonlinearity of the calibration curve (Figure
6) tell something about which
harmonics are present. In Figure 6a, the calibration curve
(shown as a dotted line) is asymmetrical,
so only odd harmonic terms exist. Assuming a form for the ideal
curve of F(x) = mx + K, Equation
6-2 becomes for the symmetrical case:
F(X) = aX + bX2 + cX
4 + + K (6-3)
In the other type of calibration curve (Figure 6b), the
indicated values are symmetrical about the
ideal mx + K curve. In this case, F(X) = -F(-X), and the form of
Equation 6-2 is:
F(X) = aX + bX3 + cX
5 + + K (6-4)
-
National Instruments Measurement Fundamentals Series
8
Now we will take a look at some of the tactics and signals
processing criteria that can be adapted
to biomedical applications to improve the nature of the data
collected from the sensor.
Taking Thermocouple Temperature Measurements
What Is Temperature?: Qualitatively, the temperature of an
object determines the sensation of
warmth or coldness felt by touching it. More specifically,
temperature is a measure of the average
kinetic energy of the particles in a sample of matter, expressed
in units of degrees on a standard
scale.
What Is a Thermocouple?: One of the most frequently used
temperature sensors is the
thermocouple. Thermocouples are very rugged, inexpensive devices
that operate over a wide
temperature range. A thermocouple is created whenever two
dissimilar metals touch and the
contact point produces a small open-circuit voltage as a
function of temperature. This
thermoelectric voltage is known as the Seebeck voltage, named
after Thomas Seebeck, who
discovered it in 1821. The voltage is nonlinear with respect to
temperature. However, for small
changes in temperature, the voltage is approximately linear,
or
(1)
where DV is the change in voltage, S is the Seebeck coefficient,
and DT is the change in
temperature.
S varies with changes in temperature, however, causing the
output voltages of thermocouples to
be nonlinear over their operating ranges. Several types of
thermocouples are available, and
different types are designated by capital letters that indicate
their composition according to
American National Standards Institute (ANSI) conventions. For
example, a J-type thermocouple
has one iron conductor and one constantan (a copper-nickel
alloy) conductor. A complete list of
available thermocouples is shown in Table 1 below.
Table 1. Compositions and Letter Designations of the
Standardized Thermocouples
Thermocouple
Type
Conductors Positive Conductors Negative
B Platinum-30% rhodium Platinum-6% rhodium
E Nickel-chromium alloy Copper-nickel alloy
J Iron Copper-nickel alloy
K Nickel-chromium alloy Nickel-aluminum alloy
N Nickel-chromium-silicon alloy Nickel-silicon-magnesium
alloy
R Platinum-13% rhodium Platinum
S Platinum-10% rhodium Platinum
-
National Instruments Measurement Fundamentals Series
9
T Copper Copper-nickel alloy
Thermocouple Measurement and Signal Conditioning: To measure a
thermocouple Seebeck
voltage, you cannot simply connect the thermocouple to a
voltmeter or other measurement
system, because connecting the thermocouple wires to the
measurement system creates
additional thermoelectric circuits.
Figure 1. J-Type Thermocouple
Consider the circuit illustrated in Figure 1, in which a J-type
thermocouple is in a candle flame that
has a temperature you want to measure. The two thermocouple
wires are connected to the
copper leads of a DAQ board. Notice that the circuit contains
three dissimilar metal junctions J1,
J2, and J3. J1, the thermocouple junction, generates a Seebeck
voltage proportional to the
temperature of the candle flame. J2 and J3 each have their own
Seebeck coefficient and generate
their own thermoelectric voltage proportional to the temperature
at the DAQ terminals. To
determine the voltage contribution from J1, you need to know the
temperatures of junctions J2
and J3 as well as the voltage-to-temperature relationships for
these junctions. You can then
subtract the contributions of the parasitic junctions at J2 and
J3 from the measured voltage at
junction J1.
Thermocouples require some form of temperature reference to
compensate for these unwanted
parasitic "cold" junctions. The most common method is to measure
the temperature at the
reference junction with a direct-reading temperature sensor and
subtract the parasitic junction
voltage contributions. This process is called cold-junction
compensation. You can simplify
computing cold-junction compensation by taking advantage of some
thermocouple characteristics.
By using the Thermocouple Law of Intermediate Metals and making
some simple assumptions, you
can see that the voltage a data acquisition system measures
depends only on the thermocouple
type, the thermocouple voltage, and the cold-junction
temperature. The measured voltage is in
fact independent of the composition of the measurement leads and
the cold junctions, J2 and J3.
According to the Thermocouple Law of Intermediate Metals,
illustrated in Figure 2, inserting any
type of wire into a thermocouple circuit has no effect on the
output as long as both ends of that
wire are the same temperature, or isothermal.
-
National Instruments Measurement Fundamentals Series
10
Figure 2. Thermocouple Law of Intermediate Metals
Consider the circuit in Figure 3. This circuit is similar to the
previously described circuit in Figure 1,
but a short length of constantan wire has been inserted just
before junction J3 and the junctions
are assumed to be held at identical temperatures. Assuming that
junctions J3 and J4 are the same
temperature, the Thermocouple Law of Intermediate Metals
indicates that the circuit in Figure 3 is
electrically equivalent to the circuit in Figure 1.
Consequently, any result taken from the circuit in
Figure 3 also applies to the circuit illustrated in Figure
1.
Figure 3. Inserting an Extra Lead in the Isothermal Region
In Figure 3, junctions J2 and J4 are the same type
(copper-constantan); because both are in the
isothermal region, J2 and J4 are also the same temperature.
Because of the direction of the
current through the circuit, J4 contributes a positive Seebeck
voltage, and J2 contributes an equal
but opposite negative voltage. Therefore, the effects of the
junctions cancel each other, and the
total contribution to the measured voltage is zero. Junctions J1
and J3 are both iron-constantan
junctions, but may be at different temperatures because they do
not share an isothermal region.
Because they are at different temperatures, junctions J1 and J3
both produce a Seebeck voltage,
but with different magnitudes. To compensate for the cold
junction J3, its temperature is
measured and the contributed voltage is subtracted out of the
thermocouple measurement.
Using the notation VJx(Ty) to indicate the voltage generated by
the junction Jx at temperature Ty,
the general thermocouple problem is reduced to the following
equation:
VMEAS = VJ1(TTC ) + VJ3(Tref ) (2)
where VMEAS is the voltage the DAQ board measures, TTC is the
temperature of the thermocouple at
J1, and Tref is the temperature of the reference junction.
Notice that in Equation 2, VJx(Ty) is a voltage generated at
temperature Ty with respect to some
reference temperature. As long as both VJ1 and VJ3 are functions
of temperature relative to the
-
National Instruments Measurement Fundamentals Series
11
same reference temperature, equation 2 is valid. As stated
earlier, for example, NIST
thermocouple reference tables are generated with the reference
junction held at 0 C.
Because junction J3 is the same type as J1 but contributes an
opposite voltage, VJ3(Tref ) = -VJ1(Tref ).
Because VJ1 is the voltage that the thermocouple type undergoing
testing generates, this voltage
can be renamed VTC . Therefore, Equation 2 is rewritten as
follows:
VMEAS = VTC (TTC ) - VTC (Tref ) (3)
Therefore, by measuring VMEAS and Tref , and knowing the
voltage-to-temperature relationship of
the thermocouple, you can determine the temperature at the hot
junction of the thermocouple.
There are two techniques for implementing cold-junction
compensation - hardware compensation
and software compensation. Both techniques require that the
temperature at the reference
junction be sensed with a direct-reading sensor. A
direct-reading sensor has an output that
depends only on the temperature of the measurement point.
Semiconductor sensors, thermistors,
or RTDs are commonly used to measure the reference-junction
temperature. For example, several
National Instruments SCXI terminal blocks include thermistors
located near the screw terminals to
which thermocouple wires are connected.
With hardware compensation, a variable voltage source is
inserted into the circuit to cancel the
parasitic thermoelectric voltages. The variable voltage source
generates a compensation voltage
according to the ambient temperature, and thus adds the correct
voltage to cancel the unwanted
thermoelectric signals. When these parasitic signals are
canceled, the only signal a data acquisition
system measures is the voltage from the thermocouple junction.
With hardware compensation,
the temperature at the data acquisition system terminals is
irrelevant because the parasitic
thermocouple voltages have been canceled. The major disadvantage
of hardware compensation is
that each thermocouple type must have a separate compensation
circuit that can add the correct
compensation voltage; this fact makes the circuit fairly
expensive. Hardware compensation is also
generally less accurate than software compensation.
Alternatively, you can use software for cold-junction
compensation. After a direct-reading sensor
measures the reference-junction temperature, software can add
the appropriate voltage value to
the measured voltage to eliminate the parasitic thermocouple
effects. Recall Equation 3, which
states that the measured voltage, VMEAS, is equal to the
difference between the voltages at the hot
junction (thermocouple) and cold junction.
Thermocouple output voltages are highly nonlinear. The Seebeck
coefficient can vary by a factor of
three or more over the operating temperature range of some
thermocouples. For this reason, you
must either approximate the thermocouple
voltage-versus-temperature curve using polynomials,
or use a look-up table. The polynomials are in the following
form:
T = a0 + a1v + a2v2 + ... + anv
n (4)
-
National Instruments Measurement Fundamentals Series
12
where v is the thermocouple voltage in volts, T is the
temperature in degrees Celsius, and a0
through an are coefficients that are specific to each
thermocouple type.
Eliminating Noise
Thermocouple output signals are typically in the millivolt
range, making them susceptible to noise.
Lowpass filters are commonly used in thermocouple data
acquisition systems to effectively
eliminate high frequency noise in thermocouple measurements. For
instance, lowpass filters are
useful for removing the 60 Hz power line noise that is prevalent
in many laboratory and plant
settings.
You can also significantly improve the noise performance of your
system by amplifying the low-
level thermocouple voltages near the signal source (measurement
point). Because thermocouple
output voltage levels are very low, you should choose a gain
that optimizes the input limits of the
analog-to-digital converter (ADC). The output range of all
thermocouple types falls between -10
mV and 80 mV.
Another source of noise is due to thermocouples being mounted or
soldered directly to a
conductive material, like steel or water. This configuration
makes thermocouples particularly
susceptible to common-mode noise and ground loops. Isolation
helps to prevent ground loops
from occurring, and can dramatically improve the rejection of
common-mode noise. With
conductive material that has a large common-mode voltage,
isolation is required as non-isolated
amplifiers cannot measure signals with large common- mode
voltages.
To see how filtering and amplification can dramatically improve
the accuracy of thermocouple
measurements, visit the Online Accuracy Lab.
Connecting a Thermocouple to an Instrument: For this section,
consider an example using an NI
cDAQ-9172 chassis and an NI 9211 C Series thermocouple module.
Similar procedures apply for
connecting a thermocouple to different instruments (see figure
4).
Required equipment includes the following:
- cDAQ-9172 eight-slot Hi-Speed USB chassis for NI
CompactDAQ
- NI 9211 four-channel, 14 S/s, 24-bit, 80 mV thermocouple input
module
- J-type thermocouple
-
National Instruments Measurement Fundamentals Series
13
Figure 4. NI CompactDAQ System with NI 9211 Thermocouple
Module
The NI 9211 has a 10-terminal, detachable screw-terminal
connector that provides connections for
four thermocouple input channels. Each channel has a terminal to
which you can connect the
positive lead of the thermocouple, TC+, and a terminal to which
you can connect the negative lead
of the thermocouple, TC. The NI 9211 also has a common terminal,
COM, which is internally
connected to the isolated ground reference of the module. Refer
to Figure 5 for the terminal
assignments for each channel and Figure 6 for a connection
schematic.
Figure 5. Terminal Assignments
-
National Instruments Measurement Fundamentals Series
14
Figure 6. Connection Schematic
Measuring Temperature with an RTD or Thermistor
RTDs and Thermistors.
RTDS
Resistance temperature detectors (RTDs) operate on the principle
of changes in electrical
resistance of pure metals and are characterized by a linear
positive change in resistance with
temperature. Typical elements used for RTDs include nickel (Ni)
and copper (Cu), but platinum (Pt)
is by far the most common because of its wide temperature range,
accuracy, and stability.
RTDs are constructed by one of two different manufacturing
configurations. Wire-wound RTDs are
constructed by winding a thin wire into a coil. A more common
configuration is the thin-film
element, which consists of a very thin layer of metal laid out
on a plastic or ceramic substrate.
Thin-film elements are cheaper and more widely available because
they can achieve higher
nominal resistances with less platinum. To protect the RTD, a
metal sheath encloses the RTD
element and the lead wires connected to it.
RTDs are popular because of their excellent stability, and
exhibit the most linear signal with
respect to temperature of any electronic temperature sensor.
They are generally more expensive
than alternatives, however, because of the careful construction
and use of platinum. RTDs are also
characterized by a slow response time and low sensitivity; and
because they require current
excitation, they can be prone to self-heating.
RTDs are commonly categorized by their nominal resistance at 0
C. Typical nominal resistance
values for platinum thin-film RTDs include 100 and 1000 . The
relationship between resistance
and temperature is very nearly linear and follows the
equation
-
National Instruments Measurement Fundamentals Series
15
For 0 C RT = R0 [ 1 + aT + bT2 ]
Where RT = resistance at temperature T
R0 = nominal resistance
a, b, and c are constants used to scale the RTD
The resistance/temperature curve for a 100 W platinum RTD,
commonly referred to as Pt100, is
shown below:
Figure 1. Resistance-Temperature Curve for a 100 Platinum RTD, a
= 0.00385
The most common RTD is the platinum thin-film with an a of
0.385%/C and is specified per DIN EN
60751. The a value depends on the grade of platinum used, and
also commonly include
0.3911%/C and 0.3926%/C. The a value defines the sensitivity of
the metallic element, but is
normally used to distinguish between resistance/temperature
curves of various RTDs.
Table 1. Callendar-Van Dusen Coefficients Corresponding to
Common RTDs
Standard Temperature
Coefficient (a)
A B C
DIN 43760 0.003850
American 0.003911
ITS-90 0.003926
* For temperatures below 0 C only; C = 0.0 for temperatures
above 0 C.
Thermistors
Thermistors (thermally sensitive resistors) are similar to RTDs
in that they are electrical resistors
whose resistance changes with temperature. Thermistors are
manufactured from metal oxide
semiconductor material which is encapsulated in a glass or epoxy
bead.
Thermistors have a very high sensitivity, making them extremely
responsive to changes in
temperature. For example, a 2252 W thermistor has a sensitivity
of -100 W/C at room
temperature. In comparison, a 100 W RTD has a sensitivity of 0.4
W/C. Thermistors also have a
low thermal mass that results in fast response times, but are
limited by a small temperature range.
-
National Instruments Measurement Fundamentals Series
16
Thermistors have either a negative temperature coefficient (NTC)
or a positive temperature
coefficient (PTC). The first has a resistance which decreases
with increasing temperature and the
latter exhibits increased resistance with increasing
temperature. Figure 2 shows a typical
thermistor temperature curve compared to a typical 100 W RTD
temperature curve:
Figure 2. Resistance versus Temperature for a Typical Thermistor
and RTD
RTD and Thermistor Measurement and Signal Conditioning: Because
RTDs and thermistors are
resistive devices, you must supply them with an excitation
current and then read the voltage
across their terminals. If extra heat cannot be dissipated, I2R
heating caused by the excitation
current can raise the temperature of the sensing element above
that of the ambient temperature.
Self-heating will actually change the resistance of the RTD or
thermistor, causing error in the
measurement. The effects of self-heating can be minimized by
supplying lower excitation current.
The easiest way to connect an RTD or thermistor to a measurement
device is with a 2-wire
connection.
Figure 3. Making a 2-Wire RTD/Thermistor Measurement
With this method, the two wires that provide the RTD or
thermistor with its excitation current are
also used to measure the voltage across the sensor. Because of
the low nominal resistance of
RTDs, measurement accuracy can be drastically affected by lead
wire resistance. For example, lead
-
National Instruments Measurement Fundamentals Series
17
wires with a resistance of 1 W connected to a 100 W platinum RTD
cause a 1% measurement
error.
A 3-wire or 4-wire connection method can eliminate the effects
of lead wire resistance. The
connection places leads on a high impedance path through the
measurement device, effectively
eliminating error caused by lead wire resistance. It is not
necessary to use a 3 or 4-wire connection
method for thermistors because they typically have much higher
nominal resistance values than
RTDs. A diagram of a 4-wire connection is shown below.
Figure 4. Making a 4-Wire RTD Measurement
RTD and thermistor output signals are typically in the millivolt
range, making them susceptible to
noise. Lowpass filters are commonly used in RTD and thermistor
data acquisition systems to
effectively eliminate high frequency noise in RTD and thermistor
measurements. For instance,
lowpass filters are useful for removing the 60 Hz power line
noise that is prevalent in most
laboratory and plant settings.
DAQ Systems for Measuring Temperature with RTDs and
Thermistors:
Using SCXI with RTDs and Thermistors
National Instruments SCXI is a signal conditioning system for
PC-based data acquisition systems.
An SCXI system consists of a shielded chassis that houses a
combination of signal conditioning
input and output modules, which perform a variety of signal
conditioning functions. You can
connect many different types of sensors, including RTDs and
thermistors, directly to SCXI modules.
The SCXI system can operate as a front-end signal conditioning
system for PC plug-in data
acquisition (DAQ) devices (PCI and PCMCIA) or PXI DAQ
modules.
-
National Instruments Measurement Fundamentals Series
18
Figure 5. SCXI Signal Conditioning System
SCXI offers a variety of analog and digital signal conditioning
modules for various types of signals,
including RTDs and thermistors. Table 1 includes the features of
SCXI modules that can be used for
RTD and thermistor measurements.
Table 1. SCXI Signal Conditioning Modules for RTDs and
Thermistors
SCXI-1121 SCXI-1122 SCXI-1102 w/ SCXI
1581
Number of inputs 4 16 (devices in series)
8 (4-wire scanning mode)
32
Amplifier gains 1 to 2000 jumper
selectable
1 to 2000 jumper
selectable
1 or 100 software
selectable per
channel
Filtering options 4 Hz or 10 kHz 4 Hz or 4 kHz software
programmable
2 Hz
Isolation 250 Vrms 480 Vrms N/A
Excitation Values 3.33 V, 10 V
0.15 mA, 0.45 mA
3.33 V
1 mA
100 A
Recommended
terminal block for
RTDs/Thermistors
SCXI-1320 or SCXI-1322 SCXI-1322 SCXI-1300 or SCXI-
1303
Measuring Pressure with Pressure Sensors
-
National Instruments Measurement Fundamentals Series
19
What is Pressure?: Pressure is defined as force per unit area
that a fluid exerts on its
surroundings.[1] For example, pressure, P, is a function of
force, F, and area, A.
P = F/A
A container full of gas contains innumerable atoms and molecules
that are constantly bouncing
of its walls. The pressure would be the average force of these
atoms and molecules on its walls per
unit of area of the container. Moreover, pressure does not have
to be measured along the wall of
a container but rather can be measured as the force per unit
area along any plane. Air pressure,
for example, is a function of the weight of the air pushing down
on Earth. Thus, as the altitude
increases, pressure decreases. Similarly, as a scuba diver or
submarine dives deeper into the
ocean, the pressure increases.
The SI unit for pressure is the Pascal (N/m2), but other common
units of pressure include pounds
per square inch (PSI), atmospheres (atm), bars, inches of
mercury (in Hg), and millimeters of
mercury (mm Hg).
A pressure measurement can be described as either static or
dynamic. The pressure in cases
where no motion is occurring is referred to as static pressure.
Examples of static pressure include
the pressure of the air inside a balloon or water inside a
basin. Often times, the motion of a fluid
changes the force applied to its surroundings. Such a pressure
measurement is known as dynamic
pressure measurement. For example, the pressure inside a balloon
or at the bottom of a water
basin would change as air is let out of the balloon or as water
is poured out of the basin.
Head pressure(or pressure head) measures the static pressure of
a liquid in a tank or a pipe. Head
pressure, P, is a function solely on the height of the liquid,
h, and weight density, w, of the liquid
being measured as shown in Figure 1 below.
Figure 1. Head Pressure Measurement
The pressure on a scuba diver swimming in the ocean would be the
diver's depth multiplied by the
weight of the ocean (64 pounds per cubic foot). A scuba diver
diving 33 feet into the ocean would
have 2112 pounds of water on every square foot of his body. That
translates to 14.7 PSI.
Interestingly enough, the atmospheric pressure of the air at sea
level is also 14.7 PSI or 1 atm.
Thus, 33 feet of water create as much pressure as 5 miles of
air! The total pressure on a scuba
diver 33 feet deep ocean would be the combined pressure caused
by the weight of the air and the
-
National Instruments Measurement Fundamentals Series
20
water, that would be 29.4 PSI or 2 atm.
A pressure measurement can further be described by the type of
measurement being performed.
There are three types of pressure measurements: absolute, gauge,
and differential. Absolute
pressure measurement is measured relative to a vacuum (Figure
2). Often times, the abbreviations
PAA (Pascals Absolute) or PSIA (Pounds per Square Inch Absolute)
are used to describe absolute
pressure.
Figure 2. Absolute Pressure Sensor [3]
Gauge pressure is measured relative to ambient atmospheric
pressure (Figure 3). Similar to
absolute pressure, the abbreviations PAG (Pascals Gauge) or PSIG
(Pounds per Square Inch
Gauge) are used to describe gauge pressure.
Figure 3. Gauge Pressure Sensor [3]
Differential pressure is similar to gauge pressure, but instead
of measuring relative to ambient
atmospheric pressure, differential measurements are taken with
respect to a specific reference
pressure (Figure 4). Also, the abbreviations PAD (Pascals
Differential) or PSID (Pounds per Square
Inch Differential) are used to describe differential
pressure.
-
National Instruments Measurement Fundamentals Series
21
Figure 4. Differential Pressure Sensor [3]
The Pressure Sensor: Because of the great variety of conditions,
ranges, and materials for which
pressure must be measured, there are many different types of
pressure sensor designs. Often
pressure can be converted to some intermediate form, such as
displacement. The sensor then
converts this displacement into an electrical output such as
voltage or current. The three most
universal types of pressure transducers of this form are the
strain gage, variable capacitance, and
piezoelectric.
Of all the pressure sensors, Wheatstone bridge (strain based)
sensors are the most common,
offering solutions that meet varying accuracy, size, ruggedness,
and cost constraints. Bridge
sensors are used for high and low pressure applications, and can
measure absolute, gauge, or
differential pressure. All bridge sensors make use of a strain
gauge and a diaphragm (Figure 4).
Figure 4. Cross Section of a Typical Strain Gauge Pressure
Sensor [3]
When a change in pressure causes the diaphragm to deflect, a
corresponding change in resistance
is induced on the strain gauge, which can be measured by a Data
Acquisition (DAQ) System. These
strain gauge pressure transducers come in several different
varieties: the bonded strain gauge, the
sputtered strain gauge, and the semiconductor strain gauge.
-
National Instruments Measurement Fundamentals Series
22
In the bonded strain gauge pressure sensor, a metal foil strain
gauge is actually glued or bonded to
the surface where strain is being measured. These bonded foil
strain gauges (BFSG) have been the
industry standard for years and are continually used because of
their quick 1000 Hz response
times to changes in pressure as well as their large -452F to
-525F operating temperature.
Sputtered strain gauge manufacturers sputter a layer of glass
onto the diaphragm and then
deposit a thing metal film strain gauge on to the transducers
diaphragm. Sputtered strain gauge
sensors actually form a molecular bond between the strain gauge
element, the insulating later,
and the sensing diaphragm. These gauges are most suitable for
long-term use and harsh
measurement conditions.
Integrated circuit manufacturers have developed composite
pressure sensors that are particularly
easy to use. These devices commonly employ a semiconductor
diaphragm onto which a
semiconductor strain gauge and temperature-compensation sensor
have been grown. Appropriate
signal conditioning is included in integrated circuit form,
providing a dc voltage or current linearly
proportional to pressure over a specified range.
The capacitance between two metals plates changes if the
distance between these two plates
changes. A variable capacitance pressure transducer (Figure 5),
measures the change in
capacitance between a metal diaphragm and a fixed metal plate.
These pressure transducers are
generally very stable and linear, but are sensitive to high
temperatures and are more complicated
to setup than most pressure sensors.
Figure 5. Capacitance Pressure Transducer [4]
Piezoelectric pressure transducer (Figure 6) take advantage of
the electrical properties of naturally
occurring crystals such as quartz. These crystals generate an
electrical charge when they are
strained. Piezoelectric pressure sensors do not require an
external excitation source and are very
rugged. The sensors however, do require charge amplification
circuitry and very susceptible to
shock and vibration.
-
National Instruments Measurement Fundamentals Series
23
Figure 6. Piezoelectric Pressure Transducer [4]
A common cause of sensor failure in pressure measurement
applications is dynamic impact, which
results in sensor overload. A classic example of overloading a
pressure sensor is known as the
water hammer phenomenon. This occurs when a fast moving fluid is
suddenly stopped by the
closing of a valve. The fluid has momentum that is suddenly
arrested, which causes a minute
stretching of the vessel in which the fluid is constrained. This
stretching generates a pressure spike
that can damage a pressure sensor. To reduce the effects of
water hammer, sensors are often
mounted with a snubber between the sensor and the pressure line.
A snubber is usually a mesh
filter or sintered material that allows pressurized fluid
through but does not allow large volumes of
fluid through and therefore prevents pressure spikes in the
event of water hammer. A snubber is a
good choice to protect your sensor in certain applications, but
in many tests the peak impact
pressure is the region of interest. In such a case you would
want to select a pressure sensor that
does not include overprotection. [3]
Pressure Measurement: As described above, the natural output of
a pressure transducer is a
voltage. Most strain based pressure transducers will output a
small mV voltage. This small signal
requires several signal conditioning considerations that are
discussed in the next section.
Additionally, many pressure transducers will output a
conditioned 0-5V signal or 4-20 mA current.
Both of these outputs are linear across the working range of the
transducer. For example both 0 V
and 4 mA correspond to a 0 pressure measurement. Similarly, 5
volts and 20 mA correspond to the
Full Scale Capacity or the maximum pressure the transducer can
measure. The 0-5V and 4-20 mA
signals can easily be measured by National Instruments
Multi-function Data Acquisition (DAQ)
hardware.
Signal Conditioning for Pressure Sensors: As with any other
bridge based sensor, there are several
signal conditioning considerations. To ensure accurate bridge
measurements, it is important to
consider the following:
Bridge completion
Excitation
Remote sensing
Amplification
Filtering
Offset
-
National Instruments Measurement Fundamentals Series
24
Shunt Calibration
Each of these considerations are addressed thoroughly in the
Measuring Strain with Strain Gauges
tutorial linked below.
Once you have obtained a measurable voltage signal, that signal
must be converted to actual units
of pressure. Pressure sensors generally produce a linear
response across their range of operation,
so linearization is often unnecessary, but you will need some
hardware or software to convert the
voltage output of the sensor into a pressure measurement. The
conversion formula you will use
depends on the type of sensor you are using, and will be
provided by the sensor manufacturer. A
typical conversion formula will be a function of the excitation
voltage, full scale capacity of the
sensor, and a calibration factor.
For example, a pressure trandsducer with a full scale capacity
of 10,000 PSI and a calibration factor
of 3mv/V and given an excitation voltage of 10V DC produces a
measured voltage of 15 mV, the
measured pressure would be 5000 PSI.
After you have properly scaled your signal, it is necessary to
obtain a proper rest position. Pressure
sensors (whether absolute or gauge) have a certain level that is
identified as the rest position, or
reference position. The strain gauge should produce 0 volts at
this position. Offset nulling circuitry
adds or removes resistance from one of the legs of the strain
gauge to achieve this "balanced"
position. Offset nulling is critical to ensure the accuracy of
your measurement and for best results
should be performed in hardware rather than software.
DAQ Systems for Pressure Measurements:
C Series Hardware for a Modular, Flexible System
National Instruments C Series hardware for strain(bridge) based
pressure sensors include two
modules with varying specifications and several module carriers
to create a flexible, modular
system. The NI 9237 module can measure quarter, half, and
full-bridge sensors including pressure
sensors. The NI 9237 is a 4 channel module that samples at
24-bits of resolution and 50kS/s/ch for
true simultaneous measurements. Another C Series module for
pressure measurement is the NI
9219 which also measures quarter, half, and full bridge sensors.
The NI 9219 has ch-ch isolation,
24-bit ADCs, and samples at 100S/s/ch. In addition to bridge
measurements, the NI 9219 is a
universal module which means it can also measure thermocouples,
RTDs, voltage, current, and
resistance. Both the NI 9237 and NI 9219 modules can power
strain gages or pressure
transducers.
-
National Instruments Measurement Fundamentals Series
25
There are several options to use these modules. They are both
supported by the USB single
module carrier, NI CompactDAQ chassis, and CompactRIO chassis
for programming and data
storage (Figure 7). The 9219 and 9237 modules can also be used
with the Ethernet or Wireless
carrier (Figure 8). Using this communication interfaces allows
to implement data acquisition
systems located over a large area or where the communication
though cable is inconvenient.
Figure 7. USB CompactDAQ, CompactRIO and C Series USB Carrier
shown with modules
Figure 8. Ethernet C Series Single Module Carrier with NI 9219
and Wi-Fi C Series Single Module Carrier with NI 9237
Using SCXI with Pressure Measurements
National Instruments SCXI is a signal conditioning system for
PC-based data acquisition systems
(Figure 9). An SCXI system consists of a shielded chassis that
houses a combination of signal
conditioning input and output modules, which perform a variety
of signal conditioning functions.
You can connect many different types of sensors, including
absolute and gauge pressure sensors,
directly to SCXI modules. The SCXI system can operate as a
front-end signal conditioning system
for PC plug-in data acquisition (DAQ) devices (PCI and PCMCIA)
or PXI DAQ modules.
-
National Instruments Measurement Fundamentals Series
26
Figure 9. A Typical National Instruments SCXI System
SCXI offers an excellent solution for measuring pressure. The
SCXI-1520 universal strain-gauge
module is ideal for taking strain based pressure measurements.
It provides 8 simultaneous
sampled analog input channels each with bridge completion,
programmable excitation (0-10 V),
remote excitation sensing, programmable gain amplification
(1-1000), a programmable 4-pole
Butterworth filter (10 Hz, 100 Hz, 1 kHz, 10kHz), offset
nulling, and shunt calibration. The SCXI-
1314 terminal block provides screw terminals for easy
connections to your sensors. Additionally,
the SCXI-1314T includes a built-in TEDS reader for Class II
bridge-based smart TEDS sensors.
Recommended starter kit for Pressure SCXI DAQ System:
1. SCXI-1600 DAQ module
2. SCXI chassis
3. SCXI-1520 modules and SCXI-1314/SCXI-1314T terminal
blocks
4. Refer to ni.com/sensors for recommended sensor vendors
For a customized solution, see the SCXI Advisor linked
below.
Using SC Series DAQ with Strain Based Pressure Sensors
For high performance integrated DAQ and signal conditioning, the
National Instruments PXI-4220
(Figure 10), part of the SC Series, provides an excellent
measurement solution. SC Series DAQ
offers up to 333 kS/s measurements with 16-bit resolution, and
combines data acquisition and
signal conditioning into one plug in board. The PXI-4220 is a
200 kS/s, 16 bit DAQ board with
programmable excitation, gain, and 4-pole Butterworth filter.
Each input channel of the PXI-4220
also includes a 9-pin D-Sub connector for easy connection to
bridge sensors, and programmable
shunt and null calibration circuitry. The PXI-4220 provides the
perfect solution for dynamic
pressure measurements with low channel counts.
-
National Instruments Measurement Fundamentals Series
27
Figure 10. National Instruments PXI-4220
Recommended starter kit for Pressure SC Series DAQ System:
1. PXI chassis
2. PXI embedded controller
3. PXI-4220 modules
4. Refer to ni.com/sensors for recommended sensor vendors
Accelerometer Principles
Spring-Mass System: Newton's law simply states that if a mass,
m, is undergoing an acceleration,
a, then there must be a force F acting on the mass and given by
F = ma. Hooke's law states that if a
spring of spring constant k is stretched (extended) from its
equilibrium position for a distance Dx,
then there must be a force acting on the spring given by F =
kDx.
FIGURE 5.23 The basic spring-mass system accelerometer.
-
National Instruments Measurement Fundamentals Series
28
In Figure 5.23a we have a mass that is free to slide on a base.
The mass is connected to the base by
a spring that is in its unextended state and exerts no force on
the mass. In Figure 5.23b, the whole
assembly is accelerated to the left, as shown. Now the spring
extends in order to provide the force
necessary to accelerate the mass. This condition is described by
equating Newton's and Hooke's
laws:
ma = kDx (5.25)
where k = spring constant in N/m
Dx = spring extension in m
m = mass in kg
a = acceleration in m/s2
Equation (5.25) allows the measurement of acceleration to be
reduced to a measurement of
spring extension (linear displacement) because
If the acceleration is reversed, the same physical argument
would apply, except that the spring is
compressed instead of extended. Equation (5.26) still describes
the relationship between spring
displacement and acceleration.
The spring-mass principle applies to many common accelerometer
designs. The mass that converts
the acceleration to spring displacement is referred to as the
test mass or seismic mass. We see,
then, that acceleration measurement reduces to linear
displacement measurement; most designs
differ in how this displacement measurement is made.
Natural Frequency and Damping: On closer examination of the
simple principle just described, we
find another characteristic of spring-mass systems that
complicates the analysis. In particular, a
system consisting of a spring and attached mass always exhibits
oscillations at some characteristic
natural frequency. Experience tells us that if we pull a mass
back and then release it (in the
absence of acceleration), it will be pulled back by the spring,
overshoot the equilibrium, and
oscillate back and forth. Only friction associated with the mass
and base eventually brings the
mass to rest. Any displacement measuring system will respond to
this oscillation as if an actual
acceleration occurs. This natural frequency is given by
where fN = natural frequency in Hz
k = spring constant in N/m
m = seismic mass in kg
The friction that eventually brings the mass to rest is defined
by a damping coefficient , which has
-
National Instruments Measurement Fundamentals Series
29
the units of s-1
. In general, the effect of oscillation is called transient
response, described by a
periodic damped signal, as shown in Figure 5.24, whose equation
is
XT(t) = Xoe-t
sin(2pfNt) (5.28)
where Xr(t) = transient mass position
Xo = peak position, initially
= damping coefficient
fN = natural frequency
The parameters, natural frequency, and damping coefficient in
Equation (5.28) have a profound
effect on the application of accelerometers.
Vibration Effects: The effect of natural frequency and damping
on the behavior of spring-mass
accelerometers is best described in terms of an applied
vibration. If the spring-mass system is
exposed to a vibration, then the resultant acceleration of the
base is given by Equation (5.23)
a(t) = -w2xo sin wt
If this is used in Equation (5.25), we can show that the mass
motion is given by
where all terms were previously denned and w = 2pf, with/the
applied frequency.
FIGURE 5.24 A spring-mass system exhibits a natural oscillation
with damping as response to an impulse input.
FIGURE 5.25 A spring-mass accelerometer has been attached to a
table which is exhibiting vibration. The table peak
motion is xo and the mass motion is Dx.
-
National Instruments Measurement Fundamentals Series
30
To make the predictions of Equation (5.29) clear, consider the
situation presented in Figure 5.25.
Our model spring-mass accelerometer has been fixed to a table
that is vibrating. The xo in Equation
(5.29) is the peak amplitude of the table vibration, and Dx is
the vibration of the seismic mass
within the accelerometer. Thus, Equation (5.29) predicts that
the seismic-mass vibration peak
amplitude varies as the vibration frequency squared, but
linearly with the table-vibration
amplitude. However, this result was obtained without
consideration of the spring-mass system
natural vibration. When this is taken into account, something
quite different occurs.
Figure 5.26a shows the actual seismic-mass vibration peak
amplitude versus table-vibration
frequency compared with the simple frequency squared
prediction.You can see that there is a resonance effect when
the
table frequency equals the natural frequency of the
accelerometer,
that is, the value of Dx goes through a peak. The amplitude of
the
resonant peak is determined by the amount of damping. The
seismic-
mass vibration is described by Equation (5.29) only up to
about
fN/2.5.
Figure 5.26b shows two effects. The first is that the actual
seismic-mass motion is limited by the
physical size of the accelerometer. It will hit "stops" built
into the assembly that limit its motion
during resonance. The figure also shows that for frequencies
well above the natural frequency, the
motion of the mass is proportional to the table peak motion, xo,
but not to the frequency. Thus, it
has become a displacement sensor. To summarize:
1. f < fN - For an applied frequency less than the natural
frequency, the natural frequency has little
effect on the basic spring-mass response given by Equations
(5.25) and (5.29). A rule of thumb
states that a safe maximum applied frequency is f <
1/2.5fN.
2. f > fN - For an applied frequency much larger than the
natural frequency, the accelerometer
output is independent of the applied frequency. As shown in
Figure 5.26b, the accelerometer
becomes a measure of vibration displacement xo of Equation
(5.20) under these circumstances. It
is interesting to note that the seismic mass is stationary in
space in this case, and the housing,
which is driven by the vibration, moves about the mass. A
general rule sets f > 2.5 fN for this case.
Generally, accelerometers are not used near the resonance at
their natural frequency because of
high nonlinearities in output.
-
National Instruments Measurement Fundamentals Series
31
FIGURE 5.26 In (a) the actual response of a spring-mass system
to vibration is compared to the simple w
2 prediction In
(b) the effect of various table peak motion is shown
EXAMPLE 5.14
An accelerometer has a seismic mass of 0.05 kg and a spring
constant of 3.0 X 103 N/m Maximum
mass displacement is 0 02 m (before the mass hits the stops).
Calculate (a) the maximum
measurable acceleration in g, and (b) the natural frequency.
Solution
We find the maximum acceleration when the maximum
displacement
occurs, from Equation (5.26).
a.
-
National Instruments Measurement Fundamentals Series
32
or because
b. The natural frequency is given by Equation (5.27).
Measuring Strain with Strain Gages
What Is Strain? Strain is the amount of deformation of a body
due to an applied force. More
specifically, strain (e) is defined as the fractional change in
length, as shown in Figure 1.
Figure 1. Definition of Strain
Strain can be positive (tensile) or negative (compressive).
Although dimensionless, strain is
sometimes expressed in units such as in./in. or mm/mm. In
practice, the magnitude of measured
strain is very small. Therefore, strain is often expressed as
microstrain (me), which is e x 10-6
.
When a bar is strained with a uniaxial force, as in Figure 1, a
phenomenon known as Poisson Strain
-
National Instruments Measurement Fundamentals Series
33
causes the girth of the bar, D, to contract in the transverse,
or perpendicular, direction. The
magnitude of this transverse contraction is a material property
indicated by its Poisson's Ratio. The
Poisson's Ratio n of a material is defined as the negative ratio
of the strain in the transverse
direction (perpendicular to the force) to the strain in the
axial direction (parallel to the force), or n
= eT/e. Poisson's Ratio for steel, for example, ranges from 0.25
to 0.3.
The Strain Gage: While there are several methods of measuring
strain, the most common is with a
strain gage, a device whose electrical resistance varies in
proportion to the amount of strain in the
device. The most widely used gage is the bonded metallic strain
gage.
The metallic strain gage consists of a very fine wire or, more
commonly, metallic foil arranged in a
grid pattern. The grid pattern maximizes the amount of metallic
wire or foil subject to strain in the
parallel direction (Figure 2). The cross-sectional area of the
grid is minimized to reduce the effect
of shear strain and Poisson Strain. The grid is bonded to a thin
backing, called the carrier, which is
attached directly to the test specimen. Therefore, the strain
experienced by the test specimen is
transferred directly to the strain gage, which responds with a
linear change in electrical resistance.
Strain gages are available commercially with nominal resistance
values from 30 to 3000 , with
120, 350, and 1000 being the most common values.
Figure 2. Bonded Metallic Strain Gage
It is very important that the strain gage be properly mounted
onto the test specimen so that the
strain is accurately transferred from the test specimen, through
the adhesive and strain gage
backing, to the foil itself.
A fundamental parameter of the strain gage is its sensitivity to
strain, expressed quantitatively as
the gage factor (GF). Gage factor is defined as the ratio of
fractional change in electrical resistance
to the fractional change in length (strain):
The gage factor for metallic strain gages is typically around
2.
-
National Instruments Measurement Fundamentals Series
34
Strain Gage Measurement: In practice, strain measurements rarely
involve quantities larger than a
few millistrain (e x 10-3
). Therefore, to measure the strain requires accurate
measurement of very
small changes in resistance. For example, suppose a test
specimen undergoes a strain of 500 me. A
strain gage with a gage factor of 2 will exhibit a change in
electrical resistance of only 2 (500 x 10-6
)
= 0.1%. For a 120 gage, this is a change of only 0.12 .
To measure such small changes in resistance, strain gages are
almost always used in a bridge
configuration with a voltage excitation source. The general
Wheatstone bridge, illustrated in
Figure 3, consists of four resistive arms with an excitation
voltage, VEX, that is applied across the
bridge.
Figure 3. Wheatstone Bridge
The output voltage of the bridge, VO, is equal to:
From this equation, it is apparent that when R1/R2 = R4/R3, the
voltage output VO is zero. Under
these conditions, the bridge is said to be balanced. Any change
in resistance in any arm of the
bridge results in a nonzero output voltage.
Therefore, if you replace R4 in Figure 3 with an active strain
gage, any changes in the strain gage
resistance will unbalance the bridge and produce a nonzero
output voltage. If the nominal
resistance of the strain gage is designated as RG, then the
strain-induced change in resistance, DR,
can be expressed as DR = RGGFe, from the previously defined Gage
Factor equation. Assuming
that R1 = R2 and R3 = RG, the bridge equation above can be
rewritten to express VO/VEX as a function
of strain (see Figure 4). Note the presence of the 1/(1+GFe/2)
term that indicates the nonlinearity
of the quarter-bridge output with respect to strain.
-
National Instruments Measurement Fundamentals Series
35
Figure 4. Quarter-Bridge Circuit
Ideally, we would like the resistance of the strain gage to
change only in response to applied
strain. However, strain gage material, as well as the specimen
material to which the gage is
applied, also responds to changes in temperature. Strain gage
manufacturers attempt to minimize
sensitivity to temperature by processing the gage material to
compensate for the thermal
expansion of the specimen material for which the gage is
intended. While compensated gages
reduce the thermal sensitivity, they do not totally remove
it.
By using two strain gages in the bridge, you can further
minimize the effect of temperature. For
example, Figure 5 illustrates a strain gage configuration where
one gage is active (RG + DR) and a
second gage is placed transverse to the applied strain.
Therefore, the strain has little effect on the
second gage, called the dummy gage. However, any changes in
temperature affect both gages in
the same way. Because the temperature changes are identical in
the two gages, the ratio of their
resistance does not change, the voltage VO does not change, and
the effects of the temperature
change are minimized. NOTE: In the Wheatstone Bridge
configuration, the active gage and the
dummy gage should be on the same vertical leg of the bridge.
Figure 5. Use of Dummy Gage to Eliminate Temperature Effects
The sensitivity of the bridge to strain can be doubled by making
both gages active in a half-bridge
configuration. For example, Figure 6 illustrates a bending beam
application with one bridge
mounted in tension (RG + DR) and the other mounted in
compression (RG - DR). This half-bridge
configuration, whose circuit diagram is also illustrated in
Figure 6, yields an output voltage that is
linear and approximately doubles the output of the
quarter-bridge circuit.
-
National Instruments Measurement Fundamentals Series
36
Figure 6. Half-Bridge Circuit
Finally, you can further increase the sensitivity of the circuit
by making all four of the arms of the
bridge active strain gages in a full-bridge configuration. The
full-bridge circuit is shown in Figure 7.
Figure 7. Full-Bridge Circuit
The equations given here for the Wheatstone bridge circuits
assume an initially balanced bridge
that generates zero output when no strain is applied. In
practice, however, resistance tolerances
and strain induced by gage application generate some initial
offset voltage. This initial offset
voltage is typically handled in two ways. First, you can use a
special offset-nulling, or balancing,
circuit to adjust the resistance in the bridge to rebalance the
bridge to zero output. Alternatively,
you can measure the initial unstrained output of the circuit and
compensate in software. This topic
will be discussed in greater detail later.
The equations given above for quarter-, half-, and full-bridge
strain gage configurations assume
that the lead wire resistance is negligible. While ignoring the
lead resistance may be beneficial to
understanding the basics of strain gage measurements, doing so
in practice can be a major source
of error. For example, consider the 2-wire connection of a
strain gage shown in Figure 8a. Suppose
each lead wire connected to the strain gage is 15 m long with
lead resistance RL equal to 1 .
Therefore, the lead resistance adds 2 of resistance to that arm
of the bridge. Besides adding an
offset error, the lead resistance also desensitizes the output
of the bridge.
You can compensate for this error by measuring the lead
resistance RL and accounting for it in the
strain calculations. However, a more difficult problem arises
from changes in the lead resistance
due to temperature fluctuations. Given typical temperature
coefficients for copper wire, a slight
change in temperature can generate a measurement error of
several microstrain.
-
National Instruments Measurement Fundamentals Series
37
Using a 3-wire connection can eliminate the effects of variable
lead wire resistance because the
lead resistance affects adjacent legs of the bridge. As seen in
Figure 8b, changes in lead wire
resistance, RL2, do not change the ratio of the bridge legs R3
and RG. Therefore, any changes in
resistance due to temperature cancel out each other.
Figure 8. 2-Wire and 3-Wire Connections of Quarter-Bridge
Circuit
Signal Conditioning for Strain Gages: Strain gage measurement
involves sensing extremely small
changes in resistance. Therefore, proper selection and use of
the bridge, signal conditioning,
wiring, and data acquisition components are required for
reliable measurements. To ensure
accurate strain measurements, it is important to consider the
following:
Bridge completion
Excitation
Remote sensing
Amplification
Filtering
Offset
Shunt calibration
Bridge Completion Unless you are using a full-bridge strain gage
sensor with four active gages,
you need to complete the bridge with reference resistors.
Therefore, strain gage signal
conditioners typically provide half-bridge completion networks
consisting of high-precision
reference resistors. Figure 9a shows the wiring of a half-bridge
strain gage circuit to a conditioner
with completion resistors R1 and R2.
-
National Instruments Measurement Fundamentals Series
38
Figure 9a. Connection of Half-Bridge Strain Gage Circuit
Excitation Strain gage signal conditioners typically provide a
constant voltage source to power
the bridge. While there is no standard voltage level that is
recognized industry wide, excitation
voltage levels of around 3 and 10 V are common. While a higher
excitation voltage generates a
proportionately higher output voltage, the higher voltage can
also cause larger errors because of
self-heating.
Remote Sensing If the strain gage circuit is located a distance
away from the signal conditioner
and excitation source, a possible source of error is voltage
drop caused by resistance in the wires
connecting the excitation voltage to the bridge. Therefore, some
signal conditioners include a
feature called remote sensing to compensate for this error.
Remote sense wires are connected to
the point where the excitation voltage wires connect to the
bridge circuit, as seen in Figure 9b. The
extra sense wires serve to regulate the excitation supply
through negative feedback amplifiers to
compensate for lead losses and deliver the needed voltage at the
bridge.
Figure 9b. Remote Sensor Error Compensation
Amplification The output of strain gages and bridges is
relatively small. In practice, most strain
gage bridges and strain-based transducers output less than 10
mV/V (10 mV of output per volt of
excitation voltage). With 10 V excitation, the output signal is
100 mV. Therefore, strain gage signal
conditioners usually include amplifiers to boost the signal
level to increase measurement
resolution and improve signal-to-noise ratios.
Filtering Strain gages are often located in electrically noisy
environments. It is therefore essential
to be able to eliminate noise that can couple to strain gages.
Lowpass filters, when used with
strain gages, can remove the high-frequency noise prevalent in
most environmental settings.
-
National Instruments Measurement Fundamentals Series
39
Offset Nulling When a bridge is installed, it is very unlikely
that the bridge will output exactly
zero volts when no strain is applied. Slight variations in
resistance among the bridge arms and lead
resistance will generate some nonzero initial offset voltage.
Offset nulling can be performed by
either hardware or software:
1. Software Compensation With this method, you take an initial
measurement before strain
input is applied, and use this offset to compensate subsequent
measurements. This method is
simple, fast, and requires no manual adjustments. The
disadvantage of the software compensation
method is that the offset of the bridge is not removed. If the
offset is large enough, it limits the
amplifier gain you can apply to the output voltage, thus
limiting the dynamic range of the
measurement.
2. Offset-Nulling Circuit The second balancing method uses an
adjustable resistance, a
potentiometer, to physically adjust the output of the bridge to
zero. By varying the resistance of
potentiometer, you can control the level of the bridge output
and set the initial output to zero
volts.
Shunt Calibration The normal procedure to verify the output of a
strain gage measurement
system relative to some predetermined mechanical input or strain
is called shunt calibration.
Shunt calibration involves simulating the input of strain by
changing the resistance of an arm in the
bridge by some known amount. This is accomplished by shunting,
or connecting, a large resistor of
known value (Rs) across one arm of the bridge, creating a known
DR as seen in Figure 9c. The
output of the bridge can then be measured and compared to the
expected voltage value. The
results are used to correct span errors in the entire
measurement path, or to simply verify general
operation to gain confidence in the setup.
Figure 9c: Shunt Resistor connected across R3
DAQ Systems for Strain Gauge Measurements:
Using cDAQ with Strain Gages
NI CompactDAQ hardware provides the plug-and-play simplicity of
USB to sensor and electrical
measurements. The NI CompactDAQ system consists of an NI
cDAQ-9172 8-slot USB 2.0-compliant
-
National Instruments Measurement Fundamentals Series
40
chassis that can hold up to eight C Series I/O modules and
connect to a PC using a 1.8 m USB cable.
NI CompactDAQ delivers fast and accurate measurements with more
than 45 self-contained
measurement modules available. Since all circuitry required for
the specific measurement is
contained in the C Series I/O module itself, you can connect
many different types of sensors,
including strain gages, directly to the modules.
Figure 10: NI CompactDAQ cDAQ-9172 Chassis with C Series I/O
Modules
The NI 9219 is a 4-channel universal C Series module designed
for multipurpose testing in any NI
CompactDAQ or CompactRIO chassis. With the NI 9219, you can
measure several signals from
sensors such as strain gages, RTDs, thermocouples, load cells,
and other powered sensors. The
channels are individually selectable, so you can perform a
different measurement type on each of
the four channels. The NI 9219 uses 6-position spring terminal
connectors in each channel for
direct signal connectivity and contains built-in quarter, half,
and full-bridge support.
For C Series I/O modules specifically designed for the
measurement of strain gages, National
Instruments offers the NI 9235, NI 9236, and the NI 9237. These
bridge modules contain all the
signal conditioning required to power and measure bridge-based
sensors simultaneously. The NI
9235 and NI 9236 are for high count applications with completion
for quarter bridge sensors. The
NI 9237 supports up to four full and half bridge sensors and can
measure from quarter bridge
strain gages using a completion accessory.
The NI 9237 can perform offset/null as well as shunt calibration
and remote sense, making the
module the best choice for strain and bridge measurements.
Recommended Starter Kit for Strain Gage NI CompactDAQ
System:
1. cDAQ-9172 chassis
2. NI 9237 with an RJ50 cable and an NI 9949 (full and half
bridge) or NI 9944/NI 9945 (quarter
bridge)
3. Refer to ni.com/sensors for recommended sensor vendors
Using SCXI with Strain Gages
-
National Instruments Measurement Fundamentals Series
41
National Instruments SCXI is a signal conditioning system for
PC-based instrumentation
applications. An SCXI system consists of a shielded chassis that
houses a combination of signal
conditioning input and output modules, which perform a variety
of signal conditioning functions.
You can connect many different types of sensors, including
strain gages, directly to SCXI modules.
The SCXI system operates as a front-end signal conditioning
system for PC plug-in Data Acquisition
devices (USB, PCI, and PCMCIA) or PXI DAQ modules.
Figure 11. SCXI Signal Conditioning System
The SCXI-1520 is an 8-channel universal strain gage input module
that offers a variety of features
for strain measurements. With this single module, signals from
strain, force, torque, and pressure
sensors can be easily read. The SCXI-1520 also offers a
programmable amplifier and programmable
4-pole Butterworth filter on each channel, and simultaneous
sampling with track-and-hold
circuitry. In addition, the SCXI-1520 system offers a
half-bridge completion resistor network in the
module and a socketed 350 W quarter-bridge completion resistor.
Table 1 summarizes some
additional features of the SCXI-1520 that relate to strain gage
measurements.
Table 1. SCXI-1520 Features for Strain Gages
Number of channels 8
Multiplexer scan rate Up to 333 kS/s1
Amplifier gain 1 to 1000
-
National Instruments Measurement Fundamentals Series
42
Excitation voltage source 0.0 to 10.0 V in 0.635 V
increments
Excitation current drive 29 mA throughout
excitation voltage range
Half-bridge completion Yes
Offset nulling Yes
Shunt calibration Yes
Remote excitation sensing Yes
1 Multiplexer scan rate depends on the DAQ device.
Recommended Starter Kit for Strain Gage SCXI DAQ System:
1. USB-1600 USB Data Acquisition and Control Module for SCXI
2. SCXI-1000 chassis
3. SCXI-1520 with SCXI-1314 terminal block
4. Refer to ni.com/sensors for recommended sensor vendors
Using SCC with Strain Gage Measurements
National Instruments SCC provides portable, modular signal
conditioning for DAQ systems. SCC can
condition a variety of analog I/O and digital I/O signals. SCC
DAQ systems include an SC-2345
Series shielded carrier, SCC modules, a cable, and a DAQ device.
Figure 12 illustrates an SC-2345
carrier with SCC modules.
-
National Instruments Measurement Fundamentals Series
43
Figure 12. SC-2345 with SCC Modules
SCC-SG Series modules can be used for conditioning quarter-,
half-, and full-bridge strain gages.
Each module has two strain gage input channels, offset nulling
circuitry for each channel, and a 2.5
V excitation circuit. Each input channel includes an
instrumentation amplifier with differential
inputs and a fixed gain of 100. The output of each amplifier is
filtered and buffered to prevent
settling time delays. The SCC-SG01 works with 120 quarter-bridge
strain gages, and the SCC-
SG02 works with 350 quarter-bridge strain gages. The SCC-SG03
works with half-bridge strain
gages and the SCC-SG04 works with full-bridge strain gages.
Figure 12 illustrates the block diagram
of the SCC-SG01/01 modules.
Figure 12. Block Diagram of the SCC-SG01, SCC-SG02
Quarter-Bridge Modules
-
National Instruments Measurement Fundamentals Series
44
The SCC-SG11 is a dual-channel shunt calibration module for use
with the SCC-SG series modules.
Each channel includes two terminals for wiring a switched 301 k,
1 percent, 1/4 resistor across
both channels of a module by writing a logic high to the digital
line controlling the SCC-SG11. You
can disable shunt calibration by writing a logic low to the same
digital line. Figure 14 illustrates an
example of using the SCC-SG11 shunt calibration module with the
SCC-SG02 module.
Figure 13. Using the SCC-SG11 Shunt Calibration Module with the
SCC-SG02
Recommended Starter Kit for Strain Gage SCC DAQ System:
1. PCI-6221 DAQ board
2. SC-2345 module carrier
3. SCC-SG01/02 (quarter-bridge), SCC-SG03 (half-bridge), or
SCC-SG04 (full-bridge)
4. SCC-SG11 (shunt calibration)
5. Refer to ni.com/sensors for recommended strain gages and
full-bridge sensors.
Voltage Measurements: How-To Guide
Voltage Measurement Overview
Voltage is the difference of electrical potential between two
points of an electrical or electronic
circuit, expressed in volts.It measures the potential energy of
an electric field to cause an electric
current in an electrical conductor.
Most measurement devices can measure, or read, voltage. Two
common voltage measurements
are direct current (DC) and alternating current (AC).
Although voltage measurements are the simplest of the different
types of analog measurements,
they present unique challenges due to noise considerations.
How to Make a DC Voltage Measurement
Although many sensors output DC voltages that you can measure
with a data acquisition device,
the primary concern of this white paper is to examine general DC
measurements that do not
involve an intermediary sensor setup.
Voltage Measurement Fundamentals
-
National Instruments Measurement Fundamentals Series
45
To understand how to measure voltages, it is essential to
understand the background of how you
take the measurement. Essentially, voltage is the electrical
potential difference between two
points of interest in an electrical circuit. However, a common
point of confusion is how the
measurement reference point is determined. The measurement
reference point is the voltage
level at which the measurement is referenced to.
Reference Point Methods
There are essentially two methods to measure voltages: ground
referenced and differential.
Ground Referenced Voltage Measurement
One method is to measure voltage with respect to a common, or a
ground point. Oftentimes,
these grounds are stable and unchanging and are most commonly
around 0 V. Historically, the
term ground originated from the usual application of ensuring
the voltage potential is at 0 V by
connecting the signal directly to the earth.
You can use ground referenced input connections for any channel
that meets any of the following
conditions:
The input signal is high-level (greater than 1 V)
The leads connecting the signal to the device are less than 10
ft (3 m)
The input signal can share a common reference point with other
signals
The ground reference is provided by either the device taking the
measurement or by the external
signal being measured. When the ground is provided by the
device, this setup is called ground
referenced single-ended mode (RSE), and when the ground is
provided by the signal, the setup is
called nonreferenced single-ended mode (NRSE).
Most instruments offer similar pin configurations for analog
input measurements. The following
example demonstrates this type of measurement using an NI
CompactDAQ chassis and an NI 9205
analog input module (see Figure 1).
Figure 1. NI CompactDAQ Chassis and NI 9205 Analog Input
Module
-
National Instruments Measurement Fundamentals Series
46
Figure 2 shows the connection diagram for RSE voltage
measurements using an NI cDAQ-9172
chassis with an NI 9205 as well as the pinouts for the module.
In Figure 2, Pin 1 corresponds to the
Analog Input 0 channel and Pin 17 corresponds to the common
ground.
Figure 2. Ground Referenced Single-Ended Mode
Figure 3 shows the connection diagram for NRSE voltage
measurements using a cDAQ-9172 with
an NI 9205. In the figure, Pin 1 corresponds to the Analog Input
0 channel and Pin 35
corresponds to the Analog Input Sense channel. This channel,
specifically for NRSE
measurements, can detect the ground voltage provided by the
signal.
Figure 3. Non-referenced Single-Ended Mode
-
National Instruments Measurement Fundamentals Series
47
Differential Voltage Measurement
Another method of measuring voltage is to determine the
differential voltage between two
separate points in an electrical circuit. For example, to
measure the voltage across a single
resistor, you measure the voltage at both ends of the resistor.
The difference between the
voltages is the voltage across the resistor. Usually,
differential voltage measurements are useful in
determining the voltage that exists across individual elements
of a circuit, or if the signal sources
are noisy.
You can use differential input connections for any channel that
meets any of the following
conditions:
The input signal is low-level (less than 1 V)
The leads connecting the signal to the device are greater than 3
m (10 ft)
The input signal requires a separate ground reference point or
return signal
The signal leads travel through noisy environments
Figure 4 illustrates the connection diagram for differential
voltage measurements using a cDAQ-
9172 with an NI 9205. In the figure, Pin 1 corresponds to the
Analog Input 0 channel and Pin 19
corresponds to the Analog Input 8 channel.
In differential mode, the negative signal is wired to the analog
pin directly facing the analog
channel that is connected to the positive signal. For example,
Analog Input 0 would be
connected to positive, and Analog Input 8 would be connected to
the negative signals, and
Analog Input 1 for positive and Analog Input 9 for negative and
so on. The disadvantage of
differential mode is that it effectively reduces the number of
analog input measurement channels
by half.
-
National Instruments Measurement Fundamentals Series
48
Figure 4. Differential Mode
Types of Signal Sources
Before configuring the input channels and making signal
connections, you must determine
whether the signal sources are floating or ground
referenced.
Floating Signal Sources
A floating signal source is not connected to the building ground
system but has an isolated ground
reference point. Some examples of floating signal sources are
outputs of transformers,
thermocouples, battery-powered devices, optical isolators, and
isolation amplifiers. An instrument
or device that has an isolated output is a floating signal
source. The ground reference of a floating
signal must be connected to the ground of the device to
establish a local or onboard reference for
the signal. Otherwise, the measured input signal varies as the
source floats outside the common-
mode input range.
Ground Referenced Signal Sources
A ground referenced signal source is connected to the building
system ground, so it is already
connected to a common ground point with respect to the device,
assuming that the measurement
device is plugged into the same power system as the source.
Non-isolated outputs of instruments
and devices that plug into the building power system fall into
this category. The difference in
ground potential between two instruments connected to the same
building power system is
typically between 1 and 100 mV, but the difference can be much
higher if power distribution
circuits are improperly connected. If a grounded signal source
is incorrectly measured, this
difference can appear as measurement error. Following the
connection instructions for grounded
signal sources can eliminate the ground potential difference
from the measured signal.
Figure 5 shows the different types of signal source types as
well as the optimal connection
diagrams based on the individual measurement method. Please note
that depending on the type
of signal, a particular voltage measurement method may provide
better results than others.
-
National Instruments Measurement Fundamentals Series
49
Figure 5. Common Signal Source Types versus Recommended Input
Configurations
High-Voltage Measurements and Isolation
There are many issues to consider when measuring higher
voltages. When specifying a data
acquisition system, the first question you should ask is whether
the system will be safe. Making
high-voltage measurements can be hazardous to your equipment, to
the unit under test, and even
to you and your colleagues. To ensure that your system is safe,
you should provide an insulation
barrier between the user and hazardous voltages with isolated
measurement devices.
Isolation, a means of physically and electrically separating two
parts of a measurement device, can
be categorized into electrical and safety isolation. Electrical
isolation pertains to eliminating
ground paths between two electrical systems. By providing
electrical isolation, you can break
ground loops, increase the common-mode range of the data
acquisition system, and level shift the
signal ground reference to a single system ground. Safety
isolation references standards that have
specific requirements for isolating humans from contact with
hazardous voltages. It also
characterizes the ability of an electrical system to prevent
high-voltage and transient voltages to
-
National Instruments Measurement Fundamentals Series
50
be transmitted across its boundary to other electrical systems
with which the user may come in
contact.
Incorporating isolation into a data acquisition system has three
primary functions: preventing
ground loops, rejecting common-mode voltage, and providing
safety.
Ground Loops
Ground loops are the most common source of noise in data
acquisition applications. They occur
when two connected terminals in a circuit are at different
ground potentials, causing current to
flow between the two points. The local ground of your system can
be several volts above or below
the ground of the nearest building, and nearby lightning strikes
can cause the difference to rise to
several hundreds or thousands of volts. This additional voltage
itself can cause significant error in
the measurement, but the current that causes it can couple
voltages in nearby wires as well. These
errors can appear as transients or p