Embed Size (px)
Citation preview

Sensory Interfaces for an Intelligent
Surgical Box Trainer
Joshua ClemensSarah SengKrystal York
Western Michigan University

Contents1. Background
2. Need Statement
3. Box Trainer and Set-Up
4. Specifications
5. Hardware
Discovery Board
Force Sensor
Grasper Tools
Accelerometer
Push Button
Non-Conductive Enclosure
Schematics
6. Calibrations
7. Software
8. Testing Procedure
9. Testing Performance
10. Results
11. Recommendations
12. Questions

Background• Fundamentals of Laparoscopic Surgery (FLS)
program was created to educate and test surgical residents and practicing surgeons
• Students must perform a physical test using an intelligent surgical box trainer
• Laparoscopic surgery is a form of minimally invasive surgery with a variety of benefits:o Smaller scarso Shorter recovery timeo Shorter hospital stays for patients
https://assets.limbsandthings.com/products/fls_simcart_and_
trainer_720x720_72_RGB.jpg

Need StatementVarious sensory interfaces need to be
implemented to improve the FLS
(Fundamentals of Laparoscopic Surgery)
Trainer System. Sensors are needed to
measure the applied force of the grasper tool,
measure wrist orientation, and measure the
time it takes for the test to be completed. This
information needs to interface with a
microcontroller to upload the data to a
computer. This will supply performance
feedback to surgical students so they can
further improve their laparoscopic surgery
skills.

Box Trainer and Set-Up• Different laparoscopic tasks performed using box trainer:
o Peg transfer
o Precision cutting
o Ligating loop
o Suture with extracorporeal knot
o Suture with intracorporeal knot
https://www.youtube.com/watch?v=H5DZst68mMc&t=2s

SpecificationsSpecification R, G, or P
Sensor able to accurately measure pressure from 0.1 to 4 PSI R
Sensor able to accurately measure a radial orientation range of 210º R
Sensor able to mark the beginning and ending of an FLS Trainer test R
All sensors must weigh less than 1 oz R
Discernable analog or digital signals from sensors to microcontroller R
Microcontroller system
STM32F4 Discovery Board
R
P
5 VDC power source R
Key:
R: RequirementG: GoalP: Preference

Specifications
C programming R
Serial connection required from microcontroller to PC R
Data stored in accessible format
Excel file
R
P
The microcontroller and other auxiliary electronics should be contained in a
nonconductive enclosure
R
The enclosure should be mounted on the FLS Trainer cart R
The enclosure should weigh less than 1 lb G
Components should ideally require 3.3 VDC or 5 VDC power G
Specification R, G, or P

Hardware
M ichelle Valent e

Discovery Board• STM32F407VG Discovery Board
microcontroller• ARM Cortex-M4 processor• ST-Link: embedded debugger & programmer
o Sensor data tracking and storage
• 14 timers, 40 channelso Tracking test duration
• 3 analog to digital converters (ADC), 15 channels eacho Accelerometer signals
• 3 I2C Interfaceso Force sensor signals
• Sensors hardwired to GPIO pins using multi-
conductor 24 AWG signal cable

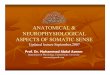
Force Sensor & Interface Board• SingleTact tactile capacitive force sensor• Measures up to 22 pounds of force
across an 8 mm surface• Sensor applied to the handle of each
grasper tool• Generates an analog signal between 0
and 2 V in response to force and accepts supply voltages between 3.7 and 12 Vo This analog signal will run to I2C interface
board
http://www.robotshop.com/media/f iles/pdf/SingleTact_Manual.pdf
• Interface boardo Supplies power to the sensoro Reads analog signalo Converts sensor analog output to a 10-
bit digital valueo Stores digital value to internal memory
• I2C compatible serial interface• 140 Hz refresh rate
SingleTact CapacitiveForce Sensor
Single TactInterface Board

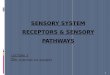
Grasper Tools• Capacitive force sensors attached to handles of grasper tools
• The force applied at the handle is used calculate the applied force on tissue at the end of the tool
o Force must be measured on handle so it does not interfere with smaller grasper end
https://www.fls-products.com/products/maryland-dissector-fls-approved
Measure
force here
To find force
applied here

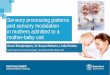
Accelerometer• Acceleration measured in three
directions is used to calculate position
of sensor
• Attached to band on user’s wrist to
minimize interference with test taking
• Three independent, non-proportional
analog outputs for x-, y-, and z-
acceleration
https://cdn.sparkfun.com//assets/parts/2/7/6/8/09269-01.jpg
https://www.dfrobot.com/wiki/index.php/How_to_Use_a_Three-
Axis_Accelerometer_for_Tilt_Sensing

Push Button• Start switch sends signal to
initialize the collection of data
• Push button operates timer input
to track test duration
• Needs to be pushed by user
inside the box with the grasper
tool
○ Printed using 3D printer in ECE Senior
Design Lab
http://www.ckswitches.com/media/1269/pts645.png

Non-Conductive Enclosure• Modeled in AutoCAD
o Capable of designing an enclosure that met our
specific needs
i. Big enough to hold the microcontroller and
circuit board
ii. Small enough to fit comfortably inside the
box trainer
iii. House all electronics except external sensors
• 3D printer used to print out design
o Printer available in ECE Senior Design Lab
o ABS and PLA plastics both used to make
enclosure
i. Typical plastics used with 3D printing
ii. Both are non-conductive

Schematic

Software• Timer and Push Button
o Timer 5: 32-bit timer
o Triggers every millisecond
o Translates timer counter iterations to a
clock format (minutes: seconds:
milliseconds)
• Accelerometer
o Three ADC modules
o Conversions stored in array for averaging
o Averager output normalized
o Normalized magnitudes converted to
• Force Sensor
o Both force sensors on the same I2C bus
o Bus consists of two lines (clock and data)
o The Discovery Board communicates by
toggling the data pin in sync with the clock
o Each force sensor is assigned a different 7-bit
address
o Discovery Board can instruct force sensors to
output memory contents on the data line of
the I2C bus
• Communication with the PC
o STMStudio

Software Block Diagram

Calibration & Verification• Push Button
o Internal clocks with specified
frequencies
o Verified with stopwatch
• Force Sensor
o Pre-calibrated interface board that
matches with their sensor
o Verified with digital scale
• Accelerometer
o X, Y, and Z signals were conditioned to
proportional to one another
o Reconfigurable upon system startup
o Verified with protractor

Testing Procedure1. Put on wristband
2. Flip power switch to “On” position (LED on switch will light up)
3. Hold wrist in base position shown in figure to the right
4. Press button labeled “X” to calibrate x-axis base positions
5. Press button labeled “Y” to calibrate y-axis base positions
6. Press button labeled “Z” to calibrate z-azis base positions
7. Grab both grasper tools
8. Press the start/stop button on top of the
enclosure (green LED will light up when timer begins)
9. Perform necessary tasks
10.Press the start/stop button on top of the
enclosure (green LED will turn off when the timer ends)

Test Performance Video

Test Performance Video

Specification ResultsSpecification R, G, or P Completed
Sensor able to accurately measure pressure from 0.1
to 4 PSI R✔
Sensor able to accurately measure a radial orientation
range of 210º R ✔
Sensor able to mark the beginning and ending of an
FLS Trainer test R ✔
All sensors must weigh less than 1 ozR ✔
Discernable analog or digital signals from sensors to
microcontroller R ✔
Microcontroller system
STM32F4 Discovery Board
R
P
✔
✔
5 VDC power sourceR ✔
Key:
R: RequirementG: GoalP: Preference

Specification ResultsC programming R ✔Serial connection required from microcontroller to
PC R ✔Data stored in accessible format
Excel fileR
P
✔✔
The microcontroller and other auxiliary electronics
should be contained in a nonconductive enclosure R ✔The enclosure should be mounted on the FLS Trainer
cart R ✔The enclosure should weigh less than 1 lb G ✔Components should ideally require 3.3 VDC or 5
VDC power G ✔
All specifications attempted and completed. Project is 100% complete.
Specification R, G, or P Completed

Results• Successfully programmed microcontroller to gather and coordinate
sensor interfaces
• Successfully implemented capacitive force sensor and interface board in
accurately measuring force on grasper tool
• Successfully converted accelerometer data to wrist orientation
information
• Used STMStudio to read and record sensor interface information
o Modified original plan for UART communication with local PC

Bill of MaterialsItem Quantity Part Number Cost
Accelerometer 3 ADXL335 $44.85
Force Sensor 2 S8-100N $149.90
Discovery Board
Microcontroller1 STM32F407VG $19.90
8 Pin Male DIN
Connectors3 CP-1080-ND $4.20
8 Pin Female DIN
Connector3 CP-3180-ND $4.11
O Ring Kit 1 $8.00
Push Buttons 100 PTS645 $10.41
Total $241.37

Recommendations• Several improvements can be made to improve performance and
usefulness:
o Use both an accelerometer & gyroscope, or inclinometer
to accurately monitor wrist orientation
o Have accelerometer and force sensor wirelessly
communicate with microcontroller
o Develop a more intuitive user interface for
computer set up
o Implement a self-test and calibration board to
make setup easier and faster
o Determine a more robust relationship between
force applied at handle and at grasper

Thank You
WMU ECE Department
Dr. Janos Grantner
Aous Hammad Kurdi
Mohammed Yasser O Muhieldeen Al Gailani
Bob Makin

Questions?