Embed Size (px)
Citation preview

1
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Setting procedure, EVS

2
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Contents Chapter Page
Introduction ............................................................................................................................ 3
Before setting up the EVS System ........................................................................................ 4
Different types of crane installation ...................................................................................... 4
Setting EVS parameters ......................................................................................................... 8
Monitoring parameters in relation to EVS .......................................................................... 12
Replacing an EVS controller ................................................................................................ 13
Setting procedure ................................................................................................................. 14
Safety when setting up the EVS System ............................................................................. 14
Preparing for the setting procedure .................................................................................... 15
Setting procedure, CGW 5355 Guide .................................................................................. 16
Tips for setting up EVS ........................................................................................................ 23
Criteria for stability .............................................................................................................. 24
Stability test, setting of "Max stable load" ......................................................................... 26
Control and optimisation of the EVS settings .................................................................... 27
Maximum speeds and EVS speeds ..................................................................................... 28
Adjustment of EVS parameters ........................................................................................... 29
Setting of EVS combined with mounting of hoist .............................................................. 31
EVS and personnel basket................................................................................................... 31
Procedure for manual setting of the EVS system .............................................................. 32
Step-by-step manual setting of EVS ................................................................................... 33
Setting EVS-H ....................................................................................................................... 36

3
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Introduction EVS (Electronic Vehicle Stability) is a safety system, which monitors the stability of the vehicle during loader crane operation in the critical working areas. All crane functions that might increase the heel are stopped at the max. permissible heel limit. Generally the max. load moment of the crane cannot be utilized in the entire working area, due to lacking stability of the vehicle. If the crane is equipped with an EVS system, its lifting capacity can constantly be utilized to its max. limit in relation to the stability of the vehicle. When a crane is ordered with an EVS system, HMF carries out the basic parameter settings. But certain parameters cannot be pre-set from HMF, as they are dependent on the vehicle on which the crane is mounted. Each installation has its own characteristics: Crane size in relation to the size of the vehicle, positioning of the crane on the vehicle, spring suspension of the vehicle, etc. When a crane equipped with an EVS system is mounted on the vehicle, the EVS system has to be adjusted so that it functions to its optimum on the vehicle in question. It is important that the crane fitter follows the EVS setting procedure thoroughly and that he carefully carries out the different parameter settings. Only if these conditions are fulfilled, and if the crane is operated correctly, the EVS system will ensure the optimal stability of the vehicle. If the EVS system has been adjusted incorrectly, it might entail that the vehicle becomes unstable during crane operation, and in the worst case turns over, or that the lifting capacity of the crane is not utilized to its optimum in relation to the stability of the vehicle. Please note! When the crane is fitted on the vehicle, the crane fitter is responsible for the EVS system being adjusted correctly. HMF does not assume any responsibility for any accidents and the consequences of these or malfunction of a crane function as a consequence of an insufficient or incorrect setting of the EVS system.

4
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Before setting up the EVS System To obtain a good understanding of what influence the different settings have on the function of the EVS system, it is important to read all pages of the present set up guide. Furthermore it is presupposed that the following training course documentation has been read through: • The chapter "Stability monitoring - EVS" in the RCL 5300 Instruction Manual • Safety systems - stability • Service Terminal CGW 5355 Different types of crane installation During the setting procedure we distinguish between three (3) types of installation (vehicle/crane), which basically have different stability: A) Front-mounted crane on long chassis B) Front-mounted crane on short chassis (tractor unit) C) Rear-mounted crane on long chassis

5
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
A) Front-mounted crane on long chassis
Draw. of truck: As a general rule, the vehicle is unstable in the direction towards the front (Y1) and stable to the sides (X) and to the back (Y2). The EVS system is primarily meant to ensure the stability to the front and secondarily to the sides, if the stabilizer beams by mistake have not been completely extended before the stabilizer legs have been lowered.

6
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
B) Front-mounted crane on short chassis (tractor unit)
Draw. of truck: As a general rule, the vehicle is unstable in the direction towards the front (Y1) and to the sides (X). In most cases the stability will be satisfactory to the back (Y2). However this has to be checked. The EVS system is meant to ensure stability to the front and to the sides in the direction backwards.

7
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
C) Rear-mounted crane on long chassis
Draw. of truck: As a general rule, the vehicle is unstable to the sides (X). The vehicle is stable in the direction towards the front (Y1) and to the back (Y2). The EVS system is meant to ensure the stability to the sides.

8
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Setting EVS parameters Setting of the EVS system is carried out by means of a CGW 5355 service terminal. To make the EVS system function in the best possible way on the vehicle in question, a number of parameters must be activated and adjusted. The menu item, as well as the corresponding description of the functions and parameters, are indicated in the table below. Menu item in CGW 5355
Parameter description
1.1.1.1.1.18.1 Calibrate bypass - CBS
When the check box is ticked, "Calibrate bypass" (CBS) is activated. This function allows you to calibrate the EVS system even if the crane is loaded, as long as the boom system is above the truck body. When the boom system is positioned over the truck body, the vehicle does not tilt or does so only slightly (in the X direction), which enables you to perform calibration when starting the crane work. The function is used, e.g. when performing crane work where the vehicle is moved frequently and the crane is difficult to unload under the value at which the system normally requires calibration ("Max calibration"). Note: if the crane turns opposite standard mounting (C = 12 o'clock instead of C = 6 o'clock), the sensor must also be turned in the opposite direction.
1.1.1.1.1.18.2 Advanced
A general menu, containing general settings and specific settings for the directions X and Y.
1.1.1.1.1.18.3 Tilt Sensor
Press SET. Choose between different EVS controllers using ↑↓: AIC5062 or DPS. If the crane has an EVSC controller fitted, also select DPS. If the EVS system is selected, you must not select "None".
1.1.1.1.1.18.4 Mounted
Press SET. Choose between "Left" and "Right" using ↑↓: Left: Standard mounting, i.e. the side where the RCL controller is placed - is defined as the left side in the direction of travel. Right: is selected if the crane is oriented opposite the standard mounting.
1.1.1.1.1.18.2.1 General
A general menu containing general settings for the EVS system.
1.1.1.1.1.18.2.1.1Max Calibration
Indicates the max. permissible load on the crane (%) to be able to carry through a calibration of the EVS system. The EVS system is being calibrated, each time the stabilizer functions have been operated. "Max Calibration" is the dead load in percentage (the pressure in the boom cylinder), without any load in the hook, when the boom system is in basic position (the main boom approx. 15 degrees above horizontal and the jib in horizontal position), and the jib extensions are extended by approx. 1 metre. ”Max Calibration" is 20-30%, dependent on the number of extensions (dead load). With Fly-Jib it is further 10-15%.

9
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Menu item in CGW 5355
Parameter description
1.1.1.1.1.18.2.1.2 Max stable Load
The parameter "Max stable load" is pre-set from factory to a low percentage and used in connection with reduced stability because of reduced support of the vehicle. ”Max stable load” is the current load on the crane in %, by which the vehicle has reached maximum heel in the X- or Y1-direction, if one or both stabilizer beams are not extended, and the stabilizer legs have just been lowered to the ground.
If the vehicle is stable to the sides (X), the Y1 value is used. If the vehicle is not stable in any direction, the lowest value found in the Y1- or X-directions is used. The lifting capacity of the crane is reduced to ”Max stable load”, if the EVS system has not been calibrated after operating the stabilizer functions. For example the EVS system is not being calibrated if the load on the crane exceeds the value “Max Calibration”. The reduced lifting capacity - the "Max stable load" value - must be set by the crane fitter, so that vehicle stability is ensured when both stabilizer beams are retracted and both stabilizer legs are completely lowered. When changing: press SET and enter the numerical value which has appeared from the stability test. Note: The "Max stable load" value is the same as the value you can set in connection with "Safety systems, stability" in menu item 1.1.1.1.1.24.9.
1.1.1.1.1.18.2.1.3 Reduc. factor
”Reduc. Factor” (Reduction factor) has been pre-set from factory to 50%. In other words, when the heel of the vehicle is 50% of the max. permissible limit ("Max margin"), the crane's EVS speeds are activated. EVS-H Cranes without remote control have an HDL valve mounted. With the HDL valve ("Max Margin") activated, the oil flow from the pump is reduced to a level to which the HDL valve is set. The speed reduction is thus the same for all crane functions. EVS-D For cranes with remote control, the speed for the crane functions is reduced individually to "EVS-speed" under "Crane Speeds" in the CGW menu 1.1.1.1.2.10.1. Thus, the "Reduction factor" parameter means that the working speed of the crane is reduced right before an EVS stop as a consequence of the vehicle reaching the max. permissible heel.

10
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Menu item in CGW 5355
Parameter description
1.1.1.1.1.18.2.1.4 Crew. Factor
If the crane is mounted with personnel basket, the permissible heel of the vehicle in all directions (X, Y1 and Y2) is reduced to the percentage value indicated in “Crew Factor". ”Crew. factor” has been pre-set from factory to 40%. Check and adjust the ”Crew. factor” value as described in the chapter “EVS and personnel basket”.
1.1.1.1.1.18.2.1.5 SIM
When the check box is ticked, the "SIM" routine (Superior Inclination Monitoring) is activated. See more in the course module "Safety systems - stability". In the event of a sudden significant heel, the EVS system stops the crane movements within four seconds. For some crane uses with a major effect on the vehicle (e.g. when working with a grab), SIM need not be activated. This allows the crane to be operated out of an EVS stop with no waiting time. For all other crane uses, "SIM" must be activated.
1.1.1.1.1.18.2.2 X-axis
A general menu, containing general settings and specific settings for the X-direction.
1.1.1.1.1.18.2.2.1 Enable
When the check box is ticked, the EVS system is activated in the X-direction.
1.1.1.1.1.18.2.2.2 (X) Max margin
Indicates the max. permissible heel of the vehicle (degrees) in the X-direction at a 100% calibration, before the vehicle starts to become unstable. See the "Criteria for stability" section.
1.1.1.1.1.18.2.2.3 (X) Dead Load margin
Dead load heel* (degrees) in the X-direction. Indicates the heel of the vehicle at the dead load, when the boom system is in basic position and the extensions are extended by approx. 1 m.
1.1.1.1.1.18.2.2.4 Force cal angle
Indicates the maximum tolerated initial heel (degrees) in the X-direction for the vehicle to allow for calibration when switching from stabilizer mode to crane mode. The factory setting is 5.0 degrees. This value can be increased, but a subsequent stability test is needed with regard to the criteria for stability. See the "Criteria for stability" section.
1.1.1.1.1.18.2.2.5 Maximum
Indicates the maximum tolerated heel - the sum of the initial heel and "Max margin" in the X-direction - for the vehicle to allow for calibration when switching from stabilizer mode to crane mode. See more in the course module "Safety systems - stability".
1.1.1.1.1.18.2.3 Y-axis
A general menu, containing general settings and specific settings for the directions Y1 and Y2.
1.1.1.1.1.18.2.3.1 Enable
When the check box is ticked, the EVS system is activated in the directions Y1 and Y2.

11
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Menu item in CGW 5355
Parameter description
1.1.1.1.1.18.2.3.2 (Y1) Max margin
Indicates the max. permissible heel of the vehicle (degrees) in the Y1-direction at a 100% calibration, before the vehicle starts to become unstable. See the "Criteria for stability" section.
1.1.1.1.1.18.2.3.3 (Y1) Dead Load margin
Dead load heel* in the Y1-direction (degrees). Indicates the heel of the vehicle at the dead load, when the boom system is in basic position and the extensions are extended by approx. 1 m.
1.1.1.1.1.18.2.3.1 (Y1) Force cal angle
Indicates the maximum tolerated initial heel (degrees) in the Y1-direction for the vehicle to allow for calibration when switching from stabilizer mode to crane mode. The factory setting is 5.0 degrees. This value can be increased, but a subsequent stability test is needed with regard to the criteria for stability. See the "Criteria for stability" section.
1.1.1.1.1.18.2.3.5 (Y2) Max margin
Indicates the max. permissible heel of the vehicle (degrees) in the Y2-direction at a 100% calibration, before the vehicle starts to become unstable. See the "Criteria for stability" section.
1.1.1.1.1.18.2.3.6 (Y2) Dead Load margin
Dead load heel* in the Y2-direction (degrees). Indicates the heel of the vehicle at the dead load, when the boom system is in basic position and the extensions are extended by approx. 1 m.
1.1.1.1.1.18.2.3.7 (Y2) Force cal angle
Indicates the maximum tolerated initial heel (degrees) in the Y2-direction for the vehicle to allow for calibration when switching from stabilizer mode to crane mode. The factory setting is 5.0 degrees. This value can be increased, but a subsequent stability test is needed with regard to the criteria for stability. See the "Criteria for stability" section.
1.1.1.1.1.18.2.3.8 Y Maximum
Indicates the maximum tolerated heel - the sum of the initial heel and "Max margin" in the Y-direction - for the vehicle to allow for calibration when switching from stabilizer mode to crane mode. See more in the course module "Safety systems - stability".
*) The dead load heel for the directions X, Y1 and Y2 is called "Dead Load margin" in the CGW 5355 menu system. This parameter is used in connection with calibration. - With a 100% calibration of the EVS system before the crane work begins, the vehicle can
heel up to the set value for "Max margin" in the three directions X, Y1 and Y2. - With a reduced calibration of 80%, the vehicle can heel up to the set value for "Max margin"
minus the set value for the "Dead load margin" in the three directions X, Y1 and Y2. See the description of calibration in the course module "Safety systems - stability".

12
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Monitoring parameters in relation to EVS Parameters such as the load on the crane as well as the heel of the vehicle during crane operation can be monitored by means of the CGW 5355 service terminal. The menu item as well as the corresponding description of the parameter are indicated in the table below. When the CGW 5355 is used for monitoring of the load on the crane or the heel of the vehicle, you have to press SET. The dynamic values will then be indicated online. Example: When monitoring the load on the crane, select menu item 1.4.1.1.1, and a static value for the load on the crane is indicated in %. Press SET and a dynamic value is now indicated online, a value that varies according to the load on the crane. The table below provides a description of relevant parameters in relation to EVS. Among other topics, it discusses tare calibration. Tare-calibration When changing from stabilizer mode to crane mode, the EVS system is calibrated. This means that the signal from the heel sensors is zeroed, before it is possible to work with the crane. This is a tare-calibration. That is, the initial heel of the vehicle is set to 0 degrees. Menu item in CGW 5355
Parameter description
1.4.1 Loads
Monitoring of the load on the crane, the heel of the vehicle and other equipment.
1.4.1.1 Crane
Monitoring of the crane load
1.4.1.1.1 Current load
Monitoring of the current load on the crane in %.
1.4.1.4 EVS
Monitoring of the current heel of the vehicle in %.
1.4.1.4.1 X Incl1
The current heel in millidegrees (m°) of the vehicle in the X-direction registered by the EVS controller, single.
1.4.1.4.2 Y Incl1
The current heel in millidegrees (m°) of the vehicle in the Y-direction registered by the EVS controller, single.
1.4.1.4.3 X Incl2
The current heel in millidegrees (m°) of the vehicle in the X-direction registered by the EVS controller, redundant.
1.4.1.4.4 Y Incl2
The current heel in millidegrees (m°) of the vehicle in the Y-direction registered by the EVS controller, redundant.

13
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Menu item in CGW 5355
Parameter description
1.4.1.4.5 X1-offset
Deviation in millidegrees (m°) registered in the X-direction in the event of the tare-calibration of the EVS controller, single.
1.4.1.4.6 X2-offset
Deviation in millidegrees (m°) registered in the X-direction in the event of the tare-calibration of the EVS controller, redundant.
1.4.1.4.7 Y1-offset
Deviation in millidegrees (m°) registered in the Y-direction in the event of the tare-calibration of the EVS controller, single.
1.4.1.4.8 Y2-offset
Deviation in millidegrees (m°) registered in the Y-direction in the event of the tare-calibration of the EVS controller, redundant.
1.4.1.4.9 X-angle
The current heel in % of the max. permissible heel of the vehicle in the X-direction. The value is 0 when the load on the crane is below “Max Calibration” (the dead load).
1.4.1.4.10 Y-angle
The current heel in % of the max. permissible heel of the vehicle in the Y-direction. The value is 0 when the load on the crane is below “Max Calibration” (the dead load).
1.4.1.4.11 Load & calibration
The current load on the crane (%), when the EVS system was tare-calibrated when starting up, or later dynamic calibration during crane operation.
1.4.1.4.12 Calibration level
Calibration level (80-100%). During calibration the 80%, 85%, 90%, 95% or 100% diode indicate how well the calibration was carried out. Optimal calibration is 100%.
Replacing an EVS controller If an EVS controller requires replacement, certain parameters must be set. - When the new EVS controller is mounted on the crane it requires a basic calibration, where the
heel sensors are set to 0 when the vehicle is standing horizontally to all sides. Use a calibration function, where "Factory calibration in CGW menu 1.1.1.1.2.6.8.1 is marked using arrow up/down. Press ENT to complete calibration (takes place without any indication). The RCL is updated - "Update controller".
- In the CGW menu 1.1.1.1.1.18.3 next to "Tilt Sensor", select the EVS controller type. Press SET, and select the type using arrow up/down.
- In the CGW menu 1.1.1.1.1.18.4, select in which side the EVS controller is placed. With standard mounting of the crane, it is located on the left side of the crane in relation to the direction of travel. Press SET, and select "Left" using arrow up/down. If the crane has been turned 180 degrees in relation to the standard mounting, you have to select "Right".
When the new EVS controller is mounted, all EVS settings must be checked to ensure that the vehicle is stable in all load-bearing situations.

14
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Setting procedure By means of the CGW 5355 service terminal it is possible to choose between a guide procedure and a manual procedure for setting the EVS system. CGW 5355 guide procedure In the CGW 5355 menu system, use the setting procedure in item 1.6.3 (EVS-setup), “CGW 5355 guide”. By means of a step-by-step guide shown in the CGW 5355 display as well as the corresponding description, the crane fitter is guided through the setting procedure. During the setting procedure, the CGW 5355 automatically registers the different parameter values and programs them into the RCL controller when the setting procedure has been carried out. Then the EVS system has its basic settings. Note: When the setting procedure has been carried out and the EVS system has its basic settings, all settings must subsequently be checked and adjusted, if necessary. Please see the section “Check the settings”. Procedure for manual setting of the EVS system Manual setting of the EVS system is possible by means of the CGW 5355 service terminal. See the section ”Manual setting of EVS”. First carry out a basic setting, check it and adjust it, if necessary. Safety when setting up the EVS System When setting up the EVS system by means of the CGW 5355 guide procedure, the EVS system is deactivated and there is no safety system that prevents the vehicle from becoming unstable and, a the very worst, turning over. In case of manual setting, the EVS system is active. In both cases it is of paramount importance that the load remains as close to the ground as possible and that the crane is operated in a calm and considerate way, in particular when getting near the critical heel of the vehicle. When setting up the EVS system, the value of the load moment limitation of the RCL 5300 system is increased (happens automatically when carrying out the CGW 5355 guide procedure and is selected in case of manual setting) so that the crane can be loaded up to 125 %. For example: When the 80-100% diodes are lit during the set up procedure, the load moment is 125%. Note: Dependent on the crane model it might be necessary to increase the pressure setting of the load holding valves. Alternatively, a ball valve can be mounted behind the load-holding valve during the test.

15
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Preparing for the setting procedure Before starting the setting procedure, a weight block must be placed right next to the side of the vehicle. See item 9 in the section "Setting procedure, CGW 5355 guide". The weight block must have a weight that corresponds to 125% of the lifting capacity of the crane at maximum reach.
1. Place the vehicle on a stable, level and horizontal surface. Make sure that there is enough space for moving the crane 360 degrees at max. reach
2. There must not be any stabilizing load on the vehicle
3. The handbrake system of the vehicle must be activated
4. If the vehicle has an air spring system, it has to be deactivated. The air bellows must be
released so that the air spring system does not regulate during the setting procedure.
5. Start up the pump, start the safety and operating system, and select stabilizer mode.
6. The stabilizer beams must be retracted as far as possible (it must be possible to swing down swing-up stabilizer legs). Lower the stabilizer legs to supporting plates on the ground until the vehicle chassis is lifted approx. 5 cm. The vehicle must be set up as close to horizontal as possible.
7. Switch to crane mode and move the main boom to a position approx. 15 degrees above
horizontal and the jib in horizontal position. Next, extend the extensions approx. 1 metre. If the crane is fitted with auxiliary tools such as rotator, grab or both, they must be fitted in the hook suspension of the crane. If the crane is fitted with Fly-Jib, it must be retracted under the jib of the crane.
8. Connect the CGW 5355 service terminal to the RCL controller.
Save the crane profile in the CGW 5355 before starting up the setting procedure. Then it is possible to re-create the original crane profile, if any problems should occur during the procedure or in case of erroneous setting.
9. With the boom system in a position as indicated in item 7, read the dead load in % -
"Current load". Please see the description in the table below.
10. Enter the "Current load" value under the parameter "Max. calibration", and the RCL 5300 controller is updated. Please see the description in the table below.
11. Fold the crane in stowing position or, alternatively, move the boom system up
into vertical position. The load moment must be close to 0% as it must be possible to obtain a 100% calibration (the 100% diode is lit when calibrating) when starting the crane in preparation for the setting procedure.
Enter the "Max calibration" value in the "Basic setting" column in "Table, values for setting EVS parameters". See the end of this EVS set up guide.

16
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Explanatory table for items 9 and 10 above. Menu item Explanation Comments 1.4.1.1.1 Current load
Monitoring of the load on the crane in %
With the boom system in the basic position (main boom approx. 15 degrees above horizontal and the jib in horizontal position) and the extensions are extended by approx. 1 m and there is no load on the hook. Press SET and read the load on the crane.
1.1.1.1.1.18.2.1.1 Max calibration
Enter the value (%) from ("Current load") here: SET, type the number, ENT.
Indicates the max. permissible load on the crane to be able to carry through a calibration of the EVS system. See also the description in "Setting EVS parameters".
1.1.2 Update controller
The RCL 5300 is being updated.
Restart the RCL 5300.
Setting procedure, CGW 5355 Guide When setting the EVS system by means of the CGW 5355 guide procedure, the movement of the crane is at low speed (HDL speed) to avoid oscillations that may influence the settings. Interrupt the CGW 5355 guide procedure by means of the ESC press button, and the menu item 1.6.3 ("EVS setup") is being highlighted. By means of the arrow up key ( ↑ ), it is possible to go back to the previous item in the guide procedure and repeat the setting of a parameter, if necessary. Start the setting procedure by scrolling down the menu system to item 1.6.3: "EVS setup". Press ENTER. 1. The display shows:
Select the vehicle in question by means of one of the number keys (1, 2 or 3). 1. The crane is front-mounted on a long vehicle. 2. The crane is rear-mounted on a long vehicle. 3. The crane is front-mounted on a short vehicle. If the crane is equipped with personnel basket, always select 1. "Front, Long vehicle".
1. Front, Long Vehicle 2. Back, Long Vehicle 3. Short Vehicle

17
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
2. The display shows:
Select how the crane is fitted on the vehicle by means of one of the number keys (1 or 2).
You have to take into account the type of EVS controller used, e.g. AIC 5062/1, DPS or EVSC. Check that the AIC controller is facing correctly, i.e. the arrow must point in the direction of travel. If it is facing correctly, just select "1.Left". The DPS or EVSC controller is placed in the same side as the RCL 5300 controller, and the round part faces forward. This position is defined as left side in the direction of travel - standard mounting. Select "1.Left". If the crane has been turned 180 degrees on the vehicle in relation to the standard mounting, you have to select "2.Right". 3. After this choice, the display shows:
Reminder that the crane must be folded in stowing position or the boom system must be raised into vertical position so that the dead load moment does not influence the heel of the vehicle. Press ENTER.
4. The display shows:
The EVS system calibrates. In other words the heel in the X- and Y-directions is set to zero degrees. Check that a 100% calibration is obtained. The hydraulic pressure in the boom cylinder must not be too high (not exceeding "Max calibration”), otherwise the calibration is not carried out.
Please note: This calibration is of importance to all the following settings. Therefore, do not operate the stabilizers or other functions during the entire setting procedure, as this might change the zero setting of the heel.
Select Crane pos 1. Left 2. Right
Waiting for calibration
Fold crane Then press enter

18
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
5. After calibration, the display shows:
Unfold the crane from the stowing position. Raise the boom system into a position where it is possible to slew the crane 360 degrees (and over the driver’s cab), without having to change the boom position. Raise the main boom into as small an angle as possible, the jib
must be in horizontal position and the extensions must still be retracted. With the boom in this position, slew to the left until the boom is over the driver’s cab (Y1-direction). Example. Then press ENTER. 6. The display shows:
Slowly extend the extensions until the movement is stopped and the buzzer gives a constant signal. Now the dead load moment corresponds to the ”Max calibration” value previously set in menu item 1.1.1.1.1.18.2.1.1.
7. The display automatically changes into:
Slew slowly and continuously 360° to the right until the boom is over the driver’s cab again. Note that it is only possible to carry out the slewing movement, and the slewing speed is reduced to HDL speed.
Example. During the slewing movement, the EVS system has registered the dead load heel (“Dead Load Margin") in the X-, Y1-, and Y2-directions. Press ENTER.
Prepare Crane for 360° slew
Then press Enter
Extend to max calibration load level
Slowly slew 360° Then press Enter X= - m°, Y1= - m°, Y2= - m°

19
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
8. The display shows:
With a load on the crane, find the slewing angle in the X-direction (to one of the sides), where the vehicle has its max. heel. Most often it will be in a slewing angle diagonally backwards.
Find the slewing angle as follows: Slew the boom to the left and put a weight block in the hook. The weight block must be positioned right next to the vehicle and have a weight corresponding to 125% of the lifting capacity of the crane at max. reach. Example Carefully lift the weight block a bit from the surface, and slew it so far to the left that it is positioned to the back over the vehicle (Y2-direction) and still close to the surface. Example Carefully slew the weight block approx. 90 degrees to the right until the boom is right over the stabilizers. During the slewing movement, the weight block passes the slewing angle where the vehicle has the max. heel.
Example
Find max inclination in X-dir with load. Then press Enter

20
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
When slewing forth and back a bit between the stabilizer and the rear, the buzzer beeps every time the angle of heel is increased. Furthermore the length of the black bar in the CGW 5355 display indicates the size of the present angle of heel in relation to the largest registered angle of heel.
Example It is thus possible to find the slewing angle where the angle of heel is at its maximum by noticing when the black bar is longest. When the slewing angle (at the largest angle of heel) has been found: Press ENTER. 9. The display shows:
Extend the weight block by means of the ”extension out” function (the weight block must constantly be close to the surface), until the wheel on the opposite side of the vehicle starts losing contact with the surface.
Now the EVS system has registered the max. heel (“Max Margin”, in menu item 1.1.1.1.1.18.2.2.2) in the X-direction, as well as the load on the crane in % at this max. heel. Depending on which type of vehicle that has been selected, the following happens when pressing ENTER: • If a rear-mounted crane is about to be set, and you started by choosing 2. Back, Long
Vehicle (the crane is rear-mounted on a long vehicle) in option 2, the setting procedure has been carried out, and the indication in the CGW 5355 display automatically goes back to item 1.6.3 in the menu system.
• If a front-mounted crane is about to be set, and you started by selecting 1. Front, Long
vehicle (the crane is front-mounted on a long vehicle) or 3. Short Vehicle (the crane is front-mounted on a short vehicle) in option 2, the CGW 5355 automatically goes on to the next item.
Press ENTER
Find max inclination in X-dir with load. Then press Enter
Extend slowly until unstable
X= - m°, Y1= - m°, Y2= - m°

21
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
10. The display shows:
Retract the weight block to the shortest possible reach by means of the “extension in”-function. Carefully slew to the right until the weight block is hanging in the middle in front of the driver’s cab (Y1-direction).
Lower the jib, and extend the extensions a bit so that the weight block is hanging a bit over the surface. If the vehicle is very unstable in the Y1 direction, take off the weight block before carrying out the next item. Example. Press ENTER. 11. The display shows:
Extend the weight block by means of the ”extension out” function (the weight block must constantly be close to the surface), until the rear wheel of the vehicle starts losing contact with the surface.
Now the EVS system has registered the max. heel (“Max Margin”, in menu item 1.1.1.1.1.18.2.3.2) in the Y1-direction, as well as the load on the crane in % at this max. heel. The load on the crane at which the max. heel is obtained in the Y1-direction, is included as “Max stable load"* in menu 1.1.1.1.1.18.2.1.2. However, it is the value for the load on the crane at max. heel in the X-direction (found in item 9) that is used if this load was lower. *) See the section: Note concerning the "Max stable load" parameter Press ENTER.
Withdraw and Slew to Y1-dir
Then press Enter
Extend slowly until unstable
X= - m°, Y1= - m°, Y2= - m°

22
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
12. The display shows:
It is indicated that the EVS setting procedure has been carried out.
Press ENTER.
It is indicated that the values found are automatically being saved in the RCL controller.
After pressing ENTER, the entered parameters become valid and the previous parameters will be overwritten. The CGW 5355 guide procedure has been carried out and the CGW 5355 automatically goes back to item 1.6.3 in the menu system. The entered values obtained during the setting procedure must be noted in: “Table, values for setting EVS parameters” in the column “Basic setting”. Please see chapter “Control and optimisation of the EVS settings”. Assess the values for "Dead load margin" for the directions X, Y1 and Y2 (are they realistic in relation to the vehicle/crane installation), and enter them in the table. Note concerning the "Max stable load" parameter In relation to the EVS system, ”Max stable load” indicates the load moment (%) that the lifting capacity of the crane is reduced to, if the EVS system has not been calibrated after operating the stabilizer functions. Up to and including RCL 5300 software version 31_22 (implemented May 2012), the "Max stable load" parameter (menu item 1.1.1.1.1.18.2.1.2) was automatically set during the "Setting procedure, CGW 5355 guide", and afterwards it was to be checked and corrected if necessary. Please see chapter “Control and optimisation of the EVS setting”. As from the RCL 5300 software version 32_23 the "Max stable load" parameter will not be set during the "Setting procedure, CGW 5355 guide". The parameter has to be set manually - please see the section "Stability test, setting of "Max stable load"".
EVS Calibrated Press Enter
Storing in module

23
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Tips for setting up EVS 1. As described in the chapter “Preparing for the setting procedure” the air spring system of the
vehicle must be deactivated and the air bellows released before starting the setting procedure. Even though the air-spring system is deactivated before starting, we have seen examples of air-sprung axles being active up to a certain level during crane operation. If this is the case, it is necessary to contact the truck supplier, who can carry out the necessary adjustments of the electronic control of the air-sprung axles.
2. As HMF does not always know, in which direction the crane is turning when it is being fitted on the vehicle, always check that the arrow on the cover of the AIC box points forward towards the driver’s cab. When a DPS or EVSC controller is fitted, you have to select the orientation in relation to the direction of travel - CGW menu item 1.1.1.1.1.18.4. See item 2 in "Setting procedure, CGW 5355 guide".
3. During item 6 of the setting procedure, where the display normally shows ”Extend to max
calibration level” (extend the extensions slowly until the movement is stopped), you may experience that the text does not appear, or that this item is completely skipped (the display jumps from item 6 to item 8).
In item 6 it may also occur that the jib extensions continue the “extension – out” movement further than approx. one metre as described in the setting procedure. In this situation check whether the dead load moment (”Max Calibration” in menu item 1.1.1.1.1.18.2.1.1) is correct. Please see items 9 and 10 in the chapter “Preparing for the setting procedure”.
4. To be able to carry out the CGW 5355 guide procedure, the entered values for "Max margin"
in the X- and Y-direction must not be “0”. If this occurs, enter the values pre-set from factory. See the values in "Table, values for setting EVS parameters".

24
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Criteria for stability During the stability test of a craned vehicle it must be proven that the vehicle does not become unstable or turns over when carrying out the lifting tasks that the crane is intended for both as regards function and operation. The criterion for sufficient stability is that during the stability test with a 125% load, at least one braked set of wheels (axle) must have contact with the surface, but one or several stabilizer legs are allowed to lift from the surface. In the following we have for a number of different vehicles and installations given examples of which set of wheels/axle that has to be braked and have contact with the surface during the test procedure. Wheels drawn in red must keep in contact with the surface. Black wheels are allowed to lift from the surface. The rear wheels drawn in red are braked wheels.

25
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department

26
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Stability test, setting of "Max stable load" The "Max. stable load" parameter is set by following the below procedure. Please also see the section ”Procedure for manual setting of EVS”. 1. Retract both stabilizer beams and lower both
stabilizer legs to the ground.
2. Move the boom system to the side where the base/column is offset in relation to the centre of the vehicle.
3. Both in case of front-mounting and rear-mounting, place
the boom system perpendicular to the tilting line as indicated in the two upper drawings to the right.
4. Lift a load into the basic position of the crane, and
extend the jib extensions until the vehicle has reached its max. permissible heel limit (see the section "Criteria for stability"). The weight of the load must be of a size where the required heel is obtained at the max. reach of the crane.
5. Read the current load moment on the crane in the CGW
5355 menu 1.4.1.1.1 ("Monitor - Current load").
6. In case of front-mounting, also check stability in front of the vehicle. Place the boom system perpendicular to the tilting line as indicated in the lower drawing to the right or straight forward - depending on where the vehicle is less stable. In case of rear-mounting on a short vehicle, also check stability with the boom system to the rear from the vehicle.
7. Also in this case (as described in item 6), read the
current load moment on the crane in the CGW 5355 menu 1.4.1.1.1 ("Monitor - Current load").
8. Enter the lowest of the two values found in item 5 and
7 in menu item 1.1.1.1.1.18.2.1.2 ("EVS - Advanced - General - Max stable load"): Press SET and enter the numerical value which has appeared from the stability test.
9. Update and restart the RCL 5300 controller. Note: The above-mentioned value in menu item 1.1.1.1.1.18.2.1.2 ("EVS - Max stable load") is the same as in menu 1.1.1.1.1.24.9 ("Stab safety system - Max stable load"). There are two entries for setting of the same parameter. Enter the value found in the "Table, values for setting EVS parameters" in the column "Basic setting".
Stb down
Stb down
Stb down
Stb down
Stb down
Stb down

27
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Control and optimisation of the EVS settings When "Setting procedure, CGW 5355 guide" has been carried out and the EVS system has its basic settings, all settings must subsequently be checked and adjusted, if necessary. Select 125% stability test in the CGW 5355 menu in item 1.6.1.2. With these settings the crane is capable of being loaded up to 125%. I.e. when the diodes on the RCL 5300 indicator panel indicate 100%, the load moment of the crane is 125%. Check the entered values by a 100% calibration in two situations (see “check 1” and “check 2” in this section), when working at normal crane speed and when carrying out a slewing movement in the entire slewing area of the crane with the weight block in the hook. The vehicle must be stable when a crane movement is stopped by the EVS system and the crane should not be stopped at a too small heel of the vehicle. Readjust the values, if necessary, stepwise by 0.1 degree until the correct stability is obtained. See the "Criteria for stability" section. When the CGW 5355 is used for monitoring of the load on the crane or the heel of the vehicle, you have to press SET. The dynamic values will then be indicated online. Concerning monitoring of load on the crane and heel as well as entering of parameters, please also see the section “Manual setting of EVS”. Write the new values that you may find during the two control situations in the “Table, values for setting EVS parameters” at the end of the section. Fill in the light fields. Check 1 The set-up of the vehicle as in "Setting procedure, CGW 5355 guide" is retained. Check the entered values compared with the vehicle stability, when working at normal crane speed (during the guide procedure, the crane operates at HDL speed) and when carrying out a slewing movement in the entire slewing area of the crane with the weight block in the hook. Note: Always check the value for "Y2 Max margin", as it is not being set during the CGW 5355 guide procedure. Enter any corrective values in the table in column "Check 1". Check 2 Fully extend the stabilizer beams and lower the stabilizer legs to the supporting plates on the ground until the chassis of the vehicle is lifted approx. 5 cm. Check the entered values compared with the vehicle stability, when working at normal crane speed and when carrying out a slewing movement in the entire slewing area of the crane with the weight block in the hook. The values checked in "Check 2" must not be increased in relation to the values found in "Check 1". Enter the correctional values (lower values) made, if any, in the table in column "Check 2". In the "MEWP" column, only enter values if the crane is fitted with a personnel basket.

28
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Parameters that can be optimized If for different reasons - for example the spring suspension of the vehicle, the flexibility of the chassis/subframe etc. - it is difficult to obtain satisfactory stability, it may be advantageous - in addition to re-adjusting the angles of heel - also to focus on the dynamic impacts on the vehicle. Instead of - or in addition to - reducing the angles of heel ("Max margin"), you can adjust the parameters that influence the speed of the crane functions, as well as the activation and deactivation times when switching speeds. Maximum speeds and EVS speeds In relation to the EVS stability safety system, the speed of the crane functions can be set in different ways, each one impacting the EVS functionality for the individual installation of the vehicle/crane. See the table below with an explanation for CGW 5355 parameters. Maximum speed, crane functions The maximum speed of the crane functions - " Crane speed" - is factory set, but can be reduced individually to ensure optimal transition to reduced speed - "EVS speed". For instance, the speed of the slewing function. EVS speed, crane functions The working speed of the crane is adjusted in relation to the heel of the vehicle. This means maximum speed of the crane functions - "Crane speed" - with a small heel of the vehicle, and reduced speed - "EVS speed" - with a greater heel. "EVS speed" is factory-set to activate at 50% of the maximum permissible heel ("Max Margin") via the parameter "Reduction factor", and the speed is adjusted via a time-controlled ramp function down to the pre-set speed. This is illustrated with the curve below. From reduced to maximum speed another time-controlled ramp function is followed. The ramp functions are described in the next section - "Time-controlled transition to EVS speed".
Has
tighe
d [%
]
100
100EVS-krængning [%]

29
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Time-controlled transition to EVS speed The working speed of the crane is being adjusted according to a time ramp in relation to the vehicle's EVS heel. That is, the time lapse between maximum speed "Crane speed" and reduced speed, "EVS speed". This time interval is called "OnRamp" and starts with the heel as set in "Reduction factor". The time interval from "EVS speed" to "Crane speed" is called "OffRamp". This functionality can also be activated using the red press button on the RCL or the remote control box. This is illustrated with the curves below. The red curve shows the time ramp for activation of "EVS speed". The factory setting is 0.8 seconds. The blue curve shows the time ramp for deactivation of "EVS speed". The factory setting is 5.0 seconds. Adjustment of EVS parameters In the table below is indicated the menu item in the CGW 5355 and a description of the functions and parameters that you can adjust when optimising the EVS settings. Menu item in CGW 5355
Parameter adjustment
1.1.1.1.1.18.2.1.3 Reduc. factor
”Reduc. Factor” is pre-set from factory to 50%. This means that when the heel of the vehicle is 50% of the max. permissible limit ("Max margin"), the speed reduction "EVS speed" is activated. To activate "EVS speed" and reduce the slewing speed a little sooner before the pre-set EVS-stop ("Max Margin"), it is possible to reduce the value - for example to 40% or less.
Has
tighe
d [%
]
100
100EVS-krængning [%]
OffRamp [s]
OnRamp [s]

30
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Menu item in CGW 5355
Parameter adjustment
1.1.1.1.2.10.1.1.1 Slew-Crane speed CCW 1.1.1.1.2.10.1.1.2 Slew-Crane speed CW
The maximum speed of the slewing function (Crane speed) may be too high and it may be advantageous to reduce it, which will reduce the dynamic impacts on the vehicle when slowing down from maximum speed to EVS speed and then EVS-stop. Recommended slewing speed: - for cranes through to K4: minimum 25-30 sec./1 rot. - for cranes from K5 and above: minimum 28-35 sec./1 rot. The same slewing speed is set for both directions.
1.1.1.1.2.10.1.1-13 Crane speeds
Maximum speed, crane functions can be set for all crane functions.
1.1.1.1.2.10.1.1.9 Slew-EVS speed CCW 1.1.1.1.2.10.1.1.10 Slew-EVS speed CW
The slewing speed of the crane in "EVS speed" mode can be adapted to reduce the dynamic impacts on the vehicle immediately before an EVS-stop. Recommended slewing speed: a value between 25% and 45%. The same slewing speed is set for both directions.
1.1.1.1.2.10.1.1-13 Crane speeds
EVS speed, crane functions can be set for all crane functions.
1.1.1.1.2.10.3 Time HDL (EVS) 1.1.1.1.2.10.3.1 On Ramp 1.1.1.1.2.10.3.2 Off Ramp
The working speed of the crane is being adjusted according to a time ramp in relation to the EVS heel of the vehicle. See the section Time-controlled transition to EVS speed above. The dynamic impacts on the vehicle can be reduced by adjusting the values for "OnRamp" and "OffRamp" in menu item "Time-HDL". "On Ramp" is the activation time from the set "Crane speed" to the set "EVS speed". We recommend a value between 0.8 and 1.5 seconds. "Off Ramp" is the deactivation time from the set "EVS speed" to the set "Crane speed". We recommend a value between 4 and 10 seconds. If the crane has a long reach (many jib extensions), select a long time period. If the crane has a short reach (few jib extensions), select a short time period.

31
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Comments to the EVS settings Carefully carry out the stability test and the subsequent optimisation of the EVS settings. The vehicle must under no circumstances be unstable in any of the directions before delivering it to the customer. Update the RCL 5300 controller by means of the CGW 5355, menu item 1.1.2 ("Update controller"). Save the crane profile on the SD card, menu item 1.1.3 ("Controller to file"). Setting of EVS combined with mounting of hoist If the crane is fitted with a hoist, working with a load hanging in a long wire (or similar lifting situations), you have to take this into account when setting up the EVS system. The settings have to be far more restrictive to ensure stability because a load might oscillate - especially in case of EVS-stop. The risk of a load oscillating in different situations is higher, especially if the wire rope has been led via a Fly-Jib or manual extensions. EVS and personnel basket If the crane is used as personnel lifter, i.e. a personnel basket is mounted at the end of the jib extensions, a redundant EVS controller is included in the EVS system. The RCL 5300 monitors and compares the signals from the two heel sensors in the redundant EVS controller. The safety system reacts from the highest signal values (the largest angle of heel), received from one of the two heel sensors (redundant safety system). In the pin connection between the personnel basket and the crane, a sensor is mounted which emits a signal to the RCL 5300 controller on whether or not the personnel basket is mounted. Setting of EVS for ordinary crane operation Without the personnel basket mounted on the crane, adjust the EVS system as usual according to the above setting procedure. Setting of EVS for crane operation with personnel basket With the personnel basket mounted on the crane, the permissible heel of the vehicle is reduced in all directions (X, Y1 and Y2) to the value indicated in “Crew Factor". Please see the table below. Check and, if necessary, adjust the ”Crew Factor” value, which is pre-set from factory to 40%. Furthermore the lifting capacity of the crane and the Fly-Jib is reduced to 80% of the nominal capacity. The value has been hard-coded in the RCL 5300 software and cannot be changed by means of the CGW 5355. Carry out a stability test and an optimisation of the settings as described above in the item "Control and optimisation of the EVS settings". Retract the stabilizer beams and lower the stabilizer legs to the supporting plates on the ground until the chassis of the vehicle is lifted approx. 5 cm. With the personnel basket mounted on the crane, carry out a 100% calibration of the EVS system, and then check the stability of the vehicle.

32
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
The criterion for sufficient stability is that the EVS system must stop all crane movements at the moment where one or more stabilizer leg/s start/s lifting from the ground. In other words, in case of EVS stop, the stabilizer legs must always touch the ground. Write the modified and optimized value of ”Crew. factor” in the “Table, values for setting EVS parameters in the “MEWP” column. Menu item in CGW 5355
Parameter description
1.1.1.1.1.18.2.1.4 Crew. factor
Indicates the heel (%) of the maximum permissible heel limit ("Max margin" in the X, Y1 and Y2-directions), when the personnel basket is mounted on the crane.
1.1.1.1.2.10.2 Function speed-Crew Lift Speed
Under "Crew Lift Speed" the working speed of the crane is set (%) for each single crane function ("slew", "boom", "jib" and "extension") and for each single Fly-Jib function ("Fly-jib" and "Fly-jib - extension"). The settings are active when the personnel basket is mounted on the crane. Please note: The same values can be found and set in "Features" - "Crew lifting", menu item 1.1.1.1.1.16.
Update and restart the RCL 5300 controller and save the crane profile in the CGW 5355. Procedure for manual setting of the EVS system As an alternative to using the CGW 5355 guide procedure, the EVS can be manually adjusted by means of the CGW 5355 service terminal. You must read through all previous chapters in this guide, before manual setting of the EVS system. When the CGW 5355 is used for monitoring of the load on the crane or the heel of the vehicle, you have to press SET. The dynamic values will then be indicated online. Example: When monitoring the load on the crane, select menu item 1.4.1.1.1, and a static value for the load on the crane is indicated in %. Press SET and a dynamic value is now indicated online, a value that varies according to the load on the crane. The meaning of the different EVS parameters are described in the section "Setting EVS parameters". It may be necessary to increase the value "Max margin" for the directions X, Y1 and Y2, to be able to set EVS. Prepare the vehicle and the crane for setting of EVS according to the chapter ”Preparing for the setting procedure”. Select 125% stability test in the CGW 5355 menu in item 1.6.1.2. With these settings the crane is capable of lifting 125%. That is, when the diodes on the RCL 5300 indicator panel indicate 100%, the load moment of the crane is 125%.

33
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
The procedure is indicated for a front-mounted crane on a short chassis. In case of a rear-mounted crane, the “Max margin” in Y1 and Y2 can be set at a high level. Write the entered values obtained during the manual setting of the EVS in the column – “Basic setting” – in the “Table, values for setting EVS parameters”. Please see annex at the end of this guide. Step-by-step manual setting of EVS Step Menu item Explanation Comments 1 1.4.1.1.1 (SET)
Current load Monitoring of the load on the crane in %
With the boom system in basic position and the 1st extension extended by 1 m and no load in the hook. Press SET and read the load on the crane.
2 1.1.1.1.1.18.2.1.1 Max calibration
Enter the value (%) from step 1 ("Current load") here. SET, enter number, ENT
Indicates the max. permissible load on the crane (%) to be able to carry through a calibration of the EVS system.
3 1.4.1.4.1 (SET) X-angle
Monitoring of the dead load heel in the X-direction.
With the boom system in basic position and the 1st extension extended by 1 m (no load in the hook), carry out a slow slewing movement around the vehicle. Notice and read the largest value (m°) for the dead load heel in the X-, Y1- and Y2-direction during the slewing movement. In the Y1-direction the value is positive and in the Y2-direction the value is negative.
4 1.4.1.4.2 (SET) Y-angle
Monitoring of the dead load heel in the Y1- and Y2-directions.
5 1.1.1.1.1.18.2.3.3 Dead Load margin (X)
Insert the value found in step 3 (X) here.
Dead load heel in the X-direction (degrees). Indicates the heel of the vehicle at the dead load, when the boom system is in basic position and the extensions are extended by approx. 1 m.
6 1.1.1.1.1.18.2.3.3 Y1 Dead Load margin
Insert the value found in step 4 (Y1) here.
Dead load heel in the Y1-direction (degrees). Indicates the heel of the vehicle at the dead load, when the boom system is in basic position and the extensions are extended by approx. 1 m.
7 1.1.1.1.1.18.2.3.6 Y2 Dead Load margin
Insert the value found in step 4 (Y2) here.
Dead load heel in the Y2-direction (degrees). Indicates the heel of the vehicle at the dead load, when the boom system is in basic position and the extensions are extended by approx. 1 m.

34
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Step Menu item Explanation Comments 8 1.4.1.4.1 (SET)
X-angle --------------------- 1.4.1.1.1 (SET) Current load
Monitoring of the heel - with load - in the X-direction. ---------------------------- Monitoring of the load on the crane in %
Extend the weight block (max. 0.5 m above the surface), where the heel is greatest in the X-direction. Operate the ”extension - out” movement until a wheel on the opposite side of the vehicle starts losing contact with the surface. Read the value (degrees) for this maximum permissible heel of the vehicle. ----------------------------------------------------- Also read the load moment (%) at max. heel.
9 1.4.1.4.2 (SET) Y-angle --------------------- 1.4.1.1.1 (SET) Current load
Monitoring of the heel - with load - in the Y1 and Y2-directions. ---------------------------- Monitoring of the load on the crane in %
Extend the weight block with the ”extension – out”-function in the Y1-direction until the wheels in the opposite end start losing contact with the surface. Follow the same procedure in the Y2-direction (only in case of a rear-mounted crane on a short vehicle). Read the values of the max. permissible heel of the vehicle in the Y1- and Y2 directions. -------------------------------------------------------- Also read the load moment (%) at max. heel in the Y1-direction.
10 1.1.1.1.1.18.2.2.2 Max margin (X)
Insert the value from step 8 (X) here.
The max. permissible heel in the X- direction (degrees).
11 1.1.1.1.1.18.2.3.2 Max margin (Y1)
Insert the value from step 9 (Y1) here.
The max. permissible heel in the Y1- direction (degrees).
12 1.1.1.1.1.18.2.3.5 Max margin (Y2)
Insert the value from step 9 (Y2) here.
The max. permissible heel in the Y2- direction (degrees).
13 1.1.1.1.1.18.2.1.2 Max stable load
Enter the lowest of the values (Load on crane) in step 8 and 9 here.
”Max stable load” indicates the load moment (%), which the lifting capacity of the crane is reduced to, if the EVS system has not been calibrated after operating the stabilizer functions.
Update the RCL 5300 controller by means of the CGW 5355, menu item 1.1.2 ("Update controller"). After this manual basic setting of the EVS, check all the entered values compared with the vehicle stability, when working at normal crane speed and when carrying out a slewing movement in the entire slewing area of the crane with the weight block in the hook.

35
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Then follow the procedure ”Control and optimisation of the EVS setting” (see the chapter previously in this guide), and complete the columns “Check 1” and “Check 2” in the “Table, values for setting EVS parameters”. Personnel basket The above manual setting of the EVS system is performed without the personnel basket mounted on the crane. When setting the EVS system with the personnel basket mounted, follow the instruction in the chapter “EVS and personnel basket”.

36
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
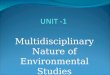
Setting EVS-H On manually operated cranes - unlike radio-remote controlled cranes - there are no control signals between the RCL 5300 and the radio controller for regulating the speed of the crane functions. In other words, the EVS speeds are not active in an EVS-H system. Instead there are two built-in one-way restrictor valves in the hydraulic slewing system. The valves are marked with red arrows on the hydraulic diagram for the slewing circuit. The valves are connected to output terminals in the CIO 5376 controller or another controller. Example of setting up the output terminals in the CIO 5376: Menu item in CGW 5355
Parameter description
1.1.1.12.4.5 Output config CIO5376-1
Press ENT Dig.out 1, terminal K393 - ENT Signal - SET - arrow up, select EVS1 (valve for A-port). Dig.out 2, terminal K391 - ENT Signal - SET - arrow up, select EVS2 (valve for B-port).
Both outputs Dig.out 1 and 2 are high during normal operation and go low when the vehicle heels, corresponding to the pre-set value of "Reduc. factor" - i.e. the slewing speed is reduced. The one-way restrictor valves are pre-set from the factory so that the crane slews 180 degrees in 25 seconds. The valves can be adjusted on the setting screw (see the arrow in the picture), but as a rule, it is not necessary. Set the EVS-H according to the sections "Setting procedure, CGW 5355 guide" and "Control and optimisation of the EVS settings".
A B
P T

37
Setting procedure, EVS
Rev.: 11-16 HMF Technical Service Department
Table, values for setting EVS parameters Parameter
Menu item Factory
setting Basic setting
Check 1 Check 2 MEWP
General
Max calibration 1.1.1.1.1.18.2.1.1 20-30%
Max stable load 1.1.1.1.1.18.2.1.2 35%
Reduc. factor 1.1.1.1.1.18.2.1.3 50% 50%
Crew. Factor 1.1.1.1.1.18.2.1.4 40% 40% 40% 40%
X-axis
Max margin 1.1.1.1.1.18.2.2.2 0.8°
Dead load margin 1.1.1.1.1.18.2.2.3 0.3°
Y-axis
Y1 Max margin 1.1.1.1.1.18.2.3.2 0.8°
Y1 Dead Load margin 1.1.1.1.1.18.2.3.3 0.4°
Y2 Max margin 1.1.1.1.1.18.2.3.5 1.7° 1.7°
Y2 Dead Load margin 1.1.1.1.1.18.2.3.6 0.2°