Embed Size (px)
Citation preview

Shortest Paths
Single-Source Shortest Paths
Dijkstra’s Algorithm
Bellman-Ford Algorithm
Difference Constraints
All-Pairs Shortest Paths
Floyd-Warshall Algorithm
Johnson’s Algorithm
Shortest-Paths. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Example Weighted Graphs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Example Bad Graph . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Key Properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Key Properties Continued . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6Basic Procedures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Basic Procedures Continued . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Dijkstra’s Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Dijkstra Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10Bellman-Ford Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Bellman-Ford Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Difference Constraints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13Difference Constraints Continued . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14Difference Constraints Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15All-Pairs Shortest Paths . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16All-Pairs Recursion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17All-Pairs Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18All-Pairs Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19Floyd-Warshall Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Floyd-Warshall Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Floyd-Warshall Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22Johnson’s Algorithm for Sparse Graphs . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1
Johnson’s Algorithm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24Johnson’s Algorithm Analysis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Johnson Example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2

Shortest-Paths
Shortest path problems on weighted graphs (directed or undirected) have twomain types:
Single-Source Shortest-Path: find the shortest paths from source vertex s to allother vertices.
All-Pairs Shortest-Path: find the shortest paths between all pairs of vertices.
Some notation:w(u, v) = weight of edge (u, v)w(p) = sum of weights on path p
Let δ(u, v) = shortest distance from u to v.
Let sopt❀ v stand for shortest path from s to v.
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 2
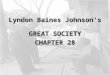
Example Weighted Graphs
1
23
7
85
54 7
9
6
4
8
a
b c d
ei
h g f
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 3
3
Example Bad Graph
Graphs with negative-weight cycles can’t be solved.
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 4
Key Properties
Triangle Inequality: If (u, v) is an edge, then δ(s, v) ≤ δ(s, u) + w(u, v). If p isa path from u to v, then δ(s, v) ≤ δ(s, u) + w(p).
Proof: δ(s, v) > δ(s, u) + w(u, v) contradicts δ’s definition. So doesδ(s, v) > δ(s, u) + w(p).
Optimal Subpath Property: If u is on sopt❀ v, then δ(s, v) = δ(s, u) + δ(u, v).
Proof: Let p be sopt❀ v, and let p1 and p2 be the subpaths s ❀ u and u ❀ v.
By definition, w(p) = w(p1) + w(p2) ≥ δ(s, u) + δ(u, v). A lower δ(s, u) orδ(s, v) would contradict p’s optimality.
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 5
4

Key Properties Continued
Convergence Property: If s ❀ u→ v is a shortest path, thenδ(s, v) = δ(s, u) + w(u, v).
Proof: Follows from the optimal subpath property.
Let v.d ≥ δ(s, v) for all v with s.d = 0 = δ(s, s).
Path-Relaxation Property: If v.d > δ(s, v), then some edge (x, y) satisfiesv.d = δ(s, x) and y.d > x.d+ w(x, y).
Proof: Some edge (x, y) on sopt❀ v must be the first edge with x.d = δ(s, x)
and y.d > x.d+ w(x, y) = δ(s, y).
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 6
Basic Procedures
These properties justify the following procedures for single-sourceshortest-paths.v.d = distance from s to v.v.π = previous vertex on s ❀ v path.
Initialize-Single-Source(G, s)for each vertex v in G
v.d ← ∞v.π ← nil
s.d ← 0
Initial ∞ ensures that d.v ≥ δ(s, v) for all v.s.d = 0 ensures that s.d = δ(s, s).
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 7
5
Basic Procedures Continued
Relax(u, v, w)if v.d > u.d+ w(u, v)v.d ← u.d+ w(u, v)v.π ← u
If u.d ≥ δ(s, u) and v.d ≥ δ(s, v) before Relax(u, v, w) then they remain trueafterwards.
Also, if v.d > δ(s, v), then the Path Relaxation Property implies that some callto Relax will improve d somewhere.
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 8
Dijkstra’s Algorithm
Dijkstra’s Algorithm assumes all weights are nonnegative.
Dijkstra(G,w, s)Initialize-Single-Source(G, s)S ← ∅Q ← G.V using d field for priority queuewhile Q 6= ∅
u ← Extract-Min(Q)S ← S ∪ {u}for each v ∈ G.Adj[u]
Relax(u, v, w)
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 9
6

Dijkstra Analysis
Proof of Correctness:
Basis: s is assigned to u, s.d = 0 = δ(s, s)Assume: For all x ∈ S, x.d = δ(s, x)Show: u.d = δ(s, u) when u is extracted.Induction: Proof by contradiction.
Suppose δ(s, u) < u.d.
Some edge (x, y) in sopt❀ u goes from S to Q.
y.d = δ(s, y) because (x, y) has been relaxed,but u.d ≤ y.d = δ(s, y) ≤ δ(s, u) < u.d
is a contradiction.
Dijkstra is O(E lg V ) with binary heaps.
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 10
Bellman-Ford Algorithm
This works with negative weights. false is returned if a negative cycle isdetected.
Bellman-Ford(G,w, s)Initialize-Single-Source(G, s)for i ← 1 to |V | − 1
for each edge (u, v) in G
Relax(u, v, w)for each edge (u, v) in G
if v.d > u.d+ w(u, v)return false
return true
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 11
7
Bellman-Ford Algorithm
Proof of Correctness:
All finite shortest paths have ≤ V − 1 edges.
The ith iteration relaxes ith edge in the optimal path.
If shortest path is finite, then after V − 1 iterations, v.d = δ(s, v).
If there is an infinite shortest path,then v.d > u.d+ w(u, v) for some edge (u, v).
Bellman-Ford is O(V E).
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 12
Difference Constraints
A difference constraint is xj − xi ≤ bk, where xi and xj are variables and bk is aconstant.
Difference constraints can represent time relationships between events.
If x2 must occur within 2 hours after x1, then x2 − x1 ≤ 2.
If x2 must occur at least 2 hours after x1, then x2 − x1 ≥ 2, which isequivalent to x1 − x2 ≤ −2.
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 13
8

Difference Constraints Continued
The triangle inequality for shortest paths is a difference constraint.δ(s, v) ≤ δ(s, u) + w(u, v) is equivalent to δ(s, v)− δ(s, u) ≤ w(u, v).
A set of difference constraints xj − xi ≤ bk can be reduced to a weighted graphby w(vi, vj) = bk and w(s, vj) = w(s, vi) = 0.
There is a solution for single-source shortest paths if and only if there is asolution to the difference constraints.
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 14
Difference Constraints Example
x1 − x2 ≤ 0x1 − x5 ≤ −1x2 − x5 ≤ 1x3 − x1 ≤ 5x4 − x1 ≤ 4x4 − x3 ≤ −1x5 − x3 ≤ −3x5 − x4 ≤ −3
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 15
9
All-Pairs Shortest Paths
The all-pairs shortest-paths problem is finding the shortest path for each pair ofvertices. Algorithms for this problem can be adapted for transitive closure.
Let δ(i, j,m) be the shortest length from i to j using ≤ m edges.
δ(i, j, 1) =
0 if i = j
w(i, j) if (i, j) is an edge∞ otherwise
δ(i, j, 2m) =n
mink=1
(δ(i, k,m) + δ(k, j,m))
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 16
All-Pairs Recursion
This recursive definition is correct.
Basis: Equation for δ(i, j, 1) is correct.Assume: δ(i, j,m) is correct.Show: Equation for δ(i, j, 2m) is correct.Induction: Optimal path of ≤ 2m edges consists
of two optimal paths of ≤ m edges.
This leads to a O(V 3 lg V ) algorithm.
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 17
10

All-Pairs Algorithm
All-Pairs(G,w)n ← |G.V |D ← an n× n matrix initialized to δ(i, j, 1)m ← 1while m < n− 1
Extend(D, n)m ← 2m
return D
Extend(D, n)for i ← 1 to n
for j ← 1 to n
for k ← 1 to n
D[i, j] ← min(D[i, j], D[i, k] +D[k, j])
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 18
All-Pairs Example
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 19
11
Floyd-Warshall Algorithm
Floyd-Warshall(G,w)n ← |G.V |D ← an n× n matrix initialized to δ(i, j, 1)for k ← 1 to n
for i ← 1 to n
for j ← 1 to n
D[i, j] ← min(D[i, j], D[i, k] +D[k, j])return D
Floyd-Warshall is O(V 3).
For transitive closure, use a 0/1 matrix and:D[i, j] ← D[i, j] ∨ (D[i, k] ∧D[k, j])
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 20
Floyd-Warshall Analysis
Let λ(i, j, k) be the shortest distance from i to j with all intermediate vertices≤ k.
Basis: D[i, j] ≤ λ(i, j, 0) due to initialization.Assume: D[i, j] ≤ λ(i, j, k−1) before kth iteration.Show: D[i, j] ≤ λ(i, j, k) after kth iteration.Induction: Either λ(i, j, k) = λ(i, j, k − 1) or
λ(i, j, k) = λ(i, k, k−1) + λ(k, j, k−1)
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 21
12

Floyd-Warshall Example
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 22
Johnson’s Algorithm for Sparse Graphs
Idea of Johnson’s Algorithm:Run Dijkstra’s algorithm n times.Obtain O(V E lg V ) time using binary heaps.Better than O(V 3) if E is o(V 2)
Problem: Negative weights.
Solution: Clever way to transform the graph so that all weights are positive
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 23
13
Johnson’s Algorithm
Johnson(G,w, s)(G′, w′) ← (G,w) with new vertex s, w′(s, v) = 0if Bellman-Ford(G′, w′, s) = false
error negative-weight cyclefor (u, v) ∈ G
w(u, v) ← w(u, v) + δ′(s, u)− δ′(s, v)for each vertex u in G
Dijkstra(G, w, u)for each vertex v in G
D[u, v] ← δ(u, v)− δ′(s, u) + δ′(s, v)return D
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 24
Johnson’s Algorithm Analysis
Triangle inequality, δ′(s, v) ≤ δ′(s, u) + w(u, v), implies0 ≤ δ′(s, u) + w(u, v)− δ′(s, v) = w(u, v).Thus, w(u, v) ≥ 0 for all edges (u, v).
For any path p from u to v, w(p) = w(p) + δ′(s, u)− δ′(s, v) because of thetelescoping sum.
Johnson is O(V E lg V ) if binary heaps are used for Dijkstra.
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 25
14

Johnson Example
CS 5633 Analysis of Algorithms Chapter 24 and 25: Slide – 26
15



![Shortest-pathg rocerys hoppingjustinppearson.com/pages/shortest-path-grocery-shopping/shortest-path-grocery-shopping.pdfGraphPlot[meshGraph, ImageSize→ Full] Getthegraphvertices](https://img.pdfslide.net/doc/110x75/5ec9717fc18133726b4d56ff/shortest-pathg-rocerys-h-graphplotmeshgraph-imagesizea-full-getthegraphvertices.jpg)