Embed Size (px)
Citation preview

1
Signali i sustaviSignali i sustavi
Sustavi drugog reda
2
Definicija i blok dijagramDefinicija i blok dijagram
Sustav drugog reda ima dva elementa s memorijom, dakle, dva integratora u blok dijagramu.Opisan je s diferencijalnom jednadžbom drugog reda, odnosno s dvije jednadžbe prvog reda.
3
Definicija i blok dijagramDefinicija i blok dijagram
),,( 2122 uxxf
dtdx
=
),,( 21 uxxgy =
),,( 2111 uxxf
dtdx
= 1001 )( xtx = 0 za tt >
2002 )( xtx =
Sustav s ulazom u i izlazom y je drugog reda ako se mogu identificirati dvije varijable stanja x1 i x2.

2
4
Definicija i blok dijagramDefinicija i blok dijagram
u
f1
f2
g
∫
∫
y
v1
v2
x1
x2
Opći oblik blok dijagrama za sustav drugog reda može se nacrtati s funkcijskim blokovima samo s jednim izlazom:
5
Definicija i blok dijagramDefinicija i blok dijagram
x =
xx
1
2
Sustav drugog reda:
0)0( xx =
),,( 21 uxxgy =
),( udtd xfx
=),,(
),,(
2122
2111
uxxfdt
dx
uxxfdtdx
=
=
),( uy xg=
Vektor stanja:
6
Definicija i blok dijagramDefinicija i blok dijagram
.))(),(()(0
0 ∫+=t
t
dut τττxfxx
Dobivena je integralna jednadžba u kojoj sefunkcija stanja x(t) pojavljuje implicitno, pa je nije moguće jednostavno riješiti.To je oblik koji se koristi u numeričkim postupcima.
Rješenje vektorske diferencijalne jednadžbe možemo napisati formalno u obliku kao da se radi o diferencijalnoj jednadžbi prvog reda:
3
7
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
Opći oblik jednadžbe stanja:
BuAxx +=→
+
⋅
=
&
&
&
2
1
2221
1211
2
1
2221
1211
2
1
uu
bbbb
xx
aaaa
xx
Može se transformirati u diferencijalnu jednadžbu drugog reda:
).(T),(T
222
111
tvxxxtuxxx
=∆+−=∆+−
&&&
&&&
2221212221212
2121112121111
ububxaxaxububxaxax
+++=+++=
&
&
Linearni sustav vremenski stalan
8
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
Pri tom su:A matrice tragT 2211 aa +=
A od tadeterminan∆ 21122211 aaaa −=
222121222111221121111121
212111212222212111222112
)()()()()()(
ubububabaubabatvubububabaubabatu&&
&&
++−+−=++−+−=
Ako su obje konstante a12 = a21 = 0 (matrica A je dijagonalna) sustav je opisan s dvije razvezane jednadžbe prvog reda.
9
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
,02 20 =++ xxx ωα&&&
2α = − T, α je faktor prigušenja,
ω0 je frekvencija neprigušenog titranja.
,20 ∆=ω
Često se jednadžba drugog reda nepobuđenog sustava piše u obliku:

4
10
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
.X)( ptetx =
Uvrštenje vodi do karakteristične jednadžbe:
,02 20
2 =++ ωαpp
čija rješenja su karakteristične ili prirodne frekvencije sustava drugog reda.
Pretpostavimo da je rješenje eksponencijala:
11
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
±−>=−>>±−
=−±−=
dd
0
0d20
212
<<0 za0 za0 za
pωαωα
ωααωααα
ωααj
220d
20
2d
αωω
ωαα
−=
−=
tt eex 21 p2
p1 XX +=Rješenje je oblika:
12
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
zavisno od veličina α i ω0 postoji tzv.nadkritično prigušenje α > ω0,kritično prigušenje α = ω0,podkritično prigušenje α < ω0,neprigušeni slučaj α = 0.

5
13
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
SIMULINK primjer
14
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
Rješenje se može napisati u obliku:
.)pp(p)0()0(
)pp(p)0()0()( 21 p
12
1p
21
2 tt exxexxtx−
−+
−−
=&&
).0(x&Proizvoljne konstante određuju početni uvjeti x(0) i
15
Rješenje homogene jednadžbe stanja možese dobiti pretpostavkom da eksponencijalne funkcije x1 = X1ept , x2 = X2ept zadovoljavaju skup od dvije jednadžbe:
2221212
2121111
xaxaxxaxax
+=+=
&
&
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda

6
160X)(X0XX)(
222121
212111
=−+=+−
paaapa
Dobije se sustav karakterističnih algebarskih jednadžbi:
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
2221212
2121111
XXXXXX
aapaap
+=+=
( )( ) ptpt
ptptex
ex
eaaepeaaep
xaxaxxaxax pt
pt
2221212
2121111XX
2221212
2121111
XXXXXX
22
11
+=+=
→+=+= =
=
&
&
17
Da bi sustav karakterističnih jednadžbi dao rješenja za amplitude X1, X2 različite od nule, mora determinanta sustava isčezavati,
.0)(
)(
2221
1211 =−
−paa
apa
.0T2 =∆+− pp
To daje polinom drugog stupnja:
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
18
odakle slijede prirodne frekvencije p1 i p2 za koje ept zadovoljava jednadžu.
Rješenje se može napisati u obliku:
.XX)(,XX)(
21
21
p22
p212
p12
p111
tt
tt
eetxeetx
+=
+=
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda

7
19
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
Druge dvije konstante proizlaze iz prvih uvrštenjem u jednadžbe stanja za t = 0.
21
20121021111 pp
)p(X−
+−=
xaxa12
20121011112 pp
)p(X−
+−=
xaxa
21
20222102121 pp
)p(X−
−+=
xaxa
12
20122102122 pp
)p(X−
−+=
xaxa
Nezavisne su samo dvije konstante i one se odrede iz dva početna uvjeta.
20
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
12
21
axdt
dx
xdtdx
=
=
a01
0a0
0a10
22
12
21
11
2
1
2
1
−=∆==
===
⋅
=
aa
Taa
xx
xx&
&
∫ ∫
x2 x1
a
dtdx2
dtdx1
Primjer: Najjednostavniji slučaj dva integratora s povratnom vezom.
21
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
0aa
1 2 =−=−
−p
pp
⋅
=
20
10
2
1
)ch()sh(
)sh()ch()()(
xx
tαt
tαttxtx
ααα
0a za >
α±=±= ap12
Determinanta sustava mora isčezavati
. . .
x(t) = Φ(t)x0 , gdje je Φ(t) − prijelazna matrica.

8
22
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
.12
10
2
2
10
1 =
−
xx
xx
α
Veza između x1(t) i x2(t).Jednadžbu krivulje F(x1, x2) = 0 možemo dobiti eliminacijom vremena.Uzmimo početno stanje x10, (x20 = 0):
23
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
0
Im
Re α -α
x1 0
x2
x10
∞→∞→∞→∞→
txtx
za za
2
1 Nestabilan sustav. Ravnoteža x = 0 se ne dosegne − sedlo
24
1xx
2
10
2
2
10
1 =
+
xx
ω
0
Im
Re-jωd
jωd
0
x2
x1
Zatvorena krivulja − periodičan proces. Trajektorija obilazi oko točke ravnoteže − fokus.
02012p0a za ωω j±=−±=<Primjer:
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda

9
25
⋅
=
2
1
22212
1 10xx
aaxx&
&
djωα ±−=12p 220 αωω −=d
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
∫ ∫
x2 x1
a22
dtdx2
dtdx1
+
a21
26
12
10d
2
2
10
1 =
+
−− tt ex
xexx
αα ω
0
Im
Re -α
-jωd
jωd
x2
0 x1
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
27
0 10
20 30
0 1
2 3
4 -1.5
-1 -0.5
0 0.5
1 1.5
t x1
x2
10
28
0 10
20 30
01
2 3
-0.5
0
0.5
1
t x1
x2
29
0 10
2030
0 1
2 0
0.1 0.2 0.3 0.4 0.5 0.6
t x1
x2
30
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
0
Im
Rep2 p1
0
x2
x1
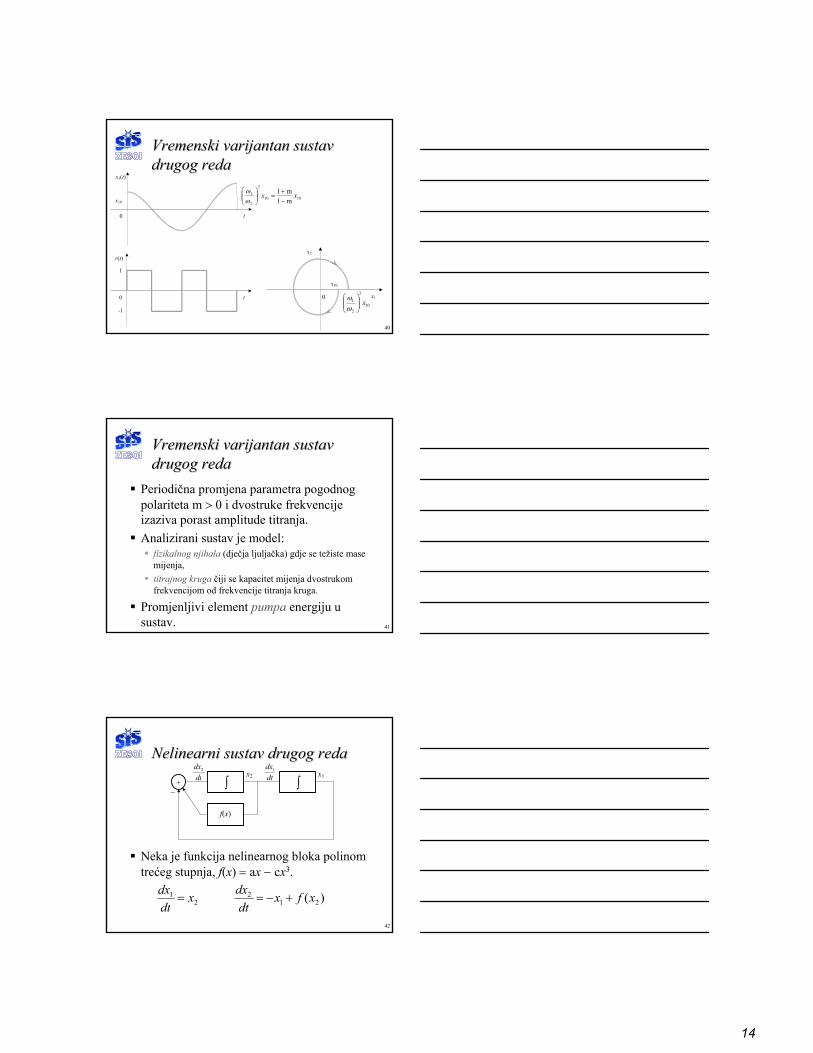
stabilni čvorSlučaj realnih i različitih p1 i p2,
a) p1, p2 < 0

11
31
Vladanje i svojstva sustava Vladanje i svojstva sustava drugog redadrugog reda
0
Im
Re p1 p2
0
x2
x1
nestabilni čvorSlučaj realnih i različitih p1 i p2
b) p1, p2 > 0
32
SIMULINK primjer
33
Vremenski Vremenski varijantanvarijantan sustav sustav drugog redadrugog reda
)()()()(
12
21
txtatxxtx−=
=&
&
∫ ∫
x2 x1
dtdx2
dtdx1
a(t) = α + βf(t)
-1
Pojačanje a(t) u petlji blok dijagrama je zavisno od vremena.

12
34
Vremenski Vremenski varijantanvarijantan sustav sustav drugog redadrugog reda
a t f t( ) ( )= +α βHillova diferencijalna jednadžba,))(( 121 xtfxx βα +−== &&&
Za f(t) = 2cos 2t izlazi Mathieu − ova diferencijalna jednadžba:
.0)2cos2( 11 =++ xtx βα&&
.0))(( 11 =++ xtfx βα&&
Vremenska funkcija a(t) pojačanja će utjecati na vladanje sustava.
35
Vremenski Vremenski varijantanvarijantan sustav sustav drugog redadrugog reda
Za f(t) = r(t) pravokutan oblik, gdje je funkcija pojačanja konstantna po odsječcima (Meissnerova jednadžba). Jednadžba se može rješavati po invervalimakao diferencijalna jednadžba s konstantnim koeficijentima.
36
Pretpostavimo a(t)
))(m1()( trαta +=
Za 1,3,5,... četvrtinu perioda jednadžba stanja je
.0)m1( 12112112 =+=+−= xωxxxxαx &&&&
Za 2,4,6,... četvrtinu perioda jednadžba stanja je .0)m1( 1
2212112 =+=−−= xωxxxxαx &&&&
≤−<−
≤+<=
ππ
π
α
αtr
)m1(2
12
)m1(01)(
Vremenski Vremenski varijantanvarijantan sustav sustav drugog redadrugog reda

13
37
Vremenski Vremenski varijantanvarijantan sustav sustav drugog redadrugog reda
Prvi slučaj: ).m1(21 += αω
Drugi slučaj: ).m1(22 −= αω
Rješenje izraženo s početnim uvjetima je:
.cossin
,sincos
20102
20101
ωtxωtωxx
ωtωxωtxx
+−=
+=
U oba slučaja je to rješenje vremenski nepromjenljivog sustava.
38
Vremenski Vremenski varijantanvarijantan sustav sustav drugog redadrugog reda
Kao početno stanje u prvom intervalu uzmimo: .0 ,0 2010 ≠= xx
Odredimo rješenje gornjih diferencijalnih jednadžbi u 1, 2, 3 i 4. vremenskom odsječku.U svakom odsječku ćemo smatrati da vrijeme počinje od t = 0.Kao početno stanje uzet ćemo krajnje stanje iz prethodnog vremenskog intervala.
39
Vremenski Vremenski varijantanvarijantan sustav sustav drugog redadrugog reda
Uz dane pretpostavke dobije se izraz za amplitudu titranja:
.m1m1)2( 1010
2
2
11 xx
ωωx
−+
=
=π
14
40
Vremenski Vremenski varijantanvarijantan sustav sustav drugog redadrugog reda
1010
2
2
1
m1m1 xx
−+
=
ωω
0
x1(t)
x10
t
0
1
t
-1
r(t)
10
2
2
1 x
ωω
x10
x1 0
x2
41
Vremenski Vremenski varijantanvarijantan sustav sustav drugog redadrugog reda
Periodična promjena parametra pogodnog polariteta m > 0 i dvostruke frekvencije izaziva porast amplitude titranja.Analizirani sustav je model:
fizikalnog njihala (dječja ljuljačka) gdje se težiste mase mijenja,titrajnog kruga čiji se kapacitet mijenja dvostrukom frekvencijom od frekvencije titranja kruga.
Promjenljivi element pumpa energiju u sustav.
42
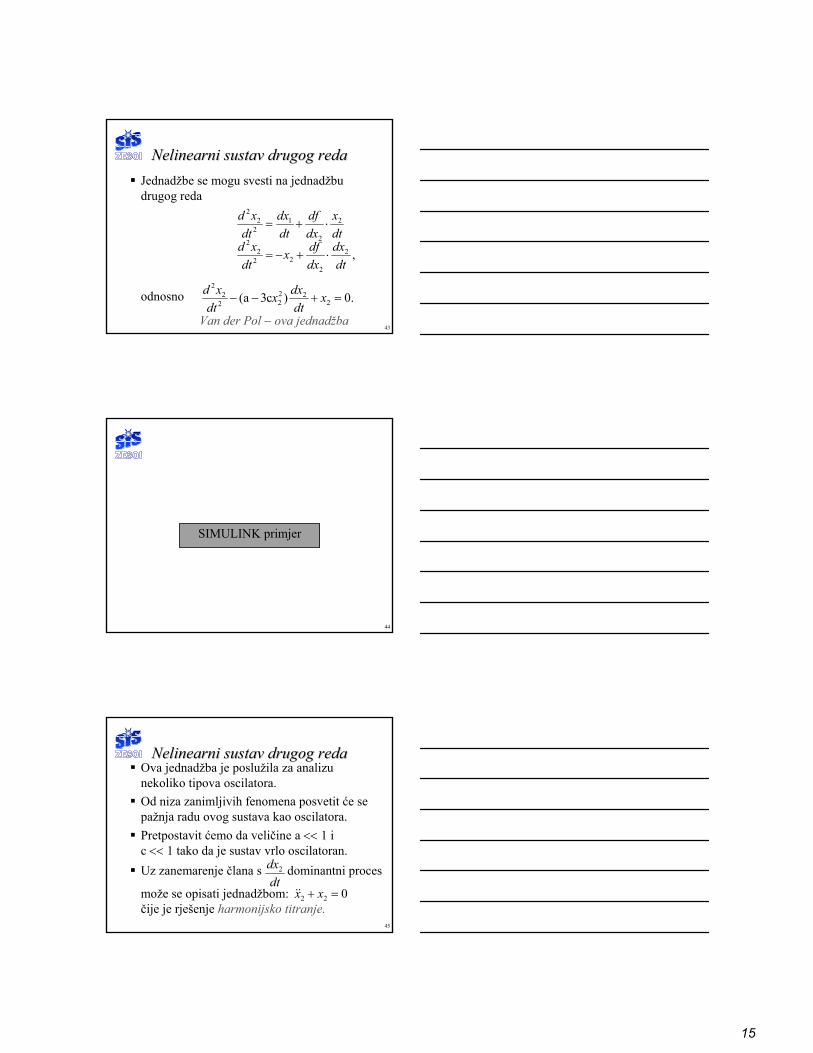
Nelinearni sustav drugog redaNelinearni sustav drugog reda
)( 212
21 xfx
dtdxx
dtdx
+−==
∫ ∫
x2 x1 dtdx2
dtdx1
+
f(x)
−
Neka je funkcija nelinearnog bloka polinom trećeg stupnja, f(x) = ax − cx3.
15
43
Nelinearni sustav drugog redaNelinearni sustav drugog reda
dtx
dxdf
dtdx
dtxd 2
2
12
22
⋅+=
odnosno .0)c3a( 222
222
2
=+−− xdt
dxxdt
xd
Van der Pol − ova jednadžba
,2
222
22
dtdx
dxdfx
dtxd
⋅+−=
Jednadžbe se mogu svesti na jednadžbu drugog reda
44
SIMULINK primjer
45
Nelinearni sustav drugog redaNelinearni sustav drugog reda
Uz zanemarenje člana s dominantni proces
može se opisati jednadžbom:čije je rješenje harmonijsko titranje.
dtdx2
022 =+ xx&&
Ova jednadžba je poslužila za analizu nekoliko tipova oscilatora.Od niza zanimljivih fenomena posvetit će se pažnja radu ovog sustava kao oscilatora.Pretpostavit ćemo da veličine a << 1 i c << 1 tako da je sustav vrlo oscilatoran.
16
46
Nelinearni sustav drugog redaNelinearni sustav drugog reda
Pretpostavimo zato rješenje u obliku:x A t t= ( ) sin( )
gdje je A(t) sporo mijenjajuća amplitudaoscilacija.
ttAttAx cos)(sin)( += &&
ttAttAttAx sin)(cos)(2sin)( −+= &&&&&
Mali srednji član će utjecati na sporo mijenjanje amplitude titranja.
xx &)c3a( 2−
Za očekivati je da će se proces moći opisati približno s harmonijskim titranjem.
47
Nelinearni sustav drugog redaNelinearni sustav drugog reda
.0cossin)(c3cos)(acos)(2
,0sin)(c)(3sin)(asin)(sin)(23
32
=+−
=+−−
tttAttAttA
ttAtAttAttAttA&
&&&&
Iz druge jednadžbe izlazi:
( ) .03coscos4c3cos)(acos)(2 3 =−+− ttAttAttA&
Da bi jednadžba bila zadovoljena, svi članovi koji množe sin(t) i koji množe cos(t) moraju biti jednaki nuli.
48
Nelinearni sustav drugog redaNelinearni sustav drugog redaEfekt treće harmoničke komponente (3t) semože zanemariti, pa dobijemo jednadžbu za sporo mijenjanje amplitude:
.0)(4c3)(a)(2 3 =+− tAtAtA&
Stalna amplituda 0)( =tA& uspostavit će se pri:
.c3a4Ai 0Atj.0)(
4c3a)( 2
ss2
3,21===
− tAtA
17
49
Nelinearni sustav drugog redaNelinearni sustav drugog reda
.
1AA1
A)(a
2
0
s
s
te
tA−
−
+
=
Pretpostavimo da je početno stanje usustavu izazvalo početnu amplitudu titranjaA(0) = A0.
Rješenjem jednadžbe za amplitudu, dobit ćemo izraz za utitravanje oscilatora od A0do As:
50
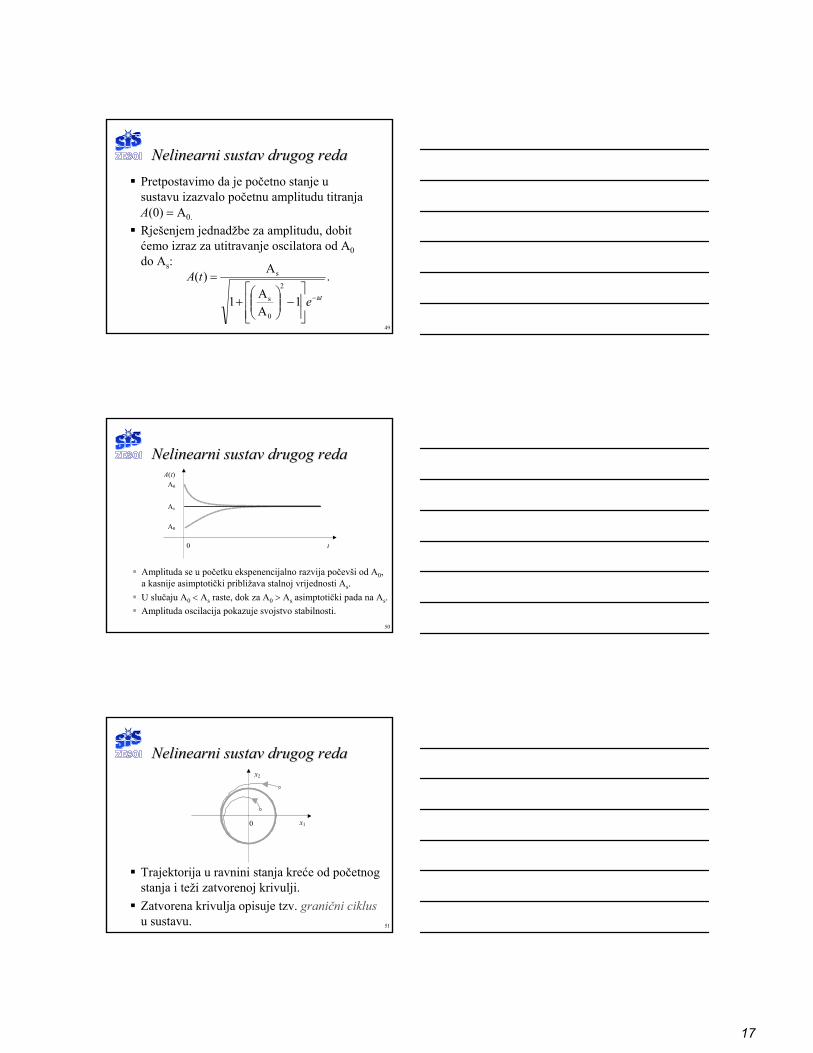
Nelinearni sustav drugog redaNelinearni sustav drugog reda
A0
t 0
A(t)
As
A0
Amplituda se u početku ekspenencijalno razvija počevši od A0, a kasnije asimptotički približava stalnoj vrijednosti As.U slučaju A0 < As raste, dok za A0 > As asimptotički pada na As.Amplituda oscilacija pokazuje svojstvo stabilnosti.
51
Nelinearni sustav drugog redaNelinearni sustav drugog reda
Trajektorija u ravnini stanja kreće od početnog stanja i teži zatvorenoj krivulji.Zatvorena krivulja opisuje tzv. granični ciklusu sustavu.
x2
x1 0

18
52
Nelinearni sustav drugog redaNelinearni sustav drugog reda
Za razliku od zatvorenih trajektorija ulinearnom sustavu, gdje početno stanje određuje veličinu zatvorene krivulje, ovdjeparametri nelinearnog funkcijskog bloka (a, c)određuju veličinu zatvorene trajektorije.U njenoj neposrednoj blizini nema drugihtrajektorija.Takve trajektorije se nazivaju izoliranim.
![Radio talasi i prenos informacija (signali, modulacija) talasi i prenos informacija.pdf · Radio talasi i prenos informacija (signali, modulacija) [586.] Sta su signali? a) Signali](https://img.pdfslide.net/doc/110x75/5e0a0242f0ac9e00440613d8/radio-talasi-i-prenos-informacija-signali-modulacija-talasi-i-prenos-informacijapdf.jpg)




![Uvod - vub.hr · Web viewNavesti popis literature prema pravilima za navođenje literature koja se nalaze u Uputama za izradu završnog rada. Primjeri: [1] Vrhovski Z. Signali i sustavi:](https://img.pdfslide.net/doc/110x75/606a6d1ac3eaa45c5c505a1a/uvod-vubhr-web-view-navesti-popis-literature-prema-pravilima-za-navoenje-literature.jpg)























